ГОСТ ISO 6395-2014
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Машины землеройные
ОПРЕДЕЛЕНИЕ УРОВНЯ ЗВУКОВОЙ МОЩНОСТИ
Испытания в динамическом режиме
Earth-moving machinery. Determination of sound power level. Dynamic test conditions
МКС 17.140.20; 53.100
Дата введения 2025-01-01
Предисловие
Цели, основные принципы и общие правила проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Научно-производственным республиканским унитарным предприятием "Белорусский государственный институт стандартизации и сертификации" (БелГИСС) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 5
2 ВНЕСЕН Государственным комитетом по стандартизации Республики Беларусь
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 20 октября 2014 г. № 71-П)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по МК (ИСО 3166) 004-97 | Сокращенное наименование национального органа по стандартизации |
Армения | AM
| ЗАО "Национальный орган по стандартизации и метрологии" Республики Армения |
Беларусь | BY
| Госстандарт Республики Беларусь |
Казахстан | KZ
| Госстандарт Республики Казахстан |
Киргизия | KG
| Кыргызстандарт |
Молдова | MD
| Молдова-Стандарт |
Россия | RU | Росстандарт |
Таджикистан | TJ | Таджикстандарт |
4 Приказом Федерального агентства по техническому регулированию и метрологии от 24 января 2024 г. № 52-ст межгосударственный стандарт ГОСТ ISO 6395-2014 введен в действие в качестве национального стандарта Российской Федерации с 1 января 2025 г.
5 Настоящий стандарт идентичен международному стандарту ISO 6395:2008* "Машины землеройные. Определение уровня звуковой мощности. Испытания в динамическом режиме" ("Earth-moving machinery - Determination of sound power level - Dynamic test conditions", IDT).
Международный стандарт разработан подкомитетом SC 2 "Требования техники безопасности и эргономики" технического комитета по стандартизации ISO/TC 127 "Машины землеройные" при сотрудничестве с подкомитетом SC 1 "Шум" технического комитета ISO/TC 43 "Акустика" Международной организации по стандартизации (ISO).
Сведения о соответствии ссылочных международных стандартов межгосударственным стандартам приведены в дополнительном приложении ДА
6 ВЗАМЕН ГОСТ 28975-91 (ИСО 6395-88)
Информация о введении в действие (прекращении действия) настоящего стандарта и изменений к нему на территории указанных выше государств публикуется в указателях национальных стандартов, издаваемых в этих государствах, а также в сети Интернет на сайтах соответствующих национальных органов по стандартизации.
В случае пересмотра, изменения или отмены настоящего стандарта соответствующая информация будет опубликована на официальном интернет-сайте Межгосударственного совета по стандартизации, метрологии и сертификации в каталоге "Межгосударственные стандарты"
Введение
Настоящий стандарт является идентичным ISO 6395:2008.
Настоящий стандарт устанавливает специальную методику испытаний землеройных машин по ISO 6165.
При этом используется не фактический цикл работы, а имитируются динамические режимы при испытании. Имитация динамических режимов при испытании обеспечивает воспроизводимые и репрезентативные данные об излучении шума. Испытания в режиме фактического цикла работы являются довольно сложными, и поэтому получение воспроизводимых результатов может быть затруднено.
В настоящем стандарте рассматриваются конкретные процедуры, позволяющие моделировать излучение шума в испытательном динамическом режиме и получить воспроизводимые результаты измерения уровня звуковой мощности. Испытания необходимо проводить с установленным навесным оборудованием изготовителя (ковш, отвал и т.д.), поскольку в реальных условиях машина будет работать именно с таким оборудованием.
Настоящий стандарт может применяться при оценке соответствия предельно допустимым значениям уровня шума, если применимо. Он также может быть использован в исследовательских работах для оценки уровня шума с целью его снижения.
В ISO 6396 приводится описание дополнительной методики испытаний. Эта специальная методика испытаний предназначена для определения эквивалентного уровня звукового давления на рабочем месте оператора в динамическом режиме испытания землеройных машин.
Методики измерения шума, излучаемого в окружающую среду, и шума на рабочем месте оператора в стационарных режимах испытаний приведены в ISO 6393 и ISO 6394 соответственно.
1 Область применения
Настоящий стандарт устанавливает метод определения шума, передаваемого окружающей среде движущимися механизмами землеройных машин и измеряемого как эквивалентный уровень звуковой мощности, при работе машины в динамическом режиме испытаний.
Стандарт распространяется на землеройные машины по ISO 6165, указанные в приложении А.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты [для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения)]:
ISO 3744:2010 Acoustics - Determination of sound power levels and sound energy levels of noise sources using sound pressure - Engineering method for an essentially free field over a reflecting plane (Акустика. Определение уровней звуковой мощности и уровней звуковой энергии источников шума по звуковому давлению. Технические методы в условиях свободного звукового поля над отражающей поверхностью)
ISO 6165:2012 Earth-moving machinery - Basic types - Vocabulary (Машины землеройные. Основные типы. Идентификация, термины и определения)
ISO 6393:2008 Earth-moving machinery - Determination of sound power level - Stationary test conditions (Машины землеройные. Определение уровня звуковой мощности. Испытания в стационарном режиме)
ISO 9249:2007 Earth-moving machinery - Engine test code - Net power (Машины землеройные. Правила испытаний двигателей. Полезная мощность)
IEC 61672-1:2013 Electroacoustics - Sound level meters - Part 1: Specifications (Электроакустика. Измерители уровня звука. Часть 1. Требования)
3 Термины и определения
В настоящем стандарте применены термины по ISO 3744, ISO 6165, а также следующие термины с соответствующими определениями:
3.4 центральная точка машины (machine centre point):
3.4.2 центральная точка машины (machine centre point) (для машин с поворотной платформой): Центр вращения поворотной платформы.
3.5 частота вращения вентилятора (fan speed):
3.5.1 максимальная рабочая частота вращения вентилятора (maximum working speed of the fan): Частота вращения вентилятора, при которой вентилятор обеспечивает максимальную эффективность охлаждения машины в самых тяжелых условиях эксплуатации.
3.5.2 привод вентилятора с бесступенчатым регулированием частоты вращения вентилятора (fan drive with continuous variable fan speed): Привод вентилятора, который изменяет частоту вращения вентилятора во всех диапазонах непрерывно в бесступенчатом режиме с целью минимизации частоты вращения вентилятора для получения необходимой эффективности охлаждения по отношению к тепловой нагрузке.
4 Средства измерений
Средства измерений должны обеспечивать измерения, указанные в разделе 8. Предпочтительным измерительным оборудованием для сбора соответствующих данных является интегрирующий-усредняющий шумомер, соответствующий требованиям IEC 61672-1 для приборов класса точности 1.
5 Условия измерений
5.1 Общие положения
Для целей настоящего стандарта применяют условия измерений, указанные в ISO 3744 (раздел 4 и приложение А). Дополнительные требования приведены в 5.2-5.5.
Влажность, температура воздуха, атмосферное давление, уровни вибраций и характеристики магнитных полей рассеяния должны находиться в пределах, указанных изготовителем средств измерений.
5.3 Испытательная площадка
5.3.1 Общие положения
Допускается проводить измерения на испытательных площадках с тремя видами покрытий (см. 5.3.2-5.3.4):
a) твердая звукоотражающая плоскость (с цементобетонным или непористым асфальтобетонным покрытием);
b) сочетание твердой звукоотражающей плоскости и песка;
c) песчаная площадка.
Твердую звукоотражающую плоскость, как описано в 5.3.2, используют для испытаний машин следующих типов:
- машины пневмоколесные (любой режим работы);
- экскаваторы (любой режим работы);
- гусеничные погрузчики (стационарный гидравлический режим работы);
- дорожные катки (любой режим работы).
Сочетание твердой звукоотражающей плоскости и песка, как описано в 5.3.3, используют для испытаний дорожных катков с рифленой рабочей поверхностью и для уплотняющих машин.
Сочетание твердой отражающей плоскости и песка, как описано в 5.3.3, или песчаной площадки, как описано в 5.3.4, используют для гусеничных машин (например, гусеничных бульдозеров, гусеничных погрузчиков, гусеничных землевозов и т.д.) в режиме передвижения своим ходом и в стационарных режимах с работой гидрооборудования при соблюдении следующих условий:
5.3.2 Твердая звукоотражающая плоскость
Испытательная площадка, по краям которой установлены микрофоны, должна иметь цементобетонное или непористое асфальтобетонное покрытие.
5.3.3 Сочетание твердой звукоотражающей плоскости и песка
На полосе движения машины должно быть предусмотрено покрытие из влажного песка с крупностью зерен до 2 мм. Слой песка должен быть толщиной не менее 0,3 м. Если при толщине слоя песка 0,3 м не происходит погружения гусениц, толщину следует соответственно увеличить. Поверхность грунта между машиной и микрофоном должна представлять собой твердую звукоотражающую плоскость, как описано в 5.3.2.
Минимальные размеры комбинированной площадки могут быть достигнуты при использовании звукоотражающей плоскости с песчаной полосой, устроенной с одной стороны. В этом случае для каждой из трех измерительных положений микрофона машину прогоняют передним ходом дважды (в противоположных направлениях). То же можно повторить и для режима передвижения задним ходом.
5.3.4 Песчаная площадка
Песчаное покрытие должно соответствовать требованиям, приведенным в 5.3.3.
Требования к фоновому шуму должны соблюдаться, как указано в ISO 3744. Коррекцию на фоновый шум выполняют, как указано в ISO 3744 (пункт 8.3.2).
5.5 Метеорологические условия
Не допускается проводить измерения при следующих условиях:
a) во время выпадения осадков, т.е. дождя, снега или града;
b) на площадке, покрытой снегом;
c) при температурах ниже минус 10°С или выше плюс 35°С;
d) при скорости ветра свыше 8 м/с. Если скорость ветра превышает 1 м/с, применяют микрофон с ветрозащитным козырьком, влияние которого учитывают при калибровке.
6 Измерение эквивалентных уровней звукового давления излучения
6.1 Размеры измерительной поверхности
Радиус полусферы выбирают равным:
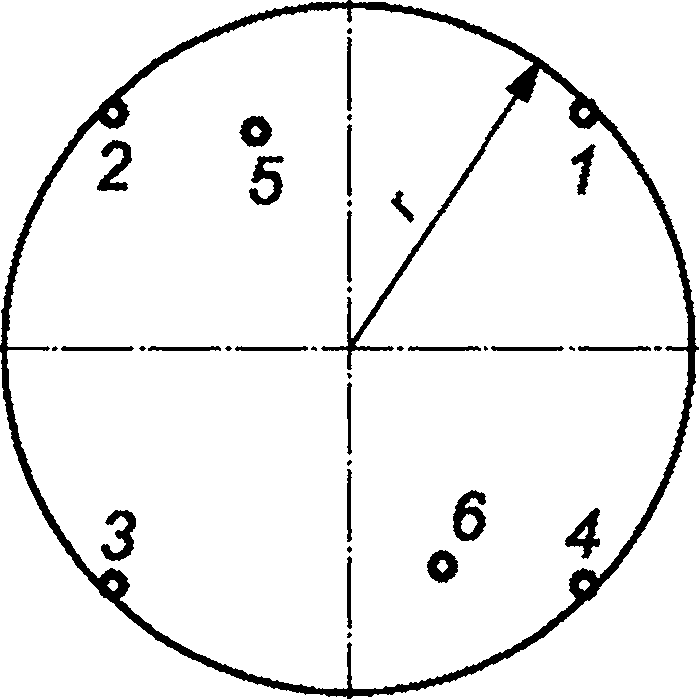
6.2 Расположение микрофонов на полусферической измерительной поверхности
Используют шесть измерительных точек. Расположение микрофонов и их координаты должны быть, как показано на рисунке 1 и приведено в таблице 1.
Размеры в метрах
 |
1-6 - расположение микрофонов; r - радиус полусферы
Рисунок 1 - Установка микрофонов на полусфере
Таблица 1 - Координаты расположения микрофонов
Положение микрофона | x/r | y/r | z, м |
1 | 0,7 | 0,7 | 1,5 |
2 | -0,7 | 0,7 | 1,5 |
3 | -0,7 | -0,7 | 1,5 |
4 | 0,7 | -0,7 | 1,5 |
5 | -0,27 | 0,65 | 0,71 r |
6 | 0,27 | -0,65 | 0,71 r |
6.3 Установка машины в рабочее положение
В зависимости от типа машины измерения выполняют:
- в режиме движения;
- в режиме стационарного рабочего цикла; или
- в сочетании этих двух режимов.
Установка машины в рабочее положение и ее работа установлены в приложениях B-L.
6.3.1 Режим движения
Полоса движения машины показана на рисунке 2. Ось полосы движения машины должна совпадать с осью x и с продольной осью симметрии машины.
Длина полосы движения АВ должна быть в 1,4 раза больше радиуса полусферы. Движение машины передним ходом осуществляется в направлении от точки А к точке В, движение задним ходом - от точки В к точке А.
6.3.2 Режим стационарного рабочего цикла
Продольная ось машины должна совпадать с осью x, передняя часть машины должна быть обращена в направлении точки B. Центральную точку машины приблизительно совмещают с центром полусферы С, указанным на рисунке 2. Установка машины в рабочее положение и ее работа в соответствии с приложениями B-L.
 |
1-6 - расположение микрофонов; 7 - ось полосы движения; A, B и C - точки на полосе движения; r - радиус полусферы; a - зона измерения шума =1,4 r
Рисунок 2 - Полоса движения машины
7 Установка и работа машины
7.1 Общие положения
7.1.1 Безопасность работы
При испытаниях должны соблюдаться все соответствующие меры безопасности и инструкции по эксплуатации изготовителя.
Сигнальные устройства, такие как передний предупредительный звуковой сигнал или звуковой сигнал заднего хода, не должны быть активными во время испытаний.
7.1.2 Установка машины
Машина должна быть оснащена рабочим оборудованием и сменным оборудованием, предусмотренными изготовителем машины. Двигатель и гидравлическая система должны быть разогреты до нормальных рабочих условий, установленных изготовителем машины.
Все жидкостные системы должны быть заполнены в пределах, указанных изготовителем.
7.2 Частота вращения двигателя
Частота вращения двигателя должна быть установлена на максимальное значение без нагрузки, как указано изготовителем машины.
7.3 Частота вращения вентилятора
Если двигатель машины или ее гидравлическая система оснащены вентилятором(ами), то они должны работать при испытаниях. Частота вращения вентилятора должна соответствовать одному из следующих указанных условий, устанавливаемых изготовителем машины.
a) Привод вентилятора непосредственно от двигателя
Если привод вентилятора напрямую подключен к двигателю и/или гидравлическому оборудованию (например, ременный привод), он должен работать при испытаниях.
b) Привод вентилятора с несколькими различными частотами вращения
Если вентилятор может работать на нескольких различных частотах вращения, испытание должно проводиться:
- либо при максимальной рабочей частоте вращения вентилятора, либо
c) Привод вентилятора с бесступенчатым регулированием частоты вращения вентилятора
Если вентилятор может работать с частотой вращения, регулируемой бесступенчато, испытание должно проводиться либо в соответствии с 7.3, перечисление b), либо с частотой вращения вентилятора не менее 70% от максимальной рабочей частоты вращения, установленной изготовителем.
d) Машина, оснащенная более чем одним вентилятором
Все вентиляторы должны работать с учетом перечислений a), b) или c).
7.4 Работа машины в режиме движения
Полоса движения машины должна соответствовать установленному в 6.3.1 и показанному на рисунке 2. Для гусеничных машин полоса движения должна представлять собой песчаную площадку, а для колесных машин с резиновыми шинами - твердую звукоотражающую плоскость, как указано в 5.3.2. Работа машины должна соответствовать приложениям B-L.
Машина должна работать с рабочим оборудованием или сменным оборудованием в транспортном положении [на высоте (300±50) мм над полосой перемещения] и с максимальной частотой вращения двигателя (максимальные обороты холостого хода) при постоянной скорости переднего и заднего хода. Для машин с сидящим оператором скорость движения передним ходом должна быть близка, но не превышать 4 км/ч для гусеничных машин и машин со стальными колесами и 8 км/ч - для колесных машин с резиновыми шинами. С соответствующим соотношением скоростей движения выбирают передачу в режиме движения задним ходом. Для большинства машин это будет соответствовать первой передаче переднего хода и первой передаче заднего хода. Машины с гидростатическим приводом допускается испытывать в диапазоне скоростей от 3,5 до 4 км/ч для гусеничных машин или машин со стальными колесами и от 7 до 8 км/ч - для машин с резиновыми шинами вследствие возможных трудностей при установке органов управления скоростью движения машины в положение, необходимое для получения точной скорости движения.
Для машин, управляемых рядом идущим оператором, скорость движения передним ходом не должна превышать 6 км/ч, а скорость движения задним ходом не должна превышать 2,5 км/ч.
Эти режимы работы должны использоваться безостановочно при пересечении полусферы в обоих направлениях, без перемещения рабочего оборудования или сменного оборудования, если не установлено иное. Если самая низкая передача дает скорость выше заданной скорости, то она должна использоваться при работе двигателя на максимальной ограниченной регулятором частоте вращения (максимальные обороты холостого хода). Для машин с гидростатическим приводом при работе двигателя с максимальной ограниченной регулятором частотой вращения (максимальные обороты холостого хода) органы управления скоростью должны быть настроены в соответствии с вышеуказанными заданными скоростями. Уровень звукового давления следует измерять только в то время, когда центральная точка машины находится на полосе движения между точками А и В, указанными на рисунке 2.
Оператору рекомендуется корректировать движение машины по испытательной трассе, чтобы не отклоняться от осевой линии полосы движения.
Выполняют три отдельных цикла движения передним и задним ходом в соответствии с 8.1.
8 Определение эквивалентного уровня звуковой мощности
8.1 Процедура измерений
Эквивалентный уровень звуковой мощности определяют в соответствии с ISO 3744.
Для каждого режима работы, как определено в приложениях B-L для каждого конкретного семейства машин, эквивалентный уровень звукового давления излучения измеряют во всех положениях микрофонов (предпочтительно одновременно) не менее трех раз.
На основании этих измерений рассчитывают уровни звуковой мощности (не менее трех значений) в соответствии с 8.2 для комбинированного рабочего цикла (см. приложения B-L) конкретной машины семейства.
Для обеспечения соответствия требованиям 8.3 могут потребоваться измерения для дополнительных режимов работы. Указания по проведению измерений шума приведены в приложении М.
8.2 Расчет эквивалентного уровня звуковой мощности

N - общее число положений микрофонов (N=6);
Все промежуточные результаты, такие как уровни звукового давления и расчет площади, должны быть выражены с точностью до одной десятой.
8.3 Обработка результатов измерений
Вычисляют три значения эквивалентного уровня звуковой мощности по трем наборам данных, полученных для каждого положения микрофона (см. 8.1).
Если два из трех значений, полученных таким вычислением, отличаются друг от друга не более чем на 1 дБ, то продолжать измерения не требуется. В противном случае измерения продолжают до тех пор, пока не получат два значения с разницей не более 1 дБ. Включаемый в протокол эквивалентный уровень звуковой мощности определяют как среднее арифметическое двух наибольших значений, отличающихся друг от друга не более чем на 1 дБ.
9 Регистрируемая информация
В соответствии с настоящим стандартом для всех выполненных измерений должна быть составлена и зарегистрирована следующая информация, если она используется:
а) Испытуемая машина:
- изготовитель машины;
- номер модели машины;
- серийный номер машины;
- тип системы (систем) привода вентилятора, используемый метод(ы) испытания, как указано в 7.3, перечисления a), b) или c), в том числе соответствующая максимальная частота вращения вентилятора и частота(ы) вращения вентилятора, используемая(ые) в ходе испытаний для каждого вентилятора;
- компоновка машины, включая основное рабочее и сменное оборудование, максимальная частота вращения двигателя, ограниченная регулятором (максимальные обороты холостого хода), частота вращения вентилятора и передаточные числа трансмиссии или установка органов управления;
- полезная мощность двигателя в киловаттах при номинальной частоте вращения по ISO 9249.
b) Акустические условия измерений:
- описание испытательной площадки и типа используемой(ых) измерительной(ых) поверхности(ей), включая схему, показывающую положение машины;
- температура воздуха, барометрическое давление, относительная влажность воздуха и скорость ветра на испытательной площадке.
c) Средства измерений:
- средства, используемые для акустических измерений, включая наименование, тип, серийный номер, изготовителя;
- метод, используемый для калибровки измерительной системы;
- дата и место калибровки измерительной системы.
d) Акустические данные:
- расположение микрофонов;
- эквивалентный уровень звукового давления излучения в каждом положении микрофона для каждого измерения, выполненного в соответствии с 8.1;
- эквивалентный уровень звукового давления фонового шума в каждом положении микрофона;
- эквивалентный уровень звукового давления, усредненный по измерительной поверхности, рассчитанный в соответствии с 8.2 для каждого режима работы, как определено в приложениях B-L;
- окончательное значение эквивалентного уровня звуковой мощности, рассчитанное в соответствии с 8.2 и определенное в соответствии с 8.3.
10 Информация, включаемая в протокол испытаний
10.1 Информация
В протокол испытаний должна быть включена следующая информация:
a) изготовитель машины, номер модели, серийный номер, полезная мощность двигателя (в киловаттах при номинальной частоте вращения по ISO 9249), компоновка машины, включая основное рабочее и сменное оборудование, и используемый тип поверхности испытательной площадки;
b) эквивалентный уровень звуковой мощности, определенный в соответствии с 8.3, округленный до ближайшего целого числа (если цифра после запятой меньше 5, то используют ближайшее меньшее целое число; если цифра после запятой равна или больше 5, то используют ближайшее большее целое число);
c) максимальная частота вращения двигателя ограниченная регулятором (максимальные обороты холостого хода), когда машина неподвижна и трансмиссия установлена в нейтральное положение;
d) тип системы (систем) привода вентилятора, используемый(ые) метод(ы) испытания, как указано в 7.3, перечисления a), b) или c), в том числе соответствующая максимальная частота вращения вентилятора и частота(ы) вращения вентилятора, используемая(ые) при испытаниях для каждого вентилятора;
e) уровень топлива в топливном баке и, если применимо, уровень воды в резервуаре(ах) для смачивания вальцов и уровень в балластном отделении(ях).
10.2 Заявление звукового излучения и параметров неопределенности
На некоторых рынках применяются дополнительные требования, перечисленные в приложении N. Заявление звукового излучения и параметров неопределенности, если применимо, должно быть представлено в соответствии с приложением N.
Приложение А
(обязательное)
А.1 Бульдозеры
А.1.1 Гусеничный бульдозер
См. рисунок А.1.
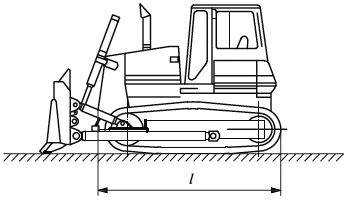 |
Рисунок А.1
А.1.2 Колесный бульдозер
См. рисунок А.2.
 |
Рисунок А.2
А.2 Погрузчики
А.2.1 Колесный погрузчик
Колесный погрузчик с эксплуатационной массой более 4500 кг. См. рисунок А.3.
 |
Рисунок А.3
А.2.2 Колесный мини-погрузчик
Колесный погрузчик с эксплуатационной массой не более 4500 кг. См. рисунок А.4.
 |
Рисунок А.4
А.2.3 Гусеничный погрузчик
См. рисунок А.5.
 |
Рисунок А.5
А.2.4 Погрузчик с бортовым поворотом
См. рисунок А.6.
 |
Рисунок А.6
А.3 Экскаватор-погрузчик
А.3.1 Колесный экскаватор-погрузчик
См. рисунок А.7.
 |
Рисунок А.7
А.3.2 Гусеничный экскаватор-погрузчик
См. рисунок А.8.
 |
Рисунок А.8
А.4. Экскаваторы
А.4.1 Колесный экскаватор
См. рисунок А.9.
 |
Рисунок А.9
А.4.2 Гусеничный экскаватор
См. рисунок А.10.
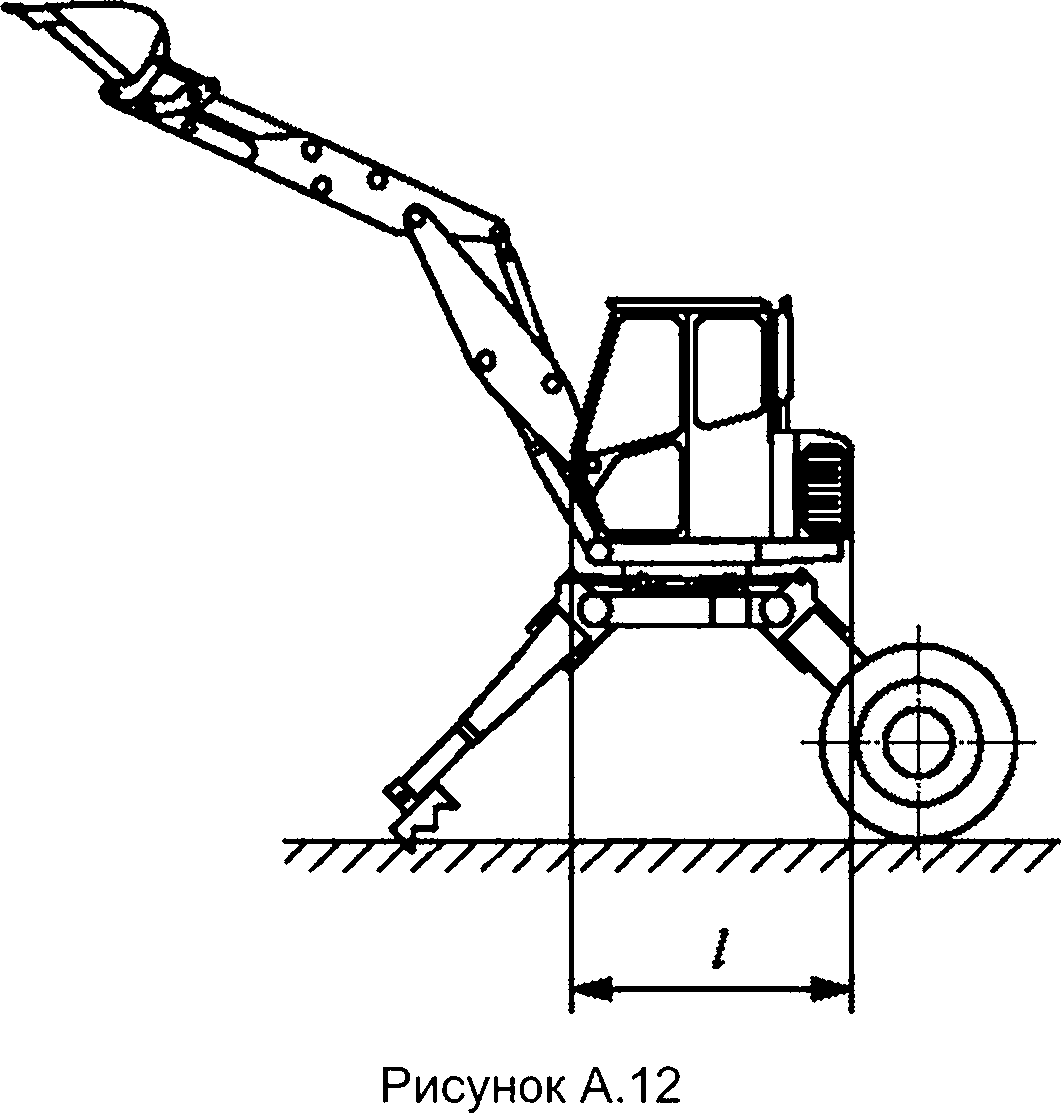 |
Рисунок А.10
А.4.3 Мини-экскаватор
Экскаватор с эксплуатационной массой не более 6000 кг. См. рисунок А.11.
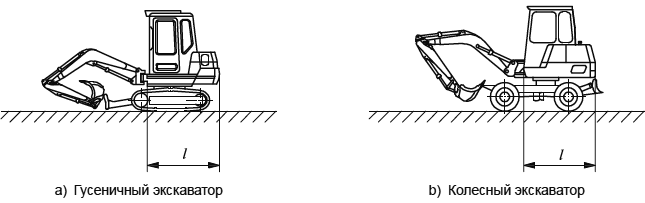 |
Рисунок А.11
А.4.4 Шагающий экскаватор
См. рисунок А.12.
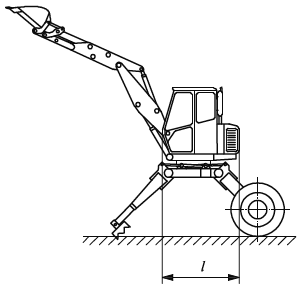 |
Рисунок А.12
А.5 Землевозы
А.5.1 Колесный землевоз с жесткой рамой
См. рисунок А.13
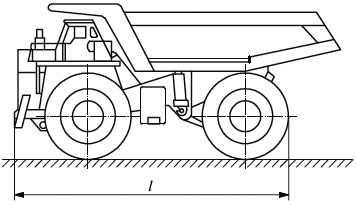 |
Рисунок А.13
А.5.2 Землевоз с шарнирно-сочлененной рамой
См. рисунок А.14.
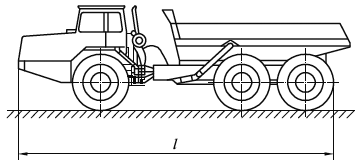 |
Рисунок А.14
А.5.3 Гусеничный землевоз
См. рисунок А.15.
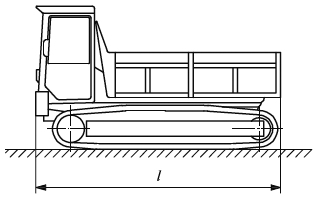 |
Рисунок А.15
А.5.4 Малогабаритный колесный землевоз
Колесный землевоз с эксплуатационной массой не более 4500 кг. См. рисунок А.16.
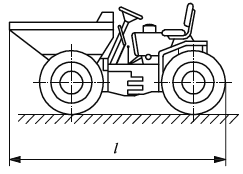 |
Рисунок А.16
А.5.5 Малогабаритный гусеничный землевоз
Гусеничный землевоз с эксплуатационной массой не более 4500 кг. См. рисунок А.17.
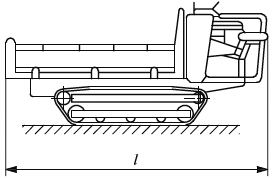 |
Рисунок А.17
А.6 Скреперы
А.6.1 Скрепер с одним двигателем
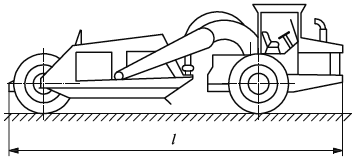 |
Рисунок А.18
А.6.2 Скрепер с двумя двигателями
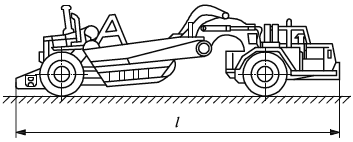 |
Рисунок А.19
А.6.3 Гусеничный скрепер
См. рисунок А.20.
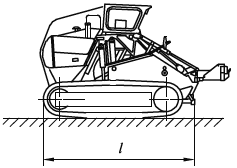 |
Рисунок А.20
А.7 Автогрейдер
См. рисунок А.21.
 |
Рисунок А.21
А.8 Трубоукладчик
См. рисунок А.22.
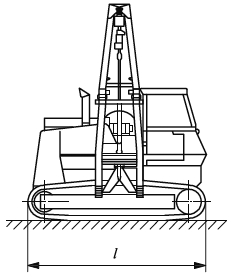 |
Рисунок А.22
А.9 Траншеекопатели
А.9.1 Самоходный колесный траншеекопатель
См. рисунок А.23.
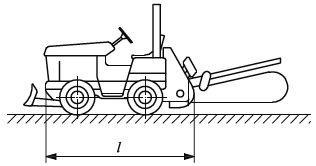 |
Рисунок А.23
А.9.2 Самоходный гусеничный траншеекопатель
См. рисунок А.24.
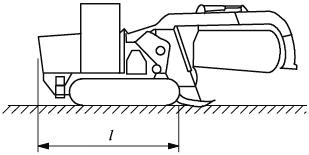 |
Рисунок А.24
А.9.3 Траншеекопатель, управляемый рядом идущим оператором
См. рисунок А.25.
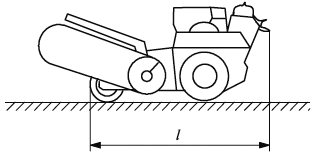 |
Рисунок А.25
А.9.4 Дисковый траншеекопатель
См. рисунок А.26.
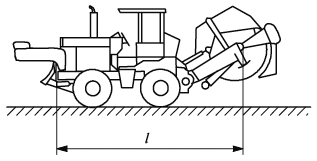 |
Рисунок А.26
А.10 Уплотняющие машины
А.10.1 Уплотняющая машина с погрузочным оборудованием
См. рисунок А.27.
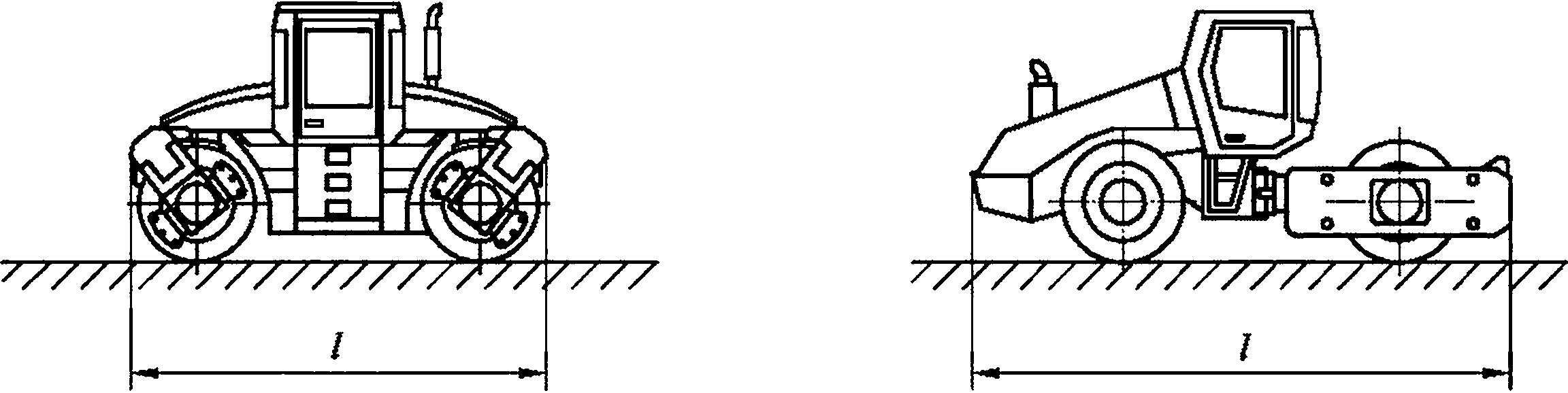 |
Рисунок А.27
А.10.2 Уплотняющая машина с бульдозерным оборудованием
См. рисунок А.28.
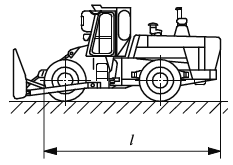 |
Рисунок А.28
А.11 Дорожные катки
См. рисунок А.29.
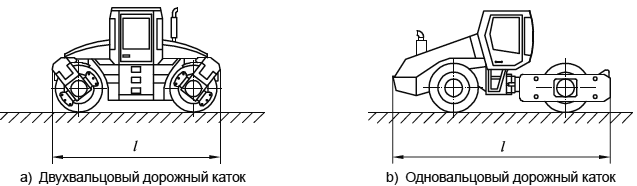 |
Рисунок А.29
Приложение В
(обязательное)
Экскаваторы (гидравлические или канатные)
B.1 Определение термина
Определение термина экскаватор приведено в ISO 6165.
B.2 Измерительная поверхность и установка машины в рабочее положение
Машина должна быть установлена в рабочее положение, как указано в 6.3.2. Центральная точка экскаватора является центром вращения поворотной платформы.
Измерительная поверхность должна быть такой, как указано в 5.3.2.
B.3 Установка машины
Установка машины должна выполняться, как указано в разделе 7. Все рабочие движения должны выполняться с максимальной скоростью, но без срабатывания предохранительных клапанов или удара о механические упоры-ограничители.
B.4 Работа машины
B.4.1 Основной цикл машины
Машина, установленная по 6.3.2, выполняет динамический цикл без перемещения материала, как описано в В.4.2-В.4.5 (приложение В), совершая три поворота на 90° в левую (относительно оператора) сторону и обратно.
Каждый поворот выполняется от оси x до оси у и обратно до оси х. Один цикл состоит из трех выполняемых подряд без перерывов поворотов на 90° влево и обратно, при этом фронтальное сменное оборудование выполняет всю последовательность операций в течение каждого поворота на 90° и обратно.
B.4.2 Экскаваторы с обратной лопатой
Динамический цикл имитирует рытье траншеи с отсыпкой материала в прилегающей зоне. В начале цикла стрела и рукоять должны находиться в таком положении, чтобы ковш был выдвинут на 75% максимального вылета и находился как можно ближе к поверхности площадки, но не соприкасался с нею. Плоскость режущей кромки ковша, повернутого вперед от рукояти, должна быть наклонена под углом 60° к поверхности испытательной площадки.
Сначала выполняют подъем стрелы с одновременным втягиванием рукояти при сохранении неизменной высоты ковша над уровнем площадки до момента, пока стрела с рукоятью не пройдет 50% своей траектории. Затем ковш поворачивают или заворачивают к рукояти. После этого имитируют перенос ковша через кромку траншеи, для чего ковш поднимают с помощью стрелы на достаточную высоту (30% максимальной высоты подъема) при продолжающемся втягивании рукояти. Далее вращают поворотную часть экскаватора на 90° влево относительно оператора, одновременно поднимают стрелу и выдвигают рукоять до тех пор, пока ковш не займет положение, соответствующее 60% максимальной высоты подъема стрелы. Перемещение рукояти продолжают до тех пор, пока она не пройдет 75% своего хода. После этого ковш поворачивают или отворачивают от рукояти до того момента, пока плоскость режущей кромки не примет вертикальное положение. Далее выполняют обратное вращение поворотной части экскаватора в исходное положение с одновременным опусканием стрелы и поворотом ковша вовнутрь.
Указанную последовательность операций выполняют еще два раза, чтобы получить один динамический цикл.
B.4.3 Экскаватор с прямой лопатой
Рабочий цикл имитирует разработку высокого забоя. В начале цикла ковш должен находиться на высоте 0,5 м над уровнем испытательной площадки в положении, при котором рукоять втянута на 75% своего хода, а плоскость режущей кромки ковша параллельна поверхности площадки.
Сначала ковш выдвигают вперед на 75% хода с сохранением первоначальной ориентации ковша в пространстве. Затем ковш запрокидывают в сторону рукояти и поднимают его на 75% максимальной высоты подъема и на 75% выдвигания рукояти. Выполняют поворот на 90° влево от оператора и в конце поворота включают механизм разгрузки ковша. Далее выполняют обратное вращение поворотной части в исходное положение с установкой ковша на высоте 0,5 м над испытательной площадкой при втягивании рукояти на 75% хода.
Указанную последовательность операций выполняют еще два раза, чтобы получить один динамический цикл.
B.4.4 Экскаватор с грейферным ковшом
Рабочий цикл имитирует разработку котлована. В начале цикла раскрытый грейфер должен находиться на высоте 0,5 м над уровнем испытательной площадки.
Первой ориентацией является замыкание челюстей грейфера, после чего его поднимают до половины максимальной высоты. Выполняют вращение поворотной части машины на 90° влево от оператора. Открывают челюсти грейфера. Выполняют обратное вращение поворотной части с одновременным опусканием грейфера в исходное положение.
Указанную последовательность операций выполняют еще два раза, чтобы получить один динамический цикл.
Для мини-экскаваторов грейфер должен находиться на высоте как можно ближе к поверхности испытательной площадки, но не соприкасаться с нею.
B.4.5 Экскаватор с драглайном
Рабочий цикл имитирует послойную разработку траншеи с отсыпкой материала в прилегающей зоне. В течение всего цикла стрела должна иметь угол наклона 40°. Ковш должен вертикально свисать с конца стрелы на высоте 0,5 м над уровнем испытательной площадки, не касаясь ее цепями.
Первой операцией является подтягивание ковша как можно ближе к машине с удержанием его на высоте 0,5 м над испытательной площадкой. После втягивания ковша выполняют вращение поворотной части машины на 90° влево от оператора. Далее выполняют разгрузку ковша и его возврат в исходное положение.
Указанную последовательность операций выполняют еще два раза, чтобы получить один динамический цикл.
Приложение C
(обязательное)
Бульдозеры
C.1 Определение термина
Определение термина бульдозер приведено в ISO 6165.
C.2 Измерительная поверхность и установка машины в рабочее положение
Машина должна быть установлена в рабочее положение, как указано в 6.3.1.
Измерительная поверхность должна быть такой, как указано в 5.3.2 для колесных бульдозеров и как указано в 5.3.3 или 5.3.4 для гусеничных бульдозеров.
С.3 Установка машины
Установка машины должна выполняться, как указано в разделе 7.
C.4 Работа машины
C.4.1 Режим работы
Режим работы машины должен соответствовать режиму, указанному в разделе 7.
C.4.2 Расчет для комбинированного режима движения передним и задним ходом
Приложение D
(обязательное)
Погрузчики
D.1 Определение термина
Определение термина погрузчик приведено в ISO 6165.
D.2 Измерительная поверхность и установка машины в рабочее положение
Машина должна быть установлена в рабочее положение, как указано в 6.3.1 для режима движения и как указано в 6.3.2 для режима стационарного рабочего цикла.
Измерительная поверхность должна быть такой, как указано в 5.3.2 для колесных погрузчиков и как указано в 5.3.3 или 5.3.4 для гусеничных погрузчиков.
D.3 Установка машины
Установка машины должна выполняться, как указано в разделе 7.
Все рабочие движения должны выполняться с максимальной скоростью, но без срабатывания предохранительных клапанов или удара о механические упоры-ограничители.
D.4 Работа машины
D.4.1 Общие положения
Динамический цикл представляет собой комбинацию режимов движения и стационарного рабочего цикла.
D.4.2 Режим движения
D.4.2.1 Режим работы
Режим работы машины должен выполняться, как указано в разделе 7.
D.4.2.2 Расчет для режима движения
D.4.3 Режим стационарного рабочего цикла
Двигатель должен работать с максимальной ограниченной регулятором частотой вращения (высокие обороты холостого хода). Орган управления трансмиссией должен быть установлен в нейтральное положение. Ковш из транспортного положения поднимают на 75% максимальной высоты подъема, а затем опускают в транспортное положение, эта операция выполняется три раза. Такая последовательность действий считается одним циклом для стационарного гидравлического режима.
D.4.4 Расчет для комбинированного режима движения и стационарного рабочего цикла
Приложение E
(обязательное)
Экскаваторы-погрузчики
E.1 Определение термина
Определение термина экскаватор-погрузчик приведено в ISO 6165.
E.2 Измерительная поверхность и установка машины в рабочее положение
Машина должна быть установлена в рабочее положение, как указано в 6.3.1 для режима движения и как указано в 6.3.2 для режима стационарного рабочего цикла.
Измерительная поверхность должна быть такой, как указано в 5.3.2 для колесных экскаваторов-погрузчиков и как указано в 5.3.3 или 5.3.4 для гусеничных экскаваторов-погрузчиков.
E.3 Установка машины
Установка машины должна выполняться, как указано в разделе 7. Для работы обратной лопаты-погрузчика частота вращения двигателя должна быть установлена в значение, указанное изготовителем.
Все рабочие движения должны выполняться с максимальной скоростью, но без срабатывания предохранительных клапанов или удара о механические упоры-ограничители.
E.4 Работа машины
E.4.1 Общие положения
Динамический цикл представляет собой сочетание режима движения и стационарного рабочего цикла в режиме погрузчика машины и режима рабочего цикла в режиме обратной лопаты.
E.4.2 Режим погрузчика. Режимы движения и стационарного рабочего цикла
Выполняют режим работы погрузчика в соответствии с методикой, описанной в D.4 (приложение D), при этом ковш экскаватора должен находиться в транспортном положении.
E.4.3 Режим экскаватора. Режим стационарного рабочего цикла
Испытание машины в режиме экскаватора выполняют в соответствии с методикой, описанной в B.4.1 и B.4.2 (приложение B), только вместо каждого поворота на 90° оборудование поворачивают на 45°.
E.4.4 Расчет для комбинированного режима экскаватора и погрузчика
Приложение F
(обязательное)
Землевозы
F.1 Определение термина
Определение термина землевоз приведено в ISO 6165.
F.2 Измерительная поверхность и установка машины в рабочее положение
Машина должна быть установлена в рабочее положение, как указано в 6.3.1 для режима движения и как указано в 6.3.2 для режима стационарного рабочего цикла.
Измерительная поверхность должна быть такой, как указано в 5.3.2 для колесных землевозов и как указано в 5.3.3 или 5.3.4 для гусеничных землевозов.
F.3 Установка машины
Установка машины должна выполняться, как указано в разделе 7.
Все рабочие движения должны выполняться с максимальной скоростью, но без срабатывания предохранительных клапанов или удара о механические упоры-ограничители.
F.4 Работа машины
F.4.1 Общие положения
Динамический цикл представляет собой сочетание режима движения и стационарного рабочего цикла.
F.4.2 Режим движения
Измерения выполняют только для режима движения передним ходом.
Скорость движения должна быть такой, как указано в 7.4. Если скорость движения, указанная в 7.4, не может быть достигнута, то используют при испытании максимальную скорость первой передачи коробки передач.
F.4.3 Режим стационарного рабочего цикла
Двигатель должен работать с максимальной ограниченной регулятором частотой вращения (высокие обороты холостого хода). Орган управления трансмиссией должен быть установлен в нейтральное положение. Кузов землевоза из транспортного положения поднимают на 75% максимального положения разгрузки, а затем возвращают в транспортное положение, эта операция выполняется три раза. Такая последовательность действий считается одним циклом для режима стационарного рабочего цикла. Если мощность двигателя не используется для разгрузки кузова, двигатель должен работать с минимальной ограниченной регулятором частотой вращения (низкие обороты холостого хода), с органом управления трансмиссией, установленным в нейтральное положение. Измерения выполняют без разгрузки кузова, период наблюдения составляет 15 с.
F.4.4 Режим стационарного рабочего цикла на низких оборотах холостого хода
Двигатель должен работать с минимальной ограниченной регулятором частотой вращения (низкие обороты холостого хода) в установившемся режиме при отсутствии нагрузки. Орган управления трансмиссией должен быть установлен в нейтральное положение. Общее время измерений должно быть от 15 до 30 с. Эта последовательность действий считается одним циклом для режима стационарных низких оборотов холостого хода.
F.4.5 Расчет для комбинированного режима движения, стационарного рабочего цикла и стационарного рабочего цикла на низких оборотах холостого хода
Приложение G
(обязательное)
Автогрейдеры
G.1 Определение термина
Определение термина автогрейдер приведено в ISO 6165.
G.2 Измерительная поверхность и установка машины в рабочее положение
Машина должна быть установлена в рабочее положение, как указано в 6.3.1.
Измерительная поверхность должна быть такой, как указано в 5.3.2.
G.3 Установка машины
Установка машины должна выполняться, как указано в разделе 7.
G.4 Работа машины
Измерения выполняют только для режима движения передним ходом.
Скорость движения должна быть такой, как указано в разделе 7.
Приложение H
(обязательное)
Уплотняющие машины
H.1 Определение термина
Определение термина уплотняющая машина приведено в ISO 6165.
H.2 Измерительная поверхность и установка машины в рабочее положение
Машина должна быть установлена в рабочее положение, как указано в 6.3.1.
Измерительная поверхность должна быть такой, как указано в 5.3.2 или 5.3.3.
H.3 Установка машины
Установка машины должна выполняться, как указано в разделе 7.
Для упрощения рабочей процедуры уплотняющая машина может быть подвергнута испытаниям с резиновыми шинами, пригодными для выполнения испытаний на твердой поверхности. Если машины испытывают с соответствующими стальными колесами, то должна использоваться измерительная поверхность, как определено в 5.3.3 или 5.3.4.
H.4 Работа машины
H.4.1 Общие положения
Режим работы машины должен выполняться, как указано в разделе 7.
Если скорость движения, указанная в 7.4, не может быть достигнута, то рекомендуется использовать максимальную скорость первой передачи коробки передач.
H.4.2 Расчет для режима движения
Приложение I
(обязательное)
Траншеекопатели
I.1 Определение термина
Определение термина траншеекопатель приведено в ISO 6165.
I.2 Измерительная поверхность и установка машины в рабочее положение
Машина должна быть установлена в рабочее положение, как указано в 6.3.2.
Измерительная поверхность должна быть такой, как указано в 5.3.2.
I.3 Установка машины
Установка машины должна выполняться, как указано в разделе 7.
Стрела цепного траншеекопателя должна находиться в горизонтальном положении.
Диск должен быть расположен как можно ближе к поверхности грунта.
I.4 Работа машины
I.4.1 Режим стационарного рабочего цикла цепного траншеекопателя
Приводной механизм для вращения режущей цепи цепного траншеекопателя должен работать с максимальной рекомендуемой рабочей частотой вращения при снятой режущей цепи.
Общее время измерения составляет от 15 до 30 с. Эта последовательность рассматривается как один цикл.
I.4.2 Режим стационарного рабочего цикла дискового траншеекопателя
Диск должен функционировать при отсутствии нагрузки с максимальной рекомендуемой рабочей частотой вращения.
Общее время измерения составляет от 15 до 30 с. Эта последовательность рассматривается как один цикл.
Приложение J
(обязательное)
Скреперы
J.1 Определение термина
Определение термина скрепер приведено в ISO 6165.
J.2 Измерительная поверхность и установка машины в рабочее положение
Машина должна быть установлена в рабочее положение, как указано в 6.3.1 для движения передним ходом и как указано в 6.3.2 для движения задним ходом.
Измерительная поверхность должна быть такой, как указано в 5.3.2 для колесных скреперов и как указано в 5.3.3 и 5.3.4 для гусеничных скреперов.
J.3 Установка машины
Установка машины должна выполняться, как указано в разделе 7.
Все рабочие движения должны выполняться с максимальной скоростью, но без срабатывания предохранительных клапанов или удара о механические упоры-ограничители.
J.4 Работа машины
J.4.1 Общие положения
Динамический цикл представляет собой сочетание режимов движения и стационарного рабочего цикла.
J.4.2 Режим движения
Работа машины должна осуществляться, как указано в 6.3.1, но в режиме движения передним ходом.
При наличии у скреперов двух двигателей машина должна работать с обоими двигателями на максимальной ограниченной регулятором частоте вращения двигателя (высокие обороты холостого хода).
J.4.3 Режим стационарного рабочего цикла скрепера
J.4.3.1 Скрепер без элеваторной загрузки
Двигатель(и) должен(ны) работать с максимальной ограниченной регулятором частотой вращения (высокие обороты холостого хода) с органом управления трансмиссией в нейтральном положении.
Задняя стенка ковша должна перемещаться вперед от задней точки в переднее положение, затем возвращаться в заднее положение без удара с упорами. Эта операция выполняется три раза.
Такая последовательность действий рассматривается как один цикл для режима стационарного рабочего цикла.
J.4.3.2 Скрепер с элеваторной загрузкой
Двигатель(и) должен(ны) работать с максимальной ограниченной регулятором частотой вращения (высокие обороты холостого хода) с органом управления трансмиссией в нейтральном положении.
Элеватор должен работать на 50% своей максимальной частоте вращения.
Общее время измерения составляет от 15 до 30 с. Эта последовательность рассматривается как один цикл для режима стационарного рабочего цикла.
J.4.4 Расчет для комбинированного режима движения и стационарного рабочего цикла
Приложение K
(обязательное)
Трубоукладчики
K.1 Определение термина
Определение термина трубоукладчик приведено в ISO 6165.
K.2 Измерительная поверхность и установка машины в рабочее положение
Машина должна быть установлена в рабочее положение, как указано в 6.3.2.
Измерительная поверхность должна быть такой, как указано в 5.3.2 для колесных трубоукладчиков и как указано в 5.3.3 и 5.3.4 для гусеничных трубоукладчиков.
K.3 Установка машины
Установка машины должна выполняться, как указано в разделе 7.
K.4 Работа машины
K.4.1 Общие положения
Динамический цикл трубоукладчика в его типовом применении представляет собой только режим стационарного рабочего цикла.
K.4.2 Режим стрелы
Стрела должна быть перемещена три раза из самого низкого допустимого положения до максимального положения подъема без механического удара в упоры. Эта последовательность действий принимается за один цикл и повторяется три раза, чтобы соответствовать требованиям трех рабочих циклов, как указано в 8.1.
K.4.3 Режим перемещения крюка
Стрела должна находиться в максимальном положении подъема, а скорость перемещения каната должна иметь максимальное значение нижнего диапазона.
Крюк поднимают три раза из самого нижнего к поверхности грунта положения до его максимальной высоты подъема без механического удара в упоры. Эта последовательность действий принимается за один цикл и повторяется три раза, чтобы соответствовать требованиям трех рабочих циклов, как указано в 8.1.
K.4.4 Режим работы на низких оборотах холостого хода
Двигатель должен работать с минимальной ограниченной регулятором частотой вращения (низкие обороты холостого хода) в установившемся режиме без нагрузки. Орган управления трансмиссией должен быть установлен в нейтральное положение. Общее время измерения составляет от 15 до 30 с.
Эта последовательность действий принимается за один цикл для стационарного режима работы на низких оборотах холостого хода.
K.4.5 Расчет для комбинированного режима стационарного рабочего цикла
Приложение L
(обязательное)
Самоходные дорожные катки
L.1 Определение термина
Определение термина дорожный каток приведено в ISO 6165.
Настоящее приложение может также использоваться для определения эквивалентного уровня звуковой мощности дорожных катков, управляемых рядом идущим оператором, и дорожных катков с дистанционным управлением.
L.2 Вибрационные дорожные катки
L.2.1 Измерительная поверхность и установка машины в рабочее положение
Машина должна быть установлена в рабочее положение, как указано в 6.3.2.
Вибрационный каток должен быть установлен на одном или нескольких соответствующих упругих материалах, таких как воздушная(ые) подушка(и). Воздушные подушки должны быть изготовлены из гибкого материала (эластомера или аналогичного материала) и должны быть накачаны до давления, обеспечивающего подъем машины на высоту не менее 50 мм; резонанса следует избегать. Размеры подушки(ек) должны быть такими, чтобы обеспечивалась устойчивость испытуемой машины.
Измерительная поверхность должна быть такой, как указано в 5.3.2.
L.2.2 Установка машины
Установка машины должна выполняться, как указано в 7.1-7.3.
L.2.3 Работа машины
Машину испытывают в стационарном положении при работе двигателя на номинальной частоте вращения (указанной изготовителем) и при отключенном приводе движения. Уплотняющий механизм должен работать с использованием максимальной мощности уплотнения, соответствующей сочетанию максимальной частоты и максимальной амплитуды для этой частоты, указанных изготовителем.
Период наблюдения должен быть не менее 15 с для одного цикла. Этот цикл повторяют три раза, чтобы соответствовать требованиям трех рабочих циклов, как указано в 8.1.
L.3 Статические дорожные катки
L.3.1 Измерительная поверхность и установка машины в рабочее положение
Машина должна быть установлена в рабочее положение, как указано в ISO 6393:2008 (пункт 6.3.1).
Измерительная поверхность должна быть такой, как указано в 5.3.2 или 5.3.3 для статических дорожных катков с рифленой рабочей поверхностью.
L.3.2 Установка машины
Установка машины должна соответствовать указаниям, приведенным в ISO 6393:2008 (раздел 7).
L.3.3 Работа машины
Режим работы машины должен быть стационарным, как указано в ISO 6393:2008 (пункт 7.1.3).
L.3.4 Определение эквивалентного уровня звуковой мощности
Эквивалентный уровень звуковой мощности определяют в соответствии с требованиями ISO 6393:2008 (раздел 8).
Приложение M
(справочное)
Дополнительные рекомендации для измерения эквивалентного уровня звуковой мощности землеройных машин. Условия динамических испытаний
M.1 Цель
Рекомендации, изложенные в настоящем приложении, направлены на оказание помощи по снижению различий в циклах испытаний путем предоставления конкретных рекомендаций в областях, которые изначально не рассматривались, для предоставления экспертному персоналу разумной степени гибкости. Эти рекомендации призваны дать более четкие инструкции операторам, не обладающим значительными практическими навыками в применении соответствующих методик, как дополнения к методам испытаний, приведенным в настоящем стандарте.
M.2 Пояснения к 8.1 "Процедура измерений"
Как указано в 6.2, существует шесть измерительных точек. Для того чтобы минимизировать вариацию, необходимо использовать шесть комплектов измерительных приборов и должны быть две группы специалистов-испытателей с одним оператором машины. Минимальная подготовка для официального испытания на соответствие требованиям всегда должна предусматривать по крайней мере три комплекта инструментов, одного испытателя и одного оператора. Должно быть организовано мультиплексное переключение или удлинительный кабель, с тем чтобы все измерительные приборы могли быть выключены и включены одновременно, или дополнительный персонал испытателей, соответствующий количеству используемых шумомеров.
Должны быть заданы три измерительные точки таким образом, чтобы измерения проводились с одной стороны машины во время выполнения каждого элемента цикла. Для измерений с другой стороны машины может быть либо изменено положение машины, либо переустановлены микрофоны на другую сторону.
Крайне важно, чтобы либо оператор машины, либо оператор измерительного прибора имел в своем распоряжении простую и понятную ручную сигнальную систему, способную предупреждать о том, что машина находится на пути тестового измерения между стартовой и финишной линиями.
Важно понимать, что эта процедура требует применения шумомеров или приборов с возможностью измерения эквивалентного уровня звукового давления. Любой другой подход, который требует нескольких отдельных показаний во время выполнения элемента цикла, не является приемлемой методикой. В разделе 8 приведена конкретная информация, необходимая для выполнения окончательного расчета.
Ключевой целью является достижение повторяемости показаний измерений в каждом положении для исключения необходимости повторения целого ряда циклических испытаний, которые могут понадобиться, если окончательные расчеты выявляют широкое расхождение значений эквивалентного уровня звуковой мощности. Процедура измерения эквивалентного уровня звукового давления излучения не менее трех раз с получением разности между двумя измерениями не более 1 дБ позволяет повторить испытания в другое время или на подобной машине и получить приемлемые сопоставимые результаты.
Приложение N
(обязательное)
Заявление звукового излучения и параметров неопределенности
В случае необходимости предоставления заявления звукового давления и параметров неопределенности (например, соответствие обязательным требованиям) должны выполняться следующие требования.
При определении значения эквивалентного уровня звуковой мощности учитывают параметр неопределенности измерений и в случае изготовления серии (партии) машин параметр неопределенности, обусловленный нестабильностью процесса производства.
Максимальное значение стандартного отклонения воспроизводимости измерений эквивалентного уровня звуковой мощности составляет 1,5 дБ в соответствии с ISO 3744 (таблица 2). Определение термина стандартное отклонение воспроизводимости измерений - в соответствии с ISO 4871:1996 (пункт 3.21) (повторное применение одного и того же метода определения уровня шума, излучаемого одним и тем же источником в разные периоды времени и при различных условиях).
Рекомендации о заявлении значений звукового излучения приведены в ISO 4871:1996 (приложение А).
Эквивалентный уровень звуковой мощности и соответствующий ему параметр неопределенности измерения необходимо заявлять по отдельности (заявление двухчислового значения шумовой характеристики), как показано, например, в ISO 4871:1996 (приложение В, раздел В.2), или можно использовать другие формы заявления.
Примечание 1 - Опытные данные в целом показывают, что значение стандартного отклонения воспроизводимости измерений эквивалентного уровня звуковой мощности находится в пределах от 0,5 до 0,8 дБ.
Примечание 3 - Информация, приведенная в примечаниях 1 и 2, основана на опытах, соответствующих европейскому законодательству (например, Директиве 2000/14/ЕС).
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов межгосударственным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
ISO 3744:2010 | - | * |
ISO 6165:2012 | IDT | ГОСТ ISO 6165-2015 "Машины землеройные. Основные типы. Идентификация, термины и определения" |
ISO 6393:2008 | MOD | ГОСТ 27717-88 (ИСО 6393-85) "Акустика. Измерение воздушного шума, излучаемого землеройными машинами. Метод проверки соответствия нормативным требованиям по внешнему шуму. Испытания в стационарном режиме" |
ISO 9249:2007 | IDT | ГОСТ ISO 9249-2017 "Машины землеройные. Методы испытания двигателей. Полезная мощность" |
IEC 61672-1:2013 | - | * |
* Соответствующий межгосударственный стандарт отсутствует. Примечание - В настоящей таблице использованы следующие условные обозначения степени соответствия стандартов: - IDT - идентичные стандарты; - MOD - модифицированный стандарт. | ||
Библиография
[1] | ISO 4871:1996 | Acoustics - Declaration and verification of noise emission values of machinery and equipment |
(Акустика. Заявление и контроль значений шумовых характеристик машин и оборудования) | ||
[2] | ISO 6394:2008 | Earth-moving machinery - Determination of emission sound pressure level at the operator’s position - Stationary test conditions |
(Машины землеройные. Определение уровня звукового давления излучения на рабочем месте. Испытания в стационарном режиме) | ||
[3] | ISO 6396:2008 | Earth-moving machinery - Determination of emission sound pressure level at operator’s position - Dynamic test conditions |
(Машины землеройные. Определение уровня звукового давления излучения на рабочем месте. Испытания в динамическом режиме) | ||
[4] | Directive 2000/14/EC of the European Parliament and of the Council of 8 May 2000 on the approximation of the laws of the Member States relating to the noise emission in the environment by equipment for use outdoors | |
(Директива Европейского парламента и Совета от 8 мая 2000 г. относительно сближения законодательств государств-членов, касающихся уровня шума оборудования, используемого вне помещений) | ||
УДК 621.878/.879:629.36.054.25(083.74)(476) | МКС 17.140.20; 53.100 | IDT |
Ключевые слова: машины землеройные, эквивалентный уровень звуковой мощности, эквивалентный уровень звукового давления, динамический режим, испытания | ||
{kind=link}