ГОСТ ЕН 1005-2-2005
Группа Г07
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Безопасность машин
ФИЗИЧЕСКИЕ ВОЗМОЖНОСТИ ЧЕЛОВЕКА
Часть 2
СОСТАВЛЯЮЩАЯ РУЧНОГО ТРУДА ПРИ РАБОТЕ С МАШИНАМИ И МЕХАНИЗМАМИ
Safety of machinery. Human physical performance.
Part 2. Manual handling of machinery and component parts of machinery
МКС 13.110
13.180
ОКСТУ 0012
Дата введения 2008-01-01
Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0-92 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2-97 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Порядок разработки, принятия, применения, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Всероссийским научно-исследовательским институтом стандартизации и сертификации в машиностроении (ФГУП "ВНИИНМАШ") и Экспериментальным научно-исследовательским институтом металлорежущих станков (ОАО "ЭНИМС") на основе собственного аутентичного перевода стандарта, указанного в пункте 4
2 ВНЕСЕН Федеральным агентством по техническому регулированию и метрологии
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол N 21 от 21 сентября 2005 г.)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны | Сокращенное наименование национального органа по стандартизации |
Азербайджан | AZ | Азстандарт |
Армения | AM | Минторгэкономразвития |
Беларусь | BY | Госстандарт Республики Беларусь |
Казахстан | KZ | Госстандарт Республики Казахстан |
Кыргызстан | KG | Кыргызстандарт |
Молдова | MD | Молдова-Стандарт |
Российская Федерация | RU | Федеральное агентство по техническому регулированию и метрологии |
Таджикистан | TJ | Таджикстандарт |
Узбекистан | UZ | Узстандарт |
4 Настоящий стандарт идентичен европейскому стандарту ЕН 1005-2:2003 "Безопасность машин. Физические возможности человека. Часть 2. Составляющая ручного труда при работе с машинами и механизмами" (ЕН 1005-2:2003 "Safety of machinery - Human physical performance - Part 2: Manual handling of machinery and component parts of machinery").
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных (региональных) стандартов соответствующие им межгосударственные стандарты, сведения о которых приведены в дополнительном приложении D.
Степень соответствия - идентичная (IDT)
5 Приказом Федерального агентства по техническому регулированию и метрологии от 19 апреля 2007 г. N 71-ст межгосударственный стандарт ГОСТ ЕН 1005-2-2005 введен в действие в качестве национального стандарта Российской Федерации с 1 января 2008 г.
6 ВВЕДЕН ВПЕРВЫЕ
Информация о введении в действие (прекращении действия) настоящего стандарта публикуется в указателе "Национальные стандарты".
Информация об изменениях к настоящему стандарту публикуется в указателе "Национальные стандарты", а текст изменений - в информационных указателях "Национальные стандарты". В случае пересмотра или отмены настоящего стандарта соответствующая информация будет опубликована в информационном указателе "Национальные стандарты"
Введение
При конструировании и производстве машин производитель должен выполнять основополагающие требования безопасности и защиты здоровья, которые зафиксированы в конструкторской документации для машин. Производитель должен оценить исходящие от машины опасности и обеспечить упреждение этих опасностей во время всего жизненного цикла машины.
Настоящий стандарт является гармонизированным стандартом по отношению к директивам для машин и относящимся к ним правилам EFTA.
Настоящий стандарт является стандартом В-типа, как он дан в ЕН 1070.
Положения этого документа могут также быть изменены или дополнены стандартом С-типа.
Примечание - Для машин, которые по области применения соответствуют стандарту С-типа, а сконструированы и созданы согласно положениям стандарта С-типа, является действительным то, что установления стандарта С-типа имеют преимущественное право перед установлениями стандарта В-типа.
Ручное перемещение грузов может привести к высокому риску повреждений скелетно-мышечной системы в случае, когда переносимые грузы являются слишком тяжелыми и их переносят многократно в течение долгого времени или в неудобной позе для человека. Заболевания скелетно-мышечной системы распространены по всей Европе. Ручные усилия часто требуются от операторов, которые в соответствии с предназначением выполняют работу на машинах. Риски возникают тогда, когда машины не соответствуют эргономическим требованиям.
Настоящий стандарт определяет диапазон допустимых максимальных усилий, положения тела при выполнении работы и перемещении груза, а также частоты и продолжительности работы для всех случаев, когда можно ожидать, что при эксплуатации машин либо при другом виде их обслуживания могут возникнуть вышеперечисленные опасности для здоровья. Эта информация необходима при конструировании и производстве машин, на которых используется ручной труд. Данные в этом стандарте критерии оформления могут быть применены конструкторами для разработки оценки рисков.
Этот стандарт требует от конструктора машины выполнения трех задач:
- снижения количества ручных операций, насколько это возможно;
- применения технических вспомогательных средств;
- дальнейшего устранения остающихся возможных рисков за счет оптимизации производственного процесса.
Для машин и их составных частей, которые передвигаются или транспортируются не вручную, см. ЕН 292-2:1991 (пункт 4.2).
1 Область применения
Настоящий стандарт устанавливает эргономические требования к машинам производственного и бытового назначения при обслуживании которых, включая и относящийся к машинам инструмент, может использоваться ручной труд.
Настоящий стандарт действителен для всех ручных операций на машинах или механизмах с предметами массой не менее 3 кг, а также для перемещения грузов на расстояние менее 2 м. Стандарт дает информацию об эргономических требованиях к конструкции машин и оценке рисков при подъеме, опускании и переносе грузов при изготовлении, транспортировке, сборке, вводе в эксплуатацию (монтаж, установке и наладке), эксплуатации, поиске неисправностей, обслуживании, хранении или инструктаже, а также при выводе из эксплуатации, демонтаже и утилизации машин.
Настоящий стандарт подходит для всех категорий работающих в целом и отдельных групп (см. приложение А).
Настоящий стандарт не касается случаев удерживания предметов на одном месте, перемещения предметов, сдвигания или перетягивания предметов, ручного управления машиной или ручного перемещения грузов в сидячем положении.
Настоящий стандарт применяется к машинам, изготовленным после даты его введения.
2 Нормативные ссылки
В настоящем стандарте использованы датированные и недатированные ссылки на международные стандарты. При датированных ссылках последующие редакции международных стандартов или изменения к ним действительны для настоящего стандарта только после введения изменений к настоящему стандарту или путем подготовки новой редакции настоящего стандарта. При недатированных ссылках действительно последнее издание приведенного стандарта (включая изменения).
ЕН 292-2:1991 Безопасность машин - Основные положения, общие принципы конструирования - Часть 2: Технические принципы и технические условия
ЕН 614 Безопасность машин - Эргономические принципы конструирования - Часть 1: Термины и общие положения
ЕН 1005-1:2001 Безопасность машин - Физические возможности человека - Часть 1: Термины и определения
ЕН 1005 Безопасность машин - Физические возможности человека - Часть 3: Рекомендуемые пределы усилий для работы на машинах
Часть 4: Положение тела при работе с машинами и механизмами
ЕН 1050 Безопасность машин - Принципы оценки и определения риска
EH 1070:1998 Безопасность машин - Терминология
ЕН ИСО 7730 Умеренная среда - Определение показателей PMV и PPD и характеристика условий теплового комфорта
EHV 26385 Эргономические принципы в конструировании рабочих систем
3 Термины и определения
В настоящем стандарте применены термины по ЕН 1005-1 и ЕН 1070.
4 Требования к конструкции машин и механизмов, при работе которых используется ручной подъем, опускание и перенос грузов
4.1 Общие положения
С целью сокращения до минимума риска для здоровья и безопасности операторов при подъеме, опускании или переносе тяжестей на машинах или механизмах разработчик и изготовитель машины обязаны:
a) установить, имеется ли опасность для операторов при ручном перемещении грузов во время работы на машине или механизме по прямому назначению, если таковая опасность существует, то должны быть применены методы оценки рисков (см. 4.3.1, 4.3.2 и 4.3.3);
b) устранить опасность путем исключения ручного труда (подъема, опускания и переноски) на машине или механизмах (см. 4.2.1); если это невозможно, то предусмотреть (см. 4.2.2) применение тех или иных вспомогательных приспособлений (см. 4.2.2) и/или переоснастить или заново оснастить машину и ее составные части согласно требованиям эргономики (см. 4.3);
c) предоставить технические спецификации и руководство по эксплуатации с тем, чтобы оценка рисков могла быть произведена на их основе.
В каждом случае разработчик должен предусмотреть инструкции по монтажу, транспортировке и вводу в эксплуатацию, работе и выводу из эксплуатации машины (см. 4.4), в которых должны содержаться сведения по технике безопасности и охране труда.
Разработчиком на стадии проектирования должна быть предусмотрена техническая оснастка для ручного манипулирования грузами.
Наилучшая возможность защиты здоровья, безопасности труда и повышения производительности труда состоит в постоянном соблюдении эргономических требований к рабочей системе.
4.2 Требования к конструкции машин
4.2.1 Системы без ручного манипулирования грузами
Наилучшая возможность исключить риски, возникающие вследствие применения ручного манипулирования грузами, обеспечивается полным отказом от применения ручного труда. Вообще, разработчики новых производственных систем должны ставить целью внедрение полностью автоматических систем взамен ручного труда.
4.2.2 Манипулирование грузами вручную с использованием вспомогательных механизмов
Разработчики машин должны направлять свои усилия на то, чтобы предусмотреть применение соответствующих вспомогательных средств и оборудования в тех случаях, когда существующая практика требует ручного систематического труда или ручного перемещения тяжелых предметов, или точного перемещения предметов. Соответствующие технические вспомогательные средства устраняют или снижают риск скелетно-мышечных повреждений, однако могут привести к новым опасностям, например, когда они сами требуют обслуживания. Они могут также оказывать влияние на особые методы ручного труда на всех ступенях цепи ручных операций. Вспомогательные средства для ручного труда должны быть согласованы с остальной производственной системой, включая их расположение и перемещение. При применении технических вспомогательных средств нужно предусмотреть больше места для доступа к машине, чтобы оператор имел возможность во время работы совершать удобные для него движения телом.
Для определения параметров систем, которые требуют применения ручного труда, следует соблюдать рекомендации, указанные в 4.3.2.
Предельные значения усилия при подтягивании или сдвигании предметов с использованием технических вспомогательных средств должны соответствовать ЕН 1005-3. Положение тела при выполнении работ см. в ЕН 1005-4.
4.3 Оценка рисков и требования к конструкции машин и механизмов в случае применения ручного манипулирования грузом
4.3.1 Действия при оценке рисков
С целью контроля рисков для безопасности и здоровья человека конструктор должен раскрыть возникающие опасности и провести соответствующую оценку рисков. Относительно общих требований к оценке рисков см. ЕН 1050. Риски применения ручного труда следует уменьшать путем применения эргономических принципов при конструировании машин (см. ЕН 614-1).
Представленная здесь модель оценки рисков включает три процесса. Эти процессы основаны на одних и тех же основных положениях и различаются только по сложности их применения.
Процесс 1 - это быстрый предварительный анализ. Процесс 2, простой управляемый метод, должен применяться, если при быстром предварительном анализе выявлены риски. Процесс 2 учитывает некоторые дополнительные факторы риска. Процесс 3 представляет собой метод всеобъемлющей оценки, который учитывает дополнительные факторы риска, не включенные в процессы 1 и 2. Эти три процесса различны по сложности. Оценка рисков начинается с процесса 1 (простейший метод), а процессы 2 и 3 применяются, только если условия или расчетные варианты нагрузки не определяются во время процесса 1.
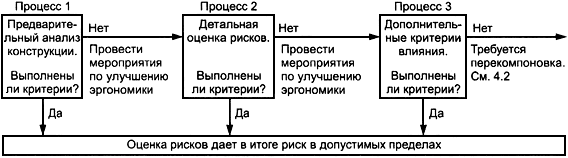
Примечание - Рекомендуется при выполнении последующих процессов стремиться к максимальному уменьшению факторов риска.
Рисунок 1 -Схема, изображающая ступенчатое приближение при оценке рисков
4.3.2. Идентификация опасностей, оценка риска, рекомендации по оценке риска и требования, предъявляемые с целью снижения риска
В данной части стандарта даны рекомендации по ручному перемещению грузов на нижнем уровне рисков. Информация базируется на современном состоянии эргономических знаний. Если эти требования не соблюдаются, нужно провести оценку рисков.
Следующие точки зрения (см. 4.3.2.1-4.3.2.3) должны учитываться при оценке и снижении рисков.
4.3.2.1 Грузы
4.3.2.1.1 Масса
Масса предмета (машины, деталей машин) включает также сопутствующие детали, такие как упаковка, батареи, полный магазин и т.д. Кроме того, в общую массу включаются необходимые для выполнения ручного труда технические вспомогательные средства.
При конструировании машины или ее составной части нужно учесть, что их масса может представлять опасность, если конструируемый предмет нужно будет перемещать вручную. Для определения безопасного максимального предела массы см. 4.3.3.
4.3.2.1.2 Распределение массы
Распределение массы определяют с учетом расположения центра тяжести груза. Центр тяжести должен находиться как можно ближе к телу и по центру между двумя руками. Во время выполнения ручного манипулирования следует избегать смещения центра тяжести внутри предмета. Если вышеуказанные требования невыполнимы (например, при перемещении жидкостей), то на таком предмете следует делать соответствующее обозначение.
4.3.2.1.3 Габариты
Необходимо стремиться к тому, чтобы перемещаемые предметы были компактными. Если предмет перемещается двумя руками, ширина его не должна превышать ширины плеч (примерно 60 см), а глубина не должна превышать 50 см (рекомендуется глубина не более 35 см), чтобы груз можно было держать как можно ближе к телу. Высота предмета должна быть такой, чтобы не закрывать обзор человеку, несущему предмет.
4.3.2.1.4 Ручки/рукоятки
Наружные поверхности предметов (включая упаковку новых деталей машин) должны быть удобными для перемещения руками. Предмет должен быть таким, чтобы его было удобно брать и нести; для этого он должен иметь рукоятки или отверстия, за которые можно взяться руками при перемещении предмета.
Рукоятки должны размещаться с учетом центра тяжести предмета и вида работы с целью обеспечения наилучшего положения тела и наиболее оптимальных движений при подъеме и перемещении предмета. Ручки должны располагаться в горизонтальной плоскости, это должно обеспечиваться конструкцией машины. Рукоятки не должны иметь острых краев, чтобы исключить риск повреждения пальцев. Форма рукоятки должна обеспечить удобство ее охвата при нейтральном положении руки и кисти.
Диаметр рукоятки должен равняться 2-4 см.
Ширина рукоятки или отверстия для кисти руки должна быть минимум 12,5 см, чтобы предмет можно было переносить в перчатках, при этом расстояние над пальцами - 7 см. Оптимальная форма рукоятки - цилиндр или эллипс. Как оценить захватывающие возможности рукоятки, см. 4.3.3.2 или 4.3.3.3.
4.3.2.2 Взаимодействие оператора и машины
4.3.2.2.1 Горизонтальное положение и расстояние
Если между работником, осуществляющим перемещение предмета, и самим предметом существуют препятствия, они могут затруднить или сделать опасной работу по перемещению. Горизонтальное расстояние от центра между голеностопными суставами обеих ног и обеими руками должно быть меньше 25 см. При большем горизонтальном расстоянии следует проводить оценку рисков по 4.3.3.
4.3.2.2.2 Вертикальное положение и расстояние подъема
Высота точки захвата (измеряемая от средней фаланги пальцев до пола) должна быть 60-90 см. Вертикальное перемещение предмета не должно превышать 25 см. При большем расстоянии или меньшей высоте точки захвата следует проводить оценку рисков по 4.3.3.
4.3.2.2.3 Частота выполнения ручных операций
Машины должны быть спроектированы так, чтобы ручной труд применялся как можно реже. Должна существовать возможность регулирования частоты применения ручного труда. Оценку рисков, возникающих из сочетания частоты применения ручного труда и массы предмета, проводят по 4.3.3.
4.3.2.2.4 Положение тела работающего
Конструкцией машины должно быть предусмотрено уменьшение возникновения неудобных положений тела оператора (например, повороты тела, наклоны или подъем предмета с пола), а также длительного ручного труда, ведущего к усталости тела, на любой стадии работы машины (включая ее изготовление, транспортировку, ввод в действие, производство и вывод из эксплуатации). При необходимости или для подстраховки (дополнительно) должна быть предусмотрена смена положения тела (ЕН 1005-4).
4.3.2.2.5 Переноска грузов
Машины должны быть спроектированы так, чтобы устранить ручную переноску. Если это невозможно, то расстояние, на которое груз переносится вручную, должно быть сведено к минимуму (меньше 2 м).
4.3.2.2.6 Работа, выполняемая одной рукой
Если предмет можно взять только одной рукой, это может представлять опасность для оператора. Если работы только одной рукой нельзя избежать, то следует провести оценку рисков (см. 4.3.3.3).
4.3.2.2.7 Работа, выполняемая двумя операторами
Если работают два (или более) человека, нагрузка на одного оператора уменьшается, однако возникает дополнительная опасность из-за возможной несогласованности действий работающих. Согласно требованиям эргономики необходимость поднятия грузов двумя (или более) операторами может быть оправдана только в отдельных случаях; для этих отдельных случаев следует провести оценку рисков (см. 4.3.3.3).
4.3.2.2.8 Ручной труд в сочетании с вращением предмета
Следует избегать ручного перемещения предметов, при котором предмет поворачивается вокруг своей оси. Если этого избежать не удается, рекомендуется новый вариант компоновки машины, при котором применяются дополнительные технические вспомогательные средства.
4.3.2.2.9 Дополнительные нагрузки на корпус тела человека
Дополнительные нагрузки на тело наряду с ручным трудом могут вызвать новые опасности. Если их нельзя избежать, следует провести оценку рисков (см. 4.3.3.3).
4.3.2.2.10 Возможность захвата
Неудобные условия захвата переносимого предмета руками могут создать опасную ситуацию.
Если их нельзя избежать, следует провести оценку рисков (см. 4.3.3.3).
4.3.2.3 Окружающая среда
Окружающая среда способна вызвать опасности и дополнительные риски.
Если их нельзя избежать, квалифицированный персонал должен провести оценку рисков. К окружающим воздействиям относятся механические колебания, климат, температура (ЕН ИСО 7730), освещение, шум или химические загрязнения (EHV 26385).
4.3.3 Методы оценки рисков
Описываемая модель оценки рисков включает в себя три процесса. Процесс 1 - это предварительный анализ. Процесс 2, простой управляемый метод, должен применяться, если при предварительном анализе выявлены риски. Процесс 2 учитывает некоторые дополнительные факторы риска. Процесс 3 представляет собой метод всеобъемлющей оценки, который учитывает дополнительные факторы риска, не включенные в процессы 1 и 2. Эти три процесса различны по сложности. Оценка рисков начинается с процесса 1 (простейший метод), а процессы 2 и 3 применяют, только если условия или расчетные варианты нагрузки не определяются во время процесса 1. Каждый процесс требует трехступенчатого применения:
- шаг 1 - допустимая масса с учетом групп населения (см. таблицу 1);
- шаг 2 - проведение оценки рисков согласно рабочему листку (см. 4.3.3.1-4.3.3.3);
- шаг 3 - необходимые мероприятия:
никаких мероприятий при приемлемом уровне рисков,
перекомпоновка машины заново,
применение сложных методов оценки рисков.
Конструктору следует уже после шага 3 процесса 1 предпринять перекомпоновку заново, не переходя к процессу 2. Процессы 2 и 3 представляют собой не шаги повтора, а детализированную оценку рисков, которая основывается на их методологии.
Практическое применение описано в приложении С.
Таблица 1 - Допустимая масса груза для разных групп населения
Область применения |
| Процентное отношение | Группы населения | |||
мужчины и женщины | женщины | мужчины | ||||
Бытовое использование | 5 | - | Дети и пожилые люди | Население в целом | ||
10 | 99 | Население в целом, бытовое применение машин | ||||
Производственное использование (общее) | 15 | 95 | 90 | 99 | Трудоспособное население в целом, включая пожилых людей и молодежь | Трудоспособное население в целом |
25 | 85 | 70 | 90 | Взрослое трудоспособное население | ||
Производственное использование (специализированное) | 30 | - | Специальные группы трудоспособного населения | Специальные группы трудоспособного населения | ||
35 | ||||||
40 | ||||||
| ||||||
4.3.3.1 Процесс 1. Предварительный анализ на основе случаев критической нагрузки
При выполнении этого процесса конструктор может выбрать один из трех случаев критической нагрузки, который соответствует предлагаемому состоянию оформления. Так может выполняться быстрый предварительный анализ.
Ограничительным условием здесь является то, что он выполняется для исключения ручного труда.
4.3.3.1.1 Выбор допустимой массы груза (шаг 1)
Следует определить группу населения и выбрать допустимую массу груза , соответствующую определенной группе (см. таблицу 1).
4.3.3.1.2 Проведение оценки рисков (шаг 2)
Необходимо выбрать следующие предпосылки использования ручного труда, если они имеются:
- работа выполняется только двумя руками;
- неограниченное положение тела и неограниченные движения;
- работа выполняется только одним человеком;
- равномерный подъем без толчков;
- хорошие условия захвата предмета руками;
- хорошая устойчивость оператора;
- другие ручные операции, выполняемые одновременно с подъемом предмета, сведены к минимуму;
- поднимаемые предметы не слишком холодные, горячие или грязные;
- температура окружающей среды равномерная.
Если нет хотя бы одной из указанных предпосылок, следует применить детализированный процесс 2. Если имеются все предпосылки, следует определить, соответствуют ли они требованиям критической нагрузки (для 8-часовой смены или меньшего периода рабочего времени).
4.3.3.1.2.1 Случаи критических нагрузок
a) масса (случай 1):
- масса переносимых вручную предметов не больше 70% приведенной в таблице 1;
- высота подъема груза не более 25 см, а груз поднимается от бедра на высоту плеч;
- корпус тела прямой, не поворачивается;
- груз удерживается вблизи корпуса тела;
- частота подъема равномерная или меньше 3,33·10 Гц (один подъем каждые 5 мин).
b) расстояние подъема (случай 2):
- масса переносимых вручную предметов не более 60% приведенной в таблице 1;
- груз поднимается от колена на высоту плеч;
- корпус тела прямой, не поворачивается;
- груз удерживается вблизи корпуса тела;
- частота подъема равномерная или меньше 3,33·10 Гц (один подъем каждые 5 мин).
c) частота выполнения (случай 3):
- масса переносимых вручную предметов не более 30% приведенной в таблице 1;
- высота подъема груза не более 25 см, а груз поднимается от бедра на высоту плеч;
- частота подъема равномерная или меньше 0,08 Гц (пять подъемов в мин);
- корпус тела прямой, не поворачивается;
- груз удерживается вблизи корпуса тела
или
- масса переносимых вручную предметов не более 50% приведенной в таблице 1;
- высота подъема груза более 25 см, а груз поднимается от бедра на высоту плеч;
- частота подъема равномерная или меньше 0,04 Гц (2,5 подъема каждую минуту);
- корпус тела прямой, не поворачивается;
- груз удерживается вблизи корпуса тела.
4.3.3.1.3 Необходимые мероприятия (шаг 3)
Если конструкция соответствует описанным случаям критических нагрузок (случаи 1-3), то риск оценивается как приемлемый.
Если конструкция не соответствует таким случаям или не созданы предпосылки, описанные в шаге 2, необходимо либо
- изменить конструкцию машины, либо
- применить детализированные процессы оценки рисков (процесс 2).
4.3.3.2 Процесс 2. Оценка риска на основе таблиц
4.3.3.2.1 Выбор допустимой массы (шаг 1)
Следует определить группу населения и выбрать допустимую массу , соответствующую определенной группе (см. таблицу 1).
4.3.3.2.2 Проведение оценки рисков (шаг 2)
Определите, имеются ли следующие предпосылки использования ручного труда:
- работа выполняется только двумя руками;
- неограниченное положение корпуса тела и неограниченные движения;
- работа выполняется только одним человеком;
- равномерный подъем без толчков;
- хорошие условия захвата предмета руками;
- хорошая устойчивость оператора;
- другие ручные операции, выполняемые одновременно с подъемом предмета, сведены к минимуму;
- поднимаемые предметы не слишком холодные, горячие или грязные;
- температура окружающей среды равномерная.
Если нет хотя бы одной из указанных предпосылок, следует применить детализированный процесс 3.
Если предпосылки имеются, следует оценить уровень рисков. Для этого необходимо рассчитать рекомендуемое предельное значение массы на основе коэффициентов, приведенных в таблице 2.
Таблица 2 - Коэффициенты для расчета рекомендуемых предельных значений массы
Коэффициент высоты | ||||||||||
Вертикальная позиция | 0 | 25 | 50 | 75 | 100 | 130 |
| |||
Значение коэффициента | 0,78 | 0,85 | 0,93 | 1,00 | 0,93 | 0,84 | 0,00 | |||
Коэффициент подъема | ||||||||||
Расстояние подъема | 25 | 30 | 40 | 50 | 70 | 100 |
| |||
Значение коэффициента | 1,00 | 0,97 | 0,93 | 0,91 | 0,88 | 0,87 | 0,00 | |||
Коэффициент расстояния | ||||||||||
Горизонтальная позиция | 25 | 30 | 40 | 50 | 56 | 60 |
| |||
Значение коэффициента | 1,00 | 0,83 | 0,63 | 0,50 | 0,45 | 0,42 | 0,00 | |||
Коэффициент асимметрии | ||||||||||
Угол асимметрии | 0 | 30 | 60 | 90 | 120 | 135 |
| |||
Значение коэффициента | 1,00 | 0,90 | 0,81 | 0,71 | 0,62 | 0,57 | 0,00 | |||
Коэффициент захвата | ||||||||||
Качество захвата | Хорошее | Умеренное | Плохое | |||||||
Описание | См. приложение С | |||||||||
Значение коэффициента | 1,00 | 0,95 | 0,90 | |||||||
Коэффициент частоты | ||||||||||
Частота | Гц | 0,0033 | 0,0166 | 0,0666 | 0,1000 | 0,1500 | 0,2000 |
| ||
ходов/мин | 0,20 | 1 | 4 | 6 | 9 | 12 |
| |||
Значение коэффициента | Длительность работы коэффициента | 1,00 | 0,94 | 0,84 | 0,75 | 0,52 | 0,37 | 0,00 | ||
1 ч | 0,95 | 0,88 | 0,72 | 0,50 | 0,30 | 0,00 | 0,00 | |||
2 ч | 0,85 | 0,75 | 0,45 | 0,27 | 0,00 | 0,00 | 0,00 | |||
Коэффициент риска вычисляют по формуле
![]() .
.
4.3.3.2.3 Необходимые мероприятия (шаг 3)
Риск можно рассматривать:
- как приемлемый (зеленый), если 0,85.
- как значительный (желтый), если 0,85![]() 1,0. При этом необходимо:
1,0. При этом необходимо:
применить процесс 3 с целью установить, как можно избежать риска,
машину перекомпоновать заново либо
обеспечить условия, при которых риск становится приемлемым.
- как недопустимый (красный), если 1,0. При этом требуется перекомпоновка, в результате которой должны увеличиться коэффициенты из таблицы 2 при расчете
.
Рекомендуемое предельное значение массы для процесса 2 вычисляют по формуле
![]() ,
,
при этом допустимая масса дается в килограммах.
4.3.3.3 Процесс 3. Расчет на основе формул
4.3.3.3.1 Выбор допустимой массы груза (шаг 1)
Следует определить группу населения и выбрать допустимую массу , соответствующую определенной группе (см. таблицу 1).
4.3.3.3.2 Проведение оценки рисков (шаг 2)
Выбираются следующие предпосылки использования ручного труда, если они имеются:
- неограниченное положение тела и неограниченные движения;
- равномерный подъем без толчков;
- хорошая устойчивость оператора;
- поднимаемые предметы не слишком холодные, горячие или грязные;
- температура окружающей среды равномерная.
Если нет хотя бы одной из указанных предпосылок, следует обеспечить условия, при которых риск становится приемлемым (ЕН 614-1).
Если имеются все предпосылки, следует провести оценку рисков путем расчета рекомендуемого предельного значения массы .
4.3.3.3.2.1 Оценка рисков путем расчета рекомендуемого предельного значения массы
a) Случай 1
Применяется следующая формула для расчета :
![]() ,
,
где - рекомендуемое предельное значение массы (расчет в процессе 2);
- коэффициент для работ, выполняемых одной рукой, -
![]() 0,6, в остальных случаях -
0,6, в остальных случаях - ![]() 1,0;
1,0;
- коэффициент для работ, выполняемых вдвоем, -
0,85, в остальных случаях -
1,0;
- коэффициент для работ, выполняемых одновременно с подъемом предмета, -
0,8, в остальных случаях -
1,0.
b) Случай 2
Если в процессе 2 при расчете в таблице 2 нет соответствующих значений для коэффициента высоты
, коэффициента подъема
, коэффициента расстояния
, коэффициента асимметрии
, коэффициента захвата
или коэффициента частоты
, то
вычисляют по формуле
![]() ,
,
где определяют из таблицы 1, а вышеуказанные коэффициенты вычисляют по формулам
| Если | |||
| Если | |||
| Если | |||
| Если | |||
При этом - допустимая масса из таблицы 1, кг;
- вертикальное положение, см;
- расстояние подъема, см;
- горизонтальное положение, см;
- угол асимметрии, ...°;
- коэффициент захвата из таблицы 2;
- коэффициент частоты из таблицы 3;
- коэффициент работ, выполняемых одной рукой, -
![]() 0,6,
0,6,
в остальных случаях - ![]() 1,0;
1,0;
- коэффициент для работ, выполняемых вдвоем, -
0,85,
в остальных случаях - 1,0;
- коэффициент для работ, выполняемых одновременно с подъемом предмета, -
0,8, в остальных случаях -
1,0.
Таблица 3 - Коэффициент частоты
Частота | Коэффициент частоты | ||||||
2 ч | 1 ч |
| |||||
Гц | ходов/мин | при вертикальном положении | |||||
|
|
|
|
|
| ||
|
| 0,85 | 0,85 | 0,95 | 0,95 | 1,00 | 1,00 |
0,00833 | 0,5 | 0,81 | 0,81 | 0,92 | 0,92 | 0,97 | 0,97 |
0,01666 | 1 | 0,75 | 0,75 | 0,88 | 0,88 | 0,94 | 0,94 |
0,03333 | 2 | 0,65 | 0,65 | 0,84 | 0,84 | 0,91 | 0,91 |
0,05000 | 3 | 0,55 | 0,55 | 0,79 | 0,79 | 0,88 | 0,88 |
0,06666 | 4 | 0,45 | 0,45 | 0,72 | 0,72 | 0,84 | 0,84 |
0,08333 | 5 | 0,35 | 0,35 | 0,60 | 0,60 | 0,80 | 0,80 |
0,10000 | 6 | 0,27 | 0,27 | 0,50 | 0,50 | 0,75 | 0,75 |
0,11666 | 7 | 0,22 | 0,22 | 0,42 | 0,42 | 0,70 | 0,70 |
0,13333 | 8 | 0,18 | 0,18 | 0,35 | 0,35 | 0,60 | 0,60 |
0,15000 | 9 | 0,00 | 0,15 | 0,30 | 0,30 | 0,52 | 0,52 |
0,16666 | 10 | 0,00 | 0,13 | 0,26 | 0,26 | 0,45 | 0,45 |
0,18333 | 11 | 0,00 | 0,00 | 0,00 | 0,23 | 0,41 | 0,41 |
0,20000 | 12 | 0,00 | 0,00 | 0,00 | 0,21 | 0,37 | 0,37 |
0,21666 | 13 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,34 |
0,23333 | 14 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,31 |
0,25000 | 15 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,28 |
|
| 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 |
Коэффициент риска вычисляют по формуле
![]() .
.
4.3.3.3.3 Необходимые мероприятия (шаг 3)
Риск можно рассматривать:
- как приемлемый (зеленый), если 0,85.
- как значительный (желтый), если 0,85![]() 1,0. При этом необходимо:
1,0. При этом необходимо:
машину перекомпоновать заново либо
обеспечить условия, при которых риск становится приемлемым.
- как недопустимый (красный), если 1,0. При этом требуется перекомпоновка. В результате которой должны увеличиться коэффициенты при расчете
.
4.4 Информация для пользователя
Изготовитель должен предоставить пользователю руководство по эксплуатации машины, содержащее рекомендации для всех этапов ее жизненного цикла (изготовления, транспортирования, ввода в эксплуатацию, производства и вывода из эксплуатации). Эти рекомендации должны учитывать квалификацию оператора.
Руководство по эксплуатации должно соответствовать ЕН 292-2 [раздел 5 и приложение А (пункт 1.7.4)].
a) Общая информация:
- основное назначение,
- информация о возможном применении,
- риски и ограничения,
- предостережения о рисках, возникающих при использовании машин,
- необходимые меры, которые должен предпринять потребитель;
b) Использование по назначению:
- потребность в площадях,
- условия установки и требования к фундаменту,
- условия для устранения дискомфорта, усталости и нагрузок,
- обслуживание,
- утилизация отходов;
c) Масса предметов:
- максимальная масса груза,
- последствия ручного перемещения грузов;
d) Техническое оснащение:
- когда должны применяться технические средства,
- какие требования должны соблюдаться при использовании машин (с примерами),
- применение технических средств;
e) Обозначения:
- если масса груза более 25 кг, на машине или грузе следует сделать обозначение,
- распределение массы, если оно неравномерно,
- место обозначения (на грузе, на упаковке),
- наличие таблички с ограничениями по применению,
- наличие таблички с предупреждениями при изменяемых центрах тяжести предмета (например, жидкости),
- предупреждение по упаковочному материалу;
f) Прочие рекомендации:
- какое техническое исполнение оборудования должно быть применено,
- описание рабочих процессов и предусмотренной рабочей практики,
- условия для изготовления, транспортировки, монтажа и ввода в эксплуатацию, производства и демонтажа,
- запреты по применению.
Руководство по эксплуатации должно быть сброшюровано в одну книгу.
Приложение А
(справочное)
Категории трудоспособного населения и изложение системы
А.1 Категории трудоспособного населения
Представленная здесь таблица А.1 действительна для всего трудоспособного населения. Данные согласуются с результатами измерения максимальной мощности, субъективными оценками пределов перегрузки и объективными измерениями физиологических показателей*.
_____________
* Применяемость этих данных ограничена, и было бы неуместно считать эти значения точными предельными значениями.
Таблица А.1 - Взаимосвязь между допустимой массой грузов и категориями трудоспособного населения
Варианты нагрузки | Допустимая граница по психофизическим данным | Измерение предельных нагрузок | Измерение максимального изменения трудоспособности |
10 кг | 99% (женщины + мужчины) | 99% (женщины + мужчины) | 99% (женщины + мужчины) |
99% женщины | 99% женщины | 99% женщины | |
99,9% мужчины | 99,9% мужчины | 99,9% мужчины | |
20 кг | 95% (женщины + мужчины) | 95% (женщины + мужчины) | 95% (женщины + мужчины) |
90% женщины | 90% женщины | 80% женщины | |
99,9% мужчины | 99,9% мужчины | 99% мужчины | |
25 кг | 85% (женщины + мужчины) | 85% (женщины + мужчины) | 85% (женщины + мужчины) |
75% женщины | 72% -75% женщины | 70% женщины | |
99,9% мужчины | 99,9% мужчины | 99% мужчины |
Дополнительно к таблице А.1 было установлено, что повышенный риск повреждений существует в следующих группах населения: молодежь, пожилые люди, беременные и лица, у которых уже имеются заболевания опорно-двигательного аппарата. Поднимаемая масса грузов для беременных, регулярно выполняющих ручные операции по подъему предметов, должна быть не более 5 кг, а для молодежи и пожилых людей такая масса не должна превышать 15 кг.
А.2 Изложение системы
При выполнении оператором определенного монотонного задания следует учитывать нижеследующие по степени важности пункты:
А.2.1 Неподвижное положение тела работающего
При выполнении монотонной работы, когда требуется неподвижное положение тела, необходимо предусмотреть возможность некоторого изменения способа выполнения рабочего задания, так как такие условия быстро приводят к утомляемости и дискомфорту, а также к снижению работоспособности мышц. В этих случаях необходимо переоборудовать машины так, чтобы свести к минимуму неподвижное положение тела при работе.
А.2.2 Ускорения и точность движений
Необходимость больших ускорений приводит к перегрузкам тела рабочего, а при возрастании точности движений оператора затрачивается больше времени на ручные операции, требуется увеличение мускульных усилий, поэтому точность движений оператора должна достигаться благодаря соответствующим конструкторским решениям машины.
А.2.3 Дискомфорт, мускульная усталость и нагрузки
Исследования и опыт в промышленности показывают, что предупреждающие мероприятия против дискомфорта, мускульной усталости и нагрузок во время выполнения ручных работ снижают риски для здоровья работающего и повышают производительность его труда. Здесь важно принимать во внимание три фактора:
a) требуемое физиологическое напряжение;
b) объем работ, выполняемых при неподвижно-напряженном положении тела;
c) широкий разброс индивидуальных предрасположенностей к утомлению.
Приложение В
(рекомендуемое)
Рекомендуемые требования к температурному комфорту
Рекомендуется в связи с требованиями к температурному комфорту применять ЕН ИСО 7730.
Рекомендуемые предельные значения для требований к температурному комфорту во время выполнения ручных операций следующие: температура - 19 °С -26 °С; влажность воздуха - 30% -70%, скорость ветра - 0,2 м/с.
Приложение С
(справочное)
Рабочие листки для оценки рисков
Описываемая модель оценки рисков включает в себя три процесса, различающихся по сложности их применения. Процесс 1 - это предварительный анализ. Процесс 2, простой управляемый метод, должен применяться, если при предварительном анализе выявлены риски. Процесс 2 учитывает дополнительные факторы риска. Оценку рисков рекомендуется начинать с процесса 1 (простейший метод), а процессы 2 и 3 применять, только если условия или расчетные варианты нагрузки не определяются во время процесса 1.
Каждый процесс требует трехступенчатого применения:
шаг 1. Выбор допустимой массы с учетом групп населения (см. таблицу С.1);
шаг 2. Оценка факторов риска согласно рабочему листку для оценки риска;
шаг 3. Необходимые мероприятия:
- никаких мероприятий при приемлемом уровне рисков,
- перекомпоновка машины заново при неприемлемом уровне рисков или обеспечение условий для уменьшения рисков,
- применение сложных методов оценки рисков.
Таблица С.1 - Допустимая масса груза для разных групп населения
Область применения |
| Процентное отношение | Группы населения | |||
мужчины и женщины | женщины | мужчины | ||||
Бытовое использование | 5 | - | Дети и пожилые люди | Население в целом | ||
10 | 99 | Население в целом, бытовое применение машин | ||||
Производственное использование (общее) | 15 | 95 | 90 | 99 | Трудоспособное население в целом, включая пожилых людей и молодежь | Трудоспо- собное население в целом |
25 | 85 | 70 | 90 | Взрослое трудоспособное население | ||
Производственное использование (специализированное) | 30 | - | Специальные группы трудоспособного населения | Специальные группы трудоспособного населения | ||
35 | ||||||
40 | ||||||
| ||||||
Рабочий листок 1
Оценка рисков. Процесс 1 - предварительный анализ на основании случаев критической нагрузки | ||
ЕН 1005 Безопасность машин. Физические возможности человека | ||
Настоящий процесс представляет собой быстрый предварительный анализ, позволяющий установить, представляет ли риск для здоровья оператора выполняемый им ручной труд. Процесс 2 требует выбора критических нагрузок (случаи 1-3). Ограничивающим условием является то, что должны быть указаны предпосылки ручного труда. | ||
Шаг 1. Выбор общей допустимой массы Следует определить группу населения и выбрать допустимую массу | ||
Шаг 2. Оценка риска Определить одну из следующих предпосылок использования ручного труда, если они имеются: - работа выполняется только двумя руками; - неограниченное положение тела и неограниченные движения; - работа выполняется только одним человеком; - равномерный подъем без толчков; - хорошие условия захвата предмета руками; - хорошая устойчивость оператора; - другие ручные операции, выполняемые одновременно с подъемом предмета, сведены к минимуму; - поднимаемые предметы не слишком холодные, горячие или грязные; - температура окружающей среды равномерная. Если нет хотя бы одной из указанных предпосылок, следует применить детализированный процесс 2. Если имеются все предпосылки, следует определить, соответствуют ли они требованиям критической нагрузки для 8-часовой смены или меньшего периода рабочего времени. | ||
Случай 1 | критическая масса - масса переносимых вручную предметов не более 70% приведенной в таблице 1; - высота подъема груза не более 25 см, а груз поднимается от бедра на высоту плеч; - корпус тела прямой, не поворачивается; - груз удерживается вблизи корпуса тела; - частота подъема равномерная или меньше 3,33·10 | |
Случай 2 | критическое расстояние подъема - масса переносимых вручную предметов не более 60% приведенной в таблице 1; - груз поднимается от колена на высоту плеч; - корпус тела прямой, не поворачивается; - груз удерживается вблизи корпуса тела; - частота подъема равномерная или меньше 3,33·10 | |
Случай 3 | критическая частота - масса переносимых вручную предметов не более 30% приведенной в таблице 1; - высота подъема груза не более 25 см, а груз поднимается от бедра на высоту плеч; - частота подъема равномерная или меньше 0,08 Гц (пять подъемов в мин); - корпус тела прямой, не поворачивается; - груз удерживается вблизи корпуса тела или - масса переносимых вручную предметов не более 50% приведенной в таблице 1; - высота подъема груза не более 25 см, а груз поднимается от бедра на высоту плеч; - частота подъема равномерная или меньше 0,04 Гц (2,5 подъема в мин); - корпус тела прямой, не поворачивается; - груз удерживается вблизи корпуса тела. | |
Шаг 3. Необходимые мероприятия Если конструкция соответствует описанным случаям критических нагрузок (случаи 1-3), то риск оценивается как приемлемый. Если конструкция не соответствует таким случаям или не созданы предпосылки, описанные в шаге 2, необходимо либо изменить конструкцию машины, либо применить детализированные процессы оценки рисков (процесс 2). | ||
Рабочий листок 2а
Оценка рисков. Процесс 2 - оценка на основе таблиц |
ЕН 1005 Безопасность машин. Физические возможности человека |
Шаг 1. Выбор допустимой массы Следует определить группу населения и выбрать допустимую массу |
Шаг 2. Оценка риска Отметьте крестиком следующие предпосылки использования ручного труда, если они имеются: - работа выполняется только двумя руками; - неограниченное положение тела и неограниченные движения; - работа выполняется только одним человеком; - равномерный подъем без толчков; - хорошая устойчивость оператора; - другие ручные операции, выполняемые одновременно с подъемом предмета, сведены к минимуму; - поднимаемые предметы не слишком холодные, горячие или грязные; - температура окружающей среды равномерная. Если нет хотя бы одной из указанных предпосылок, следует применить детализированный процесс 3. Если имеются все предпосылки: 1) расчет рекомендуемого предельного значения массы 2) расчет коэффициента риска
|
Шаг 3. Необходимые мероприятия Риск рассматривают: - как приемлемый (зеленый), если - как значительный (желтый), если 0,85 применить процесс 3 с целью установить, как можно избежать риска, машину перекомпоновать заново либо обеспечить условия, при которых риск становится приемлемым. - как недопустимый (красный), если |
Рабочий листок 2b
Оценка рисков. Процесс 2 - оценка на основе таблиц |
EH 1005 Безопасность машин. Физические возможности человека |
Таблица С.2 - Расчет рекомендуемых предельных значений массы
Допустимая масса
Допустимая масса, кг (см. таблицу С.1) |
| |||||||||||
| ||||||||||||
Вертикальная позиция | 0 | 25 | 50 | 75 | 100 | 130 |
|
| ||||
Значение коэффициента | 0,78 | 0,85 | 0,93 | 1,00 | 0,93 | 0,84 | 0,00 | |||||
Коэффициент подъема | ||||||||||||
Расстояние подъема | 25 | 30 | 40 | 50 | 70 | 100 |
|
| ||||
Значение коэффициента | 1,00 | 0,97 | 0,93 | 0,91 | 0,88 | 0,87 | 0,00 | |||||
Коэффициент расстояния | ||||||||||||
Горизонтальная позиция | 25 | 30 | 40 | 50 | 56 | 60 |
|
| ||||
Значение коэффициента | 1,00 | 0,83 | 0,63 | 0,50 | 0,45 | 0,42 | 0,00 | |||||
| ||||||||||||
Угол асимметрии | 0 | 30 | 60 | 90 | 120 | 135 |
|
| ||||
Значение коэффициента | 1,00 | 0,90 | 0,81 | 0,71 | 0,62 | 0,57 | 0,00 | |||||
Коэффициент захвата | ||||||||||||
Качество захвата | Хорошее | Умеренное | Плохое | |||||||||
Описание | Длина захвата Легко переносимые вручную детали имеют рукоятки, не повреждающие руки | Длина захвата Легко переносимые вручную детали и не чрезмерный изгиб рук | Длина захвата | |||||||||
Значение коэффициента | 1,00 | 0,95 | 0,90 | |||||||||
Коэффициент частоты | ||||||||||||
Частота | Гц | 0,0033 | 0,0166 | 0,0666 | 0,1000 | 0,1500 | 0,2000 |
| ||||
ходов/мин | 0,20 | 1 | 4 | 6 | 9 | 12 |
| |||||
Значение коэффи- циента | Длительность работы | 1,00 | 0,94 | 0,84 | 0,75 | 0,52 | 0,37 | 0,00 | ||||
1 ч | 0,95 | 0,88 | 0,72 | 0,50 | 0,30 | 0,00 | 0,00 | |||||
2 ч | 0,85 | 0,75 | 0,45 | 0,27 | 0,00 | 0,00 | 0,00 | |||||
= | ||||||||||||
| = | кг | ||||||||||
Рабочий листок 3а
Оценка рисков. Процесс 3 - Оценка на основе формул | ||||
ЕН 1005 Безопасность машин. Физический труд человека | ||||
Шаг 1. Выбор допустимой массы Следует определить группу населения и выбрать допустимую массу | ||||
Шаг 2. Оценка риска Отметьте крестиком следующие предпосылки использования ручного труда, если они имеются: - неограниченное положение тела и неограниченные движения; - равномерный подъем без толчков; - хорошая устойчивость оператора; - поднимаемые предметы не слишком холодные, горячие или грязные; - температура окружающей среды равномерная. Если нет хотя бы одной из указанных предпосылок, следует обеспечить условия, при которых риск становится приемлемым (см. раздел 4). Если имеются все предпосылки, необходимо рассчитать рекомендуемое предельное значение массы | ||||
Случай 1 | Если рекомендуемое предельное значение массы
где
| |||
Случай 2 | Если рекомендуемое предельное значение массы
коэффициенты | |||
| Если | |||
| Если | |||
| Если | |||
| Если | |||
| ||||
Коэффициент риска Коэффициент риска | ||||
Шаг 3. Необходимые мероприятия Риск рассматривают: - как приемлемый (зеленый), если - как значительный (желтый), если 0,85 применить процесс 3 с целью установить, как можно избежать риска, машину перекомпоновать заново либо обеспечить условия, при которых риск становится приемлемым. - как недопустимый (красный), если | ||||
Рабочий листок 3b
Оценка рисков. Процесс 3 - Оценка на основе формул |
ЕН 1005 Безопасность машин. Физические возможности человека |
Таблица С.3 - Коэффициент захвата
Качество захвата | Хорошее | Умеренное | Плохое |
Описание | Длина захвата | Длина захвата | Длина захвата Тяжело переносимые вручную детали, несимметричное расположение центра тяжести, плохая возможность захвата или использование перчаток |
Значение коэффициента | 1,00 | 0,95 | 0,90 |
Таблица С.4 - Коэффициент частоты
Частота | Коэффициент частоты | ||||||
2 ч | 1 ч |
| |||||
Гц | ходов/мин | при вертикальном положении | |||||
|
|
|
|
|
| ||
|
| 0,85 | 0,85 | 0,95 | 0,95 | 1,00 | 1,00 |
0,00833 | 0,5 | 0,81 | 0,81 | 0,92 | 0,92 | 0,97 | 0,97 |
0,01666 | 1 | 0,75 | 0,75 | 0,88 | 0,88 | 0,94 | 0,94 |
0,03333 | 2 | 0,65 | 0,65 | 0,84 | 0,84 | 0,91 | 0,91 |
0,05000 | 3 | 0,55 | 0,55 | 0,79 | 0,79 | 0,88 | 0,88 |
0,06666 | 4 | 0,45 | 0,45 | 0,72 | 0,72 | 0,84 | 0,84 |
0,08333 | 5 | 0,35 | 0,35 | 0,60 | 0,60 | 0,80 | 0,80 |
0,10000 | 6 | 0,27 | 0,27 | 0,50 | 0,50 | 0,75 | 0,75 |
0,11666 | 7 | 0,22 | 0,22 | 0,42 | 0,42 | 0,70 | 0,70 |
0,13333 | 8 | 0,18 | 0,18 | 0,35 | 0,35 | 0,60 | 0,60 |
0,15000 | 9 | 0,00 | 0,15 | 0,30 | 0,30 | 0,52 | 0,52 |
0,16666 | 10 | 0,00 | 0,13 | 0,26 | 0,26 | 0,45 | 0,45 |
0,18333 | 11 | 0,00 | 0,00 | 0,00 | 0,23 | 0,41 | 0,41 |
0,20000 | 12 | 0,00 | 0,00 | 0,00 | 0,21 | 0,37 | 0,37 |
0,21666 | 13 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,34 |
0,23333 | 14 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,31 |
0,25000 | 15 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,28 |
|
| 0,00 | 0,00 | 0,00 | 0,00 | 0,00 | 0,00 |
Приложение D
(обязательное)
Сведения о соответствии ссылочных международных стандартов
межгосударственным стандартам
Таблица D.1
Обозначение ссылочного международного стандарта | Обозначение и наименование |
ЕН 292-2:1991 | ГОСТ ИСО/ТО 12100-2-2002 Безопасность оборудования. Основные понятия, общие принципы конструирования. Часть 2. Технические правила и технические требования |
EH 614-1 | * |
EH 1005-1:2001 | * |
EH 1005-3 | * |
EH 1005-4 | * |
EH 1050 | ГОСТ ЕН 1050 Безопасность машин. Принципы оценки и определение риска |
EH 1070 | ГОСТ ЕН 1070-2003 Безопасность оборудования. Термины и определения |
EH ИСО 7730 | * |
EHV 26385 | * |
* Соответствующий межгосударственный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта или гармонизированный с ним национальный (государственный) стандарт страны, на территории которой применяется настоящий стандарт. Информация о наличии перевода данного международного стандарта в национальном фонде стандартов или в ином месте, а также информация о действии на территории страны соответствующего национального (государственного) стандарта может быть приведена в национальных информационных данных, дополняющих настоящий стандарт. | |
Электронный текст документа
и сверен по:
, 2007
{kind=link}