ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
ГОСТР
60.6.3.7—
2023
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
МЕТОДЫ ИСПЫТАНИЙ СЕРВИСНЫХ МОБИЛЬНЫХ РОБОТОВ ДЛЯ РАБОТЫ В ЭКСТРЕМАЛЬНЫХ УСЛОВИЯХ
Проходимость. Преодоление разнонаправленных подъемов и спусков
Издание официальное
Москва Российский институт стандартизации 2023
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным автономным научным учреждением «Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики» (ЦНИИ РТК) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 «Робототехника»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 31 августа 2023 г. № 778-ст
4 Настоящий стандарт является модифицированным по отношению к стандарту АСТМ Е2827/ Е2827М—20 «Стандартный метод испытаний для оценки проходимости роботов для работы в экстремальных условиях на поверхности с разнонаправленными подъемами и спусками» (ASTM Е2827/ Е2827М—20 «Standard Test Method for Evaluating Response Robot Mobility Using Crossing Pitch/Roll Ramp Terrains», MOD) путем внесения технических отклонений, объяснение которых приведено во введении к настоящему стандарту.
Наименование настоящего стандарта изменено относительно наименования указанного стандарта для приведения в соответствие с ГОСТ Р 1.5—2012 (пункт 3.5) и для увязки с наименованиями, принятыми в существующем комплексе национальных стандартов Российской Федерации
5 ВЗАМЕН ГОСТ Р 60.6.3.7—2019
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
© Оформление. ФГБУ «Институт стандартизации», 2023
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
Содержание
1 Область применения
2 Термины и определения
3 Краткое описание метода испытаний
4 Значение и использование метода испытаний
5 Требования к оборудованию испытательного стенда
6 Требования безопасности
7 Порядок проведения испытаний
8 Расчет и интерпретация результатов
9 Требования к отчетности
10 Погрешность метода испытаний
Введение
Требования стандартов комплекса ГОСТ Р 60 распространяются на роботы и робототехнические устройства. Целью стандартов является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов, узлов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: «Общие положения, основные понятия, термины и определения», «Технические и эксплуатационные характеристики», «Безопасность», «Виды и методы испытаний», «Механические интерфейсы», «Электрические интерфейсы», «Коммуникационные интерфейсы», «Методы моделирования и программирования», «Методы построения траектории движения (навигация)», «Конструктивные элементы». Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации: промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам, сервисным мобильным роботам, а также к морским робототехническим комплексам.
Настоящий стандарт относится к тематической группе «Виды и методы испытаний» и распространяется на сервисные мобильные роботы, предназначенные для работы в экстремальных условиях. Настоящий стандарт определяет метод испытаний проходимости роботов при движении по сложной поверхности с разнонаправленными подъемами и спусками. Данный метод испытаний по преодолению разнонаправленных подъемов и спусков в ограниченном пространстве является частью комплекса испытаний роботов по проходимости.
Настоящий стандарт является модифицированным по отношению к АСТМ Е2827/Е2827М—20, разработанному Техническим комитетом Е54 ASTM International «Прикладные системы для национальной безопасности» согласно принципам стандартизации, установленным в Решении о принципах разработки международных стандартов, руководств и рекомендаций Комитета по техническим барьерам в торговле Всемирной торговой организации, для приведения его в соответствие с требованиями основополагающих национальных и межгосударственных стандартов.
В настоящий стандарт внесены следующие технические отклонения по отношению к стандарту АСТМ Е2827/Е2827М—20:
- исключены примечания и сноски примененного стандарта, которые нецелесообразно применять в российской национальной стандартизации в связи с их содержанием, имеющим справочный характер и относящимся к системе стандартизации США;
- значения физических величин указаны только в Международной системе единиц (СИ), используемой в российской национальной стандартизации в соответствии с требованиями ГОСТ 8.417, в то время как в примененном стандарте значения измерений указаны как в системе единиц СИ, так и в американских единицах (дюйм-фут); в связи с чем пункт 1.5 примененного стандарта об использовании двух систем единиц измерения не включен в настоящий стандарт;
- исключен пункт 1.7 примененного стандарта, т. к. его содержание приведено во введении;
- исключен раздел 2 «Нормативные ссылки» с последующим изменением нумерации разделов, т. к. ссылки на единственный стандарт из раздела 2.1 примененного стандарта присутствуют только в разделе «Термины и определения» и согласно ГОСТ 1.5 не считаются нормативными, а подраздел 2.2 примененного стандарта содержит ссылки на документы системы стандартизации США, которые нецелесообразно применять в национальной стандартизации;
- в соответствии с ГОСТ Р 1.7, ГОСТ 1.3, ГОСТ Р 1.5 и ГОСТ 1.5 включен раздел 3 «Термины и определения», в котором приведены определения терминов, примененных в настоящем стандарте, вместо простого перечисления терминов в пунктах 3.1—3.3 раздела 3 «Терминология» примененного стандарта;
- терминологические статьи расположены в алфавитном порядке букв русского языка для обеспечения соответствия требованиям ГОСТ 1.5;
- в раздел 6 добавлен рисунок 7, поясняющий размещение наклонных элементов на испытательном стенде, соответственно нумерация последующих рисунков увеличена на единицу;
и сключена нумерация пунктов 10.1 и 11.1 примененного стандарта в соответствии с требованиями ГОСТ 1.5—2001, пункт 4.2.3;
- ключевые слова приведены в библиографических данных в соответствии с ГОСТ 1.5 вместо раздела 12 «Ключевые слова» в примененном стандарте;
- изменены отдельные фразы (слова, значения показателей, ссылок). Все дополнения и изменения в тексте стандарта выделены курсивом.
ГОСТ Р 60.6.3.7—2023
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
МЕТОДЫ ИСПЫТАНИЙ СЕРВИСНЫХ МОБИЛЬНЫХ РОБОТОВ ДЛЯ РАБОТЫ В ЭКСТРЕМАЛЬНЫХ УСЛОВИЯХ
Проходимость. Преодоление разнонаправленных подъемов и спусков
Robots and robotic devices. Test methods for service mobile emergency response robots. Mobility. Passing crossing pitch/roll ramps
Дата введения — 2024—01—01
1 Область применения
1.1 Настоящий стандарт распространяется на дистанционно управляемых наземных роботов, работающих в сложных, неструктурированных и часто опасных условиях, устанавливает метод испытаний и определяет испытательное оборудование, порядок проведения испытаний и показатели для количественной оценки возможностей робота по преодолению сложной поверхности с разнонаправленными подъемами и спусками. Данный метод испытаний является одним из ряда испытаний, характеризующих такое эксплуатационное качество мобильных роботов, как проходимость.
1.2 Робототехнический комплекс для работы в экстремальных условиях предусматривает присутствие удаленно расположенного оператора, управляющего выполнением большинства функций, поэтому в состав комплекса следует включить бортовую камеру на роботе и дисплей у оператора. Данный метод испытаний может быть использован для оценки дистанционно управляемых или автономных действий роботов, обеспечивающих повышение эффективности или производительности мобильных роботов с дистанционным управлением.
1.3 Разные категории пользователей могут устанавливать собственные количественные значения параметров, определенных в настоящем стандарте, в зависимости от конкретных условий, в которых будет эксплуатироваться робот.
1.4 Испытания согласно данному методу допускается проводить в любом месте, где можно воспроизвести необходимые условия внешней среды и установить испытательное оборудование.
1.5 Требования настоящего стандарта не распространяются на весь спектр проблем безопасности, связанных с его применением, при их наличии. Пользователи настоящего стандарта отвечают за разработку необходимых мер безопасности и охраны здоровья, а также за определение применимости законодательных ограничений до использования настоящего стандарта.
2 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
2.7
автономный режим работы: Режим работы, при котором мобильный робот получает задание от оператора или внешней системы управления, с которой взаимодействует, и выполняет его без дальнейшего взаимодействия с оператором или внешней системой.
[ГОСТ Р 60.6.0.1—2021, статья 2]
Издание официальное
2.2
(испытательная) попытка [(test) repetition)]: Цикл от начала до завершения выполнения роботом задания, установленного в методе испытаний.
[ГОСТ Р 60.6.3.1—2019, статья 2.8]
2.3
испытательный комплект (test suite): Разработанная совокупность методов и технических средств испытаний, которые совместно используются для оценки рабочих характеристик или определения соответствия техническим требованиям конкретной подсистемы или функциональных возможностей робота для работы в экстремальных условиях.
[ГОСТ Р 60.6.3.1—2019, статья 2.9]
2.4 комплекс испытаний (trial): Совокупность попыток, которые должен выполнить испытуемый робот в соответствии с конкретным методом испытаний, чтобы получить результаты, соответствующие требуемой статистической достоверности.
2.5
оператор [operator]: Лицо, уполномоченное запускать, контролировать и останавливать выполнение заданной операции.
[ГОСТ Р 60.0.0.4—2023, статья 3.11]
2.6
операторский пульт управления; ОПУ (operator control unit; OCU): Устройство, используемое оператором для телеуправления роботом.
[ГОСТ Р 60.6.3.10—2019, статья 3.7]
2.7
протокол испытаний (test form): Документ, содержащий необходимые сведения об объекте испытаний, применяемых методах, средствах и условиях испытаний, результаты испытаний, а также заключение по результатам испытаний, оформленный в установленном порядке.
[ГОСТ 16504—81, статья 24]
2.8
робот (robot): Программируемый исполнительный механизм, обладающий определенным уровнем автономности и предназначенный для выполнения перемещения, манипулирования или позиционирования.
Примечание 1 — В состав робота входит система управления.
Примечание 2 — Примерами конструктивных разновидностей роботов являются манипулятор, мобильная платформа и носимый робот.
[ГОСТ Р 60.0.0.4—2023, статья 3.1]
2.9
робот для работы в экстремальных условиях (робот для аварийных работ) [emergency response robot (response robot)]-. Робот, предназначенный для выполнения оперативных задач в различных рабочих режимах с целью оказания помощи оператору при выполнении работ в экстремальных условиях и опасных средах.
Примечание — К некоторым основным характеристикам таких роботов относятся: дистанционное управление с безопасного удаленного расстояния, эксплуатация на рабочих скоростях, способность работать в сложных условиях, достаточная защищенность от опасной среды, надежность и возможность обслуживания в полевых условиях, долговечность и экономическая эффективность, а также оснащенность средствами обеспечения безопасности.
[ГОСТ Р 60.6.3.1—2019, статья 2.33]
2.10
руководитель (испытаний) [(test) administrator]: Лицо, осуществляющее непосредственное руководство проведением испытаний.
[ГОСТ Р 60.6.3.1—2019, статья 2.34]
2.11
(тестовое) задание [(testing) task]: Последовательность действий, вполне определенных и конкретизированных в соответствии с заданным показателем или набором показателей по отношению к испытуемым роботам и операторам и предназначенных для оценки возможностей робота.
[ГОСТ Р 60.6.3.1—2019, статья 2.38]
2.12 четвертной элемент наклонной поверхности (quarter-ramp terrain element)]: Элемент с поверхностью, расположенной с наклоном под углом 15°, горизонтальная проекция которого имеет форму квадрата со стороной, равной 1/4 ширины испытательного стенда.
3 Краткое описание метода испытаний
3.1 Испытания согласно данному методу выполняет оператор, находящийся на удаленном рабочем месте вне визуального и звукового контактов с испытательным стендом и роботом. Необходимо, чтобы робот перемещался по испытательному стенду, следуя по одному из двух установленных маршрутов на поверхности с разнонаправленными подъемами и спусками. В процессе движения робот должен преодолевать подъемы и спуски при переменном сцеплении с поверхностью и осуществлять повороты на неровной поверхности при наличии или отсутствии ограничивающих конструкций.
3.2 Маршрут движения в форме восьмерки, который робот проходит прямым ходом, предусматривает перемещение по поверхности с разнонаправленными подъемами и спусками, делая правые и левые повороты для обхода препятствий. Данный маршрут позволяет испытывать робот при перемещении на большие расстояния на сравнительно небольшом испытательном стенде. Маршрут движения восьмеркой показан белыми линиями со стрелками на рисунках 1 и 2.
Стартовая/финишная
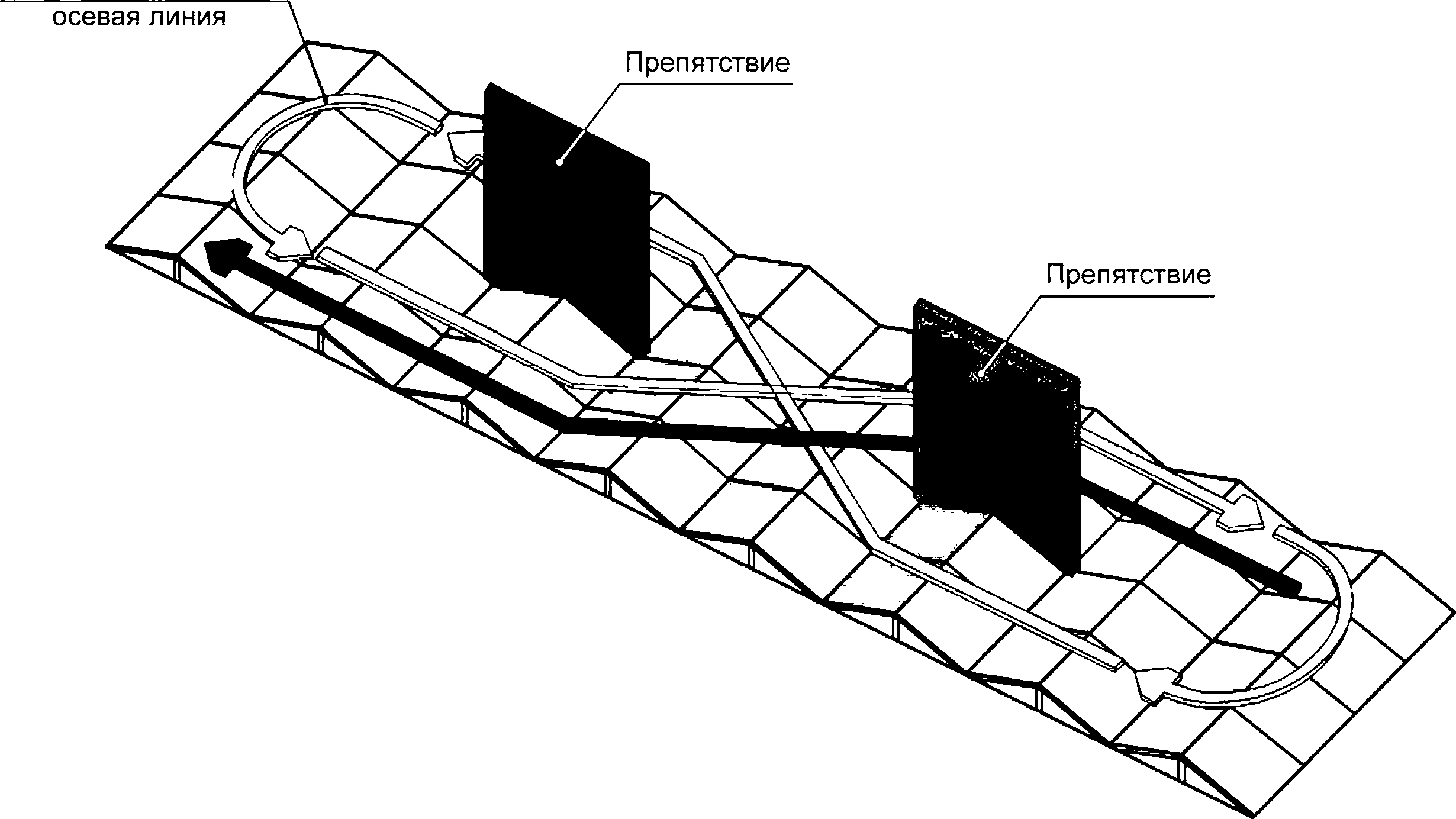
Примечание — Попытки начинаются и заканчиваются при пересечении какой-либо частью робота стартовой/финишной осевой линии. Начальная позиция может быть расположена на любом конце испытательного стенда.
Рисунок 1 — Общий вид испытательного стенда с поверхностью в виде разнонаправленных подъемов и спусков
Ближний участок
Расстояние за одну попытку
Дальний участок
Стартовая/финишная осевая линия
Препятствие
Препятствие
Прямой ход
Прямой ход
Рисунок 2 — Вид сверху на маршрут движения восьмеркой (прямым ходом), определяемый препятствиями
3.3 Зигзагообразный маршрут движения, который робот проходит прямым и задним ходом, предусматривает перемещение робота по поверхности с разнонаправленными подъемами и спусками с выполнением правых и левых поворотов для обхода препятствий. Данный маршрут позволяет испытывать робот при движении в ограниченном пространстве. Движение по маршруту, обозначенному белой линией, робот выполняет прямым ходом, а по маршруту, обозначенному черной линией, — задним ходом (см. рисунки 1 и 3).
Расстояние за одну попытку
Робот должен полностью пересечь плоскость, перпендикуляр
ную концу препятствия

Рисунок 3 — Вид сверху на зигзагообразный маршрут (прямым и задним ходом), определяемый препятствиями
3.4 Робот начинает движение с одного или другого конца испытательного стенда, представляющего собой искусственную местность с разнонаправленными подъемами и спусками заданного масштаба. Робот перемещается либо по маршруту движения восьмеркой (прямым ходом), либо по зигзагообразному маршруту (прямым и задним ходом), обходя два препятствия. Попытку прохода по маршруту движения восьмеркой (прямым ходом) считают выполненной, когда робот пересекает стартовую/финишную осевую линию испытательного стенда без ошибок, пройдя приблизительно по маршруту, обозначенному белой линией. Попытку прохода по зигзагообразному маршруту (прямым/задним ходом) считают выполненной, когда робот пересекает стартовую/финишную осевую линию испытательного стенда без ошибок, пройдя приблизительно по маршрутам, обозначенным белой и черной линиями.
3.5 В процессе проведения испытаний фиксируют приведенные в 3.5.1—3.5.3 виды ошибок, в результате которых попытку признают неудачной.
3.5.1 Любой контакт робота с испытательным стендом, после которого требуется наладка или ремонт для возврата испытательного стенда в исходное состояние.
3.5.2 Любое визуальное, звуковое или физическое взаимодействие, которое помогает роботу или удаленно расположенному оператору.
3.5.3 Выезд робота за пределы испытательного стенда во время выполнения попытки.
3.6 Для того чтобы продемонстрировать надежность робота или убедиться в квалификации оператора дистанционного управления, в ходе испытаний необходимо выполнить достаточное число результативных попыток. Продолжительность испытаний, состоящих из 10—30 попыток, составляет от 10 до 30 мин. При оценке показателей робота необходимо, чтобы было выделено достаточное количество времени для проведения полного объема испытаний с участием опытного оператора. При оценке квалификации оператора необходимо ограничить время проведения испытаний так, чтобы начинающие и опытные операторы испытывали одинаковую усталость.
3.7 При оценке результатов испытаний необходимо учитывать три показателя, которые рассматривают в следующем порядке значимости: оценка завершенности, статистическая надежность результатов и эффективность. Результаты прохождения маршрута движения восьмеркой (прямым ходом) и зигзагообразного маршрута (прямым/задним ходом) несопоставимы, поскольку они характеризуют разные возможности роботов. Результаты испытаний на испытательных стендах разного масштаба также являются несопоставимыми, так как роботы перемещаются по проходам разной ширины и на разные расстояния.
4 Значение и использование метода испытаний
4.1 Данный метод испытаний входит в комплекс связанных методов испытаний, обеспечивающих воспроизводимые оценки проходимости роботов и квалификации операторов дистанционного управления. Данный испытательный стенд с разнонаправленными подъемами и спусками позволяет оценить проходимость робота, его систему передвижения и подвеску, обеспечивающие надлежащую силу сцепления с поверхностью, тенденции к опрокидыванию робота, поддержание роботом равновесия при движении по сложной поверхности (при необходимости), вариабельность формы шасси (если применимо), а также ситуационную осведомленность оператора. Таким образом, данный испытательный стенд можно использовать для имитации рельефа умеренной сложности на открытых территориях или завалов в закрытых помещениях.
4.2 Масштаб испытательного стенда допускается изменять для имитации разных ограничений, характерных для предполагаемой среды применения робота по назначению. Например, испытательный стенд с ограничивающими стенами может иметь размеры, соответствующие ширине проходов в салонах автобусов, поездов или самолетов, жилым помещениям с коридорами и дверными проемами, относительно свободному пространству парковочных площадок с достаточно большими расстояниями между автомобилями, а также открытой местности.
4.3 Оборудование испытательного стенда является не только рентабельным, но и простым в изготовлении, что позволяет его широко тиражировать. Проведение испытаний согласно установленному методу также не представляет особых трудностей. Это облегчает сравнение результатов испытаний, проведенных в разных местах и в разное время для определения наиболее совершенных в своем классе роботов и операторов.
4.4 Данный метод испытаний используют для оценки основных возможностей роботов в контролируемых условиях окружающей среды. Движение по поверхности с разнонаправленными подъемами и спусками может быть включено в программу обучения операторов с целью оценки снижения показателей вследствие неконтролируемых изменений освещенности, погодных условий, радиосвязи, точности геопозиционирования и т. д.
4.5 Данный метод испытаний используют для формирования компромиссных оценок возможностей роботов, принятия обоснованных решений при закупках роботов и для проверки рабочих характеристик роботов при проведении приемочных испытаний. В результате спецификации требований ожидания пользователей будут приведены в соответствие с существующими ограничениями технических возможностей.
4.6 Данный метод испытаний используют для целенаправленного обучения операторов в качестве воспроизводимого практического задания или в качестве задания, включенного в программы обучения. Полученные в результате проведенных испытаний показатели квалификации операторов дистанционного управления позволяют отслеживать изменения навыков операторов с течением времени, а также сравнивать результаты работы в разных подразделениях, регионах или со средними показателями по стране.
4.7 Данный метод испытаний используют для разработки технических инноваций, демонстрации прорывных возможностей и оценки надежности роботов, выполняющих конкретные задания в рамках применения роботов по назначению. Объединение нескольких методов испытаний или их последовательное осуществление может помочь разработчикам и изготовителям реализовывать сочетание возможностей роботов, необходимое для их применения по назначению.
5 Требования к оборудованию испытательного стенда
5.1 Оборудование испытательного стенда, необходимое для проведения испытаний, включает участок поверхности с чередующимися разнонаправленными четвертными элементами наклонной поверхности с подъемом и спуском под углом 15°, препятствия для задания маршрута движения робота, ограничивающую конструкцию (факультативно), хронограф и люксметр. Основным параметром испытательного стенда, который должен быть задан, является минимальная ширина проходов И/для робота, расположенных по обеим сторонам от препятствий на всем протяжении установленного маршрута (см. рисунок 4).
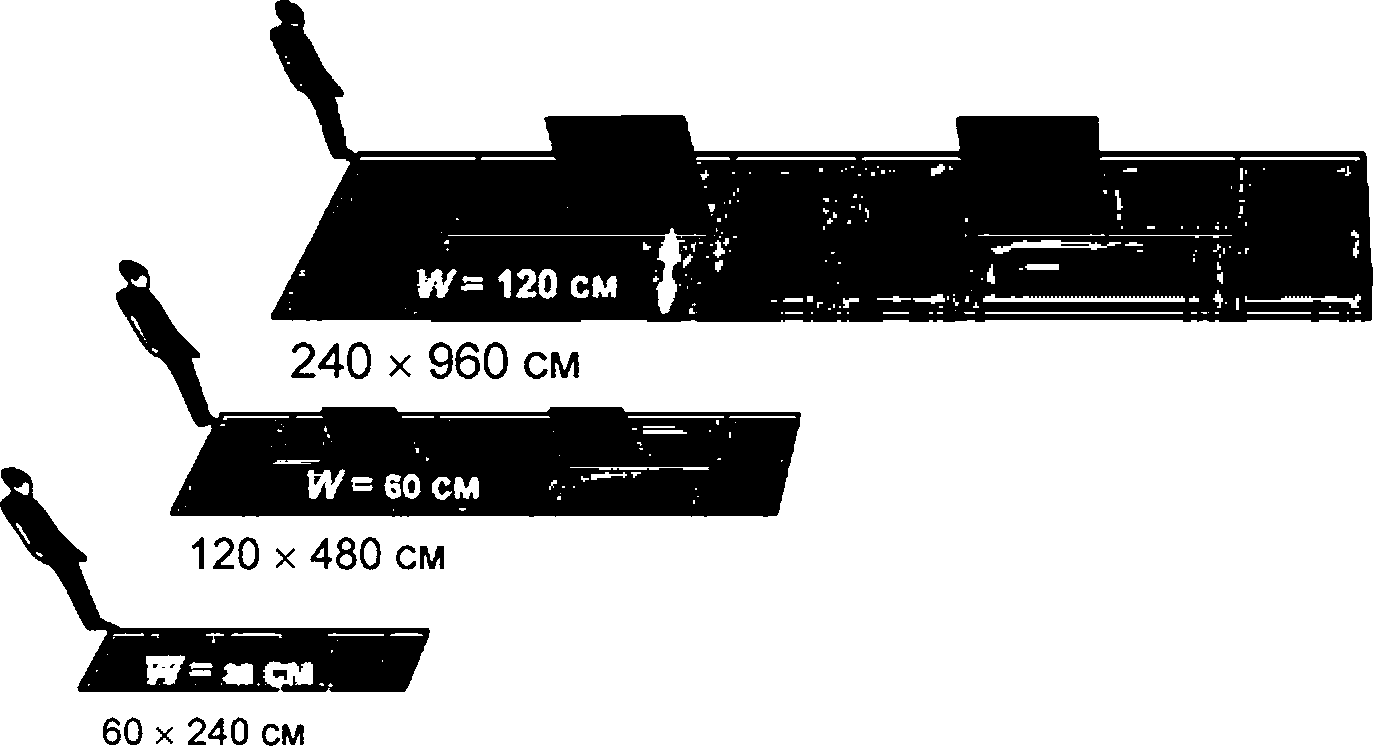
Рисунок 4 — Масштабируемая ширина проходов для имитации разной внешней среды

240 х 960 см

120 х 480 см
60 х 240 см
Минимальную ширину прохода следует выбирать в соответствии с предполагаемой средой применения робота по назначению и/или с размерами робота. С целью эффективного использования доступных строительных материалов минимальную ширину прохода, как правило, устанавливают равной 30, 60, 120 или 240 см, хотя могут быть заданы и другие размеры. Все размеры испытательного стенда масштабируют пропорционально минимальной ширине прохода (см. рисунок 5). Например, общая ширина поверхности стенда равна 214/, а общая длина поверхности стенда составляет не менее 614/. Длина стенда может быть увеличена для роботов большего размера, которые требуют большего пространства для маневрирования вокруг препятствий, оставаясь при этом внутри стенда. При выборе конкретной минимальной ширины прохода для испытательного стенда следует отметить, что полученные на нем результаты будут несопоставимы с данными, полученными на испытательном стенде с другой минимальной шириной прохода.
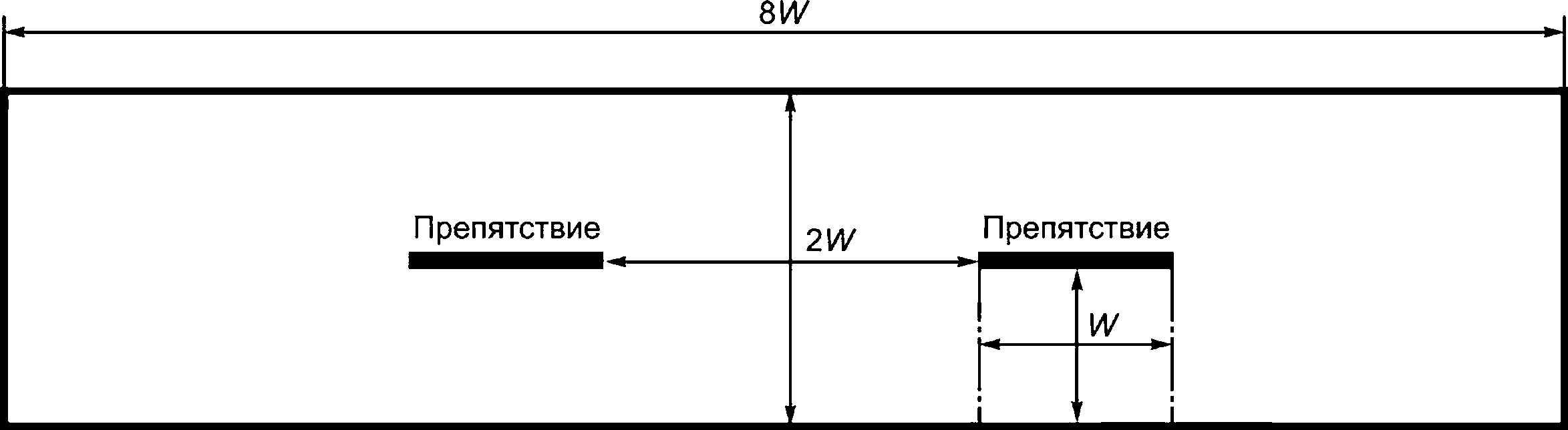
Рисунок 5 — Вид сверху на испытательный стенд с указанием размеров, пропорциональных минимальной ширине прохода И/
5.2 Поверхность с разнонаправленными подъемами и спусками — это поверхность, составленная из четвертных элементов наклонной поверхности с подъемом и спуском под углом 15°, представляющая собой прерывистую поверхность с вершинами и впадинами. Все элементы наклонной поверхности имеют квадратное основание, чтобы их можно было поворачивать на месте для формирования более сложных поверхностей. Размеры квадратного основания устанавливают равными половине минимальной ширины прохода 1/214/, поэтому на испытательном оборудовании любого размера наклонные элементы соединены между собой вдоль осевой линии ограниченных участков маршрута робота (см. рисунок 6). Поверхность наклонного элемента может быть выполнена из ориентированно-стружечной плиты (ОСП), фанеры или аналогичного материала с относительно твердой поверхностью, обладающей низким коэффициентом трения. Опорная конструкция может быть собрана из деревянных столбиков и панелей ОСП. Все наклонные элементы изготавливают с учетом выбранной площади основания для обеспечения их взаимозаменяемости, поэтому длина поверхности элемента, расположенной под углом 15°, несколько больше, чем 1/214/ в направлении вверх по склону. Ширина элемента неизменно равна 1/21/К Четыре столбика из бруса, срезанные под углом 15°, представляют собой опору для наружной поверхности наклонного элемента и соединяют три боковые панели, обеспечивающие дополнительную опору по периметру квадратного основания. Порядок укладки четвертных элементов наклонной поверхности на испытательном стенде показан на рисунке 7.
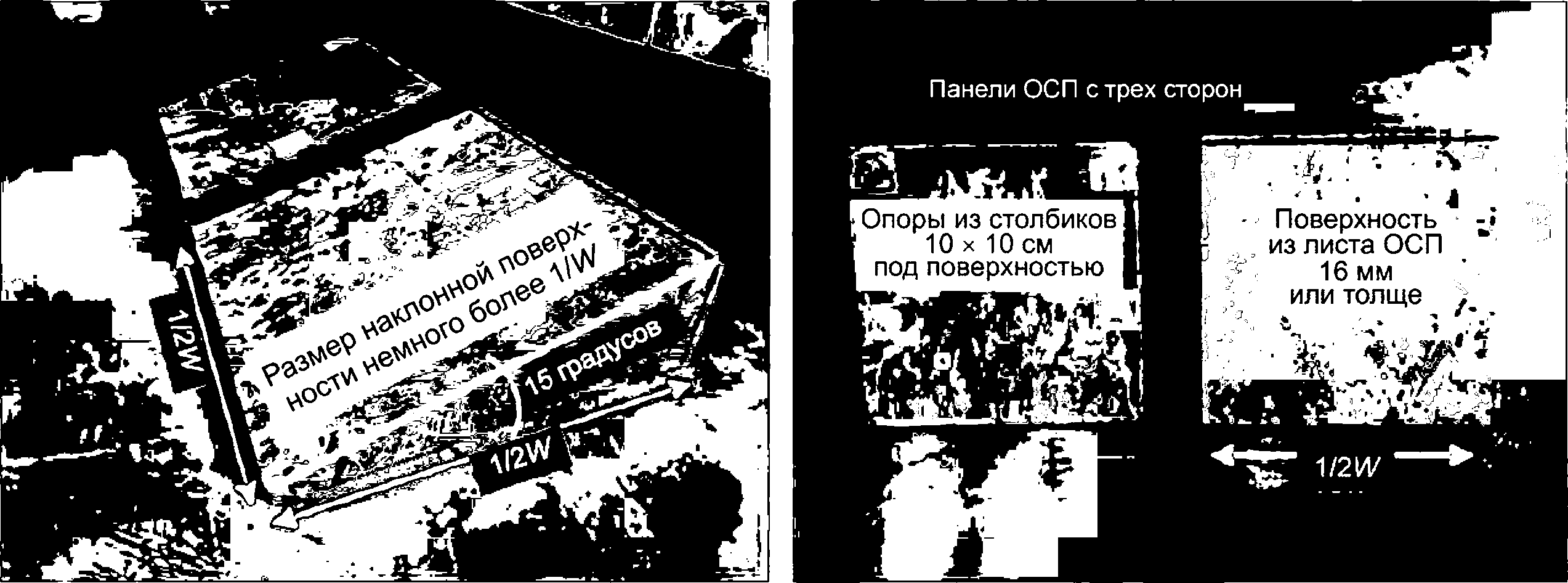
Рисунок 6 — Детали элемента наклонной поверхности
—> | г | —> | г | —> | ф | —> | г | —> | ф | —> | ф | —> | ф | —> | ф |
т | <— | ? | <— | <— | т | <— | т | <— | т | <— | т | <— | т | <— | |
—> | г | —> | г | —> | г | —> | ф | —> | ф | —> | ф | —> | ф | —> | ф |
т | <— | т | <— | т | <— | ? | <— | т | <— | т | <— | т | <— | т | <— |
Примечание — Стрелка указывает направление вверх по склону элемента.
Рисунок 7 — Порядок укладки четвертных элементов наклонной поверхности на испытательном стенде
5.3 Препятствия, ограничивающие маршрут робота, — это препятствия, размещаемые на поверхности испытательного стенда, обеспечивающие визуальные ориентиры для оператора, дистанционно управляющего роботом при прохождении заданного маршрута восьмеркой (прямым ходом) или зигзагообразного маршрута (прямым и задним ходом). Препятствия изготавливают из любого твердого или пористого материала, обеспечивающего визуальный ориентир для оператора (см. рисунок 8). Они должны быть прочными и легко поддаваться ремонту или замене после столкновения с роботом. Общая толщина препятствия не должна превышать 5 % от минимальной ширины прохода, а длина должна быть равна W.


5.4 Ограничивающая конструкция — это установленные на поверхности стенда четвертные наклонные элементы, которые фиксируют так, чтобы они не перемещались относительно друг друга. Простейшей ограничивающей конструкцией является опорная поверхность с деревянными бортами. Другой вариант ограничивающей конструкции — это стены, создающие дополнительный уровень сложности для работы робота (см. рисунок 9). Кроме того, стены способствуют обеспечению безопасности для персонала, находящегося поблизости в данном помещении.
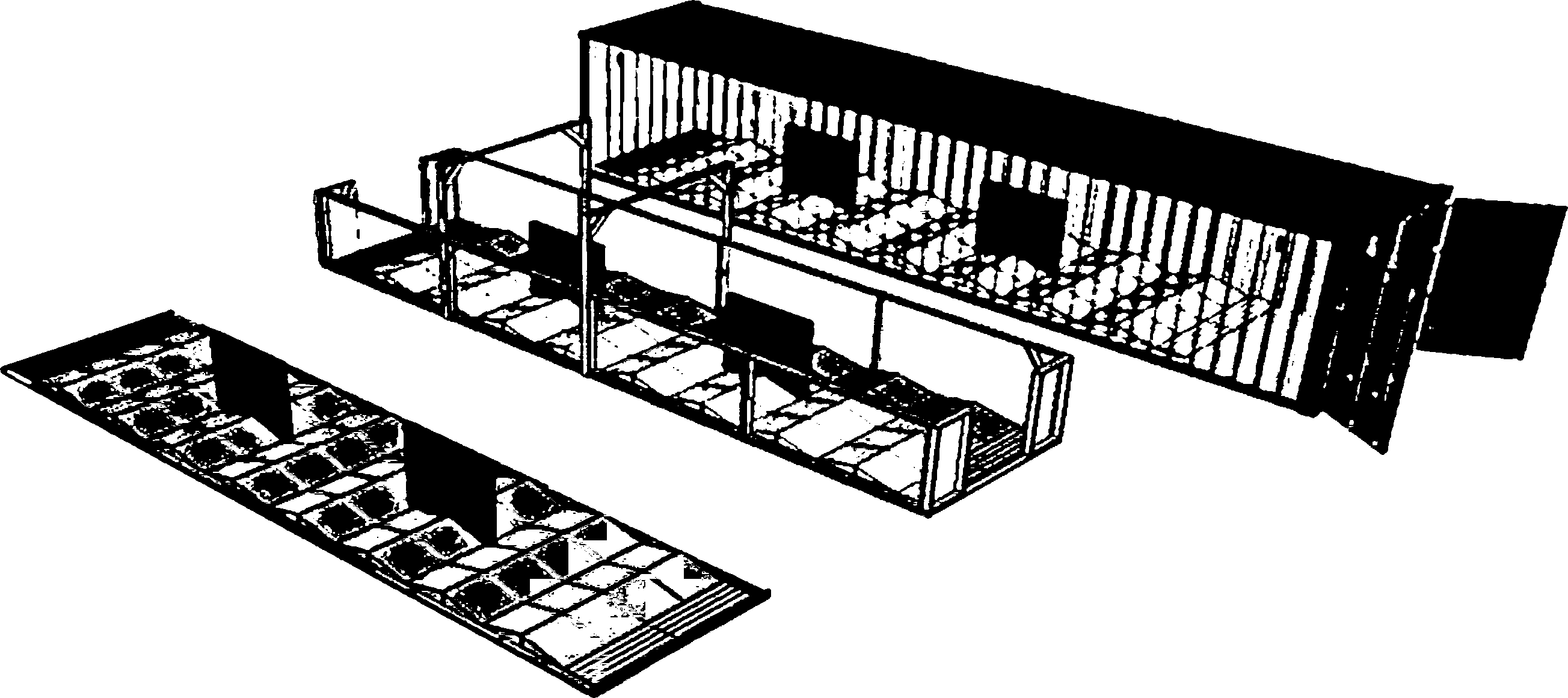
Рисунок 9 — Разные варианты ограничивающих конструкций
Для обеспечения устойчивости деревянных стен обычно применяют устанавливаемые сверху арки. Испытания согласно данному методу также можно проводить в транспортных контейнерах. Испытательные стенды с минимальной шириной прохода И/= 120 см могут не поместиться в стандартном транспортном контейнере, внутренняя ширина которого составляет менее 240 см. Стены контейнера должны быть облицованы деревянными панелями, закрывающими гофрированные стальные борта контейнера и имеющими достаточную толщину для заполнения промежутков между стеной и испытательным стендом.
5.5 Другие приборы — это приборы, предназначенные для измерения фактического времени выполнения каждой попытки, при котором необходимо использовать хронограф, обеспечивающий точную индикацию моментов начала и завершения испытания для минимизации неопределенности. Хронограф может вести прямой или обратный отсчет времени, но должен иметь возможность задавать длительность в минутах. Для измерения длительности испытания также допускается использовать секундомер. При проведении испытаний в освещенной среде или в условиях недостаточной освещенности необходимо использовать люксметр. Светлой считается среда с освещенностью >150 лк, а темной — с освещенностью <0,1 лк.
6 Требования безопасности
6.1 Для безопасной работы робота в режиме дистанционного управления или в автономном режиме необходимо наличие систем аварийной остановки. Кнопка аварийной остановки на операторском пульте управления должна быть четко обозначена и легко доступна точно так же, как и кнопка аварийной остановки, если она предусмотрена на корпусе робота. До начала испытаний персоналу, участвующему в испытаниях, следует ознакомиться с местами расположения всех кнопок аварийной остановки.
6.2 Системы аварийной остановки должны функционировать еще до того, как дистанционно управляемый робот начнет движение. Необходимо обеспечить постоянную связь между роботом и оператором до тех пор, пока робот не окажется внутри испытательного стенда, а люди либо покинут испытательный стенд, либо отойдут от робота на безопасное расстояние. Когда удаленно расположенный оператор начинает управлять роботом, приводит в действие манипулятор или передает какие-либо иные команды управления, он может не знать, что кто-то в это время работает с роботом. Поэтому, если только робот не отключен полностью, запрещается присутствие людей непосредственно на пути возможного движения робота, перед ним или сзади него, а также в пределах досягаемости манипулятора.
6.3 Использовать защитные приспособления, в частности страховочный трос, для предотвращения повреждения робота допускается только находясь на безопасном расстоянии от него. Запрещается подставлять руки, чтобы предотвратить падение или опрокидывание робота. Для этой цели следует использовать страховочные тросы. Любое взаимодействие с роботом, в том числе натягивание страховочного троса для спасения робота, следует засчитывать как ошибку, а данную попытку признать неудачной.
6.4 Испытательные стенды, предназначенные для оценки проходимости роботов, могут быть достаточно сложными и неустойчивыми и создавать опасность при их использовании для людей. Для снижения риска получения травм участники испытаний должны носить надлежащую обувь и использовать средства индивидуальной защиты. При обслуживании робота или переноске оборудования внутри стенда необходимо соблюдать внимательность и осторожность.
7 Порядок проведения испытаний
7.1 Идентификация конфигурации робота
Конфигурация предъявленного для испытаний робота должна быть идентифицирована и иметь уникальное обозначение (например, марка, модель, конфигурация), включая все подсистемы и компоненты с их характеристиками и функциями. Конфигурация робота должна соответствовать той конфигурации, которая требуется при использовании робота по назначению. Робот может иметь несколько различных конфигураций. Испытаниям допускается подвергать любое число конфигураций робота. Конфигурация робота должна оставаться неизменной во всех проводимых испытаниях, чтобы обеспечить возможность прямого сравнения характеристик и определения преимуществ и недостатков разных конфигураций робота. В ходе испытаний конфигурация испытуемого робота должна сохранять общий объем, массу и расположение центра тяжести, а также состав основных подсистем и компонентов, таких как гусеницы, колеса, ноги, манипулятор, радиосвязь, страховочный трос, операторский пульт управления и т. д. Проконтролировать более детальные изменения в конфигурации или программном обеспечении робота достаточно трудно, поэтому, как правило, ими допускается пренебречь. Если в ходе испытаний конфигурация робота изменяется, то данное испытание считают недействительным. Отчетные документы об испытаниях должны содержать подробные фотографии всех основных компонентов робота, а также видеозаписи проведенных работ по техническому обслуживанию, таких как замена гусеницы, замена аккумуляторной батареи и т. д. При необходимости в отчетные документы включают дополнительную информацию, которая может содержать данные, приведенные в 7.1.1—7.1.4.
7.1.1 Вес и размеры всех контейнеров, доставленных на место проведения испытаний или подготовленных к развертыванию робота для испытаний.
7.1.2 Перечень компонентов, необходимых для обеспечения функционирования робота, таких как батареи, зарядные устройства и расходные материалы.
7.1.3 Перечень запасных частей и инструментов, необходимых для технического обслуживания робота.
7.1.4 Сведения о дополнительных полезных нагрузках, установленных на роботе.
7.2 Подготовка испытательного стенда
Необходимо убедиться в том, что испытательный стенд подготовлен к проведению испытаний и обеспечены требуемые условия окружающей среды, для чего выполняют перечисленные в 7.2.1—7.2.6 действия.
7.2.1 Проверяют соответствие минимальной ширины прохода на испытательном стенде предполагаемой среде использования робота по назначению.
7.2.2 Проверяют, что уровень сложности испытательного стенда соответствует возможностям робота и/или эксплуатационным требованиям.
7.2.3 Проверяют готовность испытательного стенда к проведению испытаний, включая поверхность с разнонаправленными подъемами и спусками, размещение препятствий, установку ограничивающих стен и т. д.
7.2.4 Обеспечивают заданные условия окружающей среды, включая уровень освещенности, температуру и т. д.
7.2.5 Регистрируют и контролируют условия окружающей среды, включая уровень освещенности, температуру и т. д.
7.2.6 Устанавливают на хронографе намеченную длительность проведения испытаний в минутах или сбрасывают показания секундомера.
7.3 Готовность оператора
Необходимо убедиться в том, что оператор готов к проведению испытаний, выполнив перечисленные в 7.3.1—7.3.6 действия.
7.3.1 Выбирают число попыток, выполняемых в ходе испытаний (от 10 до 30), которое обеспечит заданные значения надежности и достоверности результатов.
7.3.2 Выбирают маршрут движения восьмеркой (движение только передним ходом) или зигзагообразный маршрут (движение передним и задним ходом), понимая, что результаты прохождения данных маршрутов не представляется возможным в дальнейшем сравнить между собой (см. рисунки 2 и 3).
7.3.3 Проверяют, что оператор понимает, что попытки будут считаться результативными, когда любая часть робота после прохождения заданного маршрута пресечет стартовую/финишную осевую линию, не совершив ошибок. Каждая попытка прохождения маршрута восьмеркой и зигзагообразного маршрута начинается и заканчивается на стартовой/финишной осевой линии трассы (см. рисунки 2 и 3).
7.3.4 Проверяют, что оператор знает последовательность действий в случае ошибки робота или приостановки испытаний по другой причине (см. 7.5 и 7.6).
7.3.5 При необходимости позволяют оператору потренироваться на испытательном стенде до начала испытаний, наблюдая за роботом непосредственно или дистанционно, чтобы ознакомиться с порядком проведения испытаний.
7.3.6 Размещают оператора на удаленном рабочем месте, где у него не будет прямого визуального и звукового контакта с роботом на испытательном стенде. Робот должен находиться в пределах досягаемости связи по радио или кабелю. Если оператор находится вне поля зрения, но в непосредственной близости от испытательного стенда, то ему следует надеть наушники или беруши, чтобы избежать звукового контакта с роботом на испытательном стенде.
7.4 Проведение испытаний
После того как испытательный стенд будет подготовлен и оператор будет готов к проведению испытаний, выполняют перечисленные в 7.4.1—7.4.7 действия (см. рисунки 1—3).
7.4.1 Начинают движение робота с заданной точки старта, расположенной на одном из концов трассы. При этом робот не должен соприкасаться с стартовой/финишной осевой линией.
7.4.2 Запускают хронограф, как только любая часть робота пересечет стартовую/финишную осевую линию. Каждая попытка движения по маршруту восьмеркой и зигзагообразному маршруту начинается и заканчивается на стартовой/финишной осевой линии трассы.
7.4.3 Робот перемещается по заданному маршруту, как показано на рисунках 2 и 3.
7.4.4 Регистрируют результативную попытку, когда любая часть робота пресечет стартовую/финишную осевую линию после прохождения трассы без ошибок.
7.4.5 Фиксируют ошибку и регистрируют данную попытку как несостоявшуюся, если робот повредит оборудование испытательного стенда так, что для выполнения следующей попытки потребуется его регулировка или ремонт для восстановления в исходное состояние (см. 8.5).
7.4.6 Повторяют попытки, начиная с разных концов трассы до завершения заданного числа попыток, истечения времени по хронографу или до момента, когда робот не сможет продолжить испытания.
7.4.7 Регистрируют в протоколе испытаний число результативных попыток, число несостоявшихся попыток и затраченное время.
7.5 Действия при ошибке робота
Если робот застрял или вышел из строя и для продолжения испытаний требуется какое-либо визуальное или физическое вмешательство либо если робот повредил испытательный стенд так, что требуется регулировка или ремонт стенда, то выполняют перечисленные в 7.5.1—7.5.8 действия.
7.5.1 Останавливают хронограф.
7.5.2 Фиксируют время, место и краткое описание инцидента.
7.5.3 Регистрируют данную попытку как несостоявшуюся.
7.5.4 Проверяют, может ли робот продолжить испытания, и при необходимости проводят техническое обслуживание робота.
7.5.5 Проверяют правильность настройки испытательного стенда и при необходимости выполняют регулировку или ремонт.
7.5.6 Продолжают движение робота по маршруту.
7.5.7 Перезапускают хронограф, как только любая часть робота пересечет стартовую/финишную осевую линию, начиная следующую попытку.
7.5.8 Продолжают до тех пор, пока не будет выполнено заданное число попыток или пока не истечет время, отведенное на проведение испытаний.
7.6 Остановка испытаний
Если требуется остановить испытания по какой-либо причине, кроме ошибки робота, то выполняют перечисленные в 7.6.1—7.6.6 действия.
7.6.1 Останавливают хронограф.
7.6.2 Фиксируют время, место и краткое описание причины (при необходимости).
7.6.3 Если причиной приостановки стала неисправность испытательного стенда, то проводят необходимый ремонт. Проверяют, что робот может продолжить испытания, либо выполняют надлежащее техническое обслуживание, если робот был поврежден из-за неисправности испытательного стенда.
7.6.4 Перезапускают хронограф, когда робот будет готов продолжить испытания.
7.6.5 Продолжают движение робота по заданному маршруту.
7.6.6 Продолжаают испытания до завершения заданного числа попыток или пока не истечет время, отведенное на проведение испытаний.
7.7 Перезапуск программного обеспечения
Любая ручная или автоматическая перезагрузка программного обеспечения, пульта управления или дистанционная перезагрузка робота.
8 Расчет и интерпретация результатов
8.1 В ходе проведения испытаний должно быть произведено достаточное число результативных попыток для того, чтобы продемонстрировать надежность выполнения роботом задания или уровень квалификации оператора дистанционного управления. При оценке результатов испытаний следует учитывать три показателя, представленные далее в порядке уменьшения важности.
8.2 Первый показатель — оценка завершенности испытаний. Выполнение статистически значимого числа попыток имеет существенное значение для оценки надежности исполнения задания. В зависимости от сложности задания и времени, отведенного на проведение испытаний, следует провести от 10 до 30 попыток. Выполнение заданного числа попыток без ошибок является основным показателем при оценке результатов испытаний, после достижения которого можно переходить к оценке двух других показателей.
8.3 Второй показатель — надежность выполнения задания. Если выполнено статистически значимое числе попыток, то отношение числа успешных попыток к общему числу выполненных попыток является оценкой надежности выполнения задания. Надежность выполнения задания в процентах рассчитывают по формуле
Надежность = (число результативных попыток/общее число попыток) -100. (1)
Заказчик испытаний может установить необходимые пороговые значения надежности выполнения задания. Для одних заданий может потребоваться более высокая надежность, а для других — требования по надежности могут быть менее жесткими. Например, чтобы продемонстрировать не менее 80 % надежности (при достоверности не ниже 80 %), результаты испытаний должны быть следующими:
- 10 выполненных попыток без ошибок (только первые 10 попыток);
- 20 выполненных попыток, из которых не более одной несостоявшейся попытки;
- 30 выполненных попыток, из которых не более трех несостоявшихся попыток.
Если проводят несколько испытаний, то при определении соотношения результативных попыток к числу несостоявшихся попыток следует рассматривать вместе последние 30 последовательных попыток в каждом из испытаний. Это позволит компенсировать несостоявшиеся попытки последующим набором результативных попыток. Уровень надежности и достоверности, рассчитываемый как соотношение как одних, так и других попыток, можно определить на основе статистических таблиц. В общем случае, для того чтобы повысить достоверность оценки надежности результатов испытаний, необходимо увеличивать общее число попыток выполнения задания.
8.4 Третий показатель — эффективность. В случае завершенного испытания с надежными результатами может быть рассчитана эффективность выполнения задания с целью определения незначительных различий в возможностях роботов или в уровне квалификации операторов дистанционного управления. Показателем эффективности является среднее число результативных попыток, выполненных за отведенный отрезок времени. Эффективность выполнения задания может быть рассчитана по формуле
Число попыток в минуту = (число результативных попыток/Ьремя в минутах). (2)
9 Требования к отчетности
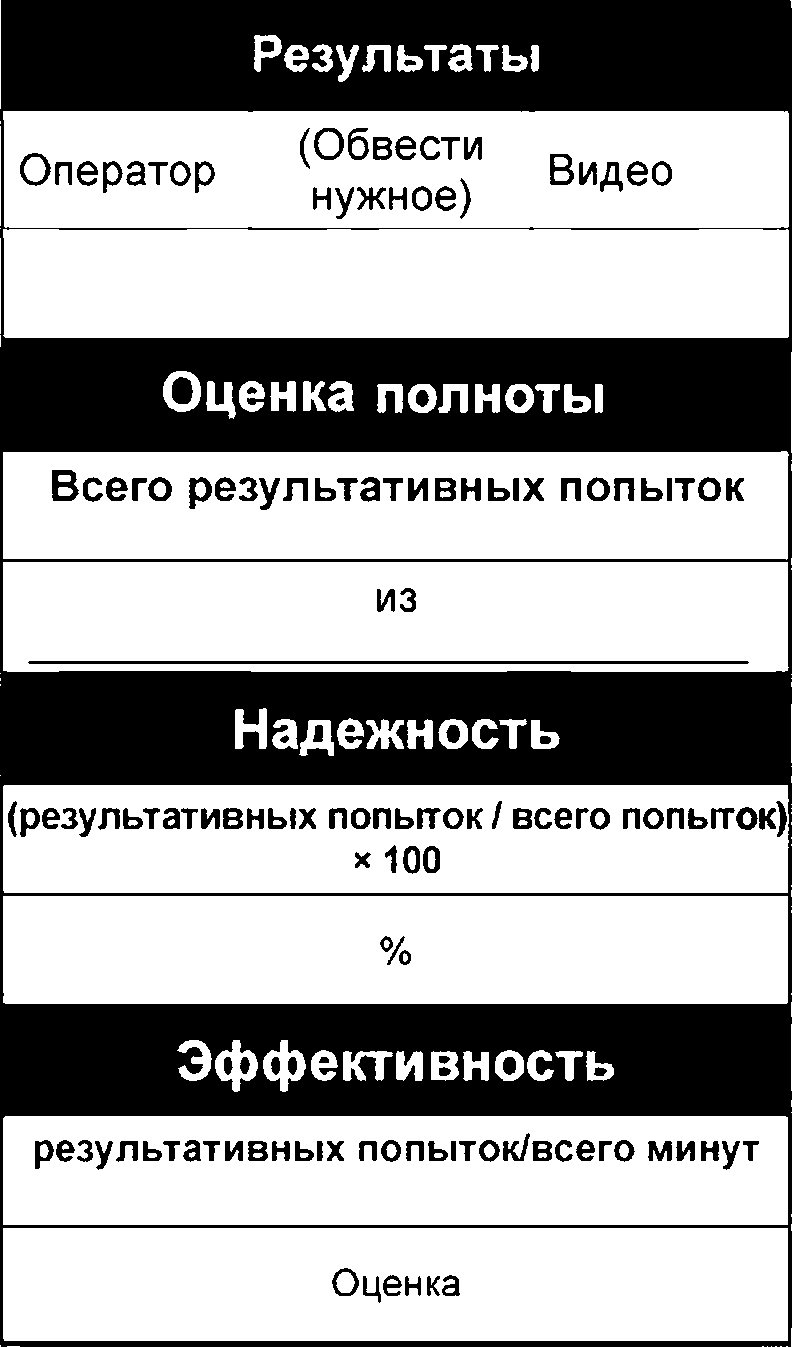
Используя записи результатов испытаний, можно проводить сравнения во времени для данного робота и оператора, для разных конфигураций роботов или для разных роботов в разных местах. Однако результаты прохождения роботом маршрута восьмеркой и зигзагообразного маршрута не допускается сравнивать между собой. Они представляют разные уровни сложности для разных видов передвижения роботов. Точно также не допускается сравнивать результаты, полученные на испытательных стендах разного масштаба. Они представляют разные уровни сложности для тех роботов, которые различаются по своим размерам. В протоколе испытаний, пример которого показан на рисунке 10, рекомендуется указывать перечисленную ниже информацию.
Протокол испытаний Проходимость. Преодоление непрерывных подъемов и спусков (по ГОСТ Р 60.6.3.6)
Дата:
Место:
Адрес:
Руководитель:
Изготовитель робота:
Модель робота:
Конфигурация робота:
Оператор/Организация:
Обозначения: J Успешная q Пауза в у Ошибка п Перезапуск ’ попытка испытаниях 11 по
Попытки (Отметьте время регистрации ошибки или паузы) | |||||
0 | 1 | 0 | 11 ___________ | 0 | 21 ___________ |
0 | 2 | 0 | 12 __________ | 0 | 22 _________ |
0 | 3 | 0 | 13 __________ | 0 | 23 _________ |
0 | 4 | 0 | 14 _________ | 0 | 24 _________ |
0 | 5 | 0 | 15 _________ | 0 | 25 _________ |
0 | 6 | 0 | 16 __________ | 0 | 26 _________ |
0 | 7 | 0 | 17 __________ | 0 | 27 _________ |
0 | 8 | 0 | 18 __________ | 0 | 28 _________ |
0 | 9 | 0 | 19 __________ | 0 | 29 _________ |
0 | ю _ | ____ 0 | 20 _________ | 0 | 30 _________ |
Примечания:
Испытательный стенд 0 И/= 0,6 м 0 И/=1,2м 0 И/=2,4м Маршрут 0 Восьмеркой 0 Зигзагообразный - Наклон испытательного стенда | Внешняя среда 0 Освещенная (>150 лк) 0 Темная (<0,1 лк) - Температура (°C) - Влажность (%) | Тип ошибки
| Длительность | ||
5 мин | 10 мин | ||||
мин | |||||
Обвести кружком или указать время, округлив до минут | |||||
Рисунок 10 — Пример протокола испытаний
9.1 Наименование метода испытаний: «Проходимость. Преодоление разнонаправленных подъемов и спусков».
9.2 Обозначение настоящего стандарта: ГОСТ Р 60.6.3.7—2023.
9.3 Дата проведения испытаний.
9.4 Место — наименование организации или полигона, где проводят испытания.
9.5 Адрес — населенный пункт, район, область, где проводят испытания.
9.6 Фамилия и инициалы руководителя испытаний, должность и организация, которую он представляет.
9.7 Изготовитель робота.
9.8 Модель робота.
9.9 Конфигурация робота (включая связь по радиоканалу или кабелю).
9.10 Фамилия и инициалы оператора, управляющего роботом, наименование организации, которую он представляет, и контактная информация.
9.11 Параметры испытательного стенда:
9.11.1 Масштаб испытательного стенда (минимальная ширина прохода).
9.11.2 Маршрут движения (восьмеркой или зигзагообразный).
9.11.3 Наклон испытательного стенда.
9.12 Условия окружающей среды:
9.12.1 Уровень освещенности.
9.12.2 Температура.
9.72.3 Влажность.
9.12.4 Другие условия, если требуется.
9.73 Результаты, полученные от оператора (в ходе испытаний), или видеозапись (после завершения испытаний)
9.14 Затраченное время (общая продолжительность испытаний).
9.75 Тип ошибки.
9.15.1 «Ошибка робота» — робот застрял или вышел из строя и требует визуального осмотра или физического вмешательства для продолжения работы.
9.75.2 «Перезапуск программного обеспечения» — перезагрузка пульта управления или дистанционная перезагрузка робота.
9.75.3 «Пауза в испытаниях» — испытания остановлены по любой причине, кроме ошибки робота.
9.76 Результаты.
9.16.1 Результаты, полученные от оператора (в ходе испытаний).
9.76.2 Видеозапись, полученная после завершения испытаний.
9.76.3 «Оценка завершенности» — общее число результативных попыток.
9.16.4 «Надежность» — отношение числа результативных попыток к общему числу выполненных попыток.
9.76.5 «Эффективность» — отношение числа результативных попыток к затраченному времени в минутах.
9.7 7 Число выполненных попыток.
9.78 Примечания (любые наблюдения и отклонения от нормы).
10 Погрешность метода испытаний
Результатом испытаний по данному методу является не содержащий количественных показателей отчет о результативном или несостоявшемся достижении заданных значений надежности. Испытательный стенд обеспечивает четкую фиксацию как одной, так и другой попытки, поэтому субъективность человеческой оценки результатов существенного значения не имеет. Поскольку результаты испытаний не являются количественными, то невозможно сделать вывод о том, насколько точные результаты обеспечивает данный метод испытаний.
УДК 621.865.8:007.52:006.86:006.354 | ОКС 13.200 25.040.30 |
Ключевые слова: роботы, робототехнические устройства, методы испытаний, сервисные мобильные роботы, роботы для работы в экстремальных условиях, проходимость, поверхность с разнонаправленными подъемами и спусками, испытательное оборудование, порядок проведения испытаний
Редактор Л. С. Зимилова Технический редактор И.Е. Черепкова Корректор С.И. Фирсова Компьютерная верстка Е.А. Кондрашовой
Сдано в набор 04.09.2023. Подписано в печать 12.09.2023. Формат 60х841/8. Гарнитура Ариал. Усл. печ. л. 2,32. Уч.-изд. л. 2,10.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении в ФГБУ «Институт стандартизации» , 117418 Москва, Нахимовский пр-т, д. 31, к. 2.
{kind=link}