ФЕДЕРАЛЬНОЕ АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ

НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ГОСТР
70893—
2023
Тренажерные устройства имитации полета
ТРЕНАЖЕРНЫЕ УСТРОЙСТВА ИМИТАЦИИ ПОЛЕТА ВЕРТОЛЕТА
Методы оценки соответствия
Издание официальное
Москва
Российский институт стандартизации
2023
ГОСТ Р 70893—2023
Предисловие
1 РАЗРАБОТАН Федеральным автономным учреждением «Центральный аэрогидродинамический институт имени профессора Н.Е. Жуковского» (ФАУ «ЦАГИ»), Союзом авиапроизводителей России
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 323 «Авиационная техника»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 9 ноября 2023 г. № 1366-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
©Оформление. ФГБУ «Институт стандартизации», 2023
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
II
ГОСТ Р 70893—2023
Содержание
1 Область применения..................................................................1
2 Нормативные ссылки..................................................................1
3 Термины, определения и сокращения....................................................2
4 Оценка имитации работы двигателя......................................................2
5 Оценка имитации характеристик динамики полета..........................................4
6 Механические характеристики системы управления........................................23
7 Система подвижности. Вибрации.......................................................40
8 Система визуализации................................................................68
9 Система имитации акустических эффектов...............................................86
10 Системная интеграция. Оценка транспортной задержки..................................100
Библиография.......................................................................102
III
ГОСТ Р 70893—2023
Введение
Настоящий стандарт разработан с учетом и в развитие Федеральных авиационных правил (см. [1] и [2]).
IV
ГОСТ Р 70893—2023
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Тренажерные устройства имитации полета ТРЕНАЖЕРНЫЕ УСТРОЙСТВА ИМИТАЦИИ ПОЛЕТА ВЕРТОЛЕТА Методы оценки соответствия
Flight simulation training devices. Helicopter flight simulation devices. Conformity assessment methods
Дата введения — 2024—01—01
1 Область применения
1.1 Настоящий стандарт устанавливает требования к методам оценки соответствия тренажеров вертолета требованиям Федеральных авиационных правил [2].
1.2 Настоящий стандарт предназначен для обеспечения процедуры допуска к применению тренажерных устройств имитации полета [1] и предназначен для применения при проведении испытаний авиационных тренажеров вертолетов, их систем, программного и аппаратного обеспечения, а также при проведении модернизации действующих авиационных тренажеров и экспертизы проектов перспективных авиационных тренажеров.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ 22448 Системы управления полетом самолета (вертолета). Термины и определения
ГОСТ 22837 Оборудование самолетов и вертолетов пилотажно-навигационное бортовое. Термины и определения
ГОСТ Р 12.4.211 Система стандартов безопасности труда. Средства индивидуальной защиты органа слуха. Противошумы. Субъективный метод измерения поглощения шума
ГОСТ Р 57259 Тренажеры авиационные. Термины и определения
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя «Национальные стандарты» за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
Издание официальное
1
ГОСТ Р 70893—2023
3 Термины, определения и сокращения
3.1 Термины и определения
В настоящем стандарте применены термины по ГОСТ 22448, ГОСТ 22837, ГОСТ Р 57259, ГОСТ Р 12.4.211.
3.2 Сокращения
В настоящем стандарте применены следующие сокращения:
АТр — авиационный тренажер;
ВПП — взлетно-посадочная полоса;
ВС — воздушное судно;
ЗОС — заявление о соответствии;
ИнЛС — индикация на лобовом стекле;
КВС — командир воздушного судна;
НВ — несущий винт;
ОНВ — очки ночного видения;
РЛЭ — руководство по летной эксплуатации;
РСНВ — режим самовращения несущего винта;
РЦШ — рычаг управления циклическим шагом;
EFVS — система технического зрения с расширенными возможностями визуализации (enhanced flight vision system);
GPS — глобальная система определения местоположения(д1оЬа1 positioning system);
QTG — акт (протокол) квалификационных испытаний (qualification test guide);
SPL — уровень звукового давления (sound pressure level);
SPL RMS — среднеквадратическое значение уровня звукового давления (sound pressure level root mean square).
4 Оценка имитации работы двигателя
4.1 Запуск двигателя(ей) (неустановившийся режим)
4.1.1 Цель: Оценка параметров двигателя тренажера вертолета с момента запуска до выхода на установившийся режим малого газа.
4.1.2 Условия полета: На земле.
4.1.3 Выполнение: Запуск двигателя. Для многодвигательного вертолета выполняют испытания для раздельного и для последовательного запуска двигателей. Допуски, установленные на контролируемые параметры,приведены в таблице 1.
4.1.4 Минимальный перечень регистрируемых параметров:
- время от нажатия кнопки запуска до начала раскрутки ротора двигателя;
- частота вращения турбокомпрессора;
- крутящий момент;
- частота вращения свободной турбины;
- частота вращения НВ;
- частота вращения двигателя;
- температура газов перед турбиной;
- общий шаг НВ.
2
ГОСТ Р 70893—2023
Таблица 1—Допуски на параметры
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Время от нажатия кнопки запуска до начала раскрутки ротора двигателя | ±10 % или ±1 с |
Крутящий момент | ±5 % | |
Частота вращения НВ | ±3% | |
Частота вращения турбокомпрессора | ±5% | |
Частота вращения свободной турбины | ±5% | |
Температура газов перед турбиной | ±30°С | |
I-II и уровни R и G | Оценки не проводят | |
Примечание — Если имитируемый вертолет и АТр оборудованы ручкой тормоза НВ, испытание выполняют при включенном и выключенном тормозе НВ.
Приведенные значения допусков должны применяться только в пределах рабочих диапазонов датчиков измерения параметров двигателя.
4.2 Установившийся режим малого газа и режим с номинальной частотой вращения НВ
4.2.1 Цель: Оценка параметров двигателя тренажера вертолета на режиме малого газа и режиме с номинальной частотой вращения НВ.
4.2.2 Условия полета: На земле.
4.2.3 Выполнение: Двигатель(-и) работает на малом газе. Допуски установленные на контролируемые параметры приведены в таблице 2.
4.2.4 Минимальный перечень регистрируемых параметров:
- крутящий момент;
- температура газов перед турбиной;
- частота вращения НВ;
- частота вращения двигателя;
- частота вращения турбокомпрессора;
- общий шаг НВ.
Таблица 2 — Допуски при установившемся режиме малого газа и режиме с номинальной частотой вращения НВ
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Время от нажатия кнопки запуска до начала раскрутки ротора двигателя | ±10 % или ±1 с |
Крутящий момент | ±5% | |
Частота вращения НВ | ±3% | |
Частота вращения турбокомпрессора | ±5% | |
Частота вращения свободной турбины | ±5% | |
Температура газов перед турбиной | ±30°С | |
I-II и уровни R и G | Оценки не проводят | |
Примечание — Если имитируемый вертолет и АТр оборудованы ручкой тормоза НВ, испытание выполняют при включенном и выключенном тормозе НВ.
Приведенные значения допусков должны применяться только в пределах рабочих диапазонов датчиков измерения параметров двигателя.
3
ГОСТ Р 70893—2023
4.3 Регулировка частоты вращения свободной турбины
4.3.1 Цель: Оценка параметров двигателя тренажера вертолета при изменении частоты вращения свободной турбины.
4.3.2 Условия полета: На земле.
4.3.3 Выполнение: Двигатель(-и) работает на малом газе. С помощью перенастройки оборотов свободной турбины двигателя следует изменить частоту вращения свободной турбины от минимального до максимального значений и обратно до минимального. Допуски, установленные на контролируемые параметры,приведены в таблице 3.
4.3.4 Минимальный перечень регистрируемых параметров:
- частота вращения НВ;
- частота вращения двигателя;
- общий шаг НВ;
- частота вращения турбокомпрессора.
Таблица 3 — Допуски при регулировании частоты вращения свободной турбины
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Изменение частоты вращения свободной турбины или частота вращения НВ | ±10 % ±1,5 % |
I-II и уровни R и G | Оценки не проводят | |
4.4 Регулирование частоты вращения двигателя и НВ
4.4.1 Цель: Оценка параметров двигателя тренажера вертолета при изменении общего шага НВ.
4.4.2 Условия полета: Набор высоты и снижение.
4.4.3 Выполнение: Требуется 2 испытания:
- одно испытание, демонстрирующее увеличение общего шага;
- одно испытание, демонстрирующее уменьшение общего шага.
Допуски, установленные на контролируемые параметры, приведены в таблице 4.
4.4.4 Минимальный перечень регистрируемых параметров:
- частота вращения НВ;
- частота вращения двигателя;
- общий шаг НВ;
- частота вращения турбокомпрессора;
- крутящий момент.
Таблица 4 — Допуски при регулировании частоты вращения двигателя и НВ
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Крутящий момент | ±5% |
Частота вращения НВ | ±1,5% | |
I-II и уровни R и G | Оценки не проводят | |
5 Оценка имитации характеристик динамики полета
5.1 Изменение угловой скорости разворота в зависимости от перемещения педалей или угла поворота носового колеса
5.1.1 Цель: Оценка параметров движения тренажера вертолета во время руления по земле для проверки реакции тренажера на управляющие воздействия в обоих направлениях.
5.1.2 Условия полета: На земле.
5.1.3 Выполнение: Убеждение, что на пути движения отсутствуют какие-либо препятствия.
4
ГОСТ Р 70893—2023
Необходимо убедиться в отсутствии выраженного неестественного момента перехода от неподвижного состояния к началу движения, далее ввести коррекцию в крайнее правое положение, установить частоту вращения НВ согласно РЛЭ, увеличить общий шаг. Отклонением педалей путевого управления нужно последовательно выполнить развороты вертолета при различных углах поворота носового колеса. Угол поворота должен увеличиваться медленно, затем удерживаться постоянным в каждом положении до достижения постоянной угловой скорости разворота. Не следует использовать колесные тормоза.
Необходимо убедиться, что указатель поворота правильно реагирует на повороты вертолета (при правом повороте стрелка отклоняется вправо, при левом — влево), а указатели курса индицируют разворот.
Допуски, установленные на контролируемые параметры, приведены в таблице 5.
5.1.4 Минимальный перечень регистрируемых параметров:
- путевая скорость;
- угловая скорость разворота;
- курсовой угол;
- угол поворота носовой стойки;
- другие углы разворота шасси (если применимо);
- общий шаг НВ;
- продольное отклонение РЦШ;
- положение педалей путевого управления;
- поперечное отклонение РЦШ;
- скорость и направление ветра.
Таблица 5 — Допуски при изменении угловой скорости разворота
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Угловая скорость разворота | ±10 % или ±2 град/с |
I-II и уровни R и G | Оценки не проводят | |
5.2 Руление
5.2.1 Цель: Оценка параметров движения тренажера вертолета во время руления по земле для характерных значений путевой скорости, барометрической высоты и в соответствии с направлением движения.
5.2.2 Условия полета: На земле.
5.2.3 Выполнение: Убеждение, что на пути руления отсутствуют какие-либо препятствия.
Необходимо убедиться в отсутствии выраженного неестественного момента перехода от неподвижного состояния к началу движения, далее ввести коррекцию в крайнее правое положение, установить частоту вращения НВ согласно РЛЭ, увеличить общий шаг. Плавно отклоняя рычаг управления от себя, следует перейти к поступательному движению. Регулировать скорость руления после страгива-ния с места нужно рычагом управления, рычагом общего шага и тормозами колес.
Необходимо убедиться, что указатель поворота правильно реагирует на повороты вертолета (при правом повороте стрелка отклоняется вправо, при левом — влево), а указатели курса индицируют разворот. Скорость руления зависит от состояния грунта, направления ветра и препятствий, соответствующее предельное значение указано в РЛЭ.
Чтобы остановить вертолет в процессе руления, необходимо уменьшить мощность двигателей до минимальной, плавно взять рычаг управления на себя до положения, близкого к нейтральному, и использовать тормоза.
Допуски, установленные на контролируемые параметры, приведены в таблице 6.
5.2.4 Минимальный перечень регистрируемых параметров:
- путевая скорость;
- барометрическая высота;
- курсовой угол;
- общий шаг НВ;
- крутящий момент;
5
ГОСТ Р 70893—2023
- положение педалей путевого управления;
- продольное отклонение РЦШ;
- скорость и направление ветра;
- поперечное отклонение РЦШ;
- путевая скорость;
- барометрическая высота.
Таблица 6 — Допуски при рулении
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Крутящий момент | ±3% |
Продольное отклонение РЦШ | ±5% | |
Поперечное отклонение РЦШ | ±5% | |
Положение педалей путевого управления | ±5% | |
Общий шаг НВ | ±5% | |
I-II и уровни R и G | Оценки не проводят | |
5.3 Взлет со всеми работающими двигателями
5.3.1 Цель: Оценка параметров движения тренажера вертолета при выполнении взлета с разгоном в зоне влияния земной поверхности со всеми работающими двигателями.
5.3.2 Условия полета: Висение.
5.3.3 Выполнение: Вертикальный отрыв от земли и зависание на высоте 1м (с уточнением в РЛЭ имитируемого вертолета). Отклонением рычага управления от себя создание угла тангажа на пикирование 5—6 градусов и перевод вертолета в разгон скорости. Одновременно с этим плавное увеличение общего шага НВ. Выдерживание угла тангажа до достижения скорости и высоты минимум 60 м над уровнем земли.
Допуски, установленные на контролируемые параметры, приведены в таблице 7.
5.3.4 Минимальный перечень регистрируемых параметров:
- путевая скорость;
- барометрическая высота;
- курсовой угол;
- общий шаг НВ;
- крутящий момент;
- положение педалей путевого управления;
- продольное отклонение РЦШ;
- скорость и направление ветра;
- поперечное отклонение РЦШ;
- путевая скорость;
- барометрическая высота.
Таблица 7 — Допуски при взлете со всеми работающими двигателями
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Воздушная скорость | ±5,6 км/ч (±3 уз) |
Высота | ±6,1 м | |
Крутящий момент | ±3% | |
Частота вращения НВ | ±1,5 % | |
Угол тангажа | ±1,5° | |
Угол крена | ±2° |
6
Окончание таблицы 7
ГОСТ Р 70893—2023
Типы АТр | Параметр | Величина допуска |
II-V и уровень S | Курсовой угол | +2° |
Продольное отклонение РЦШ | ±10 % | |
Поперечное отклонение РЦШ | ±10 % | |
Положение педалей путевого управления | ±10 % | |
Общий шаг НВ | ±10 % | |
I-II и уровень R | Воздушная скорость | ±5,6 км/ч (±3 уз) |
Высота | ±6,1 м | |
Крутящий момент | ±3% | |
Частота вращения НВ | ±1,5 % | |
Угол тангажа | ±2,5° | |
Угол крена | ±2° | |
Курсовой угол | ±2° | |
Уровень G | Оценки не проводят | |
5.4 Продолженный взлет при отказе одного двигателя
5.4.1 Цель: Оценка параметров движения тренажера вертолета при выполнении взлета при отказе одного двигателя.
5.4.2 Условия полета: Висение.
5.4.3 Выполнение: Для выполнения продолженного взлета при отказе одного двигателя после критической точки необходимо уменьшить общий шаг для сохранения оборотов НВ и одновременно начать разгон путем энергичного отклонения рычага управления от себя. При достижении угла тангажа 15—20° и скорости 45—50 км/ч следует уменьшить угол тангажа на 5—10°. Соответствующие значения нужно уточнить в РЛЭ имитируемого вертолета. На скорости 60—65 км/ч следует перевести вертолет в набор высоты с вертикальной скоростью 0,5 м/с и разогнать до значения наивыгоднейшей скорости, далее набрать высоту и продолжить полет с одним работающим двигателем.
Допуски, установленные на контролируемые параметры, приведены в таблице 8.
5.4.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- скороподъемность;
- угол тангажа;
- угол крена;
- курсовой угол;
- крутящий момент;
- частота вращения НВ;
- общий шаг НВ;
- продольное отклонение РЦШ;
- положение педалей путевого управления;
- поперечное отклонение РЦШ;
- скорость и направление ветра.
7
ГОСТ Р 70893—2023
Таблица 8 — Допуски при продолженном взлете при отказе одного двигателя
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Воздушная скорость | ±5,6 км/ч (±3 уз) |
Высота | ±6,1 м | |
Крутящий момент | ±3 % | |
Частота вращения НВ | ±1,5 % | |
Угол тангажа | ±1,5° | |
Угол крена | ±2° | |
Курсовой угол | ±2° | |
Продольное отклонение РЦШ | ±10 % | |
Поперечное отклонение РЦШ | ±10 % | |
Положение педалей путевого управления | ±10 % | |
Общий шаг НВ | ±10 % | |
I-II и уровень R | Воздушная скорость | ±5,6 км/ч (±3 уз) |
Высота | ±6,1 м | |
Крутящий момент | ±3% | |
Частота вращения НВ | ±1,5 % | |
Угол тангажа | ±2,5° | |
Угол крена | ±2° | |
Курсовой угол | ±2° | |
Уровень G | Оценки не проводят | |
Примечание — Данное испытание соответствует открытой зоне категории А: выполнение взлета при отказе одного двигателя после точки принятия решения о взлете.
5.5 Прерванный взлет при отказе одного двигателя
5.5.1 Цель: Оценка параметров движения тренажера вертолета при выполнении прерванного взлета.
5.5.2 Условия полета: Висение.
5.5.3 Выполнение: В случае отказа одного двигателя на взлете до достижения критической точки необходимо выполнить посадку. Для этого нужно энергично уменьшить общий шаг до 6—7°. После начала снижения плавным увеличением шага следует поддерживать частоту вращения НВ. На высоте нужно выполнить «подрыв» (резко увеличить) общего шага, заем выполнить посадку. Значения соответствующих параметров необходимо уточнить в РЛЭ имитируемого вертолета.
Допуски, установленные на контролируемые параметры, приведены в таблице 9.
5.5.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- взлетная дистанция;
- угол тангажа;
- угол крена;
- курсовой угол;
- крутящий момент;
- частота вращения НВ;
- общий шаг НВ;
8
ГОСТ Р 70893—2023
- продольное отклонение РЦШ;
- положение педалей путевого управления;
- поперечное отклонение РЦШ;
- скорость и направление ветра.
Таблица 9 — Допуски при прерванном взлете при отказе одного двигателя
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Воздушная скорость | ±5,6 км/ч (±3 уз) |
Высота | ±6,1 м | |
Крутящий момент | ±3% | |
Частота вращения НВ | ±1,5 % | |
Угол тангажа | ±1,5° | |
Угол крена | ±2° | |
Курсовой угол | ±2° | |
Продольное отклонение РЦШ | ±10% | |
Поперечное отклонение РЦШ | ±10% | |
Положение педалей путевого управления | ±10% | |
Общий шаг НВ | ±10% | |
Взлетная дистанция | ±7,5 % или ±30 м | |
I-II и уровень R | Воздушная скорость | ±5,6 км/ч (±3 уз) |
Высота | ±6,1 м | |
Крутящий момент | ±3% | |
Частота вращения НВ | ±1,5% | |
Угол тангажа | ±2,5° | |
Угол крена | ±2° | |
Курсовой угол | ±2° | |
Взлетная дистанция | ±7,5 % или ±30 м | |
Уровень G | Оценки не проводят | |
Примечание — Данное испытание соответствует открытой зоне категории А: выполнение взлета при отказе одного двигателя после точки принятия решения о взлете.
5.6 Отрыв от земли и переход в режим висения
5.6.1 Цель: Оценка параметров движения тренажера вертолета при выполнении взлета, начиная с работы на земле с рычагом общего шага на нижнем упоре до установившегося висения в зоне влияния земной поверхности.
5.6.2 Условия полета: На земле, с включенной или выключенной системой обеспечения устойчивости.
5.6.3 Выполнение: Необходимо установить частоту вращения НВ, плавным движением рычага «шаг-газ» выполнить отрыв вертолета от земли и набрать заданную высоту висения. Следует удерживать вертолет от разворотов и кренов, не допуская падения частоты вращения НВ. Значения соответствующих параметров необходимо уточнить в РЛЭ имитируемого вертолета.
Допуски, установленные на контролируемые параметры, приведены в таблице 10.
9
ГОСТ Р 70893—2023
5.6.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- взлетная дистанция;
- угол тангажа;
- угол крена;
- курсовой угол;
- крутящий момент;
- частота вращения НВ;
- общий шаг НВ;
- продольное отклонение РЦШ;
- положение педалей путевого управления;
- поперечное отклонение РЦШ;
- скорость и направление ветра.
Таблица 10 — Допуски при отрыве от земли и переходе в режим висения
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Крутящий момент | ±5 % |
Угол тангажа | ±2° | |
Угол крена | ±2° | |
Курсовой угол | ±2° | |
Продольное отклонение РЦШ | ±10 % | |
Поперечное отклонение РЦШ | ±10 % | |
Положение педалей путевого управления | ±10 % | |
Общий шаг НВ | ±10 % | |
I-II и уровни R и G | Оценки не проводят | |
5.7 Режим висения
5.7.1 Цель: Оценка параметров движения тренажера вертолета на режиме висения в/вне зоне(ы) влияния земной поверхности.
5.7.2 Условия полета: В зоне влияния земной поверхности. Вне зоны влияния земной поверхности. С включенной и выключенной системой обеспечения устойчивости.
5.7.3 Выполнение: Для выполнения вертикального взлета и висения необходимо:
- установить рукоятку коррекции в крайнее правое положение;
- развернуть вертолет против ветра;
- плавным движением рычага «шаг-газ» вверх отделить вертолет от земли и набрать заданную высоту висения, удерживая вертолет от разворотов и кренов, не допуская падения частоты вращения НВ ниже установленного в РЛЭ значения. Необходимо помнить, что достижение взлетной мощности двигателями определяется уменьшением частоты вращения НВ на несколько процентов при взятии рычага «шаг-газ» вверх и частотой вращения турбокомпрессоров двигателей, соответствующей взлетному режиму при данной температуре окружающего воздуха.
Если при отрыве от земли вертолет имеет стремление к смещению вперед и влево, это смещение необходимо парировать соответствующими отклонениями рычагов управления, а возникающие при этом небольшие усилия на рычагах управления снять частыми короткими нажатиями на кнопку триммера.
Допуски, установленные на контролируемые параметры, приведены в таблице 11.
5.7.4 Минимальный перечень регистрируемых параметров:
- вертикальная скорость;
- барометрическая высота;
- угол бокового скольжения;
10
ГОСТ Р 70893—2023
- угол тангажа;
- угол крена;
- курсовой угол;
- крутящий момент;
- частота вращения НВ;
- общий шаг НВ;
- продольное отклонение РЦШ;
- положение педалей путевого управления;
- поперечное отклонение РЦШ;
- скорость и направление ветра.
Таблица 11 — Допуски при режиме висения
Типы АТр | Параметр | Величина допуска |
I-V и уровни S и R | Крутящий момент | +3% |
Угол тангажа | ±1,5° | |
Угол крена | +1,5° | |
Продольное отклонение РЦШ | ±5% | |
Поперечное отклонение РЦШ | ±5 % | |
Положение педалей путевого управления | ±5% | |
Общий шаг НВ | ±5 % | |
Уровень G | Крутящий момент | ±3% |
Общий шаг НВ | ±5% |
Испытания проводят для 4 режимов:
10 %, 30 % и 70 % высоты от диаметра НВ при наличии влияния земной поверхности; Более 150 % высоты от диаметра НВ вне зоны влияния земной поверхности.
5.8 Вертикальный набор высоты
5.8.1 Цель: Определение балансировочных характеристик тренажера вертолета на режиме вертикального набора высоты с облегченной и максимальной взлетными массами.
5.8.2 Условия полета: Вне зоны влияния земной поверхности, с включенной и выключенной системой обеспечения устойчивости.
5.8.3 Выполнение: Перевод вертолета в режим установившегося вертикального набора высоты на взлетном режиме работы двигателей (значение частоты вращения указано в РЛЭ). Выдерживание режима не менее 20 с.
Допуски, установленные на контролируемые параметры, приведены в таблице 12.
5.8.4 Минимальный перечень регистрируемых параметров:
- Вертикальная скорость;
- Барометрическая высота;
- Угол тангажа;
- Курсовой угол;
- Угол крена;
- Частота вращения НВ;
- Крутящий момент;
- Продольное отклонение РЦШ;
- Общий шаг НВ;
- Поперечное отклонение РЦШ;
- Положение педалей путевого управления;
- Скорость и направление ветра.
11
ГОСТ Р 70893—2023
Таблица 12 — Допуски при вертикальном наборе высоты
Типы АТр | Параметр | Величина допуска |
I-V и уровни S и R | Вертикальная скорость | ±0,5 м/с или ±10 % |
Положение педалей путевого управления | ±5 % | |
Общий шаг НВ | ±5 % | |
Уровень G | Оценки не проводят | |
Примечание — Испытания проводят для 4 режимов. Могут быть представлены векторы мгновенного состояния.
5.9 Горизонтальный полет. Летно-технические характеристики и балансировочные положения рычагов управления полетом
5.9.1 Цель: Определение балансировочных характеристик тренажера вертолета в горизонтальном прямолинейном полете.
5.9.2 Условия полета: Установившийся крейсерский режим полета, с включенной или выключенной системой обеспечения устойчивости.
5.9.3 Выполнение: Горизонтальный прямолинейный полет при отсутствии бокового скольжения. Выдерживание режима не менее 20 с.
Допуски, установленные на контролируемые параметры, приведены в таблице 13.
5.9.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- угол тангажа;
- угол крена;
- угол бокового скольжения;
- крутящий момент;
- общий шаг НВ;
- продольное отклонение РЦШ;
- положение педалей путевого управления;
- поперечное отклонение РЦШ;
- скорость и направление ветра;
Таблица 13 — Допуски при горизонтальном полете
Типы АТр | Параметр | Величина допуска |
I-V и уровни S, R, G | Крутящий момент | ±3 % |
Угол тангажа | ±1,5° | |
Угол бокового скольжения | ±2° | |
Продольное отклонение РЦШ | ±5 % | |
Поперечное отклонение РЦШ | ±5% | |
Положение педалей путевого управления | ±5 % | |
Общий шаг НВ | ±5% |
Примечание — Испытания проводят для двух комбинаций полетной массы и центровки. Для каждой комбинации необходимо несколько значений скоростей от выгоднейшей до максимально допустимой скорости в диапазоне режимов полета. Могут быть представлены векторы мгновенного состояния.
12
ГОСТ Р 70893—2023
5.10 Набор высоты. Летно-технические характеристики и балансировочные положения рычагов управления полетом
5.10.1 Цель: Определение балансировочных характеристик тренажера вертолета в режиме набора высоты на выгоднейшей скорости со всеми работающими двигателями и с одним неработающим двигателем.
5.10.2 Условия полета: Все двигатели работают. Один двигатель не работает. Система обеспечения устойчивости включена или выключена. Система обеспечения устойчивости включена и выключена.
5.10.3 Выполнение: Перевод вертолета в режим установившегося набора высоты без скольжения. Выдержка режима в течение 20 с. Допуски, установленные на контролируемые параметры, приведены в таблице 14.
5.10.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- вертикальная скорость;
- угол тангажа;
- барометрическая высота;
- угол бокового скольжения;
- угол крена;
- общий шаг НВ;
- частота вращения НВ;
- положение педалей путевого управления;
- продольное отклонение РЦШ;
- поперечное отклонение РЦШ;
- скорость и направление ветра.
Таблица 14 — Допуски при наборе высоты
Типы АТр | Параметр | Величина допуска |
I-V и уровни S, R, G | Вертикальная скорость | ±0,5 м/с или ±10 % |
Воздушная скорость | ±5,6 км/ч (±3 уз) | |
Угол тангажа | ±1,5° | |
Угол бокового скольжения | ±2° | |
Продольное отклонение РЦШ | +5% | |
Поперечное отклонение РЦШ | ±5% | |
Положение педалей путевого управления | ±5% | |
Общий шаг НВ | ±5% |
Примечание — Испытания проводят для двух комбинаций полетной массы и центровки. Могут быть представлены векторы мгновенного состояния.
5.11 Снижение. Летно-технические характеристики и балансировочные положения рычагов управления
5.11.1 Цель: Определение характеристик тренажера вертолета в режиме снижения. Во время испытания необходимо продемонстрировать значительную скорость при нормальной скорости захода на посадку.
5.11.2 Условия полета: Снижение с работающим двигателем, с включенной или выключенной системой обеспечения устойчивости.
5.11.3 Выполнение: Для выполнения снижения с работающими двигателями необходимо:
- установить заданную скорость снижения;
- установить общий шаг НВ соответственно заданной вертикальной скорости снижения.
13
ГОСТ Р 70893—2023
Рекомендуемая скорость снижения на высотах менее 2 000 м составляет 120—180 км/ч по прибору, вертикальная скорость снижения 3—5 м/с.
При уменьшении общего шага с одновременным гашением поступательной скорости следует обращать особое внимание на выдерживание частоты вращения НВ в рабочем диапазоне.
Если скорость снижения самопроизвольно увеличивается, необходимо уменьшить ее плавным увеличением общего шага НВ. Если при этом запас мощности окажется недостаточным, необходимо перейти на полет с поступательной скоростью.
Вертикальное снижение с высоты 10 м до земли выполняют постепенным уменьшением вертикальной скорости снижения с таким расчетом, чтобы к моменту приземления она была не более 0,1 м/с. Допуски, установленные на контролируемые параметры, приведены в таблице 15. Значения соответствующих параметров необходимо уточнить в РЛЭ имитируемого вертолета.
5.11.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- угол тангажа;
- угол крена;
- угол бокового скольжения;
- крутящий момент;
- общий шаг НВ;
- частота вращения НВ;
- положение педалей путевого управления;
- продольное отклонение РЦШ;
- поперечное отклонение РЦШ;
- скорость и направление ветра.
Таблица 15 — Допуски при снижении
Типы АТр | Параметр | Величина допуска |
I-V и уровни S, R, G | Крутящий момент | ±3% |
Воздушная скорость | ±5,6 км/ч (±3 уз) | |
Угол тангажа | ±1,5° | |
Угол бокового скольжения | ±2° | |
Продольное отклонение РЦШ | ±5% | |
Поперечное отклонение РЦШ | ±5 % | |
Положение педалей путевого управления | ±5 % | |
Общий шаг НВ | ±5% |
Примечание — Могут быть представлены векторы мгновенного состояния. Испытание проводят для двух комбинаций полетной массы и центровки.
5.12 Летно-технические характеристики авторотации и балансировочные положения рычагов управления полетом
5.12.1 Цель: Определение характеристик тренажера вертолета на авторотации (в режиме самовращения несущего винта (РСНВ)).
5.12.2 Условия полета: Установившееся снижение, с включенной или выключенной системой обеспечения устойчивости, с включенной и выключенной системой обеспечения устойчивости.
5.12.3 Выполнение: При переходе на РСНВ необходимо:
- установить необходимую скорость горизонтального полета;
- уменьшить общий шаг НВ до минимального значения;
- после перехода на режим самовращения частоту вращения НВ сохранять в заданных пределах изменением положения рычага «шаг-газ». Рекомендуемая частота вращения НВ указана в РЛЭ;
14
ГОСТ Р 70893—2023
- парировать соответствующими отклонениями рычагов управления стремление вертолета развернуться вправо и опустить носовую часть.
Допуски, установленные на контролируемые параметры, приведены в таблице 16.
5.12.4 Минимальный перечень регистрируемых параметров:
- вертикальная скорость;
- барометрическая высота;
- угол тангажа;
- угол крена;
- угол бокового скольжения;
- крутящий момент;
- общий шаг НВ;
- частота вращения НВ;
- положение педалей путевого управления;
- продольное отклонение РЦШ;
- поперечное отклонение РЦШ;
- скорость и направление ветра.
Таблица 16 — Допуски на авторотацию и балансировочные положения рычагов управления полетом
Типы АТр | Параметр | Величина допуска |
I-V и уровни S, R, G | Вертикальная скорость | ±0,5 м/с или ±10 % |
Частота вращения НВ | ±1,5% | |
Угол тангажа | ±1,5° | |
Угол бокового скольжения | ±2° | |
Продольное отклонение РЦШ | ±5% | |
Поперечное отклонение РЦШ | ±5% | |
Положение педалей путевого управления | ±5 % | |
Общий шаг НВ | ±5% |
Примечание — Могут быть представлены векторы мгновенного состояния.
Испытание проводят для двух комбинаций полетной массы и центровки.
Допуск на частоту вращения НВ используется только в том случае, если рычаг общего шага полностью опущен (находится на нижнем упоре).
Скорость варьируется от минимального значения вертикальной скорости снижения до, как минимум, скорости наибольшей дальности или до максимально разрешенной скорости полета с неработающим двигателем.
5.13 Вход в режим авторотации (РСНВ)
5.13.1 Цель: Оценка параметров движения тренажера вертолета при быстром уменьшении мощности двигателя вплоть до полетного малого газа.
5.13.2 Условия полета: Крейсерский режим полета и набор высоты, с включенной и выключенной системой обеспечения устойчивости.
5.13.3 Выполнение: Перевод вертолета в установившийся набор высоты с вертикальной скоростью, выдерживание режима в течение 10 с; перевод вертолета в режим авторотации (РСНВ), выдерживая при этом курс. Выполнение установившегося снижения в режиме авторотации в течение не менее 5 с. Допуски, установленные на контролируемые параметры, приведены таблице 17. Значения соответствующих параметров полета необходимо уточнить в РЛЭ имитируемого вертолета.
5.13.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- вертикальная скорость;
- угол тангажа;
- барометрическая высота;
15
ГОСТ Р 70893—2023
- угол бокового скольжения;
- угол крена;
- курсовой угол;
- крутящий момент;
- общий шаг НВ;
- частота вращения НВ;
- положение педалей путевого управления;
- продольное отклонение РЦШ;
- поперечное отклонение РЦШ;
- скорость и направление ветра.
Таблица 17 — Допуски при входе в режим авторотации
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Воздушная скорость | ±9,3 км/ч (±5 уз) |
Высота | ±6,1 м | |
Крутящий момент | ±3% | |
Частота вращения НВ | ±3% | |
Угол тангажа | ±2° | |
Угол крена | ±3° | |
Курсовой угол | ±5° | |
Продольное отклонение РЦШ | ±10 % | |
Поперечное отклонение РЦШ | ±10 % | |
Положение педалей путевого управления | ±10 % | |
Общий шаг НВ | ±10 % | |
I-II и уровень R | Воздушная скорость | ±9,3 км/ч (±5 уз) |
Высота | ±6,1 м | |
Крутящий момент | ±3% | |
Частота вращения НВ | ±3% | |
Угол тангажа | ±2° | |
Угол крена | ±3° | |
Курсовой угол | ±5° | |
Уровень G | Оценки не проводят | |
Необходимо фиксировать изменения параметров по времени от момента резкого уменьшения мощности двигателей до малого газа и вплоть до достижения установившихся значений скорости снижения на РСНВ и частоты вращения НВ.
Для режима горизонтального полета должны быть получены данные по всему диапазону допустимых скоростей полета, а для режима набора высоты — для скорости максимальной скороподъемности при максимальной мощности двигателей или вблизи этого значения.
5.14 Посадка со всеми работающими двигателями
5.14.1 Цель: Оценка параметров движения тренажера вертолета при выполнении схемы захода на посадку и посадки до режима висения в зоне влияния земной поверхности.
5.14.2 Условия полета: Заход на посадку до режима висения, с включенной и выключенной системой обеспечения устойчивости.
16
ГОСТ Р 70893—2023
5.14.3 Выполнение: Уменьшение вертикальной и поступательной скоростей полета на высоте 40—50 м относительно места приземления. Плавное увеличение общего шага, не допуская падения частоты вращения Н, чтобы на скорости менее 40 км/ч по прибору вертикальная скорость снижения составляла не более 1,5—2 м/с. С высоты 10 м плавным перемещением органов управления окончательное погашение поступательной и вертикальной скорости вертолета с расчетом, чтобы провести зависание в зоне влияния воздушной подушки. Допуски, установленные на контролируемые параметры, приведены в таблице 18. Значения соответствующих параметров полета необходимо уточнить в РЛЭ имитируемого вертолета.
5.14.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- вертикальная скорость;
- угол тангажа;
- барометрическая высота;
- угол бокового скольжения;
- угол крена;
- курсовой угол;
- крутящий момент;
- общий шаг НВ;
- частота вращения НВ;
- положение педалей путевого управления;
- продольное отклонение РЦШ;
- поперечное отклонение РЦШ;
- скорость и направление ветра.
Таблица 18 — Допуски при посадке со всеми работающими двигателями
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Воздушная скорость | ±9,3 км/ч (±5 уз) |
Высота | ±6,1 м | |
Крутящий момент | ±3% | |
Частота вращения НВ | ±3% | |
Угол тангажа | ±2° | |
Угол крена | ±3° | |
Курсовой угол | ±5° | |
Продольное отклонение РЦШ | ±10% | |
Поперечное отклонение РЦШ | ±10% | |
Положение педалей путевого управления | ±10% | |
Общий шаг НВ | ±10% | |
I-II и уровень R | Воздушная скорость | ±9,3 км/ч (±5 уз) |
Высота | ±6,1 м | |
Крутящий момент | ±3% | |
Частота вращения НВ | ±3% | |
Угол тангажа | ±2° | |
Угол крена | ±3° | |
Курсовой угол | ±5° | |
Уровень G | Оценки не проводят | |
17
ГОСТ Р 70893—2023
5.15 Посадка с одним неработающим двигателем
5.15.1 Цель: Оценка параметров движения тренажера вертолета при выполнении схемы захода на посадку и посадки с одним неработающим двигателем.
5.15.2 Условия полета: Заход на посадку и посадка, с включенной и выключенной системой обеспечения устойчивости.
5.15.3 Выполнение: Снижение на выбранную площадку на скорости 100—120 км/ч, развороты — с углом крена не более 15°. Начиная с высоты 100 м — снижение на скорости 80 км/ч (при ветре у земли не более 5 м/с) или 80—120 км/ч (при ветре более 5 м/с) и с вертикальной скоростью 2—4 м/с.
Уменьшение поступательной и вертикальной скоростей следует начинать с высоты 40—50 м с таким расчетом, чтобы на высоте 10—15 м мощность двигателя была взлетной, а поступательная скорость относительно земли составляла 15—20 км/ч. Необходимо плавно увеличить общий шаг НВ, не допуская падения частоты вращения НВ.
По мере приближения к земле нужно увеличивать шаг более энергично с таким расчетом, чтобы на высоте 0,5—1 м он был близок к максимальному. Вертолет при этом приземляется с небольшими вертикальной и поступательной скоростями. На высоте 5—10 м от земли до колес шасси рычаг циклического шага следует отдать от себя, чтобы придать вертолету необходимый посадочный угол и избежать касания земли хвостовой опорой.
После приземления вертолета, при поднятом вверх рычаге общего шага, для торможения вертолета на пробеге необходимо слегка взять на себя от нейтрального положения рычаг циклического шага, использовать тормоза колес.
После остановки вертолета необходимо установить рычаг циклического шага в нейтральное положение, вывести коррекцию влево с одновременным плавным сбросом общего шага. Допуски, установленные на контролируемые параметры, приведены в таблице 19. Значения соответствующих параметров необходимо уточнить в РЛЭ имитируемого вертолета.
5.15.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- вертикальная скорость;
- угол тангажа;
- барометрическая высота;
- угол бокового скольжения;
- угол крена;
- курсовой угол;
- крутящий момент;
- общий шаг НВ;
- частота вращения НВ;
- положение педалей путевого управления;
- продольное отклонение РЦШ;
- поперечное отклонение РЦШ;
- скорость и направление ветра.
Таблица 19 — Допуски при посадке с одним неработающим двигателем
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Воздушная скорость | ±9,3 км/ч (±5 уз) |
Высота | ±6,1 м | |
Крутящий момент | ±3% | |
Частота вращения НВ | ±3% | |
Угол тангажа | ±2° | |
Угол крена | ±3° | |
Курсовой угол | ±5° | |
Продольное отклонение РЦШ | ±10 % |
18
Окончание таблицы 19
ГОСТ Р 70893—2023
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Поперечное отклонение РЦШ | ±10 % |
Положение педалей путевого управления | ±10 % | |
Общий шаг НВ | ±10 % | |
I-II и уровень R | Воздушная скорость | ±9,3 км/ч (±5 уз) |
Высота | ±6,1 м | |
Крутящий момент | ±3% | |
Частота вращения НВ | ±3% | |
Угол тангажа | ±2° | |
Угол крена | ±3° | |
Курсовой угол | ±5° | |
Уровень G | Оценки не проводят | |
Примечание — Испытание прекращают, когда все опоры шасси находятся на земле.
5.16 Прерванная посадка/уход на второй круг
5.16.1 Цель: Оценка параметров движения тренажера вертолета при выполнении схемы захода на посадку и ухода на второй круг.
5.16.2 Условия полета: Заход на посадку, с включенной и выключенной системой обеспечения устойчивости.
5.16.3 Выполнение: Уменьшение вертикальной и поступательной скоростей полета на высоте 40—50 м относительно места приземления. Плавное увеличение общего шага, не допуская снижения частоты вращения НВ, чтобы на скорости менее 40 км/ч по прибору вертикальная скорость снижения составляла не более 1,5—2 м/с. С высоты 10 м плавным перемещением органов управления окончательное погашение поступательной и вертикальной скорости вертолета с расчетом, чтобы провести зависание в зоне влияния воздушной подушки. Вертикальную скорость снижения необходимо уменьшить по мере приближения к земле с таким расчетом, чтобы к моменту приземления она не превышала значения 0,1—0,2 м/с.
Для ухода на второй круг необходимо увеличить общий шаг НВ, отклонением рычага управления от себя разогнать вертолет до необходимой поступательной скорости и перейти в набор высоты. Допуски, установленные на контролируемые параметры, приведены в таблице 20. Значения соответствующих параметров необходимо уточнить в РЛЭ имитируемого вертолета.
5.16.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- вертикальная скорость;
- угол тангажа;
- барометрическая высота;
- угол бокового скольжения;
- угол крена;
- курсовой угол;
- крутящий момент;
- общий шаг НВ;
- частота вращения НВ;
- положение педалей путевого управления;
- продольное отклонение РЦШ;
- поперечное отклонение РЦШ;
- скорость и направление ветра.
19
ГОСТ Р 70893—2023
Таблица 20 — Допуски при прерванной посадке/уходе на второй круг
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Воздушная скорость | ±5,6 км/ч (±3 уз) |
Высота | ±6,1 м | |
Крутящий момент | ±3% | |
Частота вращения НВ | ±1,5% | |
Угол тангажа | ±1,5° | |
Угол крена | ±2° | |
Курсовой угол | ±2° | |
Продольное отклонение РЦШ | ±10 % | |
Поперечное отклонение РЦШ | ±10 % | |
Положение педалей путевого управления | ±10 % | |
Общий шаг НВ | ±10 % | |
I-II и уровень R | Воздушная скорость | ±5,6 км/ч (±3 уз) |
Высота | ±6,1 м | |
Крутящий момент | ±3% | |
Частота вращения НВ | ±1,5% | |
Угол тангажа | ±2,5° | |
Угол крена | ±2° | |
Курсовой угол | ±2° | |
Уровень G | Оценки не проводят | |
5.17 Посадка на режиме авторотации (РСНВ)
5.17.1 Цель: Оценка изменения по времени параметров полета тренажера вертолета в процессе захода на посадку и посадки с выключенными двигателями на режиме авторотации (РСНВ).
5.17.2 Условия полета: Заход на посадку и касание.
5.17.3 Выполнение: Горизонтальный полет для расчета захода на посадку. Перевод вертолета на режим авторотации (РСНВ). Выдерживание частоты вращения НВ. Выключение двигателей. С высоты -120 м отклонением рычага управления на себя начало постепенного уменьшения поступательной скорости. С высоты -40 м движением рычага «шаг-газ» увеличение шага НВ, чтобы к моменту касания шасси земли шаг НВ был максимальным, а вертикальная скорость была погашена до 0,1—0,2 м/с. На высоте -4 м задание вертолету посадочного угла тангажа. Посадка. Допуски, установленные на контролируемые параметры, приведены в таблице 21. Значения соответствующих параметров необходимо уточнить в РЛЭ имитируемого вертолета.
5.17.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- вертикальная скорость;
- угол тангажа;
- барометрическая высота;
- угол бокового скольжения;
- угол крена;
- курсовой угол;
- крутящий момент;
- общий шаг НВ;
20
ГОСТ Р 70893—2023
- частота вращения НВ;
- положение педалей путевого управления;
- продольное отклонение РЦШ;
- поперечное отклонение РЦШ;
- скорость и направление ветра.
Таблица 21 — Допуски при посадке на режиме авторотации
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Воздушная скорость | ±5,6 км/ч (±3 уз) |
Крутящий момент | ±3% | |
Частота вращения НВ | ±3% | |
Высота | ±6,1 м | |
Угол тангажа | ±2° | |
Угол крена | ±2° | |
Курсовой угол | ±5° | |
Продольное отклонение РЦШ | ±10 % | |
Поперечное отклонение РЦШ | ±10 % | |
Положение педалей путевого управления | ±10% | |
Общий шаг НВ | ±10 % | |
I-II и уровни R и G | Оценки не проводят | |
5.18 Переход от режима висения к снижению до точки приземления
5.18.1 Цель: Оценка параметров движения тренажера вертолета от висения в зоне влияния земной поверхности до касания, завершающегося полностью опущенным положением рычага управления общего шага.
5.18.2 Условия полета: Висение в зоне влияния земной поверхности, с включенной или выключенной системой обеспечения устойчивости, с включенной и выключенной системой обеспечения устойчивости.
5.18.3 Выполнение: Зависание. Вертикальную скорость снижения необходимо уменьшить по мере приближения к земле с таким расчетом, чтобы к моменту приземления она не превышала значения 0,1—0,2 м/с. Перед приземлением не допускать боковые перемещения вертолета. Перед остановкой вертолета у земли необходимо отклонением рычага от себя и вправо парировать стремление вертолета к резкой остановке с поднятием «носа», разворотам и кренению влево. Невыполнение этого требования может привести к движению вертолета назад или грубой посадке. Допуски, установленные на контролируемые параметры, приведены в таблице 22. Значения соответствующих параметров необходимо уточнить в РЛЭ имитируемого вертолета.
5.18.4 Минимальный перечень регистрируемых параметров:
- вертикальная скорость;
- барометрическая высота;
- угол тангажа;
- угол крена;
- угол бокового скольжения;
- крутящий момент;
- курсовой угол;
- частота вращения НВ;
- общий шаг НВ;
- продольное отклонение РЦШ;
- положение педалей путевого управления;
21
ГОСТ Р 70893—2023
- поперечное отклонение РЦШ;
- скорость и направление ветра.
Таблица 22 — Допуски. Переход от режима висения к снижению до точки приземления
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Крутящий момент | ±5 % |
Угол тангажа | ±2° | |
Угол крена | ±2° | |
Курсовой угол | ±3° | |
Продольное отклонение РЦШ | ±10 % | |
Поперечное отклонение РЦШ | ±10 % | |
Положение педалей путевого управления | ±10 % | |
Общий шаг НВ | ±10 % | |
I-II и уровни R и G | Оценки не проводят | |
5.19 Ускорение в режиме горизонтального полета
5.19.1 Цель: Регистрация скоординированного ускорения тренажера вертолета в режиме горизонтального полета, вызванного однократным увеличением мощности в начале выполнения маневра (не непрерывное увеличение).
5.19.2 Условия полета: Крейсерский режим полета, с включенной или выключенной системой обеспечения устойчивости.
5.19.3 Выполнение: В режиме горизонтального полета отклонением рычага управления от себя создание угла тангажа на пикирование 5-6 градусов и перевод вертолета в разгон скорости. Допуски, установленные на контролируемые параметры, приведены в таблице 23.
5.19.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- угол крена;
- угол тангажа;
- курсовой угол;
- крутящий момент;
- общий шаг НВ;
- продольное отклонение РЦШ;
- положение педалей путевого управления;
- поперечное отклонение РЦШ;
- скорость и направление ветра.
Таблица 23 — Допуски при ускорении в режиме горизонтального полета
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Воздушная скорость | ±5,6 км/ч (±3 уз) |
Крутящий момент | ±3% | |
Угол тангажа | ±2° | |
Угол крена | ±2° | |
Курсовой угол | ±2° | |
Продольное отклонение РЦШ | ±10 % | |
Поперечное отклонение РЦШ | ±10 % |
22
Окончание таблицы 23
ГОСТ Р 70893—2023
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Положение педалей путевого управления | ±10 % |
Общий шаг НВ | ±10 % | |
I-II и уровень R | Воздушная скорость | ±5,6 км/ч (±3 уз) |
Крутящий момент | ±3% | |
Угол тангажа | ±2° | |
Угол крена | ±2° | |
Курсовой угол | ±2° | |
Уровень G | Оценки не проводят | |
6 Механические характеристики системы управления
6.1 Управление циклическим шагом
6.1.1 Цель: Показать, что характеристики усилий, а также положения рычага управления циклическим шагом соответствуют характеристикам вертолета.
6.1.2 Условия полета: На земле, с включенным и выключенным триммером, с включенной и выключенной системой обеспечения устойчивости.
6.1.3 Выполнение: Проверка плавности хода рычага управления циклическим шагом (РЦШ) во всем диапазоне. Рычаг должен перемещаться плавно без рывков и заеданий.
Проверка нейтрального положения РЦШ в продольной и поперечной плоскости.
Установка измерительного оборудования в положение для замера хода в продольной плоскости так, чтобы указатель нейтрального положения приспособления для замера хода и усилий на РЦШ указывал на «0» на измерительной шкале.
Отклонение рычага до упора вперед/назад и замер расстояния хода рычага от нейтрального положения. Повторение аналогичных замеров для хода РЦШ в поперечной плоскости.
С помощью измерительного оборудования (например, динамометра) замер усилия на рукоятке РЦШ в двух контрольных точках при страгивании и в крайнем положении. Для этого необходимо выполнить плавное перемещение РЦШ от нейтрального положения до крайнего с фиксацией через каждые 15—20 мм на 3—5 с; вернуть рычаг управления в нейтральное положение; повторить процедуру с отклонением РЦШ в другое крайнее положение. Допуски, установленные на контролируемые параметры, приведены в таблице 24.
Произвести замеры усилий на рукоятке необходимо в продольной и поперечной плоскостях.
6.1.4 Минимальный перечень регистрируемых параметров:
- усилие страгивания;
- усилие перемещения;
- положение рычага управления циклическим шагом;
Таблица 24 — Допуски при управлении циклическим шагом
Типы АТр | Параметр | Величина допуска |
I-V и уровни S, R, G | Усилие страгивания | ±0,111 даН или ±25 % |
Усилие перемещения | ±0,222 даН или ±10 % |
Примечание — Испытание прекращают, когда все опоры шасси находятся на земле.
6.2 Управление общим шагом и перемещение педалей путевого управления
6.2.1 Цель: Показать, что характеристики усилий, а также положения рычага общего шага и педалей путевого управления соответствуют характеристикам вертолета.
23
ГОСТ Р 70893—2023
6.2.2 Условия полета: На земле, с включенной и выключенной системой обеспечения устойчивости.
6.2.3 Выполнение: Проверка плавности хода педалей во всем диапазоне. Педали должны перемещаться плавно без рывков, заеданий. Необходимо установить педали в нейтральное положение, установить измерительное оборудование в положение для замера хода и усилия. Далее следует выполнить плавное перемещение правой педали управления от нейтрального положения до крайнего с фиксацией через каждые 15—20 мм на 3—5 с; вернуть правую педаль управления в нейтральное положение. Следует повторить процедуру с отклонением левой педали управления в крайнее положение.
Нужно проверить плавность хода рычага общего шага, опустить рычаг общего шага в нижнее положение до установки на механический упор. С помощью измерителя углов следует определить угол между осью симметрии рычага и полом кабины, поднять рычаг общего шага в верхнее положение до установки на механический упор. С помощью измерителя углов нужно определить угол между осью рычага на верхнем упоре и осью рычага на нижнем упоре. Допуски, установленные на контролируемые параметры,приведены в таблице 25.
Подсоединить измерительное оборудование (динамометр) необходимо к центру рукоятки рычага общего шага, затем замерить усилия.
6.2.4 Минимальный перечень регистрируемых параметров:
- усилие страгивания педали путевого управления;
- усилие перемещения педали путевого управления;
- положение педали путевого управления (правой/левой);
- положение рычага общего шага;
- усилие страгивания рычага общего шага;
- усилие перемещения рычага общего шага.
Таблица 25 — Допуски при управлении общим шагом и перемещении педалей путевого управления
Типы АТр | Параметр | Величина допуска |
I-V и уровни S, R, G | Усилие страгивания | ± 0,222 даН или ±25 % |
Усилие перемещения | ±0,445 даН или ±10 % |
6.3 Зависимость усилия от положения педали тормоза
6.3.1 Цель: Показать, что характеристики усилий в зависимости от положения педали тормоза соответствуют характеристикам вертолета.
6.3.2 Условия полета: На земле, статические режимы.
6.3.3 Выполнение: Нужно очень медленно отклонить тормозную педаль на ее полный ход, затем медленно отпустить педаль до возврата в нейтральное положение. Допуски, установленные на контролируемые параметры, приведены в таблице 26.
6.3.4 Минимальный перечень регистрируемых параметров:
- усилие на тормозную педаль (правую/левую);
- положение тормозной педали (правой/левой).
Таблица 26 — Допуски на зависимости усилия от положения педали тормоза
Типы АТр | Параметр | Величина допуска |
I-V и уровни S и R | Усилие | ±2,224 даН или ±10 % |
Уровень G | Оценки не проводят | |
6.4 Скорость триммирования
6.4.1 Цель: Оценить скорость триммирования тренажера вертолета.
6.4.2 Условия полета: На земле, статические режимы. Триммер включен.
6.4.3 Выполнение: Проведение испытания зависит от типа системы управления имитируемого вертолета. Для вертолетов с обратимой системой управления измеряется скорость отклонения элементов системы управления, влияющих на загрузку рычагов управления. Для вертолетов с необратимой
24
ГОСТ Р 70893—2023
системой управления и электромагнитной муфтой размыкания в системе управления испытание можно не проводить. Допуски, установленные на контролируемые параметры, приведены в таблице 27.
6.4.4 Минимальный перечень регистрируемых параметров:
- усилие страгивания;
- усилие перемещения;
- положение рычага управления циклическим шагом.
Таблица 27 — Допуски при скорости триммирования
Типы АТр | Параметр | Величина допуска |
I-V и уровни S, R, G | Усилие страгивания | ±0,111 даН или ±25 % |
Усилие перемещения | ±0,222 даН или ±10 % |
6.5 Динамические характеристики системы управления (по всем осям)
6.5.1 Цель: Оценка параметров затухающих колебательных движений педалей путевого управления, рычага продольно-поперечного управления по всем осям.
6.5.2 Условия полета: На земле. Статические режимы для необратимых систем управления полетом. Триммер включен. Без влияния трения.
6.5.3 Выполнение: Перед проверкой динамических характеристик продольного, поперечного и путевого управления необходимо выполнить регулировку согласно 6.1—6.2, затем установить РЦШ в нейтральное положение. Отклонить рычаг управления вперед/назад нужно на 10 %—20 % от полного хода. Следует отпустить РЦШ. Провести аналогичное испытание с отклонением рычага в поперечной плоскости. Нужно отклонить правую педаль вперед на 10 %—20 % от полного хода. Допуски, установленные на контролируемые параметры, приведены в таблице 28.
6.5.4 Минимальный перечень регистрируемых параметров:
- усилие страгивания;
- усилие перемещения;
- положение рычага управления циклическим шагом.
Таблица 28 — Допуски на динамические характеристики системы управления
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Для систем с недостаточным демпфированием | Т(Р0) ±10 % от Ро или ±0,05 с |
ЦР^) ±20 % от Р^ или ±0,05 с | ||
Т(Р2) ±30 % от Р2 или ±0,05 с | ||
Т(Рп) ±10*(л + 1) % от Рп или ±0,05 с | ||
Т(Ап) ±10 % от Дтах или ±0,5 % от полного отклонения рычага управления (крайние положения) | ||
T(Ad) ±5 % от Ad = граница допуска или ±0,5 % от полного отклонения рычага управления = граница допуска | ||
±1 значительный заброс (как минимум 1 значительный выброс) | ||
Для систем с избыточным и критическим демпфированием | Т(Р0) ±10 % от PQ или ± 0,05 с | |
I-II и уровни R и G | Оценки не проводят |
Примечание — На рисунках 1 и 2 проиллюстрировано применение допусков для систем с недостаточным и критическим демпфированием. Дтах — максимальная амплитуда первого заброса (выхода за пределы значений). Колебания в пределах границы допуска не рассматриваются и к ним не применяются допуски. Результаты должны регистрироваться для нормального перемещения рычага управления в обоих направлениях по каждой оси.
25
ГОСТ Р 70893—2023

Р-период;
А - амплитуда;
Т(Р) - допуск, применяемый к периоду (10 % от Ро, 10 (л+1) % от Р„));
Т(А) - допуск, применяемый к амплитуде (0,1 А^)

Рисунок 2 — Характеристика переходного процесса с критическим демпфированием
26
ГОСТ Р 70893—2023
Для любых органов управления (педали, рычага управление общим шагом), у которых нет пружинных характеристик, должны использоваться альтернативные методы демонстрации соответствия, например непрерывное движение рычага управления от упора до упора с высокой скоростью.
6.6 Балансировочные положения рычагов управления
6.6.1 Цель: Оценка балансировочных положений рычагов управления тренажера вертолета.
6.6.2 Условия полета: Поступательный полет. Полет в зоне влияния земной поверхности. Перемещения вбок, назад и прямолинейный горизонтальный полет, с включенной или выключенной системой обеспечения устойчивости.
6.6.3 Выполнение: Полеты в соответствии с режимами, приведенными в 6.6.2. Каждый режим необходимо выдерживать не менее 20 с. Допуски, установленные на контролируемые параметры, приведены в таблице 29.
6.6.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- угол крена;
- угол тангажа;
- курсовой угол;
- крутящий момент;
- общий шаг НВ;
- продольное отклонение РЦШ;
- положение педалей путевого управления;
- поперечное отклонение РЦШ;
- скорость и направление ветра;
- положение рычага управления общим шагом.
Таблица 29 — Допуски при балансировочных положениях рычагов управления
Типы АТр | Параметр | Величина допуска |
I-V и уровни S и R | Крутящий момент | +3% |
Угол тангажа | ±1,5° | |
Угол крена | ±2° | |
Продольное отклонение РЦШ | ±5% | |
Поперечное отклонение РЦШ | ±5% | |
Положение педалей путевого управления | ±5% | |
Положение рычага управления общим шагом | ±5 % | |
Уровень G | Оценки не проводят | |
Примечание — Может быть представлена серия векторов мгновенного состояния. Рекомендуется представлять результаты испытаний в виде графика зависимостей параметров от скорости.
6.7 Критический азимут
6.7.1 Цель: Оценка управляемости тренажера вертолета для трех относительных направлений ветра в критическом квадранте.
6.7.2 Условия полета: Режим висения, с включенной и выключенной системой обеспечения устойчивости.
6.7.3 Выполнение: Режим висения при относительном направлении ветра в критическом квадранте. Допуски, установленные на контролируемые параметры, приведены в таблице 30.
6.7.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- угол крена;
27
ГОСТ Р 70893—2023
- угол тангажа;
- курсовой угол;
- крутящий момент;
- общий шаг НВ;
- продольное отклонение РЦШ;
- положение педалей путевого управления;
- поперечное отклонение РЦШ;
- скорость и направление ветра;
- положение рычага управления общим шагом.
Таблица 30 — Допуски при критическом азимуте
Типы АТр | Параметр | Величина допуска |
I-V и уровень S | Крутящий момент | ±3 % |
Угол тангажа | ±1,5° | |
Угол крена | ±2° | |
Продольное отклонение РЦШ | ±5 % | |
Поперечное отклонение РЦШ | ±5 % | |
Положение педалей путевого управления | ±5 % | |
Положение рычага управления общим шагом | ±5 % | |
Уровни R и G | Оценки не проводят | |
Регистрируют результаты для трех относительных направлений ветра (в том числе и наиболее критический случай) в критическом квадранте. Требуется ЗОС, чтобы на основе конструкции вертолета и данных РЛЭ или данных летных испытаний определить, как следует представлять результаты испытаний, демонстрирующие минимальный запас управления. Может быть представлена серия векторов мгновенного состояния.
Провести точные измерения ветра очень трудно, поэтому для точного управления условиями полета с помощью измерения путевой скорости (как правило, с помощью GPS) предпочтительно использовать модель ветра, полученную в горизонтальном полете при спокойной погоде (при отсутствии ветра).
6.8 Реакция на продольное управляющее воздействие
6.8.1 Цель: Оценка динамической реакции тренажера вертолета на входное продольное управляющее воздействие.
6.8.2 Условия полета: Висение, с включенной и выключенной системой обеспечения устойчивости.
6.8.3 Выполнение: Установка органов управления в сбалансированное положение. Для этого необходимо отклонить рычаг продольно-поперечного управления вперед/назад на 10 % — 20 % от полного хода, затем вернуть его в исходное положение. Изменение параметров полета по другим каналам не следует компенсировать. Допуски, установленные на контролируемые параметры, приведены в таблице 31.
6.8.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- угловая скорость тангажа;
- угол тангажа;
- угол крена;
- курсовой угол;
- общий шаг НВ;
- крутящий момент;
- поперечное отклонение РЦШ;
- продольное отклонение РЦШ;
28
ГОСТ Р 70893—2023
- положение педалей путевого управления;
- скорость и направление ветра.
Таблица 31 — Допуски при реакции на продольное управляющее воздействие в режиме висения
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Угловая скорость тангажа | ± 10 % или ± 27с |
Изменение угла тангажа | ±10 % или ±1,5° | |
I-II и уровни R и G | Оценки не проводят | |
Примечание — Изменение углового положения определяют как изменение пространственного положения по сравнению со значением непосредственно перед ступенчатым воздействием. Допуск применяется непрерывно, начиная с момента ступенчатого воздействия.
6.9 Реакция на поперечное управляющее воздействие
6.9.1 Цель: Оценка динамической реакции тренажера вертолета на входное поперечное управляющее воздействие.
6.9.2 Условия полета: Висение с включенной и выключенной системой обеспечения устойчивости.
6.9.3 Выполнение: Установка органов управления в сбалансированное положение. Для этого необходимо отклонить рычаг продольно-поперечного управления вправо/влево на 10 % — 20 % от полного хода, затем вернуть его в исходное положение. Изменение параметров полета по другим каналам не следует компенсировать. Допуски, установленные на контролируемые параметры, приведены в таблице 32.
6.9.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- угловая скорость крена;
- угол тангажа;
- угол крена;
- курсовой угол;
- общий шаг НВ;
- крутящий момент;
- поперечное отклонение РЦШ;
- продольное отклонение РЦШ;
- положение педалей путевого управления;
- скорость и направление ветра.
Таблица 32 — Допуски при реакции на поперечное управляющее воздействие в режиме висения
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Угловая скорость крена | ± 10 % или ± 37с |
Изменение угла крена | ±10 % или ±3° | |
I-II и уровни R и G | Оценки не проводят | |
Примечание — Изменение углового положения определяют как изменение пространственного положения по сравнению со значением непосредственно перед ступенчатым воздействием. Допуск применяется непрерывно, начиная с момента ступенчатого воздействия.
6.10 Реакция на путевое управляющее воздействие
6.10.1 Цель: Оценка динамической реакции тренажера вертолета на входное путевое управляющее воздействие.
6.10.2 Условия полета: Висение с включенной и выключенной системой обеспечения устойчивости в обоих направлениях.
29
ГОСТ Р 70893—2023
6.10.3 Выполнение: Установка органов управления в сбалансированное положение. Отклонение правой/левой педали путевого управления вперед на 10 %—20 % от полного хода, затем возврат ее в исходное положение. Изменение параметров полета по другим каналам не нужно компенсировать. Допуски, установленные на контролируемые параметры, приведены в таблице 33.
6.10.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- угловая скорость рыскания;
- угол тангажа;
- угол крена;
- курсовой угол;
- общий шаг НВ;
- крутящий момент;
- поперечное отклонение РЦШ;
- продольное отклонение РЦШ;
- положение педалей путевого управления;
- скорость и направление ветра.
Таблица 33 — Допуски при реакции на путевое управляющее воздействие в режиме висения
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Угловая скорость рыскания | ± 10 % или ± 27с |
Изменение курсового угла | ±10 % или ±2° | |
I-II и уровни R и G | Оценки не проводят | |
Изменение углового положения определяют как изменение пространственного положения по сравнению со значением непосредственно перед ступенчатым воздействием. Допуск применяется непрерывно, начиная с момента ступенчатого воздействия.
6.11 Реакция на вертикальное управляющее воздействие
6.11.1 Цель: Оценка динамической реакции тренажера вертолета на входное вертикальное управляющее воздействие.
6.11.2 Условия полета: Висение с включенной и выключенной системой обеспечения устойчивости.
6.11.3 Выполнение: Установка органов управления в сбалансированное положение. Отклонение рычага управления общим шагом, затем возврат его в исходное положение. Изменение параметров полета по другим каналам не нужно компенсировать. Допуски, установленные на контролируемые параметры, приведены в таблице 34.
6.11.4 Минимальный перечень регистрируемых параметров:
- вертикальная скорость;
- барометрическая высота;
- угловая скорость рыскания;
- угол тангажа;
- угол крена;
- курсовой угол;
- общий шаг НВ;
- крутящий момент;
- поперечное отклонение РЦШ;
- продольное отклонение РЦШ;
- положение педалей путевого управления;
- положение рычага управления общим шагом;
- нормальное ускорение;
- скорость и направление ветра.
30
ГОСТ Р 70893—2023
Таблица 34 — Допуски при реакции на вертикальное управляющее воздействие
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Нормальное ускорение | ±0,1 g |
Вертикальная скорость | ±10 % или ± 0,50 м/с | |
I-II и уровни R и G | Оценки не проводят | |
6.12 Реакция на продольное управляющее воздействие
6.12.1 Цель: Оценка динамической реакции тренажера вертолета на входное продольное управляющее воздействие.
6.12.2 Условия полета: Крейсерский режим полета с включенной и выключенной системой обеспечения устойчивости.
6.12.3 Выполнение: Установка органов управления в сбалансированное положение. Отклонение рычага продольно-поперечного управления вперед/назад на 10 %—20 % от полного хода и удерживание его 10 с, изменение параметров полета по другим каналам не нужно компенсировать. Допуски, установленные на контролируемые параметры, приведены в таблице 35.
6.12.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- угловая скорость тангажа;
- угол тангажа;
- угол крена;
- курсовой угол;
- общий шаг НВ;
- крутящий момент;
- поперечное отклонение РЦШ;
- продольное отклонение РЦШ;
- положение педалей путевого управления;
- скорость и направление ветра.
Таблица 35 — Допуски при реакции на продольное управляющее воздействие в крейсерском режиме полета
Типы АТр | Параметр | Величина допуска |
I-V и уровни S и R | Угловая скорость тангажа | ±10 % или ±27с |
Изменение угла тангажа | ±10 % или ±1,5° | |
Уровень G | Оценки не проводят | |
Примечание — Регистрируют результаты, по крайней мере, для двух скоростей горизонтального полета, одна из которых соответствует или близка к значению воздушной скорости при минимальной потребной мощности. Регистрируют результаты ступенчатого управляющего воздействия в канале, подвергаемом проверке. Реакция по другим осям должна демонстрировать правильное направление при выполнении испытания с выключенной системой обеспечения устойчивости.
Изменение углового положения определяют как изменение пространственного положения по сравнению со значением непосредственно перед ступенчатым воздействием. Допуск применяется непрерывно, начиная с момента ступенчатого воздействия.
6.13 Статическая устойчивость
6.13.1 Цель: Показать, что статическая устойчивость используемой модели соответствует характеристикам вертолета.
6.13.2 Условия полета: Крейсерский режим полета или набор высоты. Режим авторотации. С включенной или выключенной системой обеспечения устойчивости. Условия с включенной и выключенной системой повышения устойчивости необходимы, если система функционального дополнения включает регулирование воздушной скорости.
31
ГОСТ Р 70893—2023
6.13.3 Выполнение: Испытания на крейсерском режиме следует проводить при изменении скорости полета на требуемой высоте при фиксированном положении рычага управления двигателем и рычага общего шага. Это должно быть выполнено путем определения VH (скорости горизонтального полета при максимальной продолжительной мощности) на высоте проведения испытаний. Затем мощность уменьшают для определения условия балансировки при горизонтальном полете на 0,9 VH (или 0,9 VNE, в зависимости от того, какое значение меньше). Затем эту точку записывают как точку балансировки.
Для испытаний на режимах набора высоты и авторотации рычаг общего шага устанавливают в фиксированное положение. Испытания проводят в диапазоне высот (обычно ±600 м), сначала увеличивая скорость полета, по мере получения данных, затем уменьшая скорость в том же диапазоне высот. При повторных пролетах, точка балансировки должна быть взята в начале каждого пролета, пока не будут получены данные о положении рычага общего шага с высокой точностью. Обычно можно точно получить все точки на высокой скорости полета за один пролет, а все точки на малой скорости за другой.
Для испытаний на режиме авторотации частота вращения несущего винта должна быть выбрана таким образом, чтобы изменения частоты вращения несущего винта при изменении скорости полета и высоты не превышали допустимых пределов. Эту точку записывают как точку балансировки. Затем скорость полета увеличивают или уменьшают с интервалами, равными ~20 км/ч, с выдерживанием заданного значения скорости, и данные регистрируют. Необходимо, по крайней мере, по две точки с каждой стороны относительно балансировочной скорости. Допуски, установленные на контролируемые параметры,приведены в таблице 36.
6.13.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- угол крена;
- угол тангажа;
- курсовой угол;
- угол скольжения;
- общий шаг НВ;
- крутящий момент;
- усилие перемещения при продольном отклонении РЦШ от балансировочного положения;
- продольное отклонение РЦШ;
- поперечное отклонение РЦШ;
- положение рычага управления общим шагом;
- положение педалей путевого управления;
- скорость и направление ветра.
Таблица 36 — Допуски при статической устойчивости
Типы АТр | Параметр | Величина допуска |
I-V и уровни S и R | Продольное отклонение РЦШ от балансировочного положения | ±10 % или ±6,3 мм |
Изменение продольного усилия на РЦШ от балансировочного положения | ± 0,222 даН или ±10 % | |
Уровень G | Оценки не проводят | |
Примечание — Регистрируют результаты, как минимум, для двух скоростей, расположенных с каждой стороны относительно балансировочной скорости, взятой в качестве точки отсчета. Может быть представлена серия векторов мгновенного состояния.
6.14 Динамическая устойчивость. Длиннопериодическая реакция
6.14.1 Цель: Показать, что динамическая устойчивость используемой модели в длиннопериодическом режиме соответствует характеристикам вертолета.
6.14.2 Условия полета: Крейсерский режим полета с выключенной системой обеспечения устойчивости.
32
ГОСТ Р 70893—2023
6.14.3 Выполнение: Резкое отклонение рычага продольно-поперечного управления на себя, удерживание его в таком положении в течение 5 с. Возврат рычага в нейтральное положение. Входные воздействия должны быть достаточно большими, чтобы обеспечить коэффициент перегрузки ±0,2д и/или изменение положения по тангажу от ±5°до ±15°. Допуски, установленные на контролируемые параметры,приведены в таблице 37.
6.14.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- угол крена;
- угол тангажа;
- курсовой угол;
- крутящий момент;
- общий шаг НВ;
- продольное отклонение РЦШ;
- поперечное отклонение РЦШ;
- положение педалей путевого управления;
- нормальное ускорение;
- скорость и направление ветра.
Таблица 37 — Допуски при длиннопериодической реакции
Типы АТр | Параметр | Величина допуска |
I-V и уровни S, R, G | Расчетный период | ±10% |
Расчетное время уменьшения вдвое или удвоения амплитуды колебаний, или изменение коэффициента демпфирования | ±10 % ±0,02 |
Примечание — Для периодических реакций регистрируют результаты трех полных циклов колебаний (6 забросов после завершения управляющего воздействия) или в течение времени, достаточного для оценки времени уменьшения амплитуды колебаний вдвое или ее удвоения, в зависимости от того, какое значение из двух меньше.
Испытание может быть прервано раньше, чем через 20 с, если пилот, проводящий испытание, считает, что результаты начинают расходиться, причем этот процесс не поддается контролю. Ответная реакция может не повторяться в течение установленного времени для конкретных вертолетов. В этих случаях необходимо показать, что расхождение в результатах, по крайней мере, имеет объяснение. Для непериодических реакций результаты должны иметь одинаковый характер схождения или расхождения, как и в данных летных испытаний.
Для непериодических реакций динамика изменения по времени должна совпадать в течение периода 20 с, после освобождения рычагов управления в пределах изменения угла тангажа ±20 % или ±3°и ±9,3 км/ч воздушной скорости.
Во избежание непреднамеренного вмешательства летчика в управление в процессе выполнения режимов рычаги управления необходимо освобождать полностью — отпускать рычаг управления и снимать ноги с педалей. Прекращение режима и вмешательство в управление осуществляется при приближении к ограничению по какому-либо параметру.
Пример — Для ручной проверки результатов вычислений значений периода, времени уменьшения амплитуды вдвое (или увеличения в два раза) и коэффициента демпфирования, можно воспользоваться следующим методом:
1) величины периодов определяют посредством измерения интервалов времени между двумя последовательными пиками на нанесенной на графике кривой. Более общий метод предусматривает определение интервала времени, между несколькими последовательными максимумами или минимумами и вычислением среднего значения периода. Измерения не должны начинаться вблизи начального момента времени на графике;
2) для колебательного движения радиальная скорость колебаний п = 2п/Тр, где Тр — период колебаний;
33
ГОСТ Р 70893—2023
3) коэффициент демпфирования вычисляют по формуле
In (А^2) ^{Т^Т^
(1)
где Av А2 — амплитуды, которые должны располагаться достаточно далеко друг от друга;
Т^ Т2 — соответствующие моменты времени;
4) время уменьшения амплитуды вдвое Т1/2 = 0,693/ ^ юп.
6.15 Динамическая устойчивость. Короткопериодическая реакция
6.15.1 Цель: Показать, что динамическая устойчивость используемой модели в короткопериодическом режиме соответствует характеристикам вертолета.
6.15.2 Условия полета: Крейсерский режим полета или набор высоты с включенной и выключенной системой обеспечения устойчивости.
6.15.3 Выполнение: Резкое отклонение рычага продольно-поперечного управления на себя, удерживание его в таком положение в течение 5 с. Следующее перемещение рычага продольно-поперечного управления от себя, удержание его в таком положении в течение 5 с. Возврат рычага в нейтральное положение. Входные воздействия должны быть достаточно большими, чтобы обеспечить коэффициент перегрузки ±0,2 g и/или изменение положения по тангажу от ±5°до ±15°. Допуски, установленные на контролируемые параметры, приведены в таблице 38.
6.15.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- угол крена;
- угол тангажа;
- угловая скорость тангажа;
- крутящий момент;
- курсовой угол;
- общий шаг НВ;
- поперечное отклонение РЦШ;
- продольное отклонение РЦШ;
- нормальное ускорение;
- положение педалей путевого управления;
- скорость и направление ветра.
Таблица 38 — Допуски при короткопериодической реакции
Типы АТр | Параметр | Величина допуска |
I-V и уровни S, R, G | Угол тангажа или Угловая скорость тангажа | ±1,5° ±27с |
Нормальное ускорение | ±0,1 g |
Должны быть представлены результаты, по крайней мере, для двух скоростей горизонтального полета. Обычно это испытание проводят при введении двойного управляющего импульса с частотой, характерной для колебаний данного вертолета.
Во избежание непреднамеренного вмешательства летчика в управление в процессе выполнения режимов рычаги управления необходимо освобождать полностью — отпускать рычаг управления и снимать ноги с педалей. Прекращение режима и вмешательство в управление осуществляют при приближении к ограничению по какому-либо параметру.
6.16 Устойчивость при выполнении маневра
6.16.1 Цель: Показать, что имитация устойчивости при маневрах в используемой модели соответствует характеристикам вертолета.
34
ГОСТ Р 70893—2023
6.16.2 Условия полета: Крейсерский режим полета или набор высоты с включенной или выключенной системой обеспечения устойчивости. Левые и правые развороты.
6.16.3 Выполнение: Балансировка на режиме горизонтального полета. Испытание выполняют посредством устойчивого увеличения угла крена до достижения заданного максимального угла либо посредством установления режима при нескольких промежуточных углах крена, включая максимальный. Обязательными условиями выполнения полета являются постоянство параметров полета при выполнении режима и отсутствие скольжения. После взлета необходимо набрать высоту не менее 500 м и установить режим горизонтального полета со скоростью 100 км/ч. Полет выполняют в течение 15—20 с без кренов и скольжений. Далее, не изменяя величины общего шага НВ, следует выполнить левый/ правый координированный разворот с креном 10°. Необходимо выдержать установившийся режим координированного разворота в течение 15—20 с. Затем выполнить аналогичные режимы с кренами 20°, 30°, 45°. Выполняют левые и правые виражи. Допуски, установленные на контролируемые параметры, приведены в таблице 39.
6.16.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- угол крена;
- угол тангажа;
- курсовой угол;
- угол скольжения;
- общий шаг НВ;
- крутящий момент;
- положение педалей путевого управления;
- продольное отклонение РЦШ;
- поперечное отклонение РЦШ;
- усилие перемещения при продольном отклонении РЦШ от балансировочного положения;
- скорость и направление ветра.
Таблица 39 — Допуски при устойчивости при выполнении маневра
Типы АТр | Параметр | Величина допуска |
I-V и уровни S и R | Продольное отклонение РЦШ от балансировочного положения | ±10 % или ±6,3 мм |
Изменение продольного усилия на РЦШ от балансировочного положения | ± 0,222 даН или ±10 % | |
Уровень G | Оценки не проводят | |
Регистрируют результаты для двух воздушных скоростей, в том числе для скорости, соответствующей минимальной потребной мощности. Для каждого значения скорости должны быть представлены результаты выполнения разворотов с углами крена примерно 30° и 45°.
Для необратимых систем усилия могут быть указаны в виде графика зависимости.
Может быть представлена серия векторов мгновенного состояния.
6.17 Реакция на поперечное управляющее воздействие
6.17.1 Цель: Оценка динамической реакции тренажера вертолета на входное поперечное управляющее воздействие.
6.17.2 Условия полета: Крейсерский режим полета, с включенной и выключенной системой обеспечения устойчивости.
6.17.3 Выполнение: Установка органов управления в сбалансированное положение. Отклонение рычага продольно-поперечного управления вправо/влево на 10 %—20 % от полного хода и удержание его 10 с. Изменение параметров полета по другим каналам не нужно компенсировать. Допуски, установленные на контролируемые параметры, приведены в таблице 40.
6.17.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
35
ГОСТ Р 70893—2023
- угловая скорость крена;
- угол тангажа;
- угол крена;
- курсовой угол;
- общий шаг НВ;
- крутящий момент;
- положение педалей путевого управления;
- продольное отклонение РЦШ;
- поперечное отклонение РЦШ;
- скорость и направление ветра.
Таблица 40 —Допуски при реакции на поперечное управляющее воздействие в крейсерском режиме полета
Типы АТр | Параметр | Величина допуска |
I-V и уровни S, R, G | Угловая скорость крена | ±10 % или ±37с |
Угол крена | ±10 % или ±3° |
Регистрируют результаты, по крайней мере, для двух скоростей горизонтального полета, одна из которых соответствует или близка к значению воздушной скорости при минимальной потребной мощности.
Изменение углового положения определяют как изменение пространственного положения по сравнению со значением непосредственно перед ступенчатым воздействием. Допуск применяется непрерывно, начиная с момента ступенчатого воздействия.
6.18 Реакция на путевое управляющее воздействие
6.18.1 Цель: Оценка динамической реакции тренажера вертолета на входное путевое управляющее воздействие.
6.18.2 Условия полета: Крейсерский режим полета, с включенной и выключенной системой обеспечения устойчивости.
6.18.3 Выполнение: Установка органов управления в сбалансированное положение. Отклонение правой/левой педали путевого управления вперед на 10 %—20 % от полного хода, затем возврат ее в исходное положение, изменение параметров полета по другим каналам не нужно компенсировать. Допуски, установленные на контролируемые параметры, приведены в таблице 41.
6.18.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- угловая скорость рыскания;
- угол тангажа;
- угол крена;
- курсовой угол;
- общий шаг НВ;
- крутящий момент;
- поперечное отклонение РЦШ;
- продольное отклонение РЦШ;
- положение педалей путевого управления;
- скорость и направление ветра.
Таблица 41 —Допуски при реакции на путевое управляющее воздействие в крейсерском режиме полета
Типы АТр | Параметр | Величина допуска |
III-V и уровень S | Угловая скорость рыскания | ±10% или ± 2 % |
Изменение курсового угла | ±10 % или ±2° | |
I-II и уровни R и G | Оценки не проводят | |
36
ГОСТ Р 70893—2023
Регистрируют результаты, по крайней мере, для двух скоростей горизонтального полета, одна из которых соответствует или близка к значению воздушной скорости при минимальной потребной мощности.
Изменение курса определяют как изменение по сравнению со значением непосредственно перед ступенчатым воздействием. Допуск применяется непрерывно, начиная с момента ступенчатого воздействия.
6.19 Путевая статическая устойчивость
6.19.1 Цель: Оценка динамической реакции тренажера вертолета на входное путевое управляющее воздействие.
6.19.2 Условия полета: Набор высоты или снижение, с включенной или выключенной системой обеспечения устойчивости.
6.19.3 Выполнение: Путевую статическую устойчивость определяют по зависимостям отклонения педалей путевого управления, необходимого для выдерживания режима, от угла бокового скольжения при прямолинейном полете. Одновинтовой вертолет в прямолинейном координированном полете двигается с боковым скольжением, вызываемым тягой рулевого винта и действием боковых сил системы фюзеляж/несущий винт. Обычно это условие принимают в качестве балансировочного с известным углом скольжения. Значения скорости полета при выполнении режимов со скольжением должны быть равны значениям балансировочной скорости. Необходимо стабилизировать вертолет в точке балансировки и записать значение приборной скорости. Следует записать условия балансировки, включая боковое скольжение, затем выдерживать фиксированное положение рычага общего шага и режима двигателя для оставшегося этапа маневра. Нужно плавно изменять угол рыскания при помощи путевого управления и скоординированным отклонением поперечного управления установить требуемое значение угла скольжения. Необходимо записать значение скорости полета сразу после выполнения путевого маневра, затем продолжать полет с новой скоростью при выдерживании постоянного курса и записать значения приборной скорости, положения рычагов управления, угла скольжения, частоты вращения винтов, скорости снижения, угла крена. Следует плавно возвратить вертолет к значению собственного угла скольжения. Допуски, установленные на контролируемые параметры, приведены в таблице 42.
6.19.4 Минимальный перечень регистрируемых параметров:
- вертикальная скорость;
- барометрическая высота;
- угловая скорость крена;
- угол тангажа;
- угол крена;
- курсовой угол;
- угол скольжения;
- общий шаг НВ;
- поперечное отклонение РЦШ;
- крутящий момент;
- положение педалей путевого управления;
- продольное отклонение РЦШ;
- усилие перемещения при продольном отклонении РЦШ от балансировочного положения;
- скорость и направление ветра;
- усилие перемещения на педалях путевого управления;
- усилие перемещения при поперечном отклонении РЦШ от балансировочного положения.
37
ГОСТ Р 70893—2023
Таблица 42 — Допуски при путевой статической устойчивости
Типы АТр | Параметр | Величина допуска |
I-V и уровни S и R | Угол крена | ±1,5° |
Вертикальная скорость | ±10 % или ±0,5 м/с | |
Поперечное отклонение РЦШ или изменение поперечного усилия на РЦШ от балансировочного положения | ±10 % или ± 6,3 мм или ±10 % или ±0,222 даН | |
Положение педалей путевого управления или изменение усилия на педалях путевого управления от балансировочного положения | ±10 % или ± 6,3 мм или ±10 % или ±0,444 даН | |
Продольное отклонение РЦШ или изменение продольного усилия на РЦШ от балансировочного положения | ±10 % или ± 6,3 мм или ±10 % или ±0,222 даН | |
Уровень G | Оценки не проводят | |
Регистрируют результаты, по крайней мере, для двух значений углов скольжения на левый и правый борт (от балансировочного положения). Может быть представлена серия векторов мгновенного состояния. При положительной путевой статической устойчивости происходит увеличение отклонения левой педали для увеличения угла скольжения вправо и, наоборот, увеличение отклонения правой педали для увеличения угла скольжения влево.
6.20 Колебания в поперечной плоскости и по курсу
6.20.1 Цель: Показать, что динамические характеристики поперечной и путевой устойчивости используемой модели соответствуют характеристикам вертолета.
6.20.2 Условия полета: Крейсерский режим полета или набор высоты, с включенной и выключенной системой обеспечения устойчивости.
6.20.3 Выполнение: Резкое отклонение рычага продольно-поперечного управления вправо (или правой педали путевого управления вперед), удерживание ее в таком положение в течение 5 с. Затем перемещение рычага продольно-поперечного управления влево (или левой педали путевого управления вперед), удерживание ее в таком положение в течение 5 с. Возврат рычага (или педали) в нейтральное положение. Допуски, установленные на контролируемые параметры, приведены в таблице 43.
6.20.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- угловая скорость крена;
- угол тангажа;
- угол крена;
- курсовой угол;
- угол скольжения;
- общий шаг НВ;
- поперечное отклонение РЦШ;
- крутящий момент;
- положение педалей путевого управления;
- продольное отклонение РЦШ;
- скорость и направление ветра.
38
ГОСТ Р 70893—2023
Таблица 43 — Допуски при колебании в поперечной плоскости и по курсу
Типы АТр | Параметр | Величина допуска |
I-V и уровни S, R, G | Расчетный период | ± 0,5 с или ±10 % |
Расчетное время уменьшения вдвое или удвоения амплитуды колебаний или изменение коэффициента демпфирования | ±10 % ±0,02 | |
Разница времени достижения максимальных значений углов крена и скольжения | ±20 % или ±1 с |
Регистрируют результаты, по крайней мере, для двух значений воздушной скорости.
Для периодических реакций регистрируют результаты шести полных циклов колебаний (12 забросов после завершения управляющего воздействия) или в течение времени, достаточного для оценки времени уменьшения амплитуды колебаний вдвое или ее удвоения, в зависимости от того, какое значение из двух меньше. Для непериодических реакций динамика изменения параметров по времени должна быть налажена в расчете на период 20 с после освобождения рычагов управления в диапазоне: ±57с по угловой скорости крена или ±5° по изменению положения по крену; и ±47с по угловой скорости рыскания или ± 4° по курсу. Испытание может быть прекращено до истечения 20 с, если пилот, проводящий испытание, считает, что результаты начинают расходиться, причем этот процесс носит неконтролируемый характер.
6.21 Спиральная устойчивость
6.21.1 Цель: Показать, что спиральная устойчивость используемой модели соответствует характеристикам имитируемого вертолета.
6.21.2 Условия полета: Крейсерский режим полета или набор высоты, с включенной и выключенной системой обеспечения устойчивости.
6.21.3 Выполнение: Установка органов управления в сбалансированное положение. Отклонение рычага продольно-поперечного управления вправо/влево (или правой/левой педали путевого управления вперед) для достижения заданного угла крена. После достижения заданного угла крена возврат рычага (педали) в нейтральное положение. Запись результатов испытания производится в течение, как минимум, 20 с после снятия управляющего воздействия с рычага продольно-поперечного управления (педали путевого управления). Испытания завершают при нулевом угле крена, либо когда пилот определяет, что угловое положение становится неконтролируемым. Допуски, установленные на контролируемые параметры, приведены в таблице 44.
Альтернативное испытание: регистрируют результаты только входных воздействий циклического поперечного управления (без входных воздействий педалей), необходимых для поддержания угла крена приблизительно 30° от балансировочного значения в установившемся полете.
6.21.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- угловая скорость крена;
- угол тангажа;
- угол крена;
- курсовой угол;
- угол скольжения;
- общий шаг НВ;
- поперечное отклонение РЦШ;
- крутящий момент;
- положение педалей путевого управления;
- продольное отклонение РЦШ;
- скорость и направление ветра.
39
ГОСТ Р 70893—2023
Таблица 44 — Допуски при спиральной устойчивости
Типы АТр | Параметр | Величина допуска |
I-V и уровни S, R, G | Правильное направление и изменение угла крена | ±2° или ±10 % в течение 20 с |
При использовании альтернативного метода испытаний: | ||
Поперечное отклонение РЦШ | ±20 % или ±12,7 мм | |
Испытание проводят в обоих направлениях. При использовании альтернативного метода испытаний может быть использована серия тестов мгновенного состояния.
6.22 Внутреннее/внешнее скольжение
6.22.1 Цель: Показать, что характеристики взаимосвязанного установившегося поперечного и путевого движения соответствуют характеристикам имитируемого вертолета.
6.22.2 Условия полета: Крейсерский режим полета или набор высоты, с включенной и выключенной системой обеспечения устойчивости. Случай с системой обеспечения устойчивости должен включать систему координирования разворота, при наличии.
6.22.3 Выполнение: Соблюдая соответствующий режим полета, медленно отклонение рычага про-дольно-поперечного управления вправо/влево. Допуски, установленные на контролируемые параметры, приведены в таблице 45.
6.22.4 Минимальный перечень регистрируемых параметров:
- воздушная скорость;
- барометрическая высота;
- угловая скорость крена;
- угол тангажа;
- угол крена;
- курсовой угол;
- угол скольжения;
- общий шаг НВ;
- поперечное отклонение РЦШ;
- крутящий момент;
- положение педалей путевого управления;
- продольное отклонение РЦШ;
- скорость и направление ветра.
Таблица 45 — Допуски при внутреннем/внешнем скольжении
Типы АТр | Параметр | Величина допуска |
I-V и уровни S и R | Неустановившийся угол скольжения | ±2° |
Уровень G | Оценки не проводят |
Результаты регистрируют для разворотов в обоих направлениях.
7 Система подвижности. Вибрации
7.1 Частотная характеристика
7.1.1 Цель: Продемонстрировать динамические характеристики системы подвижности при колебательном входном сигнале в диапазоне частот, приемлемом с точки зрения прочностных и эксплуатационных характеристик тренажера (обычно в диапазоне от 0,1 Гц до 10—15 Гц).
7.1.2 Выполнение: Для этой проверки все шесть гидроприводов можно использовать независимо или одновременно. При одновременном действии можно оценить общий отклик платформы вместо функционирования каждого гидроцилиндра. За счет использования акселерометра, установленного на рабочем месте летчика, можно оценить не только характеристики системы подвижности, но и резонанс конструкции тренажера. Не рекомендуется проводить это испытание в ручном режиме, поскольку пред-
40
ГОСТ Р 70893—2023
усмотрено введение специальных возбуждающих сигналов, позволяющих корректно проводить тестирование и анализ результатов. В любом случае анализируют не ощущения движения, испытываемые летным экипажем, а физическую реакцию самой системы подвижности. Допуски, установленные на контролируемые параметры, приведены в таблице 46.
7.1.3 Минимальный перечень регистрируемых параметров:
- возбуждающий входной сигнал по ускорению (синусоида с заданной амплитудой на конкретных частотах);
- выходной сигнал с датчиков ускорений.
Таблица 46 — Допуски на частотную характеристику
Типы АТр | Параметр | Величина допуска |
I-V и уровни S и R | Неустановившийся угол скольжения | ±2° |
Уровень G | Оценки не проводят | |
Допуски остаются на усмотрение заявителя квалификационной оценки, но результаты должны быть переданы как часть QTG и быть в наличии для инспекции при каждой оценке.
Пример — Ниже представлен пример результата данного испытания в формате диаграммы Боде (рисунок 3). Приведенные в данном случае допуски, являются примером типовых «требований заявителя квалификационной оценки».

Рисунок 3 — Диаграмма Боде
7.2 Проверка системы подвижности при изменении направления движения платформы на противоположное
7.2.1 Цель: В любой системе подвижности возникают нелинейные искажения воспроизведения ускорений при смене направления движения платформы, обусловленные наличием нелинейностей (люфты, трение и т.д.). Цель данного испытания состоит в том, чтобы продемонстрировать, что система подвижности тренажера не создает значительных искажений при изменении направления движения платформы на противоположное.
41
ГОСТ Р 70893—2023
7.2.2 Выполнение: Синусоидальный входной сигнал с частотой 0,5 Гц и варьируемой амплитудой, соответствующей ускорениям от 0,05 до 0,2 д, подается на тестируемую степень свободы. Регистрируется сигнал сдатчика ускорений по тестируемой степени свободы. Приемлемость величины нелинейных пиковых искажений оценивают по разности входного и выходного (сдатчиков) сигналов.
Не рекомендуется проводить это испытание в ручном режиме, поскольку предусмотрено введение специальных возбуждающих сигналов, позволяющих корректно проводить тестирование и анализ результатов. В любом случае анализируют не ощущения движения, испытываемые летным экипажем, а физическую реакцию самой системы подвижности. Допуски, установленные на контролируемые параметры, приведены в таблице 47.
7.2.3 Минимальный перечень регистрируемых параметров:
- синусоидальный сигал на тестируемую степень линейных перемещений;
- сигналы датчиков ускорений по тестируемой степени свободы.
Таблица 47 — Допуски при проверке системы подвижности при изменении направления движения платформы на противоположное
Типы АТр | Величина допуска |
IV-V и уровни R и R1 | Как определено заявителем |
I-III и уровни S и G | Оценки не проводят |
Допуски остаются на усмотрение заявителя квалификационной оценки, но результаты должны быть переданы как часть QTG и быть в наличии для инспекции при каждой оценке.
Пример — Ниже представлен типовой пример результата данного испытания (рисунок 4). На данном графике представлена реакция системы подвижности при вертикальном перемещении платформы системы с частотой 0,5 Гц. Приведенные в данном случае допуски, являются примером типовых «требований заявителя квалификационной оценки».
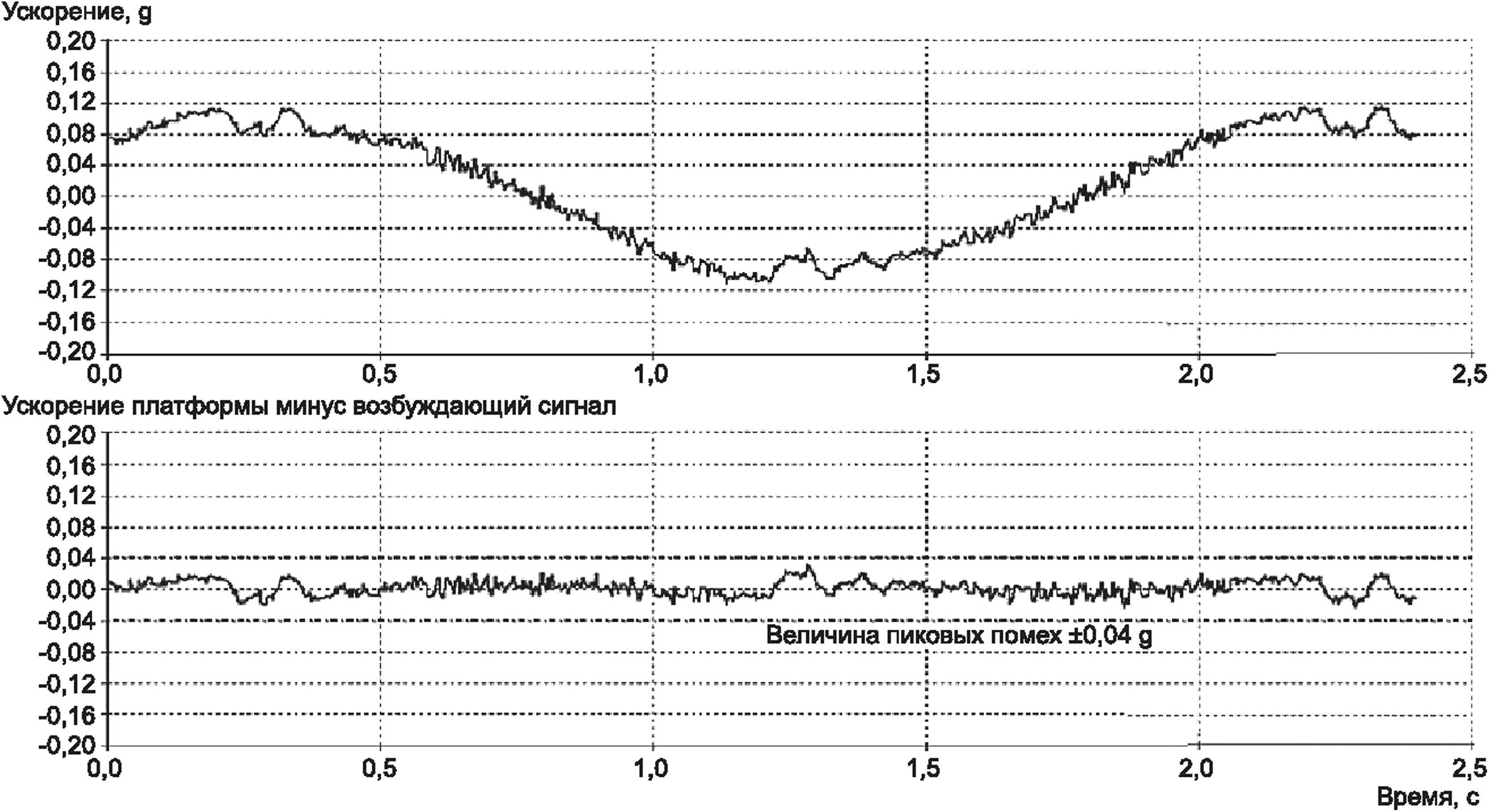
Рисунок 4 — Реакция системы подвижности
42
ГОСТ Р 70893—2023
7.3 Акселерационные эффекты
7.3.1 Цель: Подтвердить, что акселерационные и вибрационные эффекты, ощущаемые в результате движения тренажера, качественно сходны с эффектами, ощущаемыми в реальном вертолете.
Примечание — Данная группа испытаний включена в раздел функциональных и субъективных испытаний, см. [1].
7.3.2 Выполнение: Проводят субъективную (экспертную) оценку тренажера летчиком на разных режимах руления и полета при различных скоростях и условиях. Отмечают начало, амплитуду, частоту и общие качественные и количественные показатели воспроизводимых акселерационных эффектов и тряски. Допуски, установленные на контролируемые параметры, приведены в таблице 48.
7.3.3 Минимальный перечень регистрируемых параметров: Субъективная оценка.
Таблица 48 — Допуски на акселерационные эффекты
Типы АТр | Величина допуска |
I-V | См. [2] |
Автоматическое проведение и сверка с допусками невозможна.
7.4 Стабильность системы подвижности
7.4.1 Цель: Подтверждение того, что с течением времени качество программного и аппаратного обеспечения системы подвижности не изменилось. Испытание позволяет более точно определить те изменения, которые отрицательно повлияли на уровень воспроизведения акселерационных воздействий, который был установлен во время первоначальной квалификационной оценки.
7.4.2 Условия полета: На земле и в воздухе.
7.4.3 Выполнение: Проверку проводят путем подачи последовательности тестовых ступенчатых сигналов линейных и угловых ускорений по различным степеням свободы.
При первоначальной квалификационной оценке испытание проводят для создания эталона. При повторной квалификационной оценке выходные сигналы сдатчиков перегрузок не должны превышать ±0,05д реакции, полученной при первоначальном испытании. Допуски, установленные на контролируемые параметры, приведены в таблице 49.
7.4.4 Минимальный перечень регистрируемых параметров:
- входные ступенчатые сигналы линейного ускорения по осям х, у, z;
- выходные сигналы с акселерометров по осям х, у, z;
- входные ступенчатые сигналы углового ускорения по тангажу, крену и рысканию;
- входные сигналы угловой скорости по тангажу, крену и рысканию.
Таблица 49 — Допуски при стабильности системы подвижности
Типы АТр | Величина допуска |
IV-V и уровни R и R1 | ±0,05 g от фактических линейных ускорений платформы (при повторной квалификационной оценке) |
I-III и уровни S и G | Оценки не проводят |
Пример — На рисунках 5—17 представлен результат испытания «Стабильность системы подвижности» (на земле), полученный при первоначальной квалификационной оценке. Данный результат будет внесен в QTG и послужит эталоном при повторных (периодических) квалификационных оценках.
43
ГОСТ Р 70893—2023
Входной сигнал ускорения по оси X [G] 0,8
0,4
0,0
-0,4
-0,8
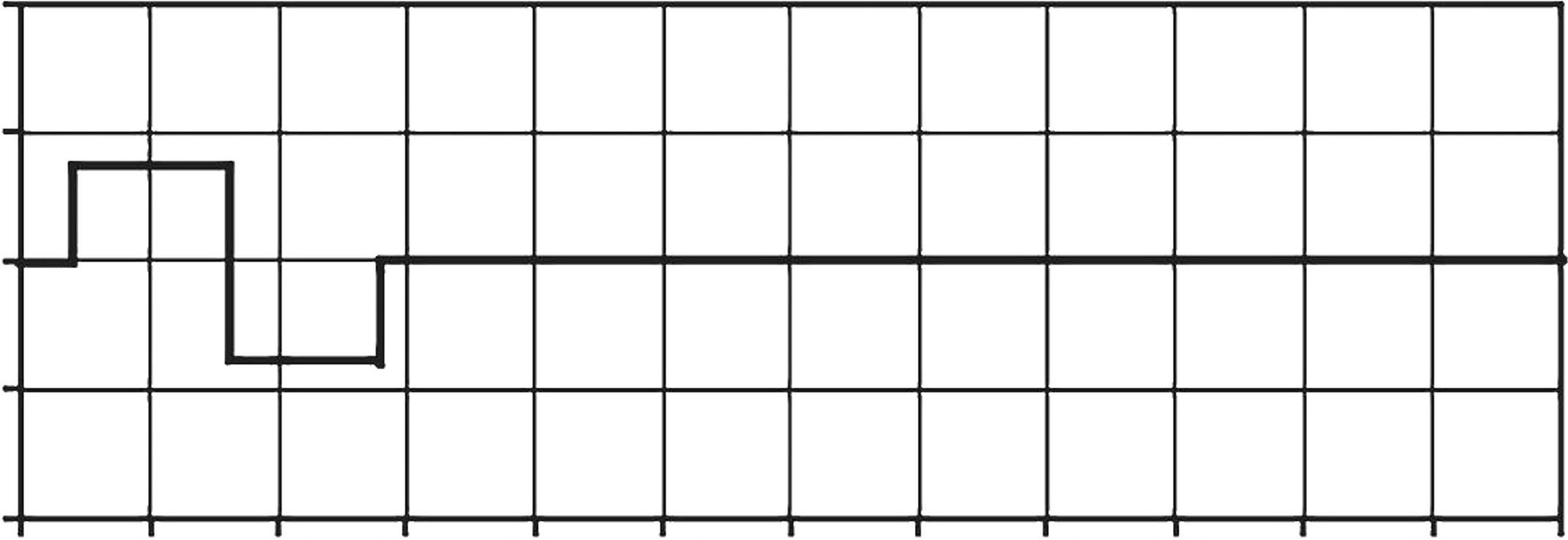
0,0 5,0 10,0 15,0 20,0 25,0 30,0 35,0 40,0 45,0 50,0 55,0 60,0
Время, с
Входной сигнал ускорения по оси Y [G] 0,8
0,4
0,0
-0,4
-0,8
0,0 5,0 10,0 15,0 20,0 25,0 30,0 35,0 40,0 45,0 50,0 55,0 60,0
Время, с
Входной сигнал ускорения по оси Z [G]
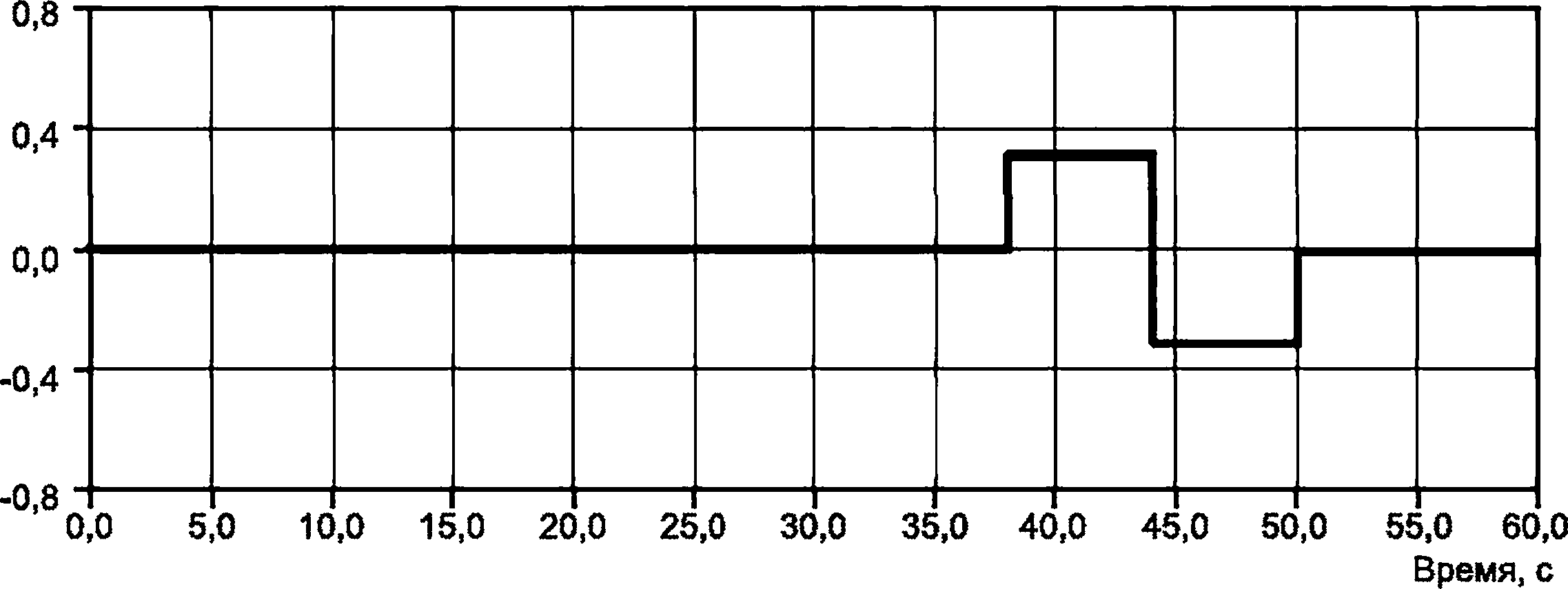
Рисунок 5 — Входные сигналы линейного ускорения
44
ГОСТ Р 70893—2023
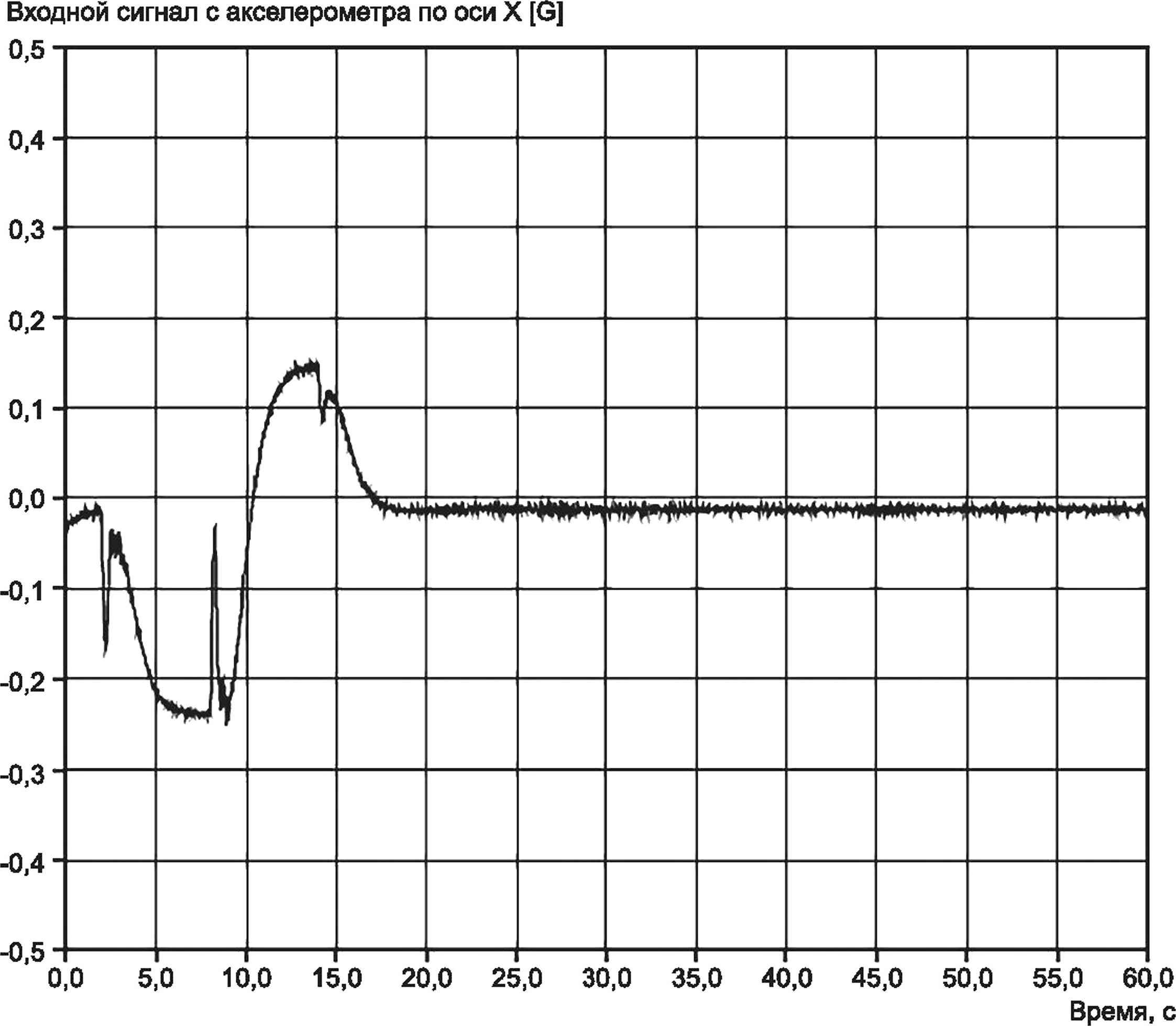
Рисунок 6 — Реакция на входные сигналы линейного ускорения по оси X
45
ГОСТ Р 70893—2023
Входной сигнал с акселерометра по оси Y [G]
0,5 0,4 0,3 0,2 0,1 0,0 -0,1 -0,2 -0,3 -0,4 -0,5 | |||||||||||||||
Л | |||||||||||||||
1 \ | |||||||||||||||
0 | 0 5 | 0 10 | ,0 15 | ,0 20 | ,0 25 | ,0 30 | ',0 35 | ,0 40 | ,0 45 | ,0 5С | ,0 55 | ,0 60 | ,0 | ||
Время, с
Рисунок 7 — Реакция на входные сигналы линейного ускорения по оси Y
46
ГОСТ Р 70893—2023
Входной сигнал с акселерометра по оси Z [G]
0,5- | |||||||||||||
0,4 - | |||||||||||||
0,3 - | |||||||||||||
0,1 “ 0,0- | |||||||||||||
Ф111'F | |||||||||||||
-0,2 - А О _ | |||||||||||||
-и,О ~ -ПЛ- | |||||||||||||
-0,5- | |||||||||||||
0,0 5,0 10,0 15,0 20,0 25,0 30,0 35,0 40,0 45,0 50,0 55,0 60,0
Время, с
Рисунок 8 — Реакция на входные сигналы линейного ускорения по оси Z
47
ГОСТ Р 70893—2023

Время, с
48
Положение гидроцилиндра 2, дюйм

Время, с
Положение гидроцилиндра 3, дюйм

Рисунок 9 — Положение гидроцилиндров 1—3
Время, с
ГОСТ Р 70893—2023

Время, с
Положение гидроцилиндра 5, дюйм
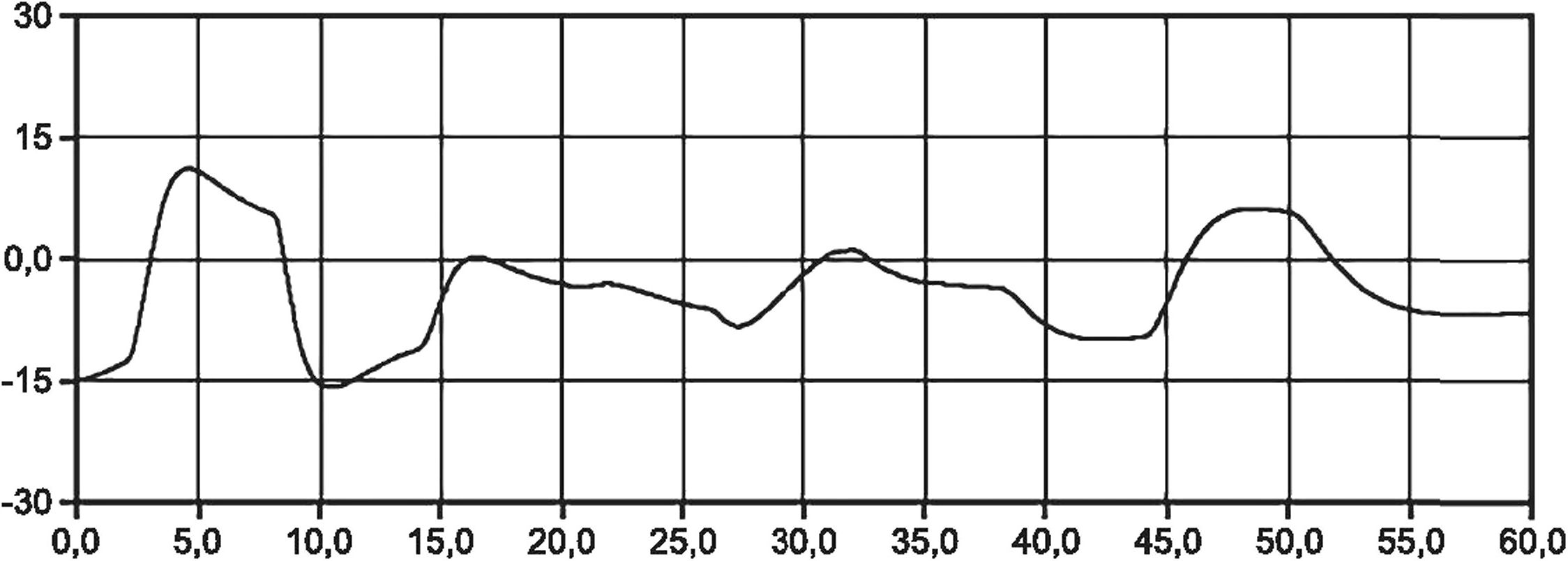
Время, с

Рисунок 10 — Положение гидроцилиндров 4—6
49
ГОСТ Р 70893—2023

Рисунок 11 — Входные сигналы углового ускорения
50
ГОСТ Р 70893—2023
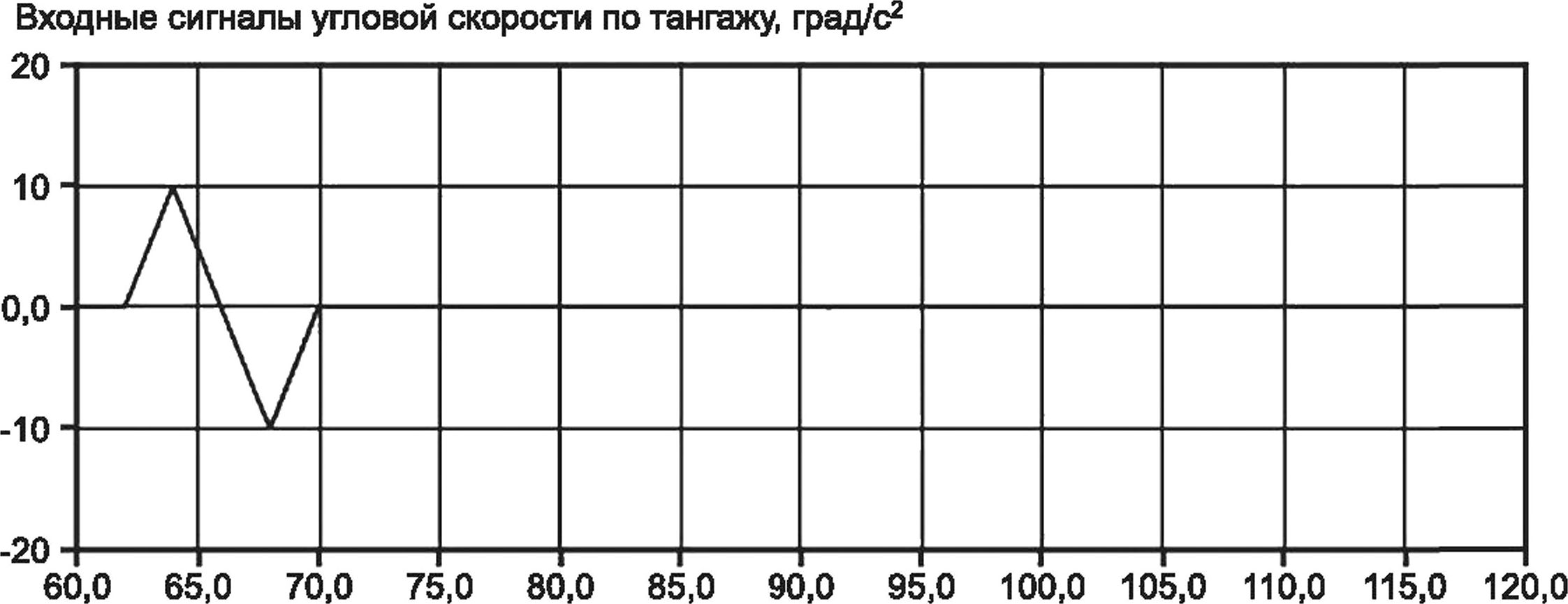
Время, с
Входные сигналы угловой скорости по крену, град/с2
201 | |||||||||||||
ПЛ- | д | ||||||||||||
/ | |||||||||||||
-1U " | |||||||||||||
6С | 1,0 65 | 1,0 70 | ,0 75 | »,0 8С | 1,0 85 | ,0 9С | 1,0 95 | ,0 10 | ),0 10 | 5,0 11' | 3,0 111 Е | 5,0 12 фемя, с | 3,0 |
Входные сигналы угловой скорости по рысканию, град/с2
20- 4 Л - | |||||||||||||
/ | \ | ||||||||||||
и,и " | |||||||||||||
-10 “ | |||||||||||||
-20 "I 60 | ,0 65 | 1,0 70 | ,0 75 | ►,0 8€ | ,0 85 | ,0 90 | ',0 95 | ,0 10 | 3,0 10 | 5,0 111 | 3,0 111 | 5,0 12 | 3,0 |
Время, с
Рисунок 12 — Входные сигналы угловой скорости
51
ГОСТ Р 70893—2023
Входной сигнал с акселерометра по оси X [G]
7 | WM | ||||||||||
“\ | |||||||||||
60,0 65,0 70,0 75,0 80,0 85,0 90,0 95,0 100,0 105,0 110,0 115,0 120,0
Время, с
Рисунок 13 — Реакция по оси X на входные сигналы углового ускорения
52
ГОСТ Р 70893—2023
Входной сигнал с акселерометра по оси Y [G]
^Sw | A i | 1. U. | |||||||||
60,0 65,0 70,0 75,0 80,0 85,0 90,0 95,0 100,0 105,0 110,0 115,0 120,0
Время, с
Рисунок 14 — Реакция по оси Y на входные сигналы углового ускорения
53
ГОСТ Р 70893—2023
Входной сигнал с акселерометра по оси Z [G]
.1 lUfL.l . | J.. J.^^b | Lb limLi | |||||||||
60,0 65,0 70,0 75,0 80,0 85,0 90,0 95,0 100,0 105,0 110,0 115,0 120,0
Время, с
54
Рисунок 15 — Реакция по оси Z на входные сигналы углового ускорения
ГОСТ Р 70893—2023
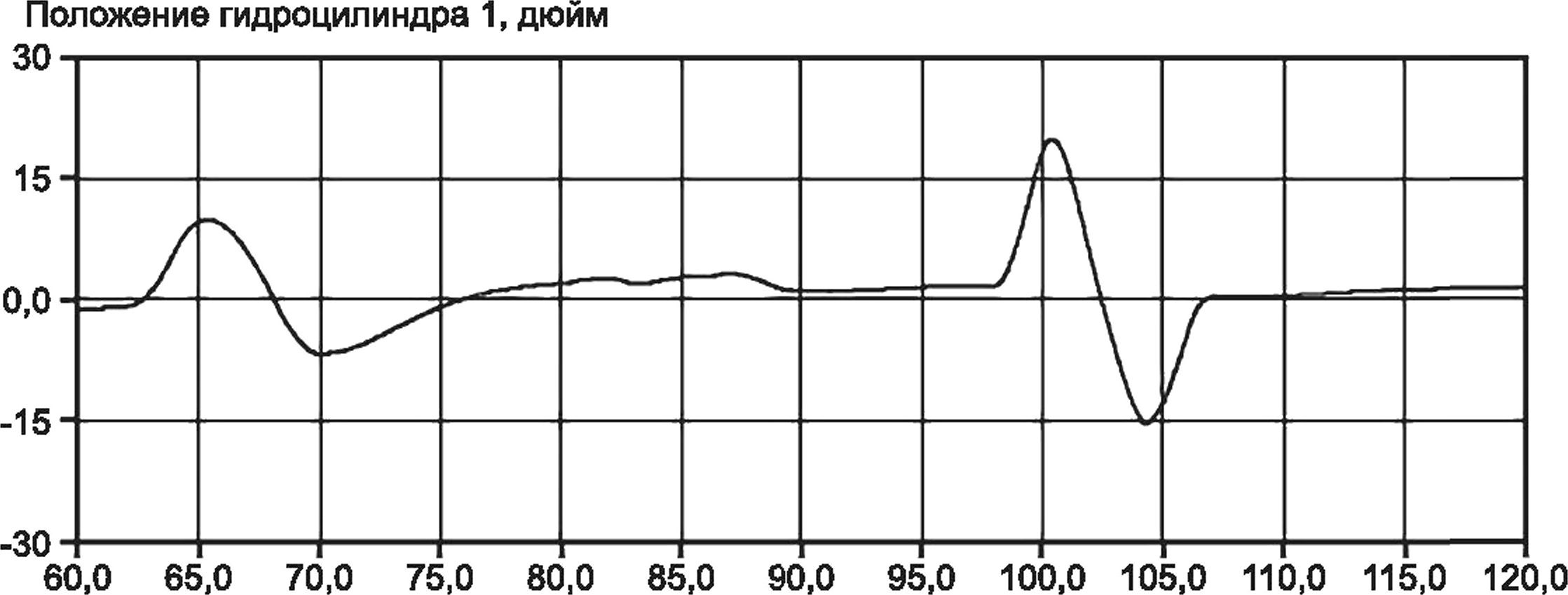
Время, с
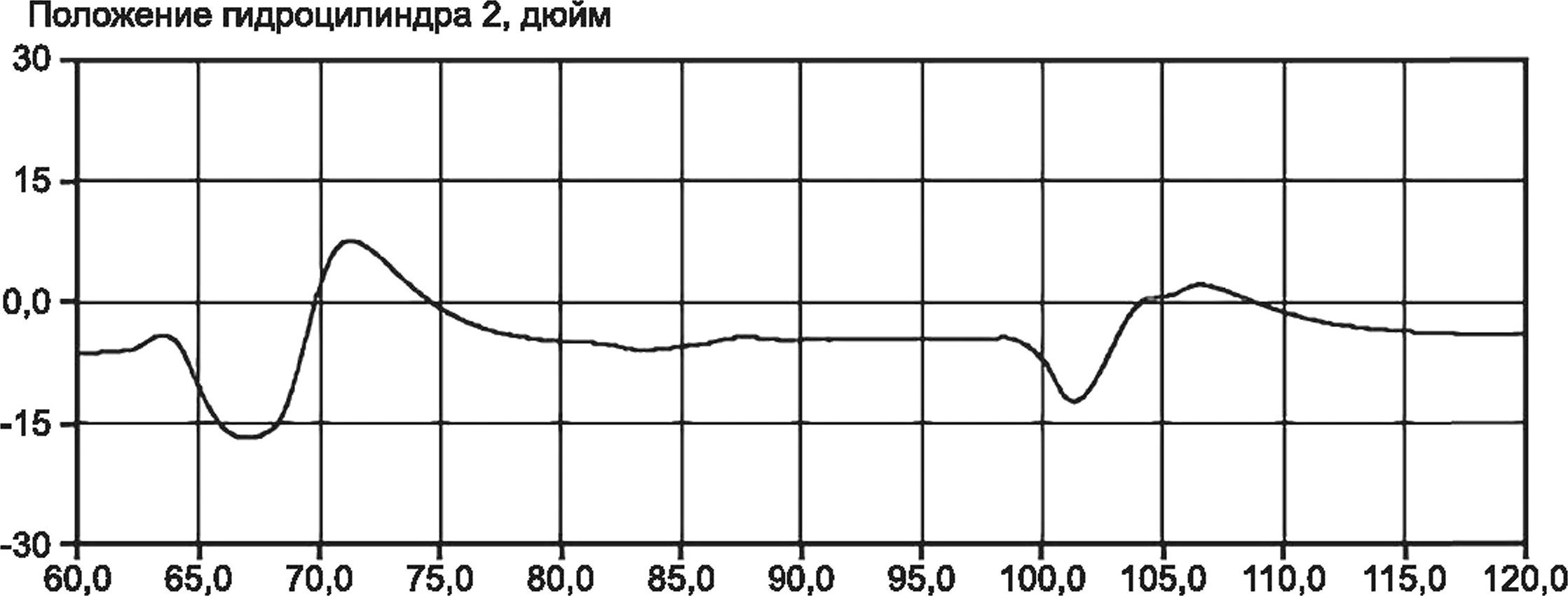
Время, с

Время, с
Рисунок 16 — Реакция положения гидроцилиндров 1—3 на входные сигналы углового ускорения
55
ГОСТ Р 70893—2023
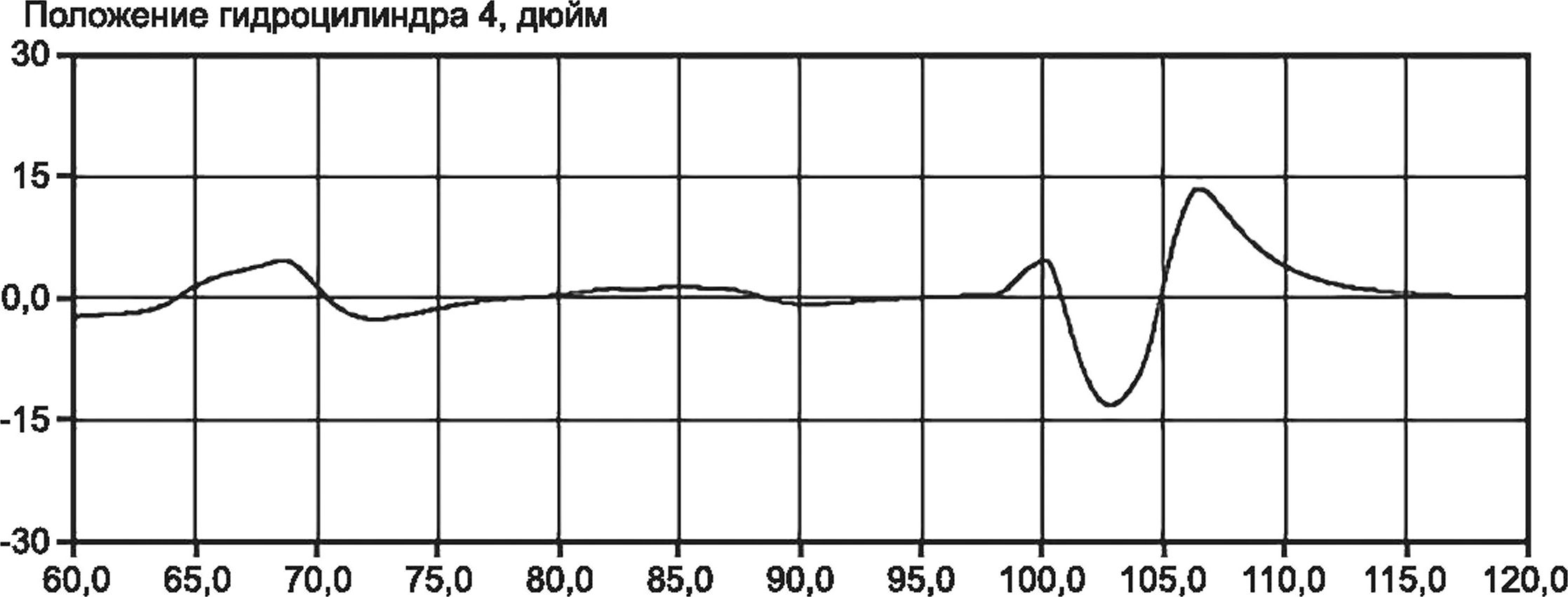
Время, с

Время, с
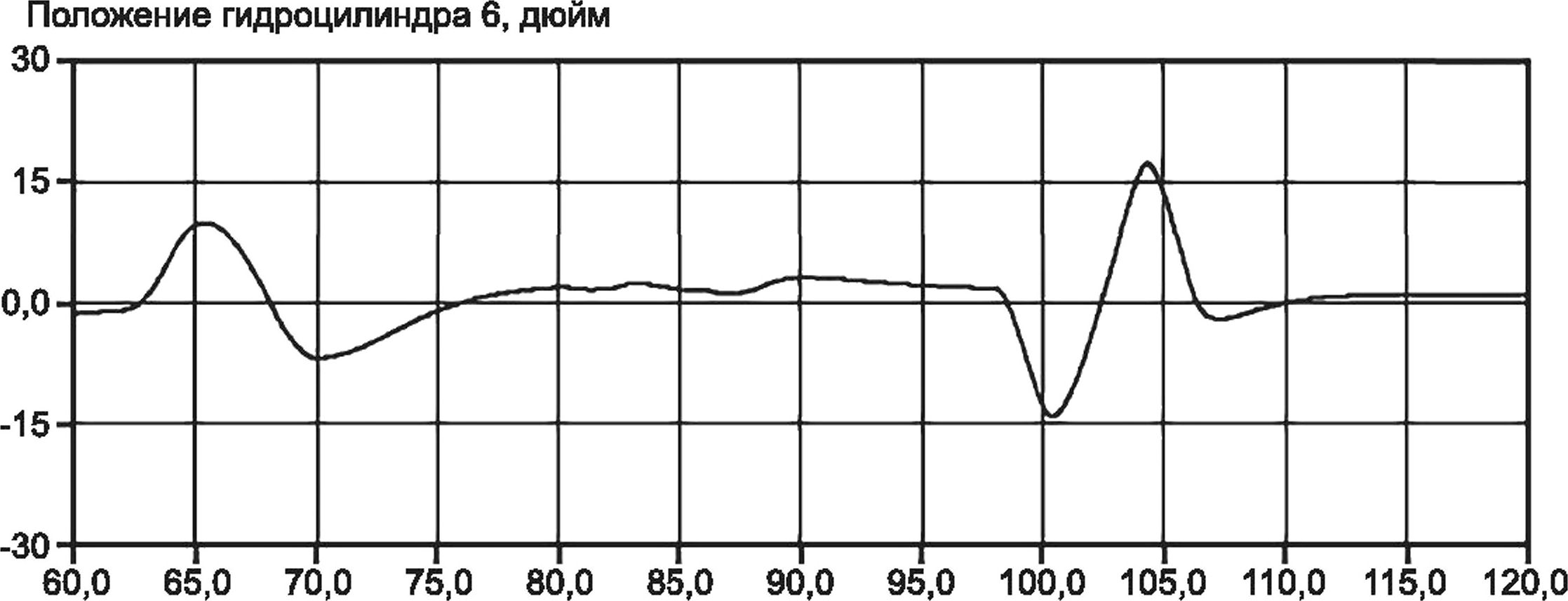
Время, с
Рисунок 17 — Реакция положения гидроцилиндров 4—6 на входные сигналы углового ускорения
7.5 Точность воспроизведения акселерационных воздействий. Частотный критерий
7.5.1 Цель: Объективное измерение частотной характеристики всей системы подвижности с учетом перекрестного влияния заданных степеней свободы.
7.5.2 Выполнение: Для проведения данного испытания с генератора сигналов в систему подвижности вводится конкретный тест-сигнал, как показано на рисунке 18 («переключатель» находится в
56
ГОСТ Р 70893—2023
нижнем положении). Во время испытания система подвижности стимулируется сигналом, аналогичным выходному сигналу с имитатора динамики полета в тренажере.
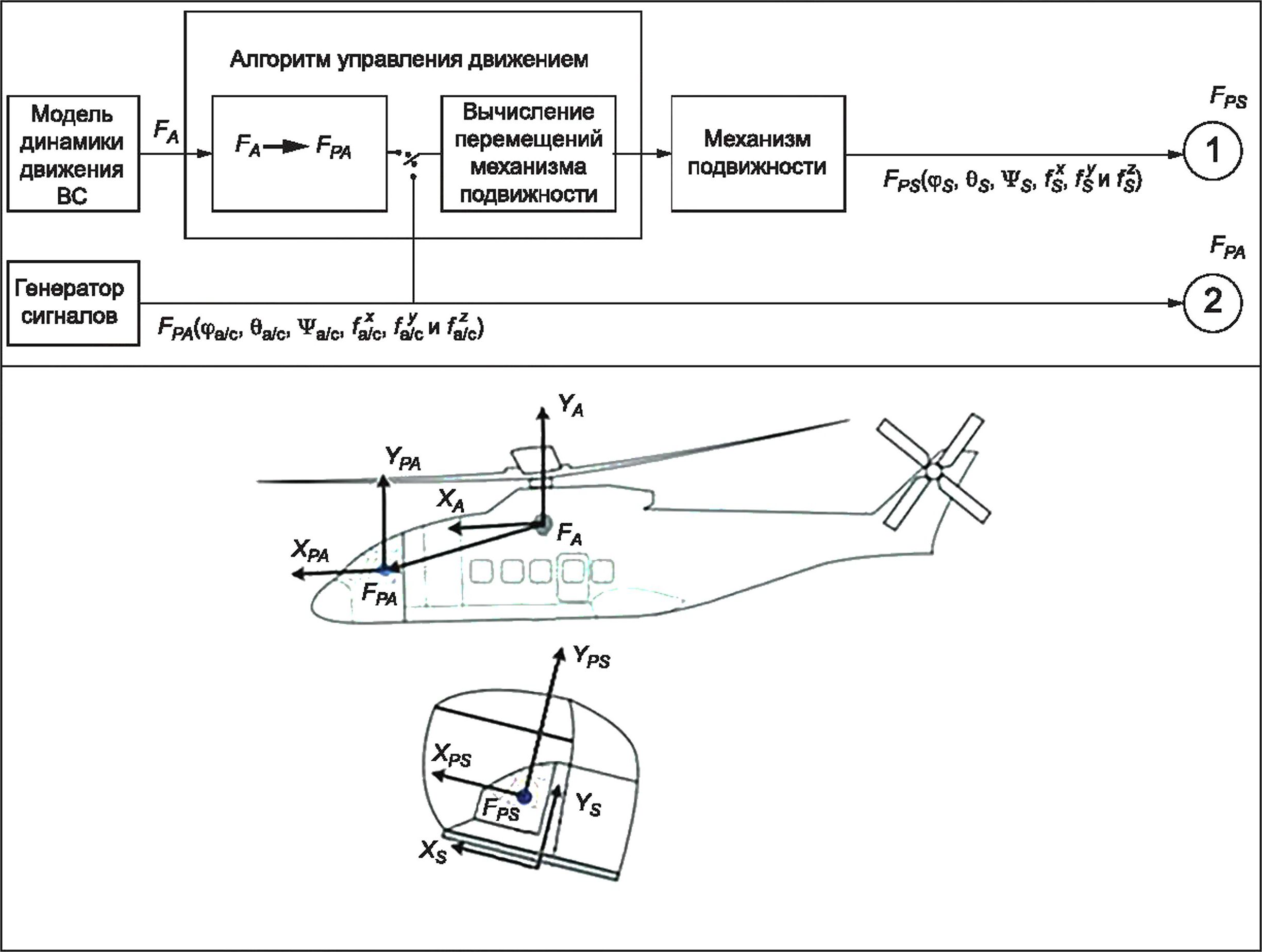
Рисунок 18 — Преобразование выходного сигнала модели динамики полета ВС в сигнал управления подвижной платформой
Тестовый сигнал представляет переменные состояния FpA ((ра/с, 0а/с, va/c> /а/с /а/с и -^а/с)’ К0Т0Рые определены следующим образом:
Амплитуды входных сигналов по перегрузке
В каналах перегрузки входной сигнал определяют следующим уравнением с использованием амплитуд А, приведенных в таблице 50
/а^(0=4 5|П(т0. (2)
Амплитуды входных сигналов по вращательным степеням свободы
Для входных сигналов вращения соотношения между угловым положением, угловой скоростью и угловым ускорением представлены в таблице 51, а соответствующие амплитуды — в таблице 52. Эти уравнения действительны только для частоты со в рад/с. Указанные переменные должны соответствовать обычно используемым в конкретной системе воспроизведениям акселерационных воздействий. То есть, если изготовитель системы подвижности использует угловую скорость вместо углового ускорения, необходимо генерировать соответствующие входные сигналы.
57
ГОСТ Р 70893—2023
Таблица 50 — Амплитуды входных сигналов по перегрузке
Номер частотного сигнала | Частота, рад/с | Частота, Гц | Амплитуда А, м/с2 |
1 | 0,100 | 0,0159 Гц | 1,00 |
2 | 0,158 | 0,0251 Гц | 1,00 |
3 | 0,251 | 0,0399 Гц | 1,00 |
4 | 0,398 | 0,0633 Гц | 1,00 |
5 | 0,631 | 0,1004 Гц | 1,00 |
6 | 1,000 | 0,1591 Гц | 1,00 |
7 | 1,585 | 0,251 Гц | 1.00 |
8 | 2,512 | 0,399 Гц | 1,00 |
9 | 3,981 | 0,633 Гц | 1,00 |
10 | 6,310 | 1,004 Гц | 1,00 |
11 | 10,000 | 1,591 Гц | 1,00 |
12 | 15,849 | 2,515 Гц | 1,00 |
Таблица 51 — Соотношения между угловым положением, угловой скоростью и угловым ускорением
Соотношения | Тангаж | Крен | Рыскание |
Угловое положение | WO =^Sin(® 0 | Фа/cW =^sin(® 0 | Va/JO =^sin(®f) |
Угловая скорость | ^а/с (0 = ^ ш COS(® 0 | Ра/с №=Аш COS(® 0 | ralc (0 = Д® cos(“ 0 |
Угловое ускорение | ^а/с (0 = ~А “2 sin(“ 0 | Ра/с (0 = ~А 0)2 sin(“ 0 | га/с (0 = "А“2 sin(® 0 |
Таблица 52 — Амплитуды входных сигналов вращения, определяемые угловым положением, угловой скоростью и угловым ускорением
Номер частотного сигнала | Частота, рад/с | Частота, Гц | Амплитуда углового положения А, град | Амплитуда угловой скорости А ®, град/с | Амплитуда углового ускорения А со2, град/с2 |
1 | 0,100 | 0,0159 | 6,000 | 0,600 | 0,060 |
2 | 0,158 | 0,0251 | 6,000 | 0,948 | 0,150 |
3 | 0,251 | 0,0399 | 3,984 | 1,000 | 0,251 |
4 | 0,398 | 0,0633 | 2,513 | 1,000 | 0,398 |
5 | 0,631 | 0,1004 | 1,585 | 1,000 | 0,631 |
6 | 1,000 | 0,1591 | 1,000 | 1,000 | 1,000 |
7 | 1,585 | 0,251 | 0,631 | 1,000 | 1,585 |
8 | 2,512 | 0,399 | 0,398 | 1,000 | 2,512 |
9 | 3,981 | 0,633 | 0,251 | 1,000 | 3,981 |
10 | 6,310 | 1,004 | 0,158 | 1,000 | 6,310 |
11 | 10,000 | 1,591 | 0,100 | 1,000 | 10,000 |
12 | 15,849 | 2,515 | 0,040 | 0,631 | 10,000 |
58
ГОСТ Р 70893—2023
Следует провести шесть независимых испытаний, по одному для каждого входного сигнал (таблица 53). Испытания 1 и 2, Зи 4, би 7, и 8 и 9 следует проводить с одним входным сигналом, одновременно измеряя два выходных сигнала. Причиной для этого является необходимость измерения прямых и перекрестных реакций при проведении одного испытания.
Таблица 53 — Матрица испытаний с номерами испытаний
Входной сигнал | Ответная реакция | |||||
Тангаж | Крен | Рыскание | Продольное движение | Поперечное движение | Движение по вертикали | |
Тангаж | 1 | — | — | 2 | — | — |
Крен | — | 3 | — | — | 4 | — |
Рыскание | — | — | 5 | — | — | — |
Продольное движение | 7 | — | — | 6 | — | — |
Поперечное движение | — | 9 | — | — | 8 | — |
Движение по вертикали | — | — | — | — | — | 10 |
Полученные частотные характеристики будут описывать зависимости между движениями ВС и движениями системы подвижности следующим образом:
1) реакция системы подвижности по тангажу в ответ на входной сигнал ускорения по тангажу;
2) реакция системы подвижности по перегрузке в продольном канале в ответ на входной сигнал ускорения по тангажу;
3) реакция системы подвижности по крену в ответ на входной сигнал ускорения по крену;
4) реакция системы подвижности по перегрузке в поперечном канале в ответ на входной сигнал ускорения по крену;
5) реакция системы подвижности по рысканию в ответ на входной сигнал ускорения по рысканию;
6) реакция системы подвижности по перегрузке в продольном канале на входной сигнал по перегрузке в поперечном канале;
7) реакция системы подвижности по угловой скорости тангажа и угловому ускорению на входной сигнал по перегрузке в поперечном канале;
8) реакция системы подвижности по перегрузке в поперечном канале на входной сигнал по перегрузке в поперечном канале;
9) реакция системы подвижности по угловой скорости крена и угловому ускорению на входной сигнал по перегрузке в поперечном канале;
10) реакция системы подвижности по перегрузке в вертикальном канале на входной сигнал по перегрузке в вертикальном канале.
7.5.3 Минимальный перечень регистрируемых параметров:
После измерения частотных характеристик для каждой степени свободы на 12 дискретных частотах, для каждой дискретной частоты входного сигнала (указанной в таблице 50), следует представить измеренное отношение модуля и фазы. Это можно сделать вручную (измеряя амплитуду и фазу на полученных графиках, подобных представленным на рисунке 19), или используя соответствующие цифровые методы.
Модуль М и фазу (р определяют следующим образом:
М (и) = амплитуда выходного сигнала и(ю)/амплитуда входного сигнала /(и)
ф (со) = Af и 360/2л, град
59
ГОСТ Р 70893—2023

Рисунок 19 — Определение амплитуд выходного сигнала и и входного сигнала / и сдвига фазы Af в интервале между и и /
Таблица 54 зарезервирована для указания допусков для выполнения испытаний по приведенной методике, уточнение которых предполагается в следующей редакции [2].
Таблица 54 — Допуски на частотный критерий
Типы АТр | Величина допуска |
IV-V и уровни R и R1 | Величина допусков для данного испытания не определена в действующей редакции [2] |
I-III и уровни S и G | Оценки не проводят |
Пример — В приведенных далее таблицах представлены границы для модуля и фазы для каждого испытания (таблицы 55—64). Данные границы не утверждены в действующей версии [2] и носят предварительный характер.
Результаты испытаний должны быть представлены на диаграммах Боде, с нанесенными границами модуля и фазы, для каждого испытания (см. рисунки 20 и 21).
Таблица 55 — Границы для модуля и фазы частотной характеристики для испытания 1
Частота, рад/с | Модуль | Фаза, град | ||
макс | мин | макс | мин | |
0,1000 | 1,0000 | 0,5830 | 2,124 | -7,061 |
0,1585 | 1,0000 | 0,5827 | 1,602 | -9,658 |
0,2512 | 1,0000 | 0,5797 | 3,076 | -14,185 |
60
Окончание таблицы 55
ГОСТ Р 70893—2023
Частота, рад/с | Модуль | Фаза, град | ||
макс | мин | макс | мин | |
0,3981 | 1,0000 | 0,5435 | 6,375 | -18,286 |
0,6310 | 1,0000 | 0,4803 | 13,359 | -19,125 |
1,0000 | 1,0000 | 0,4408 | 18,153 | -14,888 |
1,5850 | 1,0755 | 0,4044 | 18,200 | -13,063 |
2,5120 | 1,1653 | 0,3805 | 18,300 | -23,504 |
3,9810 | 1,1761 | 0,3481 | 18,339 | -33,079 |
6,3100 | 1,2282 | 0,3110 | 16,701 | -37,583 |
10,0000 | 1,2972 | 0,2607 | 8,964 | -48,343 |
15,8490 | 1,2974 | 0,2526 | -3,000 | -70,541 |
Таблица 56 — Границы для модуля и фазы частотной характеристики для испытания 2
Частота, рад/с | Модуль, м/град | Фаза, град | ||
макс | мин | макс | мин | |
0,1000 | 0,050 | 0,000 | 180,000 | -90,000 |
0,1585 | 0,050 | 0,000 | 153,181 | -116,819 |
0,2512 | 0,050 | 0,000 | 126,044 | -143,956 |
0,3981 | 0,050 | 0,000 | 99,016 | -170,984 |
0,6310 | 0,047 | 0,000 | 71,996 | -198,004 |
1,0000 | 0,038 | 0,000 | 45,000 | -225,000 |
1,5850 | 0,027 | 0,000 | 18,181 | -251,819 |
2,5120 | 0,021 | 0,000 | -8,956 | -278,956 |
3,9810 | 0,021 | 0,000 | -35,984 | -305,984 |
6,3100 | 0,021 | 0,000 | -63,004 | -333,004 |
10,0000 | 0,021 | 0,000 | -90,000 | -360,000 |
15,8490 | 0,021 | 0,000 | -116,819 | -386,819 |
Таблица 57 — Границы для модуля и фазы частотной характеристики для испытания 3
Частота, рад/с | Модуль, м/град | Фаза, град | ||
макс | мин | макс | мин | |
0,1000 | 1,000 | — | — | — |
1,1585 | 1,000 | 0,002 | 238,809 | 0,000 |
0,2512 | 1,000 | 0,012 | 218,808 | 0,000 |
0,3981 | 1,000 | 0,042 | 193,142 | 0,000 |
0,6310 | 1,000 | 0,104 | 160,237 | 0,000 |
1,0000 | 1,000 | 0,199 | 123,919 | 0,000 |
61
ГОСТ Р 70893—2023
Окончание таблицы 57
Частота, рад/с | Модуль, м/град | Фаза, град | ||
макс | мин | макс | мин | |
1,5850 | 1,000 | 0,307 | 91,470 | 0,000 |
2,5120 | 1,000 | 0,398 | 65,983 | 0,000 |
3,9810 | 1,000 | 0,426 | 44,115 | 0,000 |
6,3100 | 1,007 | 0,394 | 25,551 | -11,747 |
10,0000 | 1,104 | 0,358 | 10,422 | -32,346 |
15,8490 | 1,132 | 0,344 | -4,276 | -61,569 |
Таблица 58 — Границы для модуля и фазы частотной характеристики для испытания 4
Частота, рад/с | Модуль, м/град | Фаза, град | ||
макс | мин | макс | мин | |
0,1000 | 0,1800 | 0,0001 | 290,00 | 70,00 |
0,1585 | 0,1800 | 0,0001 | 263,00 | 44,00 |
0,2512 | 0,1800 | 0,0001 | 236,00 | 18,00 |
0,3981 | 0,1800 | 0,0001 | 209,00 | -8,00 |
0,6310 | 0,1800 | 0,0001 | 182,00 | -34,00 |
1,0000 | 0,0895 | 0,0001 | 155,00 | -60,00 |
1,5850 | 0,0447 | 0,0001 | 128,00 | -86,00 |
2,5120 | 0,0221 | 0,0001 | 101,00 | -112,00 |
3,9810 | 0,0110 | 0,0001 | 74,00 | -138,00 |
6,3100 | 0,0110 | 0,0001 | 47,00 | -164,00 |
10,0000 | 0,0110 | 0,0001 | 20,00 | -190,00 |
15,8490 | 0,0110 | 0,0001 | -7,00 | -216,00 |
Таблица 59 — Границы для модуля и фазы частотной характеристики для испытания 5
Частота, рад/с | Модуль, м/град | Фаза, град | ||
макс | мин | макс | мин | |
0,1000 | 1,0000 | — | — | — |
0,1585 | 1,0000 | 0,0000 | 205,571 | 0,000 |
0,2512 | 1,0000 | 0,0002 | 184,672 | 0,000 |
0,3981 | 1,0000 | 0,0020 | 162,452 | 0,000 |
0,6310 | 1,0000 | 0,0100 | 137,846 | 0,000 |
1,0000 | 1,0000 | 0,0358 | 111,264 | 0,000 |
1,5850 | 1,0000 | 0,1574 | 84,075 | 0,000 |
2,5120 | 1,0000 | 0,2748 | 57,893 | 0,000 |
3,9810 | 1,0000 | 0,3434 | 34,559 | -3,155 |
62
Окончание таблицы 59
ГОСТ Р 70893—2023
Частота, рад/с | Модуль, м/град | Фаза, град | ||
макс | мин | макс | мин | |
6,3100 | 1,0000 | 0,3672 | 15,671 | -17,260 |
10,0000 | 1,0000 | 0,3819 | -0,257 | -35,691 |
15,8490 | 1,0000 | 0,3321 | -21,476 | -61,278 |
Таблица 60 — Границы для модуля и фазы частотной характеристики для испытания 6
Частота, рад/с | Модуль, м/град | Фаза, град | ||
макс | мин | макс | мин | |
0,1000 | 1,0000 | 0,4983 | 0,000 | -6,728 |
0,1585 | 1,0000 | 0,5571 | 0,000 | -9,993 |
0,2512 | 1,0000 | 0,5464 | 0,000 | -16,133 |
0,3981 | 1,0000 | 0,4905 | 0,000 | -33,732 |
0,6310 | 1,0000 | 0,3581 | 2,116 | -62,645 |
1,0000 | 1,0000 | 0,1000 | 6,427 | -97,015 |
1,5850 | 1,0000 | 0,1000 | 88,567 | -189,130 |
2,5120 | 1,0000 | 0,1294 | 172,898 | -155,592 |
3,9810 | 1,0000 | 0,1626 | 135,606 | -87,596 |
6,3100 | 1,0000 | 0,1609 | 86,135 | -86,752 |
10,0000 | 1,0000 | 0,1206 | 63,372 | -110,460 |
15,8490 | 1,1115 | 0,0564 | 53,757 | -151,068 |
Таблица 61 — Границы для модуля и фазы частотной характеристики для испытания 7
Частота, рад/с | Модуль, м/град | Фаза, град | ||
макс | мин | макс | мин | |
0,1000 | 5,721 | 2,894 | -1,687 | -7,480 |
0,1585 | 5,715 | 3,241 | -1,921 | -9,759 |
0,2512 | 5,698 | 3,160 | -3,247 | -15,377 |
0,3981 | 5,628 | 2,846 | -1,995 | -32,297 |
0,6310 | 5,848 | 2,016 | 0,779 | -56,854 |
1,0000 | 5,662 | 1,200 | -7,696 | -78,855 |
1,5850 | 5,103 | 0,411 | -26,388 | -114,064 |
2,5120 | 4,042 | 0,143 | -39,054 | -155,006 |
3,9810 | 2,903 | 0,047 | -70,614 | -176,185 |
6,3100 | 1,693 | 0,015 | -113,010 | -193,390 |
10,0000 | 0,832 | 0,005 | -154,536 | -208,439 |
15,8490 | 0,370 | 0,002 | -184,930 | -238,245 |
63
ГОСТ Р 70893—2023
Таблица 62 — Границы для модуля и фазы частотной характеристики для испытания 8
Частота, рад/с | Модуль, м/град | Фаза, град | ||
макс | мин | макс | мин | |
0,1000 | 1,0000 | 0,3103 | 0,000 | -8,465 |
0,1585 | 1,0961 | 0,3355 | 0,000 | -12,366 |
0,2512 | 1,0979 | 0,3144 | 0,000 | -19,548 |
0,3981 | 1,0988 | 0,2631 | 0,000 | -30,681 |
0,6310 | 1,0882 | 0,1724 | 0,000 | -48,655 |
1,0000 | 1,0532 | 0,1000 | 27,399 | -83,909 |
1,5850 | 1,0000 | 0,1000 | 102,943 | -148,567 |
2,5120 | 1,0000 | 0,1200 | 135,772 | -150,148 |
3,9810 | 1,0000 | 0,3247 | 117,522 | -99,978 |
6,3100 | 1,0000 | 0,4448 | 62,714 | -51,655 |
10,0000 | 1,0000 | 0,3429 | 42,305 | -79,292 |
15,8490 | 1,0368 | 0,1885 | 30,545 | -122,581 |
Таблица 63 — Границы для модуля и фазы частотной характеристики для испытания 9
Частота, рад/с | Модуль, м/град | Фаза, град | ||
макс | мин | макс | мин | |
0,1000 | 6,279 | 1,993 | 178,49 | 172,43 |
0,1585 | 6,279 | 2,105 | 179,91 | 167,21 |
0,2512 | 6,279 | 2,049 | 179,57 | 160,23 |
0,3981 | 6,269 | 1,925 | 178,84 | 149,61 |
0,6310 | 6,265 | 1,630 | 177,62 | 133,20 |
1,0000 | 6,263 | 1,043 | 174,32 | 110,65 |
1,5850 | 5,601 | 0,486 | 163,13 | 67,11 |
2,5120 | 4,593 | 0,204 | 152,69 | 22,48 |
3,9810 | 2,954 | 0,081 | 108,60 | 0,62 |
6,3100 | 1,715 | 0,032 | 70,73 | -16,13 |
10,0000 | 0,899 | 0,013 | 30,13 | -27,50 |
15,8490 | 0,414 | 0,005 | -1,96 | -53,85 |
Таблица 64 — Границы для модуля и фаз частотной характеристики для испытания 10
Частота, рад/с | Модуль, м/град | Фаза, град | ||
макс | мин | макс | мин | |
0,1000 | 1,0000 | — | — | 0,000 |
0,1585 | 1,0000 | 0,0001 | 280,382 | 0,000 |
0,2512 | 1,0000 | 0,0003 | 260,530 | 0,000 |
64
Окончание таблицы 64
ГОСТ Р 70893—2023
Частота, рад/с | Модуль, м/град | Фаза, град | ||
макс | мин | макс | мин | |
0,3981 | 1,0000 | 0,0013 | 238,435 | 0,000 |
0,6310 | 1,0000 | 0,0041 | 213,109 | 0,000 |
1,0000 | 1,0000 | 0,0111 | 185,979 | 0,000 |
1,5850 | 1,0000 | 0,0246 | 154,825 | 0,000 |
2,5120 | 1,0000 | 0,0447 | 123,413 | 0,000 |
3,9810 | 1,0000 | 0,0755 | 94,706 | 0,000 |
6,3100 | 1,0000 | 0,1301 | 68,148 | 0,000 |
10,0000 | 1,0000 | 0,2043 | 40,922 | -21,483 |
15,8490 | 1,0000 | 0,2867 | 10,539 | -50,328 |

со, рад/с

Рисунок 20 — Пример результата испытания с указанием допустимых границ модуля и фазы частотной характеристики (испытание 1)
65
ГОСТ Р 70893—2023
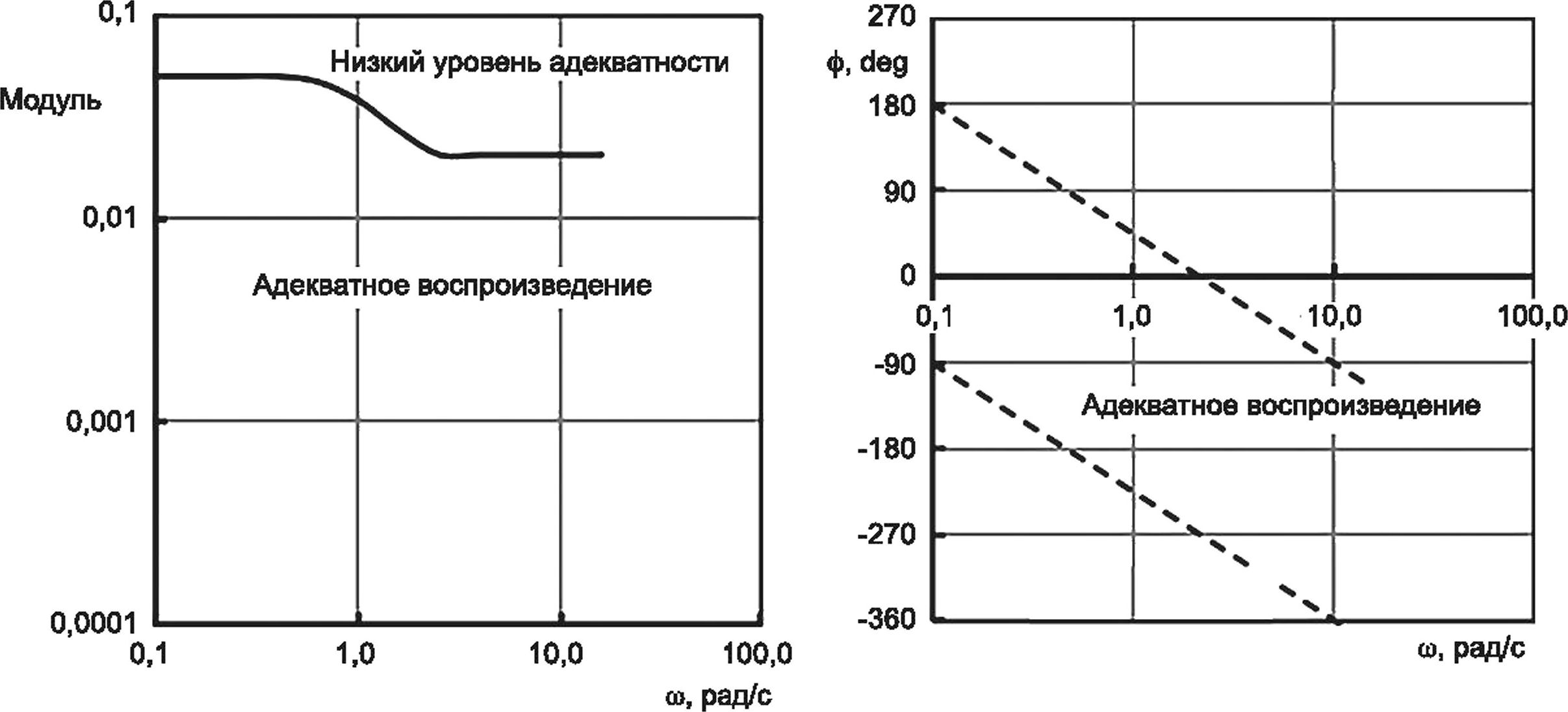
Рисунок 21 — Пример результата испытания с указанием допустимых границ модуля и фазы частотной характеристики (испытание 2)
7.6 Характерные вибрации при движении
7.6.1 Цель: Подтвердить, что характерные вибрации при движении, моделируемые на тренажере, соответствуют вибрациям в кабине имитируемого вертолета.
7.6.2 Условия полета:
1) на земле;
2) висение (в зоне влияния земной поверхности);
3) висение (вне зоны влияния земной поверхности);
4) штатный набор высоты;
5) вертикальный набор высоты;
6) горизонтальный полет на малой скорости;
7) горизонтальный полет на крейсерской скорости;
8) горизонтальный полет на высокой скорости;
9) снижение;
10) авторотация;
11) установившиеся развороты;
12) особые (характерные) условия.
7.6.3 Выполнение: Параметры характерных вибраций на тренажере сравнивают с результатами изменений этих параметров на вертолете при выполнении полета в определенных условиях. Результаты испытаний должны быть представлены в виде графика спектральной плотности мощности (СПМ), где по горизонтальной оси откладывают частоты, а по вертикальной — амплитуда. Данные вертолета и тренажера должны быть представлены в одном формате и масштабе для диапазона частот, как правило, от 3 Гц до 50 Гц. Тесты на вибрацию должны включать вибрации с частотой первой винтовой гармоники — л/оборот НВ и первой лопастной гармоники — л/оборот НВ, где л — число лопастей НВ. Требуется проводить соответствующие испытания с регистрацией их результатов, чтобы сравнить относительные амплитуды в зависимости от частоты в продольном, поперечном и вертикальном направлениях, а затем сопоставить результаты сданными вертолета. Допуски, установленные на контролируемые параметры,приведены в таблице 65.
7.6.4 Минимальный перечень регистрируемых параметров:
- спектральная плотность вертикальной мощности в зависимости от частоты по оси X;
- спектральная плотность вертикальной мощности в зависимости от частоты по оси Y;
- спектральная плотность вертикальной мощности в зависимости от частоты по оси Z.
66
ГОСТ Р 70893—2023
Таблица 65 — Допуски на характерные вибрации при движении
Типы АТр | Величина допуска |
III-V и уровни S и R | +3 Д6/-6 Дб или ±10 % номинального уровня вибрации и правильное направление |
1-11 и уровень G | Оценки не проводят |
Примечание — К особым (характерным) условиям полета относят режимы, имеющие особую важность для пилота, или условия полета, присущие конкретному типу вертолета. К таким случаям относятся эффекты, связанные с опорами шасси, эффект обледенения, режим вихревого кольца, атмосферные возмущения, а также все вибрации в связи со штатным и нештатным функционированием системы НВ и трансмиссии.
Пример — Ниже представлен пример результата данного испытания в формате графика спектральной плотности мощности в зависимости от частоты по трем осям. Данный результат не является удовлетворительным с точки зрения диапазона частот. Пример результата данного испытания в графическом виде приведен на рисунке 22.
67
ГОСТ Р 70893—2023

- контрольные данные;
-данные тренажера
Рисунок 22 — Пример результата испытания вибраций
8 Система визуализации
8.1 Непрерывная зона обзора из кабины пилотов
8.1.1 Цель: Продемонстрировать, что зона обзора из кабины экипажа является достаточной для заявляемого уровня АТр.
8.1.2 Оборудование: Теодолит или лазерный угломер.
68
ГОСТ Р 70893—2023
8.1.3 Выполнение: Испытание проводят с использованием тестового шаблона (пример приведен на рисунке 23), представляющего собой матрицу из пятиградусных контрастных четырехугольников, которая заполняет все поле зрения (все каналы). Для определения размера зоны обзора требуется подсчитать количество четырехугольников. Форма четырехугольников должна быть максимально приближена к квадрату, использование прямоугольников не допускается. В случае сомнений относительно углового размера поля обзора, необходимо использовать теодолит или другой аналогичный измерительный прибор. Измерения следует проводить из точек положений глаз каждого из пилотов. Допуски, установленные на контролируемые параметры, приведены в таблице 66.

Рисунок 23 — Пример тестового шаблона «Непрерывная (коллимированная) зона обзора из кабины пилотов»
8.1.4 Минимальный перечень регистрируемых параметров:
- зона обзора по вертикали;
- зона обзора по горизонтали.
Таблица 66 — Допуски при непрерывной зоне обзора из кабины пилотов
Типы АТр | Параметр | Величина допуска |
II-V и уровень S | Непрерывная зона обзора: по горизонтали | 210° |
по вертикали | 60° | |
Уровень R | Непрерывная зона обзора: по горизонтали | 180° |
по вертикали | 45° | |
I и уровень G | Зона обзора: по горизонтали | 45° |
по вертикали | 30° |
8.2 Геометрия системы визуализации. Положение изображения
8.2.1 Цель: Продемонстрировать, что геометрия системы визуализации соответствует заявляемому уровню АТр.
8.2.2 Выполнение: Испытание проводят с использованием специально разработанного испытательного шаблона. Испытательный шаблон представляет собой сетку из квадратов, имеющих угловой размер 5°, которая заполняет всю область обзора (все каналы), а также имеет дополнительные точки, расположенные с меньшим (эквивалентным заданным допускам) шагом. Необходимо продемонстрировать, что для точек положений глаз каждого из пилотов центр изображения находится в пределах указанных допусков в горизонтальной и вертикальной плоскостях. В случае сомнений относительно углового размера поля обзора, необходимо использовать теодолит или другой аналогичный измерительный прибор. Допуски, установленные на контролируемые параметры, приведены в таблице 67.
8.2.3 Минимальный перечень регистрируемых параметров: Угловые размеры
69
ГОСТ Р 70893—2023
Таблица 67 — Допуски на положение изображения
Типы АТр | Параметр | Величина допуска |
II-V и уровни R и S | Для коллимированных экранов | Для каждой точки положения глаз пилотов центр изображения должен находиться между 0° и 2° в горизонтальной плоскости с центровкой изображения относительно осевой линии вертолета и в пределах ±0,25° по вертикали |
Для экранов с прямой проекцией | Для каждой точки положения глаз пилотов центр изображения должен находиться между 0° и 10° в горизонтальной плоскости с центровкой изображения относительно осевой линии вертолета и в пределах ±0,25° по вертикали и ±0,5° по горизонтали | |
I и уровень G | Геометрия изображения не должна иметь отвлекающих внимания неоднородностей | |
Положение изображения следует проверять относительно осевой линии АТр. Если в центр изображения по вертикали внесена расчетная поправка, это должно быть указано.
8.3 Геометрия системы визуализации. Абсолютная геометрия
8.3.1 Цель: Продемонстрировать, что геометрия системы визуализации соответствует заявляемому уровню АТр. Проверка абсолютной геометрии необходима для предотвращения накопления допусков, приводящего к превышению допустимой погрешности.
8.3.2 Выполнение: Испытание проводят с использованием специально разработанного испытательного шаблона. Испытательный шаблон представляет собой сетку из квадратов, имеющих угловой размер 5°, которая заполняет всю область обзора (все каналы), а также имеет дополнительные точки, расположенные с меньшим (эквивалентным заданным допускам) шагом. Необходимо продемонстрировать, что для точек положений глаз каждого из пилотов каждая точка на пятиградусной сетке испытательного шаблона находится в пределах указанных допусков в горизонтальной и вертикальной плоскостях, относительно центральной точки изображения. В случае сомнений относительно углового размера поля обзора, необходимо использовать теодолит или другой аналогичный измерительный прибор. Допуски, установленные на контролируемые параметры, приведены в таблице 68.
8.3.3 Минимальный перечень регистрируемых параметров: Угловые размеры.
Таблица 68 — Допуски при абсолютной геометрии
Типы АТр | Величина допуска |
II-V и уровни R и S | В указанной минимальной зоне обзора все точки на сетке с шагом 5° должны находиться в пределах 3° от расчетного положения, измеренного из точек положений глаз каждого пилота, когда изображение выровнено относительно точки положения глаз пилота |
I и уровень G | Геометрия изображения не должна иметь отвлекающих внимания неоднородностей |
В системах визуализации с зоной обзора, размеры которой превышают требования к заявляемому уровню АТр, геометрия за пределами заданной требованиями зоны не должна иметь отвлекающих внимание неоднородностей.
8.4 Геометрия системы визуализации. Относительная геометрия
8.4.1 Цель: Продемонстрировать, что геометрия системы визуализации соответствует заявляемому уровню АТр.
8.4.2 Выполнение: Испытание проводят с использованием специально разработанного испытательного шаблона (пример приведен на рисунке 24). Испытательный шаблон, представляет собой сетку из квадратов, имеющих угловой размер 5°, которая заполняет всю область обзора (все каналы), а также имеет дополнительные точки, расположенные с меньшим (эквивалентным заданным допускам) шагом. Измерения допускается проводить только для точек, расположенных в наиболее важных при стандартном использовании системы визуализации зонах.
70
ГОСТ Р 70893—2023
Три зоны определены следующим образом:
Зона 1 охватывает участок от +5° до -15° по вертикали и ±80° по горизонтали;
Зона 2 охватывает участок от +10° до -25° по вертикали и ±90° по горизонтали, исключая площадь, охватываемую зоной 1;
Зона 3 охватывает участок от +20 до -40° по вертикали и ±105° по горизонтали, исключая площадь, охватываемую зонами 1 и 2.
Относительную геометрию оценивают по измерениям положения одной точки относительно другой. Допустимая ошибка представляет собой допуск, умноженный на расстояние в градусах до ближайшей точки измерения. Чтобы гарантировать, что линейность изображения не нарушена, измерения следует проводить следующим образом:
из точки положения глаз первого пилота измерить расположение каждой из видимых точек, размещенных с шагом 5° на вертикальных и горизонтальных линиях. На азимутах -15°, 0°, +30°, +60° и +85° следует измерить положение всех видимых точек, расположенных на расстоянии 1° друг относительно друга, в диапазоне от -10° по вертикали до самой нижней видимой точки;
из точки положения глаз второго пилота измерить расположение каждой из видимых точек, размещенных с шагом 5° на вертикальных и горизонтальных линиях. На азимутах-85°, -60°, -30°, 0° и +15° следует измерить положение всех видимых точек, расположенных на расстоянии 1° друг относительно друга, в диапазоне от -10° по вертикали до самой нижней видимой точки. Относительное расстояние между точками не должно превышать указанных допусков при сравнении интервалов между двумя соседними точками. Для полей обзора большего размера за пределами зоны 3 не должно быть отвлекающих внимание разрывов в изображении.
В случае сомнений относительно углового размера поля обзора, необходимо использовать теодолит или другой аналогичный измерительный прибор. Допуски, установленные на контролируемые параметры,приведены в таблице 69.
8.4.3 Минимальный перечень регистрируемых параметров: Угловые размеры
Таблица 69 — Допуски при относительной геометрии
Типы АТр | Величина допуска |
II-V и уровни R и S | Относительное положение от одной точки до другой не должно превышать: Зона 1: 0,075°/градус; Зона 2: 0,15°/градус; Зона 3: 0,2°/градус |
I и уровень G | Геометрия изображения не должна иметь отвлекающих внимания неоднородностей |
Примечание — Для данного испытания предпочтительно использование оптического устройства проверки. Этим устройством обычно является портативный измерительный прибор. Градуированная шкала прибора может содержать ось координат с отмеченной зоной допуска. Таким образом, при установке начала оси координат в каждую выбранную точку, шкала указывает, находится ли следующая точка в пределах требуемого допуска.
71
ГОСТ Р 70893—2023

8.5 Разрешающая способность
8.5.1 Цель: Продемонстрировать, что система визуализации удовлетворяет необходимым требованиям к разрешающей способности: объект, противолежащий точке глаз пилота, занимающий визуальный угол, равный 2 м угловым минутам, будет видимым и его границы будут различимы.
8.5.2 Выполнение: Наблюдения могут производиться из точки на глиссаде с трехградусным уклоном на расстоянии 2095 м от торца черной ВПП с нанесенной ограничительной разметкой белого цвета, состоящей из прямоугольников шириной 4,9 м с промежутками 1,2 м между ними. На таком расстоянии промежутки будут занимать угол, равный 2 угловым минутам, при оценке из точки положения глаз пилота. В случае применения допусков 3 или 4 мин, расстояние должно быть пересчитано соответствующим образом. Допускается применения какого-либо другого альтернативного метода оценки, однако при его использовании не следует забывать, что испытательный визуальный шаблон должен отображаться в составе визуальной сцены аэропорта и с использованием тех же самых методов генерации изображения, которые применяются для генерации визуальных сцен. Испытание следует проводить в вертикальной и горизонтальной плоскости, а также для каждого визуального канала (каждого отдельного проектора или иного устройства отображения). Размеры тестовых объектов должны быть подтверждены расчетами. Допуски, установленные на контролируемые параметры, приведены в таблице 70.
8.5.3 Минимальный перечень регистрируемых параметров: Разрешающая способность
Таблица 70 — Допуски на разрешающую способность
Типы АТр | Параметр | Величина допуска |
II-V и уровень S | Разрешающая способность | Не более 2 угловых минут |
Уровень R | Разрешающая способность | Не более 3 угловых минут |
I и уровень G | Разрешающая способность | Не более 4 угловых минут |
Примечание — Метод использования разметки входной кромки ВПП является приоритетным. Пример испытательного шаблона приведен на рисунке 25.
72
ГОСТ Р 70893—2023

Рисунок 25 — Пример испытательного шаблона для испытания разрешающей способности системы отображения
8.6 Размер точечного источника
8.6.1 Цель: Продемонстрировать, что размер точечных источников света обеспечивает правильное восприятие отдельных огней.
8.6.2 Выполнение: Для оценки размера точечных источников света используют испытательный шаблон, состоящий из расположенных в ряд источников света, модуляция между которыми различима. Испытательный шаблон состоит из одиночного ряда точечных источников света, отображенного в центре каждого визуального канала. Длину ряда следует уменьшать (масштабировать) до тех пор, пока модуляция не станет едва заметной. Для обеспечения возможности подсчета количества источников света их цвета могут чередоваться в определенной последовательности. Для измерения длины (угловой размер) ряда источников света следует использовать теодолит или другой аналогичный измерительный прибор. Испытание следует проводить как в горизонтальной, так и в вертикальной плоскости для каждого визуального канала. Допуски, установленные на контролируемые параметры, приведены в таблице 71.
8.6.3 Минимальный перечень регистрируемых параметров: Размер точечного источника света.
Таблица 71 — Допуски на размер точечного источника
Типы АТр | Параметр | Величина допуска |
II-V и уровень S | Размер точечного источника света | Не более 5 угловых минут |
I и уровни R и G | Размер точечного источника света | Не более 8 угловых минут |
Примечание — Под модуляцией подразумевается возможность определения изменения в яркости света вдоль ряда, т.е. изменения от одного точечного источника света к следующему, но это не означает, что между ними должны быть темные разрывы.
Пример — В качестве испытательного шаблона может быть использован ряд из 48 источников света, формирующий угол 4° или меньше, если это позволяет система (то есть размер точечного источника света не превышает заданных допусков). Две «Целевые планки» отображают четырехградусный угол таким образом, что в соответствии с требованиями испытания, ряд точечных источников света будет расположен между данными планками. Пример испытательного шаблона приведен на рисунке 26.
73
ГОСТ Р 70893—2023
«Целевые планки»

Рисунок 26 — Пример испытательного шаблона, используемого для проверки размера точечного источника света
8.7 Коэффициент контрастности растрового изображения поверхности
8.7.1 Цель: Продемонстрировать, что коэффициент контрастности изображения на экране соответствует заявляемому уровню АТр.
8.7.2 Выполнение: Коэффициент контрастности поверхности следует измерять с помощью растрового испытательного шаблона, заполняющего все визуальное изображение (все каналы). Испытательный шаблон должен состоять из чередующихся квадратов черного и белого цветов с угловыми размерами не более 10° (для типов II-V) или не более 5° (для типа I) с белым квадратом в центре каждого визуального канала.
Следует проводить измерения яркости белых квадратов, используя апертурный фотометр с полем зрения 1°. Яркость белых квадратов должна быть не менее 7 кд/м2. Также измеряется яркость смежных черных квадратов. Величину яркости каждого квадрата определяют серией измерений и вычисляют как среднее значение их результатов. Коэффициент контрастности составляет среднюю величину яркости белого квадрата, деленную на среднюю величину яркости черного квадрата.
Измерения следует проводить с рабочих мест каждого из пилотов и для каждого визуального канала. Допуски, установленные на контролируемые параметры, приведены в таблице 72.
8.7.3 Минимальный перечень регистрируемых параметров: Коэффициент контрастности
Таблица 72 — Допуски на коэффициент контрастности растрового изображения поверхности
Типы АТр | Параметр | Величина допуска |
II-V и уровень S | Коэффициент контрастности растрового изображения поверхности | Не менее чем 8:1 |
Уровень R | Коэффициент контрастности растрового изображения поверхности | Не менее чем 5:1 |
I и уровень G | Коэффициент контрастности растрового изображения поверхности | Не менее чем 4:1 |
При измерении коэффициента контрастности уровни общего освещения задней части кабины и кабины экипажа АТр должны быть минимальными.
Измерения следует проводить в центре квадратов, чтобы не допустить проникновения «паразитного» света в измерительный прибор. Пример испытательного шаблона приведен на рисунке 27.
74
ГОСТ Р 70893—2023

0°
Рисунок 27 — Пример испытательного шаблона для определения коэффициента контрастности изображения на экране
8.8 Коэффициент контрастности точечного источника света
8.8.1 Цель: Продемонстрировать, что коэффициент контрастности точечных источников света в системе визуализации соответствует заявляемому уровню АТр.
8.8.2 Выполнение: Испытание будет визуально различаться в зависимости от того, являются ли точечные источники света каллиграфическими (векторными) или растровыми. При проведении испытания используют демонстрационную модель или испытательный шаблон. Измерения проводят с помощью апертурного фотометра с полем зрения 1°.
Для каллиграфических систем испытательный шаблон должен состоять из множества каллиграфических точечных источников света, которые едва касаются друг друга, с целью заполнить область размером, по крайней мере, 1°. Для растровых систем испытательный шаблон должен состоять из множества точечных источников света, которые едва касаются друг друга, с целью заполнить область размером, по крайней мере, 1°. В отличие от каллиграфических систем, в растровой системе это приведет к непрерывному квадрату, и отдельные источники света не будут видны.
Коэффициентом контрастности является отношение величины яркости источников света к величине яркости черного фона. При измерении яркости фона область из источников света должна находиться вне зоны обзора фотометра. Измерения следует проводить с рабочих мест каждого из пилотов и для каждого визуального канала. Допуски, установленные на контролируемые параметры, приведены в таблице 73.
8.8.3 Минимальный перечень регистрируемых параметров: Коэффициент контрастности точечных источников света.
Таблица 73 — Допуски на коэффициент контрастности точечного источника света
Типы АТр | Параметр | Величина допуска |
II-V и уровень S | Коэффициент контрастности точечного источника света | Не менее чем 25:1 |
Уровень R | Коэффициент контрастности точечного источника света | Не менее чем 10:1 |
I и уровень G | Коэффициент контрастности точечного источника света | Не менее чем 8:1 |
Во время проведения испытания уровень общего освещения кабины должен быть минимальным. Пример испытательного шаблона приведен на рисунке 28.
75
ГОСТ Р 70893—2023
Массив 40*40 точечных источников света
Черная поверхность
Рисунок 28 — Пример испытательного шаблона, состоящего из массива точечных источников света, для определения коэффициента контрастности точечного источника света
8.9 Яркость точечного источника света
8.9.1 Цель: Продемонстрировать, что яркость точечных источников света соответствует заявляемому уровню АТр.
8.9.2 Выполнение: Испытание будет визуально различным в зависимости от того, являются ли точечные источники света каллиграфическими (векторными) или растровыми. При проведении испытания используют демонстрационную модель или испытательный шаблон. Измерения проводят с помощью апертурного фотометра с полем зрения Г.
Для каллиграфических систем испытательный шаблон должен состоять из множества каллиграфических точечных источников света, которые едва касаются друг друга, с целью заполнить область размером, по крайней мере, 1°. Для растровых систем испытательный шаблон должен состоять из множества точечных источников света, которые едва касаются друг друга, с целью заполнить область размером, по крайней мере, 1°. В отличие от каллиграфических систем, в растровой системе это приведет к непрерывному квадрату и отдельные источники света не будут видны.
Измерения следует проводить с рабочих мест каждого из пилотов и для каждого визуального канала.
Допуски, установленные на контролируемые параметры, приведены в таблице 74.
8.9.3 Минимальный перечень регистрируемых параметров: Яркость точечного источника.
Таблица 74 — Допуски на яркость точечного источника света
Типы АТр | Параметр | Величина допуска |
II-V и уровень S | Яркость точечного источника света | Не менее чем 30 кд/м2 |
Уровень R | Яркость точечного источника света | Не менее чем 20 кд/м2 |
I и уровень G | Оценки не проводят | |
Во время проведения испытания уровень общего освещения кабины должен быть минимальным. Пример испытательного шаблона приведен на рисунке 29.
76
ГОСТ Р 70893—2023
Массив 40М0 точечных источников света
Черная поверхность
Рисунок 29 — Пример испытательного шаблона, состоящего из массива точечных источников света, для определения яркости точечного источника света
8.10 Яркость поверхности
8.10.1 Цель: Продемонстрировать, что яркость изображения на экране соответствует заявляемому уровню АТр.
8.10.2 Выполнение: Яркость поверхности следует измерять с помощью растрового испытательного шаблона, заполняющего все визуальное изображение (все каналы), используя апертурный фотометр с полем зрения 1°. Испытательный шаблон должен состоять из чередующихся квадратов черного и белого цветов с угловыми размерами не более 5° с белым квадратом в центре каждого визуального канала. Измерения следует проводить с рабочих мест каждого из пилотов и для каждого визуального канала. Допуски, установленные на контролируемые параметры, приведены в таблице 75.
8.10.3 Минимальный перечень регистрируемых параметров: Яркость поверхности.
Таблица 75 — Допуски на яркость поверхности
Типы АТр | Параметр | Величина допуска |
II-V и уровень S | Яркость поверхности | Не менее чем 20 кд/м2 |
Уровень R | Яркость поверхности | Не менее чем 14 кд/м2 |
I и уровень G | Оценки не проводят | |
Примечание — Точечные источники света не применяются.
Пример — Во время проведения испытания уровень общего освещения кабины должен быть минимальным. Пример испытательного шаблона приведен на рисунке 30.
77
ГОСТ Р 70893—2023

Рисунок 30 — Пример испытательного шаблона для проверки яркости изображения на экране
8.11 Уровень черного и последовательная контрастность
8.11.1 Цель: Продемонстрировать, что система визуализации может отображать достаточно черную сцену и последовательная контрастность соответствует заявляемому уровню АТр.
8.11.2 Выполнение: Для проведения испытания используют апертурный фотометр с полем зрения 1° и чувствительностью 0,001 кд/м2. Фотометр должен быть установлен неподвижно и направлен в центральную часть каждого из визуальных каналов. Все проекторы должны быть выключены, и в кабине должна быть создана максимально возможная темнота. Следует снять основные показания оставшегося окружающего освещения экрана. Затем следует включить проекторы и отобразить «залитую» черным цветом область, вторично снять показания и зафиксировать разницу между ними. Полученная разность и будет величиной уровня черного. Последовательной контрастностью является отношение уровня яркости изображения на экране, полученного в ходе выполнения испытания (см. 8.10), к уровню черного, найденному в данном испытании. При проведении испытания следует настроить чувствительность фотометра на максимально возможную точность. Допуски, установленные на контролируемые параметры, приведены в таблице 76.
8.11.3 Минимальный перечень регистрируемых параметров:
- интенсивность черного;
- последовательная контрастность.
Таблица 76 — Допуски на уровень черного и последовательную контрастность
Типы АТр | Параметр | Величина допуска |
II-V и уровни S и R | Интенсивность черного | Яркость черного многоугольника — яркость фона < 0,015 кд/м2 |
Последовательная контрастность | Яркость белого многоугольника / (яркость черного многоугольника — яркость фона) > 2000:1 | |
I и уровень G | Оценки не проводят | |
Примечание — Испытание обычно проводят только для светоклапанных проекторов (например, LCoS-проекторов). Трехлучевые проекторы CRT-типа, в соответствии с принципом их работы, как правило, соответствуют минимальным требованиям для заявляемого уровня АТр.
Пример:
Замеренный уровень яркости с включенными проекторами = 0,014 кд/м2
Замеренный уровень яркости с выключенными проекторами = 0,003 кд/м2
Уровень черного = 0,014 - 0,003 = 0,011 кд/м2
Яркость поверхности = 24,3 кд/м2
Коэффициент последовательной контрастности = 24,3/0,011 = 2209:1
78
ГОСТ Р 70893—2023
8.12 Размытость движения
8.12.1 Цель: Продемонстрировать, что размытость движения соответствует допуску.
8.12.2 Выполнение: Испытательный шаблон представляет собой решетку, состоящую из пяти полос яркого белого цвета и уменьшающихся по ширине черных зазоров между ними. Диапазон ширины черных зазоров должен выходить за пределы требуемого различимого зазора выше и ниже с шагом 1 угловая минута. Ширина ярких белых полос должна быть в 4 раза больше ширины черных зазоров, чтобы избежать временных искажений. Шаблон должен вращаться со скоростью 107с. Для проведения испытания по двум осям следует использовать два набора квадратов, один вращающийся по курсу, а второй по тангажу. Ряд стационарных чисел определяет размер зазоров между полосами. Наблюдая за вращением шаблонов, необходимо определить минимальные различимые расстояния между полосами и сравнить их с допусками. Измерения следует проводить с рабочих мест каждого из пилотов и для каждого визуального канала. Допуски, установленные на контролируемые параметры, приведены в таблице 77.
8.12.3 Минимальный перечень регистрируемых параметров: Угловой размер зазоров между полосами.
Таблица 77 — Допуски на размытость движения
Типы АТр | Параметр | Величина допуска |
II-V и уровни S и R | Размытость движения | Модуляция между белыми полосами должна быть видимой с зазорами, составляющими 3 угловые минуты или меньше, при вращении шаблона со скоростью 107с |
I и уровень G | Оценки не проводят | |
Примечание — Испытание обычно проводят только для светоклапанных проекторов (например,LCoS-проекторов). У трехлучевых проекторов CRT-типа, в соответствии с принципом их работы, размытость движения чрезвычайно мала. Пример испытательного шаблона приведен на рисунке 31.

Рисунок 31 — Пример испытательного шаблона для проверки размытости движения
79
ГОСТ Р 70893—2023
8.13 Спекл-тест
8.13.1 Цель: Определить количество спеклов (шумов), образованных проекционной системой. Спекл эффект, образующийся благодаря когерентному свету лазерных проекторов, не должен превышать допустимого уровня.
8.13.2 Выполнение: Измерение коэффициента контрастности спекла (шума) проводят с помощью испытательных шаблонов и специального измерительного оборудования (CCD-камеры). Испытательный шаблон однородного освещения (с постоянным уровнем серого) устанавливают таким образом, чтобы он занимал все поле зрения. Его точная величина не важна для измерений. Испытательный шаблон должен быть восприимчив к белому, красному, зеленому и синему освещению. Контрастность растра измеряется с помощью CCD-камеры, установленной в расчетной точке (находящейся посередине между точками положения глаз КВС и второго пилота). Горизонтальное и вертикальное разрешение измерительного оборудования должно составлять, как минимум, 1 угловую минуту на оптическую пару линией. Допуски, установленные на контролируемые параметры, приведены в таблице 78.
8.13.3 Минимальный перечень регистрируемых параметров: Среднее квадратическое изменение яркости.
Таблица 78 — Допуски при спекл-тесте
Типы АТр | Параметр | Величина допуска |
II-V и уровень S | Контрастность текстуры | менее 10% |
I и уровни R и G | Оценки не проводят | |
Примечание — Обычно это испытание требуется проводить только для лазерных проекторов.
Пример — В оптических системах спекл — это яркое поле, образованное взаимной интерференцией частично когерентных лучей. Поле меняется в зависимости от мельчайших изменений лучей света, освещенности поверхностей, положения наблюдателя относительно освещенной поверхности и оптических свойств наблюдателя (например, человеческого глаза). Пример спекл-теста приведен на рисунке 32.

Рисунок 32 — Зеленое (слева) и красное (справа) поля спекла
8.14 Уровень черного при использовании для подготовки моделируемых очков ночного видения (ОНВ) (только для устройства EFVS типа 3)
8.14.1 Цель: Продемонстрировать, что уровень черного при использовании для подготовки моделируемых очков ночного видения соответствует допуску.
80
ГОСТ Р 70893—2023
8.14.2 Выполнение: Для проведения испытания используют апертурный фотометр с полем зрения 1° и чувствительностью 0,001 кд/м2. Данное испытание следует проводить с нормально работающими проекторами обзора внекабинной обстановки. При проведении этого испытания инфракрасные проекторы должны быть выключены. Если для моделирования обзора внекабинной обстановки и очков ночного видения используется только один проектор, испытание следует проводить именно с таким проектором, работающим в режиме ОНВ, т.е. с использованием соответствующих фильтров. Фотометр должен быть установлен неподвижно и направлен в центральную часть каждого из визуальных каналов. Все проекторы должны быть выключены, и в кабине должна быть создана максимально возможная темнота. Следует снять основные показания оставшегося окружающего освещения экрана. После этого следует включить проекторы обзора внекабинной обстановки, чтобы отобразился черный многоугольник, вторично снять показания и зафиксировать разницу между этими показаниями и данными об уровне окружающего освещения экрана. При проведении испытания следует настроить чувствительность фотометра на максимально возможную точность. Допуски, установленные на контролируемые параметры, приведены в таблице 79.
8.14.3 Минимальный перечень регистрируемых параметров: Яркость черного многоугольника.
Таблица 79 — Допуски на уровень черного при использовании для подготовки моделируемых очков ночного видения
Типы АТр | Параметр | Величина допуска |
II-V и уровни S и R | Яркость черного многоугольника | <0,001 кд/м2 |
I и уровень G | Оценки не проводят |
8.15 Яркость точечного источника при использовании для подготовки моделируемых очков ночного видения (ОНВ) (только для устройства EFVS типа 3)
8.15.1 Цель: Продемонстрировать, что яркость точечных источников при использовании для подготовки моделируемых очков ночного видения соответствует допуску.
8.15.2 Выполнение: Данное испытание следует проводить с нормально работающими инфракрасными проекторами. При проведении этого испытания проекторы обзора внекабинной обстановки должны быть выключены. Если для моделирования обзора внекабинной обстановки и для работы с ОНВ используется только один проектор, испытание следует проводить именно с этим проектором, работающим в режиме ОНВ, т.е. с использованием соответствующих фильтров. Точечные источники света должны быть представлены в виде матрицы, образующей квадрат. Для растровых систем точечные источники должны перекрываться таким образом, чтобы образованный квадрат был сплошным (не должно быть видно отдельных источников света). Допуски, установленные на контролируемые параметры, приведены в таблице 80.
8.15.3 Минимальный перечень регистрируемых параметров: Яркость точечного источника.
Таблица 80 — Допуски на яркость точечного источника при использовании для подготовки моделируемых очков ночного видения
Типы АТр | Параметр | Величина допуска |
II-V и уровни S и R | Яркость точечного источника | Не менее 10 кд/м2 |
I и уровень G | Оценки не проводят | |
8.16 Статическое выравнивание
8.16.1 Цель: Продемонстрировать, что система индикации на лобовом стекле выровнена с визуальным изображением.
8.16.2 Выполнение: Линия визирования системы индикации на лобовом стекле должна совпадать с центром изображения испытательного шаблона в пределах диаметра точечного источника света. В случае сомнения в том, что линия визирования не выходит за пределы диаметра точечного источника света, для проверки необходимо использовать теодолит или другой аналогичный измерительный прибор. Альтернативно испытание может быть проведено с использованием фото- или видеоаппаратуры.
81
ГОСТ Р 70893—2023
При проведении испытания система индикации должна формировать изображение, содержащее маркер центра линии визирования. Допуски, установленные на контролируемые параметры, приведены в таблице 81.
8.16.3 Минимальный перечень регистрируемых параметров: Отсутствие выхода линии визирования ИнЛС за пределы точечного источника света.
Таблица 81 — Допуски на статическое выравнивание
Типы АТр | Параметр | Величина допуска |
II-V и уровни S и R | Выравнивание | ±6 угловых минут |
I и уровень G | Оценки не проводят | |
Требование по выравниванию должно соблюдаться относительно пилота, выполняющего полет. Пример испытательного шаблона приведен на рисунке 33.

Рисунок 33 — Пример сетки сферического испытательного шаблона
8.17 Индикация параметров систем вертолета
8.17.1 Цель: Продемонстрировать, что ИнЛС адекватно функционирует во всех режимах полета.
8.17.2 Выполнение: Данное испытание основано на оценке всех функций, доступных в системе индикации на лобовом стекле, использование которых согласовано. Допуски, установленные на контролируемые параметры, приведены в таблице 82.
Таблица 82 — Допуски на индикацию параметров систем вертолета
Типы АТр | Величина допуска |
II-V и уровень S и R | Оценки проводят |
I и уровень G | Оценки не проводят |
Следует представить заявление о возможностях системы и продемонстрировать эти возможности.
8.18 Пространственное положение вертолета согласно ИнЛС по сравнению с индикатором положения АТр (тангаж и крен по горизонту)
8.18.1 Цель: Продемонстрировать, что пространственное положение вертолета в системе индикации на лобовом стекле соответствует индикации на приборах АТр.
8.18.2 Выполнение: В режиме полета, изменяя положение в пространстве (по крену и тангажу), необходимо наблюдать соответствие между авиационными приборами и индикацией на лобовом стекле,
82
ГОСТ Р 70893—2023
демонстрируемой совместно с визуальной сценой. Оценку следует проводить по положению зрительных компонентов во время испытания; абсолютно точное соответствие не требуется, но не должно быть никаких вводящих в заблуждение искажений. Также оценка должна быть дана видимому горизонту, относительно которого работает система индикации на лобовом стекле, чтобы избежать спутывания его индикации с возвышениями рельефа местности и другими топографическими особенностями. Допуски, установленные на контролируемые параметры, приведены в таблице 83.
8.18.3 Минимальный перечень регистрируемых параметров:
- угол тангажа по приборам;
- угол крена по приборам;
- угол тангажа по ИнЛС;
- угол крена по ИнЛС.
Таблица 83 — Допуски на пространственное положение вертолета согласно ИнЛС по сравнению с индикатором положения АТр
Типы АТр | Параметр | Величина допуска |
II-V и уровни S и R | Угол тангажа | ±1° |
Угол крена | ±1° | |
I и уровень G | Оценки не проводят | |
Требование по выравниванию должно соблюдаться относительно пилота, выполняющего полет.
8.19 Регистрационное испытание
8.19.1 Цель: Продемонстрировать соответствие между индикацией системы технического зрения с расширенными возможностями визуализации (EFVS) и изображением за окном кабины (визуальной сценой).
8.19.2 Условия полета: Точка взлета и захода на посадку на высоте 60 м над уровнем земли.
8.19.3 Выполнение: Это испытание обычно проводится в автоматическом режиме, с вертолетом в посадочной конфигурации на высоте 60 м над уровнем земли. Второй точкой испытания является точка взлета. Демонстрируемые изображения должны наблюдаться из номинальной точки глаз пилота, с целью проверки того, что выравнивание между двумя изображениями соответствует требованиям. Испытание может проводиться с использованием фото- или видеоаппаратуры. Допуски, установленные на контролируемые параметры, приведены в таблице 84.
8.19.4 Минимальный перечень регистрируемых параметров: Степень корреляции между изображениями.
Таблица 84 — Допуски при регистрационном испытании
Типы АТр | Величина допуска |
II-V и уровни S и R | Оценки проводят |
I и уровень G | Оценки не проводят |
8.20 Дальность видимости на ВПП и калибровка видимости при использовании системы EFVS
8.20.1 Цель: Продемонстрировать правильное представление диапазона видимости системы усовершенствованного отображения в полете.
8.20.2 Условия полета: В полете.
8.20.3 Выполнение: Данное испытание проводят во время захода на посадку. Видимый диапазон системы EFVS должен соответствовать установленным условиям видимости. Визуальная сцена может быть отключена, для лучшего наблюдения сцены системы EFVS. Допуски, установленные на контролируемые параметры, приведены в таблице 85.
8.20.4 Минимальный перечень регистрируемых параметров: Видимость.
83
ГОСТ Р 70893—2023
Таблица 85 — Допуски на дальность видимости на ВПП и калибровку видимости при использовании системы EFVS
Типы АТр | Величина допуска |
II-V и уровни S и R | Изображение системы EFVS представляет вид с высоты 350 м при дальности видимости на ВПП 1600м (1 статутная миля), включая правильную интенсивность света |
I и уровень G | Оценки не проводят |
8.21 Эффекты, связанные с тепловым переходом в EFVS
8.21.1 Цель: Продемонстрировать эффекты, связанные с тепловым переходом в EFVS.
8.21.2 Выполнение: Уверенность в правильности моделирования тепловых эффектов на инфракрасном изображении во время перехода от дня к ночи. Допуски, установленные на контролируемые параметры,приведены в таблице 86.
Таблица 86 — Допуски на эффекты, связанные с тепловым переходом в EFVS
Типы АТр | Величина допуска |
II-V и уровни S и R | Оценки проводят |
I и уровень G | Оценки не проводят |
8.22 Видимый участок земли
8.22.1 Цель: Продемонстрировать, что участок земли, видимый пилоту при заходе на посадку по приборам, соответствует видимому участку земли из кабины имитируемого вертолета.
8.22.2 Условия полета: Балансировка в посадочной конфигурации на высоте шасси 30 м над зоной приземления на глиссаде при установке дальности видимости на ВПП 300 м или 350 м.
8.22.3 Выполнение: Выбор ВПП с полной разметкой и освещением и указание для нее следующих данных:
- высоты пересечения глиссады и входного торца ВПП;
- угол а наклона глиссады.
Кроме того, следует использовать и следующие исходные данные от изготовителя вертолета:
- расчетное положение точки глаз пилота;
- угол отсечки кабины;
- расположение основной опоры шасси (нижняя точка колеса);
- скорость захода на посадку;
- расположение глиссадной антенны системы захода на посадку по приборам;
- типичный вес вертолета при посадке;
- угол тангажа в момент нахождения вертолета на посадочной глиссаде при высоте расположения колеса 30 м над зоной приземления.
Необходимо установить дальность видимости на ВПП 300 м, либо 350 м, сбалансировать вертолет в посадочной конфигурации на глиссаде на высоте 30 м по радиовысотомеру.
Нужно вычислить следующие параметры:
- ближнюю границу видимого участка земли;
- дальнюю границу видимого участка земли;
- положение точки глаз пилота.
Следует графически представить положение вертолета, ближней и дальней границ видимого участка земли на схеме выбранной ВПП, на которой указаны положения огней захода на посадку, огней осевой линии ВПП, огней кромок ВПП и огней входного торца ВПП.
Следует выполнять полет по глиссаде и «заморозить» вертолет на высоте 30 м по радиовысотомеру либо выбрать заранее вычисленное положение. Необходимо проверить корректность угла тангажа вертолета, поскольку ближняя граница видимого участка земли очень чувствительна даже к незначительным изменениям тангажа. Допуски, установленные на контролируемые параметры, приведены в таблице 87, расчеты содержания видимого участка земли — на рисунке 34.
84
ГОСТ Р 70893—2023

Рисунок 34 — Расчеты содержания видимого участка земли
Таблица 87 — Допуски на видимый участок земли
Типы АТр | Параметр | Величина допуска |
II-V и уровни S и R | Ближняя граница видимости | Должно быть видно правильное количество огней приближения в расчетном видимом участке земли |
Дальняя граница видимости | ±20 % от расчетного видимого участка земли | |
1 и уровень G | Оценки не проводят | |
Примечание — Испытание предназначено для оценки составляющих, которые влияют на точность визуальной сцены, представленной пилоту на высоте принятия решения при заходе на посадку по приборам. Эти составляющие включают в себя:
- дальность видимости на ВПП либо видимость;
- точность моделирования наклона глиссады и курсового радиомаяка (положение и наклон) инструментальной системы посадки по приборам;
- массу, конфигурацию и скорость, характерные для точки, находящейся в пределах области эксплуатационных режимов для нормального захода на посадку и посадки;
- показания радиовысотомера.
В АТр должны быть видны те входные огни ВПП, которые должны быть видны согласно расчетам.
Если используется неоднородный туман, то в расчет видимости наклонной дальности, используемой для вычисления параметров видимого участка земли, должно быть включено вертикальное изменение горизонтальной видимости и его описание.
В QTG должен быть указан источник данных, т.е. опубликованная высота принятия решения, используемые аэропорт и ВПП, расположение глиссадой антенны системы посадки по приборам (в аэропорту и на вертолете), исходная точка положения глаз пилота, угол отсечки кабины экипажа и так далее, которые используются для точных расчетов видимого участка земли.
85
ГОСТ Р 70893—2023
8.23 Производительность системы: день, сумерки, ночь
8.23.1 Цель: Продемонстрировать, что система визуализации имеет производительность, достаточную для отображения пригодной для обучения сцены.
8.23.2 Выполнение: Визуальное установление того, что система визуализации может отображать необходимое число полигонов (многоугольников), точечных источников света и объектов, движущихся одновременно. Движущиеся объекты во время данного испытания должны перемещаться с шестью степенями свободы. Все точечные источники света, полигоны и движущиеся объекты должны воспроизводиться одновременно. Полигоны (многоугольники) и точечные источники света должны отображаться в составе типовой визуальной сцены и, для обеспечения возможности их подсчета, быть собраны в матрицы (группы матриц). Допуски, установленные на контролируемые параметры, приведены в таблице 88.
8.23.3 Минимальный перечень регистрируемых параметров:
- количество текстурированных поверхностей;
- количество движущихся объектов;
- количество точечных источников света.
Таблица 88 — Допуски на производительность системы
Типы АТр | Величина допуска |
II-V и уровень S | Не менее 10000 видимых текстурированных поверхностей, 5000 точечных источников света, 16 движущихся объектов |
Уровень R | Не менее 6000 видимых текстурированных поверхностей, 5000 точечных источников света, 16 движущихся объектов |
I и уровень G | Не менее 6000 видимых текстурированных поверхностей, 1000 точечных источников света |
9 Система имитации акустических эффектов
9.1 Общие положения
Диапазон 1/3-октавной полосы частот.
Каждый диапазон 1/3-октавной полосы частот характеризуется ее центром и частотами отсечки (см. рисунок 35). Такие полосы частот часто нумеруют от полосы #1 (центральная частота 1,25 Гц) до полосы #43 (центральная частота 20000 Гц) и обычно идентифицируют по центральным частотам.
В таблице 89 приведена сводка нумерации полос, номинальные центральные частоты и значения частот отсечки для 1/3-октавных диапазонов:
Таблица 89 — Сводка нумерации полос
Номер 1/3-октавной полосы | Нижняя частота отсечки, Гц | Центральная частота, Гц | Верхняя частота отсечки, Гц |
17 | 44,7 | 50 | 56,2 |
18 | 56,2 | 63 | 70,8 |
19 | 70,8 | 80 | 89,1 |
20 | 89,1 | 100 | 112 |
21 | 112 | 125 | 141 |
22 | 141 | 160 | 178 |
23 | 178 | 200 | 224 |
24 | 224 | 250 | 282 |
25 | 282 | 315 | 355 |
86
Окончание таблицы 89
ГОСТ Р 70893—2023
Номер 1/3-октавной полосы | Нижняя частота отсечки, Гц | Центральная частота, Гц | Верхняя частота отсечки, Гц |
26 | 355 | 400 | 447 |
27 | 447 | 500 | 562 |
28 | 562 | 630 | 708 |
29 | 708 | 800 | 891 |
30 | 891 | 1000 | 1122 |
31 | 1122 | 1250 | 1413 |
32 | 1413 | 1600 | 1778 |
33 | 1778 | 2000 | 2239 |
34 | 2239 | 2500 | 2818 |
35 | 2818 | 3150 | 3548 |
36 | 3548 | 4000 | 4467 |
37 | 4467 | 5000 | 5623 |
38 | 5623 | 6300 | 7079 |
39 | 7079 | 8000 | 8913 |
40 | 8913 | 10000 | 11220 |
41 | 11220 | 12220 | 14130 |
42 | 14130 | 16000 | 17780 |

Центральная частота, Гц
Рисунок 35 — Пример спектрограммы с использованием 1/3-октавных полос
87
ГОСТ Р 70893—2023
Установка оборудования и калибровка.
Микрофон должен располагаться на АТр точно так же, как и в реальном испытываемом вертолете в летных испытаниях при сборе данных(см. рисунок 36). Расположение микрофона должно указываться поставщиком исходных данных. Если поставщик исходных данных не указал места расположения микрофона, оборудование следует размещать рядом с правым ухом КВС, как показано в примере на рисунке 36. Кресла экипажа должны находиться в нормальной полетной конфигурации, все двери в кабину экипажа и все вентиляционные отверстия должны быть закрыты.

Рисунок 36 — Пример расположения микрофона рядом с креслом пилота
Перед проведением объективных испытаний необходимо выполнить калибровку оборудования. После того, как микрофон и звуковой анализатор откалиброваны следует замерить фоновый шум в кабине экипажа и убедиться, что его уровень ниже рекомендованного максимального фонового шума АТр. При проведении испытаний необходимо учитывать, что уровень шума системы кондиционирования и охлаждения воздуха, как правило, является неизменным. Рекомендуется выполнить ряд тестов по определению фонового шума с включенной и выключенной системой кондиционирования, а также с включенной и выключенной системой подвижности. Эти тесты выполняют с выключенной акустической системой, но с нормально функционирующими другими системами моделирования (то есть при имеющихся шумах от авионики, электрического оборудования, системы внутреннего охлаждения). Эти тесты помогут получить необходимую поправку, которую следует учитывать при сравнении результатов испытаний, зафиксированных на АТр и на реальном вертолете.
9.2 Готовность к запуску двигателя
9.2.1 Цель: Продемонстрировать, что звуки, слышимые в кабине АТр во время готовности к запуску двигателя, соответствуют звукам, слышимым в кабине вертолета.
9.2.2 Условия полета: На земле.
9.2.3 Выполнение: Установка АТр в конфигурацию, соответствующую указанному режиму полета. Использование звукового анализатора для регистрации и анализа уровней звукового давления. Время записи должно быть не менее 20 с. Микрофон должен быть размещен вблизи правого уха КВС или точки, в которой снимались показания при сборе данных летных испытаний. Допуски, установленные на контролируемые параметры, приведены в таблице 90.
88
ГОСТ Р 70893—2023
9.2.4 Минимальный перечень регистрируемых параметров: Уровни звукового давления.
Таблица 90 — Допуски при готовности к запуску двигателя
Типы АТр | Тип оценки | Величина допуска |
V | Первоначальная оценка | ±5дБ на 1/3 октавной полосы |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ | |
IV | Первоначальная оценка | Субъективная оценка 1/3 октавной полосы |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ | |
III | Первоначальная оценка | Субъективная оценка измеренного общего уровня звукового давления (SPL) |
Периодическая оценка | ±3 дБ от среднего квадратического значения уровня звукового давления (SPL RMS) по сравнению с первоначальной оценкой | |
I-II | Оценки не проводят | |
Примечание — Для АТр типа V допускается несколько 1/3 октавных полос, выходящих за пределы допуска ±5дБ, но не более 2 последовательных, и в любом случае в пределах ±7дБ от утвержденных данных при условии правильного общего направления. Все испытания для АТр типов IV—V должны проводиться с использованием невзвешенного формата 1/3 октавной полосы в диапазоне, как минимум, от 50 Гц до 16 кГц. Для АТр типа III данное испытание может быть представлено как единый общий уровень звукового давления.
9.3 Работа всех двигателей на нормальном режиме малого газа
9.3.1 Цель: Продемонстрировать, что звуки, слышимые в кабине АТр в режиме малого газа со всеми работающими двигателями, соответствуют звукам, слышимым в кабине вертолета.
9.3.2 Условия полета: На земле.
9.3.3 Выполнение: Установка АТр в конфигурацию, соответствующую указанному режиму полета. Использование звукового анализатора для регистрации и анализа уровней звукового давления. Время записи должно быть не менее 20 с. Микрофон должен быть размещен вблизи правого уха КВС или точки, в которой снимались показания при сборе данных летных испытаний. Допуски, установленные на контролируемые параметры, приведены в таблице 91.
9.3.4 Минимальный перечень регистрируемых параметров: Уровни звукового давления.
Таблица 91 — Допуски при работе всех двигателей на нормальном режиме малого газа
Типы АТр | Тип оценки | Величина допуска |
V | Первоначальная оценка | ±5дБ на 1/3 октавной полосы |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ | |
IV | Первоначальная оценка | Субъективная оценка 1/3 октавной полосы |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ |
89
ГОСТ Р 70893—2023
Окончание таблицы 91
Типы АТр | Тип оценки | Величина допуска |
III | Первоначальная оценка | Субъективная оценка измеренного общего уровня звукового давления (SPL) |
Периодическая оценка | ±3 дБ от среднего квадратического значения уровня звукового давления (SPL RMS) по сравнению с первоначальной оценкой | |
I-II | Оценки не проводят | |
Примечание — Для АТр типа V допускается несколько 1/3 октавных полос, выходящих за пределы допуска ±5дБ, но не более двух последовательных, и в любом случае в пределах ±7дБ от утвержденных данных при условии правильного общего направления. Все испытания для АТр типов IV—V должны быть проведены с использованием невзвешенного формата 1/3 октавной полосы в диапазоне, как минимум, от 50 Гц до 16 кГц. Для АТр типа III данное испытание может быть представлено как единый общий уровень звукового давления.
9.4 Нормальный режим работы всех двигателей в полете
9.4.1 Цель: Продемонстрировать, что звуки, слышимые в кабине АТр во время готовности к запуску двигателя, соответствуют звукам, слышимым в кабине вертолета.
9.4.2 Условия полета: На земле.
9.4.3 Выполнение: Установка АТр в конфигурацию, соответствующую указанному режиму полета. Использование звукового анализатора для регистрации и анализа уровней звукового давления. Время записи должно быть не менее 20 с. Микрофон должен быть размещен вблизи правого уха КВС или точки, в которой снимались показания при сборе данных летных испытаний. Допуски, установленные на контролируемые параметры, приведены в таблице 92.
9.4.4 Минимальный перечень регистрируемых параметров: Уровни звукового давления.
Таблица 92 — Допуски при нормальном режиме работы всех двигателей в полете
Типы АТр | Тип оценки | Величина допуска |
V | Первоначальная оценка | ±5дБ на 1/3 октавной полосы |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ | |
IV | Первоначальная оценка | Субъективная оценка 1/3 октавной полосы |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ | |
III | Первоначальная оценка | Субъективная оценка измеренного общего уровня звукового давления (SPL) |
Периодическая оценка | ±3 дБ от среднего квадратического значения уровня звукового давления (SPL RMS) по сравнению с первоначальной оценкой | |
I-II | Оценки не проводят | |
Примечание — Для АТр типа V допускается несколько 1/3 октавных полос, выходящих за пределы допуска ±5дБ, но не более двух последовательных, и в любом случае в пределах ±7дБ от утвержденных данных при условии правильного общего направления. Все испытания для АТр типов IV—V должны быть проведены с использованием невзвешенного формата 1/3 октавной полосы в диапазоне, как минимум, от 50 Гц до 16 кГц. Для АТр типа III данное испытание может быть представлено как единый общий уровень звукового давления.
90
ГОСТ Р 70893—2023
9.5 Режим висения
9.5.1 Цель: Продемонстрировать, что звуки, слышимые в кабине АТр в режиме висения, соответствуют звукам, слышимым в кабине вертолета.
9.5.2 Условия полета: Висение. В зоне влияния земной поверхности. Вне зоны влияния земной поверхности.
9.5.3 Выполнение: Установка АТр в конфигурацию, соответствующую указанному режиму полета. Использование звукового анализатора для регистрации и анализа уровней звукового давления. Время записи должно быть не менее 20 с. Микрофон должен быть размещен вблизи правого уха КВС или точки, в которой снимались показания при сборе данных летных испытаний. Допуски, установленные на контролируемые параметры, приведены в таблице 93.
9.5.4 Минимальный перечень регистрируемых параметров: Уровни звукового давления.
Таблица 93 — Допуски в режиме висения
Типы АТр | Тип оценки | Величина допуска |
V | Первоначальная оценка | ±5дБ на 1/3 октавной полосы |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ | |
IV | Первоначальная оценка | Субъективная оценка 1/3 октавной полосы |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ | |
III | Первоначальная оценка | Субъективная оценка измеренного общего уровня звукового давления (SPL) |
Периодическая оценка | ±3 дБ от среднего квадратического значения уровня звукового давления (SPL RMS) по сравнению с первоначальной оценкой | |
I-II | Оценки не проводят | |
Примечание — Для АТр типа V допускается несколько 1/3 октавных полос, выходящих за пределы допуска ±5дБ, но не более двух последовательных, и в любом случае в пределах ±7дБ от утвержденных данных при условии правильного общего направления. Все испытания для АТр типов IV—V должны быть проведены с использованием невзвешенного формата 1/3 октавной полосы в диапазоне, как минимум, от 50 Гц до 16 кГц. Для АТр типа III данное испытание может быть представлено как единый общий уровень звукового давления.
9.6 Набор высоты
9.6.1 Цель: Продемонстрировать, что звуки, слышимые в кабине АТр при наборе высоты, соответствуют звукам, слышимым в кабине вертолета.
9.6.2 Условия полета: Набор высоты при выполнении полета по маршруту.
9.6.3 Выполнение: Установка АТр в конфигурацию, соответствующую указанному режиму полета. Использование звукового анализатора для регистрации и анализа уровней звукового давления. Время записи должно быть не менее 20 с. Микрофон должен быть размещен вблизи правого уха КВС или точки, в которой снимались показания при сборе данных летных испытаний. Допуски, установленные на контролируемые параметры, приведены в таблице 94.
9.6.4 Минимальный перечень регистрируемых параметров: Уровни звукового давления.
91
ГОСТ Р 70893—2023
Таблица 94 — Допуски при режиме набора высоты
Типы АТр | Тип оценки | Величина допуска |
V | Первоначальная оценка | ±5дБ на 1/3 октавной полосы |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ | |
IV | Первоначальная оценка | Субъективная оценка 1/3 октавной полосы |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ | |
III | Первоначальная оценка | Субъективная оценка измеренного общего уровня звукового давления (SPL) |
Периодическая оценка | ±3 дБ от среднего квадратического значения уровня звукового давления (SPL RMS) по сравнению с первоначальной оценкой | |
I-II | Оценки не проводят | |
Примечание — Для АТр типа V допускается несколько 1/3 октавных полос, выходящих за пределы допуска ±5дБ, но не более двух последовательных, и в любом случае в пределах ±7дБ от утвержденных данных при условии правильного общего направления. Все испытания для АТр типов IV—V должны быть проведены с использованием невзвешенного формата 1/3 октавной полосы в диапазоне, как минимум, от 50 Гц до 16 кГц. Для АТр типа III данное испытание может быть представлено как единый общий уровень звукового давления.
9.7 Полет на крейсерском режиме
9.7.1 Цель: Продемонстрировать, что звуки, слышимые в кабине АТр в полете на крейсерском режиме, соответствуют звукам, слышимым в кабине вертолета.
9.7.2 Условия полета: Крейсерский режим полета.
9.7.3 Выполнение: Установка АТр в конфигурацию, соответствующую указанному режиму полета. Использование звукового анализатора для регистрации и анализа уровней звукового давления. Время записи должно быть не менее 20 с. Микрофон должен быть размещен вблизи правого уха КВС или точки, в которой снимались показания при сборе данных летных испытаний. Допуски, установленные на контролируемые параметры, приведены в таблице 95.
9.7.4 Минимальный перечень регистрируемых параметров: Уровни звукового давления.
Таблица 95 — Допуски при полете на крейсерском режиме
Типы АТр | Тип оценки | Величина допуска |
V | Первоначальная оценка | ±5дБ на 1/3 октавной полосы |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ | |
IV | Первоначальная оценка | Субъективная оценка 1/3 октавной полосы |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ |
92
Окончание таблицы 95
ГОСТ Р 70893—2023
Типы АТр | Тип оценки | Величина допуска |
III | Первоначальная оценка | Субъективная оценка измеренного общего уровня звукового давления (SPL) |
Периодическая оценка | ±3 дБ от среднего квадратического значения уровня звукового давления (SPL RMS) по сравнению с первоначальной оценкой | |
I-II | Оценки не проводят | |
Примечание — Для АТр типа V допускается несколько 1/3 октавных полос, выходящих за пределы допуска ±5дБ, но не более двух последовательных, и в любом случае в пределах ±7дБ от утвержденных данных при условии правильного общего направления. Все испытания для АТр типов IV—V должны быть проведены с использованием невзвешенного формата 1/3 октавной полосы в диапазоне, как минимум, от 50 Гц до 16 кГц. Для АТр типа III данное испытание может быть представлено как единый общий уровень звукового давления.
9.8 Установившийся разворот
9.8.1 Цель: Продемонстрировать, что звуки, слышимые в кабине АТр во время установившегося разворота, соответствуют звукам, слышимым в кабине вертолета.
9.8.2 Условия полета: Крейсерский режим полета.
9.8.3 Выполнение: Установка АТр в конфигурацию, соответствующую указанному режиму полета. Использование звукового анализатора для регистрации и анализа уровней звукового давления. Время записи должно быть не менее 20 с. Микрофон должен быть размещен вблизи правого уха КВС или точки, в которой снимались показания при сборе данных летных испытаний. Допуски, установленные на контролируемые параметры, приведены в таблице 96.
9.8.4 Минимальный перечень регистрируемых параметров: Уровни звукового давления.
Таблица 96 — Допуски на установившийся разворот
Типы АТр | Тип оценки | Величина допуска |
V | Первоначальная оценка | ±5дБ на 1/3 октавной полосы. |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ | |
IV | Первоначальная оценка | Субъективная оценка 1/3 октавной полосы |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ | |
III | Первоначальная оценка | Субъективная оценка измеренного общего уровня звукового давления (SPL) |
Периодическая оценка | ±3 дБ от среднего квадратического значения уровня звукового давления (SPL RMS) по сравнению с первоначальной оценкой | |
I-II | Оценки не проводят | |
Примечание — Для АТр типа V и уровня R (RA) допускается несколько 1/3 октавных полос, выходящих за пределы допуска ±5дБ, но не более двух последовательных, и в любом случае в пределах ±7дБ от утвержденных данных при условии правильного общего направления. Все испытания для АТр типов IV—V и уровня R (RA, RB) должны быть проведены с использованием невзвешенного формата 1/3 октавной полосы в диапазоне, как минимум, от 50 Гц до 16 кГц. Для АТр типа III и уровня R (RC) данное испытание может быть представлено как единый общий уровень звукового давления.
93
ГОСТ Р 70893—2023
9.9 Режим РСНВ
9.1.1 Цель: Продемонстрировать, что звуки, слышимые в кабине АТр в режиме РСНВ, соответствуют звукам, слышимым в кабине вертолета.
9.1.2 Условия полета: РСНВ в стабильном снижении.
9.1.3 Выполнение: Установка АТр в конфигурацию, соответствующую указанному режиму полета. Использование звукового анализатора для регистрации и анализа уровней звукового давления. Время записи должно быть не менее 20 с. Допуски, установленные на контролируемые параметры, приведены в таблице 97.
Микрофон должен быть размещен вблизи правого уха КВС или точки, в которой снимались показания при сборе данных летных испытаний.
9.1.4 Минимальный перечень регистрируемых параметров: Уровни звукового давления.
Таблица 97 — Допуски в РСНВ
Типы АТр | Тип оценки | Величина допуска |
V | Первоначальная оценка | ±5дБ на 1/3 октавной полосы |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ | |
IV | Первоначальная оценка | Субъективная оценка 1/3 октавной полосы |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ | |
III | Первоначальная оценка | Субъективная оценка измеренного общего уровня звукового давления (SPL) |
Периодическая оценка | ±3 дБ от среднего квадратического значения уровня звукового давления (SPL RMS) по сравнению с первоначальной оценкой | |
I-II | Оценки не проводят | |
Примечание — Для АТр типа V и уровня R (RA) допускается несколько 1/3 октавных полос, выходящих за пределы допуска ±5дБ, но не более двух последовательных, и в любом случае в пределах ±7дБ от утвержденных данных при условии правильного общего направления. Все испытания для АТр типов IV—V и уровня R (RA, RB) должны быть проведены с использованием невзвешенного формата 1/3 октавной полосы в диапазоне, как минимум, от 50 Гц до 16 кГц. Для АТр типа III и уровня R (RC) данное испытание может быть представлено как единый общий уровень звукового давления.
9.10 Конечный этап захода на посадку
9.10.1 Цель: Продемонстрировать, что звуки, слышимые в кабине АТр на конечном этапе захода на посадку, соответствуют звукам, слышимым в кабине вертолета.
9.10.2 Условия полета: Посадка.
9.10.3 Выполнение: Установка АТр в конфигурацию, соответствующую указанному режиму полета. Использование звукового анализатора для регистрации и анализа уровней звукового давления. Время записи должно быть не менее 20 с. Микрофон должен быть размещен вблизи правого уха КВС или точки, в которой снимались показания при сборе данных летных испытаний. Допуски, установленные на контролируемые параметры, приведены в таблице 98.
9.10.4 Минимальный перечень регистрируемых параметров: Уровни звукового давления.
94
ГОСТ Р 70893—2023
Таблица 98 — Допуски при конечном этапе захода на посадку
Типы АТр | Тип оценки | Величина допуска |
V | Первоначальная оценка | ±5дБ на 1/3 октавной полосы |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ | |
IV | Первоначальная оценка | Субъективная оценка 1/3 октавной полосы |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ | |
III | Первоначальная оценка | Субъективная оценка измеренного общего уровня звукового давления (SPL) |
Периодическая оценка | ±3 дБ от среднего квадратического значения уровня звукового давления (SPL RMS) по сравнению с первоначальной оценкой | |
I-II | Оценки не проводят | |
Примечание — Для АТр типа V и уровня R (RA) допускается несколько 1/3 октавных полос, выходящих за пределы допуска ±5дБ, но не более двух последовательных, и в любом случае в пределах ±7дБ от утвержденных данных при условии правильного общего направления. Все испытания для АТр типов IV—V и уровня R (RA, RB) должны быть проведены с использованием невзвешенного формата 1/3 октавной полосы в диапазоне, как минимум, от 50 Гц до 16 кГц. Для АТр типа III и уровня R (RC) данное испытание может быть представлено как единый общий уровень звукового давления.
9.11 Особые случаи полета
9.11.1 Цель: Продемонстрировать, что звуки, воспринимаемые в кабине АТр при различных условиях, соответствуют звукам, слышимым в кабине вертолета.
9.11.2 Условия полета: Особые случаи полета.
9.11.3 Выполнение: Установка АТр в конфигурацию, которая необходима для демонстрации конкретного звука. Ожидание установившегося состояния. Использование звукового анализатора для регистрации и анализа уровней звукового давления. Время записи должно быть не менее 20 с. Микрофон должен быть размещен вблизи правого уха КВС или точки, в которой снимались показания при сборе данных летных испытаний. Допуски, установленные на контролируемые параметры, приведены в таблице 99.
9.11.4 Минимальный перечень регистрируемых параметров: Уровни звукового давления.
Таблица 99 — Допуски при особых случаях полета
Типы АТр | Тип оценки | Величина допуска |
IV-V и уровень R (RA, RB) | Первоначальная оценка | Уровни фонового шума меньше, указанных ниже могут считаться приемлемыми: а) 70 дБ при 50 Гц; б) 55 дБ при 1000 Гц; в) 30 дБ при 16 кГц. |
Периодическая оценка | ±3 дБ на 1/3 октавной полосы по сравнению с первоначальной оценкой | |
III и уровень R(RC) | Первоначальная оценка | Субъективная оценка измеренного общего уровня звукового давления |
Периодическая оценка | ±3 дБ от среднего квадратического значения уровня звукового давления (SPL RMS) по сравнению с первоначальной оценкой | |
I-II и уровни S и G | Оценки не проводят | |
95
ГОСТ Р 70893—2023
Примечание — Для АТр типа V и уровня R (RA) допускается несколько 1/3 октавных полос, выходящих за пределы допуска ±5дБ, но не более двух последовательных, и в любом случае в пределах ±7дБ от утвержденных данных при условии правильного общего направления. Все испытания для АТр типов IV-V и уровня R (RA, RB) должны быть проведены с использованием невзвешенного формата 1/3 октавной полосы в диапазоне, как минимум, от 50 Гц до 16 кГц. Для АТр типа III и уровня R (RC) данное испытание может быть представлено как единый общий уровень звукового давления.
9.12 Фоновый шум
9.12.1 Цель: Продемонстрировать, что звуки в кабине экипажа, не являющиеся частью имитационного моделирования, не создают помех для обучения.
9.12.2 Условия полета: Крейсерский режим полета.
9.12.3 Выполнение: Запуск тренажера с выключенной системой имитации акустических эффектов. Отключение звуков приборов в кабине. Использование звукового анализатора для регистрации и анализа уровней звукового давления. Время записи должно быть не менее 20 с. По возможности запись осуществляется дистанционно без персонала в кабине в АТр. Допуски, установленные на контролируемые параметры, приведены в таблице 100.
9.12.4 Минимальный перечень регистрируемых параметров: Уровни звукового давления.
Таблица 100 — Допуски на фоновый шум
Типы АТр | Тип оценки | Величина допуска |
V | Первоначальная оценка | ±5дБ на 1/3 октавной полосы |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ | |
IV | Первоначальная оценка | Субъективная оценка 1/3 октавной полосы |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ | |
III | Первоначальная оценка | Субъективная оценка измеренного общего уровня звукового давления (SPL) |
Периодическая оценка | ±3 дБ от среднего квадратического значения уровня звукового давления (SPL RMS) по сравнению с первоначальной оценкой | |
I-II | Оценки не проводят | |
Результаты измерения фонового шума при первоначальной квалификационной оценке должны быть включены в QTG и утверждены органом по сертификации, проводившем квалификационную оценку. Все испытания для АТр типов IV должны быть проведены с использованием невзвешенного формата 1/3 октавной полосы в диапазоне, как минимум, от 50 Гц до 16 кГц (см. рисунок 37).
Для АТр типа III данное испытание может быть представлено как единый общий уровень звукового давления.
Приемлемость уровней фонового шума зависит от нормальных уровней звуков в имитируемом вертолете (см. рисунки 38 и 39). Уровни фонового шума меньше, чем указанные ниже, могут считаться приемлемыми:
а) 70 дБ при 50 Гц;
б) 55 дБ при 1000 Гц;
в) 30 дБ при 16 кГц.
96
ГОСТ Р 70893—2023

Рисунок 37 — Частота полосы 1/3 октавы, Гц
Уровень звукового давления, дБ
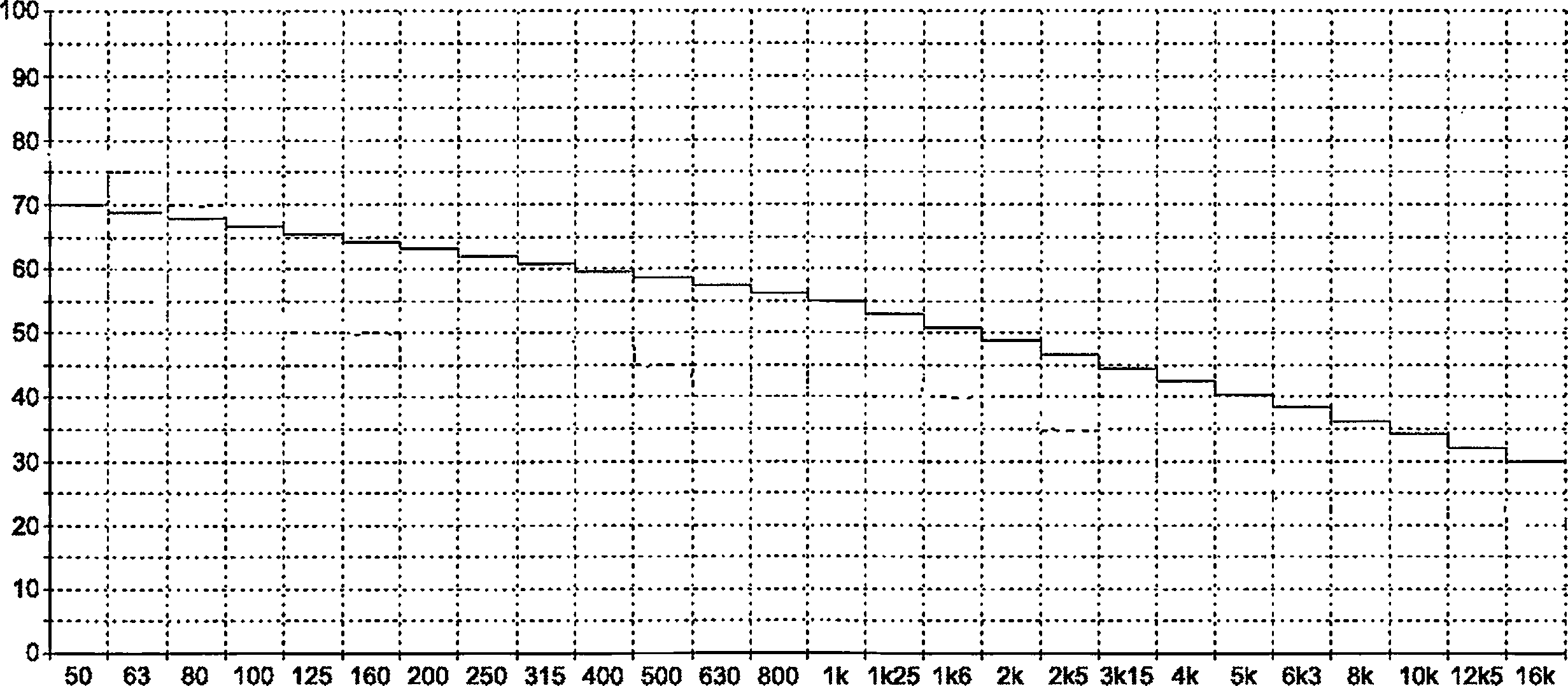
Центральная частота, Гц
Рисунок 38 — Спектрограмма рекомендуемого максимального уровня фонового шума тренажера
97
ГОСТ Р 70893—2023
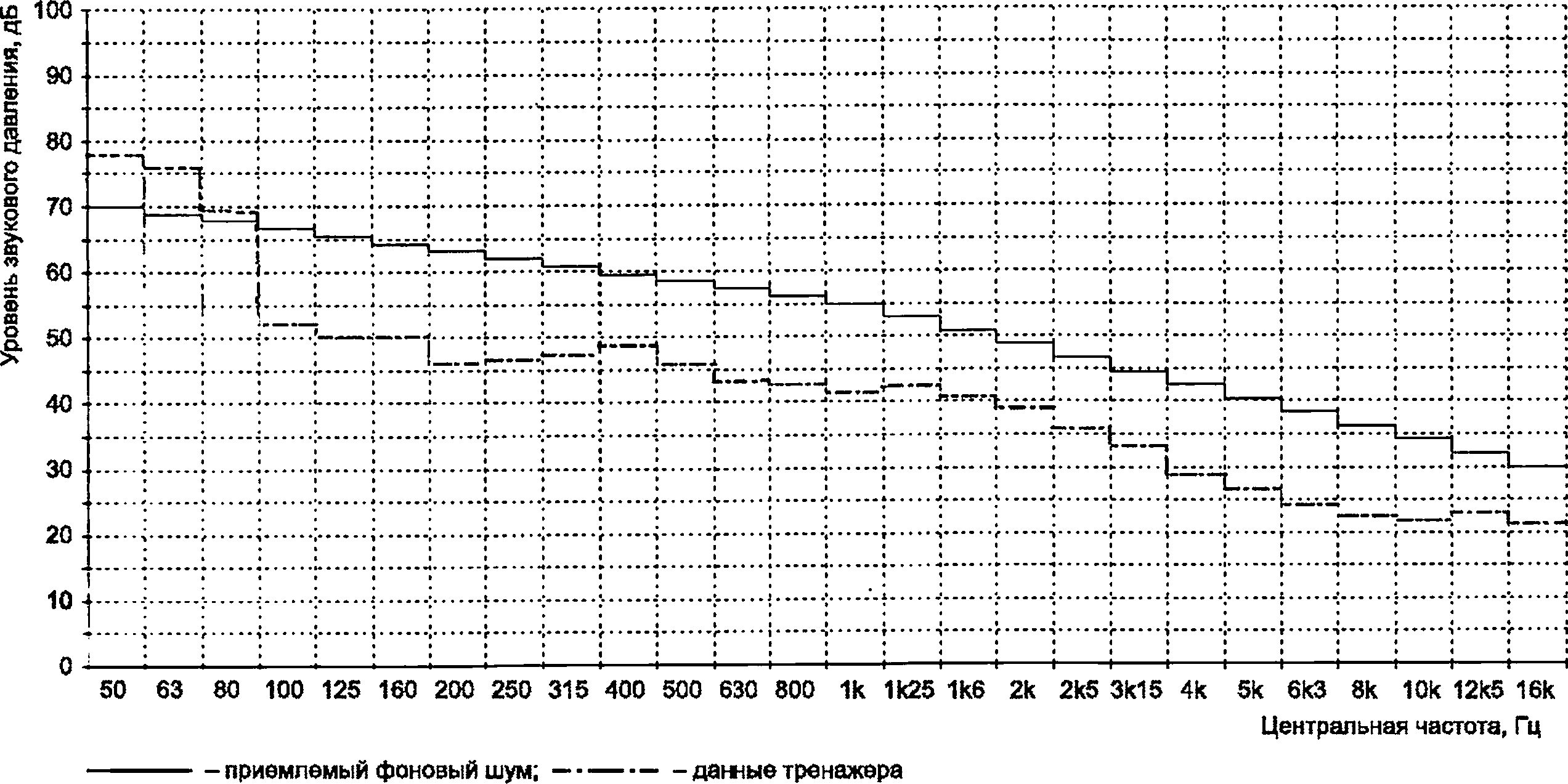
Рисунок 39 — Пример тренажера с неприемлемым уровнем фонового шума при начальной оценке
9.13 Частотная характеристика
9.13.1 Цель: Показать, что характеристики системы имитации акустических эффектов не понижаются в течение срока эксплуатации тренажера.
9.13.2 Условия полета: Крейсерский режим полета.
9.13.3 Выполнение: Запуск тренажера. Отключение звуков приборов в кабине. Подача тестового сигнала в каждый канал в широком спектре частот (см. пример на рисунке 40). Использование звукового анализатора для регистрации и анализа уровней звукового давления. Время записи должно быть не менее 20 с. По возможности запись осуществляется дистанционно без персонала в кабине в АТр. Допуски, установленные на контролируемые параметры, приведены в таблице 101.
9.13.4 Минимальный перечень регистрируемых параметров: Уровни звукового давления.
Таблица 101 —Допуски на частотную характеристику
Типы АТр | Тип оценки | Величина допуска |
IV-V и уровень R (RA, RB) | Первоначальная оценка | Оценку не проводят |
Периодическая оценка | Различие не может превышать ±5дБ по трем последовательным полосам по сравнению с первоначальной оценкой, а средняя величина абсолютных различий между результатами первоначальной и периодических оценок не может превышать 2дБ | |
III и уровень R (RC) | Первоначальная оценка | Оценку не проводят |
Периодическая оценка | ±3 дБ от среднего квадратического значения уровня звукового давления (SPL RMS) по сравнению с первоначальной оценкой | |
I-II и уровни S и G | Оценки не проводят | |
Примечание — Требуется только в случае необходимости использования результатов во время периодических оценок.
98
ГОСТ Р 70893—2023
Все испытания для АТр типов IV-V в данном разделе должны быть проведены с использованием невзвешенного формата 1/3 октавной полосы в диапазоне, как минимум, от 50 Гц до 16 кГц. Для АТр типа III это испытание должно быть проведено в трех диапазонах частот (высокий, средний и низкий диапазоны). Пример результатов начального испытания приведен на рисунке 40, пример сравнения результатов периодического и начального испытаний приведен на рисунке 41, пример соответствующих частотных характеристики периодических оценок— в таблице 102.

Центральная частота, Гц
- результат начальной квалификации
Рисунок 40 — Пример результатов испытаний частотных характеристик с использованием «розового шума»
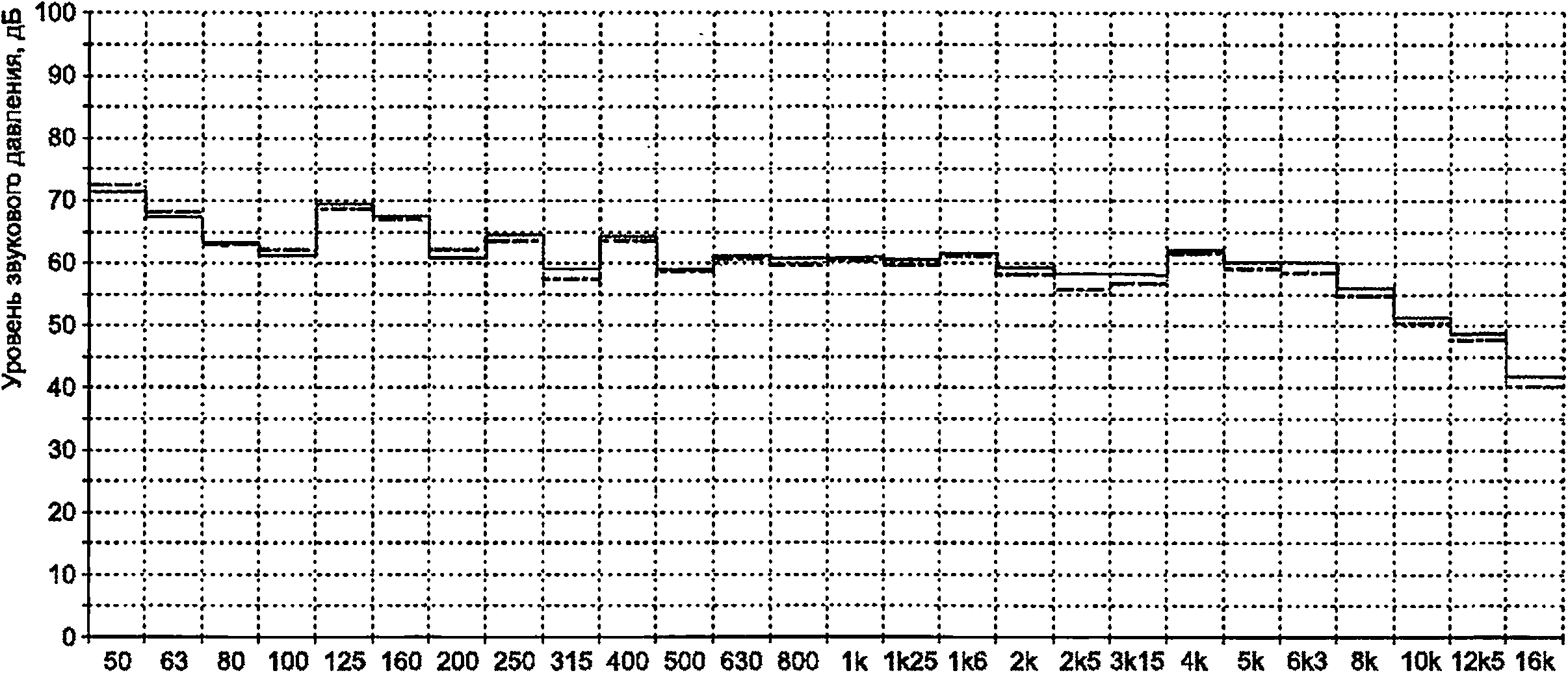
Центральная частота, Гц
--результат начальной квалификации;----данные тренажера
Рисунок 41 — Пример результатов испытаний частотных характеристик
99
ГОСТ Р 70893—2023
Таблица 102 — Пример частотных характеристик при начальной и периодической оценке
Центральная полоса частот, Гц | Результаты начальной оценки (уровень звукового давления, дБ) | Результаты периодической оценки (уровень звукового давления, дБ) | Отклонение по абсолютной величине (уровень звукового давления, дБ) |
50 | 75,0 | 73,8 | 1,2 |
63 | 75,9 | 75,6 | 0,3 |
80 | 77,1 | 76,5 | 0,6 |
100 | 78,0 | 78,3 | 0,3 |
125 | 81,9 | 81,3 | 0,6 |
160 | 79,8 | 80,1 | 0,3 |
200 | 83,1 | 84,9 | 1,8 |
250 | 78,6 | 78,9 | 0,3 |
315 | 79,5 | 78,3 | 1,2 |
400 | 80,1 | 79,5 | 0,6 |
500 | 80,7 | 79,8 | 0,9 |
630 | 81,9 | 80,4 | 1,5 |
800 | 73,2 | 74,1 | 0,9 |
1000 | 79,2 | 80,1 | 0,9 |
1250 | 80,7 | 82,8 | 2,1 |
1600 | 81,6 | 78,6 | 3,0 |
2000 | 76,2 | 74,4 | 1,8 |
2500 | 79,5 | 80,7 | 1,2 |
3150 | 80,1 | 77,1 | 3,0 |
4000 | 78,9 | 78,6 | 0,3 |
5000 | 80,1 | 77,1 | 3,0 |
6300 | 80,7 | 80,4 | 0,3 |
8000 | 84,3 | 85,5 | 1,2 |
10000 | 81,3 | 79,8 | 1,5 |
12500 | 80,7 | 80,1 | 0,6 |
16000 | 71,1 | 71,1 | 0,0 |
— | Среднее | 1,1 | — |
10 Системная интеграция. Оценка транспортной задержки
10.1 Цель: Показать соответствие корреляции сигналов и реакций систем подвижности, визуализации и индикаторов приборов с эффектами, воспринимаемыми на вертолете.
10.2 Условия полета: Тангаж, крен, рыскание.
10.3 Выполнение: Для каждой оси необходимо проводить одно отдельное испытание. Необходимо подать сигнал в систему управления и контролировать результирующие эффекты, проявляющиеся в системах подвижности, визуализации и на индикаторах приборов; показать, что недопустимые задерж-
100
ГОСТ Р 70893—2023
ки при восприятии пилотом моделируемых сигналов и эффектов отсутствуют. Допуски, установленные на контролируемые параметры, приведены в таблице 103.
10.4 Минимальный перечень регистрируемых параметров:
- продольное отклонение РЦШ;
- поперечное отклонение РЦШ;
- положение педалей путевого управления;
- общий шаг НВ;
- ускорение системы подвижности;
- сигналы системы визуализации;
- индикаторы приборов (крен, тангаж, рыскание):
- сигналы системы EFVS (при наличии).
Таблица 103 — Допуски при оценке транспортной задержки
Типы АТр | Тип задержки | Величина допуска |
III-V и уровень S | Транспортная задержка | 85 мс или менее после завершения перемещения рычага управления |
I-II и уровни R и G | 120 мс или менее после завершения перемещения рычага управления |
Если установлена система EFVS, то она должна реагировать в диапазоне ±30 мс от времени реакции системы визуализации, но не ранее реагирования системы подвижности. Время запаздывания, вносимое электронными элементами системы EFVS вертолета, следует прибавлять к 30 мс допуска перед сравнением с точкой отсчета для системы визуализации.
101
ГОСТ Р 70893—2023
Библиография
[1] Приказ Минтранса России от 8 февраля 2019 г. № 46 «Об утверждении Порядка допуска к применению тренажерных устройств имитации полета, применяемых в целях подготовки и контроля профессиональных навыков членов летных экипажей гражданских воздушных судов»
[2] Приказ Минтранса России от 12 июля 2019 г. № 229 «Об утверждении Федеральных авиационных правил «Требования к тренажерным устройствам имитации полета, применяемым в целях подготовки и контроля профессиональных навыков членов летных экипажей гражданских воздушных судов»
УДК 629.07.73:006.354
ОКС 49.020
Ключевые слова: тренажерные устройства, имитация полета вертолета, методы оценки соответствия, авиационные тренажеры
Редактор Н.А. Аргунова Технический редактор И.Е. Черепкова Корректор С.И. Фирсова Компьютерная верстка Е.А. Кондрашовой
Сдано в набор 13.11.2023. Подписано в печать 27.11.2023. Формат 60*84%. Гарнитура Ариал. Усл. печ. л. 12,09. Уч.-изд. л. 10,28.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении в ФГБУ «Институт стандартизации» , 117418 Москва, Нахимовский пр-т, д. 31, к. 2.
{kind=link}