ГОСТ Р 57209-2016
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Вибрация
РУКОВОДСТВО ПО ВЫБОРУ ВИБРОСТЕНДОВ
Оборудование для определения динамических свойств конструкций
Vibration. Guidance for selection of vibration generating machines. Equipment for measurements of dynamic properties of structures
ОКС 17.160
Дата введения 2017-10-01
Предисловие
1 РАЗРАБОТАН Федеральным государственным унитарным предприятием "Крыловский государственный научный центр" (ФГУП "КГНЦ"), Открытым акционерным обществом "Научно-исследовательский центр контроля и диагностики технических систем" (АО "НИЦ КД")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 183 "Вибрация, удар и контроль технического состояния"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 2 ноября 2016 г. N 1572-ст
4 ВВЕДЕН ВПЕРВЫЕ
5 ПЕРЕИЗДАНИЕ. Март 2019 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Задача выбора вибростенда встает каждый раз, когда необходимо провести испытания на воздействие вибрации для новой продукции или провести эти испытания в режиме, ранее для данной продукции не применявшемся. При этом приходится решать, какому из вариантов отдать предпочтение: приобрести новое испытательное оборудование, модернизировать имеющееся, арендовать оборудование у другой испытательной лаборатории или передать проведение испытаний в полном объеме специализированной лаборатории. В процессе принятия решения следует учитывать ряд факторов:
- цель испытаний [например, определение вибропрочности и (или) виброустойчивости в заданных условиях окружающей среды (в режиме обычных или ускоренных испытаний); определение динамических характеристик конструкции; диагностирование; калибровка];
- требования к испытаниям;
- условия проведения испытаний [например, с возбуждением одного или нескольких типов вибрации; только на вибрацию или в сочетании с другими воздействиями (например, одновременное проведение вибрационных и климатических испытаний)];
- особенности испытуемого объекта.
Настоящий стандарт распространяется только на оборудование, применяемое в испытаниях с целью определения динамических свойств конструкций разного вида. Установленная стандартом процедура выбора исходит, в первую очередь, из требований к таким испытаниям. Однако пользователь стандарта должен иметь в виду, что на выбор испытательного оборудования может существенно повлиять специфика как условий испытаний, так и испытуемого объекта.
Если испытательное оборудование предполагается использовать в испытаниях разных видов, то это также должно быть учтено при его выборе. Так, если оборудование будет использовано и в испытаниях на вибропрочность или виброустойчивость, и в испытаниях для определения динамических свойств конструкций, то при выборе следует вместе с настоящим стандартом руководствоваться рекомендациями ГОСТ Р ИСО 10813-1. В настоящем стандарте предполагается, что выбор оборудования определяется, прежде всего, его способностью возбудить в испытуемой конструкции вибрацию определенного уровня. Чтобы в возбуждаемой вибрации отсутствовали нежелательные составляющие, необходимо использовать соответствующую систему управления испытаниями, однако вопрос выбора системы управления в настоящем стандарте не рассматривается.
Необходимо иметь в виду, что вибростенд (вибровозбудитель) относится к сложным видам оборудования, правильный выбор которого возможен лишь при соответствующей квалификации. В такой ситуации покупатель зачастую вынужден обращаться к помощи третьей стороны. Использование настоящего стандарта может помочь покупателю оценить, насколько обоснованным будет решение по выбору вибростенда, предложенное ему третьей стороной. Кроме того, настоящий стандарт могут использовать проектировщики и изготовители испытательного оборудования, чтобы оценить современные требования рынка данной продукции.
1 Область применения
Настоящий стандарт устанавливает руководство по выбору вибростенда (вибровозбудителя) для проведения испытаний с целью определения частотных характеристик конструкции и степени усиления или ослабления вибрации при ее распространении по конструкции (далее - испытания). Такие испытания могут быть выполнены в натурных или в лабораторных условиях по ГОСТ ИСО 7626-1, ГОСТ ИСО 7626-2, ГОСТ ИСО 7626-5 и ГОСТ Р ИСО 10846-1, а также ГОСТ Р ИСО 10846-2, ГОСТ Р ИСО 10846-5.
Процедура выбора основана на возможности развивать требуемую вынуждающую силу одним вибровозбудителем. В то же время для возбуждения массивных конструкций, таких как дамбы и мосты, обычно применяют одновременно несколько вибровозбудителей с соответствующим согласованием фаз возбуждения. В этом случае развиваемая суммарная сила должна быть такой же, как и рассчитанная по 6.4 для единственного вибровозбудителя.
Рекомендации настоящего стандарта могут быть использованы при выборе оборудования для модальных испытаний (определение собственных частот, форм колебаний и коэффициентов демпфирования конструкции), однако такие испытания, как правило, требуют учета большего числа факторов, чем рассмотрено в настоящем стандарте.
Настоящий стандарт распространяется на возбуждение поступательной вибрации. Рекомендации по выбору испытательного оборудования для возбуждения угловой вибрации приведены в [1].
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ 31368.3 Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 3. Косвенный метод определения динамической жесткости упругих опор для поступательной вибрации
ГОСТ 31368.4 Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 4. Динамическая жесткость неопорных кругах элементов конструкций для поступательной вибрации
ГОСТ ИСО 7626-1 Вибрация и удар. Экспериментальное определение механической подвижности. Основные положения
ГОСТ ИСО 7626-2 Вибрация и удар. Экспериментальное определение механической подвижности. Измерения, использующие одноточечное поступательное возбуждение присоединенным вибровозбудителем
ГОСТ ИСО 7626-5 Вибрация и удар. Экспериментальное определение механической подвижности. Часть 5. Измерения, использующие ударное возбуждение возбудителем, не прикрепляемым к конструкции
ГОСТ Р ИСО 2041 Вибрация, удар и контроль технического состояния. Термины и определения
ГОСТ Р ИСО 10813-1 Вибрация. Руководство по выбору вибростендов. Часть 1. Оборудование для испытаний на воздействие вибрации
ГОСТ Р ИСО 10846-1 Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 1. Общие принципы измерений
ГОСТ Р ИСО 10846-2 Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 2. Прямой метод определения динамической жесткости упругих опор для поступательной вибрации
ГОСТ Р ИСО 10846-5 Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 5. Метод входной частотной характеристики для определения переходной динамической жесткости упругих опор в области низких частот для поступательной вибрации
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ Р ИСО 2041, ГОСТ ИСО 7626-1 и ГОСТ Р ИСО 10846-1.
4 Испытания
4.1 Общие положения
Целью испытаний может быть определение:
- частотных характеристик объектов (в общем случае - комплексных) в широком диапазоне частот;
- степени ослабления или усиления вибрации при ее распространении по конструкции;
- модальных характеристик объектов (собственных частот, форм мод, коэффициентов демпфирования).
Знание динамических характеристик конструкции может быть использовано, например, в целях:
- проектирования механических систем (зданий, машин, транспортных средств и их частей) с низкими уровнями вибрации;
- расчета систем виброизоляции и оценки эффективности средств, используемых для ослабления вибрации.
В данном виде испытаний уровень возбуждения не столь важен, как в испытаниях на воздействие внешних факторов (см. ГОСТ Р ИСО 10813-1), при условии сохранения линейности отклика конструкции. Однако этот уровень должен быть достаточным, чтобы отклик конструкции значительно превышал уровень шумового пьедестала на частотах, на которых механический импеданс конструкции достигает своих максимальных значений. В случае конструкций с нелинейным поведением возбуждают вибрацию того же уровня, что наблюдают в реальных условиях ее применения.
При испытаниях в лабораторных условиях испытуемую конструкцию свободно вывешивают или устанавливают на жесткой опоре в зависимости от того, как определено в соответствующих технических условиях (см., например, ГОСТ ИСО 7626-2). Возбуждение может быть одноточечным или распределенным по нескольким точкам.
В полевых условиях вибровозбудитель либо присоединяют, либо не присоединяют к испытуемой конструкции. Как правило, при установке вибровозбудителя необходимо обеспечить высокую жесткость его соединения с объектом в направлении возбуждения. При этом в поперечном направлении соединение должно быть податливым, допускающим угловые колебания вибровозбудителя.
4.2 Виды возбуждения
ГОСТ ИСО 7626-2 и ГОСТ ИСО 7626-5 устанавливают различные возможные виды возбуждения, которые могут быть применены в испытаниях для определения динамических характеристик конструкций.
В случае линейного поведения испытуемой конструкции можно использовать любой вид возбуждения из установленных ГОСТ ИСО 7626-2 и ГОСТ ИСО 7626-5. В противном случае допускается возбуждение только гармонической вибрации.
5 Вибровозбудители
5.1 Основные типы вибровозбудителей
Вибровозбудитель представляет собой исполнительное устройство системы воспроизведения вибрации, предназначенное для силового или кинематического возбуждения испытуемого объекта. Параметры такого возбуждения определяются задачами и условиями проведения испытаний.
Для испытаний с целью определения динамических характеристик конструкций обычно используют электродинамические, электромагнитные, пьезоэлектрические или магнитострикционные вибровозбудители. Для эффективного решения проблем воспроизведения вибрации в низкочастотной области может оказаться более предпочтительным использование пневматических, гидравлических или механических вибровозбудителей.
5.2 Основные характеристики вибровозбудителей
Наиболее важными с точки зрения правильного выбора вибровозбудителя в целях его применения для определения динамических свойств конструкций являются следующие характеристики:
- номинальная вынуждающая сила;
- допустимая статическая нагрузка;
- номинальный диапазон частот;
- пределы воспроизведения перемещения, скорости и ускорения;
- коэффициент гармонических искажений;
- паразитные колебания в точке передачи возбуждения;
- резонансные частоты.
Другой важной характеристикой вибровозбудителя является способ его соединения с испытуемой конструкций, требуется ли для установки вибровозбудителя использовать механический упор. Кроме того, для передачи силового возбуждения на конструкцию входной импеданс вибровозбудителя должен быть много меньше входного импеданса испытуемой конструкции в точке возбуждения.
5.3 Особенности вибровозбудителей разных типов
5.3.1 Электродинамический вибровозбудитель
Электродинамический вибровозбудитель представляет собой устройство для возбуждения колебаний, в котором использован электродинамический принцип преобразования электрической энергии в механическую, основанный на эффекте силового воздействия постоянного магнитного поля на проводник с переменными током. В большинстве конструкций электродинамического возбудителя проводник с током выполняется в виде катушки, расположенной в кольцевом зазоре магнитопровода, подмагничивание которого осуществляется с помощью обмотки с постоянным током или постоянного магнита.
Условия работы электродинамического возбудителя таковы, что создаваемая им вынуждающая сила пропорциональна току возбуждения. Это свойство электродинамического вибровозбудителя позволяет эффективно использовать его в самом широком диапазоне испытаний.
Другим важным достоинством вибровозбудителя данного типа является его широкополосность (до 15000 Гц) и возможность относительно простого согласования электрического сопротивления с выходным сопротивлением усилителя мощности в рабочем диапазоне частот.
В большинстве моделей электродинамических вибровозбудителей магнитопровод жестко закреплен в корпусе, а катушка с жестко соединенным с ней вибростолом установлена в корпусе с помощью неравножестких упругих элементов (мембран).
Основные параметры типового ряда электродинамических вибровозбудителей приведены в ГОСТ Р ИСО 10813-1.
Установка и крепление электродинамических вибровозбудителей определяются целью и условиями испытаний. Обычно такие вибровозбудители не могут выдерживать значительные статические нагрузки, поэтому при необходимости создать в ходе испытаний большие статические деформации конструкции применяют специальные разгружающие устройства и установочную арматуру.
5.3.2 Электромагнитный вибровозбудитель
Электромагнитный вибровозбудитель представляет собой устройство для возбуждения колебаний испытуемого объекта, в котором использован электромагнитный принцип преобразования электрической энергии в механическую, основанный на эффекте силового воздействия переменного поля на ферромагнитные тела. Вынуждающая сила изменяется пропорционально квадрату силы тока в обмотке возбуждения. Для линеаризации процесса магнитный поток в магнитопроводе вибровозбудителя поляризуют, например, посредством постоянного магнитного поля. Конструктивно электромагнитные вибровозбудители имеют однотактное или двухтактное (дифференциальное) исполнение. Двухтактное исполнение позволяет добиться более низкого значения коэффициента гармонических искажений.
При подготовке к испытаниям, как правило, приходится принимать во внимание постоянные составляющие силы электромагнитного взаимодействия, а также массу якоря вибровозбудителя, особенно когда объектами испытаний являются легкие и/или упругие конструкции. В этих случаях применяют разгрузочные устройства и элементы компенсации отрицательной жесткости, обусловленной постоянными составляющими электромагнитных сил.
К основным достоинствам электромагнитных вибровозбудителей относятся их повышенная эффективность и надежность, а к недостаткам - значительные нелинейные искажения и ограниченный рабочий диапазон.
5.3.3 Пьезоэлектрический вибровозбудитель
Пьезоэлектрический вибровозбудитель представляет собой устройство для возбуждения колебаний испытуемого объекта с использованием принципа деформации (изменения размеров) пьезоэлектрических элементов при воздействии на них электрического поля. В направлении силовых линий переменного электрического поля такие деформации могут достигать тысячных долей размеров пьезоэлемента.
Особенностью пьезоэлектрических вибровозбудителей является возможность обеспечения кинематического возбуждения тяжелых и сложных механических конструкций в широкой полосе частот (до 15 кГц). К другим преимуществам относится способность работать при высоких статических нагрузках (до 2000 кг/см), обеспечивая при этом высоконаправленное возбуждение. Недостатки пьезоэлектрического возбудителя связаны с техническими сложностями создания усилителя, способного эффективно передавать широкополосный сигнал на пьезоэлектрическое исполнительное устройство.
5.3.4 Пьезомагнитный вибровозбудитель
Работа пьезомагнитного вибровозбудителя основана на эффекте магнитострикции, заключающемся в деформации (изменении размеров) ферромагнитных материалов при воздействии на них магнитного поля.
Подобно пьезоэлектрическому вибровозбудителю, магнитострикционный вибровозбудитель способен осуществлять кинематическое широкополосное возбуждение (в диапазоне до 1 кГц) сложных и тяжелых конструкций. Кроме того, он допускает использование относительно дешевых усилителей мощности. Недостатком магнитострикционного вибровозбудителя является высокое энергопотребление.
5.3.5 Гидравлический вибровозбудитель
Гидравлический вибровозбудитель представляет собой устройство, в котором возбуждение колебаний испытуемого объекта обеспечивается за счет пульсаций давления жидкости в гидравлическом исполнительном механизме, управляемым сервоклапаном.
Основными достоинствами гидравлических вибровозбудителей являются:
- высокий уровень создаваемых перемещений (до 200 мм) и вынуждающих сил (до 10 мН);
- малый уровень поперечных колебаний рабочего органа (вибростола);
- большая допустимая статическая нагрузка (до нескольких тонн);
- простота и надежность конструкции.
К недостаткам гидравлических вибровозбудителей можно отнести:
- повышенный уровень нелинейных искажений в низкочастотной области (до 15%);
- относительно узкий частотный диапазон, не превышающий, как правило, 200 Гц.
Технические параметры типичных гидравлических вибровозбудителей приведены в ГОСТ Р ИСО 10813-1.
5.3.6 Механический вибровозбудитель
Механический вибровозбудитель представляет собой устройство, преобразующее механическую энергию привода. По принципу действия механические вибровозбудители делятся на вибровозбудители с принудительным кинематическим и центробежным возбуждением вибрации. Основными достоинствами механических вибровозбудителей являются:
- высокая эффективность;
- простота и надежность конструкции.
К основным недостаткам механических вибровозбудителей относятся:
- ограниченный рабочий диапазон частот (обычно от 5 до 100 Гц);
- повышенный уровень нелинейных искажений;
- отсутствие возможности возбуждения полигармонической вибрации.
Технические характеристики механических вибровозбудителей приведены в ГОСТ Р ИСО 10813-1.
5.3.7 Ударник
Типичный ударник молоткового типа состоит из жесткой массы, к которой с одной стороны может быть прикреплен датчик силы, а с другой - упругая насадка. Возможны варианты, когда датчик силы отсутствует, а на тыльный торец массы прикреплен датчик ускорения. Если основная масса ударника колеблется как жесткое тело, то выходной сигнал акселерометра будет пропорционален силе, приложенной к испытуемому объекту.
Ударник обеспечивает передачу на испытуемый объект усилия до 10 Н в диапазоне частот от 2 до 10000 Гц. Диапазон частот ударного возбуждения можно регулировать с помощью насадок по ГОСТ ИСО 7626-5.
Для испытания крупных объектов может использоваться ударник в виде большой массы либо подвешенной на тросах, либо свободно падающей вертикально вниз.
6 Рекомендации по выбору
6.1 Общие положения
Выбор испытательного оборудования определяется, в первую очередь, его функциональными возможностями и практичностью применения в конкретных условиях испытаний, включая требования к размерам, условиям установки, доступу к точкам возбуждения и пр. Кроме того, оборудование должно обеспечить требуемую точность оценки частотной характеристики испытуемого объекта. Это означает, что оно должно обладать способностью воспроизводить вибрацию достаточного уровня в пределах установленных допусков (по направлению возбуждения, по частотному составу) в диапазоне частот испытаний.
Минимально необходимый уровень возбуждения определяется, в свою очередь, фоновой вибрацией испытуемой конструкции и шумами в измерительной цепи. Возбуждаемая вибрация должна значительно превышать фоновую вибрацию в каждой точке измерений на каждой частоте испытаний, а электрический сигнал с датчика вибрации должен значительно превышать уровень собственных помех измерительного канала.
Если вибровозбудитель способен развивать постоянную силу во всем диапазоне частот испытаний, то требуемая сила будет зависеть от механического импеданса возбуждаемой конструкции и минимально необходимой скорости
в диапазоне частот испытаний [см. формулу (1)].
6.2 Процедура выбора
6.2.1 Определяют измерительную задачу (испытуемый объект, какие частотные характеристики и в каком диапазоне частот должны быть получены).
6.2.2 Собирают данные об объекте испытаний и условиях проведения испытаний, включая:
- тип испытуемого объекта (рамная конструкция, машина, виброизолятор, фундамент и т.д.);
- размеры и массу испытуемого объекта;
- условия испытаний (полевые или в лаборатории, доступ к точкам возбуждения и измерения вибрации, возможные способы установки вибровозбудителя и его согласования с испытуемым объектом и т.д.);
- уровень фоновой вибрации.
6.2.3 Оценивают и устанавливают ограничения на такие факторы, как направленность возбуждения, поперечные колебания, коэффициент искажений и т.п., которые могут повлиять на результат испытаний.
Примечание - Влияние некоторых факторов можно уменьшить за счет повторных измерений с последующим усреднением. Например, если в технических условиях установлено, что удары молотком по конструкции наносят несколько раз, то этим можно добиться направленности возбуждения в пределах ±5° от заданного направления. При соблюдении такого ограничения вносимая данным фактором погрешность в результат измерения модуля механического импеданса не превысит 1%.
6.2.4 Зная уровень фоновой вибрации, рассчитывают минимально необходимые среднеквадратичные значения ускорения ![]() , скорости
, скорости ![]() или перемещения
или перемещения ![]() , которые должен будет обеспечить выбранный вибровозбудитель.
, которые должен будет обеспечить выбранный вибровозбудитель.
Примечание 1 - Обычно вибрация, создаваемая вибровозбудителем, должна в пять-десять раз превышать фоновую вибрацию во всем диапазоне частот испытаний.
Примечание 2 - Если ускорение фоновой вибрации равномерно распределено во всем диапазоне частот испытаний, то минимально необходимые среднеквадратичные значения скорости ![]() и перемещения
и перемещения ![]() достигнут своего максимума на нижней границе этого диапазона.
достигнут своего максимума на нижней границе этого диапазона.
Примечание 3 - Высокий уровень ускорения фоновой вибрации, равномерно распределенной по всему диапазону частот испытаний, не позволяет использовать вибровозбудители, не способные создать значительных перемещений на низких частотах (например, пьезоэлектрического типа).
6.2.5 С помощью физического моделирования, испытаний на прототипах, справочных данных и т.п. получают предварительную грубую оценку механического импеданса конструкции в диапазоне частот испытаний. Рекомендации по получению оценки
для конструкций некоторых видов приведены в приложении А.
6.2.6 Оценивают вибрационную силу ![]() по формуле
по формуле
![]() , (1)
, (1)
где ![]() - минимальное среднеквадратичное значение скорости, которую должен обеспечить вибровозбудитель на частоте возбуждения f.
- минимальное среднеквадратичное значение скорости, которую должен обеспечить вибровозбудитель на частоте возбуждения f.
- механический импеданс испытуемой конструкции, входной или переходный в зависимости от целей испытаний;
- частота возбуждения.
Находят частоту возбуждения , на которой
![]() достигает своего максимума
достигает своего максимума , т.е.
![]() .
.
Если для возбуждения конструкции одновременно используют несколько вибровозбудителей, тогда в совокупности они должны развить ту же силу ![]() , что рассчитана по формуле (1), т.е.
, что рассчитана по формуле (1), т.е.
 , (2)
, (2)
где ![]() - сила, развиваемая n-м вибровозбудителем;
- сила, развиваемая n-м вибровозбудителем;
- число применяемых вибровозбудителей.
6.2.7 Выбирают вибровозбудитель, удовлетворяющий требованиям:
1) к условиям испытаний и характеристикам вибровозбудителя по 6.2.1-6.2.3;
2) к параметрам возбуждения:
- вибрационной силе на частоте
и силе
![]() во всем диапазоне частот испытаний;
во всем диапазоне частот испытаний;
- минимально необходимым среднеквадратичным значениям ускорения ![]() , скорости
, скорости ![]() и перемещения
и перемещения ![]() .
.
Примеры выбора вибровозбудителя в различных измерительных задачах приведены в приложении Б.
6.2.8 Выбирают преобразователь вибрации.
Преобразователь вибрации и устройства согласования выбирают из предположения, что электрическое напряжение на выходе преобразователя ![]() , соответствующее минимально необходимой скорости
, соответствующее минимально необходимой скорости ![]() в пять-десять раз превысит внутренние шумы измерительной цепи
в пять-десять раз превысит внутренние шумы измерительной цепи . При заданном значении
![]() коэффициент преобразования
коэффициент преобразования преобразователя может быть рассчитан по формуле
![]() . (3)
. (3)
Приложение А
(справочное)
Приближенная оценка механических импедансов для объектов некоторых видов
А.1 Общие замечания
В настоящем приложении приведены графики огибающих для механических импедансов типичных объектов некоторых видов. Эти графики построены на основе анализа результатов многочисленных испытаний (см. [1]) так, чтобы кривая огибающей лежала выше реальных частотных характеристик объектов данного вида с некоторым запасом. Таким образом, вид огибающей отличается от вида типичной частотной характеристики. Тем не менее, такая огибающая позволяет получить некоторую оценку сверху.
В разделе А.2 рассматриваются огибающие для входных и переходных механических импедансов виброизоляторов. В разделах А.3, А.4 и А.5 рассматриваются только входные механические импедансы для машин и машинных агрегатов, амортизированных рам и фундаментов соответственно.
Примечание 1 - По самой конструкции изолятор обладает ясно определенными точками входа и выхода (входным и выходным фланцами), которым соответствует некоторая переходная частотная характеристика. В то время как для других конструкций входная и выходная точки заранее неизвестны и должны быть определены в соответствующих технических условиях.
Поведение испытуемых объектов будет разным в разных диапазонах частот испытаний. В области нижних частот вид зависимости входного и переходного механических импедансов от частоты определяется тем, какие силы преобладают в механической системе: упругие или инерционные. В первом случае импеданс будет спадать обратно пропорционально частоте, т.е. по закону
, и иметь максимум на нижней границе диапазона частот испытаний. Примерами таких механических систем являются виброизоляторы (см. раздел А.2), амортизированные рамы (см. раздел А.4) и фундаменты (см. раздел А.5). В случае же жестко установленных машин, возбуждаемых через их лапы или общую рамную конструкцию (см. раздел А.3), импеданс
будет возрастать пропорционально частоте
.
На средних частотах конструкция ведет себя как многомассовая механическая система с упругими и демпфирующими свойствами. При этом на графике входного механического импеданса будут наблюдаться впадины и пики, связанные, как правило, с собственными колебаниями механической системы в целом и отдельных ее элементов. Впадинам будут соответствовать резонансы системы, а пикам - антирезонансы. Последние будут определять максимальное значение механического импеданса в данной области частот.
Дальнейший рост частоты приводит к тому, что входной импеданс становится зависимым от волновых свойств конструкции в точке возбуждения. Амплитуда колебаний будет зависеть от геометрических характеристик и упругих свойств (модулей упругости) элемента конструкции, непосредственно соединенного с вибровозбудителем. Обычно в случае машин и машинных агрегатов на упругих опорах или жестких лапах таким элементом конструкции будет опорная металлическая пластина.
Примечание - На графиках в разделах А.2-А.5 области частот с разным динамическим поведением объекта разделены между собой частотами перехода.
На практике при испытаниях машин и машинных агрегатов достаточно сложно обеспечить граничные условия для измерений импеданса холостого хода, позволяющих сформировать полную матрицу импедансов объекта по ГОСТ ИСО 7626-1. Поэтому в разделе А.3 рассматриваются импедансы свободно колеблющегося объекта, т.е. импедансы короткого замыкания.
А.2 Виброизоляторы
Максимальные значения входных (
) и переходных
(
) механических импедансов виброизоляторов, нагруженных массой
(см. рисунок А.1) могут быть оценены с использованием графика, изображенного на рисунке А.2.
При заданной статической жесткости изолятора в направлении возбуждения собственная частота его колебаний
может быть рассчитана по формуле (А.1):
![]() . (А.1)
. (А.1)
Тогда частоту перехода (см. рисунок А.2) можно определить из таблицы А.1.
|
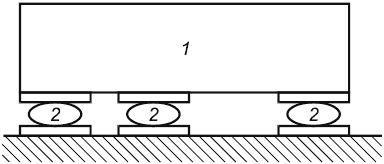
1 - машина (нагружающая масса); 2 - виброизолятор
Примечание - - масса нагрузки, приходящейся на один виброизолятор.
Рисунок А.1 - Виброизолятор, нагруженный массой машины
|
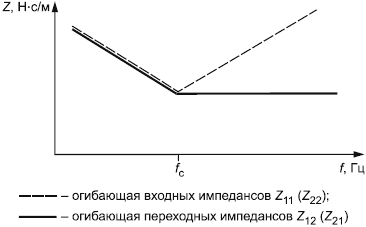
Примечание - Огибающая спадает по закону ![]() вплоть до частоты перехода
вплоть до частоты перехода (см. таблицу А.1).
Рисунок А.2 - Огибающие входных и переходных импедансов виброизолятора
Таблица А.1 - Соотношение между собственной частотой колебаний и частотой перехода (см. рисунок А.1) нагруженного изолятора
| От 2 до 5 | От 5 до 6 | От 7 до 11 | От 12 до 17 | От 18 до 30 | Более 30 |
| 163 | 250 | 315 | 630 | 800 | 1000 |
А.3 Машины и механизмы
А.3.1 Общие положения
График типичной огибающей входного импеданса короткого замыкания одиночной машины (см. рисунок А.3) или машинного агрегата в логарифмическом масштабе по обеим осям приведен на рисунке А.4.
Оценка сверху механических импедансов (см. рисунок А.4) для различных диапазонов частот может быть получена по формулам (А.2)-(А.4):
![]() , (А.2)
, (А.2)
![]() , (А.3)
, (А.3)
![]() , (А.4)
, (А.4)
где - частота;
- масса машины или машинного агрегата;
- толщина опорной пластины в точке возбуждения;
- модуль Юнга опорной пластины;
- плотность материала опорной пластины;
- коэффициент потерь материала пластины.
|
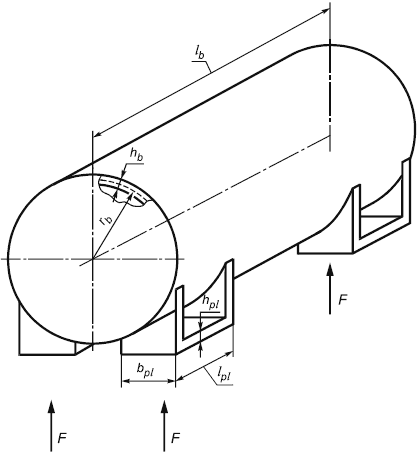
- вынуждающая сила;
- длина корпуса машины;
- толщина корпуса машины;
- радиус корпуса машины;
- длина лапы машины;
- толщина лапы машины;
- ширина лапы машины
Рисунок А.3 - Схематическое изображение машины
|
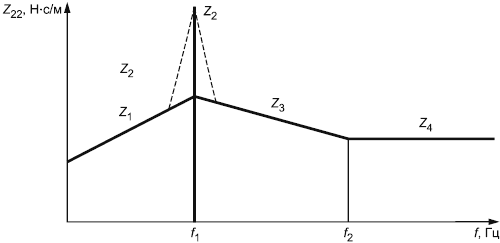
Рисунок А.4 - Типичная огибающая входных импедансов машины
График ![]() изображен на рисунке А.4 в виде отрезка прямой линии, соединяющего точки
изображен на рисунке А.4 в виде отрезка прямой линии, соединяющего точки ![]() и
и ![]() , а
, а представляет собой значение огибающей на частоте антирезонанса
. Значения частот перехода
и
зависят от вида машины и места возбуждения (см. А.3.2 и А.3.4).
Примечание - С некоторой степенью идеализации можно считать, что антирезонансу входной частотной характеристики соответствуют резонансные колебания соответствующего элемента механической системы, причем пик антирезонанса будет тем выше, чем меньше потерь энергии при возбуждении этих колебаний. Пик антирезонанса соответствует так называемой кольцевой частоте
оболочки машины.
А.3.2 Одиночные машины
А.3.2.1 Возбуждение корпуса механизма
В этом случае частоты перехода и
могут быть рассчитаны по формулам:
 ; (А.5)
; (А.5)
![]() , (А.6)
, (А.6)
где ,
- толщина и радиус корпуса (оболочки) машины соответственно (см. рисунок А.3).
А.3.2.2 Возбуждение лапы машины
В этом случае частота антирезонанса может быть рассчитана по формуле (А.5), а другую частоту перехода
определяют по формуле (А.7):
 , (А.7)
, (А.7)
где - толщина пластины лапы (см. рисунок А.3);
- ширина пластины лапы, т.е. расстояние от внутреннего, закрепленного края пластины до внешнего, свободного края (см. рисунок А.3).
А.3.3 Машинные агрегаты
А.3.3.1 Возбуждение через корпус машины
В этом случае ![]() , где
, где определяют по формуле (А.5), а
=40 Гц. Частоту перехода определяют по формуле (А.6).
А.3.3.2 Возбуждение через раму агрегата
В этом случае =40 Гц, а частоту
определяют по формуле (А.7), в которую подставляют параметры пластины рамы агрегата.
А.4 Амортизированные рамы
Максимумы входных импедансов нагруженной демпфированной рамы (см. рисунок А.5) могут быть оценены с помощью графика в логарифмическом масштабе по обеим осям, показанного на рисунке А.6.
Огибающая импедансов состоит из четырех отрезков прямых линий, которые соответствуют четырем диапазонам частот, пронумерованным латинскими цифрами от I до IV (см. рисунок А.6). Оценки сверху ![]() ,
, ![]() и
и ![]() входного импеданса для диапазонов частот I, II и IV соответственно могут быть рассчитаны по формулам:
входного импеданса для диапазонов частот I, II и IV соответственно могут быть рассчитаны по формулам:
![]() , (А.8)
, (А.8)
![]() , (А.9)
, (А.9)
![]() , (А.10)
, (А.10)
где - частота;
- общая статическая жесткость изоляторов;
- суммарная масса рамы и машины;
- толщина опорной пластины рамы;
- модуль Юнга материала рамы;
- плотность материала рамы.
Прямые линии ![]() и
и ![]() пересекаются в точке, соответствующей собственной частоте
пересекаются в точке, соответствующей собственной частоте , а прямая линия
![]() , представляющая собой оценку сверху импеданса в диапазоне частот III, соединяет на рисунке А.6 точки 1 и 2, где точка 1 соответствует
, представляющая собой оценку сверху импеданса в диапазоне частот III, соединяет на рисунке А.6 точки 1 и 2, где точка 1 соответствует ![]() , а точка 2 соответствует
, а точка 2 соответствует ![]() . Частоты перехода
. Частоты перехода ,
и
могут быть рассчитаны по формулам:
![]() , (А.11)
, (А.11)
 , (А.12)
, (А.12)
 , (А.13)
, (А.13)
где - безразмерный коэффициент, зависящий от отношения между длиной рамы
и ее шириной
, как показано на рисунке А.7;
- момент инерции сечения рамы вдоль оси Y [см. рисунок А.5 a)];
- среднее расстояние между ребрами жесткости рамы [см. рисунок А.5 b)].
|
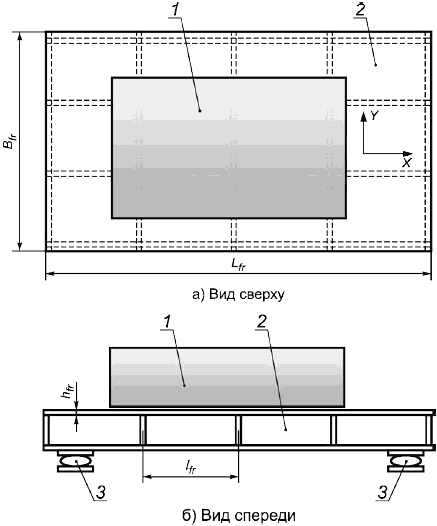
1 - машина; 2 - рама; 3 - изолятор; - длина рамы;
- ширина рамы;
- расстояние между ребрами жесткости;
- толщина пластины рамы
Рисунок А.5 - Схематическое изображение нагруженной рамы
|
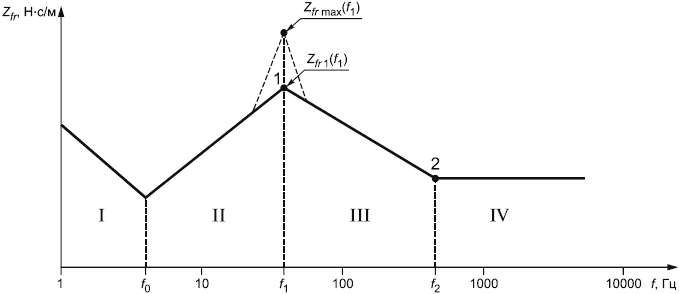
Рисунок А.6 - Типичная огибающая входных импедансов нагруженной рамы
|
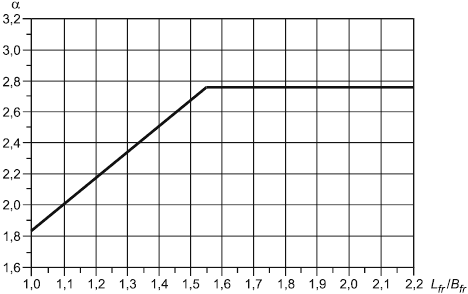
Рисунок А.7 - Зависимость коэффициента от соотношения размеров рамы
В окрестности частоты антирезонанса (приблизительно между 0,7
и 1,3
) огибающая лежит выше кривой, определенной формулами (А.9) и (А.10) и достигает пикового значения
![]() (см. рисунок А.6), которое может быть оценено по формуле
(см. рисунок А.6), которое может быть оценено по формуле
![]() . (А.14)
. (А.14)
Входной импеданс ненагруженной свободно подвешенной рамы также может быть оценен с помощью огибающей, показанной на рисунке А.6, однако в этом случае собственная частота будет ниже 1 Гц, поэтому на графике будет отсутствовать первый участок кривой, соответствующий диапазону частот I.
А.5 Фундаментная плита машины
Максимально возможные значения входных импедансов стальной фундаментной плиты, расположенной между жестко установленной машиной и тяжелым неподвижным фундаментом здания или транспортного средства (см. рисунок А.8), можно оценить с помощью графика в логарифмическом масштабе по обеим осям, изображенного на рисунке А.9.
Огибающую входных импедансов на частотах выше 50 Гц можно определить по формуле
 (А.15)
(А.15)
где - частота;
- толщина фундаментной плиты;
- модуль Юнга материала плиты;
- плотность материала плиты;
- частота перехода, которую можно рассчитать по приближенной формуле
![]() , (А.16)
, (А.16)
где - среднее расстояние между ребрами жесткости фундаментной плиты [см. рисунок А.8 b)].
|
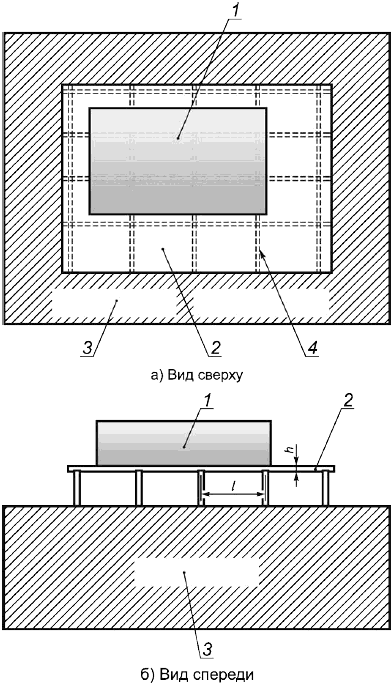
1 - машина; 2 - фундаментная плита; 3 - тяжелый фундамент; 4 - ребро жесткости; - расстояние между ребрами жесткости;
- толщина фундаментной плиты
Рисунок А.8 - Схематическое изображение нагруженной фундаментной плиты
|
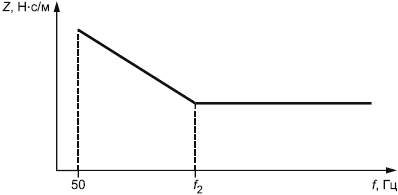
Рисунок А.9 - Типичная огибающая входных импедансов фундаментной плиты
Приложение Б
(справочное)
Примеры выбора испытательного оборудования
Б.1 Испытания рамной конструкции
Б.1.1 Общие сведения
Испытания для определения резонансных характеристик опорной конструкции (рамы) судового движителя проводят в натурных условиях с целью отстройки резонансной частоты конструкции от частот, возбуждаемых судовым оборудованием в диапазоне от 20 до 200 Гц. Вынуждающую силу прикладывают в заданных точках конструкции в разных направлениях возбуждения. Как это часто имеет место в условиях натурных испытаний, доступ к точкам возбуждения затруднен.
Б.1.2 Особенности объекта испытаний
Испытуемая конструкция имеет следующие характеристики:
- масса рамы, =17000 кг;
- общая статическая жесткость изоляторов рамы, =1,76·10
Н/м;
- толщина фундаментной плиты, =0,04 м;
- среднее расстояние между ребрами жесткости, =0,6 м;
- момент инерции сечения рамы вдоль оси ее максимального размера, ,
=1,31·10
м
;
- модуль Юнга материала рамы, =2,11·10
Н/м
;
- ширина рамы, =1,95 м;
- длина рамы, =10 м;
- плотность материала рамы =7,85·10
кг/м
.
Известно также, что фоновая вибрация стационарна и равномерно распределена в диапазоне частот от 20 до 200 Гц со среднеквадратичным значением ускорения =0,03 м/с
.
Б.1.3 Выбор вибровозбудителя
Б.1.3.1 Диапазон частот
Диапазон частот испытаний не очень широк и может быть обеспечен всеми типами вибровозбудителей, рассмотренными в разделе 5.
Б.1.3.2 Сопряжение с испытуемой конструкцией
Условия испытаний исключают применение вибровозбудителей механического и гидравлического типов вследствие их больших размеров, а также сложностей быстрого соединения исполнительного устройства с испытуемой конструкцией, особенно в условиях ограниченного пространства.
Б.1.3.3 Требования к создаваемому перемещению
При среднеквадратичном значении ускорения =0,03 м/с
фоновой вибрации в диапазоне частот от 20 до 200 Гц и разрешении по частоте
![]() Гц уровень (среднеквадратичное значение) каждой спектральной составляющей фоновой вибрации составит 2,24·10
Гц уровень (среднеквадратичное значение) каждой спектральной составляющей фоновой вибрации составит 2,24·10 м/с
. Чтобы превысить уровень фоновой вибрации на нижней границе диапазона частот в десять раз, необходимо развить ускорение
=0,02236 м/с
. Это соответствует перемещению около 1,4 мкм, что исключает применение вибровозбудителей пьезоэлектрического типа, для которых уровень создаваемого перемещения, как правило, ниже. Кроме того, для эффективной работы пьезоэлектрического вибровозбудителя требуется жесткий упор, что также трудно реализовать в условиях натурных испытаний.
Б.1.3.4 Требования к вынуждающей силе
Как следует из В.1.3.3, вибровозбудитель должен обеспечивать ускорение =0,02236 м/с
во всем диапазоне частот испытаний. По формулам (А.11)-(А.13) раздела А.4 могут быть определены частоты перехода:
![]() Гц;
Гц;
 Гц (где
Гц (где =2,76, см. рисунок А.7);
 Гц.
Гц.
Поскольку верхняя граница диапазона частот испытаний (200 Гц) превышает 0,7, этот диапазон включает в себя область антирезонанса, где входной импеданс может достигать пикового значения
![]() (см. рисунок А.6). Подставляя частоту антирезонанса
(см. рисунок А.6). Подставляя частоту антирезонанса в формулу (А.14), получаем
![]() .
.
Таким образом, выбранный вибровозбудитель должен обладать способностью производить силу
![]() .
.
Б.1.3.5 Заключение
Требуемые силы могут развивать вибровозбудители электродинамического и пьезомагнитного типов. Их применение позволяет без затруднений провести подготовку к испытаниям и их выполнение.
Если уровень помех в измерительном канале составляет 10 мкВ, то сигнал на выходе акселерометра должен превышать 0,1 мВ. С учетом требования к вибровозбудителю создавать ускорение =0,02236 м/с
, коэффициент преобразования акселерометра должен быть не меньше
![]() мВ·с
мВ·с/м.
Б.2 Испытания резино-металлической опоры
Б.2.1 Общие сведения
Испытания проводят в условиях лаборатории для определения входного и переходного механических импедансов холостого хода резинометаллического амортизатора в диапазоне частот от 5 до 2000 Гц одним из методов, рассмотренных в [1], [2] или [4]. Возбуждение подают на входной фланец амортизатора. Ускорение вибрации измеряют на входном и выходном фланцах.
Б.2.2 Особенности объекта испытаний
Испытуемая конструкция и измерительная цепь имеют следующие характеристики:
- статическая жесткость (предварительная оценка), =5·10
Н/м;
- электрический шум в канале измерения достигает 10 мкВ;
- коэффициент преобразования акселерометра, =1·10
мВ·с
/м.
Также известно, что резинометаллический изолятор сохраняет линейное поведение в широком диапазоне амплитуд, и его динамические свойства слабо зависят от приложенной нагрузки. Фоновую вибрацию в условиях лабораторных испытаний можно считать пренебрежимо малой. Это позволяет проводить испытания без предварительного статического нагружения, возбуждая вибрацию относительно низкого уровня. Однако лабораторные испытания, как правило, налагают жесткие ограничения на колебания в направлении, поперечном оси возбуждения.
Б.2.3 Выбор вибровозбудителя
Б.2.3.1 Диапазон частот
Возбуждение в заданном диапазоне частот может быть обеспечено электродинамическим или пьезоэлектрическим вибровозбудителем, а также с помощью измерительного молотка.
Б.1.3.2 Дополнительные ограничения
Измерительный молоток не удовлетворяет жестким требованиям к направленности и месту приложения возбуждения, что исключает его из дальнейшего рассмотрения.
Б.2.3.3 Требования к вынуждающей силе
Оценка требуемой силы может быть получена из ускорения на входе измерительной цепи, которое должно превышать шум в цепи в десять раз. При заданном коэффициенте преобразования акселерометра =1·10
мВ·с
/м, выходной сигнал акселерометра должен составлять 0,1 мВ, что соответствует входному ускорению 0,1 м/с
. Это, в свою очередь, соответствует перемещению около 10
м на нижней границе диапазона частот испытаний (5 Гц). При заданной статической жесткости
=5·10
Н/м для создания такого перемещения потребуется сила около 500 Н.
Б.2.3.4 Заключение
Испытания могут быть выполнены с применением следующего испытательного оборудования:
- электродинамического вибровозбудителя, способного развивать силу 500 Н, с мягкой мембраной, подвешиваемого на упругом подвесе над испытуемым изолятором. Такой подвес позволит контролировать поперечные и крутильные колебания подвижного элемента виброизолятора в заданном широком диапазоне частот;
- пьезоэлектрического вибровозбудителя, помещенного последовательно с испытуемым изолятором между двумя неподвижными ограничивающими поверхностями.
Библиография
[1] | Попков В.И., Попков С.В. Колебания механизмов и конструкций. - СПб.: Сударыня, 2009. - 490 с. |
УДК 534.322.3.08:006.354 | ОКС 17.160 |
Ключевые слова: вибрационные испытания, вибрационная установка, динамические характеристики конструкций, выбор испытательного оборудования | |
Электронный текст документа
и сверен по:
, 2019
{kind=link}