ГОСТ Р ИСО 9241-910-2015
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Эргономика взаимодействия человек-система
Часть 910
Основы тактильных и осязательных взаимодействий
Ergonomics of human-system interaction. Part 910. Framework for tactile and haptic interaction
ОКС 13.180
35.180
Дата введения 2016-12-01
Предисловие
1 ПОДГОТОВЛЕН Открытым акционерным обществом "Научно-исследовательский центр контроля и диагностики технических систем" (АО "НИЦ КД") на основе собственного аутентичного перевода на русский язык англоязычной версии международного стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 201 "Эргономика, психология труда и инженерная психология"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 8 октября 2015 г. N 1503-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 9241-910:2011* "Эргономика взаимодействия человек-система. Часть 910. Основы тактильных и осязательных взаимодействий" (ISO 9241-910:2011 "Ergonomics of human-system interaction - Part 910: Framework for tactile and haptic interaction").
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в ГОСТ Р 1.0-2012 (раздел 8). Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Тактильные и осязательные взаимодействия становятся все более важными в условиях работы с компьютерными системами, такими как специализированные вычислительные среды (например, виртуальное моделирование) и вспомогательные технологии.
В различных исследованиях по данной тематике используется широкое разнообразие терминов, взглядов, программных и аппаратных объектов и взаимодействий. Это разнообразие может привести к серьезным трудностям в области эргономики, как для разработчиков, так и пользователей, применяющих тактильные/осязательные взаимодействия.
В настоящем стандарте представлен общий набор терминов, определений и описаний для различных понятий, связанных с проектированием и использованием тактильных/осязательных взаимодействий. Стандарт содержит основные рекомендации (в том числе ссылки на соответствующие стандарты) для разработки систем с применением тактильных/осязательных взаимодействий. Он также содержит обзор приложений, объектов, свойств и взаимодействий, основанных на тактильных/осязательных ощущениях.
1 Область применения
Настоящий стандарт обеспечивает основу для понимания тактильных/осязательных взаимодействий и взаимосвязи их различных аспектов. В нем определены термины, описаны структуры и модели, и даны пояснения, касающиеся других частей серии стандартов ИСО 9241-900. В нем также даны рекомендации по применению различных форм взаимодействия для различных задач пользователей.
Стандарт применим для всех типов интерактивных систем, предусматривающих использование тактильных/осязательных устройств и взаимодействий.
В стандарте в полной мере не рассмотрены вопросы кинестетических взаимодействий, например, не рассмотрены жесты. Однако стандарт может быть полезным для понимания таких взаимодействий.
2 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
2.1 осязание (haptics): Сенсорная и/или моторная (двигательная) активность, вызываемая раздражением рецепторов кожи, мышц, суставов и сухожилий.
Примечание - Осязание включает в себя кинестетику и ощущение прикосновения.
2.2 осязательный (haptic): Имеющий отношение к осязанию.
Примечание - Несмотря на то, что в большей части определений не делают различий между понятиями "осязательный" и "тактильный", исследователи и разработчики в области осязания используют термин "тактильный" только для обозначения осязательных ощущений, вызванных механическим воздействием на кожу. В стандартах серии ИСО 9241 термин "осязательный" охватывает все ощущения прикосновения, а термин "тактильный" используют в более узком значении. Кроме того, оба термина могут быть использованы вместе для упрощения поиска.
2.3 ощущение прикосновения (touch): Ощущение, вызываемое раздражением рецепторов кожи.
Примечание - Кожные рецепторы служат для восприятия прикосновений.
2.4 кожный (cutaneous): Имеющий отношение к коже.
Примечание - Кожные рецепторы реагируют на механические воздействия и изменения температуры.
2.5 тактильный (tactile): Имеющий отношение к ощущению прикосновения.
2.6 вибротактильное (воздействие) (vibrotactile): Воздействие на кожу, вызванное вибрацией.
Пример - В мобильном телефоне использовано вибротактильное воздействие (вибросигнал) для оповещения пользователя.
2.7 кинестетика (kinaesthesis): Сенсорная и моторная (двигательная) активность, вызываемая раздражением рецепторов (проприоцепторов) мышц, суставов и сухожилий.
________________
Проприоцепция, проприоцепторное восприятие - восприятие относительного положения смежных частей тела и величины усилий, используемых для передвижения. Противоположность экстеро- и интероцепции.
Примечание 1 - Кинестетика является двунаправленной и включает как восприятие воздействия, так и реакцию на него.
Примечание 2 - Рецепторы в мышцах, суставах и сухожилиях являются основой для формирования кинестетического восприятия.
Примечание 3 - Двигательная активность осуществляется посредством мышц, сухожилий и суставов.
2.8 кинестетический (kinaesthesis): Имеющий отношение к кинестетике.
Примечание 1 - В зависимости от положения, перемещения и сгибания суставов и при напряжении/расслаблении мышц возникают различные виды кинестетических ощущений.
Примечание 2 - Под видами кинестетических действий понимают перемещение, применение силы, поворот (вращение), а также сохранение определенного положения, перемещение и сгибание суставов.
Примечание 3 - Термин проприоцепция означает ощущение положения собственного тела и движения. Этот термин часто используют вместо термина "кинестетика", хотя последний больше относится к движению. Например, чувство равновесия в большей мере относится к проприоцепции, нежели к кинестетике.
________________
Проприоцепция, проприоцепторное восприятие - восприятие относительного положения смежных частей тела и величины усилий, используемых для передвижения. Противоположность экстеро- и интероцепции.
2.9 обратная связь по усилию (force feedback): Ответная реакция (устройства) на какое-либо действие или событие в виде силы, воздействующей на пользователя и воспринимаемой им.
Примечание - Несмотря на то, что в данном термине использовано словосочетание "обратная связь", это не обязательно предполагает наличие обратной связи.
2.10 иллюзия восприятия (perceptual illusion): Восприятие, не соответствующее физическим параметрам источника воздействия (раздражения).
2.11 сенсорная адаптация (sensory adaptation): Изменение во времени восприимчивости сенсорной системы к воздействию постоянного раздражителя.
2.12 (тактильная/осязательная) пространственная маскировка ((tactile/haptic) spatial masking): Эффект ухудшения восприятия цели, который возникает, когда отвлекающий раздражитель расположен в непосредственной пространственной близости от целевого раздражителя.
2.13 (тактильная/осязательная) временная маскировка ((tactile/haptic) temporal masking): Эффект ухудшения восприятия цели, который возникает, когда отвлекающий раздражитель появляется непосредственно до или сразу после целевого раздражителя.
2.14 тактильный/осязательный объект (tactile/haptic object): Компонент интерактивной системы, с которым пользователь может взаимодействовать с помощью осязания.
2.15 (тактильный/осязательный) элемент пользовательского интерфейса ((tactile/haptic) user interface element): Часть интерфейса пользователя, представленная в тактильной/осязательной форме.
2.16 (тактильная/осязательная) элементарная задача ((tactile/haptic) task primitive): Базовое действие пользователя, используемое для выполнения задач, для которых предназначено устройство.
2.17 тактильная метка (tactile label): Метка элемента пользовательского интерфейса, представленная в тактильной/осязательной модальности.
2.18 осязательная карта (tactile map): Карта, представленная в тактильной/осязательной модальности с возможностью ввода.
Примечание 1 - Возможность ввода включает в себя касание пальцем, прекращение касания или перемещение по карте для указания и выбора положения.
Примечание 2 - Осязательные карты часто используют, чтобы помочь слепым людям ориентироваться.
2.19 жесткость, твердость, эластичность (stiffness, hardness, elasticity): Свойства виртуального объекта, определяемые посредством осязательного отклика на взаимодействие с ним с силой перпендикулярной поверхности этого объекта.
Примечание 1 - Когда речь идет о негибком материале под "жесткостью" зачастую понимают "твердость".
Примечание 2 - Когда речь идет о мягком материале под "жесткостью" зачастую понимают "эластичность".
Примечание 3 - "Максимальная жесткость" является высшей эквивалентной жесткостью виртуальной поверхности, которая может быть передана устройством в стабильном состоянии.
2.20 толчок (burst): Преднамеренно короткое тактильное/осязательное воздействие.
Примечание - Продолжительность толчка, как правило, составляет от 10 мс до 1 с.
2.21 зонд (probe): Объект в виртуальном (моделируемом) пространстве, управляемый тактильным/осязательным устройством.
2.22 пространственное разрешение (spatial resolution): Минимальное изменение физического воздействия пользователя, которое может быть воспринято устройством (датчиком).
2.23 адресуемость (addressability): Способность адресного воздействия (устройства/программного средства) на конкретную точку или набор точек в рабочем пространстве.
3 Общие сведения об осязании
Наука об осязательной чувствительности и создание устройств, использующих тактильные/осязательные ощущения (далее - тактильных/осязательных устройств), зависит от знаний о человеческом теле, особенно о способности ощущать прикосновения к коже и кинестетической активности в конечностях и суставах.
На рисунке 1 показана взаимосвязь между компонентами в области тактильной чувствительности. Она делится на изучение прикосновений и изучение кинестетики.
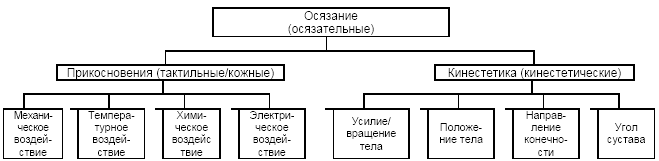
Рисунок 1 - Компоненты осязания
Прикосновение включает в себя воздействие на кожу различных раздражителей: механических, тепловых, химических и электрических (стимулов). Особые нервы и рецепторы в коже реагируют на эти раздражители с различной пространственной и временной разрешающей способностью.
Кинестетическое чувство можно сопоставить с кинестетической активностью, посредством которой пользователь воздействует на внешний, по отношению к действующей части тела, объект. При сочетании кинестетического чувства и кинестетической активности пользователь может определить усилие и крутящий момент, с которыми его тело противодействует воздействию тактильного/осязательного устройства. Подобным образом, прилагая соразмерное усилие и крутящий момент к объекту, пользователь может определить его свойства, например, инертность.
Кинестетика является двунаправленной. Она представляет собой как восприятие объектов среды, так и активное воздействие на них.
Примечание 1 - Различают активное прикосновение, связанное с кинестетикой, и пассивное прикосновение, с ней не связанное. Активное и пассивное прикосновения позволяют различать взаимодействия. Во взаимодействиях не всегда возможно соотнести тип прикосновения с конкретными устройствами. В зависимости от задачи одна форма прикосновения может превалировать над другой.
Примечание 2 - При взаимодействии с тактильными/осязательными устройствами могут быть использованы различные сочетания этих осязательных компонентов в разных точках соприкосновения.
Примечание 3 - В приложении С приведены сведения по физиологии осязания человека.
4 Общие сведения об осязании человека
4.1 Значение осязания
Осязание имеет большое значение в жизни человека. Например, когда человек ищет объект в кармане или сумке, не используя зрение, ему помогает осязание. Затем он идентифицирует объект, который хотел найти, захватывает его с подходящей силой и вынимает. Все эти действия основаны на осязании. Это чувство позволяет идентифицировать привычные объекты достаточно эффективно, почти безошибочно различать объекты в течение нескольких секунд, особенно, когда существуют некоторые предположения о вариантах.
Пальпируя поверхность тела, врач может получить информацию о состоянии органов под кожей и жировыми прослойками, которую он не может получить визуально.
Используя осязание, человек также может осуществлять удаленное прикосновение, когда находящийся на удалении объект исследуют (далее - зондируют) с помощью специального инструмента или устройства. Например, человек со слабым зрением может использовать трость для определения свойств поверхности земли.
Руки, в частности, имеют огромное значение в биологическом и культурном развитии людей, участвуя в их контакте со средой. Человек использует как для восприятия окружающих объектов, так и для действия при постоянном взаимодействии с окружающей средой. Рука имеет высокую способность приспосабливаться к выполнению различных задач манипулирования, от работы с очень мелкими объектами, требующими высокой точности, до работы с крупными объектами, когда необходимо прилагать большие усилия. Человек производит такие действия, всегда руководствуясь тактильной обратной связью.
Однако в компьютерных приложениях осязание является новым способом взаимодействия по сравнению со зрительным и звуковым взаимодействием и относительно ограничено. Современные тактильные/осязательные устройства нуждаются в большем развитии прежде, чем они смогут полностью использовать возможности осязания.
Прикосновение также часто используют для подтверждения информации об окружающей действительности.
4.2 Осязание и зрение
4.2.1 Сходство и различия
Осязание имеет много общих свойств со зрением. Оно может быть использовано для поиска объектов, расположенных на небольшом расстоянии от наблюдателя (на расстоянии вытянутой руки, если не использован вспомогательный инструмент), чтобы найти край, разделяющий поверхности, и воспринимать размер и форму объектов (не слишком больших, чтобы их можно было обследовать). Восприятие текстуры через осязание не только сопоставимо с восприятием с помощью зрения, но и во многих случаях превосходит его.
В некоторых задачах, осязание значительно менее эффективно, чем зрение, вплоть до невозможности выполнения задачи. Например, его невозможно использовать для обзора места действия, восприятия трехмерного пространства за пределами досягаемости рук, цвета и обнаружения границы на двухмерном изображении без тиснения.
В других задачах, осязание превосходит зрение. С помощью осязания человек может непосредственно судить о весе объектов, а также определять их твердость и температуру. Зрение может в какой-то степени воспринимать такие свойства объекта, но только при наблюдении за действиями другого человека.
4.2.2 Соотношение зрительного и осязательного пространства
В реальном мире объекты осязательно и зрительно воспринимаются так, что они занимают одно и то же пространство. В виртуальном мире это не обязательно так. Визуальный объект может быть расположен на экране, в то время как тактильный/осязательный объект может быть расположен в другом месте, например, на стороне клавиатуры (тактильное/осязательное устройство). Было доказано, что для целенаведения и для восприятия формы совпадение мест локализации объектов дает некоторое преимущество. В некоторых исследованиях установлено, что выполнение таких задач, как поиск рычагов управления и восстановление утраченного контакта с виртуальными объектами, происходят намного легче при условии совпадения их осязательного и зрительного расположения.
Сочетание визуальной и осязательной модальностей может улучшить восприятие ситуации пользователем. Вначале может преобладать зрительное восприятие, которое обеспечивает быстрый обзор места и идентификацию объектов на месте. Но тактильное восприятие может помочь быстрее определиться с текстурой объектов. В пределах личного пространства относительное расстояние между объектами может восприниматься осязательно, уточняя визуальное восприятие расстояния. К тому же, такие свойства объекта, как масса и способность к деформации, можно различить только через осязание.
Пример - Пианист, зрительно считывая музыку с листа, полагается на осязание, находя клавиши на клавиатуре, но, играя по памяти, он использует визуальные и тактильные модальности вместе, что делает его выступление более уверенным и тем самым повышает его выразительность.
4.2.3 Некоторые выводы для осязательного дисплея
Различия между зрением и осязанием делают опасной идею создания копии визуальных объектов для их осязательного представления. Такое копирование может быть успешным в простых случаях, но в более сложных часто возникают проблемы. Важно знать, что создание эффективного осязательного пространства подразумевает особое внимание к его осязательным свойствам. Эффективное визуальное представление пространства не является гарантией того, что то же самое пространство может быть успешно представлено в осязательном виде.
Способность организма быстро координировать восприятие окружающей среды с помощью различных чувств является дополнительным преимуществом. Зрительные и тактильные ощущения могут работать вместе для обеспечения более быстрого определения местоположения раздражителей, чем это было бы возможно с одной из модальностей в отдельности.
Экспериментально доказано, что динамическая тактильная информация может быть использована для переориентации зрительного внимания и наоборот.
4.3 Мануальное исследование объекта
Движения наблюдателя во время осязательного исследования окружающей среды, как правило, не случайны, а специально направлены на получение желаемой информации. Шаблоны таких движений, называемые исследовательскими процедурами, состоят из нескольких базовых процедур, таких как:
a) перемещение из стороны в сторону - для восприятия текстуры;
b) надавливание - для определения жесткости;
c) удерживание на весу - для восприятия веса;
d) охватывание (объекта одной или двумя руками) - для восприятия в целом формы и объема;
e) исследование контура - для восприятия формы, как в целом, так и в деталях.
Использование тактильных/осязательных устройств может ограничивать набор исследовательских процедур, доступных пользователю, сокращая возможности исследований. Специальное обучение движениям, подходящим для конкретных дисплеев, может частично компенсировать этот недостаток.
4.4 Обучение исследовательским процедурам
Текстура является меньшей проблемой для восприятия объектов, чем форма, возможно потому, что исследовательская процедура для определения текстуры намного проще, чем таковая для определения формы. При исследовании текстуры пользователь может совершать произвольные движения по поверхности объекта, в то время как исследование формы требует весьма специфических движений. Однако обучение подходящим исследовательским процедурам для заданной формы может значительно повысить производительность. Это важно учитывать при оценке осязательных дисплеев, так как существует риск недооценки полезности устройства, если пользователи не имеют достаточного опыта работы с ним.
4.5 Проблема обзора с помощью осязания
На практике одной из самых сложных проблем, связанных с осязанием, является получение общего представления о месте действия (обзора). Посредством зрения это представление формируется практически мгновенно. Бывают ситуации, когда короткий осязательный контакт с объектом может предоставить информацию такого же качества, как и зрение, особенно, когда наблюдатель имеет предположения об оцениваемом объекте. Однако, в большинстве случаев идентификация объектов только с использованием осязания обычно представляет собой кропотливую и трудоемкую задачу. Зачастую полезно дополнить осязание звуковой или визуальной информацией. Например, это может быть устная или текстовая информация об объекте, или инструкция о том, как надо обследовать место действия.
4.6 Минимальное физическое воздействие: абсолютные пороги
Осязательное восприятие основано на работе (сигналах) многих видов рецепторов в коже, а также в мышцах, сухожилиях и суставах. Минимальное физическое воздействие, необходимое для получения реакции рецептора и формирования нервного импульса, вызывающего ощущение у наблюдателя, называют абсолютным порогом. Воздействовать на кожу могут многие физические явления - от легкого прикосновения кисточкой до давления острием, ребром, углом или искривленной поверхностью. Они могут вызвать смещение, растяжение или вибрацию кожи и требуют разное количество энергии для того, чтобы их почувствовать. Обнаружено, что пространственная точность восприятия кожей составляет около 1 мм. В целом, осязание не настолько эффективно для различения объектов в пространстве, как зрение, но эффективнее, чем слух. Что же касается различения событий во времени, то осязание в этом случае эффективнее, чем зрение, но менее эффективно, чем слух.
Кожа - это обширный орган чувств. Различные области кожи отличаются по чувствительности. Кончики пальцев являются одними из наиболее чувствительных участков кожи и лучше всего подходят для исследования окружающей среды. Губы и рот также очень чувствительны. Эта особая чувствительность была использована в создании тактильного/осязательного устройства, которое размещают во рту. Менее чувствительные части тела, такие как живот и спина, также использовались в качестве мест для расположения тактильных/осязательных устройств, но пространственное разрешение в этих местах гораздо ниже, чем в руках и во рту.
Важно учитывать возраст потенциальных пользователей тактильных/осязательных устройств, так как с возрастом происходит значительное снижение осязательной чувствительности.
4.7 Минимальное различие, необходимое для восприятия
Минимальное различие силы двух воздействий, при котором наблюдатель воспринимает их как различные, называют дифференциальным порогом или "едва заметной разницей".
Пример 1 - Для обнаружения разницы в направлении действия двух сил она должна составлять не менее 33°.
Пример 2 - При сравнении упругости объектов путем их сжимания, сила сопротивления одного из них должна быть примерно на 7% больше, чем другого.
4.8 Восприятие геометрических свойств объектов
Свойства объекта разделяют на геометрические свойства и свойства материала. Размер и форма представляют собой геометрические свойства, обычно используемые для идентификации объектов. В реальном мире для получения этой информации используют исследовательские процедуры охватывания и следования контура. Эти процедуры не всегда доступны при использовании существующих осязательных дисплеев. Восприятие формы с такими дисплеями возможно, но это менее эффективно и требует больше времени, чем в реальном мире. Одной из основных причин этого является то, что большинство тактильных/осязательных устройств обеспечивает единственную точку контакта.
4.9 Восприятие веса
Осязательное восприятие веса изучали еще в XIX веке. В таких исследованиях недавно появилось новое направление - рассмотрение того, как люди судят о весе на основании действий с объектом. Раздражителем в данном случае является противодействие крутящему моменту, воспринимаемое осязательной системой. Такие свойства, как длину стержня или форму объекта, можно оценить, манипулируя стержнем или объектом. Количество жидкости в непрозрачном контейнере можно осязательно оценить, только встряхнув контейнер.
4.10 Восприятие свойств материала
Поверхность предмета может иметь много свойств. Она может изменяться от твердой до мягкой, а также от гладкой до шероховатой. Последнее свойство называется текстурой и зависит от микроструктуры поверхности - равномерных или неравномерных отклонений от идеально гладкой поверхности. Это микроструктура, которую можно противопоставить макроструктуре, которая задает форму объекта. Мягкий/твердый и гладкий/шероховатый - два основных показателя объектов в ощущениях, воспринимаемых через осязание. Также существуют свойства "липкий/скользкий" в зависимости от степени сопротивления поверхности при движении по ней. Были попытки отразить тепловые свойства объекта, но они пока не очень успешны.
В реальном мире существуют сложные взаимодействия между осязанием, зрением и слухом при восприятии текстуры. Иногда они дополняют друг друга, иногда они противоречат друг другу, а иногда одно может преобладать над другими. Когда рассматривают мультисенсорное представление объектов необходимо принимать во внимание совместное действие всех трех аспектов.
Текстуру, как правило, воспринимают при перемещении пальцев по исследуемой поверхности. Но текстуру можно также воспринять другими способами, например, с помощью ручного инструмента при существовании жесткой связи между кожей и поверхностью. Этот метод может быть полезен в виртуальных средах для передачи текстуры.
В отличие от формы, о свойствах виртуальной поверхности сравнительно легко судить с помощью осязания в обоих мирах - реальном и виртуальном. В эксперименте, где зернистость как реальной, так и виртуальной наждачной бумаги была исследована иглой, выводы были очень схожи. Однако иногда возникают проблемы с реалистичной передачей сложных для осязания текстур.
4.11 Количество и размер контактных поверхностей в тактильных/осязательных устройствах
При естественном функционировании руки, несколько контактных поверхностей, как правило, это кончики нескольких пальцев, одновременно находятся на поверхности исследуемого объекта. Во многих современных осязательных дисплеях количество контактов невелико и в большинстве случаев ограничивается одним контактом. Виртуальная контактная поверхность тоже, за исключением немногочисленных устройств, представлена только одной точкой. Такие контактные моделирующие устройства не достаточно реалистично моделируют осязательное пространство.
При использовании только одной зоны контакта невозможно получить одновременно информацию из нескольких контактных зон; доступна только последовательная информация.
Использование только одного пальца означает, что исследовательская процедура охватывания не может быть использована.
Примечание - Охватывание - важная исследовательская процедура по восприятию формы объекта в целом, при которой объект охватывают несколько пальцев.
В результате исследований восприятия доказано, что отсутствие пространственно-распределенной информации по точкам контакта более существенно, чем фактическое количество точек контакта.
4.12 Выводы
Несмотря на то, что чувство осязания не может обеспечить мгновенный обзор пространства, а исследуемые расстояния не могут превышать расстояния вытянутой руки, оно имеет высокую эффективность, предоставляя информацию об объектах и событиях в ближайшем пространстве. Руки могут очень четко выполнять многие задачи в реальном окружении. Они позволяют определять геометрические и физические свойства поверхности с помощью исследовательских процедур. Они могут определить вес и форму, перемещая объект и воспринимая поступательное и вращательное движение (как при определении количества жидкости во встряхиваемом контейнере).
При представлении объектов и событий для осязательного восприятия, важно учитывать особые свойства осязательных чувств. Устройства и программное обеспечение, имеющиеся в настоящее время, обеспечивают хорошее аналоговое моделирование, что позволяет осуществить частичное отображение осязательных чувств. С другой стороны, они ограничивают способы, с помощью которых пользователь может осязательно воспринимать окружающую обстановку. В будущем устройства смогут использовать больше возможностей осязательного восприятия доступных человеку-оператору.
5 Использование тактильных/осязательных взаимодействий
5.1 Общие положения
Тактильные и осязательные устройства могут быть использованы во многих различных ситуациях и для решения многих различных задач. Для некоторых задач они могут быть заменены другими устройствами, для других - могут быть использованы совместно с другими устройствами, для остальных задач природа данного типа обратной связи означает, что эти устройства являются наиболее эффективными.
Благодаря своим компактным размерам и минимальным требованиям к питанию, тактильные дисплеи предлагают доступные средства обеспечения доступа к данным посредством осязания. Тактильные дисплеи часто достаточно малы, что позволяет устанавливать их на другие интерактивные устройства, такие как мышь, клавиатура или игровой контроллер, или на портативные устройства, такие как мобильный телефон и карманный персональный компьютер (или даже на тактильные/осязательные устройства, обеспечивающие обратную связь по усилию). Тактильная информация широко используется в видеоиграх как недорогой способ предоставления сенсорной обратной связи посредством игровых джойстиков. Тактильные ощущения крайне важны для успешной манипуляции предметами, обнаружения границ и восприятия текстуры. Их также используют для более выразительных и качественных взаимодействий, таких как невизуальные коммуникации (например, похлопывание по плечу или поглаживание руки), и для восприятия качества продукции.
Тактильные/осязательные устройства, обеспечивающие обратную связь по усилию, как правило, намного крупнее, чем просто тактильные и требуют больших энергозатрат для формирования больших усилий. Поэтому они, как правило, стационарные. Они чаще ориентированы на имитацию реальных задач, например, их используют в хирургическом тренажере (далее - симуляторе). Их высокая точность и реалистичность позволяет использовать их для тренировки мелких сенсорных навыков, даже если они требуют моделирования очень тяжелых или динамических объектов.
В некотором отношении проще имитировать большие усилия, требующиеся для кинестетического взаимодействия с объектами, чем меньшие, требующиеся для восприятия кожей. Поэтому устройства, которые обеспечивают обратную связь по усилию, могут представлять объекты более реалистично, чем тактильные устройства. В следующих разделах рассматриваются некоторые из основных областей использования тактильных дисплеев и дисплеев с обратной связью по усилию.
5.2 Доступность
Осязательные дисплеи могут предложить альтернативный канал получения информации, если другие чувства ослаблены. Традиционно используемые кодировки, такие как шрифт Брайля, эффективны при представлении текстовой информации не визуально, а на ощупь, но способы прикосновения могут также применяться для представления или усиления символьных и графических данных для людей с ослабленным зрением. В качестве альтернативы для людей с проблемами слуха прикосновения могут быть использованы для представления сигналов тревоги или других сообщений, которые в иных случаях передаются с использованием звука. Процесс сенсорного замещения заключается в обнаружении раздражителей с помощью электронных средств, преобразовании раздражителя посредством обработки сигналов и представлении преобразованного раздражителя в другой сенсорной модальности.
Динамически обновляемые дисплеи со шрифтом Брайля обеспечивают гибкость и независимость. Они могут быть использованы для мобильных тактильных/осязательных устройств, таких как тактильные/осязательные кнопочные панели/клавиатуры с обратной связью и устройства отображения информации для слепых. Наиболее часто используемые тактильные дисплеи вызывают ощущения с помощью механических воздействий на кожу. Обычно это делается с помощью небольших вибрирующих пластин, прижимаемых к коже, или воздействия штырька или набора штырьков на кончики пальцев. Существуют системы, которые дают слабовидящим людям доступ к виртуальным картам через интернет, которые основаны на печати карт на принтере Брайля для слепых и размещении на сенсорном планшете.
Тактильные/осязательные устройства могут быть использованы для представления информации людям с нарушениями зрения, для которых затруднен доступ к таким материалам, как графики, диаграммы или таблицы. Шрифт Брайля удобен для представления текстовой информации, но не подходит для сложных изображений. В системах визуализации линейные графики или столбиковые диаграммы могут быть представлены как углубления, которые позволяют пользователям исследовать их, чтобы ощутить их форму. Это очень удачный способ, который может передавать информацию более эффективно, чем тиснения на бумаге, и может быть динамическим, тогда как бумага не может быть изменена, и может позволить пользователям работать с данными самостоятельно, без помощи зрячего помощника.
5.3 Взаимодействия с настольным компьютером
Осязательная обратная связь может быть использована в графических пользовательских интерфейсах для настольных компьютеров, например, с помощью вибрирующей мыши. Хотя эффект вибрации при захвате единичных целей может лишь незначительно уменьшить время наведения на цель, он может сократить время, которое пользователь проводит над целью. В дополнение тактильной обратной связи (например, вибрация с частотой 200 Гц при наведении курсора мыши на цель) может повысить скорость нахождения цели в случае маленьких, дискретно расположенных целей. Однако когда существует несколько целей, тактильная обратная связь может вызвать путаницу и снизить производительность, поскольку сигналы обратной связи от различных целей накладываются друг на друга.
Силовая обратная связь может быть использована для помощи в определении предметов на рабочем столе графического интерфейса пользователя и для зрячих лиц, и для незрячих. Различным частям стандартного интерфейса можно дать осязательные эффекты, например, границы окна могут быть обозначены выпуклой рамкой для облегчения их перемещения, или же можно перетащить окна, нажав на них посильнее, как если бы мы передвигали лист бумаги по поверхности стола.
5.4 Взаимодействие с мобильными устройствами
Тактильную обратную связь эффективно используют в мобильных телефонах и пейджерах, где уведомления о входящих вызовах и сообщениях могут быть сформированы в виде вибросигнала. Поскольку такие устройства часто носят в карманах, то при наличии у этих устройств вибросигнала, не обязательно постоянно иметь визуальный контакт с дисплеем. Существует большое количество ситуаций, в которых звуковые оповещения мобильных устройств неуместны (например, в библиотеке звонящий телефон беспокоит посетителей, а в шумной толпе его можно не услышать). Тактильная обратная связь решает множество таких проблем и очень популярна среди пользователей.
Использование вибрации может распространяться дальше, чем просто сообщения и сигналы мобильного телефона. Телефоны с сенсорным экраном, которые не имеют физической клавиатуры - сейчас не редкость. Хотя клавиатуры, используемые в устройствах с сенсорным экраном, основаны на реальных мобильных клавиатурах, теряется одна важная особенность: кнопки не могут обеспечить тактильный отклик при прикосновении к ним или нажатии, как в случае физических кнопок. Это приводит к значительному снижению скорости ввода. Добавлением тактильной обратной связи, обеспечиваемой внутренним вибродвигателем телефона, скорость нажатия кнопок сенсорного экрана можно довести до уровня реальной физической клавиатуры.
Тактильные индикаторы прогресса могут использовать тактильные импульсы для указания оставшегося невыполненным процента задачи (например, при загрузке веб-страницы или загрузке/скачивании фотографий) так, что пользователь во время ожидания может смотреть на что-то другое. "Осязательные смайлики" могут быть использованы для выражения эмоций вместо графических смайликов, таких как "". Такие тактильные/осязательные иконки могут появляться при вводе их текстового эквивалента и затем могут быть отправлены на вибродвигатель телефона.
Тактильная обратная связь может быть использована для передачи информации о направлении. Переносной жилет с тактильными функциями может передавать навигационную информацию, включая информацию о направлении, вращении, скорости и ускорении. Активация отдельного привода в правильном месте может указать направление, в то время как воздействие некоторой последовательности приводов может сообщить о вращении. Изменением частоты, интенсивности или продолжительности вибраций можно указать на увеличение/уменьшение скорости или ускорения. Точность такого дисплея составляет порядка 10°. Этого более чем достаточно, чтобы направлять вертолет или лодку по заданному маршруту. Тактильная обратная связь может быть использована в автомобилях для предупреждений об уходе с полосы движения и о других, потенциально опасных событиях. Водители зачастую реагируют более оперативно на тактильные предупреждения, чем на звуковые или зрительные сигналы.
5.5 Робототехника
Телеробототехника, или управляемая человеком робототехника с дистанционным управлением, представляет собой сформировавшуюся прикладную область для тактильных/осязательных устройств. Такие системы могут позволить оператору работать с радиоактивным материалом в ядерном реакторе. Оператор может смотреть сквозь защитное стекло и работать с флаконами с жидкостью, используя щипцы, и в то же время манипулировать ручками на рычагах, спускающихся с потолка.
Электромеханические тактильные/осязательные устройства могут быть составной частью пульта управления роботами. Формирование полноценной тактильной/осязательной обратной связи устройства в этой области ограничено возможной нестабильностью. Такая нестабильность может вызвать вибрации робота, и тем самым повредить объекты в его рабочем пространстве. Для обеспечения безопасности любых робототехнических систем, управляемых с помощью устройств с обратной связью по усилию предпринимают меры предосторожности. Меры предосторожности могут предусматривать использование датчика контакта, который отслеживает наличие захвата оператором рукояти тактильного/осязательного устройства: если оператор отпустит рукоять, то робот останавливает свою деятельность и переходит в безопасный режим.
Подобные роботам манипуляторы используют под контролем операторов в различных областях. Подъемный кран на стройплощадке может вести оператор, управляя джойстиком на устройстве, закрепленном на поясе. Роботы для обезвреживания бомб, роботизированные руки в космосе и подводные манипуляторы позволяют работать дистанционно в опасных или агрессивных средах. В каждом из этих примеров управление, как правило, осуществляется с использованием набора колесиков управления или рычажков, привязанных к декартовым координатам, или даже к координатам сочленений элементов робота.
Активные тактильные/осязательные устройства могут быть использованы в малоинвазивной хирургии. Такие системы обратной связи дают оператору ценную информацию о локализации тканей и их характеристиках. Они могут также предоставить ориентиры в виде "виртуальных границ", осязательных коридоров, которые помогают направить устройство к целевому местоположению под контролем оператора, и не позволить устройству перемещаться за пределы установленной для операции области.
При дистанционной работе с наличием длительных временных задержек возникают особые проблемы. Примером является дистанционная пальпация тканей или введение иглы в ситуации, когда доктор находится на одном континенте, а пациент на другом.
В меньшем масштабе тактильные/осязательные устройства могут быть использованы совместно со сканирующими зондовыми микроскопами, что позволяет "почувствовать" атомы, формирующие поверхность кристалла.
5.6 Медицина
Инструменты, основанные на виртуальной реальности, стали обычной практикой в обучении медицине. Тренажеры позволяют студентам отрабатывать навыки прежде, чем опробовать их на реальных больных. Они могут также отрабатывать редкие и уникальные процедуры, и это дает много преимуществ с точки зрения безопасности. Врачи тоже могут планировать и отрабатывать особенно сложные задачи прежде, чем перейти к пациентам. Тренажеры, которые обеспечивают только визуальную обратную связь, упускают множество наиболее важных составляющих проведения обследования или операции, в то время как осязание может быть использовано для получения тактильных навыков безопасным способом.
Для малоинвазивной хирургии, являющейся очень сложной для освоения, устройства на основе осязания могут быть очень полезны. Длинные гибкие инструменты вводят через небольшие разрезы на теле пациента. Хирурги видят то, что они делают, через маленькие видеокамеры, вставленные вместе с инструментами. Эндоскопические инструменты ухудшают восприятие хирургов по сравнению с открытой операцией, но прикосновение крайне важно для идентификации окружающих тканей, кровеносных сосудов, отклонений и приложения оптимальных усилий при манипуляции с тканями. Совместное использование инструментов малоинвазивной хирургии с тактильными/осязательными устройствами и сложными графическими моделями позволяет проводить очень реалистичное обучение. Хирурги могут отрабатывать управление инструментами в отсутствие пациента, определять какие усилия необходимо применять, и таким образом, могут приобрести необходимые сенсорно-двигательные навыки. Может быть сделана запись виртуальной операции, которую затем можно воспроизвести для дальнейшего анализа. Все это может быть сделано в процессе обучения без какого-либо вреда для пациентов.
В области ветеринарии исследователи разработали тренажеры для обучения пальпации и диагностики беременности лошадей и коров с помощью обратной связи по усилию. У этих животных диагностика беременности осуществляется путем внутреннего обследования исключительно через прикосновение. Это представляет трудности в процессе обучения и для студентов, и для преподавателей; студенты не могут видеть, что они делают, а преподаватели не могут с уверенностью сказать, правильно ли студенты выполняют пальпацию. Ошибка может иметь серьезные последствия для животного. Тренажеры позволяют студентам чувствовать яичники животного, чтобы изучить, что нужно нащупать и с какой силой нажимать. Они также позволяют студентам усвоить ключевые ориентиры в теле животного с тем, чтобы определять правильные места пальпации.
Также осязание используют пациенты. Тактильные/осязательные устройства могут помочь людям восстановить навыки контроля и движений после инсульта. Тактильные/осязательные устройства могут сначала помочь пациентам заново учиться двигаться, прикрепив эластичные тяги на руки при перемещении руки, т.е. чтобы помочь пациенту восстановить контроль и точность движений. По мере того, как пациент становится сильнее, устройство может увеличивать сопротивление для восстановления мышечной силы.
5.7 Игровая индустрия
Технологию осязательных взаимодействий широко используют в интерфейсах игровых приложений. Массовый маркетинг компьютерных игр привел к появлению на рынке различных типов тактильных/осязательных устройств, многие из которых могут быть использованы не только для игр. Технология осязательных взаимодействий находит свое применение в компьютерных играх. И в азартных играх, и в виртуальных приключенческих играх осязание добавляет новый аспект реалистичности переживаний пользователя.
Типичная игра с использованием осязательных элементов управления - это симулятор управления автомобилем. Таким элементом может быть руль, а также педали акселератора и тормоза. Неровности и профиль дороги могут быть переданы пользователю через руки, ноги или все тело. Такое взаимодействие также связано с использованием больших экранов и кресел, оснащенных двигателями. Поскольку амплитуда перемещения у такого устройства невелика, основным способом передачи являются ускорения и толчки. Степень контроля пользователя над игрой, например, при управлении виртуальным автомобилем - вопрос разработки и сложности.
В азартных играх взаимодействие пользователя может быть расширено за счет использования тактильной панели, где каждая кнопка связана с особым режимом вибрации. Одна кнопка может быть воспринимаема как мягкая пружина, другая может выдавать последовательность колебаний различных частот, и третья кнопка может имитировать бросок пары костей.
В спортивных тренажерах используются трехмерные локаторы, которые позволяют игроку имитировать, например, замах теннисной ракетки или клюшки для гольфа или удар по бильярдному шару. Сложно, но возможно, создать такие устройства, в которых пользователь преодолевает фиксированное усилие. С другой стороны, воздействие, которое чувствуют при ударе объекта, может быть смоделировано с использованием портативного осязательного оборудования. При наличии тесной взаимосвязи между всеми модальностями, т.е. тактильными, визуальными и звуковыми сигналами, чувство реальности усиливается многократно.
5.8 Искусство и творчество
Осязание делает возможным целый спектр новых музыкальных инструментов. Устройства, основанные на сенсорных и реактивных составляющих, таких как рычаги, дают музыкантам новые средства самовыражения. "Пальцевое пианино", состоящее из выступающих стержней, по которым можно ударять, позволяет музыканту попробовать различные движения при игре. Тактильные/осязательные устройства могут имитировать движение смычка по струнам скрипки или имитировать ударный инструмент.
"Осязательная кисточка" может позволить художнику наносить виртуальные краски на холст. Обратная связь по усилию позволяет художнику наносить краску, используя осязание так же, как и зрение. Можно лепить модели из виртуальной глины с использованием тактильных/осязательных устройств. Можно отделять части таких моделей, воспринимая это на ощупь и на глаз, и можно добавлять новую "глину" к модели.
Программное обеспечение для мультипликации использует множество инструментов для того, чтобы сделать разработку мультфильмов более эффективным. Одна из инноваций представляет собой последовательность анимационных кадров, привязанных к линии в виртуальном трехмерном пространстве, которую можно тянуть или толкать с помощью тактильного/осязательного устройства. Путем добавления различной сопротивляемости определенным движениям, такая последовательность может пройти "точную настройку" с использованием точных движений тактильного/осязательного устройства. В принципе, художник мог бы представлять свое произведение, используя графику и чувства прикосновения. Тактильные/осязательные устройства рядом с презентацией могли бы позволить наблюдателю как видеть, так и чувствовать скульптуру, будь то в виртуальном пространстве или в форме "дополненной реальности", когда виртуальный трехмерный экран наложен поверх реального трехмерного объекта.
В области коммерции организации могли бы представлять каталоги своей продукции с помощью тактильных/осязательных устройств. Можно представить себе такие варианты использования, как выбор ткани для одежды, когда есть возможность почувствовать фактуру материала, или электроинструментов, работу которых можно увидеть и почувствовать.
5.9 Мультимодальные приложения и тренажеры
Двухмерные и трехмерные дисплеи с обратной связью по усилию позволяют разработчикам взаимодействия использовать другие средства обратной связи. Водителей, капитанов и пилотов можно обучать управлению транспортными средствами на полномасштабных осязательных дисплеях (тренажерах). Например, пилотажный тренажер (летный симулятор) - кабина самолета или вертолета, смонтированная поверх механической системы (движущееся основание с электроприводом или гидравлической подъемной системой). Симулятор реагирует на действия пользователя и события в процессе моделирования. Когда пилот управляет самолетом, модуль, в котором он сидит, поворачивается и наклоняется, формируя для пользователя осязательную обратную связь. Некоторые летные симуляторы представляют собой полностью закрытый модуль, тогда как другие просто имеют набор компьютерных мониторов, расположенных так, чтобы перекрывать поле зрения пилота.
Чтобы усилить ощущение присутствия в виртуальных сценах, могут быть добавлены различные невизуальные модальности, такие как речь, звук или музыка. Например, некоторые парки развлечений создают для посетителей ощущение присутствия в фильме, добавляя реалистичные эффекты огня, тумана, внезапных потоков воды или торнадо. Осязательная обратная связь создается путем встряхивания кабины или перемещением кресел, на которых сидят посетители.
Мультимодальностью называют взаимодействие с системами, которые включают в себя несколько каналов вывода и несколько устройств ввода. Как правило, мультимодальное взаимодействие может быть выполнено различными способами - замещением некоторых модальностей, либо добавлением дублирующих модальностей. Например, в исследовании "Поставь это там" указание на какой-то объект в трехмерном пространстве может сопровождаться голосовыми командами. Пользователи испытывают мультимодальные взаимодействия, которые являются более естественными, так они делают меньше ошибок, и поэтому точность, необходимая для распознавания входного сигнала, может быть повышена.
Также мультимодальные взаимодействия часто встречаются в технологиях помощи слепым и слабовидящим людям. Дисплей Брайля предназначен для изучения и считывания тактильной информации пальцами. Вывод информации на дисплей Брайля синхронизируют с речевым выходом, что уменьшает количество ошибок и недопониманий при взаимодействии. Сегодня плоские тактильные дисплеи часто устроены как устройства ввода прикосновением и воспринимают расположение одного или нескольких пальцев. Вспомогательная технология использует этот принцип для распознавания жестов рук во время чтения. Слепой пользователь может читать шрифт Брайля пальцами, но так же может ускорить движение пальцев к концу строки, чтобы использовать команду-жест для переключения модальности. Вместо продолжения считывания шрифта Брайля компьютер начнет воспроизводить речь, а читатель, который достиг конца строки Брайля услышит речевой вывод информации.
Тактильные карты представляют тактильную информацию о географических объектах через звукоосязательное взаимодействие. Текстуры, границы и другие структуры рельефа позволяют бимануальное исследование. Прикосновение к тактильной карте устройством ввода генерирует речевой вывод для информирования пользователя, например, о названии мест и улиц. Устройство с матрицей из более, чем 7000 штырьков, может быть использовано для реализации тактильных карт и динамического обновления географической информации.
6 Проектирование тактильных/осязательных взаимодействий
6.1 Руководство по проектированию тактильного/осязательного взаимодействия
6.1.1 Человеко-ориентированное проектирование
Тактильные/осязательные взаимодействия рекомендуется проектировать в соответствии с принципами человеко-ориентированного проектирования, установленными в ИСО 9241-210.
6.1.2 Проектирование индивидуальных взаимодействий
Индивидуальные взаимодействия рекомендуется проектировать с учетом требований ИСО 9241-110.
6.1.3 Проектирование тактильных/осязательных интерфейсов
Тактильные/осязательные интерфейсы рекомендуется разрабатывать на основе имеющихся руководств по эргономике, касающихся используемого оборудования и программного обеспечения для элементов пользовательского интерфейса, включая следующие:
a) выбор соответствующих способов диалога для взаимодействия;
b) принципы и критерии для разработки физических устройств ввода в соответствии с требованиями ИСО 9241-410;
c) характеристики отображаемой информации в соответствии с требованиями ИСО 9241-12.
Примечание 1 - Актуальное руководство по методам диалога можно найти в стандартах ИСО 9241-14 - ИСО 9241-17.
Примечание 2 - Несмотря на то, что характеристики, упомянутые в с), разработаны для визуальных дисплеев, их также можно применять при разработке устройств с использованием тактильного/осязательного ввода и вывода.
Примечание 3 - Использование осязательных дисплеев может означать, что для осмысления информации потребуется больше времени, чем в случае дисплеев с визуальным отображением.
6.2 Проектирование тактильного/осязательного пространства
6.2.1 Общие положения
6.2.1.1 Тактильные/осязательные объекты и физическое, временное и логическое пространства рекомендуется проектировать в соответствии с требованиями ИСО 9241-920.
6.2.1.2 При разработке тактильных/осязательных взаимодействий следует учитывать физическое, временное и логическое пространство, в которых они происходят.
a) Физическое пространство включает в себя расположение, положение и компоновку тактильных/осязательных объектов относительно пользователя и других объектов, с которыми пользователь может взаимодействовать. При проектировании физического пространства размеры имеют большое значение.
b) Временное пространство предполагает использование параметров тактильных/осязательных взаимодействий, зависящих от времени, в том числе волновую форму воздействия, ритм и другие, зависящие от времени закономерности, такие как изменения амплитуды и частоты воздействий, а также использование нескольких тактильных/осязательных приводов.
с) Логическое пространство обеспечивает концептуальное понимание того, как пользователь взаимодействует с объектами и информацией. Логическое пространство создают используемые для этого приложения. Оно содержит структурированную информацию, связи между объектами (например, линейные, иерархические или сетевые) и методы взаимодействия. Логическое пространство не зависит от модальности представления информации пользователю. Связи имеют большое значение при разработке логического пространства.
Совмещение логического, физического и временного пространства может быть ограничено необходимостью соблюдения баланса между исследованием и представлением.
Примечание - Проектирование взаимодействий с видеодисплеями включает в себя компоновку элементов интерфейса пользователя в ограниченном двумерном пространстве. Из-за ограничений этого пространства при проектировании стараются фокусироваться на визуальных аспектах этой компоновки, мало учитывая действия пользователя, необходимые для работы с элементами интерфейса пользователя, которые находятся в этом пространстве. Проектирование тактильных/осязательных взаимодействий может включать в себя компоновку тактильных/осязательных элементов интерфейса пользователя в потенциально неограниченном трехмерном пространстве. Это подразумевает также проектирование действий пользователя и реакций на них в этом пространстве.
6.2.2 Проектирование логического пространства
6.2.2.1 Логическое пространство не должно зависеть от модальности.
6.2.2.2 Проектирование логического пространства должно представлять и четко отражать взаимосвязи различной информации.
6.2.3 Проектирование физического пространства
6.2.3.1 При проектировании взаимосвязей в физическом пространстве рекомендуется руководствоваться требованиями эргономики с учетом пространственной ориентации и направления движения, в соответствии с ИСО 1503.
6.2.3.2 При определении размеров и содержимого физического пространства, где происходят тактильные/осязательные взаимодействия, рекомендуется предусматривать возможность пользователя действовать и реагировать в этом пространстве.
Примечание - Упомянутые руководства по эргономике включают в себя ИСО 9241-5, который устанавливает требования к расположению автоматизированного рабочего места и требования к позе, ИСО 11064-4, который устанавливает требования к расположению и размерам рабочих станций для использования в залах управления, и ЕН 894-4, который устанавливает требования к эргономичности и безопасности мест расположения и компоновки дисплеев и управляющих приводов.
6.3 Адресуемость и разрешающая способность при тактильном/осязательном взаимодействии
6.3.1 Общие положения
При проектировании тактильных/осязательных взаимодействий рекомендуется учитывать адресуемость и разрешающую способность.
Важное свойство тактильной/осязательной сенсорной системы состоит в том, что информация может быть передана в обоих направлениях: информационный поток от устройства к пользователю, а также информационный поток от пользователя к устройству.
С точки зрения системы и пользователь, и устройство имеют присущие им адресуемость вывода и разрешающую способность ввода.
Пример - Тактильный дисплей передает раздражители на кончики пальцев с помощью прямоугольной матрицы штырьков; разрешение и размеры матрицы определяет конструкция устройства.
У каждого потока информации существует адресуемость отправителя и разрешающая способность приемника. Например, в случае устройства, которое обеспечивает обратную связь по усилию, устройство формирует усилие с конкретной адресуемостью, а пользователь воспринимает это усилие с определенной разрешающей способностью. В то же время пользователь перемещается в положение с определенной адресуемостью и устройство воспринимает это с конкретной разрешающей способностью.
Адресуемость и разрешающая способность присущи всем параметрам тактильного/осязательного взаимодействия, в том числе изменениям сигналов во времени.
Как и в случае любых других средств отображения, ощущения, вызванные отдельными точками данных, могут быть, и являются, интегрированными в концептуальный образ, например, поверхность.
6.3.2 Адресуемость тактильного/осязательного интерфейса
Адресуемость тактильного/осязательного устройства является физической характеристикой самого устройства. Под ней понимают отдельные точки, в которых могут быть представлены данные (точки данных). Точки данных могут быть расположены в любом порядке, соответствующем приложению, например, в виде линейного одномерного массива - прямолинейного или криволинейного, как показано на рисунке 2 а), или в виде двухмерного или многомерного массива, как показано на рисунке 2 b).
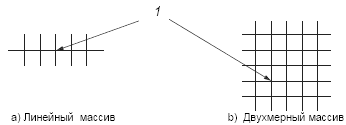
1 - точки данных (точки, в которых представлены или воспринимаются данные)
Рисунок 2 - Линейные и двухмерные массивы
Таким образом, расстояния между адресуемыми точками данных могут быть различны по разным осям и, в действительности, даже вдоль какой-либо одной оси. Однако, адресуемость, как правило, не сильно отличается для различных осей на одном устройстве при представлении данных. Особенно это касается тех случаев, когда требуется, чтобы представление объекта было узнаваемым.
Адресуемость у пользователя ограничена способностью пользователя к восприятию и управлению двигательной активностью.
6.3.3 Разрешающая способность тактильного/осязательного интерфейса
6.3.3.1 Устройство
Разрешающая способность тактильного/осязательного устройства определяется минимальным изменением физического выходного воздействия пользователя, которое способно воспринять устройство.
6.3.3.2 Пользователь
Разрешающая способность получения информации пользователем напрямую зависит от расположения сенсоров прикосновения (например, на кончиках пальцев). Чем больше сенсоров приходится на единицу площади, тем выше потенциальная разрешающая способность.
На рисунке 3 показаны адресуемые точки данных (такселы, taxels), ощущаемые сенсорами прикосновения человека с разрешающей способностью в четыре и девять такселов соответственно.
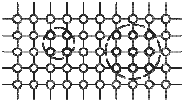
Рисунок 3 - Адресуемые точки данных
6.3.3 Разрешающая способность при тактильных/осязательных взаимодействиях и ее связь с адресуемостью
В большинстве случаев, как например, на рисунке 3, адресуемость устройства устанавливают не ниже способности человека распознавать точки данных, т.е. его разрешающей способности. Это означает, что точки данных, или промежутки между ними, не могут быть распознаны по отдельности.
Однако, в некоторых приложениях, где каждую точку данных человек должен ощущать отдельно и различать с другой точкой, важно обеспечить точную адресуемость с помощью увеличения расстояния между точками данных. Простейшим примером этого могут быть две точки, представляющие различные сведения, например, "да" или "нет", как показано на рисунке 4.
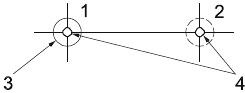
1 - "да";
2 - "нет"; 3 - разрешающая способность человека для прикосновений; 4 - адресуемые точки данных
Рисунок 4 - Две точки, представляющие различающуюся информацию
В тактильных/осязательных устройствах для человека-пользователя существует не только необходимость воспринимать информацию, представляемую тактильным/осязательным массивом точек данных, но и необходимость иметь возможность прикладывать усилие в ответ на сопротивление движению со стороны тактильного/осязательного устройства.
Способность передавать усилие необходима для того, чтобы позволить пользователю исследовать физические характеристики виртуального объекта. Такие характеристики, как твердость, шероховатость и эластичность могут быть исследованы с помощью давления кончика пальца (т.е. силы, деленной на площадь контакта). У человека адресуемость при приложении усилия меньше, чем адресуемость только при зондировании, поскольку приложение усилия является менее выверенным действием, чем зондирование.
7 Элементарные интерактивные задачи, инициируемые пользователем
7.1 Общие положения
Пользователи могут выполнять прикладные задачи, используя одну или несколько элементарных задач, поддерживаемых тактильным/осязательным устройством и соответствующим программным обеспечением. Элементарные задачи предоставлены пользователям системой в качестве инструментов выполнения задач, для которых разработано устройство. В любой задаче следует предоставить пользователю возможность выполнять следующие элементарные задачи:
- поиск,
- обзор места действия,
- навигация (перемещение),
- прицеливание,
- выбор,
- манипулирование.
7.2 Поиск
Рекомендуется, чтобы система позволяла пользователю осуществлять поиск заданного тактильного/осязательного объекта, части объекта или элемента информации и, по окончании поиска, выдавать полученный результат.
Примечание - "Поиск" отличается от "прицеливания" (см. подраздел 7.5). "Прицеливание" подразумевает нахождение чего-то, что находится непосредственно в поле зрения; "поиск" подразумевает выполнение задачи большей по продолжительности, чем выбор цели.
Пример 1 - Поиск осязаемых объектов с помощью устройства с единственной точкой контакта, которое обеспечивает обратную связь по усилию, осуществляется созданием некоторого усилия, направленного к центру осязаемого объекта, которого пока еще не касались.
Пример 2 - Поиск текста на дисплее Брайля включает обнаружение строк, которые разделены, по возможности, большими промежутками. Опытные читатели шрифта Брайля используют один палец для поиска начала нового текста (тактильных объектов), а другой палец для навигации по тактильным объектам.
7.3 Обзор места действия
Рекомендуется, чтобы система позволяла пользователю получать быстрый обзор тактильных/осязательных объектов, их расположения, взаимосвязей друг с другом и по отношению к пользователю.
Примечание - Обеспечение эффективного обзора важно для упрощения навигации и исследования, но может быть трудновыполнимо с помощью тактильного/осязательного устройства с единственной точкой контакта.
Пример - Обзор осуществляют с помощью мелкомасштабных осязательных объектов. Обзор позволяет понять, будет ли навигация начинаться за пределами или внутри тактильного объекта.
7.4 Навигация (перемещение)
7.4.1 Рекомендуется, чтобы система позволяла пользователю двигаться внутри тактильных/осязательных объектов и между ними для того, чтобы находить объекты и исследовать пространство.
7.4.2 Рекомендуется, чтобы система позволяла пользователям определять свое местоположение в тактильном/осязательном пространстве и находить оптимальный путь, чтобы добраться до необходимых объектов или элементов информации.
Примечание 1 - Навигация может быть затруднена, и сбой или ошибка могут привести к тому, что пользователь может "потеряться в тактильном/осязательном пространстве".
Примечание 2 - См. ИСО 9241-920:2009, 6.1.
Примечание 3 - В случае тактильных/осязательных взаимодействий элементарные навигационные задачи могут помочь перемещению в пространстве с большим числом измерений, например, в физическом пространстве с большим числом степеней свободы и большим количеством точек соприкосновения, включая множество частей тела.
Примечание 4 - Для того, чтобы начать процесс навигации, важно получить обзор места действия. Однако при использовании для взаимодействия тактильного/осязательного дисплея это может быть затруднено. Чтобы обеспечить обзор, можно использовать дополнительный тактильный/осязательный дисплей или альтернативные модальности.
Пример - Навигация осуществляется при помощи тактильных/осязательных устройств в сочетании с координатным устройством с тактильной обратной связью. Это может быть сделано вручную, с использованием больших массивов тактильных штырьков, воспринимающих движения пальцев рук из стороны в сторону, или с помощью механических рычагов, обеспечивающих точку прикосновения пальца.
7.5 Прицеливание
Рекомендуется, чтобы система позволяла пользователю идентифицировать и находить объекты или элементы информации быстро и точно.
Примечание 1 - "Прицелиться" на объект означает найти его быстро и эффективно. "Поиск" объекта означает процесс отыскивания чего-то, что не находится в поле зрения.
Примечание 2 - Объект может быть выбран как в результате поиска, так и в результате прицеливания.
Пример - Устройство, обеспечивающее обратную связь по усилию, имеет кнопки или другие датчики, прилегающие к точке контакта одного пальца так, что при прицеливании рука не двигается, а для активации датчика используется один или несколько других пальцев.
7.6 Выбор
7.6.1 Общие положения
Рекомендуется, чтобы система позволяла пользователю выбирать объекты по отдельности или сразу несколько объектов.
Примечание - Выбор объекта обычно приводит к отмене выбора объекта или объектов, выбранных ранее, за исключением случаев, когда предполагается поочередный выбор объектов.
7.6.2 Выбор объекта или функции
7.6.2.1 Рекомендуется, чтобы система позволяла пользователю выбирать объект или функцию, к которым они в данный момент имеют доступ.
7.6.2.2 Рекомендуется, чтобы система позволяла пользователю осуществлять выбор отдельно от выполнения каких-либо действий над объектом, например, активации/включения.
7.6.2.3 Рекомендуется обеспечивать выбор таким образом, чтобы пользователю было понятно, какие объекты или функции доступны ему в данный момент. Следует обеспечить четкую обратную связь при выборе объектов или функций.
Примечание - Предполагается наличие возможности выбрать один объект из многих и подразумевается способность распознавать правильность выбора с помощью отличительных признаков.
Пример - На дисплеях Брайля выбор осуществляют с помощью так называемых клавиш маршрутизации. Эти клавиши являются датчиками, расположенными рядом с ячейкой Брайля, срабатывающими от перемещения штырьков при прикосновении или от датчика прикосновения, встроенного в поверхность устройства. Они могут быть задействованы для выбора символа шрифта Брайля или для выбора опции меню.
7.6.3 Выбор группы объектов
Рекомендуется, чтобы система позволяла пользователю выбирать любую заданную группу объектов, к которым он в данный момент имеет доступ.
Примечание - Выбор группы объектов предполагает возможность выбора объектов из множества и подразумевает способность распознавать правильность выбора на основе индивидуальных характеристик объектов.
7.6.4 Выбор пространства
Рекомендуется, чтобы система позволяла пользователям выбирать любую определенную часть тактильного/осязательного пространства, к которому они в настоящее время имеют доступ.
Примечание - Выбор пространства предполагает возможность выбора части пространства и подразумевает возможность определения границы вокруг выбранной части.
7.6.5 Выбор свойств системы
Рекомендуется, чтобы система позволяла пользователю выбирать любое из свойств системы, к которым он в настоящее время имеет доступ, и изменять эти свойства, если это допустимо.
7.7 Манипулирование
7.7.1 Общие положения
Рекомендуется, чтобы система позволяла пользователю воздействовать на объекты, управлять ими или как-либо иначе влиять на них способами, соответствующими условиям задачи.
7.7.2 Масштабирование
Рекомендуется, чтобы система позволяла пользователю изменять масштаб тактильного/осязательного пространства, в котором он выполняет задачу.
Примечание - Масштабирование представляет собой изменение масштаба отображаемого пространства и всего, что в нем находится.
7.7.3 Изменение ориентации
Рекомендуется, чтобы система позволяла пользователю изменять ориентацию тактильного/осязательного пространства, в котором он выполняет задачу.
Примечание - Изменение ориентации представляет собой изменение вида объекта или положения объекта относительно других объектов или маркеров.
7.7.4 Перемещение объектов
Рекомендуется, чтобы система позволяла пользователю перемещать объект в пределах тактильного/осязательного пространства.
Примечание - Перемещение может быть осуществлено путем закрепления виртуального указателя на выбранном объекте и применения усилий в желаемых направлениях до тех пор, пока объект не займет новое требуемое положение. Затем указатель открепляют от объекта.
7.7.5 Изменение размеров
Рекомендуется, чтобы система позволяла пользователям изменять размер объекта в пределах тактильного/осязательного пространства.
7.7.6 Проверка свойств
7.7.6.1 Рекомендуется, чтобы система позволяла пользователю проверять свойства объектов в пределах тактильного/осязательного пространства, не активируя их.
7.7.6.2 Рекомендуется, чтобы система позволяла пользователю определять, какие свойства являются изменяемыми, а какие - нет.
Пример - Жесткость мягких предметов проверяют без контакта с поверхностью исследуемого объекта, т.к. она становится неопределимой из-за отражения любой приложенной силы, как в случае с резиновой эластичной лентой.
7.7.7 Создание и удаление
Рекомендуется, чтобы система позволяла создавать и удалять объекты в тактильном/осязательном пространстве, если это соответствует задаче.
7.7.8 Изменения атрибутов
Рекомендуется, чтобы система позволяла пользователю изменять атрибуты тактильных/осязательных объектов, если это соответствует требованиям задачи.
Пример - Пользователи имеют возможность изменить текстуру объекта, в соответствии со своими возможностями или предпочтениями.
8 Элементы тактильных/осязательных взаимодействий
8.1 Общие положения
Тактильные/осязательные элементы представляют собой программные блоки, которые могут быть объединены для создания сложных форм тактильного/осязательного обмена информацией с пользователем.
Тактильные/осязательные элементы включают в себя тактильные/осязательные эффекты и свойства объектов. Тактильные/осязательные эффекты разделяют на функциональные и зависящие от времени. В свойствах объектов выделяют общие свойства и свойства поверхности.
Примечание - Если осязательные эффекты происходят на частоте за пределами динамического диапазона взаимодействия с пользователем, особенно если они происходят на границах такого частотного диапазона, то осязательные эффекты являются однонаправленными и обеспечивают только передачу информации пользователю.
8.2 Тактильные/осязательные эффекты
8.2.1 Общие положения
Тактильные/осязательные функциональные эффекты изменяют формируемую осязательную обратную связь соразмерно реакции пользователя.
Примечание 1 - Эффекты, основанные на кинестетическом восприятии, обычно являются двунаправленными, тогда как тактильные эффекты, как правило, являются однонаправленными.
Примечание 2 - Поскольку тактильные эффекты являются только однонаправленными, тактильные устройства часто называют тактильными дисплеями, подчеркивая способность только передавать информацию, подобно акустическим или визуальным дисплеям.
Пример - При работе импедансных устройств (использующих управление сопротивлением) функциональные эффекты изменяют усилия на выходе устройства, в зависимости от положения зонда, например, чтобы имитировать эффект пружины.
8.2.2 Включение и отключение эффектов
Рекомендуется применять независимое включение и отключение всех тактильных/осязательных функциональных эффектов, доступных для определенного тактильного/осязательного устройства. При этом функциональные эффекты не должны влиять друг на друга.
8.2.3 Вектор силы
Вектор силы может быть добавлен к тактильной/осязательной обратной связи в текущем положении зонда, независимо от текущей ориентации зонда.
Примечание - В отношении ориентации, если задействован одноточечный контакт, обычно не имеет значения, использует ли пользователь наперсток на пальце или держит перо.
8.2.4 Силовое поле
Эффект силового поля добавляет вектор силы к тактильной/осязательной обратной связи, который параметризуют в пространстве в зависимости от положения зонда.
Примечание - Координаты силового поля могут быть параметризованы в линейной или объемной форме в зависимости от рабочей области виртуального пространства.
Пример 1 - Гравитация - силовое поле, которое параметризуют в координатах трехмерного пространства. Это силовое поле добавляет вектор силы с возрастающей по экспоненте величиной, при перемещении зонда по отношению к определенной точке пространства.
Пример 2 - Магнитное поле - тип силового поля, которое параметризуют в виде силовых линий в пространстве вокруг магнита.
8.2.5 Эффект пружины
Эффект пружины должен создавать силу, пропорциональную заданному коэффициенту и расстоянию зонда до определенной точки.
8.2.6 Эффект демпфирования
Эффект демпфирования должен создавать силу, пропорциональную заданному коэффициенту и скорости движения зонда.
8.2.7 Эффект массы
Эффект массы должен создавать силу, пропорциональную заданному коэффициенту и ускорению движения зонда.
8.2.8 Температурное поле
Температурное поле характеризует определенную температуру тактильной/осязательной обратной связи в зависимости от положения зонда в виртуальном пространстве.
Примечание - При проектировании функционального эффекта в виде температурного поля должна быть учтена невысокая пропускная способность обычных температурных дисплеев.
8.3 Тактильные/осязательные свойства объекта
8.3.1 Свойства объекта
Для объекта могут быть заданы тактильные/осязательные свойства.
Примечание - Осязательные свойства объекта в некотором отношении сходны по терминологии и применению с визуальным представлением объекта, особенно в отношении геометрических свойств, таких как положение, размер и форма. В других отношениях, таких как вес, температура и свойства материала (мягкий/твердый, гладкий/шероховатый), осязание обеспечивает поступление сведений, получение которых не доступно через зрение или слух.
8.3.2 Общие свойства объекта
8.3.2.1 Положение, форма и размер
Чтобы дифференцировать тактильные/осязательные объекты могут быть использованы такие их характеристики, как положение, форма и размер.
8.3.2.2 Жесткость
Жесткость характеризуется осязательным откликом на взаимодействие с объектом с силой, перпендикулярной поверхности этого объекта.
Примечание 1 - Отклик может быть линейным с коэффициентом пропорциональным глубине проникновения зонда в объект. Глубина может быть вычислена как расстояние между точкой начала соприкосновения зонда и объекта и конечным положением зонда в виртуальном объекте. Она также может быть рассчитана путем интерполяции положения зонда к ближайшей поверхности объекта.
Примечание 2 - Иногда используют вспомогательный виртуальный объект. Этот объект располагают в точке первоначального контакта, таким образом, что глубина проникновения может быть рассчитана как расстояние между этим объектом и фактическим положением зонда. Поскольку зонд движется внутри исследуемого виртуального объекта, вспомогательный виртуальный объект может перемещаться по недеформированной поверхности исследуемого объекта.
Примечание 3 - На получаемую в итоге оценку жесткости может влиять механическое трение, частота осязательной обратной связи, инерция, механическая жесткость и пространственное разрешение.
8.3.3 Свойства поверхности
8.3.3.1 Общие положения
Поверхность тактильного/осязательного объекта может быть передана с использованием различных свойств. Для передачи наиболее реалистичных ощущений виртуальных объектов могут быть реализованы все нижеперечисленные свойства.
8.3.3.2 Поверхность трения
Разным тактильным осязательным элементам может соответствовать разная сила трения. Сила трения может быть смоделирована различными средствами.
Примечание 1 - Осязательные эффекты на поверхности включают трение покоя - силу, которая препятствует движению в самом начале движения, и динамическое трение - силу, постоянно действующую в направлении, противоположном движению. Динамическое трение может зависеть от скорости движения.
Примечание 2 - Трение может быть смоделировано различными способами.
8.3.3.3 Магнитная поверхность
Магнитная поверхность притягивает контактную точку устройства, когда расстояние между зондом и поверхностью становится меньше определенной величины. Сила притяжения может быть функцией от этого расстояния. Например, она может линейно уменьшаться в зависимости от расстояния.
Примечание - Магнитные поверхности также могут быть названы "липкими", в зависимости от силы притяжения.
8.3.3.4 Текстура
Текстура - это периодические повторяющиеся элементы формы поверхности объекта в микромасштабе. Текстура поверхности может быть активно исследована пользователем.
Примечание 1 - Чтобы сэкономить вычислительные мощности, текстура, как правило, может быть описана в виде произвольного базового элемента, который периодически повторяется по всей поверхности.
Примечание 2 - Способность тактильного/осязательного устройства отображать текстуру зависит от разрешающей способности системы восприятия человека.
8.3.3.5 Шероховатость
Шероховатость отображают с помощью непериодических колебаний профиля поверхности.
Примечание 1 - В отличие от текстуры, имеющей периодические свойства, шероховатость, как правило, обладает стохастическими свойствами. См. рисунок 5.
Примечание 2 - Шероховатость может быть смоделирована с использованием толчков.
Примечание 3 - Тактильные/осязательные элементы могут иметь различную шероховатость. Шероховатость иногда представляют в виде синусоидальной или случайной вариации профиля поверхности.
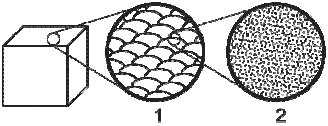
1 - текстура; 2 - шероховатость
Рисунок 5 - Соотношение формы, текстуры и шероховатости
8.3.3.6 Тепловые свойства
Поверхность может иметь определенные тепловые свойства, которые могут быть описаны с помощью температуры и теплопроводности.
Примечание - Если в осязательном пространстве определены тепловые свойства объекта, то это может сформировать высоко реалистичную виртуальную среду.
8.4 Элементы управления
8.4.1 Элементы с осязательной обратной связью
Рабочее пространство тактильного/осязательного взаимодействия может включать в себя элементы управления с осязательной обратной связью, например, кнопки.
Примечание - В дисплеях Брайля такие кнопки используют для маршрутизации.
8.4.2 Элементы без осязательной обратной связи
Рабочее пространство тактильного/осязательного взаимодействия может включать в себя элементы управления без осязательной обратной связи, например, чувствительные к прикосновениям поверхности.
8.5 Использование интерфейса с большим количеством точек контакта
Применение интерфейса "устройство-тело" с большим количеством физических точек контакта пользователя с устройством позволяет задействовать дополнительные тактильные/осязательные элементы взаимодействия, тем самым расширяя диапазон передачи информации.
Пример 1 - Дисплей с двумя точками контакта может передать пользователю усилие сдвига, создавая два разнонаправленных вектора силы.
Пример 2 - В дисплее Брайля используют несколько точек контакта для отображения определенных символов.
8.6 Сочетание элементов и эффектов
Все упомянутые выше элементы и эффекты могут сочетаться друг с другом для создания сложных образцов взаимодействия.
8.7 Различимость
Рекомендуется, чтобы все созданные образцы взаимодействия были протестированы на различимость пользователем.
Примечание - Предполагается, что в будущем в стандартах серии ИСО 9241-900 будут установлены требования к оценке и измерениям тактильных/осязательных взаимодействий.
9 Разнообразие устройств с тактильным/осязательным интерфейсом
9.1 Общие положения
Тактильные/осязательные устройства преимущественно взаимодействуют с человеком либо посредством кожных ощущений, либо посредством сочетания кожных и кинестетических ощущений.
Примечание 1 - Обзор тактильных устройств приведен в приложении A.
Примечание 2 - Обзор тактильных/осязательных устройств, обеспечивающих обратную связь по усилию, приведен в приложении B.
9.2 Критерии выбора
9.2.1 Мобильность
При выборе тактильных/осязательных устройств рекомендуется учитывать необходимую для выполнения задачи мобильность.
Примечание 1 - Портативные устройства могут быть закреплены на спине, плече и/или предплечье или удерживаться за точку подвеса или крепления к телу.
Пример 1 - Экзоскелет руки используют для увеличения силы руки человека. Он может быть укреплен на спине пользователя, но при этом соединен с помощью кабеля со стойкой системы управления и источником питания.
Пример 2 - Мобильный телефон в кармане может быть установлен в режим вибрации, а не в режим подачи звукового сигнала звонка, что позволяет уменьшить шум для окружающих.
Примечание 2 - Стационарные устройства могут быть закреплены на рабочем столе, стене, потолке или полу.
Пример 3 - Экзоскелет руки прикреплен к стене или к напольным приспособлениям позади пользователя.
Пример 4 - Стулья в кино опираются на механизмы, которые вибрируют, встряхивая зрителей для того, чтобы усилить ощущения погружения в кино.
Пример 5 - Пользователь обхватывает рукоять тактильного/осязательного устройства, напоминающую канцелярскую ручку, справа или слева от его визуального дисплея.
9.2.2 Интерфейс "устройство-тело"
При выборе тактильных/осязательных устройств рекомендуется учитывать точки контакта тела с устройством.
Примечание 1 - Человек может воспринимать осязательное воздействие как через прикосновения, так и через кинестетику. Если информацию планируют передавать в основном через прикосновение, а не через ощущения в мышцах при взаимодействиях, то выбирают тактильное устройство.
Пример 1 - Пользователь с полным отсутствием слуха использует тактильный дисплей, передающий звуковые частоты, располагая его на коже живота.
Примечание 2 - В различных устройствах может быть несколько точек контакта. Могут использоваться кончики пальцев, два или более пальца целиком, правая или левая ладонь в разных захватах, обе ладони, одна или две руки, ноги (ступни), или просто носок или пятка ступни.
Пример 2 - В музыкальных инструментах, как правило, используют большое количество точек прикосновения с применением разнообразных жестов при исполнении музыки. Консоль управления органом представляет собой множество клавиш для рук и для ног. Каждая клавиша - это аналог тактильного/осязательного устройства с 1 степенью свободы (1 DOF) (см. 9.2.3).
________________
DOF - степень свободы (англ. degree of freedom).
Примечание 3 - С тактильным/осязательным устройством человек может взаимодействовать посредством активных прикосновений и, таким образом, ощущать, что устройство активно или пассивно. Также такое устройство может быть прикреплено к телу. В этом случае человек ощущает его пассивно.
Пример 3 - Смонтированные на столе тактильные/осязательные устройства, как правило, пользователь удерживает в руках и манипулирует ими при взаимодействии с виртуальным местом действия, доступным для восприятия с помощью осязания.
Пример 4 - Пользователь помещает свой палец на массив штырьков для считывания символов Брайля, перемещая по ним пальцами.
Пример 5 - Мобильный телефон сообщает о личности вызывающего абонента с помощью вибротактильного сигнала.
Примечание 4 - Тактильные устройства могут быть встроены в одежду или предметы, находящиеся в карманах или на теле пользователя. Важно обеспечить механически устойчивое соединение привода с кожей во время всех движений тела. Важно, чтобы соединение не мешало или не раздражало оператора при выполнении других задач. Если привод перестанет прикасаться к коже, то пользователь не сможет чувствовать никакой тактильной обратной связи.
9.2.3 Число степеней свободы
При выборе тактильных/осязательных устройств следует учитывать число степеней свободы, необходимых для выполнения работы.
Примечание 1 - Число степеней свободы связано с размерностью информации, используемой для представления или исследования.
Пример 1 - Информацию о частоте представляют в виде вибрации рукояти с 1 степенью свободы.
Пример 2 - Информацию о маршруте на карте изучают по осязательным сигналам устройства с двумя степенями свободы.
Пример 3 - Сейсмические данные месторождения нефти представлены с помощью изменяющегося сопротивления движению и отображаются устройством с тремя степенями свободы.
Пример 4 - Тренажер по обучению работе с ручным инструментом для технического обслуживания авиационных двигателей предполагает использование устройства с шестью степенями свободы для отображения как крутящего момента, так и усилия.
Примечание 2 - Число степеней свободы осязательной обратной связи может быть меньше или равно числу степеней свободы точки контакта.
Пример 5 - Тактильное/осязательное устройство с шестью степенями свободы имеет стол поступательного перемещения с тремя степенями свободы и обратной связью по усилию с укрепленной на нем рукоятью с тремя степенями свободы ощущаемого вращения, но без обратной связи по крутящему моменту.
Примечание 3 - Устройство с небольшим числом степеней свободы с осязательной обратной связью, как правило, представляет задачу в более общем виде, в то время как устройство с большим числом степеней свободы, как правило, воссоздает задачу более реалистично.
Пример 6 - Устройство с тремя степенями свободы моделирует точку контакта, которая обеспечивает убедительное осязательное представление топографической карты, отображающей участок земной поверхности.
Пример 7 - Устройство с семью степенями свободы (перемещение - 3 DOF, вращение - 3 DOF, захват - 1 DOF) имитирует действие пары хирургических щипцов, используемых для аккуратного захвата и эвакуации удаленного полипа во время процедуры колоноскопии.
Примечание 4 - Тактильное устройство может быть закреплено в одном месте или же может быть смонтировано на тактильных/осязательных устройствах с одной или несколькими степенями свободы.
Пример 8 - Тактильный дисплей Брайля состоит из массива штырьков, закрепленных на направляющей для того, чтобы пользователь скользил по нему пальцами, мог эффективно считывать строки текста Брайля.
Примечание 5 - Размер, плотность и количество раздражителей в тактильном дисплее определяют на основе известного распределения тактильных рецепторов в коже. Каждый раздражитель можно рассматривать как одну независимую степень свободы.
Пример 9 - Массив штырьков делают плотнее в случае, если он предназначен для контакта с кончиками пальцев, нежели чем для контакта с кожей плеча.
Пример 10 - Тактильный массив, предназначенный для использования на спине, имеет большие размеры, чем дисплей для кончиков пальцев, и имеет более низкую плотность раздражителей.
9.2.4 Максимальная жесткость
При выборе тактильных/осязательных устройств рекомендуется учитывать максимальную жесткость, необходимую для выполнения задач.
Примечание 1 - Жесткость связана с ощущением твердости или упругости при исследовании виртуальной поверхности. Как твердые, так и эластичные виртуальные объекты могут проявлять свойство жесткости.
Примечание 2 - Жесткость может быть воспринята как три отдельных качества в осязательном моделировании - четкость начала контакта, твердость жесткой поверхности и четкость отделения от поверхности в завершении контакта. Некоторые из них находятся под управлением программного обеспечения.
Примечание 3 - Высокую максимальную твердость в осязательном дисплее обеспечивает несколько свойств конструкции устройства - пространственное разрешение, временное разрешение, механическая жесткость и трение. Механическая жесткость, как правило, связана с отсутствием паразитных перемещений в сочленениях и шарнирах, жесткостью механических связей и отсутствием растяжения ремней и соединительных элементов.
Пример 1 - Устройство с низким пространственным разрешением способно отображать только мягкие виртуальные поверхности.
Пример 2 - Устройство с высоким пространственным разрешением может отображать жесткие виртуальные поверхности. Те же поверхности могут быть преобразованы в мягкие под управлением программного обеспечения.
Примечание 4 - Удобным тестом для определения максимальной жесткости является представление устройством виртуальной стены с регулируемым коэффициентом упругости и без демпфирования. Максимальная жесткость соответствует наибольшему коэффициенту упругости стены, который может быть передан с помощью устройства, без возникновения вибраций, которые могли бы вывести устройство из стабильного состояния.
Примечание 5 - Более крепкий обхват рукояти устройства может увеличить жесткость, представленную осязательным устройством. Для сравнения необходимо использовать одинаковую силу обхвата, насколько это возможно.
Примечание 6 - Добавление физического демпфирования в устройстве позволяет увеличить жесткость стены, отображаемую без вибраций. Добавление виртуального демпфирования может увеличить жесткость стены, в зависимости от скорости оцифровки.
Пример 3 - Управляемое физическое демпфирование осуществляют с помощью торможения магнитореологической жидкости, изменения направления тока в электродвигателях постоянного тока или изменения магнитного поля, приложенного к вращающемуся алюминиевому диску.
Пример 4 - Тактильное/осязательное устройство, использующее переменное торможение, без работы двигателей не сможет передать усилия оператору. Это ограничивает осязательные эффекты, которые может отображать устройство, но гарантирует стабильность отображения.
9.2.5 Диапазон движений
При выборе тактильных/осязательных устройств рекомендуется учитывать диапазон движений, соответствующий задаче.
Примечание 1 - Диапазон движений определяет рабочее пространство. Диапазон движений устройства определяют в соответствии с запланированным диапазоном движений интерфейса устройство-тело. Этот диапазон движений определяется в основном точкой опоры при движениях тела человека.
Пример 1 - В случае движения человеческой руки точкой опоры может быть плечо, локоть, ладонь или внешняя боковая сторона кисти (как при держании ручки при письме). В приведенном перечне указаны точки опоры в порядке убывания соответствующего рабочего пространства, но в порядке возрастания точности удерживания инструмента.
Примечание 2 - Диапазон движений, как правило, состоит из поступательной и вращательной составляющих. Они могут быть разделены - в последовательных устройствах, или совмещены - в параллельных устройствах.
Примечание 3 - Определение диапазона движений может изменяться в зависимости от числа степеней свободы устройства.
- В устройствах с одной степенью свободы диапазон движений представляет собой максимально достижимое расстояние или угол.
- В устройствах с двумя степенями свободы диапазон движений представляет собой максимально достижимую площадь или телесный угол.
- В устройствах с тремя степенями свободы диапазон движений представляет собой максимально достижимый объем.
- В устройствах с большим числом степеней свободы диапазон движений может представлять собой пространство, ограниченное максимально достижимыми поступательными движениями вместе с соответствующими пределами вращения.
Примечание 4 - Для описания диапазона поступательных движений обычно используют простые геометрические формы.
Пример 2 - Рабочее пространство устройств с тремя степенями свободы может иметь вид параллелепипеда, сферы или эллипсоида.
Примечание 5 - В некоторых устройствах вращение рукояти может быть ограничено вблизи границ рабочего пространства.
9.2.6 Сила и крутящий момент
9.2.6.1 Пиковое усилие и пиковый крутящий момент
При выборе тактильных/осязательных устройств рекомендуется учитывать необходимые для выполнения задачи пиковые усилие и крутящий момент.
Примечание 1 - Необходимо учитывать возможности предполагаемого оператора. Пиковое усилие оператор может прилагать только в течение короткого промежутка времени, после чего наступает мышечная усталость.
Примечание 2 - В устройствах с одной, двумя и тремя степенями свободы обычно используют только усилие. Совместно усилие и крутящий момент, в основном, используют в устройствах с более чем тремя степенями свободы.
Пример 1 - При моделировании крутящего момента и нажима отвертки используют более трех степеней свободы.
Примечание 3 - Пиковый крутящий момент может быть краткосрочным и продолжаться не более 10 мс.
Пример 2 - Для выполнения пункции кости (при моделировании) необходимо воспроизведение высокого краткосрочного усилия.
Примечание 4 - В некоторых задачах может потребоваться приложение пикового усилия более 5 с.
Пример 3 - В хирургическом моделировании нажима на позвонок для смещения позвоночника может потребоваться приложение продолжительного значительного пикового усилия.
9.2.6.2 Максимальное продолжительное усилие и крутящий момент
При выборе тактильных/осязательных устройств рекомендуется учитывать максимальное продолжительное усилие и крутящий момент, необходимые для выполнения задачи.
Примечание 1 - Усталость и дискомфорт, ощущаемые пользователем становятся меньше, если продолжительные усилия составляют небольшую долю усилия, возникающего при максимальном сознательном сокращении мышц. При более высоком значении этого отношения важно правильно подобрать соотношение продолжительности работы и отдыха.
Примечание 2 - В электромеханических тактильных/осязательных устройствах воздействие продолжительного непрерывного усилия или крутящего момента приводит к останову и перегреву двигателя. В таких случаях ограничивающим параметром является максимальная температура, при которой двигатель сохраняет работоспособность.
9.2.6.3 Минимальные отображаемые усилие и крутящий момент
При выборе тактильных/осязательных устройств рекомендуется учитывать минимальные отображаемые усилие и крутящий момент, необходимые для выполнения задач.
Примечание 1 - Для некоторых деликатных задач (при работе с очень мелкими объектами) целесообразно использование слабых усилий.
Пример 1 - Моделирование использования инструментов для сборки часов подразумевает использование малых усилий. Некоторые компоненты часов могут быть повреждены при слишком сильном нажатии.
Пример 2 - Нейрохирурги работают с очень чувствительной тканью и поэтому прилагают к хирургическим инструментам небольшие усилия.
Примечание 2 - Для отображения небольших усилий целесообразно использовать тактильное/осязательное устройство с низким коэффициентом трения.
9.2.6.4 Разрешающая способность усилия и крутящего момента
При выборе тактильных/осязательных устройств рекомендуется учитывать разрешающую способность силы и крутящего момента, соответствующую задаче.
Примечание 1 - В некоторых задачах необходимо, чтобы уровни используемых усилий и крутящего момента были хорошо различимы.
Пример - Могут иметь значение небольшие различия в усилиях, применяемых при пальпации тканей тела (т.е. при обследовании тканей человека для определения их состояния).
Примечание 2 - Для создания необходимой разрешающей способности используемых усилий подходят тактильные/осязательные устройства с низким коэффициентом трения.
9.2.6.5 Динамический диапазон усилий и крутящего момента
При выборе тактильных/осязательных устройств рекомендуется учитывать динамический диапазон отображаемых усилий и крутящего момента, соответствующий задаче.
Примечание - Динамический диапазон - это отношение пикового усилия к минимальному отображаемому усилию.
Пример - Моделирование в ортопедической хирургии включает в себя как большие усилия для имитации работы с костями, так и малые усилия для имитации прикосновения к тканям в непосредственной близости от кости.
9.2.7 Сопротивление перемещению в свободном пространстве
При выборе тактильных/осязательных устройств рекомендуется учитывать сопротивление перемещению в свободном пространстве, соответствующее задаче.
Примечание 1 - Низкий уровень сопротивления перемещению в свободном пространстве указывает на возможность перемещения тактильного/осязательного устройства с минимальным противодействием по всему рабочему пространству. В идеале, устройство не должно передавать никаких усилий на руки пользователя, если взаимодействия с объектами в виртуальном мире не происходит.
Пример 1 - Тактильное/осязательное устройство с посторонними шумами в передаточном механизме может привнести осязательные эффекты, маскирующие основное осязательное отображение.
Примечание 2 - Сопротивление перемещению в свободном пространстве может быть вызвано как постоянными, так и переменными силами. К постоянным силам можно отнести силы, зависящие от передаточного коэффициента механизма, силы трения и инерции. Переменные силы возникают в результате воздействия вибраций передаточного механизма, наличия люфта в сочленениях деталей и недостаточной жесткости трансмиссии.
Пример 2 - В бесщеточном моторе, как правило, происходят пульсации крутящего момента, которые периодически ощущаются как неоднородность вращения вала двигателя. Эти пульсации формируют изменяющееся сопротивление вращению.
Примечание 3 - Каждой степени свободы может соответствовать свое значение сопротивления перемещению в свободном пространстве.
Пример 3 - Устройство может иметь большую инертность при перемещении рукояти, чем при ее вращении.
9.2.8 Инертность
При выборе тактильных/осязательных устройств рекомендуется учитывать инертность интерфейса "устройство-тело".
Примечание 1 - Инертность проявляет себя в сопротивлении перемещению в свободном пространстве как масса, ощущаемая пользователем при взаимодействии с интерфейсом "устройство-тело".
Пример - Взаимодействие с тактильным/осязательным устройством с большой инертностью труднее начать и труднее завершить.
Примечание 2 - В зависимости от числа степеней свободы и конструкции устройства может существовать инерция поступательного движения, выражаемая в единицах массы, и инерция вращательного движения, выражаемая в единицах массы, умноженной на квадрат расстояния.
Примечание 3 - Инертность может быть частично устранена с помощью использования алгоритмов управления, таких как обратная связь по усилию или ускорению, но это может привнести другие зависимости, такие как отклонения частоты.
9.2.9 Пиковое ускорение
При выборе тактильных/осязательных устройств рекомендуется учитывать пиковое ускорение в интерфейсе "устройство-тело".
Примечание 1 - Пиковое ускорение вызывает пиковая сила, появляющаяся за счет инерции.
Примечание 2 - Высокое пиковое ускорение проявляется при контакте и импульсах, которые вызывают быстрое изменение скорости.
9.2.10 Трение
9.2.10.1 Статическое трение
При выборе тактильных/осязательных устройств рекомендуется учитывать ограничения задачи по статическому трению.
Примечание 1 - Статическое трение - это сопротивление перемещению интерфейса "устройство- рукоять" из неподвижного положения.
Примечание 2 - На низких скоростях статическое трение приводит к появлению прерывистого движения, которое можно описать как "прилипание-скольжение". Это может стать причиной выхода устройства из стабильного состояния при попытке моделирования виртуальной стены.
9.2.10.2 Динамическое трение
При выборе тактильных/осязательных устройств рекомендуется учитывать ограничения задачи по динамическому трению.
Примечание 1 - Трение проявляется как сопротивление свободному перемещению в пространстве. Это ощущаемое сопротивление в интерфейсе "устройство-тело". Сила трения всегда направлена в сторону противоположную направлению перемещения.
Примечание 2 - Динамическое трение, как правило, подразделяют на трение Кулона (трение, не зависящее от скорости) и вязкое трение или демпфирование (трение пропорциональное скорости).
Примечание 3 - В идеале, тактильные/осязательные устройства должны иметь минимальное динамическое трение, позволяя пользователю добавлять программно-управляемое виртуальное трение, если это необходимо для визуализации виртуальной среды.
Пример - Некоторые алгоритмы управления добавляют виртуальное демпфирование, чтобы улучшить ощущение прикосновения к виртуальной поверхности. Некоторые ученые пробовали использовать управляемое физическое демпфирование для поглощения энергии и пассивной визуализации виртуальной стены.
9.2.11 Временные параметры
9.2.11.1 Полоса пропускания
При выборе тактильных/осязательных устройств рекомендуется учитывать полосу пропускания, соответствующую задаче.
Примечание 1 - Полоса пропускания - это диапазон частот, в пределах которого тактильное/осязательное устройство обеспечивает обратную связь с пользователем. Часто полосой пропускания называют верхнюю границу частот, однако нижняя граница частот также является характеристикой полосы пропускания.
Примечание 2 - Возможности осязательных ощущений человека имеют значительно большую полосу пропускания, чем полоса пропускания мышечной реакции.
Пример 1 - Тактильная система восприятия человека, как правило, получает сигналы от кожи в частотном диапазоне от 0 до 1000 Гц (хотя были зарегистрированы и более высокие значения).
Пример 2 - Кинестетическая система восприятия человека получает сигналы от мышц и суставов на частотах от 20 до 30 Гц. Пальцы и кисти рук могут двигаться с частотой от 5 до 10 Гц.
Примечание 3 - Усталость и различные физиологические процессы могут быть факторами, влияющими на изменение полосы пропускания системы восприятия человека.
Пример 3 - Сигналы, появляющиеся в одном и том же месте кожи в течение короткого промежутка времени, могут маскировать друг друга.
Примечание 4 - Полоса пропускания тактильного/осязательного устройства обычно относится ко всему циклу осязательной обратной связи. Полоса пропускания в таком случае - это количество осязательных циклов, которое может произойти за секунду (эта характеристика также известна как частота обновления).
Пример 4 - В импедансном тактильном/осязательном устройстве, осязательный цикл последовательно включает в себя определение положения зонда в устройстве, повторение осязательного моделирования, вычисление усилия и/или крутящего момента и передачу команд о формировании силы/крутящего момента тактильному/осязательному устройству.
Пример 5 - В тактильном/осязательном устройстве, воспринимающем усилия пользователя, осязательный цикл последовательно включает в себя восприятие усилия в устройстве, повторение осязательного моделирования, вычисление положения и передачу команд позиционирования осязательному устройству.
Примечание 5 - Полоса пропускания зависит от таких факторов, как скорость оцифровки сигналов датчиков в тактильном/осязательном устройстве, время задержки сигналов связи тактильного/осязательного устройства с управляющим компьютером, и время, необходимое для повторения осязательного моделирования и обработки информации для передачи ее обратно в тактильное/осязательное устройство. Также могут существовать ограничения возможностей устройства по отображению усилия и крутящего момента в необходимом диапазоне частот.
Пример 6 - Тактильное/осязательное устройство способно генерировать силу с частотой от 0 до 1000 Гц. Если измерения положения производятся на частоте 10 кГц, то управляющие сигналы формируются с более высокой частотой, чем частота, с которой прибор способен генерировать силу. Это может снизить нестабильность работы устройства, возникающую в процессе моделирования.
Примечание 6 - Механический импеданс тела пользователя в интерфейсе "устройство-тело" может влиять на воспринимаемую полосу пропускания тактильного/осязательного устройства.
Пример 7 - Пользователь захватывает ручку тактильного/осязательного устройства твердо, с напряжением кисти и руки, тем самым снижая способность устройства отображать силу в широком диапазоне частот. В таком случае кожные сенсоры могут быть сдавлены рукоятью и не воспринимать слабые вибрации устройства.
9.2.11.2 Задержка системы
Задержку системы можно рассматривать как альтернативную характеристику полосы пропускания осязательной системы.
Примечание - Задержка системы - это общее время задержки компонентов осязательного цикла. Задержка системы - это величина, обратная частоте обновления.
Пример - В регуляторе сопротивления задержка включает в себя время вычисления прямой и обратной кинематики устройства, задержку передачи информации от устройства к компьютеру управления и время вычисления усилий и крутящего момента, передаваемых пользователю на выходе осязательного тренажера.
9.2.11.3 Задержка устройства
Задержку устройства можно рассматривать как зависящую от конструкции устройства величину, которая влияет на полосу пропускания осязательной системы.
Примечание 1 - Задержка устройства - это промежуток времени (запаздывание) между посылкой команды тактильному/осязательному устройству и появлением ответной реакции этого устройства. Как правило, она включает прямую и обратную кинематику, которую в действительности можно было бы рассчитать на компьютере управления.
Примечание 2 - На задержку устройства может влиять быстродействие компьютера управления, а также как и любые задержки, присущие самому тактильному/осязательному устройству. Быстродействие компьютера управления может включать в себя скорость вычислений центрального процессора, время доступа к памяти и время доступа к любым картам ввода/вывода на вспомогательной компьютерной шине.
9.2.12 Факторы окружающей среды
9.2.12.1 Акустический шум
При выборе тактильных/осязательных устройств рекомендуется учитывать уровень акустического шума устройства.
Примечание 1 - Высокий акустический шум тактильного/осязательного устройства может создать дискомфортную рабочую обстановку.
Примечание 2 - Акустический шум может возникать в вентиляторах охлаждения или из-за механических вибраций, которые возникают в ходе выполнения задачи.
Пример - Если задача требует отображения жестких виртуальных поверхностей, а тактильное/осязательное устройство с плохим пространственным разрешением пытается отобразить такие поверхности может появляться повышенный акустический шум.
9.2.12.2 Вес
При выборе тактильных/осязательных устройств рекомендуется учитывать вес устройства, которое может потребоваться перемещать в процессе выполнения задачи.
Примечание 1 - Для обеспечения стабильности устройства может быть необходим тяжелый вес, но это затрудняет перемещение устройства.
Пример - Отображение высокого пикового усилия в горизонтальном направлении требует использования тяжелого и/или широкого основания, или даже фиксации устройства на неподвижной опоре.
Примечание 2 - Вес электронных блоков и кабелей также следует учитывать при оценке веса устройства.
9.2.12.3 Размеры
При выборе тактильных/осязательных устройств рекомендуется учитывать размеры устройства.
Примечание 1 - Размеры тактильного/осязательного устройства могут влиять на его размещение в помещении лаборатории или офиса.
Примечание 2 - Размеры устройства в определенной степени зависят от размеров рабочего пространства тактильного/осязательного устройства.
Пример - Большее рабочее пространство предполагает более крупное устройство, так как могут понадобиться массивная основа и механические устройства, обеспечивающие доступ к объектам, расположенным на значительном расстоянии, для возможности перемещения интерфейса "устройство-тело" по всему рабочему пространству.
Примечание 3 - Размеры электронных блоков и кабелей также следует учитывать при оценке размеров устройства.
9.2.13 Безопасность
9.2.13.1 Механическая безопасность
9.2.13.1.1 При выборе тактильных/осязательных устройств рекомендуется учитывать механическую безопасность устройства.
9.2.13.1.2 Следует устранить или снизить риск опасного контакта пользователя с вращающимися частями механизмов.
Пример 1 - Пользователь сидит вне рабочего пространства устройства, чтобы избежать удара рукоятью, которая могла бы столкнуться с одной из механических частей устройства.
Пример 2 - Ограничение усилия в тактильном/осязательном устройстве позволяет снизить усилия контакта с телом пользователя.
9.2.13.1.3 Следует предусмотреть способы выключения устройства, когда пользователь прекращает его удерживать.
Пример 1 - Тактильное/осязательное устройство оснащено контактным датчиком, реагирующим на захват пользователем рукояти устройства. Когда рукоять отпущена, то устройство автоматически удерживается в фиксированном или отключенном состоянии, что позволяет предотвратить его неуправляемое перемещение.
Пример 2 - Управляющее программное обеспечение для тактильного/осязательного устройства имеет детектор "неуправляемости", который выключает двигатели при обнаружении неуправляемого перемещения в одной или нескольких степенях свободы.
9.2.13.1.4 Пользователь устройства всегда должен иметь возможность отсоединиться от него.
Пример - Если тактильное устройство чрезмерно воздействует на кожу пользователя, что может вызвать раздражение кожи или ее повреждение, то пользователь просто снимает устройство, для предотвращения дальнейшего раздражения или повреждения кожи.
9.2.13.2 Электробезопасность
9.2.13.2.1 При выборе тактильных/осязательных устройств рекомендуется учитывать электробезопасность устройства.
9.2.13.2.2 Рекомендуется обеспечить защиту пользователя устройства от опасного напряжения.
9.2.13.2.3 Для обеспечения безопасности устройства должны быть соблюдены установленные электротехнические нормы и правила.
Пример - Для блока электропитания устройства от линии электроснабжения используют стандартный разъем с заземляющим контактом.
9.2.13.2.4 Если происходит сбой электропитания, устройство должно перейти в безопасное состояние.
Пример - Экзоскелет может быть закреплен на опоре и охватывать руки пользователя. Устройство должно быть настолько сбалансированным, чтобы при сбоях электропитания вес устройства не подвергал пользователя опасности.
9.2.13.3 Термическая безопасность
При выборе тактильных/осязательных устройств рекомендуется учитывать требования термической безопасности.
Примечание - Приводы и вспомогательная электроника во время работы тактильного/осязательного устройства могут значительно нагреваться.
Пример 1 - Если движение устройства остановилось возле виртуальной стены, и двигатель не производит работу, то энергия, сообщаемая двигателю, превращается в тепло.
Пример 2 - Большое внимание уделяется тому, чтобы пользователь был защищен от контакта с горячими поверхностями.
9.2.14 Учет позы
9.2.14.1 Рабочее положение
При выборе тактильных/осязательных устройств рекомендуется учитывать рабочее положение пользователя, предусмотренное для работы с данным устройством.
Примечание 1 - Некоторые устройства могут быть спроектированы с расчетом на то, что оператор будет работать в позе стоя, в то время как другие - для работы в позах сидя или лежа.
Пример 1 - Для пользователя, который во время выполнения задачи находится в позе сидя, использован вибрирующий стул.
Пример 2 - Экзоскелет разработан для пользователя, который управляет устройством в позе стоя.
Примечание 2 - Некоторые позы более утомительны, чем другие. Для задач с большой продолжительностью важно учитывать комфорт пользователя. Например, устройство может позволить пользователю менять позу в процессе выполнения задачи.
9.2.14.2 Поддержка конечностей
При выборе тактильных/осязательных устройств рекомендуется учитывать поддержку конечностей пользователя во время выполнения задачи.
Примечание - Для некоторых осязательных задач можно предполагать, что оператору будет необходимо вытянуть руку или ногу, управляя устройством. Для комфорта оператора важно предусмотреть подлокотники или опоры для ног при необходимости.
Пример - Стоит учесть, что во время работы устройством с тремя степенями свободы, пользователь может убрать руку со стола на длительное время. Если для выполнения задачи требуется приподнятое и относительно неподвижное положение руки, то предусматривают опору для предплечья.
9.2.15 Возможности адаптации
9.2.15.1 Модификация
При выборе тактильных/осязательных устройств рекомендуется учитывать возможную модификацию устройства, необходимую для выполнения задачи.
Примечание - Исследовательская работа иногда требует определенной модификации устройств для того, чтобы они лучше соответствовали обстоятельствам, возникающим в ходе исследований.
Пример 1 - Чтобы исследовать новый алгоритм в интерфейс "устройство-тело" добавляют новую рукоять с тензодатчиком (датчик усилия).
Пример 2 - Для моделирования ощущений в руках от хирургических инструментов на тактильное/осязательное устройство вместо исходной рукояти монтируют новую рукоять.
9.2.15.2 Управляемость
При выборе тактильных/осязательных устройств рекомендуется учитывать специальные элементы управления устройством, соответствующие задаче.
Примечание - Можно управлять функционированием тактильного/осязательного устройства с помощью использования кнопок на рукояти, или с помощью программных команд, которые изменяют отдельные характеристики устройства.
Пример 1 - Нажатие кнопки производит "шаговое перемещение" или "индексацию" - перемещение устройства к новому месту в его виртуальном рабочем пространстве так, чтобы реальное рабочее пространство тактильного/осязательного устройства заняло более удобное положение относительно виртуального рабочего пространства.
Пример 2 - В случае необходимости перекалибровки датчиков эта процедура легко осуществима, и необходимость в этом возникает достаточно редко при выполнении задач.
Пример 3 - Начальное положение рукояти устройства служит также в качестве опорного положения при калибровке датчика угла устройства.
9.2.15.3 Установка
При выборе тактильных/осязательных устройств рекомендуется учитывать легкость их установки.
Примечание 1 - В большинстве случаев тактильное/осязательное устройство остается на месте его установки в течение длительного времени.
Примечание 2 - Если есть необходимость перемещения устройства, легкость замены компьютеров управления может быть важным фактором при выборе устройства.
9.2.15.4 Надежность
При выборе тактильных/осязательных устройств рекомендуется учитывать надежность устройства.
Примечание 1 - Предпочтительно, чтобы тактильные/осязательные устройства работали в течение длительного времени без необходимости ремонта, осуществляя бесперебойную работу в выбранных условиях использования.
Примечание 2 - Важно, чтобы выпускаемые устройства были качественно отрегулированы и протестированы до передачи их заказчику.
Примечание 3 - Важно, чтобы тактильные/осязательные устройства выдерживали транспортировку без повреждений при соблюдении инструкций изготовителя по транспортировке.
9.2.15.5 Обслуживание
9.2.15.5.1 При выборе тактильных/осязательных устройств рекомендуется учитывать простоту обслуживания устройства.
Примечание - Следует заранее предусмотреть возможность ремонта тактильного/осязательного устройства.
9.2.15.5.2 Следует заранее оценить необходимые сроки и сложность проведения технического обслуживания.
9.2.15.5.3 В идеале стандартные процедуры технического обслуживания необходимо выполнять на месте, а более сложное техобслуживание должны проводить соответствующие службы с минимальными затратами времени.
9.2.15.5.4 У пользователя при покупке устройства должно быть четкое понимание гарантии изготовителя (состав гарантийных обязательств и продолжительность срока гарантии).
9.2.16 Точность
При выборе тактильных/осязательных устройств рекомендуется учитывать точность устройства при выполнении задач.
Примечание 1 - Точность - это способность осязательной системы достаточно реалистично моделировать взаимодействия. Точность также иногда называют "прозрачностью" осязательной системы - т.е. способностью системы убедить пользователя в том, что он взаимодействует непосредственно с осязательными объектами.
Пример - Тактильные/осязательные устройства могут быть частью перехода в виртуальную реальность, которая погружает пользователя в окружение другого мира, виртуальной среды, например, микроскопический хирургический стол, угольная шахта или корабль в космическом пространстве. Впечатление "присутствия" у человека усиливается за счет осязания совместно с другими модальностями восприятия.
Примечание 2 - Устройство с высокой точностью предполагает наличие датчиков с высокой разрешающей способностью, быструю бесшумную ответную реакцию приводов, малые компьютерные задержки и прозрачную передачу усилий, крутящего момента и/или тактильных ощущений пользователю.
Приложение А
(справочное)
Тактильные устройства
А.1 Общие положения
Данное приложение описывает ряд тактильных устройств чаще всего встречающихся на момент публикации настоящего стандарта; тем не менее, оно также применимо к другим тактильным устройствам.
Устройства на точечной основе (например, вибропривод пейджера), вибрируют в одной-единственной точке. В устройствах с матричным расположением штырьков (например, в обновляемых дисплеях Брайля) есть массив штырьков, которые могут быть прижаты к коже. Дисплеи на точечной основе можно носить в комплекте по нескольку штук на поверхности тела.
А.2 Пейджеры/телефоны с функцией вибрации
Пейджеры или мобильные телефоны с функцией вибрации содержат привод, обычно вращающий, но иногда и линейно перемещающий, некоторую массу на высокой скорости (см. рисунок А.1). Изменения направления движения массы приводят к возникновению колебаний. В альтернативном варианте, движущуюся на высокой скорости массу резко останавливают. Это вызывает появление жестких тактильных толчков. Если это происходит, например, в мобильном телефоне, который можно носить в кармане, то колебания передаются на кожу. Эти колебания воздействуют на кожу, что вызывает осязательные ощущения. Интенсивность ощущений можно варьировать изменением частоты колебаний, поскольку от нее зависят механический контакт и фактическое ощущение вибраций. Качество восприятия вибраций можно повысить с помощью тщательного подбора образцов последовательностей колебательных толчков.
Рисунок A.1 - Вибрационный электродвигатель с эксцентрично расположенной массой
А.3 Линейный тактильный привод
Другим методом создания точечных вибраций на теле является линейный привод. Контактор в устройстве, показанном на рисунке 2, является движущейся массой, которая установлена выше корпуса и прижата к коже. Он обеспечивает местную обратную связь, поскольку вибрирует только точка контакта (точка в центре), а не устройство в целом (как это происходит в обычном мобильном телефоне, содержащем вибрационный привод). Такие устройства, как правило, резонируют на частоте около 250 Гц, но спроектированы так, чтобы иметь возможность воспроизводить некоторый диапазон частот, в отличие от большинства простых приводов мобильных телефонов, которые имеют ограниченную частотную характеристику.
Рисунок A.2 - Линейный тактильный привод
А.4 Вибрационный джойстик
Вибрационные джойстики широко распространены в области консольных видеоигр. Эти устройства содержат один или несколько приводов, сравнимых с приводами, используемыми в вибрирующих пейджерах/телефонах, но с большей массой и, поэтому, с большей механической энергией. Управление приводом зависит от действий, происходящих в видеоигре. Если в одной рукояти монтируют несколько приводов, тогда некоторым образцом последовательности вибрационных толчков может быть закодирована информация с выраженной направленностью.
А.5 PB-дисплеи
PB-дисплеи (pin-based) возникли в приложениях с алфавитом Брайля. Тактильные элементы (штырьки), которые использованы в этих видах дисплеев, расположены перпендикулярно поверхности кожи. Как правило, каждый штырек подключен к приводу, который действует на основе одного конкретного физического принципа, например, теплового, электромагнитного, электродинамического, электро-статического, пьезоэлектрического, сверхзвукового, пневматического или гидравлического. Привод способен изменять высоту штырька в зависимости от управляющего сигнала. Обычно изменение дискретное, имеющее два оцифрованных состояния (поднят или опущен), но также может быть непрерывным для кодирования дополнительной информации. Как правило, PB-дисплеи состоят из комплектов плотно установленных приводов для создания большой площади осязательного взаимодействия (см. рисунок А.3).
________________
Pin-based - основанные на массиве штырьков.
Примечание - Вопрос о реальной разрешающей способности PB-дисплеев в зависимости от расстояния между штырьками является предметом интенсивного обсуждения и окончательно еще не решен. Кроме того, сочетание ощущения сдвига и тот факт, что пользователи могут быть очень хорошо обучены восприятию штырьков, по-прежнему создает трудности для определения детерминированных критериев проектирования.
Рисунок A.3 - Дисплей Брайля (PB-дисплей) как часть клавиатуры компьютера
Существует два возможных типа конструкции тактильных устройств, различаемых по способу перемещения и информации, передаваемой пользователю. Устройства первого типа отображают информацию с временной зависимостью. В устройствах этого типа для считывания информации палец пользователя перемещается относительно поверхности устройства. В другом типе устройств палец опирается на тактильный элемент, который является частью подвижного устройства, считывающего распределенную информацию за счет передвижения. Примером последнего варианта является тактильный дисплей, встроенный в компьютерную мышь (см. рисунок А.4). Матрица штырьков у мыши имеет более высокое разрешение, чем в дисплее Брайля, и может быть использована для представления других форм информации, таких как иконки, диаграммы или карты.
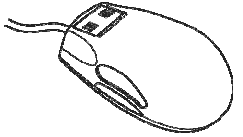
Рисунок А.4 - Тактильная мышь
А.6 Сдвиговые дисплеи
Сдвиговые дисплеи - это устройства, которые производят сдвиг прилегающих участков кожи. Использование сдвига вызвано тем, что восприятие отдельных поднятых штырьков PB-дисплеев улучшается, если возможно движение штырьком по поверхности кожи. Сдвиг кожи является очень важным фактором повседневной жизни для надежного захвата и удержания объектов.
Сочетание сдвига с отклонением от вертикального положения приводит к увеличению чувствительности. Существует несколько технических реализаций сдвиговых дисплеев, в том числе вращающиеся барабаны поверх вибрационных пьезоэлектрических дисков и поверхностные волны. Ощущение сдвига может также использоваться для создания ощущений, подобных тем, которые возникают при работе с PB-дисплеями.
А.7 Вибрирующие жилеты и пояса
В случае, когда необходимо задействовать части тела с далеко удаленными друг от друга точками контакта, для передачи пространственно-распределенной тактильной информации возможно использование отдельных дискретных приводов вместо набора приводов. Для этой цели часто выбирают вибрирующие приводы. Были проведены исследования с вибрирующими приводами, вмонтированными в жилеты и ремни, что позволяло проектировать на поверхность тела поверхностную или пространственную информацию (см. рисунок А.5). Эти исследования привели к применению вибрирующих жилетов и поясов в различных задачах - от навигации и ориентации в пространстве до обучения сложным движениям. Однако число вибраций, которые пользователь может воспринимать одновременно, ограничено.
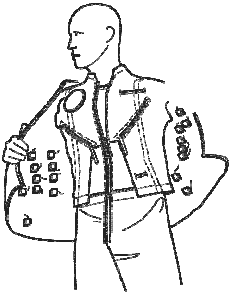
Рисунок A.5 - Тактильный жилет для использования в военных целях
А.8 Термические устройства
Существуют устройства, основанные на восприятии температуры. Такие устройства обычно состоят из множества нагреваемых электродов, обеспечивая пространственную информацию о распределении тепла. Трудности, связанные с использованием этой технологии, заключаются в недостаточном знании о восприятии тепловых воздействий и сложности моделирования обратной реакции системы кожной терморецепции человека в самом устройстве.
А.9 Электрические устройства
Другой способ раздражения рецепторов, расположенных в коже, состоит в использовании воздействия на кожу электрического тока (переменного). Устройства этого вида активизируют все рецепторы одновременно, вызывая некоторые осязательные ощущения. Большое преимущество этого подхода - высокое разрешение, достигаемое с помощью очень простых средств. Однако следует учитывать, что электрическая стимуляция в значительной степени зависит от изменяющихся со временем параметров электрического контакта с кожей, в том числе электронной и ионной проводимости кожи. Кроме того, электростимуляция всегда активирует нервные волокна, ответственные за болевую чувствительность (ноцицепцию).
Примечание - См. особенности болевой чувствительности в С.2.4.
Приложение B
(справочное)
Тактильные/осязательные устройства с обратной связью по усилию
В.1 Общие положения
В данном приложении описаны тактильные/осязательные устройства с обратной связью по усилию, наиболее распространенные в настоящее время. Данное приложение также применимо к другим устройствам такого типа.
В.2 Осязательное устройство с вращающимся регулятором
Осязательные устройства с вращающимся регулятором (см. рисунок В.1) являются типичными для взаимодействий с одной степенью свободы. Они имеют один привод, управляющий ручкой в форме выпуклой кнопки или колесика либо непосредственно, либо через редуктор с небольшим передаточным отношением. Зависимость крутящего момента от угла поворота программируют в соответствии с решаемой задачей. Как правило, в этих устройствах запрограммирована одна или несколько кривых изменения характеристик. Затем происходит выбор одной из этих кривых с помощью протокола, передаваемого в устройство по шине управления. Устройства передают информацию о событиях головной системе в случае выбора определенной функции. Такие устройства обычно используют в автомобилях для совмещения средств управления радио, кондиционером и мультимедийными функциями в одном рабочем устройстве.
Рисунок В.1 - Осязательное устройство с вращающимся регулятором
В.3 Джойстик с обратной связью по усилию
Джойстик, обеспечивающий обратную связь по усилию (см. рисунок В.2), является устройством управления, предназначенным преимущественно для использования в игровой индустрии. Такое устройство имеет несколько приводов для изменения жесткости и амортизации движения как минимум в двух управляющих направлениях. Кроме того, эти приводы могут формировать выходное усилие для пользователя. Положение джойстика в управляющих направлениях измеряется и передается головной системе (персональный компьютер). В основном приложения формируют осязательные сигналы с одной или более кинестетическими степенями свободы для имитации воздействия оружия на виртуальный персонаж или столкновения с объектами в игровом сценарии.
Рисунок В.2 - Джойстик с обратной связью по усилию
В.4 Рулевое колесо и педали с обратной связью по усилию
Рулевое колесо и педали, которые обеспечивают обратную связь по усилию, являются управляющими устройствами, напоминающими рулевое колесо автомобиля и его педали акселератора и тормоза (см. рисунок В.3). Эти устройства разрабатываются в основном для игровой индустрии и используют интерфейс персонального компьютера в качестве головной системы. Они содержат несколько приводов, формируя выходной крутящий момент и усилие на одном из элементов управления, и передают системе информацию об угле поворота руля и интенсивности перемещения педалей.
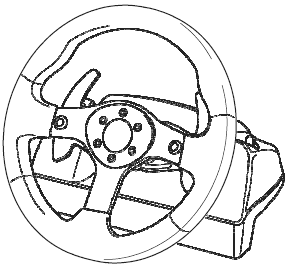
Рисунок В.3 - Рулевое колесо, обеспечивающее обратную связь по усилию
В.5 Координатно-указательные устройства
В координатно-указательных устройствах используют указатель с тремя степенями свободы (см. рисунок В.4). Этот указатель физически представляет собой ручку, которая может иметь различные формы в зависимости от вариантов использования. Как правило, к таким устройствам предъявляют требования высокой жесткости конструкции и возможности их работы в существенно ограниченном рабочем пространстве пользователя. Поэтому такие устройства часто разрабатывают как параллельные механизмы. Количество приводов в таких устройствах больше или равно числу степеней свободы кинестетической обратной связи. Такие координатно-указательные устройства обычно работают вместе с персональными компьютерами. Устройства получают информацию об усилии, которое необходимо передать, и возвращают информацию о позиционировании указателя головному компьютеру.
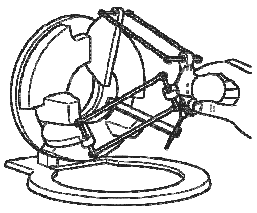
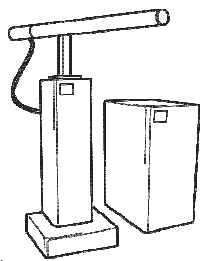
Рисунок B.4 - Координатно-указательные осязательные устройства
В.6 Тактильные устройства со стилусом
Тактильные устройства с стилусом (см. рисунок В.5) определяют положение точки в трехмерном пространстве с помощью прикрепленного стилуса. В дополнение к информации о положении точки определяют ориентацию этого стилуса и, в зависимости от системы, стилус частично или полностью оснащен кинестетической обратной связью. Тактильные устройства со стилусом широко применяют в приложениях, использующих трехмерное моделирование, для разработки дизайнерских решений, в киноиндустрии и в индустрии моды. Такие устройства позволяют управлять виртуальным стилусом, заменяющим реальные инструменты для создания скульптур, рисования или письма.
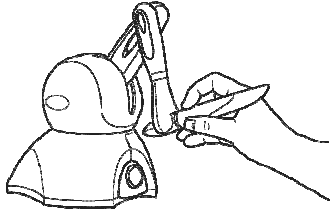
Рисунок В.5 - Осязательное устройство со стилусом
В.7 Осязательные устройства, закрепленные на руке
Осязательные устройства, закрепленные на руке (см. рисунок В.6), представляют собой сложные механические устройства, обеспечивающие кинестетическую обратную связь с одним или несколькими пальцами. Такие устройства отличаются по функциональности и сложности в соответствии с числом степеней свободы, доступных для пальца, и общего количества пальцев с кинестетической обратной связью. Из-за существенного веса таких устройств их иногда комбинируют с дополнительными координатно-указательными осязательными устройствами, которые компенсируют механическую нагрузку на руку пользователя.
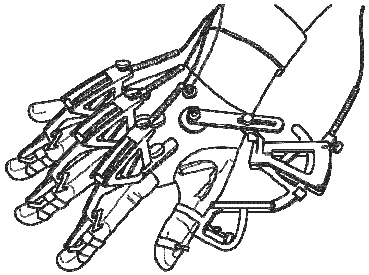
Рисунок В.6 - Осязательное устройство, закрепленное на руке
В.8 Мышь с обратной связью по усилию
Мышь, обеспечивающая обратную связь по усилию, представляет собой приспособление, в котором к двумерному перемещению компьютерной мыши по поверхности добавлена кинестетическая обратная связь. В такой мыши установлены приводы, которые обычно затрудняют перемещение в процессе взаимодействия. В качестве возможных применений этой функции может быть использование ощутимых толчков на корпусе мыши при наведении курсора на кнопки или другие области с конкретной функциональностью в компьютерной программе. Однако существуют варианты такого типа мыши с активными кинестетическими свойствами, в том числе с вибрационным элементом или с матрицей тактильных штырьков.
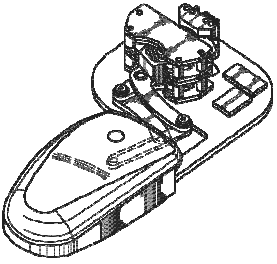
Рисунок В.7 - Мышь с обратной связью по усилию
Приложение C
(справочное)
Физиология осязания
C.1 Соматосенсорная система
Прикосновения и кинестетика - две составные части соматосенсорной системы человека. Эта система включает в себя чувствительные рецепторы в коже и в эпителии, в мышцах скелета, костях и суставах, внутренних органах и в сердечнососудистой системе. Рецепторы в мышцах и суставах вызывают кинестетические ощущения, тогда как кожные рецепторы способствую возникновению ощущений прикосновения. В медицинских терминах эти ощущения собирательно называют "соматическими чувствами".
Кожные рецепторы подразделяют на терморецепторы, механорецепторы, хеморецепторы и ноцицепторы (свободные нервные окончания, чувствительные к боли, см. С.2.4). Нервы от различных рецепторов через спинной мозг идут в теменную (париетальную) долю коры головного мозга (см. рисунок С.1). Складка в теменной доле, "постцентральная извилина", содержит область на поверхности мозга, в которую поступают сенсорные сигналы кожных рецепторов. Эта зона является первичной соматосенсорной областью, ее можно представить в форме искаженной человеческой фигуры, называемой "сенсорным гомункулусом". Фигура имеет увеличенные руки и губы и уменьшенный торс, пропорционально насыщенности кожи кожными рецепторами в соответствующих зонах тела человека. Эта область мозга играет важную роль в создании образа тела человека.
Схожая область мозга, расположенная рядом (впереди от соматосенсорной коры) называется соматомоторной корой. Она управляет мышцами тела. Ей соответствует "моторный гомункулус", хотя точки в этой области мозга связаны с группами мышц, а не с отдельными мышцами. Соматомоторная кора и соматосенсорная кора тесно взаимодействуют, что необходимо для координации движений тела.
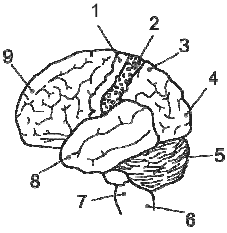
1 - соматомоторная кора; 2 - соматосенсорная кора; 3 - теменная доля; 4 - затылочная доля; 5 - мозжечок; 6 - спинной мозг; 7 - продолговатый мозг; 8 - височная доля; 9 - лобная доля
Рисунок С.1 - Доли головного мозга
С.2 Сенсоры прикосновения
C.2.1 Общие положения
Все осязательные контакты осуществляются через кожу. Поэтому физиология прикосновения является основой исследований осязания.
C.2.2 Механорецепторы
За восприятие механических прикосновений к поверхности "гладкой" кожи (кожи, не имеющей волосяных фолликулов) отвечают четыре основных типа механорецепторов.
a) Тельца Мейснера улавливают легчайшие касания на частотах ниже 50 Гц. Они разряжаются в начале стимуляции, и поэтому хорошо ощущают скорость касания. Эти рецепторы составляют 40% тактильных рецепторов в руке и залегают чуть глубже слоя эпидермиса. Они движутся вместе со складками кожи и поэтому чувствительны к движению по поверхности кожи. Их пространственное разрешение составляет от 3 до 5 мм.
b) Диски Меркеля чувствительны к изгибанию кожи и надавливанию на нее. Это медленно действующие рецепторы, реагирующие на раздражители с частотой до 10 Гц. Они составляют 25% рецепторов в руке. Их пространственное разрешение составляет около 0,5 мм.
c) Тельца Паччини чувствительны к быстрым, легким прикосновениям. Их частотный диапазон от 100 до 300 Гц, хотя наблюдались и реакции на раздражители до 1 кГц. Эти рецепторы представляют собой овальные структуры длиной около 1 мм, расположенные в глубоких слоях кожи. Они составляют 13% всех рецепторов в руке, и имеют пространственное разрешение около 20 мм.
d) Окончания Руффини чувствительны к статическому растяжению кожи на частотах до 10 Гц. Эти веретенообразные рецепторы способствуют кинестетическому чувству и управлению положением и движением пальца. Они составляют около 19% всех рецепторов в руке и имеют пространственное разрешение 10 мм.
В результате совместной деятельности всех четырех типов рецепторов возникает тактильное ощущение. Кроме того, действуют еще два типа рецепторов.
e) Волосяные фолликулы чувствительны к движению волосков на коже, вызванному движением воздуха или тесным контактом.
f) Свободные нервные окончания (в отличие от инкапсулированных окончаний четырех основных типов сенсоров кожи) чувствительны к боли. Разновидности свободных нервных окончаний также воспринимают давление на кожу, ее растяжение и температуру. Свободные нервные окончания также могут быть классифицированы на медленно адаптирующиеся, со средней скоростью адаптации и быстро адаптирующиеся.
C.2.3 Терморецепторы
В коже находятся два основных типа терморецепторов:
а) холодовые терморецепторы расположены в эпидермисе или чуть глубже. Кроме того, холодовые терморецепторы обнаружены в роговице, языке и мочевом пузыре. Плотность этих рецепторов в руках - от 1 до 5 рецепторов на квадратный сантиметр. Они вызывают чувство прохлады, холода и свежести;
б) тепловые терморецепторы расположены в дерме (глубоко в коже). Они имеют плотность всего 0,4 рецептора на квадратный сантиметр.
C.2.4 Рецепторы болевой чувствительности (ноцицепторы)
Интенсивные механические, термические или химические раздражители вызывают болевые ощущения. Сенсорами болевой чувствительности являются специализированные типы свободных нервных окончаний. Их пространственное разрешение составляет около 5 мм. Эти окончания связаны с мозгом нервными волокнами с большой скоростью проведения.
Сигналы от ноцицепторов обрабатываются в коре головного мозга, где боль воспринимается осознанно. Мозг может принять решение уменьшить болевые ощущения, отправив сигнал, стимулирующий выделение специфических гормонов.
Болевая чувствительность может значительно повыситься в результате воспаления в окружающих тканях. Такое состояние ощущения боли от обычных раздражителей ("гипералгезия") обычно уменьшается, когда воспаление проходит. Последующие травмы или воспаления могут привести к аллодинии, при которой легкое прикосновение вызывает очень острую боль.
C.2.5 Хеморецепторы
Хеморецепторы находятся в основном во внутренних органах, где они выполняют разные функции.
a) В стволе головного мозга и в аорте они контролируют уровень углекислого газа в крови. В ответ на повышение в крови уровня увеличивается частота дыхания и сердечных сокращений.
b) Располагаясь на языке, они образуют активный сенсор из пяти различных вкусовых рецепторов. Эти рецепторы реагируют на соленые, кислые, сладкие, горькие и острые вкусовые раздражители.
c) Располагаясь в носу, хеморецепторы обнаруживают определенные молекулы в воздухе путем образования химических связей. Они связаны с разными обонятельными сенсорными нейронами. В обонятельной луковице существует около 40 миллионов таких нейронов.
C.2.6 Электротактильная стимуляция
Специфических рецепторов для электротактильных взаимодействий не обнаружено, но полагают, что малые электрические токи стимулируют нейроны, которые передают информацию от механорецепторов в мозг.
Существуют некоторые исследования, в которых пытаются соотнести изображения или звук с массивом таких стимуляторов, чтобы позволить слепым и глухим людям воспринимать образ или звук посредством тактильного чувства.
На большинстве участков тела импульс около 1 мА в течение 0,1 мс с электрода площадью 24 мм является пороговым. Порог уменьшается с увеличением размера электрода.
Максимальный ток ограничен болезненными ощущениями, которые начинаются при превышении порога в 2-10 раз. Точное значение максимального тока зависит от локализации электрода, его контакта с кожей и чувствительности субъекта.
Тактильное устройство обеспечивает формирование рисунка с помощью массива электростимуляторов на основе граней изображения, снятого видеокамерой, закрепленной на лбу человека. Контакт стимулирующей части устройства должен быть расположен на языке, а не на кончиках пальцев, спине или животе, поскольку язык может воспринимать импульсы от 5 до 15 В, в то время как другие участки кожи - от 40 до 500 В. Нервы языка расположены ближе к поверхности, он не имеет слоя омертвевшей кожи; язык смачивается слюной, что улучшает электрический контакт. Более того, зона коры головного мозга, которая обрабатывает сигналы прикосновения от языка, обширнее, чем зоны, которые иннервируют другие части тела.
C.3 Кинестетическое чувство (сенсоры, рецепторы)
C.3.1 Общие положения
Кинестетическое чувство дает возможность человеку осознавать то, с какой скоростью движутся части его тела и в каком направлении. Оно также позволяет человеку различать, является ли движение произвольным или навязано извне.
C.3.2 Кинестетические рецепторы
За кинестетическое чувство отвечают четыре типа механорецепторов:
a) сухожильные органы Гольджи находятся в местах соединения мышечных волокон с сухожилиями. Они состоят из коллагеновых волокон, прикрепленных одним концом к мышце, а другим к сухожилию. Нервные волокна внутри органа улавливают величину растяжения и, следовательно, силу сокращения мышцы;
b) мышечные веретена расположены между отдельными мышечными волокнами по всей мышце. Они включают в себя ряд мышечных волокон, и чувствительные элементы, фиксирующие изменения длины мышцы. Информация о длине отдельных групп мышечных волокон используется для регулирования растяжения всей мышцы. Эта информация также используется как часть сенсорной системы для определения относительного положения конечностей;
c) тельца Паччини расположены возле связок в суставах тела. Также называемые окончаниями Гольджи. Эти рецепторы являются наиболее активными в крайних положениях суставов. Таким образом, они являются защитными сенсорами;
d) тельца Руффини (окончания Руффини) расположены возле суставов. Они активны как во время неподвижности, так и при движении, и могут способствовать определению углов суставов с точностью до 2°.
Кроме того, как полагают, свободные нервные окончания играют роль в кинестетическом восприятии, особенно при восприятии боли.
С.3.3 Дифференциальный порог
Углы расположения конечностей ощущаются с высокой точностью ближе к телу и с уменьшением точности по направлению к наружным (дистальным) отделам конечностей.
Дифференциальный порог для плеча составляет 0,8°; для локтевого и лучезапястного сустава - 2,0°; для пальцев - 2,5°. Дифференциальный порог для бедра - 0,2°, а для пальцев ног он составляет 6,0°.
Между дифференциальным порогом и обнаружением направления движения существует значимое различие. Тот факт, что движение произошло, будет, как правило, очевидным для субъекта еще до осознания направления движения.
С.3.4 Кинестетическое чувство
Кинестетическое чувство - это общее восприятие движения и расположения конечностей человека и других частей тела. Оно охватывает не только сигналы кинестетических рецепторов в мышцах и суставах, но также и образ тела, сформированный в мозге.
Изучение этого чувства можно разделить на следующие четыре категории:
a) углы суставов измеряются четырьмя типами сенсоров, перечисленных в разделе С.3.2. Они определяют положения рук и тела, преимущественно воспринимая мышечное напряжение;
b) направление конечности - ориентация конечности в целом по отношению к телу человека;
c) положение тела - ориентация всего тела относительно его окружения. Это чувство основано на зрительных сигналах об окружающем пространстве совместно с сигналами от вестибулярного аппарата (механизма баланса, который расположен во внутреннем ухе);
d) усилие и вращение тела - исходящая информация от мышц при взаимодействии с окружающей средой посредством физического контакта. Первичные ощущения возникают в кинестетических рецепторах и механорецепторах.
Эти категории представлены в порядке от местоположения конечности до взаимодействия всего тела с окружающей средой. Категории образованы на основе представления о теле и его расположении, которые формируются в различных областях мозга, в том числе в соматосенсорной коре и лобной доле. "Образ тела" или самоощущение человеком собственного тела, положения конечностей и внешнего вида может оказаться результатом работы мозга в целом.
Особое состояние положения тела - это равновесие, которое является элементом проприоцепции. Равновесие - это способность удерживать вертикальную проекцию центра тяжести в пределах площади опоры с минимальными изменениями позы. Равновесие формируется на основе совокупности сигналов от нескольких источников - вестибулярного аппарата, соматосенсорной системы ощущений мышц и суставов, а также двигательной (соматомоторной) системы, которая управляет действиями мышц.
С.4 Сенсомоторный контроль
Кинестетическое и осязательное чувства работают вместе с группами мышц для обеспечения активного осязательного исследования или манипуляций. В процессе исследования преобладает сенсорный канал, тогда как при манипуляциях с объектами преобладает моторный (двигательный) канал.
Координированное движение на основе чувства осязания и управления двигательной активностью представляет собой сложное действие, которое человек обычно принимает как должное. В редких случаях, когда кинестетическое чувство нарушено или атрофировано, ходьба и взаимодействие с объектами возможны только при участии зрения и с огромным трудом.
Упрощенная модель сенсомоторного управления показана на рисунке С.2. При правильном функционировании планирование произвольного движения начинается в лобной доле. Здесь в премоторной коре и вспомогательной моторной зоне анализируются поступающие сигналы из теменной доли и других областей мозга. Такие сигналы включают в себя чувство положения тела в пространстве и память предыдущих действий, скоординированных с участием зрительной коры. Затем первичная моторная кора определяет, какие мышцы должны сокращаться и насколько сильно.
Сигналы ощущений от мышц непрерывно указывают положения конечностей и всего тела. Они обрабатываются в первичной моторной коре, которая использует обратную связь для тонкой подстройки движений. В то же время мозжечок, нижняя часть мозга, регулирует ритм и корректирует равновесие. Он может действовать в сочетании с музыкой, обрабатываемой в височной доле, при участии базальных ганглиев (подкорковых узлов) в задании темпа и ритма движений.
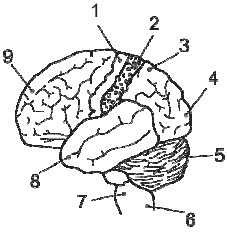
1 - соматомоторная кора; 2 - соматосенсорная кора; 3 - теменная доля; 4 - затылочная доля; 5 - мозжечок; 6 - височная доля; 7 - фронтальная доля; 8 - сенсор прикосновения; 9 - мышцы
Рисунок С.2 - Функционирование мозга во время танцевальных движений
На рисунке С.2 представлена простая модель мозга, однако его деятельность намного сложнее, чем в рассмотренной модели. Скорее всего, свойства, определяющие личность, распределены по всему мозгу.
Можно выделить следующие функции основных отделов мозга:
a) лобные доли:
- планирование, самоконтроль и процессы высокого уровня;
b) задняя лобная доля:
- моторная (двигательная) активность, навыки ориентации в пространстве;
c) височная доля:
- слух и память;
d) затылочная доля:
- зрение;
e) мозжечок:
- эмоции, координация движений.
Библиография
[1] | ISO 1503 | Spatial orientation and direction of movement - Ergonomic requirements |
[2] | ISO 9241-5 | Ergonomic requirements for office work with visual display terminals (VDTs) - Part 5: Workstation layout and postural requirements |
[3] | ISO 9241-12 | Ergonomic requirements for office work with visual display terminals (VDTs) - Part 12: Presentation of information |
[4] | ISO 9241-14 | Ergonomic requirements for office work with visual display terminals (VDTs) - Part 14: Menu dialogues |
[5] | ISO 9241-15 | Ergonomic requirements for office work with visual display terminals (VDTs) - Part 15: Command dialogues |
[6] | ISO 9241-16 | Ergonomic requirements for office work with visual display terminals (VDTs) - Part 16: Direct manipulation dialogues |
[7] | ISO 9241-17 | Ergonomic requirements for office work with visual display terminals (VDTs) - Part 17: Form filling dialogues |
[8] | ISO 9241-110 | Ergonomics of human-system interaction - Part 110: Dialogue principles |
[9] | ISO 9241-210 | Ergonomics of human-system interaction - Part 210: Human-centred design for interactive systems |
[10] | ISO 9241-400 | Ergonomics of human-system interaction - Part 400: Principles and requirements for physical input devices |
[11] | ISO 9241-410 | Ergonomics of human-system interaction - Part 410: Design criteria for physical input devices |
[12] | ISO 9241-920:2009 | Ergonomics of human-system interaction - Part 920: Guidance on tactile and haptic interactions |
[13] | ISO 11064-4 | Ergonomic design of control centres - Part 4: Layout and dimensions of workstations |
[14] | EN 894-4 | Safety of machinery - Ergonomic requirements for the design of displays and control actuators - Part 4: Location and arrangement of displays and control actuators |
[15] | AKAMATSU, M., MACKENZIE, I.S. and HASBROUQ, T. A comparison of tactile, auditory, and visual feedback in a pointing task using a mouse-type device. Ergonomics, 38, pp.816-827 | |
[16] | AMIRABDOLLAHIAN, F., TOPPING, T., DRIESSEN, B. and HARWIN, W. (2003). Upper Limb Robot Mediated Stroke Therapy - GENTLE/s Approach. Autonomous Robots, 15(1), pp.35-51 | |
[17] | BACH-Y-RITA, P. (1972). Brain Mechanisms in Sensory Substitution. New York: Academic Press | |
[18] | BACH-Y-RITA, P., KACZMAREK, K.A. and TYLER, M.E. (2003). A tongue-based tactile display for portrayal of environmental characteristics. In J.Hettinger and M.W.Haas (eds.), Virtual and adaptive environments: Applications, implications, and human performance. Mahwah, NJ: Erlbaum | |
[19] | BAILLIE, S., CROSSAN, A., BREWSTER, S.A., MELLOR, D. and REID, S. (2005). Validation of a Bovine Rectal Palpation Simulator for Training Veterinary Students. Studies in Health Technology and Informatics, pp.33-36, IOS Press | |
[20] | BASDOGAN, C., DE, S., KIM, J., MUNIYANDI, M., KIM, H. and SRINIVASAN, M.A. (2004). Haptics in Minimally Invasive Surgery Simulation and Training. IEEE Computer Graphics and Applications, 24(2), pp.56-64 | |
[21] | BREWSTER, S.A. and KING, A. (2005). An Investigation into the Use of Tactons to Present Progress Information. Proceedings of Interact 2005 (Rome, Italy), pp.6-17 | |
[22] | BURDEA, G.C. (2000). Haptic issues in virtual environments. Proceedings of computer graphics international, pp.295-302 | |
[23] | BURDEA, G. (1996). Force and Touch Feedback for Virtual Reality. New York: John Wiley & Sons | |
[24] | CHOI, S. and TAN, H.Z. (2004). Toward realistic haptic rendering of surface textures, IEEE Computer Graphics and Applications, 24(2), pp.40-47 | |
[25] | COCKBURN, A. and BREWSTER, S.A. Multimodal feedback for the acquisition of small targets. Ergonomics, 48 (9), pp.1129-1150 | |
[26] | COLGATE, J.E. and SCHENKEL, G.G. (1997). Passivity of a class of sampled-data systems: Application to haptic interfaces. J. of Robotic Systems, Vol.14, No.1, pp.37-47 | |
[27] | CRAIG, J. and JOHNSON, K.O. (2000). The two-point threshold: not a measure of tactile spatial resolution. Current Directions in Psychological Science, 9, pp.29-32 | |
[28] | CROSSAN, A. and BREWSTER, S.A., REID, S. and MELLOR, D. (2002). Multi-Session VR Medical Training - The HOPS Simulator. Proceedings of BCS HCI 2002 (London, UK), Springer, pp.213-226 | |
[29] | DIOLAITI, N., NIEMEYER, G., BARBAGLI, F. and SALISBURY, J.K. (2005). Stability of haptic rendering: discretization, quantization, time-delay and coulomb effects. IEEE Trans. Robotics, Vol.22, No.2, pp.256-268 | |
[30] | DONALD, B.R. and HENLE, F. (2002). Using haptic vector fields for animation motion control. Proc.2000 IEEE Int. Conf. on Robotics & Automation, April 2000, San Francisco, CA, pp.3435-3442 | |
[31] | MIRANDA, E.R. and WANDERLEY, M.M. (2006). New Digital Musical Instruments: Control and Interaction beyond the Keyboard. Middleton, WI: A-R Editions. ISBN 0-89579-585-X | |
[32] | FRISOLI, A., BERGAMASCO, M., WU, S.L. and RUFFALDI, E. (2005). Evaluation of multipoint contact interfaces in haptic perception of shapes. In F.Barbagli, D.Prattichizzo and K.Salisbury (eds.). Multi-point Interaction with Real and Virtual Objects, Springer Tracts in Advanced Robotics, (Vol.18, pp.177-188). Berlin/Heidelberg: Springer | |
[33] | GALLACE, A., TAN, H.Z. and SPENCE, C. (2005).Tactile change detection. In Haptic Interfaces for Virtual Environment and Teleoperator Systems. WHC 2005, First Joint Eurohaptics Conference and Symposium, pp.12-16 | |
[34] | GARROWAY, D. and HAYWARD, V. (2004). A Haptic Interface for Editing Space Trajectories. Proc. ACM SIGGRAPH & EuroGraphics Symposium on Computer Animation. August 27-29, Grenoble, France | |
[35] | GEMPERLE, F., OTA, N. and SIEWIOREK, D. (2001). Design of a Wearable Tactile Display. Proceedings of the Fifth International Symposium on Wearable Computers, pp.5-12 | |
[36] | GOSLINE, A.H.C. and HAYWARD, V. (2007). Time-Domain Passivity Control of Haptic Interfaces with Tunable Damping Hardware. World Haptics Conference, Second Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems (WHC'07), pp.164-179 | |
[37] | HALE, K.S. and STANNEY, K.M. (2004). Deriving haptic design guidelines from human physiological, psychophysical and neurological foundations. IEEE Computer Graphics and Applications, 24(2), pp.33-39 | |
[38] | HAYWARD, V., ASTLEY, O.R., CRUZ-HERNANDEZ, M., GRANT, D. and ROBLES-DE-LA-TORRE, G. (2004). Haptic Interfaces and Devices. Sensor Review, 24(1), pp.16-29 | |
[39] | HAYWARD, V. and ASTLEY, O.R. (1996). Performance Measures for Haptic Interfaces. In G.Giralt and G.Hirzinger (eds.), Robotics Research: The 7th International Symposium. Springer Verlag, pp.195-207 | |
[40] | HAYWARD, V. and MACLEAN, K.E. (2007). Do It Yourself Haptics, Part-I. IEEE Robotics and Automation Magazine, 14(4), pp.88-104 | |
[41] | HO, C., SPENCE, C. and TAN, H.Z. (2005). Warning Signals Go Multisensory. Proceedings of HCI International 2005, Lawrence Erlbaum Associates, pp.1-10 | |
[42] | HOGGAN, E, BREWSTER, S.A. and JOHNSTON, J. (2008). Investigating the Effectiveness of Tactile Feedback for Mobile Touchscreens. In Proceedings of ACM CHI 2008 (Florence, Italy). ACM Press Addison Wesley | |
[43] | HOLLINS, M., FALDOWSKI, R., RAO, S. and YOUNG, F. (1993). Perceptual dimensions of tactile surface texture: A multidimensional scaling analysis. Perception and Psychophysics, 54, pp.697-705 | |
[44] | HOLLIS, R. (2004). Haptics. In W.Bainbridge, ed., Berkshire Encyclopaedia of Human-Computer Interaction, Berkshire Publishing Group, pp.311-316 | |
[45] | JANSSON, G., BILLBERGER, K., PETRIE, H., COLWELL, C., KORNBROT, D., | |
[46] | JANSSON, G. and | |
[47] | JANSSON, G., JUSLIN, P. and POOM, L. (2006). Liquid-specific properties can be utilized for haptic perception of amount of liquid in a vessel put in motion. Perception, 35, pp.1421-1432 | |
[48] | JANSSON, G. and MONACI, L. (2006). Identification of real objects under conditions similar to those in haptic displays: Providing spatially distributed information at the contact areas is more important than increasing the number of areas. International Journal of Virtual Reality, 9, pp.243-249 | |
[49] | JANSSON, G. and | |
[50] | JOHNSON, K.O. and PHILLIPS, J.R. (1981). Tactile spatial resolution. I.Two-point discrimination, gap detection, grating resolution, and letter recognition. Journal of Neurophysiology, 46(6), pp.1177-1192 | |
[51] | JOHNSON, K. (2002). Neural basis of haptic perception, In H.Pashler & S.Yantis, Stevens' Handbook of Experimental Psychology, Vol.1. Sensation and Perception (3rd ed.). New York: Wiley, pp.537-583 | |
[52] | JUNGMANN, M. (2004). Entwicklung elektrostatischer | |
[53] | KACZMAREK, K., WEBSTER, J., BACH-Y-RITA, P. and TOMPKINS, W. Electrotactile and vibrotactile displays for sensory substitution systems. IEEE Transactions on Biomedical Engineering, 38(1), pp.1-16 | |
[54] | KACZMAREK, K.A., TYLER, M.E. and BACH-Y-RITA, P. (1997). Pattern identification on a fingertipscanned electrotactile display. In Engineering in Medicine and Biology society, 1997. Proceedings of the 19th Annual International Conference of the IEEE 4. Vol.4, pp.1694-1696 | |
[55] | KATZ, D. (1989). The world of touch. (Original work published 1925, Translated by L.E.Kreuger). Hillsdale, NJ: Erlbaum | |
[56] | KLATZKY, R.L. and LEDERMAN, S.J. (1995). Identifying objects from a haptic glance. Perception and Psychophysics, 57, pp.1111-1123 | |
[57] | KLATZKY, R.L. and LEDERMAN, S.J. (2006). The perceived roughness of resistive virtual textures: I. Rendering by a force feedback mouse. ACM Transactions on Applied Perception, 3, pp.1-14 | |
[58] | KLATZKY, R.L. and LEDERMAN, S.J. (2002). Touch. In A.F.Healy and R.W.Proctor (eds.), Experimental Psychology (pp.147-176), Vol.4 in I.B.Wiener (Editor in Chief), Handbook of Psychology. New York: Wiley | |
[59] | KLATZKY, R.L., LEDERMAN, S.J., HAMILTON, C., GRINDLEY, M. and SWENDSEN, R.H. (2003). Feeling textures through a probe: Effects of probe and surface geometry and exploratory factors. Perception and Psychophysics, 65, pp.613-631 | |
[60] | KLATZKY, R.L., LEDERMAN, S.J. and METZGER, V.A. (1985). Identifying objects bу touch: An "expert system". Perception and Psychophysics, 37, pp.299-302 | |
[61] | KYUNG, K.U, AHN, M., KWON, D.S. and SRINIVASAN, M.A. (2005). Perceptual and Biomechanical Frequency Response of Human Skin: Implication for Design of Tactile Displays. Proc. of World Haptics: 1st Joint Eurohaptics Conf. and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Pisa, Italy, pp.96-101 | |
[62] | KYUNG, K.U, LEE, J.Y and PARK, J. (2008). Haptic Stylus and Empirical Studies on Braille, Button and Texture Display, Journal of Biomedicine and Biotechnology, ID369651 | |
[63] | KYUNG, K.U, KIM, S.C. and KWON, D.S. (2007). Texture Display Mouse: Vibrotactile Pattern and Roughness Display, IEEE/ASME Transactions on Mechatronics, 12(3), pp.356-360 | |
[64] | LEDERMAN, S.J. and KLATZKY, R.L. (1987). Hand movements: A window into haptic object recognition. Cognitive Psychology, 19, pp.342-368 | |
[65] | LEDERMAN, S.J. and KLATZKY, R.L. (1999). Sensing and displaying spatially distributed fingertip forces in haptic interfaces for teleoperators and virtual environment systems. Presence, 8, pp.86-103 | |
[66] | LEDERMAN, S.J. and KLATZKY, R.L. (2004). Haptic identification of common objects: Effects of constraining the manual exploration process. Perception and Psychophysics, Vol.66, pp.618-628 | |
[67] | LEDERMAN, S.J. and KLATZKY, R.L. (2004). Multisensory texture perception. In G.A.Calvert, C.Spence and B.E.Stein (eds.), Handbook of multisensory processes. Cambridge, MA: MIT Press, pp.107-122 | |
[68] | LEVESQUE, V., PASQUERO, J. and HAYWARD, V. (2007). Braille Display by Lateral Skin Deformation with the STReSS2 Tactile Transducer. In World Haptics 2007, Second Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, pp.115-120 | |
[69] | LIN, M., BAXTER, W., SCHEIB, V. and WENDT, J. (2004). Physically based virtual painting. Commun. ACM, 47(8), pp.40-47 | |
[70] | MACLEAN, J.K.E. and HAYWARD, V. (2008). Do It Yourself Haptics, Part II. IEEE Robotics and Automation Magazine, 15(1), pp.104-119 | |
[71] | MAGNENAT-THALMAN, N., VOLINO, P., BONANNI, U., SUMMERS, I.R., BERGAMASCO, M., SALSEDO, F. and WOLTER, F.-E. (2007). From physics-based simulation to the touch of textiles: The HAPTEX project. International Journal of Virtual Reality, 6, pp.35-44 | |
[72] | MCDONNELL, K.T., QIN, H. and WLODARCZYK, R.A. (2001). Virtual clay: a real-time sculpting system with haptic toolkits. Proceedings of the 2001 Symposium on interactive 3D Graphics I3D '01. ACM, New York, NY, pp.179-190 | |
[73] | MILLER, T. and ZELEZNIK, R., (1998). An insidious haptic invasion: adding force feedback to the X desktop. Proceedings of the 11th annual ACM symposium on User Interface Software and Technology, (San Francisco, CA), ACM Press, pp.59-64 | |
[74] | MUNIR, S., TOGNETTI, L. and BOOK, W.J. (1999). Experimental evaluation of a new braking system for use in passive haptic displays. Proc.1999 American Control Conference, Vol.6, 2-4 June 1999, San Diego, CA, pp.445-4460 | |
[75] | OAKELY, I., MCGEE, M.R., BREWSTER, S.A. and GRAY, P.D. (2000). Putting the feel in "look and feel". Proceedings of the ACM CHI 2000 Human Factors in Computing Systems Conference, pp.415-422 | |
[76] | OAKLEY, I., BREWSTER, S.A. and GRAY, P.D. (2001). Solving multi-target haptic problems in menu interaction. In Extended Abstracts of ACM CHI 2001 (Seattle, WA), ACM Press, pp.357-358 | |
[77] | PANG, X.D., TAN, H.Z. and DURLACH, N.I. (1991). Manual discrimination of force using active finger motion. Perception and Psychophysics, 49, pp.531-540 | |
[78] | ROSENBERG, L.B. (1995). How to assess the quality of forcer-feedback systems. J. of Medicine and Virtual Reality, Vol.1, Spring 1995, pp.12-15 | |
[79] | ROSENBERG, L.B. and ADELSTEIN, B.D. (1993). Perceptual decomposition of virtual haptic surfaces. Proc. IEEE 1993 Symp. on Research Frontiers in Virtual Reality, San Jose, CA, pp.46-53 | |
[80] | ROVERS, A.F. and VAN ESSEN, H.A. (2004). HIM: A Framework for Haptic Instant Messaging. Extended Abstracts of CHI 2004, ACM Press, pp.1313-1316 | |
[81] | RYU, J.H, KWON, D.S and HANNAFORD, B. (2004). Stable Teleoperation with Time Domain Passivity Control. IEEE Transactions on Robotics and Automation, 20(2), pp.365-373 | |
[82] | SADDIK, A.E. (2007). The potential of haptics technologies. IEEE Instrumentation and Measurement Magazine, 10(1), pp.10-17 | |
[83] | SALISBURY, K., CONTI, F. and BARBAGLI, F. (2004). Haptic rendering: Introductory concepts. IEEE Computer Graphics and Applications, 24(2), pp.24-32 | |
[84] | SRINIVASAN, M.A. and BASDOGAN, C. (1997). Haptics in virtual environments: Taxonomy, research status, and challenges. Computers and Graphics, 21(4), pp.393-404 | |
[85] | STEVENS, J.C. and PATTERSON, M.Q. (1995). Dimensions of spatial acuity in the touch sense: Changes over the life span. Somatosensory and Motor Research, 12, pp.29-47 | |
[86] | TAN, H.Z., BARBAGLI, F., SALISBURY, K., HO, C. and SPENCE, C. (2006). Force-direction discrimination is not influenced by reference force direction. Haptics-e, 4(1) | |
[87] | TURVEY, M.T. and CARELLO, C. (1995). Dynamic touch. In W.Epstein and S. Rogers (eds.), Perception of space and motion. San Diego, CA: Academic Press, pp.401-490 | |
[88] | ULLMER, B. and ISHII, H. (2000). Emerging frameworks for tangible user interfaces, IBM Systems Journal, 39, Numbers 3 and 4, 2000, MIT Media Laboratory | |
[89] | VAN ERP, J.B.F. (2005). Presenting Directions with a Vibro-Tactile Torso Display. Ergonomics, 48, pp.302-313 | |
[90] | VAN ERP, J.B.F., VAN VEEN, H.A.H.C., JANSEN, C. and DOBBINS, T. (2005). Waypoint Navigation with a Vibrotactile Waist Belt. Transactions on Applied Perception, 2(2), pp.106-117 | |
[91] | VAN ERP, J.B.F. and VAN VEEN, H.A.H.C. (2004). Vibrotactile in-vehicle navigation system. Transportation Research Part F: Human Factors, 7, pp.247-256 | |
[92] | VAN ERP, J.B.F. (2005). Vibrotactile spatial acuity on the torso: effects of location and timing parameters. In Haptic Interfaces for Virtual Environment and Teleoperator Systems. WHC 2005, First Joint Eurohaptics Conference and Symposium, pp.80-85 | |
[93] |
| |
[94] | WALL, S.A. and BREWSTER, S. (2006). Feeling what you hear: Tactile feedback for navigation of audio graphs. Proceedings of ACM CHI 2006 (Montreal, Canada). ACM Press Addison-Wesley, pp.1123-1132 | |
[95] | WINFIELD, L., GLASSMIRE, J., COLGATE, J.E. and PESHKIN, M. (2007). T-PaD: Tactile Pattern Display through Variable Friction Reduction. In World Haptics 2007, Second Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, pp.421-426 | |
[96] | YU, W. and BREWSTER, S.A. Evaluation of multimodal graphs for blind people. Universal Access in the Information Society, 3(2) | |
УДК 331.101.1:006.354 | ОКС | 13.180 |
35.180 | ||
Ключевые слова: эргономика, осязание, прикосновение, тактильный, кинестетика, восприятие, ощущение, рецепторы, тактильные/осязательные устройства, тактильные/осязательные взаимодействия, проектирование тактильных/осязательных взаимодействий, обратная связь по усилию | ||
Электронный текст документа
и сверен по:
, 2016
{kind=link}