ГОСТ ISO 16063-21-2013
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Вибрация
МЕТОДЫ КАЛИБРОВКИ ДАТЧИКОВ ВИБРАЦИИ И УДАРА
Часть 21
Вибрационная калибровка сравнением с эталонным преобразователем
Vibration. Methods for the calibration of vibration and shock transducers. Part 21. Vibration calibration by comparison to a reference transducer
МКС 17.160
Дата введения 2014-11-01
Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены в ГОСТ 1.0-2015 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2-2015 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Федеральным государственным унитарным предприятием "Всероссийский научно-исследовательский институт метрологической службы" (ФГУП "ВНИИМС") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 5, с участием Открытого акционерного общества "Научно-исследовательский центр контроля и диагностики технических систем" (АО "НИЦ КД")
2 ВНЕСЕН Федеральным агентством по техническому регулированию и метрологии
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 3 декабря 2013 г. N 62-П)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по | Сокращенное наименование национального органа по стандартизации |
Азербайджан | AZ | Азстандарт |
Армения | AM | Минэкономики Республики Армения |
Беларусь | BY | Госстандарт Республики Беларусь |
Грузия | GE | Грузстандарт |
Казахстан | KZ | Госстандарт Республики Казахстан |
Киргизия | KG | Кыргызстандарт |
Молдова | MD | Молдова-Стандарт |
Россия | RU | Росстандарт |
Таджикистан | TJ | Таджикстандарт |
Туркменистан | TU | Главгосслужба "Туркменстандартлары" |
Узбекистан | UZ | Узстандарт |
Украина | UA | Госпотребстандарт Украины |
4 Приказом Федерального агентства по техническому регулированию и метрологии от 5 декабря 2013 г. N 2184-ст межгосударственный стандарт ГОСТ ISO 16063-21-2013 введен в действие в качестве национального стандарта Российской Федерации с 1 ноября 2014 г.
5 Настоящий стандарт идентичен международному стандарту ISO 16063-21:2003* "Методы калибровки датчиков вибрации и удара. Часть 21. Вибрационная калибровка сравнением с эталонным преобразователем" ("Methods for the calibration of vibration and shock transducers - Part 21: Vibration calibration by comparison to a reference transducer", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Международный стандарт разработан Подкомитетом ISO/TC 108/SC 3 "Применение и калибровка средств измерений вибрации и удара" Технического комитета по стандартизации ISO/TC 108 "Вибрация и удар" Международной организации по стандартизации (ISO).
Официальные экземпляры международного стандарта, на основе которого подготовлен настоящий межгосударственный стандарт, и международных стандартов, на которые даны ссылки, имеются в Федеральном агентстве по техническому регулированию и метрологии.
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ 1.5 (подраздел 3.6).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов (документов) соответствующие им межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА.
Настоящий стандарт подготовлен на основе применения ГОСТ Р ИСО 16063-21-2009
________________
Приказом Федерального агентства по техническому регулированию и метрологии от 5 декабря 2013 г. N 2184-ст ГОСТ Р ИСО 16063-21-2009 отменен с 1 ноября 2014 г.
6 ВЗАМЕН ГОСТ 30652-99 (ИСО 5347-3-93)
7 ПЕРЕИЗДАНИЕ. Март 2019 г.
Информация об изменениях к настоящему стандарту публикуется в ежегодном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячном информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
1 Область применения
Настоящий стандарт устанавливает метод калибровки преобразователей поступательной вибрации методом сравнения в диапазоне частот от 0,4 Гц до 10 кГц. Настоящий стандарт рассматривает сравнение с преобразователем, калиброванным одним из первичных методов, однако аналогичный метод может быть применен для любой ступени поверочной схемы.
________________
В настоящем стандарте вместо термина "датчик" используется более общий термин "преобразователь", что точнее соответствует используемому в оригинале международного стандарта термину "transducer".
Установленный метод калибровки применяют для преобразователей, предназначенных преимущественно для измерений в лабораторных условиях, где допустимая неопределенность измерения относительно мала. Однако допускается применение метода для калибровки преобразователей и в случаях, когда требования к неопределенности измерения не столь строги.
Калибровку методом сравнения проводят в тех же условиях, в которых была проведена калибровка эталонного преобразователя.
2 Нормативные ссылки
Для применения настоящего стандарта необходимы следующие ссылочные стандарты*. Для датированной ссылки применяют только указанное издание ссылочного стандарта. Для недатированной - последнее издание ссылочного стандарта (включая все изменения к нему).
ISO 266, Acoustics - Preferred frequencies (Акустика. Предпочтительные ряды частот)
ISO 2041:1990, Vibration and shock - Vocabulary (Вибрация и удар. Словарь)
ISO 16063-1:1998, Methods for calibration of vibration and shock transducers - Part 1: Basic concepts (Методы калибровки датчиков вибрации и удара. Часть 1. Основные положения)
ISO 16063-11:1999, Methods for calibration of vibration and shock transducers - Part 11: Primary vibration calibration by laser interferometry (Методы калибровки датчиков вибрации и удара. Часть 11. Первичная вибрационная калибровка методами лазерной интерферометрии)
Guide to the expression of uncertainty in measurement (GUM:1995) [Руководство по выражению неопределенности измерения (GUM:1995)]
3 Неопределенность измерения
3.1 Перед проведением калибровки должен быть составлен бюджет неопределенности измерения в соответствии с приложением A для оценки расширенной неопределенности измерения коэффициента преобразования (см. пример в приложении D).
Поскольку неопределенность измерения при калибровке определяется ее условиями, метод калибровки сравнением, установленный настоящим стандартом, показан на двух примерах, отражающих типичные условия калибровки. Данные примеры могут быть использованы в качестве ориентиров при выборе пользователем испытательного оборудования. Пример 1 является типичным для калибровки в лабораторных условиях при хорошо контролируемых факторах окружающей среды, что позволяет достигнуть высокой точности измерений. Пример 2 типичен для калибровок, допускающих меньшую точность измерений или проводимых в условиях, где не удается соблюсти узкие допуски на влияющие величины.
a) Пример 1. Эталонный преобразователь калиброван первичным методом и имеет документированную неопределенность измерения. Эталонный преобразователь используют для калибровки рабочего эталона или рабочего преобразователя. Температуру и другие влияющие величины поддерживают в узких пределах в течение всей процедуры калибровки.
b) Пример 2. Эталонный преобразователь калиброван не первичным методом, но является рабочим эталоном. Рабочий эталон используют для калибровки рабочего эталона следующего разряда или рабочего преобразователя. Требования к условиям калибровки и испытательному оборудованию указаны в соответствующих разделах.
3.2 Минимальное требование к определению условий испытаний состоит в задании частоты и амплитуды сигнала возбуждения и температуры окружающего воздуха. Обычно условия испытаний выбирают по ISO 16063-11:
- диапазон частот от 20 до 5000 Гц с допустимым расширением от 0,4 до 10000 Гц (см. примечание);
- динамический диапазон (для среднеквадратичных значений ускорения) от 10 до 1000 м/с с допустимым расширением от 0,1 до 1000 м/с
(в зависимости от частоты).
Примечание - Указанные диапазоны частот не являются обязательными. Допускается проведение калибровки в одной точке диапазона.
Для каждой заданной частоты и амплитуды ускорения, скорости или перемещения динамический диапазон ограничен шумовым порогом и искажениями формы сигнала, воспроизводимого вибростендом (при отсутствии фильтрации сигнала), а также мощностью вибростенда. Искажения сигнала, наблюдаемые при больших значениях перемещения у вибростендов с подпружиненным вибростолом, компенсируют, изменяя соответствующим образом форму задающего сигнала. Типичные максимальные значения параметров вибрации, воспроизводимой электродинамическим вибростендом в диапазоне частот от 10 Гц до 10 кГц, равны: от 200 до 1000 м/с для среднеквадратичного значения ускорения, от 0,5 до 1 м/с для среднеквадратичного значения скорости, до 5 мм для пикового значения перемещения. На практике предельные значения ниже из-за шумов в обоих каналах измерений и расширения диапазона частот. Поэтому типичными рабочими диапазонами являются: для среднеквадратичного значения ускорения до 50-100 м/с
, для среднеквадратичного значения скорости до 0,1 м/с. Чаще всего калибровку проводят для диапазона среднеквадратичных значений ускорения от 1 до 10 м/с
. При рассмотрении диапазонов измерений полезно использовать номограмму, приведенную в приложении C.
Если измерения выполняют вблизи нижней границы диапазона частот, то предельная вибрация обычно обусловлена допустимым перемещением. На частоте 1 Гц типичными предельными значениями для длинноходовых вибростендов являются среднеквадратичное значение ускорения от 1 до 2 м/с или среднеквадратичное значение скорости от 0,1 до 0,3 м/с.
3.3 Достижимая расширенная неопределенность, вычисленная в соответствии с ISO 16063-1 с использованием значения коэффициента охвата, равного двум, приведена в таблице 1 для обоих примеров, определенных в 3.1. На практике эти границы могут быть увеличены в зависимости от неопределенности измерения при калибровке эталонного преобразователя, вида амплитудно-частотных характеристик калибруемого и эталонного преобразователя, характеристик возбуждаемой вибростендом вибрации и используемых средств измерений. Ответственность за достоверность сведений о неопределенности измерения при калибровке несет лаборатория, проводящая калибровку.
Таблица 1 - Достижимая неопределенность измерения модуля и фазового сдвига комплексного коэффициента преобразования преобразователя
Параметр | Неопределенность измерения | |
Пример 1 | Пример 2 | |
Модуль коэффициента преобразования | ||
- для акселерометров в диапазоне от 0,4 до 1000 Гц | 1% | 3% |
- для акселерометров в диапазоне от 1000 до 2000 Гц | 2% | 5% |
- для акселерометров в диапазоне от 2 до 10 кГц | 3% | 10% |
- для преобразователей скорости и перемещения в диапазоне от 20 до 1000 Гц | 4% | 6% |
Фазовый сдвиг | ||
- для опорных значений | 1° | 3° |
- для всего диапазона частот и амплитуд | 2,5° | 5° |
- частота, Гц: 160, 80, 40, 16 или 8 (или угловая частота - ускорение, м/с Примечание - Указанные в таблице значения расширенной неопределенности основаны на бюджете неопределенности, приведенном в приложении D. | ||
4 Требования к испытательному оборудованию и средствам измерений
4.1 Общие положения
Требования установлены для примеров калибровки, приведенных в 3.1. При выполнении всех установленных требований следует ожидать, что неопределенность измерения не превысит значений, указанных в таблице 1, во всем диапазоне частот измерений. Однако даже при невыполнении некоторых из нижеперечисленных требований неопределенность измерения может оставаться в границах, указанных в таблице 1. Чтобы обеспечить неопределенность измерения, не превышающую значений таблицы 1 на частотах ниже 1 Гц, может потребоваться применение специальных средств. Расширенная неопределенность должна быть указана в протоколе калибровки в соответствии с приложением A.
4.2 Условия окружающей среды
Калибровку проводят при следующих условиях окружающей среды:
Пример 1 | Пример 2 | ||||
Температура окружающего воздуха | (23±5)°С | (23±10)°С | |||
Относительная влажность | не более 75% | не более 90% | |||
4.3 Эталонный преобразователь
Предпочтительно, чтобы эталонный преобразователь был калиброван совместно с усилителем.
a) Пример 1
Преобразователь должен быть калиброван одним из методов первичной калибровки или методом сравнения с преобразователем, калиброванным одним из методов первичной калибровки. Расширенная неопределенность коэффициента преобразования (при значении коэффициента охвата, равном двум) не должна превышать 0,5% для модуля и 0,5° для фазового сдвига для заданных опорных значений амплитуды и частоты ускорения. На высоких и низких частотах диапазона измерений допускается большее значение неопределенности измерения.
b) Пример 2
Преобразователь должен быть калиброван одним из известных методов в соответствии с поверочной схемой, обеспечивающим расширенную неопределенность коэффициента преобразования (при значении коэффициента охвата, равном двум) не более 2% для модуля и 2° для фазового сдвига для заданных опорных значений амплитуды и частоты ускорения. На высоких и низких частотах диапазона измерений допускается большее значение неопределенности измерения.
Эталонный преобразователь может предусматривать крепление калибруемого преобразователя на свою верхнюю монтажную поверхность (метод установки "спина к спине") (см. рисунок 1). Другой способ установки преобразователей - соосное крепление снизу и сверху на одну вибрирующую поверхность. Не рекомендуется устанавливать преобразователи рядом друг с другом, поскольку угловые колебания вибростола могут вызывать значительные погрешности измерений. Используют также эталонные преобразователи, постоянно установленные на подвижном элементе вибростенда для калибровки других преобразователей методом сравнения.
4.4 Вибростенд
Характеристики вибростенда должны удовлетворять требованиям, указанным в таблице 2.
Таблица 2 - Требования к характеристикам вибростенда
Параметр | Пример 1 | Пример 2 |
Неопределенность измерения частоты, %, не более | 0,1 | 0,2 |
Отклонения частоты на периоде измерений, %, не более | 0,1 | 0,2 |
Отклонения амплитуды ускорения на периоде измерений, %, не более | 0,1 | 0,3 |
Коэффициент гармоник (на частотах | 5 | 10 |
Коэффициент гармоник (во всем диапазоне частот), %, не более | 10 | 20 |
Поперечное и угловые колебания вибростола, %, не более | 10 при | |
Отношение "сигнал/шум" (на частотах | 50 | 40 |
Отношение "сигнал/шум" (на частотах | 20 | 10 |
|
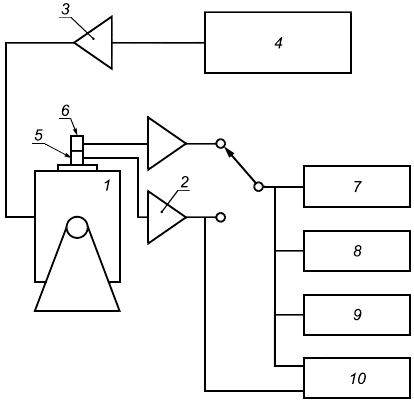
1 - вибростенд; 2 - усилители; 3 - усилитель мощности; 4 - генератор сигнала; 5 - эталонный преобразователь; 6 - калибруемый преобразователь; 7 - вольтметр; 8 - измеритель коэффициента гармоник; 9 - осциллограф (необязательный элемент); 10 - измеритель фазового сдвига (необязательный элемент)
Рисунок 1 - Блок-схема испытательной установки для вибрационной калибровки сравнением с эталонным преобразователем
Требования к помехам и шуму важны в случае, если они действуют в пределах полосы измерения. Для каждого сочетания частоты, амплитуды ускорения и нагрузки, которые используют в процессе калибровки, требования к амплитудам поперечного и угловых ускорений, помехам и шуму должны обеспечивать выполнение требований к неопределенности измерения согласно разделу 3.
Следует убедиться, что на результаты калибровки не окажут существенного влияния статические или динамические деформации поверхности, на которую устанавливают преобразователи.
Поверхности, на которые устанавливают преобразователи, должны удовлетворять требованиям по неплоскостности и шероховатости. Особо жесткими данные требования должны быть при измерениях вблизи верхней границы диапазона частот. Среднее арифметическое отклонение профиля поверхности , на которую устанавливают преобразователь, должно быть менее 1 мкм. Неплоскостность поверхности установки преобразователей не должна превышать 5 мкм на монтажной поверхности калибрируемого преобразователя. Отверстия для крепления преобразователя не должны отклоняться от перпендикуляра к поверхности более чем на 10 мкм, т.е. ось отверстия должна быть в пределах цилиндра диаметром 10 мкм и высотой, равной глубине отверстия.
Поверхность, на которую устанавливают преобразователи, должна быть перпендикулярна направлению движения. Любое отклонение от перпендикулярности должно учитываться в бюджете неопределенности (см. приложение A).
Примечание - Для калибровки могут использоваться генераторы полигармонических, гармонических и случайных колебаний совместно с частотными анализаторами. Обычно для полигармонических и случайных сигналов применяют анализаторы, реализующие процедуру быстрого преобразования Фурье (БПФ-анализаторы), а для гармонических сигналов - гармонические анализаторы. В случае применения для контроля формы сигнала частотных анализаторов нелинейные искажения обычно не играют роли, поэтому применение частотных анализаторов вместо широкополосных вольтметров, измеряющих среднеквадратичное значение, является предпочтительным. Последние, хотя и обеспечивают в принципе более высокую точность измерений, но результат измерений чувствителен к искажениям формы сигнала и присутствию других сигналов на частотах, отличных от опорной частоты. Для оценки того, находятся ли отношение "сигнал/шум" и линейность преобразователей в пределах установленных границ в случае усреднения спектров, можно использовать функцию когерентности. При случайном возбуждении с усреднением спектра по 64 реализациям при значении функции когерентности не ниже 0,98 погрешность измерений по двум каналам, связанная со значением отношения "сигнал/шум" и нелинейностью, будет менее 0,9%. Однако в редких случаях широкополосное возбуждение может вызывать нежелательную поперечную вибрацию или выходные сигналы на частоте измерений из-за нелинейного поведения вибростенда или преобразователя.
4.5 Приборы для измерения электрического напряжения
Измерения проводят одним из следующих способов.
a) Истинные среднеквадратичные значения выходных сигналов усилителей эталонного и калибрируемого преобразователей измеряют последовательно одним и тем же вольтметром, причем сигнал усилителя эталонного преобразователя измеряют по меньшей мере дважды. Вольтметр должен удовлетворять требованиям, указанным в таблице 3.
Таблица 3 - Требования к характеристикам вольтметра
Параметр | Пример 1 | Пример 2 |
Диапазон частот, Гц | От 1 до 10000 | От 1 до 10000 |
Максимальное отклонение от линейности, % | 0,1 | 0,3 |
Максимальное отклонение между двумя последовательными измерениями эталонного преобразователя, % | 0,1 | 0,3 |
Примечание - Значения в последней строке характеризуют повторяемость измерений. Они представляют собой общие требования к повторяемости, включая повторяемость показаний вольтметра. | ||
b) Используют измеритель отношения напряжений выходных сигналов усилителей преобразователей. Характеристики измерителя должны удовлетворять требованиям, указанным в таблице 4.
Таблица 4 - Требования к измерителю отношения напряжений
Параметр | Пример 1 | Пример 2 |
Диапазон частот, Гц | От 1 до 10000 | От 1 до 10000 |
Максимальная неопределенность измерения, % | 0,2 | 0,5 |
4.6 Устройство измерения коэффициента гармоник
Устройство для измерения значения коэффициента гармоник в диапазоне от 1% до 10% должно удовлетворять требованиям, установленным в таблице 5.
Таблица 5 - Требования к измерителю коэффициента гармоник
Параметр | Пример 1 | Пример 2 |
Диапазон частот, Гц | От 1 до 50000 | От 1 до 50000 |
Максимальная неопределенность измерения, % | 10 | 10 |
Примечание - Измерение коэффициента гармоник выполняют только при использовании гармонического сигнала, поэтому оно не входит в метод калибровки. Такое измерение проводят перед калибровкой для проверки испытательного оборудования и потом повторяют через определенные интервалы времени или по мере необходимости, чтобы убедиться, что оборудование продолжает удовлетворять установленным требованиям. | ||
4.7 Осциллограф
Осциллограф или аналогичное устройство может быть использовано для наблюдения формы сигналов преобразователей.
Его использование рекомендуется, но не является обязательным.
4.8 Измеритель фазового сдвига
Измеритель фазового сдвига должен удовлетворять требованиям, указанным в таблице 6.
Таблица 6 - Требования к измерителю фазового сдвига
Параметр | Пример 1 | Пример 2 |
Диапазон частот, Гц | От 1 до 10000 | От 1 до 10000 |
Максимальная неопределенность измерения | 0,2° | 0,5° |
5 Калибровка
5.1 Предпочтительные значения амплитуд и частот
Калибровку проводят на шести частотах, каждой из которых соответствует свое значение амплитуды ускорения. Эти частоты должны быть равномерно распределены по всему диапазону частот измерений калибруемого преобразователя.
Предпочтительные значения амплитуд ускорений и частот калибровки выбирают из следующих рядов:
a) ускорение: 1; 2; 5; 10; 20; 50; 100 м/с. Если калибровку проводят при возбуждении широкополосного сигнала, то значениям данного ряда соответствуют среднеквадратичные значения ускорения;
b) частоты выбирают из стандартизованного ряда частот для третьоктавных полос по ISO 266. При использовании широкополосного сигнала возбуждения калибровку проводят, возбуждая несколько сигналов, в совокупности перекрывающих весь диапазон частот измерений преобразователя.
Выбираемые значения амплитуд и частот предпочтительно должны быть теми же, что использовались при калибровке эталонного преобразователя. Если калибровку проводят при других значениях амплитуд и частот, то характеристики эталонного преобразователя в этих точках должны быть известны вместе с соответствующей расширенной неопределенностью, которую необходимо принимать в расчет при составлении бюджета неопределенности (см. приложение А).
5.2 Требования к измерениям
Если калибровку проводят с использованием нового оборудования или для нового преобразователя, то целесообразно повторить ее несколько раз, чтобы убедиться в хорошей повторяемости результатов измерений.
Необходимо удостовериться, что движения кабелей и деформация основания преобразователя не оказывают заметного влияния на результаты измерений, особенно на низких частотах. Влияние способа подсоединения кабеля и крепления преобразователя можно оценить, выполняя операции по подсоединению кабеля и креплению преобразователя несколько раз и отмечая, как изменяются результаты измерений и какие искажения формы сигнала при этом наблюдаются. Если изменения определяемого коэффициента преобразования или коэффициент гармоник окажутся незначительными по сравнению с неопределенностью измерения при калибровке, то влиянием указанных факторов можно пренебречь.
Если преобразователь калибруют без усилителя или устройства согласования (далее - усилитель), то амплитудно-частотная характеристика и, при необходимости, фазочастотная характеристика усилителя, используемого с преобразователем, должна быть определена на всех частотах возбуждаемого при калибровке сигнала. Коэффициент преобразования эталонного преобразователя вместе с его усилителем также должен быть известен во всем диапазоне частот измерений.
Если в процессе калибровки будут выявлены изменения ее условий, влияние которых сопоставимо с ожидаемой неопределенностью измерения, то необходимо получить количественную оценку этих изменений путем проведения достаточного числа повторных измерений. Полученное значение выборочной дисперсии повторных измерений необходимо включить в оценку расширенной неопределенности. Это особенно важно, если измерения проводили не при тех же значениях частот и амплитуд, при которых калиброван эталонный преобразователь.
5.3 Процедура калибровки
Монтажную поверхность эталонного преобразователя (если калибруемый преобразователь устанавливают на нее способом "спина к спине") или приспособление, на которое устанавливают калибруемый преобразователь, а также поверхность основания калибруемого преобразователя проверяют на отсутствие заусенцев и иных дефектов для подтверждения соответствия требованиям к неплоскостности, установленным изготовителем, а также требованиям раздела 4.
Эталонный и калибрируемый преобразователи устанавливают способом "спина к спине" или соосно на подвижном элементе вибростенда с рекомендуемыми моментом затяжки. Если вибростенд предназначен специально для калибровки методом сравнения и имеет встроенный эталонный преобразователь, то калибруемый преобразователь устанавливают в соответствии с условиями, определенными при калибровке эталонного преобразователя. На частотах ниже 5 кГц может быть использован подвижный элемент с известной частотной характеристикой. На более высоких частотах калибровки следует использовать установку способом "спина к спине" или вибростенд со встроенным эталонным преобразователем. Пример блок-схемы типичной установки для калибровки методом сравнения показан на рисунке 1. Вольтметр, переключатель каналов измерений, генератор сигналов и измеритель фазового сдвига часто заменяют специальной двухканальной аппаратурой (например, двухканальным анализатором со встроенным генератором или измерителем отношения напряжений), позволяющей обеспечить требуемую точность измерений.
Измеряют отношение выходных сигналов калибруемого и эталонного преобразователей и при необходимости сдвиг фаз между ними.
Определяют коэффициент преобразования на опорной частоте (для акселерометров предпочтительно на частоте 160 Гц и, как вариант, 80 Гц) при опорной амплитуде ускорения (для акселерометров предпочтительно при амплитуде 100 м/с и, как вариант, 20 или 50 м/с
). Затем определяют коэффициент преобразования для других частот и ускорений. Результаты приводят в абсолютных единицах и/или как относительное отклонение в процентах или децибелах (для фазового сдвига - как отклонение в градусах) от коэффициента преобразования в опорной точке.
В случае установки преобразователей на шпильку для улучшения контакта между монтажной поверхностью преобразователя и поверхностью установки необходимо нанести тонкий слой легкого масла, воска или смазки, особенно в случае калибровки на высоких частотах (см. [1]).
6 Представление результатов
Если эталонный и калибруемый преобразователи предназначены для измерения одной и той же величины, то рассчитывают модуль и фазовый сдвиг
комплексного коэффициента преобразования по формулам:
![]() ,
, ![]() ,
,
где ,
- модуль и фазовый сдвиг комплексного коэффициента преобразования эталонного преобразователя;
- выходной сигнал эталонного преобразователя;
- выходной сигнал калибрируемого преобразователя;
- сдвиг фаз между выходными сигналами калибрируемого и эталонного преобразователей.
Если калибруемый и эталонный преобразователи предназначены для измерения разных величин, то вначале определяют коэффициент преобразования калибруемого преобразователя по той же величине, по которой работает эталонный преобразователь, а затем преобразуют его в коэффициент преобразования по ускорению (,
), скорости (
,
) или перемещения (
,
) по формулам:
![]() ,
, ![]() ,
,![]() ,
, ![]() ,
,
где - частота сигнала возбуждения, Гц.
Фазовый сдвиг комплексного коэффициента преобразования зависит от выбора положительного направления измерений преобразователя, положительного направления возбуждаемых колебаний и полярности электрического сигнала на выходе преобразователя. При необходимости фазовый сдвиг должен быть изменен на 180° [см. ISO 16063-1:1998 (пункт 3.3) и приложение В].
7 Протокол калибровки
При составлении протокола калибровки в нем кроме указания метода калибровки и примененных средств испытаний и измерений приводят следующую информацию:
a) условия окружающей среды для примера 1:
- температуру калибруемого преобразователя (если была измерена),
- температуру окружающего воздуха и примерное отличие температуры окружающего воздуха от температуры калибруемого преобразователя, если последняя не измерена;
b) условия окружающей среды для примера 2:
- примерную температуру калибруемого преобразователя;
c) сведения о креплении преобразователя:
- материал поверхности, на которую устанавливают преобразователь,
- момент затяжки, если преобразователь устанавливают на шпильку (для примера 2 эта информация не является обязательной), или используемый адгезивный материал,
- характеристики крепежных приспособлений или переходников (если они использованы),
- материал, наносимый на монтажную поверхность: масло, смазка или воск (если он использован),
- способ закрепления кабеля,
- ориентацию преобразователя;
d) настройки усилителя (если использовались) в случае калибровки преобразователя совместно с усилителем:
- коэффициент усиления,
- частоты среза и крутизна спадов частотных характеристик фильтров;
e) результаты калибровки:
- амплитуды и частоты ускорения, на которых проводилась калибровка,
- значение коэффициента преобразования (модуля и фазового сдвига, если он измерен),
- коэффициент когерентности (если он измерен);
- расширенную неопределенность при калибровке, рассчитанную в соответствии с приложением A;
f) значение коэффициента охвата (если использовано значение
, отличное от двух).
Приложение A
(обязательное)
Расчет неопределенности измерения при калибровке
A.1 Вычисление расширенной неопределенности
A.1.1 Назначение расчетов расширенной неопределенности
Неопределенность измерения при калибровке должна быть выражена в виде расширенной неопределенности в соответствии с ISO/IEC Guide 98-3. Цель вычисления неопределенности состоит в построении интервала (
![]() ,
, ![]() ), в пределах которого с большой вероятностью находится значение величины
), в пределах которого с большой вероятностью находится значение величины (искомого параметра калибровки, для которого в результате проведения калибровки было получено значение
).
Ниже изложен метод расчета значения .
А.1.2 Корректировка результата измерений
Должны быть выявлены все величины и условия, влияющие на результат измерения (источники неопределенности), и устранены все систематические эффекты влияния данных источников путем внесения поправок или с помощью корректирующих коэффициентов.
Если величина, влияющая на результат измерений, может быть описана через распределение вероятности (предпочтительно, плотностью вероятности распределения, см. A.1.3), имеющей значительное математическое ожидание (что может иметь место, например, для ассиметричного распределения), то данное математическое ожидание следует считать систематической погрешностью и внести соответствующую поправку.
A.1.3 Оценка стандартной неопределенности
Каждая составляющая неопределенности, дающая вклад в общую неопределенность измерения, должна быть описана через свое стандартное отклонение , называемое стандартной неопределенностью, равное квадратному корню из дисперсии
.
Некоторые стандартные неопределенности могут быть получены как статистические оценки в результате статистического анализа серии наблюдений (оценки типа A). Другие стандартные неопределенности оценивают, выдвигая некоторые обоснованные гипотезы о возможном распределении влияющей величины (оценки типа B). Для построения такой гипотезы используют всю доступную информацию о влияющей величине. Например, если о величине неизвестно ничего, кроме того, что ее значения не выходят за пределы границ и
, то обоснованно предположить, что данная величина распределена по равномерному закону на интервале [
,
]. Стандартное отклонение для такой величины будет равно
![]() , где
, где ![]() . Математическое ожидание данной величины
. Математическое ожидание данной величины ![]() необходимо использовать для внесения поправки.
необходимо использовать для внесения поправки.
Если про некоторую влияющую величину, распределенную по равномерному закону (прямоугольная плотность вероятности распределений), известно, что зависимость результата измерений от данной величины представляет собой некоторую нелинейную функцию (например, синусоидальную или полиномиальную второго или третьего порядка), то данную информацию необходимо учитывать при определении закона распределения измеряемой величины.
Пример - Коэффициент преобразования акселерометра рассчитывают по выходному сигналу (амплитуде напряжения или заряда
), обусловленному действием вибрации, и амплитуде ускорения
по формуле
![]() . На результат измерений коэффициента преобразования может оказать влияние значительная поперечная составляющая колебаний стола вибростенда, амплитуда ускорения которой
. На результат измерений коэффициента преобразования может оказать влияние значительная поперечная составляющая колебаний стола вибростенда, амплитуда ускорения которой . С учетом коэффициента поперечного преобразования акселерометра
ускорение стола в поперечном направлении даст соответствующий вклад в погрешность измерений
в выходном сигнале. В предположении, что поперечное ускорение имеет ту же частоту, что и ускорение в основном направлении возбуждения, что фазовый сдвиг равен нулю, а также то, что поперечное ускорение обычно является синусоидальной функцией от угла
между направлением максимальной поперечной чувствительности и направлением поперечного движения стола вибростенда, данную составляющую погрешности можно выразить формулой
![]() .
.
Значения максимального коэффициента поперечного преобразования и поперечного ускорения могут быть известны (измерены), а угла - нет. В этом случае допустимо предположить, что величина
распределена равномерно в интервале [
;
]. В данном примере влияющая величина (т.е. поперечное ускорение с прямоугольным распределением
) дает составляющую погрешности измерения
, плотность вероятности распределения которой имеет вид
 .
.
Этому распределению соответствует стандартная неопределенность ![]() . Математическое ожидание
. Математическое ожидание в данном случае будет равно нулю. Полученный результат является лучшей оценкой погрешности
.
A.1.4 Суммарная стандартная неопределенность
В случае нескольких источников неопределенности определяют суммарную стандартную неопределенность измерений величины
через стандартные неопределенности
![]() и ковариации
и ковариации ![]() отдельных источников, используя закон трансформирования неопределенностей, выраженный формулой
отдельных источников, используя закон трансформирования неопределенностей, выраженный формулой
 . (A.1)
. (A.1)
Эта формула основана на приближении первого порядка разложения в ряд Тейлора функции
![]() , (A.2)
, (A.2)
где - измеряемая величина;
,
, ...,
- влияющие величины.
Оценку измеряемой величины
получают из формулы (A.2), подставляя оценки влияющих величин
,
, ...,
. Таким образом, результат измерений имеет вид
![]() . (A.3)
. (A.3)
В формуле (A.1) множители ![]() , представляющие собой частные производные
, представляющие собой частные производные ![]() в точке
в точке ![]() , часто называют коэффициентами чувствительности.
, часто называют коэффициентами чувствительности.
В случае отсутствия существенных корреляций ![]() между влияющими величинами формула (A.1) упрощается и приводится к виду
между влияющими величинами формула (A.1) упрощается и приводится к виду
 . (A.4)
. (A.4)
Примечание - Приближение первого порядка разложения функции (A.2) в ряд Тейлора, результатом чего является формула (A.1), возможно применять только в том случае, если функция для каждой независимой переменной близка к прямо или обратно пропорциональной зависимости в пределах изменения этой переменной [интервала, характеризуемого стандартной неопределенностью
]. Пример, приведенный в A.1.3 (если угол
рассматривать как входную величину
), не соответствует этому условию. Чтобы преодолеть это ограничение, была предложена модель (см. [4]), суть которой можно пояснить на том же примере. В формулу для измеряемой величины вводят в качестве дополнительной влияющей величины множитель
![]() ,
, ![]() . Таким образом, применительно к данному примеру на измеряемую величину
. Таким образом, применительно к данному примеру на измеряемую величину (коэффициент преобразования
) влияют три величины
![]() ,
,
где - амплитуда выходного сигнала акселерометра;
- амплитуда ускорения;
![]() .
.
Тогда формула (A.2) для данного примера примет вид
![]() .
.
Это позволяет использовать первые два члена разложения ряда Тейлора функции для получения относительной суммарной стандартной неопределенности (в пренебрежении корреляцией между влияющими величинами)
 .
.
Используя обозначения примера, формулу для относительной стандартной неопределенности коэффициента преобразования можно записать в виде
 ,
,
где ![]() - относительная неопределенность измерений амплитуды выходного сигнала (напряжения или заряда);
- относительная неопределенность измерений амплитуды выходного сигнала (напряжения или заряда);
![]() - относительная неопределенность измерений амплитуды ускорения;
- относительная неопределенность измерений амплитуды ускорения;
![]() ,
, ![]() (как объяснено в примере).
(как объяснено в примере).
Аналогичный прием можно применить и в отношении других величин, влияющих на переменные уравнения измерений (A.2), когда эти величины можно включить в относительные погрешности переменных. Это позволит учитывать по отдельности каждый из множества источников неопределенности.
A.1.5 Расширенная неопределенность
Расширенную неопределенность определяют умножением
на коэффициент охвата
по формуле
![]() .
.
Значение коэффициента охвата обычно выбирают равным двум.
Если есть основания предполагать, что результаты калибровки имеют нормальное распределение, стандартное отклонение которого приблизительно равно , то можно утверждать, что искомая величина (характеристика, определяемая при калибровке) лежит в интервале, определяемом
, с вероятностью приблизительно 95%.
A.1.6 Представление результатов измерений
При представлении результатов измерений указывают значение расширенной неопределенности, а также использованное при этом значение коэффициента охвата, если оно не равно двум. Кроме того, может быть указана доверительная вероятность для построенного интервала (
![]() ,
, ![]() ).
).
A.2 Вычисление расширенной неопределенности в точках калибровки
A.2.1 Вычисление относительной расширенной неопределенности ![]() модуля коэффициента преобразования
модуля коэффициента преобразования
Относительную расширенную неопределенность ![]() модуля коэффициента преобразования для частот, амплитуд и настроек усилителя (если преобразователь калибруют вместе с усилителем), при которых проведена калибровка, вычисляют по формулам:
модуля коэффициента преобразования для частот, амплитуд и настроек усилителя (если преобразователь калибруют вместе с усилителем), при которых проведена калибровка, вычисляют по формулам:
![]() ,
, ,
где - коэффициент преобразования;
![]() - модуль коэффициента преобразования;
- модуль коэффициента преобразования;
- входная (влияющая) величина;
![]() - ковариация между
- ковариация между и
(равная нулю, если входные величины независимы).
Примечание 1 - Корреляционные слагаемые часто опускают, рассматривая их (если они существуют) как дополнительные влияющие величины и присваивая им очередной номер . Такой подход может привести к значительным упрощениям (см. [4]).
Примечание 2 - Считают, что эффективное число степеней свободы достаточно велико (например, более 10), чтобы предположить, что результат измерений распределен по нормальному закону.
Перечень источников неопределенности, приведенный в таблице A.1, охватывает все принципиальные источники неопределенности, но не может считаться исчерпывающим, поскольку настоящий стандарт предполагает использование различных модификаций метода калибровки, и каждая модификация может потребовать учета специфических источников неопределенности.
Таблица A.1 - Составляющие неопределенности измерения
Составляющая стандартной неопределенности | Источник неопределенности | Вклад в относительную неопределенность | |
1 | Суммарная стандартная неопределенность модуля коэффициента преобразования эталонного преобразователя в сочетании с усилителем в опорных точках |
| |
2 |
| Коэффициент усиления усилителя |
|
3 |
| Измерение отношения напряжений (часто два коррелированных измерения) |
|
4 |
| Влияние искажения формы сигнала на измерение отношения напряжений |
|
5 |
| Влияние помех и шума на измерение отношения напряжений |
|
6 |
| Влияние поперечной и угловой вибрации на выходной сигнал измерителя отношения напряжений |
|
7 |
| Влияние деформации основания на выходной сигнал измерителя отношения напряжений |
|
8 |
| Влияние условий установки (момента затяжки, фиксации кабеля, добавленного груза и т.п.) на выходной сигнал измерителя отношения напряжений |
|
9 |
| Влияние относительного движения калибруемого и эталонного преобразователей на выходной сигнал измерителя отношения напряжений |
|
10 |
| Изменение во времени модуля коэффициента преобразования эталонного преобразователя |
|
11 |
| Влияние температуры на выходной сигнал измерителя отношения напряжений |
|
12 | Измерение частоты вибрации |
| |
13 |
| Влияние нелинейности преобразователя на выходной сигнал измерителя отношения напряжений |
|
14 |
| Влияние нелинейности усилителя на выходной сигнал измерителя отношения напряжений |
|
15 |
| Влияние силы тяжести, действующей на преобразователь, на выходной сигнал измерителя отношения напряжений |
|
16 |
| Влияние магнитного поля вибростенда, действующего на преобразователь, на выходной сигнал измерителя отношения напряжений |
|
17 |
| Влияние других условий окружающей среды на выходной сигнал измерителя отношения напряжений |
|
18 |
| Остаточные влияния на модуль коэффициента преобразования калибруемого преобразователя и на его измерения (например, случайные помехи; выборочные стандартные отклонения среднего арифметического) |
|
Примечание - Если в качестве эталонного преобразователя используют преобразователь, который сам через определенные интервалы времени калибруют методом сравнения, то расчет неопределенности измерения повторяют дважды: сначала для эталонного преобразователя, а затем для калибруемого. | |||
A.2.2 Вычисление расширенной неопределенности ![]() фазового сдвига коэффициента преобразования
фазового сдвига коэффициента преобразования
Расширенную неопределенность фазового сдвига коэффициента преобразования
для частот, амплитуд и настроек усилителя (если преобразователь калибруют вместе с усилителем), при которых проводилась калибровка, вычисляют по формулам
![]() ,
, ,
 ,
,
где ![]() - фазовый сдвиг коэффициента преобразования;
- фазовый сдвиг коэффициента преобразования;
- входная (влияющая) величина;
![]() - ковариация между
- ковариация между и
(равная нулю, если входные величины независимы).
Примечание 1 - Корреляционные слагаемые часто опускают, рассматривая их (если они существуют) как дополнительные влияющие величины и присваивая им очередной номер . Такой подход может привести к значительным упрощениям (см. [4]).
Примечание 2 - Считают, что эффективное число степеней свободы достаточно велико (например, более 10), чтобы предположить, что результат измерений распределен по нормальному закону.
Перечень источников неопределенности, приведенный в таблице A.2, охватывает все принципиальные источники неопределенности, но не может считаться исчерпывающим, поскольку настоящий стандарт предполагает использование различных модификаций метода калибровки, и каждая модификация может потребовать учета специфических источников неопределенности.
Таблица A.2 - Составляющие неопределенности измерений
Составляющая стандартной неопределенности | Источник неопределенности | Вклад в неопределенность | |
1 |
| Суммарная стандартная неопределенность фазового сдвига коэффициента преобразования эталонного преобразователя в сочетании с усилителем в опорных точках |
|
2 |
| Неопределенность фазочастотной характеристики усилителя |
|
3 | Измерение фазы сигнала |
| |
4 |
| Влияние искажения формы сигнала на измерение фазы сигнала |
|
5 |
| Влияние помех и шума на измерение фазы сигнала |
|
6 |
| Влияние поперечной и угловой вибрации на выходной сигнал измерителя фазы |
|
7 |
| Влияние деформации основания на выходной сигнал измерителя фазы |
|
8 |
| Влияние условий установки (момента затяжки, фиксации кабеля, добавленного груза и т.п.) на выходной сигнал измерителя фазы |
|
9 |
| Влияние относительного движения калибруемого и эталонного преобразователей на выходной сигнал измерителя фазы |
|
10 |
| Изменение во времени фазового сдвига коэффициента преобразования эталонного преобразователя |
|
11 |
| Влияние температуры на выходной сигнал измерителя фазы |
|
12 |
| Влияние нелинейности преобразователя на выходной сигнал измерителя фазы |
|
13 |
| Влияние нелинейности усилителя на выходной сигнал измерителя фазы |
|
14 |
| Влияние силы тяжести, действующей на преобразователь, на выходной сигнал измерителя фазы |
|
15 |
| Влияние магнитного поля вибростенда, действующего на преобразователь, на выходной сигнал измерителя фазы |
|
16 |
| Влияние других условий окружающей среды на выходной сигнал измерителя фазы |
|
17 |
| Остаточные влияния на фазовый сдвиг коэффициента преобразования калибруемого преобразователя и на его измерения (например, случайные помехи; выборочные стандартные отклонения среднего арифметического) |
|
Примечание - Если в качестве эталонного преобразователя используют преобразователь, который сам через определенные интервалы времени калибруют методом сравнения, то расчет неопределенности измерения повторяют дважды: сначала для эталонного преобразователя, а затем для калибруемого. | |||
A.3 Вычисление расширенных неопределенностей во всем диапазоне частот и амплитуд
A.3.1 Вычисление относительной расширенной неопределенности ![]() модуля коэффициента преобразования
модуля коэффициента преобразования
Относительная расширенная неопределенность ![]() модуля коэффициента преобразования, вычисленная по A.2.1, справедлива только для частот, амплитуд и настроек усилителя (если преобразователь калибруют вместе с усилителем), использованных при проведении калибровки. Относительную расширенную неопределенность
модуля коэффициента преобразования, вычисленная по A.2.1, справедлива только для частот, амплитуд и настроек усилителя (если преобразователь калибруют вместе с усилителем), использованных при проведении калибровки. Относительную расширенную неопределенность ![]() модуля коэффициента преобразования для всего диапазона частот и амплитуд вычисляют по формулам
модуля коэффициента преобразования для всего диапазона частот и амплитуд вычисляют по формулам
![]() ,
, ,
 ,
,
где - коэффициент преобразования во всем диапазоне частот и амплитуд;
![]() - модуль коэффициента преобразования;
- модуль коэффициента преобразования;
- входная (влияющая) величина;
![]() - ковариация между
- ковариация между и
(равная нулю, если входные величины независимы).
Примечание 1 - Корреляционные слагаемые часто опускают, рассматривая их (если они существуют) как дополнительные влияющие величины и присваивая им очередной номер . Такой подход может привести к значительным упрощениям (см. [4]).
Примечание 2 - Считают, что эффективное число степеней свободы достаточно велико (например, более 10), чтобы предположить, что результат измерений распределен по нормальному закону.
Перечень источников неопределенности, приведенный в таблице A.3, охватывает все принципиальные источники неопределенности, но не может считаться исчерпывающим, поскольку настоящий стандарт предполагает использование различных модификаций метода калибровки, и каждая модификация может потребовать учета специфических источников неопределенности.
Таблица A.3 - Составляющие неопределенности измерений
Составляющая стандартной неопределенности | Источник неопределенности | Вклад в неопределенность | |
1 | Неопределенность модуля коэффициента преобразования для частот, амплитуд и настроек усилителя, при которых проводилась калибровка по А.2.1 |
| |
2 |
| Отклонение коэффициента усиления от номинального при разных настройках усилителя |
|
3 |
| Отклонение амплитудно-частотной характеристики усилителя от номинальной в диапазоне частот преобразователя |
|
4 |
| Отклонение модуля коэффициента преобразования от номинального в диапазоне частот преобразователя |
|
5 |
| Нелинейность усилителя |
|
6 |
| Нелинейность преобразователя |
|
7 |
| Нестабильность во времени коэффициента усиления усилителя и выходного импеданса преобразователя |
|
8 |
| Нестабильность во времени модуля коэффициента преобразования |
|
9 |
| Влияние изменения условий внешней среды на коэффициент усиления усилителя |
|
10 |
| Влияние изменения условий внешней среды на модуль коэффициента преобразования |
|
11 |
| Дополнительное влияние условий установки (момента затяжки, фиксации кабеля, добавленного груза и т.п.) на модуль коэффициента преобразования |
|
A.3.2 Вычисление расширенной неопределенности ![]() фазового сдвига коэффициента преобразования
фазового сдвига коэффициента преобразования
Расширенная неопределенность ![]() фазового сдвига коэффициента преобразования, вычисленная по A.2.2, справедлива только для частот, амплитуд и настроек усилителя (если преобразователь калибруют вместе с усилителем), использованных при проведении калибровки. Расширенную неопределенность
фазового сдвига коэффициента преобразования, вычисленная по A.2.2, справедлива только для частот, амплитуд и настроек усилителя (если преобразователь калибруют вместе с усилителем), использованных при проведении калибровки. Расширенную неопределенность ![]() фазового сдвига
фазового сдвига коэффициента преобразования
для всего диапазона частот и амплитуд вычисляют по формулам
![]() ,
, ,
 ,
,
где ![]() - фазовый сдвиг коэффициента преобразования;
- фазовый сдвиг коэффициента преобразования;
- входная (влияющая) величина;
![]() - ковариация между
- ковариация между и
(равная нулю, если входные величины независимы).
Примечание 1 - Корреляционные слагаемые часто опускают, рассматривая их (если они существуют) как дополнительные влияющие величины и присваивая им очередной номер . Такой подход может привести к значительным упрощениям (см. [4]).
Примечание 2 - Считают, что эффективное число степеней свободы достаточно велико (например, более 10), чтобы предположить, что результат измерений распределен по нормальному закону.
Перечень источников неопределенности, приведенный в таблице A.4, охватывает все принципиальные источники неопределенности, но не может считаться исчерпывающим, поскольку настоящий стандарт предполагает использование различных модификаций метода калибровки, и каждая модификация может потребовать учета специфических источников неопределенности.
Таблица A.4
Составляющая стандартной неопределенности | Источник неопределенности | Вклад в неопределенность | |
1 |
| Неопределенность фазового сдвига коэффициента преобразования для частот, амплитуд и настроек усилителя, при которых проводилась калибровка по А.2.2 |
|
2 |
| Отклонение коэффициента усиления от номинального при разных настройках усилителя |
|
3 |
| Отклонение фазочастотной характеристики усилителя от номинальной в диапазоне частот преобразователя |
|
4 |
| Отклонение сдвига фаз коэффициента преобразования от номинального в диапазоне частот преобразователя |
|
5 |
| Влияние амплитуды на фазочастотную характеристику усилителя |
|
6 |
| Влияние амплитуды на фазовый сдвиг коэффициента преобразования |
|
7 |
| Нестабильность во времени фазочастотной характеристики усилителя и влияние на фазочастотную характеристику выходного импеданса преобразователя |
|
8 |
| Нестабильность во времени фазового сдвига коэффициента преобразования |
|
9 |
| Влияние изменения условий внешней среды на фазочастотную характеристику усилителя |
|
10 |
| Влияние изменения условий внешней среды на фазовый сдвиг коэффициента преобразования |
|
11 |
| Дополнительное влияние условий установки (момента затяжки, фиксации кабеля, добавленного груза и т.п.) на фазовый сдвиг коэффициента преобразования |
|
Приложение B
(обязательное)
Определение знака электрического сигнала на выходе преобразователя
B.1 Движение твердого тела
Твердое тело, не имеющее связей, ограничивающих его движение в каком-либо из направлений, способно совершать колебания с шестью степенями свободы (три степени свободы соответствуют поступательным движениям во взаимно-перпендикулярных направлениях, еще три - угловым).
B.2 Системы координат
Движение твердого тела определяют в системе координат. Для описания поступательных движений удобна декартова система координат (,
,
).
Угловое движение может быть описано в той же системе координат с добавлением углов поворота тела. Это создает полярную систему координат, в которой положительное направление угла поворота определяют по правилу правой руки (если большой палец направить вдоль соответствующей оси координат, то сжатые в кулак пальцы покажут положительное направление вращения вокруг этой оси).
B.3 Типы преобразователей
Существует несколько типов преобразователей. Среди них наиболее часто используемыми являются преобразователи ускорения (акселерометры), преобразователи скорости (велосиметры), преобразователи перемещения (бесконтактные датчики зазора).
B.4 Единицы измерений
Амплитуды сигналов вибрации выражают в абсолютных или угловых единицах. Единицы ускорения, скорости и перемещения (длины) - метр в секунду в квадрате (м/с), метр в секунду (м/с) и метр (м) соответственно; единицы фазового угла - градус или радиан (рад).
Единицы углового ускорения, угловой скорости и углового перемещения (плоского угла) - радиан в секунду в квадрате (рад/с), радиан в секунду (рад/с) и радиан (рад) соответственно; единица для угла поворота - градус или радиан (рад).
B.5 Определение системы координат
Систему координат определяют относительно преобразователя. Одну из осей системы направляют параллельно главной оси чувствительности преобразователя, а за ее положительное направление выбирают направление от вибрирующей поверхности, на которую преобразователь установлен, в сторону преобразователя.
B.6 Определение полярности или знака движения
Поступательное движение (ускорение, скорость или перемещение) имеет положительный знак, если движение происходит в положительном направлении оси системы координат, параллельной главной оси чувствительности преобразователя.
Угловое движение имеет положительный знак, если вращение происходит в положительном направлении угла поворота полярной системы координат.
Данное определение не зависит от способа установки преобразователя (контактный или бесконтактный).
B.7 Определение знака и фазового сдвига коэффициента преобразования
Преобразователь преобразует входную физическую величину в выходной сигнал (как правило, электрический). Выходной электрический сигнал может представлять собой электрическое напряжение, силу тока или заряд.
Коэффициент преобразования определяют как отношение выходного электрического сигнала к измеряемой величине (характеристике движения). При этом при определении знака и фазового сдвига коэффициента преобразования учитывают введенные в настоящем приложении положительные направления осей системы координат, движения и способ преобразования механической величины в электрический сигнал.
Приложение C
(справочное)
Номограмма зависимостей между ускорением, скоростью и перемещением
На рисунке C.1 приведена номограмма зависимостей между амплитудами (среднеквадратичными, пиковыми значениями или значениями размаха) ускорения, скорости и перемещения на дискретных частотах. Если для описания физических величин, характеризующих движение, используют разные параметры, то необходимо применять соответствующие коэффициенты преобразования (например, при переходе от среднеквадратичного к пиковому значению,
при переходе от среднеквадратичного значения к размаху). По двум известным параметрам (частоте и значению одной из величин, характеризующих движение) могут быть найдены значения двух других величин, характеризующих движение.
Например, если известны частота и амплитуда ускорения, то по номограмме на соответствующих шкалах можно считать амплитуды скорости и перемещения.
|
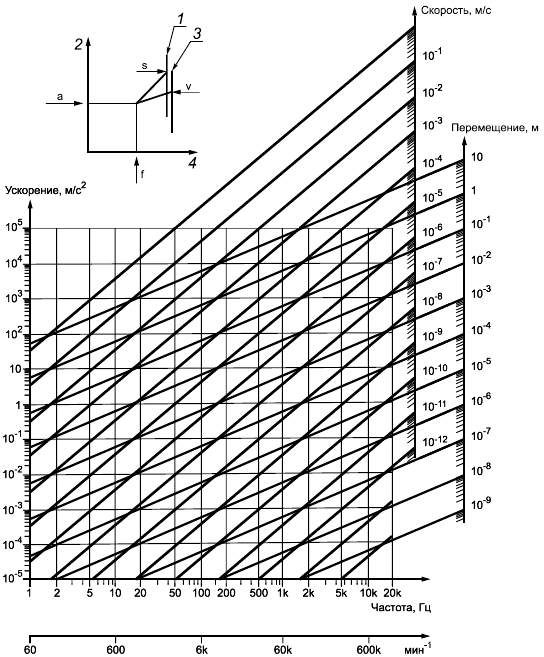
1 - перемещение; 2 - ускорение; 3 - скорость; 4 - частота
Рисунок C.1 - Номограмма зависимости между амплитудами перемещения, скорости и ускорения
Приложение D
(справочное)
Пример расчета неопределенности измерения
D.1 Общие положения
С целью облегчить применение основных положений настоящего стандарта в настоящем приложении приведен пример калибровки на испытательной установке, показанной на рисунке 1.
Схема процесса измерений представлена на рисунке D.1.
|
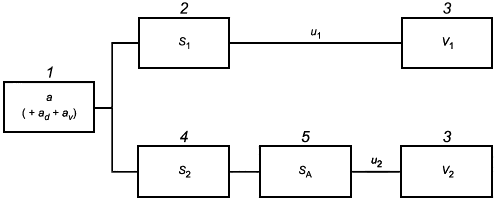
1 - вибростенд; 2 - эталонный преобразователь (акселерометр); 3 - вольтметр; 4 - калибруемый преобразователь (акселерометр); 5 - усилитель
Рисунок D.1 - Схема процесса измерений
D.2 Обозначения
В настоящем приложении применены следующие обозначения:
- ускорение в направлении основного движения;
- ускорение в поперечном направлении;
- искажение формы сигнала ускорения в направлении основного движения;
- модуль коэффициента преобразования эталонного акселерометра (совместно с усилителем);
- напряжение на выходе эталонного акселерометра;
- показание вольтметра (измерение среднеквадратичного значения электрического напряжения и ускорения эталонного акселерометра);
- модуль коэффициента преобразования калибруемого акселерометра;
- коэффициент усиления усилителя;
- напряжение на выходе усилителя (калибруемого акселерометра);
- показание вольтметра в цепи калибруемого акселерометра.
D.3 Коэффициент преобразования
На входе калибруемого акселерометра действует ускорение .
Калибрируемый акселерометр вместе с усилителем образуют калибруемую систему. Выходной сигнал этой системы (цепи) сравнивают с выходным сигналом цепи эталонного акселерометра, также состоящей из эталонного акселерометра и усилителя.
В результате последовательных измерений определяют отношение амплитуды напряжения
на выходе цепи калибруемого акселерометра к амплитуде напряжения
на выходе цепи эталонного акселерометра. Чтобы учесть в расчетах дрейф показаний приборов,
измеряют до и после измерения
. Искажения формы сигнала ускорения
на результат вычисления коэффициента преобразования калибруемого акселерометра влияют только в том случае, если формы амплитудно-частотных характеристик двух цепей измерений (в первую очередь, в области спада этих характеристик) различны. В противном случае искажения не будут влиять на окончательный результат калибровки. В таблице D.1 предполагается, что эталонный акселерометр содержит в себе кварцевый пьезоэлемент, что исключает наличие области спада амплитудно-частотной характеристики, а калибрируемый акселерометр имеет керамический пьезоэлемент из титаната-цирконата свинца (ЦТС), для которого характерен спад амплитудно-частотной характеристики 2% на декаду, что может быть выражено формулой
 .
.
Среднеквадратичное значение напряжения на выходе цепи усилителя калибруемого преобразователя может быть выражено формулой
![]() .
.
Среднеквадратичное значение ускорения можно получить по результату измерения напряжения на выходе цепи эталонного акселерометра по формуле
![]() .
.
Подставляя полученное значение в формулу для
, можно получить формулу для коэффициента преобразования калибруемого преобразователя:
![]() .
.
Отношение напряжений определяется как
![]() .
.
В предположении, что среднеквадратичное значение ускорения при измерении напряжений на выходе цепей калибруемого и эталонного акселерометров остается постоянным, справедливо соотношение
![]() .
.
Окончательная формула для расчета имеет вид
![]() .
.
D.4 Расчет неопределенности измерения
Согласно [4] влияние величин, не включенных в уравнение измерений, можно учесть введением дополнительных множителей по формуле
![]() ,
,
где множители от до
описывают влияние на результат оценки
влияющих величин.
Каждая влияющая величина имеет свой вид распределения (нормальное, равномерное и т.д.), единичное среднее значение и может быть представлена в виде
![]() ,
,
где -
-я составляющая погрешности, обусловленная влияющей величиной с соответствующим распределением вероятностей.
Составляющая погрешности в ряде случаев может быть описана простым распределением (например, прямоугольным) с нулевым средним.
Каждая влияющая величина отражается на результате измерений через соответствующие изменения результатов измерений
и
.
Для каждой влияющей величины следует учитывать корреляции между составляющими ее погрешностями. Если на конечный результат измерений оказывают влияние разные статистически зависимые факторы, то эти факторы рекомендуется объединять в одну влияющую величину, что позволит считать влияющие величины некоррелированными между собой.
В предположении малости погрешности членами второго и последующего порядков в разложении функции в правой части уравнения измерений в ряд Тейлора можно пренебречь.
Если отсутствуют сведения о наличии сильной статистической связи между выходными переменными, то корреляционные члены в выражении для стандартной неопределенности согласно [4] можно принять равными нулю.
Если корреляция между величинами, влияющими на результат измерений , неизвестна, то следует учитывать следующее соотношение [3]:
![]() ,
,
где и
![]() - стандартные неопределенности коррелированных величин (стандартные отклонения для приближенно нормальных распределений);
- стандартные неопределенности коррелированных величин (стандартные отклонения для приближенно нормальных распределений);
![]() - суммарная стандартная неопределенность для статистически независимых величин.
- суммарная стандартная неопределенность для статистически независимых величин.
Бюджет неопределенности основан на вычислении относительных неопределенностей влияющих величин. В случае отсутствия корреляций относительную суммарную стандартную неопределенность ![]() для коэффициента преобразования калибруемого акселерометра рассчитывают по формуле
для коэффициента преобразования калибруемого акселерометра рассчитывают по формуле
 ,
,
где - коэффициенты чувствительности, определяемые как частные производные функции измерений (правой части уравнения измерений) по соответствующей входной переменной.
Уравнение измерений имеет вид обратно пропорциональной зависимости относительно одной влияющей величины и линейно относительно остальных влияющих величин, поэтому коэффициенты чувствительности принимают значения, соответственно, минус единица и плюс единица. Поскольку при определении относительной суммарной стандартной неопределенности все коэффициенты чувствительности возводят в квадрат, то их знаки влияние на результат не оказывают.
Численный пример расчета относительной суммарной стандартной неопределенности приведен в таблице D.1.
Таблица D.1 - Пример бюджета неопределенности для калибровки пьезоэлектрического акселерометра в опорной точке (на частоте 160 Гц с ускорением 100 м/с)
Влияющая величина | Расширенная неопределенность или границы погрешности, % | Модель распределения вероятности | Коэффициент для стандартной неопреде- | Коэффи- | Относи- | |
Обозна- | Описание | |||||
Калибровка эталонного преобразователя | 0,5 | Нормальное ( | 1 | 0,25 | ||
Дрейф | 0,15 | Прямоугольное | 1 | 0,087 | ||
| Коэффициент усиления усилителя (документация) | 0,25 | Прямоугольное | -1 | 0,14 | |
Отношение напряжений (документация) | 0,2 | Прямоугольное | 1 | 0,12 | ||
| Изменение температуры; чувствительность эталонного преобразователя, (23±3)°С - менее 0,02%/°С; | 0,36 | Прямоугольное | 1 | 0,21 | |
| Изменение сигнала возбуждения (документация) | 0,2 | Прямоугольное | 1 | 0,12 | |
| Условия монтажа калибруемого преобразователя (момент затяжки, кабель, разъем) (документация) | 0,05 | Прямоугольное | 1 | 0,029 | |
| Нелинейные искажения [типичная разность в частотных характеристиках эталонного (кварц) и калибруемого (ЦТС) преобразователей - 2% на декаду; уровень доминирующей 3-й гармоники - менее 5%] | 0,0024 см. примечание 2 | Прямоугольное | 1 | 0,0014 | |
| Поперечное ускорение [коэффициент поперечных составляющих вибростенда - не более 10%; |
| Специального вида |
| 1 | 0,12 |
| Деформация основания (оценка) | 0,05 | Прямоугольное | 1 | 0,029 | |
| Относительное движение между преобразователями (оценка) | 0,05 | Прямоугольное | 1 | 0,029 | |
| Нелинейность преобразователей (оценка) | 0,03 | Прямоугольное | 1 | 0,017 | |
| Нелинейность усилителей (оценка) | 0,03 | Прямоугольное | 1 | 0,017 | |
| Поле силы тяжести (оценка) | 0,00 | Прямоугольное | 1 | 0,00 | |
| Магнитное поле (оценка) | 0,03 | Прямоугольное | 1 | 0,017 | |
| Другие условия окружающей среды (оценка) | 0,03 | Прямоугольное | 1 | 0,017 | |
| Остаточные влияния (случайные отклонения в повторных измерениях) (оценка) | 0,03 | Прямоугольное | 1 | 0,017 | |
| Суммарная стандартная неопределенность коэффициента преобразования | - | - | - | - | 0,42 |
Примечание 1 - Источники неопределенности метода указаны с их оценками. На основе предполагаемого закона распределения получено стандартное отклонение соответствующей влияющей величины (последний столбец таблицы). Примечание 2 - В случае нелинейных искажений (наличие 3-й гармоники) выходные сигналы двух измерительных цепей могут быть описаны формулами Примечание 3 - Если углы между направлением поперечных колебаний вибростенда к направлениям, в которых коэффициенты поперечного преобразования акселерометров максимальны, неизвестны, то интегрирование в пределах 360° позволяет получить дисперсию влияющей величины по формуле
В предположении, что все три указанных угла имеют равномерное распределение, для получения стандартного отклонения
| ||||||
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов (документов) межгосударственным стандартам
Таблица ДА.1
Обозначение международного стандарта, документа | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
ISO 266 | - | *, |
________________
| ||
ISO 2041 | - | *, |
________________
| ||
ISO 16063-1:1998 | IDT | ГОСТ ISO 16063-1-2013 "Вибрация. Методы калибровки датчиков вибрации и удара. Часть 1. Общие положения" |
ISO 16063-11:1999 | IDT | ГОСТ ISO 16063-11-2009* "Вибрация. Методы калибровки датчиков вибрации и удара. Часть 11. Первичная вибрационная калибровка методами лазерной интерферометрии" |
________________ * Вероятно, ошибка оригинала. Следует читать ГОСТ ISO 16063-11-2013. - . | ||
GUM:1995 | - | * |
* Соответствующий межгосударственный стандарт отсутствует. До его принятия рекомендуется использовать перевод данного международного стандарта (документа) на русский язык. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT - идентичные стандарты. | ||
Библиография
[1] | ISO 5348, Mechanical vibration and shock - Mechanical mounting of accelerometers |
[2] | ISO/IEC Guide 99, International vocabulary of metrology - Basic and general concepts and associated terms (VIM) |
[3] | Expression of the uncertainty of measurement in calibration. Publication Reference EA-4/02, European Co-operation for Accreditation, 1999 |
[4] | Martens, H.-J. von and Rogazewski P. Representation and transfer of the units of vibration quantities in the GDR. Bulletin OIML, No.108, 1987, pp.26-37 |
[5] | Martens H.-J. von. Evaluation of interferometric vibration measurements, SPIE, 4072, 2000, pp.82-101 |
УДК 620.178.5.05:006.354 | МКС 17.160 | IDT |
Ключевые слова: вибрация, удар, преобразователи, калибровка, метод сравнения, эталонный преобразователь, неопределенность | ||
Электронный текст документа
и сверен по:
, 2019
{kind=link}