ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ГОСТР
54418.27.1 —
2019
(МЭК 61400-27-1:2015)
УСТАНОВКИ ВЕТРОЭНЕРГЕТИЧЕСКИЕ
Часть 27-1
Общие имитационные модели ветроэнергетических установок, присоединенных к энергосистеме
(IEC 61400-27-1:2015,
Wind turbines — Part 27-1: Electrical simulation models — Wind turbines, MOD)
Издание официальное
Москва 2020
ГОСТ Р 54418.27.1—2019
Предисловие
1 ПОДГОТОВЛЕН Обществом с ограниченной ответственностью «ВИЭСХ-ВОЗОБНОВЛЯЕМЫЕ ИСТОЧНИКИ ЭНЕРГИИ» (ООО «ВИЭСХ-ВИЭ») на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК016 «Электроэнергетика»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 29 ноября 2019 г. № 1287-ст
4 Настоящий стандарт является модифицированным по отношению к международному стандарту МЭИ 61400-27-1:2015 «Установки ветроэнергетические. Часть 27-1. Электрические имитационные модели. Общие модели» (IEC 61400-27-1:2015 «Wind turbines — Part 27-1: Electrical simulation models — Wind turbines». MOD) путем изменения отдельных фраз. слов, ссылок, которые выделены в тексте курсивом, а также путем изменения его структуры для приведения в соответствие с правилами, установленными в ГОСТ 1.5 (подразделы 4.2 и 4.3).
Внесение указанных технических отклонений направлено на учет потребностей национальной экономики Российской Федерации и особенностей объекта стандартизации, характерных для Российской Федерации.
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5—2012 (пункт 3.5).
Сведения о соответствии ссылочных национальных и межгосударственных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте. приведены в дополнительном приложении ДА.
Сравнение структуры настоящего стандарта со структурой указанного международного стандарта приведено в дополнительном приложении ДБ
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (ло состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомления и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (vwvw.)
© . оформление. 2020
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии и
ГОСТ Р 54418.27.1—2019
Содержание
1 Область применения...................................................................................................................................1
2 Нормативные ссылки....................................................................................................................................2
3 Термины и определения..............................................................................................................................2
4 Обозначения ................................................................................................................................................5
5 Построение общих имитационных моделей ВЭУ......................................................................................7
5.1 Типы ветроэнергетических установок...................................................................................................7
5.2 Требования к моделям...........................................................................................................................7
5.3 Взаимосвязь имитационной модели ВЭУ с имитационными моделями ВЭС и энергосистемы.....................................................................................................................................8
5.4 Параметры/персменные моделей и начальное состояние.................................................................9
5.5 Структура общих моделей...................................................................................................................11
5.6 Каталог моделей модулей ВЭУ...........................................................................................................22
6 Проверка моделей......................................................................................................................................45
6.1 Общие положения................................................................................................................................45
6.2 Общие требования...............................................................................................................................46
6.3 Проверка реакции модели на провалы напряжения.........................................................................47
6.4 Проверка реакции модели на изменение опорных значений...........................................................50
6.5 Проверка модели защиты электрической сети..................................................................................51
Приложение А (справочное) Упрощенная модель ветроэнергетической станции....................................53
Приложение В (обязательное) Каталог типовых звеньев..........................................................................57
Приложение С (справочное) Двухпараметрическая аэродинамическая модель.....................................63
Приложение D (обязательное) Пределы возможной точности модели.....................................................68
Приложение Е (справочное) Пример составления отчета о проверке модели........................................69
Приложение F (обязательное) Цифровой фильтр низкой частоты 2-го порядка с критическим затуханием..................................................................................................71
Приложение G (справочное) Общее сопряжение программного обеспечения для применения с различными программными комплексами моделирования....................................................................................................................72
Приложение ДА (справочное) Сведения о соответствии ссылочных национальных и межгосударственных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте...............................................................................................76
Приложение ДБ (справочное) Сопоставление структуры настоящего стандарта со структурой примененного в нем международного стандарта...................................77
Библиография...............................................................................................................................................80
III
ГОСТ Р 54418.27.1—2019 (МЭК 61400-27-1:2015)
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
УСТАНОВКИ ВЕТРОЭНЕРГЕТИЧЕСКИЕ
Часть 27-1
Общие имитационные модели ветроэнергетических установок, присоединенных к энергосистеме
Wind turbines. Part 27-1. Generic simulation models of grid connected wind turbines
Дата введения — 2020—06—01
1 Область применения
Настоящий стандарт распространяется на ветроэнергетические установки (ВЭУ). присоединенные к энергосистеме, и устанавливает общие имитационные модели таких ВЭУ.
Модели предназначены, прежде всего, для оценки влияния работы ВЭУ на энергосистему, для оценки изменения выходных параметров ВЭУ при возникновении возмущений в энергосистеме и изменении параметров ветроэнергетической станции (ВЭС) с учетом возможных изменений других внешних факторов (например, скорости ветра).
Применение моделей ограничивается следующим':
- приведенные в настоящем стандарте модели ВЭУ предназначены для исследования поведения энергосистемы в переходных режимах с определением характеристик прямой последовательности основной частоты.
Примечания
1 Основной частотой является частота 50 Гц.
2 В настоящем стандарте учитывают как симметричные короткие замыкания, так и несимметричные короткие замыкания, однако для несимметричных коротких замыканий задаются только составляющие прямой последовательности;
- модели не предназначены для анализа результирующей устойчивости энергосистем;
- модели предназначены только для исследования синхронных режимов работы (взаимодействий) ВЭУ с ВЭС (другими ВЭУ в ВЭС) и энергосистемой и не предназначены для исследования явлений, происходящих в процессе самосинхронизации до достижения полной синхронизации работы ВЭУ. ВЭС и энергосистемы;
- модели не учитывают такие явления, как наличие гармонических составляющих, пульсации и другие электромагнитные эффекты (см. [1]);
- модели не включают подробные расчеты режимов короткого замыкания.
- модели не применимы для изучения энергосистем, в которых могут быть ситуации выделения на изолированную работу ВЭУ без других источников синхронной генерации;
- в моделях не учитывают динамические характеристики устройств автоматической синхронизации фазы.
Примечание — В целом динамические свойства устройств автоматической синхронизации фазы на порядок величины быстрее, чем динамические свойства устройств управления мощностью ВЭУ. С этой точки зрения влияние автоматической синхронизации фазы пренебрежимо мало для большей части энергоустановок ВЭУ;
- в модели ВЭУ не включено регулирование по частоте. Регулирование по частоте включено в модели уровня ВЭС (см., например, приложение А);
* Для оценки применимости моделей см. также 5.2.
Издание официальное
1
ГОСТ Р 54418.27.1—2019
- модели не предназначены для изучения отклонений, обусловленных изменчивостью скорости ветра во времени и пространстве, модели не включают учет таких явлений, как турбулентность, «затенение» ВЭУ, сдвиг ветра и вихревые возмущения:
- модели не предназначены для непосредственного определения значений собственных внутренних резонансных колебаний ВЭУ.
Примечание — Процессы внутренних резонансных колебаний ВЭУ существенно нелинейны, расчет собственных частот в линейном приближении является сложной задачей, и его реализация в общих моделях гложет привести к неадекватности моделей;
- модели применимы только к ВЭУ. поэтому не включают средства управления уровня ВЭС или такого дополнительного оборудования, как статические компенсаторы (SVC. STATCOM) и другие устройства. моделирование которых отнесено к моделированию ВЭС. Моделирование взаимодействия ВЭУ с устройствами управления ВЭС также отнесено к моделированию ВЭС и не включено в модели, устанавливаемые в настоящем стандарте.
Модели, устанавливаемые в настоящем стандарте, являются основой для общих динамических имитационных моделей ВЭС.
Порядок проверки модели, установленный в настоящем стандарте, применим для любых моделей ВЭУ. предназначенных для определения характеристик прямой последовательности основной частоты.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ 1494 Электротехника. Буквенные обозначения основных величин
ГОСТ 18311 Изделия электротехнические. Термины и определения основных понятий
ГОСТ 32144 Электрическая энергия. Совместимость технических средств электромагнитная. Нормы качества электрической энергии в системах электроснабжения общего назначения
ГОСТ Р 51237 Нетрадиционная энергетика. Ветроэнергетика. Термины и определения
ГОСТ Р 54418.21—2011 (МЭК 61400-21:2008) Возобновляемая энергетика. Ветроэнергетика. Установки ветроэнергетические. Часть 21. Измерение и оценка характеристик, связанных с качеством электрической энергии, ветроэнергетических установок, подключенных к электрической сети
ГОСТ Р 55589 (МЭК 60050-415:2999) Международный электротехнический словарь. Часть 415. Установки ветроэнергетическое. Системы генерирования электроэнергии
ГОСТ Р 58491 Электроэнергетика. Распределенная генерация. Технические требования к объектам генерации на базе ветроэнергетических установок
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя «Национальные стандарты» за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ 1494. ГОСТ 18311. ГОСТ 32144. ГОСТ Р 51237, ГОСТ Р 55589. [2]. а также следующие термины с соответствующими определениями:
3.1 общая имитационная модель ВЭУ (wind turbines generic simulation model): Имитационная модель, которая описывает один из типов ВЭУ и может быть настроена на имитацию различных вариантов ВЭУ этого типа с помощью изменения параметров модели.
3.2 составляющая прямой последовательности (в трехфазной системе) [positive (sequence) component (of a three-phase system)]: Одна из трех симметричных составляющих как симметричной, так и несимметричной трехфазной системы синусоидальных величин {напряжений или токов) с чередованием фаз. принятым в качестве основного, при разложении по методу симметричных составляющих.
2
ГОСТ Р 54418.27.1—2019
Примечание — Составляющую прямой последовательности вычисляют по формуле
Xi = ^,^2^). (1)
где а — оператор поворота на 120“;
X — фазное значение системного напряжения или тока;
^LV ^L2 W^L3 — комплексные представления соответствующих фазных величин.
3.3 составляющая обратной последовательности (в трехфазной системе) [negative (sequence) component (of a three-phase system)]: Одна из трех симметричных составляющих трехфазной несимметричной системы синусоидальных величин (напряжений или токов) с чередованием фаз. обратным принятому в качестве основного, при разложении по методу симметричных составляющих.
Примечания
1 Составляющую обратной последовательности вычисляют по формуле
*2 = д^и+£2*а+®£1.з)- (2)
2 Составляющие обратной последовательности тока или напряжения имеют ненулевое значение только в том случае, когда соответственно ток или напряжение не являются сбалансированными. Например, если фазные выражения для напряжения симметричны, то есть
U , = Ue1". U2 = ие«“‘4*«> и ^. = Ue^*2"'3». то
Уз = |be'ft +e',4vWe‘4’^ (3)
3.4 составляющая нулевой последовательности (в трехфазной системе) [zero (sequence) component (of a three-phase system)]: Одна из трех симметричных составляющих трехфазной несимметричной системы синусоидальных величин (напряжений или токов), совпадающих между собой по фазе.
Примечание — Составляющую нулевой последовательности вычисляют по формуле
& =tjI2£li + &2+ &з]- И)
3.5 коэффициент носимметрии (unbalance factor): Степень несимметрии в трехфазных системах синусоидальных величин, выраженная отношением (в процентах) среднеквадратичных значений составляющей обратной последовательности (или нулевой последовательности) к составляющей прямой последовательности напряжения или тока.
3.6 устойчивость электроэнергетической системы (power system stability): Способность электроэнергетической системы сохранять синхронную работу электрических станций после отключений линий электропередачи, оборудования объектов электроэнергетики и энергопринимающих установок.
3.7__________________________________________________________________________________________________
установившийся режим работы электротехнического изделия (электротехнического устройства. электрооборудования) (steady-state): Режим работы электротехнического изделия (электротехнического устройства, электрооборудования), при котором значения всех параметров режима практически неизменны или изменяются периодически.
[ГОСТ 18311—80, статья 94]___________________________________________________________
3.8__________________________________________________________________________________________________
установившийся режим энергосистемы: Электроэнергетический режим энергосистемы, характеризующийся незначительными изменениями значений технических параметров, позволяющими считать их неизменными.
[ГОСТ Р 57114-2016. статья 3.106]__________________________________________________________
3.9 квазиустановившийся режим (quasi steady state): Кратковременный установившийся режим, в рамках переходного процесса после возмущения (например, провал напряжения), длительность которого позволяет считать изменения параметров данного режима незначительными.
3.10 провал напряжения (voltage dip): Внезапное снижение напряжения в какой-либо точке системы с последующим восстановлением в течение короткого времени, от нескольких периодов до нескольких секунд.
3
ГОСТ Р 54418.27.1—2019
3.11 опорное значение параметра: Значение параметра, относительно которого происходит регулирование.
3.12 переходный период (transient time period): Период времени, когда происходят наблюдаемые переходные электромагнитные процессы.
3.13 время реакции (reaction time): Время от момента выдачи команды на изменение до того момента. когда наблюдаемая величина достигнет 10% установившегося значения.
Примечание — Время реакции показано на рисунке 1.
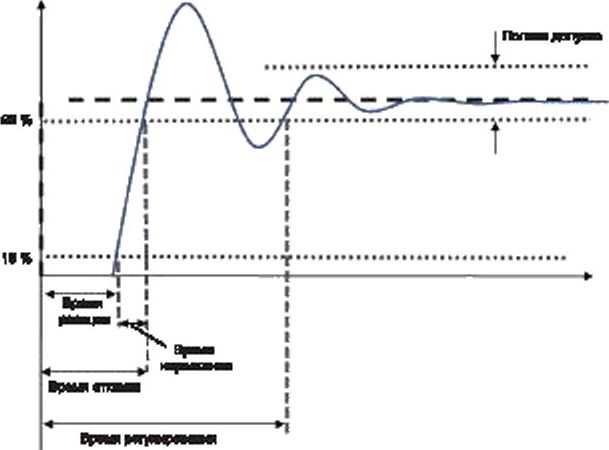
Рисунок 1 — Пример переходного процесса
3.14 время отклика (response time): Время от момента выдачи команды на изменение до того момента, когда наблюдаемая величина впервые попадает в заданный диапазон ее значений (полосу допуска) в установившемся режиме функционирования объекта.
Примечание — Время отклика показано на рисунке 1.
3.15 время регулирования (settling time): Время от момента выдачи команды на изменение до момента вхождения наблюдаемой величины в заданный диапазон ее значений (полосу допуска) в установившемся режиме функционирования объекта.
Примечание — Время регулирования показано на рисунке 1.
3.16 шаг интегрирования по времени (integration time step): Интервал времени моделирования между двумя последовательными численными решениями дифференциальных уравнений модели.
3.17 номинальное значение параметра электротехнического изделия (устройства): Значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Примечания
1 К числу параметров относятся, например, ток. напряжение, мощность.
2 Номинальное значение тока ВЭУ 1ти рассчитывают по формуле '-^ (5)
где Р,вм — номинальная активная мощность ВЭУ;
Цкм — номинальное напряжение ВЭУ.
3 Номинальные параметры ВЭУ определяют на выводах ВЭУ (см. 3.21 и рисунок 5).
3.18 номинальная мощность (ВЭУ) (nominal active power): Значение электрической мощности ВЭУ при расчетном значении скорости ветра, указанное изготовителем.
3.19 доступная аэродинамическая мощность (ВЭУ) (available aerodynamic power). Максимальная возможная мощность на валу встрохолеса/ротора ВЭУ с учетом скорости ветра, размеров ветроколеса/рото-ра. пределов скорости вращения ветроколеса/ротора и ограничений на угол установки лопастей.
4
ГОСТ Р 54418.27.1—2019
3.20________________________________________________________________________________________
номинальное напряжение электрической сети: Напряжение, на которое спроектирована электрическая сеть.
[ГОСТ Р 57382—2017, статья 3.2]____________________________________________________________
3.21 выводы ветроэнергетической установки (wind turbine terminals): Точка электрической части ВЭУ. определяемая поставщиком, в которой осуществляется подключение ВЭУ к коллекторной сети.
4 Обозначения
В настоящем стандарте, если не указано иное, используют значения напряжения и тока прямой последовательности основной частоты.
В дополнение к параметрам, определенным в каталоге моделей модулей (см. 5.6), в настоящем стандарте применены следующие обозначения (для переменных, выраженных в относительных единицах. в скобках приведены их базовые величины):
Примечание — Все параметры, характеризующие ВЭУ в целом (например, напряжение ВЭУ. измеренное и преобразованное напряжение ВЭУ, частота напряжения ВЭУ и т. п.). если не указано иное, определяют на выводах ВЭУ (см. 3.22 и рисунок 5).
О — угол установки лопастей, град:
г1П11 — начальное значение момента (MbasaX
Ч^о — базовый момент. Mbasc = Рнам/Ча«,. Нм;
%еп — Уповая скорость вращения генератора (Ц^Д
шго, — опорная угловая скорость вращения (Ц>В5в):
шй — угловая скорость вращения ветроколеса/ротора ВЭУ (Ча5е):
Чаае “ базовая угловая скорость вращения генератора, рад/с. Базовая угловая скорость вращения генератора определяется как
QHOU в отношении генератора i2base -"ом в отношении ветроколеса/ротора Лдеаг
Ц<ом ~ номинальная угловая скорость вращения генератора, рад/с:
cos 9 — коэффициент мощности;
f — частота напряжения ВЭУ (f1oJ;
f^ — частота напряжения в энергосистеме (Гном):
^ном “ номинальная частота напряжения в энергосистеме. fMOU = 50 Гц;
/ном — номинальный ток ВЭУ. А;
^и — фазное значение тока генератора в координатах системы питания (/мом);
^зу — фазное значение тока ВЭУ в координатах системы питания (Z^);
^эушеа “ измеренное и преобразованное значение тока ВЭУ (/ном);
'вэугаи “ необработанное значение тока ВЭУ. измеренное по ГОСТ Р 54418.21 (/моы);
'бэуяш — смоделированное и преобразованное значение тока ВЭУ (/иом):
'pond — уставка генератора по активному току (/мои);
kmax — максимальный генерируемый активный ток (/иом);
'qcmd _ уставка генератора по реактивному току (/ном);
'qmax — максимальный генерируемый реактивный ток (/MOW);
'qmax — максимальный генерируемый реактивный ток (/иом);
'qnun — минимальный генерируемый реактивный ток (/мом);
лдеаг — передаточное число между ветроколесом/ротором ВЭУ и генератором;
Ра0 — мощность генератора в воздушном зазоре (Р ^J;
Раего ~ аэродинамическая мощность (Риом);
POfd “ уставка по мощности от регулятора ВЭУ (Рмоы);
Риом “ номинальная мощность ВЭУ. Вт:
Рвэу — генерируемая активная мощность ВЭУ (Ptv3U):
(6)
5
ГОСТ Р 54418.27.1—2019
₽вэуге( — опорная активная мощность ВЭУ (Рнаы);
qB3y “ генерируемая реактивная мощность ВЭУ (Рмом);
^вэутах — максимальная генерируемая реактивная мощность ВЭУ (Рнам);
^вэутш — минимальная генерируемая реактивная мощность ВЭУ(Риом);
ггЫ — активное сопротивление ротора асинхронного генератора с переменным сопротивлением ротора (ZbasJ;
Тсот — общее время сбора данных для сравнения измеренных и смоделированных значений, с;
Ттеа — время сбора измеряемых необработанных значений переменных, с;
Т* — шаг интегрирования, с;
Uqen — фазное значение напряжения генератора в координатах системы питания (UMOM);
^ном — номинальное межфазное напряжение ВЭУ. В.
иЙЭУ — напряжение ВЭУ (инояУ,
^эу “ Фазнов значение напряжения ВЭУ в координатах системы питания (Ц,ом);
ивэутм — измеренное и преобразованное напряжение ВЭУ (Ц1ам):
°вэуга* — непреобразованное напряжение ВЭУ. измеренное по ГОСТ Р 54418.21 (Ц1ОМ);
uB3yBim “ смоделированное и преобразованное напряжение ВЭУ (Ц,ОИХ
Wfault ~ Длительность аварии, с:
Kaunas — квазистационарная часть интервала W(aull, с;
Wposl — временной интервал, определяющий период после аварии, с;
И/ lOS ~ квазистационарная часть интервала Wposl. с;
Wpre — временной интервал, определяющий период перед аварией, с;
хЕ(п) — временной ряд ошибок имитации, задаваемый обработкой сигнала:
хЫАЕ ~ средняя абсолютная ошибка во временном интервале:
хМЕ — средняя ошибка во временном интервале:
хгпеа(л) “ ^Д измерений времени, задаваемый обработкой сигнала.
хМХЕ — максимальная по модулю ошибка во временном интервале:
XjirJn) — временной ряд имитации, задаваемый обработкой сигнала,
х8ЭУ1С( “ опо₽ная реактивная мощность ВЭУ или опорное напряжение в зависимости от режима регулирования ВЭУ. Р ои или UltO}t.
Zb3M — базовое значение сопротивления. Zbaso = ^«^„„ы. Ом.
В настоящем стандарте применены индексы по ГОСТ 1494. а также следующие индексы: ад — относящееся к воздушному зазору: base — базовое значение.
cmd — текущая уставка генератора;
drt — относящееся к трансмиссии;
DTD — активное демпфирование трансмиссии:
Е — ошибка между имитационным и измеренным значением;
ег — входная ошибка устройства управления:
gen — генератора:
ini — начальное значение:
fill — отфильтрованное:
МАЕ — средняя абсолютная ошибка между имитационным и измеренным значением;
ME — средняя ошибка между имитационным и измеренным значением.
теа — измеренное значение;
МХЕ — максимальная ошибка между имитационным и измеренным значением;
ord — сигнал уровня активной или реактивной мощности, заданный регулятором ВЭУ;
over — повышение параметра/переменной;
р — активный компонент;
q — реактивный компонент;
R — относящееся к ветроколесу/ротору ВЭУ;
ref — опорное значение параметра, sim — имитационное значение;
и — напряжения;
under— понижение параметра/переменной;
UVRT — относящийся к преодолению провалов напряжения.
б
ГОСТ Р 54418.27.1—2019
5 Построение общих имитационных моделей ВЭУ
5.1 Типы ветроэнергетических установок
Ветроэнергетические установки, широко используемые для работы в энергосистемах, разделяют на следующие четыре типа:
- ВЭУ с асинхронным генератором, непосредственно подключаемым к энергосистеме, с короткозамкнутым ротором и постоянным сопротивлением (тип 1);
- ВЭУ с асинхронным генератором, непосредственно подключаемым к энергосистеме с переменным сопротивлением ротора (тип 2);
- ВЭУ с асинхронным генератором со статором, непосредственно подключаемым к энергосистеме. и ротором, подключаемым через преобразователь (тип 3);
- ВЭУ с синхронным и асинхронным генератором, подключаемым к энергосистеме через преобразователь (тип 4).
Описание ВЭУ каждого типа приведено в 5.5.
Примечание — В некоторых источниках, например, в соответствии с классификацией Международного общества по солнечной энергетике (ISES) типы ВЭУ обозначают как типы A-D.
5.2 Требования к моделям
Модели должны учитывать все типы ВЭУ. широко используемых для работы в энергосистемах (см. 5.1).
Для представления типичной реакции ВЭУ модели должны быть упрощенными, но при этом достаточно полными для достоверного описания динамического поведения на выводах ВЭУ и пригодными для исследования переходных процессов в энергосистеме с присоединенными ВЭУ.
Модели должны иметь модульную структуру. Это позволяет проводить их необходимую доработку в случае появления новых технологий или новых способов управления.
Модели должны быть четко определены при помощи структурных схем. Объяснения нелинейных компонентов, применяемых в модели уравнений, и всех особенностей работы модели должны позволять любому разработчику программного обеспечения выполнить разработку модели.
Общие модели ВЭУ включают общие модели модулей защиты электрической сети и управления, которые отличаются от конкретных устройств, применяемых для этих целей. Структура моделей должна позволять проводить замену общих модулей защиты электрической сети и управления на модули защиты и управления конкретного поставщика. Для представления возможных вариантов устройств модели указанных модулей должны включать легко настраиваемую параметризацию, которая может быть выполнена в отдельных модулях, представляющих средства защиты и управления.
Защита электрической сети по перенапряжению или понижению напряжения и по отклонениям частоты должна быть включена в модель в тех местах, где она представлена в системе управления. Защита электрической сети может быть представлена отдельными модулями, которые подключаются к основной модели ВЭУ.
Примечание — Установленные в стандарте модели не отображают защиту электрической сети с временем срабатывания, менее чем один период.
Модели должны обеспечивать получение свойств, проявляющихся при учете только прямой последовательности основной частоты.
Модели должны представлять все существенные динамические свойства по прямой лоследова-тельности основной частоты и описывать состояние системы:
- при симметричных коротких замыканиях в питающей сети (внешней по отношению к ВЭС. включая время восстановления напряжения);
- отклонениях частоты и напряжения в энергосистеме;
- электромеханических резонансах при биениях ротора синхронных генераторов (обычно в диапазоне 0.2—4.0 Гц);
- изменении опорных значений параметров, по которым происходит регулирование в модели ВЭУ.
- изменении опорных значений параметров, по которым ведется регулирование в модели ВЭУ.
Примечание — В общем случае для изучения устойчивости большинства электроэнергетических систем достаточно моделирования характеристик прямой последовательности. Правильное представление составляющих обратной и нулевой последовательности представляется неоправданно затруднительным.
7
ГОСТ Р 54418.27.1—2019
Модель должна включать возможность генерации ВЭУ реактивной мощности.
Модели должны быть верны в интервале допустимых в соответствии с ГОСТ Р 58491 отклонений частоты напряжения в энергосистеме (см. также [3]).
Модели должны правильно представлять отклонения напряжения установившегося режима от номинального значения, установленные в нормативных документах на момент применения настоящего стандарта.
Модели должны правильно представлять явления динамических изменений напряжения (например. короткие замыкания), когда напряжение может испытывать кратковременные провалы до уровня, близкого к нулевому.
Примечание — Модели не гарантируют правильности номенклатуры и очередности событий при перенапряжениях в электрической сети, к которой подключены ВЭУ. Для случаев провалов напряжения правильность моделей также ограничена в случае неустойчивости управления преобразователем мощности.
Типичное время имитационного моделирования реакции ВЭУ на внешние воздействия составляет от 10 до 30 секунд. В таком масштабе времени скорость ветра предполагается постоянной.
Шаг интегрирования по времени составляет до % периода и. следовательно, диапазон частот, при котором процесс воссоздается адекватно, не может превышать 15 Гц.
Примечания
1 Модели, установленные в настоящем стандарте, дают устойчивые результаты при шаге интегрирования по времени, составляющем 'Л периода, но при этом требуется изменение некоторых постоянных времени до уровня не менее удвоенного шага интегрирования по времени. Такое изменение параметров повлияет на точность моделирования.
2 Обычно принимается, что минимальная постоянная времени, которая включается в динамическую модель, должна составлять удвоенный шаг интегрирования по времени. Таким образом, ограничение шага интегрирования одной четвертью периода моделируемых колебаний обеспечивает работоспособность модели с шагом интегрирования по времени 0.005 с в наихудшем случае (50 Гц). При этом минимальная постоянная времени составляет 0.01 с. Для инерционного звена с постоянной времени 0.01 с граница полосы пропускания при затухании в 3 дБ составляет 10 рад/с. что соотвествует 15.9 Гц. которые округляются в меньшую сторону до 15 Гц.
Модель должна инициализироваться к установившемуся режиму при полной или частичной номинальной мощности ВЭУ посредством расчета потокораспределения мощности.
Внешние условия, такие как скорость ветра, должны быть включены в расчеты неявно через доступную аэродинамическую мощность.
В расчетах следует учитывать инерционные свойства комбинации ветроколеса/ротора с генератором и первую гармонику крутильных колебаний там. где они могут существенно влиять на колебания мощности.
Примечание — Это возможно только в тех случаях, когда частота первой гармоники крутильных колебаний находится в частотной полосе модели, что справедливо для практически всех ВЭУ.
Модели должны быть применимы как для случаев работы в системах с высокими значениями характеристик короткого замыкания, так и для случаев работы в системах с низкими значениями характеристик короткого замыкания. Минимальное значение отношения токов короткого замыкания и/или иные характеристики короткого замыкания системы, при которых модель применима для поставляемого оборудования, должны быть указаны изготовителями оборудования.
Требования, указанные в настоящем подразделе, не являются требованиями к производительности ВЭУ.
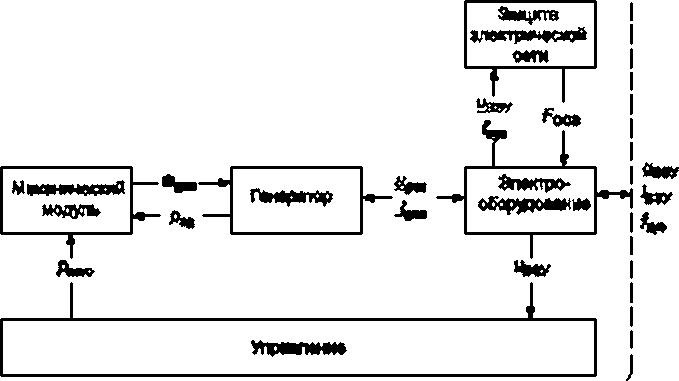
5.3 Взаимосвязь имитационной модели ВЭУ с имитационными моделями ВЭС и энергосистемы
Взаимодействия между моделью ВЭУ. моделью энергосистемы и моделью ВЭС показаны на рисунке 2.
В качестве входных переменных, характеризующих состояние энергосистемы в данный момент времени, модель ВЭУ использует напряжения, выходными переменными модели ВЭУ являются токи, характеризующие состояние ВЭУ для энергосистемы (реакцию ВЭУ на входные сигналы). Значения этих входных и выходных переменных определяют на выводах ВЭУ.
Моделирование может быть инициировано или событием в модели сети, таким как короткое замыкание. или изменением опорных значений параметров, задаваемых средствами управления ВЭС.
8
ГОСТ Р 54418.27.1—2019
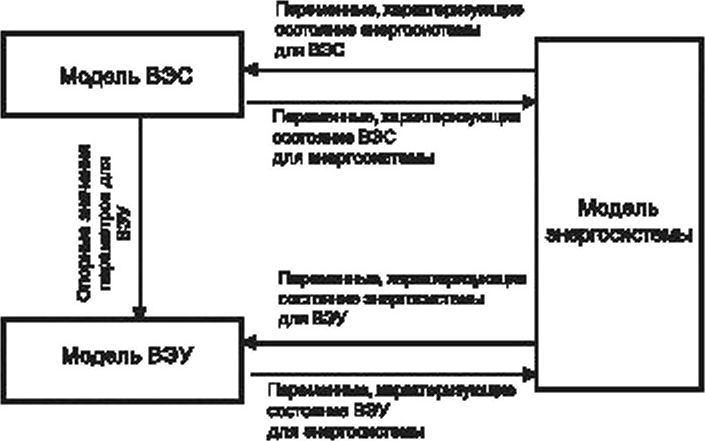
Рисунок 2 — Схема взаимодействий между моделью ВЭУ. моделью энергосистемы и моделью ВЭС
Опорные значения параметров, по которым происходит регулирование. ВЭУ может получать от ВЭС в оперативном режиме, обычно они предоставляются системой сбора данных ВЭС либо системой удаленного мониторинга. Набор опорных величин зависит от типа ВЭУ. изготовителя ВЭУ и рабочего режима. В общих моделях ВЭУ используются следующие опорные значения:
- опорное значение активной мощности;
- опорное значение реактивной мощности;
- опорное значение напряжения.
Примечание — В модели ВЭУ не включено регулирование по частоте. Соответственно для моделей ВЭУ не используется опорное значение частоты. Регулирование по частоте включено в модели уровня ВЭС (см., например, приложение А).
Модели ВЭУ также могут воспроизводить режим регулирования коэффициента мощности, но в этом случае предполагается, что опорное значение коэффициента мощности ВЭУ является постоянным на протяжении всего моделирования.
5.4 Параметры/переменные моделей и начальное состояние
5.4.1 Общие положения
Общие параметры моделей ВЭУ указаны в 5.4.3. Остальные параметры/переменные моделей ВЭУ определяют и объясняют в перечне к конкретной модели в каталоге моделей модулей ВЭУ (см. 5.6). Классификация этих параметров/леременных приведена в 5.4.2.
Параметры/переменные для каждого из модулей модели ВЭУ предоставляются изготовителем ВЭУ.
Некоторые из моделей модулей также используют переменные начального состояния, описанные в 5.4.4.
5.4.2 Виды параметров моделей модулей ВЭУ
В зависимости от того, чем определяется параметр (переменная), параметры (переменные) моделей модулей ВЭУ разделяют:
■ на параметры, зависящие от типа ВЭУ. Обычно это механические и электрические параметры;
- параметры, зависящие от проекта, т. е. от конкретного применения ВЭУ. работы ВЭУ в конкретной ВЭС; в разных проектах номенклатура этих параметров может быть различной для одного и того же типа ВЭУ. Обычно это параметры системы управления, которые определяются требованиями нормативных документов/требованиями системных кодексов:
- параметры, зависящие от режима работы ВЭУ. установившегося до возникновения переходного процесса, т. е. режима работы ВЭУ до поступления сигнала от системы электроснабжения или/и ВЭС (см. 5.3) — иначе предшествующего установившегося режима ВЭУ. Эти параметры являются случайными параметрами и определяются с использованием теории вероятности и математической статистики. Они зависят от параметров, характеризующих режим работы ВЭУ. случайным образом изменяющихся во времени, что связано, прежде всего, со случайной природой изменения ветра.
9
ГОСТ Р 54418.27.1—2019
Примечание — Например параметром, характеризующим режим работы ВЭУ. случайным образом изменяющимся во времени, является реальная мощность ВЭУ. которая в конкретный период времени, г. е. при конкретном установившемся режиме, может принимать значение от нуля до номинального значения в зависимости от скорости ветра. При этом в соответствии с принятым для общих моделей ВЭУ допущением, в пределах каждого установившегося режима скорость ветра и. соответственно, реальная мощность ВЭУ считаются постоянными.
Для построения моделей ВЭУ изготовитель должен указать, как случайные параметры зависят от параметров, характеризующих предшествующий установившийся режим ВЭУ. Изготовитель указывает, как и от каких параметров, характеризующих предшествующий установившийся режим ВЭУ, зависит каждый из случайных параметров, указанных для модели ВЭУ данного типа, приводит соответствующие зависимости.
Случайные параметры присутствуют в общих моделях ВЭУ типов 3 и 4 (в моделях аэродинамического модуля ВЭУ типов ЗА и ЗВ. модуля генератора ВЭУ типа ЗВ и модуля управления ВЭУ типов ЗА. ЗВ. 4А. 4В).
Примечание — К случайным параметрам общих моделей ВЭУ относятся:
- начальный угол установки лопастей (однопараметрическая аэродинамическая модель аэродинамического модуля ВЭУ типов ЗА. ЗВ. см. 5.6.1.2);
- доступная аэродинамическая мощность (двухлараметрическая аэродинамическая модель аэродинамического модуля ВЭУ типа ЗА. см. 5.6.1.3);
- угол установки лопастей, если номинальная мощность ВЭУ не понижена (двухпараметрическая аэродинамическая модель аэродинамического модуля ВЭУ типа ЗА. см. 5.6.1.3);
- длительности замыкания в зависимости от изменения напряжения (модель генератора ВЭУ типа ЗВ. см. 5.6.3.3);
- постоянная времени сглаживающего фильтра замыкающего усгройства (модель генератора ВЭУ типа ЗВ. см. 5.6.3.3);
- режим управления замыкающего усгройства (модель генератора ВЭУ типа 38. см. 5.6.3.3);
- смешение опорного значения, которое ограничивает действие регулятора при изменениях скорости вращения ротора генератора (модель регулирования активной мощности модуля управления ВЭУ типа 3. см. 5.6.5.4);
- смещение опорного напряжения (модель регулирования реактивной мощности модуля управления ВЭУ типов ЗА. ЗВ. 4А. 4В. см. 5.6.5.7).
То. чем в общем случае определяется каждый парамет^перемсмная. указало в перечнях параметров к моделям модулей ВЭУ в 5.6.
Изготовитель ВЭУ может изменить вариант определения параметров, указанный в 5.6. если это возможно для конкретной ВЭУ. Если возможно, количество случайных параметров, зависящих от предыдущего установившегося режима, должно быть минимальным. При изменении варианта определения параметров (по сравнению с указанными в 5.6) должен быть указаны ограничения для применения отличного от указанного в 5.6 варианта определения параметров/отдельного параметра (например, что приведенное определение параметров применяется для конкретного(ых) ВЭУ данного типа, для данного(ых) ВЭУ. используемой в конкретных условиях и т. п.).
5.4.3 Общие параметры моделей
Общие параметры моделей ВЭУ указаны в таблице 1.
Таблица 1 — Общие параметры моделей ВЭУ
Обозначение | Единица измерения | Описание |
Аои | Гц | Номинальная частота |
Г, | с | Шаг интегрирования по времени |
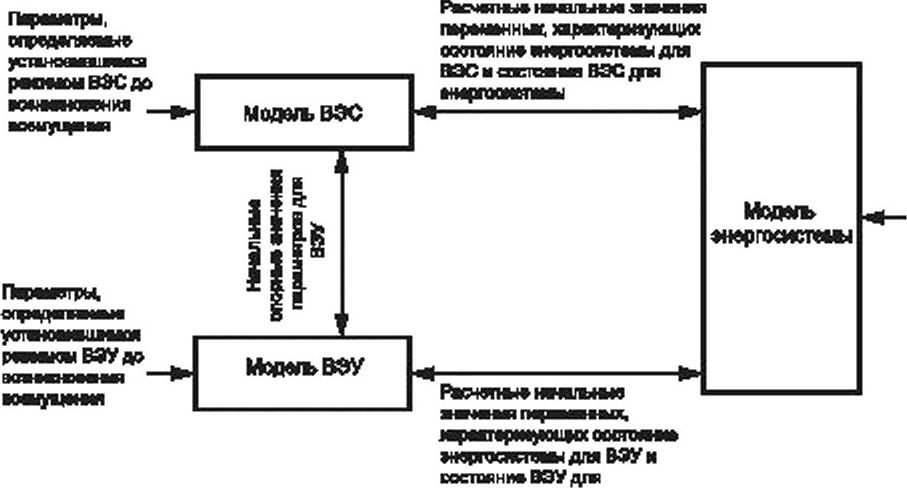
5.4.4 Начальное состояние
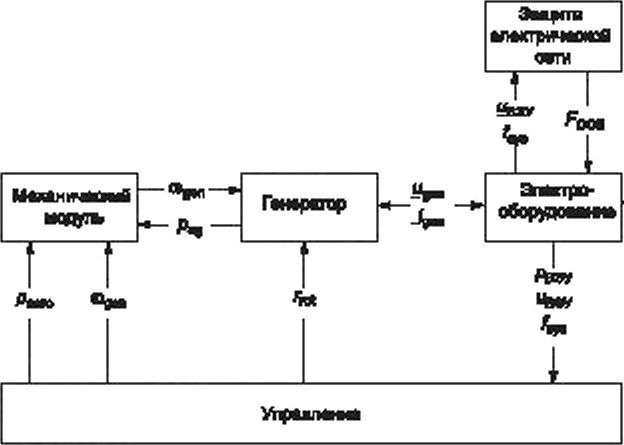
Начальное состояние модели ВЭУ должно быть согласовано с начальными состояниями модели энергосистемы и модели ВЭС. Взаимосвязь начальных состояний энергосистемы, модели ВЭС и модели ВЭУ показано на рисунке 3.
Перед инициализацией модели необходимо обновить параметры, зависящие от варианта построения сеанса моделирования (от установившегося режима ВЭУ до возникновения возмущения), а также параметры, определяемые потокораспределением мощности в модели энергосистемы и зависящие от варианта моделирования параметры ВЭУ и ВЭС.
10
ГОСТ Р 54418.27.1—2019
Повтры
■Wn««
ЩМЙЯПММШ
МГЖЦНОЕГЯ
МЧГСОКЯНШ
Рисунок 3 — Взаимосвязь начальных состояний моделей ВЭУ. ВЭС и энергосистемы
Модель энергосистемы приводится в начальное состояние параметрами потокораспределения мощности, которые должны быть заданы в соответствии с режимами управления в моделях ВЭС и ВЭУ. Эти параметры оказывают влияние на начальное состояние моделей ВЭС и ВЭУ. поскольку они определяют исходные напряжения и токи. Кроме того, в зависимости от начальных значений опорных параметров начальное состояние модели ВЭС может оказывать влияние на начальное состояние модели ВЭУ.
Переменные начального состояния, используемые в моделях ВЭУ. приведены в таблице 2.
Таблица 2 — Переменные начального состояния моделей ВЭУ
Обозначение | Базисная величина | Описание |
^inll | р мам | Начальная активная мощность |
^>1 | Начальный стационарный момент трансмиссии | |
19%и) | — | Коэффициент пересчета реактивной мощности по активной, используемый в регулировании коэффициентом мощности |
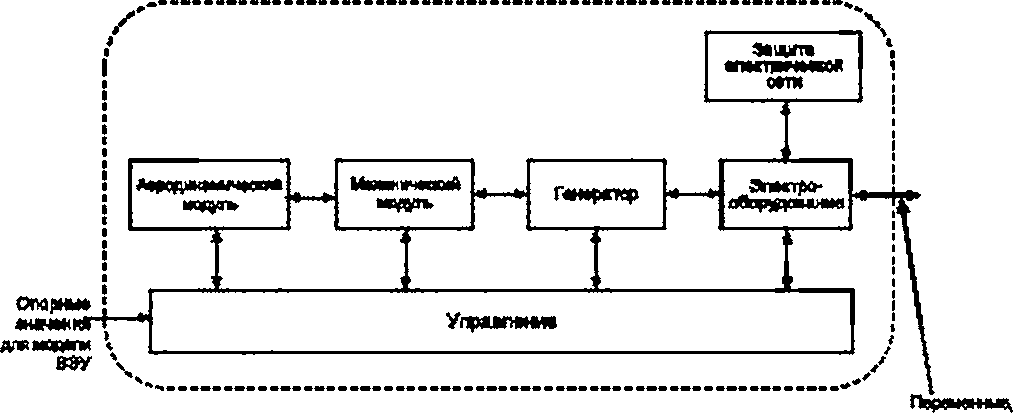
5.5 Структура общих моделей
5.5.1 Общая модульная структура
Модели ВЭУ строятся по модульному принципу. Общая структура моделей ВЭУ, установленных в настоящем стандарте, показана на рисунке 4. Эта структура соответствует структуре взаимодействия модели ВЭУ с моделью энергосистемы и моделью ВЭС. показанной на рисунке 2. Горизонтальный ряд модулей, расположенный посередине, отображает преобразование аэродинамической мощности в электрическую мощность на выводах ВЭУ.
5.5.2 Модели ВЭУ типа 1
5.5.2.1 Описание ВЭУ типа 1
В ВЭУ типа 1 применяют асинхронные генераторы, непосредственно подключаемые к энергосистеме. т. е. не использующие преобразователи энергии. В большинстве ВЭУ типа 1 применяют системы легкого запуска, но они являются активными только при первоначальном пуске.
11
ГОСТ Р 54418.27.1—2019
4MVRWIW
акпм»
w₽w»«fli« ВЭУмампмншВЭУ
д>*жх’хэ*от»*ь<
Рисунок 4 — Общая структура моделей ВЭУ
На рисунке 5 показаны основные электрические и механические компоненты, включаемые в модели ВЭУ типа 1. Ветроколесо/ротор ВЭУ соединено с асинхронным генератором через мультипликатор. Компенсацию реактивной мощности обеспечивает конденсаторная батарея. Большинство ВЭУ типа 1 оснащены конденсаторными батареями с механическим переключением, емкости которых при кратковременном моделировании считаются неизменяющимися. В ВЭУ типа 1 с защитой от провалов напряжения обычно используют конденсаторные батареи с тиристорным переключением, которые имеют динамическое управление во время и после возникновения неисправностей. Главный автоматический выключатель отсоединяет генератор и конденсаторы одновременно. Как указано в ГОСТ Р 54418.21, выводы ВЭУ могут располагаться как до, так и после трансформатора.
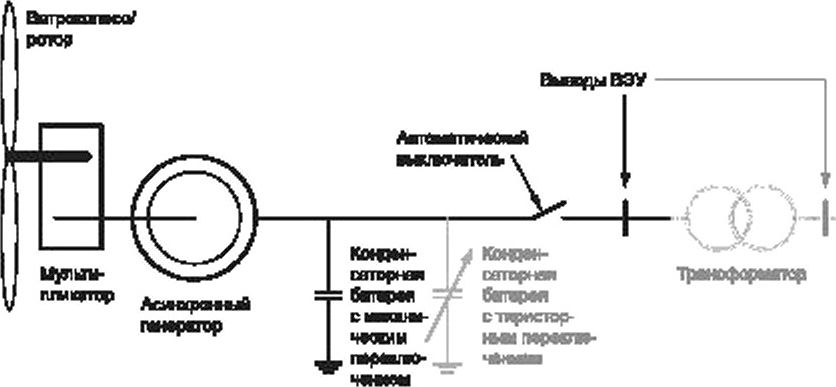
Примечание — Здесь и далее серым цветом обозначены возможные компоненты или варианты
компонентов.
Рисунок 5 — Основные электрические и механические компоненты ВЭУ типа 1
В ВЭУ типа 1 могут использоваться как ветроколесо/ротор с постоянным углом установки лопастей, так и с управляемым углом установки лопастей, положение которых может как ослаблять аэродинамическое торможение (положительный угол установки), так и усиливать его (отрицательный угол установки, также называемый активным управлением мощностью или комбинированным управлением торможением). В некоторых ВЭУ типа 1 управление углом установки лопастей используется для преодоления провалов напряжения.
12
ГОСТ Р 54418.27.1—2019
ВЭУ. в которых угол установки лопастей постоянный или управление им не используется для преодоления провалов напряжения, относят к ВЭУ типа 1А. ВЭУ. в которых управление углом установки лопастей используют для преодоления провалов напряжения, относят к ВЭУ типа 1В.
5.5.2.2 Структура модели ВЭУ типа 1А
На рисунке 6 показана структура модели ВЭУ типа 1А с постоянным углом установки лопастей. Модели, описывающие каждый модуль, указаны в таблице 3.
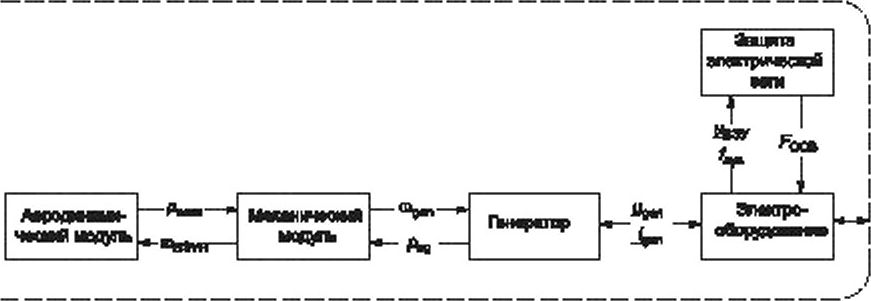
Рисунок 6 — Структура модели ВЭУ типа 1А
Таблица 3 — Модули глодали ВЭУ типа 1А
Модуль | Модели | Описание иодели, пункт |
Аэродинамический | Модель с постоянным аэродинамическим моментом | 5.6.1.1 |
Механический | Двухмассовая модель | 5.6.2.1 |
Генератор | Модель асинхронного генератора | 5.6.3.1 |
Электрооборудование | Модель шунтирующего конденсатора Модель автоматического выключателя (Модель трансформатора) | 5.6.4.1 5.6.4.2 (5.64.3) |
Защита электрической сети | Модель защиты электрической сети | 5.6.6 |
5.5.2.3 Структура модели ВЭУ типа 1В
На рисунке 7 показана структура модели ВЭУ типа 1 В. В этой модели предполагается управление углом установки лопастей для преодоления провалов напряжения. Модели, описывающие каждый модуль. указаны в таблице 4.
Примечание — На этом рисунке не показан аэродинамический модуль, так как аэродинамические процессы учтены в модуле управления.
Рисунок 7 — Структура модели ВЭУ типа 1В
13
ГОСТ Р 54418.27.1—2019
Таблица 4 — Модули модели ВЭУ типа 1В
Модуль | Модели | Описание модели, пункт |
Механический | Двухмассовая модель | 5.6.2.1 |
Генератор | Модель асинхронного генератора | 5.6.3.1 |
Электрооборудование | Модель шунтирующего конденсатора Модель автоматического выключателя {Модель трансформатора) | 5.6.4.1 5.6.4.2 (5.6.4.3) |
Управление | Модель регулирования мощности посредством изменения угла установки лопастей | 5.6.5.1 |
Защита электрической сети | Модель защиты электрической сети | 5.6.6 |
5.5.3 Модель ВЭУ типа 2
5.5.3.1 Определение ВЭУ типа 2
На рисунке 8 показаны основные электрические и механические компоненты, включаемые в модели ВЭУ типа 2.
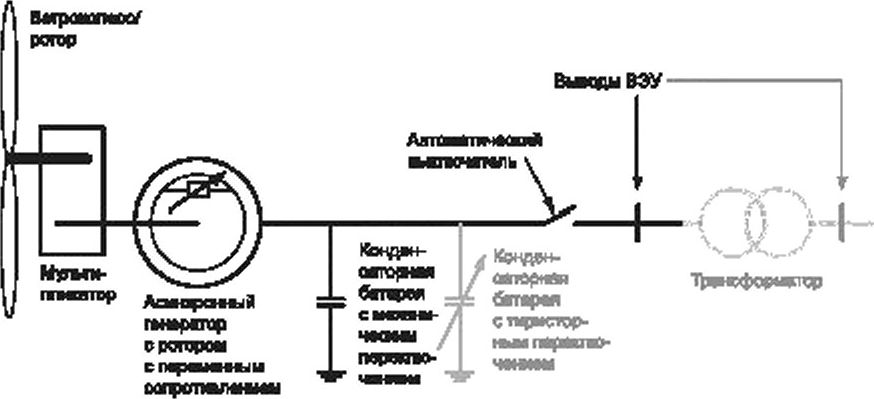
Рисунок 8 — Основные электрические и механические компоненты ВЭУ типа 2
Во многих отношениях ВЭУ типа 2 подобны ВЭУ типа 1. В отличие от ВЭУ типа 1 в ВЭУ типа 2 используют асинхронные генераторы с переменным сопротивлением ротора. ВЭУ типа 2 также обычно снабжены управлением углом установки лопастей.
5.5.3.2 Структура модели ВЭУ типа 2
Структура модели ВЭУ типа 2 показана на рисунке 9. Модели, описывающие каждый модуль, указаны в таблице 5.
14
ГОСТ Р 54418.27.1—2019
lbw few
v___________________________У
Примечание — На этом рисунке не показан аэродинамический модуль, так как аэродинамические воздействия включены в модуль управления.
Рисунок 9 — Структура модели ВЭУ типа 2
Таблица 5 — Модули модели ВЭУ типа 2
Модуль | Модели | Описание модели, пункт |
Механический | Двухмассовая модель | 5.6.2.1 |
Генератор | Модель асинхронного генератора | 5.6.3.1 |
Электрооборудование | Модель шунтирующего конденсатора Модель автоматического выключателя (Модель трансформатора) | 5.6.4.1 5.6.4.2 (5.6.4.3) |
Управление | Модель регулирования мощности посредством изменения угла установки лопастей Модель регулирования сопротивления ротора генератора | 5.6.5.1 5.6.5.3 |
Защита электрической сети | Модель защиты электрической сети | 5.6.6 |
На рисунке 10 показана структурная схема модуля управления для моделей ВЭУ типа 2. Для регулирования активной мощности используется модель регулирования мощности посредством изменения угла установки лопастей совместно с моделью регулирования сопротивления ротора генератора, а опорная реактивная мощность или опорное напряжение xref передается на модель шунтирующего конденсатора в модуле электрического оборудования.
5.5.4 Модели ВЭУ типа 3
5.5.4.1 Описание ВЭУ типа 3
В ВЭУ типа 3 используется асинхронный генератор с двойным питанием, в котором статор подключается к энергосистеме непосредственно, а ротор — через промежуточный преобразователь. На рисунке 11 показаны основные электрические и механические компоненты модели ВЭУ типа 3. Преобразователь состоит из преобразователя на стороне генератора, преобразователя на стороне сети, звена постоянного тока с конденсатором. ВЭУ типа 3 могут иметь достаточно мощный преобразователь на стороне генератора и коммутатор для преодоления провалов напряжения без необходимости шунтирования или отключения преобразователя. Другие ВЭУ типа 3 включают замыкающее устройство, которое замыкает ротор генератора накоротко при электромагнитных возмущениях и на это время превращает генератор ВЭУ в индукционную машину.
15
ГОСТ Р 54418.27.1—2019
4toy
Aw
^
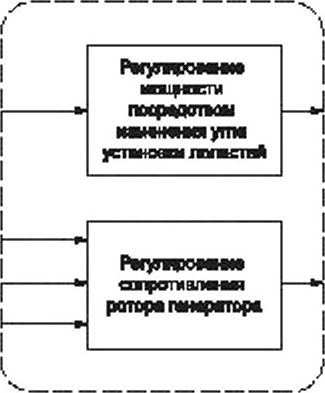
Рисунок 10 — Структурная схема модуля управления модели ВЭУ типа 2
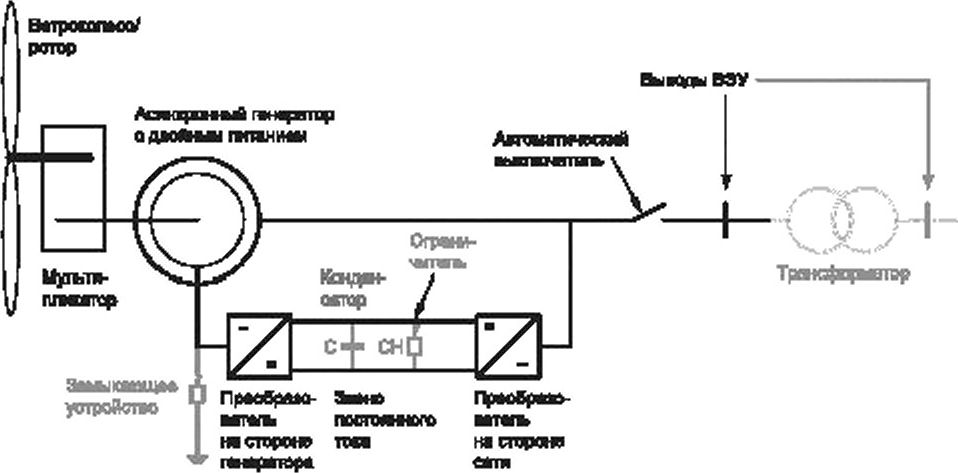
Рисунок 11 — Основные электрические и механические компоненты ВЭУ типа 3
5.5.4.2 Структура моделей ВЭУ типов ЗА и ЗВ
Структура моделей ВЭУ типов ЗА и ЗВ. показанная на рисунке 12. включает механический и аэродинамический модули. Это необходимо не для всех ВЭУ типа 3. В некоторых случаях для описания ВЭУ типа 3 достаточно упрощенной модели — одной из общих моделей ВЭУ типа 4. Модели ВЭУ типов ЗА и ЗВ отличаются моделью модуля генератора, а также для всех ВЭУ типа ЗВ аэродинамический модуль описывается одномерной аэродинамической моделью.
Модели, описывающие каждый модуль на рисунке 12. указаны в таблице 6.
16
ГОСТ Р 54418.27.1—2019
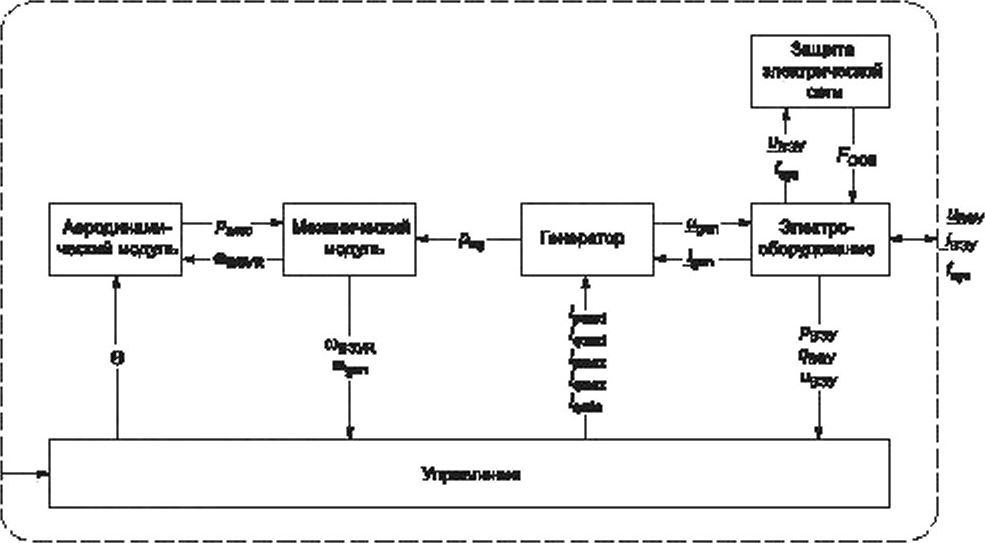
Рисунок 12 — Структура моделей ВЭУ типов ЗА и ЗВ
Таблица 6 — Модули моделей ВЭУ типа 3
Модуль | Модели | Описание модели, пункт |
Аэродинамический | Двухпараметрическая аэродинамическая модель или однолараметрическая аэродинамическая модель | 5.6.1.3 или 5.6.1.2 |
Механический | Двухмассовая модель | 5.6.2.1 |
Генератор | Модель генератора ВЭУ типа ЗА или модель генератора ВЭУ типа ЗВ | 5.6.3.2 или 5.6.3.3 |
Электрооборудование | Модель автоматического выключателя (Модель трансформатора) | 5.6.4.2 (5.6.4.3) |
Управление | Модель регулирования активной мощности ВЭУ типа 3 Модель регулирования реактивной мощности Модель ограничения тока Модель ограничения реактивной мощности или Модель ограничения реактивной и активной мощности или реактивной мощности и напряжения Модель управления углом установки лопастей | 5.6.5.4 5.6.5.7 5.6.58 5.6.5.Э или 5.6.5.10 5.6.5.2 |
Защита электрической сети | Модель защиты электрической сети | 5.6.6 |
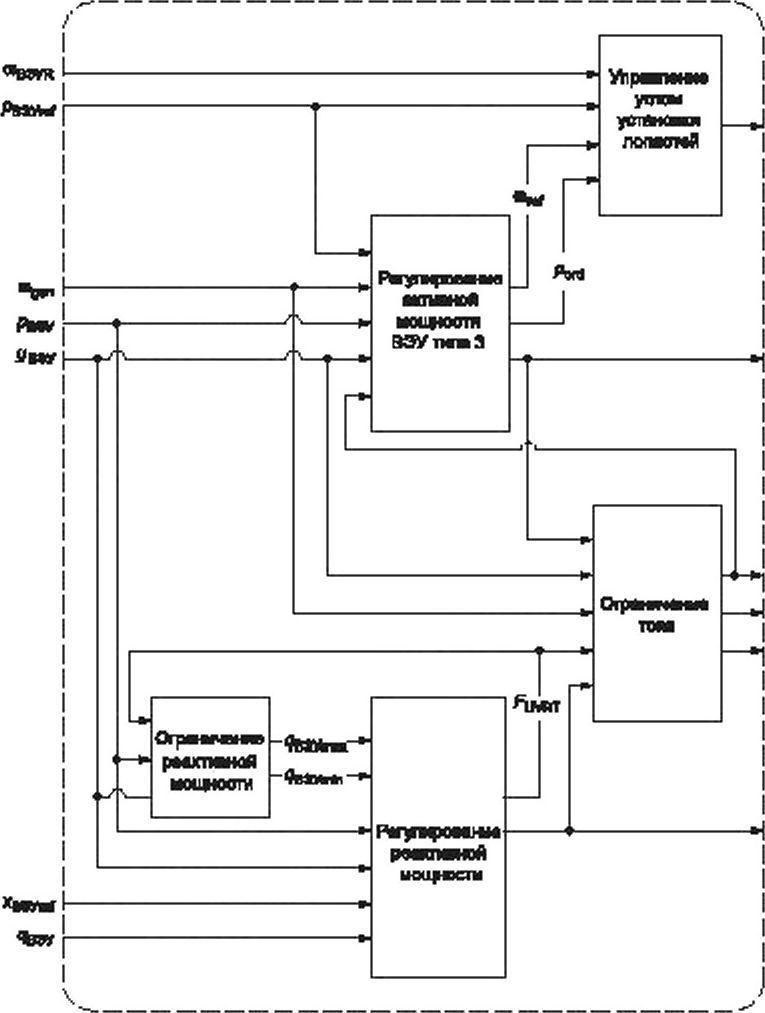
На рисунке 13 показана структурная схема модуля управления для моделей ВЭУ типа 3.
17
ГОСТ Р 54418.27.1—2019
в
Рисунок 13 — Структурная схема модуля управления моделей ВЭУ типа 3 (используется модель ограничения реактивной мощности)
5.5.5 Модели ВЭУ типа 4
5.5.5.1 Описание ВЭУ типа 4
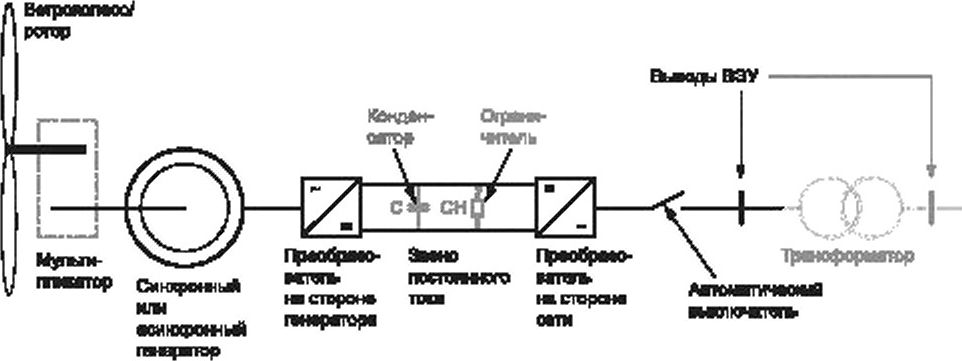
ВЭУ типа 4 подключают к энергосистеме через преобразователь, рассчитанный на полную мощность ВЭУ. На рисунке 14 показаны основные электрические и механические компоненты, включаемые в модели ВЭУ типа 4. В ВЭУ типа 4 применяют асинхронные или синхронные генераторы. В некоторых ВЭУ типа 4 применяют синхронные генераторы с прямым приводом, где отсутствует мультипликатор.
18
ГОСТ Р 54418.27.1—2019
0*t*HI
тпкмвм
Рисунок 14 — Основные электрические и механические компоненты ВЭУ типа 4
ВЭУ типа 4 с коммутаторами обычно могут быть представлены моделями, в которых отсутствуют аэродинамические или механические модули. ВЭУ без коммутатора порождают послеаварийные колебания мощности, обусловленные крутильными колебаниями. Это также справедливо для ВЭУ типа 4 коммутатором, рассчитанным на неполную мощность ВЭУ. Такие колебания мощности обычно не оказывают влияния на устойчивость энергосистемы, однако влияние крутильных колебаний может быть учтено с помощью двухмассовой модели. Если используется коммутатор, то коэффициент затухания колебаний трансмиссии в двухмассовой модели может быть приведен в соответствие с фактическим номиналом коммутатора. Для моделирования ВЭУ типа 4 может использоваться модель ВЭУ типа ЗА. однако обычно для представления ВЭУ типа 4 достаточно упрощенных моделей, поскольку преобразователь отделяет ВЭУ от энергосистемы.
Для ВЭУ типа 4 устанавливают две имитационных модели:
- для ВЭУ типа 4А — модель с отсутствующими аэродинамическими и механическими компонентами. и, вследствие этого, с отсутствием учета колебаний мощности;
- для ВЭУ типа 4В — модель, включающая двухмассовую модель для представления колебаний мощности (аэродинамический момент считается постоянным).
5.5.5.2 Структура модели ВЭУ типа 4А
Структура модели ВЭУ типа 4А показана на рисунке 15. Модели, описывающие каждый модуль, указаны в таблице 7.
19
ГОСТ Р 54418.27.1—2019
Риш
Knew
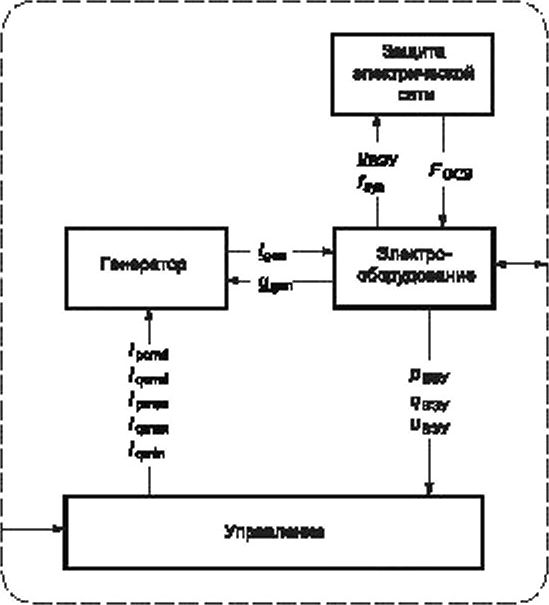
Рисунок 15 — Структура модели ВЭУ типа 4А
Таблица 7 — Модули модели ВЭУ типа 4А
Модуль | Модели | Описание модели, пункт |
Генератор | Модель генератора ВЭУ типа 4 или модель генератора ВЭУ типа ЗАЛ| | 5.6.3.4 или 5.6.32 |
Элект рооборудова ние | Модель автоматического выключателя (Модель трансформатора) | 5.64.2 (5.6.4.3) |
Управление | Модель регулирования активной мощности ВЭУ типа 4А Модель регулирования реактивной мощности Модель ограничения тока Модель ограничения реактивной мощности или Модель ограничения реактивной и активной мощности или реактивной мощности и напряжения | 5.6.5.5 5.6.5.7 5.6.5.8 5.6.5.Э или 5.6.5.10 |
Защита электрической сети | Модель защиты электрической сети | 5.6.6 |
31 В моделях ВЭУ типа 4 гложет использоваться модель генератора ВЭУ типа ЗА. в которой уменьшается скачок реактивной мощности, появляющийся после восстановления напряжения. Этот скачок обусловлен в основном численными погрешностями имитации. | ||
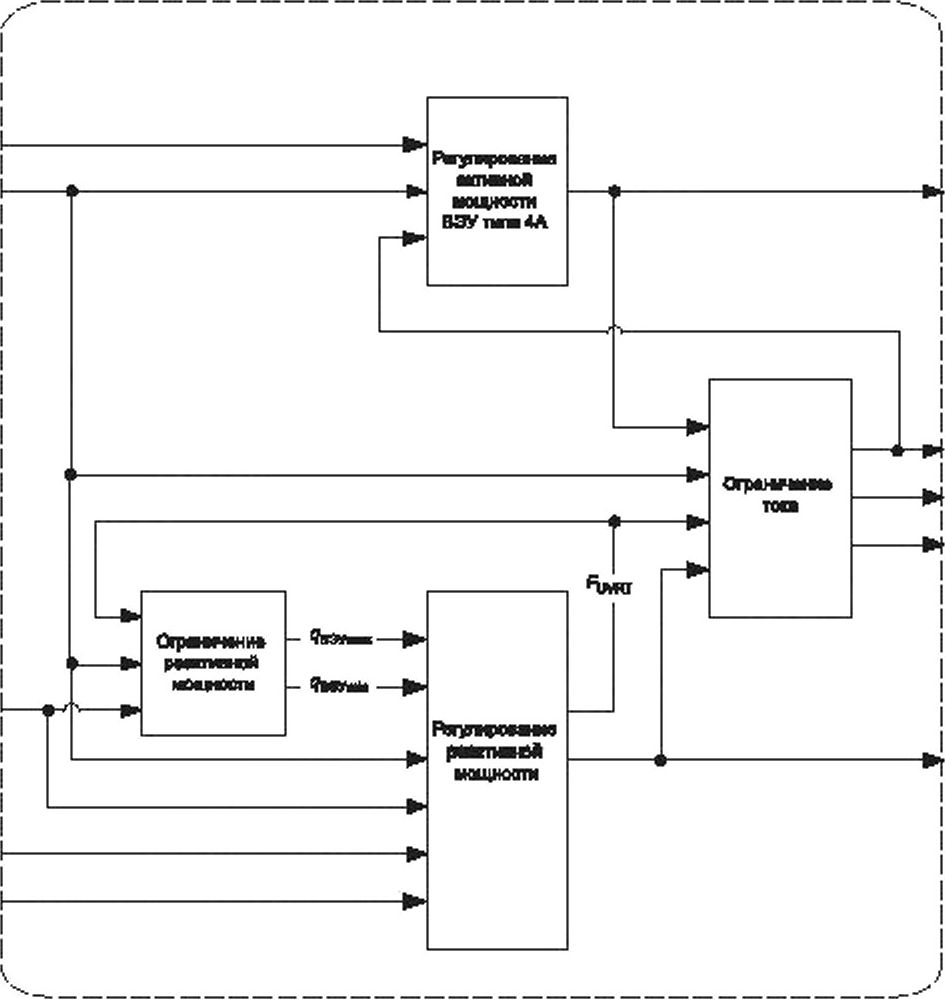
На рисунке 16 показана структурная схема модуля управления для моделей ВЭУ типа 4А.
20
Рви#
£№
xkbw
•w
ГОСТ Р 54418.27.1—2019
А
^*т+|
f«am
Рисунок 16 — Структурная схема модуля управления модели ВЭУ типа 4А (используется модель ограничения реактивной мощности)
5.5.5.3 Структура модели ВЭУ типа 4В
Структура модели ВЭУ типа 4В показана на рисунке 17. Модели, описывающие каждый модуль, указаны в таблице 8.
21
ГОСТ Р 54418.27.1—2019
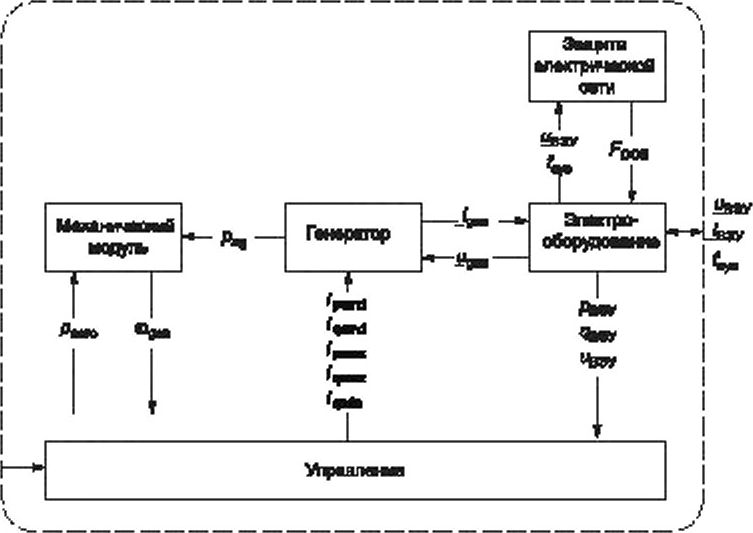
Рисунок 17 — Структура модели ВЭУ типа 4В
Таблица 8 — Модули модели ВЭУ типа 4 В
Модуль | Модели | Описание модели, пункт |
Механический | Двухмассовая модель | 5.6.2.1 |
Генератор | Модель генератора ВЭУ типа 4 или модель генератора ВЭУ типа ЗАа| | 5.6.3.4 или 5.6.3.2 |
Электрооборудование | Модель автоматического выключателя {Модель трансформатора) | 5.6.4.2 (5.6.4.3) |
Управление | Модель регулирования активной мощности ВЭУ типа 4В Модель регулирования реактивной мощности Модель ограничения тока Модель ограничения реактивной мощности или Модель ограничения реактивной и активной мощности или реактивной мощности и напряжения | 5.65.6 5.6.5.7 5.65.8 5.6.5.9 или 5.6.5.10 |
Защита электрической сети | Модель защиты электрической сети | 5.6.6 |
а| В моделях ВЭУ типа 4 гложет использоваться модель генератора ВЭУ типа ЗА. в которой уменьшается скачок реактивной мощности, появляющийся после восстановления напряжения. Этот скачок обусловлен в основном численными погрешностями имитации. | ||
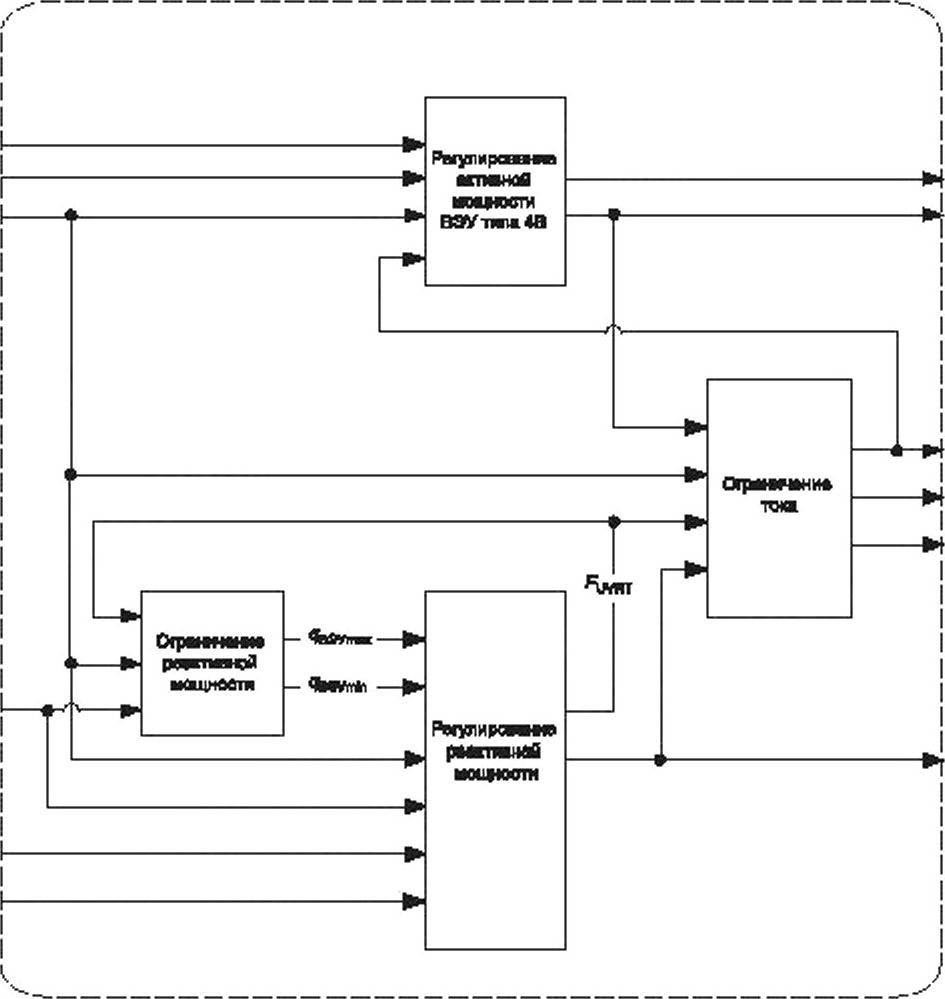
На рисунке 18 показана структурная схема модуля управления для моделей ВЭУ типа 4В.
5.6 Каталог моделей модулей ВЭУ
Типовые звенья, указанные на структурных схемах моделей модулей, приведены в приложении В.
5.6.1 Модели аэродинамического модуля
5.6.1.1 Модель с постоянным аэродинамическим моментом
На рисунке 19 показана структурная схема модели аэродинамического модуля с постоянным аэродинамическим моментом. Для этой модели не требуется каких-либо определяемых изготовителем ВЭУ параметров. Начальный момент tinil должен быть задан по параметрам потокораспределения мощности {см. рисунок 3).
22
Рви#
Миг
*33»
»3W
ГОСТ Р 54418.27.1—2019
Jf»"*
/яп*1
Рисунок 18 — Структурная схема модуля управления модели ВЭУ типа 4В (используется модель ограничения реактивной мощности)
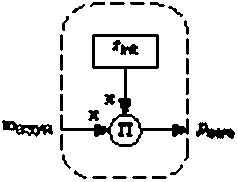
Рисунок 19 — Структурная схема модели с постоянным аэродинамическим моментом
5.6.1.2 Однопараметрическая аэродинамическая модель
В модели учитывается зависимость мощности от угла установки лопастей, но пренебрегается зависимостью мощности от скорости вращения ветроколеса/ротора. Структурная схема модели показана на рисунке 20. параметры модели приведены в таблице 9. Начальная мощность рпЛ должна быть задана по параметрам потокораспределения мощности (см. рисунок 3).
23
ГОСТ Р 54418.27.1—2019
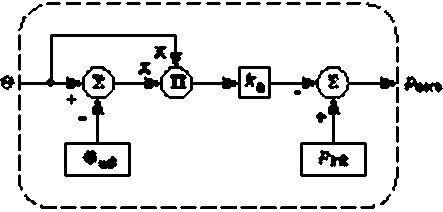
Рисунок 20 — Структурная схема однопараметрическая аэродинамической модели
Таблица 9 — Параметры однопараметрической аэродинамической модели
Обозначение | Базисная величина | Описание | Чем определяется |
град | Начальный угол установки лопастей | Предшествующим установившимся режимом ВЭУ | |
^..ом'град2 | Коэффициент аэродинамического усиления | Типом ВЭУ |
5.6.1.3 Двухпара метрическая аэродинамическая модель
Структурная схема модели показана на рисунке 21. параметры модели приведены в таблице 10.
В приложении С приведено подробное описание двухпараметрической аэродинамической модели, включая рекомендации производителям ВЭУ по определению параметров модели в зависимости от варианта модели (варианта ВЭУ данного типа), а также разработчикам программного обеспечения по расчету начального состояния в том случае, когда изготовителем представлены необходимые параметры.
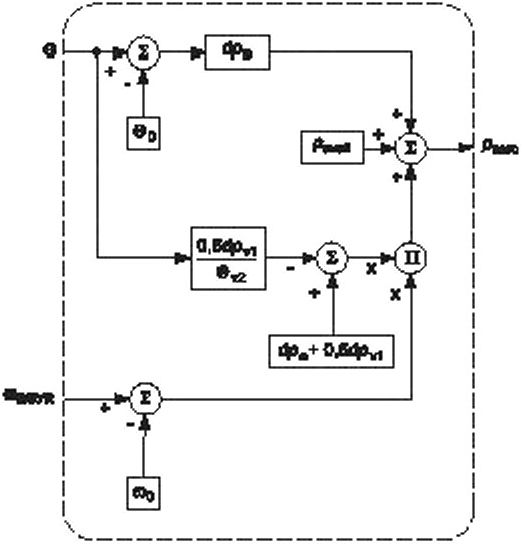
Рисунок 21 — Структурная схема двухпараметрической аэродинамической модели
Таблица 10 — Параметры двухпараметрической аэродинамической модели
Обозначение | Базисная величина | Описание | Чем определяется |
Pavad | р ком | Доступная аэродинамическая мощность3) | Предшествующим установившимся режимом ВЭУ |
24
Окончание таблицы 10
ГОСТ Р 54418.27.1—2019
Обозначение | Базисная величина | Описание | Чем определяется |
град | Угол установки лопастей, если номинальная мощность ВЭУ не понижена61 | Предшествующим установившимся режимом ВЭУ | |
“0 | ^зе | Скорость ветроколеса/ротора, если номинальная мощность ВЭУ не понижена | Типом ВЭУ |
pi«m^ | Частная производная аэродинамической мощности по углу установки лопастей | Типом ВЭУ | |
Фо, | Ржж/^^Ьазе | Частная производная аэродинамической мощности по угловой скорости вращения ветроколеса/ротора | Типом ВЭУ |
°v2 | град | Угол установки лопастей при удвоенной номинальной скорости ветра | Типом ВЭУ |
Фи | ^жжЛзе | Частная производная dp^ при номинальной скорости ветра | Типом ВЭУ |
а> Доступная аэродинамическая мощность позволяет выполнить моделирование с пониженным номиналом для объединения с устройством управления мощностью ВЭС для того, чтобы было возможно возрастание мощности ВЭУ. если для этого достаточно аэродинамической мощности. Начальная аэродинамическая мощность не может превосходить р^^. ь> Угол установки лопастей обычно должен быть равен нулю для рма < 1 и больше нуля при p^j = 1 или если начальное значение р меньше pa7aJ- | |||
5.6.2 Модель механического модуля. Двухмассовая модель
Структурная схема модели показана на рисунке 22. параметры модели приведены в таблице 11.
Примечание — Некоторые программные средства включают учет инерции генератора во встроенную модель генератора. В этом случае дополнительная механическая модель должна взаимодействовать с валом генератора вместо воздушного зазора генератора и. следовательно, не включать инерцию генератора. Полная механическая модель при этом остается двухмассовой моделью.
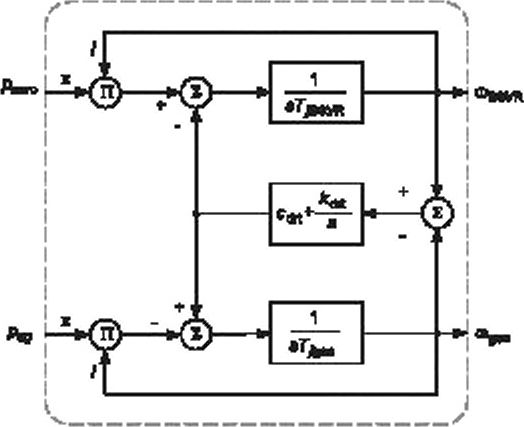
Рисунок 22 — Структурная схема двухмассовой модели
Таблица 11 — Параметры двухмассовой модели
Обозначение | Базисная величина | Описание | Чем определяется |
с | Постоянная инерции ветроколеса/ротора | Типом ВЭУ | |
Т-' | С | Постоянная инерции генератора | Типом ВЭУ |
Чезе | Коэффициент жесткости трансмиссии | Типом ВЭУ | |
c*t | Коэффициент затухания колебаний трансмиссии | Типом ВЭУ | |
■ В МЭК используют параметр коэффициент инерции Н = ’/> Тг | |||
25
ГОСТ Р 54418.27.1—2019
5.6.3 Модели генератора
5.6.3.1 Модель асинхронного генератора
При имитационном моделировании следует использовать стандартную модель асинхронного генератора. Обычной практикой при изучении устойчивости является учет переходных процессов в электрической цепи ротора и пренебрежение переходными процессами в электрической цепи статора.
Если применяются модели электродвигателя, следует принимать в расчет то. что в соответствии с настоящим стандартом, в модулях положительным принято направление тока в сеть, а не из сети.
Если применяются модели электродвигателя, следует принимать в расчет то. что в соответствии с настоящим стандартом, в модулях положительным принято направление тока в сеть, а не из сети.
5.6.3.2 Модель генератора ВЭУ типа ЗА
Структурная схема модели показана на рисунке 23. Параметры модели приведены в таблице 12. Модель звена вращения опорной системы отсчета приведена в 5.6.3.5.
Выходным параметром модели генератора является ток. выдаваемый в сеть регулируемым источником, который зашунтирован (поперечным) индуктивным сопротивлением Х5. Однако в некоторых программных средствах моделирования компоненты управления и энергосистемы трактуются различно. Для улучшения надежности расчетных алгоритмов может оказаться целесообразным учесть шунтирующее сопротивление в уравнениях сети.
Потерями в системе генератора пренебрегают, полагая мощность в воздушном зазоре между статором и ротором генератора рад равной мощности на выводах ВЭУ.
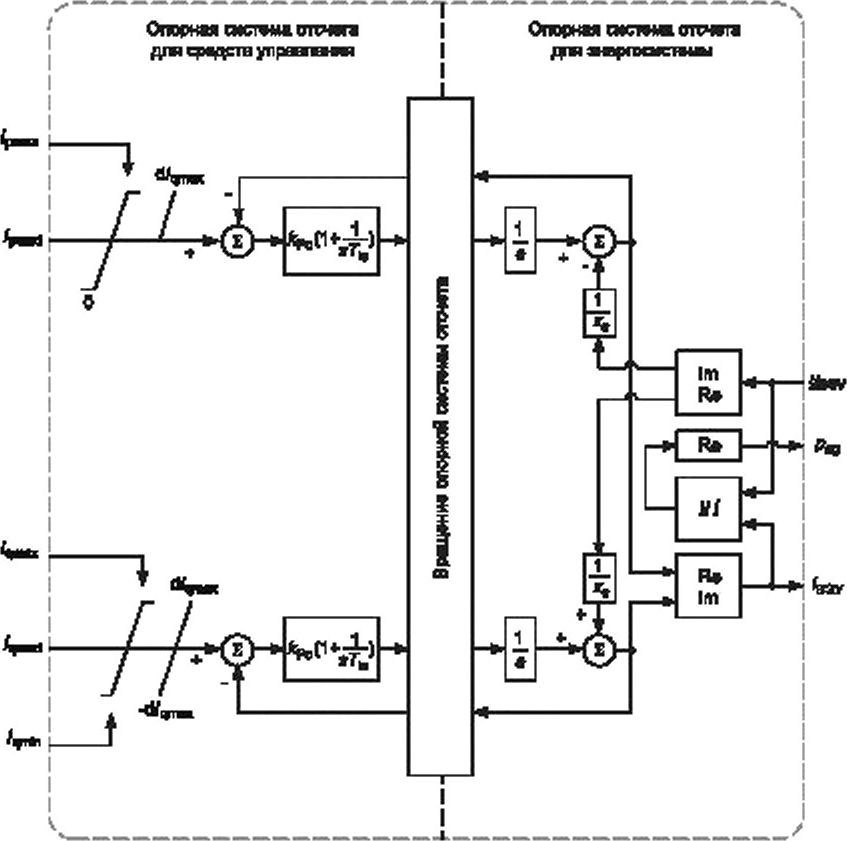
Re — активное значение (действительное}. Im — реактивное знамение (мнимое}
Рисунок 23 — Структурная схема модели генератора ВЭУ типа ЗА
26
Таблица 12 — Параметры модели генератора ВЭУ типа ЗА
ГОСТ Р 54418.27.1—2019
Обозначение | Базисная величина | Описание | Чем определяется |
КРс | — | Коэффициент передачи общего канала регулирования ПИ-регулятора тока | Тилом ВЭУ |
Лс | с | Постоянная времени интегрального канала ПИ-регулятора тока | Типом ВЭУ |
XS | Zbase | Электромагнитное переходное индуктивное сопротивление | Типом ВЭУ |
d'Fcax | ^HOW^C | Максимальная скорость нарастания активного тока | Проектом (работой ВЭУ в конкретной ВЭС) |
d’qmax | Um'С | Максимальная скорость нарастания реактивного тока | Проектом (работой ВЭУ в конкретной ВЭС) |
5.6.3.3 Модель генератора ВЭУ типа ЗВ
Структурная схема модели показана на рисунке 24. параметры и режимы модели приведены в таблице 13. Модель звена вращения опорной системы отсчета приведена в 5.6.3.5.
Эта модель является упрощением модели генератора ВЭУ типа ЗА с добавлением модели замыкающего устройства (см. [4]).
Выходным параметром модели генератора является ток. Однако в некоторых программных средствах моделирования для улучшения сходимости модели в модель модуля генератора необходимо добавить параллельное сопротивление Xs. Для улучшения сходимости модели в таких случаях рекомендуется разместить это параллельное сопротивление, равное результату деления напряжения статора на переходную реактивность, так. чтобы оно было включено в уравнение энергосистемы.
27
ГОСТ Р 54418.27.1—2019
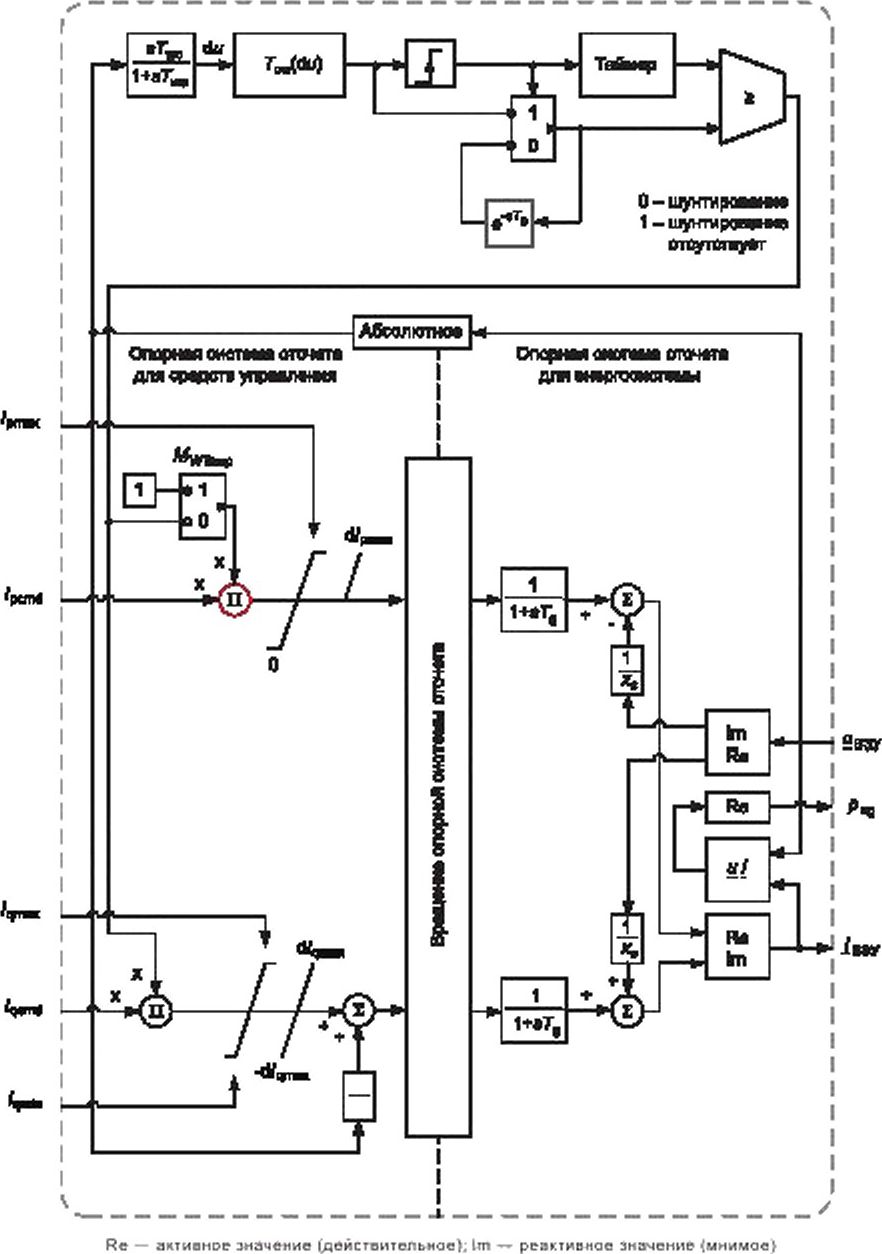
Рисунок 24 — Структурная схема модели генератора ВЭУ типа ЗВ
Таблица 13 — Параметры и режимы модели генератора ВЭУ типа ЗВ
Обозначение | Базисная величина | Описание | Чем определяется |
с | Постоянная времени генератора | Типом ВЭУ |
28
Окончание таблицы 13
ГОСТ Р 54418.27.1—2019
Обозначение | Базисная величина | Описание | Чем определяется |
d; репах | Low* | Максимальная скорость нарастания активного тока | Проектом (работой ВЭУ в конкретной ВЭС) |
qinax | U«/c | Максимальная скорость нарастания реактивного тока | Проектом (работой ВЭУ в конкретной ВЭС) |
XS | ^Ьзж | Электромагнитная переходная реактивность | Типом ВЭУ |
^cw^ | сотииом | Зависимость длительное™ замыкания от изменения напряжения (например, по справочной таблице) | Предшествующим установившимся режимом ВЭУ |
^D | с | Постоянная времени сглаживающего фильтра замыкающего устройства | Предшествующим установившимся режимом ВЭУ |
^ЙЭУскр | — | Режим управления замыкающего устройства | Предшествующим установившимся режимом ВЭУ |
5.6.3.4 Модель генератора ВЭУ типа 4
Структурная схема модели показана на рисунке 25. параметры модели приведены в таблице 14.
Модель звена вращения опорной системы отсчета приведена в 5.6.3.5.
f Owwwxnwv | {к1фяж1м«Ф«п \ дла орадет» ртрмпммв | ДПА «MfXtKMSTMM
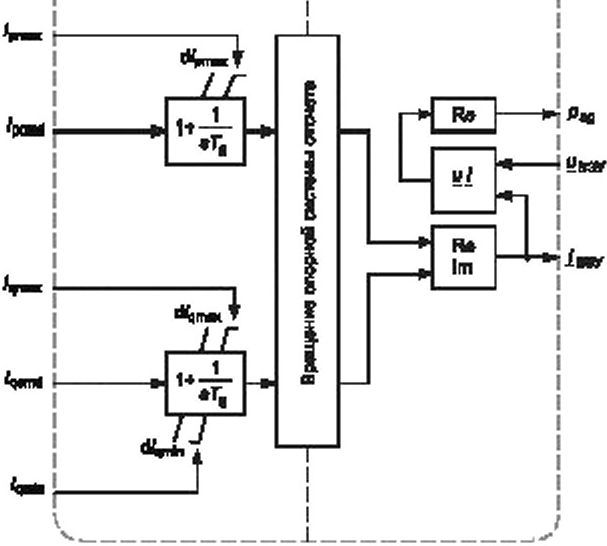
Re ~ активное значение (действительное); Im — реактивное значение (мнимое)
Рисунок 25 — Структурная схема модели генератора ВЭУ типа 4
Таблица 14 — Параметры модели генератора ВЭУ типа 4
Обозначение | Базисная величина | Описание | Чем определяется |
с | Постоянная времени генератора | Типом ВЭУ | |
d'pmax | 'и^ | Максимальная скорость нарастания активного тока | Проектом (работой ВЭУ в конкретной ВЭС) |
29
ГОСТ Р 54418.27.1—2019
Окончание таблицы 14
Обозначение | Базисная величина | Описание | Чем определяется |
qmax | Максимальная скорость нарастания реактивного тока | Проектом (работой ВЭУ в конкретной ВЭС) | |
di слип | U'c | Минимальная скорость нарастания реактивного тока | Проектом (работой ВЭУ в конкретной ВЭС) |
5.6.3.5 Модель вращения опорной системы отсчета
Структурная схема модели показана на рисунке 26. параметры модели приведены в таблице 15.
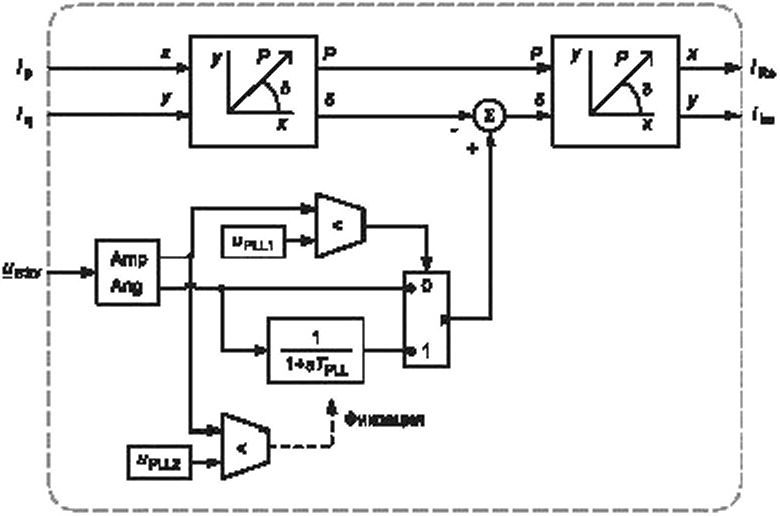
Amp — амплитуда; Апд — угол
Рисунок 26 — Структурная схема модели вращения опорной системы отсчета
Таблица 15 — Параметры модели вращения опорной системы отсчета
Обозначение | Базисная величина | Описание | Чем определяется |
TPLL | с | Постоянная времени модели фильтра первого порядка модуля автосинхронизации фазы | Типом ВЭУ |
UPLL1 | Напряжение, ниже которого угол 8 отфильтрован и возможно зафиксирован^ | Типом ВЭУ | |
UPLL2 | Напряжение, ниже которого угол 8 зафиксирован, если 44.L2 5 “РН.?’ | Типом ВЭУ | |
а| Угол выделяется и^или фиксируется во избежание неустойчивости при пропадании опорного напряжения. Ь| Значение uPLL2 должно быть согласовано со значением uPLL1. Обычно Ьрц_2 5 UPLL1- Напряжение up,__L2 применяется для того, чтобы избежать вычислительных проблем, когда напряжение близко к нулю и вследствие этого численное значение угла не определено. | |||
5.6.4 Модели электрооборудования
5.6.4.1 Модели шунтирующего конденсатора
Для батарей конденсаторов с механическим переключением следует использовать стандартную модель конденсатора основной частоты, имеющуюся в средствах моделирования. Для батарей конден-30
ГОСТ Р 54418.27.1—2019
саторов с тиристорным переключением может использоваться стандартная модель установки статической компенсации реактивной мощности.
5.6.4.2 Модель автоматического выключателя
При моделировании следует использовать стандартную модель автоматического выключателя, имеющуюся в средствах моделирования. Модель автоматического выключателя должна отключать выключатель при получении ею команды на отключение [FOCB].
5.6.4.3 Модель трансформатора
Для моделирования следует использовать стандартную модель трансформатора, имеющуюся в средствах моделирования.
5.6.5 Модели управления
5.6.5.1 Модель регулирования мощности посредством изменения угла установки лопастей
Структурная схема модели показана на рисунке 27. параметры модели приведены в таблице 16.
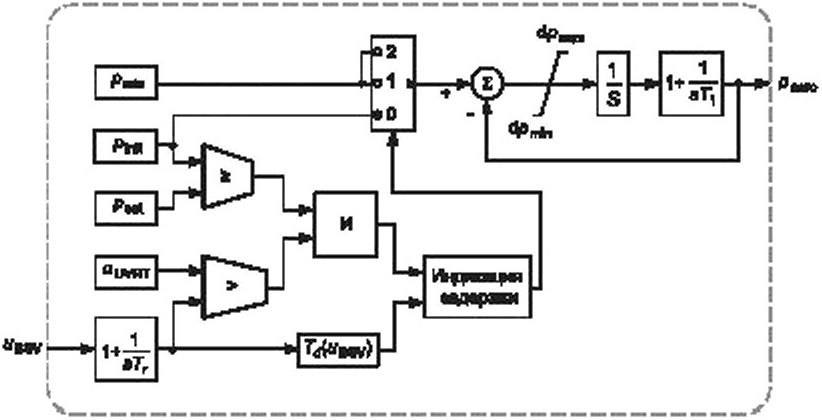
Примечание — Начальная мощность pjnil задается по параметрам потокораспределения мощности.
Рисунок 27 — Структурная схема модели управления мощностью углом установки лопастей
Таблица 16 — Параметры модели управления мощностью утлом установки лопастей
Обозначение | базисная величина | Описание | Чем определяется |
Г, | с | Постоянная времени измерения напряжения | Типом ВЭУ |
^Рщзх | р ком | Предел скорости возрастания мощности | Типом ВЭУ |
^Pmin | р мам | Предел скорости снижения мощности | Типом ВЭУ |
Л | с | Постоянная времени задержки | Типом ВЭУ |
Prnin | Риам | Заданное значение минимальной мощности | Типом ВЭУ |
Pset | Рнам | Значение мощности для сравнения. Если pnf < рх1. мощность снижается до р,Г4П | Типом ВЭУ |
Л^взу) | <^^> | Справочная таблица зависимости снижения мощности после провала напряжения от степени провала3' | Типом ВЭУ |
“llVRT | ^ном | Пороговое значение выявления провалаь' | Типом ВЭУ |
a> Справочная таблица должна определяться шагами между четырьмя точками. ь> “uvrt Должно быть равно наибольшему напряжению в rd(u). | |||
5.6.5.2 Модель управления углом установки лопастей
Структурная схема модели показана на рисунке 28. параметры модели приведены в таблице 17.
31
ГОСТ Р 54418.27.1—2019
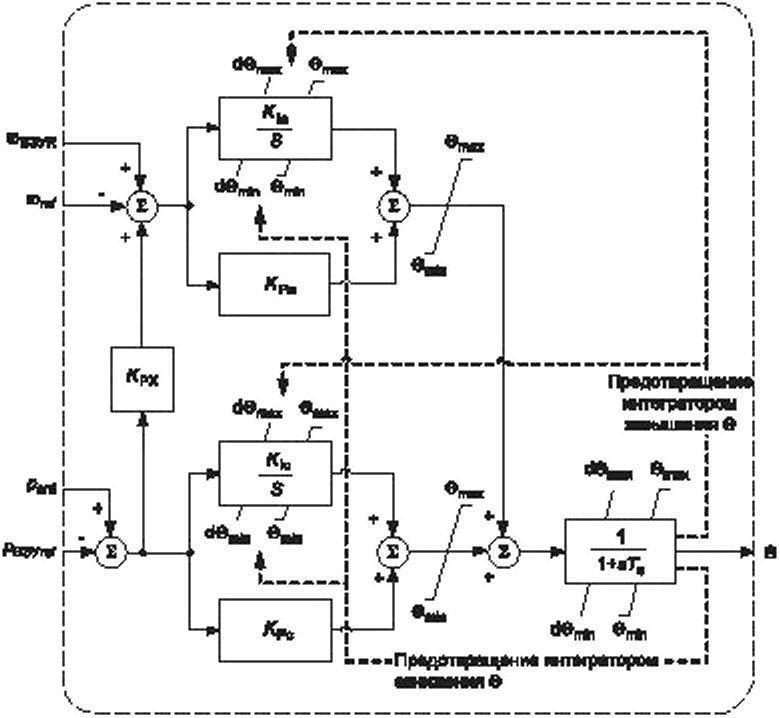
Примечание — В модели для защиты от выхода значения угла установки лопастей за допустимые пределы использован интегратор с ограничениями, описанный в В.8. и фильтр первого порядка с ограничениями, описанный в В. 10.
Рисунок 28 — Структурная схема модели управления углом установки лопастей
Таблица 17 — Параметры модели управления углом установки лопастей
Обозначение | Базисная величина | Описание | Чем определяется |
градк^е | Коэффициент передачи пропорционального канала ПИ-ре-гулягора угловой скорости | Типом ВЭУ | |
град-П^с | Коэффициент передачи интегрального канала ПИ-регулятора угловой скорости | Типом ВЭУ | |
^Рс | ГР^КЗЫ | Коэффициент передачи пропорционального канала ПИ-регулятора мощности | Типом ВЭУ |
«(с | град'Чкз.л | Коэффициент передачи интегрального канала ПИ-регулятора мощности | Типом ВЭУ |
ПЬа5е ;Риом | Коэффициент связи регуляторов | Типом ВЭУ | |
Чпах | град | Максимальный угол установки лопастей | Типом ВЭУ |
град | Минимальный угол установки лопастей | Типом ВЭУ | |
граде | Максимальная скорость увеличения угла установки | Типом ВЭУ | |
град/с | Минимальная скорость уменьшения угла установки | Типом ВЭУ | |
с | Постоянная времени установки лопастей | Типом ВЭУ |
5.6.5.3 Модель регулирования сопротивления ротора генератора
Структурная схема модели показана на рисунке 29. параметры модели приведены в таблице 18.
32
ГОСТ Р 54418.27.1—2019
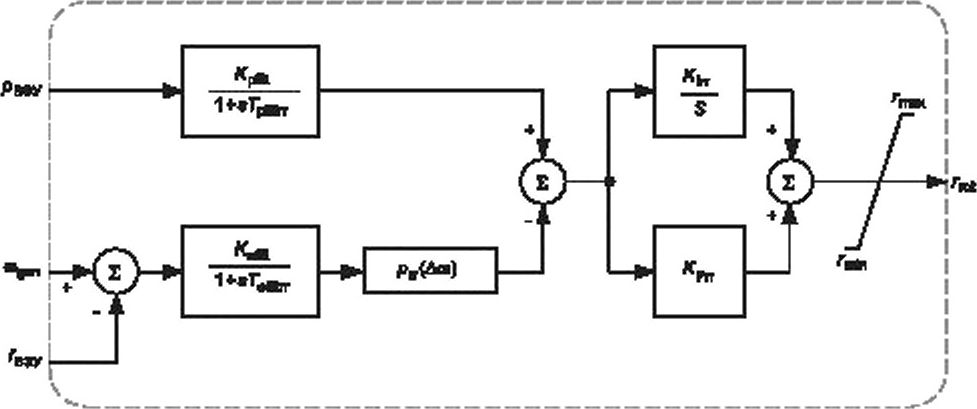
Рисунок 29 — Структурная схема модели регулирования сопротивления ротора генератора
Таблица 18 — Параметры глодели регулирования сопротивления ротора генератора
Обозначение | Базисная величина | Описание | Чей определяется |
^рГЛг | / | Постоянная времени фильтра при измерении мощности | Типом ВЭУ |
КрГЛ | — | Коэффициент усиления фильтра при измерении мощности | Типом ВЭУ |
Лс/iltrr | Постоянная времени фильтра при измерении скорости генератора | Типом ВЭУ | |
^п | — | Коэффициент усиления фильтра при измерении скорости генератора | Типом ВЭУ |
РГГ6М | ^ном ("Ьам> | Справочная таблица зависимости мощности от изменения скорости (отрицательное скольжение) | Типом ВЭУ |
«РГГ | ^base ^ном | Коэффициент передачи пропорционального канала ПИ-регулятора сопротивления ротора | Типом ВЭУ |
Лазе ^ном 'с | Коэффициент передачи интегрального канала ПИ-регулятора сопротивления ротора | Типом ВЭУ | |
rmax | Лаве | Максимальное активное сопротивление ротора | Типом ВЭУ |
Лаве | Минимальное активное сопротивление ротора | Типом ВЭУ |
5.6.5.4 Модель регулирования активной мощности ВЭУ типа 3
Структурная схема модели показана на рисунках 30 и 31. параметры модели приведены в таблице 19.
33
ГОСТ Р 54418.27.1—2019
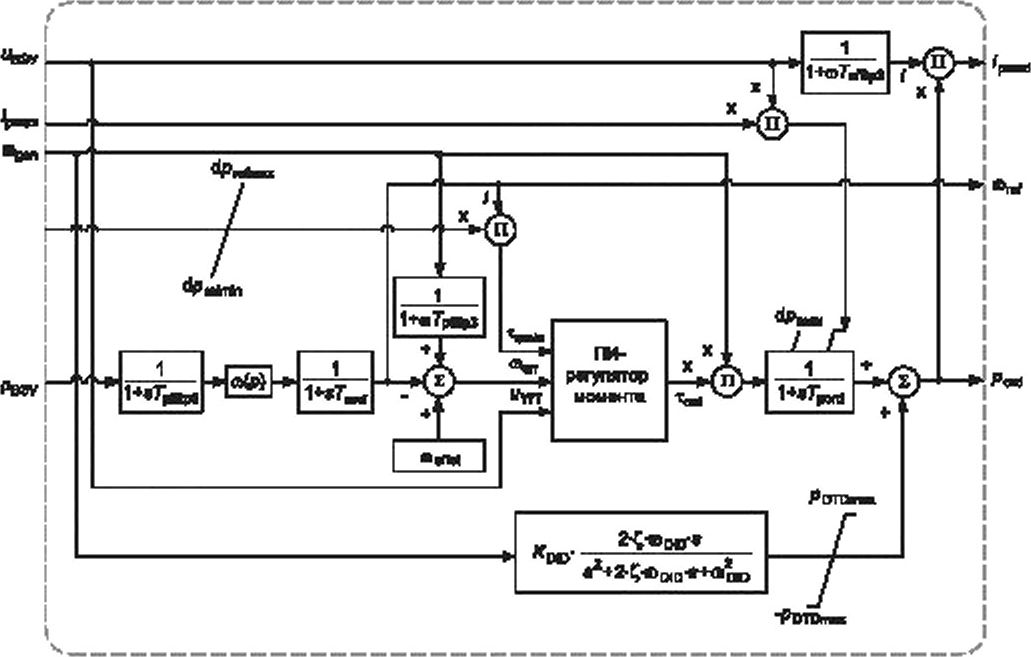
Примечание — Звено ПИ-регулятора момента приведено на рисунке 31.
Рисунок 30 — Структурная схема модели регулирования активной мощности ВЭУ типа 3
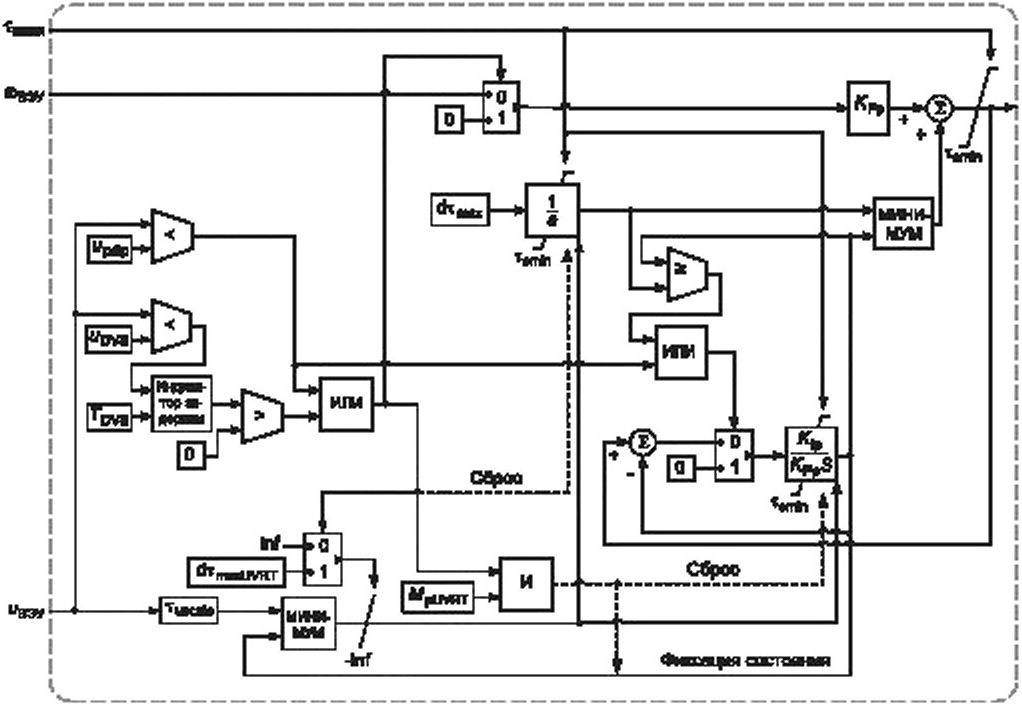
Рисунок 31 — Структурная схема ПИ-регулятора момента
34
ГОСТ Р 54418.27.1—2019
Таблица 19 — Параметры модели управления активной мощностью ВЭУ типа 3
Обозначение | Базисная величина | Описание | Чем определяется |
|ваЫ | “base | Смещение опорного значения, которое ограничивает действие регулятора при изменениях скорости вращения ротора генератора | Предшествующим установившимся режимом ВЭУ |
МР) | Цианом} | Справочная таблица зависимости мощности от скорости вращения ротора генератора | Типом ВЭУ |
*рр | Ц>ам 'Чаи: | Коэффициент передачи пропорционального канала ПИ-регулятора мощности | Типом ВЭУ |
Ч | Цмм '^base1'0 | Коэффициент передачи интегрального канала ПИ-регулятора мощности | Типом ВЭУ |
rpatp3 | С | Постоянная времени фильтра при измерении мощности | Типом ВЭУ |
Ллщз | С | Постоянная времени фильтра при измерении напряжения | Типом ВЭУ |
Лхе( | С | Постоянная времени в опорном фильтре скорости | Типом ВЭУ |
ЛсбИрЗ | С | Постоянная времени фильтра при измерении скорости вращения ротора генератора | Типом ВЭУ |
KDTO | ^M^base | Коэффициент усиления при активном демпфировании трансмиссии | Типом ВЭУ |
₽DT0max | Рном | Максимальная мощность активного демпфирования трансмиссии | Типом ВЭУ |
— | Коэффициент для активного демпфирования транс-миосии | Типом ВЭУ | |
“DTD | «Ьа« | Частота активного демпфирования трансмиссии может быть рассчитана по параметрам двухмассовой модели из таблицы 11: “ото Лп т + т I Рдэук 'I9«nj | Типом ВЭУ |
^pord | С | Постоянная времени задержки для сигнала уровня мощности | Типом ВЭУ |
dPmax | Максимальная скорость увеличения мощности ВЭУ | Типом ВЭУ | |
^Prefinax | р^с | Максимальная скорость роста опорной мощности ВЭУ | Проектом (работой ВЭУ в конкретной ВЭС) |
^Preftfiin | р,^с | Минимальная скорость роста опорной мощности ВЭУ | Проектом (работой ВЭУ в конкретной ВЭС) |
UP*P | Порог падения напряжения для регулирования по активной мощности. Часть управления ВЭУ. часто отличная от пороговых значений преобразователя (на-пример, 0.8) | Проектом (работой ВЭУ в конкретной ВЭС) | |
drmax | Ц>ая /с | Предельно допустимая скорость роста момента при преодолении провала напряжения | Проектом (работой ВЭУ в конкретной ВЭС) |
d^eniin | Ча«Л | Минимальный момент генератора | Типом ВЭУ |
dTuscaJe | Цигерном | Коэффициент масштабирования напряжения при сбросе момента | Проектом (работой ВЭУ в конкретной ВЭС) |
MpUVRT | Разрешение на режим управления мощностью при преодолении провалов напряжения (0 — управление реактивной мощностью. -1 — управление напряжением) | Проектом (работой ВЭУ в конкретной ВЭС) |
35
ГОСТ Р 54418.27.1—2019
Окончание таблицы 19
Обозначение | Базисная величина | Описание | Чем определяется |
^maxlMRT | Ограничение скорости роста момента при преодолении провала напряжения | Проектом (работой ВЭУ в конкретной ВЭС) | |
UDVS | Чоч | Предел напряжения для сохранения устойчивости к провалам напряжения постю глубоких падений напряжения | Проектом (работой ВЭУ в конкретной ВЭС) |
rDVS | с | Задержка времени после глубоких падений напряжения | Проектом (работой ВЭУ в конкретной ВЭС) |
5.6 5.5 Модель регулирования активной мощности ВЭУ типа 4А
Структурная схема модели показана на рисунке 32. параметры модели приведены в таблице 20.
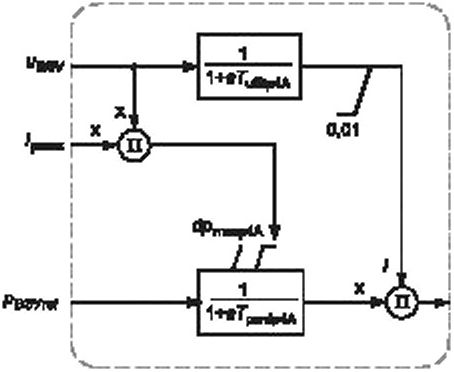
Рисунок 32 — Структурная схема модели управления активной мощностью ВЭУ типа 4А
Таблица 20 — Параметры модели регулирования активной мощности ВЭУ типа 4А
Обозначение | Базисная величина | Описание | Чем определяется |
Лл(йр4А | с | Постоянная времени фильтра измерения напряжения ВЭУ типа 4А | Типом ВЭУ |
ТрсгсЬДА | f | Постоянная времени задержки для сигнала уровня мощности ВЭУ типа 4А | Типом ВЭУ |
d^^niaxp4A | рии7с | Максимальная скорость роста мощности ВЭУ типа 4А | Проектом (работой ВЭУ в конкретной ВЭС) |
5.6.5.6 Модель регулирования активной мощности ВЭУ типа 4В
Структурная схема модели показана на рисунке 33. параметры модели приведены в таблице 21.
36
ГОСТ Р 54418.27.1—2019
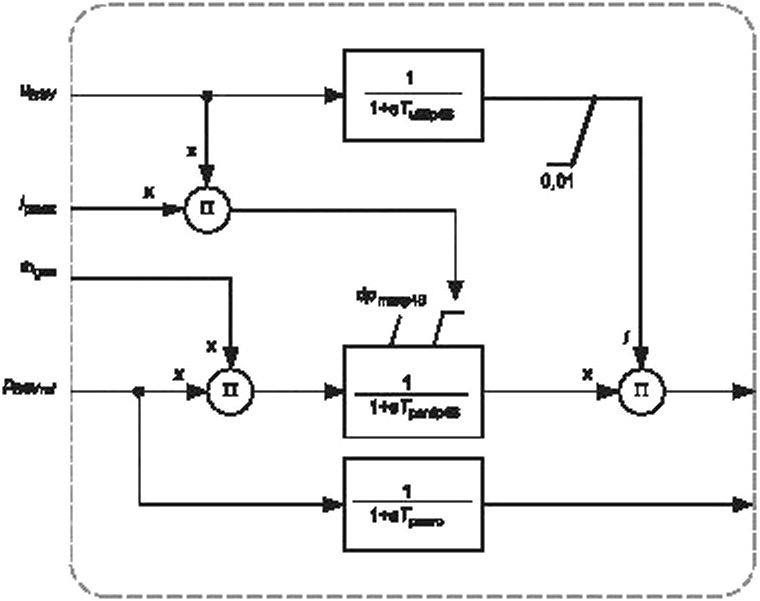
Примечание — В модели регулирования активной мощности ВЭУ типа 4 В предполагается, что т1ПЙ = pinjl, т. е. начальное значение <0^ равно 1.
Рисунок 33 — Структурная схема модели регулирования активной мощности ВЭУ типа 4 В
Таблица 21 — Параметры модели регулирования активной мощности ВЭУ типа 4В
Обозначение | Базисная величина | Описание | Чем определяется |
ТиГЛрДВ | с | Постоянная времени фильтра измерения напряжения ВЭУ типа 4В | ТИПОМ ВЭУ |
ТротфДВ | с | Постоянная времени задержки для сигнала уровня мощности ВЭУ типа 4В | Типом ВЭУ |
Гриего | с | Постоянная времени реакции аэродинамической мощности | Типом ВЭУ |
^шахрДВ | р^ | Максимальная скорость роста мощности ВЭУ типа 4В | Проектом (работой ВЭУ в конкретной ВЭС) |
5.6.5.7 Модель регулирования реактивной мощности
В модели регулирования реактивной мощности поддерживаются пять общих режимов регулирования М G, приведенных в таблице 22. и три режима регулирования при провалах напряжения MqUVRT. приведенных в таблице 23.
Таблица 22 — Общие режимы регулирования реактивной мощности ВЭУ (М^)
Обозначение режима | Описание |
0 | Регулирование напряжения |
1 | Регулирование реактивной мощности |
2 | Регулирование реактивной мощности в разомкнутом контуре (используется только с замкнутым контуром на уровне ВЭС) |
37
ГОСТ Р 54418.27.1—2019
Окончание таблицы 22
Обозначение режима | Описание |
3 | Регулирование коэффициента мощности |
4 | Регулирование коэффициента мощности в разомкнутом контуре |
Таблица 23 — Режимы регулирования реактивной мощности при провалах напряжения (MqUVRT)
Обозначен кие режима | Описание |
0 | Добавление реактивного тока в зависимости от напряжения |
1 | Регулируемое добавление реактивного тока в доаварийном режиме с дополнительным добавлением реактивного тока в зависимости от напряжения |
2 | Регулируемое добавление реактивного тока в доаварийном режиме с дополнительным добавлением реактивного тока в зависимости от напряжения в аварийном режиме и дополнительное увеличение на постоянное значение доаварийного реактивного тока в послеаварийном режиме |
Структурная схема модели регулирования реактивной мощности приведена на рисунке 34. ее параметры и режимы приведены в таблице 24.
В зависимости от режима регулирования реактивной мощности опорное значение £вэ/гог может быть либо опорным значением реактивной мощности, либо опорным значением разности напряжений как команда от регулятора. Если модель регулятора не используется, тогда в качестве начального значения этого сигнала принимается постоянная величина.
38
ГОСТ Р 54418.27.1—2019
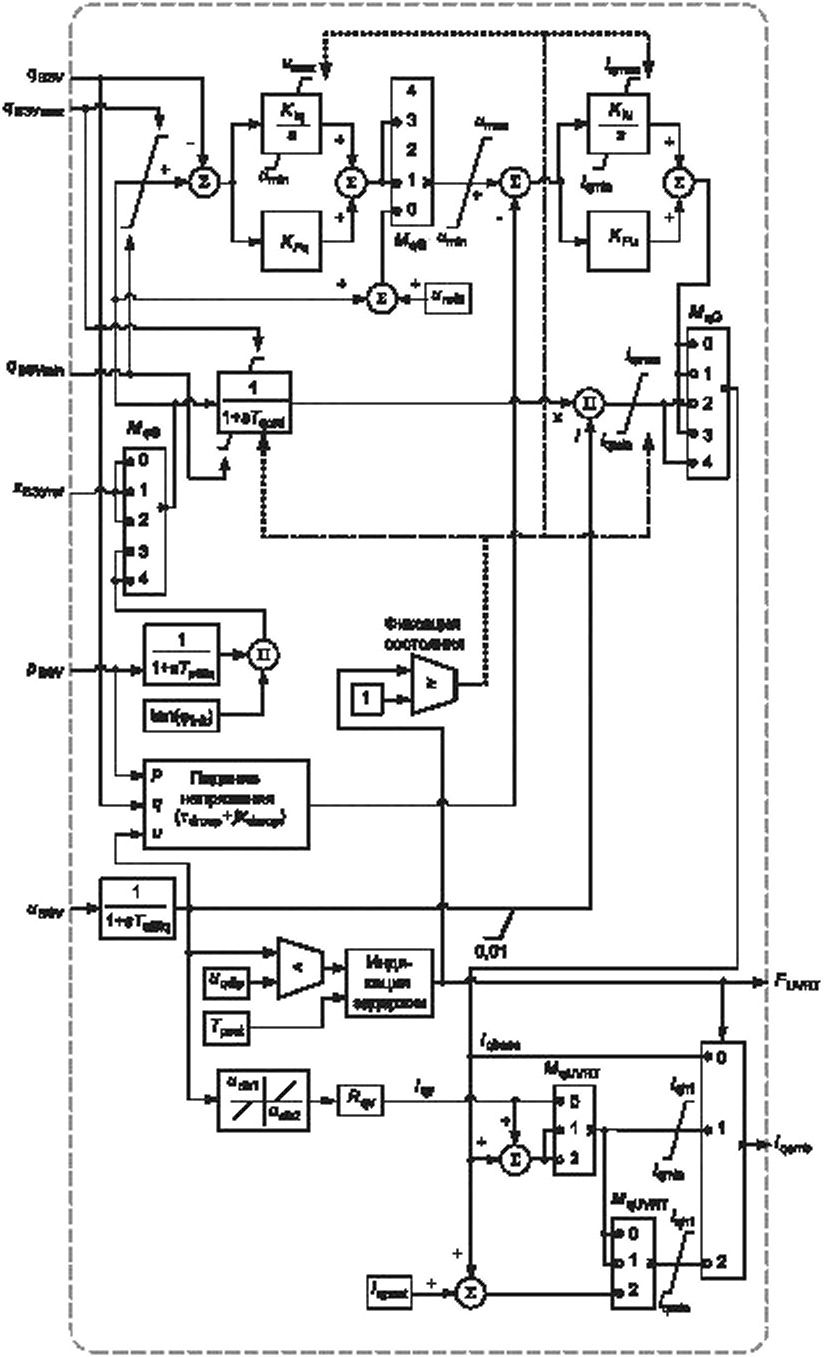
Примечания
1 Реализация функции «Фиксация состояния» приведена в приложении В.З.
2 Начальное значение lg(<fine) задается по параметрам потокораспределения мощности.
Рисунок 34 — Структурная схема модели регулирования реактивной мощности
39
ГОСТ Р 54418.27.1—2019
Таблица 24 — Параметры и режимы модели регулирования реактивной мощности
Обозначение | Базисная величина | Описание | Чем определяется |
qG | — | Общий режим регулирования реактивной мощности ВЭУ (см. таблицу 22) | Проектом (работой ВЭУ в конкретной ВЭС) |
4uVRT | — | Режим регулирования реактивной мощности при провалах напряжения (см. таблицу 23) | Проектом (работой ВЭУ в конкретной ВЭС) |
^оГЛе | С | Постоянная времени фильтра измерения напряжения | Типом ВЭУ |
ТрГЛе | с | Постоянная времени фильтра измерения мощности | Типом ВЭУ |
Ч | ЧсЛом | Коэффициент передачи пропорционального канала ПИ-регулятора реактивной мощности | Типом ВЭУ |
Черном* | Коэффициент передачи интегрального канала ПИ-регулятора реактивной мощности | Типом ВЭУ | |
«Ри | Аады' Цюм | Коэффициент передачи пропорционального канала ПИ-регулятора напряжения | Типом ВЭУ |
*lu | ^Ч^ | Коэффициент передачи интегрального канала ПИ-регулятора напряжения | Типом ВЭУ |
иаы | Чюм | Нижний предел зоны нечувствительности напряжения | Типом ВЭУ |
udb2 | Чем | Верхний предел зоны нечувствительности напряжения | Типом ВЭУ |
% | ^нс»/Ч«М | Коэффициент масштабирования для тока при провалах напряжения | Проектом (работой ВЭУ в конкретной ВЭС) |
и max | Максимальное напряжение в канале интегрирования ПИ-регулятора | Типом ВЭУ | |
Чпп | Минимальное напряжение в канале интегрирования ПИ-регулятора | Типом ВЭУ | |
Чыо | Чюм | Смещение опорного напряжения, определяемое пользователем. uref = огеЮ + Aytrof (используемое, когда 4g = М^) | Предшествующим установившимся режимом ВЭУ |
°0d₽ | Чюм | Порог напряжения для выявления провалов напряжения при регулировании реактивной мощности | Типом ВЭУ |
^qord | С | Постоянная времени для сигнала реактивной мощности | Типом ВЭУ |
Tpost | С | Время добавления послеаварийной реактивной мощности | Проектом (работой ВЭУ в конкретной ВЭС) |
’стал | тсм | Максимальный добавленный реактивный ток | Типом ВЭУ |
гОлнп | Минимальный добавленный реактивный ток | Типом ВЭУ | |
'oh1 | тем | Максимальный добавленный реактивный ток в продолжение провала напряжения | Типом ВЭУ |
'cucct | чпм | Добавленный послеаварийный реактивный ток | Проектом (работой ВЭУ в конкретной ВЭС) |
Гйгоор | ^base | Активная составляющая сопротивления при провале напряжения | Проектом (работой ВЭУ в конкретной ВЭС) |
*droop | ^base | Индуктивная составляющая сопротивления при провале напряжения | Проектом (работой ВЭУ в конкретной ВЭС) |
Примечание — При согласовании параметров u^,. ис112 и и^ф требуется предельная осторожность, чтобы не получить непреднамеренную реакцию из контура добавления реактивной мощности. | |||
Звено «Определение задержки» формирует показатель FUVRT одного из трех режимов функционирования ВЭУ, указанных в таблице 25.
40
ГОСТ Р 54418.27.1—2019
Таблица 25 — Описание значений показателя PUVRT
Индикация | Описание |
0 | Обычное функционирование (u > udo ) |
1 | Функционирование во время аварии (и S ийр ) |
2 | Послваварийный режим 2 с (и > udip ) в течение 1 = Г^^ |
Звено «Падение напряжения» выполняет расчет напряжения в точке, расположенной на расстоянии последовательного сопротивления г ♦ jx от выводов ВЭУ (обычно на обмотках трансформатора) по формуле
U = J ^ЗУ - 'droop —~ - *droop — - ^.oop —— - 'droop ■
v “ВЭУ “ВЭУ / k “ВЭУ “ВЭУ /
5.6.5.8 Модель ограничения тока
В модели ограничения тока совмещаются физические ограничения и пределы регулирования.
Структурная схема модели показана на рисунке 35. ее параметры приведены в таблице 26.
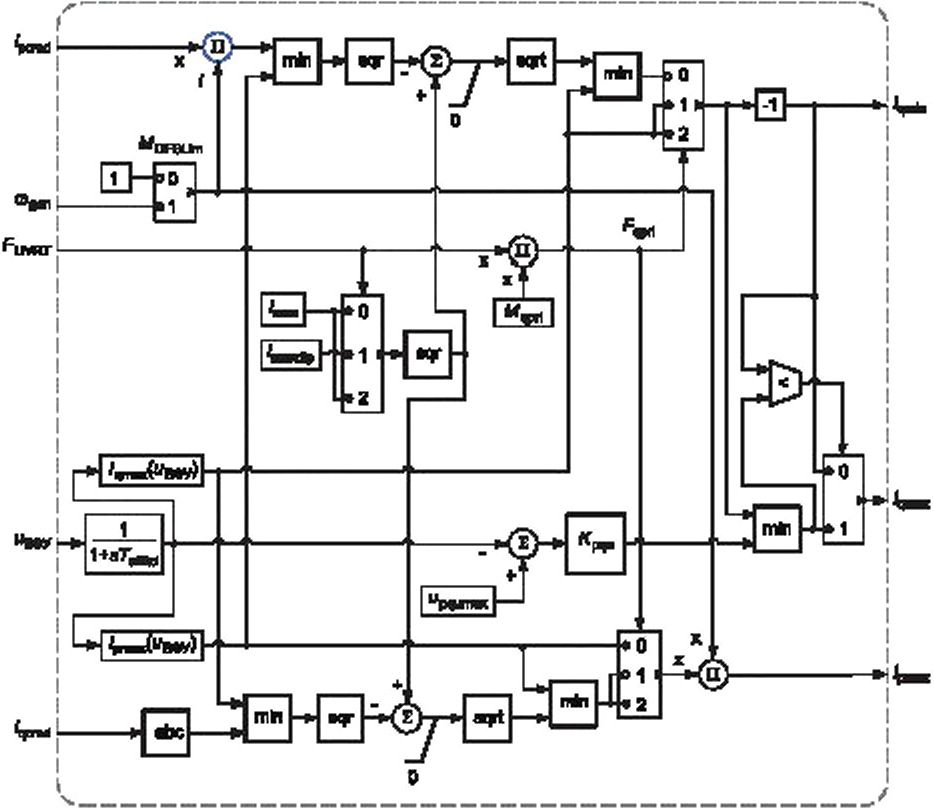
mm — минимум; sqr — квадрат; abs — абсолютное значение; sqrt — квадратный корень
Примечание — Для ВЭУ типа 4 входное значение it^wi не используется, что обеслечивается установкой
Mdfslh = 1-
Рисунок 35 — Структурная схема модели ограничения тока
41
ГОСТ Р 54418.27.1—2019
Таблица 26 — Параметры модели ограничения тока
Обозначение | Базисная величина | Описание | Чем определяется |
fmax | 4юм | Максимальное установившееся значение тока на выводах ВЭУ | Типом ВЭУ |
'maxdip | 'им | Максимальный ток на выводах ВЭУ при провале напряжения | Проектом (работой ВЭУ в конкретной ВЭС) |
^DFSLIm** | — | Ограничение тока статора ВЭУ типа 3 (0 — ограничение суммарного тока (ротора и статора). 1 — ограничение тока статора) | Типом ВЭУ |
— | Приоритет регулирования мощност в течение провалов напряжения (0 — приоритет активной мощности. 1 — приоритет реактивной мощности) | Проектом (работой ВЭУ в конкретной ВЭС) | |
'ртах (°ВЭУ) | 'мм ^ном) | Справочная таблица зависимости пределов активного тока от напряжения | Проектом (работой ВЭУ в конкретной ВЭС) |
'qmax (°ВЭу) | Справочная таблица зависимости пределов реактивного тока от напряжения | Проектом (работой ВЭУ в конкретной ВЭС) | |
Лины | с | Постоянная времени фильтра измерения напряжения | Типом ВЭУ |
"pqiniax | ^ом | Напряжение ВЭУ в точке схемы, куда может быть подан нулевой реактивный ток | Типом ВЭУ |
«РЧи | 'но*У ^ном | Частная производная предела реактивного тока по напряжению | Типом ВЭУ |
31 ^DTSUm = 1 Д™ ВЭУ ™ПЗ 4 | |||
5.6.5.9 Модель ограничения реактивной мощности
Структурная схема модели доказана на рисунке 36. параметры модели приведены в таблице 27.

Примечание — В модели ограничения реактивной мощности не используются индикация FUVRT и параметры и и р модели регулирования реактивной мощности.
Рисунок 36 — Структурная схема модели ограничения реактивной мощности
Таблица 27 — Параметры модели ограничения реактивной мощности
Обозначение | Базисная величина | Описание | Чем определяется |
^тах | Р мам | Максимальная реактивная мощность | Типом ВЭУ |
Фпп | р 1 нам | Минимальная реактивная мощность | Типом ВЭУ |
5.6.5.10 Модель ограничения реактивной и активной мощности или реактивной мощности и напряжения
Структурная схема модели показана на рисунке 37. параметры модели приведены в таблице 28.
42
ГОСТ Р 54418.27.1—2019
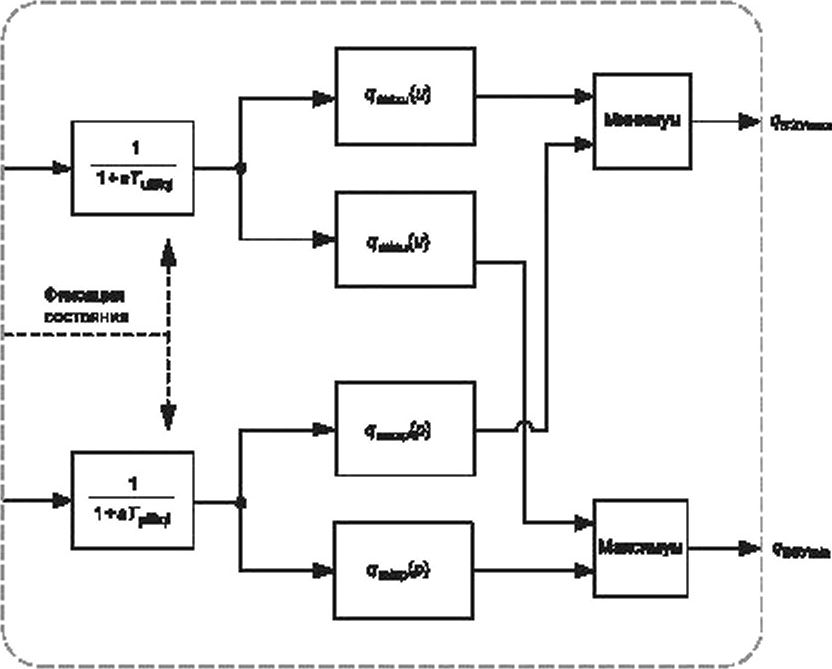
Рисунок 37 — Структурная схема модели ограничения реактивной и активной мощности или реактивной мощности и напряжения
Таблица 28 — Параметры модели ограничения реактивной и активной мощности или реактивной мощности и напряжения
Обозначение | Базисная величина | Описание | Чем определяется |
^uOlql | с | Постоянная времени фильтра измерения напряжения для реактивной мощности | Типом ВЭУ |
rpfitql | с | Постоянная времени фильтра измерения мощности для реактивной мощности | Типом ВЭУ |
^maxplP) | ^исм^иам) | Справочная таблица зависимости максимального предела реактивной мощности от активной мощности | Типом ВЭУ |
^minptP) | ^исм^ном) | Справочная таблица зависимости минимального предела реактивной мощности от активной мощности | Типом ВЭУ |
^inexu^ | Р^ном) | Справочная таблица зависимости максимального предела реактивной мощности от напряжения | Типом ВЭУ |
9minu(w) | ^ном^нам) | Справочная таблица зависимости минимального предела реактивной мощности от напряжения | Типом ВЭУ |
5.6.6 Модель защиты электрической сети
В модель защиты электрической сети включены защиты от повышения/понижения напряжения и повышения/понижения частоты. Защиты с независимой выдержкой времени характеризуются наличием нескольких ступеней срабатывания с соответствующими выдержками времени (при перенапряжении и пониженном напряжении, при повышенной и пониженной частоте), которые определяются и проверяются согласно ГОСТ Р 54418.21.
Примечание — Обычно при моделировании систем РЗА в электроэнергетике применяются консервативные подходы, предусматривающие срабатывание защиты при выходе хотя бы одного из параметров (напряжения
43
ГОСТ Р 54418.27.1—2019
или частоты) за пределы пороговых значений. В условиях эксплуатации реального оборудования при выходе параметров за пределы пороговых значений срабатывания защиты ВЭУ может не происходить.
Для представления специальных условий срабатывания в модель могут быть включены определяемые пользователем графики зависимостей напряжений или частот от времени. Для обеспечения плавности характеристик отключения выполняют интерполяцию указанных значений.
Структурная схема показана на рисунках 38 и 39. параметры модели приведены в таблице 29.
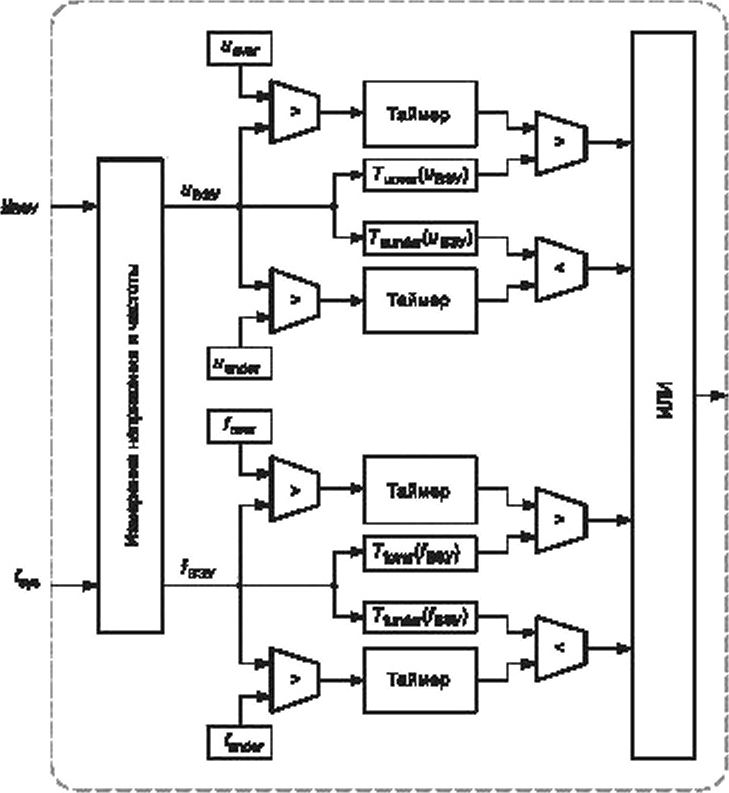
Примечание — Структура звена измерения напряжения и частоты показана на рисунке 39.
Рисунок 38 — Структурная схема модели защиты электрической сети
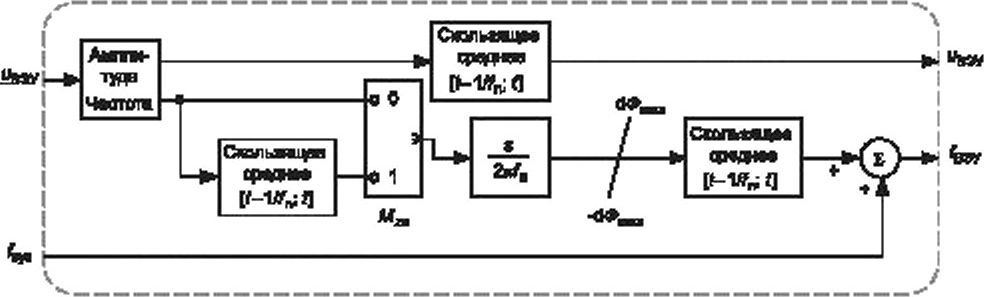
Примечание — Параметр fn является общим параметром моделей ВЭУ (см. таблицу 1).
Рисунок 39 — Структурная схема звена измерения напряжения и частоты
44
ГОСТ Р 54418.27.1—2019
Таблица 29 — Параметры модели защиты электрической сети
Обозначение | Базисная величина | Описание | Чем определяется |
uovcr | Порог срабатывания защиты по перенапряжению | Проектом (работой ВЭУ в конкретной ВЭС) | |
Лючи^ВЗу) | «4»J | Справочная таблица зависимости времени отключения от величины повышенного напряжения | Проектом (работой ВЭУ в конкретной ВЭС) |
°игх1к | Уном | Порог срабатывания защиты по пониженному напряжению | Проектом (работой ВЭУ в конкретной ВЭС) |
^□ипйсД^ВЭУ/ | с(^м) | Справочная таблица зависимости времени отключения от величины пониженного напряжения | Проектом (работой ВЭУ в конкретной ВЭС) |
^очег | 4юм | Порог срабатывания защиты по повышенной частоте | Проектом (работой ВЭУ в конкретной ВЭС) |
rftwer <ГВЭУ ) | C(AoJ | Справочная таблица зависимости времени отключения от повышения частоты | Проектом (работой ВЭУ в конкретной ВЭС) |
binder | Сюм | Порог срабатывания защиты по пониженной частоте | Проектом (работой ВЭУ в конкретной ВЭС) |
ЛиМе^ВЭУ ) | Справочная таблица зависимости времени отключения от понижения частоты | Проектом (работой ВЭУ в конкретной ВЭС) | |
Мхе | — | Режим измерения пересечения нуля (истина = 1. если в системе защиты для определения частоты применяется измерение пересечения нуля, и ложь = 0 в противном случае) | Типом ВЭУ |
^max | Максимальная скорость изменения частоты^ | Типом ВЭУ | |
TfMA | с | Временной интервал скользящего среднего61 | Типом ВЭУ |
a> tM»inax должно быть больше любого порогового уровня срабатывания защиты в энергосистеме. В настоящее время в нормативах некоторых сетей задается 0.5 Гц/с и предлагается принять значение 2.5 Гц'с. поэтому рекомендуется использовать с^Ф,^ = 5 Гц/с. ь> Обычные значения для оборудования защиты составляют от трех до пяти периодов линейного напряжения. | |||
При моделировании для каждой ступени защиты и соответствующей ей выдержки времени отключение ВЭУ происходит, когда значение измеряемого параметра остается выше/ниже уставки (порогового значения) непрерывно в течение всей выдержки времени. Повторное включение ВЭУ после срабатывания РЗА при моделировании не предусмотрено.
При применении модели реле с фиксированным временем может быть задана единственная пара значений параметров. При использовании конкретных зависимостей срабатывания пользователь может задать то количество пар параметров, которое имеется в справочных таблицах.
6 Проверка моделей
6.1 Общие положения
Проверка моделей основана на испытаниях ВЭУ по ГОСТ Р 54418.21 и не требует каких-либо дополнительных испытаний или процедур.
Возможная точность модели, определенная в соответствии с настоящим разделом, ограничена погрешностями модели, погрешностью измерений, а также общим характером моделей, устанавливаемых в настоящем стандарте, который не в состоянии представить полностью детали ВЭУ конкретных изготовителей. Более подробно оценка пределов возможной точности моделей изложена в приложении D.
Порядок проверки модели не задает последовательность проверки от модели к модели. Однако в случае сходных ВЭУ проверка модели для одной ВЭУ (конкретного варианта ВЭУ данного типа) может быть распространена на другие ВЭУ при условии, что изготовитель ВЭУ представит соответствующее обоснование.
45
ГОСТ Р 54418.27.1—2019
Примечание — Существуют ситуации, когда вследствие обслуживания, различных условий места установки, изменения номинальных показателей или обновления оборудования могут быть изменены механические части ВЭУ. Типичными примерами этого являются установка нового мультипликатора, изменение лопастей или их длины или изменение высоты башни. Такие изменения механических частей ВЭУ обычно существенно не влияют на переходные электрические характеристики генератора ВЭУ. В этом отношении ВЭУ рассматриваются как сходные, если типы ВЭУ и их схемы управления одинаковы и если все конкретное оборудование, оказывающее существенное воздействие на переходные электрические характеристики ВЭУ. является одинаковым (т. е. преобразователь, замыкающее устройство, тормозной ограничитель и все оборудование защиты от провалов напряжения). Другими примерами сходных ВЭУ в отношении порядка проверки модели являются ВЭУ с различными номиналами первичных обмоток трансформаторов. ВЭУ с вегроколесами/роторами различных диаметров. ВЭУ с различными изготовителями компонентов и ВЭУ с различными номинальными показателями.
Изготовитель ВЭУ может представить обоснование, которое получено в результате использования подробной трехфазной модели конкретного оборудования. В тех случаях, когда в результате подробного моделирования установлено, что изменение материала существенно не влияет на электрические характеристики ВЭУ, нет необходимости в проведении новых натурных испытаний и измерений.
Порядок проверки может также использоваться для проверки других, не установленных в настоящем стандарте, моделей ВЭУ основной частотой.
6.2 Общие требования
Точность результатов проверки модели должна быть достаточной для использования модели ВЭУ для различных оценок устойчивости энергосистемы и расчетов планируемых проектов.
При наличии результатов испытаний, полученных до даты опубликования настоящего стандарта, или результатов других испытаний, установленных в ГОСТ Р 54418.21. относящихся к тому же рабочему диапазону значений параметров ВЭУ. такие результаты могут быть приняты для проверки модели при условии, что они получены и задокументированы в соответствии с требованиями ГОСТ Р 54418.21.
Проверка модели должна по меньшей мере включать:
- проверку реакции модели на провалы напряжения;
- проверку реакции модели на пошаговые изменения опорных значений;
- проверку функционирования модели защиты электрической сети.
Примечание — Проверка реакция модели на пошаговые изменения опорных значений предполагает наличие интегрирующего звена, которое обеспечивает достижение опорного значения.
Измеренные и имитируемые значения должны относиться к одним и тем же выводам ВЭУ. Согласно ГОСТР 54418.21 эти выводы задаются изготовителем и могут быть;
- стороной низкого напряжения трансформатора;
- стороной высокого напряжения трансформатора.
Смоделированные значениям прямой последовательности должны проверяться на соответствие измеренным значениям прямой последовательности.
Для моделей, включающих составляющие обратной последовательности, в дополнение к проверке соответствия составляющих прямой последовательности должна проводиться проверка соответствия измеренным значениям смоделированных значений составляющих обратной последовательности.
Для каждого измерения, включенного в порядок проверки модели, должен быть составлен план испытаний.
Результаты проверки модели должны включать:
- временные ряды измеренных и смоделированных значений показателей основной частоты;
- временные ряды ошибок между смоделированными и измеренными значениями токов и напряжений основной частоты;
- среднюю, среднюю абсолютную и максимальную ошибку для доаварийных. аварийных и посло-аварийных периодов при провалах напряжения;
- измеренные и смоделированные значения времени отклика, времени нарастания и времени регулирования (достижения установившегося значения) при изменениях опорных значений:
- измеренные и смоделированные значения уровней защиты и времен отключения защиты электрической сети;
- определение области применения модели, прошедшей проверку.
Примечание — Под областью применения модели имеются в виду ситуации, в которых применима модель.
46
ГОСТ Р 54418.27.1—2019
Сбор данных и значений для визуального представления должен проводиться с дискретностью не менее 10 мс. Если требуется представление составляющих прямой, обратной или нулевой последовательностей основной частоты, тогда визуальное представление измеренных и смоделированных значений должно быть выполнено согласно ГОСТ Р 54418.21.
Для расчета отклонений между измеренными и смоделированными значениями для этих двух наборов данных должна быть установлена общая временная шкала. Такая общая временная шкала может быть получена при помощи синхронизации, прореживания или интерполяции временных последовательностей отобранных значений показателей.
Любыми высокочастотными эффектами электромагнитного происхождения, длящимися, например. менее одного периода, пренебрегают, поскольку они выходят за границы установленных в настоящем стандарте моделей. Например, высокочастотные затухающие колебания, включающие вторую и более высокие гармоники (пусковые токи трансформатора и т. п.), находятся вне диапазона частот, относящегося к изучению устойчивости.
Для получения полного набора ошибок в том случае, когда измеренное значение не имеет соответствующего смоделированного значения, должно использоваться интерполированное значение.
Измеренные, преобразованные и смоделированные значения следует представлять в относительных единицах, принимая одноименные номинальные параметры в точке измерения за базовые величины (см. раздел 4).
Проверка модели должна быть выполнена по одному из двух методов. По первому методу (метод полной имитации энергосистемы) моделируют ВЭУ. а также имеется эквивалентное представление энергосистемы и взаимодействия между энергосистемой и ВЭУ. По второму методу (метод воспроизведения) моделируют только ВЭУ и один из измеренных сигналов (обычно напряжение) воспроизводится в модели, а другие измеренные параметры (обычно активный и реактивный ток и активная и реактивная мощность) проверяются на соответствие полученным смоделированным величинам.
Примечание — Для подтверждения устойчивости модели следует использовать метод полной имитации энергосистемы. Проверка модели методом воспроизведения снижает неопределенности, связанные с моделированием энергосистемы и испытательного оборудования, и рекомендуется для оценки точности модели. При проверке регулирования напряжения метод воспроизведения следует применять с осторожностью.
Все выполненные варианты испытаний, все результаты проверки модели должны быть зафиксированы. Пример формы отчета приведен в приложении Е.
6.3 Проверка реакции модели на провалы напряжения
6.3.1 Общие положения
Проверку выполняют в соответствии с ГОСТ Р 54418.21.
В ГОСТ Р 54418.21 определены шесть вариантов испытаний по воздействию провалов напряжения на ВЭУ. включающие симметричные и несимметричные провалы напряжения, указанные в ГОСТ Р 54418.21—2011, таблица 1. Каждый вариант испытаний характеризуется количеством затронутых фаз. а также значением и продолжительностью провала напряжения.
Для каждого варианта испытаний должно быть выполнено по меньшей мере одно измерение.
Примечания
1 В будущих редакциях ГОСТ Р 54418.21 магуг быть определены другие варианты испытаний на воздействие провалов напряжения.
2 Ограничением моделей прямой последовательности является го. что в них отсутствует реакция на составляющие обратной и нулевой последовательностей.
6.3.2 Измеряемые входные переменные
Для каждого варианта испытания на воздействие провалов напряжения измеряют в соответствии с ГОСТР 54418.21 значения следующих входных переменных:
- временные ряды значений напряжения и активного и реактивного токов прямой последовательности основной частоты;
- дополнительные временные ряды значений напряжения и активного и реактивного токов обратной последовательности основной частоты в том случае, когда в модели представлены составляющие обратной последовательности:
- время начала аварии rfaulJ (время, задающее первый случай короткого замыкания одной из фаз);
- время начала ликвидации аварии tcleaf (время, задающее первый случай ликвидации короткого замыкания одной из фаз).
Все переменные определяются на выводах ВЭУ.
47
ГОСТ Р 54418.27.1—2019
6.3.3 Обработка сигналов
Для обеспечения того, чтобы проверка модели отражала реальные свойства модели с учетом требований 5.2 к полосе пропускания, установлена процедура обработки сигналов. Процедура обработки сигналов для метода воспроизведения показана на рисунке 40. для метода полной имитации энергосистемы — на рисунке 41.
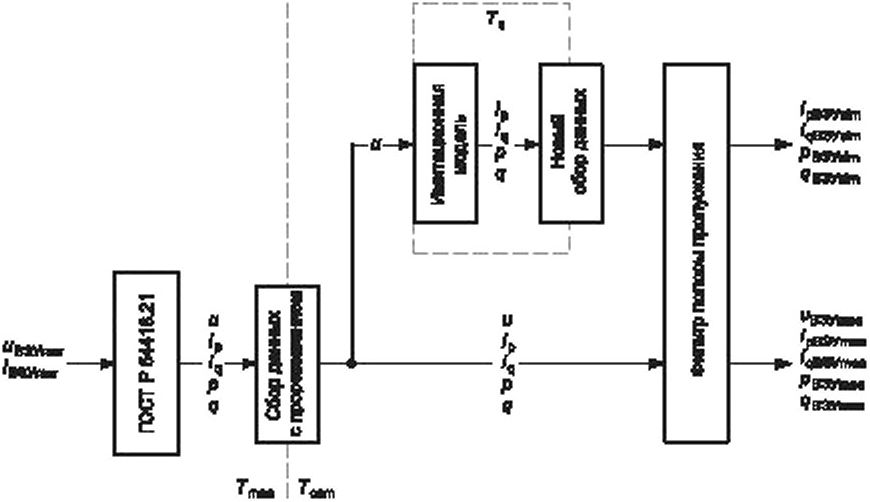
Рисунок 40 — Структура обработки сигналов при применении метода воспроизведения
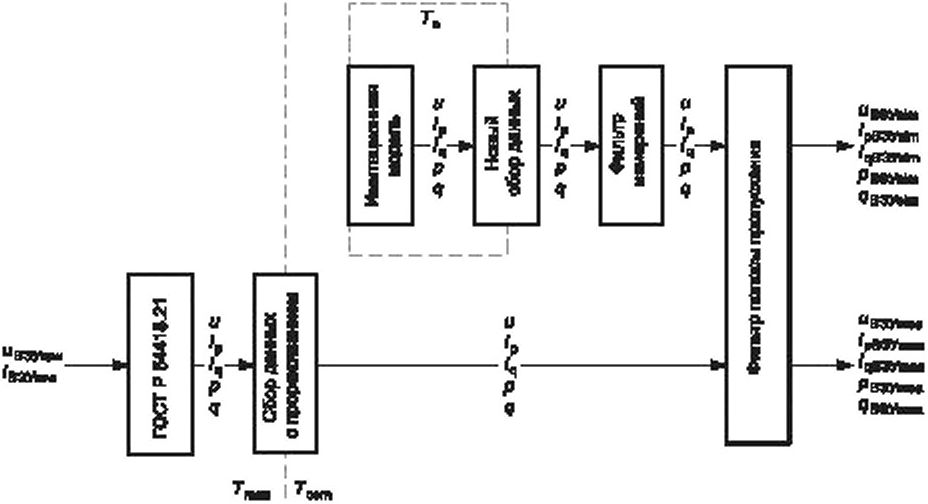
Рисунок 41 — Структура обработки сигналов при применении метода полной имитации энергосистемы
На этих рисунках Tmea обозначена скорость сбора необработанных измеренных данных (графиков тока и напряжения). ТСО1П — общее время сбора данных, используемое для сравнения измеренных и смоделированных значений, и Г, — шаг интегрирования по времени в рассматриваемой имитационной модели. В моделях с фиксированным шагом интегрирования по времени ГСОП) = Т.. Для моделей, использующих переменный шаг интегрирования по времени, для завершающей проверки соответствия требуется выполнить повторный сбор выходных данных имитационной модели со временем Гсот.
Прореживание данных от Гтм до Гсо|п может быть выполнено как составная часть расчета составляющих прямой и. если требуется, обратной последовательности согласно ГОСТР 54418.21.
48
ГОСТ Р 54418.27.1—2019
Примечание — Для того, чтобы избежать значительного алиасинга, обусловленного прореживанием данных, предполагается, что полоса пропускания для Гтеа достаточно мала.
Блок «Фильтр полосы пропускания» является фильтром низкой частоты второго порядка с критическим затуханием. Частота среза fcul равна 15 Гц и соответствует полосе пропускания моделей (см. 5.2). Описание фильтра приведено в приложении F.
Блок «Фильтр измерений», включенный в структуру обработки сигналов метода полной имитации энергосистемы, реализован как расчет скользящего среднего с временем осреднения, равным одному периоду линейных характеристик. При моделировании этот фильтр обеспечивает фильтрацию измеренных значений, задаваемую расчетом составляющих последовательностей основной частоты согласно ГОСТ Р 54418.21.
Примечание — В структуру обработки сигнала для метода воспроизведения фильтр измерений не включается, поскольку искажение входного напряжения является измеренным напряжением, которое уже отфильтровано согласно ГОСТ Р 54418.21.
Все выходные параметры после преобразования сигнала представляют в относительных единицах, принимая за базовые величины одноименные номинальные параметры (см. раздел 4).
Для каждой определенной на выводах ВЭУ переменной, проверку соответствия которой необходимо провести (и. /р, fq, р и р). по временным рядам обработанных измеренных значений х|Пеа(л) и смоделированных значений xsim(n) определяется временной ряд ошибок хЕ(п) по формуле
Мл)= ^sim (л)- *тез (Л)- (7)
По временным рядам ошибок для каждой переменной для каждого заданного временного интервала определяют три показателя: максимальную ошибку, среднюю ошибку и среднюю абсолютную ошибку.
Максимальная ошибка в основном характеризует переходные характеристики модели, но также может указывать на большие ошибки стационарного состояния. Максимальная ошибка определяется с учетом диапазона допусков модели в пределах требуемой полосы пропускания.
Максимальная ошибка хМХЕ во временном интервале с N шагами по времени рассчитывается как максимальное значение абсолютных ошибок во всем временном интервале:
*mxe = тах(|хЕ (1)|.|хЕ (2) |хЕ (/ф (8)
Средняя ошибка в основном характеризует стационарные состояния модели до. после и во время аварии и включает абсолютный диапазон допусков отклонения энергии между измеренными и смоделированными значениями.
Средняя ошибка хМЕ во временнбм интервале рассчитывается как среднее значение ошибок во всем временнбм интервале
Z И
%ме=£^М ' (9)
Средняя абсолютная ошибка в основном характеризует стационарные состояния модели до. после и во время аварии и включает полосу максимального абсолютного допуска среднего отклонения между измеренными и смоделированными значениями.
Средняя абсолютная ошибка хМАЕ во временнбм интервале рассчитывается как среднее значение абсолютных ошибок во всем временнбм интервале:
Ц*еН
*МАЕ=^--■ (Ю)
6.3.4 Определение временных интервалов
Для того чтобы выполнить проверку соответствия характеристик модели для любого заданного испытания, данные измерений должны быть представлены в трех смежных временных интервалах, показанных на рисунке 42.
49
ГОСТ Р 54418.27.1—2019
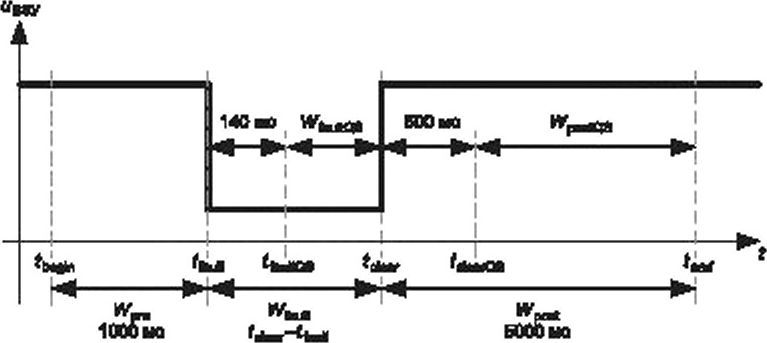
Рисунок 42 — Временные интервалы провала напряжения
Эти три временных интервала определяются следующим образом:
' %ге — доаварийный интервал времени от rbcpjn до х rfau)l:
■ ^«uu — интервал времени аварии от tfaul, до х rcteaf;
" %о« — интервал времени аварии от ?с1оаг до х fend. где. как правило. fbegin = f(aull. - 1000 мс и fcnd = fctear ♦ 5000 мс.
Примечание — В том случае, когда до аварии происходит включение последовательного сопротивления. время fbegln должно начинаться после того, как завершится переходный процесс, обусловленный таким переключением.
За временами t)ault и tcleaf следуют интервалы измеряемых электромагнитных переходных процессов. которые не включаются в модели основной частоты. Вместо определения численных значений максимальных ошибок при переходных процессах в интервалах Wfauu и Wpost численные значения максимальной абсолютной ошибки хМХА определяются в следующих квазистационарных подынтервалах.
' ^iihos “ квазмстационарная часть интервала во время аварии в период времени от rfau(tQS до 'clear ГД® kuHQS = 'fault + 140 МС;
-хМАЕ — квазистационарная часть интервала после аварии в период времени от 'C|MfQS до ferld, w 'cleans = 'clear + 500 МС
Примечания
1 Исключение первых 140 мс интервала W(au>, из Wfau)[QS в основном обусловлено неспособностью модели воспроизвести составляющую постоянного тока в потоке генератора.
2 Исключение первых 500 мс интервала lVpi;et из Hp3.tQS обусловлено ограничениями модели. На точность представления реактивной мощности влияет пусковой ток трансформатора, который в некоторых случаях гложет длиться более 500 мс. На точность представления восстановления реактивной мощности влияют нелинейные аэродинамические эффекты и колебания скорости ветра.
Расчетные временные интервалы для расчетных значений ошибок представлены в таблице 30.
Таблица 30 — Временные интервалы для расчета ошибок
Период | *ЫХЕ | ХЫЕ | 'МАЕ |
До аварии | IV pre | ||
Авария | ^hos” | ^fauHOS | |
После аварии | W^tos | Чоя | |
а| Если в каком-либо конкретном случае Wfaun составляет менее 240 мс и соответственно Wfau)l<;is составляет менее 140 мс. тогда в этом случае xt<KE в период аварии не рассчитывается. | |||
6.4 Проверка реакции модели на изменение опорных значений
6.4.1 Общие положения
Варианты испытаний определены 8 ГОСТ Р 54418.21. При проверке соответствия в каждом испытании изменения опорного значения должно быть проведено по меньшей мере одно измерение.
50
ГОСТ Р 54418.27.1—2019
Согласно ГОСТ Р 54418.21—2011. рисунок 1. определяют пять вариантов пошагового изменения опорного значения активной мощности. При проверке соответствия следует использовать только те варианты, где доступная аэродинамическая мощность превосходит опорное значение активной мощности. Таким образом, из указанных пяти вариантов шага применяют только три варианта. Согласно ГОСТ Р 54418.21—2011. рисунок 2. так же определяют три варианта пошагового изменения опорного значения реактивной мощности.
Примечание — 8 будущих редакциях ГОСТ Р 54418.21 могут быть определены другие варианты испытаний на изменение опорных значений, например регулирование напряжения.
Испытания и последующее использование для проверки соответствия модели следует проводить только для тех опорных значений, изменение которых влияет на работу регулятора ВЭУ.
6.4.2 Измеряемые входные переменные
Для каждого варианта шага каждого испытываемого опорного значения измеряют в соответствии с ГОСТР 54418.21 значения следующих входных переменных:
- временные ряды основной частоты составляющих прямой последовательности переменной, для которой проводят проверку изменения опорного значения;
- временные ряды напряжения прямой последовательности основной частоты;
- временные ряды опорного значения, синхронизированные с временными рядами отклика.
Всо измерения проводят на выводах ВЭУ.
Измерения проводят во временном интервале, который начинается за одну секунду до изменения опорного значения и заканчивается через одну секунду после времени регулирования.
6.4.3 Моделирование
Входными значениями для имитационной модели являются:
- временные ряды измеренного опорного значения;
- напряжение энергосистемы.
Имитационное моделирование проводят для каждого из выполненных измерений изменения опорного значения. Для каждого из тех вариантов испытаний, где это необходимо, рассчитывают время нарастания, время отклика и время регулирования (время достижения установившегося значения).
Примечание — Определение временя отклика, времени нарастания и времени регулирования необходимо только в тех случаях, когда опорное значение изменяется пошагово и регулятор отклика включает звено интегрирования.
6.5 Проверка модели защиты электрической сети
6.5.1 Общие положения
Проверку функционирования защиты электрической сети выполняют в соответствии с ГОСТ Р 54418.21 по двум параметрам:
- уровень срабатывания;
- время отключения.
Для проверки защиты электрической сети (как уровней срабатывания, так и времени отключения) используют моделирование во времени с измерением времени отключения.
Примечание — В ГОСТ Р 54418.21 процедура проверки защиты электрической сети включает два этапа: проверку уровней защиты и определение соответствующих времен отключения.
При проверке модели должно быть проведено по меньшей мере по одному испытанию защиты от повышения/понижения напряжения, защиты от ловышения/понижения частоты.
6.5.2 Проверка защиты от повышения напряжения
а) Начинают моделирование при номинальных значениях напряжения и частоты. Затем устанавливают напряжение выше верхнего значения напряжения срабатывания на 1 % и продолжают моделирование до момента срабатывания защиты от перенапряжения. Регистрируют время от момента повышения напряжения до момента срабатывания защиты.
Ь) Начинают моделирование при номинальных значениях напряжения и частоты, затем устанавливают напряжение ниже верхнего значения напряжения срабатывания на 1 % и продолжают моделирование до расчетного времени отключения защиты от перенапряжения, увеличенного на время запаса. Защита не должна срабатывать.
Примечания
1 Значительное повышение напряжения может привести к появлению неосновных составляющих напряжения. которые влияют на работу реальной защиты, но которые не представлены в модели прямой последовательности основной частоты.
2 Время запаса должно быть меньше, чем разница между испытываемым временем отключения и следующим временем отключения.
51
ГОСТ Р 54418.27.1—2019
6.5.3 Проверка защиты от понижения напряжения
а) Начинают моделирование при номинальных значениях напряжения и частоты, затем устанавливают напряжение меньше нижнего значения напряжения срабатывания на 1 % и продолжают моделирование до момента срабатывания защиты от понижения напряжения. Регистрируют время от момента понижения напряжения до момента срабатывания защиты.
Ь) Начинают моделирование при номинальных значениях напряжения и частоты, затем устанавливают напряжение выше нижнего значения напряжения срабатывания на 1 % и продолжают моделирование до расчетного времени отключения защиты от понижения напряжения, увеличенного на время запаса. Защита не должна срабатывать.
6.5.4 Проверка защиты от повышения частоты
а) Начинают моделирование при номинальных значениях напряжения и частоты, затем устанавливают частоту выше верхнего значения частоты срабатывания на 0.1 Гц и продолжают моделирование до момента срабатывания защиты от повышения частоты. Регистрируют время от момента повышения частоты до момента срабатывания.
Ь) Начинают моделирование при номинальных значениях напряжения и частоты, затем устанавливают частоту ниже верхнего значения частоты срабатывания на 0.1 Гц и продолжают моделирование до расчетного времени отключения защиты от повышения частоты, увеличенного на время запаса. Защита не должна срабатывать.
6.5.5 Проверка защиты от понижения частоты
а) Начинают моделирование при номинальных значениях напряжения и частоты, затем устанавливают частоту ниже нижнего значения частоты срабатывания на 0.1 Гц и продолжают моделирование до момента срабатывания защиты от понижения частоты. Регистрируют время от момента понижения частоты до момента срабатывания защиты.
Ь) Начинают моделирование при номинальных значениях напряжения и частоты, затем устанавливают частоту выше нижнего значения частоты срабатывания на 0.1 Гц и продолжают моделирование до расчетного времени отключения защиты от понижения частоты, увеличенного на время запаса. Защита не должна срабатывать.
52
ГОСТ Р 54418.27.1—2019
Приложение А (справочное)
Упрощенная модель ветроэнергетической станции
АЛ Общие положения
Современные ВЭС иогут включать от десятков до сотен отдельных ВЭУ. Обычно для управления характеристиками ВЭС применяется приоритетный контроль уровня ВЭС. который передает команды регулирования активной и реактивной мощности или напряжения на отдельные ВЭУ. Для применения общих моделей ВЭУ. установленных в разделе 5. при моделировании больших ВЭС необходимо упрощенное представление управления уровня ВЭС. В связи с этим в приложении приводится упрощенная модель управления ВЭС. Она включает модель регулирования напряжения (реактивной мощности) и модель регулирования частоты (активной мощности).
А.2 Область применения
Представленная упрощенная модель управления ВЭС относится только к характеристикам напряжения и активной и реактивной мощности, поскольку они являются наиболее важными с точки зрения изучения устойчивости переходных процессов в крупномасштабных энергетических системах.
Представленные модели предназначены для использования с моделями генераторов ВЭУ типов 3 (см. 5.5.4) и 4 (см. 5.5.5). В этих типах ВЭУ применяют электронные преобразователи, которые могут осуществлять постоянное регулирование напряжения на выводах. Генераторы ВЭУ типов 1 и 2 такими возможностями не располагают.
Типичным применением для данной модели управления ВЭС является такое, где вся ВЭС представляет набор некоторого количества одинаковых ВЭУ. При этом также требуется представить соответствующий эквивалент системы сбора электроэнергии.
А.З Описание модели регулятора напряжения (реактивной мощности)
На рисунке А.1 представлена структурная схема части регулятора системы управления ВЭС. отвечающей за регулирование реактивной мощности. Параметры этой модели представлены в таблице А.1. На выходе регулятора ВЭС образуется выходной опорный сигнал для ВЭУ х^р который используется в качестве входного сигнала в модели регулирования реактивной мощности (см. 5.6.5.7). В зависимости от конфигурации ВЭУ сигнал хяГ может представлять либо опорное напряжение, либо опорную реактивную мощность.
Примечание — В зависимости от режима ВЭУ. определяемого переключателем Ц. (см. рисунок 34), который задает интерпретацию опорных значений от ВЭС либо как опорного напряжения, либо как опорной реактивной мощности, необходимо оценить потокораспределение мощности, а также режим регулятора ВЭС MWPu (см. рисунок С.1), который определяет напряжение, когда на регулятор ВЭС подается опорная реактивная мощность.
Значение 1д(ФлрЛ|1) должно быть задано по параметрам потохораспрвделения мощности.
53
ГОСТ Р 54418.27.1—2019
4»W -
Mw»^
0
Pw
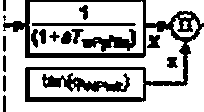
{^^■J|. ^--а
* и
I L—
8
**г -
1
”(IW^
^W
Мм^ ^^
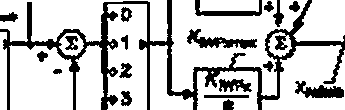
4шмц»
D
Wjf
^^JF ^Mtw ХяЛмх
I *м*ж*и :
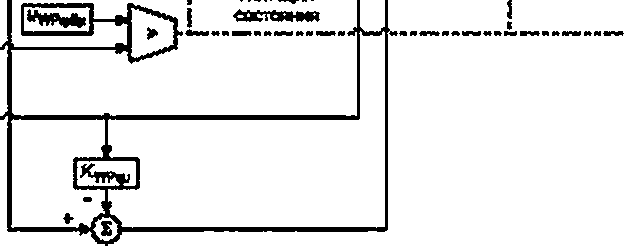
Рисунок А. 1 — Структурная схема регулятора реактивной мощности ВЭС
Таблица А. 1 — Параметры модели регулирования по напряжению (реактивной мощности)
с**т^
Обозначение | Базисная вали* мима | Описание | Чем определяется |
refma< | p или tA™. | Максимальное значение xref (Ф^ или Am^), запрашиваемое or регулятора ВЭС | Предшествующим установившимся ре-жимом ВЭС |
Refrain | Г’,.-., или | Минимальное значение хге( (qTre[ или Адге(). запрашиваемое от регулятора ВЭС | Проектом |
Lcn | с | Постоянная времени упреждения в передаточной функции опорного значения | Проектом |
с | Постоянная времени задержки в передаточной функции опорного значения | Проектом | |
XPWPx | — | Коэффициент передачи пропорционального канала в регуляторе реактивной мощности ВЭС | Проектом |
KfWPx | с~’ | Коэффициент передачи интегрального канала в регуляторе реактивной мощности ВЭС | Проектом |
*WPqu | ^BOCMCM^eactKM | Коэффициент занижения напряжения ВЭС | Проектом |
^WPufttq | с | Постоянная времени фильтра при измерении напряжения | Проектом |
rWPtfltq | с | Постоянная времени фильтра при измерении реактивной мощности | Проектом |
^WPprtltq | с | Постоянная времени фильтра при измерении активной мощности | Проектом |
54
Окончание таблицы А. 1
ГОСТ Р 54418.27.1—2019
Обозначение | Базисная величина | Описание | Чем определяется |
^uqWl | с | Постоянная времени фильтра для реактивной мощности. зависящей от напряжения | Проектом |
“WPqdfp | ^ВЭСнсм | Пороговое значение напряжения для обнаружения провалов напряжения при регулировании реактивной мощности | Проектом |
Фд-Р^егг ) | ^иом'^вЭСном | Таблица для статического режима при регулировании реактивной мощности и напряжения | Проектом |
KWPq ref | РВЭСном/Рном | Коэффициент усиления для опорного значения реактивной мощности | Проектом |
^ЧуРх max | РВЭС.кж/Рнзм/с | Максимальное опорное значение реактивной мощности1 напряжения после интегрирования | Проектом |
KWPx mm | РВЭСном/Ржж/с | Минимальное опорное значение реактивной мощно-сти/напряжения после интегрирования | Проектом |
«ЧеГпмх | РВЭСно*/с | Максимальная скорость положительного нарастания для опорного значения реактивной мощности/напря-жения ВЭС | Проектом |
^refmn | РВЭСни./с | Максимальная скорость отрицательного нарастания для опорного значения реактивной мощносги/напря-жения ВЭС | Проектом |
^WPqmode | Режим регулятора управления реактивной мощностью/ напряжением (0 — опорное значение реактивной мощности. 1 — опорное значение коэффициента мощности. 2 — статический режим при регулировании реактивной мощности. 3 — управление по напряжению) | Предшествующим установившимся режимом ВЭС |
А.4 Описание модели регулятора частоты (активной мощности}
На рисунке А.2 предсгавлена структурная схема части регулятора ВЭС. отвечающая за регулирование активной мощности. Параметры данной модели представлены в таблице F.2. На выходе регулятора ВЭС образуется выходной опорный сигнал для ВЭУ PKf. который является входным сигналом для моделей управления ВЭУ по активной мощности на рисунках 30. 32 и 33.
При регулировании по активной мощности ВЭУ типа 3 на рисунке 30 уровень p,ef всегда должен быть равен или превосходить определенный в таблице 10 уровень р.^.
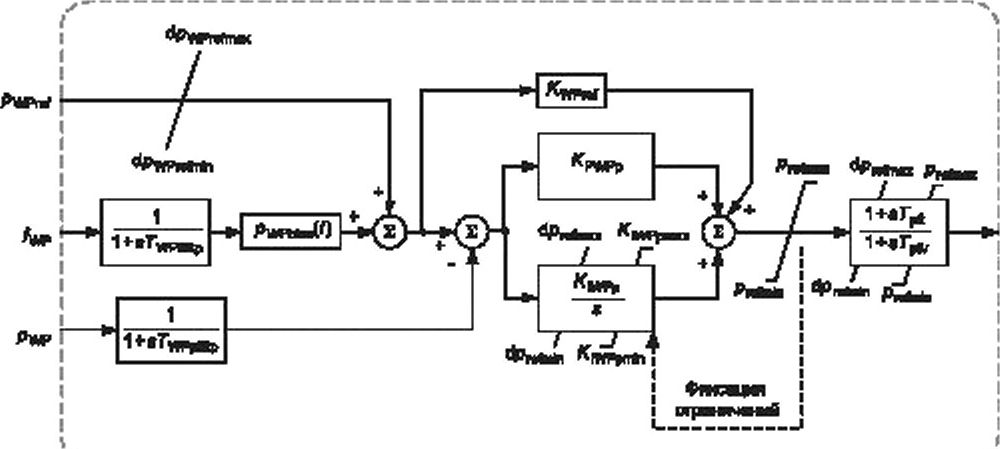
Рисунок А.2 — Структурная схема регулятора активной мощности ВЭС
55
ГОСТ Р 54418.27.1—2019
Т а б л и ц а А.2 — Параметры в модели регулирования по частоте (активной мощности)
Обозначение | Базисная величина | Описание | Чем определяется |
ГЛРрЛПр | с | Постоянная времени фильтра при измерении активной мощности | Проектом |
TwPffHp | с | Постоянная времени фильтра при измерении частоты | Проектом |
PWPbaJ^ | PnWF^>ic»J | Справочная таблица зависимости мощности от частоты | Проектом |
dPWPrt*nax | ^ВЭСно*/^ | Максимальная скорость положительного нарастания для опорного значения мощности ВЭС | Проектом |
dPMProfiran | РВХ»а^'{ | Максимальная скорость отрицательного нарастания для опорного значения мощности ВЭС | Проектом |
K^Ppref | рвэс.оЛ« | Коэффициент усиления для опорного значения мощности | Проектом |
XPWPp | Коэффициент передачи пропорционального канала регулятора управления ВЭС по активной мощности | Проектом | |
K|WPp | с-1 | Коэффициент передачи интегрального канала регулятора управления ВЭС по активной мощности | Проектом |
с | Постоянная времени упреждения в передаточной функции опорного значения | Проектом | |
^pfv | с | Постоянная времени задержки в передаточной функции опорного значения | Проектом |
dPrefmax | Максимальная скорость нарастания сигнала р^ от регулятора ВЭС к ветроустановкам | Предшествующим установившимся режимом ВЭС | |
dPrefmin | р^ | Минимальная (отрицательная) скорость нарастания сигнала praf от регулятора ВЭС к ветроустановкам | Проектом |
Prefmax | Рпсы | Максимальный сигнал pte( от регулятора ВЭС к ветро-установкам | Проектом |
Prefmin | Р^ | Минимальный сигнал р^ от регулятора ВЭС к ветроустановкам | Проектоти |
^ГЛРрпмх | — | Максимум в звене интегратора ПИ-регулятора | Проектом |
^IWPpmin | — | Минимум в звене интегратора ПИ-регулятора | Проектом |
56
ГОСТ Р 54418.27.1—2019
Приложение В (обязательное)
Каталог типовых звеньев
В.1 Звено задержки по времени
Обозначение звена задержки на шаг времени при интегрировании показано на рисунке В. 1.
X---► ^*--► у
Примечание — Параметр модели Гв является общим параметром моделей ВЭУ (см. 5.3.3).
Рисунок В.1 — Обозначение звена задержки на шаг времени при интегрировании
Выходной сигнал у определяется входным сигналом х с задержкой на шаг времени T*. согласно формуле yV^xU-7,). (В.1)
В.2 Звено ограничения скорости нарастания
Обозначение звена ограничения скорости нарастания показано на рисунке В.2.
Рисунок В.2 — Обозначение типового звена ограничения скорости нарастания
Реализация звена ограничения скорости нарастания показана на рисунке В.З.
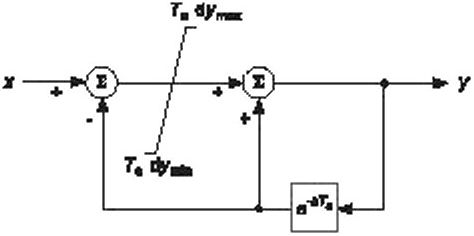
Рисунок В.З — Структурная схема реализации ограничителя скорости нарастания
8.3 Фильтр первого порядка с ограничениями скорости нарастания и сигналом фиксации состояния
Обозначение фильтра первого порядка с абсолютными пределами, ограничениями скорости нарастания и сигналом фиксации состояния показано на рисунке В.4.
Реализация такого фильтра показана на рисунке В.5. Абсолютные границы применяются к значению состояния и выходному сигналу звена. Ограничения скорости нарастания применяются к скорости изменения состояния и выходному сигналу звена. Состояние остается неизменным, пока активен сигнал фиксации состояния.
Если требуется обойти фильтр, полагая Г = 0. тогда реализация фиксации и ограничений должна быть выполнена так. как показано на рисунке В.6.
57
ГОСТ Р 54418.27.1—2019
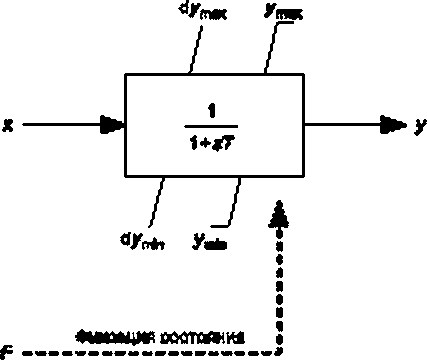
Рисунок В.4 — Обозначение фильтра первого порядка с ограничениями скорости нарастания и сигналок, фиксации состояния
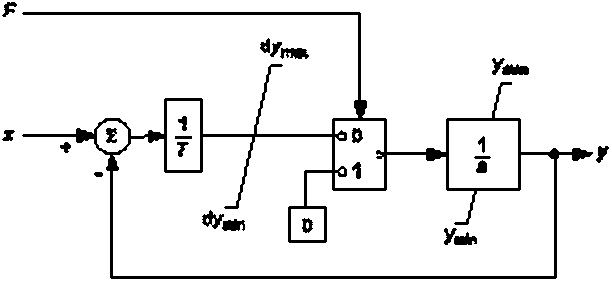
Рисунок В.5 — Структурная схема реализации фильтра первого порядка с ограничениями скорости нарастания и сигналом фиксации состояния
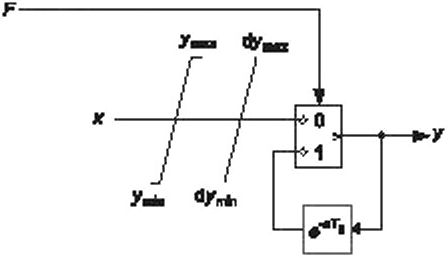
Рисунок В.6 — Структурная схема реализации фиксации состояния без применения фильтра (7 = 0)
В.4 Справочная таблица
Обозначение звена справочной таблицы показано на рисунке В.7.
х---► >Ю --►/
Рисунок В.7 — Обозначение типового звена справочной таблицы
Таблица задает множество значений (х. у) в заданных точках. Функционально справочная таблица определяет интервальные линейные соотношения между заданными точками, т. е. значения у рассчитываются линейной интерполяцией. Для точек по х вне заданного диапазона по х используется ближайшее значение х. т. е. применяется расширение, а не экстраполяция.
58
В.5 Звенья сравнения
Обозначения звеньев сравнения показаны на рисунке В.8.
■JF^XJ bJF^laJ
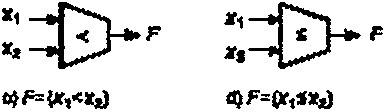
ГОСТ Р 54418.27.1—2019
Примечание — В операторах <. S, > или г верхний сигнал всегда представляет первый аргумент, а нижний — второй.
Рисунок В.8 — Обозначения типовых звеньев сравнения
8.6 Таймер
Обозначение таймера показано на рисунке В.9.
^--* твйир --^^
Рисунок В.9 — Обозначение звена таймера
Графики, описывающие функционирование таймера, приведены на рисунке В. 10. Выходной сигнал времени ^live сбрасывается в 0 всякий раз. когда входной сигнал Ftesel принимает значение 1 (ИСТИНА), и обновляется всякий раз. когда входной сигнал FJ(,x, имеет значение 0 (ЛОЖЬ).
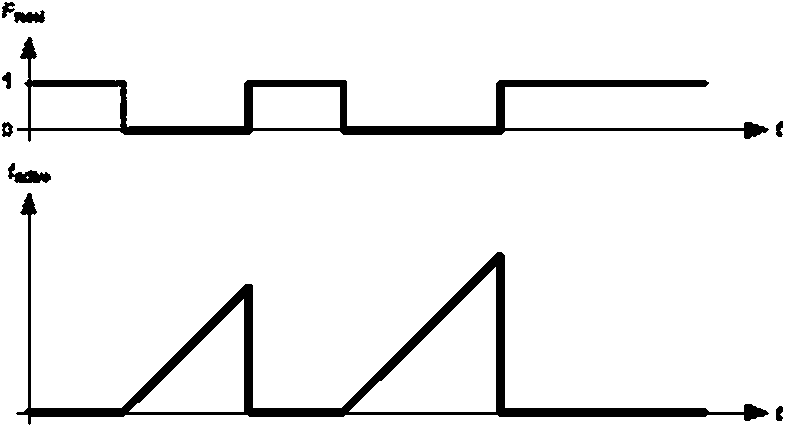
Рисунок В. 10 — Функционирование таймера
Таймер рассчитывает время по формуле
^ = ^^ <В2)
где ^^ — это последнее время, когда входной сигнал FwSet принял значение 1.
8.7 Интегратор с ограничениями
Обозначение интегратора с ограничением показано на рисунке В.11. Интегратор прекращает возрастание выходного сигнала при подаче сигнала F|nax и снижение выходного сигнала — при подаче сигнала F^.
59
ГОСТ Р 54418.27.1—2019
OqMWMOBpty
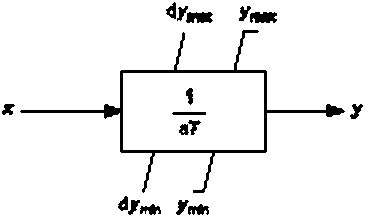
ОПМ№ЧМЯ»С*М*У
Рисунок В. 11 — Обозначение интегратора с ограничениями
Реализация интегратора с ограничениями показана на рисунке В. 12.
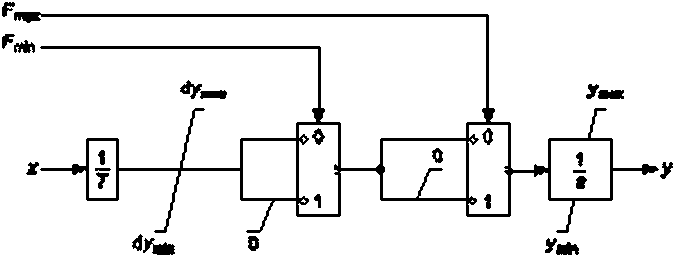
Рисунок В.12 — Структурная схема реализации интегратора с ограничениями
В.8 Интегратор со сбросом
Обозначение интегратора со сбросом показано на рисунке В. 13. Состояние интегратора возвращается к начальному со значением уге5с< при подаче сигнала F = 1.
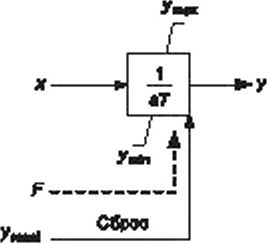
Рисунок В. 13 — Обозначение интегратора со сбросом
В.9 Фильтр первого порядка с ограничениями
Обозначение фильтра первого порядка с ограничениями показано на рисунке 8.14.
Рисунок В. 14 — Обозначение фильтра первого порядка с ограничениями
60
ГОСТ Р 54418.27.1—2019
Реализация фильтра первого передка с ограничениями показана на рисунке В. 15.
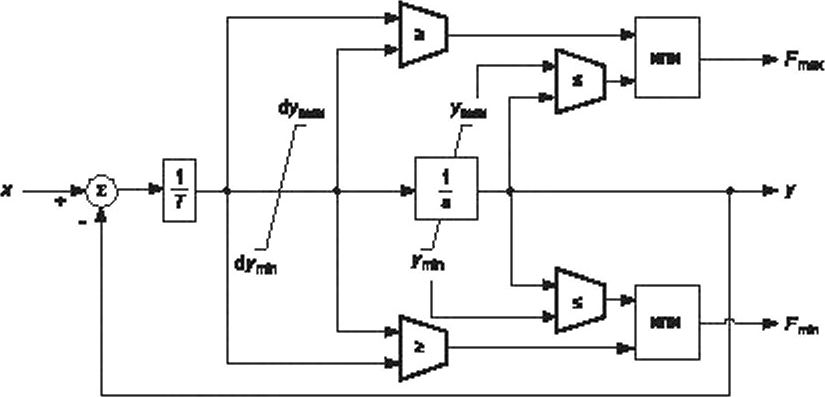
Рисунок В. 15 — Структурная схема реализации фильтра первого гюрядка с ограничениями
8.10 Звено индикации задержки
Индикация задержки обеспечивает продление сигнала аварии PQ. который добавляет значение наличия аварии 2 к входному сигналу аварии Ft со значением отсутствия аварии 0 и со значением наличия аварии 1. Время задержки 7d определяет, насколько долго сигнал F^ будет иметь значение 2.
Обозначение звена индикации задержки показано на рисунке 8.16.
Л«иа|м «№“
Рисунок 8.16 — Обозначение звена индикации задержки
Индикация задержки может быть реализована так. как показано на рисунке В.17.
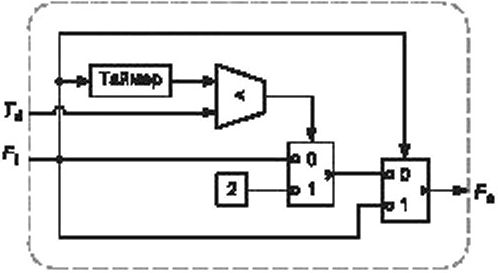
Рисунок В. 17 — Структурная схема реализации индикации задержки
8.11 Звено индикации фронта
Индикация фронта входной переменной осуществляет выдачу выходного сигнала, который указывает на возрастание входной переменной по сравнению с ее значением при предыдущем опросе.
Обозначение звена индикации фронта показано на рисунке В.18.
Рисунок В. 18 — Обозначение звена индикации фронта
61
ГОСТ Р 54418.27.1—2019
Индикация фронта может быть реализована так. как показано на рисунке В. 19.
Рисунок В.19 — Структурная схема реализации индикации фронга
62
ГОСТ Р 54418.27.1—2019
Приложение С (справочное)
Двухпараметрическая аэродинамическая модель
С.1 Математическое описание модели
Аэродинамическая мощность ВЭУ Ржп обычно рассчитывается по выражению
^о = р^зм^Ч (Л. О). (С.1)
где р — плотность воздуха;
^ВЭУЯ — радиус ветроколеса/ротора;
V — скорость ветра;
Ср (Л. 0) — коэффициент мощности, который зависит от угла установки лопастей 0 и быстроходности ветроколеса/ротора Л, определяемой по выражению
л=^эу^вэуя. (С2)
где &ВЭУЯ — угловая скорость вращения ветроколеса/ротора.
Аэродинамическая мощность в относительных единицах рэвго (v. 0. Wr) является функцией скорости ветра в относительных единицах v. угла установки лопастей 0 и угловой скорости вращения ветроколеса/ротора в относительных единицах oR. В установившемся режиме, соответствующем скорости ветра v0. доступная аэродинамическая мощность Pavaj(v0) при угле установки лопастей 0а и угловой скорости вращения ветроколеса/ротора ш^ задается выражением
Янан^И} .1= Янко 1Уо'®о>шо )■ (С.3)
В предположении постоянной скорости ветра и0 ряд Тейлора задает линейное представление характеристик аэродинамической мощности в окрестности рабочего значения доступной аэродинамической мощности (v0.0О. го^)
РЖъ = Pavail+ %<0 " °0>+ ^ЛЭУИ ’ ‘‘V <С ^
Частные производные dpH и dpm определяются по выражениям:
''Рье-с |
Шоа/Я““о
С.2 Аппроксимация параметров модели
Представленная выражением (С.4) аэродинамическая модель должна использоваться с 0 и (Or в качестве входных величин и набором зависящих от варианта параметров pa<ai|. 0О. Mq. dpH и dpM. В этом разделе приведен ряд аппроксимаций, которые изготовитель ВЭУ гложет использовать для определения параметров аэродинамической модели в конкретных вариантах.
На рисунке С.1 приведена типовая номограмма рабочего режима ВЭУ в зависимости от угла установки лопастей и скорости ветра. На рисунке С.2 представлена зависимость частной производной мощности по скорости вращения ветроколеса/ротора ^ржго >'дюя от угла установки лопастей и скорости ветра.
63
ГОСТ Р 54418.27.1—2019
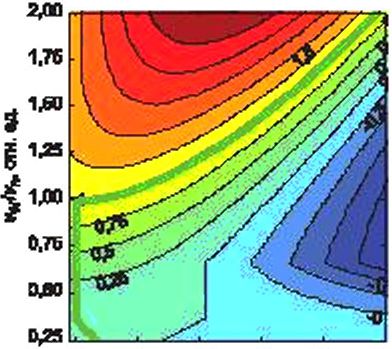
О $ 10 И « 25
e.rjweo
Рисунок С.1 — Зависимость аэродинамической мощности от угла установки лопастей 0 и скорости ветра v
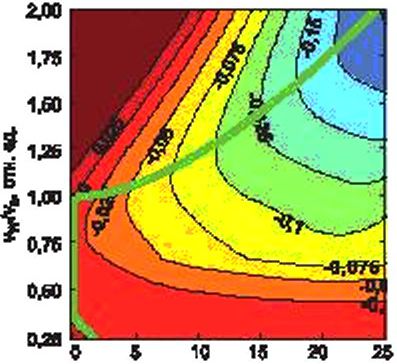
®.T*V>
Рисунок С.2 — Зависимость частной производной мощности по угловой скорости вращения ветроколесафотора ^aero ^R ог Угпа установки лопастей 0 и скорости ветра к
Как показано на рисунке С.3, частную производную мощности по углу установки лопастей вдоль рабочей траектории на номограмме можно описать очень простым способом как линейную функцию двух параметров, представляющих наклон и смещение. Такое представление так же справедливо в случае работы ВЭУ при неполной мощности.
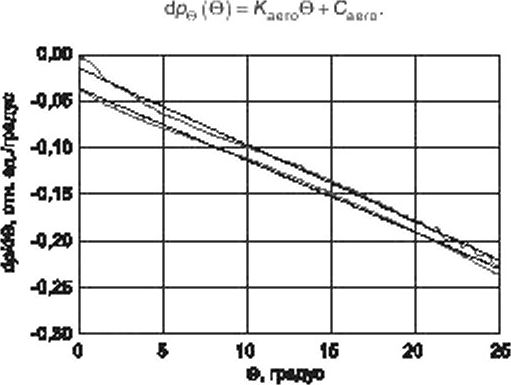
--dflWettO.TJ;--«»№
Рисунок С.З — Зависимость частной производной мощности по углу установки лопастей от угла установки лопастей 0
64
ГОСТ Р 54418.27.1—2019
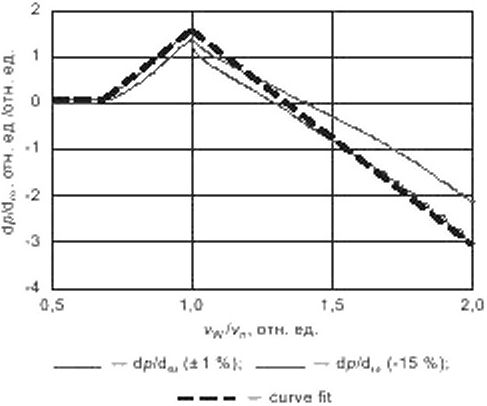
Рисунок С.4 — Зависимость частной производной мощности по изменению скорости вращения ветроколеса|'ротора от скорости ветра при 1 (сплошная линия) и 0.5 (пунктирная линия) в относительных единицах активной мощности
На рисунке С.4 показана частная производная мощности по изменению скорости вращения ветроколесафо-тора вдоль рабочей траектории номограммы для работы при номинальной мощности и 0.5 от номинальной мощности. Функциональная зависимость для номинальной мощности может быть аппроксимирована с помощью четырех параметров, приведенных в таблице С.1.
Таблица С.1 — Точки, характеризующие соотношение между скоростью ветра и и частной производной dpm
Входное значение (у) | 0 | ^1 | 1 | 2 |
Выходное значение (dpM) | d₽.ai | dP/i | dpv2 |
Воздействие изменения угла установки лопастей на dp^ при снижении мощности (работа при части номинальной мощности) может быть аппроксимировано формулой
(С-7)
Окончательное определение dpM задается формулой
dP,. (*«) =
2
2 1-<
для и s у1И
•(dp^-dp..,) дляу^суй!
(С.8)
2
-”К^)
ДЛЯ V > 1
Поскольку dp(il является функцией скорости ветра, требуется задать значение начальной скорости ветра. Зависимость между скоростью ветра v и соответствующей доступной аэродинамической мощностью определяется кривой Ppjv). Кривая мощности определяется при помощи единственного параметра, который задает скорость ветра Ид,роз при значении активной мощности 0.3 (см. рисунок С.5). Ниже этого значения предполагается кубическая зависимость между скоростью ветра и мощностью, как показано в формуле (С.9). При более высоких скоростях ветра вплоть до номинальной. Идооз S и 5 1. используется линейная аппроксимация. В итоге доступная аэродинамическая мощность при скорости ветра определяется по следующей формуле:
Mv)=
0.3 з -------v
VWPO3
1ч °-7
1-VWPO3
для 0< v 5 vWPO3
(У-1)ДЛЯУ„раз < У < 1
(С-9)
ДЛЯ У>1
65
ГОСТ Р 54418.27.1—2019
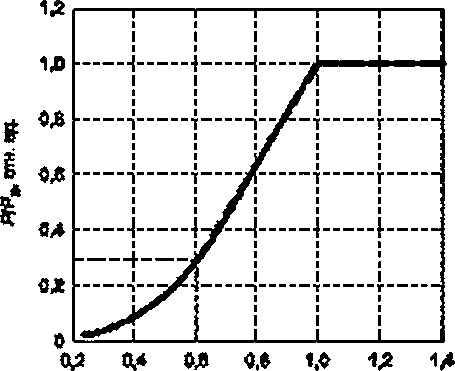
м^Л^сян-ад.
■^^— — мощналк
— — — —«лпрожжинрумджя Ир«*Я
Рисунок С.5 — Аппроксимация зависимости аэродинамической мощности от скорости ветра
Отношение между скоростью ветра и углом установки лопастей определяется аппроксимацией
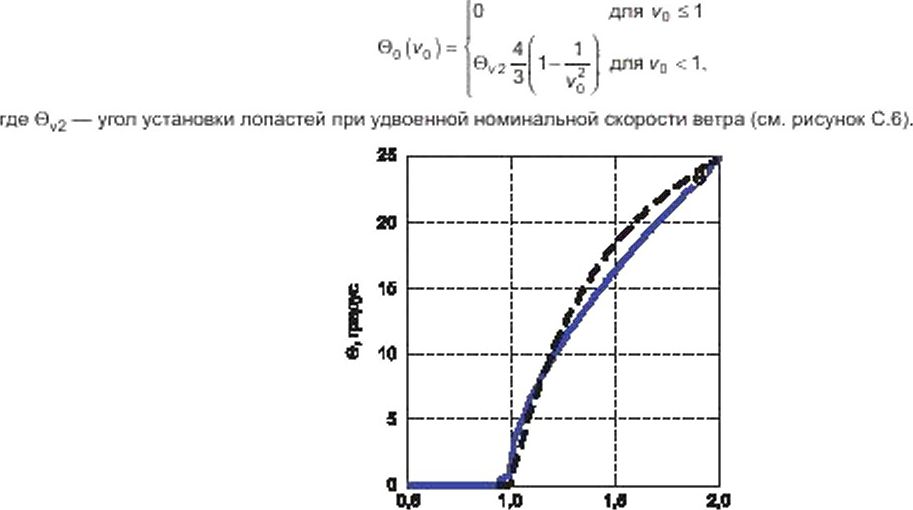
>1*4. «НН. «А.
^^^—•—улит галету
■■■■■■ —■ггфсжм1Лф)в«цм кривая
Рисунок С.6 — Аппроксимация угла установки лопастей в зависимости от скорости ветра
Объединяя указанные выше аппроксимации, изготовитель может описать аэродинамические характеристики конкретного варианта одного из типов ВЭУ при помощи параметров, приведенных в таблице С.2.
Т а б л и ц а С.2 — Параметры для описания аэродинамических характеристик ВЭУ конкретного типа
Обозначение | Базисная величина | Описание | Уравнение |
vWP03 | Скорость ветра при 0.3 номинальной мощности | (С-9) | |
^аего | Рнз^рад/^ | Смещение в линейном представлении cpQ | (С-6) |
66
Окончание таблицы С. 2
ГОСТ Р 54418.27.1—2019
Обозначение | Базисная величина | Описание | Уравнение |
“аен, | Наклон в линейном представлении др# | (С.6) | |
Скорость ветра, при которой достигается номинальная скорость ветроколеса/ротора (в предположении идеального управления) | (С.8) | ||
dP«1 | РкоА,е | dpM при угловой скорости ветроколеса/ротора ниже номинальной | (С.8) |
dPv2 | ^HO^twe | dpm при удвоенной номинальной угловой скорости ветро-колеса'ротсра | (С.8) |
С.З Варианты применения
С.3.1 Общие положения
При изучении устойчивости энергосистемы предполагается, что пользователь будет проверять ограниченное количество вариантов, характеризующихся скорее доступной аэродинамической мощностью, чем скоростью ветра. С другой стороны, при проверке соответствия модели в каждом конкретном варианте для получения достаточной точности в зависимости от испытываемого варианта необходимо провести оценку скорости ветра и использовать ее при этой проверке.
С.3.2 Варианты проверки устойчивости
Варианты проверки устойчивости характеризуются доступной аэродинамической мощностью p^i- В таких вариантах проводится моделирование с пониженной мощностью, при котором на ВЭУ поступает сигнал опорной мощности p^f s pavaj от регулятора ВЭС. участвующей в регулировании частоты.
Этого обычно достаточно для единственного варианта с максимальной доступной аэродинамической мощностью при рамН = 1. Однако также возможно дополнить этот вариант другими вариантами, когда доступная аэродинамическая мощность pavaj( < 1. При изучении вариантов устойчивости в зависимости от доступной аэродинамической мощности раИ| изготовитель может рассчитать параметры, зависящие от варианта модели ВЭУ. следующим образом:
- если рмй = 1. выбирают скорость ветра v0 > 1. Если Рач.аИ < 1. ^ может быть рассчитана по кривой мощности в (С.9), полагая ppc(v0) = р^;
- рассчитывают фй = dpo(v0) по формуле (С.6):
- рассчитывают dpw = dpM(v0) по формуле (С.8):
- рассчитывают о^ по доступной аэродинамической мощности pavajl. используя справочную таблицу зависимости угловой скорости вращения ветроколеса'роторз от мощности го = ffp) (см. 5.6.5.4);
- определяют 90 = О^^) по формуле (С. 10).
С.3.3 Варианты проверки модели
Определение параметров модели для вариантов проверки модели является более сложным, поскольку обычно вследствие изменчивости скорости ветра испытываемая ВЭУ не находится в начальном стационарном состоянии. В этом случае более точной является оценка скорости ветра по мощности, или. если ВЭУ работает в режиме управления ограничением мощности вследствие либо Pav;sl = 1. либо р^ S Да7а1. тогда скорость ветра оценивается по углу установки.
С.4 Начальное состояние модели
Корректное использование модели возможно только в условиях пониженной мощности, когда начальная мощность piniSPawlil.
Начальные значения О и гоцэуд определяют следующим образом:
- рассчитывают начальное значение со^ по начальной мощности pinil. используя справочную таблицу зависимости угловой скорости вращения ветроколеса/ротора от мощности и = /(р) (см. 5.6.54):
- определяют начальное значение 6||й по формуле
Q п . А'Г " Avlnd — ^Р» I Чли — ^01 и ч
®init = «о 4-------------Z---------------• (С. 11)
67
ГОСТ Р 54418.27.1—2019
Приложение О (обязательное)
Пределы возможной точности модели
D.1 Общие положения
Целью данного приложения является описание пределов возможной точности моделирования для определенных в настоящем стандарте общих моделей. Поскольку оценка точности модели основана на сравнении между смоделированными и измеренными значениями, в настоящее приложение включено описание как неизбежных ошибок модели, гак и ошибок измерений.
D.2 Неизбежные ошибки моделирования
Точность определенных в настоящем стандарте общих имитационных моделей ограничена вследствие упрощений. которые были сделаны для получения моделей, воспроизводящих переходные характеристики устойчивости энергосистемы, а также с целью представления широкого диапазона различных технологий и конфигураций ВЭУ. В этом отношении можно ожидать, что достижимая в этих моделях точность может меняться в зависимости от представления различных технологий, конфигураций и конкретных систем управления ВЭУ. Поэтому различие в точности параметров двух различных ВЭУ. представленных одним и тем же типом общей модели, может объясняться тем. что модель более приспособлена и легче настраивается на конкретную конфигурацию одной из ВЭУ. и эго не обязательно означает, что модель с меньшей точностью была не достаточно правильно настроена.
В том случае, когда измерения выполняются на стороне высокого напряжения трансформатора, в модель ВЭУ должна быть включена модель трансформатора. При этом в результаты измерений может быть внесено влияние электромагнитных эффектов (таких, как нелинейность), обусловленных электромагнитными характеристиками трансформатора. При анализе устойчивости эти эффекты не учитываются (см. требования к модели в 6.2). Такие эффекты поэтому не воспроизводятся предложенными в настоящем стандарте моделями, и в оценку точности этих моделей должна быть включена неопределенность, вносимая трансформатором ВЭУ.
D.3 Ошибки измерений
В процессе проверки модели всегда присутствуют требования по измерению данных либо в натурных условиях эксплуатации ВЭУ. либо при заводских испытаниях оборудования. Затем эти данные используются для сравнения с результатами моделирования с той моделью, которая проходит проверку. Поэтому важно понимать ограничения и ошибки, вносимые в процессе измерений. В широком смысле эта ситуация может быть разбита на следующие категории:
- большинство измерительных трансформаторов напряжения и тока имеют относительную точность не менее 0.01. В дополнение к этому в регистрируемые данные могут вноситься ошибки преобразований из аналоговой формы в цифровую (так же. как ошибки измерительных трансформаторов напряжения и тока). При измерении активной и реактивной мощности, а также напряжения это может привести к накоплению относительной ошибки в диапазоне 0.02—0.03;
- вследствие ограниченности полосы пропускания датчиков и измерительного оборудования дополнительные ошибки могут быть внесены при измерении быстрых переходных процессов (в присутствии высокочастотных компонентов);
- применяемое на ВЭУ контрольно-измерительное оборудование обычно имеет меньшую точность, чем поверенное лабораторное измерительное оборудование, это также может приводить к дополнительному увеличению относительной ошибки на 0.01;
- разрабатываемое оборудование, включая все электрическое (и механическое) оборудование, имеет соответствующую номинальную проектную точность. Параметры генерирующего оборудования легко могут иметь относительную точность порядка 0.05:
- существуют такие аспекты характеристик оборудования, как магнитное насыщение и гистерезис, которые невозможно воспроизвести в модели и влияние которых на результаты измерений также невозможно исключить;
- еще одной проблемой является необходимость преобразования мгновенных значений в трехфазной системе к среднеквадратичным величинам, используемым для сравнения в моделях устойчивости. В процессе преобразования вносится дополнительная ошибка, кроме того, среднеквадратичные значения могут включать составляющую основной частоты при несимметричных условиях, которую необходимо отфильтровать.
Для расчетной активной и реактивной мощности и измеренных напряжений и токов совместный результат всех этих возможных ошибок гложет составлять от 0,03 до 0.05. В некоторых случаях вследствие невозможности учесть в модели определенные физические явления эти ошибки могут быть еще выше. Учитывая эти обстоятельства. нельзя требовать необоснованной точности соответствия результатов моделирования и измерений.
68
ГОСТ Р 54418.27.1—2019
Приложение Е (справочное)
Пример составления отчета о проверке модели
Е.1 Общие положения
В данном приложении даны предложения по оформлению результатов проверки модели ВЭУ согласно разделу 6.
В дополнение к протоколу испытаний измеренные и смоделированные значения должны при необходимости быть представлены в виде файлов временных последовательностей данных в стандартном формате, например COMTRADE (COMmon format for TRAnsient Data Exchange — общий формат обмена данными о переходных процессах) или UTF (Unicode Transformation Format — Юникод).
Е.2 Данные об имитационной модели и способе ее проверки
В таблице Е.1 указаны необходимые данные о модели и способе ее проверки.
Таблица Е.1 — Данные о модели и способе ее проверки
Данные | Описание |
Тип модели | Описание наименования модели в настоящем стандарте или иное название |
Используемое множество па-раметров | Параметры, прилагаемые к протоколу |
Описание поверки модели | Примененный метод проверки — метод воспроизведения или метод полной имитации энергосистемы |
Если для проверки модели использован метод полной имитации энергосистемы, должны быть приведены дополнительные данные, указанные в таблице Е.2.
Таблица Е.2 — Дополнительные данные о модели и способе ее проверки
Данные | Описание |
Данные об испытательном оборудовании | Тип оборудования (например, имитатор короткого замыкания или преобразователь. регистратор аварии) Ключевые данные об оборудовании, например значениях последовательных сопротивлений или сопротивлений имитатора короткого замыкания |
Данные о сети питания, к которой подключаются ВЭУ и испытательное оборудование | Данные об уровне напряжения и сопротивлении короткого замыкания, включая отношение реактивного сопротивления к активному |
Е.З Представление результатов испытаний
Е.3.1 Проверка реакции модели на провалы напряжения
Для каждого варианта испытаний должны быть представлены в графическом виде:
- временные ряды измеренных и смоделированных значений напряжения прямой последовательности:
- временные ряды измеренных и смоделированных значений активного тока прямой последовательности;
- временные ряды измеренных и смоделированных значений реактивного тока прямой последовательности;
- временные ряды измеренных и смоделированных значений рассчитанной абсолютной ошибки активного и реактивного тока.
По оси X откладываются полные временные ряды измеренных и смоделированных значений в промежутке времени от момента на одну секунду ранее возникновения провала напряжения до момента не менее чем пять секунд после его окончания.
Ось Y должна быть линейной и включать полные данные об измеренных и смоделированных относительных значениях.
Результаты оценки ошибок реакции модели на провалы напряжения в относительных единицах для всех вариантов испытаний сводятся в таблицу Е.З.
69
ГОСТ Р 54418.27.1—2019
Таблица Е.З — Оценка ошибок реакции модели на провалы напряжения
Вариант испытаний | Период | Активная мощность | Реактивная мощность | Активный ток | Реактивный ток | ||||||||
МО | со | САО | МО | СО | САО | МО | СО | САО | МО | со | САО | ||
Данные, зависящие от варианта испытания, такие как напряжение до аварии, оцен- | до аварии | ||||||||||||
ка сопротивления системы питания, характеристики испытательного оборудования, например сопротивление имитатора короткого замыкания | авария | ||||||||||||
после аварии | |||||||||||||
Примечание — МО — максимальная ошибка. СО — средняя ошибка. САО — средняя абсолютная ошибка.
Е.3.2 Проверка реакции модели на изменение опорных значений
Для каждого варианта испытаний должны быть представлены в графическом виде:
- временные ряды установленных значений, а также измеренных и смоделированных знамений активной мощности прямой последовательности;
- временные ряды установленных значений, а также измеренных и смоделированных значений реактивной мощности прямой последовательности;
- временные ряды измеренных и смоделированных значений активного тока прямой последовательности;
- временные ряды измеренных и смоделированных значений реактивного тока прямой последовательности;
- временные ряды измеренных и смоделированных значений рассчитанной абсолютной ошибки.
По оси X откладываются полные временные ряды измеренных и смоделированных значений в интервале времени от момента на одну секунду ранее начала действий по регулированию активной и реактивной мощности до момента не менее чем на одну секунду позднее времени регулирования. Ось Y должна быть линейной и включать полные данные об измеренных и смоделированных относительных значениях.
Результаты проверка реакции модели на изменение опорных значений в относительных единицах для всех вариантов испытаний сводятся в таблицу Е.4.
Таблица Е.4 — Сводка проверки реакции модели на изменение опорных значений
Вариант испытаний | Время нарастания | Время отклика | Время регулирования | |||
Измеренное | По результатам моделирования | Измеренное | По результатам моделирования | Измеренное | По результатам моделирования | |
Е.3.3 Проверка модели защиты электрической сети
Результаты всех вариантов испытаний защиты электрической сети, в относительных единицах, сводятся в таблицу Е.5.
Т а б л и ц а Е.5 — Сводка проверки защиты электрической сети
Вариант испытаний | Уровень защиты | Время отключения | ||||
Заданный | Измеренный | По результатам моделирования3? | Заданное | Измеренное | По результатам моделирования3' | |
Повышенное напряжение | ||||||
Пониженное напряжение | ||||||
Повышенная частота | ||||||
Пониженная частота | ||||||
31 Уровень защиты при моделировании не выявляется, а только проверяется. В этой колонке следует указывать заданный уровень защиты для данного варианта испытаний.
70
ГОСТ Р 54418.27.1—2019
Приложение F (обязательное)
Цифровой фильтр низкой частоты 2-го порядка с критическим затуханием
Цифровой фильтр низкой частоты 2-го порядка с критическим затуханием с частотой среза fcut имеет передаточную функцию
——• <Fn
s + 2шси1а + й>си)
где <0^ = 2^. (F.2)
В реализации этого фильтра используется входная дискретная временная последовательность х, = х(/Т) и шагом по времени Г. Применяя стандартное билинейное преобразование аналоговой формы в дискретную, получаем выходную дискретную временную последовательность у, в следующем виде:
2 2
Ут = LA^rS6*^-*!-
*-о к-»
Коэффициенты уравнения при этом имеют вид:
А =24,;
(’4J2+47beM| + 4
^ J^^-^ut^ i^cui^4^: -4
Чтобы избавиться от начального переходного процесса в начальном состоянии фильтра, используется первое значение входного сигнала х0 в виде:
У.2 = У 1 = ^2=* 1 = х3. (F.5)
(F.3)
(F.4)
71
ГОСТ Р 54418.27.1—2019
Приложение G (справочное)
Общее сопряжение программного обеспечения для применения с различными программными комплексами моделирования
G.1 Описание метода
Описание всех применяемых моделей в обобщенной форме невозможно по следующим причинам:
- в модели присутствует функциональность, отсутствующая в общей глодали:
- в модели присутствует конфиденциальная информация, не подлежащая разглашению;
- предполагается, что модель является тонной копией реальной реализации управления и содержит оригинальный исходный код регулятора.
При применении таких моделей, возможно, потребуется:
- использовать модель в условиях иной программной среды;
- использовать модели различных изготовителей, предназначенные для различных программных сред.
Применение общего программного сопряжения позволяет использовать одну и ту же модель в объектном коде как в различных программных средах, так и в сочетании с моделями из других источников. В зависимости от программной среды такие характеристики, как последовательность вызова процедур, алгоритмы интегрирования, передача параметров, могут использоваться по-разному. Концепция общего сопряжения гарантирует, что модель будет функционировать и давать корректные результаты в указанных условиях. Некоторыми главными требованиями являются:
- поддержка как внутренних (в модели), так и внешних расчетных механизмов (состояний и их производных, получаемых из модельной среды);
- поддержка нескольких экземпляров модели;
- необязательная поддержка моделирования с переменным шагом;
- необязательная поддержка итерационного расчета параметров потокораспределвния мощности;
- необязательная поддержка функциональности, связанной с графическим представлением для пользователя (ввод, вывод и отображение наименований параметров);
- необязательная поддержка изменений параметров.
Общее программное сопряжение обеспечивает полную функциональность при построении моделей в различных модельных средах. Описание сопряжения выполнено на языке программирования Си. поскольку он является наиболее распространенным языком программирования, однако в нем нет каких-либо ограничений для построения моделей на других языках программирования (например, на языке Фортран и т. п.).
Хорошим способом построения моделей для различных программных сред является использование динамических библиотек объектных модулей (DLL), которые обеспечивают защиту авторских прав и воспроизводимость результатов. Важной чертой применения динамических библиотек при решении различных задач моделирования является гибкость сопряжения, которая предоставляет возможность выполнить требования различных моделирующих систем. Сопряжение расширенной среды моделирования (РСМ-сопряжение) удовлетворяет этим требованиям. В данном приложении приведены его структуры данных и функции.
G.2 Описание программного сопряжения
G.2.1 Описание структур данных
G.2.1.1 Общие положения
Для передачи данных через PCM-сопряжение используются следующие структуры данных (на языке программирования Си).
G.2.1.2 StaticExtSimEnvCapi
Описание: Содержит общие данные о модели.
72
ГОСТ Р 54418.27.1—2019
typedef struct
{ const uml8_T
const charT * const const charr • const const сПэг_Г • const const char_T * const const char_T • const const char_T • const const char_r * const const char_T * const const char_T • const const cfiar_T • const const char_T • const const char_T • const const char_T * const
const rea!64_T
const lni32_T
const Static ESElnputSwnal ’ const const int32_T
const StaticESEOuipuiS^nai ‘ const
const int32_T
const StaticESEParameter • const
const int32_T
const inf32_T
const uinB2_T
const char_T const uima т
APlReleaseP);
Mo coin am e
Modeiversion;
ModelDescription: VersronConlrolInfo, General information;
MoaelCreated: McaelCreator.
ModelLaaiModifiedDate. ModeiLasiModifiodBy, ModelModViedCommeni ModelModrhedHlstory; CodeGeneratedOn;
InciudedSolver;
FixedStepBaseSampfeTime^ Base sample time
>1 Release number o< the API used during
/I code generation
H Model name
ii Model version
H Model description
W Version control information
II General Into - - here some RT'Ai into
и Model created on
H Model created Dy
!i Model last modified on
ll Model last modified by
ll Model modified comment
/I Model modified history
H Code generated on
II Solver name lean Be empty)
const ulnl8_T
ESEE «tension
jStaficExtSimEnvCapi.
Num inputports: | ii Number or inputs |
inputPortsInto: | >1 Pointer to input signal description array |
NumOutputPorts; | W Number of outputs |
Oulput₽ort$lnfo. | ii Pointer to output signal description и array |
Num Parameters- | ll Number of parameters |
Parameterslnfo; | ll Pointer to parameter desenpnon array |
NumConlStates. | 4 Number of continuous states |
SizeofMiscStates. | H Size of work variables 1 misc states |
ModeiChecksumR], | fl Simuiink model checksum |
•LastErrorMessage. | II Error string pointer |
EMT_RMS_Mode | II Mode- EMT = 1 RMS = 2 ll EMT 4 RMS = 3. II otherwse: 0 |
LoadfiowFiag. | fl Model contains a loadflow function rr 0 = no. i = yes |
Extension: | н Provided tor extensions |
G.2.1.3 InstanceExtSimenvCapi
Описание: Содержит данные, относящиеся к выполнению имитационного прогона.
typedef struct
{ rea!64_T
real64_T rea№4_T reai64_T reat€4_T uint8_T const char_T const char_T
Uint8_T
ESEExtension
HnstanceExtSimEnvcapi;
‘Externalinputs
•Extern a (Outputs;
‘Parameters,
•continuousstates:
•StateDenvatives:
•Mis estates:
•taste rrorMess age;
‘LastGe пега iMessage. verboseLevei, Extension:
I/ Input signals all elements in one long vector
II Output signals, all elements in one long vector
II Parameters as vector
ll We assume a states vector
tf We assume a states derivatives vector
ii Work vanabies i states with unknown content
H Error string pointer
fl General message
fl Decides how much me code ’should talk"
ii Provided tor extensions
G.2.1.4 StaticESEInputSignal
Описание: Содержит данные о входном сигнале.
typedef struct
( const char_T * const Name.
const cnar_T * const BiockPatn:
const ini32_T Width,
jstaticESE inputsignai;
If Input signal name
a Path to block in simuiink model fl Signal width
G.2.1.5 StaticESEoutputSignal
Описание: Содержит данные о выходном сигнале.
73
ГОСТ Р 54418.27.1—2019
typedef struct
( const char_T ’ const const char_T * const const int32_T
JStaticESEOutputSignal;
Name:
BlockPalh.
Width;
Il Output signal name
U Path to block in Simulink model
U Signal width
G.2.1.6 StaticESEParameter
Описание: Содержит данные о параметрах модели
typeset struct
( const char_T * const const cnar_T * const const cnar_T ’ const const rea!64_T const reai64_T const real64_T
JSiailcESE Parameter.
Name;
Description.
Unit;
Defaultvalue;
Minvalue;
MaxValue:
1/ Parameter name
I/ Description
I/ Unit
II Default value и Minimum value I/ Maximum value
G.2.1.7 StaticESEExtension
Описание: Дополнительная память для будущих расширений.
lypedef union
JESEExtension
1П18_Т | Userint8_8(8]; |
uint8_T | UserUint9_8f8J; |
int16_T | Userlntt6_4[4], |
Uint15_T | useruintie 4[4|; |
in!32 Т | Userln:32 2[2]; |
uint32_T | UserUint32_2[2}; |
cbar_T | UserChar 8(8]; |
real32_T | UserReal32_2|2]; |
real64_T | UserReai64; |
void | ‘UserVoidPtr; |
G.2.2 Функции обмена в РСМ-сопряжении
Следующие функции определяют последовательность выполнения моделирования. Типичная последовательность показана на рисунке G.1.
74
ГОСТ Р 54418.27.1—2019
Begin:
8«MMel_e«tInto()
И = Hod«l_Xn»t«nc»<S»lv,r, Т») Mod«l_CheckPtcametara(М)
I *Lo^dfl<nrlt«ration :
Mod<l_Loadtlow(M)
1— En</Loadrlovlcer9tlc^
Mod»l_Initl»liie<X)
Get static model information needed to configure the environment
Create instance, use interna (i) or eternal (0) sober, set sample time
Check parameters
(Humber of iterations depends on load flew sober)
Cakiiate outputs of load flow function
Reset and mtiaiize the states
—*»imilationL<*op:
Model_Ou«puts (M, 1) Xodel_Vpdete(K)
—*Гл tagratlonlMp • Mod*l_P«civ*tiv»«(M) r—*re*re id о» .■
Mod«l_Output«(M, 0) H9d»lJ»riv«tiv»»(K|
'—ZnUtczation
'~~En<Untagrati.onZoop
— EndSiaulatlonLoop
Xodel_Terainate(M)
End
CakUate system outputs on major time step (1)
Update ciscrcte states (and continuous states if internal sober used)
(Only needed if external sober is used)
CakUate continuous stale derivatives
(Nurnb&f cf Xerabons aspends on ODE sotver)
Catenate system outputs on minor time step (0)
CakJate continuous state derivatives
Delete the instance
Рисунок G.1 — Последовательность моделирования при использовании РСМ-сопряжения
- const Static ExtSimEnvCapi’__cdecl Model_Getinfo():
Описание: Предоставляет общие данные о модели.
Возвращаемое значение: NULL — при ошибке, в противном случае — указатель на заполненную структуру StaticExtSimEnvCapi.
- instanceExtSimEnvCapi’__cdecl Model_lnstance(uint32_T UseSolverinDLL. rea!64_t Ta):
Описание: Создает экземпляр модели.
- UseSolverinDLL: 1 — внутренний расчетный блок. 2 — внешний расчетный блок.
Та: > 0: тактовое время опроса. -1: тактовое время опроса по умолчанию.
Возвращаемое значение: NULL — при ошибке, в противном случае — указатель на заполненную структуру Instance ExtSimEnvCapi.
- const charT’__cdecl Model_CheckParameters(instanceExtSimEnvCapi ‘plnstansCapi):
Описание: Проверяет, находятся ли параметры модели в допустимых пределах.
Возвращаемое значение: NULL — при ошибке, в противном случае — строка с описанием ошибки.
- const char_T’__cdecl Model_Loadflow(instanceExtSimEnvCapi‘plnstansCapi):
Описание: Выполняет итерацию имитационного цикла.
Возвращаемое значение: NULL — если нет ошибки, в противном случае — строка с описанием ошибки.
- const charT’__cdecl Model_lnitialize(instanceExtSimEnvCapi*plnstansCapi):
Описание: Выполняет переход модели в начальное состояние.
Возвращаемое значение: NULL — если нет ошибки, в противном случае — строка с описанием ошибки.
- const char_T*__cdecl Model_Outputs(lnstanceExtSimEnvCapi ‘plnstansCapi, unit32_T IsMajorTimeStep):
Описание: Выполняет шаг по времени и перерасчет выходных значений.
IsMajorTimeStep: 1 — основной шаг по времени. О — малый шаг по времени (между двумя интегрированиями).
Возвращаемое значение: NULL — если нет ошибки, в противном случае — строка с описанием ошибки.
- const char_P__cdecl Model_Update(lnstanceExtSimEnvCapi ‘plnstansCapi):
Описание: Обновляет переменные, характеризующие состояние.
Возвращаемое значение: NULL — если нет ошибки, в противном случае — строка с описанием ошибки.
- const char_T’__cdecl Model_Derivatives(lnstanceExtSimEnvCapi ‘plnstansCapi):
Описание: Рассчитывав! производные переменных, характеризующих состояние (требуется только при при-менении внешнего расчетного блока).
Возвращаемое значение: NULL — если нет ошибки, в противном случае — строка с описанием ошибки.
- const char_T‘__cdecl Model_Terminate(lnstanceExtSimEnvCapi ’plnstansCapi):
Описание: Удаляет экземпляр модели и освобождает выделенную память.
Возвращаемое значение: NULL — если нет ошибки, в противном случае — строка с описанием ошибки.
G.2.3 Входные значения. Выходные значения. Параметры
При использовании пакета Matlab должны быть выполнены следующие требования:
- значения с плавающей точкой;
- скалярные величины или векторы (не допускаются матрицы, структуры или шины);
- действительные значения (не допускаются комплексные величины).
Входные и выходные значения получают по результатам опроса (а не временного интервала).
75
ГОСТ Р 54418.27.1—2019
Приложение ДА (справочное)
Сведения о соответствии ссылочных национальных и межгосударственных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте
Т а б л и ц а ДА. 1
Обозначение ссылочного национального. ыежгосударсзвенного стандарта | Степень соответствия | Обозначение и наименование ссылочного международного стандарта |
ГОСТ 32144—2013 | NEO | EN 50160:2010 «Характеристики напряжения электричества, поставляемого общественными распределительными сетями» |
ГОСТ Р 54418.21—2011 (МЭК 61400-21:2008) | MOD | IEC 61400-21:2008 «Установки ветроэнергетические. Часть 21. Измерение и оценка характеристик качества электроэнергии ветровых турбин с сетевым подсоединением» |
ГОСТ Р 55589—2013 (МЭК 60050-415:1999) | MOD | IEC 60050-415:1999 «Международный электротехнический словарь. Глава 415. Ветрогенерагоры» |
Примечание — В настоящей таблице использованы следующие условные обозначения степени соответствия стандартов: - MOD — модифицированные стандарты; - NEO — неэквивалентный стандарт. | ||
76
ГОСТ Р 54418.27.1—2019
Приложение ДБ (справочное)
Сопоставление структуры настоящего стандарта со структурой примененного в нем международного стандарта
Указанное в таблице изменение структуры настоящего стандарта относительно структуры примененного международного стандарта обусловлено приведением в соответствие с требованиями, установленными в ГОСТ 1.5.
Таблица ДБ. 1
Структура настоящего стандарта | Структура международного стандарта МЭК 61400-27-12015 |
1 Область применения | 1 Область применения |
2 Нормативные ссылки | 2 Нормативные ссылки |
3 Термины и определения (3.1) | 3 Термины, определения, обозначения и сокращения |
3.1 Термины и определения | |
4 Обозначения (3.2. 3.2.1, 3.2.2. раздел 4. 4.1. 4.2) | 3.2 Сокращения и обозначения |
3.2.1 Сокращения | |
3.2.2 Обозначения (индексы) | |
4 Обозначения и единицы измерения | |
4.1 Общие положения | |
4.2 Обозначения (единицы измерения) | |
5 Построение общих имитационных моделей ВЭУ | 5 Определение моделей |
5.1 Типы ветроэнергетических установок | 5.1 Общие положения |
5.2 Требования к моделям | 5.2 Общие требования |
5.3 Взаимосвязь имитационной модели ВЭУ с имитационными моделями ВЭС и энергосистемы | 5.3 Взаимосвязи модели |
5.4 Параметры/переменные моделей и начальное состояние | 5.4 Параметры и начальное состояние |
5.4.1 Общие положения | 5.4.1 Общие положения |
5.4.2 Виды параметров моделей модулей ВЭУ | 5.4.2 Категории параметров |
5.4.3 Общие параметры моделей | 5.4.3 Общие параметры |
5.4.4 Начальное состояние | 5.4.4 Начальное состояние |
5.5 Структура общих моделей | 5.5 Модульная структура моделей |
5.5.1 Общая модульная структура | 5.5.1 Общая модульная структура |
5.5.2 Модели ВЭУ типа 1 | 5.5.2 Тип 1 |
5.5.2.1 Описание ВЭУ типа 1 | 5.5.2.1 Определение типа 1 |
5.5.2.2 Структура модели ВЭУ типа 1А | 5.5_2.2 Описание модели типа 1А |
5.5.2.3 Структура модели ВЭУ типа 1В | 5.5.2.3 Описание модели типа 1В |
5.5.3 Модель ВЭУ типа 2 | 5.5.3 Тип 2 |
5.5.3.1 Определение ВЭУ типа 2 | 5.5.3.1 Определение типа 2 |
5.5.3.2 Структура модели ВЭУ типа 2 | 5.5.3.2 Описание модели типа 2 |
5.5.4 Модель ВЭУ типа 3 | 5.5.4 Тип 3 |
5.5.4.1 Описание ВЭУ типа 3 | 5.5.4.1 Определение типа 3 |
5.5.4.2 Структура модели ВЭУ типов ЗА и ЗВ | 5.5.4.2 Описание модели типа 3 |
5.5.5 Модели ВЭУ типа 4 | 5.5.5 Тип 4 |
77
ГОСТ Р 54418.27.1—2019
Продолжение таблицы ДБ. 1
Структура настоящего стандарта | Структура международного стандарта МЭК 61400-27.1:2015 |
5.5.5.1 Описание ВЭУ типа 4 | 5.5.5.1 Определение типа 4 |
5.5.5.2 Структура модели ВЭУ типа 4А | 5.5.5.2 Описание модели типа 4А |
5.5.5.3 Структура модели ВЭУ типа 4 В | 5.5.5.3 Описание модели типа 4 В |
5.6 Каталог моделей модулей ВЭУ | 5.6 Каталог модулей |
5.6.1 Модели аэродинамического модуля | 5.6.1 Аэродинамические модели |
5.6.1.1 Модель с постоянным аэродинамическим моментом | 5.6.1.1 Модель постоянного аэродинамического момента |
5.6.1.2 Одномерная аэродинамическая модель | 5.6.1.2 Однопараметрическая аэродинамическая модель |
5.6 1.3 Двумерная аэродинамическая модель | 5.6.1.3 Двухпараметрическая аэродинамическая модель |
5.6.2 Модель механического модуля. Двухмассовая мо-дель (5.6.2. 5.6.2.1) | 5.6.2 Механические модели |
5.6.2.1 Двухмассовая модель | |
5.6.3 Модели генератора | 5.6.3 Модели модуля генератора |
5.6.3.1 Модель асинхронного генератора | 5.6.3.1 Модель асинхронного генератора |
5.6.3.2 Модель генератора ВЭУ типа ЗА | 5.6.3.2 Модель модуля асинхронного генератора типа ЗА |
5.6.3.3 Модель генератора ВЭУ типа ЗВ | 5.6.3.3 Модель модуля асинхронного генератора типа ЗВ |
5.6.3.4 Модель генератора ВЭУ типа 4 | 5.6.3.4 Модель модуля генератора типа 4 |
5.6.3.5 Модель вращения опорной системы отсчета | 5.6.3.5 Модель вращения опорной системы отсчета |
5.6.4 Модели электрооборудования | 5.6.4 Электрическое оборудование |
5.6.4.1 Модели шунтирующего конденсатора | 5.6.4.1 Модели шунтирующего конденсатора |
5.6.4.2 Модель автоматического выключателя | 5.6.4.2 Модель автоматического выключателя |
5.6.4.3 Модель трансформатора | 5.6.4.3 Модель трансформатора |
5.6.5 Модели управления | 5.6.5 Модели управления |
5.6.5.1 Модель регулирования мощности посредством изменения угла установки лопастей | 5.6.5.1 Модель регулирования мощности посредством изменения утла установки лопастей |
5.6.5.2 Модель управления утлом установки лопастей | 5.6.5.2 Модель управления углом установки лопастей |
5.6.5.3 Модель регулирования сопротивления ротора генератора | 5.6.5.3 Модель регулирования сопротивления ротора генератора |
5.6.5.4 Модель регулирования активной мощности ВЭУ типа 3 | 5.6.5.4 Модель регулирования активной мощности типа 3 |
5.6.5.5 Модель регулирования активной мощности ВЭУ типа 4А | 5.6.5.5 Модель регулирования активной мощности типа 4А |
5.6.5.6 Модель регулирования активной мощности ВЭУ типа 4В | 5.6.5.6 Модель регулирования активной мощности типа 4В |
5.6 5.7 Модель регулирования реактивной мощности | 5 6.5.7 Модель регулирования реактивной мощности |
5.6.5.8 Модель ограничения тока | 5.6.5.8 Модель ограничения тока |
5.6.5 9 Модель ограничения реактивной мощности | 5.6.5.9 Модель ограничения реактивной мощности |
5.6.5.10 Модель ограничения реактивной и активной мощности или реактивной мощности и напряжения | 5.6.5.10 Модель ограничения реактивной и активной мощности или реактивной мощности и напряжения |
5.6.6 Модель защиты электрической сети | 5.6.6 Модель защиты электрической сети |
6 Проверка моделей | 6 Требования к порядку проверки соответствия |
6.1 Общие положения | 6.1 Общие положения |
6.2 Общие требования (6.2, 6.3.1.4. 6.3.2.3. 6.3.3.3) | 6.2 Общие требования |
6.3 Проверка реакции модели на провалы напряжения (6.3.1) | 6.3 Порядок проверки соответствия |
78
Окончание таблицы ДБ. 1
ГОСТ Р 54418.27.1—2019
Структура настоящего стандарта | Сгру*тура международного стандарта МЭК 61400-27-1.2015 |
6.3.1 Общие положения (6.3.1.1} | 6.3.1 Провалы напряжения |
6.3.2 Измеряемые входные переменные (6.3.1.1) | 6.3.1.1 Измеряемые входные переменные |
6.3.3 Обработка сигналов (6.3.1.2) | 6.3.1.2 Обработка сигналов |
6.3.4 Определение временных интервалов (6.3.1.3) | 6.3.1.3 Определение временных интервалов |
• | 6.3.1.4 Представление результатов |
6.4 Проверка реакции модели на изменение опорных значений (6.3.2} | 6.3.2 Изменения опорных значений |
6.4.1 Общие положения (6.3.2.1} | 6.3.2.1 Данные измерений |
6.4.2 Измеряемые входные переменные (6.3.2.1) | 6.3.2.2 Настройка имитационной модели |
6.4.3 Моделирование (6.3.2.2. 6.3.2.3) | 6.3.2.3 Представление результатов |
6.5 Проверка модели защиты электрической сети (6.3.3) | 6.3.3 Защита электрической сети |
6.5.1 Общие положения (6.3.3.1. 6.3.3.2) | 6.3.3.1 Измеряемые входные переменные |
6.5.2 Проверка защиты от перенапряжения (6.3.3.2 а)} | 6.3.3.2 Порядок моделирования |
6.5.3 Проверка защиты от понижения напряжения (6.3.3.2 Ь)) | |
6.5.4 Проверка защиты от повышения частоты (6.3.3.2 с)) | |
6.5.5 Проверка защиты от понижения частоты (6.3.3.2 d)) | |
6.3.3.3 Представление результатов | |
Приложение А Упрощенная модель ветроэнергетической станции(приложение D) | Приложение А Документация испытаний проверки соответствия |
Приложение В Каталог типовых звеньев (приложение G) | Приложение В Пределы возможной точности модели |
Приложение С Двухпараметрическая аэродинамическая модель(приложение Е) | Приложение С Цифровой фильтр низкой частоты 2-го порядка с критическим затуханием |
Приложение D Пределы возможной точности модели (приложение В) | Приложение D Упрощенная модель уровня ветроэнергетической станции |
Приложение Е Пример составления отчета о проверке модели (Приложение А) | Приложение Е Двумерная аэродинамическая модель |
Приложение F Цифровой фильтр низкой частоты 2-го порядка с критическим затуханием (приложение С) | Приложение F Общее сопряжение программного обеспечения для применения с различными программными комплексами моделирования |
Приложение G Общее сопряжение программного обеспечения для применения с различными программными комплексами моделирования (приложение F) | Приложение G Каталог обозначений звеньев |
Приложение ДА Сведения о соответствии ссылочных национальных и межгосударственных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте | |
Приложение ДБ Сопоставление структуры настоящего стандарта со структурой примененного в нем международного стандарта | |
• Данный раздел исключен, т. к. его положения размещены в других разделах. ” Включение в настоящий стандарт данных разделов и подразделов обусловлено необходимостью приведения его в соответствие с требованиями ГОСТ 1.5. Примечание — После заголовков разделов (подразделов) настоящего стандарта приведены в скобках номера аналогичных им разделов (подразделов, пунктов} международного стандарта. | |
79
ГОСТ Р 54418.27.1—2019
Библиография | |
(1] МЭК 61000 (все части) [2] МЭК 60050 (все части) | Электромагнитная совместимость [Electromagnetic compatibility (EMC)} Международный электротехнический словарь (International electrotechnical vocabulary) |
[3] Правила технологического функционирования электроэнергетических систем
[4] F. J. Buendia and В. В. Gordo. Generic simplified simulation model for DFIG with active crowbar. Proceedings of 11th International Workshop on Large-Scale Integration of Wind Power into Power Systems. November 2012, Lisbon. Portugal
80
ГОСТ Р 54418.27.1—2019
УДК 697.329:006.354 ОКС 27.160
Ключевые слова: установки ветроэнергетические, электрические характеристики, имитационные модели
81
БЗ 12—2019/106
Редактор Л. В. Каретникова Технический редактор И.Е. Черепкова Корректор Л.С. Лысенко Компьютерная верстка Е.О. Асташина
Слано в набор 05.12.2019. Подписано о печать 17.01.2020. Формат 00"041.‘8. Гарнитура Ариал.
Усл. печ. п. 9.77. Уч.-изд. л. 8.30.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении во дпя комплектования Федерального информационного Фонда стандартов. 117418 Москва. Нахимовский пр-т. д. 31. к. 2 www.go5linFo.ru inFo^gostinFo ru
{kind=link}