ГОСТ Р 60.6.3.22-2021/МЭК/АСТМ 62885-7:2020
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
РОБОТЫ-ПЫЛЕСОСЫ БЫТОВОГО И АНАЛОГИЧНОГО НАЗНАЧЕНИЯ
Методы измерения рабочих характеристик
Robots and robotic devices. Dry-cleaning robots for household and similar use. Methods for measuring the performance
ОКС 97.080
Дата введения 2021-09-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным автономным научным учреждением "Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики" (ЦНИИ РТК) совместно с Обществом с ограниченной ответственностью "Открытая Робототехника" (ООО "Открытая Робототехника") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 "Робототехника"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 22 июня 2021 г. N 574-ст
4 Настоящий стандарт идентичен международному стандарту МЭК/АСТМ 62885-7:2020* "Приборы для чистки поверхности. Часть 7. Роботы для сухой чистки бытового и аналогичного назначения. Методы измерения рабочих характеристик" (IEC/ASTM 62885-7:2020 "Surface cleaning appliances - Part 7: Dry cleaning robots for household and similar use - Methods for measuring performance", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5) и для увязки с наименованиями, принятыми в существующем комплексе национальных стандартов Российской Федерации.
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Требования стандартов комплекса ГОСТ Р 60 распространяются на роботов и робототехнические устройства. Целью стандартов является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов, узлов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: "Общие положения, основные понятия, термины и определения", "Технические и эксплуатационные характеристики", "Безопасность", "Виды и методы испытаний", "Механические интерфейсы", "Электрические интерфейсы", "Коммуникационные интерфейсы", "Методы моделирования и программирования", "Методы построения траектории движения (навигация)", "Конструктивные элементы". Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации - промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам, сервисным мобильным роботам, а также к морским робототехническим комплексам.
Настоящий стандарт относится к тематической группе "Виды и методы испытаний" и распространяется на сервисных мобильных роботов для сухой чистки бытового и аналогичного назначения. Он идентичен международному стандарту МЭК/АСТМ 62885-7:2020, разработанному подкомитетом (ПК) 59F "Приборы для очистки поверхностей" Технического комитета (ТК) 59 МЭК "Характеристики бытовых и аналогичных электроприборов" совместно с комитетом F11 АСТМ "Пылесосы".
Настоящий стандарт определяет рабочие характеристики роботов-пылесосов бытового назначения и методы испытаний для их оценки. Перечень рабочих характеристик, рассмотренных в данном стандарте, не является исчерпывающим. К рабочим характеристикам роботов-пылесосов, которые когда-либо рассматривались, но не вошли в настоящий стандарт, относятся: сбор пыли в углах и на краях, стыковка с док-станцией, предотвращение падения и повторное распространение пыли. Данные характеристики, по мере разработки методов испытания для их оценки, будут включены в последующие издания настоящего стандарта.
1 Область применения
Требования настоящего стандарта распространяются на сервисные мобильные роботы-пылесосы, предназначенные для применения в домашних или аналогичных условиях.
Настоящий стандарт определяет основные рабочие характеристики роботов-пылесосов, представляющие интерес для пользователей, и методы испытания для их измерения.
Требования настоящего стандарта не распространяются на требования безопасности и на требования, предъявляемые к рабочим характеристикам.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие международные стандарты (для датированных ссылок следует использовать указанное издание ссылочного стандарта, для недатированных - последнее издание, включая все изменения):
IEC 62301, Household electrical appliances - Measurement of standby power (Бытовые электрические приборы. Измерение потребляемой мощности в режиме ожидания)
IEC/TS 62885-1, Surface cleaning appliances - Part 1: General requirements on test material and test equipment (Приборы для чистки поверхности. Часть 1. Общие требования к материалам и оборудованию для испытаний)
IEC 62885-2:2016, Surface cleaning appliances - Part 2: Dry vacuum cleaners for household and similar use - Methods for measuring the performance (Приборы для чистки поверхности. Часть 2. Пылесосы для сухой чистки бытового и аналогичного назначения. Методы измерения рабочих характеристик)
IEC 60704-1, Household and similar electrical appliances - Test code for the determination of airborne acoustical noise - Part 1: General requirements (Электрические приборы бытового и аналогичного назначения. Методы испытаний для определения присутствующего в воздухе акустического шума. Часть 1. Общие требования)
IEC 60704-2-17, Household and similar electrical appliances - Test code for the determination of airborne acoustical noise - Part 2-17: Particular requirements for dry cleaning robots (Электрические приборы бытового и аналогичного назначения. Методы испытаний для определения присутствующего в воздухе акустического шума. Часть 2-17. Частные требования к роботам для сухой чистки)
ISO 554, Standard atmospheres for conditioning and/or testing - Specifications (Стандартные атмосферы для кондиционирования и/или испытаний. Технические требования)
ISO 2813, Paints and varnishes - Determination of gloss value at 20 degrees, 60 degrees and 85 degrees (Краски и лаки. Определение блеска под углом 20°, 60° и 85°)
3 Термины и определения
В настоящем стандарте применены термины по МЭК 62885-2, а также следующие термины с соответствующими определениями.
ИСО и МЭК поддерживают терминологические базы данных для использования в документах по стандартизации по следующим адресам:
- Электропедия МЭК доступна по адресу http://www.electropedia.org/;
- платформа ИСО для онлайн-просмотра доступна по адресу http://www.iso.org/obp.
3.1 робот-уборщик (автоматический уборщик с питанием от аккумуляторной батареи) [cleaning robot (automatic battery-powered cleaner)]: Устройство для автоматической уборки пола, работающее автономно без вмешательства человека в пределах заданного периметра.
Примечание - Робот-уборщик включает мобильный узел, а также может иметь док-станцию и/или другие аксессуары, помогающие ему в работе.
3.2 робот-пылесос (dry cleaning robot): Робот-уборщик, предназначенный для удаления только нежидких субстанций с пола с помощью средств, отличных от растворов и жидкостей.
Примечание - Типичными средствами для сухой очистки являются вакуум, щетки, насадки и пылеуловитель.
3.3 чистящая головка робота (чистящая головка) [robot cleaning head (cleaning head)]: Всасывающее сопло в днище робота-уборщика.
Примечание - Боковые щетки не являются частью чистящей головки.
3.4 ширина чистящей головки робота W (width of robot cleaning head; W): Ширина всасывающего сопла в направлении движения вперед.
3.5 док-станция (базовый блок) [docking station (base unit)]: Блок, обеспечивающий ручную или автоматическую зарядку аккумуляторной батареи, удаление пыли из робота, обработку данных или выполнение других функций, поддерживающих работу робота.
Примечание - У некоторых роботов док-станция может представлять собой внешний источник питания.
3.6 система отслеживания пространственного расположения; СОПР (pose tracking system; PTS): Измерительная система, позволяющая отслеживать позицию и ориентацию робота-уборщика.
3.7 пылесборник (dust receptacle): Контейнер внутри робота-уборщика, используемый для хранения собранной пыли.
3.8 этап испытания (test instance): Совокупность или полный комплект всех попыток со всеми образцами, которые должны быть проведены для одной модели робота-уборщика.
3.9 попытка (trial): Однократное измерение рабочей характеристики, выполняемое при одинаковых условиях, которое может быть повторено несколько раз.
3.10 запуск (run): Часть попытки, в которой изменяют один или несколько факторов, влияющих на результаты испытания.
3.11 проход (pass): Однократное прохождение чистящей головки по испытательной зоне.
Примечание - Число проходов соответствует числу прохождений чистящей головки по одной и той же испытательной зоне.
3.12 испытательная зона (test area): Зона, в которой нанесены пыль, мусор или волокна для испытания по очистке поверхности.
3.13 уилтонский ковер (Wilton carpet): Ковер, определенный в IEC/TS 62885-1.
3.14 полностью заряжено (fully charged): Момент в процессе зарядки, когда в соответствии с инструкциями изготовителя с помощью индикатора или периода времени определяют, что изделию дальнейшая зарядка не требуется.
3.15 полностью разряжено (fully discharged): Момент в процессе работы, когда в соответствии с инструкциями изготовителя изделие полностью разряжено или робот не может возобновить работу.
3.16 боковая щетка (side brush): Периферическая вращающаяся щетка, основной функцией которой является перемещение пыли и мусора по полу и расширение зоны очистки за пределы ширины чистящей головки робота.
4 Общие условия проведения испытаний
4.1 Общие положения
При проведении испытаний любые внешние воздействия, влияющие на функции робота-уборщика (например, на датчики, процессоры и приводы), должны быть минимизированы.
4.2 Атмосферные условия
Процедуры проведения испытаний и измерения следует выполнять при следующих атмосферных условиях (в соответствии с ИСО 554).
Испытание для определения рабочих характеристик уборки:
- температура: (23±2)°С;
- относительная влажность: (50±5)%;
- атмосферное давление: от 86 кПа до 106 кПа.
Все другие испытания:
- температура: (23±5)°С;
- относительная влажность: (45±15)%;
- атмосферное давление: от 86 кПа до 106 кПа.
Условия температуры и влажности в пределах указанных диапазонов необходимы для хорошей повторяемости и воспроизводимости результатов. Следует обратить внимание на недопустимость их изменения во время испытаний.
4.3 Условия освещенности
Если не указано иное, то процедуры проведения испытаний и измерения следует выполнять при следующих условиях освещенности:
- интенсивность: (200±50) лк;
- цветовая температура: от 2000 К до 7000 К.
Измерения должны быть произведены на уровне пола.
Примечание - Условия освещенности для испытания автономной навигации/покрытия (раздел 7) отличаются от общих условий освещенности, которые определены в 9.3.3.
4.4 Испытательное оборудование и материалы
Для того чтобы минимизировать влияние электростатических явлений, измерения на коврах должны быть произведены на уровне пола, покрытого гладкой необработанной сосновой клееной фанерой или эквивалентными панелями толщиной не менее 15 мм и размером, подходящим для испытания.
Если не указано иное, то оборудование и материалы для измерений (приборы, испытательные ковры, испытательная пыль и т.п.), используемые при испытаниях, до начала испытаний должны быть выдержаны в течение не менее 16 часов при стандартных атмосферных условиях в соответствии с видом испытания (см. 4.2).
Ковры, которые уже использовались, следует хранить выбитыми при стандартных атмосферных условиях согласно 4.2.
Если ковры не используются, то они должны свободно висеть или ровно лежать ворсом вверх и непокрытыми. Ковры не должны быть свернуты при хранении между испытаниями. Ковры, которые были свернуты, перед использованием должны быть ровно разложены и выдержаны в таком положении в течение не менее 16 часов.
4.5 Число образцов
Все измерения рабочих характеристик следует проводить на одном и том же образце (или образцах) робота-уборщика с приспособлениями (при их наличии). Во время серии испытаний образец робота не должен быть заменен.
Не менее трех образцов одной модели должны быть испытаны.
Если это возможно, то программное обеспечение должно быть обновлено до последней версии, доступной для данного робота в регионе покупки, в соответствии с инструкциями изготовителя.
Дата изготовления, сериальный номер и версия программного обеспечения образцов должны быть указаны в протоколе (при наличии этих данных).
4.6 Подготовка аккумуляторной батареи
Любая неиспользованная литий-ионная аккумуляторная батарея должна пройти один цикл полного заряда и полного разряда на роботе-уборщике до первого испытания. Любая неиспользованная аккумуляторная батарея другого типа должна быть полностью заряжена и полностью заряжена три раза на роботе-уборщике до первого испытания.
Полный разряд должен быть осуществлен с помощью выполнения одной или нескольких обычных операций по уборке в чистой зоне в соответствии с инструкциями изготовителя до тех пор, пока робот не прекратит работу. Следует удалить зарядную станцию, если она задействована, чтобы обеспечить полный разряд.
Примечание - Понятно, что некоторые роботы не допускают разряд ниже определенного уровня с целью защиты батареи. Полный разряд определяют либо по сигналу о низком уровне заряда батареи, если робот неподвижен, либо по прекращению работы робота и невозможности ее возобновления.
4.7 Обкатка нового робота-пылесоса
До первого испытания нового робота-уборщика он должен проработать в соответствии с 4.6 в течение одного цикла аккумуляторной батареи. Перед проведением любой серии испытаний возраст, состояние и история изделия должны быть зафиксированы в протоколе.
4.8 Эксплуатация робота-уборщика
Если не указано иное, то должно быть выполнено следующее:
- до проведения испытаний робот-уборщик, его приспособления, док-станция и любые аксессуары должны быть использованы и отрегулированы в соответствии с инструкциями изготовителя;
- режим работы робота может быть выбран и настроен только в соответствии с опубликованными инструкциями изготовителя до начала испытаний, чтобы привести его в соответствие со средой, которая подлежит очистке.
Режим работы и значения параметров, использованные при проведении испытаний, должны быть зарегистрированы в протоколе испытаний.
Любое устройство, связанное с обеспечением безопасности, должно быть в работоспособном состоянии.
4.9 Измерение веса собранной пыли
Некоторые многоразовые пылесборники состоят из жесткого контейнера и встроенного фильтра. В данном случае контейнер и фильтр рассматривают как пылесборник и их следует считать единым компонентом.
Пылесборник и заменяемые фильтрующие элементы следует аккуратно извлечь из робота и вместе взвесить.
У роботов-уборщиков, оборудованных разделительными устройствами, которые являются частью изделия и предназначены для разделения пыли и воздушного потока и/или имеют дополнительные фильтры, которые должны быть заменены или очищены пользователем без использования инструментов, вес таких особых устройств должен быть учтен при оценке способности робота удалять пыль.
Роботы-уборщики с одноразовыми или многоразовыми пылесборниками могут иметь устройства вторичной фильтрации, которые не собирают значительного количества пыли при испытаниях способности робота удалять пыль, но которые влияют на испытания фильтрации и срока службы. Замену и/или техническое обслуживание данных устройств следует осуществлять согласно требованиям соответствующих разделов настоящего стандарта и инструкциям изготовителя.
4.10 Разрешение и точность измерений
Если в методах испытаний не указано иное, то разрешение и точность измерительного прибора должны быть следующими.
При измерении веса:
Измерение удаления волокон:
- разрешение 0,001 г;
- точность 0,005 г.
Все другие измерения:
- разрешение 0,01 г;
- точность 0,02 г.
Рекомендуемые параметры измерения положения системой отслеживания пространственного расположения:
- разрешение по позиции 1 см;
- точность измерения позиции 1 см;
- разрешение по ориентации 0,1°;
- точность измерения ориентации 3°;
- частота отсчетов 30 Гц.
При измерении времени:
- разрешение 0,1 с;
- точность 0,2 с.
Частота отсчетов системы отслеживания пространственного расположения должна обеспечивать указанные выше точности динамического измерения позиции.
4.11 Допуски размеров
Для всех размеров, которые не представлены диапазонами и для которых не заданы допуски, допуски должны быть определены по таблице 1.
Таблица 1 - Допуски размеров
Диапазон номинального размера, мм | Допуск, мм |
3 | ±0,5 |
>6 | ±1,0 |
>30 | ±1,5 |
>120 | ±2,5 |
>400 | ±4,0 |
>1000 | ±6,0 |
>2000 | ±8,0 |
Примечание - Значения взяты из ИСО 2768-1:1989, таблица 1. | |
5 Рабочие характеристики уборки - движение по прямой
5.1 Общие положения
Данное испытание предназначено для того, чтобы отделить рабочие характеристики чистящей системы робота от функции автономного перемещения с номинальной скоростью. Это позволяет оценить только способность робота удалять пыль, волокна, мусор среднего размера и мусор большого размера. Это облегчает непосредственное сравнение роботов-уборщиков. Если боковые щетки съемные, то они должны быть сняты при всех испытаниях, определенных в разделе 5.
Примечание - Метод испытаний для оценки влияния (или эффективности) боковых щеток будет определен в последующих редакциях настоящего стандарта.
5.2 Подготовка испытания
5.2.1 Предварительная очистка робота-уборщика
Если робот-уборщик спроектирован для использования одноразовых пылесборников, то до начала каждого испытания он должен быть снабжен новым пылесборником, рекомендуемым или поставляемым изготовителем робота-уборщика.
Если робот-уборщик оснащен многоразовым пылесборником (в виде одного оригинального пылесборника или в виде оболочки для одноразовых пылесборников), то до начала каждого испытания пылесборник должен быть очищен в соответствии с инструкциями изготовителя так, чтобы его вес отклонялся не более чем на 1% или 2 г от его исходного веса, в зависимости от того, какая из этих двух величин меньше.
Пылесборник, изготовленный из ткани, не допускается очищать с помощью щетки или воды, если только это не разрешено инструкциями изготовителя.
Пластмассовый пылесборник должен быть очищен согласно инструкциям, приведенным в руководстве пользователя. Если пылесборник очищают водой, то он должен быть хорошо высушен до начала любого испытания и измерения.
Некоторые многоразовые пылесборники состоят из жесткого контейнера и встроенного фильтра. В данном случае контейнер и фильтр рассматривают как пылесборник и их следует считать единым компонентом.
Весь робот, включая элементы для сбора пыли, должен быть подготовлен в соответствии с 4.4 для того, чтобы избежать влияния влажности.
Перед началом каждой попытки сменные фильтр(ы) и элементы для сбора пыли (например, протирочная прокладка) робота (или вторичной системы сбора пыли) должны быть заменены новыми образцами.
Аккумуляторная батарея должна быть полностью перезаряжена перед каждой попыткой в соответствии с инструкциями изготовителя.
5.2.2 Предварительная подготовка испытательного пола
Испытательный пол должен быть очищен перед каждой попыткой.
5.2.3 Предварительная очистка испытательного ковра
5.2.3.1 Общие положения
Любой новый ковер перед проведением регистрируемого испытания должен быть предварительно подготовлен в соответствии с IEC/TS 62885-1.
5.2.3.2 Подготовка испытательного ковра
Перед каждой попыткой испытательный ковер должен быть очищен, чтобы удалить оставшуюся пыль, и предварительно обработан, как указано ниже. Для очистки испытательного ковра рекомендуется использовать подходящую машину для выбивания ковров, например описанную в МЭК 62885-2:2016, 5.3.3.2.
Если машина для выбивания ковров не может быть использована, то ковер должен быть помещен ворсом вниз на твердую сетчатую раму и выбит вручную или с использованием активной насадки. После выбивания для удаления оставшейся пыли необходимо выполнить один цикл из пяти двойных проходов на скорости (0,50 ± 0,02) м/с пылесосом, имеющим хорошую способность к удалению пыли, по испытательной зоне, зоне ускорения и зоне торможения так, чтобы движение вперед осуществлялось в направлении ворса ковра (направлении его изготовления). Вся испытательная зона, зона ускорения и зона торможения должны быть очищены пылесосом.
5.2.3.3 Проверка и предварительная подготовка испытательного ковра
После очистки испытательного ковра испытываемый робот-уборщик должен быть снабжен чистым пылесборником (см. 5.2.1) и использован для проверки того, что ковер очищен до состояния, при котором пыль с него больше не собирается. Данное состояние считают достигнутым, если масса пыли, собранной с ковра за одну попытку, состоящую из пяти проходов по испытательной зоне (см. 5.5.3 за исключением нанесения пыли), не превышает 0,2 г. Если масса собранной пыли превышает 0,2 г, то данный шаг повторяют до тех пор, пока данное требование не будет выполнено.
Примечание - Даже если известно, что оборудование для удаления оставшейся пыли с ковра достаточно надежно для того, чтобы привести ковер в приемлемое состояние, все же важно выполнить данную процедуру предварительной подготовки, чтобы минимизировать влияние влажности на ковер.
Для предотвращения постепенного наполнения ковра пылью вес испытательного ковра следует поддерживать как можно ближе к весу изначально чистого ковра.
5.2.3.4 Внедрение пыли или волокон в испытательный ковер
Пыль или волокна должны быть внедрены в испытательный ковер с помощью выполнения десяти двойных проходов по ковру, параллельно направлению ворса, ролика, соответствующего МЭК 62885-2:2016, 7.3.6.1 (ролик для внедрения пыли).
Скорость движения ролика в испытательной зоне должна быть равномерной: 0,5 м/с±0,02 м/с с прямым ходом в направлении ворса. Важно обеспечить, чтобы испытательная зона была полностью и равномерно прокатана. Затем ковер должен вылежаться в течение 10 минут, чтобы оправиться от прокатки.
5.3 Испытательный режим
5.3.1 Общие положения
Испытание по очистке при прямолинейном движении требует, чтобы робот перемещался вперед по прямой с номинальной скоростью, рассчитанной при нормальном режиме эксплуатации (см. 8.3). Существует и несколько других функций, необходимых для испытания по очистке при прямолинейном движении, которые должны быть реализованы в испытательном режиме.
Данный режим должен позволять роботу выполнять повторяющееся действие испытательного режима, при котором он должен переместиться вперед по прямой линии с фиксированной скоростью на заданное минимальное расстояние (см. 5.3.3). Работа в испытательном режиме должна удовлетворять общему требованию безопасности.
Данное действие испытательного режима затем может быть повторено несколько раз в зависимости от сути испытания (например, для испытания за несколько проходов).
При отсутствии испытательного режима робот должен быть испытан в режиме (например, в режиме дистанционного управления), который обеспечивает достаточно ровное движение (покрытие испытательной зоны должно быть как можно ближе к 100%) по прямой линии со скоростью, необходимой для данного испытания. Тот факт, что прямолинейное движение было реализовано в режиме, отличном от испытательного режима, должен быть зафиксирован в протоколе.
Если для обеспечения прямолинейного движения робота применен метод наведения, то необходимо проявить внимательность, чтобы минимизировать его влияние на мобильное поведение робота.
Испытательный режим должен быть реализован без увеличения стоимости робота.
Если достаточно прямолинейное движение не может быть реализовано, то данное испытание не может быть выполнено надлежащим образом и может быть пропущено.
5.3.2 Перевод робота в испытательный режим
Точный способ перевода робота в испытательный режим должен быть четко определен изготовителем и должен быть простым для реализации. Сразу после завершения операции по переводу в испытательный режим робот должен остаться в режиме ожидания.
Примечание - Примерами методов перевода робота в испытательный режим могут быть требование к пользователю нажать определенную комбинацию кнопок на роботе, когда робот находится во включенном состоянии, либо комбинацию кнопок следует удерживать в течение определенного периода времени, что не может иметь место при обычной эксплуатации робота. Единственным условием является документированность данного метода перевода.
Если робот находится в режиме ожидания, то пользователь должен иметь возможность инициировать одиночное выполнение действия испытательного режима (см. 5.3.3) на одной из двух скоростей, ![]() и
и ![]() , либо с помощью метода, доступного на роботе (например, нажатием кнопки), либо с помощью средств дистанционного управления. Скорости
, либо с помощью метода, доступного на роботе (например, нажатием кнопки), либо с помощью средств дистанционного управления. Скорости ![]() и
и ![]() должны быть рассчитаны в соответствии с методом, изложенным в 8.3.
должны быть рассчитаны в соответствии с методом, изложенным в 8.3.
После завершения выполнения действия в испытательном режиме робот должен оставаться в состоянии ожидания, готовым для выполнения другого действия в испытательном режиме, если потребуется.
Должна существовать возможность забрать робота и переместить его в другую позицию без выхода робота из состояния ожидания.
Предполагается, что пользователь должен иметь возможность выйти из данного режима либо выдав надлежащую команду, либо с помощью цикла выключения/включения питания.
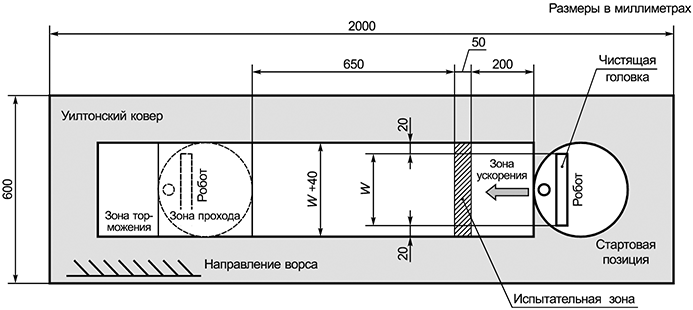
5.3.3 Действие в испытательном режиме
Действие в испытательном режиме предполагает запуск робота из неподвижного состояния и его перемещение по прямой линии до остановки.
Скорость робота при прямолинейном движении с очисткой, ![]() или
или ![]() , должна поддерживаться при перемещении робота по испытательной зоне и зоне прохода (равной продольной длине робота), показанных на рисунке 1. Зоны ускорения и торможения предназначены для разгона робота до скорости прямолинейного движения с очисткой и торможения до остановки.
, должна поддерживаться при перемещении робота по испытательной зоне и зоне прохода (равной продольной длине робота), показанных на рисунке 1. Зоны ускорения и торможения предназначены для разгона робота до скорости прямолинейного движения с очисткой и торможения до остановки.
|
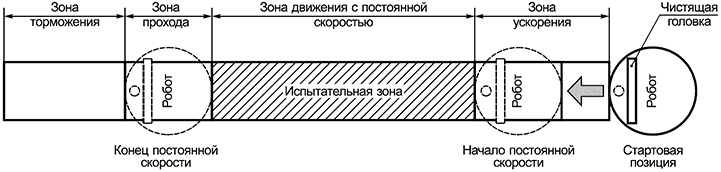
Рисунок 1 - Действие в испытательном режиме
Все усилия должны быть направлены на реализация прямолинейного маршрута. Однако понятно что робот может не реализовать движение точно по прямолинейному маршруту. Если в результате значительная часть испытательной зоны не будет охвачена, то данное испытание не может быть засчитано и данный факт должен быть отражен в протоколе.
Примечание - Упомянутые выше скорость и расстояние являются наблюдаемыми величинами, а не заданными.
При выполнении испытательного режима основные системы очистки робота должны быть активны в своем стандартном режиме эксплуатации. Все другие "улучшенные" системы очистки, которые могут мешать прямолинейному движению робота (например, датчик пыли), не должны быть активны.
Примечание - Могут быть предприняты необходимые шаги для проверки того, что испытательный режим эквивалентен стандартному режиму эксплуатации. Например, давление всасывания и акустический шум можно сравнить в испытательном режиме и в стандартном режиме эксплуатации.
5.3.4 Проверка скорости
Понятно, что реальное движение робота не будет в точности соответствовать описанному выше из-за разных внешних воздействующих факторов, таких как проскальзывание колес робота или разрешение системы наведения. Фактическая наблюдаемая скорость, с которой робот выполняет заданное действие, должна быть равна требуемой скорости ±10%.
Если скорость не соответствует приведенному выше условию, то данное несоответствие следует отразить в протоколе.
Скорость, с которой робот выполняет испытание, необходимо указать в протоколе наряду с результатами.
5.4 Удаление пыли с твердого пола
5.4.1 Испытательный стенд
Испытательный стенд идентичен описанному в 9.1.1.
5.4.2 Подготовка к испытанию
5.4.2.1 Предварительная подготовка испытательного пола
См. 5.2.2.
5.4.2.2 Предварительная очистка робота-уборщика
См. 5.2.1.
Сменные фильтры и компоненты для сбора пыли (например, пылевая прокладка) не следует заменять в течение выполнения одной попытки.
5.4.2.3 Скорость испытательных проходов на твердом полу
Проходы должны быть выполнены со скоростью ![]() , как определено в 8.3.
, как определено в 8.3.
См. также 5.3.4.
5.4.2.4 Нанесение испытательной пыли
Испытательная пыль типа 1 по МЭК 62885-2:2016, 7.2.2.1, должна быть нанесена со средней плотностью покрытия (50±0,1) г/м как можно более равномерно по всей испытательной зоне. Количество испытательной пыли, которая должна быть использована, рассчитывают по формуле (W-0,02) м
0,7 м
(50±0,1) г/м
, где W - ширина чистящей головки робота в метрах, а длина испытательной зоны равна 0,7 м.
Примечание 1 - Для равномерного нанесения испытательной пыли может быть использован ручной распределитель пыли, показанный на рисунке 2.
Примечание 2 - Для того, чтобы обеспечить нанесение испытательной пыли только в пределах испытательной зоны, может быть использована трафаретная рамка с размером испытательной зоны. При использовании такой рамки испытатель должен убедиться, что пыль, приставшая к трафаретной рамке, упадет на испытательную зону.
|
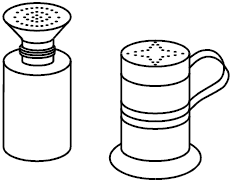
Рисунок 2 - Устройства для нанесения пыли
5.4.3 Метод испытания
После того, как процесс подготовки будет завершен в соответствии с 5.4.2, пылесборник должен быть взвешен, как указано в 4.9 ().
Робот-уборщик должен быть включен и переведен в испытательный режим с помощью способа, предусмотренного изготовителем (см. 5.3.2).
Робот-уборщик должен быть установлен на исходную позицию в соответствии с рисунком 18, при этом центр чистящей головки должен быть совмещен с осевой линией испытательной зоны.
Это важно для обеспечения надлежащего согласованного совмещения робота с испытательной зоной на испытательном стенде. Во время процесса установки может быть использовано центрирующее приспособление, например лазерный указатель, для подтверждения правильного расположения. Робот-уборщик должен выполнить один проход.
После того, как движение робота-уборщика остановится, пылесборник должен быть аккуратно извлечен и взвешен, как указано в 4.9. Вес пыли () должен быть определен как разность между измеренным значением и
.
Следующий проход должен быть выполнен без очистки робота и пылесборника. После каждого прохода пылесборник должен быть аккуратно извлечен и повторно взвешен, как указано в 4.9.
Одна попытка очистки состоит из N проходов (прямолинейных движений вперед), где число N должно быть выбрано лицом, проводящим испытание. Пыль на испытательном стенде (даже за пределами испытательной зоны) не должна удаляться до окончания всей попытки. Если в каком-либо из проходов испытательная зона не будет охвачена полностью, то вся попытка должна быть отменена и повторена заново.
Попытка очистки (с N проходами) должна быть повторена еще два раза. Перед каждой попыткой робот и пылесборник должны быть подготовлены в соответствии с 5.2.1.
Только для испытаний по удалению пыли, если разброс значений суммарного коэффициента способности удаления пыли (определен в 5.4.4) в трех попытках больше 10%, то должны быть выполнены еще две попытки.
5.4.4 Определение способности удаления пыли
Коэффициент удаления пыли может быть вычислен по формуле
![]() ,
,
где - суммарный коэффициент удаления пыли после i-го прохода по испытательной зоне, рассчитанный по k-й попытке, %;
- суммарный вес пыли, первоначально нанесенной в испытательную зону для k-й попытки, г;
- измеренный суммарный вес пыли, собранной после i-го прохода для k-й попытки, г.
После завершения n попыток окончательный коэффициент удаления пыли рассчитывают по формуле
![]() ,
,
где - окончательный суммарный коэффициент удаления пыли за i-и проход, где i=1, 2, 3, ..., N;
n - число попыток.
Примечание - Существуют два способа подсчета собранной пыли для метода испытания при движении по прямой: абсолютный и относительный. При абсолютном способе подсчитывают собранную пыль по итогам выбранного числа проходов, выполненных роботом, независимо от числа проходов, которое навигационная система робота предписывает выполнить во время реальной работы. Например, суммарные измерения собранной пыли могут быть сделаны за 1, 3, 5 или 10 проходов, даже если навигационная система робота делает только два прохода во время реальной работы. Это позволяет сравнивать характеристики вакуумной системы независимо от навигационной системы и облегчает сравнение с пылесосами с ручным управлением, если требуется. При относительном способе собранную пыль регистрируют после каждого прохода, вплоть до общего числа проходов, зафиксированных для данного робота по результатам испытания автономной навигации/покрытия (см. раздел 7). Это обеспечивает то, что зафиксированная способность удаления пыли относительна по отношению к навигационной стратегии робота, и поэтому представляет реальную производительность при сравнении разных роботов. Пределом для числа дополнительных суммируемых попыток, включаемых в измерение, является попытка, при которой увеличение собранной пыли между попытками n и n-1 не превышает 1%.
5.5 Удаление пыли с ковра
5.5.1 Испытательный стенд
Испытательный стенд определен в 9.1.2.
5.5.2 Подготовка к испытанию
5.5.2.1 Предварительная очистка испытательного ковра
См. 5.2.3.
5.5.2.2 Подготовка испытательного ковра
См. 5.2.3.2.
5.5.2.3 Проверка и предварительная подготовка испытательного ковра
См. 5.2.3.3.
5.5.2.4 Предварительная очистка робота-уборщика
См. 5.2.1.
5.5.2.5 Скорость выполнения испытательного прохода на ковре
Испытательные проходы следует выполнять со скоростью ![]() , как определено в 8.3.
, как определено в 8.3.
См. 5.3.4.
5.5.2.6 Нанесение испытательной пыли
Испытательная пыль типа 2 по МЭК 62885-2:2016, 7.2.2.2, должна быть нанесена со средней плотностью покрытия (125±0,1) г/м как можно более равномерно по всей испытательной зоне.
Количество испытательной пыли, которая должна быть использована, рассчитывают по формуле (W-0,02) м0,7 м
125 г/м
, где W - ширина чистящей головки робота в метрах, а длина испытательной зоны равна 0,7 м. Для равномерного нанесения испытательной пыли в испытательной зоне следует использовать распределитель пыли, описанный в МЭК 62885-2:2016, 7.3.5. Настройку устройства проверяют визуальным осмотром испытательной пыли на ковре.
5.5.2.7 Внедрение испытательной пыли в испытательный ковер
См. 5.2.3.4.
5.5.3 Метод испытания
См. 5.4.3 за исключением ссылки на рисунок 19 вместо рисунка 18.
5.5.4 Определение способности удаления пыли
См. 5.4.4.
5.6 Удаление мусора среднего размера с твердого пола
5.6.1 Испытательный стенд
Испытательный стенд определен в 9.1.1.
5.6.2 Подготовка к испытанию
5.6.2.1 Предварительная подготовка испытательного пола
Испытательный пол должен быть визуально чистым перед каждой попыткой.
5.6.2.2 Предварительная очистка робота-уборщика
См. 5.2.1.
Исключение: многоразовые пылесборники должны быть визуально чистыми между последовательными попытками. Сменные фильтры и компоненты для сбора пыли не следует заменять между последовательными попытками.
5.6.2.3 Скорость выполнения испытательного прохода на твердом полу
См. 5.4.2.3.
5.6.2.4 Нанесение мусора
Следует использовать смесь в куче винтов с плотностью 15 г/м±0,1 г/м
и гаек с плотностью 15 г/м
±0,1 г/м
(детали представлены в таблице 2).
Данная смесь должна быть равномерно распределена по испытательной зоне с произвольной ориентацией и положением.
Примечание - Для того, чтобы обеспечить нанесение испытательного мусора только в пределах испытательной зоны, может быть использована трафаретная рамка с размером испытательной зоны или маркер.
Таблица 2 - Мусор среднего размера
Винт | Гайка |
Тип: М3х6 установочный винт со шлицем и плоским концом | Тип: М3 шестигранная стандартная гайка (стиль 1) |
Стандарт: ИСО 4766 | Стандарт: ИСО 4032 |
Материал: РА 6.6 | Материал: РА 6.6 |
Цвет: натуральный | Цвет: натуральный |
5.6.3 Метод испытания
См. 5.4.3.
5.6.4 Определение способности удаления мусора среднего размера
См. 5.4.4.
5.7 Удаление мусора среднего размера с ковра
5.7.1 Испытательный стенд
См. 9.1.2.
5.7.2 Подготовка к испытанию
5.7.2.1 Предварительная подготовка испытательного ковра
Ковер должен быть визуально чистым. Если ковер ранее использовался для испытания по удалению пыли с ковра (см. 5.5), то он должен быть очищен в соответствии с 5.2.3.2 и 5.2.3.3 до начала испытаний по удалению мусора среднего размера.
5.7.2.2 Предварительная очистка робота-уборщика
См. 5.2.1.
Исключение: многоразовые пылесборники должны быть визуально чистыми между последовательными попытками. Сменные фильтры и компоненты для сбора пыли не следует заменять между последовательными попытками.
5.7.2.3 Скорость выполнения испытательного прохода на ковре
См. 5.5.2.5.
5.7.2.4 Нанесение мусора
См. 5.6.2.4.
5.7.3 Метод испытания
См. 5.4.3 за исключением ссылки на рисунок 19 вместо рисунка 18.
5.7.4 Определение способности удаления мусора среднего размера
См. 5.4.4.
5.8 Удаление мусора крупного размера с твердого пола
5.8.1 Испытательный стенд
См. 9.1.1.
5.8.2 Подготовка к испытанию
5.8.2.1 Предварительная подготовка испытательного пола
Испытательный пол должен быть визуально чистым перед каждой попыткой.
5.8.2.2 Предварительная очистка робота-уборщика
См. 5.2.1.
Исключение: многоразовые пылесборники должны быть визуально чистыми между последовательными попытками. Сменные фильтры и компоненты для сбора пыли (например, пылевая прокладка) не следует заменять между последовательными попытками.
5.8.2.3 Скорость выполнения испытательного прохода на твердом полу
См. 5.4.2.3.
5.8.2.4 Нанесение мусора
Крупный мусор, представленный в таблице 3, следует нанести с помощью трафарета, как показано на рисунке 3.
Таблица 3 - Крупный мусор
Мусор | Спецификация |
Колпачковая гайка | Тип: М4 шестигранная колпачковая гайка, высокий тип |
Стандарт: DIN 1587 | |
Материал: РА 6.6 | |
Цвет: натуральный |
|
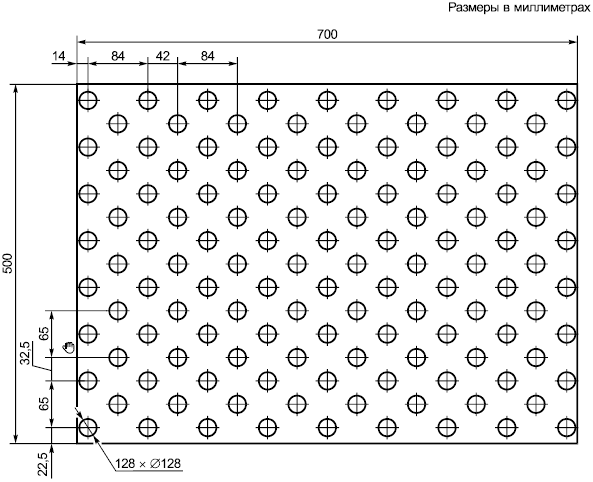
Рисунок 3 - Трафарет для нанесения крупного мусора
Трафарет следует разместить так, чтобы максимальное число рядов было расположено в пределах (W-20) мм, где W - ширина чистящей головки робота в мм, и маршрута движения робота (рисунок 4), и чтобы первый ряд был одним из длинных рядов (состоящих из 9 отверстий).
|
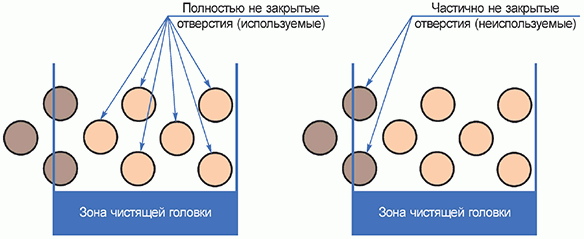
Рисунок 4 - Расположение отверстий трафарета для крупного мусора
Используемые отверстия следует разместить посередине зоны чистящей головки.
Один элемент крупного мусора должен быть произвольно ориентирован в каждом отверстии.
5.8.3 Метод испытания
См. 5.4.3.
Исключение: попытку следует считать завершенной после первого прохода. Вместо взвешивания пылесборника подсчитывают число элементов крупного мусора в пылесборнике.
5.8.4 Определение способности удаления мусора крупного размера
Коэффициент захватывания следует рассчитывать следующим образом:
![]() ,
,
где - коэффициент захватывания;
- число элементов крупного мусора, собранных в контейнер;
- число элементов крупного мусора, нанесенных в испытательную зону.
Примечание - В реальной работе роботы-уборщики используют разные системы обнаружения объектов, разные принципы навигации и могут использовать разные стратегии удаления мусора с пола, поэтому важно принимать во внимание также данные аспекты при вынесении окончательного решения по чистящей способности робота.
5.9 Удаление мусора крупного размера с ковра
5.9.1 Испытательный стенд
См. 9.1.2.
5.9.2 Подготовка к испытанию
5.9.2.1 Предварительная очистка испытательного ковра
Испытательный ковер должен быть визуально чистым.
5.9.2.2 Предварительная очистка робота-уборщика
См. 9.1.2.
Исключение: многоразовые пылесборники должны быть визуально чистыми между последовательными попытками. Сменные фильтры и компоненты для сбора пыли не следует заменять между последовательными попытками.
5.9.2.3 Скорость выполнения испытательного прохода на ковре
См. 5.5.2.5.
5.9.2.4 Нанесение мусора
См. 5.8.2.4.
5.9.3 Метод испытания
См. 5.4.3.
Исключение: попытку следует считать завершенной после первого прохода. Вместо взвешивания пылесборника подсчитывают число элементов крупного мусора в пылесборнике.
5.9.4 Определение способности удаления мусора крупного размера
См. 5.8.4.
5.10 Удаление волокон с ковра
5.10.1 Испытательный стенд
Испытательный стенд, определенный в 9.1.2, модифицирован, чтобы получить испытательную зону меньшего размера, как показано на рисунке 5.
|
W - ширина чистящей головки робота
Рисунок 5 - Конфигурация испытательного стенда для удаления волокон с ковра при прямолинейном движении
5.10.2 Подготовка к испытанию
5.10.2.1 Предварительная очистка испытательного ковра
См. 5.7.2.1.
5.10.2.2 Подготовка испытательного ковра
См. 5.2.3.2.
5.10.2.3 Предварительная очистка робота-уборщика
См. 5.2.1. Робот и особенно чистящая головка и пылесборник должны быть визуально чистыми от оставшихся волокон.
5.10.2.4 Скорость выполнения испытательного прохода на ковре
См. 5.5.2.5.
5.10.2.5 Нанесение волокон
Трафарет, показанный на рисунке 6, должен быть отрегулирован в зависимости от ширины чистящей головки робота. Размер испытательной зоны должен быть равен 0,05 м(W+0,04) м, где W - ширина чистящей головки робота, определенная в 3.4.
|
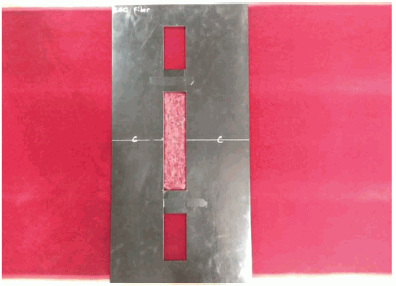
Рисунок 6 - Пример трафарета для нанесения волокон
Волокно, соответствующее МЭК 62885-2:2016, 7.2.3, должно быть выщипано вручную и размещено в испытательной зоне как можно более равномерно. Для обеспечения согласованности испытания волокно не должно быть с силой вдавлено в ковер руками.
Испытательное волокно должно быть размещено в испытательной зоне со средней плотностью (4±0,2) г/м как можно более равномерно. Необходимое количество испытательного волокна вычисляют по формуле: 0,05 м
(W+0,04) м
4 г/м
, где W - ширина чистящей головки робота в метрах, а длина испытательной зоны равна 0,05 м.
Примечание 1 - Например, если ширина чистящей головки робота равна 0,16 м, размер испытательной зоны 0,05 м0,2 м, то 40 мг волокна будет распределено в испытательной зоне.
Примечание 2 - Плотность нанесения волокна была определена с помощью повторяемости и дифференцируемости испытаний разных изделий.
5.10.2.6 Внедрение волокна в испытательный ковер
См. 5.2.3.4.
Примечание 1 - Процесс внедрения может вызвать перемещение волокон. После внедрения волокон испытательная зона обычно немного сдвигается в направлении ворса ковра.
Примечание 2 - Используемый ролик такой же, как при внедрении пыли в соответствии с настоящим стандартом. Ролик для испытания по сбору волокон, описанный в МЭК 62885-2, не соответствует требованиям.
5.10.3 Метод испытания
См. 5.4.3.
Исключение: вместо взвешивания пылесборника следует выполнить визуальное сравнение оцениваемой зоны. Фотографии оцениваемой зоны для сравнения следует сделать до первого прохода и после каждого прохода до завершения N проходов. Необходимо проявить аккуратность, чтобы получить сравнимые фотографии.
Примечание - Для сравниваемых фотографий важное значение имеют условия освещенности и место, с которого они сделаны.
5.10.4 Определение способности удаления волокон
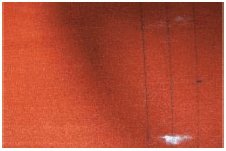
Характеристику по сбору волокон надлежит оценивать на основе визуального осмотра. Для ее оценки следует рассматривать только зону, называемую "оцениваемой зоной", шириной (W - 0,02) м, где W - ширина чистящей головки робота, на расстоянии 0,7 м вдоль направления перемещения робота, поэтому остающиеся полоски с волокнами по краям чистящей головки при оценке не учитывают.
Введен пятиуровневый рейтинг, показанный в таблице 4. Каждый уровень проиллюстрирован фотографиями оцениваемых зон (см. рисунок 7).
|
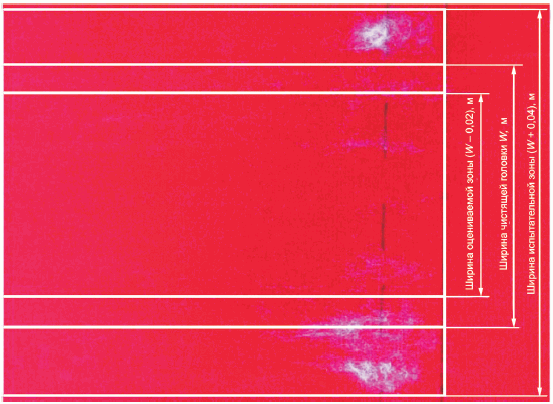
Рисунок 7 - Фотография, иллюстрирующая оцениваемую зону
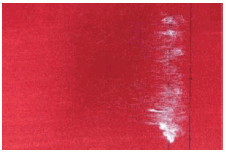
Таблица 4 - Система рейтингов с иллюстрирующими фотографиями
Рейтинг | Иллюстрирующие фотографии | Описание | |
1 - Плохо |
|
| Почти нет волокон на роботе или щетке и почти нет подобранных волокон в испытательной зоне и/или очевидное размазывание волокон по оцениваемой зоне. |
2 - Прилично |
|
| Некоторые волокна присутствуют на роботе или щетке и/или видимый подбор волокон в испытательной зоне, и/или очевидное размазывание волокон по оцениваемой зоне. |
3 - Хорошо |
|
| Хороший подбор волокон в испытательной зоне и возможно некоторое размазывание волокон по оцениваемой зоне. |
4 - Очень хорошо |
|
| Почти чистая испытательная зона и почти нет размазывания волокон по оцениваемой зоне. |
5 - Отлично |
|
| Чистая испытательная зона и нет размазывания волокон по оцениваемой зоне. |
Более подробные изображения приведены в приложении С. | |||
6 Мобильность
6.1 Общие положения
Целью данных испытаний является количественная оценка способности робота-уборщика перемещаться по стандартизованной поверхности. Определенные в данном разделе испытания мобильности представлены в таблице 5.
Таблица 5 - Перечень представленных испытаний мобильности
Пункт | Испытание |
6.4.2 | Минимальная проходимая ширина прохода |
6.4.3 | Минимальная проходимая высота проема |
6.4.4 | Максимальная проходимая высота ступени |
6.4.5 | Максимальная проходимая высота порога |
6.2 Испытательный стенд
Испытательный стенд для проведения данных испытаний определен в 9.2.1. Дополнительное испытательное оборудование описано отдельно для каждого испытания в 9.2.2-9.2.5.
6.3 Подготовка к испытанию
6.3.1 Условия проведения испытания
Температура и влажность окружающей среды должны быть зарегистрированы в протоколе.
6.3.2 Предварительная подготовка пола для испытаний
Пол для испытаний должен быть очищен так, чтобы на нем не оставалось пыли перед каждым последующим испытанием.
6.3.3 Предварительная подготовка робота-уборщика
Аккумуляторная батарея робота-уборщика должна быть полностью перезаряжена перед каждым запуском в соответствии с инструкциями изготовителя.
6.4 Метод испытания
6.4.1 Общие положения
Во всех испытаниях мобильности одна попытка состоит из запусков с каждой из двух исходных позиций, показанных на рисунке 8.
|
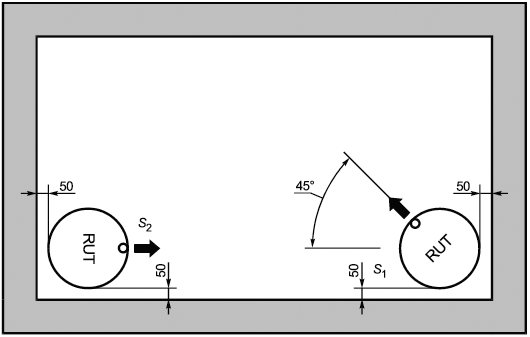
Стрелка показывает направление движения робота-уборщика; RUT- испытываемый робот
Рисунок 8 - Исходные позиции и ориентации
Робот-уборщик должен начать работать автономно в соответствии с инструкциями изготовителя.
Если робот-уборщик прекращает работу в течение 5 минут или если он достигает противоположной стороны испытательного стенда, то запуск считают завершенным. Перемещение робота-уборщика к противоположной стороне испытательного стенда означает, что корпус робота-уборщика движется из зоны А в зону В или из В в А (в зависимости от исходной позиции), как показано на рисунках 9-14.
Если робот-уборщик прекращает работу из-за контакта с испытательным оборудованием и застревает, то запуск на этом завершается.
Если робот-уборщик все еще работает спустя 5 минут, то он должен быть остановлен и запуск завершен.
Перед следующим запуском испытательный стенд и робот-уборщик должны быть подготовлены для следующего запуска в соответствии с 6.3.
При испытании мобильности попытка (из двух запусков) должна быть повторена еще два раза. Полный набор испытаний для одного образца робота-уборщика состоит из трех попыток, что в общей сложности составляет шесть запусков.
Конкретное испытательное оборудование для разных испытаний мобильности описано в 6.4.2-6.4.5.
Примечание - Допускается регистрировать запуски (например, с помощью камеры или СОПР) и оценивать их после завершения всех запусков.
6.4.2 Минимальная проходимая ширина прохода
Размер прохода устанавливают с помощью подвижной части 2 стены или аналогичного оборудования. Установленный размер прохода измеряют между краем подвижной части 2 и близлежащей стеной, как показано на рисунке 9. Минимальное приращение ширины прохода равно 2 мм, и оно должно быть отрегулировано до ближайших 2 мм. Когда нужный размер прохода установлен, часть 2 стены должна быть закреплена на части 1 (например, с помощью фиксирующей задвижки или стопорного болта). Обе части стены должны быть надежно закреплены, а испытатель должен убедиться в том, что они не сдвигаются и не изгибаются, даже если робот-уборщик натолкнется на стену.
|
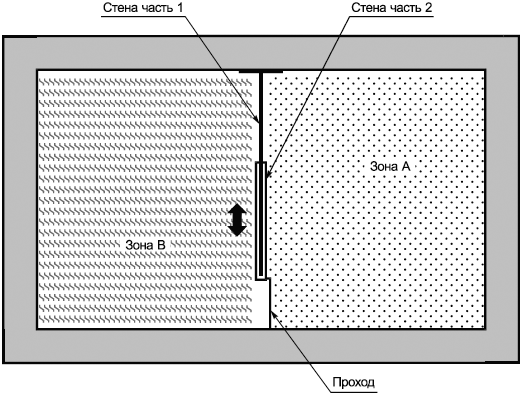
Рисунок 9 - Испытание на минимальную проходимую ширину прохода
Примечание - Пример алгоритма, который может быть использован для определения минимальной ширины прохода, показан на рисунке 10. Начальным параметром является ширина робота-уборщика, округленная до следующего значения, кратного 2 мм. Например, если ширина робота-уборщика равна 381 мм, то начальный параметр должен быть округлен до следующего значения приращения, т.е.
382.
|
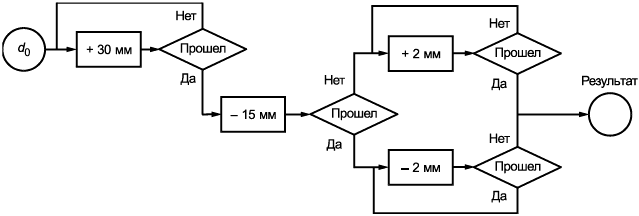
Рисунок 10 - Предложенный алгоритм определения минимальной проходимой ширины прохода
6.4.3 Минимальная проходимая высота проема
Испытательный стенд и испытательное оборудование для данного испытания представлены в 9.2.3 и на рисунке 11. Высота проема должна регулироваться с помощью распорок или аналогичного оборудования. Одну распорку или комплект распорок устанавливают на каждом углу перекрытия. Приращение высоты проема для данного испытания равно 2 мм.
|
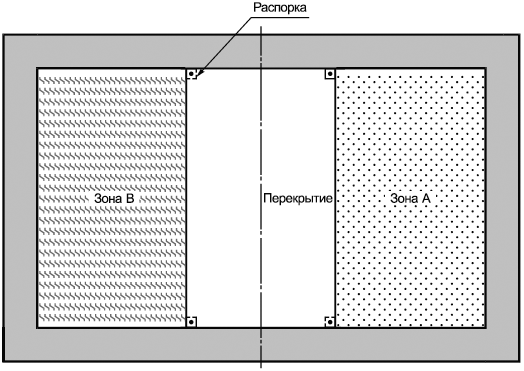
Рисунок 11 - Испытание на минимальную проходимую высоту проема
6.4.4 Максимальная проходимая высота ступени
Испытательный стенд и испытательное оборудование для данного испытания представлены в 9.2.4 и на рисунке 12. Высота ступени должна регулироваться с помощью дополнительных панелей или аналогичного оборудования. Верхняя поверхность (панель из необработанной многослойной дубовой фанеры или эквивалентного материала) в комбинации с дополнительными панелями может быть использована для обеспечения разной высоты ступени. Для регулировки высоты ступени можно использовать панели разной толщины. Приращение высоты ступени для испытания равно 1 мм.
|
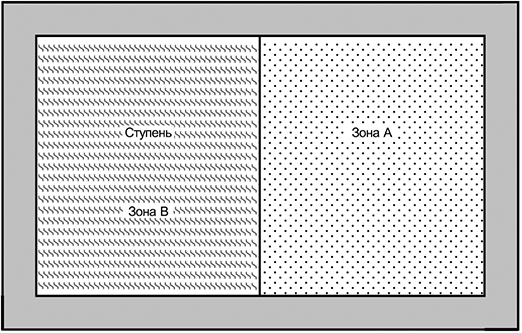
Рисунок 12 - Испытание на максимальную проходимую высоту ступени
Примечание 1 - Пример алгоритма, который может быть использован для определения максимальной высоты ступени, показан на рисунке 13. Рекомендуемым значением начального параметра является 17 мм.
Примечание 2 - Роботы-уборщики могут обладать технологиями, не позволяющими им забираться на определенную высоту. Если это указано в инструкциях изготовителя, то допускается пропускать данные значения высоты, но указать это в протоколе испытаний. При этом будет необходимо отклониться от следования алгоритму, представленному на рисунке 13.
|
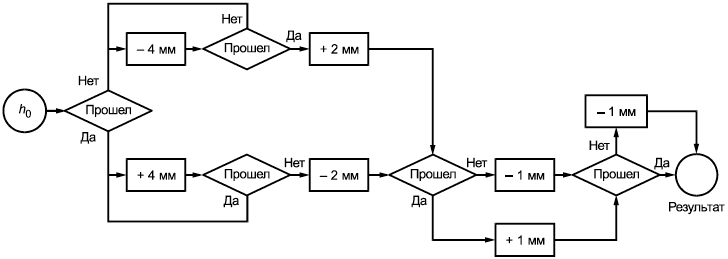
Рисунок 13 - Алгоритм определения максимальной проходимой высоты ступени
6.4.5 Максимальная проходимая высота порога
Испытательный стенд и испытательное оборудование для данного испытания представлены в 9.2.5 и на рисунке 14. Перед каждым испытанием нужный тип порога (см. 9.2.5) с заданной высотой должен быть установлен на испытательном стенде. Порог должен бать закреплен так, чтобы он не мог быть сдвинут в любом направлении (например, качением или изгибом). Приращение высоты порога при данном испытании равно 1 мм.
|
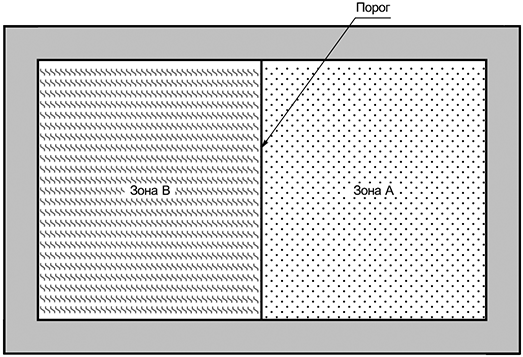
Рисунок 14 - Испытание на максимальную проходимую высоту порога
Примечание 1 - Пример алгоритма, который может быть использован для определения максимальной проходимой высоты порога, показан на рисунке 13. Рекомендуемым значением начального параметра является 17 мм.
Примечание 2 - Роботы-уборщики могут обладать технологиями, не позволяющими им забираться на определенную высоту. Если это указано в инструкциях изготовителя, то допускается пропускать данные значения высоты, но указать это в протоколе испытаний. При этом будет необходимо отклониться от следования алгоритму, представленному на рисунке 13.
6.5 Определение результатов испытания мобильности
Окончательным значением, вносимым в протокол для каждого испытания мобильности, должен быть результат, указанный в таблице 6. Данное значение должно быть определено на основании всех результатов проведенных испытаний трех отдельных образцов.
Таблица 6 - Вносимые в протокол результаты для каждого из испытаний мобильности
Испытание | Пункт | Результат |
Минимальная проходимая ширина прохода | 6.4.2 | Минимальная ширина, которая была успешно пройдена |
Минимальная проходимая высота проема | 6.4.3 | Минимальная высота, которая была успешно пройдена |
Максимальная проходимая высота ступени | 6.4.4 | Максимальная высота, которая была успешно пройдена |
Максимальная проходимая высота порога | 6.4.5 | Максимальная высота прямоугольного порога, которая была успешно пройдена, и |
Для того, чтобы один образец прошел установленные параметры оборудования (высота/ширина) при испытании мобильности, должно быть успешно выполнены шесть запусков (по три из каждой исходной позиции). Запуск считают успешным, если робот-уборщик переместился из зоны А в зону В или из В в А (в зависимости от исходной позиции), как показано на рисунках 9-14.
Если робот-уборщик не смог преодолеть препятствие при заданных параметрах оборудования, то он должен быть заново перезапущен из исходной позиции, а данный результат должен быть аннулирован. Однако разрешен только один перезапуск в процессе испытаний при заданных параметрах оборудования. Если робот-уборщик не выполнил задание при тех же параметрах оборудования во второй раз, то это означает, что он не прошел испытание.
Если робот-уборщик не смог выполнить задание из-за того, что он застрял (робот-уборщик прекратил работу из-за контакта с испытательным оборудованием), то испытание при данных параметрах оборудования считают неудачным и испытание должно быть прекращено. Параметры оборудования, при которых робот-уборщик застрял, должны быть зафиксированы и внесены в протокол.
7 Испытание автономной навигации/зоны покрытия
7.1 Общие положения
Целью испытания автономной навигации/зоны покрытия является определение способности роботов-уборщиков покрывать доступное пространство в стандартизованной конфигурации помещения. Мерой рабочей характеристики для данного испытания является суммарный процент площади пола, пройденный в течение определенного периода времени. Многократные проходы робота по одним и тем же участкам пола также учитывают в данном испытании.
Примечание - Для того, чтобы снизить трудоемкость проведения испытаний, данное испытание может быть выполнено одновременно с испытанием потребления энергии (см. 8.1).
7.2 Подготовка к испытанию
7.2.1 Испытательный стенд
Испытательный стенд определен в 9.3.
7.2.2 Условия проведения испытания
Для данного испытания должны быть зафиксированы температура и влажность окружающей среды.
Примечание - Условия освещенности определены в 9.3.3.
7.2.2.1 Предварительная подготовка пола для испытания
Пол для испытания должен быть визуально чистым перед каждым запуском.
7.2.2.2 Предварительная очистка робота-уборщика
См. 5.2.1.
Исключение: многоразовые пылесборники должны быть визуально чистыми. Подраздел 4.4 не применим.
7.2.2.3 Система отслеживания пространственного расположения (СОПР)
Во время испытания испытательный стенд должен контролироваться с помощью системы отслеживания пространственного расположения (СОПР). Надлежащая СОПР должна быть установлена, а функциональность СОПР должна быть проверена на соответствие характеристикам, указанным в 4.10.
7.3 Метод испытания
Одна попытка состоит из одного запуска из каждой из трех исходных позиций. Следует использовать исходные позиции и ориентацию, показанные на рисунке 15.
|
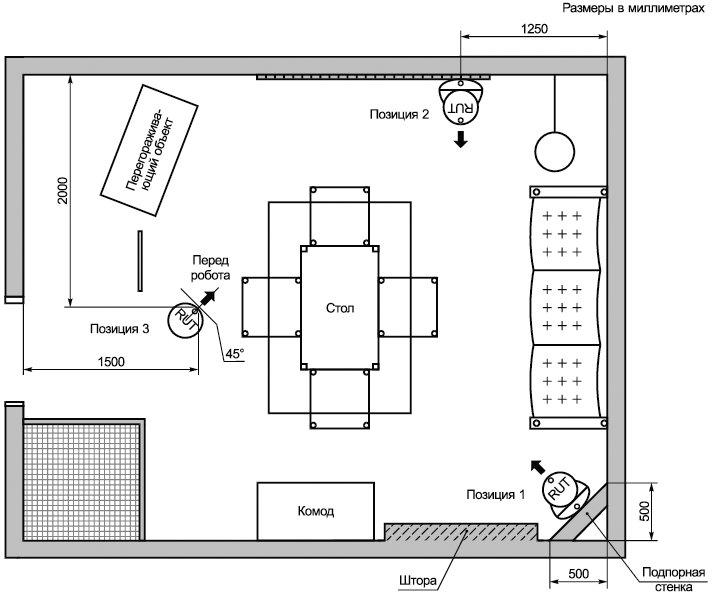
RUT- испытываемый робот
Рисунок 15 - Исходные позиции для испытания навигации
Перед каждой попыткой робот и испытательный стенд должны быть подготовлены в соответствии с 7.2.2.1 и 7.2.2.2.
Перед каждым запуском аккумуляторная батарея робота должна быть полностью заряжена.
При каждом запуске робот должен быть приведен в действие согласно инструкциям изготовителя.
Использование док-станции допускается для двух исходных позиций 1 и 2, если это рекомендовано изготовителем. Тот факт, что роботу для работы необходима док-станция, должен быть отражен в отчете. Если док-станция использовалась в начале испытания, то она должна оставаться на том же месте на протяжении всего запуска. При этом площадь станции должна быть вычтена из общей доступной площади.
На исходной позиции 3 робот-уборщик должен начать работу без док-станции. Если робот не может начать работу без док-станции, то запуски из позиции 3 должны быть пропущены, и этот факт должен быть указан в протоколе.
Важно обеспечить надлежащее согласованное выравнивание робота относительно стены на испытательном стенде.
Примечание - Во время процесса настройки может быть использовано установочное приспособление, например лазерный указатель, для проверки правильности выравнивания.
Позади позиции 1 должна быть установлена подпорная стенка, как показано на рисунке 15. Подпорная стенка должна быть изготовлена из необработанного соснового щита или аналогичного материала высотой 300 мм от поверхности пола. Пространство за стенкой, включая площадь основания самой стенки, должно быть определено как недоступное.
Кабель питания, идущий от основания станции, должен быть закреплен на стене.
Испытание следует продолжать до завершения операции очистки. Завершение процесса очистки должно быть определено в соответствии с руководством пользователя.
Примечание - Завершение операции может быть определено на основе одного или нескольких из следующих событий для примера:
- получено сообщение от робота о завершении цикла очистки (звуковое, световое или текстовое, как указано в руководстве пользователя);
- прекращение движения по полу дольше чем на 3 минуты (но не на базовой станции, потому что робот может продолжить работу после подзарядки).
Если робот все еще находится в процессе уборки спустя 2 часа после запуска, то рекомендуется его остановить и прекратить испытание.
Если необходимо продолжить данный запуск после 2 часов работы по какой-либо причине, то право принятия решения о продолжении испытания предоставляется лицу, проводящему испытание. Причина продолжения испытания после 2 часов работы должна быть указана в протоколе.
Возвращение на станцию для подзарядки во время запуска допускается, но время, используемое для подзарядки, должно быть включено в общую продолжительность запуска.
Во время запуска обработанная чистящей головкой площадь, в процентах, и число проходов должны отслеживаться и регистрироваться с помощью СОПР.
Примечание - Желательно, чтобы до начала испытания были подготовлены три аккумуляторные батареи для того, чтобы избежать прерывания испытания для подзарядки аккумуляторной батареи.
Попытка при испытании навигации (с тремя запусками) должна быть повторена еще два раза. Полное испытание состоит из трех попыток, что в общей сложности включает девять запусков.
Если робот прекращает работу по любой другой причине, кроме нормального завершения запуска, то он должен быть запущен заново из исходной позиции, и такой неудачный результат должен быть аннулирован. Однако максимум один перезапуск из исходной позиции допускается на протяжении всего испытания. Дальнейшие неудачные результаты должны быть включены в результаты испытания без перезапуска. Число неудач должно быть указано в протоколе.
7.4 Измерение характеристик
С помощью данного испытания должно быть измерено покрытие площади чистящей головкой. Покрытие чистящей головкой определяют как область, покрытую чистящей головкой робота в течение определенного периода времени. Процент покрытия чистящей головкой за определенное время рассчитывают с использованием следующего уравнения:
![]() ,
,
где i - номер исходной позиции 1, 2 и 3;
j - номер попытки 1, 2 и 3;
![]() - процент покрытия чистящей головкой за время t для запуска из i-й позиции в j-й попытке (i=1, 2 и 3, y=1, 2 и 3), %;
- процент покрытия чистящей головкой за время t для запуска из i-й позиции в j-й попытке (i=1, 2 и 3, y=1, 2 и 3), %;
![]() - площадь, по которой чистящая головка прошла по крайней мере один раз за время t для запуска из i-й позиции в j-й попытке, м
- площадь, по которой чистящая головка прошла по крайней мере один раз за время t для запуска из i-й позиции в j-й попытке, м;
t - длительность запуска, мин;
A - общая доступная площадь (м), которую вычисляют на основании общей площади пола за вычетом площади, занимаемой ножками, обогревающим плинтусом, комодом, цилиндрическим стержнем, перегораживающим объектом, основанием лампы, подпорной стенкой и пространством за ней. Зона под диваном считается доступной зоной. Если док-станция осталась на испытательном стенде, то ее площадь должна быть вычтена из общей доступной площади.
Параметр А должен быть рассчитан точно на основании фактической конфигурации испытательного стенда, построенного в испытательной лаборатории. Если конфигурация изменилась (например, из-за допусков), то параметр А должен быть соответственно пересчитан.
Примечание 1 - С помощью СОПР процент покрытия для каждого прохода за определенное время можно вычислить автоматически с помощью простой программы обработки изображения.
Примечание 2 - Подробное описание и применение СОПР приведены в приложении А.
Процент покрытия за несколько проходов за определенное время рассчитывают с помощью следующих уравнений:
![]() ;
;
![]() ,
,
где i - номер исходной позиции 1, 2 и 3;
j - номер попытки 1, 2 и 3;
![]() - процент площади, пройденной чистящей головкой как минимум два раза за время t для запуска из i-й позиции в j-й попытке, %;
- процент площади, пройденной чистящей головкой как минимум два раза за время t для запуска из i-й позиции в j-й попытке, %;
![]() - процент площади, пройденной чистящей головкой как минимум три раза за время t для запуска из i-й позиции в j-й попытке, %;
- процент площади, пройденной чистящей головкой как минимум три раза за время t для запуска из i-й позиции в j-й попытке, %;
![]() - площадь, по которой чистящая головка прошла по крайней мере два раза за время t для запуска из i-й позиции в j-й попытке, м
- площадь, по которой чистящая головка прошла по крайней мере два раза за время t для запуска из i-й позиции в j-й попытке, м;
![]() - площадь, по которой чистящая головка прошла по крайней мере три раза за время t для запуска из i-й позиции в j-й попытке, м
- площадь, по которой чистящая головка прошла по крайней мере три раза за время t для запуска из i-й позиции в j-й попытке, м.
Примечание 3 - Процент покрытия за число проходов более трех может быть рассчитан аналогично.
Рекомендуется, чтобы процент покрытия в зависимости от времени был представлен на графике с огибающей 25-го процентиля и 75-го процентиля. Процент покрытия для одного прохода, двух проходов и трех проходов должен быть представлен на одном графике с огибающей 25-го процентиля и 75-го процентиля. Разрешение графика по времени не должно превышать интервала в 2 минуты, а процентное разрешение не должно превышать 1%.
Например, точка 75-го процентиля для ![]() в момент времени t представляет седьмое наибольшее значение среди девяти значений
в момент времени t представляет седьмое наибольшее значение среди девяти значений ![]() . Огибающая 75-го процентиля - это группа точек 75-х процентилей, соединенных линией. Точка 25-го процентиля для
. Огибающая 75-го процентиля - это группа точек 75-х процентилей, соединенных линией. Точка 25-го процентиля для ![]() в момент времени t представляет второе наибольшее значение среди девяти значений
в момент времени t представляет второе наибольшее значение среди девяти значений ![]() . Огибающая 25-го процентиля - это группа точек 25-х процентилей, соединенных линией. Средняя точка
. Огибающая 25-го процентиля - это группа точек 25-х процентилей, соединенных линией. Средняя точка ![]() в момент времени t является средним пятого наибольшего значения среди девяти значений
в момент времени t является средним пятого наибольшего значения среди девяти значений ![]() . Срединная огибающая - это группа средних точек, соединенных линией.
. Срединная огибающая - это группа средних точек, соединенных линией.
Для запуска, завершенного ранее самого длинного запуска, последнее значение процента покрытия должно быть сохранено для расчета огибающей процентилей для последующего периода.
Примечание 4 - Рекомендуется, чтобы во всех расчетах покрытия не учитывались периоды времени, когда робот не перемещался.
Примечание 5 - Все кривые могут быть помещены в отдельных графиках или на одном графике, как на примере графика, показанного на рисунке 16.
Примечание 6 - Показатель, объединяющий характеристику покрытия и характеристику удаления пыли, приведен в приложении В.
|
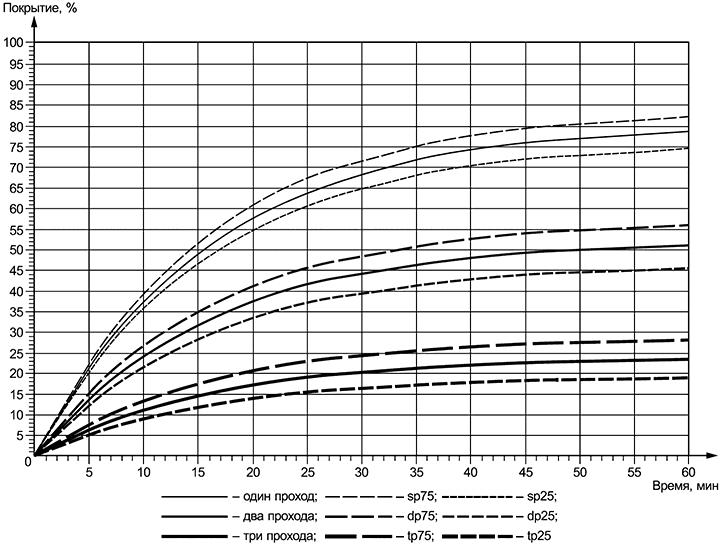
Рисунок 16 - Пример графика результата испытания на покрытие
8 Разное
8.1 Потребление энергии роботом-уборщиком
8.1.1 Общие положения
Данное испытание является общим методом измерения и расчета потребления энергии роботами-уборщиками. Данный метод должен быть основой для последующих определений ежегодного потребления энергии роботами-уборщиками, а также мобильными роботами для домашних работ.
Примечание - Данное испытание можно выполнять вместе с испытанием покрытия (раздел 7).
8.1.2 Условия проведения испытания
8.1.2.1 Условия в помещении для испытания
Для испытаний по измерению потребления энергии температура и влажность окружающей среды должны быть зафиксированы в протоколе.
Примечание - Условия освещенности определены в 9.3.3.
8.1.2.2 Зарядка робота-уборщика
Длительность зарядки и режим технического обслуживания следует определить с помощью представленной ниже последовательности действий. Указанные действия следует выполнять по порядку до тех пор, пока длительность зарядки не будет установлена.
1) Если зарядное устройство, робот, сама аккумуляторная батарея или любой вид пользовательского интерфейса (например, приложение) имеет индикатор, показывающий, что батарея заряжена полностью, то данный индикатор может быть использован следующим образом:
- если индикатор показывает, что батарея полностью заряжена в пределах 19 часов, то испытание должно быть завершено через 24 часа;
- в противном случае, если индикатор полного заряда не сработает в течение 19 часов зарядки, то испытание следует продолжить в течение пяти часов после срабатывания индикатора.
2) Если индикатора нет, но в инструкциях изготовителя указано, что зарядка данной батареи или данной емкости батареи должна быть завершена в течение 19 часов, то зарядка должна длиться 24 часа. Если в инструкциях указано, что зарядка может длиться более 19 часов, то длительность зарядки должна быть равна самому длительному ожидаемому времени зарядки плюс пять часов.
3) Если индикатора нет и оценка времени зарядки в инструкциях отсутствует, но зарядный ток указан на зарядном устройстве или в инструкциях, то длительность зарядки выбирается как максимальная величина из значения 24 часа и значения, вычисленного по формуле
![]() ,
,
где D - длительность зарядки, часы;
- номинальная зарядная емкость, А·ч;
- зарядный ток, А.
4) Если не имеет место ничего из перечисленного выше, то длительность зарядки должна быть 24 часа.
8.1.2.3 Выбор селективных функций
Рабочий режим, используемые принадлежности и пользовательские селективные установки, при которых выполняют испытания, должны быть указаны в протоколе. Если данное испытание должно быть выполнено в целях сравнения, то рабочий режим и установки должны быть выбраны как можно более одинаковыми.
8.1.2.4 Измерительные приборы
Все измерения мощности должны быть выполнены в соответствии с МЭК 62301.
8.1.3 Метод испытания
Общие режимы измерения потребления энергии роботами-уборщиками определены следующим образом:
1) Док-станция без робота-уборщика.
Рабочий пример: робот не подключен к док-станции во время работы и не готов к зарядке. Док-станция подключена к сети.
Потребление энергии док-станцией следует измерять в течение не менее одного часа. После периода прогрева в течение 30 минут среднее значение за оставшиеся 30 минут следует зафиксировать как потребление энергии. Если в течение последних 30 минут произошел перепад или изменение потребления энергии, то период измерения необходимо увеличить до тех пор, пока потребление энергии не будет стабильным в течение 30 минут. Для устройств без док-станции измерение должно быть выполнено с использованием энергопотребления адаптера без нагрузки.
Определение перепада: изменение мощности относительно среднего потребления мощности более чем на 20% дольше 1 минуты.
Определение стабильного состояния: отсутствие перепада в течение 30 минут.
Для режима 1 "Док-станция без робота-уборщика" среднее потребление энергии должно быть рассчитано и зафиксировано. Среднее потребление энергии определяют как измеренное потребление энергии, деленное на время измерения 30 минут. В течение 30-минутного измерения робот должен первые 15 минут осуществлять уборку в присутствии док-станции, а на последующие 15 минут робот должен быть выключен.
Если между роботом и док-станцией нет связи во время процесса уборки, то присутствие робота не требуется для данного испытания.
Примечание - Это эквивалентно режиму готовности док-станции без робота.
2) Измерение потребления энергии во время зарядки после работы по уборке испытательного стенда, соответствующего описанию в 9.3.
Необходимо запустить полностью заряженного робота. Если у робота есть док-станция, то робота следует поместить на док-станцию, находящуюся в позиции 2 (см. рисунок 15), в противном случае следует поместить робота в позицию 2 на испытательном стенде, чтобы робот возобновил работу. Подождать, пока робот не сообщит, что работа завершена. Если данного сообщения нет, а робот вернулся на док-станцию, то следует подождать пять часов, чтобы посмотреть, возобновил ли робот работу автоматически.
Если робот возобновил работу, то измерение потребления энергии и время работы должны включать эти промежуточные циклы подзарядки. Если робот не возобновил работу, то время работы должно включать только время до возврата робота к док-станции.
Если у робота нет функции автоматического возврата к док-станции, то робот должен быть помещен на док-станцию после получения сообщения о завершении работы.
Потребление энергии должно быть измерено в течение времени, указанного в 8.1.2.2.
Потребление энергии в режиме 2 должно включать энергию, потребленную за время от момента первого появления робота на док-станции до момента стабилизации мощности в соответствии с МЭК 62301 на среднем уровне в режиме 3.
Начало измерения в режиме 2 соответствует первому появлению робота на док-станции. Завершение режима 2 (или начало режима 3) определяют на основе среднего уровня мощности, рассчитанного исходя из потребления энергии, измеренного в течение последних четырех часов.
Примечание - Некоторые роботы могут не начать зарядку и/или зарядиться полностью после возврата на док-станцию.
3) Полностью заряженный робот на док-станции.
Мощность в режиме 3 - это средняя мощность, рассчитанная на основании потребления энергии, измеренного за последние четыре часа испытания при минимальной длительности зарядки, как определено в 8.1.2.2.
Период времени для измерения потребления энергии определен в таблице 7.
Таблица 7 - Длительности времени и значения, подлежащие регистрации
Режим | Описание | Длительность измерения | Регистрируемые значения |
1 | Док-станция без робота-уборщика | 30 минут | Среднее потребление мощности |
2 | Измерение потребления энергии во время зарядки после работы на стенде испытания навигации | Зависит от зарядки и времени работы | Общее потребление энергии |
3 | Полностью заряженный робот на док-станции | 4 часа | Средняя мощность |
где | |||
Примечание 1 - Режим 3 является важным этапом использования робота, но детали данного режима еще не согласованы. Методы измерения для режима 3 пока не включены в настоящий стандарт, так как сложности зарядных систем и связанные с ними технологии создают трудности для разработки объективного и непротиворечивого метода.
Примечание 2 - Для режима 3 можно использовать последние четыре часа измерения в режиме 2.
Примечание 3 - Предполагается, что зона покрытия и время работы в данном испытании будут подобны результатам испытания, определенного в разделе 7 (испытания покрытия).
8.2 Акустический шум в воздухе
Если требуется измерение акустического шума в воздухе, то он должен быть измерен в соответствии с МЭК 60704-2-17 и МЭК 60704-1.
Примечание - Возможная последовательность действий для статистического определения декларированных значений шума описана в МЭК 60704-3.
8.3 Скорость уборки при прямолинейном движении
8.3.1 Общие положения
Для данного испытания используют метод определения средних значений максимальных скоростей уборки при прямолинейном движении робота по ковру и твердому полу.
8.3.2 Подготовка
8.3.2.1 Испытательный стенд
См. 9.3.
Исключение: удалить всю мебель с ножками (стол, стулья и диван). Заменить ковер ковром уилтонского типа, соответствующим IEC/TS 62885-1.
8.3.2.2 Предварительная подготовка пола для испытания
См. 5.2.2.
8.3.2.3 Предварительная очистка робота-уборщика
См. 7.2.2.2.
8.3.2.4 Система отслеживания пространственного расположения (СОПР)
См. 7.2.2.3.
8.3.3 Метод испытания
Робот должен быть размещен и запущен с позиции 2, показанной на рисунке 15.
Робот-уборщик должен выполнять свою функцию активной очистки до тех пор, пока он не остановится автоматически.
Общая продолжительность испытания должна контролироваться с помощью СОПР. После завершения запуска СОПР должна предоставить пространственные расположения робота на протяжении данного запуска с интервалами 500 мс.
Скорость уборки при прямолинейном движении, , измеренную на твердом деревянном полу, обозначают
![]() , а скорость уборки при прямолинейном движении,
, а скорость уборки при прямолинейном движении, , измеренную на ковре, обозначают
![]() . Скорость
. Скорость ![]() должна быть получена с использованием пространственных расположений на ковре, а скорость
должна быть получена с использованием пространственных расположений на ковре, а скорость ![]() должна быть получена с использованием пространственных расположений в зоне, размер которой совпадает с размером ковра, и которая расположена на расстоянии 100 мм от ковра и вертикально выровнена с ковром, как показано на рисунке 17. Скорость робота следует измерять только тогда, когда весь корпус робота находится внутри соответствующей зоны измерения.
должна быть получена с использованием пространственных расположений в зоне, размер которой совпадает с размером ковра, и которая расположена на расстоянии 100 мм от ковра и вертикально выровнена с ковром, как показано на рисунке 17. Скорость робота следует измерять только тогда, когда весь корпус робота находится внутри соответствующей зоны измерения.
На основании этих данных средняя скорость робота должна быть рассчитана в соответствии с 8.3.4.
|
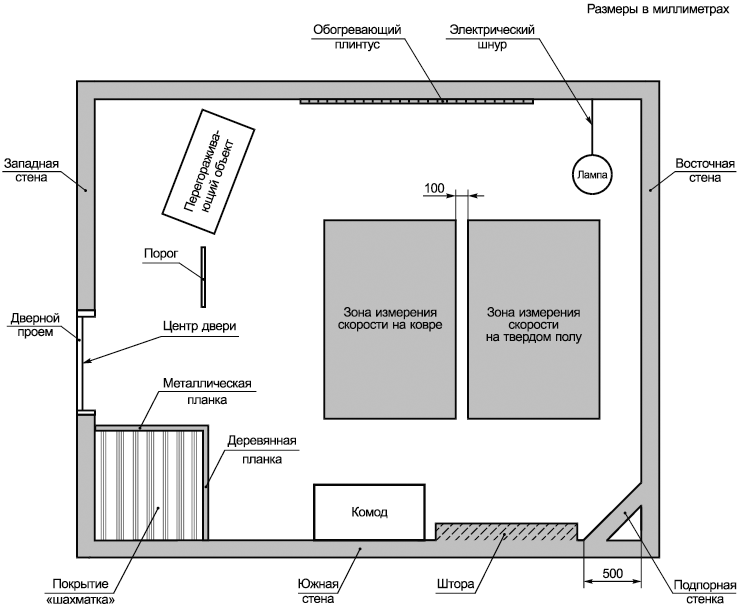
Рисунок 17 - Зоны измерения скорости прямолинейного движения
8.3.4 Метод измерения скорости уборки при прямолинейном движении
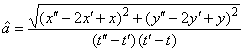
Для трех пространственных расположений (x, y, ), (x', y',
), (x", y",
) в моменты времени t, t' и t" скорость прямолинейного движения,
, между двумя точками может быть определена с помощью следующих уравнений в предположении, что вращательная и поступательная скорости постоянны между этими точками:
![]()
![]()
![]()
![]()
 ,
,
где - разница времени между последовательными пространственными расположениями, с;
d - разница между последовательными пространственными расположениями, м;
- поступательная скорость между последовательными пространственными расположениями, м/с;
- поступательное ускорение между последовательными пространственными расположениями, м/с
;
- вращательная скорость между последовательными пространственными расположениями.
Интерес представляет только средняя скорость прямолинейного движения по твердому полу и по ковру. Поэтому необходимо выделить только последовательные пары пространственных расположений из данных СОПР, которые представляют робота при перемещении по прямой линии. Этого можно добиться удалением пар, представляющих неподвижное состояние робота и его вращательное движение, а также ускорение и торможение.
Пары пространственных расположений должны быть удалены, если истинным является любой из следующих критериев:
2 см/с,
1
0 град/с,
2 см/с.
Необходимо подсчитать число оставшихся пар пространственных расположений. Следует выполнить дополнительные запуски уборки (следуя подготовке, определенной в 8.3.2 для каждого запуска) до тех пор, пока не накопится 250 пар пространственных расположений для ковра и 250 пар пространственных расположений для твердого пола. Эти данные все еще могут содержать большие колебания, особенно на ковре (где направление ворса влияет на скорость робота). Чтобы получить более согласованные результаты, необходимо рассортировать пары пространственных расположений по скорости и выбрать только значения, расположенные между 85-м и 99-м процентилями (соответствующие высокой скорости).
Примечание - Например, в наборе из 100 значений 85-й процентиль означает 85-е значение при сортировке снизу вверх.
Из оставшихся пар пространственных расположений, которые теперь представляют моменты времени, когда робот осуществляет прямолинейное движение с максимальной скоростью, можно рассчитать среднюю скорость прямолинейного движения, ![]() - это среднее значение всех оставшихся пар пространственных расположений в испытательной зоне на твердом полу, а
- это среднее значение всех оставшихся пар пространственных расположений в испытательной зоне на твердом полу, а ![]() - это среднее значение всех оставшихся пар пространственных расположений в испытательной зоне на ковре.
- это среднее значение всех оставшихся пар пространственных расположений в испытательной зоне на ковре.
9 Испытательные материалы и оборудование
9.1 Испытательный стенд прямолинейного движения
9.1.1 Твердый пол
Длина и ширина испытательного стенда должны быть 2000 (минимум) 600 мм, как показано на рисунке 18.
|
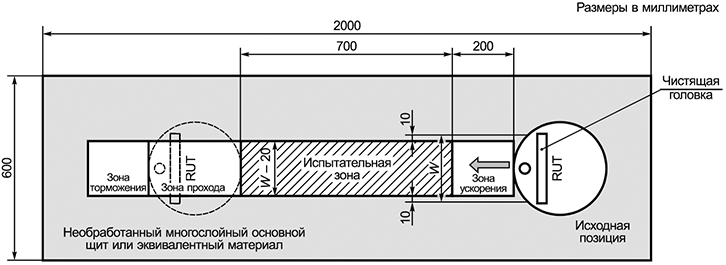
W - ширина чистящей головки робота; RUT- испытываемый робот
Рисунок 18 - Конфигурация испытательного стенда с твердым полом для прямолинейного движения
Площадь испытательной зоны должна составлять 700(W-20) мм, где W - ширина чистящей головки робота.
Примечание - Уменьшение ширины испытательной зоны на 20 мм сделано для того, чтобы избежать распространения пыли роботом за ее пределы. Дополнительные 200 мм на каждом конце испытательной зоны предусмотрены для того, чтобы позволить роботу достичь своей заданной скорости до того, как он войдет в испытательную зону.
Испытательный пол должен быть сделан из необработанного многослойного соснового щита или эквивалентного материала, а его толщина должна составлять не менее 15 мм.
9.1.2 Ковер
Испытательный стенд идентичен стенду, определенному в 9.1.1, за исключением того, что пол покрыт испытательным ковром, в качестве которого используют ковер уилтонского типа, соответствующий IEC/TS 62885-1. На рисунке 19 показана конфигурация испытательного стенда.
|
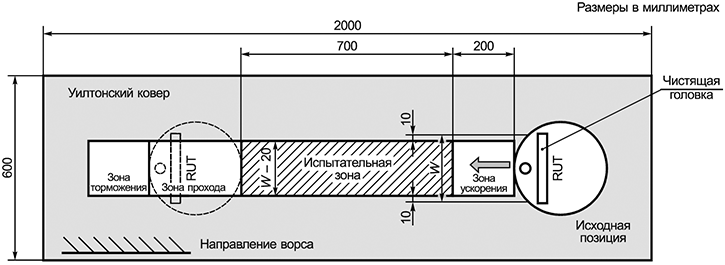
W - ширина чистящей головки робота; RUT- испытываемый робот
Рисунок 19 - Конфигурация испытательного стенда с ковром для прямолинейного движения
9.2 Испытательный стенд мобильности
9.2.1 Основная конфигурация испытательного стенда
Длина и ширина испытательного стенда должны быть равны 2000х1150 мм, как показано на рисунке 20. Высота стены, окружающей пол испытательного стенда, должна составлять 300 мм. Внутренняя сторона стены должна иметь цвет необработанной сосновой древесины. Высота потолка помещения, в котором выполняют испытание, не должна быть более 3500 мм. Испытательный пол должен быть изготовлен из необработанного многослойного соснового щита или эквивалентного материала толщиной не менее 15 мм. Данный прямоугольник является основной конфигурацией для каждого испытания мобильности. Для каждого испытания мобильности необходимо дополнительное оборудование, которое описано ниже для каждого испытания.
|
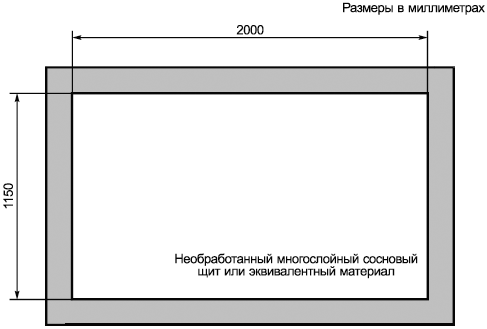
Рисунок 20 - Основная конфигурация испытательного стенда для испытания мобильности
9.2.2 Дополнительное оборудование для определения минимальной проходимой ширины прохода
Для определения минимальной проходимой ширины прохода к основной конфигурации испытательного стенда добавляют регулируемую стену или эквивалентное оборудование, как показано на рисунке 21. Регулируемая стена должна быть размещена посередине длинной стороны прямоугольника. Высота каждой части дополнительной стены равна 300 мм, и обе части изготовлены из необработанного многослойного соснового щита. В качестве примера на рисунке 22 показаны детали конструкции стены. Часть 1 стены должна быть закреплена на испытательном стенде (например, с помощью фиксирующей задвижки). Подвижная часть 2 стены перемещается вдоль части 1. Необходимо обеспечить отсутствие прогибания стены даже в том случае, если робот-уборщик натолкнется на нее. Поэтому на испытательном стенде по мере необходимости должна быть обеспечена дополнительная опора, если она не будет мешать роботу.
|
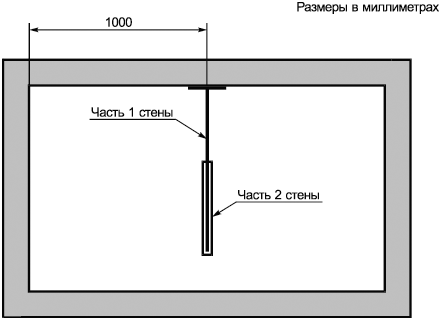
Рисунок 21 - Испытательный стенд с дополнительной подвижной стеной
|
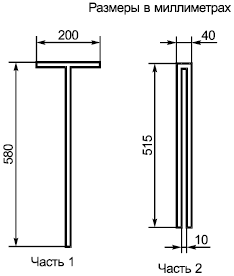
Рисунок 22 - Части 1 и 2 стены
9.2.3 Дополнительное оборудование для определения минимальной проходимой высоты проема
Для данного испытания к испытательному стенду добавляют туннель, как показано на рисунке 23. Потолок туннеля изготовлен из необработанного многослойного соснового щита с габаритами 1150х665х20 мм. Обе стороны туннеля должны иметь переднюю панель высотой 150 мм. Потолок должен быть закреплен на распорках, длина и ширина которых составляет 40х40 мм. Распорки имеют переменную высоту, которая определяет размер проема. Эквивалентное испытательное оборудование также может быть использовано для создания и регулировки туннеля. Туннель размещают посередине испытательного стенда. Препятствие не должно сдвигаться роботом-уборщиком, и при необходимости туннель может быть прикреплен к окружающим стенам.
|
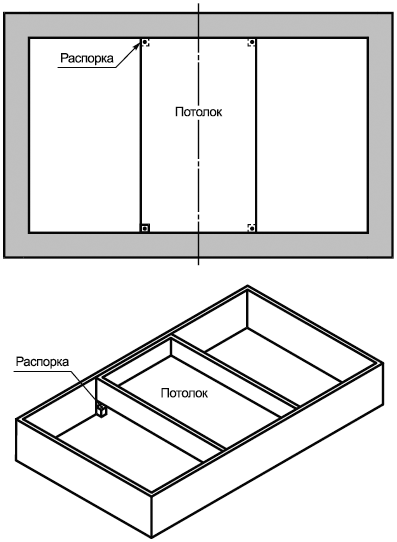
Рисунок 23 - Испытательный стенд с дополнительным туннелем
Для того, чтобы провести испытания на всех дискретных размерах проема до 200 мм, предлагается использовать набор, состоящий из распорок с размерами 4x100 мм, 4х50 мм, 8х20 мм, 4x10 мм и 4х5 мм. Рекомендуется использовать минимальное число распорок для создания нужной высоты.
Примечание - Для того, чтобы предотвратить значительное прогибание потолка, допускается добавить, например, дополнительные ребра жесткости на верхней части туннеля.
9.2.4 Дополнительное оборудование для определения максимальной проходимой высоты степени
Для данного испытания на испытательный стенд устанавливают дополнительную ступень, как показано на рисунке 24. Ступень размещают в левой половине испытательного стенда. Ступень должна быть изготовлена из необработанного дуба или эквивалентного деревянного материала. Внешний край ступени должен иметь закругление с радиусом 3 мм. Также могут быть использованы эквивалентные способы построения и регулировки ступени.
Примечание - Допускается использовать разные прокладки для формирования разной высоты ступени h. Для прокладок, формирующих нужную высоту, не обязательно использовать необработанный дуб или эквивалентный материал.
|
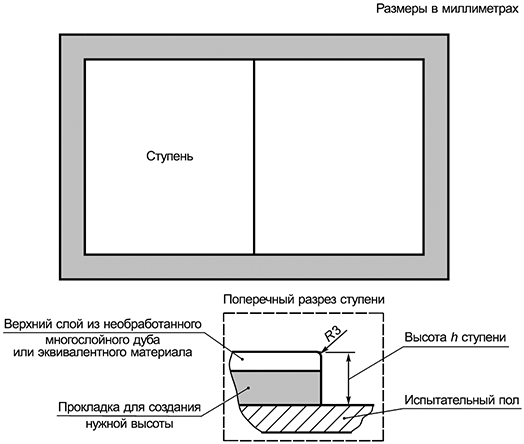
Рисунок 24 - Испытательный стенд с дополнительной ступенью и ее поперечный разрез
9.2.5 Дополнительное оборудование для определения максимальной проходимой высоты порога
Для данного испытания на середину испытательного стенда устанавливают дополнительный порог, как показано на рисунке 25. В данном испытании используют два разных типа порогов - цилиндрический и прямоугольный (см. рисунок 26). Высотой цилиндрического порога является диаметр полной окружности. Прямоугольные пороги имеют ширину 40 мм и закругленные края с радиусом 3 мм. Пороги должны быть изготовлены из алюминия с неотшлифованной или необработанной поверхностью. Дополнительный порог должен быть закреплен на испытательном стенде так, чтобы он не мог быть сдвинут в любом направлении (например, качением или сгибанием).
Примечание - Допускается использовать разные прокладки для формирования разной высоты порога h. Прокладки, формирующие нужную высоту, не обязательно изготавливать из алюминия.
|
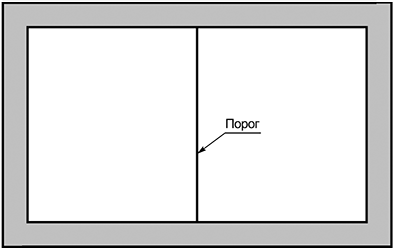
Рисунок 25 - Испытательный стенд с дополнительным порогом
|
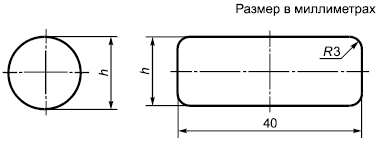
Рисунок 26 - Чертежи цилиндрического и прямоугольного порогов
9.3 Испытательный стенд зоны покрытия
9.3.1 Конфигурация пола
Испытательная зона должна представлять собой пространство с размерами 4000х5000 мм (LW) (с допуском ±50 мм), ограниченное четырьмя стенами и потолком. Потолок должен быть расположен на высоте 2500 мм (±50 мм) от поверхности пола испытательного стенда (не следует измерять высоту потолка от плитки, бруса, ковра или других препятствий).
Пол должен быть изготовлен из необработанной сосны в виде досок, многослойного или листового материала. Поверхность должна быть сплошной, без бугров, выемок и/или вздутий. Любые пустоты между досками, многослойными листами или панелями не должны превышать 1 мм. Пол должен находиться в одной плоскости с расхождениями не более 0,5 мм между любыми сегментами поверхности пола, если только иное не указано в других разделах настоящего стандарта (ковер, ступени, пороги, плитка и т.д.). Если пол изменяется так, что его размещение в одной плоскости находится вне установленного допуска, то пол может быть подвергнут пескоструйной обработке песком 120-150 грит; однако многослойный или листовой материал нельзя обрабатывать песком, чтобы не обнажить клеевой и/или другие слои пола.
Пол испытательного стенда для испытания характеристик навигации/зоны покрытия должен соответствовать рисункам 27-31. Мебель и препятствия должны быть размещены в соответствии с рисунком 27. Размеры и параметры мебели и препятствий, размещенных на полу, указаны в таблице 8.
Все поверхности с нанесенным покрытием, определенные в настоящем стандарте, должны соответствовать руководству по блеску поверхности, изложенному в ИСО 2813.
|
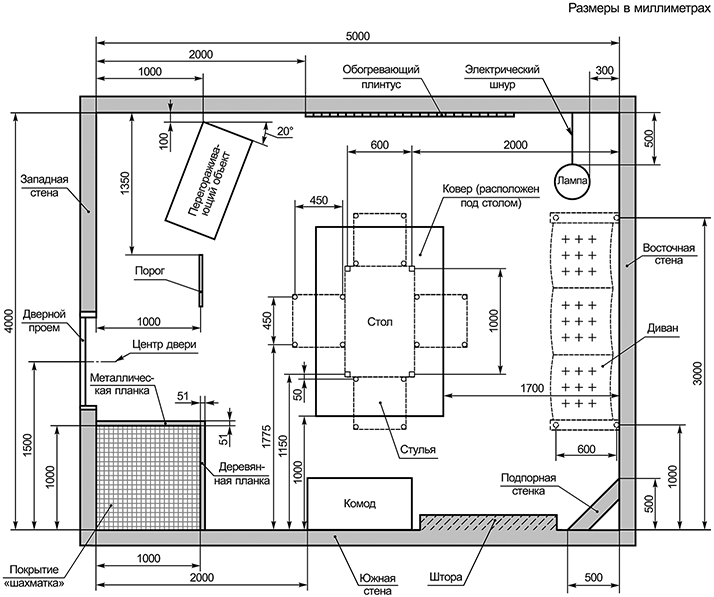
Рисунок 27 - Конфигурация стенда для испытания навигации/зоны покрытия
|
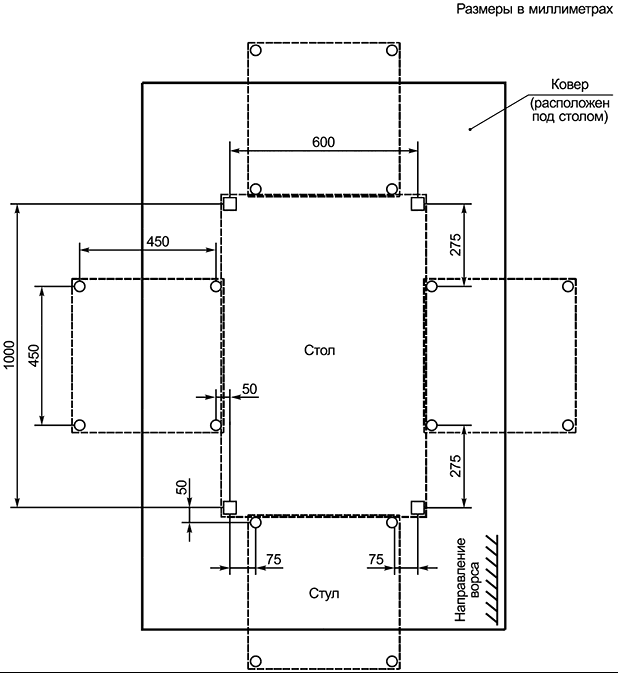
Рисунок 28 - Детальное изображение препятствий вокруг стола
Таблица 8 - Размеры мебели и препятствий
Предмет | Коли- | Размеры, мм | Поверхность/Цвет | Примечание | |
Комод | 1 | 1000 (L) | Белый | Прикреплен к полу. | |
Стол | 1 | 1000 (L) | Натуральная вишня, дерево (необработанное) или гладкая поверхность с RGB | 4 ножки 40 (L) х 40 (W) | |
Стулья | 4 | 450 (L) | Натуральная вишня, дерево (необработанное) или гладкая поверхность с RGB | 4 ножки 35 (D) | |
Диван | 1 | 2000 (L) | Белый | 4 ножки 48 (D) | |
Перегора- | 1 | 1000 (L) | Серый | Ножек нет. | |
Напольная лампа | 1 | 330 (D) | Белый | Основание 5 мм (Н) по внешнему краю с фаской под углом 10°. | |
Напольный электрический шнур | 1 | 6 (D) | Черный | Один конец соединен с вилкой на северной стене на высоте 350 мм, а другой конец закреплен под северной стороной основания лампы (выемка в основании лампы). Не закреплен на полу и должен иметь непрерывную длину не менее 850 мм и не более 900 мм между вилкой и краем основания лампы. | |
Цилиндрический стержень | 1 | 15 (D) | Необработанная или неотшлифованная поверхность | Цилиндрической формы, изготовлен из алюминия. | |
Обогревающий плинтус | 1 | 2000 (L) | Натуральная вишня, дерево (необработанное) или гладкая поверхность с RGB | Крепится к стене и полу. | |
Ковер | 1 | 1680 (L) | Слоновая кость (цвет уилтонского ковра или его аналога) | Уилтонский ковер или его аналог. | |
Покрытие "шахматка" | 1 | 1000 (L) | Черный и белый | Каждая плитка квадратной формы и одного размера: 110 мм (ширина и длина) | |
Металлическая планка | 1 | 51,0 (W) | Необработанный или покрытый светлым порошком/ анодированный алюминий | Изготовлена из алюминия. | |
Деревянная планка | 1 | 51,0 (W) | Нешлифованный светлый клен или подобная светлая древесина | Изготовлена из дерева. | |
Обозначения: |
| ||||
Все цвета указаны в цветовом формате RGB и являются ориентировочным указанием для определения цвета. Цвет может варьироваться в пределах ±5 для каждого значения RGB. | |||||
|
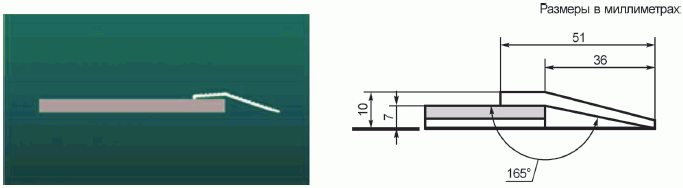
Рисунок 29 - Иллюстрация установки металлической планки
|
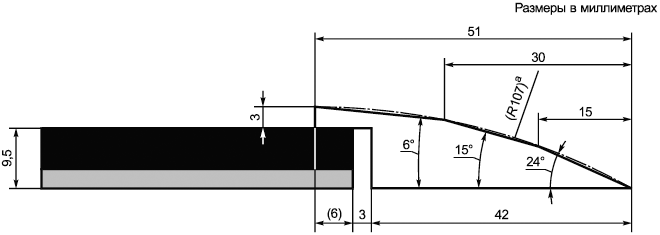
_______________
Только справочно.
Рисунок 30 - Иллюстрация установки деревянной планки
|
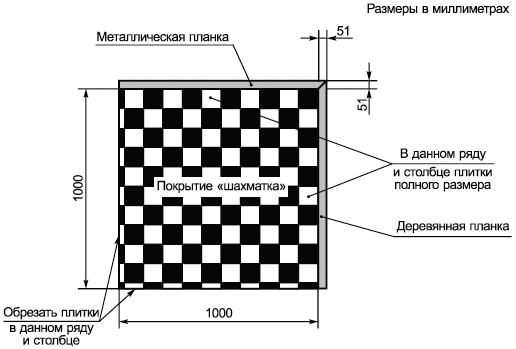
Рисунок 31 - Детальный вид установки покрытия "шахматка" и планок
9.3.2 Конфигурация стен и потолка
9.3.2.1 Общие положения
Конфигурация стен и потолка испытательного стенда должны соответствовать рисунку 32. Потолок должен находиться на высоте 2500 мм (±50 мм) от поверхности пола испытательного стенда (не следует измерять высоту потолка от плитки, бруса, ковра или других препятствий). Потолок должен быть ровным и параллельным полу с допуском ±6 мм по всей площади потолка.
|
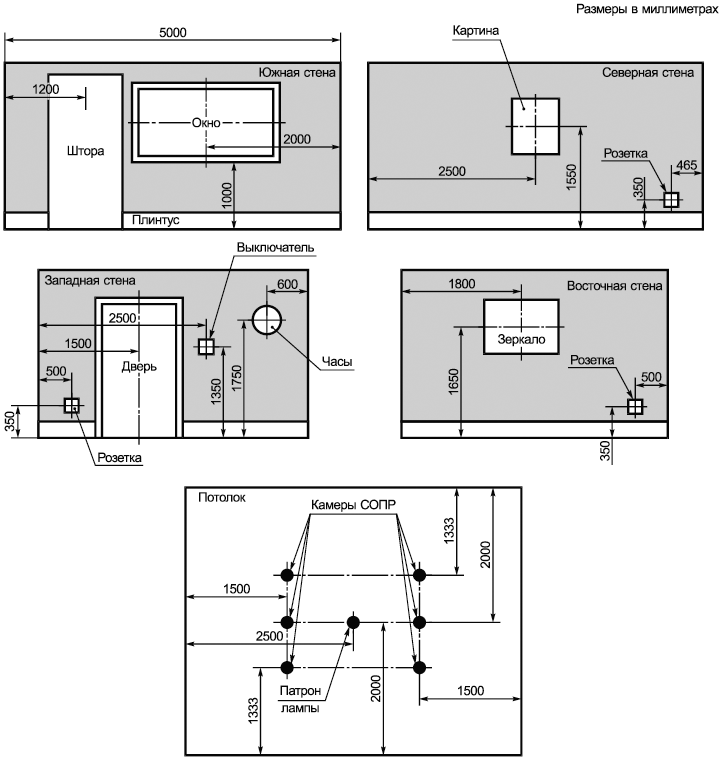
Рисунок 32 - Конфигурация четырех стен и потолка
В таблице 9 приведен список объектов и характерных особенностей, которые должны присутствовать на стенах, никакие другие видимые объекты недопустимы. В таблице 9 также приведены размеры, характеристики и расположение каждого элемента.
Таблица 9 - Отделка стен и потолка
Элемент | Коли- | Размеры, мм | Детали поверхности | Примечание | |
Северная стена | 1 | 5000 (L) | Магнолия | Все стены должны быть установлены так, чтобы они не смещались и не деформировались при контакте с ними робота. | |
Южная стена | 1 | 5000 (L) | Магнолия RGB #EEE8EB | См. выше. | |
Восточная стена | 1 | 4000 (L) | Магнолия RGB #EEE8EB | См. выше. | |
Западная стена | 1 | 4000 (L) | Магнолия RGB #EEE8EB | См. выше. | |
Потолок | 1 | 4000 (W) | Магнолия | См. выше. | |
Дверь | 1 | 750-850 (W) | Белая | См. рисунок 33 и относящийся к нему текст. | |
Дверной косяк | 1 | 19-26 (T) | Белая | См. рисунок 33. | |
Дверной упор | 1 | 6-9 (T) | Белая | См. рисунок 33. | |
Прямоугольный наличник | 1 | 10-18 (T) | Белая | См. рисунок 33, а толщина (T) наличника должна быть такой же, как у плинтуса. | |
Окно | 1 | 1800-2200 (W) | Рама: белая | См. рисунок 34 и относящийся к нему текст. | |
Плинтус | 4 | 75-125 (H) | Северная и западная стороны: белые | См. рисунок 35 и относящийся к нему текст. | |
Подпорная стенка | 1 | 300 (H) | Необработанная сосна или эквивалентный материал | ||
Выключатель | 1 | 70-110 (W) | Пластик: белый | Одиночный выключатель. Не должен быть подключен к освещению в испытательной зоне. | |
Розетка | 1 | 70-110 (W) | Пластик: белый | Одиночная розетка. Не требуется подключение к сети. | |
Патрон подвесной лампочки | 1 | 250-300 (L) | Белый | Длина указывает расстояние от потолка до основания лампочки | |
Камеры СОПР | 2-4 | Установлены на одном уровне с потолком | |||
Часы | 1 | 300 (D) | Рамка: серая | Часы не обязательно должны быть настоящими. См. рисунок 37. | |
Зеркало | 1 | 1000 (W) | Рамка: серая | См. рисунок 38. | |
Картина | 1 | 600 (W) | Рамка: серая | См. рисунок 39. | |
Штора | 1 | 1250-1500 (W) 2000-2200 (H) | Темно-зеленая с отклонением любого красного или зеленого пигментов в пределах 0,5% от следующих значений: 59621D, 4Е5В31, 555025. | Используемый материал должен быть сплошным, непрозрачным и достаточно тяжелым, чтобы висеть без складок. | |
Обозначения: |
| ||||
Все цвета указаны в цветовом формате RGB в шестнадцатеричном коде и являются ориентировочным указанием для определения цвета. Цвет может вариьироваться в пределах ±5 для каждого значения RGB. | |||||
Стены должны занимать всю высоту от пола до потолка без промежутков и разрывов, кроме тех, которые определены в таблице 9. Стены должны быть вертикальными в пределах 4 мм от потолка до пола и располагаться под прямым углом к соседним стенам в пределах 4 мм по всей высоте стены.
Патрон электрической лампочки должен быть расположен в позиции, показанной на рисунке 32. На рисунке 32 также показано предлагаемое размещение камер СОПР на потолке, но эти расположения не являются обязательными.
Эти дополнительные элементы должны быть установлены по возможности на одном уровне с потолком и окрашены в цвет потолка, насколько это возможно.
Стены и потолок должны быть покрыты или окрашены в соответствии с таблицей 9. Поверхности стен и потолка должны быть ровными и не иметь видимой текстуры (максимальное локальное геометрическое отклонение ±1 мм).
Определение и тестирование уровней блеска приведены в ИСО 2813.
9.3.2.2 Спецификация двери
Компоненты и конфигурация двери должны соответствовать рисункам 27, 32 и 33. Дверь должна иметь четыре вставки или фасонные панели. Дверь должна иметь следующие атрибуты:
1) Дверь (из многослойного или сплошного дерева).
2) Ни одной или от двух до четырех петель. Если петли присутствуют, то они не должны быть видны из испытательной комнаты, когда дверь закрыта.
3) Дверная ручка (цилиндрической или плоской формы, серебристого цвета, чистовая обработка щеткой или полировкой).
4) Дверной косяк/рама (дерево, многослойное, или металл, подходящий для удержания веса двери и установки дверных петель).
5) Дверной упор (встроен в раму или прикреплен к раме). Установлен на расстоянии от 1 мм до 1,5 мм напротив двери.
6) Наличник (требуется только для интерьера комнаты, должен иметь толщину, равную толщине плинтуса).
Конфигурация/параметры двери:
1) Дверь должна быть левосторонней конфигурации (петли расположены слева, если открывать дверь наружу от них).
2) Размер двери должен соответствовать размерам, указанным в таблице 9.
3) Расположение двери должно соответствовать размерам/местоположению, указанным на рисунках 27 и 32.
4) Дверь должна быть заглублена относительно внутренней поверхности стены минимум на 50 мм, но не более, чем на 70 мм.
5) Дверь может быть зафиксирована на месте.
6) Дверь должна открываться наружу относительно испытательной зоны (применимо, только если дверь не зафиксирована на месте).
|
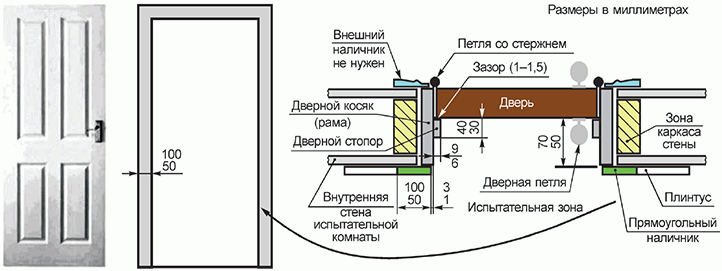
Рисунок 33 - Изображение четырехпанельной двери
9.3.2.3 Спецификация окна
Конфигурация окна должна соответствовать рисунку 34. Окно должно быть помещено в раму белого цвета и должно включать три оконных стекла одинакового размера. Каждое стекло должно быть вставлено в раму. Рамы должны иметь ширину 50-100 мм и выступать от стены на 50-100 мм. Стекла могут быть сделаны либо из стекла, либо из любого прозрачного поликарбонатного материала. Стекло должно быть утоплено относительно фронтальной поверхности рамы на 10-90 мм. На задней стороне окна, за стеклами должна быть установлена панель, окрашенная голубой краской, как указано в таблице 9.
|
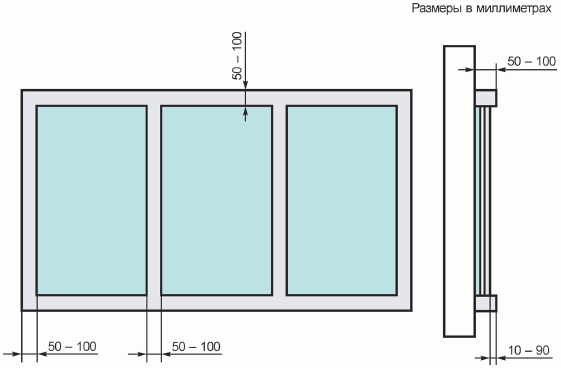
Рисунок 34 - Изображение окна
9.3.2.4 Спецификация плинтуса
Конфигурация плинтуса должна соответствовать рисунку 35. Плинтус может быть профилирован только по верхнему краю с помощью одной криволинейной поверхности с максимальным радиусом 10 мм.
|
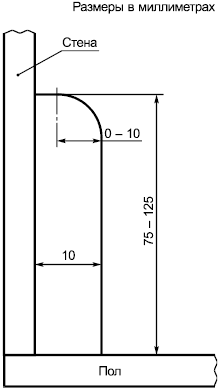
Рисунок 35 - Изображение плинтуса
9.3.2.5 Спецификация подвесного светильника
Конфигурация подвесного светильника должна соответствовать рисунку 36. Высота арматуры подвесного светильника, измеренная от потолка до вершины колбы лампочки, должна составлять 250-300 мм.
|

Рисунок 36 - Изображение подвесного светильника
9.3.2.6 Спецификация часов
Конфигурация часов должна соответствовать рисунку 37. Часы должны быть представлены в виде серой круглой рамки, окружающей белый матовый циферблат. На циферблате не должно быть стрелок и других изображений. Ширина рамки должна составлять 50-75 мм, и рамка должна выступать от стены на 15-50 мм. Циферблат должен быть заглублен от переднего края рамки на 10-40 мм. Внешний диаметр рамки часов должен быть равен 300 мм.
|
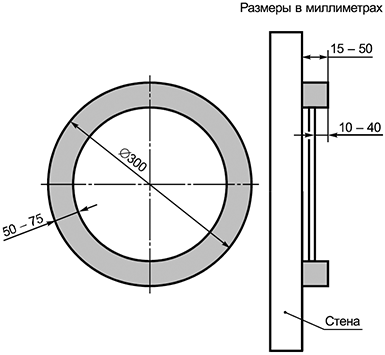
Рисунок 37 - Изображение часов
9.3.2.7 Спецификация зеркала
Конфигурация зеркала должна соответствовать рисунку 38. Зеркало должно быть заключено в серую раму. Ширина рамы должна составлять 100 мм, и рама должна выступать от стены на 50 мм, но не более чем на 100 мм. Зеркало должно быть утоплено от переднего края рамы на 10-90 мм. Само зеркало должно быть изготовлено из плоского зеркального стекла и иметь коэффициент отражения не менее 85%.
|
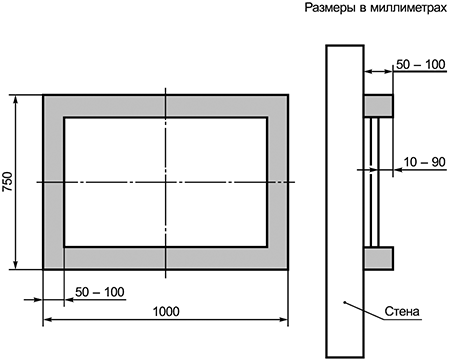
Рисунок 38 - Изображение зеркала
9.3.2.8 Спецификация картины
Конфигурация картины должна соответствовать рисунку 39. Картина должна состоять из зеленой панели, расположенной за прозрачной панелью, и окружающей ее серой рамы. Рама должна иметь ширину 50-100 мм и выступать от стены на 50-100 мм. Прозрачная панель может быть сделана либо из стекла, либо из любого прозрачного поликарбонатного материала. Прозрачная панель должна быть утоплена от переднего края рамки на 10-90 мм. Панель, окрашенная в зеленый цвет, должна быть установлена на задней части рамы за прозрачной панелью.
|
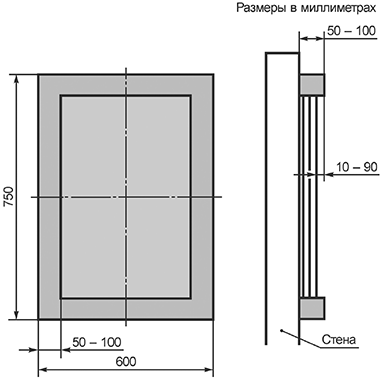
Рисунок 39 - Изображение картины
9.3.2.9 Спецификация шторы
Конфигурация шторы должна соответствовать рисунку 40. Ширина собранной шторы должна быть от 1250 мм до 1500 мм, а ширина материала, использованного для ее изготовления, должна составлять 3400 мм. Штора должна быть повешена так, чтобы амплитуда волнистости, создаваемая складками материала, не превышала 100 мм. Среднее расстояние шторы от стены должно быть равно 100 мм. Способ подвешивания шторы не должен быть виден, когда стоишь перед ней. Между полом и основанием шторы должен быть зазор не менее 5 мм и не более 20 мм.
|
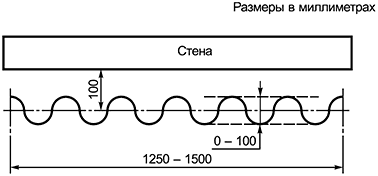
Рисунок 40 - Изображение шторы
9.3.3 Общие условия
Испытательная зона должна быть освещена с использованием компактной люминесцентной лампы, лампы накаливания или светодиодной лампы (предназначенной для использования в помещении), размещенной в подвесном светильнике, как описано в таблице 9. Условия освещения для данного испытания следует поддерживать в пределах от 40 лк до 200 лк с цветовой температурой от 2000 К до 6000 К (измеряют на уровне пола во всех местах).
Если дверь в испытательную зону закрыта, то все освещение в ней выключают, а все наружное освещение, окружающее испытательную зону, включают, при этом ни в одном месте испытательной зоны освещенность не должна превышать 2 лк.
Следует допускать установку любых связанных с безопасностью приборов, предписываемых местным законодательством (например, систем пожаротушения и детекторов дыма на потолке).
10 Инструкция по применению
Инструкции изготовителя по применению должны содержать информацию по использованию робота и его аксессуаров, при их наличии, а также по его очистке, необходимой для обеспечения надлежащего функционирования робота.
Приложение A
(справочное)
Расчет зоны покрытия
A.1 Определения
Система отслеживания пространственного расположения (СОПР) использует две разные системы координат: глобальную систему координат (ГСК), которая соответствует неподвижной системе координат, определяющей испытательную зону, и систему координат робота (СКР), которая необходима для определения геометрических взаимосвязей между любыми параметрами, используемыми для отслеживания, а также расположения чистящей головки робота.
Результатом работы СОПР должна быть регистрация центра средней точки колесной базы (точки, вокруг которой робот поворачивается при развороте на месте) на уровне земли. Ось x должна указывать вперед в направлении движения робота. Ось y должна быть направлена на левое колесо (положительное направление вращения - против часовой стрелки). Ось z должна быть направлена вверх от пола (рисунок A.1). СОПР должна вычислять разницу между отслеживаемыми параметрами и началом СКР и регистрировать точку начала координат СКР в ГСК. Кроме того, СОПР определяет угол поворота, , системы координат робота относительно глобальной системы координат. Каждое пространственное расположение в момент времени t, обозначенное подстрочным индексом i, будет определяться, как минимум, следующей информацией:
,
,
,
.
|
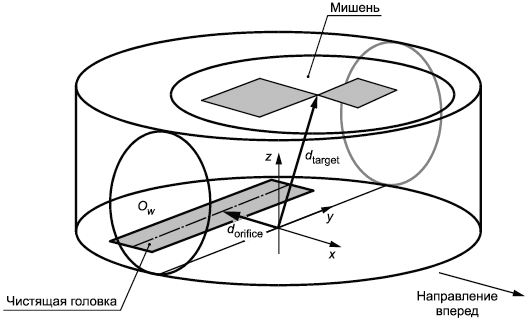
Рисунок A.1 - Система координат робота
Чистящая головка может быть представлена прямоугольником, который по предположению размещен на уровне пола. Смещение чистящей головки от начала координат робота может быть представлено вектором, ![]() и иметь размер
и иметь размер , представляющий ширину чистящей головки. Линия, проходящая через середину чистящей головки и имеющая длину
, будет поэтому называться "линией чистящей головки".
A.2 Расчет зоны покрытия чистящей головкой
Для того, чтобы создать детальную карту покрытия, необходимо создать структуру данных (или несколько структур данных) для отслеживания двух элементов информации для каждого пространственного элемента, который используется для вычисления информации о проходе, и сгенерировать окончательную карту покрытия. Первым важным элементом информации, который необходимо отслеживать, является число раз, за которое чистящая головка покрывала данную зону. Вторым элементом информации, подлежащим отслеживанию, является последний раз, когда чистящая головка покрыла данную зону. Рекомендуется, чтобы эти структуры данных могли представлять ГСК в элементах, которые, как минимум, равны /10. Для принятия решения о размере элемента СОПР также необходимо учесть разрешение и точность (см. 4.10).
Для каждого пространственного расположения, зафиксированного СОПР, вычисления начинают с состояния совпадения СКР и ГСК. То есть у этих систем совпадают начала координат и ориентация осей. Расположение линии чистящей головки в пространстве определяет вектор ![]() . Данный результат сохраняют для последующих преобразований.
. Данный результат сохраняют для последующих преобразований.
Для каждого отслеженного пространственного расположения используют аффинное преобразование для переноса линии чистящей головки и, фактически, всей СКР в надлежащее место в ГСК. Это может быть выполнено с использованием следующего уравнения:
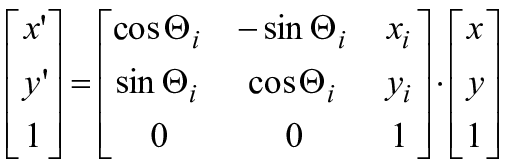
При условии, что ,
- правая и левая крайние точки линии чистящей головки в момент времени
, а
,
- правая и левая крайние точки линии чистящей головки в момент времени
, зону покрытия вычисляют следующим образом.
Рассмотрим многоугольник ,
,
,
(рисунок A.2). Каждый элемент, полностью содержащийся в данном многоугольнике, добавляет свою площадь к зоне покрытия. Каждый элемент, частично входящий в данный многоугольник, вносит свой вклад пропорционально площади покрытия. Каждый элемент, не вошедший в данный многоугольник, не рассматривается.
|
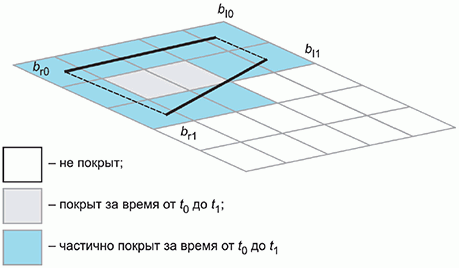
Рисунок A.2 - Шаг расчета зоны покрытия
Далее каждый покрытый или частично покрытый элемент проверяют для того, чтобы убедиться в том, что прошло достаточно времени для того, чтобы чистящая головка реально покинула данную зону. Если чистящая головка не покрыла данный элемент совсем недавно, число проходов покрытия увеличивают на единицу. Независимо от того, было ли увеличено или нет число проходов покрытия, данный элемент модифицируют для того, чтобы отразить тот факт, что чистящая головка была здесь в данном пространственном расположении.
Существует несколько дополнительных возможностей, которые могут быть использованы для повышения точности конечного результата. Одной из рекомендуемых возможностей является увеличение плотности элементов, представляющих испытательную зону, за счет уменьшения их площади до 1 см или меньше.
Другой возможностью является рассмотрение частично покрытых элементов и увеличение покрытия с использованием десятичных дробей, т.е. элемент, покрытый чистящей головкой на 30%, увеличивает зону покрытия на 0,3 прохода вместо 0 проходов.
Приложение B
(справочное)
Комплексный показатель уборки
Если требуется один показатель производительности, объединяющий показатель покрытия и показатель сбора пыли, то существуют разные способы объединения измерений показателей, определенных в настоящем стандарте. Пример такого способа создания показателя производительности, названного комплексным показателем уборки (), представлен в форме руководства. Комплексный показатель уборки рассчитывают с использованием результатов измерения характеристики удаления пыли при прямолинейном движении и результатов измерения характеристики автономной навигации/зоны покрытия следующим образом:
![]() ,
,
где ![]() - комплексный показатель уборки за время t,
- комплексный показатель уборки за время t,
- средняя скорость покрытия области, пройденной точно k раз чистящей головкой в момент времени t (k=1, 2,. .., N) при испытании автономной навигации/зоны покрытия (в процентах). Это значение можно получить следующим образом (подробные определения приведены в 7.4):
![]() ,
, ![]() ,
, ![]() , …
, …
- окончательный суммарный коэффициент удаления пыли после k-кратного прохода (в процентах). Данное значение берут из результатов испытания по удалению пыли при прямолинейном движении из раздела 5,
N - максимальное число проходов чистящей головки, учитываемое при вычислении .
Изменение комплексного показателя уборки во времени, ![]() , может быть представлено на графике с 25-м процентилем и 75-м процентилем. Разрешение по времени и разрешение в процентах для данного графика можно регулировать с помощью условий, перечисленных в 4.10.
, может быть представлено на графике с 25-м процентилем и 75-м процентилем. Разрешение по времени и разрешение в процентах для данного графика можно регулировать с помощью условий, перечисленных в 4.10.
Примечание - Приложение B не было изменено, чтобы отразить все показатели уборки из раздела 5. Это будет предметом рассмотрения в будущем.
Приложение C
(справочное/обязательное)
Подробные изображения способности удаления волокон
|
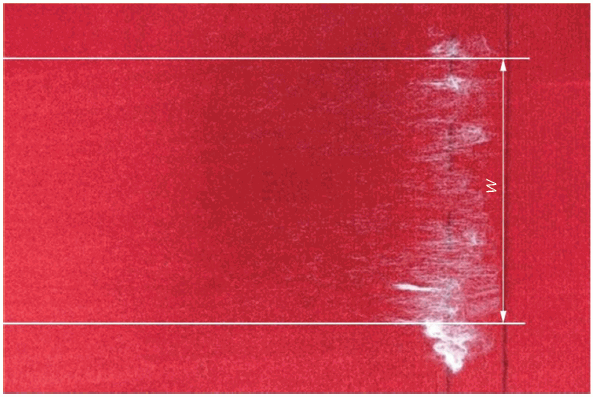
a)
|
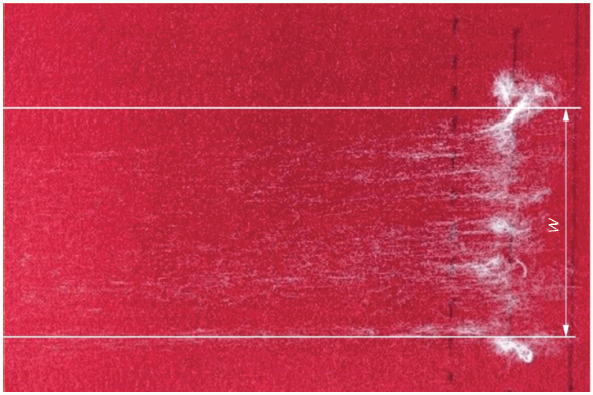
b)
Рисунок C.1 - Подробные изображения для рейтинга 1
|
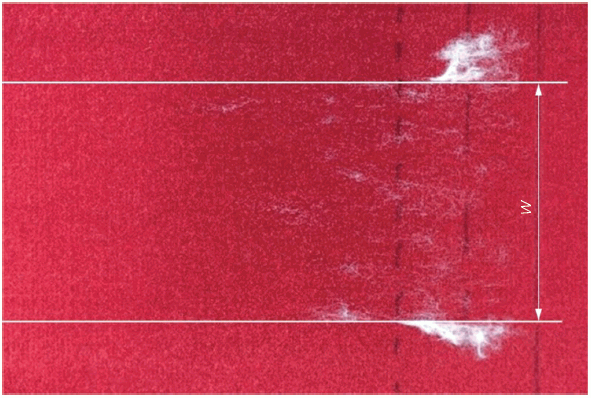
a)
|
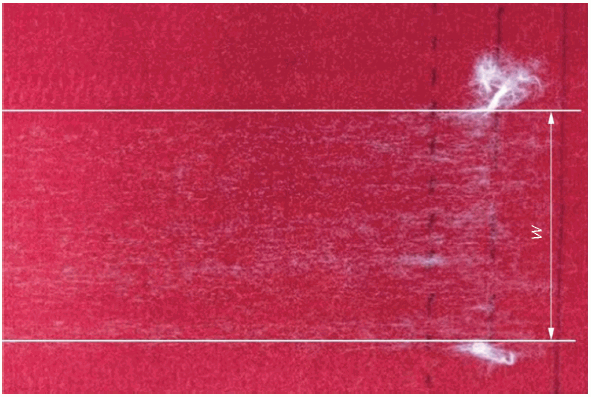
b)
Рисунок C.2 - Подробные изображения для рейтинга 2
|
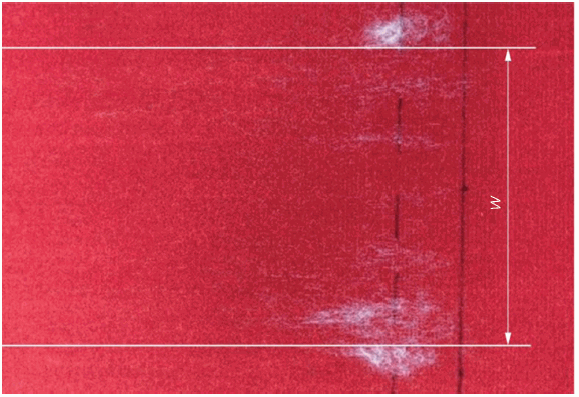
a)
|
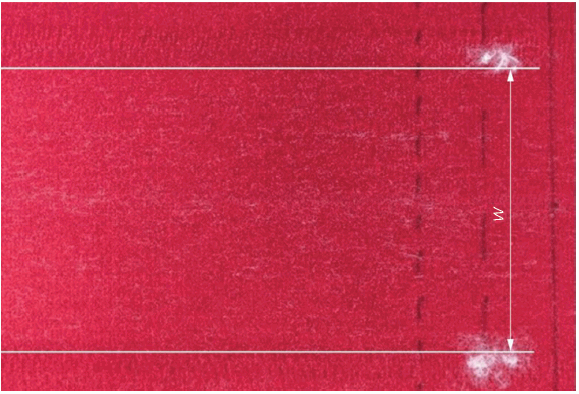
b)
Рисунок C.3 - Подробные изображения для рейтинга 3
|
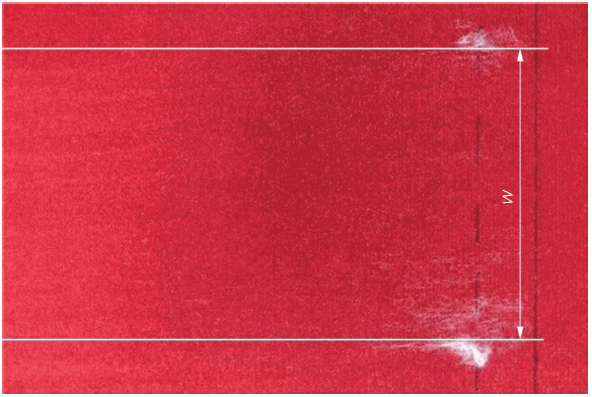
a)
|
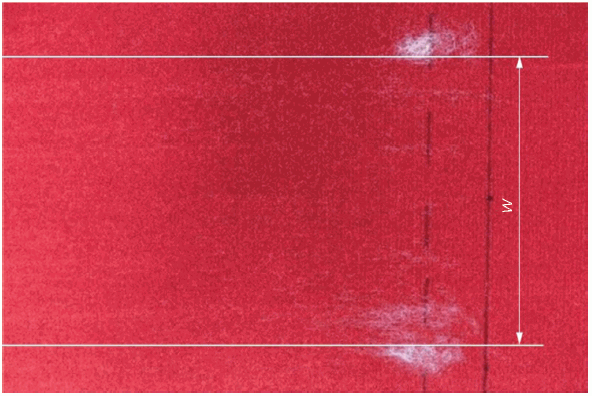
b)
Рисунок C.4 - Подробные изображения для рейтинга 4
|
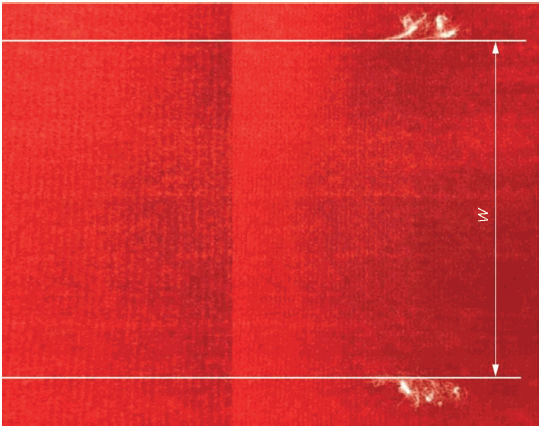
a)
|
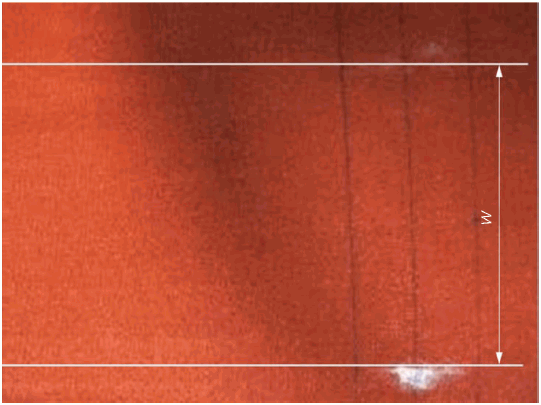
b)
Рисунок C.5 - Подробные изображения для рейтинга 5
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным и межгосударственным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального, межгосударственного стандарта |
IEC 62301 | IDT | ГОСТ IEC 62301-2016 "Электроприборы бытовые. Измерение потребляемой мощности в режиме ожидания" |
IEC/TS 62885-1 | - | * |
IEC 62885-2:2016 | - | * |
IEC 60704-1 | IDT | ГОСТ Р МЭК 60704-1:2018 "Приборы электрические бытовые и аналогичного назначения. Испытательный код по шуму. Часть 1. Общие требования" |
IEC 60704-2-17 | - | * |
ISO 554 | - | * |
ISO 2813 | - | * |
* Соответствующий национальный стандарт отсутствует. До его принятия рекомендуется использовать перевод на русский язык данного международного стандарта. | ||
Библиография
IEC 60335-1:2006, Safety of household and similar electrical appliances - Safety - Part 1: General requirements |
IEC 60335-1:2010/AMD2:2016 |
IEC 60335-2-2:2019, Household and similar electrical appliances - Safety - Part 2-2: Particular requirements for vacuum cleaners and water-suction cleaning appliances |
ISO 679:2009, Cement - Test methods - Determination of strength |
ASTM F2607-08:2014, Standard test method for measuring the hard surface floor-cleaning ability of household/commercial vacuum cleaners |
THRUN, S., BURGARD, W., and FOX, D. Probabilistic Robotics. MIT Press, Cambridge, MA, 2005 |
УДК 64.06:621.865.8:007.52:006.86:006.354 | ОКС 97.080 |
Ключевые слова: роботы, робототехнические устройства, роботы-пылесосы, рабочие характеристики, методы измерения, сервисные роботы, мобильные роботы, методы испытаний | |
Электронный текст документа
и сверен по:
, 2021
{kind=link}