ГОСТ Р ИСО 26022-2017
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ЭРГОНОМИКА ТРАНСПОРТНЫХ СРЕДСТВ
Эргономические аспекты информационно-управляющей системы транспортного средства. Моделируемые испытания на смену полосы движения для оценки влияния выполнения второстепенной задачи на управление транспортным средством
Ergonomics of vehicles. Ergonomic aspects of transport information and control system. Simulated lane change tests to assess the effect of secondary task on driving
ОКС 13.180
Дата введения 2018-12-01
Предисловие
1 ПОДГОТОВЛЕН Открытым акционерным обществом "Научно-исследовательский центр контроля и диагностики технических систем" (АО "НИЦ КД") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 201 "Эргономика, психология труда и инженерная психология"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 17 октября 2017 г. N 1440-ст
4 Настоящий стандарт идентичен международному стандарту ИСО 26022:2010* "Транспорт дорожный. Эргономические аспекты информационно-управляющей системы транспортного средства. Моделируемое испытание на смену полосы движения для оценки требований второстепенной задачи в транспортном средстве" (ISO 26022:2010 "Road vehicles - Ergonomic aspects of transport information and control systems - Simulated lane change test to assess in-vehicle secondary task demand", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Международный стандарт разработан Техническим комитетом ISO/ТС 22.
Наименование настоящего стандарта изменено относительно наименования указанного международного документа для приведения в соответствие с ГОСТ Р 1.5-2012 (подраздел 3.5)
5 ВВЕДЕН ВПЕРВЫЕ
6 ПЕРЕИЗДАНИЕ. Август 2019 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
В настоящее время наблюдается значительный прогресс во внедрении широкого диапазона информационных, коммуникационных, развлекательных и управляющих систем транспортного средства. Навигационные устройства, системы информирования о неполадках и системы беспроводной связи, включая электронную почту и доступ в Интернет, стали доступны водителю. Поскольку многие из этих устройств требуют внимания водителя, необходимо учитывать, что, с одной стороны, эти системы предоставляют информацию и помощь, но, с другой стороны, могут отвлекать водителя.
Испытание на смену полосы движения (LCT), описанное в настоящем стандарте, представляет собой метод, предназначенный для оценки требований второстепенной задачи при использовании устройств транспортного средства в условиях эксперимента. Этот метод является простым и недорогим, поэтому может быть использован изготовителями транспортных средств, изготовителями устройств для транспортных средств и другими организациями.
Принципы оценки требуемого уровня внимания и поведения водителя, лежащие в основе LCT, применимы для управления типовыми легковыми автомобилями, поскольку модель динамики транспортного средства, высота глаз водителя, размеры дорожных полос и геометрия смены полосы движения приведены только для данного вида транспортных средств.
При проведении испытаний, в соответствии с процедурой, установленной в настоящем стандарте, используют программное обеспечение для установки задач LCT на компьютере и вычисления показателей результативности выполнения основной задачи. Соответствующее программное обеспечение доступно в Центральном секретариате ИСО.
1 Область применения
В настоящем стандарте приведен динамический метод, позволяющий при выполнении двух задач измерять снижение результативности выполнения основной задачи управления транспортным средством во время выполнения второстепенной задачи. Результатом является оценка требований второстепенной задачи.
Испытания проводят в лабораторных условиях. Настоящий стандарт устанавливает метод проведения испытаний, минимальные требования к оборудованию для его применения и процедуры сбора данных и анализа результатов.
Метод применим ко всем видам взаимодействий с информационной, коммуникационной, развлекательной и управляющей системой во время движения транспортного средства. Он охватывает мануальные (физические), визуальные, тактильные и звуковые аспекты и их комбинации. Второстепенные задачи, требующие изменения скорости, не могут быть исследованы на основе данного метода. Данный метод может быть использован как изготовителями оборудования (OEM), так и участниками процесса послепродажного обслуживания транспортных средств. Метод применим как к портативным, так и к интегрированным системам управления транспортным средством. Рассмотренные принципы поведения водителя, процедуры выполнения задач и задачи управления транспортным средством соответствуют только управлению легковыми автомобилями.
2 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
2.1 адаптированная модель (adaptive model): Эталонная траектория, адаптированная для каждого участника.
2.2 базовые условия (baseline): Условия испытаний, предназначенные для выполнения только основной задачи.
2.3 базовая модель (basic model): Условно заданная траектория, одинаковая для всех участников.
2.4 задача калибровки (calibration task): Вид эталонной задачи, используемый для сравнения различных испытаний или результатов испытаний, проведенных в разных местах или в одном месте в течение определенного времени.
2.5 курс (course): Путь, вдоль которого перемещается имитируемое транспортное средство.
2.6 сдвоенная задача (dual task): Две выполняемые конкурирующие задачи, основная и второстепенная.
2.7 условия (environment): Физическая среда, в которой происходит сбор данных.
2.8 цель (goal): Конечное состояние системы, которого пытается добиться водитель, являющееся значимым при использовании водителем системы транспортного средства.
Пример - Получение рекомендаций по выбору маршрута до определенного пункта назначения, увеличенное отображение карты на дисплее или отмена навигации по маршруту.
2.9 интегрированная система (integrated system): Два или более устройств транспортного средства, входы и выходы которых объединены или согласованы, предоставляющих водителю транспортного средства информацию или принимающих от него данные или команды.
Пример 1 - Системы развлечений и навигации по маршруту транспортного средства, использующие один и тот же визуальный, мануальный и звуковой интерфейс.
Пример 2 - Система развлечений в транспортном средстве, звуковой вывод которой прекращается, когда поступает или совершается вызов по мобильному телефону.
2.10 смена полосы движения (lane change): Перемещение транспортного средства из одной полосы движения в другую, включающее пересечение одной или двух полос движения.
2.11 задача смены полосы движения (lane change task): Серия установленных маневров перестроения, которые являются главной составляющей основной задачи в испытаниях на смену полосы движения.
2.12 выброс (outlier): Наблюдение, лежащее за пределами области изменений данных.
2.13 изготовитель (manufacturer): Лицо или организация, ответственные за проектирование, разработку, производство, внедрение и/или поставку оборудования для транспортного средства.
2.14 мера отклонения маршрута (движения) (path deviation measure, mdev): Разность между эталонной и фактической траекториями движения.
2.15 портативная система, мобильное устройство (portable system, nomadic device): Устройство, предоставляющее водителю транспортного средства информацию или принимающее от него данные и команды, которое может быть использовано в транспортном средстве без монтажа или может быть быстро и легко установлено и удалено из транспортного средства.
2.16 основная задача (primary task): Действия по управлению транспортным средством, включая следование по маршруту и маневрирование, которые участник выполняет в процессе испытаний (моделирования управления транспортным средством).
2.17 эталонная задача (reference task): Стандартизированная второстепенная задача, которая может быть использована для сопоставления различных уровней снижения результативности выполнения основной задачи.
2.18 (испытательный) заезд (run): Эксперимент по управлению транспортным средством, используемый для сбора данных LCT, как правило, состоящий из 18 перестроений, выполняемых в течение 3 мин в условиях выполнения одной или двух задач.
2.19 второстепенная задача (secondary task): Взаимодействие с информационной, коммуникационной, развлекательной или управляющей системой транспортного средства, выполняемое одновременно с основной задачей.
2.20 требования второстепенной задачи (secondary task demand): Набор визуальных, звуковых, когнитивных и моторных ресурсов, необходимых для выполнения второстепенной задачи.
2.21 единственная задача (single task): Одна задача (основная или второстепенная), не требующая выполнения дополнительных действий (в отличие от сдвоенной задачи).
2.22 задача (task): Процесс достижения установленной и измеримой цели с использованием предписанного метода.
Примечание - Задачи, которые важны в условиях использования водителем устройств транспортного средства, определяют пользователи настоящего стандарта.
Пример 1 - Получение маршрута путем введения адреса, используя метод прокрутки списка, и запуска навигации по маршруту (визуально-мануальная задача).
Пример 2 - Определение места поворота на основе указаний навигационного экрана (визуальная задача).
2.23 трек (track): Трехполосная, прямолинейная, моделируемая дорога.
2.24 испытания (trial): Исследования с участием одного участника, выполняющего одну второстепенную задачу один раз.
3 Испытания на смену полосы движения
3.1 Принцип и краткий обзор
Испытания на смену полосы движения (LCT) являются простым лабораторным динамическим методом выполнения двух задач, который позволяет количественно определить снижение результативности выполнения основной задачи управления транспортным средством во время выполнения второстепенной задачи. Основной задачей LCT является моделируемая задача управления транспортным средством, аналогичная по визуальным, когнитивным и моторным требованиям реальному управлению транспортным средством.
В процессе испытаний участник должен выполнить основную задачу управления транспортным средством при постоянной, ограниченной системой, скорости 60 км/ч на моделируемой прямолинейной трехполосной дороге с осуществлением серии перестроений в соответствии с указателями, отображаемыми на экране. Моделируемое управление транспортным средством осуществляется с помощью рулевого колеса. Участники проходят инструктаж относительно смены полосы движения в соответствии с указателями, которые появляются приблизительно через равные интервалы по обе стороны дороги. Инструктаж участников проводят в соответствии с предписанной инструкцией, приведенной в настоящем стандарте (см. приложение A). Этот метод может быть реализован в лаборатории с использованием тренажера, макета или в реальных условиях.
В соответствии с настоящим стандартом при определении второстепенной задачи не существует никаких ограничений при условии, что она совместима с процедурой смены полосы движения.
Пример - Второстепенные задачи, требующие изменения скорости, не могут быть использованы при испытаниях.
3.1.1 Применение испытаний на смену полосы движения
Обычно на испытаниях смены полосы движения для оценки результативности выполнения основной задачи при одновременном выполнении второстепенной задачи используют эталонную задачу (см. приложение B). Эталонная задача представляет собой стандартизированную второстепенную задачу, которая может быть использована для сопоставления различных уровней снижения результативности. Такая стандартизированная эталонная задача также может быть использована для сравнения различных участков испытаний или для проверки согласованности при повторных испытаниях.
Испытания на смену полосы движения также могут быть использованы при разработке продукции для сопоставления альтернативных вариантов или решений взаимодействия "человек - машина" вместо сопоставления каждого из этих решений с результатами эталонной задачи (см. приложение C).
3.2 Участники
Участниками должны быть водители, имеющие соответствующее водительское удостоверение и обладающие необходимыми знаниями об исследуемой второстепенной задаче. Также должны быть зафиксированы и другие соответствующие характеристики участников (пол, возраст, стаж управления транспортным средством, предыдущий опыт участия в испытаниях на смену полосы движения). В соответствии с планом эксперимента не менее 16 участников должны принимать участие в испытаниях по оценке одной второстепенной задачи или сравнению двух или более второстепенных задач.
3.3 Оборудование
3.3.1 Устройство визуального отображения движения транспортного средства
Для визуального отображения движения транспортного средства в процессе испытаний используют монитор или проектор с частотой обновления не менее 50 Гц. Требуется минимальное разрешение 1024768 пикселей с глубиной цвета 24 бита (также называемого "истинный цвет"). Размер дисплея должен соответствовать требованиям 3.4.3.
3.3.2 Условия испытаний
Уровень освещенности при проведении испытаний должен соответствовать требованиям второстепенной задачи. Имитация звука двигателя является необязательной, но в случае ее использования уровень звука двигателя должен быть низким.
Во время проведения испытаний участники должны удобно сидеть прямо перед монитором, на котором визуально отображается выполнение основной задачи. Сиденье не должно вращаться или качаться. Ремень безопасности используют только в случае, если предполагается, что его использование может повлиять на результаты испытаний (например, если он ограничивает положения тела и досягаемость).
3.3.3 Характеристики рулевого колеса и его моделирование
Для управления моделируемым транспортным средством может быть использовано компьютерное рулевое колесо. Во время проведения испытаний с использованием макета или реального транспортного средства поворот рулевого колеса должен сопровождаться сигналами поворота и соответствовать повороту рулевого колеса, отображаемого на дисплее. Зависимость усилия на рулевом колесе от угла поворота должна быть приблизительно линейной, при этом касательное усилие, прилагаемое к ободу рулевого колеса для его поворота, должно быть не более 20 Н. Начальное усилие (дополнительный параметр) должно быть не более 12 Н. Адаптация LCT к использованию реального транспортного средства рассмотрена в приложении D.
Общая задержка от начала вращения рулевого колеса до реакции дисплея должна составлять менее 120 мс (за исключением моделируемой задержки).
Датчик положения рулевого колеса должен иметь разрешение менее 1,5°.
При повороте рулевого колеса на 90° относительно положения при прямолинейном движении транспортное средство должно выполнять поворот на 360° в течение 13-17 с с постоянной скоростью 60 км/ч, что соответствует движению по окружности с диаметром радиуса 70-90 м.
3.3.4 Динамика транспортного средства
Имитируемое транспортное средство должно быть запрограммировано в соответствии с характеристиками типового легкового автомобиля с точки зрения его размера и инерционных свойств. Интенсивность отклонения от курса при управлении угловыми характеристиками должна быть представлена запаздыванием первого порядка с эквивалентным временем, приблизительно равным 0,15 с (±0,03 с), включая реакцию математической модели транспортного средства и другие моделируемые транспортные задержки (см. 3.3.3).
3.3.5 Записи результатов измерений
Все параметры транспортного средства (то есть положение на треке, угол поворота управляемых колес, курсовой угол, интенсивность отклонения от курса и т.д.) фиксируют с периодичностью не менее 10 Гц. Дополнительные параметры и информация, такие как отметка времени для каждого участника, номер трека и обозначения задач (обычно их задает экспериментатор), также должны быть зафиксированы. Моделирование испытаний на смену полосы движения должно иметь минимальную интенсивность обновления 100 Гц. Кроме того, выполнение второстепенной задачи также должно быть зафиксировано (см. 3.7.3). Эти данные необходимы для обеспечения соблюдения участниками инструкций (см. приложение А).
3.4 Разработка сценария
3.4.1 Моделирование дороги и прилегающей территории
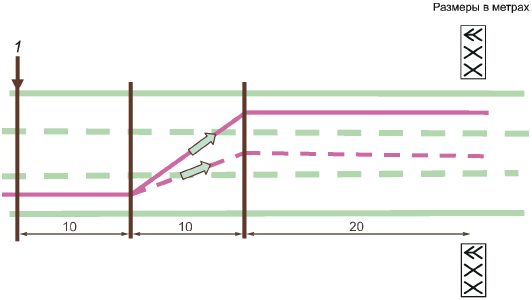
Моделируемая дорога (см. рисунок 1) представляет собой прямолинейный, трехполосный трек. Серии изменений полосы движения определены дорожными указателями, расположенными приблизительно через равные интервалы пути. Дорога пролегает по плоскому зеленому полю. На рисунке 2 показаны размеры дорожных полос и дорожной разметки. Дорожное покрытие серого цвета (как обычная асфальтированная дорога). Дорожная разметка имеет белый цвет.
Моделируемый маршрут должен быть отображен так, как его можно наблюдать из точки, расположенной на высоте (120±10) см над поверхностью дороги, что соответствует условиям управления типовым легковым автомобилем.
Примечание 1 - Геометрия дороги и смены полос движения, а также динамика транспортного средства не соответствуют требованиям к управлению грузовым автомобилем или другим грузовым транспортным средством.
Минимальная длина трека должна составлять 3000 м, что соответствует 3 мин управления транспортным средством со скоростью 60 км/ч. Указанная длина является достаточной для сбора данных испытаний в течение 2 мин.
Примечание 2 - В соответствии с указателями, приведенными на рисунке 1, участник должен выполнить перестроение из текущей (средней полосы) в правую полосу.
|
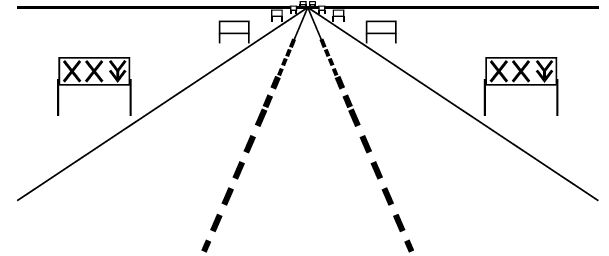
Рисунок 1 - Моделируемая дорога
|
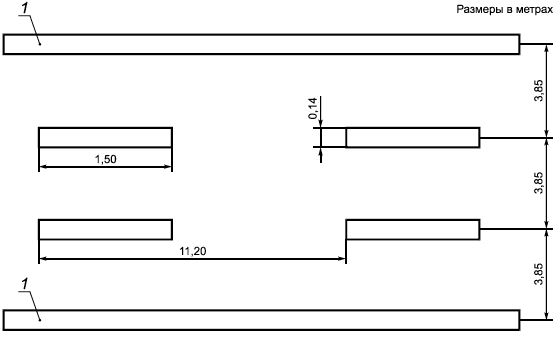
1 - линия края дороги
Рисунок 2 - Размеры дорожной разметки (не в масштабе)
3.4.2 Указатели
Каждый из указателей ("Старт" и "Смена полосы движения") отображается по обе стороны моделируемой дороги (пример расположения указателей см. на рисунке 1). Указатели "Смена полосы движения" имеют прямоугольную форму с тонкой черной границей и черными символами на белом фоне (см. рисунок 4). Размеры указателей составляют 2,0 м шириной и 1,0 м высотой, а нижняя граница расположена на высоте 1,0 м над землей. Стрелка вниз на указателе "Смена полосы движения" показывает целевую полосу движения. На рисунке 4 a), b) и c) представлены левая, средняя и правая полосы движения соответственно. Размеры указателя "Старт" могут соответствовать размерам указателя "Смена полосы движения", но цвета указателей должны быть различными (см. рисунок 3). Указатель "Старт" должен появиться примерно в 150 м до первого указателя "Смена полосы движения".
|

Рисунок 3 - Указатель "Старт"
|
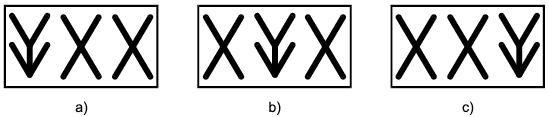
Рисунок 4 - Указатели "Смена полосы движения"
3.4.3 Структура эксперимента и измерений
3.4.3.1 Расположение дисплея
Для отображения дороги и прилегающей к ней территории (на мониторе или экране) угол обзора дисплея должен составлять от 20° до 55° по горизонтали. Расстояние до дисплея должно быть не менее 60 см. Зона видимости должна быть от -5° до +5° относительно глаз участника по горизонтали.
3.4.3.2 Расположение рулевого колеса
Рулевое колесо должно быть расположено таким образом, чтобы оно не мешало восприятию визуального изображения в процессе испытаний на смену полосы движения. Рулевое колесо должно быть удобно в использовании.
3.4.3.3 Стандартный сценарий
Стандартный сценарий испытаний для трека длиной 3000 м должен соответствовать следующим требованиям:
- инструктаж участников должен быть проведен строго в соответствии с предписанной инструкцией (см. приложение A);
- скорость должна быть задана и составлять не более 60 км/ч, в результате чего время прохождения трека составляет 180 с;
- по обе стороны трека должны быть расположены 18 пар указателей "Смена полосы движения".
3.4.3.4 Расстояние между указателями "Смена полосы движения"
Указатели "Смена полосы движения" всегда видны, но они отображаются белым фоном без символов до тех пор, пока расстояние до указателя не составит 40 м, после чего на указателе возникает обозначение полосы движения. Среднее расстояние между указателями составляет 150 м (минимальное значение 140 м плюс случайная величина, подчиняющаяся экспоненциальному распределению с математическим ожиданием 10 м), поэтому среднее время между двумя сменами полосы движения составляет около 9 с (при скорости 60 км/ч).
3.4.3.5 Порядок расположения указателей "Смена полосы движения"
Число перестроений шестью возможными способами (из левой полосы в среднюю полосу, из левой полосы в правую полосу и т.д.) должно быть сбалансировано среди 18 пар указателей. Эта балансировка применяется и в случае, если длина трека составляет более 3000 м. Если общее количество указателей, попарно расположенных по обе стороны трека, не кратно 18, балансировка должна быть выполнена в максимально возможной степени. В различных заездах указатели "Смена полосы движения" должны быть расположены случайным образом, что позволяет избежать получения недостоверных данных, связанных с обучаемостью водителя. Следует использовать не менее пяти различных вариантов расположения указателей, выбирая из них для испытаний один случайным образом.
3.4.3.6 Оборудование для выполнения второстепенной задачи
Оборудование для выполнения второстепенной задачи должно быть установлено таким образом, чтобы участники могли с ним правильно взаимодействовать. Положение оборудования зависит от цели испытаний: например, системы, предназначенные для использования в транспортном средстве, должны быть установлены в тех же местах по отношению к участнику, что и в реальном транспортном средстве.
3.4.3.7 Документирование
Поскольку условия эксперимента оказывают влияние на результаты, их описание, расстояние до дисплея, угол обзора дисплея, условия испытаний (персональный компьютер, тренажер или реальный автомобиль) и место установки оборудования должны быть зафиксированы в отчете.
Доказано, что более высокие результаты смены полосы движения могут быть достигнуты при использовании тренажера, а не персонального компьютера [12], предположительно за счет высокой визуальной реалистичности имитации на тренажере. Это подчеркивает необходимость точного описания установки каждой единицы оборудования до сопоставления результатов, полученных в различных условиях эксперимента.
3.5 Планирование эксперимента
3.5.1 Общие положения
При подготовке испытаний следует применять планирование эксперимента (см. приложение B, B.1). Это дает возможность каждому участнику получить опыт выполнения одной или двух задач и упростить статистическое сопоставление результатов в этих условиях. Кроме того, план эксперимента должен быть подготовлен таким образом, чтобы минимизировать появление эффектов обучения или тренированности при выполнении одной или двух задач (для примера см. рисунок 5).
Второстепенную задачу выполняют в процессе заезда на выполнение двух задач. Второстепенная задача может быть выполнена в соответствии с планом в виде блоков (одна и та же второстепенная задача, которую повторяют в процессе прохождения одного трека) или в соответствии с планом смешанного типа (различные второстепенные задачи выполняют в процессе прохождения одного трека). Обоснование см. в приложении B (В.2). Выполнение двух задач (основной и второстепенной) включают между базовыми блоками испытаний.
Каждый участник выполняет идентичные второстепенные задачи одинаковой сложности, но с разным расположением указателей. Порядок выполнения второстепенных задач, используемые части трека и их комбинации могут быть сбалансированными или случайными.
Для последующего анализа данных записывают начальную и конечную точки выполнения каждой второстепенной задачи, а также результаты управления транспортным средством в условиях выполнения одной и двух задач. Начальной точкой является обычно окончание устной инструкции. Конечной точкой является завершение последнего действия, совершенного участником при выполнении второстепенной задачи (например, нажатие кнопки), которое приводит к достижению установленной цели.
Общее время выполнения каждой второстепенной задачи должно составлять не менее 2 мин. Это означает, что в процессе выполнения второстепенной задачи должно быть выполнено не менее 12 смен полос движения.
В процессе проведения испытаний на смену полосы движения в условиях выполнения двух задач экспериментатор должен следить за тем, чтобы каждый участник следовал инструкциям и выполнял обе задачи в соответствии с инструкциями.
Если участник не выполняет инструкции по проведению испытаний (как описано в приложении A), эта часть данных должна быть исключена из анализа. Кроме того, если участник не выполняет второстепенную задачу, это должно быть зафиксировано и рассмотрено при анализе интерфейса.
3.5.2 Базовый заезд
При разработке плана эксперимента, но после завершения процесса обучения, данные базового заезда собирают в начале, середине и конце испытаний. Если выполняют только два базовых заезда во избежание слишком продолжительного эксперимента, их следует выполнять в начале и конце испытаний. Значения средних отклонений на базовом маршруте в дальнейшем можно сравнивать для проверки наличия влияния накопленного опыта. Участник может использовать обе руки для управления. В каждом базовом заезде должен быть использован один трек с 18 указателями (продолжительностью около 3 мин).
Участник должен выполнить по крайней мере один базовый заезд в начале испытаний без ошибок (таких как неправильный выбор или пропуск смены полосы движения). Это позволит обеспечить надлежащий уровень навыков и подготовки (см. приложение A), а также собрать данные по меньшей мере одного базового заезда, необходимые для расчета показателей на основе адаптированной модели (см. приложение E). При определении результативности базового заезда для сопоставления с результативностью выполнения двух задач значения mdev, полученные в результате нескольких безошибочных базовых заездов, могут быть усреднены.
3.5.3 Эксперименты блочного типа
При разработке плана эксперимента блочного типа одну и ту же второстепенную задачу с разными параметрами или аналогичную новую задачу повторяют в процессе одного заезда длительностью не менее 2 мин. (см. рисунок 5).
Для экспериментов блочного типа длина трека, равная 3 км (что соответствует 3 мин. управления транспортным средством), должна быть достаточной для сбора данных в течение 2 мин., с учетом времени прохождения инструктажа по каждой второстепенной задаче.
3.5.3.1 Эксперименты смешанного типа
При разработке плана эксперимента смешанного типа в процессе одного заезда выполняют различные второстепенные задачи (см. рисунок 5). При этом каждую второстепенную задачу необходимо выполнить такое количество раз, чтобы продолжительность записи данных составляла не менее 2 мин для каждой второстепенной задачи. Если необходимо выполнить более одной второстепенной задачи, потребуется провести более одного заезда.
При анализе все результаты, полученные в процессе выполнения второстепенной задачи, используют для расчета среднего отклонения.
|
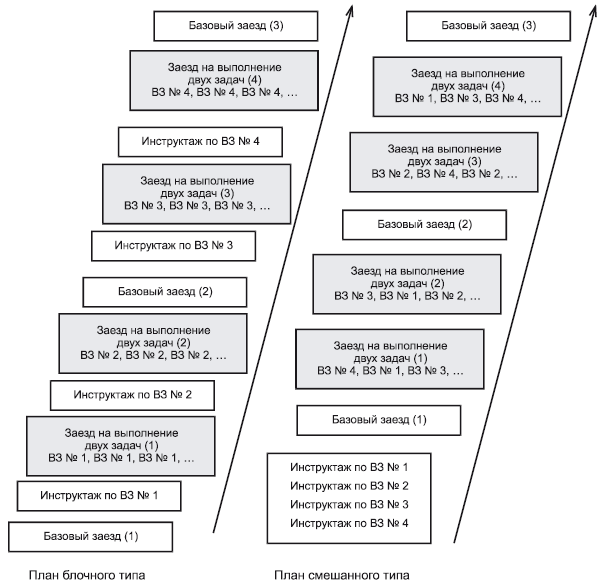
ВЗ - второстепенная задача
Рисунок 5 - Пример планов эксперимента блочного и смешанного типов
3.6 Процедура
3.6.1 Инструктаж и подготовка участников
Всем участникам необходимо предоставить одинаковые инструкции, с которыми они должны ознакомиться. В приложении A приведено описание инструктажа участников, в соответствии с которым участники должны:
- получить информацию об основной цели испытаний, в том числе инструкции по выполнению задачи смены полосы движения;
- пройти тренировочные испытания на выполнение только основной задачи;
- пройти тренировочные испытания на выполнение только второстепенной задачи;
- пройти тренировочные испытания на выполнение двух задач;
- пройти инструктаж перед началом первого базового заезда;
- пройти инструктаж перед началом заезда на выполнение двух задач;
- при необходимости пройти инструктаж в процессе заезда на выполнение двух задач.
В случае если участник не выполнил требование в отношении минимального среднего отклонения (см. приложение A, A.2) в связи с неправильным выбором полосы движения, важно подчеркнуть необходимость оставаться в средней полосе движения между сменами полос. По запросу для участников должен быть проведен инструктаж по выполнению основной и второстепенной задач (см. приложение A, A.4).
3.6.2 Распределение внимания при выполнении двух задач
3.6.2.1 Общие положения
Результативность прохождения испытаний на смену полосы движения зависит от того, как участники распределят внимание между основной и второстепенной задачами, которые они выполняют одновременно. Поскольку испытания на смену полосы движения являются методом распределения внимания, для того чтобы получить в результате испытаний последовательно интерпретируемые показатели (например, среднее отклонение), предполагают, что участник распределяет внимание таким образом, что если требования к выполнению второстепенной задачи увеличиваются, то это приведет к снижению результативности выполнения основной задачи.
Однако участники могут распределить внимание другим способом, даже если были тщательно проинструктированы. В этом случае результаты испытаний могут затруднить понимание того внимания, которое водитель должен уделить каждой второстепенной задаче. Например, две задачи могут давать одинаковые значения среднего отклонения, но существенно различаться по количеству ошибок, допущенных при выполнении каждой второстепенной задачи, количеству дополнительных (ненужных) записей, сделанных при выполнении каждой второстепенной задачи, или количеству второстепенных задач, выполненных в процессе заезда [10]. Интерпретация показателей, полученных в результате испытаний на смену полосы движения, приведена в приложении F.
Существует как минимум три различных способа, на основе которых участник может распределить внимание между задачами в процессе испытаний на смену полосы движения.
3.6.2.2 Больше внимания основной задаче
Участники могут распределить внимание таким образом, чтобы попытаться оптимизировать результативность выполнения основной задачи, допуская снижение результативности выполнения второстепенной задачи в случае чрезмерной нагрузки. Например, поскольку требование, связанное со сменой полосы движения, является периодическим (а не постоянным), участник может использовать стратегию, согласно которой выполнение второстепенной задачи приостанавливается во время смены полосы движения и возобновляется после завершения перестроения. Данная стратегия может привести к достижению лучших значений показателя mdev, но при этом к снижению результативности выполнения второстепенной задачи, замедляя его, увеличивая количество ошибок (если информация о необходимости выполнения задачи забыта или возникают трудности при ее возобновлении) или приводя к дополнительным действиям.
3.6.2.3 Больше внимания второстепенной задаче
Участники могут распределить внимание таким образом, чтобы сохранить или оптимизировать результативность выполнения второстепенной задачи, допуская снижение результативности выполнения основной задачи. В рамках данной стратегии чрезмерная нагрузка в результате выполнения двух задач отражается на показателях среднего отклонения, несмотря на то что результативность выполнения второстепенной задачи может не снизиться в условиях выполнения одной задачи.
3.6.2.4 Равномерное распределение внимания между основной и второстепенной задачами
Участникам предлагают одновременно управлять выполнением двух задач в соответствии с инструкцией, приведенной в приложении A (например, посредством частого переключения задач), с равномерным распределением внимания между двумя задачами. В рамках данной стратегии можно ожидать снижения результативности выполнения одновременно двух задач, если их совокупные требования превышают потенциал одномоментных ресурсов участника. В этом случае можно ожидать снижения показателей среднего отклонения и показателей результативности выполнения второстепенной задачи.
3.6.2.5 Интерпретация результатов выполнения двух задач
Распределение внимания еще не полностью изучено, и не определено, могут ли инструкции или мотивация обеспечивать одинаковое для всех участников распределение внимания между задачами. Изучение литературы по методам выполнения двух задач показало, что результаты лучше интерпретируются при одновременном получении показателей по выполнению двух задач и показателей по выполнению каждой задачи отдельно.
3.6.3 Детализация процедуры испытаний
Основной целью испытаний на смену полосы движения является сопоставление уровней снижения результативности выполнения каждой из двух или более второстепенных задач. Одной из второстепенных задач, как правило, может быть эталонная задача (см. 3.1). Испытания следует проводить в режиме работы с одним участником. Это означает, что для каждого участника должна быть определена результативность выполнения двух задач одновременно и сопоставлена с результативностью выполнения только одной или нескольких второстепенных задач, а в случае необходимости и с одной или несколькими эталонными задачами.
Экспериментатор должен провести инструктаж участника о том, когда следует начинать выполнение второстепенной задачи (см. приложение A, A.6). Время начала и окончание выполнения второстепенной задачи должно быть зафиксировано. Началом выполнения второстепенной задачи считают завершение устного инструктажа или начало выполнения участником действий, связанных с реализацией второстепенной задачи, в зависимости от того, что произойдет раньше. Если между окончанием инструктажа и началом выполнения участником второстепенной задачи существует задержка, то началом выполнения второстепенной задачи следует считать окончание инструктажа.
3.7 Показатели результативности и анализ данных
3.7.1 Мера отклонения маршрута движения
Для количественной оценки влияния выполнения второстепенной задачи на результативность выполнения основной задачи могут быть использованы два показателя отклонения маршрута движения. Эти показатели могут быть вычислены на основе адаптированной модели (адаптированное mdev) или базовой модели (базовое mdev). На основе адаптированной модели вычисляют эталонную траекторию (адаптированную кривую) базового заезда для каждого участника. Адаптированную модель и метод следует использовать для определения количественной оценки и сопоставления выполнения требований второстепенной задачи в различных условиях выполнения двух задач. Базовая модель также может быть использована для сопоставления результативности прохождения фактической траектории с условно заданной траекторией, одинаковой для всех участников. Использование базовой модели является необязательным.
Это означает, что показатели отклонения маршрута движения характеризуют важные аспекты результативности участников. К ним относят обнаружение (позднее обнаружение указателя или пропуск указателя), качество маневрирования (медленное перестроение приводит к большему отклонению) и качество удержания транспортного средства в пределах полосы движения, каждый из которых может привести к увеличению отклонения.
3.7.1.1 Адаптированная модель
Адаптированную модель следует использовать для определения количественной оценки различий между экспериментальными условиями. Влияние требований второстепенной задачи измеряют с помощью адаптированного mdev, которое представляет собой среднее отклонение фактической траектории движения участника по треку от эталонной траектории в рамках адаптированной модели (на рисунке 6 приведен пример моделируемой траектории движения и фактических данных управления транспортным средством). Эталонную траекторию корректируют для каждого участника, чтобы фактическое поведение водителя в процессе управления транспортным средством максимально соответствовало указателям при выполнении базовой задачи. В результате вычислений в рамках адаптированной модели начало смены полосы движения, длину участка смены полосы движения и боковое положение на полосе движения [как показано сплошной (ломаной) линией на рисунках 6 и 7] корректируют для соответствия базовому поведению участника. Детали этих процедур адаптации и вычисление полученной адаптированной траектории движения приведены в приложении E.
3.7.1.2 Базовая модель
Концепция и применение базовой модели аналогичны адаптированной модели, за исключением того, что эталонная траектория является условной и одинаковой для каждого участника (см. рисунок 8). Влияние выполнения требований второстепенной задачи измеряют с помощью базового mdev, которое представляет собой среднее отклонение фактической траектории движения участника по треку от условно заданной траектории базовой модели (см. рисунок 6). Условно заданная траектория базовой модели основана на геометрии и расположении указателей в соответствии с 3.4.3.4. Как только на указателе возникает обозначение смены полосы движения, время реакции участника по инициированию перестроения составляет 600 мс. В течение этого времени участник должен преодолеть расстояние 10 м (16,67 м/с0,6 с=10 м). Таким образом, траектория базовой модели до указателя "Смена полосы движения" составляет 30 м с учетом времени реакции участника. Базовая длина участка смены полосы движения составляет 10 м независимо от того, будет ли это смена одной или двух полос движения, как показано на рисунке 8.
3.7.2 Вычисление результативности с использованием адаптированного среднего отклонения
Среднее отклонение (адаптированное mdev) фактической траектории движения участника от траектории адаптированной модели следует вычислять как параметр результативности выполнения основной задачи. Для анализа следует использовать только тот или те участки трека, на которых участник выполняет второстепенную задачу, то есть те участки, на которых экспериментатор проводил инструктаж, исключают из анализа, если инструктаж длился более 1 с.
Для упрощения этой процедуры рассматриваемые участки трека должны быть отмечены экспериментатором соответствующими маркерами в записях в процессе каждого заезда. Испытания на выполнение второстепенных задач, которые не были завершены (из-за неспособности участников или ограничений по времени), тем не менее могут быть включены в анализ до того момента, пока участник работал над выполнением второстепенной задачи в силу своих возможностей в соответствии с инструкциями.
Примечание - В соответствии с указателями участник должен выполнить перестроение из средней полосы движения в правую полосу, а затем в левую полосу. Следует отметить, что рисунок 6 выполнен не в масштабе (направление движения - слева направо). Среднее отклонение маршрута движения представляет собой отношение общей площади между эталонной траекторией адаптированной или базовой модели и фактической траекторией движения (м) к пройденному расстоянию (м).
|
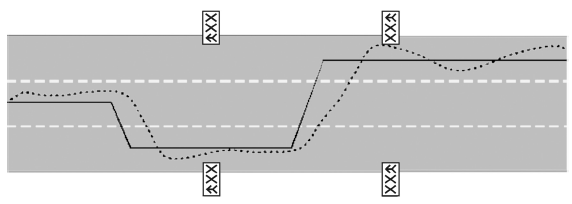
Рисунок 6 - Сопоставление эталонной траектории (сплошная линия) с фактической траекторией движения (пунктирная линия)
|

1 - появление обозначения на указателях (40 м); 2 - адаптированное положение на левой полосе движения; 3 - адаптированное положение на центральной полосе движения; 4 - адаптированное положение на правой полосе движения; 5 - адаптированное начало смены полосы движения; 6 - адаптированная длина участка смены полосы движения
Примечание - Пунктирная линия показывает неправильную смену полосы движения.
Рисунок 7 - Параметры траектории адаптированной модели относительно всплывающего обозначения на указателях и их расположения
|
1 - появление обозначения на указателях
Рисунок 8 - Параметры траектории базовой модели относительно всплывающего обозначения на указателях и их расположения
Среднее отклонение (mdev) фактической траектории движения от траектории адаптированной или базовой модели может быть вычислено следующим образом:
![]() (1)
(1)
![]() ,
,
где ![]() - боковое отклонение;
- боковое отклонение;
- длина анализируемого сегмента пути;
- продольное положение транспортного средства вдоль трека;
![]() - поперечное положение транспортного средства на фактической траектории;
- поперечное положение транспортного средства на фактической траектории;
![]() - поперечное положение транспортного средства на эталонной траектории (адаптированной или базовой модели).
- поперечное положение транспортного средства на эталонной траектории (адаптированной или базовой модели).
Данный расчет выполняют по всем сегментам данных, которые имеют важное значение в заданных экспериментальных условиях. Иными словами, некорректные сегменты данных (например, время инструктажа) исключают из анализа, а оставшиеся достоверные данные обрабатывают так, как если бы они были одним непрерывным набором данных. Данная процедура также применима к планированию эксперимента, где второстепенные задачи в условиях одного эксперимента распределены по нескольким испытательным заездам. В базовых заездах среднее отклонение вычисляют для участка между первым указателем и 50 м после последнего из 18 указателей смены полосы движения.
Полученные значения mdev должны быть вычислены для каждого участника и каждого значимого условия эксперимента: например, для базовых условий эксперимента, в условиях выполнения двух задач, причем для каждой второстепенной задачи в процессе одного испытания отдельно, и для эталонной задачи.
3.7.3 Показатели результативности выполнения второстепенной задачи
Поскольку в процессе испытаний на смену полосы движения участники могут распределять внимание различными способам*, должны быть получены показатели результативности выполнения основной задачи (адаптированное mdev), время выполнения второстепенной задачи, количество выполненных второстепенных задач и количество допущенных ошибок. Данные показатели результативности выполнения второстепенной задачи приведены в приложении F (F.1.2), их значимость зависит от вида задачи.
_______________
* Текст документа соответствует оригиналу. - .
3.7.4 Анализ различий в условиях выполнения двух задач
Анализ проводят путем сопоставления значений mdev. Он может включать сопоставление результативности выполнения двух различных сдвоенных задач или сопоставление результативности выполнения сдвоенной задачи с базовыми условиями. Разность значений mdev может быть статистически проанализирована [например, с использованием дисперсионного анализа (ANOVA), критерия Стьюдента, критерия Фридмана и т.д., в зависимости от типа плана эксперимента и исследуемой задачи]. Все статистические параметры, значимые при сопоставлении, должны быть зафиксированы (например, t-значения, F-значения, p-значения, число степеней свободы, объем выборки и выбросы). На диаграммах данных рекомендуется использовать планки погрешностей со стандартными ошибками. Данные следует проанализировать на наличие выбросов, так как они могут повлиять на распределение среднего отклонения. Все обработки выбросов должны быть зафиксированы.
Несмотря на то что в результате сопоставления значений mdev (как указывалось выше) определяют общий показатель различий выполнения двух задач, в основном только одного показателя mdev может быть недостаточно для анализа различий выполнения двух второстепенных задач с одинаковыми значениями mdev (см. приложение F). Также отсутствие статистически значимого различия между значениями mdev не доказывает, что эти задачи эквивалентны. Дополнительные показатели результативности выполнения основной и второстепенной задач рассмотрены в приложении F и могут быть использованы для предоставления более полной информации. Данные показатели также могут позволить определить, отразится ли снижение результативности выполнения основной задачи в результате перегруженности ресурсами на показателе mdev или отразятся ли некоторые изменения в результативности выполнения двух задач на показателе выполнения второстепенной задачи.
3.8 Валидация
Результаты первоначальной валидации представлены в приложении G. Данные приведены из исследования по сопоставлению результативности выполнения сдвоенной задачи с выполнением восьми второстепенных задач различной степени сложности как в процессе моделируемых испытаний на смену полосы движения, так и в реальных условиях. Результаты показывают корреляцию значений mdev, полученных в процессе моделируемых испытаний, со стандартным отклонением при движении по дороге в реальных условиях. Также представлены результаты исследований, проведенных при использовании тренажера. Дополнительные исследования по валидации следует проводить по мере накопления опыта применения испытаний на смену полосы движения.
Приложение A
(обязательное)
Инструктаж участников
A.1 До начала тренировочных испытаний на выполнение основной задачи
План инструктажа участников, предшествующий тренировочным испытаниям на выполнение основной задачи:
- приветствие участников и краткое их информирование о цели, продолжительности и процедуре испытаний, включая управление транспортным средством по моделируемой дороге, смену полосы движения и выполнение различных задач одновременно;
- доведение до сведения участников того, что целью испытаний является не проверка навыков участников, а определение, насколько выполнение задач различной сложности влияет на результативность управления транспортным средством;
- описание трехполосной моделируемой дороги, продолжительности каждого заезда, в процессе которого участник должен управлять транспортным средством со скоростью 60 км/ч в рамках системы ограничения скорости и выполнять перестроение в соответствии с указателями смены полосы движения;
- описание указателей смены полосы движения и значений символов;
- информирование участников о необходимости по возможности оставаться в центре полосы при движении по прямой;
- информирование участников о необходимости начинать смену полосы движения сразу при появлении на указателе символов, но не раньше;
- информирование участников о необходимости выполнения смены полосы движения быстро и эффективно (под эффективной сменой полосы движения обычно подразумевают завершение перестроения до указателя);
- обеспечение участникам возможности задавать вопросы;
- предложение участникам занять свое место перед монитором тренажера (макета или реального транспортного средства) и отрегулировать сиденье и рулевое колесо в удобное положение; при необходимости (например, ограничения положения тела и досягаемости), участника следует попросить пристегнуть ремень безопасности;
- повторение инструкции по управлению транспортным средством и информирование участников, что в конце трека моделируемое испытание будет завершено.
A.2 Тренировочные испытания на выполнение основной задачи
Участники должны пройти тренировочные испытания на выполнение основной задачи без выполнения одной или нескольких второстепенных задач. В качестве основной задачи следует использовать задачу управления транспортным средством. В качестве критерия может быть использовано значение mdev, составляющее в рамках адаптированной модели менее 0,7 м в базовых условиях. При использовании базовой модели каждый участник должен достичь значения mdev менее 1,2 м. Одного тренировочного испытания (3 мин) обычно достаточно. Если критерий не достигнут, то тренировка должна быть продолжена до тех пор, пока участник не достигнет требуемого значения критерия и не станет легко выполнять задачу управления транспортным средством.
Экспериментатор должен позволить участникам привыкнуть к реакции смоделированного транспортного средства путем предоставления возможности свободного пересечения полос движения и используя многочисленные функции рулевого колеса при смене полосы движения.
В процессе тренировочных испытаний на выполнение основной задачи экспериментатор должен по мере необходимости поддерживать обратную связь с участниками с тем, чтобы они:
- правильно удерживали транспортное средство в пределах полосы во время движения по прямой;
- начинали смену полосы движения, как только на указателе возникают символы, но не раньше этого;
- выполняли смену полосы движения быстро и эффективно;
- оставались в центре полосы между сменами полосы движения.
Участник должен выполнить по крайней мере один базовый заезд без ошибок в процессе смены полосы движения (таких как неправильный выбор или пропуск смены полосы движения) с тем, чтобы убедиться в его соответствии требованиям для участия в испытаниях и обеспечить хотя бы одно базовое условие безошибочного выполнения для использования в адаптированной модели.
A.3 Тренировочные испытания на выполнение второстепенной задачи
До начала проведения испытаний в соответствии с 3.6.3 каждому участнику необходимо объяснить работу системы и второстепенные задачи исследования. В качестве второстепенной задачи следует использовать дополнительную задачу. До каждого участника должна быть доведена информация о количестве второстепенных задач и плане эксперимента, будет ли он смешанного или блочного типа. Необходимо объяснить участнику особенности смешанного и блочного типов эксперимента. У каждого участника должно быть от двух до пяти тренировочных испытаний по каждой исследуемой второстепенной задаче. Может быть проведено меньшее количество тренировочных испытаний, если участник имеет достаточную подготовку для выполнения задачи. По второстепенным задачам, для которых не определена продолжительность выполнения (непрерывные задачи), тренировку следует выполнять не менее 30 с. Тренировочные испытания на выполнение второстепенной задачи необходимо проводить в условиях выполнения одной задачи. Если участники не могут успешно выполнить задачу хотя бы в одном из пяти тренировочных испытаний, то интерфейс и метод подготовки участников должны быть пересмотрены.
Количество тренировочных испытаний для каждого участника и задачи должно быть записано. Данные, которые должен считывать или вводить участник при выполнении второстепенной задачи в процессе тренировочных испытаний, должны отличаться от данных, используемых при контрольных испытаниях, но быть эквивалентны им по уровню сложности. Каждая тренировочная задача должна быть выполнена с использованием установленного метода, а экспериментатор должен стремиться обеспечить правильное выполнение задачи посредством инструктирования или оказания помощи, если у участника возникают трудности с выполнением задачи.
При необходимости проведения инструктажа по выполнению второстепенных задач во время испытаний на выполнение двух задач инструкции должны быть максимально короткими и лаконичными. При этом следует обеспечить понимание этих инструкций участниками.
Рекомендуется, чтобы каждый участник в процессе испытаний выполнил задачу калибровки, в лучшем случае два раза (с двумя разными уровнями сложности). Задача калибровки может быть использована для упрощения контроля качества в лаборатории и сравнения различных испытаний, проведенных в разных местах. При использовании двух уровней сложности задача калибровки устанавливает критерий чувствительности относительно условий эксперимента. Например, если критерий не позволяет различать два уровня задач калибровки, которые значимо отличались в предыдущих испытаниях, процедуры и результаты данного исследования должны быть пересмотрены.
A.4 Тренировочные испытания на выполнение двух задач (основной и второстепенной)
Участники должны пройти тренировочные испытания на выполнение двух задач. Данные, которые должен считывать или вводить участник при выполнении второстепенной задачи в процессе таких испытаний, должны отличаться от данных, используемых в других испытаниях (тренировочных и контрольных), но быть эквивалентны им по уровню сложности.
Участник должен быть информирован о том, каким образом ему будет предложено начать выполнение второстепенной задачи, как задача должна быть начата и как участник должен сообщить о завершении выполнения задачи.
Участника следует проинформировать о необходимости выполнения задачи управления транспортным средством и дополнительной задачи по мере возможности с одинаковым распределением внимания этим задачам, о необходимости выполнения смены полосы движения быстро и эффективно, о необходимости оставаться в центре полосы между сменами полосы движения, а также выполнять дополнительную задачу в соответствии с инструкциями.
A.5 Инструктаж перед началом первого базового заезда
Экспериментатор должен напомнить участникам о необходимости:
- правильно удерживать транспортное средство в пределах полосы при движении по прямой и оставаться в центре полосы между сменами полосы движения;
- начинать смену полосы движения, как только на указателе возникают символы, но не раньше;
- выполнять смену полосы движения быстро и эффективно.
A.6 Инструктаж перед началом заезда на выполнение двух задач
Экспериментатор должен достаточно подробно описать второстепенные задачи, которые необходимо выполнить в процессе следующего заезда на выполнение двух задач, и проинструктировать участника о начале выполнения второстепенной задачи сразу после окончания инструктажа. Если завершение выполнения второстепенной задачи не очевидно для экспериментатора, участники должны быть проинструктированы о необходимости устного информирования экспериментатора об окончании выполнения задачи. Также участникам должны быть предоставлены инструкции по общей процедуре испытаний (блочного или смешанного типа).
A.7 Инструктаж в процессе заезда на выполнение двух задач
В процессе заезда на выполнение двух задач экспериментатор должен сообщить участнику о начале выполнения второстепенной задачи посредством устного инструктирования, которое должно быть максимально кратким и понятным (например, "введите на вашем навигационном устройстве пункт назначения"). Как только участник закончил выполнение второстепенной задачи, экспериментатор должен объяснить ему следующую задачу, после чего участник должен начать ее выполнение. Важно, чтобы участник выполнял второстепенные задачи в установленной последовательности, например ABC, а не ACB. При необходимости участнику должно быть предоставлено руководство по выполнению второстепенной задачи.
Приложение B
(справочное)
План эксперимента
B.1 Многократные измерения
Следует понимать, что навыки управления транспортным средством в целом, а также смены полосы движения у различных участников могут быть различны. Эти различия компенсируют посредством проведения эксперимента с повторением измерений и применения дисперсионного анализа. В соответствии с планом эксперимента каждый участник осуществляет свой собственный контроль, что повышает статистическую мощность процедуры. Для достижения минимальной статистической мощности в испытаниях должны принимать участие не менее 16 участников (см. 3.2). Если ожидаются незначительные воздействия, объем выборки следует соответственно увеличить [14]. В качестве дополнительного средства повышения эффективности испытаний рекомендуется формировать группу участников так, чтобы она была однородной по возрасту или другим демографическим факторам.
B.2 Этап выполнения двух задач
На этапе выполнения двух задач в процессе испытаний второстепенную задачу, например работу с информационно-управляющей системой транспортного средства (ИУС ТС), выполняют одновременно с основной задачей. Второстепенная задача может быть блочного типа (одна и та же второстепенная задача, которую повторяют в процессе одного заезда продолжительностью 3 мин) или смешанного типа (различные второстепенные задачи выполняют в процессе одного заезда). При проведении эксперимента смешанного типа в процессе сбора данных каждая второстепенная задача должна быть обозначена цифровыми символами.
Оба типа плана эксперимента (блочное и смешанное) имеют свои преимущества и недостатки. Недостатком плана блочного типа является то, что он может выглядеть неестественным или искусственно-созданным (например, постоянная смена радиостанции или регулярная настройка звука радиоприемника). С другой стороны, при проведении эксперимента блочного типа достаточно легко инструктировать участника, ему необходимо помнить выполнение только одной второстепенной задачи. Кроме того, в результате эксперимента блочного типа могут быть достаточно легко получены субъективные оценки.
При проведении эксперимента смешанного типа в процессе испытаний участник должен помнить выполнение всех второстепенных задач. Поэтому инструктаж и подготовка участников при проведении эксперимента смешанного типа значительно сложнее, чем при проведении эксперимента блочного типа. В то же время выполнение различных второстепенных задач в процессе одного заезда может выглядеть более естественным. Однако крайне важно для анализа данных, чтобы продолжительность всего заезда была достаточной для выполнения всех второстепенных задач. В результате простые задачи (например, настройка звука) необходимо выполнять намного чаще, чем более сложные задачи (например, ввод пункта назначения).
В неопубликованном исследовании, проведенном лабораторией DaimlerChrysler в 2005 году при участии 18 водителей (13 мужчин, 5 женщин, возраст - от 22 до 40 лет), приведено систематическое сопоставление плана блочного типа с планом смешанного типа в части выполнения шести второстепенных задач. Задачами были: распаковка бумажного носового платка, поиск по карте в бумажном виде, еще более сложный поиск по карте в бумажном виде, смена кассеты, настройка звука радиоприемника и вход в систему навигации. Анализ значений среднего отклонения, полученных в результате испытаний на смену полосы движения, показал, что задачи значительно отличались друг от друга [F(5,85)=10,77, p<0,001]. Однако тип плана эксперимента (блочное и смешанное) не оказывал существенного влияния [F(1,17)=1,57, p=0,23]. Особенно важно, что между второстепенными задачами и типом плана также отсутствовала существенная взаимосвязь [F(5,85)=1,16, p=0,34]. Таким образом, результаты выполнения второстепенных задач не зависят от типа плана эксперимента (блочного или смешанного). Продолжительность выполнения задачи также существенно не зависит от типа плана эксперимента [24,4 с по сравнению с 27,8 с, F(1,17)=1,93, p=0,183]. Небольшая разность, составившая 3,4 с, возникла в основном в результате выполнения двух задач, связанных с поиском по карте в бумажном виде. В процессе данного исследования ожидаемые преимущества и недостатки обоих типов плана эксперимента были подтверждены. Однако оценка необходимого количества задач при проведении эксперимента смешанного типа оказалась достаточно сложной.
B.3 Эталонная задача
Эталонная задача представляет собой стандартизированную второстепенную задачу. Эталонную задачу используют для определения степени отвлечения водителя, что приводит к соответствующему уровню результативности выполнения основной задачи. Эталонная задача должна быть однозначной по своей реакции и результативности, и в сочетании с основной задачей результатом должно стать поведение водителя, на основе которого устанавливают эталонный уровень снижения результативности управления транспортным средством. Эталонную задачу, используемую для сравнения различных мест проведения испытаний или испытаний в целом, называют задачей калибровки.
Предложен целый ряд эталонных задач, связанных с управлением автомобилем: например, настройка радиоприемника, описанная в декларации принципов Объединения автомобилестроительных компаний. Однако эти эталонные задачи однозначно не определены и могут изменяться в зависимости от условий выполнения. Другие задачи, не связанные с управлением транспортным средством, были использованы, например, в рамках проекта ADAM [11] и [17], но их также сложно однозначно определить. Как правило, большинство эталонных задач, которые могут применяться при выполнении двух задач (например, в испытаниях на тренажере или в реальных условиях), могут быть использованы и в испытаниях на смену полосы движения.
Примечание - Для определения одной или нескольких задач калибровки, которые могут быть использованы в качестве эталонных задач, применяют ISO/TS 14198 [1].
B.4 Анализ данных
Вышеуказанное структурное сходство испытаний на смену полосы движения с классическим экспериментом на время реакции (всплывающие обозначения на указателях в качестве стимула, а рулевой маневр рассматривают как реакцию) позволяет вычислить ряд эквивалентов в отношении времени реакции: например, время между появлением обозначения на указателе и началом маневра смены полосы движения. Показатель качества удержания транспортного средства в пределах полосы движения между перестроениями может быть использован по аналогии в исследованиях при моделировании управления транспортным средством. Кроме того, качество маневров смены полосы движения может быть оценено в виде показателя, характеризующего степень отвлечения водителя на выполнение второстепенных задач в процессе испытаний. Также количество пропущенных указателей может быть использовано в качестве дополнительного показателя выполнения требований второстепенной задачи.
Чтобы анализ данных был простым с одной стороны, а с другой стороны, чтобы была возможность применять сложный уровень управления транспортным средством, разработан единый показатель, который охватывает все эти свойства: отклонение (mdev) фактической траектории движения от траектории адаптированной или базовой модели. На рисунке B.1 показано, как различные особенности поведения водителя отражаются на показателе отклонения: плохое выполнение в отношении любой из этих особенностей управления транспортным средством приводит к увеличению индекса отклонения. Более детальный анализ приведен в приложении F.
|

Рисунок B.1 - Отклонение от адаптированной или базовой модели
Примечание - На рисунке B.1 показано, как запоздалая реакция (наверху слева), выполнение маневров с малой скоростью (наверху справа), плохое удержание транспортного средства в пределах полосы движения (внизу слева) и пропуск указателей (внизу справа) увеличивают отклонение зафиксированной траектории движения (синяя линия) от траектории адаптированной или базовой модели (зеленая линия). Направление движения - слева направо.
Приложение C
(справочное)
Обоснование метода исследований
C.1 Методы измерений требований второстепенной задачи
Янг, Реган и Хаммер (2003) определили следующие научные методы измерения степени отвлечения водителя:
- исследования, проводимые на реальной дороге или испытательном треке;
- исследования, проводимые при использовании тренажера;
- исследования выполнения двух задач;
- анализ данных мониторинга взгляда;
- метод визуальной окклюзии;
- задача периферийного обнаружения;
- измерение времени выполнения статичной задачи.
Между этими методами имеются существенные различия по отношению к ожидаемому качеству эмпирических исследований и результатам. Каждый из этих методов имеет свои преимущества и недостатки. Основными требованиями к методам измерений являются объективность, достоверность, чувствительность, валидность, интрузивность и эффективность, между которыми существует тесная взаимосвязь, описанная ниже.
Объективность означает, что ни экспериментатор, ни условия эксперимента (лаборатория, оборудование) не оказывают систематического воздействия на результаты. Независимо от места проведения испытаний должны быть получены одинаковые результаты.
Достоверность означает устойчивость или воспроизводимость результатов измерений. Достоверный метод обеспечивает точность результатов измерений в различных испытаниях, различных совокупностях и разных формах. Достоверность отражает точность измерений (как техническую, так и процессуальную).
Чувствительность тесно связана с достоверностью. Чувствительность означает способность к дискриминации. Кроме достоверности, для обеспечения высокой чувствительности необходимо использование мелкомасштабной шкалы. Например, испытания, в которых используют только оценки "хорошо", "средне", "плохо" менее чувствительны, чем те же испытания с применением 10-балльной шкалы.
Валидность означает способность метода выполнять требуемые измерения. В данном случае метод должен измерить или оценить влияние выполнения второстепенной задачи на результативность водителя и ничего больше. Теоретически этот метод должен спрогнозировать увеличение вероятности аварии или других сложных ситуаций при выполнении второстепенной задачи. Валидность тесно связана с реалистичностью сценария. Однако реалистичный сценарий не гарантирует высокую валидность. Также важно отметить, что измеряют только корректные параметры (указанные в требованиях). Кроме того, валидность (в техническом смысле) может быть продемонстрирована только в случае подтверждения достоверности.
Интрузивность можно рассматривать как подкритерий валидности. Если метод измерений при выполнении второстепенной задачи повлиял на выполнение второстепенной задачи или условия управления транспортным средством с использованием ИУС ТС, этот метод нельзя назвать интрузивным, а его валидность может быть сильно снижена.
Эффективность означает, что качество результатов и усилия по их достижению должны быть сбалансированы. Можно оборудовать сотни транспортных средств для выполнения целевой второстепенной задачи и сравнить данные о дорожно-транспортных происшествиях после двух или трех лет в контролируемой группе. Валидность этого метода является достаточно высокой, но издержки, продолжительность и безопасность для участников испытаний являются неприемлемыми. Другой крайностью является заполнение ведомости результатов испытаний силами одного специалиста. Это недорогой подход, но вряд ли он соответствует перечисленным критериям качества (например, объективности).
C.2 Принцип испытаний на смену полосы движения
Метод проведения испытаний на смену полосы движения должен соответствовать следующим требованиям:
a) иметь высокую валидность;
b) отражать мануальные, визуальные и когнитивные аспекты управления транспортным средством;
c) включать важные элементы выполнения задачи управления транспортным средством:
- следование по маршруту и маневрирование,
- обнаружение события;
d) распознавать второстепенные задачи различного уровня требований;
e) предоставлять количественные результаты;
f) быть воспроизводимым методом измерений;
g) быть полезным практически на всех этапах разработки продукции и в реальных транспортных средствах.
C.3 Испытания на смену полосы движения как сочетание моделирования управления транспортным средством и задачи на реакцию при обнаружении зондового стимула
Испытания на смену полосы движения разработаны для объединения исследований на основе моделирования управления транспортным средством и задач на реакцию при обнаружении зондового стимула [17]. Общие параметры моделирования управления транспортным средством могут быть сильно приближены к реальным условиям. К тому же дорожная ситуация не представляет опасности для участников испытаний, а выполнение действий (например, торможения транспортного средства) может контролировать экспериментатор. Однако чем более реалистичный сценарий при моделировании управления транспортным средством, тем более сложным и неоднозначным может быть анализ данных и его интерпретация. Обычно в процессе моделирования управления транспортным средством измеряют показатели продольного и поперечного управления (наряду с другими), и изменение одного показателя следует интерпретировать с учетом другого показателя. Например, изменение направления движения следует интерпретировать по-разному для водителя, который снижает скорость, если требуется применить ИУС ТС, и для участника испытаний, который предпочитает держать скорость постоянной. Реалистичные сценарии имеют некоторые ограничения. В частности, неожиданные события (например, неожиданно появившийся пешеход на дороге) можно использовать только несколько раз, поскольку в противном случае они не сильно повлияют на водителя. Поэтому достаточно сложно собрать соответствующие данные для обеспечения надлежащего и полноценного статистического анализа.
Задача периферийного обнаружения представляет собой один из примеров так называемой задачи на реакцию при обнаружении зондового стимула. В таких задачах простой стимул (например, звук или малый свет) возникает неоднократно, и обычно участник испытаний должен отреагировать на него простым нажатием кнопки как можно скорее. Время реакции на зондовый стимул измеряют в процессе выполнения участником задачи ИУС ТС. Обычно это представляет собой парадигму выполнения двух задач (см. ниже). Предполагается, что время реакции в этой парадигме отражает свободные когнитивные возможности, и время реакции на зондовый стимул представляет собой индекс когнитивной сложности задач, выполненных одновременно [16]. Когда парадигму реакции на зондовый стимул используют в исследованиях по изучению требований второстепенной задачи в транспортном средстве, ее иногда применяют при выполнении тройной задачи, состоящей из (1) управления транспортным средством (реального или моделируемого), (2) задачи ИУС ТС и (3) задачи на реакцию при обнаружении зондового стимула. Преимуществами парадигмы реакции на зондовый стимул являются эффективное управление экспериментом (по крайней мере, для метода выполнения двух задач), большое количество ответов можно получить в течение ограниченного времени, и вследствие этого высокая достоверность, характерная для экспериментов на время реакции. Недостатком метода выполнения двух задач с измерением времени реакции на зондовый стимул является довольно низкая реалистичность. Вместо управления транспортным средством участники ничего не делают между двумя стимулами, а это вполне может привести к различным стратегиям в отношении распределения внимания по сравнению со сценарием управления транспортным средством. Метод тройной задачи (который включает в себя реальное или моделируемое управление транспортным средством) может быть поставлен под сомнение с точки зрения интрузивности, поскольку тройная задача (обнаружение зондового стимула и реагирование на него) не является ни частью задачи управления транспортным средством в реальных условиях, ни частью задачи ИУС ТС.
Испытания на смену полосы движения имеют признаки как метода моделируемого управления транспортным средством, так и парадигмы реакции на зондовый стимул. Испытания на смену полосы движения можно рассматривать как простое моделируемое управление транспортным средством с обнаружением стимулов (всплывающие указатели) и реакцией на них (инициирование маневра смены полосы движения), заложенными в задачу управления транспортным средством. С другой точки зрения, испытания на смену полосы движения можно рассматривать как парадигму реакции на стимулы с комплексом стимулов (указателей со стрелками), комплексом ответов (рулевого маневра) и задачу удержания транспортного средства в пределах полосы движения между двумя последовательными перестроениями. В этом случае исключено возможное недопонимание, что испытания на смену полосы движения предполагают применение реалистичного моделируемого управления транспортным средством, которое не является обязательным требованием.
Чтобы избежать зависимости между показателями поперечного и продольного управления транспортным средством, последний был полностью исключен. В связи с этим скорость регулируется с использованием программного обеспечения и составляет не более 60 км/ч.
C.4 Основная и второстепенная задачи испытаний на смену полосы движения
Основной задачей испытаний на смену полосы движения является моделируемая задача управления транспортным средством, которая отражает набор визуальных, когнитивных и моторных требований управления транспортным средством. Основная задача требует определенного внимания для ее надлежащего выполнения. Средний интервал между двумя сменами полосы движения, равный 9 с, был выбран на основе пилотных испытаний, проводимых при разработке испытаний на смену полосы движения. Более длительные интервалы могут привести к нежелательному ряду случаев, когда короткие второстепенные задачи могут быть полностью выполнены между двумя сменами полосы движения. С другой стороны, более короткие интервалы могут сильно усложнить выполнение основной задачи. Выполнение второстепенной задачи одновременно с основной задачей приведет к отвлечению внимания водителя от основной задачи на второстепенную задачу. В результате результативность выполнения основной задачи может измениться и снизиться. В этом случае изменение результативности выполнения основной задачи можно измерить.
Второстепенными задачами (в отличие от вспомогательных задач, используемых для оценки дополнительных возможностей участника в определенной ситуации путем измерения результативности выполнения вспомогательной задачи) являются задачи, выполняемые одновременно с основной задачей. В соответствии с настоящим стандартом при определении второстепенной задачи не существует никаких ограничений при условии, что она совместима с процедурой смены полосы движения (например, обратная связь рулевого управления, которая может зависеть от угла поворота рулевого колеса). Экспериментатор должен выбрать второстепенные задачи, которые предстоит исследовать, и определить, как эти задачи должны быть применены. Примерами второстепенных задач являются:
- задачи в транспортном средстве (например, выбор радиостанции, настройка автомобильного радиоприемника на определенную частоту, изменение настроек звука, смена компакт-диска в CD-проигрывателе, установка нового пункта назначения в навигационной системе, изменение масштаба карты навигации);
- подгруппы задач в транспортном средстве (например, навигация с помощью системы меню от одного приложения к другому, использование программы проверки орфографии);
- искусственные задачи, разработанные для целей исследования (например, задачи визуального поиска для обеспечения определенного уровня зрительной нагрузки или математические задачи для вызывания когнитивной нагрузки), и
- другие виды действий (например, прием пищи, употребление напитков, поиск денег, чтение бумажных карт).
Применение этих задач зависит от цели исследований. Например, чтобы начать выполнение задачи по настройке радиоприемника в условиях интегрированной системы, возможно, потребуется начать со стандартной настройки, при которой должна быть выбрана функция телефона. В этом случае выполнение задачи начинают с изменения аудиосистемы. В другом случае выполнение задачи можно начать с уже подключенной радиосистемы.
Важно, чтобы выбор и применение элементов задачи соответствовали высоким экспериментальным стандартам исследований в области человеческого фактора. Это включает, например, сбалансированную сложность элементов, сбалансированное количество вводимых действий, случайное или сбалансированное распределение участников испытаний по группам для исследования экспериментальных факторов. Также необходимо, чтобы участникам испытаний предоставляли максимально короткие и однозначные инструкции. Особенно это касается тех случаев, когда экспериментатор должен повторно проинструктировать участников на этапе выполнения двух задач (например, предоставить названия радиостанций, которые должны быть установлены участниками испытаний).
Приложение D
(справочное)
Адаптация при использовании реального транспортного средства
D.1 Общие положения
Испытания на смену полосы движения могут быть выполнены с использованием реального транспортного средства. При необходимости можно заменить рулевое колесо транспортного средства компьютерным рулевым колесом. Однако рекомендуется использовать стандартное рулевое колесо, поскольку это позволяет использовать элементы управления на рулевом колесе и вблизи него, а также все другие системы транспортного средства. Усилие, прикладываемое к рулевому колесу, должно быть доведено до приемлемого уровня. Это может быть достигнуто применением систем рулевого управления с гидравлическим или электрогидравлическим усилителем или силовым приводом. Если ни одно из этих решений не применимо, следует приложить все усилия для облегчения рулевого управления. В этом случае все элементы, которые не требуются для преобразования вращательного движения рулевого колеса в поступательное движение рулевых тяг, должны быть отключены.
D.2 Процедура адаптации
В настоящем приложении приведен один из возможных способов адаптации реального транспортного средства для использования в качестве тренажера при проведении испытаний на смену полосы движения. Могут быть использованы также другие способы адаптации.
Поворот рулевого колеса транспортного средства следует настроить таким образом, чтобы воспроизвести поворот компьютерного рулевого колеса в отношении поворота рулевого колеса к вычисленному радиусу поворота. (Предполагают, что максимальный поворот рулевого колеса составляет приблизительно ±120°.)
D.3 Процедура адаптации в случае применения усилителя для облегчения рулевого управления
Передние колеса испытываемого транспортного средства следует разместить на вращающихся пластинах для уменьшения трения о землю.
Движение одного переднего колеса должно быть преобразовано в электрический сигнал, совместимый с программным обеспечением испытаний, снимаемый либо с движения одной из вращающихся пластин либо напрямую с переднего колеса (например, через движение рулевых тяг).
D.4 Процедура адаптации без применения вспомогательных устройств рулевого управления
Транспортное средство следует приподнять, по крайней мере его передние колеса должны быть немного оторваны от земли, после этого следует снять оба передних колеса.
Шаровые шарниры рулевых тяг следует отсоединить от поворотных кулаков с обеих сторон транспортного средства.
Одну из рулевых тяг следует подключить к устройству, которое передает механическое движение рулевой тяги при повороте рулевого колеса в электрический сигнал, совместимый с программным обеспечением испытаний.
Приложение E
(обязательное)
Вычисление параметров испытаний на смену полосы движения в случае применения траектории, адаптированной к участнику
E.1 Общие положения
В настоящем приложении приведен метод вычисления эталонной траектории (кривой), адаптированной к участнику, в условиях базового заезда, когда участник управляет транспортным средством на протяжении всего трека без выполнения второстепенных задач. Адаптацию осуществляют путем вычисления для каждого участника индивидуальных параметров начала смены полосы движения, длины участка смены полосы движения и поперечного положения на каждой полосе движения в виде адаптированного положения X на полосе движения 1, адаптированного положения X на полосе движения 2, адаптированного положения X на полосе движения 3.
|
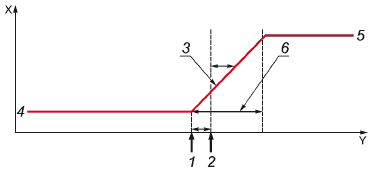
1 - начало смены полосы движения; 2 - положение указателя смены полосы движения; 3 - среднее расстояние; 4 - адаптированное положение X на полосе движения 2; 5 - адаптированное положение X на полосе движения 3; 6 - длина участка смены полосы движения
Рисунок E.1 - Параметры для вычисления адаптированной траектории (кривой)
При применении базовой модели используют те же два параметра траектории, что и в адаптированной модели (начало смены полосы движения и длина участка смены полосы движения), но кроме того, еще промежуточную переменную: среднее расстояние, которое соответствует расстоянию между положением указателя смены полосы движения и серединой участка смены полосы движения.
Затем получают адаптированную кривую путем двух вычислений, сначала вычисляют среднее расстояние, а затем длину участка смены полосы движения.
E.2 Среднее расстояние
Вычисление среднего расстояния выполняют в два этапа. На первом этапе вычисляют адаптированную кривую быстрой смены полосы движения. На втором этапе сопоставляют эту кривую с данными базового заезда, выполненного участником, для определения среднего расстояния.
|
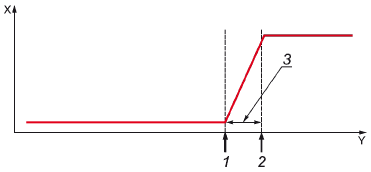
1 - начало смены полосы движения: ![]() ,
, ![]() ; 2 - конец смены полосы движения:
; 2 - конец смены полосы движения: ![]() ,
, ![]() ; 3 - длина участка смены полосы движения
; 3 - длина участка смены полосы движения
Рисунок E.2 - Определение кривой быстрой смены полосы движения
E.2.1 Кривая быстрой смены полосы движения
Сначала определяют набор указателей смены полосы движения в виде точек , по одной для каждой смены полосы движения. Каждую смену полосы движения определяют с помощью продольного положения
и поперечного положения, ожидаемого после смены полосы движения,
. Величина
может принимать только три значения: положение
на полосе движения 1, положение
на полосе движения 2 и положение
на полосе движения 3, в зависимости от занимаемого положения на траектории после смены полосы движения. Величина
обозначает положение указателя смены полосы движения на треке (в метрах). Математически набор указателей смены полосы движения может быть представлен следующим образом:
![]() . (E.1)
. (E.1)
Затем определяют кривую быстрой смены полосы движения по указателям смены полосы движения в процессе контрольного испытания. Быстрая смена полосы движения соответствует смене полосы движения с длиной 0,01 м. Для каждой смены полосы движения существуют две точки в новом наборе точек. Первая расположена в положении смены полосы движения с поперечным положением, соответствующим предыдущей смене полосы движения. Вторая расположена сразу после смены полосы движения (=0,01 м) с поперечным положением, соответствующим этой смене полосы движения. Математически данную кривую, называемую кривой 0-точек, определяет следующий набор точек:
![]()
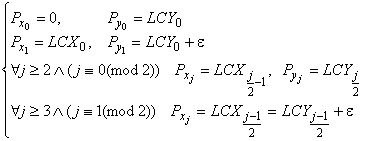 (E.2)
(E.2)
=0,01 м.
Затем эту кривую чертят с постоянным интервалом между точками (=0,1 м) для получения следующего показателя
:
_______________
- длина участка смены полосы движения базового заезда.
![]() , (E.3)
, (E.3)
где ![]() .
.
На рисунке E.3 представлена кривая быстрой смены полосы движения, полученная указанным выше методом.
|
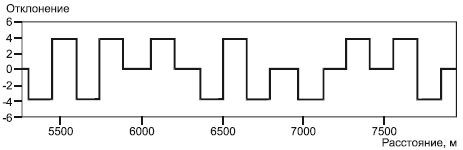
Рисунок E.3 - Кривая быстрой смены полосы движения
E.2.2 Сопоставление с данными базового заезда
На втором этапе чертят траекторию участника в условиях базового заезда без выполнения второстепенной задачи для получения следующего показателя:
![]() , (E.4)
, (E.4)
где ![]() .
.
Для оценки расстояния между положением указателей смены полосы движения и сменой полосы движения, выполненной участником в базовом заезде, используют метод корреляции. Этот метод позволяет вычислить функцию корреляции между одной кривой и другой кривой, выполненных по интервала между точками (м), где
принимает несколько значений от 0 до
. Затем вычисляют несколько значений, по одному для каждого переходного значения. Максимальное значение функции корреляции дает ближайшая кривая перемещения. Для оценки среднего расстояния необходима высокая точность максимального значения функции корреляции, которую получают с помощью несмещенной оценки функции корреляции, вычисленной между двумя кривыми. Математически данную кривую, называемую функцией корреляции кривая0/базовая кривая, определяют следующим образом:
![]()
 (E.5)
(E.5)
На рисунке E.4 представлены кривая0, данные базового заезда, выполненного участником, и функция корреляции для перемещения на участке от -300 до +300 м (второй график). В этом случае положение максимального значения функции корреляции соответствует 9,8 м. Это означает, что транспортное средство находится в середине участка смены полосы движения через 9,8 м после указателя смены полосы движения. Это значение соответствует выборочному среднему с учетом всех смен полосы движения в процессе базового заезда.
Затем определяют среднее расстояние участника как точку положения максимального значения функции корреляции в интервале от -100 до +100 м (9,8 м после указателя смены полосы движения, см. рисунок E.4). Математически это расстояние, называемое средним расстоянием (), определяют в виде:
![]() . (E.6)
. (E.6)
|

1 - положение максимума функции корреляции = -9,7 м
Рисунок Е.4 - Корреляция между кривой базовой заезда и кривой0
E.3 Средняя длина участка смены полосы движения адаптированной траектории (кривой)
Следующим этапом является определение улучшенной длины участка смены полосы движения. Метод выбора заключается, во-первых, в определении нескольких кривых с разной длиной участка смены полосы движения, во-вторых, в адаптации поперечного положения на каждой полосе движения, в-третьих, в сопоставлении с данными базового заезда для установления более точного соответствия.
E.3.1 Адаптированные траектории (кривые) с переменной длины участка смены полосы движения
Несколько значений длины участка смены полосы движения от 10 до 80 м, по одному на метр, образуют совокупность. Математически данную совокупность значений длины участка смены полосы движения () определяют следующим образом:
![]() , где
, где ![]()
 . (E.7)
. (E.7)
Как показано на рисунке E.5, несколько кривых вычислено на основе , определенного выше, и нескольких значений
(по одному для каждого значения
). Затем определяют середину участка смены полосы движения как расположенную на расстоянии
от указателя смены полосы движения. Начало смены полосы движения находится в (
![]() ) метрах до середины участка смены полосы движения, а конец смены полосы движения находится в (
) метрах до середины участка смены полосы движения, а конец смены полосы движения находится в (![]() ) метрах после середины участка смены полосы движения. Каждая кривая определяется совокупностью точек
) метрах после середины участка смены полосы движения. Каждая кривая определяется совокупностью точек . Математически эти кривые определяются несколькими наборами точек:
![]()
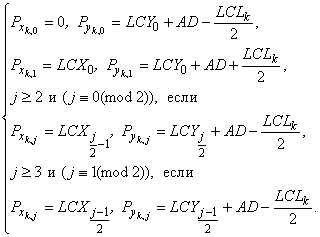 (E.8)
(E.8)
Построение этих кривых выполняют с постоянным интервалом между точками для получения нескольких кривых, по одной для каждой длины участка смены полосы движения.
![]() . (E.9)
. (E.9)
|
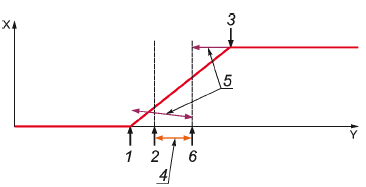
1 - начало смены полосы движения![]() ,
, ![]() ; 2 - положение указателя смены полосы движения; 3 - конец смены полосы движения:
; 2 - положение указателя смены полосы движения; 3 - конец смены полосы движения: ![]() ,
, ![]() ; 4 - среднее расстояние (
; 4 - среднее расстояние (); 5 -
![]() ; 6 - положение в середине участка смены полосы движения
; 6 - положение в середине участка смены полосы движения
Рисунок E.5 - Определение длины смены полосы движения с использованием переменных длин участка смены полосы движения
E.3.2 Адаптированное поперечное положение
Этот этап включает вычисление положения на каждой полосе движения, занимаемого участником в процессе базового заезда, для каждой кривой. Это вычисление выполняют три раза для кривой, один раз для полос движения. Например, чтобы адаптировать положение на полосе движения 1 кривой , необходимо выполнить следующие этапы. Все точки Первой кривой
, которые относятся к поперечному положению (положение
на полосе движения 1), выделяют в совокупность, называемую совокупностью точек полосы движения 1 (
![]() ). Затем вычисляют среднее поперечных положений по этим точкам и получают адаптированное положение для полосы движения 1 кривой
). Затем вычисляют среднее поперечных положений по этим точкам и получают адаптированное положение для полосы движения 1 кривой (
![]() ). Математически эти адаптированные положения, называемые
). Математически эти адаптированные положения, называемые ![]() ,
, ![]() ,
, ![]() , определяют следующим образом:
, определяют следующим образом:
![]() ,
,
где ![]() ;
;
![]() , (E.10)
, (E.10)
где ![]() ;
;
![]() ,
,
где ![]() .
.
Затем каждую кривую ![]() адаптируют в соответствии с вычисленными поперечными положениями на каждой полосе движения, заменяя
адаптируют в соответствии с вычисленными поперечными положениями на каждой полосе движения, заменяя соответственно
![]() , если значение
, если значение было положением
на полосе движения 1,
![]() , если значение
, если значение было положением
на полосе движения 2,
![]() , если
, если значение было положением
на полосе движения 3.
Эти кривые построены с постоянным интервалом между точками для получения нескольких кривых, по одной для каждой длины участка смены полосы движения.
![]() . (E.11)
. (E.11)
На рисунке E.6 представлены результаты построения кривых с различной длиной участка смены полосы движения.
|
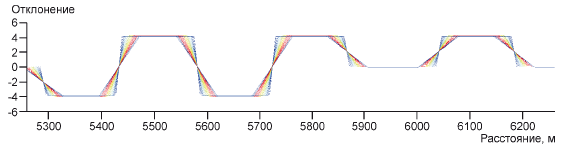
Рисунок E.6 - Совокупность кривых с различной длиной участка смены полосы движения
E.3.3 Выбор адаптированной траектории (кривой)
Данный этап включает, во-первых, вычисление всех функций корреляции и, во-вторых, выбор кривой с самой высокой функцией корреляции.
При вычислении функции корреляции основная цель состоит в сравнении корреляции между базовой кривой и кривыми с разной длиной участка смены полосы движения. Для этого функция корреляции должна быть нормализована по нормам двух кривых для проведения сравнения. Математически функцию корреляции между каждой кривой и базовой кривой (
![]() ) определяют следующим образом:
) определяют следующим образом:
![]()
![]() . (E.12)
. (E.12)
Выбор кривой, которая имеет наибольшее значение ![]() , выполняют путем сравнения всех значений и выбора максимального значения. На рисунке E.7 представлены значения функции корреляции для каждой длины участка смены полосы движения, где максимальное значение функции корреляции наблюдается для длины участка смены полосы движения, равной 35 м. В этом случае эта длина участка соответствует средней длине участка смены полосы движения для данного участника.
, выполняют путем сравнения всех значений и выбора максимального значения. На рисунке E.7 представлены значения функции корреляции для каждой длины участка смены полосы движения, где максимальное значение функции корреляции наблюдается для длины участка смены полосы движения, равной 35 м. В этом случае эта длина участка соответствует средней длине участка смены полосы движения для данного участника.
|

1 - максимальное значение функции корреляции
Рисунок Е.7 - Значения функции корреляции в зависимости от длины участка смены полосы движения
Адаптированную кривую определяют в соответствии с вычисленной средней длиной участка смены полосы движения. Математически длину участка смены полосы движения для участника (![]() ), начало смены полосы движения для участника (
), начало смены полосы движения для участника () и адаптированную кривую (
) вычисляют следующим образом:
Существует участник ![]() , такой что
, такой что
![]() ,
, ![]() .
.
Тогда
![]()
![]() (E.13)
(E.13)
![]() .
.
На рисунке E.8 представлен пример адаптированной кривой.
|
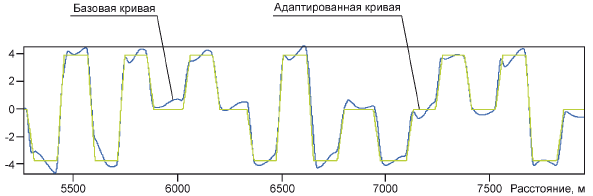
Примечание - Положение, занимаемое участником, на полосе движения 1 равно 3,9 м, на полосе движения 2 - -0,1 м, на полосе движения 3 - 4 м. Пример данных адаптированной кривой для участника 1: начало смены полосы движения - 26,6 м, длина участка смены полосы движения - 35 м.
Рисунок E.8 - Пример адаптированной кривой в сравнении с данными базового заезда
Приложение F
(справочное)
Интерпретация показателей, полученных в испытаниях на смену полосы движения
F.1 Процедуры для обеспечения интерпретируемости показателей LCT
Все показатели результативности, описанные в данном приложении, должны быть определены на основе завершенных задач (то есть задач, по которым цель была достигнута). Данные по незавершенным задачам не следует использовать в расчетах, но они должны быть проанализированы и приведены в отчете.
Для обеспечения интерпретируемости показателей LCT рекомендуется выполнить описанные ниже действия.
F.1.1 Оценка результативности выполнения одной задачи
Определение результативности выполнения каждой задачи в отдельности относится к условиям, в которых выполнялась задача. Для основной задачи результативность выполнения определяют на основе данных, полученных в процессе выполнения базового заезда.
Для каждой второстепенной задачи результативность выполнения определяют на основе данных, полученных в процессе заезда на выполнение второстепенной задачи. Если данный заезд не проводился, это следует указать в протоколе испытаний. В процессе испытаний участник выполняет каждую задачу только один раз, чтобы оценить, была ли задача достаточно хорошо изучена, и обеспечить выполнение базовых условий.
F.1.2 Показатели второстепенной задачи
В процессе испытаний на выполнение каждой второстепенной задачи в отдельности должны быть получены следующие показатели: среднее время выполнения задачи и количество допущенных ошибок или интенсивность ошибок.
Среднее время выполнения задачи определяют как период времени от информирования участников о начале выполнения задачи ("Пожалуйста, начинайте") до ее завершения (когда участник сообщает об окончании выполнения задачи или когда последний этап выполнения задачи завершен). При вычислении среднего времени необходимо определить время выполнения задачи каждым участником.
Примечание - Для очень продолжительных задач среднее время выполнения задачи может быть ограничено продолжительностью испытаний, в результате выполнение задачи прерывают или ограничивают количество выполненных задач. В этом случае продолжительность испытаний по возможности следует использовать в качестве основы при определении времени выполнения задачи. При оценке выполнения звуковой/голосовой второстепенной задачи время ее выполнения не является значимым показателем результативности, поскольку взгляд водителя по большей части направлен на дорогу в процессе выполнения задачи. Однако при использовании времени выполнения задачи в качестве параметра для сопоставления результативности выполнения второстепенной задачи при выполнении двух задач с результативностью в условиях выполнения одной задачи (используя коэффициент STP) сопоставление может быть эффективным способом оценки относительного снижения результативности.
При вычислении общего количества ошибок следует рассмотреть два типа ошибок. (Нет необходимости сохранять расчеты по каждому типу ошибок. Важно только убедиться, что оба типа ошибок учтены при вычислениях.) Ошибки входных данных управления подразделяют на два типа:
- ошибки, влияющие на успешное выполнение задачи: к ним относят ошибки, в результате которых участник не может успешно выполнить поставленную задачу.
Примечание - Необходимо учитывать ошибки, которые могут привести к неудачному выполнению задач, а не неудачно выполненные задачи;
- дополнительные действия: к ошибкам данного типа относят входные данные, которые приводят к "неоптимальному" и менее эффективному способу достижения поставленной цели (например, к более длительному выполнению задачи), или исправление ошибок первого типа (корректирующие входные данные). Следует отметить, несмотря на то что дополнительные действия не обязательно приводят к неудачному выполнению задачи, они являются ошибками в том смысле, что оказывают дополнительную нагрузку на участника и приводят к снижению результативности при определенных условиях.
Ниже приведены примеры двух типов ошибок:
- участник ввел пункт назначения и при выборе штата из списка фактически выбрал Миннесоту (по списку следующую за Мичиганом), хотя хотел выбрать Мичиган. Это является ошибкой, если участник не исправил ее, а если участник исправил данную ошибку, это приводит к дополнительным действиям и затратам времени. Таким образом, при определении общего количества ошибок следует учитывать обе модели поведения участника;
- участник набрал номер телефона и ошибся при вводе цифр. Эти ошибки влияют на успешное выполнение задачи и должны быть учтены в вычислениях. Если участник исправил ошибки, то они должны быть учтены как дополнительные действия. Или если участник нажмет кнопку "Отмена" после того, как ввел правильный номер телефона, вместо кнопки "Соединение", это следует считать ошибкой;
- участник просматривал перечень, чтобы найти интересующий его пункт, и пролистал его, после чего вернулся назад и нашел его после нескольких попыток. Эти ошибки являются дополнительными действиями.
Чтобы учесть оба типа ошибок, экспериментаторы должны определить начальное и конечное состояние для каждой задачи, а также последовательность действий для перехода из начального состояния в конечное состояние (достижение цели). Эта последовательность определяет объем действий, необходимых для оптимального достижения цели в поставленной задаче. Если участник использует больше действий, чем установлено, эти добавочные действия следует считать дополнительными. Если участник сделал ошибку (и не исправил ее), его действия будут отличаться от действий установленной последовательности.
Применение показателей второстепенной задачи зависит от типа плана эксперимента LCT (блочного или смешанного), как показано в таблице F.1.
Таблица F.1 - Применение показателей второстепенной задачи в зависимости от типа плана эксперимента LCT
Показатель второстепенной задачи | План блочного типа | План смешанного типа |
Среднее время выполнения задачи | Среднее время выполнения задачи в процессе заезда LCT | Среднее время выполнения задачи по всем поставленным задачам |
Общее количество ошибок | Общее количество ошибок, допущенных во время выполнения задач, суммированных на протяжении всего заезда | Общее количество ошибок, суммированных по всем поставленным задачам |
F.1.3 Коэффициент результативности выполнения второстепенной задачи
Для выбранного показателя выполнения второстепенной задачи результативность выполнения второстепенной задачи при выполнении двух задач можно сопоставить с тем же показателем результативности в условиях выполнения одной задачи, используя коэффициент результативности выполнения второстепенной задачи.
Коэффициент результативности выполнения второстепенной задачи относительно времени выполнения задачи может быть представлен следующим образом:
 ,
,
где ![]() - среднее время выполнения второстепенной задачи при выполнении двух задач;
- среднее время выполнения второстепенной задачи при выполнении двух задач;
![]() - среднее время выполнения задачи в условиях выполнения одной задачи.
- среднее время выполнения задачи в условиях выполнения одной задачи.
Коэффициент результативности выполнения второстепенной задачи относительно количества ошибок может быть представлен следующим образом:
![]() ,
,
где ![]() - общее количество ошибок, допущенных во время выполнения второстепенной задачи при выполнении двух задач;
- общее количество ошибок, допущенных во время выполнения второстепенной задачи при выполнении двух задач;
![]() - общее количество ошибок, допущенных во время выполнения одной задачи в условиях выполнения одной задачи, умноженное на количество этих задач, выполненных в процессе LCT.
- общее количество ошибок, допущенных во время выполнения одной задачи в условиях выполнения одной задачи, умноженное на количество этих задач, выполненных в процессе LCT.
Примечание - Если количество ошибок в знаменателе равно нулю, то для принятия решения следует использовать значение числителя.
В основном рассмотренные коэффициенты не рекомендованы для показателя среднего отклонения основной задачи. Вместо них следует использовать алгебраические разности значений средних отклонений, полученных в двух условиях выполнения задачи, в соответствии с 3.7.4.
F.2 Интерпретация разности значений среднего отклонения и коэффициента результативности выполнения второстепенной задачи
Разности значений mdev и коэффициенты результативности выполнения второстепенной задачи могут быть использованы для того, чтобы определить, приводит ли выполнение второстепенной задачи к снижению результативности в условиях выполнения нескольких задач. При применении адаптированной модели разность значений mdev почти всегда является положительной и вряд ли может быть значимо отрицательной. Значение выбранного коэффициента STP может быть больше или меньше 1,0. Если коэффициент STP не превышает 1,0, то для оценки требований второстепенной задачи может быть использовано только значение mdev. Если коэффициент STP превышает 1,0, то для оценки требований второстепенной задачи могут быть использованы и значение mdev, и коэффициент STP.
F.3 Дополнительные показатели основной задачи, полученные в процессе LCT
Как известно, различные аспекты требований второстепенной задачи оказывают качественно разное влияние на результативность выполнения основной задачи. В основном выделяют визуально-мануальные и когнитивно-звуковые задачи ([19], [18], [9], [15]). В частности, выполнение визуально-мануальных задач (например, настройка радиоприемника) обычно оказывает сильное влияние на результативность управления транспортным средством, в то время как выполнение когнитивно-звуковых задач (например, телефонный разговор) отражается на результативности обнаружения событий, но оказывает незначительное влияние на результативность управления транспортным средством. Несмотря на то что в реальных условиях второстепенные задачи включают как визуально-мануальные, так и звуковые когнитивные аспекты, соответствующие им весовые коэффициенты различны. Многие звуковые задачи (например, разговор по мобильному телефону или речевое взаимодействие) могут быть рассмотрены как исключительно когнитивно-звуковые (то есть их выполнение не требует отрыва глаз от дороги или рук от рулевого колеса).
В соответствии с 3.1 испытания на смену полосы движения могут быть рассмотрены как одновременное выполнение задач по управлению транспортным средством и обнаружению событий с определением показателя mdev для оценки как визуально-мануальных требований второстепенной задачи (с точки зрения снижения результативности управления в процессе смены полосы движения и между ними), так и когнитивно-звуковых требований (с точки зрения пропуска и/или несвоевременного обнаружения указателей смены полосы движения). Преимущество использования показателя mdev состоит в том, что его просто и легко вычислить. При этом различия в управлении транспортным средством и обнаружении событий способствуют повышению чувствительности и диагностической ценности метода. Некоторые исследования показали, что показатель mdev чувствителен к воздействиям, влияющим на другие показатели [13]. Кроме того, во многих случаях желательно определять, что причиной отклонения от эталонной траектории являются особенности интерфейса "человек - машина". Например, сложный уровень голосового интерфейса (приводящий к большому количеству пропущенных указателей или несвоевременному реагированию на них) может давать такое же значение mdev, что и простой визуальный интерфейс "человек - машина", расположенный далеко от нормальной зоны прямой видимости, но для других целей. В основном, несмотря на то что mdev представляет собой общий показатель различий выполнения двух задач, одного показателя mdev может быть недостаточно для обоснования различий между двумя второстепенными задачами с одинаковыми значениями mdev. Для определения степени влияния различных вариантов интерфейса "человек - машина" на результативность выполнения основной задачи целесообразно рассмотреть дополнительно чувствительность показателей к установленным воздействиям. Ниже приведены показатели, которые могут быть использованы в качестве дополнительных параметров к показателю mdev.
Первый показатель, модифицированное стандартное отклонение бокового положения, может быть использован для количественной оценки влияния на результативность управления. Второй показатель, доля пропущенных или ошибочных смен полосы движения, применяют в случаях, когда водитель пропустил указатели или неправильно отреагировал на них (например, выполнил перестроение на ошибочную полосу). Третий показатель, средняя задержка начала смены полосы движения, может быть использован для оценки позднего обнаружения указателей. Первый показатель в основном вычисляют для оценки визуально-мануальных требований, а последние два показателя применяют для оценки когнитивно-звуковых требований [15]. Более подробно эти показатели рассмотрены ниже.
Модифицированное стандартное отклонение бокового положения (SDLP)
Этот показатель представляет собой высокочастотное отклонение бокового положения транспортного средства от заданного курса, в результате чего снижается результативность управления транспортным средством, при этом пренебрегают низкочастотным отклонением, связанным со сменой полосы движения. Показатель отражает величину "отклонения" в конце смены полосы движения и соответствие целевой полосе движения. Этот показатель вычисляют, применяя фильтр высоких частот к сигналу бокового положения транспортного средства относительно заданного курса, но данный способ имеет погрешности, так как смена полосы движения также включает некоторые высокочастотные составляющие. Однако эмпирические результаты показали, что данный показатель эффективно разделяет влияние среднечастотных отклонений на результативность управления от низкочастотных воздействий, относящихся к обнаружению указателей [15].
Показатель определяют как стандартное отклонение сигнала бокового положения транспортного средства относительно заданного курса, отфильтрованного по частоте выше 0,1 Гц. Единица измерения - метр. Вычисление показателя состоит из следующих этапов:
- отфильтровать сигнал бокового положения транспортного средства относительно заданного курса с помощью фильтра Баттерворта второго порядка с частотой среза 0,1 Гц. Сигнал бокового положения транспортного средства определяет боковое положение относительно осевой линии полосы движения (а не относительно траектории базовой модели);
- вычислить стандартное отклонение полученного отфильтрованного сигнала бокового положения транспортного средства относительно заданного курса.
Доля пропущенной или неправильной смены полосы движения
Этот показатель определяют как долю всех требуемых смен полосы движения, где либо (1) участник не отреагировал на указатель смены полосы движения, либо (2) он выполнил смену полосы движения, но не на указанную полосу. Этот показатель вычисляют с помощью следующего метода.
Геометрия, используемая в качестве основы для вычисления, представлена на рисунке F.1. Траекторию движения транспортного средства анализируют на участке между 40 и 140 м после указателя. На этом участке определены три "блока", представляющие собой три целевых участка для смены полосы движения. Эти блоки расположены по центру каждой из трех полос движения. При добавлении четырех участков рядом с блоками дорога может быть разделена на семь зон, как показано на рисунке F.1.
Если участник попадает в любую из целевых зон (2, 4 или 6) после смены полосы движения, то участок, на котором была затрачена большая часть времени, определяют как выбранную полосу движения (в редких случаях, когда одно и то же время участник находится в двух целевых зонах, невозможно установить выбранную полосу движения). Если выбранная полоса движения не соответствует целевой полосе движения (то есть полосе, обозначенной на указателе) или если ни одна из целевых зон (2, 4 или 6) не была достигнута, смену полосы движения считают выполненной неверно. Итоговое значение получают путем деления количества неправильно выполненных смен полосы движения на общее количество указателей.
Для экспериментов блочного типа долю пропущенных или неправильно выполненных смен полосы движения вычисляют для всего пути. Однако при проведении экспериментов смешанного типа каждая смена полосы движения должна быть связана с требованием эксперимента (например, с определенной второстепенной задачей). Основной принцип данного сопоставления состоит в том, что смена полосы движения должна соответствовать требованию, которое было установлено в момент появления указателя для этой смены полосы движения.
Следует отметить, что теоретически можно также различать доли пропущенных и неправильно выполненных смен полосы движения. Однако это добавляет определенную сложность в вычислении, поскольку необходимо учитывать, где субъект находился до начала текущей смены полосы движения.
|
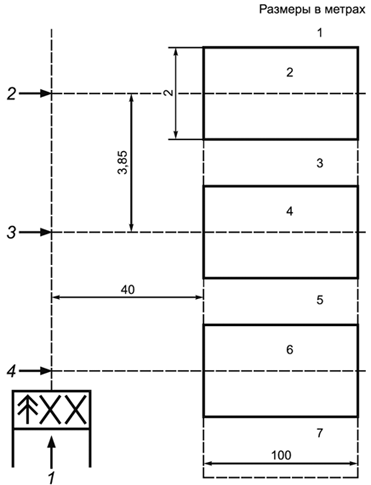
1 - положение указателя; 2 - левая полоса движения; 3 - центральная полоса движения; 4 - правая полоса движения
Рисунок F.1 - Геометрия целевых зон, используемая для вычисления доли пропущенных или неправильно выполненных смен полосы движения
Средняя задержка начала смены полосы движения
Этот показатель определяют как время (в секундах), прошедшее от момента появления указателя (то есть 40 м до указателя) до начала смены полосы движения. Данный показатель применяют только к правильно выполненным сменам полосы движения, которые определены методом, описанным в предыдущем разделе.
Точку начала смены полосы движения определяют по значимым действиям по изменению направления движения в направлении к новой полосе движения, которую идентифицируют с помощью следующего метода, состоящего из трех этапов:
a) Определение изменения траектории движения транспортного средства
Изменение траектории движения транспортного средства определяют на основе производной ![]() от сигнала бокового положения
от сигнала бокового положения транспортного средства, где
- продольное положение транспортного средства вдоль трека. Сигнал бокового положения транспортного средства и (при необходимости) производная должны быть отфильтрованы по низким частотам в зависимости от разрешения сигнала. Исходя из этого, определяют продольное положение
, соответствующее максимальному абсолютному значению производной от 30 м до указателя до 30 м после указателя (
). Затем определяют продольное положение
, представляющее собой точку, в которой сигнал впервые достигает 30% от
. Эта точка представляет собой первое приближение точки начала смены полосы движения.
b) Определение действий по изменению направления движения
На втором этапе определяют возможные действия по изменению направления движения, соответствующие изменению траектории движения, выявленному на этапе а). Эти действия устанавливают в "зоне поиска", начиная с 60 м до указателя и заканчивая в положении , вычисленном выше. Действия по изменению направления движения должны быть:
1) выполнены в соответствии с правильным направлением (определение изменения траектории движения приведено в перечислении а);
2) связаны с углом поворота рулевого колеса более чем на 2° и менее чем на 5° в абсолютном значении.
Если действия по изменению направления движения соответствуют данным критериям и выполнены в зоне поиска, положение , соответствующее минимальному/максимальному углу поворота рулевого колеса, представляющее собой начало действий по изменению направления движения, определяют как точку начала смены полосы движения. Если действиям по изменению направления движения предшествует фаза плато, должно быть выбрано значение
, которое соответствует последнему значению фазы плато.
c) Вычисление средней задержки начала смены полосы движения
Задержку начала смены полосы движения вычисляют как время с момента появления указателя смены полосы движения до начала смены полосы движения, определенного на основе действий по изменению направления движения, превышающих пороговое значение. Конечное значение является средней задержкой для конкретных экспериментальных условий (например, определенной второстепенной задачи). При проведении экспериментов смешанного типа взаимосвязь между сменами полосы движения и условиями эксперимента должна осуществляться по тем же принципам, что и при вычислении доли пропущенных или ошибочно выполненных смен полосы движения (приведенном выше).
F.4 Перспективы разработки
В дальнейшем может быть полезна разработка показателя, который объединяет снижение результативности выполнения как испытаний в целом, так и второстепенной задачи в единый показатель. Тем не менее до настоящего времени данный показатель не был разработан.
Приложение G
(справочное)
Первоначальная валидация испытаний на смену полосы движения
Первоначальная разработка испытаний на смену полосы движения в рамках проекта ADAM (Daimler и BMW, Германия, 2002-2004) была основана на следующих двух подходах по проверке их валидности (см. [11] и [17]):
_______________
ADAM (Advanced Driver Attention Metrics) - показатели уровня внимания водителя.
- корреляция с критерием (например, по данным эксплуатации);
- испытания на выполнения второстепенных задач в порядке сложности.
На основе корреляционного подхода было протестировано восемь второстепенных задач, выполненных при использовании тренажера и в реальных условиях (на оборудованном автомобиле на дорогах в Германии). Это были следующие задачи: использовать навигационный справочник интегрированной навигационной системы, навигационную карту, отрегулировать звук, ввести номер телефона, заменить кассету, выбрать конфеты по цвету, развернуть жевательную резинку и прочитать расписание поездов (на бумажном носителе). В исследованиях в условиях эксплуатации принимали участие 30 человек (15 мужчин, 15 женщин, средний возраст - 54 года), все участники выполняли второстепенные задачи в процессе управления транспортным средством по дороге с умеренным движением. Были зафиксированы данные управления транспортным средством, а также дополнительные показатели (данные поведения участников и направленность их взгляда). В лабораторных условиях были исследованы те же второстепенные задачи, при участии 30 человек (24 мужчины, 6 женщин, средний возраст - 51,6 года). На рисунке G.1 представлены результаты испытаний на смену полосы движения и стандартное отклонение направления движения, полученное в процессе исследований, проводимых в условиях эксплуатации. Значения были стандартизированы для облегчения сравнения (z-преобразование) и получен коэффициент корреляции =0,715.
Второй подход для проверки валидности испытаний на смену полосы движения заключался в исследовании второстепенных задач в порядке сложности. Одним из недостатков корреляционного подхода является то, что порядок выполнения второстепенных задач с учетом степени их сложности остается неясным, хотя испытания, проводимые в условиях эксплуатации, иногда называют "истинным" критерием. Другим недостатком этого подхода считают необходимость повторять выполнение второстепенных задач в различных условиях (на дороге и в лаборатории). Поэтому далее исследовали пары второстепенных задач с известным порядком сложности. В основном при выполнении пары визуальных задач участникам необходимо исследовать множество символов для определения целевого символа. В простых условиях целевой символ был единственным в данном цвете, а в сложных условиях были и другие символы того же цвета. В первом случае цвет был назван единственным критерием поиска, тогда как в другом случае цвет представляет собой критерий конъюнктивного поиска [20]. Установлено, что выполнение задачи по критерию конъюнктивного поиска требует больше внимания и времени, задача является более сложной, чем ее выполнение с единственным критерием поиска. Таким образом, в исследованиях в моделируемых условиях, в отличие от реальных условий, ожидаемый результат известен заранее и проведение дополнительных испытаний (например, при использовании тренажера или в реальных условиях) не требуется. Выполнение двух когнитивных задач в данном исследовании заключалось в расчете двух шагов наперед (простой уровень задачи) и семи шагов назад (сложный уровень). А при выполнении моторных или тактильных задач участники должны были вставить маленькую деревянную палочку в доску с отверстиями по краю без визуального контроля. В простых условиях отверстия были больше, а конец палочки был круглым, тогда как в сложных условиях отверстия были меньше и палочка была с острыми краями. Значения mdev, полученные в процессе LCT, были совершенно различны для задач визуального поиска и когнитивного анализа, в отличие от моторных задач. Эти исследования показали, что в испытаниях на смену полосы движения в основном можно дифференцировать второстепенные задачи в соответствии с их визуальными или когнитивными требованиями.
До начала проведения исследований по валидности испытаний на смену полосы движения в проекте ADAM рассмотрено 12 второстепенных задач. В исследовании приняли участие 85 человек, при использовании высокотехнологичного тренажера с углом обзора 360° и усовершенствованной системой движения. В качестве критерия для 12 задач был использован объединенный показатель, вычисленный на основе показателей продольного и поперечного управления, движения глаз и субъективных оценок. Коэффициент корреляции по результатам выполнения 12 задач составил =0,835. При использовании только объективных данных, полученных в испытаниях на тренажере без субъективных оценок, коэффициент корреляции составил
=0,754.
В дальнейшем полезно исследовать валидность испытаний на смену полосы движения более детально.
|
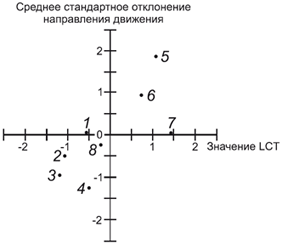
1 - выбор конфеты по цвету; 2 - использование навигационной карты; 3 - регулировка звука; 4 - изучение расписания поездов; 5 - замена кассеты; 6 - разворачивание жевательной резинки; 7 - ввод номера телефона; 8 - использование навигационного справочника
Примечание - =0,715;
=0,046 (Пирсон).
Рисунок G.1 - Корреляция результатов LCT, проводимых в лабораторных условиях, со стандартным отклонением направления движения, полученным в процессе исследований в условиях эксплуатации
Библиография
[1] | ISO/TS 14198 | Road vehicles - Ergonomic aspects of transport information and control systems - Calibration tasks for methods which assess driver demand due to the use of in-vehicle systems |
[2] | ISO 15005 | Road vehicles - Ergonomic aspects of transport information and control systems - Dialogue management principles and compliance procedures |
[3] | ISO 15007-1 | Road vehicles - Measurement of driver visual behaviour with respect to transport information and control systems - Part 1: Definitions and parameters |
[4] | ISO 15007-2 | Road vehicles - Measurement of driver visual behaviour with respect to transport information and control systems - Part 2: Equipment and procedures |
[5] | ISO 15008 | Road vehicles - Ergonomic aspects of transport information and control systems - Specifications and compliance procedures for in-vehicle visual presentation |
[6] | ISO 15006 | Road vehicles - Ergonomic aspects of transport information and control systems - Specifications and compliance procedures for in-vehicle auditory presentation |
[7] | SAE J1050 | Describing and Measuring the Drivers Field of View |
[8] | SAE J287 | Driver Hand Control Reach |
[9] | ANGELL L., AUFLICK J., AUSTRIA P.A., KOCHLAR D., TIJERINA L., BIEVER W., DIPTMAN J., HOGSETT J. and KIGER S. Driver Workload Metrics: Task 2 Final Report. CAMP project, US Department of Transportation. Report No. DOT HS 810 635, 2006 | |
[10] | BENEDICT D., ANGELL L.S. and DIPTIMAN T. Exploration of the Lane Change Test. Presented to the Driver Metrics Workshop, Ottawa, Canada, October 3, 2006 | |
[11] | BREUER J., BENGLER K., HEINRICH C. and REICHELT W. Development of driver attention metrics (ADAM). In H.STRASSER, H.RAUSCH and H BUBB (Eds.), Quality of work and products in enterprises of the future. Ergonomia, Stuttgart, 2003, pp.37-40 | |
[12] | BRUYAS M.P., BRUSQUE C., TATTEGRAIN H., AURIAULT A., AILLERIE I. and DURAZ M. Consistency and sensitivity of Lane Change Test according to driving simulator characteristics, IET Intelligent Transport Systems Journal, 2008, 2(4), pp.306-314 | |
[13] | BURNS P., HARBLUK J., TRBOVICH P. and LOCHNER M. Evaluating Tasks with the LCT. Presentation at the Driver Metrics Workshop, Ottawa, October 3, 2006 | |
[14] | COHEN J. Statistical power analysis for the behavioural sciences. Hillsdale, New York, Erlbaum, 1998 | |
[15] |
| |
[16] | KAHNEMAN D. Attention and effort, Prentice-Hall, Englewood Cliffs, NJ, 1973 | |
[17] | MATTES S. The lane-change-task as a tool for driver distraction evaluation., In H.STRASSER, K.KLUTH, H.RAUSCH and H.BUBB (Eds.). Quality of work and products in enterprises of the future. Ergonomia, Stuttgart, 2003, 57 | |
[18] | MATTES S., | |
[19] |
| |
[20] | TREISMAN A. and GELADE G. A feature integration theory of attention. Cognitive Psychology, 12, 1980, pp.97-136 | |
[21] | YOUNG K.L., REGAN M.A. & HAMMER M. Driver distraction: a review of the literature. Monash University, Accident Research Center, Australia. Technical report #206, 2003 | |
УДК 331.433:006.354 | ОКС 13.180 |
Ключевые слова: эргономика, транспортное средство, информационно-управляющая система, испытания на смену полосы движения, планирование, процедура, анализ данных | |
Электронный текст документа
и сверен по:
, 2019
{kind=link}