ГОСТ Р ИСО 16063-13-2012
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Вибрация
МЕТОДЫ КАЛИБРОВКИ ДАТЧИКОВ ВИБРАЦИИ И УДАРА
Часть 13
Первичная ударная калибровка методами лазерной интерферометрии
Mechanical vibration. Methods for the calibration of vibration and shock transducers. Part 13. Primary shock calibration using laser interferometry
ОКС 17.160
Дата введения 2013-12-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным унитарным предприятием Всероссийский научно-исследовательский институт метрологической службы (ФГУП ВНИИМС) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4, с участием Автономной некоммерческой организации "Научно-исследовательский центр контроля и диагностики технических систем" (АНО "НИЦ КД")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 183 "Вибрация, удар и контроль технического состояния"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 29 ноября 2012 г. N 1379-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 16063-13:2001* "Методы калибровки датчиков вибрации и удара. Часть 13. Первичная ударная калибровка методами лазерной интерферометрии" (ISO 16063-13:2001 "Methods for the calibration of vibration and shock transducers - Part 13: Primary shock calibration using laser interferometry", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с требованиями ГОСТ Р 1.5-2012 (пункт 3.5).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные и межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
6 ПЕРЕИЗДАНИЕ. Март 2019 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
1 Область применения
Настоящий стандарт устанавливает требования к аппаратуре и метод, используемый для первичной ударной калибровки акселерометров прямолинейного движения с применением лазерной интерферометрии для определения перемещения во времени при ударе. Метод применяют для ударов длительностью от 0,05 мс до 10 мс и в диапазоне от 10 до 10
м/с
(в зависимости от длительности удара). Метод позволяет определить коэффициент преобразования по удару.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ISO 5347-22:1997, Methods for the calibration of vibration and shock pick-ups - Part 22: Accelerometer resonance testing - General methods (Методы калибровки датчиков вибрации и удара. Часть 22. Испытание акселерометра на резонанс. Общие методы)
ISO 16063-1:1998, Methods for the calibration of vibration and shock transducers - Part 1: Basic concepts (Методы калибровки датчиков вибрации и удара. Часть 1. Основные положения)
ISO 16063-11:1999, Methods for the calibration of vibration and shock transducers - Part 11: Primary vibration calibration by laser interferometry (Методы калибровки датчиков вибрации и удара. Часть 11. Первичная вибрационная калибровка методами лазерной интерферометрии)
3 Неопределенность измерения
Применение методов, установленных настоящим стандартом, должно обеспечивать неопределенность измерения, не превышающую следующие значения:
- 1% измеренного значения при опорном пиковом значении 1000 м/с, опорной длительности удара 2 мс и опорном коэффициенте усиления усилителя;
- 2% для произвольных пиковых значений ускорения и длительностей импульсов.
Указанная неопределенность установлена для калибровки преобразователей повышенной точности (например, эталонных акселерометров) при условии, что применены все необходимые меры для снижения составляющих неопределенности с целью соответствия установленным требованиям к бюджету неопределенности (см. приложение А). В частности, энергия, связанная с возбуждением резонанса какой-либо части преобразователя или ударного стенда в процессе калибровки, должна быть мала по сравнению с энергией в диапазоне частот калибровки. Эксперимент по определению резонанса датчика должен выполняться в соответствии с ИСО 5347-22. Выполнение данного требования может потребовать отказаться от использования импульсов с относительно короткими длительностями, указанными в разделах 1 и 6.
Пользователи настоящего стандарта должны самостоятельно составлять бюджет неопределенности в соответствии с приложением А, отражающий конкретные условия калибровки.
Примечание - В настоящем стандарте под неопределенностью измерения понимается расширенная неопределенность в соответствии с ИСО 16063-1.
4 Требования к испытательному оборудованию и средствам измерений
4.1 Общие положения
В настоящем разделе установлены требования, соответствие которым необходимо для достижения целей калибровки, указанных в разделе 1, с неопределенностью, указанной в разделе 3.
4.2 Ударный стенд с наковальней
В ударном стенде данного типа возбуждение осуществляется ударом молотка (снаряда) о наковальню (мишень), на которой закреплен акселерометр. После соударения молоток захватывается улавливающим устройством, а переданный им импульс позволяет наковальне совершать свободное прямолинейное движение с ускорением. Между молотком и наковальней размещают стальные пружины или амортизирующие прокладки из резины, бумаги или другого подходящего материала, позволяющие сформировать ударный импульс необходимой формы и длительности. Полученные импульсы ускорения должны быть близки к одной из классических форм: полусинусоиды, квадрата полусинусоиды (версинусоидальный импульс) или гауссовской (колоколообразный импульс). Резонансные частоты молотка и наковальни должны быть не менее 10/, где
- длительность импульса.
Во избежание влияния резонансов конструкции ударного стенда молоток и наковальня должны быть максимально от нее изолированы. Продольные оси молотка и наковальни должны совпадать с предельно допустимым смещением между ними, ±0,2 мм. Конструкция опоры наковальни должна обеспечивать отсутствие несимметричных сил, вызывающих вращение и отклонение от прямолинейного движения.
Шероховатость монтажной поверхности наковальни (среднее арифметическое отклонение профиля), на которой закреплен акселерометр, должна быть менее 1 мкм.
Отклонение от плоскостности монтажной поверхности должно быть не более 5 мкм.
Отклонение от перпендикулярности продольной оси резьбового отверстия для монтажа акселерометра должно быть не более 10 мкм на интервале, равному глубине отверстия.
Примечание 1 - Для выполнения указанных требований наковальня и молоток могут быть снабжены воздушными подшипниками (см. рисунок 1 и [1]). Ударный стенд, показанный на рисунке 1, воспроизводит версинусоидальный импульс ускорения [6].
Примечание 2 - Некоторые традиционные ударные стенды, используемые при калибровке методом сравнения (см. [2] и [3]), не способны создавать движение, которое может быть измерено с требуемой точностью методами лазерной интерферометрии.
|
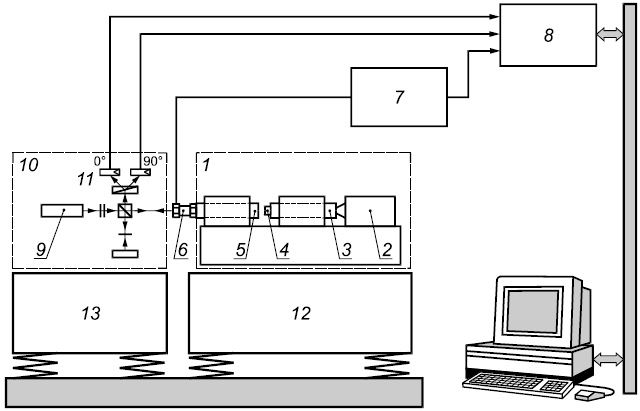
1 - ударный стенд (см. 4.2); 2 - пружинный элемент; 3 - молоток на воздушной опоре; 4 - прокладка; 5 - наковальня (например, из стали диаметром 30 мм и длиной 200 мм) на воздушной опоре; 6 - акселерометр; 7 - усилитель; 8 - цифровой регистратор формы сигнала (см. 4.8); 9 - лазер (см. 4.5); 10 - интерферометр (см. 4.6); 11 - фотодетектор (см. 4.6); 12 - первый сейсмический блок (см. 4.4); 13 - второй сейсмический блок (см. 4.4)
Рисунок 1 - Пример измерительной системы для ударной калибровки с использованием наковальни
4.3 Ударный стенд с длинным тонким стержнем, по которому распространяется ударный импульс
В ударном стенде данного типа движущееся с ускорением тело (например, стальной шар) соударяется с амортизирующим элементом (например, стальным шаром такого же диаметра), прикрепленным к стержню, на противоположном конце которого закреплен акселерометр. Стержень должен иметь упругую подвеску, позволяющую избежать влияния резонансов ударного стенда. Соосность молотка и стержня должна находиться в пределах, обеспечивающих выполнение требований к неопределенности измерения (раздел 3).
Любые отклонения от прямолинейного движения монтажной поверхности акселерометра должны быть малы по крайней мере в течение периода измерения (не более 1 мс), чтобы обеспечить соответствие требованиям к неопределенности измерения. Поэтому ударный стенд должен иметь устройство автоматического управления процессом записи данных.
Шероховатость поверхности , на которой закреплен акселерометр, должна быть менее 1 мкм.
Отклонение от плоскостности монтажной поверхности должно быть не более 5 мкм.
Отклонение от перпендикулярности продольной оси резьбового отверстия для монтажа акселерометра должно быть не более 10 мкм на интервале, равному глубине отверстия.
При определении размера стержня ([4], [5]) следует учитывать, что на его торцовой поверхности должно быть место для крепления калибруемого акселерометра, а также для отражения лазерного луча интерферометра, воспринимающего движение этой поверхности. Кроме того, период измерения (см. ниже) должен быть достаточным.
Максимальная продолжительность удара и период измерения, необходимый для сбора данных, ограничены моментом отражения ударного импульса от монтажной поверхности (например, 0,8 мс для стержня длиной 2 м, см. рисунок 2).
|
________________
К вакуумному насосу.
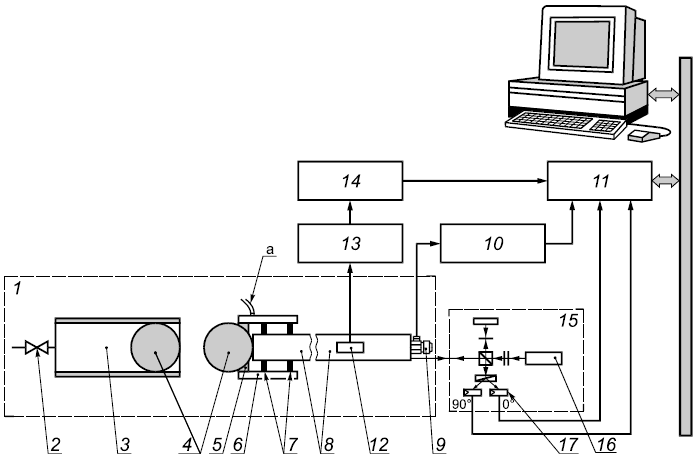
1 - ударный стенд (см. 4.3); 2 - насос (сжатый воздух); 3 - воздушный цилиндр; 4 - два шара диаметром 50 мм; 5 - силиконовый каучук; 6 - алюминиевая труба; 7 - кольцо; 8 - стержень из титана диаметром 25 мм длиной 2000 мм; 9 - акселерометр; 10 - усилитель; 11 - цифровой регистратор формы сигнала (см. 4.8); 12 - измеритель механического напряжения; 13 - мостовой усилитель; 14 - триггер; 15 - интерферометр (см. 4.6); 16 - лазер (см. 4.5); 17 - фотодетектор (см. 4.6)
Рисунок 2 - Пример измерительной системы для ударной калибровки с использованием длинного тонкого стержня (диапазон пикового значения ускорения от 1000 до 10000 м/с)
Пример ударного стенда, принцип действия которого основан на упругом распространении волны по длинному тонкому стержню, показан на рисунке 2. Для формирования сигналов о начале и окончании периода измерения используются два тензодатчика на противоположных сторонах стержня. Ударный стенд с двумя стальными шарами, показанный на рисунке 2, обеспечивает воспроизведение ускорения в форме производной гауссовского импульса, что соответствует гауссовскому импульсу скорости [6]. Данный стенд обеспечивает хорошую повторяемость результатов при повторных ударных калибровках и относительно малые изменения соотношения частотных составляющих спектра при различных пиковых значениях удара [13].
Применительно к разным условиям калибровки могут использоваться стержни других размеров, чем показаны на рисунке 2.
В общем случае продольное перемещение в стержне описывается сложной функцией радиальной координаты и частоты, зависящей от свойств материала и диаметра стержня. Это может приводить к зависящей от частоты деформации основания калибруемого акселерометра и увеличению неопределенности измерения.
4.4 Сейсмический блок (блоки) для ударного стенда и лазерного интерферометра
Ударный стенд и интерферометр устанавливают на общем или на отдельных массивных блоках с целью предотвратить их относительное перемещение из-за колебаний грунта, а также для предотвращения чрезмерного влияния реакции опоры ударного стенда на результаты калибровки.
4.5 Лазер
Для калибровки используют красный гелий-неоновый лазер.
В лабораторных условиях (при атмосферном давлении 100 кПа, температуре 23°С и относительной влажности 50%) номинальная длина волны лазера равна 0,63281 мкм.
Если лазер имеет ручную или автоматическую компенсацию влияния условий окружающей среды, то она должна быть установлена на нуль или отключена.
Допускается использовать одночастотный лазер с другой стабильной и известной длиной волны.
4.6 Интерферометр
Для приема интерференционного сигнала применяют модифицированный интерферометр Майкельсона, выходные сигналы которого сдвинуты друг относительно друга на 90° (квадратурные сигналы), с двумя фотодетекторами, имеющими частотную характеристику, перекрывающую необходимую ширину полосы частот.
Необходимая ширина полосы частот , Гц, может быть вычислена по амплитуде измеряемой скорости
, м/с, по формуле
![]() .
.
Модифицированный интерферометр Майкельсона может быть собран в соответствии со схемой, показанной на рисунке 3. Четвертьволновая пластина преобразует падающий линейно поляризованный свет в два измерительных луча со взаимно ортогональной поляризацией и фазовым сдвигом 90°. После интерференции с линейно поляризованным опорным лучом две компоненты со взаимно ортогональными поляризациями пространственно разделяют при помощи соответствующих оптических элементов (например, призмы Волластона или поляризационного светоделителя) и детектируют двумя фотодиодами. Два выходных сигнала модифицированного интерферометра Майкельсона должны иметь сдвиг нуля не более ±5% амплитуды сигнала, относительную разность амплитуд менее ±5% и отклонение разности фаз от номинального угла 90° не более ±5°. Чтобы удовлетворить этим требованиям, должны быть предусмотрены средства регулировки нуля, амплитуды сигнала и сдвига фаз между двумя сигналами интерферометра.
|
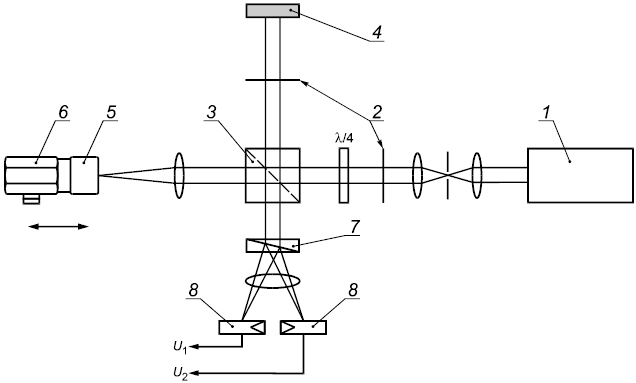
1 - лазер; 2 - поляризаторы; 3 - светоделитель; 4 - опорное зеркало; 5 - имитирующая масса (измерительный отражатель); 6 - акселерометр; 7 - призма Волластона; 8 - фотодетекторы
Рисунок 3 - Лазерный интерферометр с квадратурным выходом
Для соблюдения требований к неопределенности измерения, указанных в разделе 3, направление измерительного луча интерферометра должно совпадать с осью стержня.
При калибровке акселерометра с одной монтажной поверхностью для отражения измерительного луча необходимо использовать полированную торцевую поверхность стержня, а при калибровке акселерометра, в конструкции которого имеется две монтажные поверхности (что допускает его крепление с другим акселерометром в положении "спина к спине"), - полированную поверхность акселерометра. Использование зеркал не допускается.
При больших пиковых значениях ускорения необходима широкая полоса пропускания. Например, для удара с пиковым значением ускорения 100000 м/с и длительностью 200 мкс (при форме импульса, указанной в 4.3) верхняя граница частотного спектра передаваемого сигнала интерферометра составляет 32 МГц (см. [6]).
Вместо интерферометра Майкельсона (модифицированного) может быть использован другой подходящий двухлучевой интерферометр, например интерферометр Маха-Цендера (модифицированный).
4.7 Осциллограф
Если осциллограф не входит в состав регистратора формы сигнала (см. 4.8), то он должен быть использован в качестве отдельного устройства для контроля формы сигналов интерферометра и акселерометра в диапазоне частот от 0 до 50 МГц и выше.
4.8 Регистратор формы сигнала с компьютерным интерфейсом
Измерительная система должна иметь в своем составе регистратор формы сигнала с компьютерным интерфейсом, позволяющим выполнять аналого-цифровое преобразование и хранить в памяти два квадратурных выходных сигнала интерферометра и выходной сигнал акселерометра. Разрешающая способность по амплитуде, частота выборки и объем памяти должны быть достаточными для калибровки в требуемом динамическом диапазоне с неопределенностью, указанной в разделе 3. Обычно для выходного сигнала акселерометра достаточно разрядности аналого-цифрового преобразования 10 бит, а для выходных квадратурных сигналов интерферометра - 8 бит. Допускается использование двух регистрирующих устройств: двухканального для выходных сигналов интерферометра и устройства с более высокой разрешающей способностью и более низкой частотой выборки для выходного сигнала акселерометра.
Пример - Для калибровки акселерометра при пиковом значении ускорения 2500 м/с и длительности импульса 2 мс частота выборки должна быть 50 МГц или выше (памяти 1 Мбит достаточно для записи сигналов трех каналов).
4.9 Компьютер с программной обработкой данных
Компьютер с программой обработки данных используют при расчетах по 7.3.
4.10 Фильтры
Аналоговые фильтры, используемые для выходных сигналов акселерометра и интерферометра для подавления шума, а также с целью избежать наложения спектров, должны иметь амплитудно- и фазочастотные характеристики, позволяющие удовлетворить требованиям к неопределенности измерения (раздел 3). Это относится также к цифровым фильтрам, используемым в процессе обработки данных (см. 7.3).
При фильтрации сигналов интерферометра необходимо принимать во внимание возможные источники погрешности, указанные в [6].
4.11 Другие требования
Для достижения достаточно малой неопределенности измерения (например, не более 1%) рекомендуется акселерометр и усилитель акселерометра рассматривать как единое устройство и калибровать их совместно.
Конструкция акселерометра должна быть жесткой. При расчете неопределенности измерения (см. приложение А) должны быть приняты во внимание чувствительность акселерометра к деформации основания, коэффициент поперечного преобразования и стабильность характеристик системы "акселерометр-усилитель".
При калибровке эталонного акселерометра, который впоследствии предполагают применять для калибровки методом сравнения в положении "спина к спине", измерение коэффициента преобразования (как модуля, так и фазового сдвига) следует проводить с использованием имитатора, масса которого равна массе акселерометра, калибруемого методом сравнения. Луч лазера должен падать на верхнюю поверхность имитатора (внешняя поверхность) или на верхнюю поверхность калибруемого акселерометра.
Если измеряют ускорение верхней поверхности имитатора, то она должна быть отполирована, и пятно лазерного луча должно находиться вблизи геометрического центра этой поверхности. В случаях, когда имитатор нельзя считать абсолютно твердым телом, следует учитывать относительное движение верхней и нижней поверхностей имитатора.
В качестве альтернативы можно измерять ускорение верхней поверхности опорного акселерометра через продольное отверстие в имитаторе массы.
В некоторых ударных стендах, применяемых для ударной калибровки методом сравнения, измеряют ускорение калибруемого акселерометра относительно монтажной поверхности эталонного акселерометра, на которой калибруемый акселерометр установлен. При этом оба акселерометра смонтированы на жесткой конструкции. В этом случае при калибровке эталонного акселерометра ударное ускорение необходимо измерять на близкой к акселерометру движущейся части ударного стенда (например, на торцевой поверхности стержня).
5 Нормальные условия окружающей среды
Калибровку проводят при следующих условиях окружающей среды:
a) комнатная температура (23±3)°С;
b) относительная влажность не более 75%.
6 Предпочтительные значения опорного ускорения и длительности импульса
Предпочтительные значения (пиковые) опорного ускорения и длительности импульса выбирают из следующих рядов:
a) ускорение, м/с: 100; 200; 500; 1000; 2000; 5000; 10000; 20000; 50000; 100000,
b) длительность ударного импульса, мс: 0,05; 0,1; 0,2; 0,5; 1; 2; 5; 10.
Предупреждение - Во избежание повреждения акселерометра длительность калибровочного ударного импульса не должна превышать указанной изготовителем минимальной длительности импульса.
7 Описание метода
7.1 Процедура
Измерительная система должна быть собрана в соответствии с рисунком 1 или 2, а также рисунком 3. Лазерный интерферометр (например, показанный на рисунке 3) должен быть отъюстирован для получения выходных сигналов и
с фазой квадратурного сигнала в пределах допускаемых значений, указанных в 4.6. Перед воспроизведением удара необходимо измерить помехи (шум), которые должны быть малыми настолько, чтобы обеспечить требования к неопределенности измерения.
После того как отрегулировано положение элементов интерферометра (см. 4.6) и выбрано требуемое положение переключателя диапазона усилителя, выполняют калибровку акселерометра при заданных опорных ускорениях и длительностях импульса (см. раздел 4), как описано в 7.2 и 7.3.
Примечание 1 - Применение цифрового сигнального процессора совместно со специальным гетеродинным интерферометром, как указано в [7] и [8], позволяет получить квадратурные сигналы без искажений, допуски на которые установлены в 4.6. В этом случае может быть достигнута меньшая неопределенность измерения по сравнению с методом, установленным настоящим стандартом. Соответствующая гетеродинная техника имеет также преимущества в передаче фотоэлектрических интерференционных сигналов с широкой полосой частот (см. 4.6), но ее недостатком является значительно более высокая стоимость.
Примечание 2 - При измерении сигнала ускорения вместо метода, основанного на формировании квадратурных сигналов, можно использовать одноканальный интерферометр Майкельсона, измеритель временных интервалов и специальные алгоритмы для определения ускорения по значениям перемещения в фиксированные моменты времени (см. [9]).
7.2 Сбор данных
Частоты среза низкочастотного фильтра и высокочастотного фильтра (если он используется) должны быть выбраны такими, чтобы влияние помех на отфильтрованный сигнал было в пределах допускаемых значений (см. [6]). В соответствии с теоремой Найквиста-Котельникова частота выборки должна не менее чем вдвое превышать максимальную частоту измеряемого сигнала.
Выборочные значения квадратурных сигналов должны быть эквидистантны в пределах периода измерения ![]() , где
, где - время начала, а
![]() - время конца сбора данных.
- время конца сбора данных.
Начальный момент измерений должен предшествовать началу ударного импульса, воздействующему на монтажную поверхность акселерометра (рекомендуемый сдвиг по времени 0,1 , где
- длительность импульса). Заканчиваться период измерения должен до прихода отраженного импульса (рекомендуемый сдвиг по времени 0,05
).
При формировании выборки квадратурных сигналов ![]() и
и ![]() на периоде измерения
на периоде измерения ![]() период дискретизации должен быть
период дискретизации должен быть ![]() .
.
Одновременно формируют выборку выходного сигнала акселерометра ![]() .
.
Собранные данные должны быть переданы в память компьютера.
7.3 Обработка данных
7.3.1 Общие положения
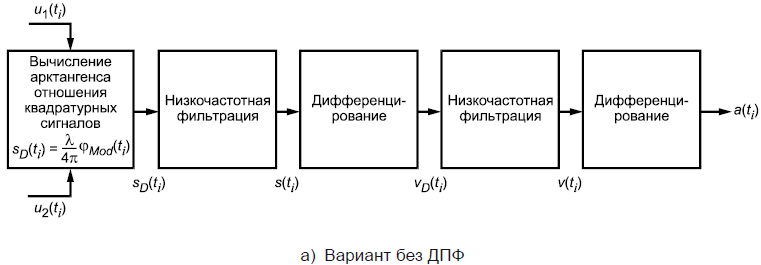
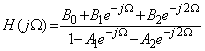
Примеры методов обработки данных с целью вычисления коэффициента преобразования по удару (отношение пикового значения выходного сигнала акселерометра к пиковому значению ускорения) показаны на рисунке 4 в трех возможных вариантах с использованием или без использования дискретного преобразования Фурье (ДПФ):
a) без ДПФ;
b) с ДПФ сигнала скорости;
c) с ДПФ сигнала перемещения.
|
|
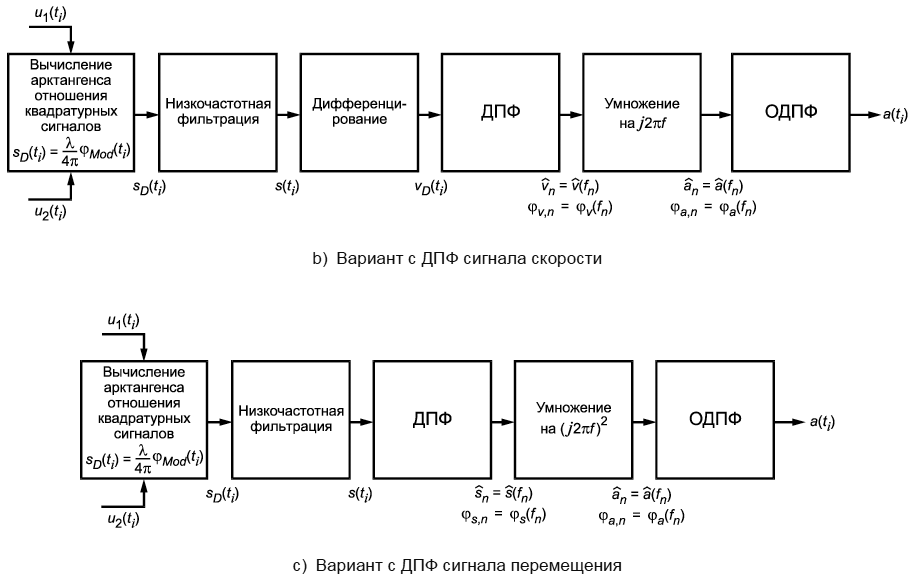
Рисунок 4 - Блок-схема обработки сигнала для получения коэффициента преобразования по удару
Для вариантов a) и b) бльшая часть вычислений является общей, и отличаются они только тем, что дифференцирование сигнала скорости [выборка
] для получения сигнала ускорения [выборка
] выполняется во временной или частотной области. В последнем случае используется дискретное преобразование Фурье и обратное дискретное преобразование Фурье (ОДПФ), а получаемые промежуточные результаты вычислений могут быть использованы для определения модуля и фазового сдвига коэффициента преобразования акселерометра (приложение С). В варианте c) осуществляется двойное дифференцирование в частотной области, что позволяет по выборке перемещения
получить выборку ускорения
.
Вариант без ДПФ применяется при ударных импульсах большой длительности для ![]() 0,5 м/с в случае формы импульса ускорения в виде квадрата полусинусоиды (см. 4.2) и
0,5 м/с в случае формы импульса ускорения в виде квадрата полусинусоиды (см. 4.2) и ![]() 1,5 м/с в случае гауссовской формы импульса скорости (см. 4.3), где
1,5 м/с в случае гауссовской формы импульса скорости (см. 4.3), где - длительность импульса в секундах;
- пиковое значение ускорения в метрах на секунду в квадрате. Для более коротких импульсов должны быть использованы варианты обработки с ДПФ сигналов скорости или перемещения. Эти варианты применимы также для ударов с большой длительностью импульса и могут оказаться более предпочтительными в случае необходимости подавления высокочастотных помех от вибрации, если таковые имеются. Если скорость движения поверхности, на которой установлен акселерометр, до и после ударного импульса не равна нулю, то применяют специальную процедуру обработки данных (сдвиг сигнала), позволяющую корректно использовать преобразование Фурье.
Примечание 1 - Соотношения и определения, связанные с длительностью ударного импульса, поясняются в [6]. Для гауссовской формы импульса скорости за его длительность принимают период времени, на котором значение сигнала превышает 0,606.
Примечание 2 - Приведенные выше соотношения для длительности ударного импульса даны с учетом искажений квадратурного сигнала в пределах допусков, указанных в 4.6 [6].
Примечание 3 - Произведение ![]() приблизительно равно пиковому значению скорости. Мгновенная частота выходного сигнала интерферометра пропорциональна скорости. При выполнении неравенств, приведенных в настоящем пункте, с помощью низкочастотной фильтрации выходного сигнала интерферометра можно добиться соотношения сигнал/шум, позволяющего удовлетворить требования к неопределенности измерения (раздел 3).
приблизительно равно пиковому значению скорости. Мгновенная частота выходного сигнала интерферометра пропорциональна скорости. При выполнении неравенств, приведенных в настоящем пункте, с помощью низкочастотной фильтрации выходного сигнала интерферометра можно добиться соотношения сигнал/шум, позволяющего удовлетворить требования к неопределенности измерения (раздел 3).
7.3.2 Вычисление коэффициента преобразования без применения ДПФ
Коэффициент преобразования по удару вычисляют, обрабатывая данные в следующей последовательности (см. рисунок 4а):
a) вычисляют последовательность значений сигнала фазовой модуляции ![]() по выборкам выходных сигналов интерферометра
по выборкам выходных сигналов интерферометра ![]() и
и ![]() по формуле
по формуле
![]() , (1)
, (1)
где =0, 1, 2...
Выбирают целое таким образом, чтобы избежать разрывов
![]() в точках
в точках .
Примечание - Процедура вычисления числа описана в (10).
Вычисляют последовательность значений перемещения ![]() по формуле
по формуле
![]() , (2)
, (2)
где подстрочный индекс означает, что значения искажены высокочастотными шумами;
b) преобразуют сигнал перемещения ![]() с помощью алгоритма цифровой низкочастотной фильтрации с параметрами, обеспечивающими подавление высокочастотного шума без искажения сигнала. Результатом фильтрации является ряд сглаженных значений перемещения, обозначаемых
с помощью алгоритма цифровой низкочастотной фильтрации с параметрами, обеспечивающими подавление высокочастотного шума без искажения сигнала. Результатом фильтрации является ряд сглаженных значений перемещения, обозначаемых ![]() .
.
Примечание - Подходящим фильтром для этой цели является фильтр, имеющий постоянную амплитудно-частотную характеристику (например, рекурсивный низкочастотный фильтр Баттерворта 4-го порядка). Для подавления высокочастотного шума частота среза фильтра не должна превышать 16/ для сигнала, имеющего форму квадрата синуса (см. 4.2), и 5/
для сигнала скорости гауссовой формы (см. 4.3). Вместе с тем, верхние границы фильтров не должны быть существенно меньше указанных значений, чтобы не допустить значительных искажений формы сигнала;
c) вычисляют первую производную перемещения по времени для получения выборки значений скорости ![]() .
.
Примечание - Первая производная по времени в момент может быть вычислена по формуле численного дифференцирования
![]() ; (3)
; (3)
d) преобразуют сигнал скорости ![]() с помощью алгоритма низкочастотной цифровой фильтрации с параметрами, обеспечивающими подавление высокочастотного шума без искажения сигнала. Результатом фильтрации является ряд сглаженных значений скорости, обозначаемых
с помощью алгоритма низкочастотной цифровой фильтрации с параметрами, обеспечивающими подавление высокочастотного шума без искажения сигнала. Результатом фильтрации является ряд сглаженных значений скорости, обозначаемых ![]() .
.
Примечание - См. примечание к этапу b);
e) вычисляют первую производную скорости по времени для получения ряда значений ускорения ![]() .
.
Примечание - Первая производная по времени в момент может быть вычислена по формуле
![]() ; (4)
; (4)
f) из ряда вычисленных значений ![]() выбирают максимальное значение
выбирают максимальное значение ![]() в качестве пикового значения
в качестве пикового значения ускорения;
g) преобразуют выходной сигнал акселерометра ![]() с помощью алгоритма низкочастотной цифровой фильтрации с параметрами, обеспечивающими подавление высокочастотного шума без искажений сигнала. Результатом фильтрации является ряд сглаженных значений, обозначаемых
с помощью алгоритма низкочастотной цифровой фильтрации с параметрами, обеспечивающими подавление высокочастотного шума без искажений сигнала. Результатом фильтрации является ряд сглаженных значений, обозначаемых ![]() .
.
Примечание - Подходящим фильтром для этой цели является фильтр, имеющий постоянную амплитудно-частотную характеристику (например, рекурсивный низкочастотный фильтр Баттерворта 4-го порядка);
h) из ряда вычисленных значений ![]() выходного сигнала акселерометра выбирают максимальное значение
выходного сигнала акселерометра выбирают максимальное значение ![]() в качестве пикового значения выходного сигнала акселерометра
в качестве пикового значения выходного сигнала акселерометра .
При наличии в сигнале сдвига нуля точку сигнала, соответствующую моменту времени непосредственно перед ударом, и точку сигнала со сдвинутым нулевым уровнем, соответствующую моменту времени сразу после удара, соединяют прямой линией, от которой отсчитывают значения выходного сигнала. Допустимым считают сдвиг нуля, не превышающий 1% пикового значения выходного сигнала. Если сдвиг нуля превышает указанное значение, то это должно быть принято во внимание при расчете неопределенности измерения, и значение сдвига должно быть отражено в протоколе калибровки;
i) вычисляют коэффициент преобразования по удару по значениям
и
, полученным на этапах h) и f), по формуле
 . (5)
. (5)
В протоколе калибровки должна быть указана расширенная неопределенность и значения, вычисленные в соответствии с приложением А.
7.3.3 Вычисление коэффициента преобразования по удару с применением ДПФ сигнала скорости
Коэффициент преобразования по удару вычисляют, обрабатывая данные в следующей последовательности [см. рисунок 4b]:
a) то же, что на этапе a) в 7.3.2;
b) то же, что на этапе b) в 7.3.2;
c) то же, что на этапе c) в 7.3.2;
d) вычисляют комплексный частотный спектр при помощи ДПФ ряда значений скорости ![]() , полученных на этапе c);
, полученных на этапе c);
e) умножают комплексный спектр скорости, полученный на этапе d), на комплексную угловую частоту для получения комплексного частотного спектра ускорения;
f) вычисляют ряд значений ускорения ![]() при помощи ОДПФ:
при помощи ОДПФ:
g) то же, что на этапе f) в 7.3.2;
h) то же, что на этапе g) в 7.3.2;
i) то же, что на этапе h) в 7.3.2;
j) то же, что на этапе i) в 7.3.2
7.3.4 Вычисление коэффициента преобразования по удару с применением ДПФ сигнала перемещения
Коэффициент преобразования по удару вычисляют, обрабатывая данные в следующей последовательности [см. рисунок 4c]:
a) то же, что на этапе a) в 7.3.2;
b) то же, что на этапе b) в 7.3.2;
c) вычисляют комплексный частотный спектр перемещения при помощи ДПФ ряда значений скорости ![]() , полученных на этапе b);
, полученных на этапе b);
d) умножают комплексный спектр скорости, полученный на этапе c), на квадрат комплексной угловой частоты ![]() для получения комплексного частотного спектра ускорения;
для получения комплексного частотного спектра ускорения;
e) то же, что на этапе f) в 7.3.2;
f) то же, что на этапе f) в 7.3.2;
g) то же, что на этапе g) в 7.3.2;
h) то же, что на этапе h) в 7.3.2;
i) то же, что на этапе i) в 7.3.2.
8 Представление результатов калибровки
В протоколе калибровки, кроме указания использованного метода калибровки, приводят следующую информацию:
a) условия окружающей среды:
- температура акселерометра,
- температура окружающего воздуха;
b) условия крепления акселерометра:
- материал поверхности, на которую устанавливают акселерометр,
- момент затяжки (если его устанавливают на шпильку),
- материал смазки, наносимой на монтажную поверхность (если такая использовалась),
- способ закрепления кабеля,
- ориентацию акселерометра;
c) сведения об имитаторе (если использовался):
- материал, из которого он изготовлен, размеры (длина, ширина), масса,
- момент затяжки при установке,
- значения корректирующего множителя для модуля коэффициента преобразования и коррекции по фазовому сдвигу, используемые для компенсации эффектов относительного движения верхней и нижней поверхности имитатора (при необходимости);
d) средства отражения луча лазера:
- используемый рефлектор (например, полированная поверхность стержня),
- положение лазерного пятна на отражающей поверхности;
e) настройки усилителя (если использовались), например:
- положение регулятора коэффициента усиления,
- значения частот среза фильтров;
f) результаты калибровки:
- пиковое значение и длительность удара,
- значение коэффициента преобразования по удару,
- расширенная неопределенность, коэффициент охвата (если его значение отлично от двух).
Приложение A
(обязательное)
Расчет неопределенности измерения при калибровке
A.1 Вычисление расширенной неопределенности ![]() коэффициента преобразования по удару
коэффициента преобразования по удару для заданных пиковых значений ускорения, длительности ударного импульса и настроек усилителя, при которых проводилась калибровка
Относительная расширенная неопределенность коэффициента преобразования по удару ![]() при заданном пиковом значении ускорения, длительности ударного импульса и настройках усилителя должна вычисляться в соответствии с ИСО 16063-1 по формулам:
при заданном пиковом значении ускорения, длительности ударного импульса и настройках усилителя должна вычисляться в соответствии с ИСО 16063-1 по формулам:
![]() ,
,

с коэффициентом охвата =2 (см. таблицу А.1).
Таблица А.1
Составляющая стандартной неопределенности | Источник неопределенности | Вклад в неопределенность | |
1 |
| Измерение выходного сигнала акселерометра (регистратор формы сигнала, например разрешение аналого-цифрового преобразователя) |
|
2 |
| Влияние фильтрации напряжения, соответствующего пиковому значению выходного сигнала акселерометра (ограничение полосы частот) |
|
3 |
| Влияние искажения напряжения, соответствующего пиковому значению выходного сигнала акселерометра (например, помеха и шум) |
|
4 |
| Влияние поперечного и углового ускорений на пиковое значение напряжения выходного сигнала акселерометра (поперечная чувствительность) |
|
5 |
| Влияние искажения квадратурного выходного сигнала интерферометра на пиковое значение ускорения (поперечная чувствительность) (например, сдвиги, девиация амплитуды напряжения, отклонение от номинального угла 90°) |
|
6 |
| Влияние фильтрации выходного сигнала интерферометра на пиковое значение ускорения (ограничение полосы частот) |
|
7 |
| Влияние искажения напряжения на пиковое значение ускорения (например, случайный шум в измерительной цепи фотодетектора) |
|
8 |
| Влияние искажения движения на пиковое значение ускорения (например, дрейф, относительное движение между опорной поверхностью акселерометра и пятном луча интерферометра) |
|
9 |
| Влияние искажений фазы на пиковое значение ускорения (например, фазовый шум сигнала интерферометра) |
|
10 |
| Остаточные интерферометрические влияния на пиковое значение ускорения |
|
11 |
| Остаточное влияние на измерение коэффициента преобразования по удару (влияние резонансного возбуждения в преобразователе или ударном стенде, случайные влияния при повторных измерениях; выборочное стандартное отклонение среднего арифметического значения) |
|
A.2 Вычисление расширенной неопределенности ![]() коэффициента преобразования
коэффициента преобразования для диапазона пиковых значений ускорения и длительности импульсов
Расширенная неопределенность коэффициента преобразования ![]() , вычисленная в соответствии с A.1, справедлива только для пиковых значений, длительностей импульса и настроек усилителя, использованных при калибровке. Относительная расширенная неопределенность коэффициента преобразования
, вычисленная в соответствии с A.1, справедлива только для пиковых значений, длительностей импульса и настроек усилителя, использованных при калибровке. Относительная расширенная неопределенность коэффициента преобразования ![]() для полного диапазона пиковых значений ускорений и длительности ударных импульсов в любое время в течение интервала между последовательными калибровками должна вычисляться в соответствии с ИСО 16063-1 по формулам:
для полного диапазона пиковых значений ускорений и длительности ударных импульсов в любое время в течение интервала между последовательными калибровками должна вычисляться в соответствии с ИСО 16063-1 по формулам:
![]() ,
,

с коэффициентом охвата =2 (см. таблицу А.2).
Таблица А.2
Составляющая стандартной неопределенности | Источник неопределенности | Вклад в неопределенность | |
1 |
| Неопределенность коэффициента преобразования по удару, вычисленная при опорных пиковых значениях, длительности ударного импульса и настройках усилителя в соответствии с А.1 |
|
2 |
| Изменение опорного значения коэффициента усиления (девиация коэффициента усиления и фазового сдвига для различных значений усиления) |
|
3 |
| Отклонение от постоянной амплитудно-частотной характеристики и линейной фазочастотной характеристики усилителя |
|
4 |
| Отклонение от постоянной амплитудно-частотной характеристики и линейной фазочастотной характеристики калибруемого акселерометра |
|
5 |
| Отклонение от линейности усилителя |
|
6 |
| Отклонение от линейности калибруемого акселерометра |
|
7 |
| Нестабильность значения коэффициента усиления усилителя и влияние импеданса источника на фазовый сдвиг |
|
8 |
| Нестабильность коэффициента преобразования (модуля и фазового сдвига) |
|
9 |
| Влияние условий внешней среды на коэффициент усиления и фазовый сдвиг усилителя |
|
10 |
| Влияние условий внешней среды на коэффициент преобразования (модуль и фазовый сдвиг) калибруемого акселерометра |
|
Приложение B
(справочное)
Теоретические основы метода
B.1 Общие положения
В соответствии с ИСО 16063-1 комплексный коэффициент преобразования по удару акселерометра определяют при гармоническом воздействии в направлении, параллельном заданной оси, в виде
![]() , (B.1)
, (B.1)
где
![]() ; (B.2)
; (B.2)
- модуль коэффициента преобразования по ускорению;
- амплитуда выходного гармонического сигнала акселерометра и (предпочтительно выходного сигнала напряжения системы "акселерометр-усилитель");
- амплитуда гармонического ускорения
;
- начальная фаза выходного сигнала акселерометра;
- начальная фаза ускорения;
![]() - фазовый сдвиг комплексного коэффициента преобразования,
- фазовый сдвиг комплексного коэффициента преобразования,
![]() . (B.3)
. (B.3)
Поскольку модуль и фазовый сдвиг комплексного коэффициента преобразования являются частотно зависимыми, они должны быть определены на всех заданных частотах.
Методы абсолютной калибровки акселерометров при гармоническом возбуждении описаны в ИСО 16063-11 и основаны на теории линейных систем. Согласно ей для калибровки с использованием ударного возбуждения могут быть применены разные способы определения модуля и фазового сдвига комплексного коэффициента преобразования. Если строгая линейность отклика акселерометра не соблюдается, то результаты ударной калибровки удара могут отличаться от результатов вибрационной калибровки. В соответствии с приложением C для определения модуля (см. B.2) и фазового сдвига (см. B.3) комплексного коэффициента преобразования на любой частоте может быть использовано преобразование Фурье входного и выходного сигнала акселерометра. По наблюдениям за влиянием пикового значения ускорения на модуль и сдвиг фазы
комплексного коэффициента преобразования на заданной частоте
могут быть установлены отклонения от линейности акселерометра (с усилителем заряда и без него).
В соответствии с областью применения (раздел 1) ударное возбуждение используется в настоящем стандарте для определения коэффициента преобразования акселерометра (с усилителем заряда и без него) как отношения пикового значения выходного сигнала к пиковому значению входного сигнала при определенных параметрах ускорения (пиковом значении, длительности импульса и его формы). В этом случае применяют формулу (B.2), где и
заменяют пиковыми значениями
и
, а коэффициент преобразования
рассчитывают по формуле
 . (B.4)
. (B.4)
Коэффициент преобразования будет зависеть от длительности ударного импульса, а если характеристика акселерометра нелинейна, то и от пикового значения.
При воспроизведении на ударном стенде ускорения на выходе акселерометра наблюдают сигнал
. Выходной сигнал первого фотодетектора может быть представлен формулой
![]() , (B.5)
, (B.5)
где фазовая модуляция
![]() (B.6)
(B.6)
является суммой начальной фазы сигнала фотодетектора и модулирующего члена
![]() , который пропорционален перемещению
, который пропорционален перемещению ,
![]() . (B.7)
. (B.7)
Здесь предполагается, что временная задержка между перемещением и
![]() отсутствует. По сигналу перемещения могут быть рассчитаны сигналы ускорения и скорости по формуле
отсутствует. По сигналу перемещения могут быть рассчитаны сигналы ускорения и скорости по формуле
![]() . (B.8)
. (B.8)
Выходной сигнал второго фотодетектора является квадратурным по отношению к первому и может быть представлен формулой
![]() , (B.9)
, (B.9)
где ![]() .
.
Выполняют выборку квадратурных сигналов ![]() и
и ![]() при постоянной частоте выборки
при постоянной частоте выборки в течение периода измерения
![]() с интервалом выборки
с интервалом выборки ![]() . Для обоих квадратурных сигналов значения последовательно вычисляют в течение периода измерений по формуле
. Для обоих квадратурных сигналов значения последовательно вычисляют в течение периода измерений по формуле
![]() , (B.10)
, (B.10)
где =0, 1, 2, 3...
Вычисление функции арктангенса, в частности, методом последовательного "развертывания фазы" (см. [10]) является стандартной процедурой программных комплексов цифровой обработки сигнала.
Используя ![]() , получаемую из формулы (B.9), можно вычислить ряд значений перемещения по формуле
, получаемую из формулы (B.9), можно вычислить ряд значений перемещения по формуле
![]() . (B.11)
. (B.11)
Если 0, то
![]() содержит сдвиг. Последующее дифференцирование по формуле (B.8) приводит к тому, что этот постоянный член не влияет на результаты вычисления скорости и ускорения. Подстрочный индекс
содержит сдвиг. Последующее дифференцирование по формуле (B.8) приводит к тому, что этот постоянный член не влияет на результаты вычисления скорости и ускорения. Подстрочный индекс означает, что полученные значения "размыты" высокочастотным шумом. Эти искажения подавляются цифровой низкочастотной фильтрацией. Методы определения модуля и фазового сдвига комплексного коэффициента преобразования (в частотной области) и коэффициента преобразования по удару (во временной области) показаны в B.2 и B.3.
B.2 Метод цифровой низкочастотной фильтрации
Для реализации процедуры низкочастотной фильтрации может быть использовано рекурсивное вычисление выходного сигнала в некоторый момент времени на основе предыдущих значений выходного сигнала
![]() ,
, ![]() текущего значения входного сигнала
текущего значения входного сигнала и предшествующих значений входного сигнала
![]() ,
, ![]() по формуле
по формуле
![]() , (B.12)
, (B.12)
где =0, 1, ...,
-1;
,
,
,
,
- коэффициенты цифрового фильтра.
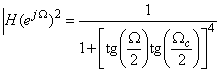
Частотная характеристика этого цифрового фильтра второго порядка имеет вид
 , (B.13)
, (B.13)
где - нормированная угловая частота,
![]() .
.
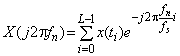
Постоянная частотная характеристика в полосе пропускания и резкий ее спад вне этой полосы могут быть получены с помощью фильтра Баттерворта, частотная характеристика которого имеет вид
 , (B.14)
, (B.14)
где - нормированная частота среза фильтра. На основе формулы для частотной характеристики фильтра могут быть получены коэффициенты
,
,
,
,
. Значения коэффициентов будут зависеть от установленной нормированной частоты среза
.
Рекуррентное вычисление выходного сигнала приводит к нелинейному фазовому сдвигу. Чтобы устранить сдвиг фазы, процедуру вычисления выходного сигнала повторяют "в обратном направлении" по формуле
![]() , (B.15)
, (B.15)
где =0, 1, …,
-1.
Тогда функция результирующего частотного отклика может быть выражена как:
![]() . (B.16)
. (B.16)
После двукратного применения алгоритма фильтрации сдвиг фаз между сигналами ![]() и
и отсутствует.
B.3 Метод дифференцирования
Для выполнения операции дифференцирования могут быть использованы разные методы. Наиболее простые из них, рекомендуемые настоящим стандартом, применяют для условий, когда высокочастотные искажения подавлены в достаточной степени, что обеспечивается посредством цифровой низкочастотной фильтрации согласно B.2. После выполнения цифровой низкочастотной фильтрации на основе значений перемещения, получаемых по формуле (B.10) и обозначаемых ![]() , могут быть рассчитаны значения скорости по формуле
, могут быть рассчитаны значения скорости по формуле
![]() . (В.17)
. (В.17)
Подстрочный индекс указывает, что значения, полученные дифференцированием, искажены низкочастотным шумом. Следовательно, для получения "сглаженной" последовательности
![]() к значениям скорости
к значениям скорости ![]() должна быть применена процедура фильтрации. При этих условиях для расчета ускорения может быть снова использована простая формула дифференцирования
должна быть применена процедура фильтрации. При этих условиях для расчета ускорения может быть снова использована простая формула дифференцирования
![]() . (B.18)
. (B.18)
B.4 Альтернативный метод дифференцирования
Другой метод получения производной для ряда
,
=0, 1, ...,
-1 (например, для ряда значений скорости
![]() , соответствующих гауссовскому импульсу), состоит из следующих этапов.
, соответствующих гауссовскому импульсу), состоит из следующих этапов.
a) Вычисляют комплексный спектр ![]() временного ряда для
временного ряда для ![]() путем применения дискретного преобразования Фурье (ДПФ) по формуле
путем применения дискретного преобразования Фурье (ДПФ) по формуле
 , (В.19)
, (В.19)
где ![]() .
.
b) Умножают комплексный спектр ![]() на комплексную угловую частоту для получения комплексного спектра первой производной
на комплексную угловую частоту для получения комплексного спектра первой производной
![]() , (B.20)
, (B.20)
где ![]() .
.
c) К полученным значениям ![]() применяют процедуру обратного дискретного преобразования Фурье (ОДПФ) для получения временной последовательности производной сигнала
применяют процедуру обратного дискретного преобразования Фурье (ОДПФ) для получения временной последовательности производной сигнала
 , (B.21)
, (B.21)
где ![]() .
.
Этот метод подавляет влияние искажающих сигналов на дифференцирование временной последовательности. Он может быть использован для вычисления производной гауссовских импульсов скорости для ударов низкого уровня.
Приложение C
(справочное)
Альтернативный метод вычисления модуля и фазового сдвига комплексного коэффициента преобразования
C.1 Модуль и, если выполнены условия C.2, фазовый сдвиг комплексного коэффициента преобразования могут быть получены путем использования промежуточных результатов этапа e) в 7.3.3. Амплитуду и начальную фазу, полученные из комплексного частотного спектра ускорения на частоте , обозначают
,
, где
![]() . (C.1)
. (C.1)
Вычисления выполняют в следующей последовательности.
a) Вычисляют комплексный частотный спектр выходного сигнала акселерометра, применяя ДПФ к выборке ![]() значений фильтрованного выходного сигнала акселерометра. Результирующие амплитуду и фазу на частоте
значений фильтрованного выходного сигнала акселерометра. Результирующие амплитуду и фазу на частоте обозначают
,
, где
![]() . (C.2)
. (C.2)
b) Вычисляют значения модуля ![]() и фазового сдвига
и фазового сдвига ![]() ,
, =0, 1, 2, ...,
-1) комплексного коэффициента преобразования по формулам:
![]() , (C.3)
, (C.3)
![]() . (C.4)
. (C.4)
Результаты калибровки должны включать в себя вычисленную расширенную неопределенность в соответствии с ИСО 16063-1.
C.2 Процедуры выборки для всех трех сигналов должны начинаться и заканчиваться в один и тот же момент времени и по крайней мере для обоих сигналов интерферометра должны быть синхронизированы с использованием одного и того же измерителя времени.
Для исключения искажающих влияний фазового отклика фильтра процедура фильтрации должна быть выполнена в двух направлениях (прямом и обратном) (см. приложение B). Это необходимо как по отношению к фильтрации обоих сигналов интерферометра, так и по отношению к выходному сигналу акселерометра. Для реализации фильтра Баттерворта 4-го порядка рекуррентные уравнения фильтрации должны иметь второй порядок.
C.3 Вышеприведенные соотношения основаны на процедуре с применением ДПФ, изложенной в приложении B, с учетом следующего. Значения коэффициентов Фурье ![]() для выборки выходного сигнала акселерометра и коэффициентов Фурье для выборки сигнала скорости
для выборки выходного сигнала акселерометра и коэффициентов Фурье для выборки сигнала скорости ![]() определяют комплексный коэффициент преобразования калибруемого акселерометра, рассчитываемый по формуле
определяют комплексный коэффициент преобразования калибруемого акселерометра, рассчитываемый по формуле
![]() , (C.5)
, (C.5)
где ![]() .
.
Для получения модуля и фазового сдвига комплексного коэффициента преобразования формулу (C.5) следует преобразовать к виду
 . (C.6)
. (C.6)
Используя символы, введенные в приложении B, модуль комплексного коэффициента преобразования можно представить формулой
![]() , (C.7)
, (C.7)
а фазовый сдвиг - формулой
![]() . (C.8)
. (C.8)
Примечание - Формулы (B.5) и (B.9) приложения B получены, в частности, в предположении идеальных условий измерений, которые на практике не выполнимы. В реальных условиях сигналы фотодетекторов имеют несовпадающие амплитуды и
, сдвиг фаз между ними не равен
![]() , следствием чего могут быть различные сдвиги
, следствием чего могут быть различные сдвиги и
. Влияние неидеальности квадратурного сигнала в пределах допусков, установленных в 4.6, рассмотрено в [6].
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов межгосударственным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование межгосударственного стандарта |
ISO 5347-22:1997 | - | * |
ISO 16063-1:1998 | IDT | ГОСТ ISO 16063-1-2013 "Вибрация. Методы калибровки датчиков вибрации и удара. Часть 1. Основные положения" |
ISO 16063-11:1999 | IDT | ГОСТ ISO 16063-11-2013 "Вибрация. Методы калибровки датчиков вибрации и удара. Часть 11. Первичная вибрационная калибровка методами лазерной интерферометрии" |
* Соответствующий национальный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT - идентичные стандарты. | ||
Библиография
[1] | VON MARTENS H.-J., SCHLAAK H.-J. and |
[2] | HARRIS C.M. and CREDE Ch.E. Shock and Vibration Handbook, 3rd edn., McGraw-Hill, New York, Toronto, London, 1987 |
[3] | EVANS D.J. Testing the sensitivity of accelerometers using mechanical shock pulses under NIST special publication 250 special test No. 24040S. ASME International Mechanical Engineering Congress & Exposition, San Francisco, California, 1995 |
[4] | KOLSKY H. Stress waves in solids. Dover Publications, New York, 1963, p.215 |
[5] | SILL R.D. Shock calibration of accelerometers at amplitudes to using compression waves. Proceedings of the 29th International Instrumentation Symposium, Albuquerque, New Mexico, 1983; Instrument Society of America, Instrumentation in the Aerospace Industry, 29, pp.503-516 |
[6] | LINK A., VON MARTENS H.-J. and WABINSKI W. New method for absolute shock calibration of accelerometers. SPIE, 3411, 1998, pp.224-235 |
[7] | WABINSKI W. and VON MARTENS H.-J. Time interval analysis of interferometer signals for measuring amplitude and phase of vibrations. SPIE, 2868, 1996, 166-177 |
[8] | LINK A., GERHARDT J. and VON MARTENS H.-J. Amplitude and phase calibration of accelerometers in the nanometer range. SPIE, 2868, 1996, pp.37-48 |
[9] |
|
[10] | TRIBOLET J.M. A new phase unwrapping algorithm. IEEE Transactions on Acoustics, Speech, and Signal Processing, ASSP-25, No.2, April 1977, pp.170-177 |
[11] | Guide to the expression of uncertainty in measurement. BIPM, IEC, IFCC, ISO, IMPAC, IMPAP, OIML, 1993 |
[12] | VON MARTENS H.-J. and ROGAZEWSKI P. Representation and transfer of the units of vibration quantities in the GDR. Bulletin OIML, No.108, Sept. 1987. pp.26-37 |
[13] |
|
[14] | ISO 5347-4:1993, Methods for the calibration of vibration and shock pick-ups - Part 4: Secondary shock calibration |
________________
Заменен на ISO 16063-22:2005 "Methods for the calibration of vibration and shock transducers - Part 22: Shock calibration by comparison to a reference transducer".
УДК 620.178.5.05:006.354 | ОКС 17.160 |
Ключевые слова: вибрация, удар, датчики, калибровка, метод лазерной интерферометрии, неопределенность измерения | |
Электронный текст документа
и сверен по:
, 2019
{kind=link}