ГОСТ EN 1005-4-2013
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Безопасность машин
ФИЗИЧЕСКИЕ ВОЗМОЖНОСТИ ЧЕЛОВЕКА
Часть 4
Положение тела при работе с машинами и механизмами
Safety of machinery. Human physical performance. Part 4: Evaluation of working postures and movements in relation to machinery
МКС 13.110
13.180
Дата введения 2015-01-01
Предисловие
Цели, основные принципы и общие правила проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Экспериментальным научно-исследовательским институтом металлорежущих станков (ОАО "ЭНИМС") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 5
2 ВНЕСЕН Федеральным агентством по техническому регулированию и метрологии
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 5 ноября 2013 г. N 61-П)
За принятие стандарта проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по МК (ИСО 3166) 004-97 | Сокращенное наименование национального органа по стандартизации |
Армения | AM | Минэкономики Республики Армения |
4 Приказом Федерального агентства по техническому регулированию и метрологии от 13 марта 2014 г. N 134-ст межгосударственный стандарт ГОСТ EN 1005-4-2013 введен в действие в качестве национального стандарта Российской Федерации с 1 января 2015 г.
5 Настоящий стандарт идентичен европейскому стандарту EN 1005-4:2005+А1:2008* "Безопасность машин. Физические возможности человека. Часть 4. Оценка рабочих поз и движений относительно машины" ("Safety of machinery - Human physical performance - Part 4: Evaluation of working postures and movements in relation to machinery", IDT), подготовленному Техническим комитетом CEN/TK 122 "Эргономика".
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
При применении настоящего стандарта рекомендуется использовать вместо ссылочных европейских стандартов соответствующие им межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
6 ВВЕДЕН ВПЕРВЫЕ
7 ПЕРЕИЗДАНИЕ. Октябрь 2019 г.
Информация о введении в действие (прекращении действия) настоящего стандарта и изменений к нему на территории указанных выше государств публикуется в указателях национальных стандартов, издаваемых в этих государствах, а также в сети Интернет на сайтах соответствующих национальных органов по стандартизации.
В случае пересмотра, изменения или отмены настоящего стандарта соответствующая информация будет опубликована на официальном интернет-сайте Межгосударственного совета по стандартизации, метрологии и сертификации в каталоге "Межгосударственные стандарты"
Введение
Настоящий стандарт является продолжением серии стандартов ЕН 1005, охватывающей различные аспекты физических возможностей людей, работа которых связана с машинами, и соответствует основным требованиям безопасности директив Европейского союза и связанных с ними норм EFTA.
По данным Европейского союза, по крайней мере одна треть операторов машин вынуждена принимать рабочие позы, вызывающие болевые ощущения или повышенную утомляемость в течение более чем половины своего рабочего дня. Это относится и к 50% всех работающих, которым приходится выполнять короткие повторяющиеся движения [2].
Боль и усталость могут привести к скелетно-мускульному расстройству, снижению производительности труда, ухудшению контроля над положением и движениями оператора. Последнее может приводить к возникновению опасных ситуаций, увеличению риска ошибок, к ухудшению качества выпускаемой продукции.
В течение жизненного цикла машины (от проектирования до демонтажа) все связанные с машиной действия требуют определенных рабочих поз и движений. Задачей конструктора должно быть исключение рабочих поз и движений, вызывающих болевые ощущения или повышенную утомляемость в процессе эксплуатации машины.
Требования настоящего стандарта направлены на снижение рисков для здоровья оператора при эксплуатации машины, что приводит в конечном итоге к повышению производительности труда и рентабельности производства, а также к обеспечению качества выпускаемой продукции.
Требования настоящего стандарта базируются на современных научных достижениях в области эргономики и советах специалистов, но могут быть изменены и дополнены в соответствии с будущими научными достижениями [1].
В соответствии с EN 414 настоящий стандарт является стандартом типа В. Положения настоящего стандарта могут быть дополнены или изменены стандартом типа С.
Для машин, которые спроектированы и изготовлены в соответствии с положениями стандарта типа С, положения стандарта типа С являются приоритетными перед положениями стандартов типа В.
Серия стандартов EN 1005 состоит из следующих стандартов под общим названием "Безопасность машин. Физические возможности человека":
- Часть 1. Термины и определения;
- Часть 2. Составляющая ручного труда при работе с машинами и механизмами;
- Часть 3. Рекомендуемые пределы усилий при работе на машинах;
- Часть 4. Оценка рабочих поз и движений относительно машины;
- Часть 5. Оценка риска для действий, повторяющихся с высокой частотой.
1 Область применения
В настоящем стандарте приведены рекомендации по оценке рисков для здоровья операторов и установлены требования для рабочих поз и движений операторов в процессе эксплуатации машины в течение всего ее жизненного цикла, включая монтаж, установку, рабочий процесс, регулировку, техническое обслуживание, очистку, ремонт, транспортирование и демонтаж, которые следует учитывать при проектировании машин или их составных частей.
Настоящий стандарт устанавливает требования для рабочих поз и движений без учета воздействия внешних сил или при минимальном их воздействии. Эти требования должны обеспечивать снижение рисков для здоровья всех операторов.
Настоящий стандарт распространяется на все машины, изготовленные после даты его введения.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты. Для датированных ссылок применяют только указанное издание ссылочного стандарта, для недатированных - последнее издание (включая все изменения).
EN 414, Safety of machinery - Rules for the drafting and presentation of safety standards (Безопасность оборудования. Правила разработки и оформления стандартов по безопасности)
EN 547-1, Safety of machinery - Human body measurement - Part 1: Principles for determining the dimensions required for access for whole body access into machinery (Безопасность машин. Размеры тела человека. Часть 1. Принципы определения размеров проемов, обеспечивающих полный доступ человека к машине)
EN 547-2, Safety of machinery - Human body measurement - Part 2: Principles for determining the dimensions required for access openings (Безопасность машин. Размеры тела человека. Часть 2. Принципы определения размеров проемов для отдельных частей тела человека)
EN 547-3, Safety of machinery - Human body measurements - Part 3: Anthropometric data (Безопасность машин. Размеры тела человека. Часть 3. Антропометрические данные)
EN 614-1, Safety of machinery - Ergonomic principles - Part 1: Terms, definitions and general principles (Безопасность машин и механизмов. Эргономические принципы проектирования. Часть 1. Термины и общие принципы)
EN 894-1, Safety of machinery - Ergonomics requirements for the design of displays and control actuators - Part 1: General principles for human interactions with displays and control actuators (Безопасность машин. Эргономические требования по конструированию средств отображения информации и органов управления. Часть 1. Общие принципы взаимодействия пользователя со средствами отображения информации и органами управления)
EN 894-2, Safety of machinery - Ergonomics requirements for the design of displays and control actuators - Part 2: Displays (Безопасность машин. Эргономические требования по конструированию средств отображения информации и органов управления. Часть 2. Дисплеи)
EN 894-3, Safety of machinery - Ergonomics requirements for the design of displays and control actuators - Part 3: Control actuators (Безопасность машин. Эргономические требования по конструированию средств отображения информации и органов управления. Часть 3. Исполнительные механизмы системы управления)
EN 1005-1:2001, Safety of machinery - Human physical performance - Part 1: Terms and definitions (Безопасность машин. Физические возможности человека. Часть 1. Термины и определения)
EN 1005-2, Safety of machinery - Human physical performance - Part 2: Manual handling of machinery and component parts of machinery (Безопасность машин. Физические возможности человека. Часть 2. Составляющая ручного труда при работе с машинами и механизмами)
EN 1005-3, Safety of machinery - Human physical performance - Part 3: Recommended force limits for machinery operation (Безопасность машин. Физические возможности человека. Часть 3. Рекомендуемые пределы усилий для работы на машинах)
EN 1005-5, Safety of machinery - Human physical performance - Part 5: Risk assessment for repetitive handling at high frequency (Безопасность машин. Физические возможности человека. Часть 5. Оценка риска для действий, повторяемых с высокой частотой)
EN 1050, Safety of machinery - Principles for risk assessment (Безопасность машин. Принципы оценки и определения риска)
EN ISO 12100-1, Safety of machinery - Basic concepts, general principles for design - Part 1: Basic terminology, methodology (ISO 12100-1:2003) (Безопасность машин. Основные понятия, общие принципы конструирования. Часть 1. Основная терминология, методология)
EN ISO 12100-2, Safety of machinery - Basic concepts, general principles for design - Part 2: Technical principles (ISO 12100-2:2003) (Безопасность машин. Основные понятия, общие принципы конструирования. Часть 2. Технические принципы)
EN ISO 14738, Safety of machinery - Anthropometric requirements for the design of workstations at machinery (Безопасность машин. Антропометрические требования к конструкции рабочих мест на/при машинах)
ISO 11226:2000, Ergonomics - Evaluation of static working postures (Эргономика. Оценка статических рабочих поз)
3 Термины и определения
В настоящем стандарте применены термины и определения по EN 1005-1 и EN ISO 12100-1.
4 Требования
4.1 Общие положения
Требования настоящего стандарта согласованы с требованиями EN 1050, EN ISO 12100-1, EN ISO 12100-2 и EN 614-1.
Требования, устанавливаемые настоящим стандартом, следует применять ко всем действиям, связанным с эксплуатацией машин. Однако в отдельных случаях эти требования могут оказаться невыполнимыми. Несмотря на это, требования настоящего стандарта следует учитывать при оценке риска, независимо от того, происходят такие случаи часто или нет, если они могут привести к возрастанию риска возникновения боли, усталости или расстройства здоровья.
Примечание - Требования настоящего стандарта не следует распространять на организацию производства.
Конструкция машины должна обеспечивать оператору разнообразные возможности эксплуатации: в положении сидя, стоя или при хождении вблизи машины. Следует избегать неудобных положений тела и движений (например на коленях, согнувшись). Конструкция машины должна способствовать исключению болезненных и утомительных рабочих поз и частых движений (см. 4.3).
В настоящем стандарте поэтапная оценка риска на основе анализа рабочих поз и движений оператора представлена как часть процесса проектирования машины (рисунок 1).
В настоящем стандарте предусмотрены следующие варианты оценки риска:
- оценка без привлечения операторов с использованием компьютерной графики производится, если нет в наличии полноразмерной модели или полноразмерного прототипа конструируемой машины (см. 4.2.5);
- оценка с привлечением операторов производится, если имеется в наличии полноразмерная модель или полноразмерный прототип конструируемой машины (см. 4.2.6).
В 4.2 приведены основные принципы, которыми следует руководствоваться при оценке риска на различных стадиях конструирования машины, в 4.3 - экспертная оценка риска с последующим определением приемлемости рабочих поз и движений.
Следует обеспечить наиболее полный сбор информации по применению и последствиям использования отдельных конструкций для выполнения соответствующих задач, а также тщательный анализ этой информации для определения, адекватны ли существующие конструкции и практика их применения для выполнения поставленных задач или их следует доработать. Использование конструкций, не прошедших соответствующей проверки, может привести к повышенному риску, преодолевать который смогут только опытные операторы.
|
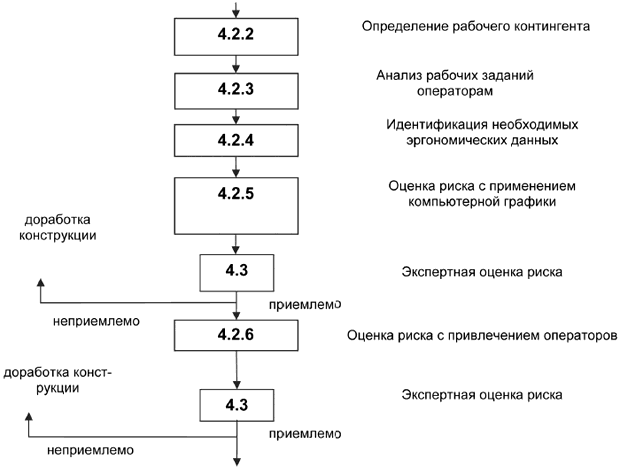
Примечание - Номера в рамках и в тексте полностью соответствуют разделам настоящего стандарта.
Рисунок 1 - Алгоритм оценки риска
4.2 Основные принципы оценки риска
4.2.1 Общие положения
В настоящем стандарте подробно рассмотрены пять основных стадий обеспечения требований эргономики в процессе конструирования (см. 4.2.2-4.2.6 и рисунок 1), описанных в общих чертах в ЕН 614-1.
4.2.2 Определение рабочего контингента
Конструкция машины должна обеспечивать работу в соответствии с требованиями эргономики для всех предполагаемых операторов. Необходимо определить весь диапазон размеров тела для всего контингента потенциальных операторов (общие принципы приведены в EN 614-1).
В 4.2.4-4.2.6 описаны этапы работы по доведению конструкции машины до такого уровня, при котором рабочие позы и движения операторов в процессе эксплуатации машины будут соответствовать приемлемому уровню риска.
4.2.3 Анализ рабочих заданий
Каждое задание, которое требуется выполнить конкретному оператору, должно быть идентифицировано и разбито на отдельные элементы, позволяющие выполнять его в виде серии последовательных действий. От этого зависит решение эргономических задач, описанных в 4.2.4-4.2.6. Кроме того, должны учитываться возможная частота движений и необходимая продолжительность работы с машиной. От этого зависит оценка риска, описанная в 4.3.2-4.3.5.
4.2.4 Идентификация необходимых эргономических данных
При конструировании машин для анализа рабочих поз и движений операторов следует руководствоваться антропометрическими данными, приведенными в EN ISO 14738, т.е. особое внимание следует уделять следующим факторам:
- выбору основной рабочей позы (сидя, стоя, стоя с опорой для ягодиц и т.п.);
- размерным характеристикам машины (необходимое пространство рабочей зоны, высота, наклон рабочей поверхности).
Эти данные сами по себе могут служить только базой для определения благоприятных рабочих поз и движений. На рабочие позы и движения могут оказывать влияние также перечисленные ниже требования, которые следует учитывать на стадии конструирования:
- обеспечение возможности визуальных наблюдений. На позу работающего оказывают неблагоприятное влияние помехи на линии зрения, низкий уровень освещенности, малые размеры объекта наблюдения и малый угол между линией зрения и поверхностью этого объекта. Наблюдение визуального объекта сбоку от оператора, вынуждающее длительное время держать голову повернутой, может приводить к дискомфорту. В вертикальной плоскости наиболее благоприятное направление линии зрения вверх-вниз зависит от положения туловища во время работы, а именно: при наклоне туловища вперед наиболее удобно направление линии зрения "вниз", тогда как при наклоне назад (по отношению к спокойному положению спины) наиболее удобно направление линии зрения "вверх";
- выполнение требований к конструкции и расположению органов управления, приводимых в действие при помощи рук или ног. Неудовлетворительная конструкция и (или) расположение рукоятки, кнопки или педали управления могут оказывать неблагоприятное влияние на рабочую позу и движения оператора, например неудачное расположение оси рукоятки управления может приводить к неудобному подъему плеча;
- обеспечение устойчивости тела оператора при работе. На позу оператора может оказывать неблагоприятное воздействие необходимость удерживать тело или части тела в неудобном положении в процессе эксплуатации машины, например, если при выполнении точной обработки для опоры локтей используется низко расположенная поверхность, оператору приходится чрезмерно наклонять туловище вперед.
Для определения допустимых усилий и соблюдения эргономических требований при конструировании и расположении органов управления и средств отображения информации следует руководствоваться EN 1005-2, EN 1005-3, EN 1005-5, EN 894-1, EN 894-2 и EN 894-3.
4.2.5 Оценка риска с применением компьютерной графики
На ранней стадии проектирования необходимо произвести анализ размеров тела операторов в пределах установленного контингента. При этом следует руководствоваться стандартами (например EN 547-1, EN 547-2, EN 547-3, EN ISO 14738) и моделями формы тела с использованием компьютерной графики.
При использовании компьютерной графики модель тела оператора следует располагать в естественной рабочей позе для имитации выполнения необходимых работ и производить оценку риска в соответствии с 4.3. Если в результате анализа установлено, что конструкция машины не обеспечивает приемлемого уровня риска, конструктор в соответствии с требованиями настоящего стандарта должен вернуться на более раннюю стадию проектирования и доработать конструкцию машины. Эту процедуру следует повторять до тех пор, пока не будет достигнуто полное соответствие конструкции машины требованиям настоящего стандарта. Только после этого можно будет перейти к действиям, описанным в 4.2.6.
4.2.6 Оценка риска с привлечением операторов
После завершения моделирования выполнения работ по эксплуатации машины в соответствии с 4.2.5 следует хотя бы один раз произвести оценку выполняемых работ на соответствие требованиям эргономики на полноразмерных моделях или прототипах проектируемой машины или на самой машине с привлечением операторов, отобранных в качестве представителей контингента потенциальных операторов (см. EN 614-1). При этом следует произвести оценку риска по методике, описанной в 4.3. Если конструкция машины не сможет обеспечить приемлемого уровня риска, конструктор в соответствии с требованиями настоящего стандарта должен вернуться на более раннюю стадию проектирования и соответственно изменить конструкцию машины.
4.3 Экспертная оценка риска
4.3.1 Общие положения
Для оценки приемлемости рабочих поз и движений оператора в процессе эксплуатации машины установлен ряд зон, определяющих положение и характер движения различных частей тела оператора (см. 4.3.2-4.3.5). В результате анализа и оценки риска может быть принято одно из трех возможных решений:
- приемлемо: уровень риска для здоровья считается достаточно низким или пренебрежительно малым почти для всех здоровых операторов. Доработки конструкции машины не требуется;
- приемлемо при определенных условиях: существует риск для здоровья всего или части установленного контингента операторов при определенных условиях. Необходимо проанализировать все факторы, способствующие возникновению риска, исследовать возможности снижения уровня риска (например доработка конструкции машины). Если это невозможно, следует принять другие меры, например обеспечить оператора инструкцией по снижению риска до приемлемого уровня в процессе эксплуатации машины;
- неприемлемо: уровень риска недопустим для здоровья любой части установленного контингента операторов. Следует доработать конструкцию с целью улучшения рабочих поз и движений оператора в процессе эксплуатации машины.
Примечание - Современная наука допускает частичное использование количественных показателей, в результате чего может быть признана неприемлемой комбинация рабочих поз и движений, которые по отдельности могут быть приемлемы. Например наклон туловища вперед на 10° приемлем согласно требованиям 4.3.2.2, небольшой наклон туловища в сторону (например, 5°) приемлем согласно требованиям 4.3.2.3. Однако для комбинации этих положений количественные требования не могут дать однозначной оценки приемлемости.
В 4.3.2-4.3.5 (таблицы 1-5) приведены условия, при которых рабочие позы и движения оператора считаются приемлемыми, приемлемыми при определенных условиях или неприемлемыми. При этом рекомендуются условия, при которых приемлемость имеет место в подавляющем большинстве случаев. В ISO 11226 (приложение А) приведено подробное описание процедуры определения рабочих поз и движений операторов. Описанная в 4.3.2-4.3.5 процедура оценки риска предусматривает разбивку рабочих поз и движений на зоны, в которых риск может быть приемлем, неприемлем или приемлем при определенных условиях. Процедура оценки риска, приемлемого при определенных условиях, разделена на два этапа. На этапе 1 определяется зона, в которой допускается риск при определенных условиях, на этапе 2 приведены условия, при которых уровень риска можно признать приемлемым.
Приемлемость отдельных рабочих поз зависит от их характера, продолжительности и от времени восстановления после их окончания, у других рабочих поз и движений приемлемость может зависеть от частоты движений оператора и от наличия или отсутствия опоры для тела или его частей. Особенно важно, что наличие возле машины опоры для рук или туловища может приводить к различным результатам для плеч, туловища или головы. Более подробную информацию см. в ISO 11226.
Кроме того, на результат оценки может влиять наличие индивидуальных средств защиты, например их большой вес, увеличение размеров тела оператора и ограничение диапазона движений, необходимость применения для работы на машине инструментов, особенно тяжелых.
Следует также учитывать, что большая продолжительность рабочих периодов и с высокой частотой движений увеличивает риски для здоровья операторов в процессе эксплуатации машины.
Современная наука только отчасти позволяет проводить количественную оценку таких факторов риска (см. этап 2 процедуры оценки риска в 4.3.2-4.3.4).
Однако даже в тех случаях, когда машину можно эксплуатировать при упомянутых выше определенных условиях, настоятельно рекомендуется добиваться максимального улучшения рабочих поз, даже если эти позы уже квалифицированы как "приемлемые".
Необходимо, чтобы по таким машинам требования настоящего стандарта были включены в информацию для пользователя, например в такой редакции: "При непрерывной работе на данной машине в течение длительного времени у оператора могут возникать болезненные ощущения, усталость, скелетно-мускульные расстройства. Рекомендуется регулярно производить оценку состояния оператора и машины в тесном сотрудничестве производственных инженеров со специалистами по технике безопасности и здоровью; при этом необходимо добиваться улучшения рабочих поз для оператора, сокращения частоты движений и достаточного времени восстановления".
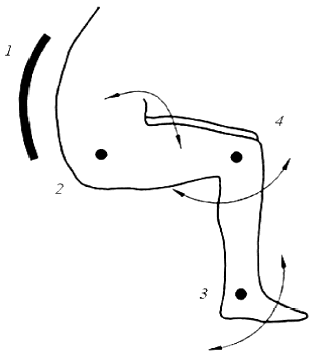
На рисунке 2 показана U-образная модель зависимости риска для здоровья оператора от частоты движений при конкретной рабочей позе. Риск для здоровья возрастает, когда условия работы оператора приближаются к тому или иному концу этой кривой, т.е. когда имеют место незначительные движения или они вообще отсутствуют (статическая поза), или, напротив, частота движений очень высока.
Следует отметить, что термин "частота движений" относится к числу отдельных движений частей тела оператора в минуту, а не к количеству рабочих циклов за тот же период времени. Это значит, что один рабочий цикл может включать несколько отдельных движений частей тела оператора.
Примечание - Из-за того, что скелетно-мускульная усталость является главным критерием характера работ, подпадающих под действие настоящего стандарта, результаты оценки риска для различных значений частоты движений могут отличаться от данных, приведенных в EN 1005-2, базирующихся, среди прочего, на критериях расхода энергии.
|
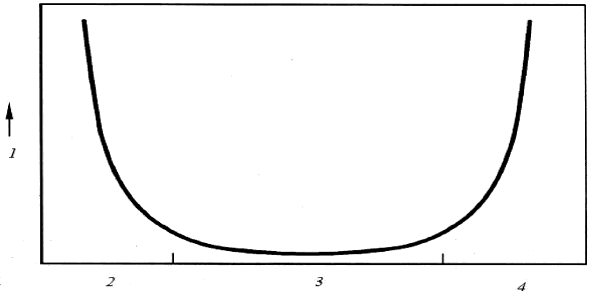
1 - риск для здоровья; 2 - статическая поза (движения отсутствуют или незначительны); 3 - движения с низкой частотой; 4 - движения с высокой частотой
Рисунок 2 - Зависимость риска для здоровья от поз и движений
4.3.2 Туловище
4.3.2.1 Общие положения
Позы туловища оператора следует оценивать с учетом его сгибаний вперед или назад (см. 4.3.2.2), наклонов и (или) поворотов в стороны (см. 4.3.2.3). Это относится как к положению сидя, так и к положению стоя.
Подробное описание рабочих поз и движений туловища оператора см. в ISO 11226, приложение А, пункт А.2.
4.3.2.2 Сгибание туловища вперед или назад
Этап 1
В таблице 1 приведена оценка приемлемости для каждой зоны сгибания туловища, показанной на рисунке 3 в зависимости от движений оператора (статическая поза, движения с низкой или высокой частотой).
|
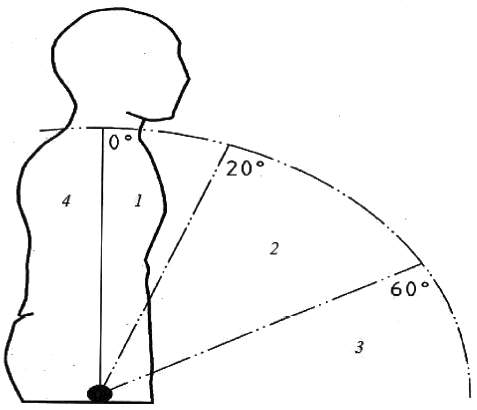
Рисунок 3 - Зоны сгибаний туловища вперед или назад
Таблица 1 - Оценка сгибания туловища вперед или назад
Зона | Статическая поза | Движение | |
с низкой частотой (<2/мин) | с высокой частотой ( | ||
1 | Приемлемо | Приемлемо | Приемлемо |
2 | Приемлемо при определенных условиях, перечисление а) этапа 2 | Приемлемо | Неприемлемо |
3 | Неприемлемо | Приемлемо при определенных условиях, перечисление с) этапа 2 | Неприемлемо |
4 | Приемлемо при определенных условиях, перечисление b) этапа 2 | Неприемлемо | |
| |||
Если результатом оценки будет "приемлемо при определенных условиях", то перечисления а), b) и с) этапа 2 обеспечат условия для достижения результатов "приемлемо" или "неприемлемо".
Этап 2:
а) приемлемо при наличии опоры для всего туловища. Если полной опоры для туловища нет, приемлемость зависит от длительности пребывания в такой позе и от времени восстановления. При наклоне туловища вперед полная опора неприемлема, если не доказано, что риск для здоровья незначителен для всего практически здорового рабочего контингента с учетом продолжительности эксплуатации машины;
b) приемлемо при наличии опоры для всего туловища;
c) неприемлемо при эксплуатации машины одним и тем же оператором в течение продолжительного времени. Исключение: приемлемо при наличии опоры для всего туловища в пределах зоны 4. Полная опора туловища при наклоне вперед неприемлема, если не доказано, что риск для здоровья незначителен для всего практически здорового рабочего контингента.
Примечание - Примером опоры для всего туловища при наклоне назад может служить стул с высокой спинкой для отдыха спины. Опора для всего туловища при наклоне вперед может быть обеспечена, например, использованием специального снаряжения для туловища (ремней) или любого устойчивого предмета, на который можно опереться непосредственно туловищем или руками.
4.3.2.3 Сгибание туловища при наклонах и (или) поворотах
Этап 1
На этапе 1 устанавливается приемлемость рабочих поз и движений туловища оператора при наклонах (вправо или влево) и поворотах в стороны (налево или направо), т.е. смещение верхней части туловища относительно нижней. Оценка дается для двух зон, определяемых углом наклона туловища (рисунок 4) и углом поворота туловища (рисунок 5) с учетом движений (статическая поза, движения с низкой или высокой частотой). Результаты приведены в таблице 2.
| ||
|
| |
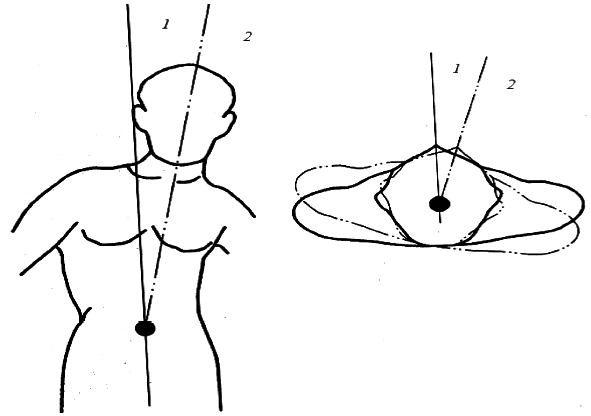
Таблица 2 - Оценка сгибания туловища при наклонах или поворотах
Зона | Статическая поза | Движение | |
с низкой частотой (<2/мин) | с высокой частотой ( | ||
1 | Приемлемо | Приемлемо | Приемлемо |
2 | Неприемлемо | Приемлемо при определенных условиях, перечисление а) этапа 2 | Неприемлемо |
Если результатом оценки будет "приемлемо при определенных условиях", то перечисление а) этапа 2 обеспечат условия для достижения результатов "приемлемо" или "неприемлемо".
Этап 2:
а) неприемлемо при эксплуатации машины одним и тем же оператором в течение продолжительного времени.
4.3.3 Плечо
Этап 1
В таблице 3 приведена оценка приемлемости для каждой зоны положения плеча оператора, определяемой углом между плечом и туловищем (рисунок 6), в зависимости от движений оператора (статическая поза, движения с низкой или высокой частотой).
Если результатом оценки будет "приемлемо при определенных условиях", то перечисления а), b) и с) этапа 2 обеспечат условия для достижения результатов "приемлемо" или "неприемлемо".
|
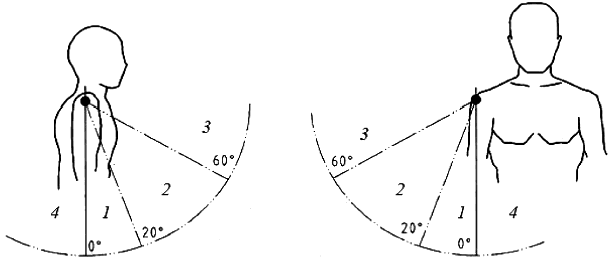
Рисунок 6 - Зоны положений плеча
Таблица 3 - Оценка положений плеча
Зона | Статическая поза | Движение | |
с низкой частотой (<2/мин) | с высокой частотой ( | ||
1 | Приемлемо | Приемлемо | Приемлемо |
2 | Приемлемо при определенных условиях, перечисление а) этапа 2 | Приемлемо | Приемлемо при определенных условиях, перечисление с) этапа 2 |
3 | Неприемлемо | Приемлемо при определенных условиях, перечисление b) этапа 2 | Неприемлемо |
4 | Неприемлемо | Приемлемо при определенных условиях, перечисление b) этапа 2 | Неприемлемо |
| |||
Зона 4 относится к такому положению плеча относительно туловища, при котором локоть находится позади туловища (вид сбоку на левой части рисунка 6), на виде спереди не виден (правая часть рисунка 6).
Этап 2:
a) приемлемо, если есть опора для всей руки; приемлемость зависит также от продолжительности пребывания в данной позе и времени восстановления;
b) неприемлемо при эксплуатации машины одним и тем же оператором в течение продолжительного времени;
c) неприемлемо при высокой частоте движений (10/мин), если машина эксплуатируется одним и тем же оператором в течение продолжительного времени.
Примечание - Полная опора для плеча может быть обеспечена путем размещения локтя/локтевого сгиба на предусмотренном для этого месте на машине. Однако она может быть достигнута любым другим способом, ограничивающим движения плеча и фиксирующим его в точках прижима.
4.3.4 Голова и шея
4.3.4.1 Общие положения
Положение головы и шеи должно оцениваться с учетом направления зрения вверх-вниз относительно нормальной линии взгляда (см. 4.3.4.2), а также наклона и поворота шеи в стороны (см. 4.3.4.3). Это относится как к положению сидя, так и к положению стоя.
4.3.4.2 Нормальная линия взгляда
Рекомендуется оценку наклона головы и шеи вперед/назад производить с учетом зрения вверх-вниз относительно нормальной линии взгляда, т.е. центра поля зрения, когда можно видеть область в пределах приблизительно в 10° вверх или вниз от нормальной линии взгляда. Описанная ниже процедура такой оценки представляет собой упрощенную версию процедуры, описанной в ИСО 11226 (основной текст и приложение А). Эта процедура применима только для вертикального положения туловища оператора (для других положений туловища оператора следует применять иные требования).
|
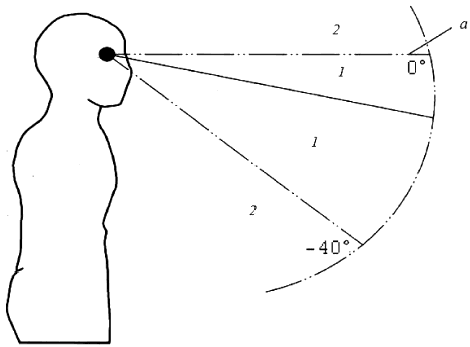
а - горизонталь
Рисунок 7 - Зоны линии зрения вверх-вниз ("нормальной линии взгляда")
Этап 1
Линия зрения вверх-вниз ("нормальной линии взгляда") определяется и классифицируется в одной из зон, показанных на рисунке 7. В таблице 4 представлены результаты оценки для каждой зоны.
Если результатом оценки будет "приемлемо при определенных условиях", то перечисление а) этапа 2 обеспечат условия для достижения результатов "приемлемо" или "неприемлемо".
Таблица 4 - Оценка линии взгляда вверх или вниз
Зона | Статическая поза | Движение | |
с низкой частотой (<2/мин) | с высокой частотой ( | ||
1 | Приемлемо | Приемлемо | Приемлемо |
2 | Неприемлемо | Приемлемо при определенных условиях, перечисление а) этапа 2 | Неприемлемо |
| |||
Этап 2:
а) неприемлемо при эксплуатации машины одним и тем же оператором в течение продолжительного времени.
4.3.4.3 Наклон или поворот шеи (головы) в стороны относительно вертикального положения туловища
Этап 1
Наклоны шеи в стороны (вправо или влево), как и повороты (направо или налево), определяются и классифицируются по соответствующим зонам, как показано на рисунках 8 и 9. В таблице 5 приведена оценка приемлемости для каждой зоны при наклоне и повороте шеи (головы) в зависимости от движений оператора (статическая поза, движения с низкой или высокой частотой).
Если результатом оценки будет "приемлемо при определенных условиях", то перечисление а) этапа 2 обеспечит условия для достижения результатов "приемлемо" или "неприемлемо".
| ||
|
| |
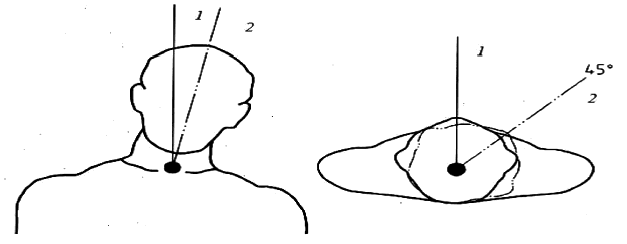
Таблица 5 - Оценка наклонов и поворотов шеи в стороны
Зона | Статическая поза | Движения | |
с низкой частотой (<2/мин) | с высокой частотой ( | ||
1 | Приемлемо | Приемлемо | Приемлемо |
2 | Неприемлемо | Приемлемо при определенных условиях, перечисление а) этапа 2 | Неприемлемо |
Этап 2:
а) неприемлемо при эксплуатации машины одним и тем же оператором в течение продолжительного времени.
4.3.5 Другие части тела
В таблице 6 приведена оценка приемлемости поз и движений других частей тела оператора, не рассмотренных в 4.3.2-4.3.4.
Процедура оценки приемлемости перечисленных поз и движений оператора в процессе эксплуатации машины применима как для положения сидя (рисунки 10 и 11), так и для положения стоя, а также может быть применена к иному рабочему положению, если таковое потребуется.
Таблица 6 - Оценка поз и движений других частей тела
Неприемлемо | Приемлемо | Неприемлемо |
с низкой частотой (<2/мин) | с высокой частотой ( | |
Статическая поза, т.е. неудобные позы, такие как изгиб нижней части спины (при сидении), сгиб колена (при стоянии), вытянутое и (или) поднятое колено без опоры для туловища, приподнятая лопатка, неравномерное распределение веса на обе ноги в положении стоя и положения суставов у пределов допустимого для них диапазона движений | Движения, такие, как сгибание колена в положении стоя, подъем лопатки, приближение движений суставов к предельным значениям допустимого для них диапазона | |
| ||
|
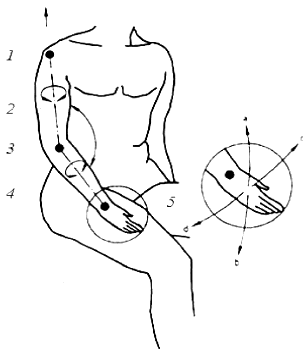
1 - лопатка; 2 - плечо; 3 - локоть; 4 - предплечье; 5 - запястье
а - тыльная сторона кисти направлена к предплечью; b - ладонь направлена к предплечью;
с - большой палец направлен к предплечью; d - мизинец направлен к предплечью
Рисунок 10 - Верхние конечности
|
1 - нижняя часть спины; 2 - бедро; 3 - лодыжка; 4 - колено
Рисунок 11 - Нижняя часть спины и нижние конечности
Приложение ДА
(справочное)
Сведения о соответствии ссылочных европейских стандартов межгосударственным стандартам
Таблица Д.А.1
Обозначение ссылочного европейского стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
EN 414 | - | *, |
________________
| ||
EN 547-1 | - | *, |
________________ | ||
EN 547-2 | - | *, |
________________
| ||
EN 547-3 | - | *, |
________________
| ||
EN 614-1 | - | * |
________________
| ||
EN 894-1 | IDT | ГОСТ EN 894-1-2012 "Безопасность машин. Эргономические требования к оформлению индикаторов и органов управления. Часть 1. Общие руководящие принципы при взаимодействии оператора с индикаторами и органами управления" |
EN 894-2 | - | * |
EN 894-3 | IDT | ГОСТ EN 894-3-2012 "Безопасность машин. Эргономические требования к оформлению индикаторов и органов управления. Часть 3. Органы управления" |
EN 1005-1 | - | *, |
________________
| ||
EN 1005-2 | IDT | ГОСТ ЕН 1005-2-2005 "Безопасность машин. Физические возможности человека. Часть 2. Составляющая ручного труда при работе с машинами и механизмами" |
EN 1005-3 | IDT | *,
|
_______________
| ||
EN 1005-5 | IDT | ГОСТ EN 1005-5-2014 "Безопасность машин. Физические возможности человека. Часть 5. Оценка риска для движений оператора, повторяющихся с высокой частотой" |
EN 1050 | IDT | * |
EN ISO 12100-1 | - | * |
EN ISO 12100-2 | - | * |
EN ISO 14738 | - | * |
ISO 11226:2000 | - | *, |
________________
| ||
* Соответствующий межгосударственный стандарт отсутствует До его принятия рекомендуется использовать перевод на русский язык данного европейского стандарта. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT - идентичные стандарты.
| ||
Библиография
[1] Деллимен Н.Дж., Хаслгрейв С.М., Позы и движения работающих. Инструментарий для оценки и конструирования. Тэйлор & Фрэнсис, Лондон/CRC Пресс, Бока Рэйтон, Флорида, США, 2004 (Delleman N.J., Haslegrave C.V., Chaffin D.B. : Working Postures and movements - Tools for Evaluation and Engineering. Taylor & Francis, London/CRC Press, Boca Raton, Fl. USA, 2004) |
[2] Европейская организация по улучшению условий жизни и работы, 2001 г. Третий Европейский отчет об обследовании условий работы в 2000 г. (Люксембург: Офис для официальных публикаций европейских обществ) European Foundation for the improvement of Living and Working Conditions 2001, Third European Survey or Working Conditions 2000 (Luxemburg: Office for Official Publications of the European Communities) |
УДК 621.9.02-434.5.006.354 | МКС 13.110 |
Ключевые слова: безопасность, машина, оценка риска, приемлемо, неприемлемо, рабочая поза, рабочее движение | |
Электронный текст документа
и сверен по:
, 2019
{kind=link}