ГОСТ Р 60.6.3.16-2020
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
МЕТОДЫ ИСПЫТАНИЙ СЕРВИСНЫХ МОБИЛЬНЫХ РОБОТОВ ДЛЯ РАБОТЫ В ЭКСТРЕМАЛЬНЫХ УСЛОВИЯХ
Датчики. Острота технического зрения
Robots and robotic devices. Test methods for service mobile emergency response robots. Sensors. Technical vision acuity
ОКС 13.200
25.040.30
Дата введения 2021-03-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным автономным научным учреждением "Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики" (ЦНИИ РТК) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 "Робототехника"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 декабря 2020 г. N 1296-ст
4 Настоящий стандарт является модифицированным по отношению к стандарту АСТМ Е2566-17а* "Стандартный метод испытаний для оценки средств очувствления роботов для работы в экстремальных условиях. Острота зрения" (ASTM Е2566-17а "Standard test method for evaluating emergency response robot sensing: Visual acuity", MOD) путем внесения технических отклонений, объяснение которых приведено во введении к настоящему стандарту.
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Наименование настоящего стандарта изменено относительно наименования указанного стандарта для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5) и для увязки с наименованиями, принятыми в существующем комплексе национальных стандартов Российской Федерации.
Сведения о соответствии ссылочных национальных стандартов стандартам, использованным в качестве ссылочных в примененном стандарте, приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Стандарты комплекса ГОСТ Р 60 распространяются на роботов и робототехнические устройства. Целью стандартов является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов, узлов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: "Общие положения, основные понятия, термины и определения", "Технические и эксплуатационные характеристики", "Безопасность", "Виды и методы испытаний", "Механические интерфейсы", "Электрические интерфейсы", "Коммуникационные интерфейсы", "Методы программирования", "Методы построения траектории движения (навигация)", "Конструктивные элементы". Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации: промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам и сервисным мобильным роботам.
Настоящий стандарт относится к тематической группе "Виды и методы испытаний" и распространяется на сервисных мобильных роботов, предназначенных для работы в экстремальных условиях. Настоящий стандарт определяет метод испытаний остроты технического зрения бортовых камер роботов.
Настоящий стандарт является модифицированным по отношению к стандарту АСТМ Е2566-17а, разработанному техническим комитетом Е54 ASTM International "Прикладные системы для национальной безопасности" в соответствии с принципами стандартизации, установленными в Решении о принципах разработки международных стандартов, руководств и рекомендаций Комитета по техническим барьерам в торговле Всемирной торговой организации, для приведения его в соответствие с требованиями основополагающих национальных и межгосударственных стандартов.
В настоящий стандарт внесены следующие технические отклонения по отношению к стандарту АСТМ Е2566-17а:
- не включены примечания и сноски примененного стандарта, которые нецелесообразно применять в российской национальной стандартизации в связи с их содержанием, имеющим справочный характер и относящимся к системе стандартизации США;
- значения физических величин указаны исключительно в Международной системе единиц (СИ), используемой в национальной стандартизации в соответствии с требованиями ГОСТ 8.417-2002, в то время как в примененном стандарте значения измерений указаны как в системе единиц СИ, так и в американских единицах (дюйм-фунт), в связи с чем пункт 1.7 примененного стандарта об использовании двух систем единиц измерения не включен в настоящий стандарт;
- раздел 1 "Область применения" приведен в соответствие с требованиями ГОСТ 1.5-2001: пункт 1.4 перенесен в раздел 4, пункт 4.1; пункты 1.2 и 1.3 примененного стандарта перенесены в раздел 4, где имеют нумерацию 4.2 и 4.3, соответственно пункт 4.1 примененного стандарта в настоящем стандарте имеет нумерацию 4.4; пункт 1.5 примененного стандарта перенесен в раздел 10, пункт 10.3; пункт 1.6 примененного стандарта перенесен в раздел 5, пункт 5.11; пункт 1.9 примененного стандарта перенесен во введение; нумерация пункта 1.8 примененного стандарта изменена на 1.2;
- в раздел 2 "Нормативные ссылки" не включены стандарт АСТМ Е2592, ИСО 12233 и ИСО 8596:2009, не имеющие аналогов среди межгосударственных и национальных стандартов; соответственно из текста стандарта исключены ссылки на эти документы, имеющие справочный характер, что не влияет на техническое содержание соответствующих пунктов; в раздел 2 добавлена ссылка на ГОСТ Р 60.0.0.4;
- в соответствии с ГОСТ Р 1.7-2014, ГОСТ 1.3-2014, ГОСТ Р 1.5-2012 и ГОСТ 1.5-2001 включен раздел 3 "Термины и определения" вместо использованного в примененном стандарте раздела 3 "Терминология", состоящего из вводного абзаца под номером 3.1 и подраздела 3.2 "Определения";
- терминологические статьи расположены в алфавитном порядке русского языка для обеспечения соответствия требованиям ГОСТ 1.5-2001;
- для обеспечения более четкого структурирования основных положений стандарта и обеспечения соответствия требованиям ГОСТ 1.5-2001 пункт 4.2 примененного стандарта перенесен в раздел 6, пункт 6.1, соответственно пункты 6.1-6.6 примененного стандарта имеют в настоящем стандарте нумерацию 6.2-6.7; пункт 4.3 примененного стандарта перенесен в раздел 5, пункт 5.4, соответственно пункты 5.4-5.9 примененного стандарта имеют в настоящем стандарте нумерацию 5.5-5.10; пункт 8.7 примененного стандарта исключен, так как он практически повторяет пункт 8.6, соответственно изменена нумерация последующих пунктов раздела 8; пункт 11.4 "Воспроизводимость" примененного стандарта также исключен, т.к. в нем только сказано, что исследования по данному вопросу еще продолжаются, и не определено никаких требований;
- не включены рисунки 1-5 и 8 из примененного стандарта, содержащие фотографии конкретных испытательных стендов лабораторий США, соответственно изменена нумерация рисунков 6-7 на 1-2 и 9 на 3;
- обозначения приложений Х.1 и Х.2 примененного стандарта изменены на А и В в соответствии с требованиями ГОСТ 1.5-2001; соответственно изменены обозначения пунктов, таблицы и рисунка;
- в приложении А оставлены только комментарии к определениям терминов, установленных в настоящем стандарте, без повторения самих определений, приведенных в разделе 3; пункты, в которых повторены определения из раздела 3 без каких-либо комментариев, исключены;
- на рисунке В.1 не приведены наименование и символы национальных институтов США, и он приведен в соответствие с текстом стандарта;
- ключевые слова приведены в библиографических данных в соответствии с ГОСТ 1.5-2001 вместо раздела 13 "Ключевые слова" в примененном стандарте.
1 Область применения
1.1 Настоящий стандарт распространяется на телеуправляемых наземных роботов, соответствующих определению по ГОСТ Р 60.6.3.1, с массогабаритными параметрами, сопоставимыми с параметрами человека, и устанавливает метод испытаний, испытательное оборудование, порядок проведения испытаний и показатели для количественной оценки остроты технического зрения бортовых камер роботов.
1.2 Требования настоящего стандарта не распространяются на весь спектр проблем безопасности, связанных с его применением, при их наличии. Пользователи настоящего стандарта отвечают за разработку необходимых мер безопасности и охраны здоровья, а также за определение применимости законодательных ограничений до использования настоящего стандарта.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р 60.0.0.4/ИСО 8373:2012 Роботы и робототехнические устройства. Термины и определения
ГОСТ Р 60.6.3.1 Роботы и робототехнические устройства. Методы испытаний сервисных мобильных роботов для работы в экстремальных условиях. Термины и определения
ГОСТ Р ИСО/МЭК 18004 Информационные технологии. Технологии автоматической идентификации и сбора данных. Спецификация символики штрихового кода QR Code
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочного стандарта в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ Р 60.0.0.4, а также следующие термины с соответствующими определениями:
3.1
генератор изображения (imager): Сенсорная система или система датчиков, создающая изображение. [ГОСТ Р 60.6.3.1-2019, статья 2.2] |
3.2 динамический диапазон (dynamic range): Мера способности системы камеры на одной сцене одновременно наблюдать детали на объектах в темной внешней среде и во внешней среде с определенной интенсивностью света.
3.3
зона обзора [(image) field of view]: Область, видимая на наблюдаемом изображении, измеряемая в угловых величинах в горизонтальном и вертикальном направлениях. [ГОСТ Р 60.6.3.1-2019, статья 2.6] |
3.4
изображение (image): Двумерная матрица значений, у которой каждое из двух измерений представляет угловое отклонение (возможно нелинейное) в ортогональных направлениях от оптической оси датчика. [ГОСТ Р 60.6.3.1-2019, статья 2.7] |
3.5
кольцо Ландольта (Landolt С): Оптотип, состоящий из черного круглого кольца с разрывом на белом фоне, все размеры которого заданы. [ГОСТ Р 60.6.3.1-2019, статья 2.10] |
3.6
различение (resolve): Акт визуального распознавания наличия маркировки или объекта. [ГОСТ Р 60.6.3.1-2019, статья 2.29] |
3.7
разрешение изображения (image resolution): Величина, характеризующая качество изображения, формируемого системой технического зрения робота, и измеряемая в количестве пикселей на единицу площади изображения или в виде высоты и ширины изображения, выраженных в пикселях. [ГОСТ Р 60.6.3.1-2019, статья 2.30] |
3.8
резкость (изображения) [(image) acuity]: Свойство изображения, определяющее контрастность и размытость границ объектов. [ГОСТ Р 60.6.3.1-2019, статья 2.31] |
3.9 система камеры (camera system): Совокупность технических средств, включая саму камеру, осветители, средства сжатия изображения, интерфейс с рабочим место оператора, монитор и органы регулировки, которые могут быть использованы для формирования изображения с достаточным разрешением, резкостью и динамическим диапазоном на операторском пульте управления при различных условиях внешней среды.
3.10
система центрального зрения (центральное зрение) [foveated vision system (foveated vision)]: Система технического зрения, имеющая более высокое разрешение (обеспечивающая больше информации) в центре изображения, чем по краям. [ГОСТ Р 60.6.3.1-2019, статья 2.35] |
3.11
фокусное расстояние (focal length): Эквивалентное расстояние в атмосферном воздухе между фокальной точкой камеры и точкой, в которой лучи света, входящие в оптическую систему, впервые коллимируются. [ГОСТ Р 60.6.3.1-2019, статья 2.41] |
3.12
формат изображения (aspect ratio): Отношение ширины к высоте изображения, создаваемого системой технического зрения робота. [ГОСТ Р 60.6.3.1-2019, статья 2.42] |
3.13 частота кадров (framerate): Мера разрешения по времени системы камеры, соответствующая числу кадров в секунду, отображаемых на дисплее удаленной системы.
3.14
штриховой клин (resolution wedge): Ряд копланарных линий, которые по согласованной схеме демонстрируют уменьшение интервала между линиями и толщины отдельных линий. [ГОСТ Р 60.6.3.1-2019, статья 2.45] |
3.15 QR-код (быстро считываемый код) [QR Code (quick response code)]: Узор из черных квадратов, который кодирует цифровую информацию и предназначен для сканирования специальным устройством с последующей передачей считанной информации на компьютер для обработки.
4 Показатели и задание для испытаний
4.1 Данный метод испытаний является частью испытательного комплекта по оценке средств очувствления мобильных роботов для работы в экстремальных условиях. Тем не менее настоящий стандарт является самостоятельным и полным. Данный метод испытаний применим к наземным мобильным роботам, управляемым дистанционно с расстояния, соответствующего целевому назначению робота. При проведении испытаний оператор со своего удаленно расположенного рабочего места контролирует и управляет всеми основными и вспомогательными функциями мобильного робота, которые должны обеспечивать эффективность и результативность выполнения поставленной задачи.
4.2 Основным показателем для данного метода испытаний является наличие у мобильного робота способности воспринимать плоские изображения и передавать их оператору или в подсистему распознавания образов с заданным уровнем статистической достоверности. Дополнительными показателями являются зона обзора камеры и формат передаваемого изображения.
4.3 Данный метод испытаний может также быть использован для оценки квалификации оператора при выполнении конкретного задания. При этом показателем может быть число успешных попыток выполнения задания в минуту, рассчитанное в интервале от 10 до 30 мин.
4.4 Заданием для данного метода испытаний является считывание мобильным роботом стандартных символов дискретно уменьшающихся размеров с заданных расстояний для измерения остроты зрения каждой бортовой камеры в дальней и ближней зонах по изображению, отображаемому на удаленном рабочем месте оператора. Значением показателя является размер в миллиметрах наименьшего объекта, который может быть считан камерой и идентифицирован оператором в дальней и ближней зоне. Для каждой камеры также определяют формат изображения и зону обзора.
5 Требования к проведению испытаний
5.1 При дистанционном управлении сервисными мобильными роботами в неструктурированных и часто опасных средах необходимы различные уровни остроты технического зрения. Техническое зрение мобильных роботов, как правило, используется для информирования оператора о ситуации вокруг робота, нахождения доступных маршрутов движения, преодоления или обхода препятствий, идентификации интересующих объектов и проведения тщательного осмотра. Данный метод испытаний позволяет количественно оценить остроту технического зрения мобильного робототехнического комплекса в дальней и ближней зонах, которое необходимо при выполнении практически любых работ. Данные количественные характеристики обеспечивают общее представление, позволяющее пользователям сервисных мобильных роботов лучше понять и выразить свои требования, а также конкретизировать возможности визуального очувствления.
5.2 В состав дистанционно управляемого мобильного робототехнического комплекса могут входить несколько камер, поскольку одна камера вряд ли будет эффективной при всех вариантах его использования по назначению. Например, камеры с объективами с переменным фокусным расстоянием часто используют для выполнения заданий в дальней зоне. Камеры с короткофокусными объективами часто используют для выполнения заданий в ближней зоне. Широкоугольные объективы часто используют для управления движением и обхода препятствий. Данный метод испытаний позволяет оценить каждую бортовую камеру, чтобы понять общие возможности комплекса.
5.3 Данный метод испытаний позволяет однозначно определить требования к роботу через значения показателей остроты зрения и зоны обзора. Это помогает количественно оценить применимость оптических или цифровых камер с переменным фокусным расстоянием, а также объективов с фиксированной или переменной фокусировкой. Плакаты с символами для определения остроты технического зрения также могут помочь получить количественные значения характеристик в рамках других методов испытаний и сценариев обучения.
5.4 Испытания могут проводиться в освещенном и затемненном помещении или в коридоре достаточной длины и ширины для размещения робота и тестовых таблиц на заданных расстояниях. Допускается использование осветительных устройств, установленных на роботе. Для измерения уровня освещенности должен быть использован люксметр.
5.5 Данный метод позволяет оценить влияние освещенности на остроту зрения. В темных условиях роботам для эффективной работы, как правило, требуются средства для освещения окружающей среды. Объекты, расположенные в дальней зоне, требуют гораздо большей интенсивности света, чем объекты, расположенные в ближней зоне вблизи робота. Переменная интенсивность света помогает обеспечить уровень освещенности окружающей среды, позволяющий камере различать визуальные детали, чтобы препятствовать так называемому "размытию" изображения. Переменная интенсивность света особенно важна при быстром переводе фокусировки камеры от дальней зоны к ближней и обратно.
5.6 Основными особенностями роботов для работы в экстремальных условиях являются:
- дистанционное управление с безопасного расстояния,
- развертывание в реальных условиях эксплуатации,
- способность работать в сложных внешних условиях,
- достаточная защищенность от неблагоприятных условий внешней среды,
- надежность и пригодность для обслуживания в полевых условиях,
- приспособленность для длительного использования или экономическая эффективность,
- оснащенность эксплуатационными мерами безопасности.
Основным преимуществом использования роботов в аварийно-спасательных операциях является повышение безопасности и эффективности сотрудников аварийно-спасательных служб.
5.7 Данный метод испытаний позволяет соотнести ожидания пользователей с фактическими возможностями, обеспечивая понимание необходимости согласования возможностей, свойственных развертываемым роботам, при любой заданной стоимости. Например, увеличение разрешения изображения обычно приводит к улучшению зоны обзора или остроты зрения, но не обязательно к тому и другому. Увеличение обеих характеристик может оказаться невозможным для роботов с требуемой массой, сроком службы или стоимостью. Надлежащие уровни понимания могут помочь обеспечить формулировку спецификаций требований в пределах имеющихся возможностей.
5.8 Данный метод испытаний дает четкое представление основных возможностей робота с количественными значениями характеристик. При применении вместе с другими методами испытаний из данного испытательного комплекта он облегчает взаимопонимание между сообществами потребителей и производителей роботов. Таким образом, данный метод испытаний может быть использован для решения следующих задач:
5.8.1 Стимулирование технических инноваций и направление производителей на реализацию совокупности возможностей, необходимых для выполнения основных задач целевого назначения робота.
5.8.2 Измерение и сравнение основных возможностей роботов. Данный метод испытаний может установить надежность робота для выполнения поставленных задач, определения возможностей добиться успеха и содействия развитию экспериментальных систем.
5.8.3 Информирование потребителей для принятия решений, проведение приемочных испытаний и согласование целей применения со статистически значимыми данными о возможностях робота, полученными путем повторных испытаний и сравнения количественных результатов.
5.8.4 Направленное обучение оператора и определение его профессионального уровня, как периодически выполняемая тренировка, в которой задействованы приводы, датчики и интерфейсы с оператором. Данный метод испытаний может быть встроен в программы обучения для сбора и сравнения количественных оценок даже в условиях неконтролируемых параметров внешней среды. Он может помочь развивать, поддерживать, измерять и отслеживать ослабевающие со временем навыки и сравнивать с результатами других групп, регионов или со средними национальными показателями.
5.9 Хотя данный метод испытаний был разработан для роботов, предназначенных для выполнения заданий в экстремальных условиях, он также может быть использован и в других областях применения роботов. Разные сообщества пользователей могут устанавливать свои собственные пороговые значения показателей в рамках данного метода испытаний в зависимости от целевого назначения робота.
5.10 При интерпретации результатов испытаний пользователям данного метода испытаний рекомендуется учитывать свои конкретные требования к роботу. Характеристика, полученная на основании только данного метода испытаний, не должна рассматриваться как общая характеристика способности робота воспринимать окружающую среду. Один метод испытаний охватывает только определенный аспект возможностей робота. Для более полной характеристики всех возможностей робота требуются результаты более широкого набора методов испытаний.
5.11 Испытания согласно данному методу могут проводиться в любом месте, где можно воспроизвести необходимые условия внешней среды и установить испытательное оборудование.
6 Требования к оборудованию
6.1 Оборудование, необходимое для проведения измерений, представляет собой тестовые таблицы проверки остроты зрения, располагаемые от робота в дальней зоне на расстоянии 6 м и в ближней зоне на расстоянии 0,4 м. Удаленно расположенный оператор должен идентифицировать символы в виде колец Ландольта с разрывами, расположенными в любой из восьми различных ориентаций. Автономные робототехнические комплексы с возможностями обработки изображений должны идентифицировать машиночитаемые символы, известные как быстро считываемые коды или QR-коды.
6.2 Компонентами испытательного оборудования, необходимыми для данного метода испытаний, являются таблицы проверки остроты зрения, описанные ниже, и устройства для установки этих таблиц на заданных расстояниях от робота. Для освещенной окружающей среды предпочтительным является проведение испытаний при дневном свете на открытом воздухе. При проведении испытаний в закрытом помещении требуется помещение или коридор достаточной длины и ширины для размещения робота и таблиц в дальней зоне и осветительное оборудование. Для проведения испытаний в условиях темноты может быть использовано такое же помещение, если в нем нет окон или оно оборудовано специальными устройствами типа блэкаут, исключающими проникновение света извне. В обоих случаях для измерения уровня освещенности необходим люксметр.
6.3 В робототехнических комплексах, у которых изображения с камер передаются на удаленное рабочее место оператора, для измерения остроты технического зрения следует использовать символы, применяемые для измерения остроты человеческого зрения. В частности, применяют символы в виде колец Ландольта (рисунки 1 и 2). Каждый символ состоит из черного кольца, размещенного для максимального контраста на белом фоне, с внешним диаметром, равным пятикратной толщине кольца. Кольцо имеет разрыв с параллельными краями, размер которого равен толщине кольца. Данный размер является наименьшим различимым признаком при оценке остроты технического зрения и фиксируется в качестве значения показателя. Разрыв должен быть расположен в одном из восьми радиальных направлений с интервалом 45° вокруг кольца, начиная с направления вертикально вверх. Правильное определение последовательности случайно ориентированных разрывов при заданном числе допустимых ошибок обеспечивает статистически достоверные значения показателя остроты технического зрения.
|
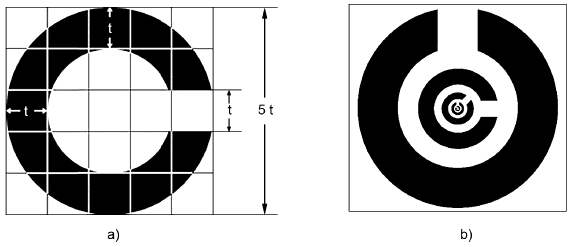
a) Относительные размеры воспринимаемого оператором символа, отображаемого на экране пульта удаленно расположенного оператора и используемого для измерения остроты технического зрения робототехнических комплексов;
b) Концентрическая последовательность все более мелких символов, которая позволяет измерять разные уровни остроты технического зрения в рамках компактного размера, что особенно полезно для использования при обучении. Но достаточно большое число концентрически расположенных символов необходимо для обеспечения степени детализации желательной для испытания остроты технического зрения. Данный рисунок может быть повернут для получения всех восьми ориентаций символа.
Рисунок 1
|

Рисунок 2 - Пример таблицы для определения остроты зрения с постепенно уменьшающимися в каждом ряду десятью произвольно ориентированными символами для получения статистически значимых оценок, основанных на заданной частоте ошибок. Размер символов в каждом ряду должен быть пропорционально адаптирован к расстоянию для дальней или ближней зоны, чтобы правильно оценить остроту зрения в процентах и коэффициент остроты зрения
6.3.1 Правильное распознавание ориентации разрыва кольца для достаточно большого числа символов с заданной частотой ошибок представляет способность определять размер разрыва. Ориентации разрывов должны быть определены относительно верха изображения с камеры в терминах направлений компаса следующим образом: 0°/север (С), 45°/северо-восток (СВ), 90°/восток (В), 135°/юго-восток (ЮВ), 180°/юг (Ю), 225°/юго-запад (ЮЗ), 270°/запад (З) и 315°/северо-запад (СЗ).
6.3.2 Хотя испытания проводят с использованием одной последовательности из 30 символов выбранного размера, в одной таблице могут быть размещены символы нескольких размеров для облегчения повторных испытаний при больших или меньших размерах символов.
6.3.3 Таблица может быть масштабирована для обеспечения проверки разных уровней остроты зрения испытуемых роботов в зависимости от предъявленных требований. На типовых таблицах используют символы размером от 0,25 до 5 мм для испытаний в ближней зоне на расстоянии 0,4 м и от 0,5 до 25 мм для испытаний в дальней зоне на расстоянии 6 м.
6.3.4 Размер символов в каждом ряду таблицы должен отличаться от размеров символов в соседних рядах не более чем на 20% в меньшую или большую сторону. Размеры символов должны изменяться от легко читаемых символов при их максимальном размере до нечитаемых символов при минимальном размере. Все символы должны быть напечатаны с достаточно высоким разрешением для обеспечения плавности контуров. Размеры символов обозначают в миллиметрах.
6.3.5 В каждом ряду должны быть идентифицированы 30 произвольно ориентированных символов, из которых по крайней мере по одному символу должны иметь разрыв с вертикальной, горизонтальной и диагональной ориентацией. Одна или несколько тестовых таблиц могут содержать совокупности символов разного размера. В альтернативном варианте, один символ каждого размера можно поворачивать и идентифицировать последовательно.
6.3.6 Для проверки остроты технического зрения в ближней зоне на расстоянии 0,4 м для печати символов следует использовать высококачественные обычные офисные принтеры или имеющиеся в продаже стандартные таблицы, чтобы даже самые маленькие символы размером 0,25 мм имели достаточное разрешение и контрастность.
6.3.7 Для проверки остроты технического зрения в дальней зоне на расстоянии 6 м могут потребоваться символы гораздо большего размера. Широкоформатные принтеры или имеющиеся в продаже стандартные таблицы следует использовать для обеспечения плавности контуров символов с достаточным разрешением и контрастностью.
6.3.8 Формула (1) может быть использована для вычисления остроты технического зрения при определенном размере символа, рассматриваемого с заданного расстояния. В таблице 1 приведено соотношение между метрическими коэффициентами (6/6) и процентным выражением остроты зрения (100%), а также примеры объектов, которые могут быть приблизительно различимы с заданных расстояний.
Острота зрения (%)=100(расстояние до таблицы)
tg(1/60°)/
размер разрыва кольца Ландольта) (1)
Таблица 1 - Пример уровней остроты зрения с относительными процентами среднего человеческого зрения на разных расстояниях
Коэффициент остроты зрения | Острота зрения, % | Фиксированное расстояние: способность различать чередующиеся черные и белые полосы со следующими промежутками при рассмотрении с расстояния | Пример объекта: расстояние должно быть не больше следующего для надежного распознавания | ||
6 м | 0,4 м | Типовой номерной знак автомобиля | Обычный газетный текст или этикетка с обратным адресом | ||
6/150 | 4% | 45 мм | 3 мм | 2,67 м | 0,06 м |
6/120 | 5% | 36 мм | 2,4 мм | 3,33 м | 0,075 м |
6/90 | 7% | 26 мм | 1,7 мм | 4,67 м | 0,105 м |
6/70 | 9% | 20 мм | 1,3 мм | 6 м | 0,135 м |
6/60 | 10% | 18 мм | 1,2 мм | 6,67 м | 0,15 м |
6/50 | 12% | 15 мм | 1 мм | 8 м | 0,18 м |
6/40 | 15% | 12 мм | 0,8 мм | 10 м | 0,225 м |
6/30 | 20% | 8,7 мм | 0,58 мм | 13,3 м | 0,3 м |
6/24 | 25% | 7 мм | 0,47 мм | 16,7 м | 0,375 м |
6/19 | 32% | 5,5 мм | 0,37 мм | 21,3 м | 0,48 м |
6/15 | 40% | 4,4 мм | 0,29 мм | 26,7 м | 0,6 м |
6/12 | 50% | 3,5 мм | 0,23 мм | 33,3 м | 0,75 м |
6/9,5 | 63% | 2,8 мм | 0,19 мм | 42 м | 0,945 м |
6/7,5 | 80% | 2,2 мм | 0,15 мм | 53,3 м | 1,2 м |
6/6,0 | 100% | 1,8 мм | 0,12 мм | 66,7 м | 1,5 м |
6/4,8 | 125% | 1,4 мм | 0,09 мм | 83,3 м | 1,88 м |
6/3,8 | 158% | 1,1 мм | 0,07 мм | 105 м | 2,37 м |
6/3,0 | 200% | 0,87 мм | 0,06 мм | 133 м | 3 м |
6/2,4 | 250% | 0,7 мм | 0,05 мм | 167 м | 3,75 м |
6/1,9 | 316% | 0,55 мм | 0,04 мм | 211 м | 4,74 м |
6/1,5 | 400% | 0,44 мм | 0,03 мм | 267 м | 6 м |
6.3.9 Для робототехнических комплексов с встроенными возможностями обработки изображений для измерения остроты технического зрения следует использовать тестовые таблицы с машиночитаемыми символами, в качестве которых могут быть применены так называемые быстро считываемые или QR-коды, представляющие собой двумерные штрих-коды, определенные в ГОСТ Р ИСО/МЭК 18004 (см. рисунок 3). Каждый QR-код состоит из сетки черных и белых квадратов, образующих определенную конфигурацию с закодированной информацией. Способность успешно считывать QR код требует разрешения, соответствующего размеру отдельных квадратов в сетке. Размер отдельных черных и белых квадратов является показателем остроты технического зрения.
|

Рисунок 3 - Пример QR-кода, использующего квадратную сетку 21x21. Данный символ кодирует строку текста, которая должна читаться как "TestCode1". Способность прочитать данный код соответствует способности различать детали изображения, равные по размеру отдельным квадратам, составляющим данный код (или 1/21 размера всего поля кода). QR-коды требуют больше места для кодирования одинаковых по размеру различаемых деталей изображения. В данном случае в 21 раз больше различаемой детали, в то время как кольцо Ландольта по размеру только в пять раз больше различаемой детали. Альтернативным вариантом может быть применение колец Ландольта и QR-кодов на одном тестовом плакате для оценки технического зрения. Способность различать QR-код заданного размера эквивалентна считыванию смежного множества колец Ландольта
6.3.10 Сетки могут иметь размеры 11х11, 21x21 и до 57x57 или даже больше, чтобы кодировать больше информации и содержать встроенный контроль ошибок. Для проверки остроты зрения достаточно сеток размером 11х11, поскольку они позволяют кодировать информацию, достаточную для измерения остроты зрения и некоторых дополнительных идентифицирующих слов, например, название или номер плаката. В каждом ряду должны быть идентифицированы 30 произвольно ориентированных символов, имеющих по меньшей мере одну вертикальную и одну диагональную ориентацию разрыва. Один или несколько тестовых плакатов могут содержать множество символов разных размеров. Альтернативным вариантом может быть расположение множества символов на плакатах, прикрепленных верхними краями к горизонтальной рейке, которые должны идентифицироваться последовательно.
6.3.11 Вспомогательные устройства обработки изображений, такие как сканеры QR-кодов, доступные на многих мобильных телефонах, могут использоваться для идентификации символов, отображаемых на интерфейсе удаленного оператора. Это может обеспечить единообразное определение остроты технического зрения без влияния потенциальных ошибок из-за особенностей зрения конкретного оператора, использующего или нет корректирующие линзы.
6.4 Для измерения зоны обзора каждой камеры используют линейку или другой предмет известного размера длиной примерно 90-120 см.
6.5 Кроме того, к испытательному оборудованию относятся:
6.5.1 Измерительная лента для определения расстояния между роботом и плакатами.
6.5.2 Приспособления для демонстрации плакатов на фиксированных расстояниях от робота, в том числе приспособления для вывешивания плакатов на стене, штативы или другие подобные устройства.
6.5.3 Средства для маркировки линии на заданном расстоянии от плакатов (0,4 м или 6 м). В помещении для этого может быть использована цветная клейкая лента.
6.5.4 Люксметр с диапазоном измерения от 0,01 до 1000 лк ±5%.
6.5.5 Для проведения испытаний в условиях освещенности требуется открытая площадка, освещенная отраженным солнечным светом, или помещение достаточных размеров для размещения робота и плакатов на дальнем расстоянии 6 м и на ближнем расстоянии 0,4 м. В любом случае внешняя среда должна иметь равномерное освещение от 150 до 300 лк или больше с использованием ровного спектра и немерцающего источника света, например, лампы накаливания или студийной светодиодной панели.
6.6 Для проведения испытаний в условиях темноты требуется помещение без окон или коридор с освещенностью не более 0,1 лк. Помещение должно иметь достаточные размеры для размещения робота и плакатов на дальнем расстоянии 6 м и на ближнем расстоянии 0,4 м. При испытании камер, чувствительных к свету в ближнем инфракрасном диапазоне (например, камер ночного видения), необходимо обеспечить, чтобы в помещении не было дополнительных источников инфракрасного излучения. К таким источникам, например, относятся камеры видеонаблюдения с инфракрасной подсветкой.
6.7 Заказчик испытаний имеет право задать другие размеры и расстояния для испытательного оборудования, а также условия испытаний в соответствии с конкретными техническими требованиями.
7 Требования безопасности
7.1 Помимо положения, приведенного в 1.2, которое относится к безопасности человека и охране здоровья, пользователи настоящего стандарта должны также учитывать вопросы сохранности оборудования и проблемы, связанные с присутствием человека и робота в общей зоне проведения испытаний. Если существуют какие-либо опасения, то должны использоваться средства обеспечения безопасности, например, страховочные средства или защитные стенки. Неблагоприятные условия внешней среды, например, высокие или низкие температуры, чрезмерная влажность и неровный рельеф могут оказаться тяжелыми, превышать рабочие диапазоны, для правильной работы в которых создан робот, или повреждать компоненты робота. Эти условия могут также вызвать неуправляемые движения робота, которые, в свою очередь, могут оказаться опасными для расположенных поблизости людей или самого робота.
7.2 Следует четко обозначить все средства аварийной остановки в конструкции мобильного робота и операторском пульте управления перед началом работы или взаимодействия с роботом.
7.3 Пока робот активен и кнопка аварийной остановки не нажата, следует избегать:
7.3.1 нахождения в зоне непосредственно перед роботом и за ним,
7.3.2 нахождения в радиусе досягаемости манипулятора робота, если он установлен,
7.3.3 касания робота, за исключением нажатия кнопки аварийной остановки.
8 Порядок проведения испытаний
8.1 Прежде всего, необходимо убедиться, что испытательное оборудование и условия внешней среды настроены надлежащим образом в соответствии с разделом 6.
8.2 Далее, необходимо убедиться, что конфигурация робототехнического комплекса определена и задокументирована.
8.2.1 Конкретная конфигурация робототехнического комплекса, подлежащего испытанию, должна быть идентифицирована и иметь уникальное имя с использованием марки, модели и присвоенного имени конфигурации, если это предусмотрено изготовителем. Процесс идентификации включает измерение и документирование размеров и масс всех подсистем, компонентов и поставляемой упаковки. Это относится к роботу, операторскому пульту управления и другим элементам обеспечения функционирования и технического обслуживания, например, к источникам питания и комплекту ЗИП. Кроме того, должны быть перечислены подсистемы, полезные нагрузки и элементы в комплекте ЗИП для обслуживания в полевых условиях, к которым относятся запасные части, инструменты, приспособления и расходные материалы, например, клейкая лента, кабельные стяжки и другие элементы. Документация должна содержать подробные фотографии всего вышеперечисленного, а также видеозаписи регламентных работ (например, замены аккумуляторной батареи). Конфигурация робототехнического комплекса должна оставаться неизменной на всех испытаниях, чтобы можно было проводить прямое сравнение характеристик и выявлять возможный взаимообмен между разными конфигурациями. Любое число идентифицированных конфигураций робототехнического комплекса может быть подвергнуто испытаниям.
8.3 Необходимо определить число необходимых попыток при измерении способностей робототехнического комплекса.
8.3.1 Число попыток при проведении испытаний должно обеспечить достаточно успешных попыток, чтобы продемонстрировать надежность робототехнического комплекса или оператора, необходимую для намеченного целевого использования. Чем выше отношение успешных попыток к сбоям, тем надежнее робототехнический комплекс или оператор. Чем больше попыток будет завершено с таким отношением, тем больше достоверности может быть в данной надежности. Расчетные уровни надежности и достоверности могут быть определены из статистических таблиц. Некоторые варианты использования могут требовать более высокой надежности. Другие могут быть более устойчивы к отказам и для них может быть достаточно более низкой надежности. Рекомендуется задавать не менее 30 испытательных попыток для определения способности робототехнического комплекса. Квалификационные испытания операторов, как правило, ограничены по времени, как указано в 8.3.4.
8.3.2 Приемлемый начальный порог может быть задан, по крайней мере, как 80% надежности при 80% достоверности. Это может быть достигнуто путем выполнения 30 попыток, из которых не менее 27 будут успешными. Если выполнение 30 попыток невозможно, то данные значения надежности и достоверности могут быть достигнуты, если из первых 20 попыток не менее 19 будут успешными, либо все 10 первых попыток будут успешными.
8.3.3 Большее число попыток позволяет получить более точные характеристики данной конфигурации испытуемого робота. При этом для определения отношения успешных попыток к сбоям из всех выполненных попыток следует учитывать 30 последних последовательных попыток.
8.3.4 Для определения квалификации оператора используют испытания, ограниченные по времени (в минутах). Подходящим интервалом срабатывания таймера может быть расчетное время для завершения не менее пяти успешных попыток. При определении и сравнении квалификации операторов важно уравнивать затраченное время для операторов категорий "эксперт" и "новичок", чтобы нормализовать усталость. Однако меньшее затраченное время в немногих успешных попытках снизит достоверность измеренной надежности оператора при выполнении задания.
8.4 Необходимо выбрать оператора для выполнения испытания.
8.4.1 Для измерения характеристик робототехнического комплекса оператор (или операторы) должен быть назначен его изготовителем с целью согласования интересов и обеспечения максимально возможной эффективности функционирования робототехнического комплекса. Наилучшие результаты, полученные с помощью назначенного изготовителем оператора, должны быть приняты за стопроцентный уровень квалификации оператора для данного робототехнического комплекса. Другой оператор может измерить свой уровень квалификации в процентах. Примерами уровней квалификации оператора могут быть "новичок" (от 0% до 39%), "профессионал" (от 40% до 79%) и "эксперт" (от 80% до 100%). Уровни квалификации операторов могут сравниваться в рамках региона или со средними показателями по стране.
8.4.2 Тренировка перед испытаниями не является обязательной. Оператор должен знать порядок проведения испытаний, настройки оборудования и условия внешней среды для проведения испытаний.
8.4.3 Во время проведения испытаний оператор должен находиться на удаленном рабочем месте, расположенном вне визуального и звукового контакта с роботом на испытательном оборудовании, но поддерживая при этом связь с роботом.
8.4.4 Во время проведения испытаний контакт любого человека с оператором относительно состояния робота на испытательном оборудовании должен считаться ошибкой. Однако при этом не должны быть запрещены контакты, касающиеся безопасности робота или персонала.
8.5 Необходимо установить или привезти робота на стартовую позицию на испытательном оборудовании, определенную в разделе 6.
8.6 Необходимо выполнять поставленное задание до тех пор, пока не будет считано нужное число символов.
8.6.1 Оператор должен считывать каждый символ на плакате по очереди при выбранных размере и расстоянии через интерфейс оператора. Рекомендуется, чтобы каждый символ считывался в течение не более 5-10 с.
8.6.2 При подсчете результатов за успешно выполненную попытку засчитывается правильное определение ориентации разрыва кольца Ландольта или правильное считывание QR-кода.
8.7 Следует измерить зону обзора и формат изображения камеры.
8.7.1 Поместить объект известной длины (см. 6.3) перед камерой горизонтально и перпендикулярно линии между центром объекта и камерой так, чтобы его концы были видны в левой и правой частях изображения, отображаемого на рабочем месте оператора. Это может потребовать перемещения объекта или робота вместе или по отдельности.
8.7.2 Измерить расстояние между камерой и центром объекта.
8.7.3 Поместить объект вертикально и перпендикулярно линии между центром объекта и камерой так, чтобы его концы были видны в верхней и нижней частях изображения, отображаемого на рабочем месте оператора. Это может потребовать перемещения объекта или робота вместе или по отдельности.
8.7.4 Измерить расстояние между камерой и центром объекта.
8.8 Обработка исключений.
8.8.1 Неисправные состояния: Для продолжения выполнения испытательной попытки необходимо вернуть робота на исходную позицию, где допускается корректирующее техническое обслуживание, которое может быть ограничено по времени. Запрещается использовать запасные части, но применение расходных материалов, указанных в 8.2.1, может быть разрешено (например, клейкой ленты и кабельных стяжек). Если робот не может продолжить выполнение задания, то должно быть объявлено завершение испытаний. Необходимо оформить отчет о проведенном корректирующем техническом обслуживании, включая время возникновения неисправности, продолжительность ее устранения, использованные средства и инструменты. Видеозапись всех действий по проведенному корректирующему техническому обслуживанию может быть полезна впоследствии для целей верификации, использования в качестве примера или обучения.
К неисправностям, в результате которых попытка признается неудачной, относятся следующие ситуации:
1) любой контакт робота со стойками или любыми другими элементами испытательного оборудования, определенного в разделе 6;
2) любая ситуация с роботом, требующая физического вмешательства оператора или других лиц во время испытания (например, застрявший или поврежденный робот);
3) для роботов с небольшим рабочим ресурсом может быть разрешена замена аккумуляторной батареи без регистрации данной ситуации как неисправного состояния, чтобы робот мог выполнить статистически значимое число попыток.
8.8.2 Несущественные исключения: Ненормальное, кратковременное функционирование робота, которое возникает, но не оказывает отрицательного влияния на выполнение задания, должно быть отмечено как часть результатов испытания, но соответствующая попытка не должна быть объявлена неудачной. Примерами являются кратковременная перезагрузка программного обеспечения или застывший экран ОПУ, кратковременная потеря связи и т.д. Неисправности должны быть зафиксированы, если в результате подобных сбоев робот выйдет из строя.
8.8.3 Технические паузы: В любой момент времени во время испытаний или тренировки, если испытательное оборудование требует регулировки или ремонта по причинам, не являющимся следствием ошибок оператора или робота, то робот должен быть остановлен, а испытательное оборудование должно быть отремонтировано перед продолжением испытаний.
9 Подсчет результатов испытаний
9.1 Необходимо подсчитать общее число успешных и неудачных попыток.
9.1.1 Если число успешно идентифицированных символов соответствует или превышает требуемое число попыток для обеспечения статистической значимости, то это необходимо отметить в протоколе испытаний.
9.2 Необходимо вычислить зону обзора по горизонтали и по вертикали, а также формат изображения.
9.2.1 Вычисляют и записывают зону обзора по горизонтали, используя рассчитанное в 8.8.3 расстояние, с использованием следующего уравнения:
Зона обзора по горизонтали=2arctg [(длина горизонтально расположенного
объекта)/2(расстояние между объектом и роботом)] (2)
9.2.2 Вычисляют и записывают зону обзора по вертикали, используя рассчитанное в 8.8.3 расстояние, с использованием следующего уравнения:
Зона обзора по вертикали=2arctg [(длина вертикально расположенного
объекта)/2(расстояние между объектом и роботом)] (3)
9.2.3 Вычисляют и записывают формат изображения, используя приведенное ниже уравнение. Следует обратить внимание на то, что для камер с дисторсией объектива данный формат может отличаться от формата изображения камеры или комплекса, указанного изготовителем.
Формат изображения = (зона обзора по вертикали)/(зона обзора по горизонтали) (4)
10 Требования к отчетности
10.1 Следующая информация о проведении испытаний и управлении испытаниями должна быть задокументирована в протоколе испытаний (за исключением случаев, специально оговоренных в качестве "факультативных"):
10.1.1 "Испытательный комплект и наименование задания" - для данного метода испытаний в протоколе испытаний должно быть указано "Датчики" и "Острота технического зрения".
10.1.2 "Обозначение стандарта" - обозначение настоящего стандарта.
10.1.3 "Дата" - дата проведения испытаний.
10.1.4 "Место" - наименование организации или полигона, где проводят испытания.
10.1.5 "Адрес" - наименование населенного пункта, района или области, где проводят испытания.
10.1.6 "Мероприятие/заказчик" (факультативно) - наименование мероприятия по проведению испытаний и заказчика испытаний.
10.1.7 "Изготовитель робота" - наименование изготовителя робота.
10.1.8 "Модель робота" - основное обозначение робота.
10.1.9 "Конфигурация робота" - при наличии; предоставляется изготовителем робота в качестве обозначения робота более низкого уровня, чем модель робота; часто данное обозначение используется для идентификации основной полезной нагрузки, встроенных возможностей или областей применения по назначению; также данное обозначение используется для представления номера версии робота.
10.1.10 "Оператор/организация" - фамилия и инициалы человека, который будет осуществлять телеуправление роботом при проведении испытаний, наименование организации, к которой относится оператор, и контактная информация.
10.1.11 "Руководитель испытаний/организация" - фамилия и инициалы руководителя испытаний, организация, которую он представляет, и контактная информация.
Примечание - В тех случаях, когда анонимность важна в любом из этих полей, например в фамилиях, рекомендуется использовать уникальные кодированные идентификаторы.
10.1.12 "Настройки оборудования" - размеры и другие параметры.
10.1.13 "Внешняя среда" - условия проведения испытаний, включая уровень освещенности, температуру, влажность и другие условия.
10.1.14 "Связь с роботом" - указывается, использует ли оператор для связи с роботом радиоканал, кабель или их комбинацию при проведении испытаний.
10.1.15 "Номер испытания" - порядковый номер регистрируемого испытания данного робота, состоящего из статистически значимого числа попыток.
Примечание - Каждое испытание состоит из выполнения необходимого числа попыток для достижения заданного уровня статистической значимости, либо объявления испытания неудачным. При очередном испытании одной и той же конфигурации робота номер испытания увеличивают на единицу.
10.1.16 "Наименования видеофайлов" (факультативно) - наименования имеющихся видеофайлов, в которых зафиксированы результаты испытаний (если таковые имеются); соглашение о наименовании должно использоваться для всех видеофайлов при испытаниях робота одной конфигурации всеми методами испытаний.
10.2 Возможны следующие результаты испытаний, фиксируемые в протоколе испытаний и приведенные в 10.2.1-10.2.5.
10.2.1 Отказ от испытаний. Данный результат фиксируют, если оператор заявил об отказе от проведения испытаний.
10.2.2 Число успешных и неудачных попыток. Соотношение этих двух чисел можно использовать для определения надежности робота или оператора при выполнении задания.
10.2.3 Затраченное время (в минутах), равное сумме длительностей всех последовательных интервалов срабатывания таймера за все время проведения испытаний.
10.2.4 При обучении операторов следует отметить среднюю скорость выполнения успешных заданий, которую рассчитывают путем деления общего числа успешных попыток на общее время испытаний и измеряют в выполненных заданиях в минуту. Результаты, полученные с помощью данного метода испытаний, могут быть сопоставлены друг с другом, при этом каждый результат связан с соответствующим уровнем статистической значимости.
10.2.5 Сведения обо всех сбоях или отказах. Данные сведения фиксируют по мере их возникновения в соответствии с 8.9.
10.2.6 Рекомендуется отмечать следующие факторы, приведенные в 10.2.6.1-10.2.6.3.
10.2.6.1 Робот не испытывался из-за проблем с составлением графика испытаний или по любым другим причинам.
10.2.6.2 Причина или причины отказа от испытаний, неисправных состояний или технических пауз.
10.2.6.3 Наблюдения, которые могут дополнить зафиксированные результаты в положительную или отрицательную сторону, любые комментарии, которые могут помочь интерпретировать результаты испытаний, или любые имеющиеся дополнительные результаты испытаний.
Примечание - На рисунке В.1 приведен пример незаполненного протокола для данного метода испытаний.
10.3 Поскольку испытательное оборудование, определенное в разделе 6, позволяет провести испытания способностей робота только в ограниченном диапазоне, то в протоколе испытаний следует отметить, что реальные характеристики технического зрения робота могут превышать ограничения, налагаемые испытательным оборудованием. Например, характеристики робота могут быть выше, чем точность печати при изготовлении тестовых таблиц.
11 Результаты испытаний и систематическая ошибка
11.1 Результаты испытаний остроты технического зрения
11.1.1 Символы в таблицах для испытания остроты технического зрения разбиты на группы по строкам. Регистрируемым результатом является наименьшая строка, которая может быть считана. Испытания на воспроизводимость показывают, что почти все операторы будут считывать символы в одной из двух соседних строк.
11.1.2 Символы в соседних строках в таблицах с кольцами Ландольта, используемых в данном методе испытаний, должны различаться по размеру не более чем на 20%. В проведенных испытаниях стандартное отклонение измерялось для разных роботов, операторов, мест проведения испытаний и расстояний. Каждая комбинация была измерена 30 раз, и среднее стандартное отклонение было рассчитано для каждой комбинации. В результате было определено, что стандартное отклонение отличалось от среднего значения не более чем на 16%. Наихудшие случаи имели место из-за нестабильности различения мелких деталей, если таблицы не были выровнены по горизонтальной и вертикальной осям. Изменение размеров символов в соседних строках на 20%, установленное в разделе 6, выбрано с учетом данного обстоятельства.
11.1.3 Использование QR-кодов для определения остроты технического зрения является основной тенденцией, и до настоящего времени никаких претензий относительно точности измерения при их использовании не было отмечено.
11.2 Результаты измерения зоны обзора
Зона обзора является вторичным показателем, и до настоящего времени никаких замечаний относительно точности измерения данного показателя не было отмечено.
11.3 Систематическая ошибка
11.3.1 Одной из переменных, которая, как было установлено, влияет на систематическую ошибку является уровень освещенности. Значительное ухудшение остроты технического зрения наблюдалось при уровнях освещенности менее 100 лк. Уровень освещенности, установленный в данном методе испытаний, составляет более 100 лк, что соответствует типовой хорошей освещенности в помещении.
11.3.2 Качество печатных таблиц, как в части разрешения печати, так и в части точности воспроизведения размеров, может существенно повлиять на измерения. Таблицы должны быть проверены для того, чтобы убедиться, что размеры разрывов в кольцах Ландольта напечатаны с погрешностью не более 1% от заявленного размера.
11.3.3 Расстояние между роботом и таблицей является потенциальным источником систематической ошибки для данного множества измерений. Было установлено, что изменение положения робота на 0,1 м не влияет на систематическую ошибку при 20%-ной разнице размеров символов в соседних рядах таблицы, установленной в разделе 6.
12 Погрешность испытаний
12.1 Правильное использование данного метода испытаний позволит измерить остроту технического зрения с погрешностью ±10%, составляющей половину разницы в размерах символов в соседних строках таблицы.
12.2 Как указано в 11.1.2, более высокая разрешающая способность является несущественной для данного метода испытаний.
Приложение А
(справочное)
Комментарии к определениям
А.1 формат изображения (3.12): Формат изображения может быть определен в разных точках системы камеры, и в каждом случае может быть получен разный результат. Для систем камер с объективами, у которых присутствуют значительные искажения, или для видеомониторов с синтетическим покрытием, которое затеняет части изображения, полученный в результате формат изображения может значительно отличаться от теоретического формата изображения любого компонента системы камеры.
А.2 динамический диапазон (3.2): "Наблюдать" в определении данного термина означает передавать детали изображения на операторский пульт управления в режиме телеуправления роботом или способность системы камеры воспринимать окружающую среду в случае автономного робота. Система камеры с высоким уровнем динамического диапазона сможет наблюдать детали сцены как в светлых зонах, например, в комнате, освещенной солнечными лучами, так и в темных зонах, например в тени. Система камеры с низким уровнем динамического диапазона будет не способна передавать детали сцены в самых освещенных или в самых затененных зонах, а может быть и в тех и в других зонах.
A.3 фокусное расстояние (3.11): В контексте оптических систем камер, обычно используемых у роботов для работы в экстремальных условиях, короткое фокусное расстояние соответствует камере с широкой зоной обзора (объективу с переменным фокусным расстоянием, у которого масштаб уменьшен), а длинное фокусное расстояние соответствует камере с узкой зоной обзора (объективу с переменным фокусным расстоянием, у которого масштаб увеличен).
А.4 система центрального зрения (3.10): Система центрального зрения имитирует свойства человеческого глаза, у которого центр зрения (фовеа) имеет значительно лучшую остроту, чем периферия. Данный эффект может быть достигнут разными способами, включая использование объективов типа "рыбий глаз", нескольких близко расположенных камер или встроенных датчиков изображения с переменным разрешением. Использование центрального зрения позволяет ресурсам робота (пропускной способности, обработке данных и др.) сконцентрироваться в центре изображения, где это важно, сохраняя при этом некоторый уровень периферического зрения. Однако это может добавить трудности или сложности, или и того и другого, при интерпретации полученных изображений.
А.5 частота кадров (3.13): Частота кадров хорошо определена для систем камер, которые представляют кадры на дисплее удаленного оператора один за другим с постоянным интервалом в виде полноценного изображения. В таких системах частота кадров - это просто скорость, с которой эти изображения или кадры представляются оператору. Современные системы камер усложняют это определение разными способами. Некоторые системы часто пропускают или "отбрасывают" кадры, либо намеренно, чтобы уменьшить полосу пропускания, либо непреднамеренно, когда связь разорвана или ухудшена. Некоторые системы, особенно аналоговые, используют процесс "чередования", обновляя нечетные строки пикселей на одном кадре, а затем четные строки на следующем кадре. В таких системах каждая совокупность строк, обновляемых вместе, называется "полями", а частота кадров условно считается равной половине "частоты полей". Во многих системах, цифровых или аналоговых, используется так называемый "шторный" затвор. В то время как изображения представляются оператору в каждый момент времени в виде целого изображения, камера фактически собирает информацию с верхней части изображения до нижней части изображения. Наконец, некоторые цифровые системы с адаптивным временным сжатием, например, системы, использующие сжатие MPEG4, могут обновлять разные части изображения с разной скоростью в зависимости от количества движения в каждой части (измеряемого разными алгоритмами).
А.6 изображение (3.4): Настоящий стандарт рассчитан на датчики, формирующие изображения, которые работают в видимом для человека и в ближнем инфракрасном спектре. Примерами датчиков изображения являются цветные и тепловые камеры, у которых размерность каждой ячейки предусматривает три позиции для цвета и одну для температуры. Другими примерами таких датчиков являются формирующие изображение сонары и дальномерные камеры. Данное определение специально исключает изображения, сгенерированные с помощью ортогональной проекции (например, карты), где каждый пиксель представляет физическое расстояние, а не угловое отклонение.
А.7 резкость (изображения) (3.8): Резкость является непосредственной мерой способности системы камеры различать небольшие объекты на фиксированном расстоянии. Для повышения значимости относительно эксплуатационных задач данная мера представлена процентным отношением среднего человеческого зрения, принимаемого равным 6/6 в метрической системе, что соответствует способности различать объект, соответствующий по размеру одной угловой минуте. Это соответствует способности различать чередование черных и белых полос с заданным интервалом х на расстоянии x/tg(0,0167°). Для зрения 6/6 это соответствует способности различать:
1) чередование черных и белых полос с интервалом 0,12 мм на расстоянии 0,4 м;
2) чередование черных и белых полос с интервалом 1,8 мм на расстоянии 6 м.
Процентное отношение выражается в размере интервалов между строками. Например, система камеры, которая способна различать только чередующиеся черные и белые строки, разделенные интервалами 18 мм на расстоянии 6 м, имеет остроту зрения 10% от зрения человека 6/6.
При определении или сравнении системы камеры робота следует особое внимание уделить остроте технического зрения наряду, по крайней мере, с зоной обзора и разрешением изображения. Система, которая имеет хорошую остроту зрения, но узкую зону обзора (и, соответственно, плохое разрешение изображения), например, камера низкого качества с очень малым углом обзора, обеспечивает представление сцены как через "соломинку для питья", которое дает плохую информацию об окружающей обстановке.
Острота технического зрения может варьироваться в пределах зоны обзора данной системы камеры, в то время как в настоящем стандарте рассмотрена только острота технического зрения, измеренная в наилучшей части изображения, выбранной оператором.
Острота технического зрения отражает способность системы камеры различать мелкие детали. Данное измерение носит угловой характер и, следовательно, инвариантно к расстоянию. Для заданной остроты зрения наименьший объект, который может быть различен на расстоянии 1 м, будет вдвое меньше наименьшего объекта, который может быть различен на расстоянии 2 м, при одинаковости всех остальных факторов, таких как фокусное расстояние, освещенность и свойства объекта.
А.8 зона обзора (3.3): Зона обзора определяет размер сцены, которую можно наблюдать на данном изображении, представленном на видеомониторе операторского пульта управления. Настоящий стандарт не учитывает искажения в изображении, а рассматривает только изображение, представленное оператору. Для короткофокусных (широкоугольных) объективов с существенным искажением или видеомониторов с покрытием, которое затеняет части изображения, измеренная зона обзора может значительно отличаться от теоретической зоны обзора любого компонента системы камеры. При определении или сравнении способностей роботов следует особое внимание уделить зоне обзора наряду, по крайней мере, с остротой зрения и разрешением изображения. Система камеры может иметь очень большую зону обзора, но только среднее разрешение изображения. Это приведет к плохой остроте зрения и, следовательно, к неспособности различать мелкие детали сцены.
Зона обзора характеризует размер внешней среды, отображаемой в одном кадре, переданном из системы камеры. При этом можно говорить о "широком" или, наоборот, "увеличенном" изображении. Зона обзора является чисто геометрическим показателем и измеряется в градусах. Чем больше показатель в градусах, тем шире зона обзора. Широкая зона обзора позволяет осмотреть большую часть внешней среды без перемещения или настройки робота или камеры. Наоборот, узкая зона обзора концентрирует зрение на небольшом участке сцены, в результате чего появляется возможность рассматривать более мелкие или более отдаленные объекты при осмотре внешней среды. Зона обзора в горизонтальном и вертикальном направлениях может быть усреднена, чтобы охарактеризовать зону обзора одним числом.
А.9 разрешение изображения (3.7): Разрешение изображения является мерой количества визуальной информации, которую система камеры робота способна передать оператору (независимо от ее зоны обзора). Оно измеряется как число четко различаемых черных и белых полос в горизонтальном, вертикальном и диагональном направлениях в расчете на высоту изображения. Измерение в расчете на высоту изображения нормализует результат относительно разных форматов изображения.
В настоящем стандарте "разрешение изображения" означает измеренное разрешение изображения, наблюдаемого системой камеры и представляемого оператору, а не разрешение какой-либо одной части системы (например, датчика камеры, блока обработки изображения или дисплея).
Разрешение изображения отражает общий объем визуальной информации, передаваемой камерой оператору. Изображение с высоким уровнем разрешения изображения может быть описано как "резкое" или "четкое". И наоборот, изображение с низким уровнем разрешения изображения может быть описано как "пиксельное" или "размытое". Разрешение изображения измеряют в пределах расстояния, обеспечивающего наилучшую фокусировку системы камеры. Эти пределы определяет изготовитель или заказчик испытаний или они оба. Пределы должны соответствовать наилучшим характеристикам камеры робота в заданных условиях.
В настоящем стандарте разрешение изображения в горизонтальном, вертикальном и диагональном направлениях измеряется в числе полос на высоту изображения, поскольку такое измерение инвариантно как к формату изображения, так и к размерам дисплея. Следует обратить особое внимание на то, чтобы избежать путаницы с другими широко используемыми определениями разрешения изображения, в которых горизонтальное, вертикальное и диагональное направления измеряются в терминах размеров высоты, ширины и диагонали изображения в пикселях (при этом существует зависимость от формата изображения) или пикселях на миллиметр или дюйм (при этом существует зависимость от размеров дисплея).
Определение разрешения в терминах полос на высоту изображения позволяет данному показателю быть инвариантным к формату изображения системы камеры и напрямую сравнивать полученные значения во всех трех направлениях. Использование высоты изображения, а не ширины, является стандартом, берущим начало из передачи аналогового видео, которая основана на сканировании горизонтальных строк. Сравнение разрешения изображения в трех направлениях часто полезно для выявления недостатков в системе камеры. Разрешение изображения в горизонтальном направлении часто снижается при передаче аналогового видео с неподходящим преобразованием сигнала, в то время как разрешение изображения в диагональном направлении часто снижается при цифровом сжатии изображений. Данный метод испытаний оценивает всю систему камеры и таким образом измеряет эффективное разрешение изображения всей системы, включая оптику, датчик, электронику, обработку изображения, передачу и видеомонитор. Измеренное разрешение изображения может сильно отличаться от теоретического разрешения любой одной части системы камеры.
А.10 QR-код (3.15): Исходная спецификация данного кода была разработана компанией Denso Wave Company. Эти коды иногда рассматривают как разновидность двумерного штрих-кода.
А.11 штриховой клин (3.14): Штриховой клин используется для измерения разрешения изображения системы камеры. Позиция на штриховом клине, в которой линии больше не различаются, соответствует разрешению изображения системы камеры.
Приложение В
(справочное)
Примеры результатов испытаний и форма протокола
Таблица В.1 - Примеры результатов испытаний остроты технического зрения
Робот | Тип робота | Расстояние для испытания, м | Средняя острота зрения, мм | Стандартное отклонение, мм |
А | Широкоугольная камера | 6,0 | 3,9 | 0,4 |
В | Узкоугольная камера | 6,0 | 1,3 | 0,14 |
С | Воздушный робот | 6,0 | 1,6 | 0,25 |
D | Наземный робот | 6,0 | 1,3 | 0,13 |
Е | Наземный робот | 0,4 | 0,36 | 0,055 |
|
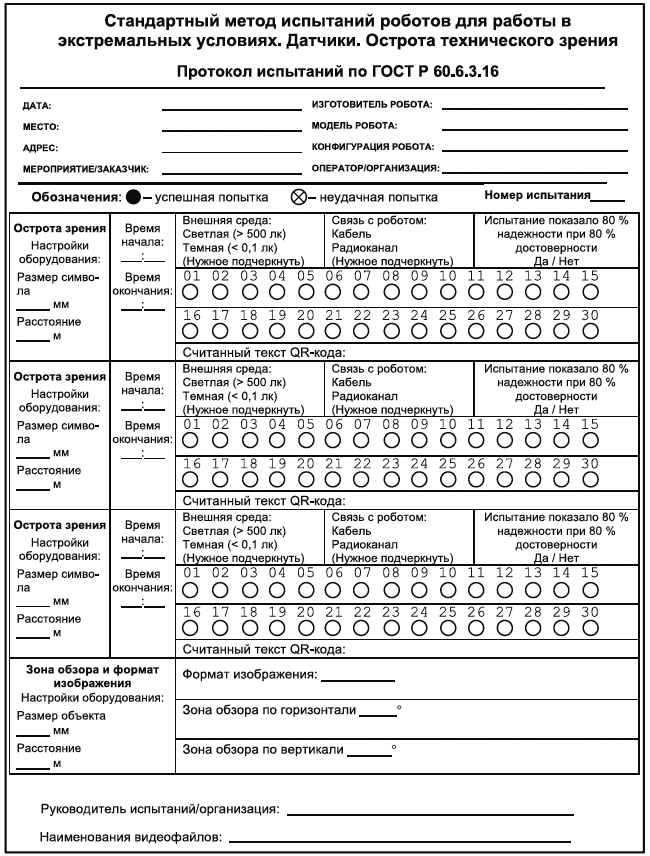
Рисунок В.1 - Пример формы протокола испытаний
Приложение ДА
(справочное)
Сведения о соответствии ссылочных национальных стандартов стандартам, использованным в качестве ссылочных в примененном стандарте
Таблица ДА.1
Обозначение ссылочного национального стандарта | Степень соответствия | Обозначение и наименование ссылочного стандарта |
ГОСТ Р 60.6.3.1-2019 | MOD | ASTM Е2521-16 "Стандартная терминология для оценки возможностей роботов для работы в экстремальных условиях" |
ГОСТ Р ИСО/МЭК 18004-2015 | IDT | ISO/IEC 18004:2015 "Информация. Технологии автоматической идентификации и сбора данных. Спецификация символики штрихового кода QR" |
Примечание - В настоящей таблице использованы следующие условные обозначения степени соответствия стандартов: | ||
УДК 621.865.8:007.52:006.86:006.354 | ОКС 13.200 |
Ключевые слова: роботы, робототехнические устройства, методы испытаний, роботы для работы в экстремальных условиях, датчики, техническое зрение, острота зрения, порядок проведения испытаний, испытательное оборудование, операторский пульт управления, рабочее место оператора, телеуправление | |
Электронный текст документа
и сверен по:
, 2020

{kind=link}