ГОСТ 29107-91
(МЭК 748-2-85)
Группа Э00
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Приборы полупроводниковые
МИКРОСХЕМЫ ИНТЕГРАЛЬНЫЕ
Часть 2
Цифровые интегральные схемы
Semiconductor devices. Integrated circuits.
Part 2. Digital integrated circuits
МКС 31.200
ОКСТУ 6230
Дата введения 1992-07-01
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1. ВНЕСЕН Министерством электронной промышленности СССР
2. УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Государственного комитета СССР по управлению качеством продукции и стандартам от 27.09.91 N 1556
3. Настоящий стандарт подготовлен методом прямого применения международного стандарта МЭК 748-2-85 "Полупроводниковые приборы. Интегральные схемы. Часть 2. Цифровые интегральные схемы" и полностью ему соответствует
4. ССЫЛОЧНЫЕ НОРМАТИВНО-ТЕХНИЧЕСКИЕ ДОКУМЕНТЫ
Глава, раздел, пункт, в которых приведены ссылки | Обозначение соответствующего международного стандарта | Обозначение отечественного нормативно-технического документа, на который дана ссылка |
Глава I, п.1 | МЭК 747-1-83 | |
Глава II, п.6 | ||
Глава III, разд.1, п.12 | ||
Глава III, п.14 | ||
Глава III, разд.2, А, п.10 | ||
Глава III, разд.2, А, п.12 | ||
Глава III, разд.2, В, п.13 | ||
Глава III, разд.3, п.6 | ||
Глава III, разд.3, п.8 | ||
Глава IV, разд.1, п.1 | ||
Глава I, п.1 | МЭК 748-1-84 | ГОСТ 29106-91 |
Глава II, п.6 | ||
Глава III, разд.1, п.4 | ||
Глава IV, разд.1, п.1 | ||
Глава V, разд.1, п.1 | ||
Глава V, разд.1, п.2.3 |
5. ПЕРЕИЗДАНИЕ. Сентябрь 2004 г.
Предисловие
1. Официальные решения или соглашения МЭК по техническим вопросам, подготовленные техническими комитетами, в которых представлены все заинтересованные национальные комитеты, выражают с возможной точностью международную согласованную точку зрения по рассматриваемым вопросам.
2. Эти решения представляют собой рекомендации для международного пользования и в этом виде принимаются национальными комитетами.
3. В целях содействия международной унификации МЭК выражает пожелание, чтобы все национальные комитеты приняли настоящий стандарт МЭК в качестве своего национального стандарта, насколько это позволяют условия каждой страны. Любое расхождение со стандартом МЭК должно быть четко указано в соответствующих национальных стандартах.
Введение
Настоящий стандарт подготовлен Техническим комитетом МЭК N 47 "Полупроводниковые приборы".
Публикация МЭК 748-2 представляет собой вторую часть общего стандарта на интегральные схемы (Публикация МЭК 748).
В дополнение к общим требованиям Публикации МЭК 747-1 и МЭК 748-1, в настоящем стандарте содержатся все сведения по цифровым интегральным схемам.
На совещании, состоявшемся в Лондоне в сентябре 1982 г., Технический комитет МЭК N 47 одобрил переиздание Публикаций МЭК 147 и МЭК 148 на основе нового принципа в зависимости от вида рассматриваемого прибора. Поскольку все части, составляющие настоящий стандарт, были ранее утверждены для издания согласно Правилу шести или двух месяцев, новое голосование было признано нецелесообразным.
Сведения относительно интегральных схем, содержавшиеся в Публикациях МЭК 147 и МЭК 148, включены в Публикации МЭК 747-1 и МЭК 748.
Сведения относительно механических и климатических испытаний, содержавшиеся ранее в Публикациях МЭК 147-5 и МЭК 147-5А, включены в Публикацию МЭК 749.
Соответствие данного стандарта современному уровню техники будет обеспечиваться путем пересмотра и дополнения его, по мере дальнейшей работы Технического комитета МЭК N 47, с учетом последних достижений в области интегральных схем.
Настоящий стандарт полностью аннулирует Публикации МЭК 147-1 и МЭК 147-2.
Таблица соответствия новых и прежних пунктов
Номер нового пункта | Номер прежнего пункта | Документ или Публикация | |
Глава II | |||
1.1 | 1 | 147-0D, VI, А | |
1.1.1 | 1.1 | 147-0Е, VI, А | |
1.1.2 | 1.2 | 147-0D, VI, А | |
1.1.3 | 1.3 | 147-0D, VI, А | |
1.1.4 | 1.4 | 147-0D, VI, А | |
1.1.5 | 1.9 | 147-0D, VI, А | |
1.1.6 | 1.39 | 147-0F, VI, А | |
1.2.1 | 1.7 | 147-0D, VI, А | |
1.2.2 | 1.8 | 147-0D, VI, А | |
1.2.3 | 1.13 | 147-0D, VI, А | |
1.2.4 | 1.14 | 147-0D, VI, А | |
1.2.5 | 1.17 | 147-0D, VI, А | |
1.2.6 | 1.18 | 147-0D, VI, А | |
1.2.7 | 1.19 | 147-0D, VI, А | |
1.2.8 | 1.20 | 147-0D, VI, А | |
1.2.9 | 1.21 | 147-0D, VI, А | |
1.2.10 | 1.22 | 147-0D, VI, А | |
1.2.11 | 1.27 | 147-0D, VI, А | |
1.2.12 | 1.32 | 147-0Е, VI, А | |
1.2.13 | 1 | 47(ЦБ) 794 | |
1.2.14 | 2 | 47(ЦБ) 794 | |
1.2.15 | 3 | 47(ЦБ) 794 | |
1.2.16 | 4 | 47(ЦБ) 794 | |
1.2.17 | 5 | 47(ЦБ) 794 | |
1.2.18 | 6 | 47(ЦБ) 794 | |
1.2.19 | 8 | 47(ЦБ) 794 | |
1.2.20 | 9 | 47(ЦБ) 794 | |
1.2.21 | 10 | 47(ЦБ) 794 | |
1.2.22 | 11 | 47(ЦБ) 794 | |
1.3.1 | 1.5 | 147-0D, VI, А | |
1.3.2 | 1.6 | 147-0D, VI, А | |
1.3.3 | 1.10 | 147-0D, VI, А | |
1.3.4 | 1.11 | 147-0D, VI, А | |
1.3.5 | 1.12 | 47-0D, VI, А | |
1.3.6 | 1.23 |
| 147-0D, VI, А |
1.3.6.1-1.3.6.3 | - | 47(ЦБ) 945 | |
1.3.7 | 1.24 | 147-0D, VI, А | |
1.3.8 | 1.25 | 147-0D, VI, А | |
1.3.9 | 1.26 | 147-0D, VI, А | |
1.3.10 | 1.28 | 147-0Е, VI, А | |
1.3.11 | 1.29 | 147-0Е, VI, А | |
1.3.12 | 1.30 | 147-0Е, VI, А | |
1.3.13 | 1.31 | 147-0Е, VI, А | |
1.3.14 | 7 | 47(ЦБ) 794 | |
1.3.15 | - | 47(ЦБ) 945 | |
1.4.1 | - | 47(ЦБ) 944 | |
1.4.2 | 1.15 | 147-0D, VI, А | |
1.4.3 | 1.16 | 147-0D, VI, А | |
1.4.4 | 1.33 |
| 147-0Е, VI, А |
1.4.5-1.4.8 | 1.34-1.37 | 147-0Е, VI, А | |
1.4.9-1.4.15 | - | 47(ЦБ) 875 | |
1.4.16 | 1.38 | 147-0F, VI, А | |
2.1 | 2.1 | 147-0D, VI, А | |
2.2.1-2.2.2.15 | 2.2-2.2.2.15 | 147-0D, VI, А | |
2.2.2.16 | 2.2.2.16 | 147-0Е, VI, А | |
3.1.1 | 1.1 | 147-0Е, VI, D | |
3.1.2 | 1.2 | 147-0Е, VI, D | |
3.1.3 | 1.3 | 147-0F, VI, D | |
3.1.4 | 1.4 | 147-0F, VI, D | |
3.1.5 | 1.5 | 147-0F, VI, D | |
3.1.6 | 1 | 47(ЦБ) 792 | |
3.1.7 | - | 47(ЦБ) 945 | |
3.2.1 | 2.1 | 47(ЦБ) 792 | |
3.2.2 | 2.2 | 47(ЦБ) 792 | |
3.2.3 | 2.3 | 47(ЦБ) 792 | |
3.3.1-3.3.6 | 2.1-2.6 | 147-0Е, VI, D | |
3.3.7 | 2.7 | 147-0F, VI, D | |
3.3.8 | 2.8 | 147-0F, VI, D | |
3.4.1 | 3.1 | 147-0F, VI, D | |
3.4.2 | 3.2 | 147-0F, VI, D | |
3.4.3 | 3.3 | 147-0Е, VI, D | |
3.4.4 | 3.4 | 147-0F, VI, D | |
3.4.5 | 3.5 | 147-0F, VI, D | |
3.4.6 | 3.6 | 147-0F, VI, D | |
3.4.7 | - | 47(ЦБ) 876 | |
3.5 | 4 | 147-0F, VI, D | |
4.1 | 1.40 | 147-0F, VI, D | |
5 | - | 47(ЦБ) 874 | |
6 | Новый | - | |
7.1-7.6 | - | 47(ЦБ) 793 | |
7.7 | - | 47(ЦБ) 877 | |
Глава III | |||
Раздел I | |||
1-14, | 1-14 | 147-1D, VI, первый | |
за исключением 5.1.1 | - | 47А (ЦБ) 121 | |
Приложение | Приложение | 147-1D, VI, первый | |
Глава III | |||
Раздел II | |||
А: | |||
1-7.2.1 | 1-7.2.1 | 147-1D, VI, второй | |
7.2.2 | 7.2.2 | 47А(ЦБ) 104 | |
7.3-12 | 7.3-12 | 147-1D, VI, второй | |
В: | |||
1-13 | - | 47А(ЦБ) 122 | |
Глава III | |||
Раздел III | |||
1-8 | 1-8 | 147-1D, VI, третий | |
Глава IV | |||
Раздел I | |||
1 | 1.1 | 147-2L, VI, первый | |
2.1.1-2.1.7 | 1.1.1-1.1.7 | 147-2L, VI, первый | |
2.2.1 | 1.2.1 | 147-2L, VI, первый | |
2.2.2 | 1.2.2 | 147-2L, VI, первый | |
2.3 | Новый | - | |
3 | - | 147-2L, содержание | |
Глава IV | |||
Раздел II | |||
1-4 | 1-4 | 47А(ЦБ) 105 | |
5 | - | 47А(ЦБ) 120+146 | |
Глава IV | |||
Раздел III | |||
1-4.4 | 1-4.4 | 147-2L, VI, второй | |
4.5 | - | 47А(ЦБ) 141 | |
4.6 | - | 47А(ЦБ) 123 | |
5 | 5 | 147-2L, VI, второй | |
Глава V | |||
Раздел I | |||
1 | Ссылка на 748-1, | ||
2 | 5 | (147-4, II, второй, п.4) | |
Таблица I | Таблица III | 147-4, II, второй |
Глава I. ОБЩИЕ ПОЛОЖЕНИЯ
1. Введение
Настоящим стандартом следует пользоваться совместно с МЭК 747-1* и ГОСТ 29106 (МЭК 748-1), в котором приводятся все основополагающие данные:
- терминология;
- буквенные обозначения;
- основные предельно допустимые значения параметров и характеристики;
- методы измерений;
- приемка и надежность.
________________
* До прямого применения стандарта МЭК в качестве государственного стандарта рассылку данного стандарта МЭК на русском языке осуществляет ВНИИ "Электронстандарт".
2. Область применения
Настоящий стандарт применяется для разработки технических условий на интегральные микросхемы, в том числе подлежащие сертификации.
Стандарт устанавливает требования для следующих классов и подклассов приборов:
- комбинаторные и последовательностные цифровые схемы;
- интегральные схемы запоминающих устройств;
- интегральные схемы микропроцессоров;
- приборы с переносом заряда.
Глава II. ТЕРМИНОЛОГИЯ И ОБОЗНАЧЕНИЯ
1. Терминология для комбинаторных и последовательностных интегральных схем
1.1. Общие термины
Пояснительное примечание. Сигнал представляет собой физическое воплощение информации. Цифровой сигнал является зависимым от времени свойством или изменением физической величины, характеризующейся конечным числом неперекрывающихся диапазонов значений. Цифровой сигнал может быть использован для передачи или обработки информации. Учитывая существующую практику, ниже приводятся упрощенные определения. Что касается цифровых схем, то эта терминология не вызовет двусмысленности или неправильного толкования.
1.1.1. Цифровой сигнал
Изменение в зависимости от времени физической величины, которая характеризуется конечным числом неперекрывающихся диапазонов значений и используется для передачи или обработки информации.
Примечания:
1. Эта физическая величина может быть напряжением, током, полным сопротивлением и т.п.
2. Для удобства каждый диапазон значений может быть представлен одним значением, например номинальным.
1.1.2. Двоичный сигнал
Цифровой сигнал, характеризующийся только двумя возможными диапазонами значений.
Примечание. Для удобства каждый из диапазонов должен быть представлен одним значением, например номинальным.
1.1.3. Диапазон низкого уровня (двоичного сигнала)
Диапазон наименее положительных (наиболее отрицательных) уровней двоичного сигнала.
Примечание. Этот диапазон обозначается "-диапазон" и любой уровень в данном диапазоне "
-уровень".
1.1.4. Диапазон высокого уровня (двоичного сигнала)
Диапазон наиболее положительных (наименее отрицательных) уровней двоичного сигнала.
Примечание. Этот диапазон обозначается "-диапазон", а любой уровень в данном диапазоне - "
-уровень".
1.1.5. Вывод входа
Вывод, с помощью которого поданный на схему сигнал может изменить состояние на выходе схемы:
- либо непосредственно,
- либо косвенно, путем изменения реакции схемы на действие сигналов, поданных на другие выводы.
1.1.6. Выход с тремя состояниями
Выход двоичной схемы, которая является источником тока с относительно низким полным сопротивлением или элементом, поглощающим ток высокого и низкого уровней, на котором, кроме того, при определенных условиях на входе устанавливается состояние высокого полного сопротивления, близкое к состоянию разомкнутой цепи.
Примечание. В функциональных таблицах и функциональных матрицах состояние высокого полного сопротивления следует обозначать буквой .
1.2. Термины, относящиеся к функциям схем
1.2.1. Состояние на входе (двоичной схемы)
Сочетание - и
-уровней на выводах входа в данный момент времени.
1.2.2. Состояние на выходе (двоичной схемы)
Сочетание - и
-уровней на выводах выхода схемы в данный момент времени.
Примечание. В тех случаях, когда возможность неоднозначного толкования исключается, состояние на выходе может быть представлено сигналом - или
-уровнем на определенном выходе схемы (контрольном выходе).
1.2.3. Функциональная таблица
Форма представления необходимых или возможных соотношений между значениями цифровых сигналов на входах и выходах цифровой схемы. Эти значения цифровых сигналов либо непосредственно представлены в электрических величинах, либо путем указания электрической сущности обозначений (например, и
для двоичных схем).
В общем случае:
- в каждой колонке указаны значения цифровых сигналов на входе или выходе цифровой схемы;
- в каждой строке указаны комбинации значений цифровых сигналов на входе(ах) и соответствующие значения цифровых сигналов на выходе(ах);
- если значение цифрового сигнала на входе не определено, это следует отметить вопросительным знаком;
- если значение цифрового сигнала на входе не оказывает никакого влияния, его следует обозначить или
.
1.2.4. Таблица истинности (соотношение между цифровыми переменными)
Выражение логического соотношения между одной или несколькими независимыми цифровыми переменными с помощью таблицы, которая для каждого возможного сочетания значений независимых переменных дает соответствующие значения зависимых переменных.
Примечание. Необходимо четкое разграничение между "функциональной таблицей" и "таблицей истинности", так как в зависимости от произвольного выбора соотношения между значениями цифровых переменных и значениями электрических величин одна и та же цифровая схема может выполнять несколько различных логических операций.
1.2.5. Возбуждение
Состояние на входе или его изменение, которое способно:
- вызвать изменение состояния на выходе схемы либо непосредственно, либо в сочетании с предварительно установленным состоянием готовности, либо
- привести схемы в состояние готовности, либо
- отменить или видоизменить уже установившееся состояние готовности.
Примечания:
1. Однократное или многократное повторение определенного состояния возбуждения необязательно должно производить одинаковый эффект.
2. В некоторых случаях возбуждение способно также поддерживать то состояние на выходе схемы, которое могло быть им вызвано.
1.2.6. Активный уровень (цифрового сигнала на входе последовательностной схемы)
Уровень цифрового сигнала на входе, который способен вызвать возбуждение.
1.2.7. Активный переход (цифрового сигнала на входе последовательностной схемы)
Переход цифрового сигнала на входе от одного уровня к другому, который способен вызвать возбуждение.
Примечание. Активный переход может также зависеть от фронтов сигнала.
1.2.8. Стабильное состояние на выходе (последовательностной схемы)
Состояние на выходе схемы, которое сохраняется после того, как вызвавшее его возбуждение или любое другое возбуждение, поддерживающее данное состояние, было заменено состоянием на входе, которое не является возбуждением; либо состояние на выходе схемы, которое устанавливается при отсутствии возбуждения.
Примечание. Любое кратковременное сохранение состояния на выходе схемы, обусловленное такими нежелательными явлениями, как емкость, время хранения и время распространения сигнала и т.д., не учитывается.
1.2.9. Псевдостабильное состояние на выходе (последовательностной схемы)
Состояние на выходе схемы, которое не сохраняется после того, как вызвавшее его возбуждение или любое другое возбуждение, подтверждающее данное состояние, было заменено состоянием на входе, которое не является возбуждением.
Примечание. Любое кратковременное сохранение состояния на выходе схемы, обусловленное такими нежелательными явлениями, как емкость, время хранения и распространения сигнала и т.д., не учитывается.
1.2.10. Метастабильное состояние на выходе (последовательностной схемы)
Состояние на выходе схемы, которое сохраняется только в течение ограниченного промежутка времени после подачи соответствующего возбуждения.
Примечания:
1. Продолжительность метастабильного состояния на выходе зависит от характеристик схемы. Оно может зависеть от длительности вызвавшего его возбуждения и от воздействия повторных возбуждений.
2. Любое кратковременное сохранение состояние на выходе, обусловленное такими нежелательными явлениями, как емкость, время хранения и распространения сигнала и т.д., не учитывается.
1.2.11. Функциональная (последовательностная) матрица
Таблица, в которой для каждого состояния на входе приведены возможные состояния на выходе и можно непосредственно найти состояние(я) на выходе, являющееся(иеся) результатом перехода из одного состояния на каждом отдельном входе в любое другое состояние на входе.
Примечание. При необходимости наряду с функциональной (последовательностной) матрицей могут быть использованы дополнительные сведения, касающиеся временных параметров (например, время перехода для входных уровней, время задержки, продолжительность состояния на входе до достижения желаемого состояния на выходе).
1.2.12. Предварительный вход
Вход, подачей цифрового сигнала на который можно изменить реакцию схемы на сигналы на других выводах входа, не вызывая непосредственно изменения состояния на выходе схемы.
1.2.13. Вход сигнала разрешения
Вход, который, будучи в активном состоянии, делает возможным начало одной или нескольких определенных операций.
Примечания:
1. Сигнал разрешения:
а) делает возможным одну или несколько операций, пока сигнал поддерживается на заданном уровне, либо
b) активизирует фиксатор состояния, позволяющий продолжать операцию после прекращения подачи сигнала разрешения.
2. "Разрешение" - это общий термин. При необходимости его можно уточнить с помощью описательных прилагательных.
1.2.14. Вход сигнала разрешения кристалла
Вход сигнала разрешения, который в неактивном состоянии поддерживает интегральную схему в режиме холостого хода с ограниченным потреблением мощности.
1.2.15. Вход сигнала выбора кристалла
Вход сигнала разрешения, который в неактивном состоянии запрещает всякий вход или выход информации на интегральную схему или от нее.
1.2.16. Вход сигнала разрешения выхода
Вход сигнала разрешения, который в неактивном состоянии запрещает выход информации с интегральной схемы.
Примечание. При отсутствии сигнала разрешения выходы могут находиться в состоянии низкого уровня, в состоянии высокого уровня или в состоянии высокого полного сопротивления в зависимости от типа конкретной схемы.
1.2.17. Вход сигнала разрешения записи
Вход, который в активном состоянии разрешает ввод информации на хранение в запоминающее устройство.
1.2.18. Вход сигнала запрещения
Вход, который в активном состоянии запрещает выполнение одной или нескольких определенных операций.
Примечания:
1. Это альтернативные варианты термина "вход сигнала разрешения", подчеркивающие их комплементарный или отрицательный аспект.
2. В неактивном состоянии вход сигнала разрешения запрещает или предотвращает выполнение тех операций, которые он разрешает, будучи в активном состоянии. И, наоборот, вход сигнала запрещения в неактивном состоянии позволяет выполнять операцию(и), которой(ым) он препятствует, будучи в активном состоянии.
1.2.19. Потенциальный вход
Вход, продолжающий сохранять активность (вызывать возбуждение) до тех пор, пока его сигнал остается на активном уровне.
1.2.20. Импульсный вход
Вход, который активен (вызывает возбуждение) только при одном направлении перехода, или вход, вызывающий возбуждение только в том случае, если скорость перехода от одного уровня к другому достаточно велика.
1.2.21. Установка в заданное состояние
(ИСО) Привести счетчик в состояние, соответствующее заданному числу.
(ИСО) Установить запоминающее устройство в заданное состояние, как правило, отличное от того, которое соответствует нулю.
Примечание. В отличие от "возврата в исходное состояние".
1.2.22. Возврат в исходное состояние
(1) (ИСО) Привести счетчик в состояние, соответствующее начальному заданному числу.
(2) (ИСО) Восстановить запоминающее устройство в предусмотренное исходное состояние, необязательно соответствующее нулю.
Примечание. В отличие от "установки в заданное состояние".
1.3. Типы схем
1.3.1. Цифровая схема
Схема, предназначенная для работы с цифровыми сигналами на входе(ах) и выходе(ах).
Примечания:
1. В данном определении понятия "входы" и "выходы" не относятся к выводам статического источника питания.
2. Некоторые цифровые схемы, например определенные типы нестабильных схем, могут не иметь входа(ов).
1.3.2. Двоичная схема
Цифровая схема, предназначенная для работы с двоичными сигналами.
Примечание. Пары диапазонов значений двоичных сигналов могут быть различными на разных выводах схемы.
1.3.3. Комбинаторная (цифровая) схема
Цифровая схема, в которой каждой возможной комбинации цифровых сигналов на входах соответствует одна, и только одна, комбинация цифровых сигналов на выходах.
1.3.4. Последовательностная (цифровая) схема
Цифровая схема, в которой, по крайней мере, одной комбинации цифровых сигналов на входах соответствует более одной комбинации цифровых сигналов на выходах.
Примечание. Комбинации сигналов на выходах определяются работой схемы в предшествующий период и зависят от внутренней памяти, времени задержки и т.д.
1.3.5. Элементарная комбинаторная схема
Двоичная комбинаторная (цифровая) схема, имеющая только один вывод выхода, в которой сигнал на выходе принимает значение, встречающееся в функциональной таблице только один раз и только в том случае, если все значения сигналов, поданных на выводы входа, находятся в пределах - или
-диапазона.
Примечания:
1. Поскольку значение сигнала на выходе (встречающееся в функциональной таблице только один раз) может находиться в пределах - или
-диапазона, различают четыре типа элементарных комбинаторных схем.
В зависимости от того, какие двоичные значения 0 или 1 булевой алгебры приписываются сигналам - и
-диапазона, с помощью четырех типов элементарных комбинаторных схем можно осуществлять следующие логические операции:
,
,
![]() ,
,
![]() .
.
2. Сложные комбинаторные схемы могут быть составлены из элементарных комбинаторных схем или элементарных комбинаторных и инвертирующих схем.
1.3.6. Бистабильная схема
Последовательностная схема, которая имеет два, и только два, стабильных состояния на выходе.
Примечания:
1. Схемы этого типа можно подразделить на виды по числу и типу псевдо- и метастабильных состояний на выходе схемы и числу соответствующих возбуждений, необходимых для перехода из одного устойчивого состояния на выходе в другое.
2. Стабильное состояние на выходе бистабильной схемы может быть выражено значением - или
-уровня на эталонном выходе.
3. Термин "бистабильная схема" используется как общий термин для обозначения всех видов последовательностных схем, которые имеют два и только два стабильных состояния на выходе.
Этот термин может быть использован для обозначения любого вида или класса бистабильных схем, если его употребление не вызовет непонимания или двусмысленного толкования. В частности, сокращенный термин "бистабильная схема" часто используется для обозначения бистабильных схем, требующих только одного возбуждающего воздействия.
1.3.6.1. Бистабильная схема, запускаемая фронтом сигнала (активизируемая переходом)
Бистабильная схема, имеющая один или несколько входов, активизируемых переходом.
1.3.6.2. Бистабильная схема, запускаемая импульсным сигналом
Бистабильная схема, требующая подачи сигнала на предварительный вход до первого появления сигнала на пусковом входе и поддержания его после второго перехода на этом же входе, что приводит к изменению состояния на выходах.
Примечание. Это определение не исключает отрицательных значений минимального времени установления и/или сохранения.
1.3.6.3. Бистабильная схема с блокировкой данных
Бистабильная схема, требующая наличия сигналов на предварительных входах до и после перехода сигнала на пусковом входе, который не приводит к изменению состояния на выходах.
1.3.7. Моностабильная схема
Последовательная схема, имеющая только одно стабильное состояние на выходе.
Примечания:
1. Приведенное выше определение является наиболее общим. В настоящее время термин "моностабильная схема" предусматривает, что в дополнение к стабильному состоянию на выходе схема может иметь, по крайней мере, одно метастабильное состояние.
2. Обычно подобные схемы могут иметь одно или более метастабильных и/или псевдостабильных состояний на выходе.
1.3.8. Схема-расширитель
Вспомогательная схема, которая может быть использована для увеличения числа равнозначных входов соответствующей схемы без изменения ее функции.
1.3.9. Двоичная инвертирующая схема
Двоичная схема, имеющая только один вывод входа и один вывод выхода, в которой состояние -сигнала на входе обеспечивает получение состояния
-сигнала на выходе.
1.3.10. Система "ведущий - ведомый"
Система двух бистабильных схем, в которой одна из них, так называемая "ведомая", воспроизводит состояние на выходе другой схемы, называемой "ведущей". Передача информации с ведущей схемы на ведомую осуществляется с помощью соответствующего сигнала.
1.3.11. Регистр
Система бистабильных схем, с помощью которой информация может записываться, храниться и воспроизводиться.
Примечание. Регистр может представлять собой часть другого запоминающего устройства и обладать заданной емкостью.
1.3.12. Регистр сдвига
Регистр, который с помощью соответствующего сигнала управления может передавать информацию в заданном порядке между последовательно расположенными бистабильными схемами.
1.3.13. Счетчик
Последовательная схема для хранения чисел, позволяющая увеличивать или уменьшать их на постоянное значение, включая единицу.
1.3.14. Цифровая декодирующая интегральная схема
Система логических элементов (или эквивалентная схема), которая избирает одно или несколько выходных каналов в зависимости от комбинации сигналов на входе.
1.3.15. Программируемая логическая матрица
Интегральная схема, состоящая из матрицы комбинаторных логических элементов (схем) с фиксированным межсоединением, в который после изготовления могут быть произведены соединения или разрывы с целью выполнения особых логических функций.
Примечание. Программируемая логическая матрица представляет обычно большой набор логических элементов "", запускающих несколько элементов "
".
1.4. Термины, относящиеся к предельно допустимым значениям параметров и характеристикам
1.4.1. Пороговое напряжение (на входе)
Уровень входного напряжения, при прохождении которого изменяется логическое состояние на выходе.
Примечание. Термин "гистерезис", часто используемый в формах ТУ, представляет собой разность между пороговыми напряжениями при положительном и отрицательном переходах.
![]()
или
![]() .
.
1.4.1.1. Пороговое напряжение (на входе) при положительном переходе ,
Входное пороговое напряжение при возрастании входного напряжения.
Примечание. См. примечание к подпункту 1.4.1.
1.4.1.2. Пороговое напряжение (на входе) при отрицательном переходе ,
Входное пороговое напряжение при снижении входного напряжения.
Примечание. См. примечание к п.1.4.1.
1.4.2. Коэффициент нагрузки по входу (цифровой биполярной схемы)
Коэффициент, выражающий отношение входного тока на заданном выводе входа цифровой схемы к входному току конкретной схемы, взятой в качестве контрольной нагрузки.
Примечание. Контрольную нагрузку рекомендуется выбирать таким образом, чтобы коэффициент нагрузки по входу был целым числом.
1.4.3. Нагрузочная способность по выходу (цифровой биполярной схемы)
Коэффициент, выражающий отношение максимального выходного тока на заданном выводе выхода цифровой схемы к входному току конкретной схемы, взятой в качестве контрольной нагрузки.
Примечание. Контрольную нагрузку рекомендуется выбирать таким образом, чтобы нагрузочная способность по выходу выражалась целым числом.
1.4.4. Время установления
Интервал времени между подачей сигнала, который поддерживается на заданном выводе входа, и последующим активным переходом на другом заданном выводе входа.
Примечания:
1. Время установления измеряется между моментами, когда два сигнала достигают заданных значений в зоне перехода между двумя уровнями сигнала.
2. Время установления - это время между подачей двух сигналов; оно может быть недостаточным для получения желаемого результата. Учитывается минимальное значение, т.е. самый короткий интервал, при котором гарантируется правильная работа цифровой схемы.
3. Время установления может иметь отрицательное значение, в этом случае минимальный предел определяет самый длинный интервал (между моментом активного перехода и моментом подачи другого сигнала), при котором гарантируется правильная работа цифровой схемы.
1.4.5. Время удержания
Интервал времени, в течение которого сигнал удерживается на заданном выводе входа после активного перехода на другом заданном выводе входа.
Примечания:
1. Время удержания измеряется между моментами, когда величины двух сигналов достигают заданных значений в зоне перехода между двумя уровнями сигнала.
2. Время удержания - это время между подачей двух сигналов; оно может оказаться недостаточным для получения желаемого результата. Указывается минимальное значение, т.е. самый короткий интервал, при котором гарантируется правильная работа цифровой схемы.
3. Время удержания может иметь отрицательное значение; в этом случае минимальный предел определяет самый длинный интервал (между моментом активного перехода и моментом подачи другого сигнала), при котором гарантируется правильная работа цифровой схемы.
1.4.6. Время обращения
Интервал времени между окончанием одного входного импульса и началом следующего входного импульса, поданный на один и тот же вывод входа.
Примечания:
1. Время обращения измеряется между моментами, когда сигнал на входе достигает заданных значений в зоне перехода между двумя уровнями сигнала.
2. Время обращения - это время между двумя импульсами; оно может быть недостаточным для их распознавания. Указывается минимальное значение, т.е. самый короткий интервал, при котором гарантируется правильная работа цифровой схемы.
1.4.7. Время задержки переключения схемы из состояния высокого уровня в состояние низкого уровня (и наоборот)
Интервал времени между заданными контрольными точками на входном и выходном импульсах при переключении выхода в состояние низкого (высокого) уровня и при использовании определенных типовых устройств в качестве схем управления и нагрузки.
Примечания:
1. В некоторых случаях с целью испытания схемы управления и нагрузки могут быть заменены эквивалентными схемами, которые должны быть оговорены.
2. В качестве заданного контрольного уровня следует брать среднее значение между верхним пределом диапазона значений низкого уровня на входе и нижним пределом диапазона значений высокого уровня на входе.
1.4.8. Время перехода схемы из состояния высокого уровня в состояние низкого уровня (и наоборот)
Интервал времени между заданными контрольными точками по фронту выходного импульса при переходе выхода в состояние низкого (высокого) уровня и при подаче заданного входного сигнала через определенную цепь и подключении к выходу другой заданной цепи нагрузки.
1.4.9. Время разрешения
Интервал времени между заданной точкой на переходной характеристике сигнала разрешения и заданной точкой на характеристике выходного сигнала, означающий начало предусмотренной операции.
1.4.10. Время запрещения
Интервал времени между заданной точкой на переходной характеристике сигнала запрещения и заданной точкой на характеристике выходного сигнала, означающий окончание выполняемой операции.
1.4.11. Время разрешения на выходе (для выхода с тремя состояниями)
Интервал времени между заданными контрольными точками на характеристиках входного и выходного напряжения при переходе выхода с тремя состояниями от состояния высокого полного сопротивления (схема выключена) к одному из определенных активных уровней (высокому или низкому).
1.4.12. Время запрещения на выходе (для выхода с тремя состояниями)
Интервал времени между заданными контрольными точками на характеристиках входного и выходного напряжений при переходе выхода с тремя состояниями от одного из определенных активных уровней (высокого или низкого) к состоянию высокого полного сопротивления.
1.4.13. Длительность (ширина) импульса
Интервал времени между заданными контрольными точками по фронтам импульса.
1.4.14. Время сохранения
Интервал времени, в течение которого выходной сигнал является достоверным или в течение которого входной сигнал должен оставаться достоверным.
1.4.15. Время сохранения информации на выходе
Интервал времени, в течение которого сохраняется достоверная информация на выходе после изменения условий на входе, которые могут вызвать в конце данного интервала изменение информации на выходе.
1.4.16. Эквивалентная входная (выходная) емкость (двоичной схемы)
Емкость дискретного конденсатора, которая вызывает такое же изменение цифрового сигнала, что и емкостный компонент входного (выходного) полного сопротивления двоичной схемы.
2. Примеры
2.1. Эквивалентные комбинаторные схемы
2.1.1. Типы элементарных комбинированных схем и их функциональные таблицы.
а) Схема ,
![]()
Входы | Выход |
| |
| |
Все сочетания с |
b) Схема ![]() ,
, ![]()
Входы | Выход |
| |
| |
Все сочетания с |
с) Схема ,
![]()
Входы | Выход |
| |
| |
Все сочетания с |
d) Схема ![]() ,
, ![]()
Входы | Выход |
| |
| |
Все сочетания с |
е) Двоичный инвертор
Вход | Выход |
2.1.2. Выполнение логических операций элементарными комбинаторными схемами (для двух возможных обозначений - и
-сигналов через двоичные значения 0 и 1 булевой алгебры)
Схема | Обозначение | ||
Тип | Название | ||
а |
| ||
b |
|
|
|
с |
| ||
d |
|
|
|
2.2. Принцип описания бистабильных и подобных или последовательностных цифровых схем, показанный на примерах с применением буквенных обозначений
Приводятся два различных способа представления функциональных (последовательностных) матриц.
2.2.1. Вводная часть
2.2.1.1. Если поданный на вывод входа сигнал активен на -уровне или в момент перехода от
-уровня к
-уровню, то этот вход обозначается буквой без надстрочной черты.
Примеры: ,
,
…
Если поданный на вывод входа сигнал активен на -уровне (т.е. НЕ НА
-УРОВНЕ) или он активен в момент перехода от
-уровня к
-уровню (т.е. НЕ ВО ВРЕМЯ ПЕРЕХОДА ОТ
-УРОВНЯ К
-УРОВНЮ), то этот вход обозначается буквой с надстрочной чертой.
Примеры: ,
,
.
В том случае, если схема имеет как импульсный, так и потенциальный входы, во избежание противоречий предпочтение при обозначении следует отдавать импульсно
му входу.
2.2.1.2. Выводы выхода бистабильной схемы обозначаются буквами и
, причем
принят в качестве контрольного вывода выхода.
2.2.1.3. В двух стабильных состояниях уровня на выводах и
бистабильной схемы обычно являются взаимодополняющими.
Псевдостабильное состояние на выходе обозначается буквами или
или сочетанием этих букв, проставляемых в скобках после букв
.
Если при псевдостабильном состоянии на выходе уровни сигнала на выводах и
являются взаимодополняющими, в обозначении используются обе буквы
и
, причем первая из них обозначает уровень сигнала на выходе
.
Если при псевдостабильном состоянии на выходе уровня сигнала на выводах и
идентичны, для их обозначения используется только одна буква.
Примеры: ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Скобки и буквы, заключенные в них, могут быть опущены, если в них нет необ
ходимости.
2.2.1.4. Все прочие типы схем ,
![]() ,
, ,
![]() и т.д. могут быть описаны аналогично приводимым ниже примерам.
и т.д. могут быть описаны аналогично приводимым ниже примерам.
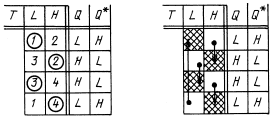
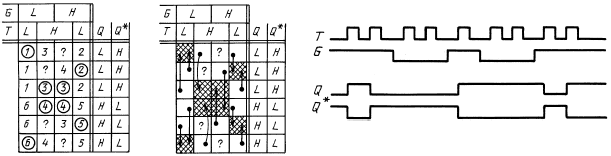
2.2.2. Схемы
2.2.2.1. ![]() схема
схема
Схема с двумя потенциальными входами и
. Сигнал на любом входе может быть активным только в состоянии высокого уровня (
-уровня).
Состояние на входе ![]() вызывает на входе состояние
вызывает на входе состояние ![]() . Переход сигнала на входе
. Переход сигнала на входе к низкому уровню (
-уровню) не оказывает влияния на состояние на выходе схемы.
Состояние на входе ![]() вызывает на выходе состояние
вызывает на выходе состояние ![]() . Переход сигнала на входе
. Переход сигнала на входе к низкому уровню (
-уровню) не оказывает влияния на состояние на выходе схемы.
Состояние на входе ![]() вызывает псевдостабильное состояние на выходе
вызывает псевдостабильное состояние на выходе ![]() . Одновременный переход сигналов на обоих входах от высокого уровня (
. Одновременный переход сигналов на обоих входах от высокого уровня (-уровня) к низкому уровню (
-уровню) вызывает непредвиденное стабильное состояние на выходе схемы.
Примечание. В некоторых случаях состояние на входе ![]() недопустимо по техническим причинам.
недопустимо по техническим причинам.
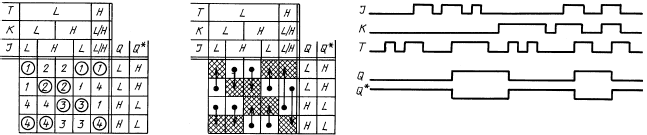
Функциональные (последовательностные) матрицы Временная диаграмма

Черт.1
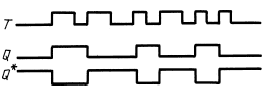
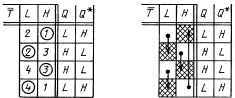
2.2.2.2. ![]() -схема
-схема
Схема с двумя потенциальными входами и
. Сигнал на любом входе может быть активным только в состоянии низкого уровня (
-уровня).
Состояние на входе ![]() вызывает на выходе состояние
вызывает на выходе состояние ![]() . Переход сигнала на входе
. Переход сигнала на входе к высокому уровню (
-уровню) не оказывает влияния на состояние схемы.
Состояние на входе ![]() вызывает состояние на выходе
вызывает состояние на выходе ![]() . Переход сигнала на входе к высокому уровню (
. Переход сигнала на входе к высокому уровню (-уровню) не оказывает влияния на состояние схемы.
Состояние на входе ![]() вызывает псевдостабильное состояние на выходе
вызывает псевдостабильное состояние на выходе ![]() . Одновременный переход сигналов на обоих входах от низкого уровня (
. Одновременный переход сигналов на обоих входах от низкого уровня (-уровня) к высокому уровню (
-уровню) вызывает непредвиденное стабильное состояние на выходе схемы.
Примечание. В некоторых случаях состояние на входе ![]() недопустимо по техническим причинам.
недопустимо по техническим причинам.
Функциональные (последовательностные) матрицы | Временная диаграмма |

Черт.2
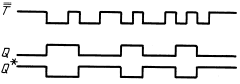
2.2.2.3. -схема
Схема с одним импульсным входом .
Переход сигнала на входе от низкого уровня (-уровня) к высокому уровню (
-уровню) вызывает изменение состояния на выходе схемы.
Переход сигнала на входе от высокого уровня (-уровня) к низкому уровню (
-уровню) не оказывает влияния на состояние на выходе схемы.
Функциональные (последовательностные) матрицы | Временная диаграмма |
|
|
Черт.3
2.2.2.4. -схема
Схема с одним импульсным входом .
При переходе подаваемого на вход сигнала от высокого уровня (
-уровня) к низкому уровню (
-уровню) происходит изменение состояния на выходе схемы.
Переход входного сигнала от низкого уровня (-уровня) к высокому уровню (
-уровню) не оказывает влияния на состояние на выходе схемы.
Функциональные (последовательностные) матрицы | Временная диаграмма |
|
|
Черт.4
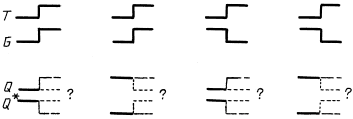
2.2.2.5. -схема (общее определение)
Схема с одним импульсным входом и одним потенциальным входом
.
Если на вход подан сигнал высокого уровня (
-уровня), схема функционирует как
-схема.
Если на вход подан сигнал низкого уровня (
-уровня) сигнал на входе
не оказывает влияния на состояние на выходе схемы.
Одновременный переход сигналов на обоих входах от низкого уровня (-уровня) к высокому уровню (
-уровню) на входе
и любой переход как от низкого уровня к высокому, так и наоборот на входе
вызывает непредвиденное состояние на выходе схемы.
Функциональные (последовательностные) матрицы | Временная диаграмма |
Черт.5
Временная диаграмма для общего случая  -схемы (продолжение)
-схемы (продолжение)
Функциональные (последовательностные) матрицы | Функциональные (последовательностные) матрицы |

Черт.6
2.2.2.6. -схема (с импульсными входами)
Схема с двумя импульсными входами и
, которые активны в момент перехода от низкого уровня (
-уровня) к высокому уровню (
-уровню).
При переходе подаваемого на вход сигнала от низкого уровня (
-уровня) к высокому (
-уровню) на выходе схемы устанавливается состояние
![]() . Переход сигнала на входе
. Переход сигнала на входе к низкому уровню (
-уровню) не оказывает влияния на состояние на выходе схемы.
При переходе подаваемого на вход сигнала от низкого уровня (
-уровня) к высокому (
-уровню) на выходе схемы устанавливается состояние
![]() . Переход сигнала на входе к низкому уровню (
. Переход сигнала на входе к низкому уровню (-уровню) не оказывает влияния на состояние на выходе схемы.
Одновременный переход сигналов на обоих входах от низкого (-уровня) к высокому уровню (
-уровню) изменяет состояние на выходе схемы. Переход любого или обоих входных сигналов к низкому уровню (
-уровню) не оказывает влияния на состояние на выходе схемы.
Функциональные (последовательностные) матрицы | Временная диаграмма |

Черт.7
2.2.2.7. -схемы (с импульсными входами)
Описание аналогично приведенному в п.2.2.2.6, но входы активны в момент перехода от высокого уровня (-уровня) к низкому (
-уровню).
2.2.2.8. -схема
Схема с двумя потенциальными входами и
.
Пока на вход подается сигнал высокого уровня (
-уровня), на контрольном входе
возникает сигнал того же уровня, что и на входе
.
При переходе сигнала на входе от высокого уровня (
-уровня) к низкому (
-уровню) состояние на выходе схемы не изменяется. Пока на вход
подается сигнал низкого уровня (
-уровня), сигнал на входе
не оказывает влияния на состояние на выходе схемы.
Одновременный переход сигналов на обоих входах (от высокого уровня (-уровня) к низкому (
-уровню) на входе
и любой переход как от высокого уровня к низкому, так и наоборот на входе
) вызывает непредвиденное состояние на выходе схемы.
Функциональные (последовательностные) матрицы (данные матрицы справедливы только для случая, | Временная диаграмма |

Черт.8
2.2.2.9. -схема
Схема с двумя потенциальными входами и
.
Пока на вход подается сигнал низкого уровня (
-уровня), на контрольном выходе
возникает сигнал того же уровня, что и на входе
.
При переходе сигнала на входе от низкого уровня (
-уровня) к высокому (
-уровню) состояние на выходе схемы не изменяется.
Пока на вход подается сигнал высокого уровня (
-уровня), сигнал на входе
не влияет на состояние схемы.
Одновременный переход сигналов на обоих входах (на входе от низкого уровня (
-уровня) к высокому (
-уровню); на входе
как от низкого уровня к высокому, так и наоборот) вызывает непредвиденное состояние на выходе схемы.
Функциональные (последовательностные) матрицы (данные матрицы справедливы только в тех случаях, когда вход | Временная диаграмма |

Черт.9
2.2.2.10. -схема
Схема с одним потенциальным входом и одним импульсным входом
.
При переходе сигнала на входе от низкого уровня (
-уровня) к высокому (
-уровню) на контрольном выходе
появляется сигнал того же уровня, что и сигнал на входе
.
При переходе сигнала на входе от высокого уровня (
-уровня) к низкому (
-уровню) состояние на выходе схемы не изменяется.
Пока на входе сохраняется сигнал низкого (
-уровня) или высокого уровня (
-уровня), сигнал на входе
не оказывает влияния на состояние схемы.
Функциональные (последовательностные) матрицы (данные матрицы справедливы только в том случае, если вход | Временная диаграмма |
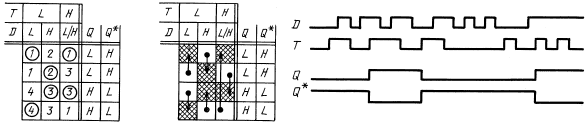
Черт.10
2.2.2.11. -схема
Схема с одним потенциальным входом и одним импульсным входом
.
При переходе сигнала на входе от высокого уровня (
-уровня) к низкому (
-уровню) на контрольном выходе
появляется сигнал того же уровня, что и сигнал на входе
.
При переходе сигнала на входе от низкого уровня (
-уровня) к высокому (
-уровню) состояние на выходе схемы не изменяется.
Пока на входе сохраняется сигнал низкого уровня (
-уровня) или сигнал высокого уровня (
-уровня), сигнал на входе
не оказывает влияния на состояние схемы.
Функциональные (последовательностные) матрицы (данные матрицы справедливы только в том случае, если вход | Временная диаграмма |
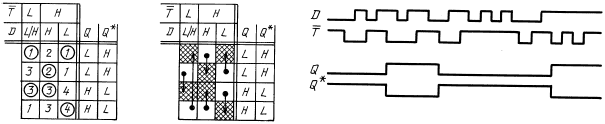
Черт.11
2.2.2.12. ![]() -схема
-схема
Схема с тремя потенциальными входами ,
и
, для которых активным является высокий уровень (
-уровень).
Пока на вход подается сигнал высокого уровня (
-уровня), схема работает как
![]() -схема. При переходе сигнала на входе
-схема. При переходе сигнала на входе от высокого уровня (
-уровня) к низкому (
-уровню) состояние на выходе схемы не изменяется при условии, что оно не является псевдостабильным.
При псевдостабильном состоянии на выходе схемы, т.к. при ![]() переход сигнала на входе
переход сигнала на входе от высокого уровня (
-уровня) к низкому (
-уровню) создает непредвиденное состояние на выходе схемы.
Пока на вход подается сигнал низкого уровня (
-уровня) сигналы на входах
и
не оказывают влияния на состояние схемы.
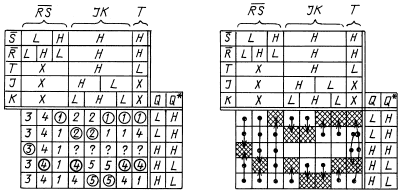
Функциональные (последовательностные) матрицы | Временная диаграмма |

Черт.12
2.2.2.13. ![]() ,
, ![]() и
и ![]() -схемы
-схемы
Описания этих схем аналогичны описанию, приведенному в п.2.2.2.12.
2.2.2.14. ![]() -схема
-схема
Схема с двумя потенциальными входами и
и одним импульсным входом
.
При переходе сигнала на входе от низкого уровня (
-уровня) к высокому (
-уровню) состояние на выходе схемы, соответствующее уровням сигналов на входах
и
, создает следующие состояния на выходе схемы:
- для состояния на входе ![]() - состояние на выходе
- состояние на выходе ![]() ;
;
- для состояния на входе ![]() - состояние на выходе
- состояние на выходе ![]() ;
;
- для состояния на входе ![]() - состояние на выходе изменяется;
- состояние на выходе изменяется;
- для состояния на входе ![]() - состояние на выходе остается без изменения.
- состояние на выходе остается без изменения.
Переход сигнала на входе от высокого уровня (
-уровня) к низкому уровню (
-уровню) не оказывает влияния на состояние схемы. Если на вход
подается сигнал высокого (
-уровня) или низкого уровня (
-уровня), сигналы на входах
и
не влияют на состояние схемы.
Функциональные (последовательностные) матрицы (данные матрицы справедливы только в тех случаях, когда входы | Временная диаграмма |
Черт.13
Примечание. Определения других типов ![]() -схем находятся на рассмотрении.
-схем находятся на рассмотрении.
2.2.2.15. ![]() ,
, ![]() и
и -схемы
Описания этих схем аналогичны описанию, приведенному в п.2.2.2.14.
2.2.2.16. ![]() -схема
-схема
Функциональные (последовательностные) матрицы
3. Терминология для интегральных схем и запоминающих устройств (ЗУ)
3.1. Общие термины
3.1.1. Ячейки памяти (или элемент памяти)
Наименьшая секция ЗУ, в которую вводится или может вводиться элемент информации, в которой данная информация хранится или может храниться и из которой она может быть считана.
3.1.2. Запоминающее устройство
Интегральная схема, состоящая из ячеек памяти (элементов памяти) и обычно включающая в себя соединенные с нею схемы, выполняющие функции выборки адреса, усиления и т.д.
3.1.3. Зона хранения информации
Секция ЗУ, состоящая из одной или нескольких ячеек памяти и являющаяся наименьшей частью ЗУ, из которой может производиться выборка.
Примечание. Содержание зоны хранения информации обычно называют "слово".
3.1.4. Адрес
Набор битов, которыми определяется определенная зона хранения информации или соответствующие электрические сигналы, подаваемые на входы для выборки определенной зоны хранения.
3.1.5. Разрушающее считывание
Процесс считывания, при котором содержащаяся в зоне хранения информация не сохраняется.
3.1.6. Блок
Постоянный диапазон адресов запоминающего устройства.
Примечание. Число адресов, входящих в диапазон, часто равно 2.
3.1.7. Стирание
Изъятие информации из запоминающего устройства.
3.2. Общие термины, относящиеся к функционированию и организации памяти
3.2.1. Организация хранения информации
3.2.1.1. Организация на основе бита
Размещение, при котором каждая зона хранения состоит из одной ячейки памяти.
3.2.1.2. Организация на основе слова
Разрешение*, при котором каждая зона хранения состоит из определенного числа ячеек памяти, формирующих слово.
________________
* Текст соответствует оригиналу. - .
3.2.1.3. Организация на основе блока
Размещение, при котором зоны хранения образуют блок.
Примечание. Каждая зона хранения блока может состоять из разного числа ячеек памяти.
3.2.2. Представление информации
3.2.2.1. Параллельное представление информации
Одновременная передача нескольких битов данных на отдельные каналы или шины.
3.2.2.2. Последовательное представление информации
Передача нескольких битов данных последовательно на один канал или шину.
3.2.3. Способ адресации
3.2.3.1. Параллельная адресация
Выборка зоны хранения путем одновременного представления каждого бита адреса.
3.2.3.2. Последовательная адресация
Выборка зоны хранения путем представления последовательно каждого бита адреса.
3.2.3.3. Мультиплексная адресация, последовательно-параллельная адресация
Выборка зоны хранения путем представления нескольких групп битов, которые вместе составляют адрес, причем биты каждой группы при этом представлены параллельно, а сами группы - последовательно.
3.3. Типы запоминающих устройств
3.3.1. Постоянное запоминающее устройство (ПЗУ)
Устройство, содержимое которого предназначено только для считывания и не должно изменяться в условиях нормальной работы.
Примечание. Если не оговорено иное, термин "постоянное запоминающее устройство" предполагает, что содержимое ЗУ определяется его конструкцией и остается постоянным.
3.3.1.1. Постоянное запоминающее устройство с заданной программой
ПЗУ, в котором содержимое каждой ячейки (элемента) определяется в процессе изготовления и впоследствии остается неизменным.
а) ПЗУ с масочным программированием
ПЗУ с заданной программой, в котором содержимое каждой ячейки (элемента) определяется в процессе изготовления с помощью маски.
3.3.1.2. Постоянное запоминающее устройство, программируемое пользователем ПЗУ, содержимое каждой ячейки (элемента) которого после изготовления может изменяться.
a) Программируемое постоянное запоминающее устройство (ППЗУ)
ПЗУ, программируемое пользователем, содержимое каждой ячейки (элемента) которого может изменяться только один раз.
b) Перепрограммируемое постоянное запоминающее устройство
ПЗУ, программируемое пользователем, содержимое каждой ячейки (элемента) которого может изменяться более одного раза.
3.3.2. Оперативное запоминающее устройство (ОЗУ)
ЗУ, в котором выборка каждой ячейки (элемента) может быть произведена с помощью соответствующих электрических сигналов, подаваемых на вход, а хранимая информация может:
а) либо считываться на соответствующих выходах;
b) либо изменяться другими соответствующими электрическими сигналами, подаваемыми на вход.
3.3.3. Запоминающее устройство с произвольной выборкой (ЗУПВ)
ЗУ, которое обеспечивает доступ к любой зоне в любой заданной последовательности.
Примечание. Этот термин обычно относится к оперативным запоминающим устройствам, но может быть также применен и к постоянным запоминающим устройствам.
3.3.4. Статическое оперативное запоминающее устройство
ЗУ, в котором информация остается неизменной при отсутствии сигналов управления.
Примечания:
1. Слово "оперативное" может быть опущено, если это не приведет к двусмысленному толкованию.
2. В статическом ЗУ могут быть использованы динамические схемы адресации и/или считывания.
3.3.5. Динамическое оперативное запоминающее устройство
ЗУ, в котором для хранения информации необходима периодическая подача на ячейки (элементы) сигналов управления.
Примечания:
1. Слово "оперативное" может быть опущено, если это не приведет к двусмысленному толкованию.
2. Подобная периодическая подача сигналов управления обычно называется регенерацией.
3. В динамическом ЗУ могут использоваться статические схемы адресации и/или считывания.
4. Данное определение справедливо как в случае образования сигналов управления внутри ЗУ, так и вне его.
3.3.6. Запоминающее устройство с разрушением данных
ЗУ, в котором при отключении источников питания происходит разрушение содержащейся в нем информации.
3.3.7. Запоминающее устройство с последовательной выборкой
ЗУ, в котором выборка зон хранения может быть произведена только в заданной последовательности.
3.3.8. Запоминающее устройство с адресацией содержания (ассоциативное ЗУ)
ЗУ, из которого считывается вся информация, содержащаяся в зоне хранения, если часть ее совпадает с информацией, посредством которой производится адресация.
Примечание. Если совпадение происходит в нескольких зонах хранения, тогда обычно считывается информация из зоны хранения с наименьшим значением адреса.
3.4. Термины, относящиеся к предельно допустимым значениям параметров и характеристикам
3.4.1. Цикл
Последовательность операций, необходимых для осуществления одной из функций ЗУ.
Различают четыре возможных цикла:
а) считывание;
b) запись;
c) считывание-запись;
d) запись-считывание.
3.4.2. Время цикла (см. примечания 1, 2 и 3)
Интервал времени, необходимый для выполнения одного цикла, т.е. интервал времени между началом цикла и его окончанием.
a) Время цикла считывания
Интервал времени между началом и окончанием цикла считывания.
b) Время цикла записи
Интервал времени между началом и окончанием цикла записи.
c) Время цикла считывание-запись
Интервал времени между началом и окончанием цикла, в процессе которого осуществляется считывание и ввод новых данных.
d) Время цикла запись-считывание
Интервал времени между началом и окончанием цикла, в процессе которого осуществляется ввод, а затем считывание данных.
Примечания:
1. Термин "цикл считывание-переход-запись" иногда также используется вместо термина "цикл считывание-запись". Одно такое употребление не рекомендуется, так как термин "считывание-переход-запись" используется в другом контексте для указания того, что информация выбрана, обработана и вновь введена в ЗУ.
2. Эти параметры являются фактическими временными интервалами между двумя импульсами; они могут быть недостаточными для завершения операций ЗУ. В каждом случае оговаривается минимальное значение, т.е. самый короткий интервал времени, в течение которого ЗУ правильно выполнит соответствующую(ие) функцию(ии).
3. Под термином "окончание цикла" следует понимать момент, в который может начаться любой последующий цикл при нормальной работе ЗУ.
4. Цикл всегда выполняется для определенного адреса.
3.4.3. Время восстановления сигнала записи (см. примечание 1 к п.3.4.2)
Интервал времени между окончанием сигнала записи и началом нового цикла. Этот интервал необходим для восстановления нормальной работы ЗУ после операции записи.
3.4.4. Время восстановления сигнала считывания
Интервал времени, необходимый для переключения ЗУ из режима записи в режим считывания и для получения сигналов достоверной информации на выходе.
3.4.5. Время выборки
Интервал времени между подачей на вход заданного импульса и получением сигналов достоверной информации на выходе при наличии всех других необходимых входных сигналов.
Определение времени выборки может быть дано лишь относительно сигнала на выходе (операция считывания).
Примечание. Примеры различного времени выборки:
время выборки адреса - время между адресом на входе и информацией на выходе;
время выборки разрешения - время между разрешением на входе и информацией на выходе;
время выборки считывания - время между считыванием на входе и информацией на выходе.
Обычно для каждого времени выборки пользуются двумя значениями в зависимости от перехода выходного сигнала к высокому или низкому уровню.
3.4.6. Время регенерации
Интервал времени между началом последовательных сигналов, предназначенных для восстановления уровня в ячейке динамического ЗУ до его первоначального значения.
Примечание. Время регенерации - это фактическое время между двумя операциями регенерации; оно может быть недостаточным, чтобы предохранить хранящуюся информацию от разрушения. Оговаривается, что максимальное значение соответствует самому длинному интервалу времени, в течение которого гарантируется правильная работа ЗУ.
3.4.7. Время предзаряда (динамического ЗУ)
Интервал времени между заданными переходами на одном или нескольких входах, необходимый для того, чтобы зарядить или разрядить внутренние узлы схемы до заданных уровней напряжения перед началом нового цикла.
Примечание. Определение относится к действительному интервалу времени предзаряда, определяемому системой, в которой должен работать прибор. Минимальное значение соответствует самому короткому интервалу времени, в течение которого гарантируется правильная работа ЗУ.
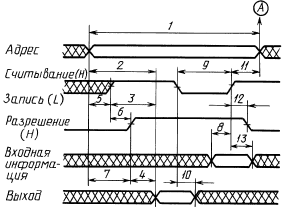
3.5. Типовые временные диаграммы для статического ОЗУ
Примечание. Для иллюстрации определений к понятию "время цикла" (приведенных в п.3.4.2) приведены четыре режима работы для четырех временных диаграмм. Эти диаграммы даны лишь в качестве примеров для статических ЗУ и не представляют какое-либо конкретное ЗУ. Диаграммы не предназначены для определения точных точек на графе сигналов, между которыми измеряются различные временные интервалы. Подобные точки должны быть приведены в ТУ на конкретную интегральную схему. На диаграммах приведены также некоторые дополнительные термины с целью пояснения, поскольку в настоящее время для них не существует официально принятых названий или определений.
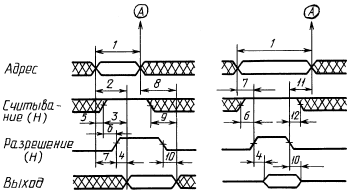
Цикл считывания
| вход: безразлично; |
Типовые временные диаграммы:
1 - время цикла считывания; 2 - время выборки адреса; 3 - время выборки считывания; 4 - время выборки разрешения; 5 - время установления сигнала адреса до сигнала считывания; 6 - время установления сигнала считывания до сигнала разрешения; 7 - время установления сигнала адреса до сигнала разрешения; 8 - время сохранения информации на выходе после сигналов адреса; 9 - время сохранения информации на выходе после сигнала считывания; 10 - время сохранения информации на выходе после сигнала разрешения; 11 - время удержания сигнала адреса после сигнала разрешения; 12 - время удержания сигнала считывания после сигнала разрешения
Черт.14
Точка соответствует самому раннему моменту, в который может начаться следующий цикл.
Активные уровни на входах считывания и разрешения обозначены буквами в скобках ( или
).
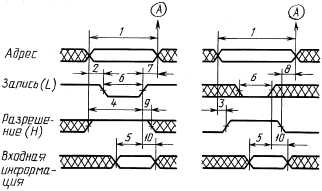
Цикл записи
| вход: безразлично; |
Типовые временные диаграммы:
1 - время цикла записи; 2 - время установления сигнала адреса до сигнала записи; 3 - время установления сигнала адреса до сигнала разрешения; 4 - время установления сигнала разрешения до окончания сигнала записи; 5 - время установления информации на входе до окончания сигнала записи; 6 - длительность импульса записи; 7 - время удержания сигнала адреса после сигнала записи; 8 - время удержания сигнала адреса после сигнала разрешения; 9 - время удержания сигнала разрешения после сигнала записи; 10 - время удержания информации на входе после сигнала записи
Черт.15
Точка соответствует самому раннему моменту, в который может начаться следующий цикл.
Активные уровни на входах записи и разрешения обозначены буквами в скобках ( или
).
Цикл считывание-запись
| вход: безразлично; |
Типовые временные диаграммы:
1 - время цикла считывание-запись; 2 - время выборки адреса; 3 - время выборки считывания; 4 - время выборки разрешения; 5 - время установления сигнала адреса до сигнала считывания; 6 - время установления сигнала считывания до сигнала разрешения; 7 - время установления сигнала адреса до сигнала разрешения; 8 - время установления информации на входе до окончания сигнала записи; 9 - длительность импульса записи; 10 - время сохранения информации на выходе после сигнала считывания; 11 - время удержания сигнала адреса после сигнала записи; 12 - время удержания сигнала запрещения после сигнала записи; 13 - время удержания информации на входе после сигнала записи
Черт.16
Точка соответствует самому раннему моменту, в который может начаться следующий цикл.
Активные уровни на входах считывания-записи и разрешения обозначены буквами в скобках ( или
).
Цикл запись-считывание
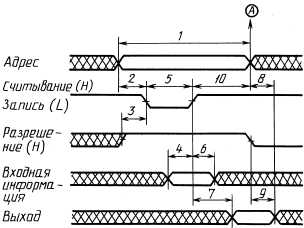
| вход: безразлично; |
Типовые временные диаграммы:
1 - время цикла запись-считывание; 2 - время установления сигнала адреса до сигнала записи; 3 - время установления сигнала разрешения до сигнала записи; 4 - время установления информации на входе до окончания сигнала записи; 5 - длительность импульса считывания; 6 - время удержания информации на входе после сигнала записи; 7 - время восстановления сигнала считывания; 8 - время сохранения информации на выходе после сигнала адреса; 9 - время сохранения информации на выходе после сигнала разрешения; 10 - время восстановления сигнала записи
Черт.17
Точка соответствует самому раннему моменту, в который может начаться следующий цикл.
Активные уровни на входах считывания-записи и разрешения обозначены буквами в скобках ( или
).
4. Терминология для микропроцессорных интегральных схем
4.1. Микропроцессорная интегральная схема
Интегральная схема, обладающая способностью:
- осуществлять выполнение кодированных команд;
- выполнять в соответствии с командами следующие операции:
а) принимать кодированные данные для обработки и/или хранения;
b) осуществлять арифметические и логические операции с входными данными, а также с любыми соответствующими данными, хранящимися во внутренних регистрах микропроцессорной интегральной схемы и/или во внешних устройствах памяти;
c) выдавать кодированные данные;
принимать и/или выдавать сигналы, управляющие и/или отражающие работу или состояние микропроцессорной интегральной схемы.
Примечание. Команды могут вводиться, быть встроены или храниться во внутренней памяти.
5. Терминология для приборов с переносом заряда
5.1. Наименование приборов
5.1.1. Прибор с переносом заряда (ППЗ)
Прибор, работа которого зависит от эффективного движения дискретных зарядовых пакетов на поверхности или внутри полупроводника, или через соединения на поверхности полупроводника.
Примечание. Эффективное движение может осуществляться путем изменения области, в которой создается управляющее электрическое поле.
5.1.2. Прибор типа "пожарная цепочка" (ППЦ)
Прибор с переносом заряда, в котором заряд накапливается в дискретных областях в полупроводнике и переносится в виде пакета посредством ряда переключающих приборов, которые соединяют эти области.
Примечания:
1. Этому термину и его сокращению может предшествовать слово "биполярный", обозначающее полевой транзистор на основе -перехода, МОП, SOS и т.д. в зависимости от технологии изготовления переключающих приборов.
2. Этот прибор работает на основе восстановления пакета заряда, на каждой позиции, формируемой внутренней емкостью.
5.1.3. Прибор с зарядовой связью (ПЗС)
Прибор с переносом заряда, в котором заряд накапливается в потенциальных ямах и переносится почти полностью в виде пакета путем перемещения потенциальных ям.
Примечание. Этот прибор работает благодаря изменению положения одного и того же зарядового пакета.
5.1.4. Фоточувствительный прибор с переносом заряда
Прибор с переносом заряда, в котором изображение преобразуется в зарядовые пакеты, которые могут передаваться как электрическое представление изображения.
5.2. Общие термины
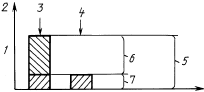
5.2.1а. Заряд смещения (для аналоговых сигналов)
Заряд, который определяет нулевой уровень в случае аналогового сигнала и вводится во все потенциальные ямы (см. черт.18а и 18b).
Диаграмма, иллюстрирующая наличие или отсутствие зарядов
|
|
|
|
|
|
1 - аналоговый сигнал; 2 - заряд; 3 - наличие сигнала; 4 - отсутствие сигнала; 5 - диапазон заряда сигнала; 6 - заряд смещения | 1 - аналоговый сигнал при излучении; 2 - заряд; 3 - наличие сигнала; 4 - отсутствие сигнала; 5 - заряд сигнала; 6 - заряд смещения (фоновый заряд) | 1 - цифровой сигнал; 2 - заряд; 3 - сигнал высокого уровня; 4 - сигнал низкого уровня; 5 - общий заряд; 6 - заряд сигнала; 7-заряд низкого уровня |
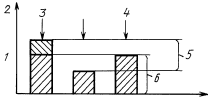
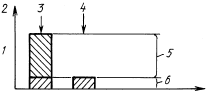
Черт.18
Примечания:
1. В фоточувствительных приборах иногда употребляется термин "фоновый заряд".
2. Обычно заряд вводится электрическим путем или путем излучения.
5.2.1b. Заряд низкого уровня (для цифровых сигналов)
Заряд, который определяет низкий уровень цифрового сигнала и вводится во все потенциальные ямы (см. черт.18с)
Примечания:
1. Использование термина "жирный нуль" не рекомендуется.
2. Заряд обычно вводится электрическим путем или путем излучения.
5.2.2. Пустой нуль, реальный нуль
Состояние, при котором отсутствует заряд смещения или имеется заряд низкого уровня.
5.2.3. Заряд сигнала
Количество электрического заряда, представляющее сигнал (см. черт.18).
5.2.4. Общий заряд
Общий электрический заряд, накопленный в потенциальной яме (или дискретной области прибора типа "пожарной цепочки") (см. черт.18).
5.2.5. Зарядовый пакет
Часть общего заряда, которая переносится из одной позиции в следующую.
5.2.6. Потери при переносе заряда
Частичная потеря заряда сигнала, который пополняет остаточный заряд во всех поверхностных состояниях или ловушках внутри полупроводника, которые освободились с момента последнего прохождения заряда через прибор при переносе зарядового пакета из одной области накопления в другую, после того как остаточные заряды уменьшаются до 0.
5.2.7. Затвор переноса
Электрод, к которому приложено напряжение с целью переноса заряда и который изолирован от полупроводника изолирующей поверхностью или переходом.
5.2.8. Затвор накопления
Электрод, к которому приложено напряжение с целью накопления заряда и который изолирован от полупроводника изолирующей поверхностью или переходом.
5.2.9. Перекрывающий затвор
Тип затвора переноса, в котором соседние электроды перекрываются и изолируются друг от друга.
5.2.10. Плавающий затвор
Электрод, который не имеет омических соединений и изолирован от проводника изолирующей поверхностью или переходом.
Примечания:
1. Потенциал плавающего затвора зависит от количества электрического заряда, накопленного в потенциальной яме под поверхностью полупроводника.
2. Плавающий затвор обычно используется в схемах детектирования или регенерации сигнала. В принципе, плавающий затвор может быть также изолированным диффузионным переходом, переходом с барьером Шоттки и т.д.
5.2.11. Плавающая область
Обогащенная область высокой проводимости, но без омического соединения, из которой зарядовые пакеты переносятся с помощью перекрывающихся или соседних затворов переноса.
Примечание. Плавающая область может быть использована в качестве узла считывания для заряда сигнала в схемах детектирования или регенерации сигнала.
5.2.12. Стадия регенерации заряда (цифровой схемы)
Область прибора с переносом заряда, используемая для обновления накопленной цифровой информации.
5.2.13. Потенциальная яма (прибора с зарядовой связью)
Минимум потенциальной энергии, которая образуется в полупроводниковом материале прибора с зарядовой связью под воздействием напряжения, приложенного к затвору переноса, и который собирает любые существующие подвижные заряды.
5.2.14. Емкость перемещения заряда, общая емкость ямы
Максимальное количество заряда, которое может быть накоплено в потенциальной яме и перенесено без превышения емкости в соседние ямы.
5.2.15. Канал переноса
Зона в приборе с переносом заряда, внутри которой поток заряда ограничен.
5.2.16. Поверхностный канал
Канал переноса на границе между полупроводником и диэлектриком.
5.2.17. Скрытый канал
Канал переноса под поверхностью полупроводника.
5.3. Термины, относящиеся к параметрам
5.3.1. Коэффициент полезного действия переноса заряда
Процент заряда сигнала, который переносится из одной области накопления в следующую.
5.3.2. Полный коэффициент полезного действия переноса заряда (полный коэффициент полезного действия переноса сигнала)
Процент заряда входного сигнала, который переносится на выход в виде пакета.
5.3.3. Средний коэффициент полезного действия переноса заряда
Корень -й степени из полного коэффициента полезного действия переноса заряда, где
- число переносов.
5.3.4. Сигнал насыщения (для аналогового сигнала)
Максимальный входной сигнал или максимальная сила света, которые могут быть перенесены с заданной степенью линейности между входным и выходным сигналами.
5.3.5а. Входной сигнал насыщения (для цифрового сигнала)
Входной сигнал или сила света, необходимые для заполнения ямы.
5.3.5b. Выходной сигнал насыщения (для цифрового сигнала)
Выходной сигнал, поступающий из ямы.
5.3.6. Эквивалентный сигнал шума
Среднеквадратичное значение входного сигнала или сила света, необходимая для увеличения выходного сигнала вдвое по сравнению со значением, полученным при отсутствии входного сигнала или облучения.
5.3.7. Динамический диапазон
Диапазон полезной работы при линейной зависимости, выраженный как отношение сигнала насыщения к эквивалентному сигналу шума.
5.3.8. Средняя плотность тока утечки ()
Средний ток утечки на единице поверхности внутри активной области прибора.
Примечание. В зависимости от типа прибора активная область может определяться либо как область канала переноса, либо как общая область, включающая области канала. Используют другие названия: "средняя плотность темнового тока" и "средняя плотность тока термогенерации".
5.3.9. Пик тока утечки
Изменение тока утечки, которое превышает заданный уровень сверх его среднего значения.
5.3.10. Время переноса заряда
Время, необходимое для переноса определенной части зарядового пакета из одной области накопления в следующую.
5.3.11. Диапазон задержки сигнала (для линий задержки)
Очевидно из наименования.
6. Буквенные обозначения для комбинаторных и последовательностных схем
а) См. МЭК 747-1, гл.I, и ГОСТ 29106 (МЭК 748-1, гл.V).
b) См. также п.7 настоящего стандарта.
7. Буквенные обозначения для динамических параметров последовательностных интегральных схем, в т.ч. для запоминающих устройств
7.1. Введение
Введением в систему буквенных обозначений, представленную в данном документе, могут служить приводимые ниже принципы, которых следует придерживаться при выработке системы буквенных обозначений для представления динамических параметров запоминающих устройств и прочих последовательностных схем.
а) Принятая система должна дать возможность представить динамические параметры любой схемы запоминающего устройства независимо от степени ее сложности. Она также должна быть применима к любой другой сложной цифровой схеме. Не рекомендуется, например, использовать различные системы буквенных обозначений для запоминающих устройств и микропроцессоров.
b) Изложенное выше требование, как правило, приводит к появлению довольно длинных и неудобных в использовании обозначений динамических параметров. Поэтому целесообразно предусмотреть возможность упрощения обозначений в тех случаях, когда это не вызывает неправильного их толкования, что привело бы к совпадению легко понимаемых мнемонических обозначений.
c) При выборе для индексов прописных или строчных букв почти невозможно составить набор индексов, которые не требовали бы пояснений и соответствовали бы практике, принятой ранее в МЭК. Принят принцип представления буквенных обозначений, не требующих пояснений, так как проблема отбора буквенных обозначений, применимых как к существующим, так и к разрабатываемым последовательностным схемам настолько сложна, что целесообразнее руководствоваться соображениями логики.
d) В сопроводительных документах рекомендуется использовать строчные буквы и индексы, приведенные в этом разделе. Однако обозначения параметров часто наносятся с помощью оборудования, которое не может печатать ни строчные буквы, ни индексы. Необходимо избегать неправильного толкования выполненных таким образом обозначений.
7.2. Буквенные обозначения
Система буквенных обозначений, приводимая в данном пункте, делает возможным создание обозначений для динамических параметров сложных последовательностных схем, включая запоминающие устройства. Она позволяет также сокращать эти обозначения до простых мнемонических обозначений в тех случаях, когда это не приводит к неправильному толкованию.
7.2.1. Общая форма
Для обозначения динамических параметров используют общее обозначение.
![]() , (1)
, (1)
где индекс указывает тип представленного динамического параметра, например: время цикла, время установления, время разрешения и т.д.;
индекс указывает наименование сигнала или вывода, изменение состояния или уровня (или установление состояния или уровня) на котором считается первым сигналом, поданным в начале временного интервала. Если в действительности этот сигнал подается последним, т.е. появляется в конце временного интервала, значение временного интервала считается отрицательным;
индекс указывает направление перехода и/или конечное состояние или уровень сигнала, обозначенного индексом
. При использовании двух букв указывают также начальное состояние или уровень сигнала;
индекс указывает наименование сигнала или вывода, изменение состояния или уровня (или установление состояния или уровня) на котором считается последним сигналом, т.е. появляющимся в конце временного интервала. Если в действительности этот сигнал подается первым, т.е. в начале временного интервала, значение данного временного интервала считают отрицательным;
индекс указывает направление перехода и/или конечное состояние или уровень сигнала, обозначенного индексом
. При использовании двух букв указывает также начальное состояние или уровень сигнала;
индекс указывает дополнительную информацию, такую, как режим работы, условия испытаний и т.п.
Примечани
я:
1. Индексы ![]() могут содержать одну или несколько букв каждый.
могут содержать одну или несколько букв каждый.
2. Индексы и
не используют для времени перехода.
3. Тире в приведенном выше обозначении (1) означает "к", т.е. обозначение означает интервал времени между появлением сигналов и
. Важно отметить, что все сказанное относится и ко всем динамическим параметрам, включая время сохранения. Тире может быть опущено, если это не приводит к неправильному толкованию.
7.2.2. Сокращенные формы
Приведенное выше общее обозначение можно сократить, если это не приводит к неправильному пониманию, например:
![]()
или ,
или - часто используют для обозначения времени удержания;
или - в данном случае скобки не используют;
или ![]() - часто используют для обозначения длительности импульса;
- часто используют для обозначения длительности импульса;
или ,
или ![]() - часто используют для дополнительных временных интервалов.
- часто используют для дополнительных временных интервалов.
7.2.3. Образование подстрочных индексов
При образовании индексов наиболее употребительные составляют из одной буквы (если это возможно), а наименее употребительные - из нескольких, не больше трех, букв. Насколько возможно, используется мнемоническая форма обозначения. Могут быть использованы более длинные буквенные обозначения для обозначения специальных сигналов или выводов специального назначения, если это способствует лучшему пониманию.
7.3. Индекс - тип динамического параметра
Индекс указывает тип динамического параметра, который должен быть отмечен буквенным обозначением. Параметры могут быть разделены на два класса:
a) параметры, характеризующие временные условия прибора;
b) параметры, представляющие собой характеристики прибора.
Буквенные обозначения, предлагаемые для запоминающих устройств, приведены в пп.7.3.1 и 7.3.2.
Все буквы индекса должны быть строчными.
7.3.1. Временные параметры
Следующие буквенные обозначения используют для обозначения временных параметров полупроводниковых запоминающих устройств:
- время цикла,
- интервал между двумя сигналами,
- время спада,
- время удержания,
- время предзаряда,
- время нарастания,
- время восстановления,
- время регенерации,
- время установления,
- время перехода,
- длительность (ширина) импу
льса.
7.3.2. Динамические характеристики
Следующие буквенные обозначения используют для обозначения динамических характеристик полупроводниковых запоминающих устройств:
- время выборки,
- время запрещения,
- время разрешения,
- время задержки при переключении схемы,
- время восстановления,
- время перехода,
- время сохранения.
Примечание. Время восстановления как характеристика ограничивается временем восстановления сигнала считывания.
7.4. Индексы и
- наименование сигнала или вывода
Ниже приведены буквенные обозначения для наименования сигнала или вывода.
Все буквы индексов и
должны быть прописными.
- адрес,
- синхронизация,
- адрес столбца,
- строб адреса столбца,
- ввод данных,
- ввод/вывод данных,
- разрешение кристалла,
- стирание,
- разрешение по выходу,
- программа,
- вывод данных,
- считывание,
- адрес строки,
- строб адреса строки,
- регенерация,
- считывание-запись,
- выбор кристалла,
- запись (разрешение записи).
Примечания:
1. В буквенных обозначениях временных интервалов черту над индексом, например , не проставляют.
2. При выборе других буквенных обозначений следует иметь в виду, что индексы не должны оканчиваться буквами ,
,
,
или
(см. п.7.5).
3. Если один и тот же вывод или сигнал может быть использован для двух функций (например, ввод-вывод данных, считывание-запись), форма волны должна быть обозначена с указанием обеих функций, при необходимости, то буквенные обозначения динамических параметров должны включать только ту часть индекса, которая относится к данному параметру (см., например использование и
в п.7.7).
7.5. Индексы и
- переход сигнала
Следующие буквенные обозначения используют для обозначения уровня или состояния сигнала:
- высокий уровень,
- низкий уровень,
- действительный стабильный уровень (высокий или низкий),
- неизвестный, изменяющийся или не влияющий на состояние уровень,
- состояние высокого полного сопротивления на выходе с тремя состояниями.
Направление перехода обозначают двумя буквами из приведенных ниже: переход происходит из состояния, обозначенного первой буквой, в состояние, обозначенное второй буквой.
В целях сокращения обозначения для индексов и
, как показано ниже, можно опустить первую букву, если это не вызовет неправильного толкования.
Все буквы индексов и
должны быть прописными
Примеры | Индекс | |
полный | сокращенный | |
Переход от высокого уровня к низкому уровню | ||
Переход от низкого уровня к высокому уровню | ||
Переход от неизвестного или изменяющегося состояния к действительному состоянию | ||
Переход от действительного состояния к неизвестному или изменяющемуся состоянию | ||
Переход от действительного состояния к высокому уровню | ||
Переход от действительного состояния к состоянию высокого полного сопротивления | ||
Переход от состояния высокого полного сопротивления к действительному состоянию | ||
Примечание. Поскольку индексы и
могут быть сокращены и индексы
и
могут содержать неопределенное число букв, во избежание недоразумений, которые могли бы возникнуть при сокращении индексов
и
, буквенные обозначения данных индексов не должны оканчиваться буквами
,
,
,
или
.
7.6. Индекс
При необходимости, для представления дополнительной информации, такой как режим работы, условия испытания и т.п., используют индекс . Ниже приведены буквенные обозначения для индекса
.
Индекс должен быть представлен прописными буквами:
- размыкание цепи;
- считывание по страницам;
![]() - запись по страницам;
- запись по страницам;
- считывание;
- регенерация;
![]() - считывание-модификация-запись;
- считывание-модификация-запись;
- считывание-запись;
- за
пись.
7.7. Примеры буквенных обозначений
Введение
Примеры, приведенные ниже, показывают, как можно использовать систему буквенных обозначений динамических параметров последовательных схем. Сокращенные обозначения приведены только в качестве примеров системы и не должны рассматриваться как рекомендации к использованию конкретного сокращенного обозначения для конкретного динамического параметра. Таким же образом диаграммы не следует рассматривать в качестве определений соответствующих уровней для измерения любого конкретного интервала времени.
7.7.1. Примеры сокращения буквенных обозначений
Примеры, приведенные в табл.1, показывают, как могут быть сокращены буквенные обозначения динамических параметров последовательных схем. В табл.1 показаны все возможные степени сокращения обозначений. Можно использовать любую сокращенную форму, но самые короткие буквенные обозначения рекомендуются только в тех случаях, когда это не влечет неправильного толкования. Предпочтительно, чтобы степень упрощения буквенного обозначения соответствовала степени упрощения термина, но это требование не является обязательным.
Примеры сокращения буквенных обозначений
Таблица 1
Термины | Обозначения |
Время установления адреса до сигнала выбора кристалла в режиме считывания |
|
Время установления сигнала адреса до сигнала выбора кристалла |
|
Время выборки адреса |
|
7.7.2. Примеры буквенных обозначений для полупроводниковых запоминающих устройств.
Буквенные обозначения для типового цикла считывания запоминающего устройства

Запоминающее устройство с открытым коллектором на выходе: - неактивное состояние высокого уровня;
- достоверный адрес;
- достоверная информация
Черт.19
Полные обозначения | Обозначения с сокращенными индексами | Типовые формы сокращений | |
Временные параметры | |||
1. Время цикла считывания |
|
| |
5. Время установления сигнала адреса до сигнала считывания |
|
|
|
6. Время установления сигнала считывания до сигнала выбора |
|
|
|
7. Время установления сигнала адреса относительно сигнала выбора |
|
|
|
Характеристики переключения | |||
2. Время выборки адреса |
|
| |
3. Время выборки считывания |
|
| |
4. Время выборки выбора кристалла |
|
| |
8. Время сохранения информации на выходе после сигнала адреса |
|
|
|
9. Время сохранения информации на выходе после (окончания) сигнала считывания |
|
|
|
10. Время запрещения на выходе после (окончания) сигнала выбора |
|
|
|
13. Время перехода сигнала на выходе от высокого уровня к низкому |
|
| |
14. Время перехода сигнала на выходе от низкого уровня к высокому |
|
|
________________
* Индексы и
не используют при обозначении времени перехода, в том числе времени нарастания и спада.
Типовое статическое запоминающее устройство с произвольной выборкой. Цикл считывания | |
|
|
|
|
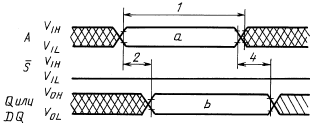
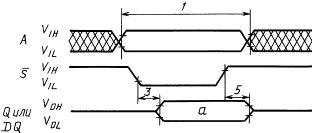
Черт.20
Полные обозначения | Обозначения с сокращенными индексами | Типовые формы сокращений | |
Временные параметры | |||
1. Время цикла считывания |
|
| |
Характеристики переключения | |||
2. Время выборки адреса |
|
|
|
3. Время выборки выбора кристалла |
|
| |
4. Время сохранения информации на выходе после сигнала адреса |
|
|
|
5. Время запрещения на выходе после сигнала выбора |
|
|
|
________________
* Индекс только в том случае, если он несет существенную информацию.
Типовое статическое запоминающее устройство с произвольной выборкой
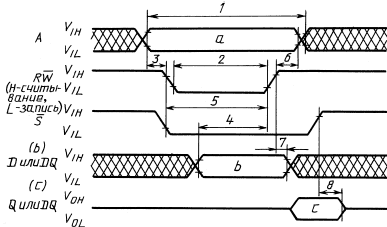
- достоверный адрес;
- достоверная информация на входе;
- достоверная информация на выходе
Черт.21
Полные обозначения | Обозначения с сокращенными индексами | Типовые формы сокращений | |
Временные параметры | |||
1. Время цикла записи |
|
| |
2. Длительность (ширина) импульса записи |
|
|
|
3. Время установления сигнала адреса до сигнала записи |
|
|
|
4. Время установления информации до (окончания) сигнала записи |
|
|
|
5. Время установления сигнала выбора кристалла до (окончания) сигнала записи |
|
|
|
6. Время восстановления сигнала записи или |
|
|
|
время удержания сигнала адреса после сигнала записи |
|
|
|
7. Время удержания информации после сигнала записи |
|
|
|
Характеристики переключения | |||
8. Время запрещения на выходе после сигнала выбора |
|
|
|
________________
* Индекс только в том случае, если он несет существенную информацию.
Динамическое запоминающее устройство с произвольной выборкой.
Общие параметры для цикла считывания, цикла записи и
цикла считывание-запись
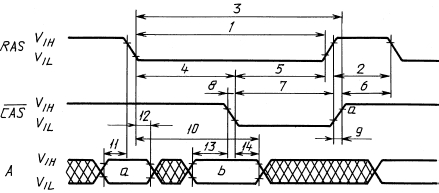
- строка;
- столбец
Черт.22
Полные обозначения | Обозначения с сокращенными индексами | Типовые формы сокращений | |
Временные параметры | |||
1. Длительность (ширина) импульса |
|
|
|
2. Длительность (ширина) импульса |
|
|
|
3. Интервал между низкого уровня и |
|
|
|
4. Интервал между низкого уровня и |
|
|
|
5. Интервал между |
|
|
|
6. Интервал между |
|
|
|
7. Длительность (ширина) импульса |
|
|
|
8. Время спада |
|
|
|
9. Время нарастания |
|
|
|
10. Время удержания сигнала |
|
|
|
11. Время установления сигнала |
|
|
|
12. Время удержания сигнала |
|
|
|
13. Время установления сигнала |
|
|
|
14. Время удержания сигнала низкого уровня |
|
|
|
________________
* Индекс только в том случае, если он несет существенную информацию.
** Индексы и
не используют при обозначении времени перехода, в том числе времени нарастания и спада.
Примечания:
1. - строб адреса строки;
2. - строб адреса столбца;
3. - адрес столбца;
4. - адрес строки (прим. переводчика).
Типовое динамическое запоминающее устройство с произвольной выборкой. Цикл считывания:
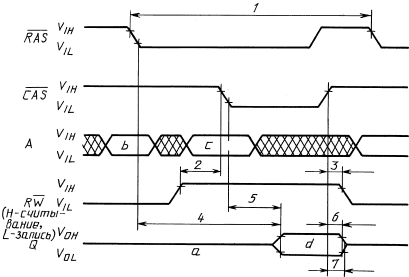
- состояние высокого полного сопротивления;
- строка;
- столбец;
- достоверная информация
Черт.23
Полные обозначения | Обозначения с сокращенными индексами | Типовые формы сокращений | |
Временные параметры | |||
1. Время цикла считывания |
|
| |
2. Время установления сигнала считывания до |
|
|
|
3. Время установления считывания после |
|
|
|
Характеристики переключения | |||
4. Время выборки |
|
|
|
5. Время выборки |
|
|
|
6. Время сохранения информации на выходе после |
|
|
|
7. Время запрещения на выходе после |
|
|
|
________________
* Индекс только в том случае, если он несет существенную информацию.
Типовое динамическое запоминающее устройство с произвольной выборкой. Цикл записи:
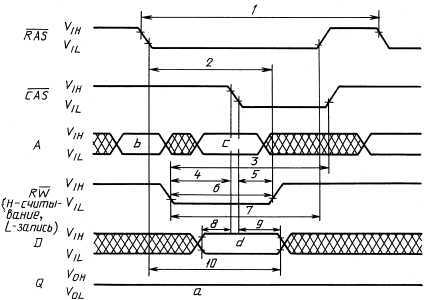
- состояние высокого полного сопротивления;
- строка;
- столбец;
-достоверная информация
Черт.24
Полные обозначения | Обозначения с сокращенными индексами | Типовые формы сокращений | |
Временные параметры | |||
1. Время цикла записи |
|
| |
2. Время удержания сигнала записи после |
|
|
|
3. Время удержания |
|
|
|
4. Время установления сигнала записи до |
|
|
|
5. Время удержания сигнала записи после |
|
|
|
6. Длительность (ширина) импульса записи |
|
|
|
7. Время удержания |
|
|
|
8. Время установления информации на входе до |
|
|
|
9. Время удержания информации на входе после |
|
|
|
10. Время удержания информации на входе после |
|
|
|
________________
* Индекс только в том случае, если он несет существенную информацию.
Типовое динамическое запоминающее устройство с произвольной выборкой. Цикл

- состояние высокого полного сопротивления;
- достоверная информация
Черт.25
Полные обозначения | Обозначения с сокращенными индексами | Типовые формы сокращений | |
Временные параметры | |||
1. Время цикла считывание-запись |
|
|
|
2. Интервал между |
|
|
|
3. Время удержания |
|
|
|
4. Время установления сигнала считывания до |
|
|
|
5. Интервал между |
|
|
|
6. Время удержания |
|
|
|
7. Длительность (ширина) импульса записи |
|
|
|
8. Время установления информации на входе до сигнала записи |
|
|
|
9. Время удержания информации на входе после сигнала записи |
|
|
|
Характеристики переключения | |||
10. Время выборки |
|
|
|
11. Время выборки |
|
|
|
12. Время сохранения информации на выходе после |
|
|
|
13. Время запрещения на выходе после |
|
|
|
________________
* Индекс только в том случае, если он несет существенную информацию.
Глава III. ОСНОВНЫЕ ПРЕДЕЛЬНО ДОПУСТИМЫЕ ЗНАЧЕНИЯ
ПАРАМЕТРОВ И ХАРАКТЕРИСТИКИ
Раздел I. ЦИФРОВЫЕ ИНТЕГРАЛЬНЫЕ СХЕМЫ. ОБЩИЕ ПОЛОЖЕНИЯ
В данном разделе рассматривают комбинаторные и последовательностные цифровые интегральные схемы, являющиеся (если не оговорено иное) биполярными и МОП-схемами. Динамические соединения цифровых интегральных схем в данный раздел не включены.
1. Обозначение и описание схемы
1.1. Обозначение и тип
1.2. Технология
Необходимо указать технологию изготовления схемы, например полупроводниковая монолитная интегральная схема, тонкопленочная интегральная схема, гибридная интегральная схема, микроблок.
Следует также указать особенности полупроводниковой технологии, например МОП--канальная, КМОП, TTL, с эффектом Шоттки либо
.
1.3. Обозначение корпуса
1.3.1. Обозначение МЭК и/или национальное обозначение габаритного чертежа или чертеж нестандартного корпуса, включают в себя нумерацию выводов.
1.3.2. Основной материал корпуса, например керамика, пластмасса, стекло.
1.3.3. Обозначение выводов, номера выводов и выполняемые функции.
2. Функциональное назначение
2.1. Блок-схема
Должна быть приведена блок-схема или эквивалентная информация с цифровой интегральной схемой.
Пример
1 - вход 2;
2 - вход 1;
3 - источник питания; 4 - выход;
5 - цифровая интегральная схема с двумя входами; 6 - вывод
Черт.26
Различают следующие выводы:
а) выводы питания, т.е. выводы, предназначенные для подсоединения к источникам питания;
b) выводы входа и выхода, т.е. выводы, на которые подаются или с которых снимаются сигналы. Под термином "сигнал" подразумевается как импульс, так и более сложная форма сигнала;
c) при необходимости для управления и изменения характеристик схемы могут использоваться другие выводы;
d) неиспользуемые выводы.
На блок-схеме должна быть указана функция каждого внешнего соединения и, если это не приведет к неправильному толкованию, могут быть указаны номера выводов. Если корпус содержит металлические части, то необходимо оговорить любое подсоединение к их внешним элементам. В случае необходимости можно указать подсоединение всех соответствующих внешних электрических элементов.
В качестве дополнительной информации может быть приведена полная электрическая схема, однако указывать значения параметров компонентов схемы необязательно.
2.2. Описание функции
Должна быть оговорена выполняемая схемой функция, например, в форме таблицы состояний.
Пример.
Таблица состояний цифровой интегральной схемы с двумя входами, осуществляющей функцию ![]() (
(![]() ).
).
Вход 1 | Вход 2 | Выход |
Если не оговорено иное, и
относятся к напряжению.
2.3. Сложные структуры
При необходимости для сложных структур, заключенных в один корпус, должны быть указаны возможные внешние межсоединения выводов, внешние элементы, такие, как резисторы нагрузки, а также выполняемая при этом основная функция.
3. Предельно допустимые значения параметров
Согласно пп.3.1-3.4, если приводятся максимальные и/или минимальные значения, изготовитель должен указать, идет речь об абсолютном или алгебраическом значении.
Предельно допустимые значения параметров должны обеспечивать работу интегральной схемы в заданном диапазоне рабочих температур. Если предельно допустимые значения зависят от температуры, такая зависимость должна быть оговорена.
3.1. Напряжения и токи в статическом режиме
3.1.1. Предельно допустимое(ые) значение(я) статического(их) напряжения(ий) на выводе(ах) питания относительно заданной электрической контрольной точки (см. примечание).
3.1.2. При необходимости предельно допустимое значение напряжения между заданными выводами питания (см. примечание).
3.1.3. Если требуется несколько источников питания, должно быть указано, имеет ли значение порядок подключения источников питания, и если да, то какая последовательность должна быть указана.
3.1.4. Если ток на каком-либо выводе недостаточно ограничен предельно допустимым значением напряжения, то для данного вывода должно быть также указано предельно допустимое значение тока (см. примечание).
3.1.5. В случае необходимости указывают предельно допустимые значения статического режима на выводах входа и/или выхода.
Примечание. Если используется несколько источников питания, может возникнуть необходимость оговорить комбинацию предельно допустимых значений напряжений и токов для этих источников питания.
3.2. Напряжения и токи в переходном режиме
3.2.1. Если значения, приведенные в пп.3.1.1, 3.1.2 и 3.1.4, могут быть превышены в переходном режиме, то допустимые превышения и их длительность должны быть оговорены.
3.2.2. Предельно допустимые значения входных и/или выходных напряжений и токов и, при необходимости, временные ограничения в заданных наиболее неблагоприятных условиях.
3.3. Температура
3.3.1. Минимальное и максимальное рабочие значения температуры окружающей среды или в контрольной точке микросхемы.
3.3.2. Минимальная и максимальная температура хранения.
3.4. Способность схем выдерживать короткое замыкание
В случае необходимости следует указывать максимальную длительность короткого замыкания между каждым выводом выхода и любым выводом питания (или выводом заземления) в заданных наиболее неблагоприятных рабочих условиях.
4. Рекомендуемые рабочие условия (в заданном диапазоне рабочих температур)
4.1. Диапазон напряжения(ий) питания должен задаваться через номинальное значение плюс-минус заданное допустимое отклонение (плюсовой и минусовой допуски могут быть неодинаковыми и должны быть заданы).
Номинальные значения и допустимые отклонения (допуски) должны быть выбраны из значений, приведенных в ГОСТ 29106 (МЭК 748-1, гл.VI, п.6).
4.2. Требования к входному импульсу, уровни напряжения и/или тока, формы волны импульсов и, при необходимости, временные диаграммы входных сигналов.
4.3. В случае необходимости, условия смещения напряжения и/или тока на всех выводах входа в статическом режиме.
4.4. В случае необходимости, условия смещения напряжения и/или тока на всех выводах выхода в статическом режиме.
4.5. В случае необходимости, значения внешних полных сопротивлений, требуемых на выводах входа и выхода.
4.6. Требования к импульсам генератора(ов) тактовых импульсов. При необходимости такие условия должны включать в себя уровни напряжения, форму волны импульсов и временные соотношения импульсов.
5. Статические электрические характеристики биполярных интегральных схем
Каждая электрическая характеристика, приведенная в п.5, должна быть задана при определенных наиболее неблагоприятных электрических условиях с учетом рекомендуемого диапазона напряжения(ий) питания, как указано в п.4.1, и:
а) в заданном диапазоне рабочих температур или
b) при температуре 25 °С и при максимальном и минимальном значениях рабочей температуры.
5.1. Основные характеристики напряжения цифровых сигналов
Характеристики напряжения цифровых сигналов представлены четырьмя диапазонами. Таким образом, необходимо указывать восемь значений напряжений.
Для каждого состояния регулируемого напряжения определяют два диапазона: гарантированный диапазон на выходе и допустимый диапазон на входе. Всякое поданное на входы напряжение в пределах допустимого диапазона вызывает на выходе напряжение в пределах гарантированного диапазона, которое соответствует результирующему состоянию, указанному в таблице состояний. Необходимо, таким образом, указывать следующие характеристики напряжения:
- наиболее положительное (наименее отрицательное) значение гарантированного диапазона напряжения высокого уровня на выходе.
Примечание. На практике во многих случаях с целью упрощения можно принять равным наиболее положительному значению наиболее положительного напряжения питания (или нулю, если используется только отрицательное напряжение питания). Под этим условием подразумевается, что значение
не оговаривается;
- наименее положительное (наиболее отрицательное) значение гарантированного диапазона напряжения высокого уровня на выходе;
- наиболее положительное (наименее отрицательное) значение гарантированного диапазона напряжения низкого уровня на выходе;
- наименее положительное (наиболее отрицательное) значение гарантированного диапазона напряжения низкого уровня на выходе.
Примечание. На практике во многих случаях с целью упрощения можно принять равным наиболее отрицательному значению наиболее отрицательного напряжения питания (или нулю, если используют только положительные напряжения питания). Под этим условием подразумевают, что значение
не оговаривают;
- наиболее положительное (наименее отрицательное) значение допустимого диапазона напряжения высокого уровня на входе.
Примечание. Если не оговаривают, то предполагают, что
![]() ;
;
- наименее положительное (наиболее отрицательное) значение допустимого диапазона напряжения высокого уровня на входе;
- наиболее положительное (наименее отрицательное) значение допустимого диапазона напряжения низкого уровня на входе;
- наименее положительное (наиболее отрицательное) значение допустимого диапазона напряжения низкого уровня на входе.
Примечание. Если не оговаривают, то предполагают, чт
о ![]() .
.
5.1.1. Основные характеристики схем с гистерезисом на входах (например, триггер Шмитта)
,
- пороговое (входное) напряжение при положительном переходе;
![]() ,
, - наиболее положительное (наименее отрицательное) значение гарантированного диапазона порогового (входного) напряжения при положительном переходе;
,
- наименее положительное (наиболее отрицательное) значение гарантированного диапазона порогового (входного) напряжения при положительном переходе;
,
- пороговое (входное) напряжение при отрицательном переходе;
,
![]() - наиболее положительное (наименее отрицательное) значение гарантированного порогового (входного) напряжения при отрицательном переходе;
- наиболее положительное (наименее отрицательное) значение гарантированного порогового (входного) напряжения при отрицательном переходе;
,
![]() - наименее положительное (наиболее отрицательное) значение гарантированного диапазона порогового (входного) напряжения при отрицательном переходе.
- наименее положительное (наиболее отрицательное) значение гарантированного диапазона порогового (входного) напряжения при отрицательном переходе.
Примечание. Термин "гистерезис", что используемый в таблице параметров, означает разность пороговых (входных) напряжений при положительном и отрицательном переходах
![]()
или
![]() .
.
5.2. Входное фиксирующее напряжение (при необходимости)
Максимальное значение входного фиксирующего напряжения при заданном значении входного тока.
Примечание. Эту характеристику следует оговаривать для схем, имеющих на одном или нескольких входах ограничивающие диоды, например схема с фиксацией на входе.
5.3. Основные характеристики входных и выходных токов
5.3.1. Основные характеристики для всех цифровых интегральных схем
В зависимости от типа схемы каждому из четырех выходных напряжений соответствует способность схемы подавать или потреблять ток.
Поэтому для каждого из четырех выходных напряжений необходимо оговорить предельные значения соответствующих токов. При предположении, что подаваемый на вывод ток является положительным, а снимаемый с вывода - отрицательным должны быть оговорены следующие токи:
при
- наименование* положительное (наиболее отрицательное) значение выходного тока, когда к рассматриваемому выходу приложено напряжение
, а ко входам приложены напряжения, соответствующие наихудшему случаю в пределах соответствующего диапазона
![]() и/или
и/или ![]() . Эти напряжения соответствуют таким состояниям на выходе, которые на выходе вызывают состояние высокого уровня, как указано в таблице состояний.
. Эти напряжения соответствуют таким состояниям на выходе, которые на выходе вызывают состояние высокого уровня, как указано в таблице состояний.
_______________
* Текст соответствует оригиналу. - .
Примечание. Это значение не является обязательным, если равно наиболее положительному значению наиболее положительного напряжения питания;
при
- наиболее положительное (наименее отрицательное) значение выходного тока, когда к рассматриваемому выходу приложено напряжение
, а ко входам приложены напряжения, соответствующие наихудшему случаю в пределах соответствующего диапазона
![]() и/или
и/или ![]() . Эти напряжения соответствуют таким состояниям на выходе, которые на выходе вызывают состояния высокого уровня, как указано в таблице состояний;
. Эти напряжения соответствуют таким состояниям на выходе, которые на выходе вызывают состояния высокого уровня, как указано в таблице состояний;
при
- наименее положительное (наиболее отрицательное) значение выходного тока, когда к рассматриваемому выходу приложено напряжение
, а ко входам приложены напряжения, соответствующие наихудшему случаю в пределах соответствующего диапазона
![]() и/или
и/или ![]() . Эти напряжения соответствуют таким состояниям на входе, которые на выходе вызывают состояние низкого уровня, как указано в таблице состояний;
. Эти напряжения соответствуют таким состояниям на входе, которые на выходе вызывают состояние низкого уровня, как указано в таблице состояний;
при
- наиболее положительное (наименее отрицательное) значение выходного тока, когда к рассматриваемому выходу приложено напряжение
, а ко входам приложено напряжение, соответствующее наихудшему случаю в пределах соответствующего диапазона
![]() и/или
и/или ![]() . Эти напряжения соответствуют таким состояниям на входе, которые на выходе вызывают состояние низкого уровня, как указано в таблице состояний.
. Эти напряжения соответствуют таким состояниям на входе, которые на выходе вызывают состояние низкого уровня, как указано в таблице состояний.
Примечание. Это значение не является обязательным, если равно наиболее отрицательному значению наиболее отрицательного напряжения питания.
Подобным образом, если ко входам схемы приложить любое из четырех напряжений, входы схемы будут потреблять или отдавать определенный ток. Должны быть оговорены следующие предельно допустимые значения входного тока:
при
- наименее положительное (наиболее отрицательное) значение входного тока, когда к рассматриваемому входу приложено напряжение
, а к остальным входам приложены напряжения, соответствующие наихудшему случаю в пределах соответствующего диапазона
![]() и/или
и/или ![]() .
.
Примечание. Эта характеристика необязательна для всех случаев (например когда равно наиболее положительному значению наиболее положительного напряжения питания или для ЭСЛ-схем).
при
- наиболее положительное (наименее отрицательное) значение входного тока, когда к рассматриваемому входу приложено заданное напряжение, соответствующее наихудшему случаю в диапазоне
![]() , а к остальным входам приложены напряжения, соответствующие наихудшему случаю, в пределах соответствующего диапазона
, а к остальным входам приложены напряжения, соответствующие наихудшему случаю, в пределах соответствующего диапазона ![]() и/или
и/или ![]() .
.
Примечание. Напряжение, соответствующее наихудшему случаю, - это такое напряжение в пределах допустимого диапазона, при котором входной ток возрастает до максимального значения;
при
- наименее положительное (наиболее отрицательное) значение входного тока, когда к рассматриваемому входу приложено напряжение, соответствующее наихудшему случаю в диапазоне
![]() , а к остальным входам приложены напряжения, соответствующие наихудшему случаю в пределах соответствующего диапазона
, а к остальным входам приложены напряжения, соответствующие наихудшему случаю в пределах соответствующего диапазона ![]() и/или
и/или ![]() .
.
Примечание. Напряжение, соответствующее наихудшему случаю, - это такое напряжение в пределах допустимого диапазона, при котором входной ток возрастает до максимального значения;
при
- наиболее положительное (наименее отрицательное) значение входного тока, когда к рассматриваемому входу приложено напряжение
, a к остальным входам приложено напряжение, соответствующее наихудшему случаю в пределах соответствующего диапазона
![]() и/или
и/или ![]() .
.
Примечание. Эта характеристика необязательна для всех случаев (например, когда значение равно наиболее отрицательному значению наиболее отрицательного напряжения питания или для ЭСЛ-схем).
В общем случае, как для выводов выхода, так и для выводов входа следует задавать четыре точки на вольт-амперной характеристике (например, см. черт.27 и 28). Положение этих точек может быть определено одним из трех указанных ниже способов:
а) путем подачи заданного эталонного тока и измерения результирующего напряжения;
b) путем приложения заданного эталонного напряжения и измерения результирующего тока.
Примечание. На черт.27 и 28 оси координат необязательно соответствуют нулевому значению напряжения или тока;
c) путем подачи заданного эталонного напряжения через оговоренный резистор нагрузки и измерения напряжения или тока на выводе выхода.
Примечание. Способ с) применим лишь в том случае, когда схема рассчитана на работу с определенной нагрузкой.
Зависимость выходных токов от выходных напряжений

Черт.27
Зависимость входных токов от входных напряжений
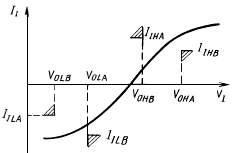
Черт.28
5.3.2. Дополнительные характеристики для цифровых интегральных схем с тремя состояниями на выходах.
На рассмотрении.
5.4. Наиболее неблагоприятные условия
Предельные значения входных и выходных характеристик должны быть гарантированы для наиболее неблагоприятных электрических условий:
a) в заданном диапазоне рабочих температур или
b) при температуре 25 °С и при максимальном и минимальном значениях рабочей температуры.
С этой целью следует указывать значения в указанных заданных точках в наиболее неблагоприятных условиях. Наиболее неблагоприятные условия для каждой точки, в основном, различны. Факторами, которые могут изменяться независимо, каждый в заданном диапазоне, и определять наиболее неблагоприятные электрические условия, являются:
а) напряжения питания в заданном рекомендуемом диапазоне;
b) условия, созданные на выводе входа, отличные от тех условий, которые непосредственно касаются измерений, а именно: напряжение, выбранное из соответствующего диапазона ![]() и/или
и/или ![]() .
.
6. Статические и квазистатические электрические характеристики МОП-интегральных схем
Каждая характеристика, приведенная в п.6, должна быть указана для заданных наиболее неблагоприятных электрических условий в рекомендуемом диапазоне напряжения(ий) питания, как указано в подпункте 4.1, а также:
а) в заданном диапазоне рабочих температур или
b) при температуре 25 °С и максимальном и минимальном значениях рабочей температуры.
6.1. Основные характеристики напряжения цифровых сигналов
Характеристики напряжения цифровых сигналов представлены четырьмя диапазонами, для каждого из них задается два предельно допустимых значения. Таким образом, необходимо указывать восемь значений напряжений.
Для каждого состояния регулируемого напряжения определяют два диапазона: гарантированный диапазон на выходе и допустимый диапазон на входе. Всякое поданное на входы напряжение в пределах допустимого диапазона вызывает на выходе напряжение в пределах гарантированного диапазона, которое соответствует результирующему состоянию, указанному в таблице состояний. Необходимо, таким образом, указывать следующие характеристики напряжения:
- наиболее положительное (наименее отрицательное) значение гарантированного диапазона напряжения высокого уровня на выходе.
Примечание. На практике во многих случаях с целью упрощения можно принять равным наиболее положительному значению наиболее положительного напряжения питания (или нулю, если используются только отрицательные напряжения питания). Под этим условием подразумевается, что значение
не оговаривается;
- наименее положительное (наиболее отрицательное) значение гарантированного диапазона напряжения высокого уровня на выходе;
- наиболее положительное (наименее отрицательное) значение гарантированного диапазона напряжения низкого уровня на выходе;
- наименее положительное (наиболее отрицательное) значение гарантированного диапазона напряжения низкого уровня на выходе.
Примечание. На практике во многих случаях с целью упрощения можно принять равным наиболее отрицательному значению наиболее отрицательного напряжения питания (или нулю, если используют только отрицательные* напряжения питания). Под этим условием подразумевают, что значение
не оговаривают;
________________
* Текст соответствует оригиналу. - .
- наиболее положительное (наименее отрицательное) значение допустимого диапазона напряжения высокого уровня на выходе.
Примечание. Если оговаривают, предполагают, что
![]() ;
;
- наименее положительное (наиболее отрицательное) значение допустимого диапазона напряжения высокого уровня на входе;
- наиболее положительное (наименее отрицательное) значение допустимого диапазона напряжения низкого уровня на входе;
- наименее положительное (наиболее отрицательное) значение допустимого диапазона напряжения низкого уровня на входе.
Примечание. Если не оговаривают, то предполагают, что
![]() .
.
6.2. Основные характеристики токов
6.2.1. Статический входной ток
Максимальное значение в заданном статическом режиме.
6.2.2 Выходные токи
Токи на выходе, которые следует указывать, соответствуют токам, получаемым в результате подачи одного из напряжений ,
,
,
на вывод, на котором измеряют ток.
Таким образом, должны указываться следующие токи: при
,
при
,
при
,
при .
6.2.3. Ток утечки на выходе (при необходимости)
Максимальное значение при заданных условиях.
7. Динамические электрические характеристики
Каждая электрическая характеристика, приведенная в п.7.2, должна быть указана в заданных наиболее неблагоприятных электрических условиях в рекомендуемом диапазоне напряжений питания, как указано в п.4.1.
Предельно допустимые значения или, если они не согласованы между изготовителем и потребителем, типовые значения следует указывать:
а) в заданном диапазоне рабочих температур (например, в виде кривой) или
b) при температуре 25 °С и максимальном и минимальном значениях рабочей температуры.
Условие b) следует использовать только в том случае, если значение характеристики для наиболее неблагоприятных условий во всем диапазоне температуры может быть выведено из значений, указанных при заданных значениях температуры.
Во всех случаях предельно допустимые значения следует указывать при температуре 25 °С.
7.1. Введение
Время переключения цифровых интегральных схем характеризуется временем задержки при переключении и временем перехода. Время задержки при переключении следует указывать в любом случае, необходимость указания времени перехода зависит от значения времени перехода относительно:
а) времени задержки при переключении и
b) произвольно низкого значения, например 10 нc (см. п.7.2.2).
Такое переключение предназначено для обеспечения информации о работе интегральной схемы в типовых системах. Однако для точности измерения и унификации ТУ следует использовать методы измерений, для которых указаны характеристики управляющего импульса и нагрузки, включающие пассивные элементы схемы.
Характеристики переключения, приведенные в п.7.2, и временные требования, приведенные в п.7.3, даются в общих чертах, для последовательностных схем может потребоваться более одного значения времени (например, для различных линий распространения). Кроме того, может возникнуть необходимость для какой-либо отдельной схемы указать более одного значения одного и того же времени относительно различных заданных уровней напряжения.
Уровни напряжения, используемые для определения времени переключения, приведены в п.5.1.
7.2. Временные характеристики быстродействия схемы
7.2.1. Время задержки при переключении
Должно быть указано время задержки переключения в заданных условиях (см. примечание 1 п.7.2.2):
a) - время задержки при переключении выхода в состояние низкого уровня, максимальное и минимальное значения;
b) - время задержки при переключении выхода в состояние высокого уровня, максимальное и минимальное значения.
При наличии нескольких различных логических информационных каналов временные характеристики должны быть заданы для каждого в отдельности.
Следующая информация должна быть приведена в виде типовых значений:
- зависимость времени задержки при переключении от тока нагрузки или, при необходимости, от сопротивления нагрузки;
- зависимость времени задержки при переключении от емкости нагрузки при заданном токе нагрузки или, при необходимости, при заданном сопротивлении нагрузки.
7.2.2. Время перехода
Время перехода следует указывать в заданных условиях (см. примечание 1):
a) если типовое значение времени перехода сравнимо (см. примечание 2) или превышает значение времени задержки переключения, указывают максимальное значение времени перехода;
b) если типовое значение времени перехода составляет менее 10 нc, указывают минимальное значение (см. примечание 3).
Если выполняются оба эти условия, то указывают максимальное и минимальное значения. Если не выполняется ни одно из этих условий, то указывать значение времени перехода нет необходимости.
В случае необходимости время перехода указывают для обоих направлений перехода (т.е. следует указать и
).
Примечания:
1. Заданные условия измерения должны включать в себя характеристики генератора импульсов и осциллографа (или другого соответствующего измерительного прибора), а также конфигурацию и значение компонентов цепи нагрузки на выходе.
2. Время перехода считают сравнимым со временем задержки переключения, если его значение на 50% превышает значение времени задержки переключения.
3. При очень малых значениях времени перехода может возникнуть явление выброса, а также проблемы, связанные с использованием реальных нагрузок.
Зависимость времени перехода от емкости нагрузки должна быть приведена в виде типовых значений.
7.3. Требования на входах для обеспечения правильной последовательности работы схемы
Правильная последовательность работы схемы может заключаться в следующем:
- в изменении состояния на одном или нескольких выходах, или
- в сохранении на всех выходах предшествующего состояния, и/или
- в изменении состояния готовности схемы.
7.3.1. Временные характеристики граничной формы сигнала, поданного на вывод (на других входах сохраняются постоянные уровни)
a) Длительность сигнала высокого уровня (см. черт.31)
Минимальное значение для сигнала с заданными значениями высокого и низкого уровней, подаваемого на заданный вывод входа.
Длительность сигнала низкого уровня должна быть достаточно большой, чтобы уменьшение ее значения не оказывало влияния на полученный результат.
b) Длительность сигнала низкого уровня (см. черт.31)
Минимальное значение для сигнала с заданными значениями высокого и низкого уровней, подаваемого на заданный вывод входа.
Длительность сигнала высокого уровня должна быть достаточно большой, чтобы уменьшение ее значения не оказывало влияния на полученный результат.
c) Длительность сигнала высокого уровня (см. черт.31)
Максимальное значение для сигнала с заданными значениями высокого и низкого уровней, подаваемого на заданный вывод входа.
Длительность сигнала низкого уровня должна быть достаточно большой, чтобы уменьшение ее значения не оказывало влияния на полученный результат.
d) Длительность сигнала низкого уровня (см. черт.31).
Максимальное значение сигнала с заданными значениями высокого и низкого уровней, подаваемого на заданный вывод входа. Длительность сигнала высокого уровня должна быть достаточно большой, чтобы уменьшение ее значения не оказывало влияния на полученный результат.
e) Скорость изменения или время нарастания и/или спада входного сигнала.
Минимальное и максимальное значения для сигнала с заданными значениями высокого и низкого уровней, подаваемого на заданный вывод входа.
7.3.2. Необходимые временные соотношения между двумя входными сигналами
Если изменение состояния входного сигнала обусловлено состояниями других входных сигналов
(где
от 2 до
,
- число входов), то в целях обеспечения правильной последовательности работы схемы необходимо оговорить для каждого входа временные характеристики по перечислениям а) и b).
Примечания:
1. Сигнал - это сигнал, поданный на любой вывод входа, который здесь обозначен цифрой 1.
2. Может возникнуть необходимость в указании нескольких временных интервалов между различными заданными уровнями сигналов и
.
а) Время установления
Минимальное и, при необходимости, максимальное значения.
Примечания:
1. Время установления - это интервал, измеренный относительно заданного уровня сигнала , в течение которого сигнал
присутствует до подачи сигнала
. Его измеряют между заданными уровнями сигналов
и
, как указано на черт.29.
2. Время установления может иметь отрицательное значение.
Время установления 
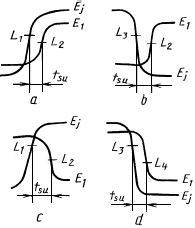
Черт.29
Примечание. Для обозначения уровней используют нейтральные обозначения ![]() .
.
b) Время удержания
Минимальное и, при необходимости, максимальное значения.
Примечания:
1. Время удержания - это интервал, измеренный относительно заданного уровня сигнала , в течение которого сигнал
присутствует после снятия сигнала
. Его измеряют между заданными уровнями сигналов
и
, как указано на черт.30.
2. Время удержания может иметь отрицательное значение.
Время удержания 

Черт.30
Примечание. Для обозначения уровней используют нейтральные обозначения ![]() .
.
7.3.3. Необходимые временные соотношения между двумя последовательными сигналами, поданными на один и тот же вход
а) Время обращения
Минимальное значение.
Примечание. Время обращения - это интервал между окончанием одного входного импульса и началом следующего импульса, поданного на тот же вывод входа; длительность каждого из них определена в п.7.3 (см. черт.31).
Время обращения 
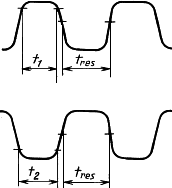
Черт.31
b) Рабочая частота
Минимальное и максимальное значения.
Примечание. Частотой сигнала является частота такого сигнала, который может быть подан на вывод входа при заданном коэффициенте заполнения и заданных (по возможности последовательных) условиях на остальных входах.
7.4. Входное и выходное полные сопротивления
7.4.1. Входная емкость в режиме большого сигнала
Максимальное и/или типовое значение(я) когда напряжение (или ток) входного сигнала переходит из состояния высокого уровня в состояние низкого уровня или наоборот, в следующих заданных условиях:
- нагрузки на выходе и нагрузки на других выводах входа;
- входного импульса (амплитуды, частоты, времени нарастания и спада и т.д.);
- напряжения(ий) питания.
7.4.2. Выходная емкость в режиме большого сигнала (относится только к схемам с высоким выходным полным сопротивлением, к таким как схемы "ИЛИ")
Максимальное и/или типовое значения(е), когда напряжение (или ток) на выводе выхода переходит из состояния высокого уровня в состояние низкого уровня или наоборот, в следующих заданных условиях:
- нагрузки на входе и нагрузки на других выводах выхода;
- входного импульса (амплитуды, частоты, времени нарастания и спада и т.д.);
- напряжения(ий) питания.
7.4.3. Входное сопротивление в режиме большого сигнала (для ненасыщенных схем и в режиме высокого быстродействия)
Минимальное и/или типовое значение(я), когда напряжение (или ток) на выводе входа переходит из состояния высокого уровня в состояние низкого уровня или наоборот, в следующих заданных условиях:
- нагрузки на выходе и нагрузки на других выводах входа;
- входного импульса (амплитуды, частоты, времени нарастания и спада и т.д.);
- напряжения(ий) питания.
7.4.4. Выходное сопротивление в режиме большого сигнала (для ненасыщенных схем и в режиме высокого быстродействия)
Минимальное и/или типовое значение(я), когда напряжение (или ток) на выводе выхода переходит из состояния высокого уровня в состояние низкого уровня или наоборот, в следующих заданных условиях:
- нагрузки на входе и нагрузки на других выводах выхода;
- входного импульса (амплитуды, частоты, времени нарастания и спада и т.д.);
- напряжения(ий) питания.
8. Общая мощность или токи потребления
Типовое и максимальное значения в заданных рабочих условиях.
9. Общий ток потребления (в динамическом режиме)
Графики зависимости типовых значений тока потребления от частоты повторения импульсов при коэффициенте заполнения 50% или типовые значения на двух заданных частотах повторения. График зависимости следует указывать для заданных рекомендуемых рабочих условий.
В случае необходимости эти сведения должны быть также приведены для входов генераторов тактовых импульсов, работающих в качестве источника импульсов.
10. Сведения об управляющих импульсах (при необходимости)
Термин находится на рассмотрении.
11. Сопротивление изоляции
В случае необходимости - минимальное значение при заданном напряжении. Должен быть оговорен метод измерения.
12. Конструктивные данные, характеристики и другие данные
См. МЭК 747-1, гл.VI, п.7.
13. Дополнительные сведения
13.1. Нагрузочная способность по выходу
Максимальное число заданных нагрузок на каждом выходе. Эти сведения могут быть представлены для нескольких типов нагрузки.
13.2. Помехоустойчивость
В системе, состоящей исключительно из блоков, подобных рассматриваемому, помехоустойчивость может быть определена непосредственно исходя из восьми ранее заданных значений напряжений. Имеется четыре значения помехоустойчивости, которые определяют следующим образом:
![]() ;
; ![]() ;
;![]() ;
; ![]() .
.
На практике часто значения помехоустойчивости и
, соответствующие экстремальным значениям напряжения, не представляют особого интереса. Таким образом, если значение помехоустойчивости приводится без каких-либо дополнительных указаний, оно должно соответствовать наименьшему из значений
и
.
13.3. Межсоединения цифровых интегральных схем
Должны быть приведены примеры логических операций, которые могут быть выполнены путем межсоединений однотипных схем.
14. Меры предосторожности
Должны быть приняты соответствующие меры предосторожности для защиты прибора от высоких электростатических напряжений или больших электромагнитных полей (см. МЭК 747-1, гл.IX)
ПРИЛОЖЕНИЕ К РАЗДЕЛУ 1
ПРЕДСТАВЛЕНИЕ ХАРАКТЕРИСТИК
Ниже приводится пример представления характеристик схемы в соответствии с изложенным выше.
Следующие электрические характеристики должны указываться в заданных наиболее неблагоприятных электрических условиях с учетом рекомендуемого диапазона напряжений питания согласно п.4.1 разд.1 и:
а) в заданном диапазоне рабочих температур или
b) при температуре 25 °С и при максимальной, и при минимальной рабочих температурах.
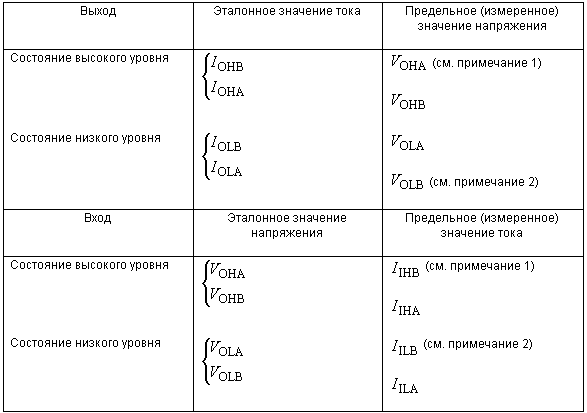
Примечания:
1. Эти два значения необязательны, если равно наиболее положительному значению наиболее положительного напряжения питания.
2. Эти два значения необязательны, если равно наиболее отрицательному значению наиболее отрицательного напряжения питания.
Раздел II. ИНТЕГРАЛЬНЫЕ СХЕМЫ ЗАПОМИНАЮЩИХ УСТРОЙСТВ
А. Статические и динамические оперативные запоминающие устройства и постоянные запоминающие устройства
1. Обозначение и описание схемы
См. п.1 разд.I.
2. Функциональное назначение
2.1. Блок-схема
Пункт 2.1 разд.I и следующее дополнение.
Блок-схема должна быть достаточно подробной, чтобы на ней можно было представить отдельные функциональные блоки памяти (например, дешифратор адреса, разрешение кристалла, "буферные" схемы на выходе и т.д.), а также их внешние соединения.
2.2. Описание функции
Следует указать выполняемые схемой функции и представить следующую информацию:
a) общее число битов информации, которые могут храниться в ЗУ;
b) число битов в слове, которые могут храниться в ЗУ;
c) способ адресации;
d) функция(и), выполняемая(ые) на каждом выводе, а также определение каждого управляющего сигнала и необходимая последовательность команд (см. также п.7.2.1 настоящего раздела);
e) для динамических ЗУ метод восстановления.
3. Предельно допустимые значения параметров
Пункт 3 разд.I и следующее дополнение.
Для п.3.2.1 должны быть оговорены допустимые превышения, их длительность и рабочий цикл.
3.5. Рассеиваемая мощность (при необходимости)
Максимальное значение рассеиваемой мощности в статическом режиме.
3.6. Время перехода на входе (при необходимости, для динамических ЗУ)
Минимальные значения.
4. Рекомендуемые рабочие условия (в заданном диапазоне рабочих температур)
Пункт 4 разд.I и следующее дополнение.
Если до начала работы прибора необходимо создание предварительных условий, таких как последовательность подачи напряжений, холостые циклы или последовательность подачи сигналов, то такие условия должны быть указаны.
5. Статические электрические характеристики биполярных схем запоминающих устройств
Пункт 5 разд.I.
6. Статические электрические характеристики МОП-схем запоминающих устройств
Пункт 6 разд.I.
7. Динамические электрические характеристики
Каждая электрическая характеристика, приведенная в п.7.1, должна быть указана в заданных наиболее неблагоприятных электрических условиях в рекомендуемом диапазоне напряжения(й) питания, как указано в п.4.1 разд.I.
Согласно требованиям п.7.1 предельно допустимые значения или, если они не согласованы между изготовителем и потребителем, типовые значения следует указывать:
а) в заданном диапазоне рабочих температур (например, в виде кривой) или
b) при температуре 25 °С и при максимальной и минимальной рабочих температурах.
Условие b) следует использовать только в том случае, если значение характеристики для наиболее неблагоприятных условий во всем диапазоне температур можно вывести из значений, указанных при заданных температурах.
Во всех случаях предельно допустимые значения следует указывать при температуре 25 °С.
7.1. Временные характеристики быстродействия схемы
Должны быть указаны следующие временные характеристики в заданных условиях.
7.1.1. Время выборки (см. примечания 1 и 2)
а) Время выборки считывания.
b) Время выборки от каждого сигнала разрешения и выбора, заданного для ЗУ (см. примечание 3).
c) Время выборки адреса (эта характеристика не используется, если информация адреса учитывается лишь при хранении ее в памяти).
Для каждой из вышеуказанных характеристик должно быть оговорено максимальное значение.
Примечания:
1. Условия измерений должны быть заданы таким образом, чтобы все сигналы управления были приложены достаточно рано и тем самым не оказали влияния на заданное время выборки.
2. Контрольные условия измерений времени выборки должны включать в себя максимальные значения времени установления.
3. Если оговаривают постоянную последовательность сигналов разрешения и/или выбора (см. п.7.2.1) и последний из этих сигналов всегда определяет фактическое время выборки, то время выборки следует указывать для первого и последнего сигналов.
7.1.2. Время восстановления сигнала считывания (только для оперативных ЗУ)
Максимальное значение.
Примечание. Если управление функциями "считывания" и "записи" производится через один и тот же вывод, то "время выборки считывания" и "время восстановления сигнала считывания" будут иметь одно и то же значение, и оговаривать следует только одну из этих характеристик.
7.1.3. Время запрещения на выходе
Время запрещения на выходе, измеренное от окончания сигналов разрешения и выбора.
Максимальные значения.
Примечание. Время запрещения на выходе - это интервал между окончанием заданного сигнала разрешения или выбора и моментом снятия информации на выходе.
7.1.4. Время перехода (см. примечание 1)
Время перехода следует указывать в заданных условиях (см. примечание 2):
а) если типовое значение времени перехода сравнимо (см. примечание 3) или превышает типовое значение времени задержки переключения, следует указывать максимальное значение времени перехода;
b) если типовое значение времени перехода менее 10 нc, следует указывать минимальное значение (см. примечание 4);
c) при наличии двух условий а) и b) следует указывать минимальное и максимальное значения.
В случае необходимости время перехода указывают для обоих направлений перехода (т.е. и
).
Примечания:
1. В основном следует оговаривать значение времени для каждого или обоих направлений перехода выходного сигнала. В некоторых случаях (например, ЗУ на МОП-схемах), когда важно лишь одно направление перехода (например, значение выходного напряжения стремится достигнуть значения напряжения питания), следует указывать только это значение.
2. Заданные условия измерения должны включать в себя характеристики входного импульса и осциллографа (или другого соответствующего измерительного прибора), а также состояние и значение компонентов цепи нагрузки на выходе.
3. Считают, что время перехода сравнимо со временем задержки переключения, если его значение превышает 50% значения времени задержки переключения.
4. Необходимо установить, когда время перехода станет очень малым, что может привести к явлению выброса, а также к проблемам, связанным с применением реальных нагрузок.
7.2. Требования на входах для обеспечения правильной последовательности работы запоминающих устройств
7.2.1. Статические запоминающие устройства
К статическим оперативным, запоминающим устройствам предъявляют следующие временные требования, которые соответствуют основным принципам, изложенным в п.7.3 разд.I.
Должна быть представлена следующая временная диаграмма, содержащая полный набор сигналов, необходимых для обеспечения каждой операции ЗУ и измерения соответствующих временных параметров. Этот набор сигналов должен соответствовать управляющим сигналам, оговоренным в п.2.2d) настоящего раздела.
Должна быть указана временная последовательность, а также все временные интервалы, необходимые пользователю для правильной работы ЗУ.
Таким образом, должны быть указаны следующие временные характеристики.
7.2.1.1. Время цикла
Время цикла считывания, время цикла записи и, при необходимости, время цикла считывание-запись и/или время цикла запись-считывание (минимальные значения).
Примечание. В пп.7.2.1.2-7.2.1.5 термины "разрешение" и "выбор" используют в качестве синонимов, так как их определения еще не приняты. Всякий раз, когда употребляют термин "разрешение-выбор", его следует трактовать в соответствии с рассматриваемым типом ЗУ. Следует отметить, что приведенные в п.7.2.1.2 и 7.2.1.3 время установления и время сохранения предполагают отсутствие в ЗУ устройства синхронизации через вход "разрешение/выбор". Если же такое устройство имеется, то время установления и время сохранения, измеряемые относительно окончания сигнала записи и окончания сигнала разрешения/выбора, должны измеряться просто относительно "записи и разрешения/выбора".
7.2.1.2. Время установления
Минимальные значения:
а) времени установления сигнала адреса до сигнала записи или сигнала адреса до сигнала разрешения/выбора (см. примечание);
b) времени установления сигнала разрешения/выбора до окончания сигнала записи;
c) времени установления информации на входе до окончания сигнала записи при заданном минимальном значении длительности импульса разрешения/выбора (см. примечание) или
d) времени установления информации на входе до окончания сигнала разрешения/выбора при заданном минимальном значении длительности импульсов разрешения/выбора (см. примечание);
e) для сложных ЗУ, работающих с несколькими управляющими сигналами разрешения или выбора, необходимо также указать, по крайней мере, одно дополнительное время установления для каждого дополнительного сигнала разрешения или выбора.
Примечание. Выбор сигнала записи или разрешения/выбора в качестве контрольного зависит от того, какой из этих сигналов первым переходит в неактивное состояние, и такой выбор должен согласовываться с временной последовательностью, приведенной в п.7.2.1. Если последовательность, в которой сигналы записи и разрешения/выбора переходят в неактивное состояние, не имеет значения, это следует оговорить, как и оба значения с) и d).
Для ЗУ, в которых не предусмотрено выполнение функции разрешения/выбора, приводят только два значения а) и с).
7.2.1.3. Время удержания
По аналогии со временем установления минимальные значения:
а) времени удержания сигнала адреса после окончания сигнала записи или сигнала адреса после окончания сигнала разрешения/выбора (см. примечание);
b) времени удержания сигнала разрешения/выбора после окончания сигнала записи или сигнала записи после окончания сигнала разрешения/выбора (см. примечание);
c) времени удержания информации на входе после окончания сигнала записи или информации на входе после окончания сигнала разрешения/выбора (см. примечание);
d) для сложных ЗУ, работающих с несколькими управляющими сигналами разрешения или выбора, необходимо указать, по крайней мере, одно дополнительное время удержания, соответствующее каждому дополнительному сигналу разрешения или выбора.
Примечание. Выбор сигнала записи или разрешения/выбора в качестве эталонного зависит от того, какой из этих сигналов первым переходит в неактивное состояние, и такой выбор должен согласовываться с временной последовательностью, представленной в п.7.2.1. Если последовательность, в которой сигналы записи и разрешения/выбора переходят в неактивное состояние, не имеет значения, это следует указать и оговорить оба значения а) и с). Для ЗУ, в которых не предусмотрено выполнение функции разрешения/выбора, указывают только два значения а) и с).
7.2.1.4. Время восстановления сигнала записи
Минимальное значение.
Примечание. Для некоторых ЗУ время восстановления сигнала записи равно времени удержания сигнала адреса после окончания сигнала записи, в том числе следует указывать только одно значение.
7.2.1.5. Длительность импульсов
Минимальное значение:
- длительности импульса записи;
- длительности импульса разрешения/выбора, при необходимости (см. п.7.2.1.2d).
7.2.2. Динамические ЗУ
К динамическим оперативным ЗУ предъявляют следующие временные требования, которые соответствуют основным принципам, изложенным в п.7.2 разд.I.
Должна быть представлена временная диаграмма, содержащая полный набор сигналов, необходимых для обеспечения каждой операции ЗУ и измерения соответствующих временных параметров. Данный набор сигналов должен соответствовать управляющим сигналам, оговоренным в п.2.2d) настоящего раздела.
Должна быть указана временная последовательность, а также все временные интервалы, необходимые пользователю для правильной работы ЗУ. Таким образом, должны быть указаны следующие временные характеристики.
7.2.2.1. Запоминающие устройства с входом разрешения, кроме запоминающих устройств с многократными входами адреса
a) Время установления (минимальные значения):
- время установления сигнала адреса до сигнала разрешения;
- время установления сигнала считывания до сигнала разрешения;
- время установления сигнала выбора кристалла до сигнала разрешения (при необходимости);
- время установления сигнала записи до сигнала разрешения;
- время установления информации на входе до сигнала записи;
- время установления информации на входе до сигнала разрешения.
b) Время удержания:
- время удержания сигнала адреса после сигнала разрешения;
- время удержания сигнала считывания после сигнала разрешения;
- время удержания сигнала выбора кристалла после сигнала разрешения, при необходимости;
- время удержания сигнала записи после сигнала разрешения, при необходимости;
- время удержания информации на входе после сигнала разрешения;
- время удержания информации на входе после сигнала записи.
c) Время цикла (минимальные значения):
- время цикла считывания;
- время цикла записи;
- время цикла считывание-информация-запись (при необходимости);
- время цикла считывание-запись (при необходимости).
d) Длительность импульса (минимальные и, при необходимости, максимальные значения):
- длительность импульса считывания;
- длительность импульса записи;
- длительность импульса разрешения.
е) Время предзаряда - минимальные значения.
f) Время регенерации - максимальные значения.
g) Время перехода (минимальные и максимальные значения):
- время нарастания сигнала разрешения;
- время спада сигнала разрешения;
- время перехода сигнала выбора записи-считывания (при необходимости).
7.2.2.2. Запоминающие устройства с многократными входами адреса
а) Время установления (минимальные значения):
- время установления сигнала адреса строки до сигнала выбора адреса строки;
- время установления сигнала адреса столбца до сигнала выбора адреса столбца;
- время установления сигнала считывания до сигнала выбора адреса столбца;
- время установления информации на входе до сигнала выбора адреса столбца (при необходимости);
- время установления информации на входе до сигнала записи;
- время установления сигнала записи до сигнала выбора адреса столбца;
- время установления сигнала записи до сигнала выбора адреса строки;
- время установления сигнала выбора кристалла до сигнала выбора адреса столбца (при необходимости).
b) Время удержания (минимальные значения):
- время удержания сигнала адреса столбца после сигнала выбора адреса строки;
- время удержания сигнала считывания после сигнала выбора адреса столбца;
- время удержания сигнала записи после сигнала выбора адреса столбца;
- время удержания сигнала записи после сигнала выбора адреса строки;
- время удержания информации на входе после сигнала выбора адреса столбца;
- время удержания информации на входе после сигнала выбора адреса строки;
- время удержания информации на входе после сигнала записи;
- время удержания сигнала выбора кристалла после сигнала выбора адреса строки (при необходимости).
c) Время задержки между входными сигналами (минимальные значения):
- время задержки между сигналом выбора адреса столбца, переходящим в неактивное состояние, и сигналом выбора адреса строки, переходящим в активное состояние;
- время задержки между сигналом выбора адреса столбца, переходящим в активное состояние, и сигналом выбора адреса строки, переходящим в неактивное состояние.
d) Время цикла (минимальные значения):
- время цикла считывания;
- время цикла записи;
- время цикла запись-считывание, при необходимости;
- время цикла считывание-модификация-запись (при необходимости);
- время цикла страницы (при необходимости).
e) Длительность импульса (при необходимости, минимальные и/или максимальные значения):
- длительность импульса выбора адреса строки;
- длительность импульса выбора адреса столбца;
- длительность импульса записи.
f) Время предзаряда (минимальные и, при необходимости, максимальные значения):
- время предзаряда сигнала выбора адреса строки;
- время предзаряда сигнала выбора адреса столбца по отношению к сигналу выбора адреса строки;
- время предзаряда сигнала выбора адреса столбца.
g) Время регенерации - максимальные значения.
h) Время перехода (минимальное и максимальное значения):
- время перехода сигнала выбора адреса строки;
- время перехода сигнала считывание-запись (при необходимости);
- время перехода сигнала разрешения (выбора кристалла).
7.3. Входная и выходная емкости
Типовое и максимальное значения входной и выходной емкостей в заданных условиях.
8. Мощность или ток потребления от каждого источника питания (в статическом режиме)
Максимальные значения тока на каждом выводе питания в самых неблагоприятных условиях как для рабочего, так и для холостого хода, если они значительно отличаются друг от друга. Следует также указать типовые значения при нормальных рабочих условиях.
9. Мощность или ток потребления от каждого источника питания (в динамическом режиме)
График(и), представляющий(ие) зависимость типовых значений тока потребления от частоты повторения импульсов, или типовые значения на двух заданных частотах повторения. График(и) зависимости следует указывать для заданных рекомендуемых условий эксплуатации.
В случае необходимости эти сведения должны быть также приведены для входов генератора тактовых импульсов, работающего в качестве источника импульсов.
В случае необходимости эти сведения должны быть также приведены для режима холостого хода.
10. Конструктивные данные, характеристики и другие данные
Должны быть оговорены любые специальные конструктивные данные или характеристики, зависящие от условий окружающей среды для интегральных схем ЗУ (см. также МЭК 747-1, гл.VI, п.7).
11. Дополнительные сведения
11.1. Нагрузочная способность по выходу
Максимальное число заданных нагрузок на каждом выходе. Эти сведения могут быть представлены для нескольких типов нагрузки.
11.2. Помехоустойчивость
Данные, позволяющие вычислить помехоустойчивость, представлены в пп.5 и 6 (см. также п.13.2, разд.I).
11.3. Соединения однотипных схем
Следует привести примеры логических операций (например, проводное ""), которые могут быть выполнены путем соединения однотипных ЗУ.
11.4. Тип схемы на выходе
Следует представить сведения относительно типа схемы на выходе, например схема с тремя состояниями, схема с открытым коллектором, схема с открытым стоком, двухтактовая схема.
11.5. Соединения со схемами других типов
В случае необходимости следует представить подробные сведения о соединениях с другими схемами, например с усилителями считывания, буферными схемами и т.д.
12. Меры предосторожности
См. МЭК 747-1, гл.IX.
В. Постоянные запоминающие устройства, программируемые пользователем
Материал настоящего подраздела относится к программируемым и перепрограммируемым ПЗУ, в последних из которых содержимое либо стирается ультрафиолетовым излучением и программируется электрически, либо стирается и программируется электрически.
1. Обозначение и описание схемы
Применимы сведения, содержащиеся в п.1 разд.I, гл.III, а также следующее дополнение к п.1.2 (технология).
Следует также указать конкретный тип ячейки памяти: диодная матрица, ячейка с плавкими вставками, ячейка лавинно-инжекционного типа с плавающим затвором и т.д.
2. Функциональное назначение
2.1. Блок-схема
Должна быть приведена блок-схема или эквивалентная информация о цифровой интегральной схеме.
На блок-схеме должна быть указана функция каждого внешнего соединения, а также, если это не приведет к неправильному толкованию, могут быть приведены номера выводов. Если корпус содержит металлические части, то должны быть указаны внешние выводы, к которым возможно подсоединение этих частей. При необходимости могут быть указаны соединения с соответствующими внешними электрическими элементами. В качестве дополнительной информации может быть представлена полная электрическая схема. Указание значений параметров компонентов схемы необязательно.
Блок-схема должна быть достаточно подробной, позволяющей определить каждый конкретный функциональный узел в ЗУ (например декодирование адреса, разрешение кристалла, буферные схемы на выходе, схемы управления программированием-стиранием и т.д.) вместе с их внешними соединениями.
2.2. Обозначение выводов
На блок-схеме должны быть обозначены следующие выводы:
а) выводы питания, т.е. выводы, предназначенные для подсоединения к источникам питания;
b) выводы входа или выхода, т.е. выводы, к которым или от которых проводят сигналы. Под термином "сигнал" понимают как импульс, так и более сложную форму сигнала;
c) выводы входа/выхода, т.е. выводы, которые могут использоваться в различное время как выводы входа или выхода;
d) выводы выхода с тремя состояниями, т.е. выводы выхода, на которых могут быть созданы условия высокого полного сопротивления;
e) многофункциональные выводы, т.е. выводы, которые могут использоваться в различное время для различных функций, например программирования и стирания.
2.3. Описание функции
Следует указать выполняемые схемой функции и представить следующую информацию:
a) общее число битов информации, которые могут храниться в запоминающем устройстве;
b) число битов в слове, которые могут храниться в запоминающем устройстве;
c) способ адресации для режима считывания;
d) функция(и), выполняемая(ые) каждым выводом, а также указание каждого необходимого управляющего сигнала и необходимая последовательность операций или команд;
e) способ программирования;
f) способ стирания всего содержимого ЗУ или его части;
g) уровень на выходе в непрограммируемом состоянии.
3. Предельно допустимые значения параметров
Применяют сведения, содержащиеся в п.3 разд.I, гл.III, а также дополнения:
a) к п.3.2.1: "... то допустимые превышения значений, их длительность и рабочий цикл должны быть оговорены";
b) 3.5: "Максимальное число циклов программирование-стирание (при необходимости)".
4. Режим считывания
4.1. Рекомендуемые рабочие условия (в заданном диапазоне рабочих температур)
См. п.4 разд.I, гл.III.
4.2. Статические электрические характеристики
Должны быть приведены следующие электрические характеристики.
a) Входные и выходные токи
Для биполярных интегральных схем применяют требования, содержащиеся в пп.5 и 5.3 разд.I гл.III.
Для МОП-интегральных схем применяют требования, содержащиеся в пп.6, 6.2.1 и 6.2.2 разд.I гл.III.
b) Входные и выходные напряжения
Для биполярных интегральных схем применяют требования, содержащиеся в пп.5 и 5.1 разд.I гл.III.
Для МОП-интегральных схем применяют требования, содержащиеся в пп.6 и 6.1 разд.I гл.III.
c) Входное фиксирующее напряжение
Применяют требования п.5.2 разд.I гл.III.
d) Ток(и) короткого замыкания на выходе
Максимальное и/или минимальное значения.
e) Входной и выходной токи утечки (при необходимости)
Максимальные значения.
f) Входная и выходная емкости
Типовое и максимальное значения в заданных условиях.
4.3. Динамические электрические характеристики
4.3.1. Общие положения
Применяют требования к динамическим электрическим характеристикам, приведенные в п.7 разд.II (подраздел А) и касающиеся напряжений питания и рабочих температур.
4.3.2. Временные характеристики быстродействия схемы
Должны быть приведены следующие электрические характеристики. Эти характеристики применяют после программирования ЗУ.
a) Время выборки
Применяют требования п.7.1.1 разд.II главы III.
b) Время запрещения на выходе
Применяют требования п.7.1.3 разд.II главы III.
c) Время сохранения информации на выходе
Минимальное(ые) значение(я) с момента окончания каждого сигнала разрешения и/или выбора.
d) Время перехода
Применяют требования п.7.1.4 разд.II гл.III.
4.4. Временные параметры
При необходимости указывают все или какие-либо из приведенных ниже временных требований.
a) Время установления
Минимальное(ые) значение(я).
(Например, время установления сигнала адреса до сигнала разрешения).
b) Время удержания
Минимальное(ые) значение(я).
(Например, время удержания сигнала адреса после сигнала разрешения).
c) Время цикла считывания
Минимальное и/или максимальное значения.
5. Режим программирования
5.1. Процедура программирования
Должна быть указана рекомендуемая процедура программирования. При необходимости может быть указан способ и режим (например, напряжение считывания, статические и динамические характеристики импульсов программирования, число импульсов программирования).
Если до программирования требуется операция стирания, то это должно быть оговорено.
5.2. Рекомендуемые режимы программирования
Заданные режимы программирования должны указываться в соответствии с п.4 разд.I гл.III.
Если диапазон температур, используемый в процессе программирования, отличается от диапазона рабочих температур, то это должно быть оговорено.
Следует указать максимальные и/или минимальные значения приведенных ниже электрических режимов и/или характеристик:
a) ток(и) и/или напряжение(я) питания при подаче импульса программирования;
b) ток(и) и/или напряжение(я) на выводах, на которые подается импульс программирования;
c) выходной(ые) ток(и) и/или напряжение(я) на любом выводе при программном управлении.
5.3. Временные параметры
5.3.1. Приборы, имеющие специальные выводы программирования
Следует привести временную диаграмму и оговорить следующие временные требования:
I) длительность (ширина) импульса программирования - минимальное и максимальное значения;
II) время нарастания импульса программирования - минимальное и/или максимальное значения;
III) время спада импульса программирования - минимальное и/или максимальное значения;
IV) рабочий цикл программирования (при необходимости) - максимальное значение;
V) время установления.
Должны быть приведены минимальные значения времени установления:
a) сигнала адреса до импульса программирования или разрешения программирования (см. примечание);
b) информация на входе до импульса программирования или разрешение* программирования (см. примечание);
________________
* Текст соответствует оригиналу. - .
с) сигнал разрешения программирования до импульса программирования (при необходимости).
VI) Время удержания
Должны быть приведены специальные значения для времени удержания:
a) сигнала адреса после окончания импульса программирования или сигнала разрешения программирования (см. примечание);
b) информация на входе после окончания импульса программирования или сигнала разрешения программирования (см. примечание);
c) сигнала адреса после окончания сигнала информации на входе;
d) сигнала разрешения программирования после окончания импульса программирования (при необходимости).
Примечание. Выбор между импульсом программирования и сигналом разрешения программирования в качестве контрольного зависит от того, который из них первым переходит в неактивное состояние, что должно быть отражено на приводимой временной диаграмме.
5.3.2. Приборы, не имеющие специальных выводов программирования
Параметры находятся на рассмотрении.
6. Режим стирания (если применяется)
Должно быть приведено описание процесса стирания, а также диапазон рабочих температур, при которых производят стирание.
6.1. ЗУ с электрическим стиранием информации
6.1.1. Рекомендуемые режимы стирания
Должны быть указаны минимальные и/или максимальные значения для приводимых ниже электрических режимов стирания:
a) ток(и) и/или напряжение(я) источника питания при подаче импульса стирания;
b) ток(и) и/или напряжение(я) на оговоренных выводах, на которые подается импульс стирания;
c) входные ток(и) и/или напряжение(я) на любом другом выводе, используемом при операции стирания.
Примечание. Если используемый при стирании диапазон температур отличается от диапазона рабочих температур, то это должно быть указано.
6.1.2. Временные параметры (стирание)
6.1.2.1. Приборы, имеющие специальные выводы стирания
Следует указывать следующие временные параметры:
I) длительность (ширина) импульса стирания - минимальное и максимальное значения;
II) время нарастания импульса стирания - минимальное и/или максимальное значения;
III) время спада импульса стирания - минимальное и/или максимальное значения;
IV) рабочий цикл стирания (при необходимости) - максимальное значение;
V) время установления:
- сигнала адреса до начала импульса стирания - минимальное значение;
- сигнала разрешения до начала импульса стирания (при необходимости) - минимальное значение;
VI) время удержания:
- сигнала адреса после окончания импульса стирания - минимальное значение;
- сигнала разрешения после окончания импульса стирания (при необходимости) - минимальное значение.
6.1.2.2. Приборы, не имеющие специальных выводов стирания
Требования находятся на рассмотрении.
6.2. ЗУ со стиранием информации ультрафиолетовым излучением
6.2.1. Рекомендуемые режимы стирания
Необходимо указать следующие значения и допуски на них:
a) длину волны ультрафиолетового излучения;
b) силу ультрафиолетового излучения на прозрачном окне корпуса;
c) время экспонирования.
7. Число циклов программирование-стирание
Необходимо указать минимальное число циклов программирование-стирание, которые могут быть выполнены при заданных рабочих режимах.
Примечание. Число циклов зависит от условий импульсов программирования и/или стирания, от времени работы и температуры.
8. Сведения о сохранении информации
При необходимости, например для ПЗУ с электрическим программированием и стиранием, могут быть приведены следующие сведения о сохранении информации:
a) максимальное число операций считывания;
b) максимальное время удержания информации.
9. Мощность или ток потребления от каждого источника питания (в статическом режиме)
Максимальные значения тока на каждом выводе питания при самых неблагоприятных условиях как для рабочего, так и для холостого хода, если они значительно отличаются друг от друга. Кроме того, должны быть приведены типовые значения при нормальных рабочих условиях.
10. Мощность или ток потребления от каждого источника питания (в динамическом режиме)
График(и), представляющий(ие) зависимость типовых значений тока потребления от частоты повторения импульсов, или типовые значения на двух заданных частотах повторения. Эти графики следует указывать для заданных рекомендуемых рабочих условий.
При необходимости указанные выше сведения должны быть также приведены для генераторов тактовых импульсов, работающих в качестве источника импульсов.
В случае необходимости эти сведения должны быть также приведены для режима холостого хода.
11. Конструктивные данные, характеристики и другие данные
Должны быть оговорены любые специальные конструктивные данные или характеристики, зависящие от условий окружающей среды для программируемых ПЗУ (см. также МЭК 747-1, гл.VI, п.7).
12. Дополнительные сведения
12.1. Коэффициент нагрузки по выходу
Максимальное число заданных нагрузок на каждом выходе. Эти сведения могут быть приведены для нескольких типов нагрузки.
12.2. Электрическая помехоустойчивость
Сведения о программируемых ПЗУ, позволяющие вычислить помехоустойчивость, приведены в п.13.2 разд.I гл.III.
12.3. Межсоединения однотипных схем
Следует привести примеры логических операций (например проводное "ИЛИ"), которые могут быть выполнены путем межсоединения однотипных ЗУ.
12.4. Тип схемы на выходе
Следует представить сведения относительно типа схемы на выходе, например схема с тремя состояниями, схема с открытым коллектором, схема с открытым стоком, двухтактовая схема.
12.5. Соединения со схемами других типов
В случае необходимости следует представить подробные сведения о соединениях с другими схемами, например с усилителями считывания, буферными устройствами и т.д.
13. Меры предосторожности
В случае необходимости должны быть приведены следующие сведения:
а) меры предосторожности для программируемых ПЗУ, чувствительных к статическому электричеству, как указано в МЭК 747-1, гл.IX;
b) меры предосторожности, которые следует принимать во избежание возникновения сверхвысоких напряжений при программировании;
c) особые меры предосторожности после программирования, например закрывание прозрачного окна в целях защиты от ультрафиолетового излучения, производимого ПЗУ при стирании информации;
d) меры предосторожности против электромагнитного и радиоактивного излучений.
Раздел III. МИКРОПРОЦЕССОРНЫЕ ИНТЕГРАЛЬНЫЕ СХЕМЫ
Настоящий раздел касается микропроцессоров, состоящих из одной интегральной схемы, а также совокупности интегральных схем, функционирующих как микропроцессор, но не является обязательным для отдельных интегральных схем, составляющих такую совокупность.
1. Обозначение и описание схемы
См. п.1 разд.I гл.II, а также следующее дополнение.
1.4. Электрическая совместимость
Следует указывать, совместима ли электрически данная интегральная схема с другими конкретными интегральными схемами или семействами интегральных схем или требуются специальные интерфейсные схемы. Должны быть представлены подробные данные, касающиеся типа схемы на выходе, например схема с тремя состояниями, схема с открытым коллектором и т.д.
2. Функциональное назначение
2.1. Блок-схема
См. п.2.1 разд.I и гл.III, а также следующее дополнение.
На блок-схеме должны быть достаточно подробно представлены отдельные функциональные узлы микропроцессора, реализующие выполнение определенных команд, в том числе функциональные блоки, программируемые пользователем (например программируемые логические матрицы, ПЗУ и т.д.). Следует также указывать основные каналы передачи данных, а также обозначение их внешних соединений.
2.1.1. Обозначение выводов
На блок-схеме следует указывать следующие выводы:
- выводы питания, т.е. выводы, предназначенные для подсоединения к источникам питания;
- выводы входа или выхода, т.е. выводы, на которые подаются или с которых снимаются сигналы. Понятие "сигнал" включает импульс и более сложные формы сигналов;
- выводы входа/выхода, т.е. выводы, которые в разное время могут выполнять функции входа или выхода;
- выводы выхода с тремя состояниями, т.е. выводы выхода, на которых может быть установлено состояние высокого полного сопротивления.
2.2. Описание функции
Должна быть представлена следующая информация:
a) размер обрабатываемого слова в битах;
b) диапазон адресации для каждого типа памяти, где используется определенный тип адресации, например для внутренней или внешней памяти, ОЗУ или ПЗУ;
c) размер адресуемого слова в битах для каждого типа памяти, если он отличается от значения, оговоренного в позиции а);
d) размер адреса в битах;
e) число, типы и размер в битах и словах внутренних регистров как с программной адресацией, так и других, например регистра общего назначения, сумматора, индексного регистра, программного счетчика, указателя и регистра стека*, контрольного регистра, арифметико-логического блока, регистра как состояния.
_________________
* Текст соответствует оригиналу. - .
Примечание. Коды состояния несут информацию о результатах арифметических или логических операций, таких как нулевой результат, четность, знак, перенос, переполнение и т.д.
f) способы адресации памяти, например непосредственный, прямой, отрицательный, индексный, косвенный;
g) типы прерывания, например программа разрешения/запрещения, векторная и другие;
h) методы передачи входной и выходной информации и адресов, например последовательный, параллельный или сочетание обоих методов;
j) наличие или отсутствие микропрограммирования в микропроцессоре;
k) метод генерации импульсов синхронизации;
l) режим работы, статический или динамический.
2.3. Набор команд
Необходимо представить полный перечень выполняемых микропроцессором команд. В него должны войти: код команды, мнемоника команды, операция(и), выполняемая(ые) в результате подачи команды, в том числе коды состояния или содержимое регистров. Следует указывать число тактовых циклов. Предпочтительно также указывать число требуемых машинных циклов и, при необходимости, число программных слов, требуемое для составления команд, и способы адресации каждой команды.
Эти данные могут быть представлены для каждой команды или для каждой группы подобных команд. Следует указывать различия, возникающие в результате применения различных способов адресации.
2.4. Структура команд
Если необходимо, для представления побитовой организации командных слов следует описывать используемые форматы команд, как показано ниже. Эта информация представляется в виде диаграммы:
- поле кода информации;
- поле адреса;
- поле регистра;
- поле операнда.
2.5. Входные и выходные сигналы
Должна быть указана функция каждого сигнала на входе и выходе.
Сигналы подразделяют на:
- сигналы данных;
- сигналы адреса;
- сигналы управления.
Как минимум, сигналы управления определяют момент разрешения, передачи данных, направление передачи (а именно, в микропроцессор или из него) и должны содержать входной сигнал "RESET" (возврат), возвращающий микропроцессор в исходное состояние.
Можно привести примеры других сигналов управления.
a) Сигналы управления шиной:
- сигналы, которые определяют стабильность адресных битов и представляют достоверную информацию;
- сигналы, по которым выполняется операция обращения к памяти или периферийному устройству;
- сигналы управления работой шины при мультиплексной передаче сигналов;
- сигнал "READY" (готов), управляемый адресной памятью.
b) Управляющие сигналы исполнения:
- подтверждение получения запроса;
- подтверждение исполнения;
- приоритетный сигнал.
c) Другие управляющие сигналы:
- прерывание (маскированное);
- прерывание (немаскированное);
- подтверждение прерывания;
- состояние ожидания на выходе;
- блокировка выхода;
- синхронизация
и т.д.
3. Предельно допустимые значения параметров
Приведенные параметры должны характеризовать работу микропроцессора в заданном диапазоне рабочих температур. Если эти параметры зависят от температуры, такую зависимость следует оговаривать.
3.1. Предельно допустимые значения электрических параметров
3.1.1. Напряжение питания
a) Максимальное(ые) значение(ия) и полярность;
b) Максимальное значение напряжения между общим выводом питания и корпусом или опорным выводом, при необходимости.
c) Последовательность подачи и/или снятия напряжений питания, если это необходимо. Любые ограничения на продолжительность подачи и/или снятия напряжения следует оговаривать.
3.1.2. Входные напряжения
Максимальные значения по отношению к общему опорному выводу (и полярность, если необходимо).
3.1.3. Входные токи (если необходимо)
Максимальное значение.
3.1.4. Выходные напряжения
Максимальные значения по отношению к общему опорному выводу (и полярность, если необходимо).
3.1.5. Выходные токи
Максимальные значения.
3.2. Температура
a) Минимальное и максимальное значения температуры окружающей среды или в контрольной точке;
b) Минимальное и максимальное значения температуры хранения.
c) Максимальные значения температуры и продолжительности нагрева вывода.
3.3. Рассеиваемая мощность
Максимальное значение.
4. Рекомендуемые рабочие условия (в заданном диапазоне рабочих температур)
4.1. Напряжение питания
Полярность, номинальное значение и допуск(и) для каждого значения напряжения питания.
4.2. Входы синхронизации
a) Минимальное и максимальное значения напряжения низкого и высокого уровней.
b) Минимальное и максимальное значения времени нарастания и спада.
c) Минимальное и, если необходимо, максимальное значения периода синхронизации.
d) Минимальное и, если необходимо, максимальное значения длительности импульса. Для входов многофазной синхронизации эти данные следует указывать для каждого входа.
e) Для входов многофазной синхронизации минимальное и, если необходимо, максимальное значения интервала между последовательными фазами импульсов синхронизации.
4.3. Входные напряжения (исключая входы синхронизации)
Минимальное и максимальное значения напряжения низкого и высокого уровней.
4.4. Выходные токи
Максимальное и, если необходимо, минимальное значения при выходном напряжении как низкого, так и высокого уровня.
4.5. Внешние элементы (при необходимости)
Значение(я) и допуск(и) для любых внешних элементов, рекомендованных или предназначенных для использования с микропроцессором.
4.6. Время установления и время удержания
Минимальные и/или максимальные значения, если необходимо, для каждого входа (или группы входов) относительно соответствующего переходного периода импульса синхронизации при заданных значениях:
- времени нарастания и времени спада импульса синхронизации;
- входных напряжений на других выводах.
Значения следует указывать, чтобы пользователь мог установить временные параметры для каждой отдельной функции микропроцессора.
4.7. Временные диаграммы для управляющих последовательностей
Минимальная длительность входных сигналов и интервала между ними по отношению к импульсу(ам) синхронизации для входных последовательностей, необходимых для приведения микропроцессора в заданное состояние, например повторного запуска (или возврата), прерывания, хранения и т.д. Такие последовательности должны соответствовать последовательностям выполнения команд программы.
Они должны выражаться в тактовых циклах и, предпочтительно, в машинных циклах.
5. Электрические характеристики
5.1. Статические характеристики
Каждую электрическую характеристику, указанную в пп.5.1.1-5.1.4, следует приводить при заданных, наиболее неблагоприятных электрических условиях в рекомендуемом диапазоне напряжений питания согласно требованиям п.4.1, а также:
a) в заданном диапазоне рабочих температур или
b) при температуре 25 °С и при максимальном и минимальном значениях рабочей температуры.
5.1.1. Ток(и) питания
a) Статический режим
Типовое и максимальное значения тока, потребляемого от каждого источника питания в нормальном рабочем режиме, и, если необходимо, в холостом режиме, при заданных значениях:
- напряжения(ий) питания;
- частоты синхронизации.
Эти данные следует также указывать для входов синхронизации, работающих как импульсные источники питания.
b) Динамический режим
Также следует приводить типовые значения указанных выше характеристик либо при различных значениях частоты синхронизации, либо в виде кривой (или кривых) зависимости от частоты синхронизации.
5.1.2. Входные токи (в том числе входы синхронизации)
Максимальное(ые) значение(ия), если необходимо, в условиях как низкого, так и высокого уровней входного напряжения при заданных значениях:
- напряжения питания;
- входного напряжения;
- входных напряжений на других выводах.
Эти данные следует указывать также для входов, которые могут выполнять функции выходов.
5.1.3. Выходные напряжения
Максимальное значение выходного напряжения низкого уровня при заданных значениях:
- напряжения питания;
- тока нагрузки;
- входного(ых) напряжения(ий), если необходимо.
Эти данные следует также указывать для выходов, которые могут выполнять функции входов.
5.1.4. Выходные токи вывода в выключенном состоянии
Для выходов с тремя состояниями, которые могут быть блокированы (т.е. на них не устанавливается состояние высокого или низкого уровней), максимальное значение в выключенном состоянии при заданных значениях:
- напряжения питания;
- постоянного напряжения на соответствующем выводе;
- входных напряжений на других выводах.
5.1.5. Емкости
Максимальные значения емкостей на входе синхронизации, выводах входа и выхода при заданных значениях:
- напряжения(ий) питания;
- постоянного напряжения на соответствующем выводе;
- частоты;
- входных напряжений на других выводах.
5.2. Динамические характеристики
Каждую электрическую характеристику, указанную в п.5.2.1, следует приводить при заданных наиболее неблагоприятных электрических условиях в рекомендуемом диапазоне напряжений питания согласно требованиям п.4.1.
Следует приводить предельные значения, указанные в п.5.2.1, или, если они не согласованы между изготовителем и пользователем, типовые значения:
a) либо в заданном диапазоне рабочих температур;
b) либо при температуре 25 °С и при максимальном и минимальном значениях рабочей температуры.
Вариант b) следует использовать только в том случае, если соответствующее наиболее неблагоприятным условиям значение характеристики во всем диапазоне температур может быть получено, исходя из значений, указанных при заданных температурах.
В любом случае должны быть приведены предельные значения при температуре 25 °С.
5.2.1. Временные характеристики быстродействия схем
5.2.1.1. Время задержки переключения
Следует указывать следующие временные характеристики в заданных условиях (см. примечание 1):
a) - максимальное значение времени задержки переключения при переходе выходного сигнала к низкому уровню;
b) - максимальное значение времени задержки переключения при переходе выходного сигнала к высокому уровню.
При наличии нескольких различных логических информационных каналов временные характеристики следует представлять для каждого канала в отдельности.
Если необходимо, следует указывать дополнительные временные характеристики для выходов с тремя состояниями при переключении в состояние высокого полного сопротивления и выхода из него.
5.2.1.2. Время перехода
Время перехода следует указывать при заданных условиях (см. примечание 1):
a) если типовое значение времени перехода сравнимо (см. примечание 2) с типовым значением времени задержки переключения или превышает его, следует указывать максимальное значение времени перехода;
b) если типовое значение времени перехода меньше 10 нс, следует указывать минимальное значение (см. примечание 3);
c) при выполнении условий а) и b) следует указывать как минимальное, так и максимальное значения.
Если требуется, время перехода приводят для двух направлений перехода (т.е. и
).
Примечания:
1. Заданные условия измерения должны учитывать характеристики входного импульса, характеристики осциллографа (или другой соответствующей измерительной системы), а также расположение элементов цепи нагрузки на выходе и их параметры.
2. Считают, что время перехода сопоставимо со временем задержки переключения, если его значение превышает 50% значения времени задержки переключения.
3. Необходимо установить, когда время перехода станет очень малым, что может привести к явлению выброса и проблемам, связанным с применением реальных нагрузок.
6. Конструктивные параметры, характеристики и другие данные
Для каждого конкретного микропроцессора следует указывать любые специальные конструктивные параметры или климатические характеристики. См. п.7 гл.VI МЭК 747-1.
7. Дополнительные данные
7.1. Нагрузочная способность по выходу
Максимальное число заданных нагрузок на каждом выходе. Такие данные могут быть представлены для нагрузок нескольких типов.
7.2. Помехоустойчивость
Данные о микропроцессоре, позволяющие определить помехоустойчивость, представлены в пп.4.3 и 5.1.3 настоящего раздела (см. также п.13.2 разд.I).
7.3. Данные о применении
Могут быть приведены дополнительные данные об изменении характеристик, указанных в п.5, в зависимости от напряжения питания, полного сопротивления нагрузки и т.д.
В дополнение к изложенному в п.2.3 может быть представлена информация о действии каждой команды. В частности, следует представлять подробные данные о последовательностях и операциях при выполнении ветвления и прерывания программы.
В дополнение к изложенному в пп.2.3 и 4.7 может быть представлена информация о назначении и последовательностях операций для каждого входа или для группы входов. Могут быть также представлены диаграммы состояния и временные диаграммы.
Может быть представлена информация о времени выполнения отдельных команд, таких как двоичное сложение или перенос из регистра в регистр. Если указывают среднее время, должны быть приведены данные об используемой команде и времени выборки из памяти.
7.4. Другие данные
Следует указывать, обладает ли интегральная схема внутренними средствами защиты от высоких электростатических напряжений или электрических полей.
8. Меры предосторожности
См. МЭК 747-1, гл.IX.
Глава IV. МЕТОДЫ ИЗМЕРЕНИЙ
Раздел I. ОБЩИЕ ПОЛОЖЕНИЯ
1. Основные требования
Если не оговорено иное, применяют п.1 ГОСТ 29106 (МЭК 748-1), гл.VII, в котором дается ссылка на п.1 (введение) и п.2 (общие меры предосторожности) МЭК 747-1, гл.VII.
2. Специальные требования
2.1. Общие требования к измерению статических и динамических характеристик
2.1.1. Если не оговорено иное, при каждом измерении допуск на заданные значения напряжений и токов питания должен быть ±1%.
2.1.2. Если не оговорено иное, допуск на заданное значение температуры окружающей среды для измеряемого прибора должен быть ±2 °С.
2.1.3. Если для заданного вывода электрические условия не оговариваются, такой вывод остается свободным.
2.1.4. Для измерения напряжения должна(ы) быть указана(ы) контрольная(ые) точка(и).
Примечание. Контрольные точки для измерения напряжений сигнала и напряжения питания не обязательно должны совпадать.
2.1.5. Если прибор имеет внутреннее запоминающее устройство или обладает свойством гистерезиса, перед каждым измерением необходимо проводить цикл предварительной установки.
2.1.6. Если не оговорено иное, в процессе измерений прибор должен работать при совокупности условий в пределах диапазона, соответствующего "рекомендуемым рабочим условиям".
2.1.7. Прежде чем перейти к последующим измерениям, необходимо убедиться в том, что при любой комбинации входов состояние на выходе отвечает данным соответствующей функциональной таблицы, за исключением тех случаев, когда эта таблица изменяется в процессе самих измерений.
2.2. Заданные условия для статических характеристик
2.2.1. Измерения выходного напряжения или тока
Должны быть заданы следующие условия (см. примечание):
a) температура окружающей среды или в контрольной точке схемы;
b) значения напряжений или токов питания;
c) условия на каждом выводе входа;
d) условия на измеряемом выводе выхода;
e) условия на других выводах выхода.
Примечание. Условия измерения для "низкого" выхода могут отличаться от условий измерения для "высокого" выхода.
2.2.2. Измерение входного напряжения или тока
Должны быть заданы следующие условия (см. примечание):
а) температура окружающей среды или в контрольной точке схемы;
b) значения напряжений или токов питания;
c) условия на каждом выводе выхода;
d) условия на измеряемом выводе входа;
e) условия на других выводах входа.
Примечание. Условия измерения для "низкого" входа могут отличаться от условий измерения для "высокого" входа.
Некоторые приборы, имеющие внутреннее запоминающее устройство или обладающие свойством гистерезиса, могут иметь несколько значений входного полного сопротивления при определенном уровне на входе, и в этом случае может возникнуть необходимость в проведении нескольких измерений.
2.3. Заданные условия для динамических характеристик
Условия приводятся вместе с методами измерений.
Раздел II. МЕТОДЫ ИЗМЕРЕНИЙ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК
1. Выходные напряжения высокого и низкого уровней ( и
) (37)
а) Цель
Измерение выходных напряжений высокого и низкого уровня в заданных условиях.
Таблица применения методов измерений (приведенных в настоящем стандарте)
Номер ме- тода | Измеряемые характеристики | Классы, подклассы | Запоминающие устройства | Микро- | ||||||||
Комби- натор- ные схемы | Последовательностные схемы | Счет- чики | Регистры сдвига | ПЗУ | ЗУПВ стати- | ЗУПВ дина- мичес- кие | ||||||
моно- стабиль- | биста- биль- | аста- биль- | стати- | динами- | ||||||||
37 | Выходные напряжения высокого и низкого уровня | х | х | х | х | х | х | х | х | |||
38 | Входные токи высокого и низкого уровня | х | х | х | х | х | х | х | х | |||
40 | Ток короткого замыкания на выходе | х | х | х | х | х | х | х | х | |||
41 | Ток потребления в статическом режиме | х | х | х | х | х | х | х | х | |||
48 | Пороговое напряжение (на входе) и напряжение гистерезиса | х | х | |||||||||
1 | Общий ток потребления в динамическом режиме | х | х | х | х | х | х | |||||
2 | Мощность потребления по цепи синхронизации | х | х | |||||||||
6 | Входная и выходная емкости в режиме большого сигнала | х | х | х | х | х | х | х | х | х | ||
11 | Эквивалентные входные/выходные емкости/сопротивления | х | х | х | х | х | х | х | х | х | ||
3 | Время задержки переключения (биполярные схемы) | х | х | х | х | х | х | х | х | х | ||
7 | Время задержки переключения (МОП-схемы) | х | х | х | х | х | х | х | х | х | ||
4 | Время задержки и время перехода (биполярные схемы) | х | х | х | х | х | х | х | х | х | ||
5 | Время задержки и время перехода (МОП-схемы) | х | х | х | х | х | х | х | х | х | ||
8 | Время установления | х | х | х | х | х | х | х | х | |||
9 | Время удержания | х | х | х | х | х | х | х | х | |||
36 | Время обращения | х | х | х | х | х | х | х | ||||
49 | Время разрешения и время запрещения на выходе (для выходов с тремя состояниями) | х | х | х | х | х | х | х | х | х | ||
50-54 | Временные параметры, характеризующие интегральные схемы запоминающих устройств | х | х | х | ||||||||
10 | Частота переключения | х | х | х | х | х | х | х | ||||
b) Схема измерения
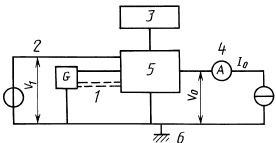
- источник напряжения и генератор импульсов; 1 - другие входы; 2 - измеряемый вход; 3 - источник питания;
4 - измеряемый выход; 5 - измеряемая схема; 6 - опорная шина
Черт.32
с) Описание схемы и требования к ней
Измерительное оборудование должно обеспечивать, если требуется, заданные условия на выходе.
При необходимости генератор импульсов должен подавать достаточное число независимых последовательностей импульсов для установления на выходе измеряемой схемы состояния в соответствии с функциональной таблицей. Генератор тока должен обладать способностью как подавать, так и потреблять ток.
d) Методика измерения
Интегральную схему подключают в схему измерения, как показано на черт.32; устанавливают заданные значения напряжения питания и входного напряжения; на выводах выхода устанавливают заданные условия.
Устанавливают заданное значение температуры, которое контролируют непосредственно до и после измерения.
На входе устанавливают условия и, при необходимости, последовательности импульсов, необходимые для установления на выходе заданного статического уровня. Измеряют выходное напряжение .
Примечание. Если измерение проводят в самых неблагоприятных условиях, то с помощью этого измерения можно одновременно проверять, удовлетворяют ли входные напряжения измеряемой схемы и соответствующие им выходные напряжения заданным предельно допустимым значениям.
Пример
Функция | Устанавливаемые условия | Предельно допустимые значения | |
Измеряемый вход | Прочие входы | Измеряемый выход | |
| |||
е) Заданные условия
Температура окружающей среды или в контрольной точке схемы.
Порядок установления (при необходимости) и последовательность измерений.
Значение(я) напряжения(й) питания.
Входное(ые) напряжение(я).
Выходной(ые) ток(и).
Направление(я) тока(ов).
2. Входные токи высокого и низкого уровней ( и
и  ) (38)
) (38)
а) Цель
Измерение входных токов высокого и низкого уровней в заданных условиях.
b) Схема измерения
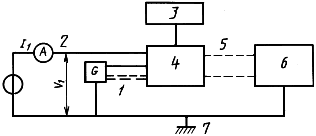
1 - другие входы; 2 - измеряемый вход; 3 - источник питания; 4 - измеряемая схема;
5 - выход(ы); 6 - цепь на выходе; 7 - опорная шина
Черт.33
с) Описание схемы и требования к ней
При необходимости генератор импульсов должен подавать достаточное количество независимых последовательностей импульсов для установления заданного внутреннего логического состояния.
Измерительное оборудование должно обеспечивать, если требуется, заданные условия на выходе.
d) Методика измерения
Интегральную схему подключают в схему измерения, как показано на черт.33; устанавливают заданные значения напряжения питания и входного напряжения; на выводах выхода устанавливают заданные условия.
Устанавливают заданное значение температуры, которое проверяют непосредственно до и после измерения.
При необходимости на вход подают импульсы, необходимые для установления заданного логического состояния. Измеряют ток.
Примечание. Обычно измерения проводят на каждом выводе входа отдельно.
e) Заданные условия
Температура окружающей среды или в контрольной точке схемы.
Порядок установления (при необходимости) и последовательность измерений.
Значение(я) напряжения(ий) питания.
Входное(ые) напряжение(я).
Условия на выходе, при необходимости.
3. Ток короткого замыкания на выходе  (40)
(40)
a) Цель
Измерение тока короткого замыкания на выходе в заданных условиях.
b) Схема измерения
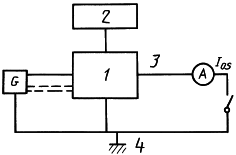
- источник напряжения и генератор импульсов; 1 - измеряемая схема;
2 - источник питания; 3 - измеряемый выход; 4 - опорная шина
Черт.34
c) Описание схемы и требования к ней
При необходимости генератор импульсов должен подавать достаточное количество независимых последовательностей импульсов для установления на выходе измеряемой схемы состояния в соответствии с функциональной таблицей.
Измерительное оборудование должно обеспечивать возможность устанавливать короткое замыкание между выводом выхода и заданной контрольной точкой (заданной длительности, если требуется), а также измерять ток короткого замыкания, не оказывая существенного влияния на схему короткого замыкания.
d) Меры предосторожности
Предельно допустимая рассеиваемая мощность не должна быть превышена.
e) Методика измерения
Интегральную схему подключают в измерительную схему, как показано на рис.34; устанавливают заданные значения напряжения питания и входного напряжения.
Устанавливают заданное значение температуры, которое контролируют непосредственно до и после измерения.
Если требуется, на вход подают последовательности импульсов, необходимые для установления на выходе заданного статического уровня.
Вывод выхода подсоединяют к заданной контрольной точке, и измеряют ток короткого замыкания .
До установления короткого замыкания устанавливают (например, с помощью соответствующей комбинации входных уровней) уровень выходного напряжения, наиболее отличающийся от контрольного уровня.
f) Заданные условия
Температура окружающей среды или в контрольной точке схемы.
Порядок установления, при необходимости.
Значение(я) напряжения(й) питания.
Входное(ые) напряжение(я).
Длительность короткого замыкания, если требуется.
Условия на других выводах.
Контрольная точка (при коротком замыкании).
4. Ток потребления в статическом режиме
a) Цель
Измерение тока потребления в заданных условиях.
b) Схема измерения

- источник напряжения и генератор импульсов; 1 - вход(ы); 2 - источник питания;
3 - измеряемая схема; 4 - выход(ы); 5 - цепь на выходе; 6 - опорная шина
Черт.35
c) Описание схемы и требования к ней
При необходимости генератор импульсов должен подавать достаточное количество независимых последовательностей импульсов для установления на выходе измеряемой схемы состояния в соответствии с функциональной таблицей.
d) Методика измерения
Интегральную схему подключают в измерительную схему, как показано на черт.35; устанавливают заданные значения напряжения питания и входного напряжения.
Устанавливают заданное значение температуры, которое контролируется непосредственно до и после измерения.
При необходимости на вход подают последовательности импульсов, необходимые для установления на выходе заданного статического уровня.
Измеряют соответствующее значение тока потребления.
e) Заданные условия
Температура окружающей среды или в контрольной точке схемы.
Порядок установления (при необходимости) и последовательность измерений.
Значение(я) напряжения(й) питания.
Входное(ые) напряжение(я).
Цепь(и) на выходе.
5. Пороговые напряжения (на входе) и напряжение гистерезиса (48)
а) Цель
Измерение порогового напряжения (на входе) и определение напряжения гистерезиса комбинаторной логической схемы с помощью такого метода измерения, при котором результат не зависит от динамических характеристик измеряемой схемы.
b) Схема измерения
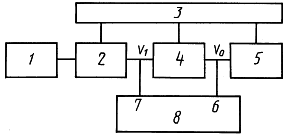
1 - генератор сигналов; 2 - цепь на входе; 3 - источник питания; 4 - измеряемая схема; 5 - цепь на выходе;
6 - измерение на выходе; 7 - измерение на входе; 8 - прибор для измерения напряжения
Черт.36
c) Описание схемы и требования к ней
Измерительное оборудование должно обеспечивать измерение напряжения на выходе в зависимости от напряжения на входе
. Измерительное оборудование должно обеспечивать подачу на вход сигнала треугольной формы, которую изменяют линейно или ступенчато; кроме того, оборудование должно содержать цепи на входе и выходе и подавать заданную температуру (
или
) измеряемой схемы.
d) Методика измерения
Устанавливают заданное значение температуры измеряемой схемы ( или
). Выводы входа и выхода подсоединяют, как указано, и подают заданное(ые) напряжение(я) питания. Генератор сигналов подключают и регулируют. Сигнал
с выхода измеряемой схемы подают на измерительный прибор, например на
-вход осциллографа. Сигнал треугольной формы
на входе измеряемой схемы также подают на измерительный прибор, в данном случае на
-вход осциллографа. Входное напряжение измеряют или считывают как значение
(или
) при переключении напряжения на выходе
к противоположному уровню или как значение
(или
) при переходе напряжения на выходе
к первоначальному уровню (эти два значения являются пороговыми напряжениями (на входе).
В результате получают переходную характеристику, показанную на черт.37. Напряжение гистерезиса вычисляют по формуле
![]() или
или ![]() .
.
Диаграмма перехода
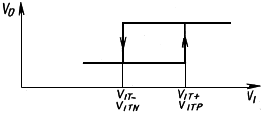
Черт.37
Примечание. На черт.38 и 39 приведены переходные характеристики для двух различных форм входного сигнала, любая из этих характеристик может быть использована для данного метода.
Переходная характеристика при лабораторных измерениях
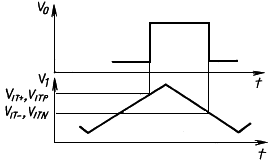
Черт.38
Переходная характеристика при автоматических измерениях
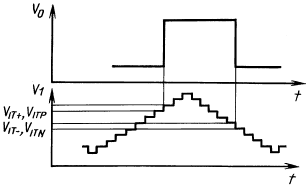
Черт.39
е) Заданные условия
Температура ( или
).
Напряжение(я) питания.
Характеристики входного сигнала.
Напряжение, изменяющееся линейно (линейность, время нарастания , время спада
, амплитуда сигнала), напряжение, изменяющееся ступенчато (разность напряжений на каждой ступени
, время удержания для каждой ступени
, амплитуда сигнала).
,
и
входного сигнала должны быть значительно больше времени задержки переключения
измеряемой схемы.
Цепи на входе и выходе (включая паразитную емкость).
Условия на других выводах.
Примечание. Точность измерения зависит непосредственно от амплитуды ступеней, которую следует учитывать.
Раздел III. МЕТОДЫ ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
1. Общий ток потребления в динамическом режиме (1)
а) Цель
Данный метод предназначен для измерения общего тока, потребляемого интегральной схемой от источника питания в зависимости от рабочей частоты. Метод предназначается только для измерения повторяющихся входных сигналов.
b) Схема измерения
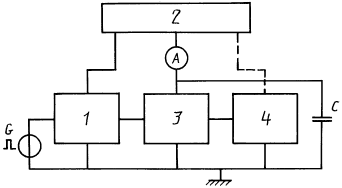
1 - цепь(и) управления на входе; 2 - источник питания; 3 - измеряемая схема; 4 - цепь(и) нагрузки на выходе
Черт.40
с) Описание схемы и требования к ней
Цепь(и) управления на входе, условия на других входах и цепь(и) нагрузки на выходе должны соответствовать заданным требованиям.
Должна быть задана форма(ы) входного импульса.
Полное сопротивление конденсатора должно быть низким во всем диапазоне частоты измерения.
Амперметр должен быть таким, чтобы с его помощью можно было измерить средний суммарный ток.
d) Меры предосторожности
Особых мер предосторожности не требуется.
e) Методика измерения
Устанавливают заданное значение температуры.
Интегральную схему подключают в схему измерения; устанавливают заданные значения напряжения(ий) питания, входного(ых) сигнала(ов) и условия на других входах; ток источника питания измеряют во всем диапазоне частоты измерения.
f) Заданные условия
Температура окружающей среды или в контрольной точке схемы.
Напряжение(я) питания.
Характеристики цепи(ей) управления на входе и цепи(ей) нагрузки на выходе.
Характеристики входных импульсов:
- амплитуда;
- длительность;
- время нарастания;
- время спада;
- коэффициент заполнения (50%, если не оговорено иное);
- диапазон частот повторения;
- взаимосвязь между различными импульсами, при необходимости;
- условия на других входах.
2. Мощность, потребляемая по цепи синхронизации (2)
a) Цель
Данный метод предназначен для измерения мощности, необходимой для управления схемой по цепи(ям) синхронизации.
b) Схема измерения
1 - цепь управления на входе синхронизации; 2 - измеряемая интегральная схема;
3 - источник питания; 4 - цепь нагрузки на выходе
Черт.41
с) Описание схемы и требования к ней
Цепь управления на входе синхронизации, условия на других входах и цепь нагрузки на выходе должны соответствовать заданным требованиям. Цепь управления на входе синхронизации и ее источник питания должны обеспечивать всю мощность, необходимую для управления входом синхронизации. Эта цепь работает как преобразователь мощности и должна обладать малой собственной потребляемой мощностью. Выходное полное сопротивление цепи управления на входе синхронизации должно быть достаточно низким, чтобы нагрузка измеряемой схемы не влияла на форму выходного сигнала цепи управления на входе синхронизации. На черт.42 и 43 даны примеры соответствующих цепей управления на входе синхронизации.
|
|
Полное сопротивление конденсатора должно быть низким на частоте измерения.
Емкости и
включают паразитные емкости измерительного оборудования, и должны соответствовать заданным значениям. Форма синхронизирующего импульса на выходе цепи управления входом синхронизации должна соответствовать заданной. Для соблюдения этого условия используют осциллограф.
Для того чтобы было возможно провести два измерения мощности, потребляемой цепью управления на входе синхронизации, измеряемую схему включают посредством выключателя .
Амперметр должен быть таким, чтобы с его помощью можно было измерить средний суммарный ток, потребляемый цепью управления на входе синхронизации.
Вольтметр должен быть таким, чтобы с его помощью можно было измерить напряжение на выходе источника питания.
Если требуются два или более синхронизирующих импульса, то оговаривается взаимосвязь между ними, а измерения проводят для каждой из цепей синхронизации в отдельности.
d) Меры предосторожности
Особых мер предосторожности не требуется.
e) Методика измерения
Устанавливают заданное значение температуры.
Интегральную схему подключают в схему измерения; устанавливают заданные значения напряжения питания и условия на других входах.
Цепь управления на входе синхронизации и генератор импульсов настраивают таким образом, чтобы получить требуемый импульс.
Для контроля формы импульса используют осциллограф.
Постоянный ток , протекающий по цепи управления на входе синхронизации, измеряют при разомкнутом выключателе
. Затем выключатель
замыкают и измеряют ток
. Мощность, необходимую для управления измеряемой схемы, вычисляют по формуле
![]() .
.
f) Заданные условия
Температура окружающей среды или в контрольной точке схемы.
Напряжение питания (включая ).
Характеристики цепи управления на входе синхронизации и цепи нагрузки на выходе.
Характеристики синхронизирующего импульса:
- амплитуда;
- длительность;
- время нарастания;
- время спада;
- коэффициент заполнения (50%, если не оговорено иное);
- диапазон частоты повторения;
- взаимосвязь между различными импульсами (при необходимости);
- значения и
.
- условия на других входах.
3. Входное и выходное полные сопротивления (6), (11)
3.1. Измерение по току: входная и выходная емкости в режиме большого сигнала (6)
a) Цель
Измерение в режиме большого сигнала входной и выходной емкостей цифровой интегральной схемы в заданных условиях.
Примечание. Данный метод может быть непригоден для измерения входной и выходной емкостей интегральной схемы, имеющей очень низкое шунтирующее сопротивление на входе или выходе.
b) Схема измерения
1 - цепь управления на входе; 2 - источник питания; 3 - прибор для измерения тока;
4 - токочувствительный элемент; 5 - измеряемая интегральная схема
Черт.44
Форма сигнала измеряемого тока
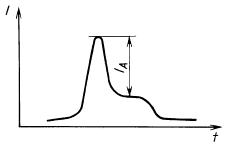
Черт.45
с) Описание схемы и требования к ней
Данный метод заключается в подборе такого конденсатора, с помощью которого для формы сигнала подаваемого напряжения можно получить ту же характеристику пикового тока, что и при входной (выходной) емкости измеряемой интегральной схемы.
Генератор импульсов обеспечивает подачу сигнала переключения заданной формы. Пиковый ток измеряют с помощью прибора для измерения тока, как показано на черт.45.
Время переключения управляющего импульса, поданного на измеряемую интегральную схему, должно быть не менее
![]() ,
,
где - минимально возможное значение измеряемой емкости;
- заданная амплитуда напряжения управляющего импульса;
- максимальное заданное значение постоянного тока на измеряемом выводе.
Выходное полное сопротивление цепи управления на входе должно быть достаточно низким, чтобы в пределах измеряемой емкости увеличение приложенной к измеряемому выводу емкости в два раза изменяло время перехода на измеряемом выводе не более чем на 5%.
Входное полное сопротивление прибора для измерения тока должно быть низким по сравнению с входным (выходным) полным сопротивлением измеряемой схемы.
d) Меры предосторожности
Особых мер предосторожности не требуется.
e) Методика измерения
Устанавливают заданное значение температуры.
Интегральную схему подключают в схему измерения и устанавливают заданные значения напряжения(ий) питания.
Устанавливают заданные значения управляющего напряжения и условия на других выводах. На измеряемый вывод подают управляющий импульс и устанавливают его заданную амплитуду.
Измеряют значение пикового тока , как показано на черт.45.
Интегральную схему отключают из схемы измерения.
Емкость конденсатора, который дает такое же значение пикового тока , определяют методом замещения.
f) Заданные условия
Температура окружающей среды или в контрольной точке схемы.
Напряжение(я) питания.
Характеристики управляющего импульса на измеряемом выводе:
- амплитуда;
- длительность;
- время нарастания;
- время спада;
- частота повторения;
- условия на других выводах.
3.2. Измерение по напряжению (эквивалентные входная и выходная емкости, эквивалентные входное и выходное сопротивления) (11)
Используют два метода измерения:
- один основан на методе измерения напряжения в режиме большого сигнала;
- другой основан на мостовом методе измерения в режиме малого сигнала.
Примечания:
1. Предпочтение отдают методу измерения в режиме большого сигнала.
2. При указании значений этих параметров следует оговорить используемый метод измерения.
3.2.1. Метод измерения в режиме большого сигнала
a) Цель
Измерение эквивалентных входной и выходной емкостей и/или эквивалентных входного и выходного сопротивлений цифровой интегральной схемы при переключении с одного определенного уровня на другой в заданных условиях.
Примечание. Возможно также измерение эквивалентной входной емкости или эквивалентной выходной емкости, если интегральная схема имеет входное или выходное сопротивление (соответственно), равное или меньше волнового сопротивления линии, используемой при данном методе. Только очень малое входное или выходное сопротивление будет шунтировать входную или выходную емкость, и, таким образом, измерение емкости станет невозможным. Однако в таком случае для практического применения емкость не важна, и вместо нее измеряют сопротивление.
b) Схема измерения
Измерение эквивалентной входной или выходной емкости и/или эквивалентного входного или выходного сопротивления интегральной схемы.
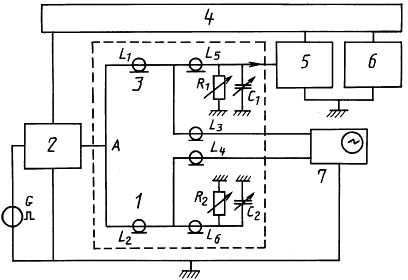
1, 3 - согласованное -образное соединение; 2 - цепь управления на входе; 4 - источник питания;
5 - измеряемая схема; 6 - дополнительная цепь нагрузки; 7 - осциллограф
Черт.46
c) Описание схемы и требования к ней
Генератор импульсов обеспечивает подачу сигнала переключения заданной формы. Время перехода должно быть приблизительно равно времени переходного процесса измеряемой интегральной схемы. Осциллограф должен обеспечивать измерение параметров импульса, а также изменений, вызванных измеряемой схемой.
Необходимо, чтобы длина была равна длине
,
![]() ,
, ![]() ,
, ![]() ;
; ![]() .
.
Длина линий передачи и
должна значительно превышать длину других линий, чтобы избежать перекрытия отражений, возникающих в точке
(черт.46), с отражениями, вызываемыми измеряемой схемой.
Волновые сопротивления линий ![]() должны быть равны, а
должны быть равны, а -образные соединения и входы осциллографа должны быть с ними согласованы.
Провода, соединяющие ,
и
,
, должны быть, по возможности, короткими и одинаковой длины, чтобы нежелательные индуктивности были низкими или, по крайней мере, приблизительно равными.
d) Меры предосторожности
Во избежание перекрытия ответного сигнала срабатывания (интегральной схемы) передаваемым импульсом удвоенное время задержки переключения в линиях ![]() (или
(или ![]() ) должно быть значительно больше времени нарастания или времени спада импульса в точке
) должно быть значительно больше времени нарастания или времени спада импульса в точке .
e) Методика измерения
Устанавливают заданное значение температуры.
Генератор импульсов, цепь управления на входе и осциллограф подсоединяют к передающей линии через
, как показано на черт.46. Заданную амплитуду напряжения, а также время нарастания или спада входного импульса устанавливают с помощью цепи управления на входе.
Частота импульсов должна быть такой, чтобы интервалы времени между двумя последовательными фронтами нарастания или спада не были полностью пропорциональны времени задержки переключения соответственно по линиям ![]() или
или ![]() .
.
С помощью резисторов и
и конденсаторов
и
схему измерения балансируют таким образом, чтобы совпадали обе осциллограммы. Значения
и
устанавливают относительно высокими (например, для ТТЛ-схем приблизительно 5 кОм), а
и
- на самые низкие допустимые значения (например, приблизительно от 1 до 2 пФ).
Затем интегральную схему подсоединяют к линии , вызывая отражение, при котором одна из осциллограмм не совпадает с другой. Совпадение осциллограмм восстанавливают путем изменения
и
.
Изменения или
представляют собой эквивалентную емкость или эквивалентное сопротивление соответственно.
Осциллограммы, не совпадающие из-за нарушения баланса измеряемой схемы (штриховой линией показано восстановление баланса с помощью и
).
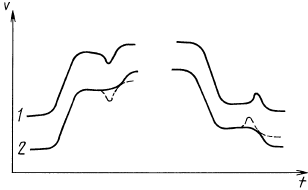
Черт.47
f) Заданные условия
Температура окружающей среды или в контрольной точке схемы.
Напряжение питания и условия на других выводах.
Характеристики входного импульса:
- амплитуда выше и ниже заданного контрольного уровня;
- длительность;
- время нарастания;
- время спада;
- частота повторения;
- направление перехода между заданными уровнями;
- значения сопротивлений и
.
3.2.2. Мостовой метод (в режиме малого сигнала)
а) Цель
Измерение входной или выходной емкости интегральной схемы в заданном режиме малого сигнала.
b) Схема измерения
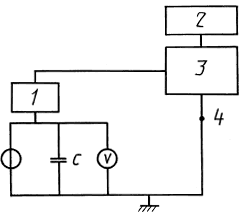
1 - высокочастотный мост; 2 - источник питания; 3 - измеряемая интегральная схема; 4 - контрольная точка
Черт.48
c) Описание схемы и требования к ней
Высокочастотный мост должен иметь низкое внутреннее сопротивление по постоянному току и обладать способностью выдерживать необходимый постоянный ток на измеряемом входе или выходе, не влияя на точность измерения. Можно также использовать другие методы подачи смещения на схему. Следует соблюдать условия измерения в режиме малого сигнала.
Если не оговорено иное, конденсатор должен представлять собой цепь короткого замыкания на частоте измерения, равной 1 МГц.
d) Меры предосторожности
Особых мер предосторожности не требуется.
e) Методика измерения
Устанавливают заданное значение температуры, которое контролируют непосредственно до и после измерения. Интегральную схему изымают из схемы измерения и высокочастотный мост балансируют; устанавливают заданное значение входного напряжения.
Интегральную схему вновь подключают в схему измерения; проверяют входное напряжение и вновь балансируют высокочастотный мост.
Разность между двумя показаниями высокочастотного моста и является входной или выходной емкостью.
f) Заданные условия
Температура окружающей среды или в контрольной точке схемы.
Входное напряжение.
Напряжение питания.
Частота измерения (если она не равна 1 МГц).
Условия на других выводах.
4. Время, характеризующее схему
4.1. Время задержки переключения (3), (7)
4.1.1. Биполярные схемы (3)
a) Введение
Приведенный ниже метод измерения применим для комбинаторных и последовательностных биполярных цифровых схем, за исключением быстродействующих схем, в которых для соединений схем необходимы согласованные шины передачи и определенные оконечные устройства.
b) Цель
С помощью данного метода определяют значения времени задержки переключения для инвертирующих и неинвертирующих схем, если к их входам и выходам подсоединены определенные интегральные схемы или их эквиваленты.
с) Схема измерения
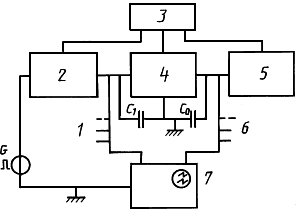
1 - (-1) цифровые схемы или цепи нагрузки на входе; 2 - цифровая схема управления;
3 - источник питания; 4 - измеряемая интегральная схема; 5 - цифровая схема нагрузки;
6 - (-1) цифровые схемы или цепи нагрузки на выходе; 7 - двухлучевой осциллограф
Черт.49
d) Описание схемы и требования к ней
Интегральные схемы, которые используют в цепи управления на входе и в цепи нагрузки на входе и выходе, должны обладать типовыми характеристиками интегральных схем, предназначенных для подсоединения к измеряемой интегральной схеме.
Должно быть указано число схем нагрузки, управляемых параллельно схемой управления () и измеряемой интегральной схемой (
), выбранное специально для наиболее неблагоприятных условий для каждого измеряемого времени.
Схемы, используемые для цепей нагрузки на входе и выходе, должны отвечать требованиям ТУ в части остальных характеристик, включая измерение времени задержки и времени перехода в соответствии с методами, изложенными в п.4.2. Вместо цепей нагрузки на входе и выходе могут быть использованы эквивалентные схемы при условии, что это соответствие может быть проверено.
Входное полное сопротивление осциллографа должно быть высоким по сравнению с входным и выходным полными сопротивлениями измеряемой интегральной схемы. При необходимости вместо осциллографа можно использовать другой эквивалентный прибор для измерения времени.
Входная и выходная емкости и
должны включать все паразитные емкости, вносимые монтажными приспособлениями и измерительными приборами, однако не должны включать паразитных емкостей измеряемой интегральной схемы и цепей нагрузки на входе и выходе. Если длина соединений может вносить дополнительную индуктивность, следует привести подробные сведения о монтаже.
Осциллограф не должен обладать значительной дифференциальной задержкой.
е) Методика измерения
Время задержки переключения определяют непосредственно по форме сигналов на экране осциллографа, как показано, например, на черт.50, который приведен для инвертирующей схемы в качестве примера.
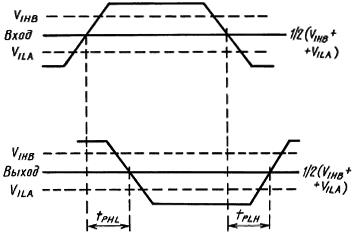
Черт.50
f) Заданные условия
Температура окружающей среды или в контрольной точке схемы.
Напряжение(я) питания.
Типы цепей управления на входе и цепей нагрузки на входе и выходе или конфигурация схемы и значения параметров компонентов эквивалентных схем нагрузки.
Характеристики входных импульсов:
- значение напряжения высокого и низкого уровней в пределах диапазонов высокого и низкого уровней, соответственно;
- длительность;
- время нарастания;
- время спада;
- частота повторения;
- условия на других выводах;
- емкости и
;
- значения и
.
4.1.2. МОП-схемы (7)
а) Цель
Измерение времени задержки переключения МОП-схем при переходе на выходе от состояния определенного высокого уровня к состоянию определенного низкого уровня или наоборот в заданных условиях управления на входе и нагрузки на выходе.
Данный метод применим к любым схемам, в которых изменение состояния на выходе вызывается подачей заданного сигнала на заданный вход.
Примечание. Данный метод применим также для измерения времени перехода для МОП-интегральных схем.
b) Схема измерения
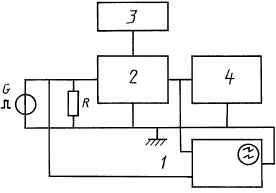
1 - двухлучевой осциллограф; 2 - измеряемая интегральная схема;
3 - источник питания; 4 - цепь нагрузки на входе
Черт.51
Примеры цепей нагрузки на входе
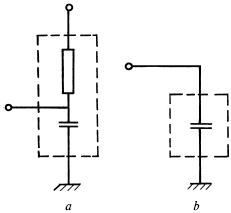
Черт.52
c) Описание схем и требования к ней*
________________
* Текст соответствует оригиналу. - .
Генератор импульсов должен подавать импульсы с заданным временем нарастания и спада. Форма входного сигнала и резистор должны соответствовать установленным требованиям.
Цепь нагрузки на выходе должна состоять из пассивных линейных компонентов (см. в качестве примера черт.52).
Входное полное сопротивление осциллографа должно быть высоким по сравнению с входным и выходным полным сопротивлениями измеряемой интегральной схемы. Вместо осциллографа можно использовать другой эквивалентный прибор для измерения времени. Осциллограф не должен вносить значительной дифференциальной задержки.
Емкость нагрузки должна включать все паразитные емкости, вносимые монтажными приспособлениями и измерительными приборами, но не должна включать паразитных емкостей измеряемой интегральной схемы.
Если длина соединений может вносить дополнительную индуктивность, следует приводить подробные сведения о монтаже.
d) Методика измерения
Время задержки переключения определяют непосредственно по форме сигналов на экране осциллографа, как показано, например, на черт.53.
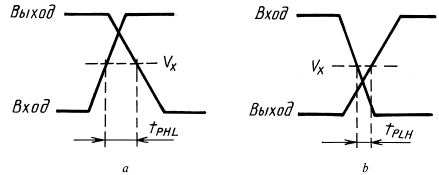
Данные чертежи приведены в качестве примера только для инвертирующих схем.
Черт.53
e) Заданные условия
Температура окружающей среды или в контрольной точке схемы.
Напряжение(я) питания.
Конфигурация схемы и значения параметров компонентов цепи нагрузки на выходе, включая паразитные емкости.
Характеристики входных импульсов:
- значения напряжения высокого и низкого уровней в пределах диапазонов высокого и низкого уровней соответственно;
- длительность;
- время нарастания;
- время спада;
- частота повторения;
- значение сопротивления ;
- условия на других выводах;
- значение напряжения .
4.2. Время задержки и время перехода (4), (5)
4.2.1. Биполярные схемы (4)
a) Введение
Приведенный ниже метод измерения применим для комбинаторных и последовательностных цифровых биполярных схем, за исключением быстродействующих схем, в которых для межсоединения схем необходимы согласованные шины передачи и определенные оконечные устройства.
b) Цель
С помощью данного метода определяют значения времени задержки и времени перехода для инвертирующих и неинвертирующих схем, если к их входам и выходам подсоединены заданные схемы.
с) Схема измерения
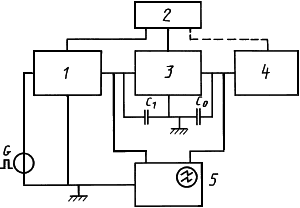
1 - цепь управления на входе; 2 - источник питания; 3 - измеряемая интегральная схема;
4 - цепь нагрузки на выходе; 5 - двухлучевой осциллограф
Черт.54
d) Описание схемы и требования к ней
Генератор импульсов, подсоединенный к цепи управления на входе, должен подавать на вход импульсы с заданными значениями времени нарастания и спада (в качестве примера см. черт.55).
Формы сигнала
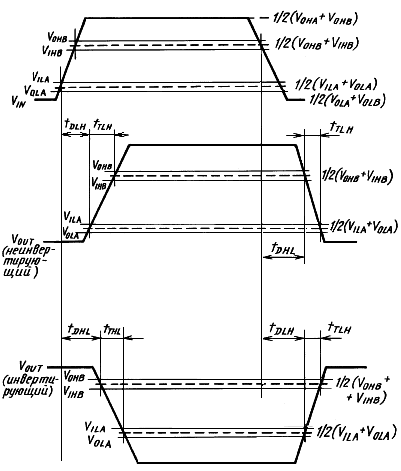
Черт.55
Уровни напряжения, представленные на черт.55, должны устанавливаться с помощью входных схем, управляющих эквивалентом нагрузки, который представляет собой типовую схему.
Если монтажное приспособление оказывает влияние на результат измерения, оно должно быть оговорено.
Входная и выходная емкости ( и
) должны включать все паразитные емкости цепей управления и нагрузки, а также паразитные емкости, вносимые монтажными приспособлениями и измерительными приборами, но не должны включать паразитных емкостей измеряемой интегральной схемы. При необходимости емкости
и
могут быть включены в цепь управления на входе и цепь нагрузки на выходе.
Входное полное сопротивление осциллографа должно быть высоким по сравнению с входным и выходным полными сопротивлениями измеряемой интегральной схемы или оно должно составлять часть полного сопротивления цепи управления на входе и цепи нагрузки на выходе. Вместо осциллографа можно использовать другой эквивалентный прибор для измерения времени.
Осциллограф не должен вносить значительной дифференциальной задержки.
e) Методика измерения
Время задержки и время перехода определяют по форме сигналов на экране осциллографа, как показано, например, на черт.55.
f) Заданные условия
Температура окружающей среды или в контрольной точке схемы.
Напряжение(я) питания.
Конфигурация цепи и значения параметров компонентов цепи управления на входе и цепи нагрузки на выходе.
Характеристики входных импульсов:
- значения напряжения высокого и низкого уровней (см. черт.55);
- длительность;
- время нарастания;
- время спада;
- частота повторения;
- условия на других выводах;
- емкости и
.
4.2.2. МОП-схемы (5)
Метод измерения, приведенный в п.4.1.2, используют для измерения времени перехода МОП-интегральных схем с учетом следующих изменений.
Форма сигнала
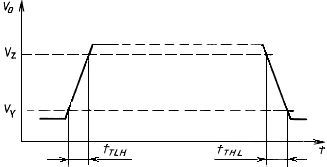
Черт.56
Заданные условия
Последнее заданное условие "- Значение напряжения " заменить на: "- Значение выходных напряжений
и
".
4.3. Время установления (8) и время удержания (9)
a) Цель
Измерение минимального времени установления и минимального времени удержания сигнала на подготовительном входе относительно триггерного входа последовательностной схемы, необходимых для правильного переключения схемы из одного состояния в другое.
Примечание. Последовательностная схема переключения в другое состояние на выходе, когда соответствующий сигнал, данный на подготовительный(е) вход(ы), совпадает с заданным уровнем и/или переходом сигнала, поданного на триггерный вход. Отказ переключения возникает в том случае, если длительность совпадения меньше значения, характерного для измеряемой схемы.
b) Описание схемы и требования к ней
Генератор(ы) импульсов должен(ны) подавать на выход два синхронизированных импульса, регулируемых по фазе относительно друг друга.
Для некоторых типов последовательностных схем (например, типа ) частота повторения запаздывающего импульса должна быть в два раза меньше частоты повторения опорного импульса. Это условие должно быть оговорено в ТУ на изделия конкретных типов; или же частота следования обоих импульсов должна быть одинаковой.
Подсоединение цепей управления и нагрузки должно производиться согласно тому, как это оговорено.
Свободные входы должны быть подсоединены, как оговорено.
c) Схема измерения
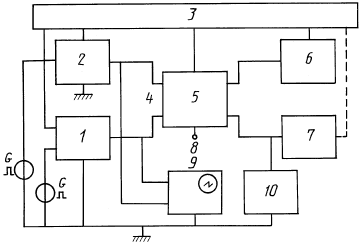
1, 2 - цепь управления; 3 - источник питания; 4 - входы; 5 - измеряемая интегральная схема;
6, 7 - цепь нагрузки; 8 - опорный вывод; 9 - осциллограф; 10 - детектор сигналов
Черт.57
Входные полные сопротивления осциллографа и детектора сигналов должны превышать полные сопротивления в точках измерения на входе и выходе. Вместо осциллографа можно использовать эквивалентный прибор для измерения времени, который не должен вносить существенной дифференциальной задержки.
Детектор сигнала должен быть снабжен либо осциллографом, либо иным прибором, способным указывать на наличие переключения измеряемого выхода последовательностной схемы в одно из двух ее состояний. Такой прибор должен также быть способен на то, что при каждом переходе сигнал на выходе не превышает предельно допустимых значений для и
.
Осциллограф и детектор сигнала должны быть синхронизированы одним из входных импульсов, обычно пусковым импульсом.
d) Меры предосторожности
Следует избегать применения входного сигнала с коэффициентом заполнения 50%, поскольку в этом случае у определенных типов последовательностных схем недостаточное время установления или удержания может не обеспечить прекращения переключения и привести только к изменению фазы выходного сигнала.
e) Методика измерения
Интегральную схему подключают в схему измерения, устанавливают заданные значения напряжения питания и входного напряжения.
Устанавливают заданное значение температуры, которое проверяют непосредственно до и после измерения.
Выходные сигналы генератора импульсов регулируют таким образом, чтобы на входе измеряемой интегральной схемы создать заданные характеристики импульсов.
Время задержки, измеренное между заданными уровнями, находящимися в пределах и
(для биполярных схем предпочтителен уровень 50%) при заданных переходах подготовительных и пусковых импульсов увеличивается (или уменьшается) от нуля. За выходом последовательностной схемы наблюдают, чтобы зарегистрировать момент переключения; должна быть оговорена зависимость между частотами на входе и выходе.
Измеряют соответствующее время задержки.
В результате измерения получают либо минимальное время установления, либо минимальное время удержания в зависимости от того, какую пару переходов выбирают (см. черт.58 и 59).
Время установления | Время удержания |
|
|

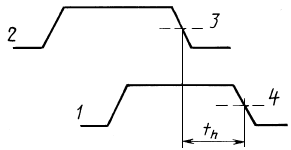
f) Заданные условия
Температура окружающей среды или в контрольной точке схемы.
Напряжение(я) питания.
Характеристики входных импульсов:
- амплитуда;
- длительность;
- время нарастания;
- время спада;
- частота повторения;
- время задержки между входными импульсами, при необходимости;
- направление переходов входных сигналов;
- цепь(и) нагрузки как на измеряемых, так и на неизмеряемых выходах;
- цепь(и) управления на входе, при необходимости;
- условия на других выводах;
- последовательность и формы сигналов на других выводах входа.
4.4. Время обращения (36)
а) Цель
Измерение минимального времени обращения, необходимого для правильного переключения.
b) Схема измерения
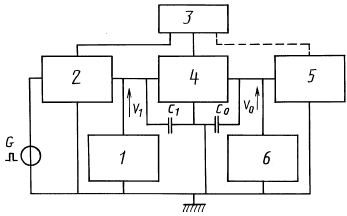
1 - прибор для измерения времени; 2 - цепь управления; 3 - источник питания; 4 - измеряемая
интегральная схема; 5 - цепь нагрузки; 6 - прибор для измерения напряжения
Черт.60
c) Описание схемы и требования к ней
Прибор для измерения времени должен обеспечивать измерение интервала времени между двумя последовательными переходами входного сигнала, поданными на один и тот же вывод входа. Уровень отсчета для измерения этого времени должен быть в пределах от до
. Кроме того, прибор для измерения напряжения должен обеспечивать измерение выходного напряжения измеряемой схемы. Генератор импульсов должен обеспечивать подачу импульсов с регулируемыми коэффициентом заполнения и частотой.
Схема измерения должна обеспечивать на других выводах входа и выхода соответствующие заданные напряжения и нагрузки. Система измерения должна обеспечивать заданный температурный режим измеряемой схемы.
d) Меры предосторожности
Особых мер предосторожности не требуется.
e) Методика измерения
Измеряемую интегральную схему подключают в схему измерения; на других выводах устанавливают заданное значение напряжения питания.
Устанавливают заданное значение температуры, проверяемое до и после измерения.
Генератор импульсов регулируют таким образом чтобы обеспечивать на входе измеряемой схемы заданные напряжения, а также заданное время нарастания и спада.
Примечание. Как правило, амплитуда входного импульса должна находиться в пределах от до
.
С помощью дальнейшей регулировки генератора и при сохранении постоянного значения длительность входного импульса
регулируют до тех пор, пока выходной сигнал соответствующего уровня не достигнет значения
или
; или при сохранении постоянного значения
длительность входного импульса
регулируют до тех пор, пока выходной сигнал соответствующего уровня не достигнет значения
или
.
Измеренная длительность входного импульса (или
) является минимальным временем обращения для заданной длительности
(или
) (см. черт.61).
Время сообщения
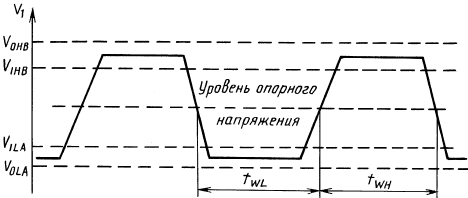
![]() (при заданном
(при заданном );
![]() (при заданном
(при заданном ).
Черт.61
f) Заданные условия
Температура окружающей среды или в контрольной точке схемы.
Напряжение(я) питания.
Цепь управления на входе, при необходимости, или полное сопротивление на выходе генератора импульсов.
Характеристики входных импульсов:
- амплитуда;
- длительность и/или
;
- время нарастания;
- время спада;
- уровень отсчета для и
;
- цепь(и) нагрузки на выходе;
- условия на других выводах;
- соотношение между частотами на входе и выходе;
- входная и выходная емкости и
, включая паразитные емкости, вносимые монтажными приспособлениями и измерительными приборами;
- значения или
.
4.5 Время разрешения и время запрещения на выходе (для выходов с тремя состояниями) (49)
a) Цель
Измерение времени разрешения и времени запрещения на выходе цифровой интегральной схемы, имеющей выходы с тремя состояниями.
b) Схема измерения
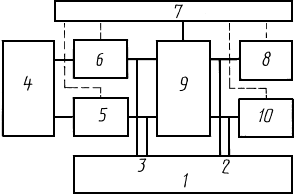
1 - прибор для измерения напряжения и времени; 2 - измерение на выходе; 3 - измерение на входе;
4 - генератор импульсов; 5 - цепи на входе от 2 до ; 6 - цепь на входе 1; 7 - источники питания;
8 - цепь на выходе 1; 9 - измеряемая схема; 10 - цепь на выходе от 2 до
Черт.62
c) Описание схемы и требования к ней
На входы, управляющие состоянием на выходе, а также на остальные входы подают соответствующие импульсы. Следует также обеспечивать измерение временных соотношений сигналов при заданных уровнях опорного напряжения.
В схеме измерения должны быть предусмотрены соответствующие нагрузки на измеряемом(ых) входе(ах).
На черт.64 представлена соответствующая цепь нагрузки для ТТЛ-логики. Кроме того, следует обеспечивать соответствующие уровни напряжения и нагрузки на остальных выводах, а также поддерживать заданную температуру измеряемой схемы.
Примечание. Для определения трех различных состояний на выходе с тремя состояниями (высокого уровня, низкого уровня и состояние высокого полного сопротивления) на выходе должно быть состояние высокого полного сопротивления, если уровень напряжения на этом выходе противоположен уровню напряжения на выходе, когда из него подан сигнал разрешения. Этот уровень напряжения задается цепью нагрузки.
d) Методика измерения
Устанавливают заданное значение температуры, которое проверяют непосредственно до и после измерения. Входные и выходные выводы, а также все остальные выводы подсоединяют, как оговорено в ТУ на изделия конкретных типов. Источники тока подсоединяют, как оговорено в ТУ на изделия конкретных типов (например, в заданной последовательности).
Генератор импульсов регулируют таким образом, чтобы на вход(ы) измеряемой схемы подавались импульсы заданной амплитуды, длительности и частоты повторения.
Время разрешения на выходе (см. черт.63) измеряют как интервал времени между переходом сигнала разрешения на выходе из неактивного в активное состояние и переходом на выходе из состояния высокого полного сопротивления в состояние высокого уровня (
-уровня) или низкого уровня (
-уровня).
Время запрещения на выходе измеряют как интервал времени между переходом сигнала разрешения на выходе из активного в неактивное состояние и переходом на выходе из состояния высокого или низкого уровня в состояние высокого полного сопротивления .
Все измерения проводят при заданных уровнях опорного напряжения.
Примечание. Поскольку переходы могут иметь различную длительность, может возникнуть необходимость определить два времени разрешения и два времени запрещения (переход от к
, от
к
и от
к
, от
к
).
e) Заданные условия
Температура окружающей среды или в контрольной точке схемы ( или
).
Напряжение(я) питания.
Характеристики входного импульса:
- время нарастания ;
- время спада ;
- амплитуда;
- частота повторения;
- время установления и удержания, при необходимости;
- длительность;
- цепи на входе;
- цепи на выходе и цепи нагрузки, включая емкость нагрузки (
включает в себя паразитные емкости);
- условия на других выводах;
- уровни опорного напряжения при измерении временных параметров.
Измерение времени разрешения и запрещения на выходе
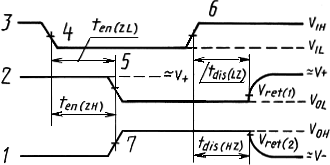
1 - форма сигнала 2 на выходе; 2 - форма сигнала 1 на выходе; 3 - управление выходом
(переход к состоянию низкого уровня); 4, 5, 6, 7 - опорное напряжение
![]() или
или ![]() - время разрешения на выходе;
- время разрешения на выходе; ![]() или
или ![]() - время запрещения
- время запрещения
на выходе; или
![]() - опорное напряжение для времени запрещения на выходе
- опорное напряжение для времени запрещения на выходе
при переходе из состояния низкого (или высокого) уровня в состояние высокого полного
сопротивления; или
- выходное напряжение в установившемся режиме
при переходе выхода из состояния низкого (или высокого) уровня
в состояние высокого полного сопротивления
Черт.63
Примечание. Форма сигнала 1 на выходе такова, что при соответствующих внутренних условиях на выходе будет состояние низкого уровня, если только на выход не будет подан сигнал запрещения. Форма сигнала 2 на выходе такова, что при соответствующих внутренних условиях на выходе будет состояние высокого уровня, если только на выход не будет подан сигнал запрещения.
Пример цепи нагрузки на выходе для ТТЛ-схемы
и эквивалентной логической схемы
|
|
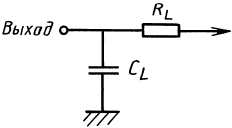
Черт.64
4.6. Временные параметры, характеризующие интегральные схемы запоминающих устройств (50)-(54)
Общие положения
Приведенные ниже методы измерений могут использоваться для установления значений характеристик для интегральных схем ЗУ. Их можно применять при автоматических испытаниях: рассматривать в качестве контрольных методов, а также для определения точного значения той или иной характеристики.
а) Цель
Измерение следующих динамических характеристик и временных параметров ячейки памяти ЗУ:
- времени выборки адреса;
- времени выборки кристалла;
- времени выборки считывания;
- времени восстановления сигнала записи;
- минимальной длительности импульса записи.
b) Схема измерения
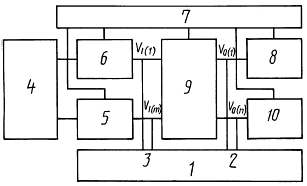
1 - аппаратура для измерения напряжения и времени; 2 - измерение на выходе; 3 - измерение на входе;
4 - генератор импульсов; 5 - цепь на входе ; 6 - цепь на входе 1; 7 - источник питания;
8 - цепь на выходе 1; 9 - измеряемая интегральная схема; 10 - цепь на выходе
Черт.65
Примечание. Если имеются общие выводы для входа и выхода, необходимо предусмотреть схемы развязки для входа и выхода.
c) Описание схемы и требования к ней.
Измерительная аппаратура должна обеспечивать импульсы и конфигурации импульсов для входов адреса, входов информации, а также для всех других заданных входов. Временные соотношения сигналов должны измеряться при заданных опорных напряжениях.
Кроме того, аппаратура должна обеспечивать напряжения и нагрузки на других выводах, а также соответствующие развязки для схем с общими выводами для входа и выхода.
d) Методика измерения
Схема измерения представлена на черт.65. Должна быть установлена заданная температура измеряемой схемы. Входные и выходные выводы так же, как и остальные выводы подключают согласно ТУ на изделия конкретных типов. Источник питания подключают, как оговорено (например, в заданной последовательности).
Генератор импульсов регулируют для получения заданных характеристик импульса: амплитуды, длительности, частоты повторения; времени задержки: нарастания и спада на входе измеряемой схемы.
d1) Измерение времени выборки адреса (50)
С помощью генератора импульсов заданная информация записывается в ячейки памяти, используемые при измерении.
Во время последующего считывания следует изменить сигнал адреса, чтобы он переместился из одного определенного местоположения в ячейке в другое, причем эти два местоположения должны содержать дополнительную информацию.
Все остальные входные сигналы, необходимые для считывания из запоминающего устройства, должны подаваться значительно раньше, чтобы не оказывать влияния на время выборки адреса. Это время измеряют как интервал от момента изменения адреса до момента получения достоверной информации на выходе; измерение осуществляют при заданных значениях опорного напряжения (см. черт.66).
Измерение времени выборки адреса
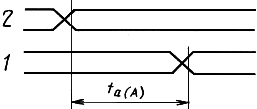
1 - информация на выходе; 2 - адрес; - время выборки адреса
Черт.66
d2) Измерение времени выборки кристалла (51)
С помощью генератора импульса заданная информация записывается в ячейки памяти, используемые при измерении.
Все остальные входные сигналы, необходимые для считывания из ЗУ, должны подаваться значительно раньше, чтобы не оказывать влияния на время выборки разрешения и/или выбора кристалла. Это время представляет собой интервал от момента, когда сигнал разрешения и/или выбора переходит из неактивного в активное состояние, до момента получения достоверной информации на выходе; измерение осуществляют при заданных значениях опорного напряжения (см. рис.67).
Измерение времени выборки разрешения и/или выбора
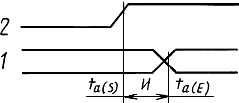
1 - информация на выходе; 2 - разрешение и/или выбор; и
- время выборки разрешения и/или выбора
Черт.67
d3) Измерение времени выборки считывания
С помощью генератора импульсов заданная информация записывается в ячейки памяти, используемые при измерении.
Примечание. Данный метод применяют только для ЗУ с раздельными выводами входа и выхода.
Измерение проводят в два этапа:
а) в ячейку памяти записывается один бит информации;
b) при считывании такой бит информации должен вызывать изменение на выходе.
Время выборки считывания измеряют как интервал от момента перехода от записи к считыванию до момента получения достоверной информации на выходе (см. черт.68).
Измерение времени выборки считывания
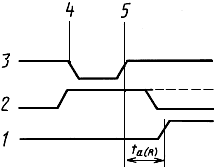
1 - информация на выходе; 2 - информация на входе; 3 - запись ()/считывание (
);
4 - этап а): запись; 5 - этап b): считывание; - время выборки считывания
Черт.68
d4) Измерение времени восстановления сигнала записи (53)
С помощью генератора импульсов заданная информация записывается в ячейки памяти, используемые при измерении.
Примечание. Метод применяют только для ЗУ с раздельными выводами входа и выхода.
Длительность импульса записи увеличивают от минимального гарантированного значения. Необходимо наблюдать за выходом прибора и регистрировать момент, когда записанная информация вызывает ошибку в последующем цикле считывания (т.е. несоответствие значения на выходе).
Время восстановления сигнала записи измеряют как интервал от момента окончания импульса записи до начала следующего цикла (например, изменение адреса) при заданном контрольном уровне.
Примечание. Следует подавать все остальные сигналы, необходимые для правильной работы ЗУ в режиме считывания, что дает запас во времени для заданных временных требований, достаточный для того, чтобы не оказывалось влияния на результат измерения.
Типовые формы сигнала приведены на черт.69.
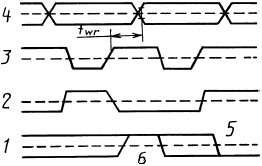
1 - информация на выходе; 2 - информация на входе; 3 - запись ()/считывание (
); 4 - адрес;
5, 6 - достоверная информация; - время восстановления сигнала записи
Черт.69
Измерение времени восстановления сигнала записи, если начало следующего цикла вызывается изменением адреса.
d5) Измерение минимальной длительности (ширины) импульса записи (54)
С помощью генератора импульсов заданная информация записывается в ячейки памяти, используемые при измерении.
Измерение проводят в три этапа:
а) в ячейку записывают информацию согласно ТУ на изделия конкретных типов;
b) в ячейку вновь записывают заданную дополнительную информацию;
c) информация считывается и сравнивается с информацией, записанной на этапе b).
Эти три этапа повторяют, причем на этапе b) длительность (ширину) импульса уменьшают, пока на этапе с) не исчезнет идентичность при сравнении информации. Затем длительность импульса увеличивают до тех пор, пока совпадения не будет вновь. Эта длительность (ширина) импульса и будет "минимальной длительностью (шириной) импульса записи" (см. черт.70).
Измерение минимальной длительности (ширины) импульса записи
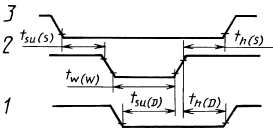
- длительность (ширина) импульса записи;
- время установления сигнала выбора кристалла
до сигнала записи; - время установления сигнала информации на входе до сигнала записи;
- время удержания сигнала выбора кристалла после сигнала записи;
- время удержания
сигнала информации на входе после сигнала записи; - информация на входе;
- запись;
- выбор кристалла (при необходимости)
Черт.70
Примечание. Время установления сигнала информации на входе вычисляют по фронту спада импульса записи (как показано на черт.70) для ЗУ, запоминающие элементы которых представляют собой "прозрачные" фиксаторы. Для ЗУ, запоминающие элементы которых представляют собой фиксаторы с запуском при переходе, это время вычисляют по фронту импульса записи.
Все остальные сигналы (например, выбора кристалла и информации на входе), необходимые для осуществления записи, подают таким образом, чтобы не нарушить операцию записи.
е) Заданные условия
Температура окружающей среды или в контрольной точке схемы ( или
).
Напряжение(я) питания.
Конфигурация и последовательность входных импульсов, включая требования к временным соотношениям например: время цикла, время установления и время удержания.
Характеристики входных импульсов, включая время нарастания, время спада и амплитуду:
- входные и выходные цепи (включая паразитные емкости);
- условия на других выводах;
- содержимое выбранной(ых) ячейки (ячеек) памяти;
- адрес выбранной(ых) ячейки (ячеек) памяти;
- последовательность адресов, при необходимости.
5. Частота переключения последовательностной схемы (10)
a) Цель
Определить, находится ли максимальная (минимальная) частота переключения последовательностной схемы выше (ниже) заданного предельного значения.
b) Схема измерения
См. черт.60.
c) Описание схемы и требования к ней
Последовательностная схема, которая, в частности, может быть бистабильной схемой, счетчиком или регистром сдвига, должна переключаться из одного состояния на выходе в другое, если:
1) соответствующий(е) пусковой(ые) импульс(ы) отсутствовал(и) в течение определенного периода времени, а затем
2) соответствующий(е) пусковой(ые) импульс(ы) подается(ются) в течение определенного периода времени.
Эти два периода времени необязательно должны быть равными. Отсутствие переключения на максимальной частоте будет наблюдаться в том случае, если сумма этих двух периодов времени в любом одиночном цикле падает ниже значения, определяющего этот параметр при максимальной для данной интегральной схемы частоте.
Точно так же отсутствие переключения наблюдается в том случае, если один из этих периодов времени превышает значения, определяющие этот параметр на частоте, минимальной для данной интегральной схемы.
Для последовательностных схем определенных типов может потребоваться дополнительная подача сигналов. Эти дополнительные сигналы следует синхронизировать с основными сигналами и установить для них соответствующее время задержки; они должны также иметь частоту повторения, кратную частоте основных импульсов.
Подсоединение цепи нагрузки как на измеряемых, так и на неизмеряемых выходах, а также цепи управления должны соответствовать заданным, как оговорено.
Свободные входы следует подсоединять, как оговорено.
Детектор сигналов должен быть снабжен либо осциллографом, либо иным прибором, способным указывать на наличие переключения измеряемого выхода последовательностной схемы из одного состояния в другое на заданной частоте, соответствующей частоте пусковых импульсов. Детектор должен также указывать на то, что при каждом переходе сигнал на выходе не превышает предельных значений.
d) Меры предосторожности
Особых мер предосторожности соблюдать не требуется.
e) Методика измерения
Интегральную схему подключают в схему измерения; устанавливают заданные значения входного напряжения и напряжения питания.
Устанавливают заданное значение температуры, которое проверяют до и после измерения.
Выходные сигналы генератора импульсов регулируют таким образом, чтобы на входе измеряемой интегральной схемы получить сигнал с заданной амплитудой, длительностью и частотой(ами) повторения.
Любой другой генератор импульсов регулируют подобным же образом и устанавливают заданное значение времени задержки этого генератора.
Чтобы убедиться в том, что переключение произошло при заданной частоте на выходе, за выходом интегральной схемы следует наблюдать по детектору сигналов.
f) Заданные условия
Температура окружающей среды или в контрольной точке схемы
Напряжение(я) питания.
Характеристики входных импульсов:
- амплитуда;
- длительность;
- время нарастания;
- время спада;
- частота повторения;
- время задержки между входными импульсами, при необходимости.
Направление переходов входных сигналов.
Цепь(и) нагрузки как на измеряемых, так и на неизмеряемых выходах.
Цепь(и) управления на входе, при необходимости.
Частота повторения сигнала на выходе.
Условия на других выводах.
Последовательность и форма сигналов на других выводах входа.
Глава V. ПРИЕМКА И НАДЕЖНОСТЬ
Раздел I. ЭЛЕКТРИЧЕСКИЕ ИСПЫТАНИЯ НА СРОК СЛУЖБЫ
1. Общие требования
См. п.2 ГОСТ 29106 (МЭК 748-1), гл.VIII, разд.III.
2. Специальные требования
2.1. Перечень испытаний на срок службы
Приводится перечень испытаний на срок службы для следующих подклассов цифровых интегральных схем:
- логические схемы;
- последовательностные схемы;
- оперативные запоминающие устройства.
Для многофункциональных приборов заданные выходные характеристики измеряют для каждого из связанных входов. Для приборов с дополнительными контрольными выводами (например, с выводами установки и сброса, выводами разрешения) измерения на заданных выходах следует проводить, по меньшей мере, один раз для каждой функции, управляемой этими выводами.
Для комплексных схем, которые не подвергают полным функциональным испытаниям, в данных по испытаниям должны быть указаны именно те функциональные испытания, которые проводятся.
2.2. Условия проведения испытаний на срок службы
Условия проведения испытаний и испытательные схемы для каждого класса приборов приведены в табл.II; если не оговорено иное, указанные испытания применимы для биполярных и МОП-схем.
Таблица II
Условия проведения испытаний на срок службы
Испытания | Классы или подклассы приборов | Условия испытаний | |
Температура | Рабочие условия | ||
В схеме кольцевого генератора при высокой температуре | Логические схемы |
| При испытании инвертирующих логических схем нечетные интегральные схемы соединяются последовательно, при этом выход последней схемы подсоединяется к выводу входа первой схемы, как показано на черт.71, чтобы вызвать опрокидывание фазы. При испытании неинвертирующих логических схем к каскадам неинвертирующих схем следует добавить инвертор, как показано на черт.72. В этом случае число неинвертирующих схем может быть как четным, так и нечетным |
На долговечность в динамическом режиме при высокой температуре | Логические схемы. Последовательностные схемы |
| Заданная(ые) последовательность(и) импульсов подается(ются) на заданные выводы входа. Условия на других выводах следует указать (см. черт.73) |
ОЗУ |
| Заданная(ые) последовательность(и) импульсов подается(ются) на заданные выводы входа. Условия на других выводах следует указать | |
На долговечность в статическом режиме при высокой температуре | Логические схемы. Последовательностные схемы, исключая |
| Заданные напряжения подаются на выводы входа. Условия на других выводах следует указать (см. черт.74) |
ОЗУ |
| Заданные напряжения подаются на соответствующие заданные выводы, чтобы записать заданную информацию, считать и сохранить ее | |
Кольцевой генератор для инвертирующих -схем
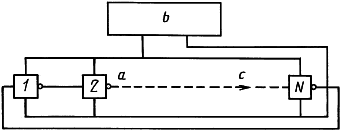
а - к входу схемы N 3; b - источник питания; с - выход схемы N (-1);
- нечетное число
Черт.71
Кольцевой генератор для неинвертирующих  -схем
-схем
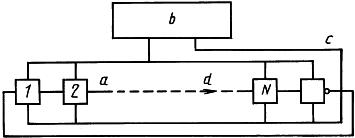
а - к входу N 3; b - источник питания; с - дополнительная инвертирующая логическая схема;
d - выход схемы N (-1);
может быть как четным, так и нечетным числом
Черт.72
Схема испытания на долговечность в динамическом режиме
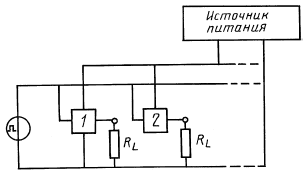
Черт.73
Схема испытания на долговечность в статическом режиме

Черт.74
В соответствующих ТУ на изделия конкретных типов должно быть указано, какие испытания следует проводить.
2.3. Критерии отказов и параметры-критерии годности при приемосдаточных испытаниях
Не допускается изменение предельно допустимых значений параметров (указанных в п.2.3.1 ГОСТ 29106 (МЭК 748-1), гл.VIII, разд.III).
2.4. Критерии отказов и параметры-критерии годности при испытаниях на надежность
На рассмотрении.
2.5. Процедура, которой необходимо следовать в случае ошибки во время испытаний
Если отказ прибора возник в результате ошибки во время испытаний (например, из-за неисправности испытательного или измерительного оборудования или ошибки оператора), то его зарегистрируют в протоколе испытания с указанием причины отказа.
Электронный текст документа
и сверен по:
М.: ИПК Издательство стандартов, 2004
{kind=link}