ГОСТ 21098-82
Группа Г02
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
ЦЕПИ КИНЕМАТИЧЕСКИЕ
Методы расчета точности
Cinematik chains. Methods of calculation accuraci
Дата введения 1984-01-01
РАЗРАБОТАН Министерством высшего и среднего специального образования РСФСР
ИСПОЛНИТЕЛИ
В.А.Вышлов, канд. техн. наук (руководитель темы); С.С.Воронов, канд. техн. наук; Л.В.Гусакова
ВНЕСЕН Министерством высшего и среднего специального образования РСФСР
Зам. министра Э.К.Калинин
УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Государственного комитета СССР по стандартам от 20 декабря 1982 г. N 4911
Настоящий стандарт устанавливает методы расчета точности кинематических цепей, состоящих из нерегулируемых зубчатых, червячных и реечных передач и передачи винт-гайка, без учета упругих деформаций.
1. ЦЕЛИ И МЕТОДЫ РАСЧЕТА ТОЧНОСТИ КИНЕМАТИЧЕСКИХ ЦЕПЕЙ
1.1. Устанавливаемые настоящим стандартом методы расчета предназначены для проведения анализа точности кинематических цепей с использованием вероятностного метода и метода максимума-минимума.
1.2. Анализ точности имеет своей целью определение значений показателей точности кинематических цепей, исходя из известных значений показателей точности составляющих звеньев.
1.3. Анализ точности кинематических цепей может проводиться на ЭВМ по алгоритму, приведенному в приложении 3.
1.4. При расчете точности кинематических цепей следует применять:
метод расчета на максимум-минимум, учитывающий только предельное отклонение звеньев кинематической цепи и самые неблагоприятные их сочетания;
вероятностный метод расчета, учитывающий рассеяние погрешностей и вероятность различных сочетаний отклонений составляющих звеньев кинематической цепи.
1.5. При проведении анализа точности кинематических цепей вероятностным методом процент риска должен выбираться из соображений экономической целесообразности с учетом технических требований к кинематическим цепям. При расчете практически предельного значения кинематической погрешности и мертвого хода процент риска равен 0,27%.
2. ОСНОВНЫЕ РАСЧЕТНЫЕ ФОРМУЛЫ
2.1. Передаточный коэффициент погрешности передач
 , (1)
, (1)
где - число зубьев ведущих зубчатых колес или число заходов червяка;
- число зубьев ведомых зубчатых (червячных) колес.
Примечания:
1. Формула (1) справедлива для расчета передаточных коэффициентов передач при задании погрешностей звеньев в угловых единицах.
2. Термины, применяемые в настоящем стандарте, и их пояснения приведены в рекомендуемом приложении 1.
2.2. Минимальное значение кинематической погрешности передач, мкм.
Передачи зубчатые цилиндрические по ГОСТ 1643-81 и ГОСТ 9178-81
![]() (2)
(2)
для степеней точности 7,8
![]() (3)
(3)
Передачи зубчатые конические по ГОСТ 1758-81 и ГОСТ 9368-81
![]() (4)
(4)
для степеней точности 7,8
![]() (5)
(5)
Передачи червячные цилиндрические по ГОСТ 3675-81 и ГОСТ 9774-81
![]() (6)
(6)
Передачи зубчатые реечные по ГОСТ 10242-81 и ГОСТ 13506-81
![]() (7)
(7)
для степеней точности 7,8
![]() (8)
(8)
Передача винт-гайка
![]() (9)
(9)
Примечание. Значения коэффициентов фазовой компенсации выбираются из табл.1 или 3 в зависимости от вида передач.
2.3. Максимальное значение кинематической погрешности передач, мкм.
Передачи зубчатые цилиндрические по ГОСТ 1643-81 и ГОСТ 9178-81
![]() (10)
(10)
Передачи зубчатые конические по ГОСТ 1758-81 и ГОСТ 9368-81
![]() (11)
(11)
Передачи червячные цилиндрические по ГОСТ 3675-81 и ГОСТ 9774-81
![]() (12)
(12)
Передачи зубчатые реечные по ГОСТ 10242-81 и ГОСТ 13506-81
![]() (13)
(13)
Передачи винт-гайка
![]() (14)
(14)
Примечания:
1. Значения коэффициентов фазовой компенсации выбираются из табл.1 и 3 в зависимости от видов передач.
2. Значения рассчитываются в соответствии с рекомендуемым приложением 2.
2.4. Минимальное значение мертвого хода передач, мкм.
Передача винт-гайка
![]() (15)
(15)
Остальные виды передач
![]() (16)
(16)
2.5. Максимальное значение мертвого хода передач, мкм.
Передачи зубчатые цилиндрические по ГОСТ 1643-81 и ГОСТ 9178-81
![]() (17)
(17)
Передачи зубчатые конические по ГОСТ 1758-81 и ГОСТ 9368-81
 (18)
(18)
Передачи червячные цилиндрические по ГОСТ 3675-81 и ГОСТ 9774-81
![]() (19)
(19)
Передачи зубчатые реечные по ГОСТ 10242-81 и ГОСТ 13506-81
![]() (20)
(20)
Передача винт-гайка
![]() (21)
(21)
Примечание. и
соответственно осевой и радиальный зазоры в опорах вращения; принимаются равными соответственно осевым и радиальным биениям, рассчитываемым по рекомендуемому приложению 2.
2.6. Значение кинематической погрешности и мертвого хода передач в угловых единицах, (...).
Для зубчатых и червячных передач
![]() , (22)
, (22)
где - диаметр делительной окружности ведомого колеса, мм
![]() (23)
(23)
Для передачи винт-гайка
![]() , (24)
, (24)
где - ход резьбы, мм
![]() (25)
(25)
2.7. Координата середины поля рассеяния кинематической погрешности и мертвого хода передач, (...).
![]() ; (26)
; (26)![]() , (27)
, (27)
где - порядковый номер передачи.
2.8. Поле рассеяния кинематической погрешности и мертвого хода передач, (...).
![]() ; (28)
; (28)![]() . (29)
. (29)
2.9. Координата середины поля рассеяния кинематической погрешности и мертвого хода кинематической цепи, (...).
![]() (30)
(30)
2.10. Значение кинематической погрешности и мертвого хода кинематической цепи, (...).
При расчете по методу максимума-минимума
![]() ; (31)
; (31)![]() . (32)
. (32)
При расчете по вероятностному методу
 (33)
(33)
Значение коэффициента в зависимости от принимаемого процента риска
выбирается из следующего ряда.
Процент риска | 10 | 4,5 | 1,0 | 0,27 |
Коэффициент | 0,26 | 0,35 | 0,48 | 0,57 |
Примечание. Значение кинематической погрешности передачи при расчете по вероятностному методу
![]() (34)
(34)
Значение коэффициента в зависимости от вида передачи и принимаемого процента риска
выбирается из табл.2, 4, 5, 6
 (35)
(35)
Значение коэффициента в зависимости от принимаемого процента риска
выбирается из следующего ряда.
Процент риска | 10 | 4,5 | 1,0 | 0,27 |
Коэффициент | 0,21 | 0,28 | 0,39 | 0,46 |
Примечание. В случае необходимости значения кинематической погрешности и мертвого хода кинематической цепи могут быть приведены к ее входу путем деления полученных значений на передаточное отношение цепи.
2.11. В том случае, если выходное колесо одной или нескольких передач совершает неполный оборот, соответствующие значения кинематических погрешностей, рассчитанных по формулам (2-8, 10-13), умножаются на коэффициент , значение которого в зависимости от угла поворота выходного колеса
выбирается из следующего ряда.
Угол поворота | 30 | 60 | 90 | 120 | 150 | 180 |
Коэффициент | 0,02 | 0,07 | 0,15 | 0,25 | 0,37 | 0,5 |
Продолжение
Угол поворота | 210 | 240 | 270 | 300 | 330 | 360 |
Коэффициент | 0,63 | 0,75 | 0,85 | 0,93 | 0,98 | 1 |
3. ПОСЛЕДОВАТЕЛЬНОСТЬ РАСЧЕТОВ
Последовательность расчетов точности кинематических цепей вероятностным методом и методом максимума-минимума приведена ниже (в скобках указаны номера формул).
3.1. По соответствующей нормативно-технической документации и рабочим чертежам устанавливаются значения величин, необходимые для расчета кинематической погрешности и мертвого хода.
3.2. Рассчитываются значения передаточных коэффициентов (1).
3.3. Расчет кинематической погрешности
3.3.1. Рассчитываются максимальные и минимальные значения кинематической погрешности передач, составляющих кинематическую цепь (2-14).
3.3.2. Максимальные и минимальные значения кинематических погрешностей передач переводятся из линейных единиц в угловые (22, 24).
3.3.3. Рассчитываются координаты середин полей рассеяния и поля рассеяния кинематических погрешностей передач (26, 28).
3.3.4. Рассчитывается координата середины поля рассеяния кинематической погрешности цепи (30).
3.3.5. При вероятностном расчете выбирается процент риска.
3.3.6. Рассчитывается значение кинематической погрешности цепи:
по методу максимума-минимума (31);
по вероятностному методу (33).
3.4. Расчет мертвого хода
3.4.1. Рассчитываются максимальные и минимальные значения мертвого хода передач, составляющих кинематическую цепь (15-21).
3.4.2. Максимальные и минимальные значения мертвого хода передач переводятся из линейных единиц в угловые (23, 25).
3.4.3. Рассчитываются координаты середин полей рассеяния и поля рассеяния мертвого хода передач (27, 29).
3.4.4. Рассчитывается координата середины поля рассеяния мертвого хода кинематической цепи (30).
3.4.5. При вероятностном расчете выбирается процент риска.
3.4.6. Рассчитывается значение мертвого хода кинематической цепи:
по методу максимума-минимума (32);
по вероятностному методу (35).
Таблица 1
Значение коэффициента фазовой компенсации. Зубчатая передача
| Отношение чисел зубьев колес | |||||
Обозначение коэффициента фазовой компенсации | от 1,0 | св. 1,5 | св. 2,0 | св. 2,5 | св. 3,0 | св. 3,5 |
Значение коэффициента фазовой компенсации | ||||||
0,98 | 0,85 | 0,83 | 0,93 | 0,97 | 0,96 | |
0,30 | 0,76 | 0,75 | 0,74 | 0,75 | 0,80 | |
Продолжение табл.1
Обозначение коэффициента фазовой компенсации | Отношение чисел зубьев колес | |||||
св. 4,0 | св. 4,5 | св. 5,0 | св. 5,5 | св. 6,0 | св. 6,5 | |
Значение коэффициента фазовой компенсации | ||||||
0,96 | 0,96 | 0,98 | 0,96 | 0,97 | 0,98 | |
0,90 | 0,87 | 0,85 | 0,88 | 0,94 | 0,99 | |
Примечания:
1. По известному отношению чисел зубьев колес ![]() ; (
; (![]() ) выбираются коэффициенты
) выбираются коэффициенты ![]() .
.
2. Для передаточных отношений, не выражаемых целым числом, в случае работы передачи в пределах больше одного оборота колеса ![]() =0,98.
=0,98.
Таблица 2
Значение вероятностных коэффициентов. Зубчатая передача
Процент риска | Отношение чисел зубьев колес | |||||
от 1,0 | св. 1,5 | св. 2,0 | св. 2,5 | св. 3,0 | св. 3,5 | |
Значение коэффициента фазовой компенсации | ||||||
32 | 0,58 | 0,68 | 0,60 | 0,74 | 0,71 | 0,71 |
10 | 0,92 | 0,78 | 0,73 | 0,88 | 0,82 | 0,82 |
4,5 | 0,95 | 0,83 | 0,81 | 0,91 | 0,92 | 0,91 |
1 | 0,96 | 0,84 | 0,82 | 0,92 | 0,95 | 0,95 |
Продолжение табл.2
Процент риска | Отношение чисел зубьев колес | |||||
св. 4,0 | св. 4,5 | св. 5,0 | св. 5,5 | св. 6,0 | св. 6,5 | |
Значение коэффициента фазовой компенсации | ||||||
32 | 0,68 | 0,71 | 0,78 | 0,70 | 0,78 | 0,80 |
10 | 0,80 | 0,82 | 0,90 | 0,88 | 0,91 | 0,94 |
4,5 | 0,88 | 0,92 | 0,94 | 0,94 | 0,94 | 0,96 |
1 | 0,94 | 0,95 | 0,97 | 0,95 | 0,96 | 0,96 |
Примечание. По известному отношению чисел зубьев ![]() ; (
; (![]() ) выбирается коэффициент
) выбирается коэффициент .
Таблица 3
Значение коэффициента фазовой компенсации. Зубчатая реечная передача
Коэффициент фазовой компенсации | Приведенное передаточное отношение | |||||||
от 0,25 до 0,50 | св. 0,50 до 0,75 | св. 0,75 до 1,00 | св. 1,00 до 1,25 | св. 1,25 до 1,50 | св. 1,50 до 1,75 | св. 1,75 до 2,00 | ||
Значение коэффициента фазовой компенсации | ||||||||
0,90 | 0,95 | 0,80 | 0,80 | 0,95 | 0,95 | 0,88 | ||
0,07 | 0,17 | 0,40 | 0,65 | 0,65 | 0,60 | 0,59 | ||
Продолжение табл.3
Коэффициент фазовой компенсации | Приведенное передаточное отношение | ||||||
св. 2,00 до 2,25 | св. 2,25 до 2,50 | св. 2,50 до 2,75 | св. 2,75 до 3,00 | св. 3,00 до 3,25 | св. 3,25 до 3,50 | св. 3,50 | |
Значение коэффициента фазовой компенсации | |||||||
0,87 | 0,94 | 0,98 | 0,92 | 0,90 | 0,95 | 0,98 | |
0,68 | 0,78 | 0,72 | 0,68 | 0,73 | 0,83 | 0,98 | |
Примечание. По известному приведенному передаточному отношению ![]() находятся коэффициенты
находятся коэффициенты ![]() . Коэффициенты фазовой компенсации, приведенные в ГОСТ 10242-81, следует рассматривать как близкие к вероятностным.
. Коэффициенты фазовой компенсации, приведенные в ГОСТ 10242-81, следует рассматривать как близкие к вероятностным.
Таблица 4
Значение вероятностного коэффициента. Зубчатая реечная передача
Процент риска | Приведенное передаточное отношение | |||||
от 0,25 | св. 0,50 | св. 0,75 | св. 1,00 | св. 1,25 | св. 1,50 | |
Значение коэффициента фазовой компенсации | ||||||
32 | 0,54 | 0,62 | 0,42 | 0,54 | 0,70 | 0,70 |
10 | 0,81 | 0,83 | 0,75 | 0,70 | 0,86 | 0,86 |
4,5 | 0,85 | 0,87 | 0,77 | 0,76 | 0,88 | 0,88 |
1,0 | 0,88 | 0,89 | 0,78 | 0,78 | 0,89 | 0,89 |
Продолжение табл.4
Процент риска | Приведенное передаточное отношение | ||||||
св. 1,75 | св. 2,00 | св. 2,25 | св. 2,50 | св. 2,75 | св. 3,00 | св. 3,25 | |
Значение коэффициента фазовой компенсации | |||||||
32 | 0,76 | 0,73 | 0,76 | 0,76 | 0,73 | 0,76 | 0,78 |
10 | 0,86 | 0,81 | 0,84 | 0,91 | 0,82 | 0,86 | 0,91 |
4,5 | 0,84 | 0,84 | 0,90 | 0,93 | 0,86 | 0,90 | 0,94 |
1,0 | 0,86 | 0,86 | 0,93 | 0,95 | 0,88 | 0,99 | 0,96 |
Примечание. По известному приведенному передаточному отношению ![]() и проценту риска
и проценту риска выбирается значение коэффициента
.
Таблица 5
Значение вероятностных коэффициентов. Червячная передача
Процент риска | 32 | 10 | 4,5 | 1,0 | 0,27 |
Коэффициент | 0,79 | 0,87 | 0,89 | 0,92 | 0,93 |
Примечание. По известному проценту риска выбирается коэффициент
.
Таблица 6
Значение вероятностных коэффициентов. Передача винт-гайка
Процент риска | 32 | 10 | 4,5 | 1,0 | 0,27 |
Коэффициент | 0,76 | 0,80 | 0,86 | 0,96 | 0,98 |
Примечание. По известному проценту риска выбирается коэффициент
.
ПРИЛОЖЕНИЕ 1
Рекомендуемое
ТЕРМИНЫ, ПРИМЕНЯЕМЫЕ В НАСТОЯЩЕМ СТАНДАРТЕ,
ИХ ОБОЗНАЧЕНИЯ И ПОЯСНЕНИЯ
1. Кинематическая цепь - совокупность звеньев или механизмов, предназначенных для передачи движения.
2. Теоретическая кинематическая цепь - кинематическая цепь, составленная из звеньев с абсолютно точными размерами.
3. Реальная кинематическая цепь - кинематическая цепь, составленная из звеньев, которые имеют отклонения от заданных размеров и форм.
4. Ведущее звено - звено передачи, которое сообщает движение парному звену передачи.
5. Ведомое звено - звено передачи, которому сообщает движение парное звено передачи.
6. Погрешность положения - разность положений ведомого звена реальной и теоретической кинематических цепей для одинаковых положений ведущего звена.
7. Кинематическая погрешность кинематической цепи - алгебраическая разность между погрешностями положений ведомого звена кинематической цепи (черт.1)
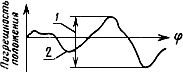
1 - кинематическая погрешность; 2 - погрешность положения
Черт.1
8. Максимальная кинематическая погрешность кинематической цепи ![]() - наибольшее возможное значение кинематической погрешности кинематической цепи.
- наибольшее возможное значение кинематической погрешности кинематической цепи.
9. Минимальная кинематическая погрешность кинематической цепи ![]() - наименьшее возможное значение кинематической погрешности кинематической цепи, рассчитанное с учетом возможных компенсаций.
- наименьшее возможное значение кинематической погрешности кинематической цепи, рассчитанное с учетом возможных компенсаций.
10. Прямой ход - выбранное направление движения звеньев кинематической цепи.
11. Обратный ход - направление движения звеньев кинематической цепи, противоположное прямому ходу.
12. Мертвый ход кинематической цепи - разность положений ведомого звена для одинаковых положений ведущего звена при прямом и обратном ходах кинематической цепи (черт.2).
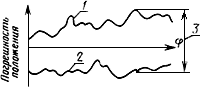
1 - погрешность положения при прямой ходе;
2 - погрешность положения при обратном ходе; 3 - мертвый ход
Черт.2
13. Передаточный коэффициент погрешности - коэффициент влияния, учитывающий изменение кинематической погрешности передачи при приведении ее к выходному звену кинематической цепи.
14. Передаточное отношение кинематической цепи - произведение передаточных отношений передач, составляющих кинематическую цепь.
Отклонения, погрешности, допуски
15. Допуск на кинематическую погрешность колеса - по ГОСТ 1643-81, ГОСТ 1758-81, ГОСТ 3675-81, ГОСТ 9178-81, ГОСТ 9368-81, ГОСТ 9774-81.
16. Допуск на кинематическую погрешность зубчатой рейки - по ГОСТ 10242-81, ГОСТ 13506-81.
17. Допуск на погрешность винтовой линии на длине нарезанной части червяка - по ГОСТ 9774-81, ГОСТ 3675-81.
18. Допуск на погрешность профиля витка червяка - по ГОСТ 9774-81, ГОСТ 3675-81.
19. Наименьшее смещение исходного контура - по ГОСТ 1643-81, ГОСТ 9178-81, ГОСТ 10242-81, ГОСТ 13506-81.
20. Наименьшее отклонение толщины витка червяка по хорде - по ГОСТ 9774-81, ГОСТ 3675-81.
21. Наименьшее отклонение средней делительной толщины зуба по хорде - по ГОСТ 1758-81, ГОСТ 9368-81.
22. Допуск на смещение исходного контура - по ГОСТ 1643-81, ГОСТ 9178-81, ГОСТ 10242-81, ГОСТ 13506-81.
23. Допуск на толщину витка червяка по хорде - по ГОСТ 3675-81, ГОСТ 9774-81.
24. Допуск на среднюю делительную толщину зуба по хорде - по ГОСТ 1758-81, ГОСТ 9368-81.
25. Накопленная погрешность шага резьбы - разность между действительным и номинальным расстояниями между любыми несоседними профилями витков по образующим среднего диаметра.
26. Предельное отклонение среднего диаметра винта:
верхнее ; нижнее
- по ГОСТ 9562-60*.
_______________
* Действует ГОСТ 9562-81, здесь и далее по тексту. - .
27. Верхнее отклонение среднего диаметра гайки - по ГОСТ 9562-60.
28. Предельные отклонения межосевого расстояния - по ГОСТ 1643-81, ГОСТ 9178-81, ГОСТ 10242-81, ГОСТ 13506-81.
29. Предельные отклонения межосевого расстояния в передаче - по ГОСТ 9774-81, ГОСТ 3675-81.
30. Предельные осевые смещения зубчатого венца ![]() - по ГОСТ 1758-81, ГОСТ 9368-81.
- по ГОСТ 1758-81, ГОСТ 9368-81.
31. Предельные отклонения межосевого угла - по ГОСТ 1758-81, ГОСТ 9368-81.
32. Предельные отклонения межосевого расстояния в обработке - по ГОСТ 3675-81, ГОСТ 9774-81.
33. Гарантированный боковой зазор - по ГОСТ 1643-81, ГОСТ 1758-81, ГОСТ 9368-81, ГОСТ 3675-81, ГОСТ 9774-81, ГОСТ 10242-81, ГОСТ 13506-81, ГОСТ 9178-81.
34. Номинальный межосевой угол в передаче - по ГОСТ 16530-70*.
_______________
* Действует ГОСТ 16530-83. - .
35. Угол наклона винтовой линии - по ГОСТ 11703-66
36. Поле рассеяния - по ГОСТ 16319-80.
37. Координата середины поля рассеяния - по ГОСТ 16319-80.
38. Коэффициент риска - по ГОСТ 16319-80.
39. Фазовая компенсация - уменьшение кинематической погрешности передачи в зависимости от начального относительного положения звеньев.
40. Коэффициент фазовой компенсации ,
- коэффициент, учитывающий степень изменения кинематической погрешности от начального положения звеньев.
41. Монтажное радиальное биение зубчатого колеса - составляющая радиального биения зубчатого венца колеса, вращающегося на рабочей оси, определяемая радиальным биением поверхности, сопряженной с посадочным местом колеса.
42. Монтажное осевое биение зубчатого колеса - составляющая осевого биения зубчатого венца колеса, вращающегося на рабочей оси, определяемая осевым биением поверхности, сопряженной с посадочным местом колеса.
43. Первичные радиальные биения колеса - погрешности, создающие радиальные биения поверхности, сопрягаемой с посадочным местом колеса.
44. Первичные осевые биения колеса - погрешности, создающие осевые биения поверхности, сопрягаемой с посадочным местом колеса.
ПРИЛОЖЕНИЕ 2
Рекомендуемое
РАСЧЕТ ПОГРЕШНОСТИ МОНТАЖА
1. Колеса зубчатые цилиндрические, конические и червячные
1.1. Показателями точности монтажа зубчатых колес являются:
а) - монтажное радиальное биение зубчатого колеса;
б) - монтажное осевое биение зубчатого колеса.
1.2. Суммарная приведенная погрешность монтажа вычисляется на основании зависимости
 , (1)
, (1)
где - угол исходного профиля колеса;
- делительный угол наклона линии зуба, для конических зубчатых колес - к образующей начального конуса.
1.3. В том случае, если не заданы допуски на монтажные радиальные и осевые биения зубчатых колес, их следует принимать равными:
 , (2)
, (2)
где - допуски на погрешности, создающие первичные радиальные биения колеса;
- допуски на погрешности, создающие первичные осевые биения колеса.
1.4. Допуски на погрешности, создающие первичные радиальные и осевые биения колеса, определяются на основании рабочих чертежей или другой технической документации.
2. Цилиндрические червяки
2.1. Показателями точности монтажа червяка являются радиальное биение витков и осевое биение
.
2.2. Суммарная приведенная погрешность монтажа вычисляется на основании зависимости
![]() ,* (3)
,* (3)
где - торцовый угол профиля;
* - делительный угол подъема линии витка червяка.
_______________
* Формула и экспликация к ней соответствуют оригиналу. - .
3. Винты
3.1. Показателями точности монтажа винта являются радиальное биение витков и осевое биение
.
3.2. Суммарная приведенная погрешность монтажа вычисляется на основании зависимости
![]() (4)
(4)
ПРИЛОЖЕНИЕ 3
Рекомендуемое
РАСЧЕТ КИНЕМАТИЧЕСКОЙ ТОЧНОСТИ ЦЕПЕЙ НА ЭЦВМ
1. Рекомендуемый алгоритм расчета кинематической погрешности и мертвого хода согласно черт.1.
2. Исходные данные для расчета подготавливаются согласно таблице рекомендуемого приложения 5.
3. Алгоритм выводит на печать значения кинематической погрешности и мертвого хода каждой ступени цепи, суммарное значение кинематической погрешности и мертвого хода, рассчитанные по формулам (31, 33) и (32, 35) соответственно методами максимума-минимума и вероятностным.
4. В том случае, если алгоритм преимущественно используется для определения кинематической точности одних типов передач, он может быть упрощен путем исключения блоков расчета неиспользуемых видов передач.
5. При необходимости алгоритм может быть приращен путем включения блоков расчета дополнительных видов передач.
6. При использовании ЭВМ малой мощности (Электроника 100, ЭКВМ ТЗ-16 и т.п.) рекомендуется вместе с числом передач последовательно вводить исходные данные.
Примечание. Тип передачи:
1 - зубчатая цилиндрическая;
2 - зубчатая коническая;
3 - червячная цилиндрическая;
4 - зубчатая реечная;
5 - винт-гайка.
,
- значения, рассчитанные вероятностным методом.
Рекомендуемый алгоритм расчета кинематической точности цепи
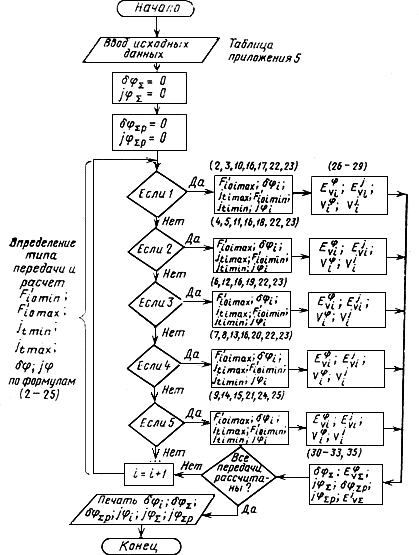
В скобках указаны номера расчетных формул из стандарта
Черт.1
ПРИЛОЖЕНИЕ 4
Рекомендуемое
ПРИМЕРЫ РАСЧЕТА КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ
Пример 1
Задача. Рассчитать кинематическую погрешность зубчатой передачи 7-С по ГОСТ 1643-81.
=3;
=25;
=90;
=
=20 мкм;
=10%.
Решение провести методами максимума-минимума и вероятностным.
Решение. По ГОСТ 1643-81 и табл.1 и 2 настоящего стандарта находим значения величин, необходимые для расчета:
=56 мкм;
=76 мкм;
=0,96;
=0,82.
Рассчитывается кинематическая погрешность, мкм:
а) метод максимума-минимума (10)
![]() ;
;
б) вероятностный метод (34)
![]() .
.
Пример 2
Задача. Рассчитать кинематическую погрешность зубчатой реечной передачи.
Зубчатое колесо 6-С по ГОСТ 1643-81: =20;
=20 мкм.
Зубчатая рейка 6-С по ГОСТ 10242-81: =28;
=3;
=4,5%.
Решение провести методами максимума-минимума и вероятностным.
Решение. По ГОСТ 1643-81, ГОСТ 10242-81 и табл.3 и 4 настоящего стандарта находим значения величин, необходимые для расчета:
=40 мкм;
=52 мкм;
=0,95;
=0,88.
Рассчитывается кинематическая погрешность, мкм:
а) метод максимума-минимума (13)
![]() ;
;
б) вероятностный метод (34)
![]() .
.
Пример 3
Задача. Рассчитать кинематическую погрешность червячной передачи СТ-5 по ГОСТ 3675-81:
=2;
=80;
=1;
=
=15 мкм;
=20°;
=20°;
![]() =21,5 мкм;
=21,5 мкм; =4,5%.
Решение провести методами максимума-минимума и вероятностным.
Решение. По ГОСТ 3675-81 находим значения величин, необходимые для расчета: =14 мкм;
=7,1 мкм;
=23 мкм;
=0,89;
![]() мкм.
мкм.
Рассчитывается кинематическая погрешность, мкм:
а) метод максимума-минимума (12)
![]() ;
;
б) вероятностный метод (34)
![]() .
.
Пример 4
Задача. Рассчитывать кинематическую погрешность передачи винт-гайка: =50 мкм;
=30 мкм;
=4,5%;
=0,86.
Решение провести методами максимума-минимума и вероятностным.
Решение
Рассчитывается кинематическая погрешность, мкм:
а) метод максимума-минимума (14)
![]() ;
;
б) вероятностный метод (34)
![]() .
.
ПРИЛОЖЕНИЕ 5
Рекомендуемое
ПРИМЕРЫ РАСЧЕТА КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ И МЕРТВОГО ХОДА
Пример 1
Задача. Определить значения кинематической погрешности и мертвого хода кинематической цепи (черт.1).
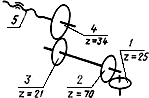
Черт.1
Зубчатые колеса 1 и 2 - Ст-6-D по ГОСТ 1758-81: =25;
=70;
=3;
=
![]() =20 мкм;
=20 мкм; =20°;
=0; угол делительного конуса
=19°40';
=70°20'; среднее конусное расстояние
=111,5 мм.
Зубчатые колеса 3 и 4 - Ст-6-С по ГОСТ 1643-81: =21;
=34;
=2;
=
![]() =15 мкм;
=15 мкм; =20°.
Передача винт-гайка: =12;
=100 мм;
=10 мкм;
=10 мкм. Осевой и радиальный зазоры в опорах вращения практически равны нулю. Решение задачи провести методами максимума-минимума и вероятностным.
Решение. 1. По ГОСТ 1758-81, ГОСТ 1643-81, ГОСТ 9562-60 и табл.1 настоящего стандарта находим значения величин, необходимые для расчета, мкм:=27,75;
=40,05;
=0,98;
=0,98;
=26;
=105;
=38;
=36;
=54;
=42;
=55;
![]() =52;
=52; =36;
=43;
=0,98;
=0,98;
![]() =74;
=74; ![]()
=80; ![]() =74;
=74; =715;
=82;
=800;
=30°.
2. Рассчитываются передаточные коэффициенты погрешностей передач (1)
![]() ;
; ![]() ;
; ![]() .
.
3. Рассчитываются максимальные значения кинематической погрешности и мертвого хода передач (10, 11, 14, 17, 18, 21), мкм:
![]() ;
;![]() ;
;![]() ;
;

![]() ;
;![]() .
.
4. Рассчитываются минимальные значения кинематической погрешности и мертвого хода передач (2, 4, 9, 15, 16), мкм:
![]() ;
;![]() ;
;![]() .
.
5. Максимальные и минимальные значения кинематической погрешности передач переводятся из линейных единиц в угловые (22, 24), (...):
![]() ;
;![]() ;
;![]() .
.
6. Максимальные и минимальные значения мертвого хода передач переводятся из линейных единиц в угловые (23, 25), (...):
![]() ;
;![]() ;
;![]() .
.
7. Рассчитываются координаты середин полей рассеяния и поля рассеяния кинематической погрешности передач (26, 28), (...):
![]() ;
;![]() ;
;![]() .
.
8. Рассчитываются координаты середин полей рассеяния и поля рассеяния мертвого хода передач (27, 29), (...):
![]() ;
;![]() ;
;![]() .
.
9. Рассчитывается координата середины поля рассеяния кинематической погрешности цепи (30), (...):
![]() .
.
10. Рассчитывается кинематическая погрешность цепи, (...):
а) метод максимума-минимума (31)
![]() ;
;
б) вероятностный метод (33)
выбираем =10%;
=0,26
![]() .
.
11. Рассчитывается координата середины поля рассеяния мертвого хода цепи (30), (...):
![]() .
.
12. Рассчитывается мертвый ход цепи, (...):
а) метод максимума-минимума (32)
![]() ;
;
б) вероятностный метод (35)
выбираем =10%;
=0,21
![]() .
.
Пример 2
Задача. Определить значения кинематической погрешности и мертвого хода кинематической цепи (черт.2) при условии, что: 1) зубчатое колесо 1 совершает 4 оборота, 2) зубчатое колесо 10 совершает полный оборот.
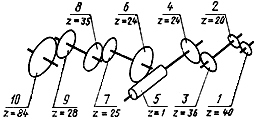
Черт.2
Зубчатые колеса Ст.6 - Gh по ГОСТ 9178-81.
Червячная передача Ст.6 - G по ГОСТ 9774-81.
Модуль =0,5;
=40;
=20;
=36;
=48;
=1;
=24;
=25;
=35;
=28;
=84;
=20;
=10;
=18;
=24;
![]() =12·0,5=6;
=12·0,5=6; =12;
=12,5;
=17,5;
=14;
=42.
Значения приведенного суммарного эксцентриситета и осевого и радиального зазоров в опорах вращения практически равны нулю.
Решение задачи провести методами максимума-минимума и вероятностным.
Решение. 1. По ГОСТ 9178-81, ГОСТ 9774-81 и табл.1 настоящего стандарта находим значения величин, необходимых для расчета. Искомые значения све
дены в таблицу.
2. Рассчитываются передаточные коэффициенты погрешности для каждой передачи (1). Передаточные коэффициенты погрешностей сведены в таблицу.
N п/п. |
|
| ||||||||
1 | 14 | 14 | 20 | 0,85 | 0,76 | 24 | _10_ | |||
2 | 12 | 20 | 23 | |||||||
3 | 14 | 16 | 20 | 0,98 | 0,3 | 24 | _5_ | |||
4 | 16 | 25 | 26 | |||||||
5 | 24 | 8 | 16 | 8 | 16 | - | - | - | _5_ | |
6 | - | 6 | - | - | ||||||
7 | 14 | 14 | 20 | 0,98 | 0,98 | 24 | 1 | |||
8 | 14 | 20 | 24 | |||||||
9 | 14 | 16 | 20 | 0,93 | 0,74 | 24 | 1 | |||
10 | 18 | 25 | 29 |
3. Рассчитываются максимальные значения кинематической погрешности и мертвого хода передач (10, 12, 17, 19), мкм:
![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() .
.
4. Рассчитываются минимальные значения кинематической погрешности и мертвого хода передач (2,6), мкм:
![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() .
.
5. Максимальные и минимальные значения кинематической погрешности передач переводятся из линейных единиц в угловые (22), (...):
![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() .
.
6. Максимальные и минимальные значения мертвого хода передач переводятся из линейных единиц в угловые (23), (...):
![]() ;
;![]() ;
;![]() ;
;
![]() ;
;![]() .
.
7. Рассчитываются координаты середин полей рассеяния и поля рассеяния кинематической погрешности передач (26, 28), (...):
![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() .
.
8. Рассчитываются координаты середин полей рассеяния и поля рассеяния мертвого хода передач (27, 29), (...):
![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() .
.
9. Рассчитывается координата середины поля рассеяния кинематической погрешности цепи (30), (...):
![]() .
.
10. Рассчитываются значения кинематической погрешности цепи, (...):
а) метод максимума-минимума (31)
![]() ;
;
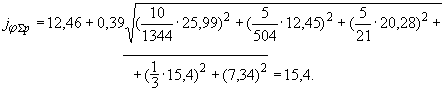
б) вероятностный метод (33)
выбираем =1%;
=0,48
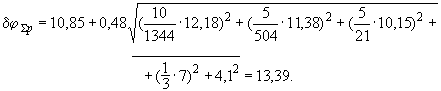
11. Рассчитывается координата середины поля рассеяния мертвого хода цепи (31), (...):
![]() .
.
12. Рассчитывается значение мертвого хода цепи, (...):
а) метод максимума-минимума (32)
![]() ;
;
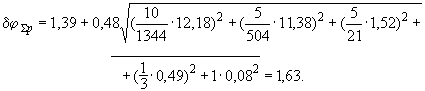
б) вероятностный метод
выбираем =1%;
=0,39
Результаты, полученные в п.10, соответствуют условию 2, т.е. зубчатое колесо 10 совершает полный оборот.
Определим значения кинематической погрешности цепи при условии 1, т.е. зубчатое колесо 1 совершает 4 оборота.
12. Рассчитываются углы поворота выходных зубчатых колес передач и выбираются коэффициенты :
![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() .
.
13. Значения кинематических погрешностей передач умножаются на соответствующие значения коэффициентов , (...
):
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() .
.
14. Рассчитываются координаты середин полей рассеяния и поля рассеяния кинематических погрешностей передач (26, 28), (...):
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
15. Рассчитывается координата середины поля рассеяния кинематической погрешности цепи (30), (...):
![]() .
.
16. Рассчитываются значения кинематической погрешности цепи, (...):
а) метод максимума-минимума (31)
![]() ;
;
б) вероятностный метод (33)
выбираем =1%;
=0,48
Электронный текст документа
и сверен по:
М.: Издательство стандартов, 1983
{kind=link}