ГОСТ Р 55177-2012
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Вибрация
ИЗМЕРЕНИЯ ВИБРОАКУСТИЧЕСКИХ ХАРАКТЕРИСТИК УПРУГИХ ВСТАВОК С ЖИДКОСТЬЮ В ЛАБОРАТОРНЫХ УСЛОВИЯХ
Общие принципы измерений
Vibration. Laboratory measurement of vibration-and-acoustic properties of resilient elements filled with liquids. General principles of measurements
ОКС 17.140.01
Дата введения 2013-12-01
Предисловие
1 РАЗРАБОТАН Автономной некоммерческой организацией "Научно-исследовательский центр контроля и диагностики технических систем" (АНО "НИЦ КД")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 183 "Вибрация и удар"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 23 ноября 2012 г. N 1153-ст.
4 ВВЕДЕН ВПЕРВЫЕ
5 ПЕРЕИЗДАНИЕ. Март 2019 г.
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
1 Область применения
Настоящий стандарт устанавливает общие принципы проведения лабораторных измерений для определения частотно-зависимых динамических характеристик (механических, акустических, механоакустических и акустомеханических) упругих вставок с жидкостью (далее - упругих вставок), а также руководство по выбору метода определения динамических жесткостей упругих вставок в конкретных условиях применения.
Настоящий стандарт распространяется на упругие вставки в трубопроводах, применяемые для ослабления вибрации и звука, распространяющихся по трубопроводу от источника (машины, оборудование) к местам нахождения человека и в окружающие конструкции и среды.
Частотные характеристики, полученные с помощью описанных в настоящем стандарте методов, могут быть использованы:
- для заявления этих характеристик изготовителями и поставщиками в документации на продукцию;
- для подтверждения заявленных характеристик;
- при разработке продукции;
- в системах управления качеством продукции;
- при виброакустических расчетах конструкций.
Методы, установленные настоящим стандартом, применимы при выполнении условий:
a) линейности отклика упругой вставки на прилагаемое силовое воздействие.
Примечание 1 - Методы применимы для упругих вставок с нелинейными характеристиками, если после приложения статических нагрузок их поведение описывается линейными уравнениями (в заданном динамическом диапазоне амплитуд);
b) распространения колебательной энергии жидкостью внутри упругих вставок в виде нормальных плоских волн;
c) точечного контакта упругих вставок с жесткими элементами конструкции (трубопроводом, корпусом машины).
Примечание 2 - Условие точечного контакта можно считать выполненным, если измерения проводят в диапазоне частот, в котором трубопроводы совершают балочные колебания без деформации поперечных сечений.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р ИСО 2041 Вибрация, удар и контроль технического состояния. Термины и определения
ГОСТ Р ИСО 10846-1 Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 1. Общие принципы измерений
ГОСТ Р ИСО 10846-2 Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 2. Прямой метод определения динамической жесткости упругих опор для поступательной вибрации
ГОСТ Р 54500.3* Неопределенность измерения. Часть 3. Руководство по выражению неопределенности измерения
___________________
* Действует ГОСТ 34100.3-2017.
ГОСТ Р 54500.3.1** Неопределенность измерения. Часть 3. Руководство по выражению неопределенности измерения. Дополнение 1. Трансформирование распределений с использованием метода Монте-Карло.
___________________
** Действует ГОСТ 34100.3.1-2017.
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год.Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины и определения по ГОСТ Р ИСО 2041 и ГОСТ Р ИСО 10846-1, а также следующие термины с соответствующими определениями.
3.1 упругая вставка (с жидкостью): Виброизолятор, основной функцией которого является ослабление колебаний и волн, распространяющихся по конструкции и в жидкости трубопроводов, в определенном диапазоне частот.
3.2 вход упругой вставки: Торцевая сторона упругой вставки первая по течению жидкости при нормальном режиме протекания жидкости в трубопроводе.
Примечание 1 - Разделение сторон упругой вставки на входную и выходную во многом условно, особенно если упругая вставка симметрична и эти стороны взаимозаменяемы. В испытательных установках, описанных в настоящем стандарте, во всех случаях предполагается, что силовое воздействие подается на вход упругой вставки. Чтобы получить значения импедансов, требующих подачи возбуждения на выход упругой вставки, ее входную и выходную сторону следует поменять местами (перевернуть). При этом направление течения жидкости через упругую вставку следует изменить на противоположное.
Примечание 2 - Фланец на входе упругой вставки называется входным фланцем.
3.3 выход упругой вставки: Торцевая сторона упругой вставки, противоположная входной стороне.
Примечание 1 - См. примечание 1 к терминологической статье 3.2.
Примечание 2 - Фланец на выходе упругой вставки называется выходным фланцем.
3.4 звуковое давление (в жидкости): Переменное давление, создаваемое волнами, распространяющимися в жидкой среде.
3.5 объемная скорость (жидкости): Объем жидкости, проходящий через заданную поверхность, нормальную к направлению распространения волны, в единицу времени.
Примечание - Объемную скорость можно определить формулой
![]() , (1)
, (1)
где - элемент площади поверхности
, для которой определяют
;
- нормальная составляющая колебательной скорости частиц жидкости на поверхности
.
3.6 частотная характеристика: Частотно-зависимое отношение комплексных величин, одна из которых характеризует обобщенную вынуждающую силу, а другая - движение, являющееся откликом на приложенное воздействие.
Примечание 1 - Данное определение является модифицированным по отношению к ГОСТ ИСО 2041-2012*, (терминологическая статья 1.53).
________________
* Вероятно, ошибка оригинала. Следует читать: ГОСТ Р ИСО 2041-2012. - .
Примечание 2 - Величинами, характеризующими воздействие, могут быть, например, сила, момент сил, звуковое давление. Величинами, характеризующими отклик, могут быть, например, скорость, угловая скорость, объемная скорость жидкости.
Примечание 3 - Понятие частотной характеристики используют, как правило, для линейных систем.
Примечание 4 - Если отклик выражают через скорость (скорость вибрации фланца или объемную скорость жидкости), то соответствующая частотная характеристика называется импедансом. Если обобщенная вынуждающая сила и отклик в виде скорости определены на одной и той же стороне (входной или выходной) упругой вставки, то соответствующая частотная характеристика называется входным импедансом, если на разных - переходным импедансом. В термине "входной импеданс" слово "входной" часто опускают, если смысл термина ясен из контекста.
Примечание 5 - Следует различать применение понятий "входной", "вход" в терминах "входной импеданс" и "входной фланец" или "вход упругой вставки". Входной импеданс может быть определен как на входе упругой вставки, так и на ее выходе.
Примечание 6 - Значение импеданса существенно зависит от граничных условий. В настоящем стандарте предполагается, что движение совершает только та точка и только в том направлении, для которой определяют отклик, а скорости остальных точек и точки отклика в других направлениях равны нулю.
3.7 механический импеданс: Частотная характеристика, представляющая собой отношение комплексных величин динамической силы, действующей на фланец упругого элемента в заданном направлении, и комплексной скорости вибрации фланца упругого элемента в том же или в другом заданном направлении.
Примечание 1 - Если комплексные сила и скорость определены на одном и том же фланце (входном или выходном) упругой вставки с жидкостью, то их отношение называют входным механическим импедансом, а если на разных - переходным механическим импедансом.
Примечание 2 - Фланец упругой вставки способен совершать движения с шестью степенями свободы. Составляющая силы (момента силы) в заданном направлении движения и составляющая скорости (угловой скорости) в том же или в другом заданном направлении определят составляющую матрицы механических импедансов.
Примечание 3 - В настоящем стандарте предполагается выполнение следующих граничных условий при определении механического импеданса: скорости вибрации фланца, на котором определяют отклик, по всем степеням свободы кроме той, для которой определяют отклик, скорости вибрации противоположного фланца по всем шести степеням свободы равны нулю.
3.8 акустический импеданс: Частотная характеристика, представляющая собой отношение комплексных величин звукового давления в жидкости и объемной скорости жидкости.
Примечание 1 - Если комплексные звуковое давление и объемная скорость определены на одной и той же стороне (входной или выходной) упругой вставки, то их отношение называют входным акустическим импедансом, а если на разных - переходным акустическим импедансом.
Примечание 2 - В настоящем стандарте предполагается выполнение следующих граничных условий при определении акустического импеданса: движение совершает только точка, в которой определяют объемную скорость жидкости, а скорости колебаний жидкости на противоположном конце упругой вставки, равно как и скорости вибрации фланцев упругой вставки по всем шести степеням свободы равны нулю.
3.9 механоакустический импеданс: Частотная характеристика, представляющая собой отношение комплексных величин динамической силы, действующей на фланец упругого элемента, и объемной скорости жидкости.
Примечание 1 - Если комплексные сила и объемная скорость определены на одной и той же стороне (входной или выходной) упругой вставки, то их отношение называют входным механоакустическим импедансом, а если на разных - переходным механоакустическим импедансом.
Примечание 2 - Фланец упругой вставки способен совершать движения с шестью степенями свободы. Составляющая силы (момента силы) в заданном направлении движения определит составляющую вектора (матрицы-столбца) механоакустических импедансов.
Примечание 3 - В настоящем стандарте предполагается выполнение следующих граничных условий при определении механоакустического импеданса: движение совершает только точка, в которой определяют объемную скорость жидкости, а скорости колебаний жидкости на противоположном конце упругой вставки, равно как и скорости вибрации фланцев упругой вставки по всем шести степеням свободы равны нулю.
3.10 акустомеханический импеданс: Частотная характеристика, представляющая собой отношение комплексных величин звукового давления в жидкости и скорости вибрации фланца упругой вставки.
Примечание 1 - Если комплексные звуковое давление в жидкости и скорость вибрации фланца определены на одной и той же стороне (входной или выходной) упругой вставки, то их отношение называют входным акустомеханическим импедансом, а если на разных - переходным акустомеханическим импедансом.
Примечание 2 - Фланец упругой вставки способен совершать движения с шестью степенями свободы. Составляющая скорости (угловой скорости) в заданном направлении движения определит составляющую вектора (матрицы-строки) акустомеханических импедансов.
Примечание 3 - В настоящем стандарте предполагается выполнение следующих граничных условий при определении акустомеханического импеданса: объемная скорость жидкости на входе и выходе упругой вставки, скорость вибрации фланца, на котором определена скорость, по пяти степеням свободы (кроме рассматриваемой), а также противоположного фланца по всем шести степеням свободы равны нулю.
3.11 силовая платформа: Жесткая конструкция с плоской поверхностью, на которую опирается фланец испытуемой упругой вставки и на которой установлены датчики силы (тензодатчики), позволяющие измерять динамические силы, действующие на фланец, для всех степеней свободы его движения.
Примечание - Моменты силы обычно измеряют с использованием пары датчиков силы.
4 Обозначения
В настоящем стандарте применены следующие условные обозначения:
- вектор динамической силы, включающий в себя три составляющих силы (
,
,
) и три составляющих момента сил (
,
,
);
- вектор динамической силы, приложенной к входному фланцу упругой вставки;
- вектор динамической силы, приложенной к выходному фланцу упругой вставки;
- звуковое давление в жидкости;
- звуковое давление в жидкости на входе упругой вставки;
- звуковое давление в жидкости на выходе упругой вставки;
- объемная скорость жидкости;
- объемная скорость жидкости на входе упругой вставки;
- объемная скорость жидкости на выходе упругой вставки;
- вектор скорости вибрации фланца, включающий в себя по три составляющих прямолинейной (
,
,
) и угловой (
,
,
) вибрации;
- вектор скорости вибрации входного фланца упругой вставки;
- вектор скорости вибрации выходного фланца упругой вставки;
,
,
- оси декартовой системы координат;
- матрица входных механических импедансов входного фланца упругой вставки;
![]() - матрица входных механических импедансов выходного фланца упругой вставки;
- матрица входных механических импедансов выходного фланца упругой вставки;
![]() ,
, ![]() - матрицы переходных механических импедансов упругой вставки;
- матрицы переходных механических импедансов упругой вставки;
- входной акустический импеданс на входе упругой вставки;
![]() - входной акустический импеданс на выходе упругой вставки;
- входной акустический импеданс на выходе упругой вставки;
![]() ,
, ![]() - переходные акустические импедансы упругой вставки;
- переходные акустические импедансы упругой вставки;
![]() - матрица-столбец входных механоакустических импедансов на входе упругой вставки;
- матрица-столбец входных механоакустических импедансов на входе упругой вставки;
![]() - матрица-столбец входных механоакустических импедансов на выходе упругой вставки;
- матрица-столбец входных механоакустических импедансов на выходе упругой вставки;
![]() ,
, ![]() - матрица-столбец переходных механоакустических импедансов упругой вставки;
- матрица-столбец переходных механоакустических импедансов упругой вставки;
![]() - матрица-строка входных акустомеханических импедансов на входе упругой вставки;
- матрица-строка входных акустомеханических импедансов на входе упругой вставки;
![]() - матрица-строка входных акустомеханических импедансов на выходе упругой вставки;
- матрица-строка входных акустомеханических импедансов на выходе упругой вставки;
![]() ,
, ![]() - матрица-строка переходных акустомеханических импедансов упругой вставки.
- матрица-строка переходных акустомеханических импедансов упругой вставки.
5 Теоретические основы измерений
5.1 Общие положения
В настоящем стандарте рассматриваются прямые методы измерений импедансов упругих вставок (см. [1]). Согласно этим методам с помощью измерительной установки создаются заданные граничные условия колебаний входного и выходного фланцев и жидкости на входе и выходе упругой вставки, а также условия статического нагружения. Под статическим нагружением понимается совокупность статической силы, прилагаемой к фланцу упругой вставки, и статического давления в жидкости внутри вставки. Статическое нагружение определяется условиями работы упругой вставки в составе трубопровода и задается изготовителем.
В ходе измерений осуществляют возбуждение колебаний фланцев или жидкости и регистрацию колебаний фланцев и жидкости, а также динамических сил, действующих на фланцы, и звуковых давлений в жидкости на входе и выходе упругой вставки. На основе полученных данных определяют компоненты общей матрицы импедансов упругой вставки.
5.2 Матрица импедансов
5.2.1 Общий вид матрицы импедансов
В диапазоне частот распространения в трубопроводах нормальных плоских волн и отсутствия деформации поперечных сечений трубопроводов связи силовых и кинематических параметров гармонических колебаний на входе и выходе упругой вставки в трубопроводе могут быть описаны формулами, которые в блочно-матричной форме записи имеют вид
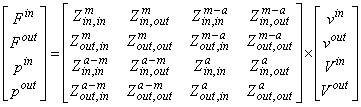 . (2)
. (2)
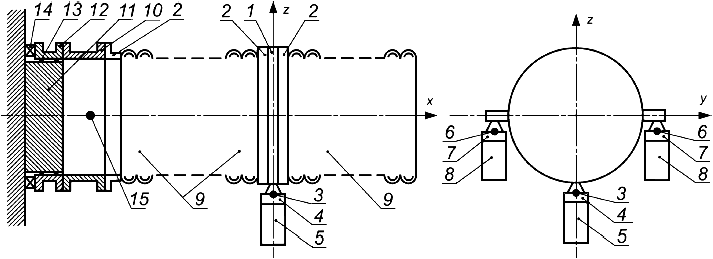
На рисунке 1 изображена система координат и направления скоростей и динамических сил на входе и выходе упругой вставки.
|
1 - вход упругой вставки; 2 - выход упругой вставки
Рисунок 1 - Система координат и направления скоростей и динамических сил в упругой вставке
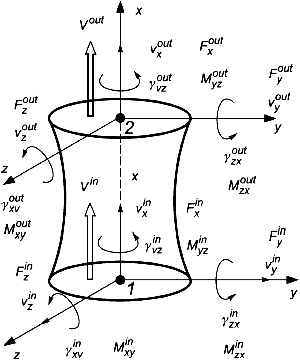
Матрицы механических импедансов имеют размерность 6x6 (что соответствует шести степеням свободы движений входного и выходного фланцев). Опустив подстрочные индексы ("in,in"; "in,out"; "out,in" или "out,out"), матрицу механических импедансов можно представить в виде
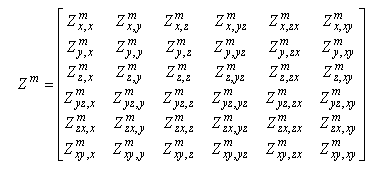 . (3)
. (3)
Примечание - Подстрочный индекс в виде обозначения одной из осей, например "", указывает на прямолинейное воздействие или движение вдоль этой оси. Две оси в подстрочном индексе, например "
" указывают на воздействие или движение в соответствующей плоскости, т.е. в данном случае, относительно оси
(см. рисунок 1).
Матрица-столбец механоакустических и матрица-строка акустомеханических импедансов имеют размерность соответственно 61 и 1
6 (что соответствует шести степеням свободы движения фланца и одной степени свободы движения жидкости). Опустив подстрочный индекс ("in,in"; "in,out"; "out,in" или "out,out"), эти матрицы можно представить в виде
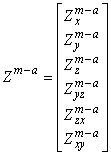 , (4)
, (4)
![]() . (5)
. (5)
Для матриц механических, механоакустических и акустомеханических импедансов выполняется соотношение (верхний индекс опущен)
![]() , (6)
, (6)
а для акустических импедансов выполняются соотношения
![]() . (7)
. (7)
С учетом этого из 196 членов полной матрицы импедансов формулы (3) различаются между собой только 105 членов.
Элементы матрицы импедансов являются частотными характеристиками. Каждый элемент матрицы импедансов определяют по отдельности во всем диапазоне частот применения метода.
Примечание - Для упрощения записи формул в настоящем стандарте зависимость от частоты в явном виде не указывается.
5.2.2 Разреженные матрицы импедансов
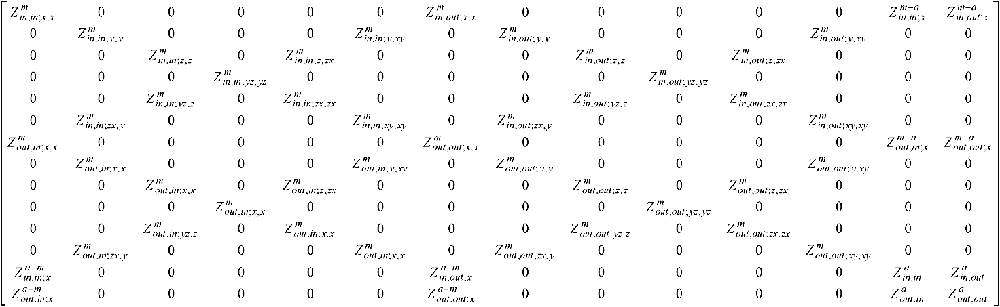
В большинстве случаев упругие вставки в трубопроводах представляют собой осесимметричные конструкции. Для них многие элементы матрицы импедансов оказываются равными нулю. Так для упругой вставки, симметричной относительно оси ненулевыми оказываются лишь 52 элемента матрицы импедансов, и из них по значению различаются только 14 элементов (см. приложение А). Обычно упругие вставки имеют одинаковые фланцы на входе и выходе, так как соединяют трубопроводы равных диаметров.
Для матриц импедансов с большим числом нулевых элементов уравнения связи между силовыми и кинематическими параметрами значительно упрощаются.
Нулевые элементы матрицы импедансов определяют на основе анализа конструкции упругих вставок, и в процессе испытаний значения этих элементов не измеряют.
Примечание - Поскольку реальные упругие вставки не обладают строгой симметрией, модули частотных характеристик "нулевых" элементов матрицы импедансов будут хотя и малыми, но все же отличными от нуля. Однако попытки оценить "реальные" значения таких частотных характеристик будут сопровождаться чрезмерно большой неопределенностью измерений, и погрешности таких оценок могут быть существенно больше погрешностей при априорном приписывании этим характеристикам нулевого значения.
5.3 Определение элементов матрицы импедансов
Частотные характеристики, которые представляют собой элементы матрицы импедансов, определяют в результате измерений на испытательных установках силовых (вектор динамической силы, давление) и кинематических параметров (скорость вибрации, объемная скорость жидкости) при гармоническом возбуждении (на дискретных частотах или с качанием частоты) с последующим определением отношений комплексных амплитуд этих параметров.
Пример - Переходный акустический импеданс ![]() определяется при граничных условиях
определяется при граничных условиях 0,
![]() 0,
0, 0 формулой
![]() , где
, где и
- комплексные амплитуды соответственно звукового давления и объемной скорости на частоте возбуждения.
Другим вариантом является использование широкополосного возбуждения и вычисление взаимных спектров сигналов.
В зависимости от конструкции упругих вставок для выполнения измерений элементов матрицы импедансов приходится использовать разные схемы испытательных установок, различающихся:
- способами крепления упругих вставок;
- способами воспроизведения силового возбуждения упругой вставки;
- местами установки датчиков сил и вибрации.
5.4 Диапазон частот применения метода
Ограничения, указанные в разделе 1, определяют диапазон частот применения метода, в котором значения элементов матрицы импедансов могут быть измерены с заданной неопределенностью (см. раздел 9).
В зависимости от геометрических размеров проходного сечения упругой вставки, трубопровода, а также жесткостей корда упругой вставки и системы трубопровода граничные диапазоны частот измерения отдельных элементов матрицы импедансов имеют разные значения, которые трудно оценить теоретически даже в первом приближении. Поэтому пользователю настоящего стандарта следует самостоятельно провести исследования для определения диапазона частот применения метода для конкретной испытательной установки и конкретных объектов испытаний.
Примечание - В качестве признаков выхода за пределы диапазона частот применения метода можно считать:
- резкое падение уровня функции когерентности;
- значительные изменения результатов измерений с изменением положения датчиков силы и вибрации (при неизменном виде кривых в низкочастотной области);
- сильная изрезанность полученной частотной характеристики (модуля) и наличие в ней пиков, переход через которые не сопровождается значительными (порядка 100°, в идеале 180°) скачками фазовой характеристики, характерными для областей резонансов.
5.5 Амплитуды возбуждения
Чрезмерно большие амплитуды возбуждения вибрации входного фланца упругой вставки или жидкости в упругой вставке способны привести к выходу за пределы диапазона линейности (см. ограничения метода в разделе 1), а также к нарушению граничных условий измерений, определенных в разделах 6, 7 и 8. С другой стороны, чрезмерно малые амплитуды возбуждения приведут к уменьшению отношения полезного сигнала к шуму, что также сделает результаты измерений недостоверными. Поэтому выбор амплитуды возбуждения следует основывать на расчете соответствующих составляющих неопределенности (см. раздел 9).
Примечание 1 - Индикатором чрезмерно малой амплитуды возбуждения может служить низкое значение функции когерентности, например ниже уровня 0,85 или даже 0,8 во всем диапазоне частот испытаний. Низкое значение функции когерентности обусловлено наличием в сигналах помимо полезной также побочной составляющих. Рекомендуется проводить анализ побочных составляющих в сигналах измеряемых величин и по возможности принять меры к их устранению. Если побочная составляющая имеет шумовую природу и некоррелированна или слабо коррелированна с полезным сигналом, то рекомендуется проводить усреднение результатов измерений по нескольким реализациям сигналов.
Примечание 2 - Контроль функции когерентности полезен для выявления условий, при которых результаты измерений становятся недостоверными. В то же время близость значения функции когерентности к единице еще не является гарантией высокой точности измерений. Точность измерений характеризуется их неопределенностью (см. раздел 9).
6 Измерения механических импедансов
6.1 Общие положения
Испытательные установки, используемые для измерения входных и переходных механических импедансов, должны обеспечивать соблюдение заданных условий работы упругой вставки (скорость потока жидкости, давление, температура и др.) и граничных условий, когда прямолинейная и угловая вибрация входного и выходного фланцев во всех точках и во всех направлениях, соответствующих шести степеням свободы, равна нулю за исключением точки и направления движения, для которых измеряют скорость вибрации*.
_______________
* Импеданс, соответствующий граничным условиям, когда в системе оставлена только одна степень свободы, а движение остальных точек в остальных направлениях заторможено, называют импедансом холостого хода. В настоящем стандарте независимо от вида импеданса (механический, акустический, механоакустический или акустомеханический) измерению подлежит импеданс холостого хода.
Пример - При измерении ![]() должны быть выполнены следующие граничные условия:
должны быть выполнены следующие граничные условия: ![]() 0;
0; ![]() 0.
0.
Общие принципы измерений элементов матрицы механических импедансов для разных направлений силы и скорости вибрации пояснены ниже на примерах.
6.2 Примеры установок для измерения механических импедансов
6.2.1 Пример испытательной установки для измерений ![]() и
и ![]() (
( может принимать значения
,
,
,
,
или
) осесимметричной упругой вставки приведен на рисунке 2. На рисунке 3 приведен пример испытательной установки для измерения тех же элементов матрицы механических импедансов упругой вставки, не обладающей осевой симметрией.
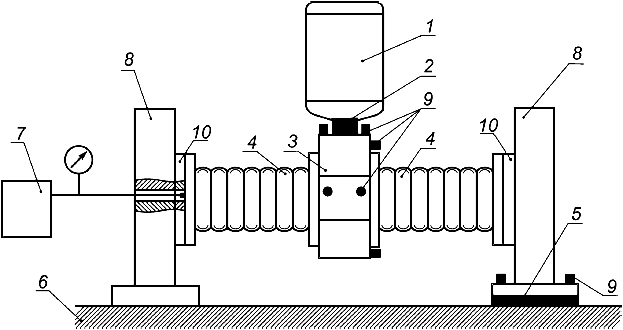
В испытательной установке на рисунке 2 силу в направлении оси упругой вставки на ее входе измеряют датчиками силы 8, а на выходе во всех направлениях движения - с помощью силовой платформы 10. Датчики вибрации на входном и выходном фланцах измеряют скорость движения в направлении оси упругой вставки.
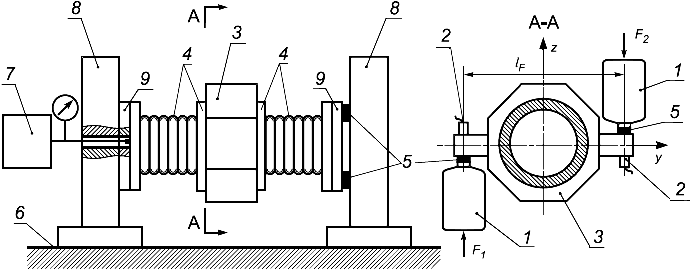
Для вставки, не обладающей осевой симметрией (рисунок 3), предполагается проводить измерения для двух номинально идентичных упругих вставок, установленных навстречу друг другу. Входные фланцы вставок соединены между собой с помощью промежуточной конструкции. Для измерений сил и скоростей вибрации на входном и выходном фланцах используют датчики силы 2 и датчики вибрации 5.
6.2.2 Пример испытательной установки для измерений ![]() и
и ![]() (
( может принимать значения
,
,
,
,
или
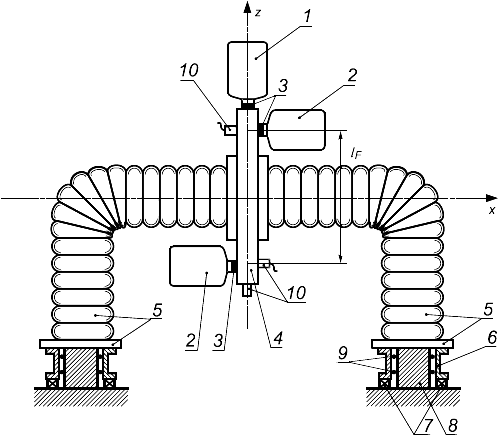
) осесимметричной упругой вставки, совершающей угловые колебания, приведен на рисунке 4. Из рисунка видно, что испытаниям одновременно подвергают две номинально идентичные упругие вставки. Угловую вибрацию на входе упругих вставок в плоскости
возбуждают с помощью двух вибровозбудителей. На выходные фланцы устанавливают заглушки и крепят к опоре 8 через четыре датчика силы. С помощью датчиков силы 5 измеряют моменты силы
на входе и все шесть составляющих вектора динамической силы на выходе упругой вставки. Датчики вибрации 2 используют для измерения угловой скорости вибрации
входного фланца и всех шести составляющих вектора скорости вибрации выходного фланца упругой вставки.
|
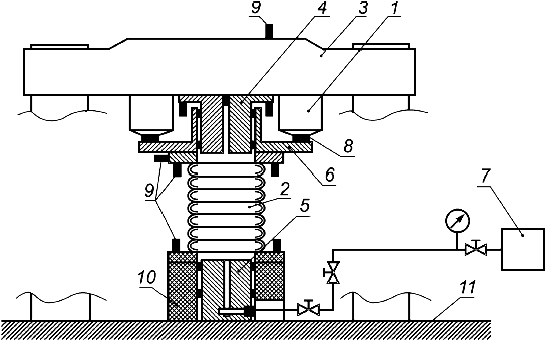
1 - вибровозбудитель; 2 - упругая вставка; 3 - жесткие и подвижные опоры; 4 - поршень с резиновыми уплотнительными кольцами на входе упругой вставки; 5 - поршень с резиновыми уплотнительными кольцами на выходе упругой вставки; 6 - стакан; 7- система подачи жидкости; 8 - датчик силы; 9 - датчики вибрации; 10 - силоизмерительная платформа; 11 - жесткий фундамент
Рисунок 2 - Пример испытательной установки для измерений механических импедансов осесимметричной упругой вставки при возбуждении колебаний вдоль оси вставки
|
1 - вибровозбудитель; 2 - датчики силы; 3 - жесткие стяжки; 4 - испытуемые упругие вставки; 5 - датчики вибрации; 6 - фундамент; 7 - поршень на выходе упругой вставки; 8 - поршень на входе упругих вставок; 9 - уплотнительные кольца; 10 - выходной фланец
Рисунок 3 - Пример испытательной установки для измерений механических импедансов угловой упругой вставки
|
1 - вибровозбудитель; 2 - датчик вибрации; 3 - промежуточная конструкция; 4 - испытуемые упругие вставки с жидкостью; 5 - датчик силы; 6 - жесткий фундамент; 7 - система подачи жидкости; 8 - опора; 9 - заглушка
Рисунок 4 - Пример испытательной установки для измерений механических импедансов осесимметричной упругой вставки при возбуждении угловой вибрации
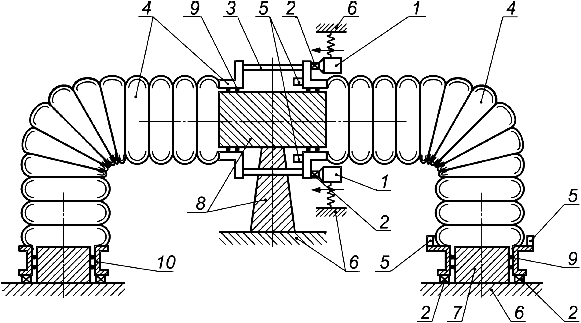
Пример испытательной установки для измерения тех же элементов матрицы механических импедансов упругой вставки, не обладающей осевой симметрией, приведен на рисунке 5. Данные измерения также предполагают размещение двух номинально идентичных угловых упругих вставок навстречу друг другу через промежуточную конструкцию. Способ возбуждения угловой вибрации входных фланцев, крепления выходных фланцев, установки датчиков силы и вибрации и измеряемые величины - те же, что для испытательной установки на рисунке 4.
Если конструкция упругой вставки допускает при возбуждении угловой вибрации относительно оси упругой вставки возникновение продольных и поперечных сил реакции оболочки упругой вставки и избыточного звукового давления в жидкости, то выходные фланцы должны быть соединены с жестким фундаментом так же, как показано на рисунке 3.
6.2.3 Пример испытательной установки для измерений ![]() ,
, ![]() и
и ![]() ,
, ![]() (
( может принимать значения
,
,
,
,
или
) осесимметричной упругой вставки, совершающей колебания в направлении, поперечном ее оси, приведен на рисунке 6. Из рисунка видно, что измерения проводят для двух номинально идентичных упругих вставок, установленных навстречу друг другу. Поперечные колебания на входе упругих вставок в направлении
или
возбуждают с помощью вибровозбудителя. Выходные фланцы крепят к жесткому и массивному фундаменту через жесткие опоры 8.
С помощью датчиков силы 2 измеряют силы и
, действующие на входные фланцы упругих вставок. С помощью силоизмерительных платформ 5 шесть составляющих вектора динамической силы на выходе упругой вставки. Датчики вибрации 9 используют для измерений скорости возбуждаемой поперечной вибрации
,
входных фланцев вставок и всех составляющих вибрации выходных фланцев упругой вставки. Такая схема установки упругих вставок позволяет обеспечить равенство нулю объемных скоростей жидкости на входе и выходе упругих вставок.
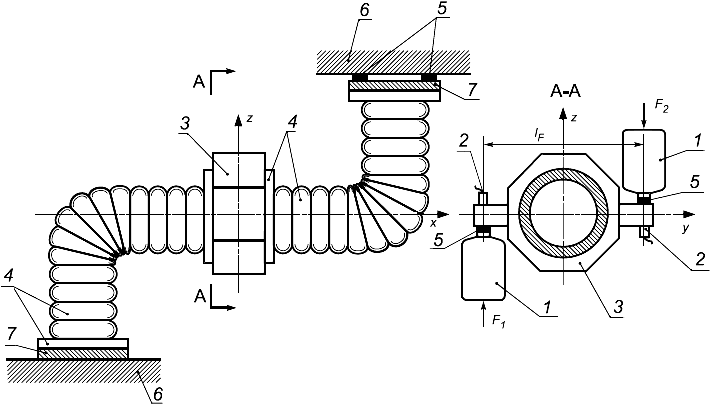
Пример испытательной установки для измерения тех же элементов матрицы механических импедансов упругой вставки, не обладающей осевой симметрией, приведен на рисунке 7.
|
1 - вибровозбудитель; 2 - датчик вибрации; 3 - промежуточная конструкция; 4 - испытуемые упругие вставки; 5 - датчик силы; 6 - жесткий фундамент; 7 - заглушка
Рисунок 5 - Пример испытательной установки для измерений механических импедансов угловой упругой вставки при возбуждении угловой вибрации
|
1 - вибровозбудитель; 2 - датчик силы; 3 - промежуточная конструкция; 4 - упругая вставка; 5 - силоизмерительная платформа; 6 - фундамент; 7 - система подачи жидкости; 8 - опора; 9 - датчик вибрации; 10 - заглушка
Рисунок 6 - Пример испытательной установки для измерений механических импедансов осесимметричной упругой вставки при возбуждении поперечной вибрации
|
1 - вибровозбудитель для возбуждения поперечных поступательных колебаний; 2 - вибровозбудители для возбуждения угловых колебаний; 3 - датчик силы; 4 - промежуточная конструкция с проходным отверстием для жидкости; 5 - упругие вставки; 6 - промежуточная конструкция для соединения выходных фланцев с фундаментом через датчики силы; 7- датчики силы на выходе упругих вставок; 8 - поршень; 9 - уплотнительные кольца; 10 - датчики вибрации
Рисунок 7 - Пример испытательной установки для измерений механических импедансов угловой упругой вставки при возбуждении поперечной вибрации
В данном случае две номинально идентичные упругие вставки также устанавливают навстречу друг другу. Поперечную вибрацию на входе упругих вставок в направлении или
возбуждают с помощью вибровозбудителя. Выходные фланцы крепят к жесткому и массивному фундаменту через жесткие промежуточные конструкции 6. Размещение датчиков силы и вибрации и измеряемые величины - те же, что в примере, показанном на рисунке 6.
6.2.4 Испытательные установки, представленные на рисунках 4, 5 и 7, используют также для измерений импедансов ![]() ,
, ![]() и
и ![]() ,
, ![]() (
( может принимать значения
,
,
,
,
или
) упругих вставок при воздействии на входе моментов сил относительно осей координат
и
.
7 Измерения акустических импедансов
В соответствии с определением при измерении акустических импедансов упругих вставок входные и выходные фланцы должны быть закреплены таким образом, чтобы скорости их вибрации (во всех направлениях) были равны нулю. Общие принципы измерений акустических импедансов пояснены на примерах (рисунок 8).
Входной и переходный акустические импедансы испытуемой упругой вставки рассчитывают с использованием результатов измерений звуковых давлений во входной и выходной измерительных камерах и скорости колебаний поршня на входе упругой вставки. При этом следует учитывать:
- изменение амплитуды и фазы при распространении волны на участке от поршня до входного сечения испытуемой упругой вставки;
- инерционные сопротивления участка входной камеры от гидрофона до входного сечения испытуемой упругой вставки и участка выходной камеры от гидрофона до выходного сечения упругой вставки;
- конечность жесткости столба жидкости в выходной измерительной камере.
|
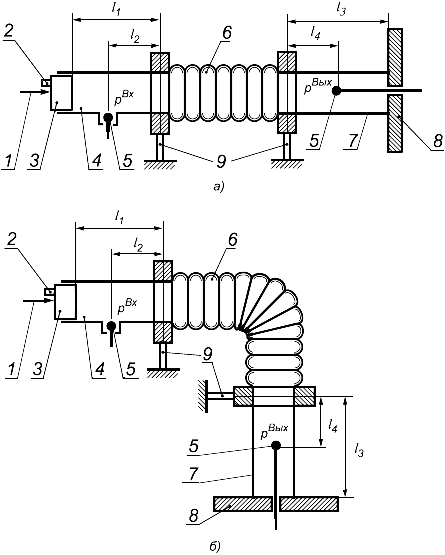
1 - вибровозбудитель; 2 - датчик вибрации; 3 - поршень; 4 - передняя измерительная камера; 5 - гидрофон; 6 - упругая вставка; 7 - задняя измерительная камера; 8 - жесткий фундамент; 9 - узел жесткого соединения фланцев с фундаментом
Рисунок 8 - Пример испытательной установки для измерений акустических импедансов
8 Измерения механоакустических и акустомеханических импедансов
Пример испытательной установки, на которой могут быть выполнены измерения всех элементов матрицы импедансов упругих вставок приведен на рисунке 9. Универсальность этой установки обеспечивается применением вибровозбудителей пьезоэлектрического типа. Четыре вибровозбудителя через датчики силы жестко связывают фланец упругой вставки с жестким фундаментом (с теоретически бесконечным входным импедансом), а центральный вибровозбудитель через датчик силы жестко связывает с фундаментом поршень. Такая схема расположения вибровозбудителей позволяет осуществлять по отдельности возбуждение как акустических, так и механических колебаний. При этом пьезоэлектрические вибровозбудители позволяют обеспечивать выполнение граничных условий:
- отсутствие вибрации входного фланца при возбуждении акустических колебаний в жидкости;
- равенство нулю объемной скорости жидкости на входе упругой вставки при возбуждении вибрации входного фланца.
На испытательной установке, показанной на рисунке 9, выполняют измерения механоакустических импедансов упругих вставок как обладающих, так и не обладающих осевой симметрией. При выполнении измерений механоакустических импедансов управляющий сигнал подают только на вибровозбудитель, соединенный с поршнем. Остальные вибровозбудители в этом случае служат только для создания жесткого соединения фланца упругой вставки с фундаментом. С помощью датчиков вибрации 2 измеряют скорость вибрации поршня.
При выполнении измерений входных импедансов ![]() (
( может принимать значения
,
,
,
,
или
) трехкомпонентные датчики сил, установленные между входным фланцем и пьезоэлектрическими вибровозбудителями, позволяют измерять силы, действующие на фундамент через входной фланец,
при возбуждении объемной скорости
движущимся поршнем. Для осесимметричных упругих вставок отличными от нуля являются только элементы
![]() .
.
При выполнении измерений переходных механоакустических импедансов ![]() трехкомпонентные датчики сил 11, установленные между выходным фланцем и фундаментом, позволяют измерять силы, действующие на фундамент через выходной фланец
трехкомпонентные датчики сил 11, установленные между выходным фланцем и фундаментом, позволяют измерять силы, действующие на фундамент через выходной фланец . Моменты сил измеряют с помощью пар датчиков силы. Для осесимметричных упругих вставок отличными от нуля являются только элементы
![]() .
.
На испытательной установке, показанной на рисунке 9, можно выполнять измерения акустомеханических импедансов при воздействии на входной фланец силой, направленной вдоль оси вставки (когда возбуждается только осевая вибрация фланца ), а также при воздействии на входной фланец моментов сил относительно осей
и
(когда возбуждаются только угловые составляющие вибрации фланца
и
. При выполнении измерений акустомеханических импедансов управляющий сигнал подают на пьезоэлектрические вибровозбудители, соединенные с фланцем. Пьезоэлектрический вибровозбудитель, соединенный с поршнем, служит для создания жесткого соединения поршня с фундаментом для выполнения граничного условия равенства нулю объемной скорости жидкости на входе вставки. С помощью четырех датчиков вибрации 13, ориентированных вдоль оси упругой вставки, измеряют составляющие скорости вибрации фланца.
Угловые скорости вибрации фланца и
измеряют с помощью пар датчиков вибрации.
При выполнении измерений входных акустомеханических импедансов ![]() (
( может принимать значения
,
,
,
,
или
) звуковое давление
измеряют с помощью гидрофона, установленного во входной камере. Для осесимметричных упругих вставок отличными от нуля являются только элементы
![]() .
.
При выполнении измерений переходных акустомеханических импедансов ![]() звуковое давление
звуковое давление измеряют с помощью гидрофона, установленного в выходной камере. Для осесимметричных упругих вставок отличными от нуля являются только элементы
![]() .
.
В случае упругих вставок, не обладающих осевой симметрией, при воздействии на входной фланец поперечных сил в испытательных установках, реализованных по схемам, приведенным на рисунке 7, навстречу друг другу размещают две или более номинально идентичные упругие вставки с входными и выходными камерами для измерения звукового давления.
Для измерения акустомеханических импедансов упругих вставок, не обладающих осевой симметрией, при воздействии на входной фланец момента сил относительно оси упругой вставки, в испытательных установках, реализованных по схемам, приведенным на рисунках 6 и 7, навстречу друг другу размещают две номинально идентичные гибкие вставки с входными и выходными камерами для измерения звукового давления.
На рисунке 10 дан пример испытательной установки для измерений переходных акустомеханических импедансов упругих вставок при воздействии момента сил относительно оси вставки, и сил, направленных вдоль осей и
. При измерении входных акустомеханических импедансов упругих вставок при воздействии момента сил относительно оси вставки, и сил в направлении осей
и
на этой испытательной установке монтируют дополнительно измерительные камеры звукового давления между промежуточным фланцем 1 и входными фланцами упругой вставки.
|
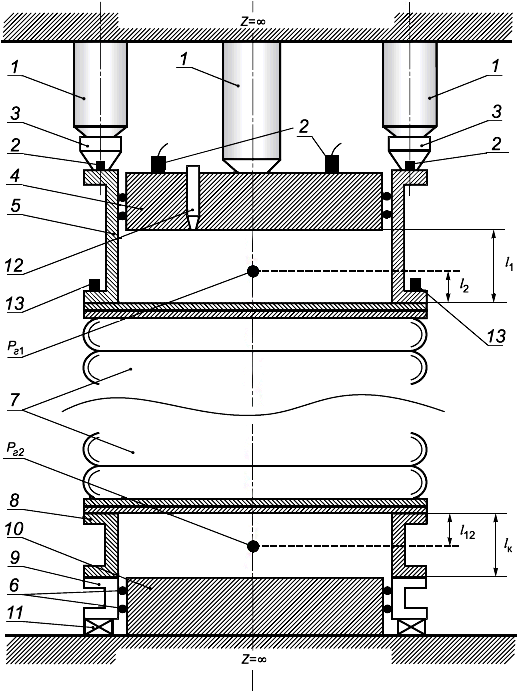
1 - пьезоэлектрический вибровозбудитель; 2 - датчик вибрации; 3 - датчик силы в импедансной головке; 4 - поршень на входе установки; 5 - корпус входной камеры; 6 - упругие кольца; 7 - упругая вставка; 8 - корпус выходной камеры; 9 - промежуточный фланец; 10 - поршень на выходе установки; 11 - датчик силы; 12 - устройство для выпуска воздуха; 13 - датчики вибрации; ,
- гидрофоны во входной и выходной камерах
Рисунок 9 - Пример испытательной установки для измерений акустических, механических, акустомеханических и механоакустических импедансов упругих вставок
|
1 - промежуточный фланец; 2 - входные фланцы гибкой вставки; 3, 6 - датчики вибрации; 4, 7 - датчики силы; 5 - вибровозбудитель поперечной вибрации; 8 -вибровозбудители для возбуждения поперечных и угловых колебаний; 9 - испытуемые упругие вставки; 10 - измерительная камера; 11 - поршень; 12 - промежуточная конструкция; 13 - уплотнительные кольца; 14 - датчик силы; 15 - гидрофон выходной измерительной камеры
Рисунок 10 - Пример испытательной установки для измерений механических и переходных акустомеханических импедансов при воздействии поперечных сил и моментов
9 Неопределенность измерений
9.1 Общие положения
Неопределенность измерений элементов матрицы импедансов в значительной степени зависит от вида испытательной установки, условий испытаний, процедуры обработки результатов измерений, что не позволяет привести единый метод ее расчета. Пользователь настоящего стандарта должен самостоятельно выполнить данный расчет, руководствуясь ГОСТ Р 54500.3 и ГОСТ Р 54500.3.1 и используя рекомендации настоящего раздела в отношении учета существенных источников неопределенности.
Необходимо иметь в виду, что получить достаточно низкие значения неопределенности измерений можно только при строгом контроле многочисленных влияющих факторов, что возможно при высокой квалификации специалистов, проводящих испытания. При соблюдении указанных требований можно ожидать, что расширенная относительная неопределенность измерений при коэффициенте охвата, равном двум, для большинства испытательных установок не превысит 30%.
9.2 Факторы, влияющие на неопределенность измерений
9.2.1 Определение измеряемой величины
Элементы матрицы импедансов являются частотными характеристиками, т.е. непрерывными функциями частоты, в то время как измерения выполняют в конечном числе точек этой характеристики. Поэтому результат измерений будет зависеть от ширины полосы частот, соответствующей каждой точке.
Определение измеряемой величины включает в себя также определение нормальных условий работы упругой вставки, к которым должны быть приведены результаты измерений. Нормальные условия измерений задает изготовитель.
Чтобы оценить поправки, вносимые условиями окружающей среды, рекомендуется проводить измерения при разных сочетаниях условий окружающей среды (температуры воздуха, относительной влажности, атмосферного давления) и эксплуатационных параметров (температуры упругой вставки, температуры жидкости, давления в гидросистеме) в диапазоне их изменения.
9.2.2 Инструментальная неопределенность
9.2.2.1 Общие положения
Инструментальная неопределенность является составляющей неопределенности любых измерений и обусловлена неидеальностью измерительной системы и испытательного оборудования. Инструментальная неопределенность зависит от метода испытания (возбуждение в узкой или широкой полосе частот) и способов обработки сигнала. В число факторов, определяющих инструментальную неопределенность, входят:
- неопределенность калибровки датчиков вибрации, датчиков силы, гидрофонов и измерительной цепи в целом;
- места расположения датчиков вибрации, датчиков силы и гидрофонов;
- влияние установленных измерительных преобразователей на физические процессы в упругой вставке и испытательной установке;
- неидентичность измерительных каналов;
- неидеальность воспроизведения требуемого возбуждения испытательным оборудованием.
Ниже приводятся рекомендации по измерениям физических величин, на основе которых рассчитывают значения элементов матрицы импедансов, и средствам их обработки. Эти рекомендации, с одной стороны, основаны на современном уровне развития измерительных технологий и, в то же время, согласованы с уровнем других, не инструментальных источников неопределенности, что позволяет избежать необоснованно высоких требований к средствам измерений.
9.2.2.2 Измерения вибрации
В качестве датчиков вибрации используют акселерометры с последующим интегрированием выходного сигнала для получения сигнала скорости. Динамический диапазон акселерометра зависит от диапазона ускорений вибрации в условиях применения упругой вставки. Амплитудно-частотная характеристика акселерометра (вместе с предусилителем и устройством интегрирования сигнала) должна быть постоянной в диапазоне частот от 2 Гц до 5 кГц в пределах допуска ±0,5 дБ.
Результаты измерений вибрации в соответствии с настоящим стандартом чувствительны к фазовым искажениям сигналов. Поэтому необходимо убедиться, что фазовые искажения, вносимые датчиком вибрации, минимальны.
9.2.2.3 Измерения силы
Динамический диапазон датчика силы зависит от диапазона значений вынуждающих сил в условиях применения упругой вставки. Амплитудно-частотная характеристика датчика силы должна быть постоянной в диапазоне частот от 2 Гц до 5 кГц в пределах допуска ±0,5 дБ.
Результаты измерений силы в соответствии с настоящим стандартом чувствительны к фазовым искажениям сигналов. Поэтому необходимо убедиться, что фазовые искажения, вносимые датчиком силы, минимальны.
9.2.2.4 Измерения звукового давления в жидкости
Измерения звукового давления в жидкости выполняют с помощью гидрофонов. Амплитудно-частотная характеристика гидрофона должна быть постоянной в диапазоне частот от 2 Гц до 5 кГц в пределах допуска ±0,5 дБ.
Результаты измерений звукового давления в соответствии с настоящим стандартом чувствительны к фазовым искажениям сигналов. Поэтому необходимо убедиться, что фазовые искажения, вносимые гидрофоном, минимальны.
9.2.2.5 Измерения объемной скорости жидкости
Как правило, объемную скорость жидкости измеряют не непосредственно, а через измерения скоростей вибрации поршня и фундамента при известной площади поршня, неопределенность измерения которой считают пренебрежимо малой. Требования к датчикам вибрации установлены в 9.2.2.2. Вместе с тем, поскольку на результаты измерений объемной скорости жидкости оказывают влияние большее число факторов, точность таких измерений будет ниже точности измерений вибрации.
9.2.2.6 Возбуждаемая вибрация
Вибровозбудитель должен обеспечить однонаправленное движение в диапазоне от 10 до 1000 Гц. Коэффициент нелинейных искажений должен быть не более 3%. Поперечная и угловая вибрации не должны превышать 5% вибрации в направлении возбуждения.
9.2.2.7 Многоканальный анализатор
Многоканальный анализатор должен обеспечивать одновременную обработку силовых и кинематических параметров, т.е. иметь не менее двух каналов. Диапазон частот измерений - от 0 до 20 кГц. Неидентичность каналов не должна превышать 0,1° по фазовому сдвигу и ±1% по амплитуде.
9.2.3 Другие источники неопределенности
В число источников неопределенности, не относящихся к инструментальной неопределенности, но вносящих сравнительный и даже больший вклад в суммарную неопределенность, относятся:
- отклонение от нормальных условий работы вставки;
- случайные факторы (включая фоновый шум), изменяющиеся от измерения к измерению и характеризующие повторяемость условий измерений;
- неопределенность, присущая методу испытаний (разность частотных характеристик двух номинально идентичных упругих вставок, конечность размеров измерительных камер);
- неопределенность, связанная с установкой испытуемых объектов (точностью их позиционирования в испытательной установке);
- неопределенность, связанная с испытательной установкой (конечной жесткостью испытательной установки в разных направлениях движения в области контакта с испытуемым объектом, отклонения траекторий движения элементов испытательной установки от идеальных, движение номинально неподвижных частей испытательной установки);
- неопределенность, связанная с отклонением измеряемой частотной характеристики от линейности.
Некоторые рекомендации по оценке неопределенностей данных видов можно найти в ГОСТ ИСО 10846-2*.
________________
* Вероятно, ошибка оригинала. Следует читать ГОСТ Р ИСО 10846-2-2010. - .
Приложение А
(справочное)
Полная матрица импедансов осесимметричной упругой вставки
Для осесимметричной упругой вставки большинство элементов матрицы импедансов обращается в нуль, и в общем случае такая матрица имеет вид
|
Библиография
[1] | Попков В.И., Попков С.В. Колебания механизмов и конструкций. - СПб, "Сударыня", 2009. - 490 с. |
УДК 534.322.3.08:006.354 | ОКС 17.140.01 |
Ключевые слова: вибрация, упругие вставки, механический импеданс, акустический импеданс, механоакустический импеданс, акустомеханический импеданс, измерения | |
Электронный текст документа
и сверен по:
, 2019
{kind=link}