ГОСТ Р МЭК 61391-2-2012
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственная система обеспечения единства измерений
ОБОРУДОВАНИЕ МЕДИЦИНСКОЕ УЛЬТРАЗВУКОВОЕ ДИАГНОСТИЧЕСКОЕ
Общие требования к методикам измерения максимальной глубины зондирования и динамического диапазона
State system for ensuring the uniformity of measurements. Medical ultrasonic diagnostic equipment. General requirements to methods for measurement of maximum depth of penetration and local dynamic range
ОКС 17.140.50
Дата введения 2014-01-01
Предисловие
1 ПОДГОТОВЛЕН Всероссийским научно-исследовательским институтом физико-технических и радиотехнических измерений (ВНИИФТРИ) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Управлением метрологии Федерального агентства по техническому регулированию и метрологии
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 29 ноября 2012 г. N 1453-ст
4 Настоящий стандарт идентичен международному стандарту МЭК 61391-2-2010* "Ультразвук. Эхо-импульсные сканеры. Часть 2. Измерение максимальной глубины зондирования и локального динамического диапазона" (IEC 61391-2-2010 "Ultrasonics - Pulse-echo scanners - Part 2: Measurement of maximum depth of penetration and local dynamic range", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОС Р 1.5-2004* (пункт 3.5).
________________
* Вероятно, ошибка оригинала. Следует читать ГОСТ Р 1.5-2004. - .
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
6 ПЕРЕИЗДАНИЕ. Март 2019 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
1 Область применения
В настоящем стандарте определены термины и специальные методы измерений максимальной глубины зондирования и локального динамического диапазона ультразвуковых сканеров, работающих в В-режиме реального времени и использующих преобразователи следующих типов:
- датчики механического сканирования;
- электронные фазированные решетки;
- линейные решетки;
- криволинейные решетки;
- двухмерные решетки;
- решетки трехмерного изображения, основанные на сочетании перечисленных выше датчиков.
Все рассматриваемые в настоящем стандарте сканеры работают в эхо-импульсном режиме. Методы испытаний применимы к преобразователям, работающим в частотном диапазоне от 1 до 15 МГц как на основной частоте, так и на ее гармониках, которые могут превышать 15 МГц. Однако испытания сканеров с гармоническими составляющими выше 15 МГц в настоящем стандарте не рассматривают.
Примечание - Тем не менее стандарт поддерживает тех изготовителей тест-объектов (фантомов), которые стремятся расширить частотный диапазон испытаний сканеров в сторону верхних частот.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие международные стандарты.
IEC 60050-801:1994, International Electrotechnical Vocabulary (IEV) - Chapter 801: Acoustics and electroacoustics (Международный электротехнический словарь - Глава 801. Акустика и электроакустика)
IEC 60050-881:1983, International Electrotechnical Vocabulary (IEV) - Chapter 881: Radiology and radiological physics (Международный электротехнический словарь - Глава 881. Радиология и физика радиологии)
IEC 60601-1:2005, Medical electrical equipment - Part 1: General requirements for basic safety and essential performance (Изделия медицинские электрические - Часть 1. Общие требования к безопасности и основным техническим характеристикам)
IEC 61161:2006*, Ultrasonics - Power measurement - Radiation force balances and performance requirements (Ультразвук - Измерение мощности - Системы уравновешивания радиационной силы и требования к исполнению)
________________
* Заменен на IEC 61161:2013.
IEC 61391-1:2006, Ultrasonics - Pulse-echo scanners - Part 1: Techniques for calibrating spatial measurement systems and measurement of system point spread function response (Ультразвук - Эхо-импульсные сканеры - Часть 1. Методы калибровки систем пространственных измерений и измерений функции размывания точки)
IEC 62127-1:2007, Ultrasonics - Hydrophones - Part 1: Measurements and characterization of medical ultrasonic fields up to 40 MHz (Ультразвук - Гидрофоны - Часть 1. Измерения и описание медицинских ультразвуковых полей на частотах до 40 МГц)
3 Термины и определения
В настоящем стандарте использованы следующие термины с соответствующими определениями:
3.1 сканирование типа A (A-scan): Одномерное представление данных, в котором информация о величине отраженных сигналов отображается в виде амплитуд сигналов, расположенных по оси ультразвукового пучка, представляемой как ось времени распространения сигнала или расстояния.
[См. МЭК 61391-1]
3.2 линия акустического сканирования, линия сканирования (scan line): Одна из линий сканирования, формирующих изображение в В-режиме на мониторе ультразвукового сканера. Каждая из них является огибающей линий сканирования типа А, в которой амплитуды эхосигнала преобразованы в значения яркости.
[См. МЭК 61391-1]
3.3 частота акустического воздействия, Гц (acoustic working frequency): Среднеарифметическое частот и
, амплитуда спектра акустического давления в которых впервые снижается на минус 3 дБ ниже амплитуды главного максимума.
3.4 коэффициент затухания, м (attenuation coefficient): Частичное уменьшение амплитуды плоской волны на единицу длины распространения в среде при ее однократном прохождении на какой-либо определенной частоте.
Примечания
1 Как правило, коэффициент затухания выражают в дБ м путем умножения частичного затухания на коэффициент 8,686.
2 При указании параметров затухания в материале рекомендуется приводить данные по их изменению с частотой. Это может быть выражено в виде , т.е. коэффициента затухания на частоте
, определяемого как
![]() , где
, где выражено в МГц,
- это коэффициент затухания на 1 МГц, а
- постоянная, определяемая по кривой, полученной путем сглаживания экспериментальных данных методом наименьших квадратов.
3 Этот параметр относится только к затуханию в среде; он не связан с потерями на отражение от границ раздела сред и с уменьшением сигнала в результате дифракции.
3.5 В-режим (B-mode): Метод представления информации, при котором амплитуду эхосигналов представляют значением яркости соответствующей точки изображения.
Примечание - Местоположение точки связано со временем прохождения акустического импульса и установленной скоростью звука в ткани; при визуализации в В-режиме оно определяется также относительным положением и ориентацией линии акустического сканирования.
3.6 сканирование типа В (B-scane): Тип геометрического представления данных об отраженных сигналах, в котором информацию образуют из точек, лежащих в плоскости ультразвукового сканирования, озвучиваемой ультразвуковыми пучками.
[См. МЭК 61391-1]
3.7 коэффициент обратного рассеяния, м стер
(backscatter coefficient): Средняя акустическая мощность, рассеянная определенным объектом в направлении 180° к падающему пучку, в единичном пространственном угле и от единичного объема, деленная на интенсивность падающего пучка, на какой-либо определенной частоте; мощность, усредненная по различным пространственным реализациям объемов рассеяния.
Примечание - Если влияние частоты существенно, то частотную зависимость этого коэффициента следует относить к месту, где он используется.
3.8 контрастность рассеивателей (backscatter contrast): Отношение коэффициентов обратного рассеяния от двух различных объектов или областей.
3.9 ось пучка (beam axis): Продольная ось эхо-импульсного отклика на рассматриваемой линии акустического сканирования, эквивалентная оси пучка излучения по МЭК 62127-1.
3.10 оцифрованные данные изображения (digitized image data): Двухмерный набор значений пикселей, полученных из ультразвуковых эхосигналов, формирующих ультразвуковое изображение.
3.11 показываемый на экране динамический диапазон, дБ (displayed acoustic dynamic range): 20 отношения амплитуды максимального эхосигнала, который не насыщает изображение, к амплитуде минимального эхосигнала, который можно различить в том же или аналогичном месте изображения на сканере, настроенном в режим испытаний.
Примечание - Для большинства сканеров, работающих в В-режиме, сжатие эхосигнала осуществляется в приемном тракте так, что показанный на экране динамический диапазон превышает динамический диапазон монитора.
3.12 порог изображения (в В-режиме) (display threshold (B-mode)): Яркость изображения, лишь немного превышающая яркость при отсутствии эхосигналов.
3.13 насыщение изображения (в В-режиме) (display saturation (B-mode)): Яркость изображения, при которой увеличение уровня эхосигнала или увеличение чувствительности системы не вызывает изменения яркости.
3.14 динамический диапазон (dynamic range): См. локальный динамический диапазон (local dynamic range); см. также показываемый на экране динамический диапазон (displayed dynamic range) и глобальный динамический диапазон (global dynamic range).
3.15 обзорное поле (поле обзора) (field-of-view): Площадь в плоскости ультразвукового сканирования, с которой собирают ультразвуковую информацию для получения одного кадра изображения.
Примечания
1 Эта площадь может соответствовать как двухмерному, так и трехмерному полю.
2 Это определение отличается от данного в МЭК 61391-1 тем, что оно ограничено областью, с которой собирается информация.
3.16 частота кадров (frame rate): Число разверток, соответствующее скорости смены кадров, определяемое скоростью сканирования ультразвуковым пучком всего обзорного поля.
[См. МЭК 61391-1]
Примечание - Этот параметр, как правило, зависит от частоты смены кадра на мониторе сканера.
3.17 усиление, дБ (gain): Выражаемое в децибелах отношение выходного сигнала системы, обычно усилительной, к входному.
[См. МЭК 61391-1]
Примечание - Это отношение применимо только в случае постоянной и известной мощности акустической системы.
3.18 глобальный динамический диапазон (global dynamic range): Отношение максимальной и минимальной амплитуд эхосигналов, которые может обработать сканер без искажений выходного сигнала, включая возможность регулирования органов управления.
3.19 изображение на гармониках (harmonic imaging): Метод визуализации, при котором ультразвук излучают на основной частоте, а принимают на ее гармонических составляющих.
Примечание - Гармоники образуются в среде распространения или при нелинейных отражениях. Сигналы гармоник образуют изображение или его часть.
3.20 локальный динамический диапазон, дБ (local dynamic range): 20lg отношения минимальной амплитуды эхосигнала, который соответствует максимальному уровню серой шкалы в оцифрованном изображении, к эхосигналу, который соответствует самому низкому уровню серого в том же месте экрана монитора и при тех же установках сканера.
Примечания
1 Для 8-битовой памяти изображения максимальный уровень серой шкалы цифрового изображения будет равен 255.
2 В некоторых документах под локальным динамическим диапазоном подразумевают диапазон эхосигналов, требуемый для изменения яркости от едва различимой до максимальной в данном месте [см. МЭК 60601-1]. Однако определение, приведенное в настоящем стандарте, лучше подходит для оценки оцифрованных изображений, чем данных, полученных визуально по экрану монитора. Термин "показываемый на экране динамический диапазон" эквивалентен термину "локальный динамический диапазон" только в смысле значений, индицируемых на мониторе.
3 На эту величину оказывает влияние функция передачи серой шкалы, связанная с изображением эхосигналов.
3.21 максимальная глубина зондирования, м (maximum depth of penetration): Максимальное расстояние в тканеимитирующем фантоме с какими-либо оговоренными параметрами, для которого отношение оцифрованных данных изображения рассеивателей в В-режиме к оцифрованным данным изображения в этом же режиме, соответствующего шумам электронного происхождения, равно 1,4.
Примечание - Изображения фантома и шумов должны быть получены при одних и тех же установках сканера.
3.22 условия работы (operating condition): Какой-либо один из возможных наборов регулировок сканера при его работе в дискретном или комбинированном режиме.
3.23 режим работы (дискретный) [operating mode - (discrete)]: Один из режимов работы системы, при котором ультразвуковой преобразователь или группу элементов ультразвукового преобразователя возбуждают для реализации только одного метода визуализации.
[См. МЭК 62127-1]
Примечание - Примерами дискретных режимов работы являются: А-режим (А); М-режим (М); статическое сканирование в В-режиме (sB); сканирование в В-режиме в реальном времени (В); непрерывно-волновой доплер (cwD); импульсный доплер (D); статическое картирование кровотока (sD); картирование кровотока в реальном времени (rD), обычно использующие только один тип акустических импульсов на заданной глубине.
3.24 режим работы (комбинированный) [operating mode - (combined)]: Какая-либо комбинация дискретных режимов работы.
[См. МЭК 62127-1]
3.25 идеальный плоский (зеркальный) отражатель (perfect planar (or specular) reflector): Поверхность с коэффициентом отражения, равным 1,0, размеры которой существенно больше ширины ультразвукового пучка в месте нахождения отражателя.
Примечания
1 Коэффициент отражения (по давлению) поверхности раздела вода-воздух равен 0,9994 (вычислен из ![]() 1480000 кг м
1480000 кг м с
и
![]() 413 кг
413 кг с
).
2 На практике измерения можно проводить с различными мишенями. Их отражательную способность определяют сравнением с идеальным отражателем.
3.26 фантом (phantom): Объем материала, обладающий теми же свойствами, что и ткань таких же размеров, с соответствующими параметрами поглощения и рассеяния ультразвука, и используемый для дозиметрии или оценки качества изображения при ультразвуковой диагностике (см. тканеимитирующий фантом).
[См. МЭК 60050-881]
3.27 эхо-импульсный метод (pulse-echo technique): Метод сбора информации с определенной области путем ее облучения импульсными ультразвуковыми пучками, приема и отображения эхосигналов от рассеивателей или отражателей.
3.28 коэффициент отражения (звукового давления) (reflection coefficient (sound pressure)): Отношение амплитуд отраженной и падающей плоской волны при ее падении перпендикулярно к границе раздела двух сред.
3.29 линия сканирования (scan line): См. линия акустического сканирования.
3.30 плоскость сканирования (scan plane): Плоскость получаемого изображения, содержащая линии акустического сканирования.
3.31 объем сканирования (scan volume): Объем, с которого получают эхосигналы для формирования трехмерного изображения.
3.32 чувствительность (sensitivity): Минимальный коэффициент отражения плоского отражателя в воде, ориентированного так, чтобы получить максимальный отраженный сигнал, соответствующий порогу изображения.
Примечание - В настоящем стандарте для оценки чувствительности используют максимальную глубину зондирования при визуализации эхосигналов от материала фантома.
3.33 удельный коэффициент затухания, дБ м МГц
(specific attenuation coefficient): Наклон графической зависимости коэффициента затухания от частоты.
3.34 спекл-структура (speckle pattern): Пятнистое изображение, вызванное интерференцией сигналов, отраженных рассеивающими центрами в теле или тканеимитирующем материале.
[См. МЭК 61391-1]
3.35 статистически независимые изображения (statistically independent images): Изображения, формируемые от плоскостей или направлений таким образом, чтобы нормированная взаимная корреляция спекл-структур выбранной области, предшествующая их уменьшению, была меньше 0,2.
Примечание - Статистически независимые изображения получают на фантоме, содержащем случайно распределенные рассеиватели, при перемещении плоскости сканирования, ультразвукового пучка и т.п. так, чтобы изменения спекл-структуры существенно уменьшили их корреляцию. Взаимная корреляция меньше 0,2 необходима для выполнения независимых измерений, рассматриваемых в настоящем стандарте.
3.36 тест-объект (test object): Устройство, содержащее одну или несколько групп объектов заданной конфигурации, внедренных в тканеимитирующий материал или другую среду (см. также фантом, тканеимитирующий фантом).
[См. МЭК 61391-1]
3.37 тканеимитирующий материал (tissue-mimicking material): Материал, для которого скорость распространения (скорость звука), характеристики отражения, рассеяния и затухания эквивалентны характеристикам мягких тканей в диапазоне ультразвуковых частот от 0,5 до 15 МГц.
3.38 тканеимитирующий фантом (tissue-mimicking phantom): Объект, содержащий тканеимитирующий материал.
4 Общие требования
Предоставляемые изготовителем технические данные должны обеспечивать возможность их сравнения с результатами, полученными при испытаниях, регламентированных в настоящем стандарте.
5 Условия окружающей среды
Все испытания необходимо проводить при следующих условиях окружающей среды:
- температура | (23±3)°С; |
- относительная влажность | от 45% до 75%; |
- атмосферное давление | от 86 до 106 кПа. |
Известно, что такие характеристики ультразвуковых фантомов, как скорость звука и коэффициент затухания, изменяются с температурой. Для того чтобы оценить, соответствуют ли указанные выше условия окружающей среды акустическим характеристикам, следует воспользоваться информацией фирмы-изготовителя фантома. Если такого соответствия нет, то условия окружающей среды следует изменить под используемый тест-объект или фантом.
6 Требуемое оборудование и данные
6.1 Общие положения
Изложенные в настоящем стандарте процедуры проведения испытаний следует выполнять с помощью тканеимитирующих фантомов и электронного испытательного оборудования с использованием данных оцифрованного изображения, полученных с испытуемого ультразвукового сканера.
6.2 Фантомы
6.2.1 Требования к фантомам
Для выполнения измерений в соответствии с настоящим стандартом необходим ультразвуковой фантом. Для определения максимальной глубины зондирования требуется фантом, содержащий большую однородную область шириной, соответствующей не менее чем 1/3 ширины изображаемого пространства, если глубина зондирования установлена на 20 см или на максимальное значение, меньшее 20 см. Акустические свойства такого фантома указаны в 6.2.2.
Испытательное оборудование для измерений локального динамического диапазона рассмотрено в 6.3. Однако пользователь может, если не измерить, то оценить локальный динамический диапазон. Характеристики фантомов, которые можно использовать для такой оценки, приведены в 6.2.3.
6.2.2 Фантом для измерения максимальной глубины зондирования
Максимальную глубину зондирования определяют как максимальный диапазон, в котором эхосигналы от самых слабых рассеивателей в фантоме с определенными характеристиками могут быть выявлены при заданном превышении шумового фона, как это установлено в [1]-[8]. Фантом для измерения максимальной глубины зондирования показан на рисунке А.1 приложения А. Существенной частью такого фантома является блок из тканеимитирующего материала с фоновым рассеянием, увеличивающим эхосигналы. Тканеимитирующий материал должен иметь следующие характеристики:
- скорость звука - (1540±15) мс на 3 МГц;
- плотность - (1,00±0,03) г/см;
- удельный коэффициент затухания - (0,7±0,05) дБ см МГц
в частотном диапазоне от 1 до 15 МГц;
- коэффициент обратного рассеяния - (3·10 см
ср
) ±3 дБ на 3 МГц; с частотной зависимостью в виде
, где 2
4 на частотах от 1 до 15 МГц. Значение коэффициента обратного рассеяния в фантоме следует указывать совместно с результатами испытаний, проведенных с помощью фантома, в виде функции от частоты;
- размеры: Для проверки глубины обзора на частотах ниже 5 МГц фантом должен обеспечивать однородность рассеяния и затухания на глубинах по меньшей мере до 20 см. Размеры однородного материала в поперечных пучку направлениях (вдоль ширины и толщины пучка) должны быть не менее 6 см на расстоянии, соответствующем максимальной глубине зондирования испытуемых сканера и преобразователя. Для испытаний систем трехмерной визуализации могут потребоваться и ![]() поперечные размеры однородной области.
поперечные размеры однородной области.
Подходящими для измерения максимальной глубины зондирования могут быть фантомы на основе водных гелей с микроскопическими неоднородностями, равномерно распределенными по объему так, чтобы обеспечить требуемый уровень затухания [9]-[14]. Такие фантомы должны также содержать твердые частицы, такие, например, как стеклянные шарики (со сквозным отверстием) диаметром 40 мкм, которые дают сигналы обратного рассеяния контролируемой амплитуды [14], [15]. Многие изготовители [например, ATS Labs, Bridgeport, СТ, USA (www.atslabs.com), CIPS, Norfolk, VA, USA (www.cirsinc.com), Gammex/RMI, Middleton, Wl, USA (www.qammex.com)] производят тканеимитирующие материалы и фантомы, соответствующие этим требованиям.
6.2.3 Фантомы для оценки локального динамического диапазона
Оценку локального динамического диапазона можно выполнить достаточно просто в клинических условиях при сканировании фантома, содержащего сферические или цилиндрические объекты, коэффициенты обратного рассеяния которых отличаются от основного материала на известное значение [16]. В некоторых коммерчески доступных фантомах коэффициенты обратного рассеяния этих объектов варьируются в диапазоне до 24 дБ (на 15 дБ больше, чем у основного материала, и на 9 дБ меньше).
6.3 Испытательное оборудование для измерения локального динамического диапазона
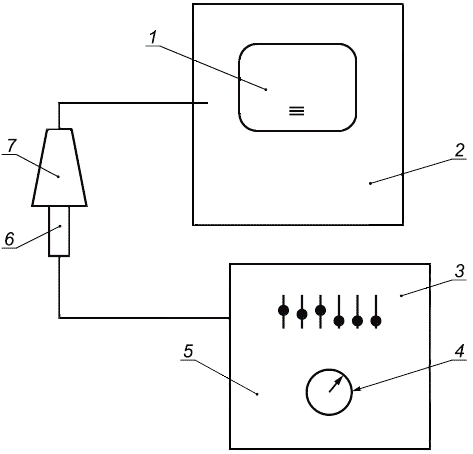
Наиболее удобным методом измерения локального динамического диапазона является прямое облучение преобразователя испытуемой системы внешним акустическим сигналом, амплитуду импульсов которого можно регулировать достаточно точно, как это показано в [17]-[20]. Пример схемы такой установки приведен на рисунке 1. Для измерений необходим генератор синусоидальных сигналов (например, модели 33220А фирмы Agilent Technologies, Santa Clara, CA, USA), работающий в диапазоне частот, соответствующем испытуемому сканеру. Для излучения акустического сигнала используют преобразователь (излучатель) с плоским одиночным активным элементом, акустически присоединяемый к преобразователю сканера. Диаметр излучателя должен быть меньше 1/3 апертуры преобразователя сканера. Для определения зависимости мощности излучателя от напряжения его возбуждения рекомендуется провести специальные испытания, используя, например, методы, регламентируемые в МЭК 61161. Излучатель возбуждают синусоидальным сигналом от генератора. Акустическая мощность преобразователя должна быть пропорциональна квадрату напряжения возбуждения (с отклонением на более 2 дБ) при уровнях излучаемого им сигнала, соответствующих локальному динамическому диапазону испытуемого сканера.
|

1 - изображение сигнала в В-режиме; 2 - ультразвуковой сканер; 3 - генератор сигналов; 4 - аттенюатор; 5 - датчик сканера; 6 - излучатель
Рисунок 1 - Схема установки для измерения локального динамического диапазона с использованием внешнего акустического сигнала
Между генератором и излучателем подключают внешний электрический аттенюатор. Однако некоторые генераторы имеют встроенный аттенюатор. Рекомендуется, чтобы динамический диапазон аттенюатора был не менее 100 дБ в частотном диапазоне от 1 до 15 МГц.
Может быть использована и другая установка со специально разработанным генератором тональных импульсов [17] (рисунок 2). В этой установке каждый акустический импульс, излучаемый преобразователем (датчиком) сканера, принимают другим преобразователем, находящимся в акустическом контакте с датчиком, а электрический сигнал с этого дополнительного преобразователя подают на генератор тональных импульсов. Генератор выдает один или несколько электрических импульсов с задержкой во времени, устанавливаемой пользователем и зависящей от размера обзорного поля сканера, значения которой, как правило, составляют от 10 до 100 мкс. Электрические импульсы поступают на дополнительный преобразователь, который и передает серию акустических импульсов преобразователю (датчику) сканера. После обработки сигнала и изображения в ультразвуковом сканере эти импульсы представляют на экране монитора в виде эхосигналов в В-режиме и записывают в память сканера. Положение эхосигналов на экране зависит от времени задержки серии импульсов в генераторе и от площади апертуры преобразователя сканера, находящейся в контакте с дополнительным преобразователем. Диапазон изменения уровня выходного сигнала генератора должен превышать локальный динамический диапазон испытуемого сканера.
Третьим возможным методом измерения локального динамического диапазона является воздействие тестового сигнала непосредственно на испытуемый сканер. В этом случае электрические сигналы с известными амплитудой, частотой и длительностью поступают в усилительную систему, минуя преобразователь. В систему можно подать имитирующие эхосигналы, амплитуды которых регулируют с высокой точностью, а затем измерить отклик сканера на изменения амплитуды. Этот метод широко используют для испытаний сканеров с одноэлементными преобразователями [18]-[20]. Применим он и для испытаний сканеров с датчиками в виде электронных решеток. См. также 7.2.3 настоящего стандарта.
|
1 - изображение сигнала в В-режиме; 2 - ультразвуковой сканер; 3 - аттенюатор; 4 - задержка импульсов; 5 - генератор тональных импульсов; 6 - излучатель; 7 - датчик сканера
Рисунок 2 - Схема установки для измерения локального динамического диапазона с использованием генератора тональных импульсов
6.4 Данные оцифрованного изображения
Изложенные в настоящем стандарте критерии испытаний применимы к данным оцифрованного изображения, получаемым из испытуемого сканера. Во всех случаях должны быть доступными значения уровней яркости (серой шкалы) во всех пространственных точках изображения. Данные изображения представляют обычно в виде матрицы, состоящей из 300х300 пикселей с разрешением серой шкалы не менее 8 бит (всего 256 уровней).
Сканеры, соответствующие настоящему стандарту, могут быть сгруппированы в зависимости от источника данных оцифрованного изображения. Первая группа включает системы, для которых данные оцифрованного изображения получают непосредственно из сканера или схемы формирования изображения. Для этой группы сканеров данные оцифрованного изображения берут из следующих источников:
Изображения со сканера представляют в формате DICOM (Digital Imaging and Communications in Medicine) [21]. Данные в этом формате применимы для большинства сканеров. Программное обеспечение дает возможность импортировать и открывать изображения, представленные в этом формате.
Файлы цифровых изображений могут быть получены с самого сканера. Этот метод широко использует большинство изготовителей для внутреннего контроля качества выпускаемых ими сканеров и разработки методов обработки изображений. Возможности данного метода часто используют в клиниках для передачи протоколов с изображениями. Кроме того, конструкцией большинства сканеров предусмотрена возможность сохранения файлов с изображениями на отдельных носителях: USB-флэш-картах, лазерных дисках и пр.
Системы архивирования изображений. Для исследования и сохранения ультразвуковых изображений многие диагностические центры используют систему PACS (Picture Archiving and Communication Systems). Изготовители систем PACS обычно предоставляют средства для сбора изображений в несжатом формате, таком, например, как формат TIFF (Tagged Image File Format - файловый формат Тега для изображений) или формат DICOM, потребителям, которые имеют право доступа к данным изображений.
Вторая группа сканеров относится к более простым устройствам, изображение в которых не оцифрованы, а представлены только стандартными видеосигналами. Такие изображения можно сохранить с помощью компьютера и затем проанализировать. Для получения данных оцифрованного изображения с таких сканеров можно использовать видеоплату захвата изображения. Захват видеосигналов должен быть выполнен в точно заданных условиях, чтобы избежать или минимизировать его искажения. Особое внимание и предосторожность необходимо уделить следующим условиям:
Динамический диапазон входного сигнала видеоплаты захвата должен быть настроен на максимальную амплитуду выходного видеосигнала.
Разрешение оцифровки амплитуд (задаваемое в виде пикселей на размер в битах) должно быть лучше, чем разрешение серой шкалы выходного видеосигнала (требуется не менее 8 бит или 256 уровней серого).
Должна быть обеспечена линейность функции преобразования.
Пространственное разрешение (задаваемое в виде размера пикселей) оцифрованного изображения должно быть лучше, чем плотность видеолиний в оригинальном изображении.
Частота ввода кадров видеоплаты обработки изображения должна быть достаточно большой, чтобы обеспечивать сбор данных при их быстром изменении на входе в случае непрерывного изменения поля обзора. Следует учитывать разницу между частотами смены кадров сканирования и кадров видеоизображения.
Чтобы избежать отражений в линии передачи, кабель должен быть согласован по входу и выходу.
В некоторых случаях программное обеспечение обработки входных сигналов в ультразвуковых сканерах дает возможность пользователю определять значения яркости пикселей в выбранной области (ROI - Region Of Interest). Для некоторых видов испытаний, в частности при определении локального динамического диапазона, такой механизм удобен для мониторинга значений яркости пикселей.
Результаты оцифровки изображения должны представлять изображение, показываемое на мониторе сканера. Таким образом, данные изображения, полученные со сканера, не должны подвергаться какой-либо дополнительной обработке до проведения анализа в соответствии с требованиями настоящего стандарта.
7 Методы измерений
Результаты измерений будут зависеть от преобразователя, с которым работает сканер, частоты, условий и режима его работы.
Эти условия должны быть указаны при испытаниях сканера в соответствии с настоящим стандартом и стандартом МЭК 61391-1. При этом максимальную глубину зондирования рекомендуется измерять на каждой частоте.
7.1 Чувствительность системы (сканера): максимальная глубина зондирования
7.1.1 Установки системы сканирования
Для определения максимальной глубины зондирования органы управления чувствительностью системы должны быть установлены так, чтобы обеспечить прием эхосигналов с максимально возможной глубины фантома. Такую регулировку обычно выполняют следующим образом:
a) устанавливают излучаемую энергию (обозначенную, например, как "выходной сигнал", "мощность" и др.) на максимальное значение;
b) устанавливают фокусное расстояние излучаемого пучка в положение, соответствующее предполагаемой глубине зондирования или дальше;
c) уровень общего усиления системы устанавливают достаточно высоким, чтобы на экране монитора были видны сигналы электрических шумов.
Тип обработки сигнала выбирают таким, чтобы логарифмическое сжатие и другие функции предварительной обработки входного сигнала, а также установка параметров изображения, определяемая последующей обработкой, были типовыми для нормального клинического использования сканера. При использовании функции предварительной установки (по умолчанию) в отчете по испытаниям следует указать ее параметры, как и параметры, перечисленные выше.
7.1.2 Получение изображения
Максимальную глубину зондирования определяют по зависимости отношения сигнал/шум с глубиной, где сигнал проявляется в пикселях изображения. Получают изображение фантома на сканере, настройки которого оптимизированы по глубине обзора (рисунок 3А). На экране, как правило, видны эхосигналы обратного рассеяния материала, постепенно исчезающие в электрических шумах. Следует также получить изображение с датчика, не установленного на фантом, при тех же самых установках выходной мощности, усиления и режимов обработки сигнала. Это изображение будет использовано для определения частотно-зависимого уровня электрических шумов датчика, приемного тракта и тракта обработки сигнала. Необходимо предпринять меры, чтобы механическая нагрузка на датчик при его установке на фантом не вызывала дополнительных шумов по сравнению с теми, когда датчик нагружен на воздух. Если это имеет место, то датчик должен излучать не в воздух, а на какую-то искусственную нагрузку, такую, например, как поглощающая резина с акустическим импедансом, эквивалентным импедансу фантома, но которая не является эхогенной до глубин, соответствующих максимальной глубине обзора в фантоме. Это приведет к "истинному" изображению электрического шума, как это показано на рисунке 3В.
|
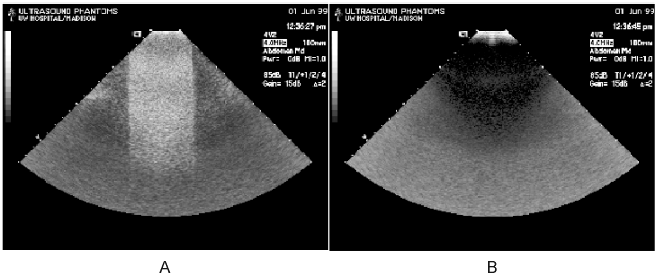
А - изображение однородной части тканеимитирующего фантома; В - изображение электрических шумов после снятия датчика с фантома
Рисунок 3
7.1.3 Анализ
Из данных оцифрованного изображения для выбранной прямоугольной области ROI, простирающейся от ближнего поля до конца изображения, составляют матрицу ![]() , где
, где соответствует номеру столбца, а
- номеру строки в этой матрице. Затем на каждой глубине рассчитывают среднее значение яркости пикселей
. Для секторных датчиков в виде фазированных и криволинейных решеток может оказаться необходимым выбор области ROI (и матрицы) более сложной формы, для которой ширина некоторых строк будет на порядок меньше ширины сектора на максимальной глубине. Среднее значение
должно быть определено по трем или более независимым изображениям, полученным при установке датчика в различные места на фантоме. Подобным же образом следует определить зависимость от глубины средней яркости (уровня серого) пикселей
для изображения, содержащего только электрические шумы.
Типовые зависимости и
от глубины показаны на рисунке 4. Из рисунка видно, что значения
постепенно с ростом глубины сходятся со значениями
. Пусть
будет частотно-зависимым средним уровнем эхосигнала на глубине
в отсутствие электрических шумов. Предполагая, что сигнал и шум не коррелированны и что изображение в В-режиме соответствует уровню эхосигналов, можно показать, что усредненный по глубине сигнал изображения фантома составляет
![]() . (1)
. (1)
Отсюда отношение сигнал/шум ![]() для глубины
для глубины составит
 . (2)
. (2)
|
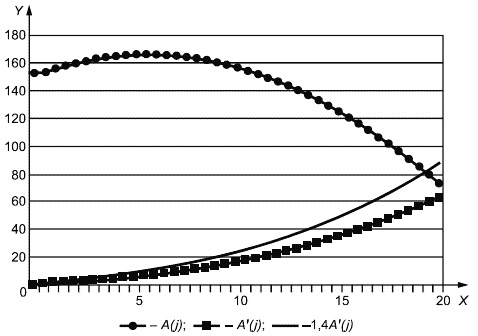
- яркость пикселей в усредненном изображении (в градациях серой шкалы);
- глубина в фантоме, см
Рисунок 4 - Зависимость усредненных значений оцифрованного изображения от глубины для изображения фантома () и изображения шумов (
)
Глубину, на которой отношение сигнал/шум уменьшается до 1, следует считать максимальной глубиной зондирования. Она соответствует отношению ![]() 1,4. В некоторых практических случаях, когда
1,4. В некоторых практических случаях, когда не пропорционально уровню эхосигналов, для определения максимальной глубины зондирования можно пользоваться значением
![]() 1,4.
1,4.
Результаты измерений максимальной глубины зондирования можно использовать при сравнении характеристик визуализации однотипных сканеров, при оценке эффективности проведенной модернизации и в некоторых случаях, когда необходимо найти поврежденные преобразователи при некотором снижении чувствительности системы. Измерения максимальной глубины зондирования полезно выполнять на приемочных испытаниях сканера, в процессе рутинного контроля его характеристик при эксплуатации, а также после модернизации аппаратного и программного обеспечения. Однако в некоторых случаях увеличение глубины обзора сопровождается уменьшением разрешения в поперечном направлении из-за преимущественного затухания высокочастотных составляющих сигнала в тканях и/или при использовании в приемном тракте ультразвуковой системы фильтров низких частот. Итак, максимальная глубина зондирования является только одним аспектом качества визуализации, так как она не несет информации по пространственному и контрастному разрешениям на рассматриваемых глубинах. Определение максимальной глубины зондирования рекомендуется рассматривать как простой, но полезный механизм оценки "наилучшего случая" изображения, ограничения которого связаны только с электрическими шумами.
Глубина обзора некоторых систем визуализации, работающих, в частности, на более низких частотах, превышает возможности большинства фантомов. В этом случае в результатах испытаний отмечают, что максимальная глубина зондирования превышает размеры фантома.
7.2 Локальный динамический диапазон
7.2.1 Установки органов управления систем сканирования
Локальный динамический диапазон - это изменения амплитуды эхосигналов, приводящие к изменению яркости изображения от единичного значения оцифрованного изображения до максимального, равного 255 при 8-битовом амплитудном разрешении, при неизменном положении отражателей и при неизменной установке органов управления сканером. Локальный динамический диапазон изменяет оператор с помощью органов управления, таких как "логарифмическое сжатие" и "предварительная обработка". Измеряют параметры системы при определенных фиксированных положениях органов управления. Следует выбирать такие параметры установки, которые являются наиболее общими при клиническом применении сканера. Эти параметры следует записать.
7.2.2 Метод измерения
Для имитации эхосигналов на датчик сканера следует подать акустические сигналы с изменяющейся и точно установленной амплитудой, использовав для этого прикладываемый (присоединенный) к датчику вспомогательный преобразователь, как это показано на рисунке 1 или 2. Частоту имитирующих сигналов рекомендуется выбирать в пределах ±10% частоты акустического воздействия (МЭК 62127-1) системы, органы управления которой установлены в режим измерения локального динамического диапазона. В методе, проиллюстрированном на рисунке 1, непрерывные синусоидальные сигналы низкой амплитуды, подаваемые на датчик сканера, излучает присоединенный к нему дополнительный преобразователь, возбуждаемый от генератора. В результате на экране монитора сканера возникают пятна от сигналов, имитирующих эхосигналы, яркость которых изменяют с глубиной в соответствии с установками усиления по зонам глубины (TGC - Time Gain Control), изменениями чувствительности датчика и настройкой фокуса датчика.
Область обзора (ROI - Region of Interest) выбирают в середине обзорного поля. Аттенюатор устанавливают в положение максимального ослабления. Затем регулируют усиление сканера таким образом, чтобы сигналы в выбранной области экрана достигли порогового уровня изображения, при котором их уже нельзя отличить от окружающих шумов. Это изображение регистрируют и сохраняют для последующего анализа. Затем снижают уровень ослабления аттенюатора на 5 дБ, записывают новое изображение и т.д. Эту процедуру продолжают до тех пор, пока яркость пятен в выбранной области не достигнет насыщения.
В процессе обработки следует определять максимальные значения яркости пикселей в оцифрованном изображении выбранной области обзора (ROI) для каждого значения ослабления. В программе проведения обработки может быть предусмотрено определение пиковых и средних значений яркости, а также стандартных отклонений от среднего значения в пределах выбранной области обзора (ROI). Программа может работать как в автономном режиме, так и с помощью системы обработки, встроенной в сканер, если таковая в нем предусмотрена. Затем получают графическую зависимость значений яркости изображения от относительной амплитуды сигналов возбуждения вспомогательного преобразователя, определяемой по установленным параметрам аттенюатора (см. рисунок 5). После этого по уровню сигнала, изменяющего яркость изображения от максимального до минимального уровней, определяют локальный динамический диапазон.
|
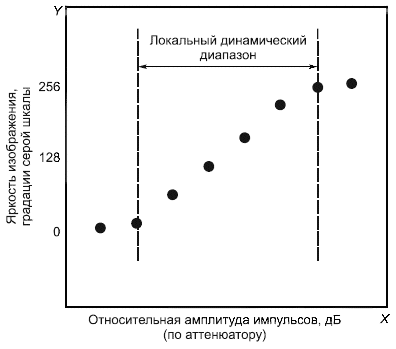
Рисунок 5 - Значения яркости оцифрованного изображения в зависимости от параметров аттенюатора при измерении локального динамического диапазона с помощью внешнего акустического сигнала
Можно использовать установку, схема которой изображена на рисунке 2. Здесь генератор тональных импульсов, синхронизированный с импульсами излучения датчика сканера, запускают сигналом вспомогательного преобразователя, акустически присоединенного к датчику. Сбор, сохранение и анализ данных проводят по той же процедуре. Некоторые типы генераторов тональных импульсов [17] обеспечивают экспоненциальное снижение сигнала после заранее установленного времени задержки. Эта функция может быть использована для определения локального динамического диапазона некоторых относительно простых сканеров, если известна степень экспоненциального снижения и диапазон глубин, на которых видимые эхосигналы изменяются от максимального до минимального уровней [20]. Однако многие современные сканеры имеют предварительную установку TGC, которая не может быть отменена пользователем. Кроме того, функции фокусировки методом динамической апертуры могут определить иную зависимость уровня эхосигнала от глубины зондирования. Поэтому для большинства ультразвуковых систем рассмотренная возможность не может быть использована, и для измерения локального динамического диапазона необходимо применять метод, рассмотренный в предыдущем абзаце.
7.2.3 Испытания типа II при измерении локального динамического диапазона
Более предпочтительным, чем использование вспомогательного преобразователя, показанного на рисунках 1 и 2, для испытаний некоторых систем визуализации, в частности, работающих с одноэлементными преобразователями, является подача сигнала от генератора тональных импульсов непосредственно на входной разъем сканера [18], [19]. В зависимости от функциональных возможностей генератора такой способ можно применять при проверке многих характеристик сканера, включая и локальный динамический диапазон. Ввод сигнала непосредственно в сканер с датчиком в виде электронной решетки также возможен, но при использовании специальных устройств для подачи сигналов на разъем для датчика. Разъемы должны быть совместимыми с испытуемым сканером. В любом случае сигнал от генератора подают на входные усилители сканера. При изменениях сигнала с известным шагом можно измерить яркость соответствующих изображений, как это показано на рисунке 5. Локальный динамический диапазон определяют по изменению входного сигнала, соответствующего изменениям яркости от минимальной до максимальной.
7.2.4 Оценка локального динамического диапазона по контрастности рассеивателей
Многие фантомы для контроля качества сканеров, применяемые в клиниках, содержат мишени (включения) с определенной контрастностью, изображаемые в В-режиме различными уровнями яркости. Контрастность таких мишеней отличается от контрастности окружающей среды обычно на минус 6 дБ, минус 3 дБ, +3 дБ и +6 дБ. Использование таких фантомов для оценки локального динамического диапазона рассмотрено в [16], [22].
Для оценки локального динамического диапазона следует установить характеристики коррекции сигнала при постпроцессинге (если он предусмотрен в системе) в линейный режим. Получают изображение фантома, как показано на рисунке 6, и сохраняют его в оцифрованном виде. Следует получить несколько (например 5) таких статистически независимых изображений.
|
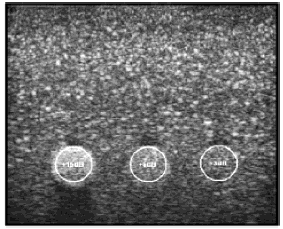
Рисунок 6 - Изображение фантома с включениями (круглыми), контрастностью +15 дБ, +6 дБ и +3 дБ
Анализ включает в себя очерчивание исследуемой области (неоднородности) на ее изображении и вычисление среднего значения яркости пикселя в изображении каждой неоднородности. Для исключения эффектов затенения из-за возможно большего затухания в этих включениях рекомендуется вычислять среднее значение яркости пикселей по верхней половине изображения неоднородности. Усредненное по всей группе пикселей значение яркости для каждой неоднородности затем представляют графической зависимостью от контрастности неоднородностей, как это показано на рисунке 7, где по оси отложен номинальный уровень контрастности неоднородностей в дБ, а по оси
- уровень в градациях серой шкалы. Для оценки локального динамического диапазона может быть использована линейная аппроксимация данных.
|

Рисунок 7 - Зависимость среднего значения яркости пикселей от контрастности неоднородностей
Линейная регрессия представлена в виде функции ![]() , где
, где - яркость усредненная по всем пикселям изображения мишени,
- относительная контрастность соответствующей мишени в дБ, а
и
- постоянные сглаживания. По этим линиям можно определить диапазон изменений контрастности, вызывающих изменение яркости от 1 до максимального значения (255), а значит, и оценить локальный динамический диапазон сканера.
Приложение А
(справочное)
Фантом для определения максимальной глубины зондирования
А.1 Фантом для определения максимальной глубины зондирования
Фантом для измерения максимальной глубины зондирования показан на рисунке А.1. Он состоит из блока тканеимитирующего материала. Чтобы обеспечить эффективный контроль глубины зондирования системы, удельный коэффициент затухания фантома должен быть (0,7±0,05) дБ см МГц
в частотном диапазоне от 1 до 15 МГц.
|
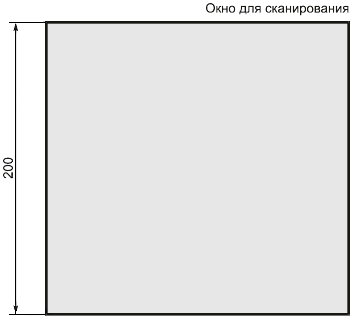
Рисунок А.1 - Схема фантома для измерений максимальной глубины зондирования
В коммерчески доступных фантомах применяют, как правило, материал с одним из двух значений уровня удельного коэффициента затухания: 0,5 дБ см МГц
и 0,7 дБ см
МГц
[11], [12]. Второе значение соответствует клиническим условиям исследования пациентов на максимальной глубине зондирования. Среднее значение коэффициента затухания равно 2,54 дБ см
на 3 МГц (что соответствует удельному коэффициенту затухания 0,84 дБ см
МГц
), было определено для тканей насыщенной жиром печени пациентов [23], значения 0,83 дБ см
МГц
- при болезненном состоянии печени [24]. Тем не менее значение 0,7 дБ см
МГц
является минимальным требованием для удельного коэффициента затухания фантома, используемого при измерениях максимальной глубины зондирования в соответствии с настоящим стандартом.
Для проведения эффективных испытаний систем, предназначенных для абдоминальных исследований, размер фантома должен быть таким, чтобы обеспечить не менее 20 см глубины зондирования наиболее глубоко расположенных мишеней. Скорость звука в материале при частоте его облучения 3 МГц должна составлять (1540±15) м/с. Коэффициент обратного рассеяния (на 3 МГц) должен быть равным (3·10 ±3 дБ) см
ср
, с частотной зависимостью в виде
, где 2
4 на частотах от 1 до 15 МГц. В [25] показано, что в лабораториях, занимающихся измерениями коэффициента обратного рассеяния, можно обеспечить уровень точности, требуемый для создания калиброванных эталонных фантомов [26], [27]. Несмотря на то что частотная зависимость коэффициента обратного рассеяния для многих тканей человеческого организма не имеет требуемого вида [23], указанное выше требование выбрано из тех соображений, что не известны материалы, наиболее адекватно отражающие реальные зависимости этой величины в тканях человека. На практике материалы содержат рассеивающие мишени с более простой частотной зависимостью (см. [11] и [12]), и это допустимо настоящим стандартом. Сведения о коэффициенте рассеяния, приводимые не на 1 МГц, а на 3 МГц, соответствуют малым и допустимым вариациям уровней эхосигналов, получаемых с различных глубин, для материалов, имеющих слабую частотную зависимость коэффициента рассеяния, при условии, что затухание в таком материале соответствует требованиям настоящего стандарта.
Все указанные выше акустические параметры должны быть приведены для температурного диапазона, регламентированного в разделе 5.
Приложение В
(справочное)
Использование тест-объектов для определения локального динамического диапазона
В.1 Общие положения
В настоящем приложении рассмотрены два типа тест-объектов и соответствующие им методы измерения локального динамического диапазона. Оба типа тест-объектов содержат группы отражателей для получения эхосигналов различной амплитуды. Рассмотрены поверхности раздела, генерирующие зеркальные отражения [28], а также те, размер которых соизмерим с длиной ультразвуковой волны [29]. И хотя тест-объекты с такими мишенями не выпускают серийно, их тщательная сборка и калибровка обеспечивают получение результатов, эквивалентных результатам, получаемым методами, рассмотренными в 7.2 настоящего стандарта. Для тест-объектов этого типа требуется, чтобы:
a) их отражающая поверхность была гладкой в пределах 1/20 длины волны, соответствующей самой высокой частоте испытуемого датчика;
b) толщина (длина мишени) была больше значения, соответствующего половине длительности ультразвукового импульса с учетом скорости звука в материале и окружающей среде;
c) форма их поверхности была строго оговорена (например, плоская);
d) были указаны их размеры.
Эти критерии достаточно исчерпывающи, и пользователь обязан подтверждать соответствие им в технических характеристиках тест-объекта.
В.2 Акустический тест-объект с зеркальными отражателями
В.2.1 Принципиальная схема тест-объекта
Тест-объект содержит группу зеркальных отражателей с известными значениями коэффициента отражения. Схема их возможного расположения показана на рисунке В.1. Преобразователь устанавливают над мишенями с помощью устройства позиционирования, обеспечивающего точные перемещения в двух поперечных направлениях (перпендикулярно к толщине и ширине пучка), а также точную регулировку наклона плоскости сканирования в направлении, перпендикулярном к толщине пучка. Преобразователь ориентируют так, чтобы получить изображение поверхности зеркальных отражателей с различными коэффициентами отражения ,
,
и
.
|
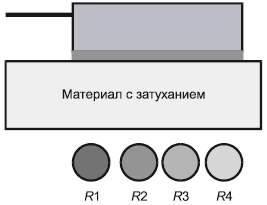
Рисунок В.1 - Возможная установка отражателей при определении локального динамического диапазона
Тест-объекты ![]() - это набор зеркально отражающих мишеней с известными значениями коэффициентов отражения. Такой набор можно сделать, например, из нержавеющей стали, акриловой смолы, полиэтилена и силиконовой резины [28], [30]. Мишени могут быть установлены в бак с водой или с тканеимитирующим материалом. Амплитуда эхосигналов от зеркального отражателя может быть очень чувствительна к ориентации отражателя относительно ультразвукового пучка. Поэтому следует тщательно ориентировать все отражатели.
- это набор зеркально отражающих мишеней с известными значениями коэффициентов отражения. Такой набор можно сделать, например, из нержавеющей стали, акриловой смолы, полиэтилена и силиконовой резины [28], [30]. Мишени могут быть установлены в бак с водой или с тканеимитирующим материалом. Амплитуда эхосигналов от зеркального отражателя может быть очень чувствительна к ориентации отражателя относительно ультразвукового пучка. Поэтому следует тщательно ориентировать все отражатели.
Другим материалом, который мог бы быть применен в качестве слабого отражателя с известными коэффициентами отражения, является полигидроксиэтилметакрилат (рНЕМА) [31]. Этот материал иногда применяют для изготовления контактных глазных линз, его можно приобрести у Ciba/Geigy и других производителей контактных линз. Отлитый или отформованный материал впитывает воду в количестве, зависящем от химического состава этого материала. Применяют три типа материала: W38, W88 и W72; значения их коэффициентов отражения в воде относительно идеального плоского отражателя равны (минус 15,8±0,2) дБ, (минус 23,3±1,0) дБ и (минус 33,1±1,0) дБ соответственно [31].
Коэффициенты отражения таких отражателей можно подтвердить в акустических лабораториях при измерениях с помощью одноэлементного преобразователя, приемника импульсов и осциллографа.
Для снижения амплитуды эхосигналов от мишеней необходим акустический аттенюатор. Он может быть сделан из тканеимитирующего материала или какого-либо другого поглотителя, например, из резины. Для снижения эхосигналов от самого сильного отражателя необходимо иметь значительное акустическое поглощение, которое обеспечивает отсутствие насыщения по яркости изображения при установке усиления сканера на середину диапазона. Блок из тканеимитирующего материала с коэффициентом затухания 0,7 дБ·см на 1 МГц, толщиной 4 см будет снижать сигнал частотой 4 МГц на 22,4 дБ, т.е. до приемлемого уровня. В другом варианте отражатели могут быть установлены непосредственно в фантом с тканеимитирующим материалом на пути между преобразователем и отражателями.
В.2.2 Определение локального динамического диапазона с помощью зеркальных отражателей
Устанавливают датчик с помощью специального зажимного приспособления и получают изображение, показанное на рисунке В.1. Ориентируют плоскость сканирования так, чтобы получить максимально возможный сигнал. Затем настройкой общего усиления добиваются такой чувствительности сканера, чтобы быть уверенным, что изображение сигнала от самого сильного отражателя является насыщенным по яркости. Для систем с 8-битовыми пикселями изображения такая процедура приведет к тому, что, по меньшей мере значение одного пикселя в наборе эхосигналов от отражателя будет на уровне 255. При той же самой настройке чувствительности отображают более слабые отражатели в фантоме. Динамический диапазон находят по коэффициенту отражений самого слабого из видимых отражателей относительно наиболее сильного.
На рисунке В.2 светлые кружки относятся к измерениям при самом высоком усилении, а темные - при усилении, сниженном настолько, чтобы уровень эхосигналов от самого сильного отражателя соответствовал той же интенсивности, что и от самого слабого отражателя при высоком усилении.
|
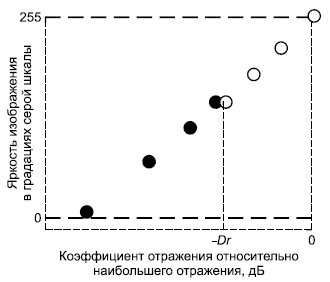
Рисунок В.2 - Зависимость интенсивности изображения (или значений яркости пикселей) от коэффициента отражения, определяемого относительно наибольшего отражения
Наиболее часто диапазон значений коэффициентов отражения набора зеркальных отражателей, определяющий диапазон амплитуд эхосигналов, меньше локального динамического диапазона сканера. Обозначим диапазон амплитуд эхосигналов как , т.е. по наиболее сильному отражателю. Для расширения диапазона измерения больше, чем
, можно выполнить следующую процедуру.
Предположим, что, как это рассмотрено выше, чувствительность сканера отрегулирована так, что яркость изображения самого хорошего отражателя близка к насыщению или к максимальному значению яркости в оцифрованном изображении. Рассматриваем изображения более слабых отражателей и отмечаем максимальные значения их яркости. Строим зависимость значений яркости по оцифрованным изображениям от коэффициентов отражения отражателей, как это показано на рисунке В.2 светлыми кружками.
Предположим, что в фантоме установлены четыре отражателя. Значение максимальной яркости пикселя для самого слабого отражателя при этом усилении, обозначаемом как "усиление 1", равно ![]() , где коэффициент отражения отражателя равен -
, где коэффициент отражения отражателя равен - дБ относительно самого сильного отражателя. Устанавливаем преобразователь так, чтобы получить изображение самого сильного отражателя, снижаем усиление системы на прием до тех пор, пока значение яркости изображения этого отражателя на станет равным
![]() . Обозначим это значение усиления как "усиление 2". Затем продолжим эту процедуру, находя значения яркости пикселей
. Обозначим это значение усиления как "усиление 2". Затем продолжим эту процедуру, находя значения яркости пикселей ![]() от каждого из слабых отражателей при этой настройке усиления ("усиления 2"), где
от каждого из слабых отражателей при этой настройке усиления ("усиления 2"), где относится к отражателю, а "2" - к "усилению 2". Воспользуемся новыми значениями для удлинения линии, представляющей зависимость оцифрованных значений яркости от коэффициента отражения, показанную на рисунке В.2 темными кружками.
Если эхосигналы от самого слабого отражателя не достигают предельного значения при "усилении 2", процедуру следует продолжить. Вновь снижают усиление приемного тракта до тех пор, пока значение яркости изображения самого сильного отражателя не станет равным ![]() и продолжают процедуру определения яркости изображений других отражателей при "усилении 3", удлиняя тем самым искомую зависимость.
и продолжают процедуру определения яркости изображений других отражателей при "усилении 3", удлиняя тем самым искомую зависимость.
Значение локального динамического диапазона находят по коэффициенту отражения (относительно коэффициента самого сильного отражателя при первоначальной установке усиления) самого слабого отражателя ![]() , изображение которого еще можно выделить, т.е. из выражения
, изображение которого еще можно выделить, т.е. из выражения
![]() , (В.1)
, (В.1)
где - номер настройки усиления, необходимого для перекрытия локального динамического диапазона сканера, a
- наибольший коэффициент отражения в наборе отражателей тест-объекта.
Коэффициенты отражения многих материалов со слабыми отражающими свойствами зависят от температуры. Поэтому при проведении измерений при температурах, не совпадающих с той, которая имела место при калибровке отражателей, необходимо вводить соответствующие поправки, приведенные в [28].
В.3 Акустический тест-объект с мишенями в виде проволочек из нержавеющей стали с плоским торцом
В.3.1 Конструкция тест-объекта
Альтернативная конструкция тест-объекта для измерения локального динамического диапазона основана на использовании проволочек из нержавеющей стали с плоским торцом, погружаемых в дегазированную воду (рисунок В.3). Площадь поперечного сечения обратного рассеяния торца проволоки пропорциональна четвертой степени ее диаметра. Таким образом, группа проволочек различного диаметра будет генерировать эхосигналы с точно известной разницей в амплитуде. Значения площади сечения обратного рассеяния для проволочек различного размера показаны на рисунке В.4, взятом из [29].
Преимуществом такой конструкции по сравнению с зеркальными отражателями является больший диапазон амплитуд эхосигналов, что и требуется для измерений локального динамического диапазона [29], [32]. В диапазоне частот от 1 до 15 МГц рекомендуется использовать проволочки из нержавеющей стали диаметром от 50 до 1600 мкм (50; 75; 100; 150; 200; 300; 400; 600; 800; 1200 и 1600 мкм). Эти мишени представляют собой проволочки длиной 15 мм, укрепленные таким образом, чтобы их оси были ориентированы в направлении падающего ультразвукового пучка.
|
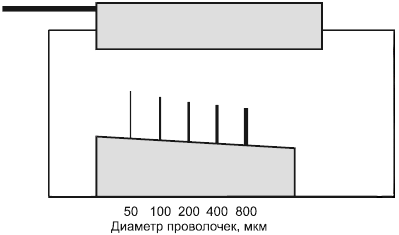
Рисунок В.3 - Тест-объект из проволочек с плоскими торцами для определения локального динамического диапазона
Мишени погружены в дегазированную воду и установлены таким образом, чтобы эхосигналы от их торцов были видны на мониторе сканера без эффектов интерференции с сигналами, отраженными от структуры, поддерживающей эти проволочки. Расстояние между проволочками должно быть выбрано таким, чтобы эхосигналы от мишени с большим отражением не интерферировали с сигналами от слабых мишеней. С учетом особенностей осевого разрешения сканера более слабые мишени рекомендуется устанавливать ближе к преобразователю (на расстоянии, примерно равном длительности импульса, умноженной на скорость звука). При более точных измерениях расстояния от преобразователя до каждой мишени должны быть одинаковыми, чтобы избежать погрешностей, связанных, например, с изменениями усиления в зависимости от глубины при включенном TCG. Для устройства, показанного на рисунке В.3, это потребует получения изображения для каждой мишени по отдельности, чтобы каждая рассматриваемая мишень всегда находилась на одной и той же глубине.
На рисунке В.4 представлены значения площади поперечного сечения обратного рассеяния торцов проволочек диаметром от 50 до 3800 мкм. Диапазон значений интенсивности эхосигналов от них равен 76 дБ. Для применения таких проволочек в частотном диапазоне до 10 МГц максимальный диаметр проволоки рекомендуется выбирать равным 1 мм. Для измерений локального динамического диапазона ультразвуковых сканеров, работающих на низких частотах, можно выбрать проволоки большего диаметра (до 3,2 мм) [29].
Прямые линии на рисунке В.4 соответствуют теоретической зависимости площади поперечного сечения обратного рассеяния торцов проволочек от их диаметра. Отклонение от теоретической зависимости для больших значений диаметра можно объяснить неточностью в ориентации торцов проволочек, а для малых - упрощенностью теоретической модели.
|

Рисунок В.4 - Зависимость экспериментально полученных значений площади поперечного сечения обратного рассеяния от плоского торца проволочек из нержавеющей стали от их диаметра на частотах 9,6 МГц (), 4,8 МГц (
) и 2,4 МГц (
) [29]
В.3.2 Определение локального динамического диапазона с помощью мишеней из проволочек с плоским торцом
Следует тщательно отъюстировать положение и наклон плоскости сканирования так, чтобы ось ультразвукового пучка, направленного поочередно на каждую мишень (проволочку), была ей параллелльна. Для преобразователей в виде электронных линейных решеток этого можно достичь выбором места установки и угла наклона датчика с тем, чтобы получить максимальный эхосигнал от выбранной мишени (проволочки). Для секторных датчиков, излучение которых осуществляется под разными углами, можно учесть тот факт, что их центральный пучок обычно перпендикулярен к поверхности датчика. Затем получают изображения мишеней и используют калибровочные кривые, представленные на рисунке В.4. При использовании устройства для микроперемещений преобразователя по ортогональным осям и
, а также для юстировки его наклона можно повысить точность получаемых результатов.
Юстировка преобразователя более необходима для визуализации больших мишеней, нежели малых. Lubbers и Graaff [29] дают следующее соотношение между частотой (в МГц), диаметром мишени
(в мм), требуемой точностью ориентации
(в градусах) и точностью определения значения площади поперечного сечения обратного рассеяния
(в дБ)
![]() .
.
Методика изменения усиления сканера для расширения диапазона измерения амплитуд эхосигналов, превышающего диапазон коэффициентов отражения отражателей, и методика проведения последующего анализа аналогичны рассмотренным в В.2.2 для зеркальных отражателей. Преимуществом этого метода по сравнению с применением зеркальных отражателей является то, что можно без труда обеспечить большой диапазон эхосигналов, превышающий 80 дБ [29]. Одним из недостатков может быть наличие артефактов, связанных с эффективной шириной пучка. Они могут вызвать увеличение протяженности эхосигналов в зависимости от угла обзора.
Примечание - Это наблюдается для преобразователей с большой апертурой. Но этот эффект еще требует теоретического анализа и экспериментального подтверждения.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
IEC 60601-1:2005 | - | * |
IEC 60050-801:1994 | - | * |
IEC 60050-881:1983 | IDT | ГОСТ Р МЭК 60050-881-2008 "Международный электротехнический словарь. Глава 881. Радиология и радиологическая физика" |
IEC 61161:2006 | IDT | ГОСТ Р МЭК 61161-2009 "Государственная система обеспечения единства измерений. Мощность ультразвука в жидкостях. Общие требования к методикам измерений в диапазоне частот от 0,5 до 25 МГц" |
IEC 61391-1:2006 | IDT | ГОСТ Р МЭК 61391-1-2011 "Государственная система обеспечения единства измерений. Оборудование медицинское ультразвуковое диагностическое. Общие требования к методикам калибровки систем измерения расстояний" |
IEC 62127-1:2007 | IDT | ГОСТ Р МЭК 62127-1-2009 "Государственная система обеспечения единства измерений. Параметры полей ультразвуковых. Общие требования к методам измерений и способам описания полей в частотном диапазоне от 0,5 до 40 МГц" |
* Соответствующий национальный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT - идентичные стандарты. | ||
Библиография
[1] | ALIUM (1990). Standard Methods for Measuring Performance of Pulse-Echo Ultrasound Imaging Equipment. American Institute of Ultrasound in Medicine 14750 Sweitzer Lane, Laurel, MD20707 |
[2] | GOODSITT M., CARSON P.L., WITT S., HYKES D.I., and KOFLER J.M. Real Time B-mode Ultrasound Quality Control Test Procedures. Med. Physics, 1998, 25, pp.1385-1406 |
[3] | SHI H, AL-SADAH J., MACKIE Т., ZAGZEBSKI J. Signal to noise ratio estimates of ultrasound depth of penetration. Med. Physics, 2003. 30 (6): 1367-1367 June (Abstract) |
[4] | USTUNER K. and HOLLEY G. Ultrasound Imaging System Performance Assessment. In Proceedings of the 2003 Meeting of the American Association of Physicists in Medicine, Pittsburgh, PA, USA, July. Text available at: http://www.aapm.orq/meetinqs/03AM/pdf/9905-9858. pdf, AAPM Symposium, 2003 |
[5] | GORNY K.R., TRADUP D.J., BERNATZ S., STEKEL S., and HANGIANDREOU N.J. Evaluation of automated DOP measurement for the purpose of ultrasound scanner comparison. J Ultrasound Med, 1004, 23, S76 (Abstract) |
[6] | GORNY K.R, TRADUP D.J, HANGIANDREOU N.J. Implementation and validation of three automated methods for measuring maximum depth of penetration: application to ultrasound quality control. Med. Phys, 2004, Aug.32 (8), pp.2615-2628 |
[7] | TRADUP D., JOHNSON L., STEKEL S., HANGIANDREOU N. Initial experience with an automated system for measuring ultrasound image quality. J. Ultrasound Med, 2005, 26: S230, March, (Abstract) |
[8] | GIBSON N., DUDLEY N., and GRIFFITH K. A computerized quality control testing system for B-mode ultrasound. Ultrasound Med & Biol, 2001, 27, pp.1697-1711 |
[9] | ICRU Report 61 (1998): Tissue Substitutes, Phantoms and Computational Modelling in Medical Ultrasound. International Commission on Radiation Units and Measurements, Bethesda, MD, USA |
[10] | MADSEN E., ZAGZEBSKI J., BANJAVIC R. and JUTILA R. Tissue-mimicking materials for ultrasound phantoms. Medical Physics, 1978, 5. pp.391-394 |
[11] | MADSEN E. "Ultrasonically soft-tissue-mimicking materials". In The Medical Physics of CT and Ultrasound: Tissue Imaging and Characterization, Fullerton G. and Zagzebski J., editors, AAPM Monograph 6, American Association of Physicists in Medicine, 335 E. 45th Street, New York, NY, 10017, pp.531-550, 1980 |
[12] | MADSEN E., ZAGZEBSKI J., MACDONALD M. and FRANK G. Ultrasound focal lesion detectability phantoms. Medical Physics, 1991, 18. pp.1171-1180 |
[13] | MADSEN E., ZAGZEBSKI J., MEDINA I., FRANK G., Performance Testing of Transrectal US Scanners. Radiology, 1994, 190 (1). pp.77-80 |
[14] | MADSEN E.L, FRANK G.R, Dong F. Liquid or solid ultrasonically tissue-mimicking materials with very low scatter. Ultrasound Med & Biol, 1998, 24 (4), pp.535-542 |
[15] | WILSON Т., ZAGZEBSK J., LI Y.D. A test phantom for estimating changes in the effective frequency of an ultrasonic scanner. J. Ultrasound in Med, 2002, 21 (9), pp.937-945 |
[16] | THIJSSEN J.M., WEIJERS G. and KORTE C.L. Objective Performance Testing and Quality Assurance of Medical Ultrasound Equipment. Ultrasound Med & Biol., 2007, 33, pp.460-471 |
[17] | DUGGAN T. and SILK M., (1983):"Assessment of ultrasound scanners by acoustic signal injection". Proceedings of the Third Meeting of the World Federation for Ultrasound in Medicine and Biology. R. Lerski and P. Morley, Eds., 1983, (Pergamon Press, New York) |
[18] | REUTER R., TRIER H.G. and LEPPER R.D. Der Echosimulator, ein Funktionsgenerator zur Messung relevanter Eigenschaften von Ultraschalldiagnostik - Geraten. Biomed. Technik, 1980, 25, pp.163-166 |
[19] | TRIER H.G., REUTER R. and LEPPER R.D. Quality assurance by equipment performance testing : Merits of electric test generators. Proc. 4 |
[20] | CARSON, P. Rapid Evaluation of Many Pulse Echo System Characteristics by use of a Triggered Pulse Burst Generator with Exponential Decay. J. Clin. Ultrasound, 1976, 4, pp.259-276 |
[21] | NEMA (2004), Digital imaging and communications in medicine (DICOM) Part 1: Introduction and overview, National Electrical Manufacturers Association, Rosslyn , VA, USA, p.21 |
[22] | VAN WIJK M.C. and THIJSSEN J.M. Performance Testing of Medical Ultrasound Equipment: fundamentals and harmonic modes. Ultrasonics, 2002, 40, pp.585-591 |
[23] | LU Z., ZAGZEBSKI J., and LEE F. (1999), Ultrasound backscatter and attenuation in human liver with diffuse disease. Ultrasound Med & Biol, 1999, 25, pp.1047-1054 |
[24] | LU Z., ZAGZEBSKI J., O'BRIEN W. and STEINBERG H. Ultrasound attenuation and backscatter in the liver during prednisone administration. Ultrasound Med & Biol, 1997, 25, pp.1-8 |
[25] | ALUM (1995), Methods for Specifying Acoustic Properties of Tissue Mimicking Phantoms and Objects: Stage 1. American Institute of Ultrasound in Medicine 14750 Sweitzer Lane, Laurel, MD 20707 |
[26] | WEAR K., STILES Т., FRANK G. et al. Interlaboratory comparison of ultrasonic backscatter coefficient measurements from 2 to 9 MHz. J. Ultrasound Med, 2005, 24, pp.1235-1250 |
[27] | MADSEN E., DOHG F., FRANK G. et al. Interlaboratory comparison of ultrasonic backscatter, attenuation, and speed measurements. J. Ultrasound Med, 1999, 18, pp.615-631 |
[28] | CARSON P., OUGHTON T. Performance Measurements on a real time ultrasound scanner. Proceedings of the 29th Annual Conference on Engineering in Medicine and Biology, Boston, MA |
[29] | LUBBERS J., and GRAAFF R. Flat ended steel wires, backscattering targets for calibrating over a large dynamic range. Ultrasound Med & Biol, 2006, 32, pp.1585-1599 |
[30] | SELFRIDGE A.R. Approximate Material Properties in Isotropic Materials. IEEE Transactions on Sonics and Ultrasonics, 1985, SU-32 (3), pp.381-394 |
[31] | HAIGIS W. and BUSHMANN W. Echo reference standards in ophthalmic ultrasonography. Ultrasound Med & Biol, 1985, 11, pp.149-155 |
[32] | PRESTON R.C. and BOND A.D. An experimental study of the reflection from spherical and flat ended cylindrical targets suitable for fetal Doppler performance. Ultrasound Med & Biol, 1997, 23, pp.117-128 |
УДК 616.073.43.71:006.354 | ОКС 17.140.50 |
Ключевые слова: медицинское ультразвуковое диагностическое оборудование, мишень, сканирование, тест-объект, тканеимитирующий материал, ультразвуковой сканер, фантом | |
Электронный текст документа
и сверен по:
, 2019
{kind=link}