ГОСТ Р 60.6.3.26-2023
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
МЕТОДЫ ИСПЫТАНИЙ СЕРВИСНЫХ МОБИЛЬНЫХ РОБОТОВ ДЛЯ РАБОТЫ В ЭКСТРЕМАЛЬНЫХ УСЛОВИЯХ
Логистика. Конфигурация робототехнического комплекса
Robots and robotic devices. Test methods for service mobile robots for work in extreme conditions. Logistics. Robotic system configuration
ОКС 13.200
25.040.30
Дата введения - 2024-01-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным автономным научным учреждением "Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики" (ЦНИИ РТК) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 "Робототехника"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 сентября 2023 г. N 862-ст
4 Настоящий стандарт является модифицированным по отношению к стандарту ACTM E3132/E3132M-17* "Общепринятая практика по оценке логистических характеристик роботов для работы в экстремальных условиях: Конфигурация системы" (ASTM E3132/E3132M-17 "Standard practice for evaluating response robot logistics: System configuration", MOD) путем внесения технических отклонений, объяснение которых приведено во введении к настоящему стандарту.
Наименование настоящего стандарта изменено относительно наименования указанного стандарта для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5) и для увязки с наименованиями, принятыми в существующем комплексе национальных стандартов Российской Федерации.
Сведения о соответствии ссылочных национальных стандартов стандартам, использованным в качестве ссылочных в примененном стандарте, приведены в дополнительном приложении ДБ
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
Введение
Требования стандартов комплекса ГОСТ Р 60 распространяются на роботы и робототехнические устройства. Их целью является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов, узлов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: "Общие положения, основные понятия, термины и определения", "Технические и эксплуатационные характеристики", "Безопасность", "Виды и методы испытаний", "Механические интерфейсы", "Электрические интерфейсы", "Коммуникационные интерфейсы", "Методы моделирования и программирования", "Методы построения траектории движения (навигация)", "Конструктивные элементы". Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации - промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам, сервисным мобильным роботам, а также к морским робототехническим комплексам.
Настоящий стандарт относится к тематической группе "Виды и методы испытаний" и распространяется на сервисные мобильные роботы, предназначенные для работы в экстремальных условиях. Настоящий стандарт устанавливает требования к определению и документированию конфигурации робототехнических комплексов.
Настоящий стандарт является модифицированным по отношению к стандарту АСТМ Е3132/Е3132М-17, разработанному техническим комитетом Е54 ASTM International "Прикладные системы для национальной безопасности" в соответствии с принципами стандартизации, установленными в Решении о принципах разработки международных стандартов, руководств и рекомендаций Комитета по техническим барьерам в торговле Всемирной торговой организации, для приведения его в соответствие с требованиями основополагающих национальных и межгосударственных стандартов.
В настоящий стандарт внесены следующие технические отклонения по отношению к стандарту АСТМ Е3132/Е3132М-17:
- не включены примечания и сноски примененного стандарта, которые нецелесообразно применять в российской национальной стандартизации в связи с их содержанием, имеющим справочный характер и относящимся к системе стандартизации США;
- значения физических величин указаны только в Международной системе единиц (СИ), используемой в российской национальной стандартизации в соответствии с требованиями ГОСТ 8.417-2002, тогда как в примененном стандарте значения измерений указаны как в системе единиц СИ, так и в американских единицах (дюйм-фунт); соответственно пункт 1.4 примененного стандарта об использовании двух систем единиц измерения не включен в настоящий стандарт;
- пункт 1.6 примененного стандарта не включен в настоящий стандарт, так как его содержание приведено во введении;
- в раздел 2 "Нормативные ссылки" не включены стандарты АСТМ Е2830, АСТМ Е2854 и АСТМ Е2855, ссылки на которые отсутствуют в тексте примененного стандарта;
в соответствии с ГОСТ Р 1.7-2014, ГОСТ 1.3-2014, ГОСТ Р 1.5-2012 и ГОСТ 1.5-2001 включен раздел 3 "Термины и определения" вместо использованного в примененном стандарте раздела 3 "Терминология", а термины, перечисленные в разделе 3 примененного стандарта, приведены с их определениями, установленными в гармонизированных национальных стандартах;
- терминологические статьи расположены в алфавитном порядке русского языка для обеспечения соответствия требованиям ГОСТ 1.5-2001;
- в раздел 3 добавлены определения терминов "комплектующее изделие", "конфигурация" и "составная часть", имеющих непосредственное отношение к данному стандарту;
- примечание к пункту 4.1 исключено, чтобы не дублировать информацию, указанную в разделе 5;
- рисунки 4-6 примененного стандарта вынесены в дополнительное приложение ДА, чтобы у разработчиков технической документации роботов была возможность ссылаться в конструкторских документах на данное приложение в соответствии с ГОСТ Р 2.105-2019 (пункт 6.11.2); соответственно нумерация рисунков 7 и 8 изменена на 4 и 5, рисунки 9-11 примененного стандарта, относящиеся к системе стандартизации США, которые нецелесообразно применять в российской национальной стандартизации, не приведены;
- нумерация пункта 8.4.1 примененного стандарта исключена в настоящем стандарте в соответствии с требованиями ГОСТ 1.5-2001 (пункт 4.2.3);
- ключевые слова приведены в библиографических данных в соответствии с ГОСТ 1.5-2001 вместо раздела 10 "Ключевые слова" в примененном стандарте.
1 Область применения
1.1 Настоящий стандарт устанавливает метод идентификации и документирования конфигурации проходящих испытания робототехнических комплексов для работы в экстремальных условиях. Конфигурация робототехнического комплекса содержит основные массогабаритные параметры, перечень комплектующих изделий комплекса, а также время, необходимое для приведения комплекса в работоспособное состояние и его технического обслуживания.
1.2 Требования настоящего стандарта распространяются на наземные, воздушные и морские робототехнические комплексы для работы в экстремальных условиях, дистанционно управляемые оператором, находящимся на расстоянии, соответствующем выполняемому данным комплексом заданию. Подобные робототехнические комплексы могут обладать некоторыми дополнительными возможностями или работать в автономном режиме.
1.3 Испытания согласно данному методу могут быть проведены в любом месте, где можно воспроизвести необходимые условия внешней среды и установить испытательное оборудование.
1.4 Требования настоящего стандарта не распространяются на все проблемы безопасности, связанные с его применением, если таковые имеются. Пользователи настоящего стандарта отвечают за разработку необходимых мер безопасности и охраны здоровья, а также за определение применимости законодательных ограничений до использования настоящего стандарта.
2 Нормативные ссылки
В настоящем стандарте использована нормативная ссылка на следующий стандарт:
ГОСТ Р 60.6.3.25 Роботы и робототехнические устройства. Методы испытаний сервисных мобильных роботов для работы в экстремальных условиях. Логистика. Развертывание роботов после транспортирования
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочного стандарта в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1
автономность (autonomy): Способность выполнять задачи по назначению на основе текущего состояния и восприятия внешней среды без вмешательства человека. [ГОСТ Р 60.0.0.4-2023, статья 3.2] |
3.2
автономный режим работы: Режим работы, при котором мобильный робот получает задание от оператора или внешней системы управления, с которой взаимодействует, и выполняет его без дальнейшего взаимодействия с оператором или внешней системой. [ГОСТ Р 60.6.0.1-2021, статья 2] |
3.3
заказчик испытаний (test sponsor): Юридическое или физическое лицо, которое заказывает конкретное мероприятие по проведению испытаний и получает соответствующие результаты испытаний в заданной форме. [ГОСТ Р 60.6.3.1-2019, статья 2.4] |
3.4
испытательный комплект (test suite): Разработанная совокупность методов и технических средств испытаний, которые совместно используются для оценки рабочих характеристик или определения соответствия техническим требованиям конкретной подсистемы или функциональных возможностей робота для работы в экстремальных условиях. [ГОСТ Р 60.6.3.1-2019, статья 2.9] |
3.5
комплектующее изделие (component): Составная часть финального изделия, являющаяся конструктивно законченным стандартным или иным изделием (например, прибор, блок, модуль, узел и т.п.), необходимым для применения финального изделия по назначению и поставляемым по заказу лиц, осуществляющих создание, эксплуатацию и (или) ремонт финального изделия, либо самостоятельно создаваемым такими лицами. [ГОСТ Р 53394-2017, статья 3.5] |
3.6
конфигурация (configuration): Взаимосвязанные функциональные и физические характеристики продукции или услуги, установленные в данных о конфигурации. [ГОСТ Р ИСО 10007-2019, статья 3.1] |
3.7
мероприятие по проведению испытаний [(test) event]: Совокупность действий по планированию, подготовке и организации проведения испытаний, инициированных заказчиком испытаний, которые проводит испытательная организация на одном или нескольких заданных полигонах. [ГОСТ Р 60.6.3.1-2019, статья 2.13] |
3.8
операторский пульт управления; ОПУ [operator control unit (OCU)]: Устройство, используемое оператором для телеуправления роботом. [ГОСТ Р 60.6.3.10-2019, статья 3.7] |
3.9
протокол испытаний (test form): Документ, содержащий необходимые сведения об объекте испытаний, применяемых методах, средствах и условиях испытаний, результаты испытаний, а также заключение по результатам испытаний, оформленный в установленном порядке. [ГОСТ 16504-81, статья 24] |
3.10
робот (robot): Программируемый исполнительный механизм, обладающий определенным уровнем автономности и предназначенный для выполнения перемещения, манипулирования или позиционирования. Примечания 1 В состав робота входит система управления. 2 Примерами конструктивных разновидностей роботов являются манипулятор, мобильная платформа и носимый робот. [ГОСТ Р 60.0.0.4-2023, статья 3.1] |
3.11
робот для работы в экстремальных условиях (робот для аварийных работ) [emergency response robot (response robot)]: Робот, предназначенный для выполнения оперативных задач в различных рабочих режимах с целью оказания помощи оператору при выполнении работ в экстремальных условиях и опасных средах. Примечание - К некоторым основным характеристикам таких роботов относятся: дистанционное управление с безопасного, удаленного расстояния, эксплуатация на рабочих скоростях, способность работать в сложных условиях, достаточная защищенность от опасной среды, надежность и возможность обслуживания в полевых условиях, долговечность и экономическая эффективность, а также оснащенность средствами обеспечения безопасности. [ГОСТ Р 60.6.3.1-2019, статья 2.33] |
3.12
руководитель (испытаний) [(test) administrator]: Лицо, осуществляющее непосредственное руководство проведением испытаний. [ГОСТ Р 60.6.3.1-2019, статья 2.34] |
3.13
составная часть (part): Изделие, выполняющее определенные функции в составе другого изделия. [ГОСТ Р 53394-2017, статья 3.7] |
3.14
телеуправление (teleoperation): Управление в реальном времени движением робота, осуществляемое человеком дистанционно. Пример - Работа робота при обезвреживании бомб, сборке космической станции, подводных исследованиях и хирургических операциях. [ГОСТ Р 60.0.0.4-2023, статья 6.17] |
4 Краткое описание метода испытаний
4.1 Настоящий стандарт устанавливает требования к определению и документированию конфигурации робототехнических комплексов. Итоговая информация в виде краткого общего описания робото-технического комплекса предназначена для предоставления организациям, использующим сервисных роботов для работы в экстремальных условиях.
4.2 Предъявляемый для испытаний робототехнический комплекс должен быть полностью идентифицирован и иметь обозначение, наименование, исполнение и заводской номер, присвоенные изготовителем. Процесс идентификации включает измерение времени, необходимого для приведения комплекса в состояние готовности к работе, измерение и документирование габаритных размеров и массы самого робота, ОПУ, источников питания, запасных частей, инструментов и принадлежностей (ЗИП), транспортировочной упаковки и других комплектующих изделий робототехнического комплекса. Процесс идентификации также включает формирование перечня комплектующих изделий, рабочих органов и предметов, входящих в комплект ЗИП. В данный комплект входят инструменты и расходные материалы, такие как клейкая лента, кабельные стяжки и другие предметы, необходимые для технического обслуживания и ремонта робота в процессе эксплуатации. В протоколах испытаний также должны быть представлены подробные фотографии всех вышеперечисленных объектов, а также видеоролики, демонстрирующие выполнение стандартных работ по техническому обслуживанию (например, замена батарей). Конфигурация робототехнического комплекса должна оставаться неизменной в течение всех запланированных испытаний, чтобы можно было напрямую сравнивать рабочие характеристики и выявлять преимущества и недостатки разных конфигураций. Испытаниям может быть подвергнуто любое число идентифицированных конфигураций данного робототехнического комплекса.
5 Применение метода испытаний
5.1 Основными требованиями при разработке робототехнических комплексов для работы в экстремальных условиях, которые предназначены для повышения безопасности и эффективности деятельности использующих их сотрудников аварийно-спасательных подразделений или силовых ведомств, являются:
- реализация режима дистанционного управления роботом со стороны оператора, находящегося на безопасном расстоянии от зоны работы робота;
- быстрое приведение робототехнического комплекса в работоспособное состояние после транспортировки в зону развертывания;
- обеспечение функционирования робототехнического комплекса в сложных недетерминированных средах;
- достаточная защищенность от опасных внешних воздействий;
- возможность технического обслуживания как в стационарных, так и в полевых условиях;
- надежность и экономичность конструкции;
- реализация мер безопасности при эксплуатации.
5.2 Данный метод испытаний позволяет выполнить сравнение ожиданий и фактических возможностей для формирования понимания преимуществ и недостатков, присущих робототехническим комплексам определенной стоимости. Например, конструкция, предусматривающая установку на роботе нескольких аккумуляторных батарей, может повлиять на требуемую массу, продолжительность работы или стоимость. Соответствующий уровень понимания поможет сформулировать требования с учетом имеющихся возможностей и ограничений.
5.3 Настоящий стандарт обеспечивает заинтересованным сторонам четкое представление основных возможностей роботов, представленных количественными значениями рабочих характеристик. Это облегчает взаимосвязь между пользователями и изготовителями роботов. Настоящий стандарт может быть использован при решении перечисленных ниже задач.
5.3.1 Внедрение технических инноваций и стимулирование разработчиков реализовывать в своих изделиях комбинации возможностей, необходимых для выполнения основных задач, стоящих перед робототехническим комплексом.
5.3.2 Измерение и сравнение основных характеристик робототехнических комплексов. Выбор робота, обладающего оптимальными характеристиками для выполнения поставленных задач, определение наиболее значимых характеристик для совершенствования опытных образцов.
5.3.3 Принятие обоснованных решений о закупках роботов, проведение приемочных испытаний на основании полученных в результате воспроизводимых испытаний статистически значимых данных о возможностях роботов и сравнения полученных количественных результатов.
5.3.4 Подготовка операторов и оценка их профессионализма с помощью воспроизводимых практических заданий, позволяющих улучшать рабочие характеристики приводов, датчиков и интерфейсов с оператором. Настоящий стандарт позволит получать и сравнивать количественные показатели даже в условиях неконтролируемых переменных параметров окружающей среды, а также развивать, поддерживать, измерять и отслеживать быстро устаревающие с течением времени навыки операторов, а также проводить сравнение подготовки операторов между подразделениями, организациями или регионами.
5.4 Основными областями применения роботов для работы в экстремальных условиях являются проведение аварийно-спасательных работ и ликвидация последствий природных и техногенных катастроф, однако область применения настоящего стандарта может быть значительно шире. Возможность применения настоящего стандарта в других областях должны определить специалисты данных областей применения.
6 Испытательное оборудование
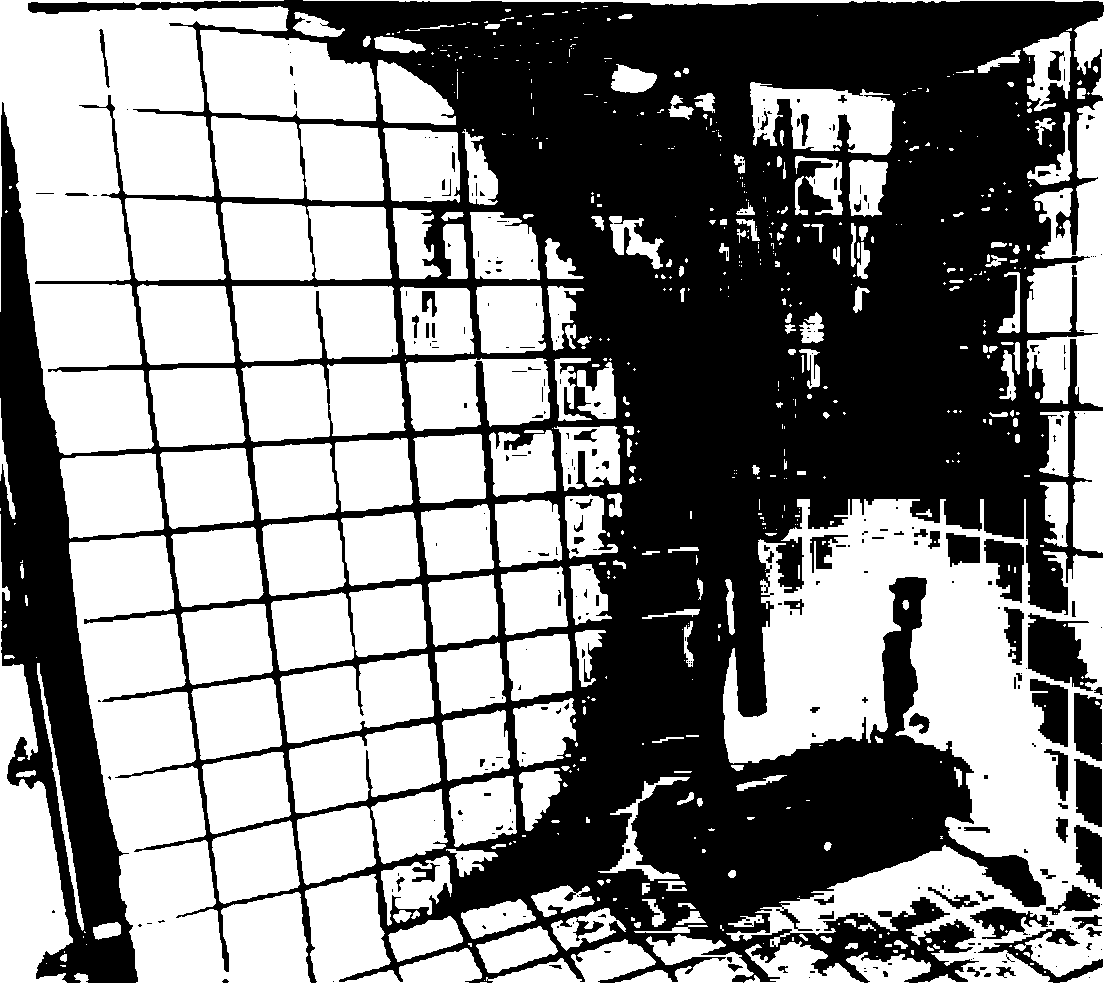
6.1 Для фотографирования испытуемого робототехнического комплекса следует использовать испытательный стенд, состоящий из двух стен и пола нейтрального цвета с нанесенной по всей поверхности сеткой с шагом 20 см, пример которого показан на рисунке 1. Испытательный стенд обычно изготавливают из имеющихся на рынке ориентированно-стружечных или древесноволокнистых плит.
 |
Рисунок 1 - Пример стенда, на котором робот может быть сфотографирован для документирования его конфигурации
6.1.1 Стены и пол стенда должны иметь размеры, превышающие размеры фотографируемого робота.
6.1.2 Фотографии должны быть выполнены цифровой однообъективной зеркальной фотокамерой с полной матрицей и диапазоном светочувствительности не менее 3200 единиц.
6.1.3 Фотокамера для снижения искажений перспективы и оптических искажений при фотосъемке, должна иметь объектив, соответствующий размерам помещения, где проводится фотографирование, и размерам фотографируемого робота.
6.1.4 Рекомендуется использовать студийное осветительное оборудование со вспышкой, энергия импульса которой должна быть не менее 500 Дж. Это позволяет использовать закрытую диафрагму (чтобы весь робот был в фокусе) и меньшую светочувствительность. Освещение должно быть рассеянным. Допускается использовать белое полотно на потолке и на двух открытых сторонах стенда, установив осветительное оборудование так, чтобы свет отражался от полотна, а не был направлен непосредственно на фотографируемый робототехнический комплекс.
6.1.5 Для полного документирования обязательных операций следует использовать надлежащее число видеокамер, как указано в разделе 8.
6.2 Для измерения массогабаритных параметров следует использовать коммерчески доступные весы и рулетки с ценой деления не менее одной десятой, как указано в разделе 8.
6.3 Для измерения времени выполнения обязательных операций следует использовать счетчики времени, например секундомеры. Проверить правильность задокументированного времени можно при просмотре видео.
7 Требования безопасности
7.1 Помимо указанного в 1.4, пользователи настоящего стандарта должны предусмотреть защиту от неправильного использования оборудования, а также выполнение других конкретных действий, касающихся безопасности. Кроме того, особые условия окружающей среды, такие как высокая или низкая температура и повышенная влажность, также могут создавать тяжелые условия проведения испытаний и приводить к выходу из строя комплектующих изделий робота или его неожиданному поведению.
7.2 До начала эксплуатации робота или взаимодействия с ним необходимо ознакомиться с расположением всех кнопок аварийной остановки на шасси робота и ОПУ.
7.3 Во время работы робота при незадействованной кнопке аварийной остановки не допускаются следующие ситуации.
7.3.1 Присутствие людей в зонах непосредственно перед роботом или за ним.
7.3.2 Присутствие людей в радиусе действия установленного на роботе манипулятора.
7.3.3 Прикосновения к роботу, за исключением активации кнопки аварийной остановки.
8 Порядок проведения испытаний
8.1 Область идентификации
8.1.1 Полная конфигурация робототехнического комплекса, подлежащего идентификации и документированию, включает робота, его ОПУ, рабочие органы, источники питания, ЗИП, другие комплектующие изделия и полезную нагрузку.
При документировании следует использовать установленную терминологию. Это облегчает идентификацию общих характеристик разных робототехнических комплексов и помогает поддерживать согласованную терминологию.
Примечание - Например, термины "колеса" и "гусеницы" рекомендуется использовать, где это применимо, для определения механизма перемещения.
8.1.2 Все ручные регулировки и настройки робота должны быть определены, задокументированы и оставаться неизменными на протяжении всех идентификационных испытаний. Любые последующие регулировки во время испытаний создадут новую конфигурацию испытуемого робототехнического комплекса.
Данные конкретные настройки и ручные регулировки, а также порядок их выполнения должны быть задокументированы в виде текста, фотографий, видеофайлов или их сочетаний.
8.1.3 ГОСТ Р 60.6.3.25 устанавливает методы оценки возможности развертывания роботов для работы в экстремальных условиях после транспортировки, включая определение времени подготовки робота к работе, состава инструментов, габаритных размеров и массы упаковок. Испытания, установленные в ГОСТ Р 60.6.3.25 по определению всех этих параметров, не должны повторяться в процессе идентификации конфигурации робототехнического комплекса.
8.2 Порядок идентификации и настройки конфигурации робототехнического комплекса
Примечание - Целью данного этапа испытаний являются только идентификация и документирование общего вида робототехнического комплекса. Методы испытаний конкретных комплектующих изделий существуют либо их разрабатывают при необходимости.
8.2.1 Необходимо идентифицировать и задокументировать все комплектующие изделия робота и проверить их функциональность. Соответствующие процедуры настройки и технического обслуживания должны быть определены, записаны на видео и сфотографированы, при этом необходимо измерить время их выполнения.
Примечание - Видеозаписи и фотографии помогают пользователям робота понимать и воспроизводить данные процессы.
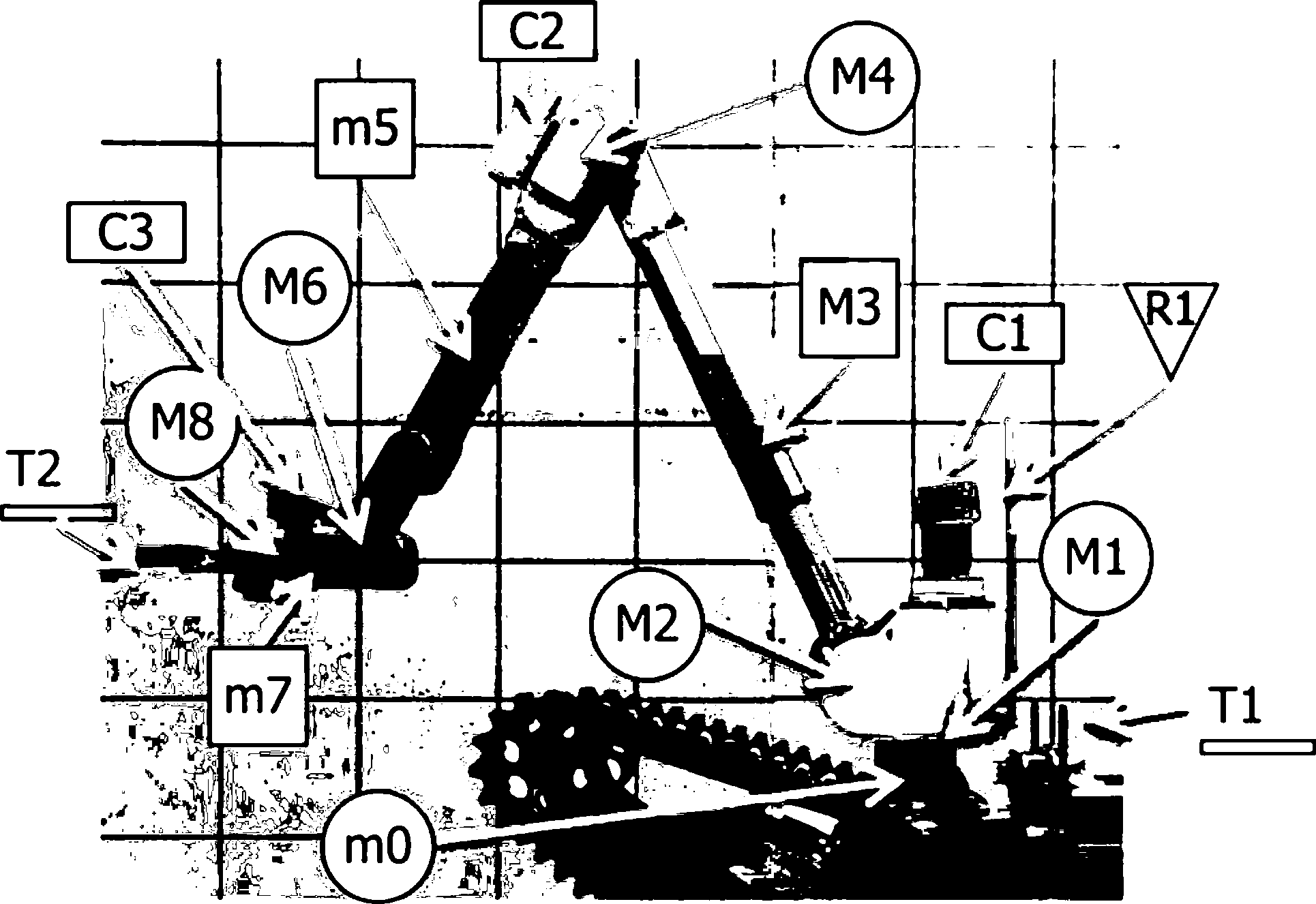
На каждом этапе данного процесса следует использовать надлежащее число таблиц и рисунков. Все иллюстрации должны быть снабжены описаниями, позволяющими определить, к каким комплектующим изделиям они относятся. Кроме того, на иллюстрациях должны быть отмечены их основные характеристики. Иллюстрации следует использовать для определения местоположения комплектующих изделий на шасси или ОПУ. Пример показан на рисунке 2.
Примечание - Схематические представления могут быть использованы для иллюстрации конкретных характеристик, например размеров.
 |
Примечание - Приведенные на данном рисунке условные обозначения показаны только с целью иллюстрации. Пользователи могут использовать собственные условные обозначения.
Рисунок 2 - Идентификация основных комплектующих изделий робота
8.2.2 Упаковка
Необходимо идентифицировать и перечислить все упаковочные ящики робототехнического комплекса.
8.2.2.1 Следует включить изображения всех идентифицированных упаковок. Пример приведен на рисунке 3.
 |
Примечание - Все элементы комплекса в том виде, в котором они были доставлены на испытательный стенд. Они расположены на стенде для фотографирования с разметкой на заднем плане (20 см). На упаковке расположено шасси испытуемого робота с дистанционным управлением для наглядности. На каждой упаковке четко указаны идентификационный номер, название, масса, тип и модель.
Рисунок 3 - Упаковочная тара
8.2.2.2 Информация о типе, модели, размерах и массе каждой идентифицированной упаковки должна быть указана в соответствующей таблице. Пример приведен в таблице 1.
Таблица 1 - Пример описания упаковочной тары
Параметр | Значение |
Тип | <xxxxxxxxx> |
Модель | <yyyyyyyy> |
Масса | __________ кг |
Длина | __________ см |
Ширина | __________ см |
Высота | __________ см |
Примечание - Число таблиц в представлении конфигурации ничем не ограничено.
8.2.3 Время развертывания
Следует измерить затраченное время с момента, когда робототехнический комплекс, находящийся в транспортной упаковке, был разгружен на землю, до момента, когда данный комплекс полностью собран и проверена работоспособность всех его комплектующих изделий.
8.2.3.1 Робототехнические комплексы могут быть поставлены с различной степенью готовности к работе, от варианта, требующего только распаковки и сборки, до полностью готового к работе комплекса. Выполнение требований ГОСТ Р 60.6.3.25 также влияет на длительность развертывания. Необходимо всегда учитывать данные различия при сравнении времени развертывания разных роботов.
8.2.3.2 Время, потребовавшееся для ручной регулировки, необходимо также включить в продолжительность времени развертывания.
8.2.3.3 При возникновении каких-либо ошибок во время данного процесса следует их исправлять, не выключая секундомер. При этом следует зарегистрировать ошибки, время их возникновения и принятые меры. Если возможно, то следует продолжить процесс развертывания до приведения робототехнического комплекса в полную готовность либо до момента, когда дальнейшее продолжение данного процесса невозможно.
8.2.3.4 Заказчик испытаний может выбрать в качестве результата усредненное время развертывания за несколько попыток или среднее время развертывания среди нескольких операторов. Данный выбор также должен быть зафиксирован. Заказчик испытаний может запросить повторное выполнение процесса идентификации конфигурации, если в ходе данного процесса произошли значительные ошибки или отклонения, не позволяющие считать общее время настройки репрезентативным.
8.2.4 Размеры и масса робототехнического комплекса
Необходимо измерить и задокументировать все линейные размеры (длину, ширину, высоту) и массу отдельно робота, ОПУ и других составных частей робототехнического комплекса, включая следующее:
- массу испытуемой конфигурации робота, его аккумуляторной батареи и ОПУ;
- основные размеры (длину, ширину и высоту) робота, ОПУ, экрана ОПУ, приемо-передающего устройства, аккумуляторной батареи, контроллера, а также область достижимости манипулятора в направлениях вперед, вбок, по вертикали и по диагонали;
- степени подвижности использованных составных частей: манипулятора, захватного устройства или другого рабочего органа, вооружения и т.д.
8.2.5 Средства обеспечения безопасности
В данном разделе должны быть приведены иллюстрации, демонстрирующие средства обеспечения безопасности комплекса и их местонахождение на шасси и ОПУ. Например, кнопки аварийной остановки, сигналы предупреждения об опасности защемления, об ограждении пропеллеров, о действиях в случае потери связи и т.д. К каждой иллюстрации должно быть приложено описание, позволяющее определить данное средство и его местонахождение на шасси или ОПУ
8.2.6 Мобильность
Все механизмы, обеспечивающие мобильность робототехнического комплекса, такие как колеса, гусеницы и флипперы, должны быть идентифицированы и верифицированы на функциональность. Пример приведен в таблице 2.
Таблица 2 - Пример описания конфигурации мобильности
Наименование | Тип (колесный, гусеничный, шагающий) | Управление приводом | Включение |
Левая гусеница | Колесный | Независимое | Фиксированное |
Правая гусеница | Колесный | Независимое | Фиксированное |
Левый передний флиппер | Гусеничный | Независимое | Инициированное |
Правый передний флиппер | Гусеничный | Независимое | Инициированное |
Левый задний флиппер | Гусеничный | Синхронизированное | Индексированное |
Правый задний флиппер | Гусеничный | Синхронизированное | Индексированное |
8.2.7 Камеры
Необходимо идентифицировать и задокументировать приведенную ниже информацию.
8.2.7.1 Идентификатор или наименование камеры, присвоенное изготовителем.
8.2.7.2 Способ обнаружения:
- электронно-оптический (EO);
- инфракрасный (IR);
- термический;
- прочий.
8.2.7.3 Тип изображения:
- цветное (Color);
- черно-белое (BW);
- инфракрасное (IR);
8.2.7.4 Угол обзора (в градусах).
8.2.7.5 Увеличение:
- отсутствует;
- оптическое;
- цифровое.
8.2.7.6 Пример приведен в таблице 3. Следует указать кратность увеличения (например, 10x), если применимо и известно.
Таблица 3 - Пример описания конфигурации камеры
Обозначение | Тип | Изображение | Угол обзора | Увеличение |
Передняя | EO | Color | 90 | Отсутствует |
Задняя | EO | BW | 90 | Отсутствует |
На локте | - | - | - | Цифровое, 10 |
На запястье | - | - | - | Отсутствует |
На рабочем органе | - | - | - | Цифровое, 4 |
Термическая | Термический | BW | 40 | Отсутствует |
8.2.8 Датчики
Необходимо идентифицировать, проверить и задокументировать все имеющиеся на борту датчики, за исключением камер, включая их характеристики. К датчикам относятся, но не ограничиваются ими, приборы, используемые для указанных ниже целей.
8.2.8.1 Определение параметров движения/навигации, например датчики угла тангажа, угла крена, расстояния и геопозиционирования.
8.2.8.2 Работа с химическими, биологическими, радиоактивными, ядерными или взрывчатыми веществами (CBRNE) или спасательные операции (могут использоваться датчики температуры или других типов).
8.2.9 Питание
Необходимо идентифицировать и задокументировать источник(и) питания, аккумуляторную батарею или иной источник с указанием типа(ов) и числа элементов и характеристики производительности, включая ожидаемое время работы. В комплекте должны поставляться необходимые компоненты, такие как зарядное устройство(а) и запасные элементы питания.
8.2.10 Установленная система радиосвязи
8.2.10.1 Необходимо идентифицировать и задокументировать уровень мощности, диапазон(ы) частот, тип(ы) антенн(ы) и протокол передачи сигналов управления, видео- и аудиоданных.
8.2.10.2 Пример приведен в таблице 4.
Таблица 4 - Пример описания конфигурации системы радиосвязи
Размещение | Системы | Частота, МГц | Мощность, мВт | Усиление антенны, дБ | Тип антенны (всенап- равленная/ направ- ленная) | Протокол (анало- говый/ цифро- вой) |
Робот | Управление | |||||
Видео | ||||||
Передатчик аудио | ||||||
Приемник аудио | ||||||
ОПУ | Управление | |||||
Видео | ||||||
Передатчик аудио | ||||||
Приемник аудио |
8.2.11 Установленная система кабельной связи
Необходимо идентифицировать и задокументировать уровень мощности, подаваемой на робота, общую длину кабелей, возможность передачи сигналов управления, видео- и/или аудиоданных, тип используемых проводов (оптоволоконные или медные), диаметр и массу катушки при полной загрузке, а также наличие подсветки.
8.2.12 Установленный манипулятор
Необходимо идентифицировать, измерить и задокументировать рабочее пространство установленного на роботе манипулятора в направлениях вперед, вбок, вверх и по диагонали, а также число степеней подвижности. Пример приведен в таблице 5.
Таблица 5 - Пример описания конфигурации манипулятора
Идентификатор звена/шарнира | Поступательный: длина, см | Вращательный (поворотный), градусы | Управление: А - активное Р - пассивное М - ручное | Наиме- нование | Приме- чание | ||
Min | Max | Min | Max | ||||
m0 | - | - | - | - | |||
M1 | - | - | |||||
M2 | - | - | |||||
M3 | |||||||
... | |||||||
8.2.13 Рабочие органы
Необходимо идентифицировать и задокументировать параметры используемых рабочих органов, включая их назначение, диапазоны перемещения в направлениях вперед, вбок, вверх и по диагонали, а также степени подвижности, если применимо.
8.2.14 Инструменты
Необходимо идентифицировать и задокументировать применяемые инструменты. Пример приведен в таблице 6.
Таблица 6 - Пример описания конфигурации инструментов
Примечание - Таблицу заполняют после завершения испытаний, указывая, какие инструменты из поставленного комплекта были использованы.
Наименование | Количество |
Гаечный ключ | 1 |
Клейкая лента | 1 рулон |
8.2.15 Также следует указать, если применимо, перечисленные ниже элементы.
8.2.15.1 Порты для данных, питания и т.д.
8.2.15.2 Функциональные индикаторы.
8.2.15.3 Расположение указанных компонентов.
8.2.15.4 Ручки для переноса и крепежные позиции на роботе.
8.2.16 Порядок проведения и длительность технического обслуживания
8.2.16.1 Видеоролики, демонстрирующие порядок проведения, используемые инструменты и длительность типовых операций по техническому обслуживанию:
- замена гусеницы/колеса;
- замена батареи;
- изменение расположения камеры;
- зарядка батареи;
- складывание и раскладывание всех шарнирных компонентов.
8.2.16.2 Следует перечислить все инструменты, необходимые для обслуживания, регулировки и ремонта робота в полевых условиях.
Примечание - В дополнительном приложении ДА приведен пример протокола испытаний, который может быть использован для документирования конфигурации.
8.3 Фото- и видеофиксация
8.3.1 Число фотографий и видеозаписей должно быть достаточным для документирования всего процесса испытаний по идентификации конфигурации данного робототехнического комплекса.
Ключевые этапы настройки и технического обслуживания должны быть показаны на фотографиях, сделанных крупным планом. Например, правильные способы очистки линзы бортовой камеры или процесс управления конкретной функцией робота. Для фотографирования всего испытуемого робототехнического комплекса следует использовать широкоугольную камеру. Примерами сюжетов для фотографирования являются: робототехнический комплекс в транспортной упаковке, робот с полностью вытянутым манипулятором и т.д.
8.3.2 Чтобы исключить влияние изменения экспозиции и баланса белого, следует определить и зафиксировать текущие ручные настройки фотоаппарата. Если надо сфотографировать несколько робототехнических комплексов в рамках одного испытания, рекомендуется использовать одни и те же настройки фотоаппарата с целью обеспечения их корректного сравнения между собой.
8.3.3 Робот, ОПУ, все входящие в комплект инструменты и оборудование, а также упаковочная тара должны быть сфотографированы по отдельности и вместе.
8.3.4 Запасные части, обычно используемые при развертывании робота, также рекомендуется сфотографировать и задокументировать.
8.3.5 При фотографировании общего вида робота все комплектующие изделия должны быть установлены и приведены в состояние готовности и/или в стандартную позицию. Например, если робот оборудован манипулятором, который должен находиться в сложенном положении во время передвижения робота, то робот должен быть сфотографирован именно в таком виде, если только заказчик испытаний не потребует сфотографировать робот с другим расположением манипулятора.
8.3.6 Объект фотографирования (робот или его принадлежности) следует разместить в углу размеченного испытательного стенда и выровнять его относительно боковых стен. Если объектом фотографирования является робот, то он должен быть размещен так, чтобы его передняя сторона, определяемая как сторона, направленная по движению робота прямым ходом, была обращена от стены. Если объектом фотографирования является ОПУ, то его сторона, используемая оператором для управления роботом, должна быть обращена вверх или от стены.
8.3.7 Объект необходимо сфотографировать со следующих позиций:
8.3.7.1 Спереди, приблизительно на высоте центра масс объекта.
8.3.7.2 Под углом 45° между двумя стенами и под углом 45° сверху вниз.
8.3.7.3 Сбоку, приблизительно на высоте центра масс объекта.
8.3.7.4 Примеры фотографий показаны на рисунке 4.
 |
Рисунок 4 - Три стандартные фотографии робота
8.3.8 Затем объект фотографирования следует разместить посередине размеченного пола испытательного стенда и сфотографировать две оставшиеся стороны с тех же позиций, указанных в 8.3.7. Объекты, которые могут быть перевернуты при эксплуатации, должны быть сфотографированы с обеих сторон, направленных вверх.
8.3.9 Отдельные комплектующие изделия и рабочие органы, установленные на роботе, следует сфотографировать общим планом, чтобы показать их местоположение на роботе, и крупным планом, чтобы показать их детали (см. рисунок 5). Следует сделать столько фотографий, сколько потребуется для полного представления данного объекта.
 |
Рисунок 5 - Пример робота с поворотным шарниром в основании, демонстрирующий возможность захватывания объекта
8.3.10 Необходимо сфотографировать характерные пространственные расположения имеющихся шарнирных механизмов, например манипулятора или ОПУ, в сложенном и максимально вытянутом расположении, а также в других типичных рабочих расположениях. Кроме того, следует сфотографировать расположения, демонстрирующие все степени подвижности (см. рисунок 5). Заказчик испытаний имеет право задать дополнительные функционально значимые пространственные расположения.
8.3.12 ОПУ необходимо сфотографировать в упакованном для транспортировки положении, а также в положениях, демонстрирующих его использование для управления роботом, включая, но не ограничиваясь ими, следующие положения, если применимо: развернут для работы, удерживаемый в руках, в переносном положении, размещенный на столе. На фотографиях не должно быть четко видимого изображения оператора.
8.3.13 Все фотографии необходимо проверить на предмет их масштаба, качества, полноты и согласованности до завершения этапа фотографирования.
8.4 После развертывания
Рекомендуется определить, замерить длительность и задокументировать процессы технического обслуживания и повторной упаковки робототехнического комплекса, используя, если применимо, последовательность действий, представленную в 8.1-8.3, а также указать требования или руководства изготовителя робота и эксплуатирующей организации.
9 Требования к отчетности
9.1 Использование таблиц и рисунков для документирования результатов данных испытаний определено в 8.2. Виды таблиц и рисунков не стандартизованы. Тем не менее все информационные поля таблиц должны содержать информацию, полностью представляющую полученные результаты.
9.2 В протоколе испытаний необходимо представить следующую информацию (кроме случаев, когда указано, что она предоставляется "факультативно"):
9.2.1 "Наименование комплекса испытаний и задания" - данное испытание входит в состав комплекса "Логистика", а наименованием задания является "Конфигурация робота".
9.2.2 "Обозначение стандарта" - обозначение настоящего стандарта.
9.2.3 "Дата" - дата проведения испытаний.
9.2.4 "Место" - наименование организации или полигона, где проводят испытания.
9.2.5 "Адрес" - наименование населенного пункта, района или области, где проводят испытания.
9.2.6 "Мероприятие/заказчик" - если испытания робота проводят независимо от какого-либо конкретного мероприятия или заказчика, то в данном поле указывают "Независимое".
Примечание - Например, "Испытание N 7 по оценке робота для работы в экстремальных условиях". В данном наименовании могут быть отражены характеристики мероприятия; например, оно имеет отношение к организации закупок, обучению, проверке метода испытаний, организации взаимодействия между пользователями и разработчиками, метрологическим исследованиям и т.д.
9.2.7 "Изготовитель робота" - наименование изготовителя робота.
9.2.8 "Модель робота" - основное обозначение данного робота.
9.2.9 "Конфигурация робота" - при наличии предоставляет изготовитель/разработчик робота в качестве идентификатора следующего, более низкого уровня; часто используют для обозначения основного рабочего органа, возможностей бортовых систем или области использования по назначению, а также в качестве номера версии робота.
9.2.10 "Оператор/организация" - фамилия и инициалы человека, который будет осуществлять управление роботом при проведении испытаний, наименование организации, к которой относится оператор, и контактная информация.
Примечание - Если важно соблюсти анонимность при заполнении какого-либо поля, то вместо наименования или фамилии может быть использован уникальный кодовый идентификатор.
9.2.11 "Настройки оборудования" - идентифицированные и проверенные настройки в соответствии с разделом 8.
9.2.12 "Условия окружающей среды" - условия проведения испытаний, включая уровень освещенности, температуру и влажность, а также другие применимые условия.
9.2.13 "Связь с роботом" - указывают, использует ли оператор для связи с роботом радиоканал, кабель или их комбинацию.
9.2.14 "Номер мероприятия" - используется для обозначения порядкового номера мероприятия по проведению испытаний, состоящего из статистически значимого числа попыток.
Примечание - Мероприятие по проведению испытаний предполагает выполнение необходимого числа успешных попыток для обеспечения статистически значимого результата либо объявления данного мероприятия неудачным. При каждом последующем испытании той же конфигурации робота номер мероприятия увеличивают на единицу.
9.2.15 "Руководитель испытаний/организация" - фамилия и инициалы руководителя испытаний и наименование организации, которую он представляет.
9.2.16 "Видеорезультаты" (если применимо) - наименования видеофайлов с фиксацией хода испытаний. Для одной и той же конфигурации робота необходимо использовать правила соглашения о единых наименованиях для всех видеофайлов в рамках установленных методов испытаний.
Приложение ДА
(рекомендуемое)
Форма протокола испытаний
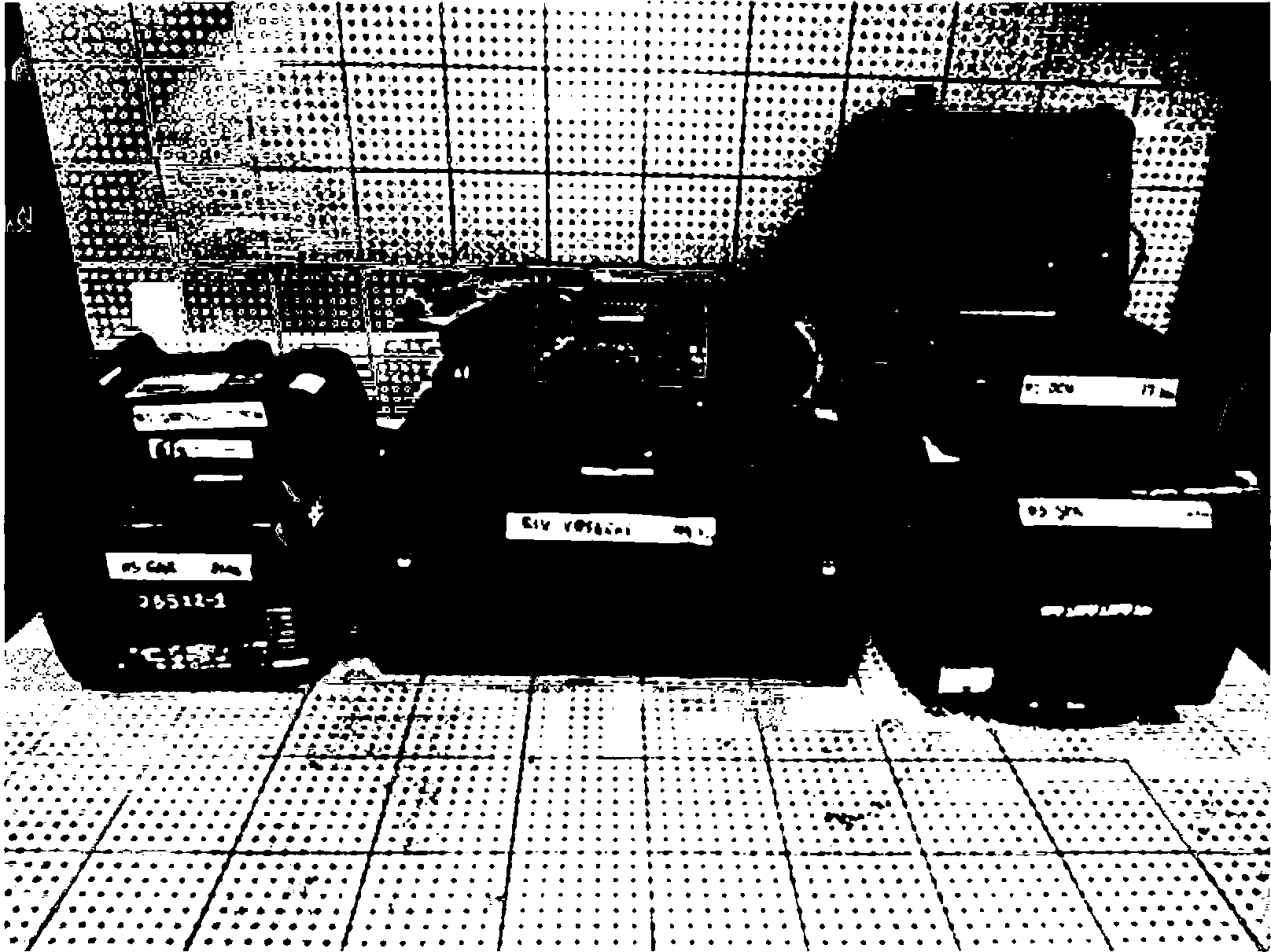 |
Рисунок ДА.1 - Форма протокола испытаний
 |
Рисунок ДА.1, лист 2
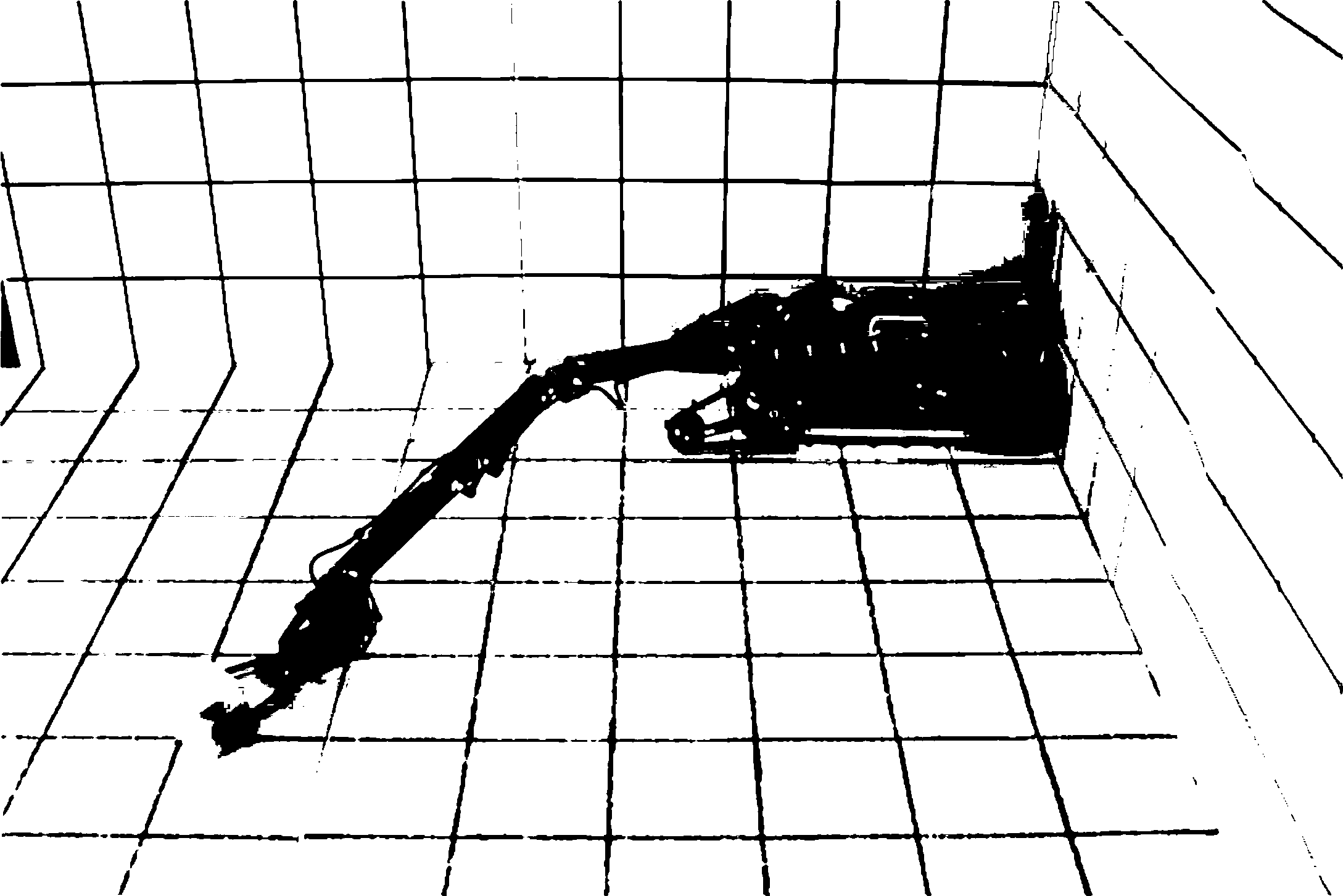 |
Рисунок ДА.1, лист 3
Приложение ДБ
(справочное)
Сведения о соответствии ссылочных национальных стандартов стандартам, использованным в качестве ссылочных в примененном стандарте
Таблица ДБ.1
Обозначение ссылочного национального стандарта | Степень соответствия | Обозначение и наименование ссылочного стандарта |
ГОСТ Р 60.6.3.25 | MOD | ASTM E2592-16 "Стандартная практика оценки возможностей роботов для работы в экстремальных условиях. Логистика. Упаковка запаса оборудования городских поисково-спасательных подразделений" |
Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандарта: - MOD - модифицированный стандарт. | ||
УДК 621.865.8:007.52:006.86:006.354 | ОКС 13.200 25.040.30 |
Ключевые слова: роботы, робототехнические устройства, роботы для работы в экстремальных условиях, методы испытаний, конфигурация, робототехнические комплексы, порядок проведения испытаний, испытательное оборудование | |
{kind=link}