ГОСТ Р 54369-2011
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ПРОЕКТИРОВАНИЕ, ИЗГОТОВЛЕНИЕ И ВВЕДЕНИЕ В ЭКСПЛУАТАЦИЮ СИСТЕМ УПРАВЛЕНИЯ ЭЛЕКТРООБОРУДОВАНИЕМ ДЛЯ ОБЕСПЕЧЕНИЯ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА СУДОПРОПУСКА НА ВНОВЬ ВВОДИМЫХ, РЕКОНСТРУИРУЕМЫХ И ПОДЛЕЖАЩИХ КАПИТАЛЬНОМУ РЕМОНТУ СУДОХОДНЫХ ШЛЮЗАХ
Общие требования
Unified system of standards of computer control systems. Engineering, manufacturing and bringing into operation of the control systems of electrical equipment for supply of workflow of movement of ships through newly reproduced, reconstructed and subjected to capital repairs shipping locks. General requirements
ОКС 93.160
ОКП 42 0000
Дата введения 2011-12-01
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. N 184-ФЗ "О техническом регулировании", а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 "Стандартизация в Российской Федерации. Основные положения"
Сведения о стандарте
1 РАЗРАБОТАН рабочей группой в составе: ЗАО "Траскон текнолоджи" - Самойлов В.Б., Варшавский М.Ю., Дикарев М.М., Тарасов В.В.; ФГОУ "Московская государственная академия водного транспорта" (МГАВТ) - Муравьев В.М.
2 ВНЕСЕН Федеральным агентством морского и речного транспорта Российской Федерации
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 1 августа 2011 г. N 209-ст
4 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячно издаваемых информационных указателях "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
1 Область применения
Настоящий стандарт распространяется на проектирование, изготовление и введение в эксплуатацию систем управления (СУ) электрооборудованием для обеспечения технологического процесса судопропуска на вновь вводимых, реконструируемых и подлежащих капитальному ремонту судоходных шлюзах в составе гидротехнических сооружений 1-го и 2-го классов по строительным нормам и правилам [1] и устанавливает:
- требования к инженерно-техническому обеспечению СУ;
- требования к технологическому программному обеспечению СУ;
- требования к программному обеспечению диспетчерского контроля и сбора данных;
- требования к алгоритму работы СУ;
- требования к аппаратным средствам СУ;
- требования к объему проверок и методам испытания аппаратуры СУ в заводских условиях;
- требования к объему проверок и методам испытания аппаратуры СУ в рамках пусконаладочных работ;
- требования к объему приемосдаточных испытаний СУ;
- требования к конструкторской и эксплуатационной документации, необходимой для монтажа и эксплуатации СУ.
Применение настоящего стандарта рекомендуется также при проектировании, изготовлении и введении в эксплуатацию систем управления (СУ) электрооборудованием для обеспечения технологического процесса судопропуска на вновь вводимых, реконструируемых и подлежащих капитальному ремонту судоходных шлюзах в составе гидротехнических сооружений 3-го класса по строительным нормам и правилам [1].
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р 50571.3-2009 (МЭК 60364-4-41-2005) Электроустановки низковольтные. Часть 4-41. Требования для обеспечения безопасности. Защита от поражения электрическим током
ГОСТ Р 51522-99 (МЭК 61326-1-97) Совместимость технических средств электромагнитная. Электрическое оборудование для измерения, управления и лабораторного применения. Требования и методы испытаний
ГОСТ Р 51841-2001 (МЭК 61131-2-92) Программируемые контроллеры. Общие технические требования и методы испытаний
ГОСТ Р 52549-2006 Система управления качеством и безопасностью при производстве электрооборудования
ГОСТ 12.1.030-81 Система стандартов безопасности труда. Электробезопасность. Защитное заземление, зануление
ГОСТ 21.613-88 Система проектной документации для строительства. Силовое электрооборудование. Рабочие чертежи
ГОСТ 24.104-85 Единая система стандартов автоматизированных систем управления. Автоматизированные системы управления. Общие требования
ГОСТ 24.302-80 Система технической документации на АСУ. Общие требования к выполнению схем
ГОСТ 27.003-90 Надежность в технике. Состав и общие правила задания требований по надежности
ГОСТ 34.201-89 Информационная технология. Комплекс стандартов на автоматизированные системы. Виды, комплектность и обозначение документов при создании автоматизированных систем
ГОСТ 14254-96 (МЭК 529-89) Степени защиты, обеспечиваемые оболочками (код IP)
ГОСТ 15150-69 Машины, приборы и другие технические изделия. Исполнения для различных климатических районов. Категории, условия эксплуатации, хранения и транспортирования в части воздействия климатических факторов внешней среды
ГОСТ 17703-72 Аппараты электрические коммутационные. Основные понятия. Термины и определения
ГОСТ 18311-80 Изделия электротехнические. Термины и определения основных понятий
ГОСТ 19431-84 Энергетика и электрификация. Термины и определения
ГОСТ 21480-76 Система "Человек-машина". Мнемосхемы. Общие эргономические требования
ГОСТ 23000-78 Система "Человек-машина". Пульты управления. Общие эргономические требования
ГОСТ 30631-99 Общие требования к машинам, приборам и другим техническим изделиям в части стойкости к механическим внешним воздействующим факторам при эксплуатации
МЭК 61131-3:2003* Микроконтроллеры программируемые. Часть 3. Языки программирования (IEC 61131-3:2003, Programmable controllers - Part 3: Programming languages)
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
МЭК 61158:2007 Сети передачи производственных данных (IEC 61158:2007, Industrial communication networks)
МЭК 61800-3:2004 Системы электроприводов с регулируемой скоростью. Часть 3. Стандартные требования к электромагнитной совместимости продукции и специальные методы испытаний (IEC 61800-3:2004, Adjustable speed electrical power drive systems - Part 3: EMC requirements and specific test methods)
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодно издаваемому информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по соответствующим ежемесячно издаваемым информационным указателям, опубликованным в текущем году. Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться заменяющим (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
3 Термины, определения и сокращения
3.1 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1.1 судоходный шлюз: Судоходное гидротехническое сооружение, служащее для перемещения плавучих средств (судов, составов, плотов) из водного пространства (акватории), имеющего один высотный уровень, в водное пространство, имеющее высотный уровень, отличный от первого.
3.1.2 камера шлюза: Конструктивная часть судоходного шлюза, ограниченная стенами камеры, дном камеры и верхними, нижними или промежуточными воротами, в объеме которой осуществляется вертикальное перемещение плавучих средств посредством наполнения камеры водой или ее опорожнения.
3.1.3 головы шлюза: Массивные доковые конструкции, расположенные по торцам камеры шлюза, которые оборудованы воротами для соединения или разъединения камеры с прилегающей водной поверхностью или смежной камерой шлюза (для многоступенчатых шлюзов).
3.1.4 устои: Помещения, расположенные на головах шлюза, используемые для размещения в них исполнительных механизмов и другого оборудования, необходимого для работы шлюза.
3.1.5 система наполнения: Совокупность сооружений, затворов, механизмов и приводов судоходного шлюза, регулирующая сообщение (переток воды) между верхним бьефом и камерой шлюза.
3.1.6 система опорожнения: Совокупность сооружений, затворов, механизмов и приводов судоходного шлюза, регулирующая сообщение (переток воды) между камерой шлюза и нижним бьефом.
3.1.7 верхние ворота: Подвижная конструкция, перекрывающая судоходное отверстие между верхним бьефом и камерой шлюза в закрытом состоянии ворот, в открытом состоянии ворот обеспечивается полное сечение судоходного отверстия.
3.1.8 нижние ворота: Подвижная конструкция, перекрывающая судоходное отверстие между камерой шлюза и нижним бьефом в закрытом состоянии ворот, в открытом состоянии ворот обеспечивается полное сечение судоходного отверстия.
3.1.9 промежуточные ворота: Подвижная конструкция, перекрывающая судоходное отверстие между смежными камерами шлюза в закрытом состоянии ворот, в открытом состоянии ворот обеспечивается полное сечение судоходного отверстия (для многоступенчатых шлюзов).
3.1.10 аварийные ворота: Подвижная конструкция, перекрывающая судоходное отверстие и сообщение (переток воды) между верхним бьефом и камерой шлюза с гарантированной возможностью их закрытия в аварийных условиях.
3.1.11 обеспечение технологической безопасности судопропуска: Совокупность организационных, программных и технических мероприятий, направленных на предотвращение аварийной ситуации при взаимодействии объекта управления (шлюза) с объектом обслуживания (судном).
3.1.12 технологическое состояние шлюза: Одна из фаз технологического процесса пропуска судов через шлюз. Определены следующие технологические состояния однокамерного шлюза:
- неопределенное состояние - технологическое состояние при первичном включении системы управления;
- ожидание в нижнем бьефе* - технологическое состояние ожидания судов на шлюзование, направление шлюзования не определено. В камере уровень нижнего бьефа;
_______________
* В зависимости от конструктивных особенностей шлюза это технологическое состояние может являться исходным. В исходном состоянии шлюз может находиться длительное время.
- ожидание в верхнем бьефе* - технологическое состояние ожидания судов на шлюзование, направление шлюзования не определено. В камере уровень верхнего бьефа;
_______________
* В зависимости от конструктивных особенностей шлюза это технологическое состояние может являться исходным. В исходном состоянии шлюз может находиться длительное время.
- вход вверх - технологическое состояние входа судна в камеру шлюза со стороны нижнего бьефа для шлюзования вверх. В камере уровень нижнего бьефа;
- вход вниз - технологическое состояние входа судна в камеру шлюза со стороны верхнего бьефа для шлюзования вниз. В камере уровень верхнего бьефа;
- шлюзование вверх - технологическое состояние, в котором производится перемещение судна из нижнего бьефа в верхний. Камера наполняется;
- шлюзование вниз - технологическое состояние, в котором производится перемещение судна из верхнего бьефа в нижний. Камера опорожняется;
- выход вверх - технологическое состояние выхода судна из камеры шлюза в верхний бьеф. В камере уровень верхнего бьефа;
- выход вниз - технологическое состояние выхода судна из камеры шлюза в нижний бьеф. В камере уровень нижнего бьефа;
- подготовка вверх - технологическое состояние, в котором производится подготовка камеры шлюза для приема судна со стороны нижнего бьефа для шлюзования вверх. Камера опорожняется;
- подготовка вниз - технологическое состояние, в котором производится подготовка камеры шлюза для приема судна со стороны верхнего бьефа для шлюзования вниз. Камера наполняется;
- холостое наполнение - технологическое состояние, в котором производится прием воды в камеру шлюза из верхнего бьефа. Камера наполняется;
- холостое опорожнение - технологическое состояние, в котором производится слив воды из камеры шлюза в нижний бьеф. Камера опорожняется.
3.1.13 исполнительный механизм: Совокупность механических или гидравлических устройств, обеспечивающая перемещение подвижных элементов шлюза - ворот, затворов, устройств защиты ворот от навала судов. В зависимости от конструкции для каждого подвижного элемента шлюза используют один или два, соответственно левый и правый исполнительные механизмы.
3.1.14 технологический электроприемник: Устройство, преобразующее электрическую энергию в механическую или световую. Технологические электроприемники обеспечивают работу исполнительных механизмов и светофорной сигнализации.
3.1.15 исполнительное устройство: Электронный или электромагнитный прибор, обеспечивающий в соответствии с полученными командами выдачу на технологический электроприемник силового электропитания с требуемыми уровнями напряжения и частоты.
3.1.16 силовая аппаратура: Конструктивно и функционально законченная совокупность устройств защитного отключения, коммутации и исполнительных устройств, а также вспомогательных приборов, обеспечивающая в соответствии с полученными командами выдачу на технологические электроприемники силового электропитания с требуемыми уровнями напряжения и частоты.
3.1.17 привод основных механизмов шлюза: Совокупность исполнительного устройства, технологического электроприемника и исполнительного механизма, обеспечивающая требуемое передвижение ворот, затворов, устройств защиты ворот от навала судов.
3.1.18 программируемый графический сенсорный терминал: Устройство, предназначенное для отображения по заданной программе графической, текстовой и цифровой информации, а также сенсорного приема управляющего воздействия оператора и передачи команд в сопряженное с ним программно-вычислительное средство.
3.1.19 промышленная сеть: Сеть передачи данных, связывающая программно-вычислительные средства, исполнительные устройства, датчики и различные интеллектуальные устройства и используемая в промышленной автоматизации.
3.1.20 среда передачи данных: Физическая среда, в которой передаются данные в виде электрических или световых сигналов.
3.1.21 топология сети: Набор правил для физического соединения узлов сети и организации взаимодействия сетевых устройств.
3.1.22 горячая замена: Замена части оборудования системы во время ее работы без полного выключения электропитания системы и останова технологического процесса.
3.1.23 мнемосхема: Графическая модель объекта управления, динамически отображающая его функционирование.
3.1.24 нештатная ситуация: Ситуация, при которой параметры технологического процесса или состояния оборудования выходят за рамки штатных (допустимых) значений.
3.1.25 детерминированная передача данных: Циклическая, гарантированная передача полного объема данных за заданное время.
3.2 Сокращения
АВР - автоматический ввод резерва;
АСУ ТП - автоматизированная система управления технологическим процессом;
АРМ - автоматизированное рабочее место;
ПВС - программно-вычислительное средство;
ПО - программное обеспечение;
ТПО - технологическое программное обеспечение;
СГТС - судоходное гидротехническое сооружение;
СУ - система управления;
ТЗ - техническое задание;
УСО - устройство удаленной связи с объектом;
ЦПУ - центральный пульт управления.
4 Требования к инженерно-техническому обеспечению СУ
4.1 Общие требования к структуре СУ
4.1.1 СУ должна проектироваться в виде резервированной системы, обеспечивающей технологическую безопасность судопропуска во всех, как штатных, так и аварийных, режимах функционирования, включая ситуации однократного отказа любого внутреннего элемента системы - блока управления, силового исполнительного устройства, технологического электроприемника, датчика, силовой кабельной линии или сегмента сети передачи данных.
4.1.2 Обязательным является резервирование технологических электроприемников аварийных ворот, совмещенных с эксплуатационными воротами. Если резервирование какого-либо элемента (устройства) невозможно в силу конструктивных особенностей места размещения указанного элемента, допускается установка этого элемента без резервирования, о чем должно быть принято соответствующее техническое решение Заказчиком системы.
4.1.3 СУ должна проектироваться в виде автоматизированной системы. Управление технологическим процессом и контроль за его состоянием должны осуществляться оператором с центрального пульта управления шлюза.
4.1.4 СУ должна проектироваться в виде децентрализованного программно-аппаратного комплекса с использованием современных вычислительных средств, имеющих модульную структуру с возможностью оперативной горячей замены любого вышедшего из строя модуля.
4.1.5 При проектировании СУ должно быть обеспечено непрерывное взаимодействие между ее вычислительными средствами путем использования промышленных сетевых решений, обеспечивающих детерминированные протоколы передачи данных.
4.1.6 На всех технологических уровнях при нарушении работы одного из участков СУ должно выполняться требование сохранения работоспособности всех остальных ее участков. При нарушении работы любого из участков СУ остальные участки должны произвести остановку оборудования в автономном режиме по предварительно заданным алгоритмам аварийного останова.
4.1.7 СУ должна проектироваться в виде функционально автономной системы, обеспечивающей технологический процесс судопропуска без получения управляющих команд от любых внешних систем.
4.1.8 Структура построения СУ и применяемые программно-аппаратные средства должны обеспечивать возможность информационного взаимодействия СУ с системами диспетчерского управления или другими внешними системами.
4.1.9 Применяемые при проектировании СУ аппаратные средства должны удовлетворять требованиям 1.4 ГОСТ 24.104, допускаются к применению только серийно выпускаемые датчики, модули, блоки и приборы.
4.2 Требования к функциональной структуре СУ
4.2.1 СУ должна иметь иерархическую функциональную структуру. В качестве основы для построения СУ необходимо использовать функционально многоуровневую модель СУ, содержащую как минимум три технологических уровня и один информационно-диагностический уровень:
- первый технологический уровень - уровень датчиков, измерительных приборов и исполнительных устройств;
- второй технологический уровень - уровень ПВС, выполняющий программы управления исполнительными механизмами шлюза;
- третий технологический уровень - уровень ПВС, выполняющий программу управления технологическим состоянием шлюза;
- четвертый, информационно-диагностический, уровень - уровень ПВС и аппаратных средств, выполняющий реализацию информационных и диагностических функций СУ.
4.2.2 Первый технологический уровень в части работы датчиков и измерительных средств должен обеспечивать:
- формирование достоверной информации о состоянии технологических параметров судопропуска;
- формирование достоверной информации о состоянии внутренних элементов СУ;
- выдачу информации об исправности датчиков и измерительных средств в ПВС второго уровня.
4.2.3 На первом технологическом уровне в части работы исполнительных устройств должны обеспечиваться:
- прием управляющих команд от ПВС второго уровня;
- коммутация силового напряжения;
- коммутация и преобразование параметров силового напряжения;
- выдача информации об исправности, готовности и состоянии исполнительных устройств в ПВС второго уровня.
4.2.4 На втором технологическом уровне должны выполняться следующие функции:
- прием сигналов от датчиков и измерительных приборов;
- выполнение программы управления исполнительными механизмами шлюза;
- контроль и анализ блокировок технологической безопасности;
- прием управляющих команд от ПВС третьего уровня;
- выдача управляющих команд на исполнительные устройства первого уровня;
- выдача информации на ПВС третьего уровня;
- организация работы местных пультов управления.
4.2.5 На втором технологическом уровне должны выполняться следующие функции местного управления:
- индикация состояния исполнительных механизмов;
- управление исполнительными устройствами в местном режиме.
4.2.6 На третьем технологическом уровне должны выполняться следующие функции:
- парольная аутентификация оператора;
- контроль действий оператора по управлению ходом технологического процесса судопропуска, в том числе предотвращение исполнения неверно сформированных оператором команд;
- прием информации от ПВС второго уровня;
- выполнение программы управления технологическим состоянием шлюза;
- контроль и анализ состояния блокировок технологической безопасности;
- организация виртуальной (программной) панели отключения технологических блокировок;
- выдача управляющих команд на ПВС второго уровня;
- контроль состояния, а также управление светофорной сигнализацией;
- прием сигналов от датчиков и измерительных средств, непосредственно не связанных с работой исполнительных механизмов шлюза;
- выдача управляющих команд на исполнительные устройства, непосредственно не связанных с работой исполнительных механизмов шлюза;
- поддержка информационного взаимодействия с аппаратурой четвертого уровня;
- формирование данных о состоянии технологических параметров судопропуска.
4.2.7 Управление технологическим процессом судопропуска должно производиться с центрального пульта управления, входящего в состав третьего технологического уровня.
4.2.8 Центральный пульт управления должен выполнять следующие функции:
- прием команд от оператора;
- визуализация хода технологического процесса судопропуска;
- визуализация технологического состояния шлюза;
- визуализация заданных режимов работы СУ;
- визуализация обобщенного состояния исправности и готовности аппаратуры СУ;
- визуализация работы исполнительных механизмов;
- индикация состояния и параметров работы исполнительных механизмов;
- индикация предупредительных и аварийных сообщений;
- индикация показаний датчиков и измерительных средств, непосредственно не связанных с работой исполнительных механизмов шлюза.
4.2.9 Третий технологический уровень должен содержать подсистему гарантированного электропитания, выполняющие следующие функции:
- гарантированное обеспечение электропитанием датчиков, ПВС второго и третьего технологических уровней, технологической аппаратуры центрального пульта управления в условиях отсутствия внешнего электроснабжения шлюза;
- распределение гарантированного электропитания потребителям;
- измерение параметров внешнего электроснабжения шлюза;
- измерение параметров суммарного электропотребления технологическим оборудованием;
- выдача значений измеренных параметров на четвертый уровень.
4.2.10 На четвертом, информационно-диагностическом, уровне должны выполняться следующие функции:
- организация иерархического парольного доступа к настройкам СУ;
- хранение и модификация списка пользователей и их актуальных паролей;
- организация информационного взаимодействия с ПВС третьего уровня;
- расширенная иерархическая визуализация исправности и готовности к работе аппаратуры СУ;
- организация расширенной виртуальной (программной) панели отключения технологических блокировок;
- автоматизированное заполнение вахтенного журнала;
- настройка параметров СУ;
- диагностика аппаратуры СУ;
- косвенная диагностика исполнительных механизмов;
- организация архивов событий и действий оператора;
- организация архивов мониторинга работы СУ;
- организация архивов мониторинга технологических электроприемников;
- организация архивов мониторинга конструктивных параметров шлюза;
- технологическое видеонаблюдение;
- архивирование видеоинформации;
- информационное взаимодействие с внешними системами;
- обеспечение защиты технологических уровней СУ от внешних программных и "вирусных" угроз;
- обеспечение программно-аппаратного барьера между внутренней и внешней локальными вычислительными сетями.
4.2.11 Первые три технологических уровня СУ должны обеспечивать полный цикл штатного процесса судопропуска без какого-либо воздействия со стороны четвертого функционального уровня.
4.2.12 Управляющее воздействие аппаратуры четвертого функционального уровня на технологические уровни СУ допускается только в случаях модификации списка пользователей, изменения паролей, настройки параметров СУ, проведения регламентных, ремонтно-восстановительных, специальных работ и при возникновении нештатных ситуаций.
4.2.13 При построении СУ должно быть обеспечено резервирование аппаратных средств первых трех технологических уровней.
4.2.14 На аппаратуру третьего уровня, не относящуюся к управлению исполнительными механизмами шлюза, не распространяется требование сохранения работоспособности при однократной неисправности.
4.2.15 Требования по необходимости резервирования аппаратных средств четвертого уровня СУ предъявляются в частном техническом задании на разработку СУ конкретного шлюза.
4.2.16 Требования по необходимости электропитания аппаратных средств четвертого уровня СУ от подсистемы гарантированного электропитания предъявляются в частном техническом задании на разработку СУ конкретного шлюза.
4.2.17 Возможность маневрирования воротами, затворами и другими механизмами шлюза для проведения наладочных и ремонтных работ должна обеспечиваться средствами первого технологического уровня и минимально необходимой частью ПВС второго технологического уровня при использовании специального ключа без какого-либо воздействия со стороны других уровней.
4.3 Требования к структуре размещения оборудования СУ
4.3.1 Конструктивно оборудование первого и второго уровней СУ рекомендуется разделить на несколько блоков, каждый из которых обеспечивает работу одного функционально законченного технологического узла. Блоки оборудования первого и второго уровней СУ рекомендуется размещать на шлюзе с учетом территориального расположения управляемых ими технологических узлов.
4.3.2 Выбор мест установки датчиков должен осуществляться с доступной минимизацией погрешностей производимых ими измерений.
4.3.3 При выборе мест для установки основного и резервного датчиков рекомендуется их пространственное разнесение с целью исключения случаев одновременного механического повреждения.
4.3.4 Рекомендуется выбирать место и способ установки основного и резервного датчиков с учетом обеспечения независимой работоспособности любого из датчиков в ситуациях технического обслуживания или замены любого из них.
4.3.5 Программно-вычислительные средства и силовая аппаратура должны размещаться в электротехнических шкафах.
4.3.6 Распределение силового оборудования СУ по электротехническим шкафам должно осуществляться с учетом функциональной законченности конструктивных элементов, т.е. отдельный электротехнический шкаф должен содержать весь функциональный набор аппаратуры для управления электроприемниками конкретного исполнительного механизма.
4.3.7 Совмещение основного и резервного комплектов силовой аппаратуры в одном электротехническом шкафу допускается при мощности обслуживаемых электроприемников менее 10 кВт.
4.3.8 Не допускается совмещенное расположение в одном электротехническом шкафу программно-вычислительных средств и силовой аппаратуры.
4.3.9 При групповом размещении шкафов силовой аппаратуры в составе сборки шкафов необходимо предусматривать единый групповой шкаф для ввода и распределения электропитания по шкафам сборки.
4.3.10 Шкафы, сборки шкафов силовой аппаратуры должны располагаться в помещениях устоев на высотных отметках, не подвергаемых затоплению как при сезонном изменении уровня воды, так и в аварийных ситуациях.
4.3.11 Шкафы силовой аппаратуры должны располагаться по возможности на минимальном расстоянии от соответствующих технологических электроприемников.
4.3.12 При наличии у подвижного элемента шлюза двух исполнительных механизмов, левого и правого, рекомендуется обеспечивать равную длину силовых кабелей от левого и правого шкафов силовой аппаратуры до соответствующих технологических электроприемников.
4.3.13 Шкафы с ПВС второго технологического уровня, выполняющими программы управления движением исполнительных механизмов, необходимо располагать в устоях, в которых расположены эти механизмы.
4.3.14 При наличии у подвижного элемента шлюза двух исполнительных механизмов, левого и правого, допускается применение одного ПВС, выполняющего программы управления движением левого и правого исполнительных механизмов.
4.3.15 При размещении шкафов с ПВС второго технологического уровня допускается их совмещенное расположение со сборками шкафов силовой аппаратуры.
4.3.16 Рекомендуется размещать шкафы с аппаратурой первого и второго уровней в устоях шлюза в виде сборки шкафов с единым групповым шкафом для ввода и распределения всех типов электропитания по шкафам сборки.
4.3.17 Шкафы с ПВС третьего и четвертого технологических уровней, подсистемы гарантированного электропитания и центральной части аппаратных средств четвертого уровня должны располагаться в устое, содержащем помещение ЦПУ, на высотных отметках, не подвергаемых затоплению как при сезонном изменении уровня воды, так и в аварийных ситуациях.
4.3.18 Допускается размещение ПВС информационно-диагностического уровня в конструкции центрального пульта управления СУ.
4.3.19 В конструкции центрального пульта управления должно быть размещено оборудование, обеспечивающее:
- прием команд от оператора;
- визуализацию хода технологического процесса судопропуска, заданных режимов работы и обобщенного состояния СУ;
- приоритетный ввод команды на закрытие аварийных ворот;
- приоритетный ввод команды на останов исполнительных механизмов;
- звуковое и световое оповещение оператора в аварийных и нештатных ситуациях;
- визуализацию видеоинформации системы технологического видеонаблюдения;
- визуализацию информации и взаимодействие с ПВС информационно-диагностического уровня.
4.3.20 Шкафы СУ рекомендуется размещать на территории шлюза таким образом, чтобы не мешать проведению регламентных работ, связанных с механизмами шлюза.
4.4 Требования к структуре управляющих и информационных связей
4.4.1 Взаимодействие между аппаратными средствами технологических уровней СУ должно быть организовано с использованием промышленных сетевых решений, обеспечивающих детерминированную передачу данных.
4.4.2 Допускается применение промышленных сетевых решений, удовлетворяющих требованиям стандарта МЭК 61158.
4.4.3 Сети передачи данных между аппаратными средствами технологических уровней СУ должны быть резервированными.
4.4.4 При проектировании сетевой структуры взаимодействия ПВС второго технологического уровня и датчиков (сеть датчиков) допускается применение сетевого оборудования с шинной или древовидной топологией соединения узлов сети.
4.4.5 Основные и резервные датчики должны быть включены соответственно в основную и резервную сети. Не допускается объединение кабельных линий основной и резервной сетей.
4.4.6 При проектировании сетевой структуры взаимодействия ПВС второго технологического уровня и силовой аппаратуры (сеть силовой аппаратуры) допускается применение сетевого оборудования с шинной или древовидной топологией соединения узлов сети.
4.4.7 Основная и резервная силовая аппаратура должна быть включена соответственно в основную и резервную сети. Не допускается объединение кабельных линий основной и резервной сетей.
4.4.8 Не допускается объединение сетей датчиков и сетей силовой аппаратуры.
4.4.9 Прокладку кабелей основной и резервной сетей необходимо осуществлять различными трассами, при совмещении трасс должны быть приняты меры по дополнительной индивидуальной защите кабелей.
4.4.10 Для сетей датчиков и сетей силовой аппаратуры в качестве среды передачи данных допускается применение соответствующих медных кабелей.
4.4.11 Если имеется единая сеть датчиков или силовой аппаратуры для левого и правого устоев, то переход сети через камеру шлюза рекомендуется выполнять оптоволоконным кабелем.
4.4.12 При нарушении работоспособности любого из элементов сети датчиков или сети силовой аппаратуры должен быть осуществлен переход на работу соответствующей резервной сети.
4.4.13 При проектировании сетевой структуры взаимодействия ПВС третьего технологического уровня и ПВС второго технологического уровня (сеть ПВС) рекомендуется применять сетевое оборудование с кольцевой топологией соединения узлов сети ПВС. Допускается применение сетевого оборудования с резервированной шинной или резервированной древовидной топологией соединения узлов сети ПВС.
4.4.14 Все ПВС должны быть оснащены двумя интерфейсными модулями подключения к сети ПВС.
4.4.15 При нарушении работоспособности любого из элементов сети ПВС должен сохраняться сетевой обмен данными между всеми узлами сети ПВС.
4.4.16 Прокладку кабелей сегментов кольцевой сети ПВС необходимо осуществлять различными трассами. При выборе трасс прокладки кабелей сегментов рекомендуется исключить возможные случаи одновременного повреждения двух любых сегментов сети ПВС.
4.4.17 При использовании сетевого оборудования с резервированной шинной или резервированной древовидной топологией соединения узлов сети ПВС прокладку кабелей основной и резервной ветвей сети ПВС необходимо осуществлять различными трассами. При выборе трасс прокладки кабелей ветвей рекомендуется исключить возможные случаи одновременного повреждения основной и резервной ветвей сети ПВС.
4.4.18 В качестве среды передачи данных в сети ПВС должен использоваться оптоволоконный кабель.
4.4.19 Допускается использование различных жил общего оптоволоконного кабеля для передачи данных различных сетей технологических функциональных уровней.
4.4.20 При проектировании сетевой структуры взаимодействия оборудования информационно-диагностического уровня и ПВС третьего технологического уровня (информационная сеть) допускается применение сетевого оборудования с шинной или древовидной топологией соединения узлов сети.
4.4.21 Требования по необходимости резервирования аппаратных средств информационной сети предъявляются в частном техническом задании на разработку СУ конкретного шлюза.
4.5 Требования к датчикам технологического процесса
4.5.1 Для каждого исполнительного механизма должны быть предусмотрены датчики технологического состояния механизма, обеспечивающие получение СУ следующей информации:
- текущее положение механизма;
- достижение механизмом предельного аварийного положения открытия или закрытия;
- текущая нагрузка на механизм.
4.5.2 Датчики текущего положения механизма должны измерять положения механизма в диапазоне физически возможного его перемещения.
4.5.3 Датчики текущего положения механизма должны иметь однозначную зависимость выходного сигнала от измеряемой величины во всем диапазоне возможного перемещения механизма.
4.5.4 Нулевое значение шкалы измерения датчиков текущего положения должно физически соответствовать крайнему возможному открытому (закрытому) положению механизма.
4.5.5 Предельные рабочие и все необходимые промежуточные положения механизма СУ должна вычислять путем обработки сигнала от датчика текущего положения механизма.
4.5.6 Не допускается совмещать в одном устройстве функции датчиков текущего положения и предельных аварийных положений механизма.
4.5.7 Датчики предельных аварийных положений механизма должны быть контактного типа, контактная группа датчика при достижении механизмом предельного аварийного положения должна работать на размыкание.
4.5.8 Датчики текущего положения механизма должны выдавать абсолютное значение измеряемой величины, т.е. при включении электропитания датчик должен показывать величину реального значения положения механизма, даже если происходило перемещение механизма во время отключения питания датчика.
4.5.9 Ошибка датчика текущего положения механизма, приведенная к положению перемещаемой конструкции, не должна превышать:
- для механизмов, обеспечивающих поступательное движение, - 0,5 мм;
- для механизмов, обеспечивающих вращательное движение, - 200 угловых секунд.
4.5.10 Датчик текущей нагрузки на механизм должен обеспечивать косвенное измерение величины и направления усилий (сжатие и растяжение, натяжение и ослабление) в тяговом органе, непосредственно взаимодействующем с перемещаемой конструкцией.
4.5.11 Не допускается использование датчика текущей нагрузки на механизм как части силовой конструкции тягового органа.
4.5.12 Пределы допустимых усилий должны задаваться в настройках СУ и сравниваться с сигналом от датчика текущей нагрузки на механизм.
4.5.13 Измерение уровня воды в бьефах и камерах шлюза должно осуществляться в водомерных колодцах.
4.5.14 Датчики уровня воды в бьефах и камерах должны обеспечивать измерение уровня с погрешностью не более 20 мм во всем диапазоне возможного изменения уровня воды.
4.5.15 Не рекомендуется применение датчиков, требующих для своей работы непосредственного контакта корпуса чувствительного элемента или сигнальной кабельной линии с водой.
4.5.16 Датчики контроля положения судна должны работать по принципу пересечения луча и исключать ложное срабатывание во всем диапазоне погодных условий.
4.5.17 При проектировании СУ рекомендуется использовать датчики, обладающие следующими свойствами:
- внутренняя цифровая обработка сигнала чувствительного элемента датчика;
- непосредственная поддержка интерфейса сети датчиков;
- наличие встроенной системы диагностики или возможности дистанционной диагностики;
- возможность настройки датчика через интерфейс сети датчиков;
- наличие индикатора работоспособного состояния.
4.5.18 Рекомендуется применять измерительные датчики с напряжением питания 24 В постоянного тока, контактные группы датчиков аварийных крайних положений механизмов должны быть запитаны напряжением 220 В переменного тока.
4.5.19 При проектировании СУ рекомендуется использовать минимально возможную номенклатуру датчиков.
4.5.20 Применяемые датчики должны устойчиво работать в условиях наличия электромагнитных помех.
4.6 Требования к организации диагностики аппаратных средств СУ
4.6.1 Должен быть обеспечен уровень диагностики аппаратных средств технологической части СУ, достаточный для идентификации неисправности с центрального пульта управления.
4.6.2 Диагностика аппаратных средств должна быть непрерывной в независимости от использования диагностируемого элемента в процессе выполнения технологических операций.
4.6.3 Задачи по диагностированию аппаратных средств должны быть распределены между ПВС по принципу функциональной подчиненности.
4.6.4 Результаты диагностики должны входить в логические цепи сигналов "Готовность" и "Исправность", факт выявления неисправности аппаратного средства должен фиксироваться в архиве неисправностей на информационно-диагностическом уровне системы.
4.6.5 На ЦПУ должно быть организовано непрерывное отображение состояния обобщенного сигнала готовности, неисправности аппаратных средств должны отображаться на информационно-диагностическом уровне в виде мнемосхемы неисправностей, содержащей как минимум следующие уровни:
- система в целом с указанием неисправной сборки шкафов;
- сборка шкафов с указанием неисправного шкафа;
- шкаф с указанием списка сигналов неисправностей.
4.6.6 Диагностика аппаратных средств должна осуществляться за счет:
- контроля состояния элемента;
- контроля срабатывания элемента;
- контроля последовательности срабатывания элементов;
- контроля факта изменения физической величины, вызванного формированием команды управления;
- контроля факта выхода измеряемой (физической) величины за границы диапазона физически возможного изменения;
- контроля факта выхода скорости измеряемой (физической) величины за границы диапазона физически возможного изменения скорости;
- контроля факта выхода сигнала датчика за границы диапазона работоспособности;
- контроля непрерывности в изменениях сигнала датчика;
- контроля результата процесса самодиагностики интеллектуальных приборов;
- контроля результатов диагностики интеллектуальным прибором подключенного к нему электроприемника;
- контроля непрерывности процесса передачи данных в сети любого уровня;
- контроля параметров электропитания.
4.6.7 По факту срабатывания дополнительных сигнальных контактов устройств должны диагностироваться следующие состояния неисправности устройств автоматического выключения и исполнительных устройств:
- устройство автоматического выключения отключено вручную;
- устройство автоматического выключения сработало по превышению тока уставки;
- исполнительное устройство включилось самопроизвольно;
- исполнительное устройство не включилось.
4.6.8 В конструкции применяемых аппаратных средств должна быть предусмотрена световая или иная индикация факта наличия напряжения питания, срабатывания входов/выходов, наличия неисправностей в работе, неработоспособного состояния.
4.7 Требования к организации дистанционного мониторинга
4.7.1 ПВС информационно-диагностического уровня должны выполнять функцию программно-аппаратного барьера между внутренней и внешней локальными вычислительными сетями.
4.7.2 При проектировании информационно-диагностического уровня должна быть обеспечена возможность дистанционного мониторинга СУ в части:
- определения работоспособного состояния СУ;
- определения технологического состояния шлюза;
- определения уровней воды в верхнем и нижнем бьефах;
- чтения архивов событий;
- чтения архивов внутреннего мониторинга;
- чтения архивов видеоинформации.
4.7.3 При проектировании информационно-диагностического уровня должна быть обеспечена возможность дистанционной передачи в СУ следующей информации:
- местоположение судов при подходах к шлюзу;
- производственное задание оператору;
- метеорологическая обстановка.
4.7.4 На программно-аппаратном уровне должна быть исключена возможность передачи из внешних систем в аппаратуру технологических уровней управляющих воздействий.
4.8 Требования к подсистеме технологического видеонаблюдения
4.8.1 При проектировании подсистемы технологического видеонаблюдения необходимо обеспечить для оператора хорошую видимость камер шлюза, ворот и причальных стенок верхнего и нижнего бьефов.
4.8.2 Подсистема технологического видеонаблюдения должна обеспечивать непрерывное одновременное архивирование видеоинформации от всех установленных видеокамер.
4.8.3 Запись видеоинформации должна осуществляться в цифровом формате.
4.8.4 Глубина архива по времени должна составлять не менее 7 суток.
4.8.5 Организация процесса записи архива должна обеспечивать автоматическое, без вмешательства оператора, удаление устаревшей видеоинформации.
4.8.6 Применяемые видеокамеры должны обеспечивать хорошую видимость в условиях естественного и искусственного освещения шлюза. Чувствительность видеокамер должна исключать необходимость применения специальных устройств подсветки.
4.8.7 Применяемые видеокамеры должны обеспечивать цветное изображение, в темное время суток допускается переключение в режим черно-белого изображения.
4.8.8 Видеокамеры должны устанавливаться в защитных кожухах, обеспечивающих их работоспособность в условиях внешних климатических воздействий.
4.8.9 Обзор каждой камеры шлюза должен осуществляться минимум двумя видеокамерами, расположенными на противоположных головах шлюза.
4.8.10 Видеокамеры обзора зоны ворот должны обеспечивать возможность визуального контроля оператором процесса и правильности створения ворот.
4.8.11 Места установки и углы обзора видеокамер должны быть выбраны с условием возможности видеоконтроля оператором за всеми стадиями процесса судопропуска. Не допускается применение основных управляемых поворотных видеокамер.
4.8.12 Допускается применение дополнительных управляемых поворотных видеокамер при условии сохранения визуального контроля оператором за процессом судопропуска и регистрации видеоданных от основных видеокамер.
4.8.13 Представленная видеоинформация на центральном пульте должна обеспечивать одновременное наблюдение за изображениями от всех видеокамер на экране одного дисплея за счет разделения экрана на поля вывода изображений по сетке 3x3 или 4x4.
4.8.14 Должна обеспечиваться возможность выбора и увеличения изображения любой видеокамеры на полный экран дисплея.
4.8.15 При количестве видеокамер в системе более 6 должна быть обеспечена постоянная привязка изображения каждой видеокамеры к соответствующему полю вывода изображения.
4.8.16 Управление процессом выбора, увеличения, уменьшения изображения должно осуществляться за счет обработки сенсорного воздействия оператора на поле изображения требуемой видеокамеры. Допускается применение специализированных клавиатур для управления процессом выбора, увеличения, уменьшения изображения видеокамер.
4.9 Требования к структуре электроснабжения СУ
4.9.1 Электроснабжение шлюза должно осуществляться в соответствии с требованиями, установленными для потребителей категории I [2].
4.9.2 По низкой стороне основной и резервный понижающие трансформаторы должны иметь схему АВР и центральный щит распределения электроснабжения технологических и общехозяйственных нужд.
4.9.3 Режим работы нейтрали в сетях низкого напряжения - глухозаземленная нейтраль на выходе понижающего трансформатора, подключение потребителей должно осуществляться по системе TN-S или TN-C-S в соответствии с требованиями ГОСТ Р 50571.3.
4.9.4 Электропитание сборок шкафов силовой аппаратуры и подсистемы гарантированного электропитания должно осуществляться от трехфазной сети переменного тока напряжением 380 В.
4.9.5 Электропитание шкафов ПВС технологических уровней и технологической аппаратуры ЦПУ должно осуществляться от дублированной подсистемы гарантированного электропитания, обеспечивающей бесперебойное электропитание этой аппаратуры в течение 10 мин в условиях отсутствия внешнего электроснабжения шлюза.
4.9.6 Электропитание шкафов ПВС технологических уровней должно осуществляться от однофазной сети переменного тока напряжением 220 В.
4.9.7 Сборки шкафов силовой аппаратуры, управляющие работой механизмов, обеспечивающих движение аварийных ворот, должны иметь коммутационную аппаратуру для подключения к источнику аварийного электроснабжения.
4.9.8 Источник аварийного электроснабжения должен размещаться на территории верхней головы, на той стороне шлюза, на которой находится помещение ЦПУ.
4.9.9 Должны быть предусмотрены автоматический и ручной режимы управления работой источника аварийного электроснабжения и коммутационной аппаратурой его подключения. Порядок действий по управлению работой источника аварийного электроснабжения должен задаваться в частном техническом задании на разработку СУ конкретного шлюза.
4.9.10 Тип, мощность и время непрерывной работы источника аварийного электроснабжения должны задаваться в частном техническом задании на разработку СУ конкретного шлюза, при этом время непрерывной работы источника аварийного электроснабжения должно гарантировать закрытие аварийных ворот на номинальной скорости.
4.9.11 Кабельные сети электропитания сборок шкафов силовой аппаратуры должны быть выполнены для каждой сборки шкафов в виде индивидуального кабеля, подключенного к центральному щиту распределения электроснабжения технологических нужд. Между центральным щитом распределения электроснабжения технологических нужд и устоями голов шлюза должны быть проложены резервные силовые кабели.
4.9.12 Кабельные сети электропитания шкафов ПВС должны быть выполнены для каждого шкафа ПВС в виде пары кабелей, основного и резервного, подключенных к дублированной подсистеме гарантированного электропитания.
4.9.13 Защитное заземление аппаратуры СУ должно быть выполнено в соответствии с требованиями ГОСТ 12.1.030 и ГОСТ Р 50571.3. В качестве заземляющего устройства допускается использовать естественный заземлитель.
4.9.14 На территории шлюза, в соответствии с ГОСТ Р 50571.3, должна быть выполнена система уравнивания потенциалов.
4.9.15 Силовая аппаратура СУ и подсистема гарантированного электропитания должны устойчиво функционировать при следующих параметрах внешнего электроснабжения:
- напряжение питающей сети - 380 В![]() ;
;
- частота питающей сети - 50 Гц.
5 Требования к организации пультов управления СУ
5.1 Требования к организации центрального пульта управления
5.1.1 Управление технологическим процессом судопропуска должно осуществляться с центрального пульта управления СУ.
5.1.2 В состав ЦПУ должны входить следующие аппаратные средства третьего технологического уровня:
- цветные графические сенсорные устройства отображения и ввода информации - терминалы;
- аппаратные органы управления;
- технологическая сирена;
- двухцветная аварийная световая сигнализация.
5.1.3 В состав ЦПУ должно входить как минимум два терминала, при выходе из строя одного из них, второй терминал должен обеспечить выполнение всех функций, связанных с осуществлением технологического процесса судопропуска.
5.1.4 Терминалы, входящие в состав ЦПУ, должны иметь индивидуальные каналы связи с ПВС третьего уровня.
5.1.5 Терминалы должны обеспечивать человеко-машинный интерфейс оператора и системы управления (интерфейс) за счет:
- непрерывного отображения мнемосхемы;
- непрерывного отображения зоны сенсорной панели команд;
- непрерывного опроса состояния сенсорных элементов мнемосхемы.
5.1.6 Ориентация мнемосхемы на терминале должна быть удобной для восприятия оператором с учетом положения ЦПУ относительно камеры шлюза.
5.1.7 Мнемосхема должна содержать следующие статические и динамические изображения, поля индикации, сенсорные органы управления и вызова окон информации:
- графическую модель шлюза;
- графические сенсорные модели ворот, затворов и заградительных устройств;
- области водной поверхности;
- схематичные сенсорные модели светофоров;
- графическую модель условного судна;
- зону сенсорной панели команд;
- сенсорное текстовое поле индикации и выбора режима процесса судопропуска;
- сенсорное текстовое поле индикации технологического состояния процесса судопропуска;
- сенсорное числовое поле индикации характеристик шлюзуемого судна;
- индикаторы обобщенного сигнала готовности СУ по головам шлюза;
- числовые поля индикации уровней воды и напоров на головы шлюза;
- зону для сенсорной пиктограммы вызова окна предупредительной сигнализации;
- сенсорную пиктограмму вызова виртуальной панели отключения сработавших блокировок;
- сенсорную пиктограмму вызова информации о метеорологических условиях;
- сенсорную пиктограмму вызова информации о параметрах электроснабжения;
- сенсорную пиктограмму вызова окна регистрации пользователя;
- поле текущего значения времени.
5.1.8 Не допускается вывод на терминалы информации, не связанной с технологией управления процессом судопропуска.
5.1.9 Интерфейс должен обеспечивать непрерывное информирование оператора о текущем состоянии технологического процесса судопропуска за счет:
- анимации моделей;
- вывода текстовой информации на поля индикации;
- вывода числовых значений на поля индикации;
- изменения цвета индикаторов;
- автоматического вывода полей и окон с дополнительной информацией;
- автоматического вывода предупредительных полей с информацией о неверно сформированных оператором командах;
- звукового оповещения.
5.1.10 Интерфейс должен обеспечивать автоматический вывод на терминал следующих окон и полей:
- окна аварийной сигнализации;
- окна предупредительной сигнализации;
- окна информации о неблагоприятных метеорологических условиях.
5.1.11 Интерфейс должен поддерживать следующие непосредственно вызываемые окна дополнительной информации:
- окно индикации процесса маневрирования исполнительными механизмами;
- окно информации о метеорологических условиях;
- окно информации о параметрах электроснабжения;
- окно состояния предупредительной сигнализации.
5.1.12 Интерфейс должен обеспечивать непрерывную возможность ввода оператором:
- режима управления;
- технологического задания;
- характеристик шлюзуемого судна и перевозимого судном груза;
- подтверждений на запросы системы;
- команд на выполнение технологических операций;
- команд на останов технологических операций.
5.1.13 Интерфейс должен обеспечивать выбор следующих режимов управления процессом судопропуска:
- режим автоматического управления, в этом режиме должно быть обеспечено квитирование завершения следующих фаз технологического процесса: вход вверх (вниз), выход вверх (вниз);
- режим циклового управления, в этом режиме должно быть обеспечено квитирование начала каждой операции управления механизмами;
- режим раздельного управления, в этом режиме должно быть обеспечено квитирование выбора и начала каждой операции управления механизмами;
- режим специального управления.
5.1.14 Интерфейс в режиме специального управления должен обеспечивать:
- возможность работы с виртуальной панелью отключения сработавших блокировок;
- возможность выдачи разрешения на управление исполнительными устройствами механизма от местных пультов управления головы.
5.1.15 При выборе режима специального управления должна быть проведена процедура проверки уровня доступа оператора. Работа в режиме специального управления должна разрешаться операторам, имеющим второй уровень доступа.
5.1.16 В режимах циклового и раздельного управления квитирование операций должно осуществляться путем нажатия аппаратной кнопки "ПУСК".
5.1.17 Интерфейс в каждом режиме управления должен обеспечивать визуализацию индивидуального набора команд в зоне сенсорной панели команд, соответствующих режиму управления и технологическому состоянию.
5.1.18 Исполнение заданных оператором на терминале команд должно начинаться после нажатия аппаратной кнопки "ПУСК".
5.1.19 В составе аппаратных органов управления на панели ЦПУ должны быть предусмотрены следующие кнопки: "ПУСК", "СТОП", "СТОП ЦЕНТРАЛЬНЫЙ", "АВАРИЙНОЕ ЗАКРЫТИЕ".
5.1.20 Кнопка "ПУСК" должна включать реле центрального управления, которое должно коммутировать цепи управления исполнительных устройств. Кнопка должна быть зеленого цвета, без фиксации, иметь встроенную подсветку. Включение подсветки должно означать возможность и готовность системы выполнить заданные действия.
5.1.21 Кнопка "СТОП" должна отключать реле центрального управления. Кнопка должна быть красного цвета, без фиксации.
5.1.22 Кнопка "СТОП ЦЕНТРАЛЬНЫЙ" должна формировать сигнал на отключение силового питания всех исполнительных устройств механизмов. Воздействие на эту кнопку должно приводить к отключению силового питания всех исполнительных устройств механизмов независимо от режима работы СУ и состояния ПВС. Кнопка должна быть красного цвета, иметь выступающий толкатель увеличенного размера, фиксироваться в нажатом состоянии.
5.1.23 Кнопка "АВАРИЙНОЕ ЗАКРЫТИЕ" должна формировать сигнал в ПВС третьего технологического уровня. ПВС третьего уровня должны первоочередно выполнить подпрограмму аварийного закрытия, подпрограмма аварийного закрытия должна иметь наивысший приоритет. Кнопка должна быть красного цвета, без фиксации. В конструкции кнопки должна быть предусмотрена механическая защита от случайного нажатия.
5.1.24 Технологическая сирена должна срабатывать в случае возникновения ситуаций, которые могут привести к останову технологического процесса судопропуска, а также в аварийных ситуациях.
5.1.25 Мощность и тональность звука технологической сирены должны обеспечивать отчетливую слышимость для оператора звука сирены при его нахождении в любом из помещений, посещение которых допускается в период несения вахты.
5.1.26 В состав двухцветной аварийной световой сигнализации должны входить зеленый и красный цветовые блоки. Постоянное свечение зеленого блока должно означать отсутствие нештатных ситуаций в работе СУ и процессе судопропуска. Мигание или постоянное свечение красного блока должно соответствовать наличию нештатных ситуаций в работе СУ или в технологическом процессе судопропуска.
5.1.27 Аварийная световая сигнализация должна быть видна из любой точки помещения ЦПУ.
5.1.28 В состав ЦПУ должны входить следующие аппаратные средства четвертого, информационно-диагностического, уровня:
- дисплей АРМ инженера;
- клавиатура и манипулятор типа "мышь" АРМ инженера;
- дисплей системы технологического видеонаблюдения;
- микрофон записи переговоров между оператором и судоводителем.
5.1.29 Конструкция ЦПУ должна обеспечивать возможность выполнения оператором всех операций, связанных с управлением технологическим процессом судопропуска, из положения сидя.
5.1.30 ЦПУ должен быть размещен в помещении диспетчерской шлюза таким образом, чтобы солнечные блики не оказывали влияния на восприятие информации оператором.
5.1.31 Количество видеокамер системы технологического видеонаблюдения и их расположение на шлюзе должно обеспечивать достаточную видимость для контроля процесса судопропуска.
5.1.32 Расположение устройств отображения информации и органов управления на ЦПУ должно соответствовать требованиям промышленной эргономики по ГОСТ 23000.
5.1.33 Мнемосхемы, выводимые на экраны терминалов и дисплеев ЦПУ, должны быть выполнены в соответствии с требованиями ГОСТ 21480.
5.1.34 Цветовое решение мнемосхемы должно однозначно определять открытое, закрытое и промежуточное состояния ворот, а также текущее направление движения на открытие и на закрытие.
5.1.35 Конструкция ЦПУ должна обеспечивать возможность размещения на рабочей поверхности штатных средств оперативной диспетчерской связи и рабочей документации.
5.1.36 В конструкции ЦПУ должны быть предусмотрены выдвижные ящики для хранения штатного комплекта документации.
5.2 Требования к организации местных пультов управления
5.2.1 При проектировании СУ должны быть предусмотрены местные пульты управления исполнительными устройствами для каждого механизма.
5.2.2 Местные пульты должны быть снабжены органами управления, необходимыми для перемещения исполнительных механизмов во время ремонта, а также во время проведения работ, связанных с устранением нештатных ситуаций.
5.2.3 Местные пульты управления необходимо размещать в непосредственной близости от исполнительных механизмов.
5.2.4 В состав местных пультов должны входить следующие органы управления:
- кнопки и переключатели, обеспечивающие выдачу всех команд, необходимых для перемещения и останова исполнительного механизма;
- кнопка "СТОП", формирующая сигнал на аварийное отключение силового питания всех технологических электроприемников шлюза. Кнопка должна быть красного цвета, иметь выступающий толкатель увеличенного размера, фиксироваться в нажатом состоянии;
- поворотный переключатель "одна/две" стороны, формирующий сигнал, при наличии которого СУ выполняет команды оператора, работающего на местном пульте, отдельно (одна сторона) либо синхронно (две стороны) для смежных исполнительных устройств.
5.2.5 Сигналы органов управления местных пультов должны обрабатывать ПВС второго уровня, команды которых должны поступать на исполнительное устройство механизма, соответствующего задействованному местному пульту.
5.2.6 Сенсорные графические терминалы пультов управления второго уровня СУ рекомендуется размещать на лицевых панелях шкафов ПВС второго технологического уровня.
5.2.7 При управлении с пультов второго уровня рекомендуется обеспечивать следующие режимы работы:
- режим местного пульта управления. В этом режиме, помимо исполнения функций кнопочного местного пульта управления, должно быть предусмотрено выполнение функции перемещения исполнительного механизма на предварительно заданное расстояние с предварительно заданной скоростью;
- режим отображения параметров. В этом режиме оператор должен иметь возможность просматривать технологические параметры работы исполнительных механизмов;
- режим отображения диагностической информации. В этом режиме оператор должен иметь возможность просматривать протоколы аварийных и предупредительных сообщений.
5.2.8 Требования по применению пультов управления второго уровня, их резервированию и реализуемым режимам работы предъявляются в частном техническом задании на разработку СУ конкретного шлюза.
6 Требования к приводам основных механизмов шлюза
6.1 Общие требования к приводам
6.1.1 Приводы основных механизмов шлюза должны при всех допустимых значениях внешних возмущений обеспечивать плавное и безударное движение ворот и затворов.
6.1.2 Привод должен выполнять заданную тахограмму движения ворот и затворов. Тахограмма должна быть задана в частном ТЗ на разработку СУ конкретного шлюза.
6.1.3 Тахограмма по возможности должна быть сформирована так, чтобы во всех эксплуатационных режимах обеспечивалось ограничение ускорения при перемещении ворот и затворов. При применении электромеханического привода величину ограничения рекомендуется задавать в ТЗ в виде отношения максимально допустимого тока в обмотке электродвигателя к номинальному току. При применении электрогидравлического привода величину ограничения ускорения рекомендуется задавать в единицах ускорения.
6.1.4 Статическая ошибка привода, приведенная к положению ворот и затворов, не должна превышать заданного в ТЗ значения.
6.1.5 Не допускается перерегулирование по положению ворот и затворов.
6.1.6 При необходимости выполнения одновременного перемещения двух сторон ворот соответствующие приводы должны обеспечивать синхронность перемещений этих сторон, в пределах заданной в ТЗ точности, как в динамических, так и в статических режимах.
6.1.7 При необходимости выполнения одновременного перемещения двух составных частей ворот соответствующие приводы должны обеспечивать выполнение заданных ТЗ тахограмм движения каждой из указанных частей (створок), в пределах заданной в ТЗ точности, как в динамических, так и в статических режимах.
6.1.8 Во всех штатных режимах наложение и снятие тормозов на валы электродвигателей приводов должно осуществляться при нулевой скорости вращения вала.
6.2 Требования к электродвигателям приводов
6.2.1 Выбор параметров электродвигателей должен осуществляться при проектировании и расчете силовой механической части приводов в случае применения электромеханического привода, при применении электрогидравлического привода - при проектировании и расчете силовой гидравлической части с выбором соответствующей типу проектируемого привода маслонапорной установки.
6.2.2 В случае применения электромеханического привода или электрогидравлического привода, регулирование которого осуществляется частотным способом, конструкция электродвигателя должна обеспечивать его нормальную работу под управлением исполнительного устройства, позволяющего изменять как величину напряжения питания электродвигателя, так и частоту этого напряжения в диапазоне 0-60 Гц с созданием на валу электродвигателя номинального момента во всем указанном диапазоне частот. При применении электрогидравлического привода с иным видом регулирования электродвигатель маслонапорной установки должен быть оснащен устройством, обеспечивающим его плавный пуск и останов.
6.2.3 При работе электродвигателя в диапазоне частот 0-60 Гц его температура не должна превышать максимально допустимую температуру, указанную в паспорте электродвигателя, для всех режимов его работы.
6.2.4 Для приводов всех механизмов подъемно-опускного типа должны применяться электродвигатели кранового исполнения.
6.2.5 Для всех приводов рекомендуется применять электродвигатели асинхронного типа с короткозамкнутым ротором, электропитание которого осуществляется от трехфазной сети переменного тока напряжением 380 В.
6.2.6 В конструкции электродвигателя должен быть предусмотрен штатный узел для установки датчика скорости ротора, не требующий проведения процедур регулировки соосности датчика при его замене в условиях эксплуатации.
6.2.7 Рекомендуется применять электродвигатели с системой независимого принудительного охлаждения.
6.3 Требования к исполнительным устройствам электродвигателей приводов
6.3.1 Выбор номинальных параметров исполнительного устройства электродвигателя привода должен осуществляться из условия обеспечения двукратного номинального тока электродвигателя во всем диапазоне скоростей вращения электродвигателя.
6.3.2 Выбор номинальных параметров исполнительного устройства электродвигателя привода аварийных ворот должен осуществляться из условия обеспечения 3,5-кратного номинального тока электродвигателя во всем диапазоне скоростей вращения электродвигателя.
6.3.3 Исполнительное устройство должно обеспечивать возможность создания номинального момента на валу электродвигателя при его нулевой скорости вращения как минимум в течение 1 мин.
6.3.4 Исполнительное устройство должно допускать возможность формирования заданной скорости нарастания тока электродвигателя во времени.
6.3.5 Исполнительное устройство должно допускать возможность ограничения скорости нарастания тока электродвигателя во времени.
6.3.6 Исполнительное устройство должно обеспечивать величину динамической ошибки, приведенной к скорости перемещения ворот либо затворов, в пределах заданной в ТЗ.
6.3.7 Исполнительное устройство должно допускать возможность его взаимодействия с аналогичным устройством для создания режимов синхронного управления механизмами.
6.3.8 Исполнительное устройство должно допускать возможность организации различных контуров управления, в том числе контура обратной связи по скорости (частоте вращения электродвигателя) или контура по положению вала двигателя, управляемого этим устройством.
6.4 Требования к исполнительным устройствам электродвигателей приводов, не требующих регулирования и синхронизации движения механизмов
6.4.1 Выбор параметров исполнительного устройства электродвигателя привода должен осуществляться для обеспечения как минимум номинального тока электродвигателя во всем диапазоне скоростей вращения электродвигателя.
6.4.2 Исполнительное устройство должно допускать возможность формирования заданной скорости нарастания тока электродвигателя во времени.
6.4.3 Исполнительное устройство должно допускать возможность ограничения скорости нарастания тока электродвигателя во времени.
7 Требования к свойствам применяемых аппаратных средств
7.1 Требования к ПВС технологических уровней
7.1.1 Применяемые ПВС технологического уровня должны соответствовать требованиям ГОСТ Р 51841.
7.1.2 При проектировании технологических уровней допускается применение ПВС исключительно с аппаратным дублированием вычислительных и сетевых функций, а также внутренних блоков питания. Допускается применение двух отдельных устройств, одно из которых дублирует другое.
7.1.3 Применяемые ПВС должны иметь операционную систему, установленную и настроенную изготовителем вычислительного средства. Доступ к установке иной операционной системы, изменению ее системных настроек, влияющих на устойчивость работы ПВС как устройства, должен быть закрыт изготовителем вычислительного средства.
7.1.4 Применяемые ПВС должны иметь встроенные в операционную систему средства защиты от несанкционированного доступа к пользовательской программе.
7.1.5 Не допускается использование ПВС, поддерживающих возможность загрузки и одновременного выполнения двух и более пользовательских программ.
7.1.6 При включении электропитания ПВС операционная система должна автоматически запускать выполнение пользовательской программы - технологического программного обеспечения.
7.1.7 Применяемые ПВС должны иметь встроенные аппаратные и программные, на уровне операционной системы, средства самодиагностики. Процесс самодиагностики должен запускаться операционной системой в каждом цикле работы ПВС. Должна иметься возможность использования результатов самодиагностики в пользовательской программе.
7.1.8 Применяемые ПВС должны иметь встроенное реле исправности, срабатывание которого должно свидетельствовать о возникновении фатальной ошибки или факте неработоспособности ПВС.
7.1.9 Применяемые ПВС должны обеспечивать "безударное" включение резервного вычислителя при нарушении работоспособности основного, такое включение не должно влиять на технологический процесс судопропуска.
7.1.10 Применяемые ПВС должны иметь модульную структуру. Модули должны иметь конструктивно и функционально законченное исполнение и обеспечивать возможность их горячей замены.
7.1.11 Номенклатура применяемых модулей должна соответствовать следующему функциональному ряду:
- модуль внутреннего источника питания ПВС;
- модуль вычислителя;
- модуль приема сигналов;
- модуль выдачи сигналов;
- модуль поддержки промышленной сети.
7.1.12 При проектировании состава ПВС должен быть обеспечен минимум 5% резерв по суммарному количеству модулей, которые дополнительно могут быть включены в состав ПВС.
7.1.13 При проектировании схемы подключения к ПВС для установленных модулей должен быть обеспечен минимум 10% резерв по количеству свободных входов/выходов каждого типа.
7.1.14 Применяемые ПВС в совокупности с каналами связи должны обеспечивать отработку автоматической реакции СУ на сигнал датчика с доведением команды управления до исполнительного устройства за время, не превышающее 100 мс.
7.1.15 Применяемые ПВС должны обеспечивать возможность подключения к сети ПВС посредством установки двух модулей поддержки интерфейса сети ПВС.
7.2 Требования к ПВС информационно-диагностического уровня
7.2.1 ПВС информационно-диагностического уровня должны иметь блочно-модульную структуру, в структуре ПВС должны быть предусмотрены все необходимые модули для сопряжения с ПВС других уровней.
7.2.2 Модули и блоки ПВС должны быть собраны в отдельную сборочную единицу, предусматривающую возможность монтажа в электромонтажном шкафу.
7.2.3 Применяемые ПВС информационно-диагностического уровня должны иметь 30% резерв вычислительных возможностей, а именно резервы быстродействия, оперативной и долговременной памяти в указанном объеме.
7.2.4 ПВС, предназначенные для хранения архивных данных, должны быть снабжены программными и аппаратными средствами, обеспечивающими непрерывное копирование архивных данных на внутренний резервный носитель информации.
7.2.5 В ПВС информационно-диагностического уровня должны быть предусмотрены программные или аппаратные средства, исключающие возможность несанкционированного использования внешних носителей информации.
7.2.6 В структуре ПВС информационно-диагностического уровня должны быть предусмотрены средства его оперативной перезагрузки.
7.2.7 В структуре ПВС информационно-диагностического уровня должны быть предусмотрены средства автоматического запуска системной и пользовательской программы после штатной перезагрузки или нештатного прерывания питания.
7.2.8 В ПВС информационно-диагностического уровня должны быть предусмотрены механизмы ограничения доступа к изменению системных настроек.
7.2.9 Пользовательское программное обеспечение СУ, установленное на ПВС информационно-диагностического уровня, должно проходить проверку совместимости с системным программным обеспечением.
7.3 Требования к устройствам отображения и ввода информации
7.3.1 При проектировании части центрального пульта управления, отвечающей за технологические уровни СУ, а также местных пультов управления второго уровня должны применяться программируемые терминалы, обеспечивающие выполнение следующих основных функций:
- сохранения пользовательской программы;
- приема данных от ПВС третьего уровня - результатов периодического расчета технологической программы;
- отображения пользовательской программы в виде мнемосхемы, визуализирующей информацию о технологическом состоянии шлюза, а также совокупности сенсорных кнопок и полей;
- визуализации получаемых данных в соответствующих полях мнемосхемы;
- периодического контроля состояния сенсорных полей мнемосхемы;
- передачи данных, сформированных в результате воздействия оператора на сенсорные поля мнемосхемы, в ПВС третьего уровня.
7.3.2 Применяемые терминалы должны иметь операционную систему, установленную и настроенную изготовителем терминала. Доступ к установке иной операционной системы, изменению ее системных настроек, влияющих на устойчивость работы терминала как устройства, должен быть закрыт изготовителем терминала.
7.3.3 Применяемые терминалы должны иметь встроенные в операционную систему средства защиты от несанкционированного доступа к пользовательской программе.
7.3.4 Не допускается использование терминалов, поддерживающих возможность загрузки и одновременного выполнения двух и более пользовательских программ.
7.3.5 При включении электропитания терминала операционная система должна автоматически запускать выполнение пользовательской программы - технологического программного обеспечения визуализации.
7.3.6 Применяемые терминалы должны иметь встроенные аппаратные и программные, на уровне операционной системы, средства самодиагностики. Процесс самодиагностики должен запускаться операционной системой в каждом цикле работы терминала. Должна иметься возможность использования результатов самодиагностики в пользовательских программах соединенного с терминалом ПВС.
7.3.7 Встроенные средства должны обеспечивать возможность проведения экспресс-диагностики, как работоспособности собственно экрана терминала, так и сенсорной поверхности терминала без подключения дополнительных устройств.
7.3.8 Время реакции терминала в части визуализации полученных данных не должно превышать 2 с, а в части обработки сенсорного воздействия - 0,2 с.
7.3.9 Реакция терминала на воздействие оператором на сенсорные элементы не должна зависеть от длительности этого воздействия.
7.3.10 Применяемые терминалы должны иметь следующие характеристики:
- количество отображаемых цветов - не менее 256;
- размер диагонали рабочей области - не менее 380 мм для терминалов ЦПУ, не менее 200 мм для местных терминалов;
- разрешающая способность - не менее 1024х768 точек для терминалов ЦПУ, не менее 640х480 точек для местных терминалов;
- минимальный шаг сенсорной сетки - не более 5 мм.
7.3.11 При проектировании информационно-диагностической части центрального пульта управления допускается применение сенсорных дисплеев, обеспечивающих выполнение следующих основных функций:
- отображения видеоинформации, поступающей от ПВС четвертого уровня;
- периодического контроля состояния сенсорных полей;
- передачи сигналов, связанных с состоянием сенсорного поля в ПВС четвертого уровня.
7.3.12 Применяемые дисплеи должны иметь следующие характеристики:
- количество отображаемых цветов - не менее 256;
- размер диагонали рабочей области - не менее 430 мм;
- разрешающая способность - не менее 1280х1024 точек;
- минимальный шаг сенсорной сетки - не более 5 мм;
- угол обзора по горизонтали - 130°;
- угол обзора по вертикали - 90°.
7.3.13 Терминалы и дисплеи должны иметь регуляторы яркости и контраста.
7.3.14 Степень защиты лицевой поверхности терминалов и дисплеев должна быть не ниже IP54 по ГОСТ 14254.
7.3.15 Ресурс терминалов и дисплеев должен быть не менее 50000 ч.
7.3.16 Конструктивно терминалы и дисплеи должны допускать возможность панельного монтажа.
7.4 Требования к устройствам сетей связи
7.4.1 Для сбора и передачи сигналов на технологическом уровне СУ рекомендуется использовать промышленные сетевые решения, при этом УСО должны размещаться в непосредственной близости от датчиков и приемников сигналов.
7.4.2 При использовании промышленных сетевых решений должны применяться устройства сетей связи, удовлетворяющие требованиям стандарта МЭК 61158.
7.4.3 УСО должны быть модульными, с возможностью горячей замены вышедшего из строя модуля.
7.4.4 Конструкция УСО должна обеспечивать горячую замену вышедшего из строя модуля без программных настроек, все настройки должны осуществляться с помощью переключателей, расположенных на модуле.
7.4.5 Сети сбора и передачи сигналов технологического уровня должны быть резервированными.
7.4.6 Сетевые устройства, служащие для сопряжения УСО с сетью передачи данных, должны иметь уникальный адрес, закрепленный за этим устройством.
7.4.7 На технологическом уровне СУ допускается использовать только сетевые решения с гарантированным временем доставки сообщений.
7.4.8 В УСО должен быть предусмотрен механизм самодиагностики, результаты работы которого должны передаваться в программы ПВС технологического уровня.
7.4.9 Номенклатура применяемых модулей УСО должна соответствовать следующему функциональному ряду:
- модуль адресного сопряжения с сетью;
- модуль подключения электропитания;
- модуль приема сигналов;
- модуль выдачи сигналов;
- модуль восстановления настроечных параметров.
7.4.10 При использовании распределенных сетевых решений для сбора и передачи сигналов в сетях датчиков и силовой аппаратуры необходимо предусмотреть резервирование элементов сетей, предназначенных для сбора и передачи сигналов.
7.4.11 Устройства, обеспечивающие работу сетей, должны быть снабжены механизмами диагностики их состояния, результаты диагностики должны передаваться в ПВС технологического уровня.
7.4.12 Конструктивное исполнение оборудования передачи данных должно обеспечивать возможность оперативной замены вышедших из строя сетевых устройств. Подключение сетевого оборудования должно обеспечиваться с помощью клемм и разъемов, без использования паяных соединений.
7.4.13 Максимальное время прохождения сигнала по всем трактам передачи данных от датчика до центрального пульта не должно превышать 0,5 с.
7.4.14 Кабели сетей связи должны быть выбраны с учетом условий эксплуатации и рекомендаций производителя оборудования сетей связи. Кабели сетей связи должны иметь повышенную механическую прочность.
7.4.15 Кабели сетей связи, прокладываемые вне помещений устоев, должны иметь защитную бронированную оболочку.
7.5 Требования к силовой аппаратуре
7.5.1 В качестве управляющих и коммутационных исполнительных устройств должны применяться серийно выпускаемые модульные устройства.
7.5.2 Управляющие исполнительные устройства технологических электроприемников, таких как электродвигатели исполнительных механизмов, должны обеспечивать:
- плавный разгон и торможение электродвигателя с заранее заданным временем разгона и временем торможения;
- поддержание номинального момента двигателя во всем допустимом диапазоне скоростей;
- возможность реализации максимального момента электродвигателя для приводов аварийных ворот во всем диапазоне поддержания скорости;
- точность поддержания частоты питания электродвигателя - 0,01 Гц;
- диапазон изменения частоты питания электродвигателя - от 0 до 60 Гц;
- шаг задания частоты питания электродвигателя - 0,01 Гц.
7.5.3 Управляющие исполнительные устройства электродвигателей должны обеспечивать нормальную работу последних при длине кабеля, достигающей не менее 100 м.
7.5.4 Управляющее исполнительное устройство электродвигателя должно осуществлять автоматическое согласование (настройку) своих параметров с параметрами подключенного к нему электродвигателя.
7.5.5 Управляющие исполнительные устройства электродвигателей должны иметь возможность подключения к управляющей сети силовой аппаратуры первого уровня для получения задания скорости и передачи технологических параметров, таких как текущие скорость вращения и ток электродвигателя, а также для передачи диагностической информации.
7.5.6 Управляющие исполнительные устройства технологических электроприемников, таких как электродвигатели исполнительных механизмов, не требующих реализации режимов синхронизации скоростей и/или положений ворот, затворов, устройств защиты ворот от навала судов или их составных частей, должны обеспечивать:
- плавный разгон и торможение электродвигателя с заранее заданными временем разгона и временем торможения;
- возможность реализации максимального момента электродвигателя для приводов аварийных ворот во всем диапазоне изменения скорости движения.
7.5.7 В конструкции управляющих исполнительных устройств электродвигателей должны быть предусмотрены дискретные входы, предназначенные для приема дискретных управляющих команд, сформированных УСО второго уровня.
7.5.8 В конструкции управляющих исполнительных устройств электродвигателей должны быть предусмотрены дискретные выходы, предназначенные для выдачи релейного сигнала аварии в УСО второго уровня.
7.5.9 Команды запуска и останова исполнительных устройств технологических электроприемников должны формироваться в виде релейных сигналов УСО второго уровня.
7.5.10 Управляющие исполнительные устройства электродвигателей должны иметь возможность диагностики следующих параметров:
- наличия всех питающих фаз;
- обрыва фаз на выходе исполнительного устройства;
- соответствия входного напряжения заранее заданному значению;
- наличия превышения предварительно заданного значения тока электродвигателя;
- отсутствия межфазного замыкания на выходе исполнительного устройства;
- отсутствия замыкания фаза-ноль на выходе исполнительного устройства;
- отсутствия замыкания фаза-земля на выходе исполнительного устройства;
- соответствия суммарного сопротивления изоляции выходного кабеля управляющего исполнительного устройства и обмоток электродвигателя допустимому значению;
- соответствия сопротивления изоляции питающего кабеля допустимому значению.
7.5.11 Управляющие исполнительные устройства электродвигателей должны удовлетворять требованиям электромагнитной совместимости по МЭК 61800-3, категория С3.
7.5.12 Каждая сборка шкафов силовой аппаратуры должна быть снабжена вводным устройством защитного отключения.
7.5.13 Все силовые сборки должны быть снабжены вводными коммутационными исполнительными устройствами, отключающими электропитание силовой сборки в случае возникновения нештатной ситуации.
7.5.14 Время отключения питания силовой сборки при возникновении нештатной ситуации не должно превышать 1 с, начиная с момента поступления команды на отключение.
7.5.15 В качестве вводных коммутационных исполнительных устройств должны использоваться контакторы или устройства защитного отключения многократного действия, оснащенные моторизированными приводами.
7.5.16 В силовых сборках должны быть предусмотрены отдельные устройства защитного отключения электропитания на каждый электроприемник.
7.5.17 Рекомендуется использовать устройства защитного отключения многократного действия.
7.5.18 Конструкция устройств защитного отключения многократного действия в случае срабатывания должна предусматривать возможность восстановления посредством механического воздействия на них.
7.5.19 Выбор коммутационных устройств и устройств защитного отключения, связанных с работой электродвигателей, должен производиться с учетом возможности 2-кратного продолжительного значения номинального тока электродвигателей.
7.5.20 Устройства защитного отключения и коммутационные устройства должны быть снабжены сигнальными контактами, необходимыми для контроля их состояния. Сигналы от сигнальных контактов должны обрабатываться в программах ПВС второго уровня.
7.5.21 В конструкции устройств защитного отключения должны быть предусмотрены средства проверки механического размыкания силовой цепи.
7.5.22 Коммутационные устройства, подключающие резервный комплект оборудования в случае выхода из строя основного, должны быть снабжены устройствами механической и электрической блокировки для исключения возможности одновременного включения основного и резервного комплектов оборудования.
7.6 Требования к внутренней организации электропитания СУ
7.6.1 Электропитание исполнительных устройств, связанных с работой технологических электроприемников, должно осуществляться от трехфазной сети переменного тока напряжением 380 В в соответствии с указаниями 4.9. Исполнительные устройства, решающие задачи коммутации, должны быть запитаны напряжением 220 В - одна из фаз трехфазной сети переменного тока напряжением 380 В и нейтраль.
7.6.2 Уровень напряжения в сигнальных цепях дискретных датчиков технологических параметров должен составлять 220 В переменного тока.
7.6.3 Не допускается использование напряжения подсистемы гарантированного электропитания для питания сигнальных цепей дискретных датчиков технологических параметров.
7.6.4 Сигналы, поступающие на входные модули ПВС или УСО от дискретных датчиков технологических параметров, должны иметь гальваническую развязку. Гальваническую развязку рекомендуется выполнять при помощи электромагнитных реле.
7.6.5 Электропитание сигнальных цепей входных и выходных модулей ПВС и УСО должно осуществляться от вторичных источников электропитания с выходным напряжением 24 В постоянного тока.
7.6.6 Не допускается осуществлять электропитание сигнальных цепей, входных и выходных модулей ПВС и УСО, основного и резервного комплектов оборудования от одних и тех же вторичных источников электропитания.
7.6.7 В конструкции единого группового шкафа, предназначенного для ввода и распределения всех типов электропитания по шкафам сборки, должен быть предусмотрен АВР, обеспечивающий подключение к основной или резервной кабельной линии подсистемы гарантированного электропитания.
7.6.8 Конструкция АВР единого группового шкафа должна предусматривать возможность ручного выбора основной или резервной кабельной линии подсистемы гарантированного электропитания.
7.6.9 Напряжение подсистемы гарантированного электропитания с выхода АВР единого группового шкафа должно поступать на общую шину гарантированного электропитания основного и резервного комплектов оборудования сборки шкафов.
7.6.10 Электропитание ПВС и вторичных источников постоянного напряжения должно осуществляться от напряжения с общей шины гарантированного электропитания сборки шкафов.
8 Требования к конструктивному исполнению СУ
8.1 Общие требования к конструктивному исполнению СУ
8.1.1 Оборудование, входящее в состав СУ, должно размещаться в электромонтажных шкафах и пультах.
8.1.2 Шкафы и пульты СУ должны быть снабжены замками, запираемыми на ключ.
8.1.3 Все электромонтажные шкафы должны быть снабжены светильниками, включение светильников должно осуществляться автоматически при открытии двери шкафа.
8.1.4 Электромонтажные шкафы, в которых размещены устройства, требующие подключения внешних приборов для их настройки в процессе наладки, должны быть снабжены розетками электропитания с напряжением 220 В переменного тока.
8.1.5 Кабельные сети между шкафами, пультами, датчиками и технологическими электроприемниками должны прокладываться в закрытых кабельных каналах, металлических лотках и трубах.
8.1.6 Открытые участки силовых и сигнальных кабелей должны быть защищены металлоруковом.
8.1.7 Ввод силовых и сигнальных кабелей в шкафы и пульты должен осуществляться через герметичные кабельные вводы.
8.1.8 Цифровые обозначения штепсельных разъемов должны обеспечивать правильное подключение кабелей и не должны при подключении закрываться корпусами разъемов.
8.1.9 Конструкция модулей и блоков СУ должна предусматривать возможность обслуживания, при этом должен быть обеспечен беспрепятственный доступ ко всем элементам, требующим обслуживания.
8.1.10 Надписи и гравировки на элементах СУ должны быть удобны для чтения и указывать на штатные места установки элементов.
8.1.11 Для стыковки отдельных блоков и модулей СУ, а также для подключения датчиков и исполнительных устройств к СУ должны быть предусмотрены разъемы, клеммы, винтовые соединения и другие виды соединения, позволяющие производить быструю замену неисправного блока или модуля.
8.1.12 Оборудование внутри шкафов должно располагаться с учетом обеспечения требований, предъявляемых производителем оборудования для нормальной работы оборудования.
8.1.13 Компоновка шкафов должна обеспечивать беспрепятственный доступ к автоматическим выключателям и рубильникам СУ.
8.1.14 На внутренней стороне дверей электромонтажных шкафов и пультов должна быть размещена однолинейная схема по ГОСТ 21.613 с указанием назначения автоматических выключателей и рубильников.
8.1.15 В конструкции шкафов и пультов должны быть предусмотрены конечные выключатели, срабатывающие при открывании двери.
8.1.16 Все исполнительные устройства и устройства защитного отключения СУ, относящиеся к технологическим электроприемникам, должны быть снабжены дополнительными сигнальными контактами.
8.1.17 Климатическое исполнение пультов, шкафов и датчиков СУ, а также технологических электроприемников должно обеспечивать надежную работу оборудования в условиях, соответствующих климатической зоне, в которой находится шлюз. Требования к исполнению определяются по ГОСТ 15150.
8.1.18 Степень защиты электрооборудования от пыли и влаги с учетом положений ГОСТ 14254 должна быть не ниже следующих показателей:
- для шкафов силовых и шкафов управления, находящихся в помещениях: по фронтальным и боковым сторонам - не ниже IP54; по тыловым, верхним и нижним сторонам - не ниже IP20;
- для шкафов силовых и шкафов управления, находящихся на улице: по всем сторонам - не ниже IP54;
- для местных пультов управления, находящихся в помещениях, - не ниже IP41;
- для местных пультов управления, находящихся на улице, - не ниже IP54;
- для датчиков, находящихся внутри помещений, - не ниже IP55;
- для датчиков, находящихся вне помещений, - не ниже IP65.
8.1.19 Аппаратура ЦПУ и ПВС четвертого уровня, размещаемая в отапливаемых помещениях, должна нормально функционировать при следующих условиях:
- температура окружающей среды - от +10 °С до +50 °С;
- относительная влажность воздуха - до 80% при 25 °С;
- атмосферное давление - от 86,6 до 106,7 кПа.
8.1.20 ПВС второго и третьего технологических уровней, размещаемые в шкафах, должны надежно функционировать при следующих условиях:
- температура окружающей среды - от +5 °С до +45 °С;
- относительная влажность воздуха - до 90% при 25 °С;
- атмосферное давление - от 86,6 до 106,7 кПа.
8.2 Требования к конструктивному исполнению датчиков
8.2.1 Для разъемов и электрических соединений датчиков, установленных на исполнительных механизмах, должны быть приняты дополнительные меры, исключающие нарушение электрического контакта в результате воздействия вибрации.
8.2.2 Датчики, устанавливаемые на механизмы, должны быть защищены металлическими кожухами.
8.2.3 Подключение дискретных датчиков к СУ должно осуществляться многожильными медными кабелями, сечение жил которых должно быть не менее 1,5 мм или соответствовать сечениям, указанным в технической документации на используемые датчики.
8.2.4 Основной и дублирующий датчики по возможности должны устанавливаться на механизме двумя независимыми кронштейнами. Выход из строя кронштейна основного датчика не должен выводить из строя дублирующий датчик.
8.2.5 Датчики должны устанавливаться на механизмы с помощью кронштейнов, снижающих влияние вибрации, возникающей при работе механизма.
8.2.6 Места установки датчиков на механизмы необходимо выбирать с учетом обеспечения удобства обслуживания механизма.
8.2.7 Способ крепления датчика к механизму должен обеспечивать удобство замены датчика в случае выхода его из строя.
8.2.8 Место подключения кабеля к датчикам должно быть герметизировано.
8.2.9 В качестве датчиков наличия судна должны использоваться датчики оптического или иного принципа действия, обеспечивающие их надежную работу в условиях тумана, а также при полном отсутствии освещения.
8.2.10 Датчики наличия судна должны быть снабжены индикаторами, позволяющими обеспечить их оперативную настройку и диагностику.
8.2.11 Датчики, используемые для определения положений ворот, положений затворов, уровней воды в бьефах и камерах шлюза, наличия судна, должны отвечать следующим требованиям:
- относительная влажность - до 98%;
- температура эксплуатации - от -15 °С до +50 °С;
- температура хранения - от -40 °С до +70 °С;
- точность измерения - не хуже 0,1% от диапазона измерений;
- устойчивость к внешним механическим воздействиям - группа М6 по ГОСТ 30631;
- срок службы - не менее 15 лет.
9 Требования к организации блокировок
9.1 Требования к организации технологических блокировок
9.1.1 Технологические блокировки должны формироваться в виде результата программной обработки двух групп сигналов. Первая группа сигналов поступает от датчиков, а именно: от датчиков положения исполнительных механизмов, конечных выключателей предельных положений, датчиков уровня воды, датчиков предельных нагрузок, датчиков давления, а также датчиков наличия судна в створах ворот. Вторая группа сигналов формируется в виде сигналов аварийных стоповых кнопок и ключей, а также сигналов готовности и исправности аппаратных средств СУ.
9.1.2 При проектировании СУ должны быть реализованы следующие технологические блокировки:
- блокировка возможности маневрирования исполнительными механизмами ворот и затворов системы наполнения (опорожнения) шлюза при незакрытых воротах и затворах противоположной головы камеры;
- блокировка возможности маневрирования исполнительными механизмами при неравных уровнях верхнего и нижнего (промежуточного) бьефов ворот и затворов, не рассчитанных на перемещение под напором;
- блокировки, ограничивающие ход ворот и затворов;
- блокировки возможности включения соответствующего исполнительного устройства при наложении стопоров на исполнительный механизм или при работе механизма от ручного привода.
9.1.3 Реализацию технологической блокировки допускается выполнять двумя способами: программным или совокупностью аппаратного и программного.
9.1.4 В случае программного способа реализации технологических блокировок одни и те же сигналы двух групп должны обрабатываться одновременно в программах ПВС второго и третьего уровня СУ.
9.1.5 Должны быть предусмотрены следующие защитные блокировки:
- предельные положения ворот и затворов в каждом направлении движения;
- максимальная перегрузка исполнительных механизмов и передач;
- предельно допустимый обратный напор на двустворчатые ворота;
- маневрирования подъемно-опускных ворот или предохранительных устройств, исключающие их перемещение при прохождении (нахождении) судна под (над) ними;
- ослабление тяговых органов (канатов, цепей и др.) ниже допустимых пределов;
- работы исполнительных механизмов ворот и затворов при нештатной остановке последних;
- повторного включения исполнительных устройств при включении электропитания в случае предшествовавшего отключения последнего;
- возможности управления исполнительными механизмами одновременно с центрального и местных пультов управления;
- при превышении предельно допустимого перекоса подъемно-опускных ворот, за исключением режима аварийного закрытия;
- маневрирования исполнительными механизмами систем наполнения, перепуска, опорожнения при угрозе создания неблагоприятных гидравлических режимов в межшлюзовых бьефах, смежных камерах, нитках шлюза;
- включения силовых цепей исполнительного устройства при выходе из строя компонентов самого исполнительного устройства, обрыве питающих или выходных фаз, межфазном пробое в выходном кабеле, пробое любой выходной фазы на землю, падении сопротивления изоляции выходного кабеля или электродвигателя, перенапряжении на клеммах электродвигателя, перегрузке или перегреве электродвигателя.
9.1.6 Алгоритм работы СУ должен предусматривать отключение силового питания исполнительных устройств исполнительных механизмов при самопроизвольном включении любого из них без выработки ПВС второго уровня управляющей команды на его включение.
9.1.7 Объем технологических и защитных блокировок должен соответствовать конструктивным и технологическим особенностям силовой аппаратуры, электроприемников, исполнительных механизмов и шлюза в целом.
9.1.8 Электрические цепи датчиков, формирующих сигналы для реализации технологических и защитных блокировок, должны быть спроектированы таким образом, чтобы отсутствие напряжения или логического сигнала в выходной цепи датчика считалось сигналом срабатывания блокировки.
9.1.9 На территории шлюза, в зонах визуального контроля работы ворот, затворов, исполнительных механизмов и других потенциально опасных устройств должны быть установлены поворотные ключи аварийного останова и кнопки "Аварийный Стоп".
9.1.10 Сигналы срабатывания поворотных ключей аварийного останова и кнопок "Аварийный Стоп" должны приводить к отключению силового напряжения от всех технологических электроприемников механизмов шлюза.
9.1.11 В составе оборудования третьего уровня СУ должно быть предусмотрено реле центрального управления, предназначенное для гарантированного отключения цепей управления исполнительных устройств, обеспечивающих работу исполнительных механизмов. Коммутация цепей управления исполнительных устройств должна осуществляться с помощью реле или контакторов, имеющих прямую электрическую связь с реле центрального управления.
9.1.12 Конечные выключатели, применяемые для контроля состояния механических блокирующих устройств, должны быть установлены таким образом, чтобы при вводе механических блокирующих устройств в зацепление с блокируемым механизмом взводились возвратные пружины приводных рычагов конечных выключателей.
9.1.13 В объем ПО четвертого уровня должна входить программа, обеспечивающая возможность временного отключения сработавших блокировок.
9.1.14 Программа отключения сработавших блокировок не должна влиять на их реальное состояние при работе шлюза в режимах автоматического, циклового и раздельного управления. Отключение сработавших блокировок допускается только в режиме местного управления.
9.1.15 Выход из программы отключения сработавших блокировок должен приводить к восстановлению логики обработки сигналов блокировок на технологическом уровне СУ.
9.2 Требования к светофорной сигнализации
9.2.1 В составе СУ должны быть предусмотрены средства управления и контроля светофорной сигнализацией.
9.2.2 Схема управления светофорами должна предусматривать наличие элементов, подтверждающих включение сигнальных огней.
9.2.3 Управление навигационной сигнализацией должно осуществляться от ПВС третьего уровня СУ.
9.2.4 При автоматическом режиме работы СУ сигналы светофоров должны переключаться автоматически в соответствии с предусмотренным алгоритмом.
9.2.5 В случае нештатного отключения или перегорания источника света разрешающего сигнала СУ должна автоматически включить запрещающий сигнал неисправного светофора, при этом должен сформироваться сигнал неисправности светофора.
9.2.6 Информация о неисправностях светофоров должна отображаться на ЦПУ и АРМ инженера.
9.2.7 Алгоритмы работы светофорной сигнализации должны предусматривать следующие блокировки:
- включения разрешающих огней светофоров камеры при наличии установленного в рабочее положение заграждающего устройства;
- возможности включения разрешающих огней входных и выходных светофоров при отсутствии открытого положения соответствующих ворот;
- возможности включения разрешающего огня входного светофора верхней головы при отсутствии установленного в рабочее положение устройства защиты ворот от навала судов (при его наличии и исправности);
- возможности включения разрешающих огней входного и выходного светофоров нижней головы при наличии установленного в рабочее положение устройства защиты ворот от навала судов (при его наличии).
9.2.8 Дополнительные режимы работы светофорной сигнализации должны оговариваться в частном техническом задании.
9.3 Требования к организации внутренних блокировок ПВС
9.3.1 При проектировании СУ должны быть предусмотрены следующие блокировки и защиты, связанные с функционированием программно-вычислительных средств:
- изменяемые в процессе настройки параметры СУ должны быть защищены системой паролей с различными уровнями доступа;
- технологическое программное обеспечение должно обеспечивать контроль действий оператора, в том числе предотвращать исполнение неверно сформированных оператором команд.
9.3.2 При наличии одновременного состояния неисправности в работе любого основного и соответствующего резервного элементов СУ должна остановить выполнение технологического процесса судопропуска до устранения неисправности как минимум одного из этих элементов.
9.3.3 При возникновении неисправности в работе элемента ПВС должен осуществляться автоматический переход на резервный исправный элемент с выдачей информации на центральный пульт оператора о возникшей неисправности, при этом технологический процесс судопропуска не должен прерываться, должна быть обеспечена возможность горячей замены неисправного элемента.
9.3.4 Результаты диагностики элементов ПВС, силовой аппаратуры, аппаратуры сетей, выход из строя которых может привести к нарушению работы технологического процесса судопропуска, должны входить в общий виртуальный сигнал "готовности" оборудования, разрешающий штатную работу СУ.
9.4 Требования к организации уровней доступа
9.4.1 Допуск эксплуатационного персонала к работе с СУ должен быть организован посредством парольной аутентификации пользователей.
9.4.2 В системе должно быть предусмотрено как минимум два уровня доступа:
- 1 уровень - доступ оперативного персонала категорий диспетчер (начальник вахты) шлюза;
- 2 уровень - доступ административно-технического персонала категорий старший специалист, начальник шлюза.
9.4.3 На первом уровне доступа должна обеспечиваться возможность:
- управлять технологическим процессом судопропуска;
- переключать режимы работы СУ;
- просматривать технологические измеряемые и настраиваемые параметры;
- просматривать настраиваемые параметры работы СУ;
- просматривать измеряемые и настраиваемые параметры работы механизмов;
- просматривать архивы аварийных и диагностических сообщений.
9.4.4 На втором уровне доступа дополнительно должна обеспечиваться возможность:
- производить отключение сработавших блокировок;
- производить маневрирование механизмами с местных пультов после отключения сработавших блокировок;
- производить настройку технологических параметров СУ;
- производить настройку параметров, связанных с работой СУ;
- производить настройку параметров, связанных с работой механизмов;
- копировать архивы сбоев и аварий на электронный носитель;
- просматривать архивы системы технологического видеонаблюдения;
- копировать архивы системы технологического видеонаблюдения на электронный носитель.
10 Требования к надежности СУ
10.1 Требования к основным показателям надежности
10.1.1 Требования к основным показателям надежности проектируемой СУ должны устанавливаться в соответствии с рекомендациями 1.9-1.12 ГОСТ 27.003.
10.1.2 СУ должна отвечать следующим параметрам надежности:
- рекомендуемый коэффициент готовности одного канала системы - 0,999, конкретное значение должно задаваться в частном техническом задании;
- время восстановления, не более - 30 мин;
- срок службы - 15 лет;
- средний срок сохранности - 5 лет при соблюдении условий хранения, предъявленных производителем.
10.2 Дополнительные требования обеспечения надежности
10.2.1 СУ должна быть спроектирована как по меньшей мере однократно резервированная.
10.2.2 Параметры применяемых при проектировании СУ элементов и устройств должны быть устойчивыми в рамках задаваемых внешних воздействий и возмущений и иметь гарантированный срок работоспособности в соответствии с требованиями, изложенными в разд.8 настоящего стандарта.
10.2.3 СУ должна быть спроектирована как система, обеспечивающая самодиагностику основных ее элементов с возможностью непрерывного контроля состояния элементов СУ, не обладающих функцией самодиагностики.
10.2.4 Алгоритмы диагностирования должны быть устойчивыми, и их выполнение не должно зависеть от выполнения любых иных алгоритмов, осуществляемых самодиагностируемым элементом или ПВС.
10.2.5 Помимо требования устойчивой работы при любом однократном отказе СУ должна быть конструктивно и функционально спроектирована как ремонтопригодная система, в которой должен быть обеспечен легкий доступ ко всем ее частям и элементам.
10.2.6 Заказчик и проектировщик СУ должны согласовать номенклатуру и количественный состав запасных частей, инструментов и принадлежностей, обеспечивающий при любых произошедших отказах СУ замену отказавших элементов, устройств в течение времени, не превышающего допустимого времени простоя СГТС.
10.2.7 Номенклатура комплектующих и материалов, применяемых в проектируемой СУ, должна быть общедоступной, стандартизованной и снабженной всем необходимым набором технической документации.
10.2.8 Срок гарантии изготовителя СУ не может быть менее 36 месяцев со дня ввода СУ в эксплуатацию.
11 Требования к алгоритмам работы СУ
11.1 Общие требования к алгоритмам управления СУ
11.1.1 Алгоритм управления СУ должен учитывать особенности конструктивного исполнения шлюза.
11.1.2 Помимо последовательности производимых в технологическом процессе судопропуска операций алгоритм должен отражать порядок реализации технологических блокировок и защит.
11.1.3 Алгоритм управления должен предусматривать последовательность действий оператора при возникновении нештатных ситуаций на доступном ему уровне.
11.1.4 Для каждого конкретного конструктивного исполнения СГТС алгоритм управления СУ должен быть утвержден заказчиком и согласован с проектировщиком СУ.
11.1.5 Алгоритм должен являться составной частью технологического регламента судопропуска.
11.2 Требования к алгоритмам управления второго уровня СУ
11.2.1 Алгоритм управления второго уровня должен учитывать особенности конструктивного исполнения исполнительных механизмов, ворот и затворов шлюза.
11.2.2 Алгоритм управления второго уровня должен определять порядок взаимодействия второго уровня с третьим уровнем в части технологических блокировок и защит.
11.2.3 Алгоритм управления второго уровня должен содержать условия аварийного останова.
11.3 Требования к алгоритмам управления третьего уровня СУ
11.3.1 Алгоритм управления третьего уровня должен содержать порядок визуализации технологических состояний СГТС.
11.3.2 Алгоритм управления третьего уровня должен содержать условия и порядок переключения на резервный канал СУ.
11.3.3 Алгоритм управления третьего уровня должен определять порядок реализации технологических блокировок и защит.
11.3.4 Алгоритм управления третьего уровня должен определять порядок взаимодействия СУ с оператором.
11.3.5 Алгоритм управления третьего уровня должен обеспечивать управление технологическим процессом судопропуска на основе выполнения строгой последовательности операций по маневрированию исполнительными механизмами и соответствия выполняемых операций текущему технологическому состоянию шлюза. Технологические состояния шлюза определены в 3.2.12 настоящего стандарта.
11.3.6 Переходы из одного технологического состояния шлюза в другое и от одной операции по маневрированию исполнительными механизмами к другой должны осуществляться по результатам обработки информации, получаемой от независимых источников.
11.3.7 Алгоритм управления третьего уровня должен определять порядок управления технологическими состояниями шлюза. Алгоритм управления технологическими состояниями для однокамерного шлюза приведен на рисунке 1.
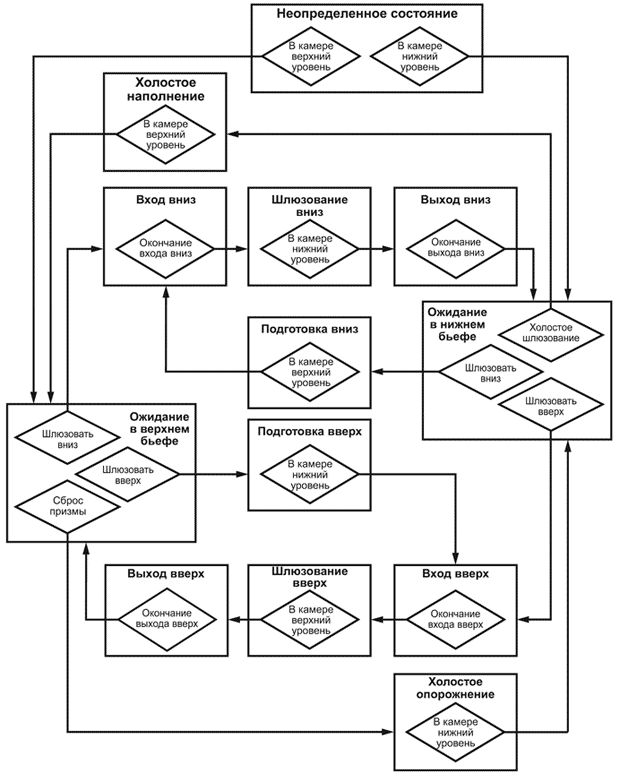
![]() - технологическое состояние шлюза;
- технологическое состояние шлюза;
![]() - условие перехода в следующее технологическое состояние;
- условие перехода в следующее технологическое состояние;
![]() - переход в следующее технологическое состояние при выполнении условия
- переход в следующее технологическое состояние при выполнении условия
Рисунок 1 - Алгоритм управления технологическими состояниями для однокамерного шлюза
11.3.8 Алгоритм управления третьего уровня должен обеспечивать строгую последовательность операций по маневрированию исполнительными механизмами шлюза. Алгоритм обеспечения последовательности операций по маневрированию исполнительными механизмами для однокамерного шлюза приведен на рисунке 2.
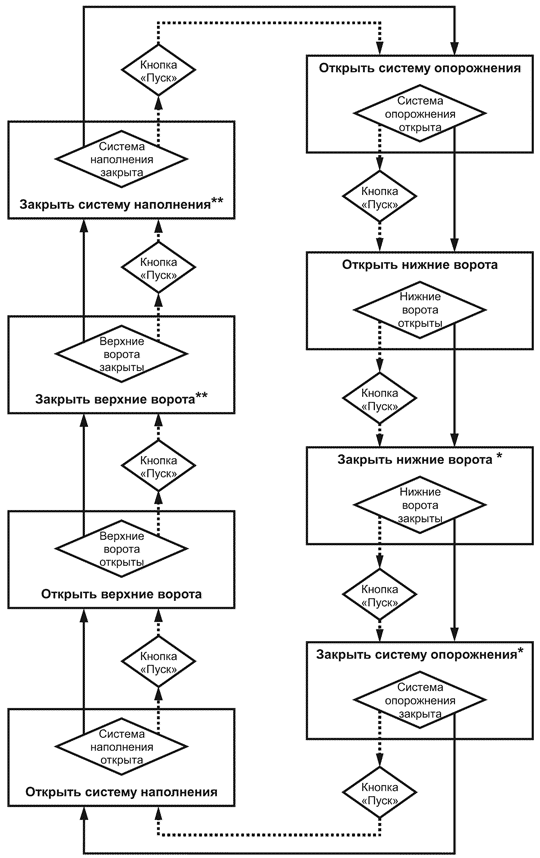
![]() - технологические операции, отмеченные знаками (*) и (**), могут осуществляться параллельно;
- технологические операции, отмеченные знаками (*) и (**), могут осуществляться параллельно;
![]() - условие выполнения технологической операции;
- условие выполнения технологической операции;
![]() - режим автоматизированного непрерывного управления судопропуском;
- режим автоматизированного непрерывного управления судопропуском;
![]() - режим автоматизированного пошагового управления судопропуском
- режим автоматизированного пошагового управления судопропуском
Рисунок 2 - Алгоритм обеспечения последовательности операций по маневрированию исполнительными механизмами для однокамерного шлюза
12 Общие требования к программному обеспечению
12.1 Требования к технологическому программному обеспечению
12.1.1 Разработка ТПО должна осуществляться на основании утвержденного алгоритма управления СУ шлюза.
12.1.2 Основные требования к функциям ТПО каждого уровня изложены в 4.2 настоящего стандарта.
12.1.3 ТПО в целом должно обеспечивать реализацию всех изложенных в разделе 9 настоящего стандарта блокировок и защит.
12.1.4 Языки программирования ТПО второго и третьего уровней должны соответствовать МЭК 61131-3.
12.1.5 ТПО всех уровней должно быть детерминированным, т.е. исполнять строгое однозначное следование алгоритмам работы СУ в части заданных воздействий на СУ и ответных реакциях СУ на заданные воздействия.
12.1.6 Формат ТПО второго и третьего уровней должен иметь модульную структуру с перспективой модернизации как отдельных частей, так и в целом.
12.1.7 ТПО должно предусматривать возможность перехода на временные режимы работы, связанные с работой шлюза в паводковый и в меженный периоды и т.д. Дополнительные режимы работы должны оговариваться в частном техническом задании.
12.2 Требования к информационно-диагностическому программному обеспечению
12.2.1 Основные требования к функциям ПО четвертого уровня изложены в 4.2 настоящего стандарта.
12.2.2 Выбор языка программирования ПО четвертого уровня должен осуществляться проектировщиком СУ.
12.2.3 Формат ПО четвертого уровня должен иметь модульную структуру с перспективой модернизации как отдельных частей, так и в целом.
12.3 Требования к протоколам передачи данных
12.3.1 Протоколы передачи данных, используемые для передачи информации в сетях ПВС технологического уровня, должны удовлетворять следующим требованиям:
- гарантированная доставка пакетов данных;
- контроль целостности данных в сообщениях;
- детерминированность передачи данных.
12.3.2 Должна быть предусмотрена возможность хранения настроечных параметров сети на электронных носителях.
12.3.3 Должны быть предусмотрены программные средства, позволяющие осуществлять настройку, диагностику и считывание параметров сети.
13 Требования к объему проверок и методам испытаний
13.1 На этапе изготовления СУ
13.1.1 Изготовление аппаратуры СУ должно осуществляться с учетом требований ГОСТ Р 52549.
13.1.2 На этапе изготовления объем проверок аппаратуры СУ должен в целом соответствовать требованиям разд.3 ГОСТ 24.104.
13.1.3 В заводских условиях должна быть выполнена предварительная проверка работоспособности комплекса СУ.
13.1.4 Проверка аппаратной части комплекса должна производиться после комплектной сборки шкафов и иных составных частей СУ в два этапа:
- без включения электропитания;
- с включением электропитания.
13.1.5 В рамках проверки аппаратной части комплекса без включения электропитания методами визуального и аппаратного контроля должны производиться:
- проверка качества монтажа;
- проверка всех механических соединений;
- проверка качества соединения заземляющих проводников;
- проверка кабельных соединений на предмет отсутствия межфазных замыканий;
- проверка подключения блоков питания к нагрузке с контролем полярности подключения;
- проверка монтажа с установлением соответствия собранного комплекта технических средств проектной документации.
13.1.6 В рамках проверки аппаратной части комплекса с включением электропитания должны производиться:
- аппаратная настройка сетевых приборов в соответствии с инструкциями по эксплуатации и требованиями проекта;
- настройка приборов контроля, таких как терморегуляторы, реле контроля токов, реле контроля напряжений и т.д., в соответствии с инструкциями по эксплуатации;
- проверка работоспособности вычислительных средств и средств отображения информации, входящих в состав аппаратного комплекса, методом визуального контроля индикаторов состояния средств;
- проверка трактов прохождения сигналов от датчиков до устройств приема сигналов. Для проверки трактов прохождения сигналов допустимо использование устройств, имитирующих сигналы датчиков. Результаты проверки должны заноситься в журнал проверки сигналов;
- проверка работоспособности исполнительных и коммутационных устройств методом визуального контроля их индикаторов состояния;
- проверка трактов прохождения сигналов от вычислительных средств до исполнительных устройств методом визуального контроля изменений состояния индикаторов работы устройств;
- проверка работоспособности коммутационных устройств, таких как магнитные контакторы и реле, методом визуального и аппаратного контроля.
13.1.7 Выявленные дефекты должны фиксироваться в производственном журнале.
13.1.8 Дефекты, обнаруженные в результате проверки, должны быть устранены в заводских условиях.
13.1.9 После устранения дефектов проверка комплекса производится повторно в полном объеме.
13.1.10 В рамках предварительной проверки программной части комплекса должна производиться:
- программная настройка сетевых приборов - запись сохраненных на электронном носителе настроек в память сетевых приборов или настройка параметров работы сетевых приборов на основании данных проекта;
- настройка параметров исполнительных устройств - должна производиться на основании данных проекта и паспортных данных технологических электроприемников;
- загрузка программного обеспечения в СУ;
- проверка работоспособности интерфейсов и протоколов СУ - в рамках этой проверки обязательной является проверка программными и аппаратными методами стабильной работоспособности сетей на скоростях, предусмотренных проектом;
- проверка программного обеспечения, загруженного в ПВС информационно-диагностического уровня, на отсутствие программных "вирусов".
13.1.11 Дефекты, обнаруженные на этапе предварительной проверки программной части комплекса, должны быть устранены в заводских условиях.
13.2 На этапе пусконаладочных работ
13.2.1 При проведении пусконаладочных работ без включения электропитания должны быть проведены следующие проверки:
- проверка качества произведенных строительно-монтажных работ, связанных с установкой комплекса средств СУ на шлюзе;
- проверка механических и электрических соединений отдельных элементов комплекса средств СУ методом визуального и аппаратного контроля;
- проверка механических сопряжений датчиков и механизмов методом визуального и аппаратного контроля;
- проверка соответствия произведенных строительно-монтажных работ данным рабочей документации;
- проверка последовательности чередования фаз электропитания для частей комплекса, расположенных в разных зданиях, методом аппаратного контроля.
13.2.2 При проведении пусконаладочных работ с включением электропитания должны быть проведены следующие проверки и настройки:
- проверка срабатывания защит, приводящих к отключению силового питания элементов СУ или СУ в целом;
- проверка срабатывания технологических защит, приводящих к останову движения механизмов. Проверка производится посредством механического воздействия на датчики, срабатывание которых приводит к срабатыванию защит, или посредством переноса предела срабатывания программной защиты в зону нормальной работы механизма;
- проверка направления вращения электродвигателей. При проверке направления вращения валы двигателей должны быть механически отсоединены от нагрузки;
- настройка внутренних параметров исполнительных устройств в части соответствия характеристикам установленных на шлюзе электродвигателей. При наличии встроенных алгоритмов самонастройки рекомендуется автоматическая настройка исполнительных устройств;
- настройка внутренних параметров исполнительных устройств, таких как токовая защита и времена разгона (торможения), должна выполняться с учетом характеристик исполнительного механизма и технологических особенностей его работы;
- для ворот - проверка синхронности запуска, вращения и останова приводных двигателей, работающих в паре. При проверке синхронности валы двигателей должны быть механически отсоединены от нагрузки;
- проверка работоспособности датчиков положений в соответствии с инструкциями по эксплуатации. При проверке датчик должен быть отсоединен от механизма;
- настройка нулей датчиков положения и нагрузки;
- тарировка датчиков положения и нагрузки;
- проверка работоспособности дискретных датчиков и концевых выключателей в соответствии с инструкциями по эксплуатации;
- проверка плавности движения затворов и ворот на малых скоростях во всем диапазоне хода затворов и ворот. Эту проверку необходимо производить на предельно малых скоростях при постоянном визуальном контроле. Управление механизмами при проведении проверок должно производиться только с местных пультов;
- проверка работоспособности приводов механизмов шлюза на штатных скоростях.
13.3 Требования к объему приемосдаточных испытаний
13.3.1 Приемосдаточные испытания должны производиться в соответствии с требованиями разд.3 ГОСТ 24.104.
13.3.2 Перед проведением приемосдаточных испытаний представители заказчика совместно с представителем разработчика СУ должны составить программу приемосдаточных испытаний.
13.3.3 В программу испытаний должны быть включены проверки всех технологических блокировок и защит, которые производятся при ежегодном инспекторском контроле шлюза.
13.3.4 Перед проведением приемосдаточных испытаний представитель заказчика совместно с представителем производителя СУ должен произвести проверку всех блокировок и защит, включенных в программу испытаний. По результатам проверки должен быть составлен акт проверки блокировок и защит с указанием фактических значений положений механизмов, при которых срабатывают блокировки, акт должен быть подписан проверяющими.
13.3.5 Следует исполнять порядок действий по приемке СУ в эксплуатацию, изложенный в 3.7 ГОСТ 24.104.
14 Требования к объему конструкторской и эксплуатационной документации
14.1 На этапе изготовления СУ
14.1.1 Состав и объем проектной документации в целом должен определяться требованиями ГОСТ 34.201.
14.1.2 На этапе изготовления СУ в состав конструкторской документации должны входить:
- схемы электрические принципиальные;
- чертежи расположения приборов внутри шкафа и внешних видов шкафов;
- чертежи нестандартных изделий;
- монтажные чертежи шкафов;
- спецификации;
- схемы электрические соединений;
- схемы (таблицы) соединений и подключений внешних проводок;
- кабельные журналы;
- схемы размещения оборудования в помещениях устоев и на территории шлюза;
- технологические карты и инструкции по сборке изделий, входящих в состав СУ;
- сертификаты на поставляемое в составе СУ оборудование и комплектующие материалы;
- бланки протоколов проверки сигналов;
- паспорта и инструкции на покупные комплектующие.
14.2 На этапе монтажа и промышленной эксплуатации СУ
14.2.1 Техническая документация, используемая при монтаже оборудования, должна включать комплектовочные, отправочные, маркировочные схемы узлов и деталей, технические условия или инструкции по монтажу, проект производства работ, технические паспорта, а также акты на контрольную сборку и выполнение заводских испытаний оборудования.
14.2.2 В состав эксплуатационной документации должны входить:
- ведомость эксплуатационных документов;
- чертежи кронштейнов, необходимых для установки датчиков;
- схемы внешних подключений;
- кабельные журналы;
- схемы размещения оборудования в помещениях устоев и на территории шлюза;
- спецификация аппаратных средств СУ;
- ведомость машинных носителей информации;
- инструкция по формированию и ведению базы данных доступа пользователей;
- утвержденный алгоритм работы СУ;
- руководство по эксплуатации СУ;
- паспорта на аппаратные средства, входящие в состав СУ;
- инструкция по регламентному обслуживанию СУ;
- инструкция по оперативным переключениям;
- карта настроек технологических параметров СУ;
- инструкция инженера;
- инструкция оператора.
Библиография
[1] | СНиП 33-01-2003 Гидротехнические сооружения. Основные положения |
[2] | Правила устройства электроустановок (Пуэ). Издание 7 |
Электронный текст документа
и сверен по:
, 2012
{kind=link}