ГОСТ Р 60.6.3.12-2023
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
МЕТОДЫ ИСПЫТАНИЙ СЕРВИСНЫХ МОБИЛЬНЫХ РОБОТОВ ДЛЯ РАБОТЫ В ЭКСТРЕМАЛЬНЫХ УСЛОВИЯХ
Радиосвязь в зоне прямой видимости
Robots and robotic devices. Test methods for service mobile robots for work in extreme conditions. Radio communication in line-of-sight range
ОКС 13.200
25.040.30
Дата введения 2024-01-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным автономным научным учреждением "Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики" (ЦНИИ РТК) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 "Робототехника"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 сентября 2023 г. N 861-ст
4 Настоящий стандарт является модифицированным по отношению к стандарту АСТМ Е2854/Е2854М-21* "Стандартный метод испытаний для оценки возможностей радиосвязи роботов для работы в экстремальных условиях в зоне прямой видимости" (ASTM Е2854/Е2854М-21 "Standard test method for evaluating response robot radio communications line-of-sight range", MOD) путем внесения технических отклонений, объяснение которых приведено во введении к настоящему стандарту.
Наименование настоящего стандарта изменено относительно наименования указанного стандарта для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5) и для увязки с наименованиями, принятыми в существующем комплексе национальных стандартов Российской Федерации.
Сведения о соответствии ссылочных национальных стандартов стандартам, использованным в качестве ссылочных в примененном стандарте, приведены в дополнительном приложении ДА
5 ВЗАМЕН ГОСТ Р 60.6.3.12-2019
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
Введение
Стандарты комплекса ГОСТ Р 60 распространяются на роботы и робототехнические устройства. Их целью является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов, узлов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: "Общие положения, основные понятия, термины и определения", "Технические и эксплуатационные характеристики", "Безопасность", "Виды и методы испытаний", "Механические интерфейсы", "Электрические интерфейсы", "Коммуникационные интерфейсы", "Методы моделирования и программирования", "Методы построения траектории движения (навигация)", "Конструктивные элементы". Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации - промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам, сервисным мобильным роботам, а также к морским робототехническим комплексам.
Настоящий стандарт относится к тематической группе "Виды и методы испытаний" и распространяется на сервисные мобильные роботы, предназначенные для работы в экстремальных условиях. Настоящий стандарт определяет метод испытаний радиосвязи в зоне прямой видимости. Целью данного метода испытаний является оценка способности телеуправляемого робота выполнять задания по маневрированию и обследованию в условиях прямой видимости.
Настоящий стандарт является модифицированным по отношению к стандарту АСТМ Е2854/2854М-21, разработанному техническим комитетом Е54 ASTM International "Прикладные системы для национальной безопасности" в соответствии с принципами стандартизации, установленными в Решении о принципах разработки международных стандартов, руководств и рекомендаций Комитета по техническим барьерам в торговле Всемирной торговой организации, для приведения его в соответствие с требованиями основополагающих национальных и межгосударственных стандартов.
В настоящий стандарт внесены следующие технические отклонения по отношению к стандарту АСТМ Е2854М-21:
- не включены примечания и сноски примененного стандарта, которые нецелесообразно применять в российской национальной стандартизации в связи с их содержанием, имеющим справочный характер и относящимся к системе стандартизации США;
- значения физических величин указаны только в Международной системе единиц (СИ), используемой в российской национальной стандартизации в соответствии с требованиями ГОСТ 8.417, тогда как в примененном стандарте значения измерений указаны как в системе единиц СИ, так и в американских единицах (дюйм-фунт); соответственно пункт 1.5 примененного стандарта об использовании двух систем единиц измерения не включен в настоящий стандарт, соответственно нумерация пункта 1.6 примененного стандарта изменена на 1.5;
- для обеспечения более четкого структурирования основных положений стандарта и обеспечения соответствия требованиям ГОСТ 1.5 текст пунктов примененного стандарта, содержащий одинаковые положения, приводится один раз;
- положения пунктов 4.1 и 4.2 примененного стандарта приведены в разделе 6. Нумерация пунктов 4.3-4.9 примененного стандарта изменена на 4.1-4.7 соответственно;
- пункт 1.7 примененного стандарта не включен в настоящий стандарт, так как его содержание приведено во введении;
- в раздел 2 "Нормативные ссылки" настоящего стандарта не включены ссылки на документы системы стандартизации США, которые нецелесообразно применять в российской национальной стандартизации;
- исключен подраздел 2.2 примененного стандарта, содержащий ссылки на документы системы стандартизации США, которые нецелесообразно применять в российской национальной стандартизации, и добавлена ссылка на ГОСТ Р 60.6.3.26, выделенная курсивом;
- в настоящий стандарт в соответствии с ГОСТ Р 1.7, ГОСТ 1.3, ГОСТ Р 1.5 и ГОСТ 1.5 включен раздел 3 "Термины и определения" вместо использованного в примененном стандарте раздела 3 "Терминология";
- в настоящем стандарте терминологические статьи расположены в алфавитном порядке русского языка для обеспечения соответствия требованиям ГОСТ 1.5;
- пояснения к терминологическим статьям в настоящем стандарте оформлены как примечания в соответствии с ГОСТ 1.5 вместо использованных в примененном стандарте подпунктов "Обсуждение";
- таблица, приведенная в пункте 6.6.1 примененного стандарта, обозначена как таблица 1;
- исключена нумерация пунктов 6.1.1, 6.2.1, 6.3.1, 6.4.1, 6.5.1, 6.6.1, 6.7.1, 6.8.1, 6.9.1, 6.11.1, 6.12.1, 11.1, 12.1 примененного стандарта в соответствии с требованиями ГОСТ 1.5-2001, пункт 4.2.3;
- в настоящем стандарте ключевые слова приведены в библиографических данных в соответствии с ГОСТ 1.5 вместо раздела 13 "Ключевые слова" в примененном стандарте.
1 Область применения
1.1 Настоящий стандарт распространяется на дистанционно управляемые наземные мобильные роботы, использующие радиосвязь для обмена информацией в реальном времени между роботом и оператором, и устанавливает метод испытаний для оценки максимальной дальности радиосвязи в зоне прямой видимости, на которой оператор управляет маневрированием робота, скоростью его движения, остановкой в точно заданных местах, оптической резкостью и другими функциями. Данный метод испытаний является одним из ряда методов испытаний радиосвязи, предназначенных для общей оценки возможностей робототехнического комплекса.
1.2 Робототехнический комплекс для работы в экстремальных условиях предусматривает присутствие удаленно расположенного оператора, управляющего выполнением большинства функций, поэтому в состав комплекса должны быть включены бортовая камера на роботе и дисплей у оператора. Наличие у робота каких-либо дополнительных возможностей или автономного режима работы следует учитывать при оценке эффективности или производительности всего робототехнического комплекса.
1.3 Разные категории пользователей могут устанавливать свои собственные количественные значения параметров, определенных в настоящем стандарте, в зависимости от конкретных требований выполняемых роботом задач.
1.4 Испытания согласно данному методу могут быть проведены в любом месте, где можно воспроизвести необходимые условия внешней среды и установить испытательное оборудование.
1.5 Требования настоящего стандарта не распространяются на все проблемы безопасности, связанные с его применением, если таковые имеются. Пользователи настоящего стандарта отвечают за разработку необходимых мер безопасности и охраны здоровья, а также за определение применимости законодательных ограничений до использования настоящего стандарта.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р 60.6.3.1 Роботы и робототехнические устройства. Методы испытаний сервисных мобильных роботов для работы в экстремальных условиях. Термины и определения
ГОСТ Р 60.6.3.16 Роботы и робототехнические устройства. Методы испытаний сервисных мобильных роботов для работы в экстремальных условиях. Датчики. Острота технического зрения
ГОСТ Р 60.6.3.25 Роботы и робототехнические устройства. Методы испытаний сервисных мобильных роботов для работы в экстремальных условиях. Логистика. Развертывание роботов после транспортировки
ГОСТ Р 60.6.3.26 Роботы и робототехнические устройства. Методы испытаний сервисных мобильных роботов для работы в экстремальных условиях. Логистика. Конфигурация робототехнического комплекса
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочного стандарта в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ Р 60.6.3.1, а также следующие термины с соответствующими определениями:
3.1 |
автономность (autonomy): Способность выполнять задачи по назначению на основе текущего состояния и восприятия внешней среды без вмешательства человека. [ГОСТ Р 60.0.0.4-2023, статья 3.2] |
3.2 |
автономный режим работы: Режим работы, при котором мобильный робот получает задание от оператора или внешней системы управления, с которой взаимодействует, и выполняет его без дальнейшего взаимодействия с оператором или внешней системой. [ГОСТ Р 60.6.0.1-2021, статья 2] |
3.3 |
операторский пульт управления; ОПУ [operator control unit (OCU)]: Устройство, используемое оператором для телеуправления роботом. [ГОСТ Р 60.6.3.10-2019, статья 3.7] |
3.4 |
полуавтономный режим работы: Режим работы, при котором оператор и мобильный робот взаимодействуют в процессе выполнения задания. Примечание - В промежутках между вмешательствами оператора мобильный робот способен работать автономно. [ГОСТ Р 60.6.0.1-2021, статья 27] |
3.5 |
телеуправление (teleoperation): Управление в реальном времени движением робота, осуществляемое человеком дистанционно. [ГОСТ Р 60.0.0.4-2023, статья 6.17] |
3.6 |
уровень автономности: Условная категория, позволяющая ранжировать сервисных мобильных роботов по степени их способности функционировать без вмешательства человека. [ГОСТ Р 60.6.0.1-2021, статья 37] |
4 Краткое описание метода испытаний
4.1 Данный метод предназначен для испытаний дистанционно управляемых наземных мобильных роботов, использующих радиосвязь для обмена данными в реальном времени между роботом и операторским пультом управления. Настоящий стандарт определяет задания по маневрированию и наведению камеры, которые должны выполняться на заданных расстояниях между роботом и операторским пультом управления (см. рисунок 1). В рамках данного метода испытаний определяют максимальную дальность радиосвязи в условиях прямой видимости, на которой робот сохраняет способность маневрировать во всех направлениях, включая постоянное управление направлением и скоростью движения, точную остановку, обеспечение визуальной четкости передаваемого изображения и другие функции. Испытания согласно данному методу проводят в условиях отсутствия радиопомех и минимального влияния на распространение радиоволн. Аналогичные испытания можно проводить в любых важных для оценки рабочих характеристик робота реальных условиях в зоне прямой видимости (например, при наличии радиопомех).
 |
Рисунок 1 - Общий вид испытательного стенда
4.2 Испытания по данному методу проводят на прямой ровной поверхности шириной не менее 6 м и длиной более максимальной дальности радиосвязи испытуемого робота либо более дальности, требуемой для использования робота по назначению. На трассе с твердым покрытием не должно быть никаких препятствий, а также отражающих металлических объектов в пределах 50 м по обе стороны от осевой линии, чтобы минимизировать влияние отраженных радиоволн. В зависимости от общей требуемой длины трассы испытательный стенд может быть развернут на шоссе, взлетно-посадочной полосе аэродрома или автомобильной парковке (рисунок 2).
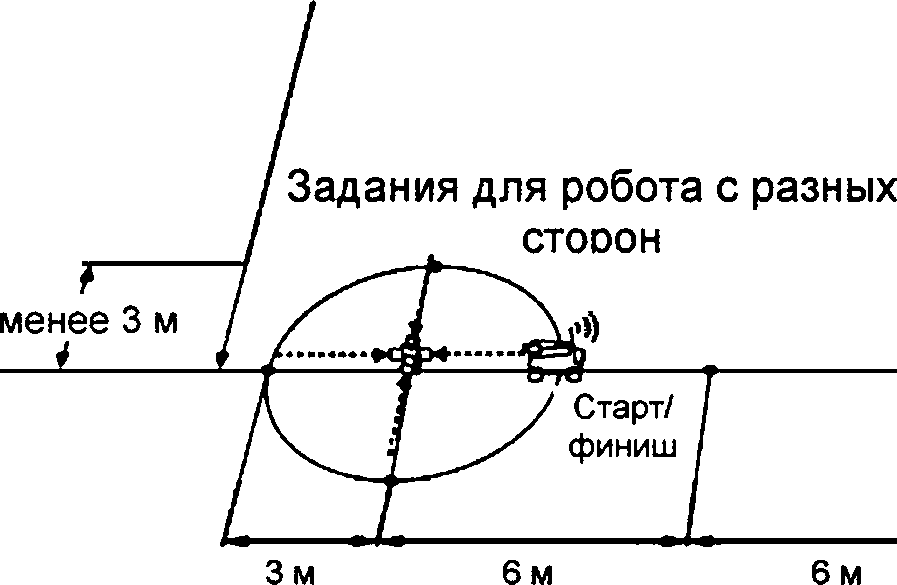 |
Рисунок 2 - Задания для маневрирования робота
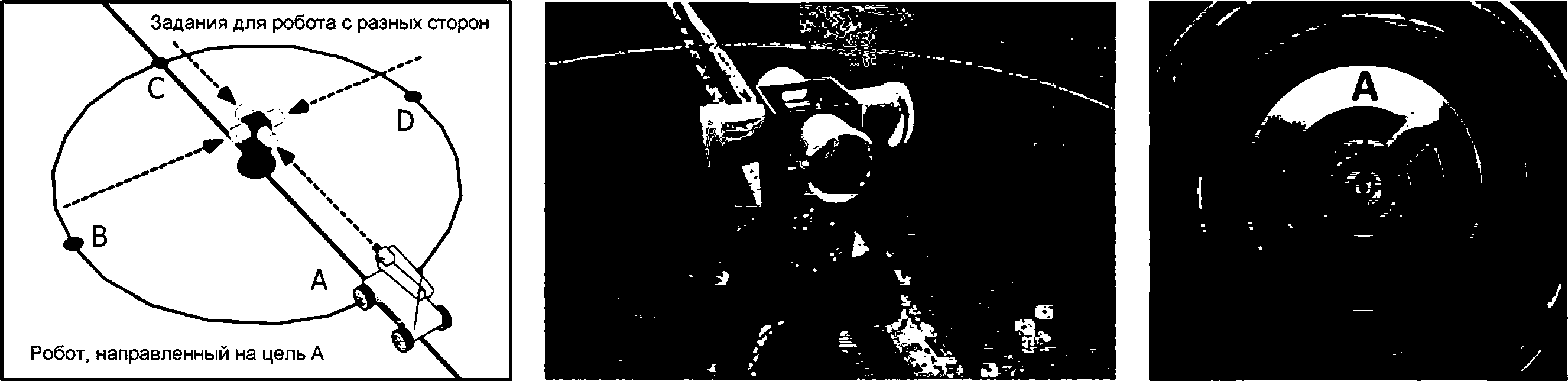
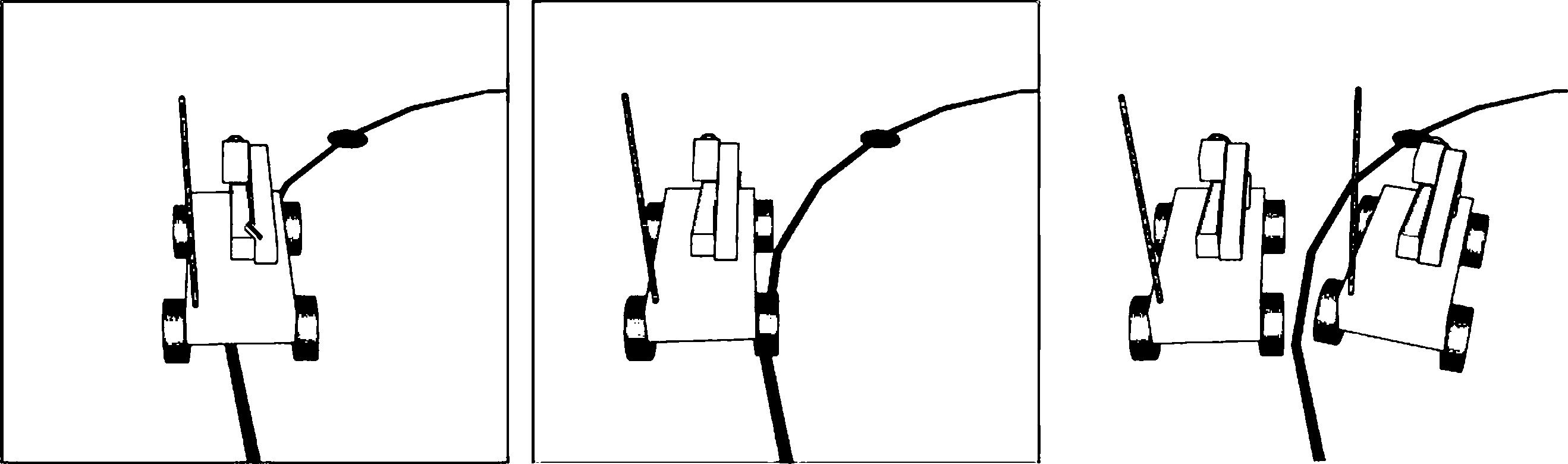
4.3 При выполнении задания по маневрированию робот должен двигаться по отмеченному на земле круговому маршруту радиусом 3 м, демонстрируя способность постоянного управления направлением движения и скоростью. Двигаясь по круговому маршруту, робот должен с помощью камеры переднего вида, размещенной на шасси или над шасси робота, определять положение и поочередно останавливаться у четырех перпендикулярно расположенных целевых объектов, установленных в центре кругового маршрута, для выполнения задания по наведению камеры и оценке визуальной четкости изображения. Целевой объект (далее - цель) представляет собой полый усеченный конус без основания с большим диаметром и нанесенным на внутреннюю поверхность основания с меньшим диаметром оптотипом в виде кольца зеленого цвета, внутри которого расположены концентрические кольца Ландольта. При выполнении этих заданий робот должен поворачиваться в четырех разных направлениях относительно операторского пульта управления, чтобы продемонстрировать отсутствие проблем с передачей или получением радиосигналов, связанных с ориентацией робота. Нанесенные на цели оптотипы видимы под ограниченным углом, что позволяет оценить точность наведения робота на цель. Успешность выполнения задания по маневрированию оценивается по пятибалльной шкале (см. рисунки 3 и 4).
 |
Слева - робот правильно движется по круговому маршруту, имея не менее одной точки контакта с поверхностью по обеим сторонам от маршрутной линии.
В центре - если одна из точек контакта с поверхностью касается маршрутной линии, то это также считается правильным расположением.
Справа - неправильное расположение робота, когда все точки контакта робота с поверхностью находятся по одну сторону от маршрутной линии.
Рисунок 3 - Правильное и неправильное расположение робота на маршрутной линии
 |
При правильном выравнивании робота с каждой целью зеленое кольцо должно быть полностью видно*. Для повышения контраста внутренний край зеленого кольца выделен черным цветом. Если кольцо видно не полностью, то выравнивание считается неправильным.
Рисунок 4 - Правильное и неправильное выравнивание
4.4 Для выполнения заданий по оценке визуальной четкости изображения необходимо определить направления разрывов в пяти уменьшающихся концентрических кольцах Ландольта каждого оптотипа. Для каждого из четырех оптотипов применяется отдельная пятибалльная шкала оценки визуальной четкости изображения, всего робот может получить 20 баллов.
4.5 При подсчете результатов испытания следует учитывать четыре показателя. Показатели следует учитывать в следующем порядке важности:
- дальность радиосвязи в зоне прямой видимости;
- вероятность;
- среднее значение визуальной четкости изображения;
- эффективность.
4.6 Испытания по данному методу проводят с соблюдением надлежащих мер безопасности с целью снижения вероятности опасного поведения робота при потере связи. Оператор начинает выполнять задания по маневрированию и оценке визуальной четкости с расстояния, на котором происходит потеря управления или поступающих видеоданных. Последующие попытки оператор выполняет, последовательно уменьшая расстояние до робота с шагом 6 м до тех пор, пока все задания по маневрированию во всех направлениях и визуальной четкости не будут успешно выполнены. Зафиксированное при этом расстояние от центра круга, где расположены оптотипы, до операторского пульта управления и расположенной рядом антенны принимают за максимальную дальность радиосвязи в зоне прямой видимости.
4.7 Возможны следующие виды ошибок.
4.7.1 Любой контакт робота с испытательным оборудованием, требующий наладки или ремонта для возврата испытательного стенда в исходное состояние.
4.7.2 Любое визуальное, звуковое или физическое взаимодействие, помогающее роботу или удаленно расположенному оператору.
4.7.3 Выезд робота за пределы испытательного стенда во время испытания.
4.8 В ходе испытаний должно быть выполнено достаточное число успешных попыток, чтобы продемонстрировать надежность робота или профессионализм удаленного оператора. Продолжительность испытания в объеме от 10 до 30 попыток должна составить от 30 до 60 мин. При измерении возможностей испытуемого робота важно выделить достаточно времени для проведения всего испытания с опытным оператором. При оценке квалификации оператора важно ограничить время испытания так, чтобы опытные операторы и новички испытывали одинаковую рабочую усталость.
4.9 В испытания по данному методу могут быть включены и другие задания, важные для оценки рабочих характеристик робота при его применении по назначению, например оценка восприятия цвета, восприятия температуры, остроты слуха, запаздывания, потери сигналов/пакетов и т.д.
5 Применение метода испытаний
5.1 Данный метод испытаний является частью комплекса связанных методов испытаний, обеспечивающих воспроизводимые измерения характеристик средств радиосвязи у роботов с дистанционным управлением. Он обеспечивает измерение максимальной дальности радиосвязи между роботом и рабочим местом оператора в зоне прямой видимости при выполнении заданий по маневрированию робота в разных направлениях и определению визуальной четкости передаваемого изображения для оценки снижения возможностей по решению поставленных задач из-за задержки и потери связи.
5.2 Испытания по данному методу легко организовать и провести, так как для них требуется недорогое и легко изготавливаемое оборудование, поэтому данный метод испытаний может широко тиражироваться. Это дает возможность сравнивать результаты испытаний, проведенных в разных местах и в разное время с целью определения лучших в своем классе роботов и операторов.
5.3 Испытания по данному методу следует проводить в контролируемых условиях внешней среды при отсутствии радиопомех и минимальном воздействии на распространение радиоволн с целью измерения основных характеристик, позволяющих сравнивать между собой разные робототехнические комплексы. Данные испытания также могут быть включены в программу обучения операторов для оценки дальности радиосвязи в зоне прямой видимости с дополнительным снижением качества связи из-за неконтролируемых переменных факторов, таких как радиопомехи, погодные условия и т.д. Результаты подобных испытаний для разных робототехнических комплексов можно сравнивать между собой только при условии их проведения в одинаковой внешней среде и при одинаковых условиях, так как при проведении испытаний в разных местах и в разных условиях невозможно обеспечить корректное сравнение результатов.
5.4 Данный метод испытаний может быть использован для принятия обоснованных решений при покупке роботов и оценке рабочих характеристик роботов при проведении приемочных испытаний. Он позволяет привести технические требования и ожидания пользователей в соответствие с существующими ограничениями технических возможностей.
5.5 Данный метод испытаний допускается использовать в качестве воспроизводимого практического задания или в качестве задания, включенного в программы обучения операторов. В ходе выполнения заданий операторы могут изучить функционирование робота при ухудшении радиосвязи и наработать навыки по решению возникающих проблем. Полученные показатели квалификации операторов дистанционного управления позволяют отслеживать изменения навыков с течением времени, а также сравнивать показатели в разных организациях, регионах или со средними показателями по стране.
5.6 Данный метод испытаний может быть использован для разработки технических инноваций, демонстрации прорывных возможностей и оценки надежности роботов, выполняющих конкретные задания в рамках применения роботов по назначению. Объединение нескольких методов испытаний или их последовательная реализация может помочь разработчикам и изготовителям реализовывать сочетание возможностей роботов, необходимое для их применения по назначению.
6 Требования к испытательному оборудованию
6.1 Среда проведения испытаний
Испытания по данному методу проводят в условиях отсутствия радиопомех в частотном диапазоне, близком к частотному диапазону, использованному в испытуемом роботе. Для этого необходимо оборудование для контроля частоты радиосвязи, позволяющее определить отсутствие помех от других источников. Испытания по данному методу могут также быть проведены в условиях наличия других известных или неизвестных источников радиосигналов, находящихся поблизости. При этом оценку возможностей роботов следует проводить в условиях присутствия расположенных поблизости мощных радиопередатчиков, таких как транспортные средства аварийных служб, вышки мобильной связи и радиостанции, представляющих собой источники потенциально существенных радиопомех. Данные испытания сложнее повторить в тех же условиях, но все же они позволяют сравнить рабочие характеристики разных роботов, испытываемых в одинаковой внешней среде примерно в одно и то же время.
6.2 Испытательный стенд
Испытательный стенд (см. рисунок 1) должен иметь твердую плоскую поверхность шириной не менее 6 м и длиной более максимальной дальности радиосвязи испытуемого робота, либо более дальности, требуемой для использования робота по назначению. Поверхность должна быть достаточно ровной и прямой, чтобы обеспечивать беспрепятственную прямую видимость между роботом и антенной удаленного рабочего места оператора на протяжении всего испытания.
Небольшим наклоном или подъемом поверхности стенда можно пренебречь, если вдоль осевой линии отсутствуют впадины, препятствующие обеспечению прямой видимости между роботом и антенной рабочего места оператора. Максимальная высота антенны над уровнем земли не должна превышать 2 м. Кроме того, в пределах 50 м от осевой линии не должно быть никаких заграждений или отражающих металлических объектов, чтобы минимизировать влияние многократных отражений радиосигналов и ограничить их только сигналами, отраженными от поверхности земли. В зависимости от возможностей испытуемого робота может быть использовано шоссе, взлетно-посадочная полоса или автостоянка, при условии отсутствия металлических сооружений, автомобилей, перил, дорожных знаков и т.д. Практически значимые варианты испытаний по данному методу, выполняемые на поглощающих поверхностях, например на траве, либо при наличии поблизости отражающих металлических объектов или антенн, установленных на автомобилях или других конструкциях так, что их высота превышает 2 м, либо на сочетаниях всего вышеперечисленного, обладают меньшей повторяемостью, но все же являются основанием для сравнения разных роботов, испытываемых в одинаковой внешней среде и одинаковых условиях.
6.3 Пошаговое увеличение расстояния
Расстояние от места расположения рабочего места оператора до центра окружности, где робот выполняет задания, увеличивают пошагово (см. рисунок 1). Размер каждого шага равен 6 м. Общее расстояние должно превышать максимальную для оцениваемого робота дистанцию радиосвязи в зоне прямой видимости. В качестве осевой линии может быть использована разделительная полоса дорожного полотна, шов дорожного покрытия либо измерительная лента, натянутая и закрепленная на поверхности. Каждый шаг увеличения расстояния должен быть отмечен белой краской или другим способом, позволяющим четко определить его местоположение и расстояние от центра кругового маршрута робота.
6.4 Круговой маршрут робота
Круговой маршрут робота (см. рисунок 2) размечают на поверхности стенда окружностью белого цвета радиусом 3 м, по которой должен двигаться робот при выполнении заданий. Окружность может быть нанесена с помощью веревки фиксированной длины, привязанной одним концом к ролику с баллоном белой краски, а другим концом к столбику или грузу, установленному в центре окружности. Следует туго натянуть веревку, чтобы обеспечить надлежащий радиус окружности, и затем постоянно ее натягивать, двигаясь по кругу и нанося разметку. На окружности необходимо нанести четыре дополнительные метки, расположенные под углом 90° друг к другу, которые будут обозначать точки, где робот должен повернуть внутрь круга, чтобы оказаться направленным на перпендикулярно расположенные цели. Метки для выравнивания с целями A и C наносят на пересечении окружности и осевой линии, при этом метка для цели А должна быть расположена ближе к удаленному рабочему месту оператора, а для цели C - дальше от него. Метки для выравнивания с целями B и D должны быть расположены перпендикулярно к осевой линии, при этом метка для цели В должна быть слева, если смотреть от рабочего места оператора, а для цели D - справа. Необходимо правильно разместить цели B и D и нанести метки на окружности.
6.5 Перпендикулярно расположенные цели
 |
Слева - высота расположения целей должна быть различной для роботов разного размера, поэтому должна быть обеспечена регулировка положения целей по высоте.
В центре - штабелируемые решетчатые ящики обеспечивают взаимно перпендикулярные поверхности для монтажа целей и простую регулировку высоты их положения.
Справа - деревянные блоки, установленные внутри ящиков, обеспечивают закрепление на их внешней поверхности целей с помощью шурупов. Для быстрой установки и снятия можно также использовать болты, шайбы и барашковые гайки.
Рисунок 5 - Перпендикулярно расположенные цели
В центре кругового маршрута робота размещены взаимно перпендикулярно четыре цели (см. рисунок 5), в качестве которых могут быть использованы пластиковые ведра, обеспечивающие ограничение угла обзора оптотипов, расположенных на внутренней поверхности основания. Цели расположены через каждые 90° по круговому маршруту робота, начиная с точки пересечения нанесенной окружности и осевой линии. Высоту расположения целей дискретно изменяют с помощью ящиков или других неметаллических предметов, чтобы обеспечить роботам разных габаритов возможность полностью увидеть зеленое кольцо на внутренней поверхности основания при условии, что робот находится на окружности. На рисунке 5 показаны использованные в качестве целей пластиковые ведра объемом 7,5 л с внутренним диаметром дна 20 см, на котором можно разместить выполненные на листах форматов Letter или А4 наклейки с кольцами Ландольта. Рекомендуется использовать ведра белого цвета, так как они отражают свет и подсвечивают расположенные на дне оптотипы. Можно использовать ведра других размеров и цветов при условии, что они позволяют испытуемому роботу четко видеть расположенные на дне оптотипы. Каждая цель обозначена буквами A, B, C, D для определения разных направлений ориентации робота с целью регистрации результата при выставлении оценки. Цель, обозначенную буквой A, робот видит с ближайшей к рабочему месту оператора точки пересечения кругового маршрута с осевой линией. Остальные буквенные обозначения следуют в алфавитном порядке в направлении по часовой стрелке.
6.6 Оптотипы, нанесенные внутри целей
 |
Слева - оптотипы для определения визуальной четкости изображения, размещенные на внутренней поверхности основания целей, представляют собой концентрические кольца Ландольта уменьшающегося диаметра с разнонаправленными разрывами.
Справа - принятые обозначения разных направлений разрывов в кольцах.
Рисунок 6 - Оптотипы
Внутри каждой цели размещен нанесенный на внутреннюю поверхность основания оптотип, содержащий внешнее кольцо для проверки ориентации робота относительно цели (см. рисунки 4, 5 и 6). На рисунках показано кольцо зеленого цвета толщиной 2,5 см, но допускается использовать любой другой контрастный цвет. Кроме того, оптотип для оценки визуальной четкости изображения содержит пять концентрических колец Ландольта (см. ГОСТ Р 60.6.3.16) уменьшающихся диаметров с разнонаправленными разрывами, направления которых необходимо правильно определить. Каждый разрыв кольца может иметь одно из восьми направлений, что позволяет задавать в целом произвольные оптотипы для решения визуальных задач с уникальным ключом. Приняты следующие наименования и обозначения направлений разрывов: верхний (Т), верхний правый (TR), правый (R), нижний правый (BR), нижний (В), нижний левый (BL), левый (L), верхний левый (TL). Размеры разрывов колец приведены в таблице 1, начиная от самого большого (внешнего) до самого маленького (внутреннего).
Таблица 1
Номер кольца | Размер разрыва, мм | Соответствие остроте зрения человека с расстояния 3 м, % |
1 | 20,0 | 5 |
2 | 8,0 | 11 |
3 | 3,2 | 27 |
4 | 1,3 | 67 |
5 | 0,5 | 175 |
6.7 Хронограф
Для измерения времени выполнения роботом заданий по маневрированию и определению визуальной четкости изображения необходимо использовать хронограф.
6.8 Синхронизированные по времени часы
Для определения и измерения задержки и потери данных из-за ухудшения качества радиосвязи могут быть использованы двое синхронизированных по времени цифровых часов. Проблемы, связанные с задержкой и потерей данных, могут длиться в течение нескольких секунд, что повышает сложность выполнения заданий роботом. Одни синхронизированные по времени часы следует разместить у дисплея удаленного рабочего места оператора, а другие синхронизированные по времени часы следует разместить так, чтобы они попали в поле зрения камеры робота, когда робот направлен на цель. Синхронизированные по времени часы, установленные у целей, должны быть достаточно большого размера, чтобы их было видно на дисплее удаленного рабочего места оператора с целью сравнения показаний с часами, расположенными у дисплея удаленного рабочего места оператора.
6.9 Камера получения стоп-кадра
Допускается использовать камеру получения стоп-кадра для регистрации изображения на экране дисплея удаленного рабочего места оператора при каждом выравнивании робота с направлением на цель, чтобы иметь возможность графического документирования как правильности выравнивания, так и оценки визуальной четкости изображения, фиксируя статические примеры ухудшения качества видео. Данная камера должна быть достаточно качественной, чтобы не вносить дополнительных искажений в изображение при его регистрации. Кроме того, для оценки может использоваться скриншот дисплея удаленного рабочего места оператора. Однако изображения, снятые роботом, но не переданные по каналу радиосвязи, не могут использоваться для оценки. Если на удаленном рабочем месте оператора существует возможность записи внешнего видеосигнала, то такая запись должна быть обозначена как "потоковое видео", чтобы при просмотре было понятно, что это не запись с экрана дисплея удаленного рабочего места оператора (например, если экран дисплея небольшой или имеет низкое разрешение, то это снижает визуальную четкость изображения, получаемого роботом). Любое видео, снятое роботом, но не переданное по каналу радиосвязи, не может быть использовано для оценки.
6.10 Две видеокамеры
Для выявления едва заметных проблем, связанных с задержками и потерей данных из-за ухудшения качества радиосвязи и для более четкой фиксации рабочих характеристик канала связи, могут быть использованы две видеокамеры, ведущие синхронную запись удаленного рабочего места оператора и действий робота. В поле зрения обеих камер должны находиться синхронизированные по времени часы, чтобы после окончания испытаний можно было синхронизировать две видеозаписи. В поле зрения камер должны находиться перечисленные ниже объекты.
6.10.1 Камера 1: Экран дисплея удаленного рабочего места оператора, руки оператора для регистрации всех посылаемых роботу команд, синхронизированные по времени цифровые часы и интерактивная доска или страничный экран, представленные в 6.11. Обычно для этого достаточно установить камеру на штативе за плечом оператора.
6.10.2 Камера 2: Робот, выполняющий задания по маневрированию с достаточной детализацией, позволяющей точно определить, не отклоняется ли робот от линии кругового маршрута. Если используется переносная камера, то оператор не должен перекрывать прямую видимость между удаленным рабочим местом оператора и роботом.
6.11 Интерактивная доска или страничный экран
Допускается применять интерактивную доску или страничный экран, содержащие основную информацию, связанную с испытаниями, в виде документальных изображений или видео. К основной информации относятся, по крайней мере, дата, местонахождение, конфигурация робота, код оператора, а также расстояние до центра кругового маршрута робота.
6.12 Ослабление сигнала
В процессе реальной эксплуатации часто возникает неизбежное ослабление сигнала радиосвязи. Размещение рабочего места оператора в бронированном транспортном средстве является примером значительного ослабления сигнала радиосвязи в зоне прямой видимости. Разные варианты испытаний по данному методу могут быть проведены при размещении рабочего места оператора внутри бронированного транспортного средства, позволяющие определить максимальную дальность радиосвязи в зоне прямой видимости при открытых и закрытых люках, при прохождении сигнала радиосвязи через лобовое стекло или по иному пути, при включенном или выключенном двигателе. Конкретные конфигурации размещения оборудования и прохождения сигнала должны быть отмечены в протоколе испытаний.
7 Требования безопасности
7.1 Для безопасной работы робота в режиме дистанционного управления или в автономном режиме необходимо наличие систем аварийного останова. Кнопка аварийного останова на операторском пульте управления должна быть четко обозначена и легко доступна. Если на корпусе робота предусмотрена кнопка аварийного останова, то она должна быть четко обозначена. До начала испытаний все участники испытаний должны понять, где расположены кнопки аварийного останова.
7.2 Системы аварийного останова должны функционировать еще до того, как дистанционно управляемый робот начнет перемещение. Между роботом и оператором необходима постоянная связь до тех пор, пока робот не окажется внутри испытательного стенда, а люди либо покинут испытательный стенд, либо отойдут от робота на безопасное расстояние. Когда удаленно расположенный оператор начинает управлять роботом, приводит в действие манипулятор или передает какие-либо иные команды управления, он может не знать, что кто-то в это время работает с роботом. Поэтому, если только робот не отключен полностью, запрещается находиться непосредственно на пути возможного движения робота, перед ним или сзади него, а также в пределах досягаемости манипулятора.
7.3 Испытания, проводимые при ухудшении условий радиосвязи с роботом, повышают вероятность неправильных действий, включая непредвиденные движения робота и его манипулятора. Для снижения риска участники испытаний должны носить надлежащую обувь и использовать средства индивидуальной защиты. При обслуживании робота или его переноске в пределах испытательного стенда необходимо соблюдать внимательность и осторожность. Для обеспечения безопасности находящихся рядом людей может потребоваться установка дополнительной инфраструктуры, например защитных стен, ограждений и других средств, препятствующих доступу людей в рабочее пространство.
8 Порядок проведения испытаний
8.1 Идентификация конфигурации робота
Конфигурация предъявленного для испытаний робота должна быть идентифицирована и иметь уникальные обозначения (например, марка, модель, исполнение), включая все подсистемы и компоненты с их характеристиками и функциями. Конфигурация робота должна соответствовать конфигурации, которая требуется при использовании робота по назначению. Данная модель робота может иметь несколько различных конфигураций. Испытаниям может быть подвергнуто любое число конфигураций. Конфигурация робота должна оставаться неизменной во всех проводимых испытаниях, чтобы можно было напрямую сравнивать характеристики и выявлять преимущества и недостатки разных конфигураций робота. В целом, конфигурация испытуемого робота должна сохранять свой общий объем, массу и центр тяжести, а также состав основных подсистем и компонентов, таких как гусеницы, колеса, ноги, манипулятор, радиосвязь, кабель, операторский пульт управления и т.д. Документация должна содержать подробные фотографии всего вышеперечисленного, а также видеозаписи работ по техническому обслуживанию, таких как замена гусеницы, замена батареи и т.д. Если в ходе испытаний конфигурация робота изменяется, то это должно быть зафиксировано и рассматриваться как новая конфигурация, которая должна пройти все испытания с самого начала. Дополнительная информация приведена в ГОСТ Р 60.6.3.25 и ГОСТ Р 60.6.3.26. Ниже перечислены некоторые элементы конфигурации, имеющие отношение к данному методу испытаний.
8.1.1 Масса и габаритные размеры всех контейнеров, прибывших на место проведения испытаний или подготовленных к развертыванию робота.
8.1.2 Список элементов, необходимых для обеспечения функционирования, таких как батареи, зарядные устройства и расходные материалы.
8.1.3 Список инструментов и запасных частей, необходимых для сервисного и технического обслуживания робота.
8.1.4 Дополнительные полезные нагрузки.
8.1.5 Направленные антенны. Использование направленных антенн не запрещено, если они входят в состав исходной конфигурации и используются в ходе проведения любого испытания для оценки рабочих характеристик. Антенна, расположенная на удаленном рабочем месте оператора, является стационарной, поэтому в данном случае существует возможность использовать преимущества направленной антенны. Однако робот выполняет задания, предполагающие разные направления движения, поэтому направленная антенна может оказаться бесполезной.
8.1.6 Настройки программного обеспечения. Данный метод испытаний особо чувствителен к изменениям конфигурации программного обеспечения. К настройкам, которые могут повлиять на качество связи, относятся: включение/отключение нескольких видеопотоков, разрешающая способность видеопотока, поддерживающие возможности, режимы экономии энергии, разные частоты передачи данных, схемы модуляции, типы антенны, усиление антенны и т.д. Все настройки необходимо зафиксировать в протоколе испытаний и соотнести их с результатами для целей сравнения. Исключением является случай, когда оператор должен дистанционно устанавливать настройки программного обеспечения робота с удаленного рабочего места оператора, не прикасаясь к роботу, либо когда робот автоматически адаптирует и настраивает свое программное обеспечение без вмешательства оператора.
8.1.7 Узлы ячеистой сети. Если узлы ячеистой сети входят в состав конфигурации робота, то данный метод испытаний определяет максимальную дальность радиосвязи в зоне прямой видимости для конечного канала ячеистой сети между последним повторителем и роботом. Если в состав конфигурации робота входят узлы с подключаемыми повторителями, то такие узлы с повторителями должны быть включены и размещены на рабочем месте оператора или за ним в надлежащей рабочей конфигурации до начала проведения испытаний. Ни один из узлов с повторителями не должен быть расположен к роботу ближе, чем удаленное рабочее место оператора. Если узлы с повторителями составляют значительную (более 10%) часть общей массы или объема робота, то необходимо выполнить испытания маневренности робота в двух конфигурациях - со всем комплектом узлов с повторителями и без узлов с повторителями на борту. Во всех протоколах испытаний необходимо указать, какое количество узлов с повторителями находилось на борту робота во время конкретных испытаний.
8.2 Подготовка испытательного стенда
8.2.1 В качестве осевой линии на испытательном стенде следует использовать имеющуюся разметку или измерительную ленту, проложенную от предполагаемого места размещения кругового маршрута робота за пределы максимальной дальности радиосвязи в зоне прямой видимости испытуемого робота (см. рисунки 1 и 2).
8.2.2 Необходимо разметить круговой маршрут робота с радиусом 3 м и центром, расположенным на одном из концов осевой линии (см. рисунки 1 и 2).
8.2.3 В центре кругового маршрута робота необходимо взаимно перпендикулярно установить четыре цели с нанесенными оптотипами для проверки визуальной четкости изображения (см. рисунки 2 и 4). Цель A следует совместить с осевой линией в направлении рабочего места оператора. Кроме того, необходимо обеспечить, чтобы высота расположения целей позволяла роботу при правильной ориентации увидеть внешнее кольцо, нанесенное на внутренней поверхности основания цели. При этом оптотипы для оценки визуальной четкости изображения должны быть расположены прямо, а расположение разрывов в кольцах Ландольта отображено в протоколе испытаний.
8.2.4 На линии кругового маршрута робота необходимо нанести четыре метки в местах, где роботу следует выполнить поворот в направлении цели. Две точки пересечения кругового маршрута робота с осевой линией должны быть совмещены с направлениями на цели A и C, а две другие метки - с направлениями на цели B и D (см. рисунки 2 и 4).
8.2.5 На осевой линии, начиная от центра кругового маршрута робота, следует отмерить и нанести метки с шагом 6 м. На каждой метке вдоль осевой линии должно быть нанесено расстояние от центра кругового маршрута робота (см. рисунок 1).
8.2.6 Необходимо проверить готовность хронографа к измерению времени выполнения роботом каждого из заданий по маневрированию и оценке визуальной четкости изображения.
8.3 Подготовка робота и оператора к проведению испытаний
8.3.1 Робот должен быть установлен в точке пересечения линии круговой траектории робота и осевой линии и ориентирован так, чтобы камера переднего вида, расположенная на шасси или над шасси робота, была направлена на цель А. Для получения большего количества баллов за четкость изображения можно использовать камеру с увеличением, при ее наличии. Можно использовать камеру манипулятора, но она должна быть расположена в указанном выше месте и направлена вперед над шасси робота при ориентации робота на каждую цель. Высота расположения целей должна обеспечивать размещение внешнего кольца оптотипа в поле зрения камеры при правильной ориентации робота (см. рисунок 4). При проведении испытания следует использовать одну и ту же камеру для оценки визуальной четкости изображения. Максимальная высота расположения антенны робота не должна превышать 2 м.
8.3.2 Удаленное рабочее место оператора и его антенна должны быть установлены на ближайшей отметке на осевой линии, т.е. на расстоянии 6 м от центра кругового маршрута робота, что соответствует идеальным условиям для радиосвязи (см. рисунок 2). Максимальная высота антенны рабочего места оператора не должна превышать 2 м.
8.3.3 Оператор должен быть проинструктирован о порядке проведения испытаний и о действиях, которые необходимо выполнять при неисправности робота или вынужденной приостановке испытаний (см. 8.7).
8.3.4 Оператор должен иметь возможность попрактиковаться в выполнении маневрирования и заданий по оценке визуальной четкости изображения в условиях идеальной радиосвязи до начала проведения испытаний на большем расстоянии, что позволит оператору полностью ознакомиться с порядком проведения испытаний, а также оценить базовые характеристики робота в условиях идеальной радиосвязи. Сначала оператор должен попробовать выполнять задания, напрямую наблюдая за поведением робота на испытательном стенде. Затем он должен выполнить те же задания, используя только свое рабочее место, как если бы робот находился вне зоны прямой видимости (см. рисунок 7).
Задания по маневрированию (5 баллов) и оценке четкости изображения (20 баллов) Начать с удержания робота на линии окружности при движении от A к D. Робот должен быть направлен на цель А. Движение по окружности (зеленый цвет): 1 Удерживать робота на линии окружности по всему маршруту (360°), проходя по порядку отметки для целей A, B, C и D. Остановить робота у отметки перед целью A. Движение по окружности с остановками у каждой цели (желтый цвет): 2 Повернуть к центру и направить на цель A. Считать кольца для оценки четкости изображения, начиная с внешнего (от 1 до 5 баллов). 3 Двигаться по окружности до отметки у цели B. Повернуть к центру и направить на цель B. Считать кольца для оценки четкости изображения, начиная с внешнего (от 1 до 5 баллов). 4 Двигаться по окружности до отметки у цели C. Повернуть к центру и направить на цель C. Считать кольца для оценки четкости изображения, начиная с внешнего (от 1 до 5 баллов). 5 Двигаться по окружности до отметки у цели D. Повернуть к центру и направить на цель D. Считать кольца для оценки четкости изображения, начиная с внешнего (от 1 до 5 баллов). |  |
Рисунок 7 - Последовательность действий при выполнении роботом заданий с разных направлений, включая задания по маневрированию и оценке визуальной четкости изображения
8.3.5 Необходимо определить число попыток (от 10 до 30), которые необходимо выполнить для достижения заданных значений надежности и достоверности полученных результатов (см. 9.1).
8.3.6 При использовании синхронизированных по времени часов по 6.8 необходимо проверить до начала испытаний, что видеокамеры и робот направлены на синхронизированные по времени часы, чтобы иметь возможность впоследствии синхронизировать видеозаписи. Следует убедиться, что время на часах синхронизировано.
8.4 Порядок выполнения заданий по маневрированию робота и оценке визуальной четкости изображения
8.4.1 Робот должен быть установлен на линии окружности между метками, соответствующими целям A и D. Робот должен быть направлен в сторону метки для цели A и готов к выполнению задания двигаться по круговому маршруту в направлении по часовой стрелке.
8.4.2 Далее следует включить хронограф и режим записи на видеокамерах, используемых дополнительно по 6.9, 6.10.
8.4.3 Робот должен двигаться без остановок по круговому маршруту вдоль нанесенной линии, пройдя все 360° окружности (зеленая стрелка на рисунке 7):
Задание 1 - отслеживание нанесенной линии по всей окружности. Робот должен постоянно находиться на нанесенной линии вдоль всего кругового маршрута, последовательно проходя метки, соответствующие целям A, B, C и D. Робот должен остановиться на окружности у метки, соответствующей цели A. Один балл за маневрирование дается, если робот удержался на линии окружности на протяжении всех 360°, двигаясь согласно зеленой стрелке на рисунке 7.
8.4.4 Робот, двигаясь по окружности, должен поочередно повернуться ко всем четырем целям (желтые стрелки на рисунке 7):
8.4.4.1 Задание 2 - поворот к цели A. Робот должен совершить необходимые движения, чтобы повернуться на 90° вправо по направлению к центру кругового маршрута, при этом точки контакта робота с поверхностью должны находиться вне линии окружности (см. рисунок 2). Далее следует оценить выравнивание робота с целью А с помощью установленной на роботе камеры, которая должна передать на рабочее место оператора изображение всего внешнего кольца оптотипа цели A (см. рисунок 4). За правильное выравнивание камеры робота с оптотипом цели A дается один балл за маневрирование. После выравнивания камера робота должна передать на рабочее место оператора изображение колец Ландольта на оптотипе цели A для оценки визуальной четкости переданного изображения. За каждое правильное определение оператором направления разрыва кольца дается один балл за визуальную четкость. Всего можно получить до пяти баллов (см. рисунок 6).
8.4.4.2 Задание 3 - поворот к цели B. Робот должен доехать до надлежащей метки, повернуться к цели B и передать изображение оптотипа цели B на рабочее место оператора для оценки визуальной четкости. Один балл дается за маневрирование при правильном позиционировании робота относительно цели и до пяти баллов можно получить за визуальную четкость изображения.
8.4.4.3 Задание 4 - поворот к цели C. Робот должен доехать до надлежащей метки, повернуться к цели C и передать изображение оптотипа цели C на рабочее место оператора для оценки визуальной четкости. Один балл дается за маневрирование при правильном позиционировании робота относительно цели и до пяти баллов можно получить за визуальную четкость изображения.
8.4.4.4 Задание 5 - поворот к цели D. Робот должен доехать до надлежащей метки, повернуться к цели D и передать изображение оптотипа цели D на рабочее место оператора для оценки визуальной четкости. Один балл дается за маневрирование при правильном позиционировании робота относительно цели и до пяти баллов можно получить за визуальную четкость изображения.
8.4.5 Необходимо подсчитать общее количество баллов за маневрирование и визуальную четкость по отдельности, а также среднее количество баллов за визуальную четкость при успешном выравнивании с оптотипами. Затраченное время следует зарегистрировать только в том случае, если все задания по маневрированию выполнены успешно, а результаты выполнения задания по оценке визуальной четкости изображения соответствуют базовым характеристикам.
8.5 Проведение испытаний
8.5.1 Робот должен выполнить задания по маневрированию и оценке визуальной четкости изображения, когда рабочее место оператора и установленная на нем антенна находятся на расстоянии 6 м от центра кругового маршрута робота (см. рисунок 7). При этом оператор должен быть обращен спиной к целям и роботу, как если бы данные действия выполнялись вне зоны прямой видимости. Необходимо зафиксировать среднее значение оценки визуальной четкости и время, затраченное на выполнение всех заданий. Эти значения принимают за базовые характеристики маневрирования и визуальной четкости системы в пределах зоны идеальной радиосвязи.
8.5.2 Далее рабочее место оператора и его антенну необходимо переместить вдоль осевой линии в направлении от кругового маршрута робота на метку, расположенную непосредственно перед местом, где ожидается очевидная потеря видеоданных или команд управления (см. рисунок 1). Необходимо выполнить раздельно хронометрируемые задания по маневрированию и оценке визуальной четкости изображения, чтобы оценить ухудшение характеристик из-за проблем с радиосвязью (см. рисунок 7). Следует зафиксировать все успешно выполненные задания по маневрированию и среднюю оценку визуальной четкости изображения для всех успешных выравниваний робота с целями. Если испытание выполнено не полностью, то затраченное время можно не регистрировать.
Примечание - Если испытательный стенд имеет длину, недостаточную для определения максимальной дальности, то расстояние, на котором все задания были успешно выполнены, можно зафиксировать как "измеренное расстояние радиосвязи в зоне прямой видимости на данном испытательном стенде".
8.5.3 Необходимо выполнять все раздельно хронометрируемые задания по маневрированию и оценке визуальной четкости изображения, дискретно уменьшая расстояние до целей с шагом 6 м, до тех пор, пока все задания не будут успешно выполнены (см. рисунки 2 и 7). Данное расстояние принимают за максимальную дальность радиосвязи в зоне прямой видимости. Необходимо зарегистрировать расстояние, среднее значение оценки визуальной четкости изображения по всем четырем целям, а также затраченное время, как показатель эффективности (см. 9.1).
8.6 Порядок действий при ошибке робота
Если робот застрял или вышел из строя и для продолжения испытаний требуется какое-либо визуальное или физическое вмешательство, либо если робот повредил испытательное оборудование так, что требуется его регулировка или ремонт, то необходимо выполнить такую последовательность действий:
8.6.1 Остановить хронограф.
8.6.2 Зафиксировать время и место, а также кратко описать случившееся.
8.6.3 Зарегистрировать данную попытку как неудачную.
8.6.4 Проверить состояние испытательного оборудования и, при необходимости, произвести необходимый ремонт.
8.6.5 Проверить, сможет ли робот продолжить испытания и, при необходимости, выполнить его техническое обслуживание, не изменяя конфигурацию робота.
8.6.6 Переместить робота обратно на стартовую позицию с заданной ориентацией.
8.6.7 Повторить выполнение данной попытки.
8.7 Вынужденная приостановка испытаний
Если испытания требуется приостановить по любой причине, кроме неисправности робота, то необходимо выполнить такую последовательность действий:
8.7.1 Остановить хронограф и запись на видеокамерах, используемых дополнительно по 6.9, 6.10.
8.7.2 Зафиксировать время, место и причину вынужденной остановки (если необходимо).
8.7.3 Проверить состояние испытательного оборудования и, при необходимости, произвести необходимый ремонт.
8.7.4 Проверить, сможет ли робот продолжить испытания, и если выход из строя робота вызван поломкой испытательного оборудования, то выполнить необходимое техническое обслуживание, не изменяя конфигурацию робота.
8.7.5 Когда робот будет готов продолжить работу, перезапустить хронограф и запись на видеокамерах, используемых дополнительно по 6.9, 6.10.
8.7.6 Продолжить выполнение заданий до завершения испытаний.
8.8 Программный сброс
Любая ручная или автоматическая перезагрузка программного обеспечения рабочего места оператора или дистанционная перезагрузка программного обеспечения робота должны быть отмечены в протоколе испытаний, если это требует вмешательства оператора либо влияет на рабочие характеристики.
9 Оценка и интерпретация результатов
При оценке результатов испытаний следует учитывать четыре показателя, представленные ниже в порядке уменьшения важности.
9.1 Дальность радиосвязи в зоне прямой видимости (основной показатель)
Данный показатель представляет максимальное расстояние устойчивой радиосвязи в зоне прямой видимости, выраженное в метрах, на котором все задания по маневрированию и оценке визуальной четкости изображения были завершены успешно в ходе выполнения статистически значимого числа попыток. Задания по оценке визуальной четкости изображения считаются выполненными успешно, если полученные оценки соответствуют базовым характеристикам.
9.2 Надежность выполнения задания
Если выполнено статистически значимое числе попыток, то отношение числа успешных попыток к общему числу выполненных попыток является оценкой надежности выполнения задания. Надежность выполнения задания в процентах рассчитывают по следующей формуле:
Заказчик испытаний может установить необходимые пороговые значения надежности выполнения задания. Для одних заданий может требоваться более высокая надежность, а для других требования по надежности могут быть менее жесткими. Например, чтобы продемонстрировать не менее 80% надежности (при достоверности не ниже 80%), результаты испытаний должны быть следующими:
- 10 последовательных попыток без ошибок (только первые 10 попыток),
- 20 последовательных попыток при не более чем одной ошибке,
- 30 последовательных попыток при не более чем трех ошибках.
Если проводится несколько испытаний, то при определении соотношения успешных попыток к числу неудачных попыток следует рассматривать вместе последние 30 последовательных попыток в каждом из испытаний. Это позволит компенсировать неудачные попытки последующим набором успешных попыток. Уровень надежности и достоверности, рассчитываемый как соотношение успешных и неудачных попыток, можно определить на основе статистических таблиц.
9.3 Средняя оценка визуальной четкости изображения
Данный показатель характеризует среднее значение визуальной четкости во всех успешно выполненных попытках выравнивания робота с целями, выраженное в миллиметрах. Он также может быть выражен в процентах человеческого зрения (см. 6.6). Каждый оптотип содержит пять концентрических колец с разрывами уменьшающегося диаметра, и за правильное определение места разрыва дается один балл. На испытательном оборудовании установлены четыре цели с оптотипами, за каждую из которых может быть начислено до пяти баллов. Общее максимальное число баллов, которые могут быть получены за одну попытку, равно 20. Средняя оценка четкости соответствует общему числу правильно распознанных разрывов в кольцах Ландольта во всех успешно выполненных попытках, деленному на общее число оптотипов.
9.4 Эффективность
Эффективность завершенных и успешных испытаний рассчитывают с целью определения незначительных различий в возможностях роботов или в уровне квалификации операторов дистанционного управления. Показателем эффективности является среднее число успешных попыток, выполненных за отведенное время (в минутах и секундах). Эффективность рассчитывают по следующей формуле:
(число успешных попыток/время в минутах) = число попыток в минуту.
Затраченное время на выполнение части заданий не фиксируют, так как число выполненных заданий может варьироваться в широких пределах.
10 Требования к отчетности
10.1 Используя записи результатов испытаний, можно проводить сравнения во времени для данного робота и оператора, для разных конфигураций роботов или для разных роботов в разных местах. В протоколе испытаний, помимо отмеченных ранее параметров конфигурации, рекомендуется указывать перечисленную ниже информацию.
10.1.1 Наименование метода испытаний: Радиосвязь в зоне прямой видимости.
10.1.2 Обозначение настоящего стандарта: ГОСТ Р 60.6.3.12.
10.1.3 Дату проведения испытаний.
10.1.4 Место: наименование организации или полигона, где проводят испытания.
10.1.5 Адрес: населенный пункт, район, область, где проводят испытания.
10.1.6 Фамилию и инициалы руководителя испытаний, должность и организацию, которую он представляет.
10.1.7 Наименование организации - изготовителя робота.
10.1.8 Наименование модели робота.
10.1.9 Цифровой или буквенно-цифровой код, обозначающий конфигурацию робота.
10.1.10 Фамилию и инициалы оператора, управляющего роботом, наименование организации, которую он представляет, и контактную информацию.
10.1.11 Условия внешней среды (уровень освещенности, температура, влажность и другие применимые условия).
10.1.12 Радиочастотный спектр.
10.1.13 Результаты (дальность, эффективность).
10.1.13.1 Расстояние, при котором все задания были успешно выполнены.
10.1.13.2 Среднюю оценку визуальной четкости изображения по всем оптотипам.
10.1.13.3 Затраченное время на успешное выполнение всех заданий.
10.1.14 Тип ошибки.
10.1.14.1 Ошибка робота (робот застрял или вышел из строя, что требует визуального или физического вмешательства для продолжения испытаний).
10.1.14.2 Программный сброс (перезагрузка программного обеспечения блока управления или дистанционная перезагрузка робота).
10.1.14.3 Вынужденная приостановка (испытания приостановлены по любой причине, кроме ошибки робота).
10.1.15 Примечания (любые наблюдения и отмеченные отклонения при проведении испытаний).
10.2 Пример протокола испытаний приведен на рисунке 8.
11 Погрешность метода испытаний
Результатом испытаний по данному методу является не содержащий количественных показателей отчет об успешном или неудачном достижении заданных значений надежности. Испытательный стенд обеспечивает четкую фиксацию успешной или неудачной попытки, поэтому субъективность человеческой оценки результатов значительной роли не играет. Поскольку результаты испытаний не являются количественными, то невозможно сделать вывод о том, насколько точные результаты обеспечивает данный метод испытаний.
12 Погрешность измерения
Использование данного метода испытаний для определения дальности радиосвязи в зоне прямой видимости дает в результате погрешность не более 3 м, что соответствует половине расстояния между соседними метками на осевой линии, на которых устанавливают рабочее место оператора при проведении испытаний. Более точное определение дальности радиосвязи является несущественным для данного метода испытаний.
Протокол испытаний
Радиосвязь в зоне прямой видимости (по ГОСТ Р 60.6.3.12)
 |
Рисунок 8 - Пример протокола испытаний
Приложение ДА
(справочное)
Сведения о соответствии ссылочных национальных стандартов стандартам, использованным в качестве ссылочных в примененном стандарте
Таблица ДА.1
Обозначение ссылочного национального стандарта | Степень соответствия | Обозначение и наименование ссылочного стандарта |
ГОСТ Р 60.6.3.1 | MOD | ASTM E2521-16 "Стандартная терминология для оценки возможностей роботов для работы в экстремальных условиях" |
ГОСТ Р 60.6.3.16 | MOD | ASTM E2566-17а "Стандартный метод испытаний для оценки средств очувствления роботов для работы в экстремальных условиях. Острота зрения" |
ГОСТ Р 60.6.3.25 | MOD | ASTM E2592-16 "Общепринятая практика оценки возможностей роботов для работы в экстремальных условиях. Логистика. Упаковка оперативного запаса оборудования городских поисково-спасательных подразделений" |
Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - MOD - модифицированные стандарты. | ||
УДК 621.865.8:007.52:006.354 | ОКС 13.200 25.040.30 |
Ключевые слова: роботы, робототехнические устройства, роботы для работы в экстремальных условиях, методы испытаний, радиосвязь, зона прямой видимости, порядок проведения испытаний, испытательное оборудование, операторский пульт управления, рабочее место оператора | |
{kind=link}