ФЕДЕРАЛЬНОЕ АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ

НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ГОСТ Р
71603—
2024
(ИСО 21815-1:2022)
Оборудование горно-шахтное
ПРЕДУПРЕЖДЕНИЕ И ПРЕДОТВРАЩЕНИЕ СТОЛКНОВЕНИЙ
Общие требования
(ISO 21815-1:2022 Earth-moving machinery —
Collision warning and avoidance — Part 1: General requirements, MOD)
Издание официальное
Москва Российский институт стандартизации 2024
ГОСТ Р 71603—2024
Предисловие
1 ПОДГОТОВЛЕН Акционерным обществом «Научный центр ВостНИИ по промышленной и экологической безопасности в горной отрасли» (АО «НЦ ВостНИИ») на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 269 «Горное дело»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 11 сентября 2024 г. № 1201-ст
4 Настоящий стандарт является модифицированным по отношению к международному стандарту ИСО 21815-1:2022 «Машины землеройные. Предупреждение и предотвращение столкновений. Часть 1. Общие требования» (ISO 21815-1:2022 «Earth-moving machinery — Collision warning and avoidance — Part 1: General requirements», MOD) путем внесения технических отклонений, объяснение которых приведено во введении к настоящему стандарту и которые выделены по тексту курсивом, а также путем изменения его структуры для приведения в соответствие с правилами, установленными в ГОСТ 1.5—2001 (подразделы 4.2 и 4.3).
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5—2012 (пункт 3.5).
Сведения о соответствии ссылочных межгосударственных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте, приведены в дополнительном приложении ДА.
Сопоставление структуры настоящего стандарта со структурой указанного международного стандарта приведено в дополнительном приложении ДБ
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
© ISO, 2022 ©Оформление. ФГБУ «Институт стандартизации», 2024
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
II
ГОСТ Р 71603—2024
Содержание
1 Область применения..................................................................1
2 Нормативные ссылки..................................................................1
3 Термины и определения................................................................2
4 Эксплуатационные требования..........................................................3
4.1 Общие требования.............................................................3
4.2 Требования к системе CxS.......................................................4
4.3 Схема процесса для системы CxS.................................................5
4.4 Ложные действия системы CxS...................................................6
4.5 Переход в рабочее состояние системы CxS.........................................6
4.6 Самоконтроль, индикация состояния и предупреждение о неисправностях...............7
4.7 Защита от несанкционированного изменения функций системы........................8
5 Классификация систем................................................................8
5.1 Общие положения..............................................................8
5.2 Типы функций системы..........................................................8
5.3 Типы систем...................................................................8
5.4 Типы обнаружения..............................................................9
5.5 Описание систем...............................................................9
6 Методы испытаний....................................................................9
6.1 Общие требования.............................................................9
6.2 Условия проведения испытаний...................................................9
6.3 Требования к испытуемой машине................................................9
6.4 Технические характеристики объектов испытаний...................................10
6.5 Эксплуатационные испытания...................................................10
6.6 Испытание на ложноположительное действие системы CxS..........................10
7 Информация по использованию системы CxS.............................................10
7.1 Информация для оператора.....................................................10
7.2 Информация об остаточных рисках...............................................10
Приложение А (справочное) Сравнение функций системы....................................11
Приложение В (справочное) Общие примеры сценариев взаимодействия машин.................12
Приложение С (справочное) Пример руководства оператора..................................14
Приложение ДА (справочное) Сведения о соответствии ссылочных межгосударственных
стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте...................................16
Приложение ДБ (справочное) Сопоставление структуры настоящего стандарта со структурой примененного в нем международного стандарта..............................17
Библиография........................................................................18
III
ГОСТ Р 71603—2024
Введение
В настоящий стандарт включены дополнительные по отношению к ИСО 21815-1:2022 положения, отражающие особенности объекта стандартизации, характерные для Российской Федерации, а именно:
- вместо ссылок на международные стандарты в настоящем стандарте использованы ссылки на гармонизированные с ними национальные или межгосударственные стандарты (12 источников);
- из нормативных ссылок перенесены в библиографию стандарты, не имеющие национальных или межгосударственных аналогов (4 источника);
- из библиографии исключены ссылки на зарубежные стандарты, соответствующие аналогичным национальным или межгосударственным стандартам, приведенным в настоящем стандарте (5 источников).
Другие положения настоящего стандарта идентичны положениям ИСО 21815-1:2022. При изложении настоящего стандарта введены некоторые изменения, не затрагивающие его основных нормативных положений.
Настоящий стандарт относится к стандарту типа С согласно определению ГОСТ ISO 12100-1.
Если положения настоящего стандарта типа С отличаются от положения стандартов типа А или В, то приоритетом обладает стандарт типа С для машин, которые сконструированы и построены в соответствии с положениями стандарта типа С.
IV
ГОСТ Р 71603—2024 (ИСО 21815-1:2022)
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Оборудование горно-шахтное
ПРЕДУПРЕЖДЕНИЕ И ПРЕДОТВРАЩЕНИЕ СТОЛКНОВЕНИЙ
Общие требования
Mining equipment.
Collision warning and avoidance.
General requirements
Дата введения — 2024—12—01
1 Область применения
Настоящий стандарт содержит терминологию и общие рекомендации по принципам систем предупреждения и предотвращения столкновений мобильных машин для подземных горных работ, как определено в ГОСТ Р 70298.
Настоящий стандарт устанавливает общие требования к обнаружению объектов, предупреждениям для оператора, автоматическому управлению вмешательством во избежание столкновения и к процедурам испытаний. Он предназначен для использования в сочетании с другими частями серии стандартов, в которых будут установлены подробные рекомендации и требования к системам предупреждения и предотвращения столкновений, а также определены области и уровни риска для конкретных типов машин.
В настоящем стандарте рассматривается предотвращение столкновений за счет снижения скорости или запрета движения и не включено рассмотрение ситуаций предотвращения с помощью автоматического маневрирования (например, путем поворота руля) от предполагаемого объекта.
Системы, описанные в настоящем стандарте, предназначены только для помощи оператору машины, несущему ответственность за ее безопасную эксплуатацию.
Принципы настоящего стандарта и большинство его положений могут быть применены и к строительно-дорожным машинам в соответствии с ГОСТ Р ИСО 6165 (см. также [1]).
Настоящий стандарт не распространяется на системы предупреждения и предотвращения столкновений, установленные на машине до даты его публикации.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ ISO 6011—2017 Машины землеройные. Средства отображения информации о работе машины
ГОСТ ISO 10265 Машины землеройные. Машины на гусеничном ходу. Эксплуатационные требования и методы испытаний тормозных систем
ГОСТ ISO 12100—2013 Безопасность машин. Основные принципы конструирования. Оценки риска и снижения риска
ГОСТ ISO 13849-1 Безопасность оборудования. Элементы систем управления, связанные с безопасностью. Часть 1. Общие принципы конструирования
Издание официальное
1
ГОСТ Р 71603—2024
ГОСТ ISO 15998 Машины землеройные. Системы управления с использованием электронных компонентов. Критерии эффективности и испытания на функциональную безопасность
ГОСТ ISO 16001 Машины землеройные. Системы обнаружения опасности и визуальной помощи. Требования к рабочим характеристикам и методы испытаний
ГОСТ Р 70298 (ИСО 19296:2018) Оборудование горно-шахтное. Самоходные машины для подземных горных работ. Требования безопасности
ГОСТ Р ИСО 6165 Машины землеройные. Классификация. Термины и определения
ГОСТ Р ИСО 20474-1 Машины землеройные. Безопасность. Часть 1. Общие требования
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя «Национальные стандарты» за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ ISO 12100, а также следующие термины с соответствующими определениями:
3.1 взаимодействие (interaction): Ситуация, когда машина сталкивается с предполагаемым объектом при движении или в начале движения, что создает опасность для машины или оператора или подвергает опасности предполагаемые объекты.
3.2 предупреждение (warning): Передача информации о предупреждении с помощью визуальных, звуковых или других средств передачи сигналов.
Примечание — Предупреждение предназначено как для оператора, так и для людей, находящихся в непосредственной близости от машины.
3.3 действия по уклонению (evasive action): Действия, предпринимаемые оператором в попытке предотвратить или избежать предсказуемого столкновения.
Пример — Торможение, рулевое управление.
3.4 действие по предотвращению аварийного столкновения (interventional collision avoidance action): Автоматическое действие, инициированное системой предотвращения столкновений, чтобы попытаться предотвратить или избежать предсказуемого столкновения.
Пример — Торможение, запрещение движения, замедление.
3.5 предполагаемый объект (intended object): Объект, такой как человек, машина, транспортное средство или препятствие, который предполагается обезопасить с помощью системы предупреждения столкновения или системы предотвращения столкновения, когда он находится в зоне риска столкновения.
3.6 уровень риска столкновения (collision risk level): Значение, присваиваемое каждому предполагаемому объекту рпя определения того, является ли столкновение прогнозируемым.
Примечание — Уровни риска столкновения приведены в [2], где рассмотрены зоны и уровни риска для движения по прямому пути, а также при поворотах и вращениях.
3.7 зона риска столкновения (collision risk area): Пространство, анализируемое для определения уровня риска столкновения.
3.8 система предупреждения столкновений; CWS (collision warning system, CWS): Система, которая обнаруживает предполагаемые объекты в зоне риска столкновения, определяет уровень риска столкновения и выдает предупреждение оператору.
2
ГОСТ Р 71603—2024
3.9 система предотвращения столкновений; CAS (collision avoidance system, CAS): Система, которая обнаруживает предполагаемые объекты в зоне риска столкновения, определяет уровень риска столкновения и обеспечивает принятие действий по предотвращению столкновения.
3.10 система CxS: Система предупреждения о столкновении (CWS) или система предотвращения столкновения (CAS), или система, обеспечивающая и то и другое.
3.11 обнаружение (detection): Подтверждение предполагаемых объектов со стороны системы CxS.
3.12 действие системы CxS (CxS action): Система предупреждения о столкновении, предоставляющая предупреждение оператору, или система предотвращения столкновения, принимающая действия по предотвращению столкновения.
3.13 ложноположительное действие системы CxS (false positive CxS action): Ненужное или неуместное действие системы CxS.
Примечание — Это может быть вызвано неправильным определением уровня риска столкновения.
3.14 ложноотрицательное действие системы CxS (false negative CxS action): Отсутствие необходимых или соответствующих действий системы CxS.
Примечание — Это может быть вызвано неправильным определением уровня риска столкновения.
3.15 устройство системы CxS: Устройство с датчиками, выполняющее функции системы CxS для обнаружения предполагаемых объектов вблизи машины для определения уровня риска столкновения, предупреждения оператора о наличии предполагаемого объекта для системы предупреждения столкновения и/или подачи сигналов в систему управления машиной через интерфейс связи для инициирования соответствующих действий по предотвращению столкновения на машине для системы предотвращения столкновения.
Примечание — Система обнаружения приближения (Proximity detection system, PDS) — это разговорный промышленный термин для физического устройства, обеспечивающего функциональность систем CWS или С AS.
3.16 нормальный режим (normal mode): Рабочий режим, при котором система CxS активна и готова обеспечить все функции данной системы, включая информацию по предупреждению и действие по предотвращению столкновения.
3.17 режим ожидания (готовности к работе) (stand-by mode): Рабочий режим, выбранный уполномоченным лицом, при котором система CxS может быть активна, но информация предупреждения или действия по предотвращению столкновения или и то и другое не предоставляются системой, и возврат в нормальный режим осуществляется уполномоченным лицом.
3.18 режим блокировки (override mode): Режим работы, выбранный оператором, при котором система CxS может быть активной, но предупреждение или действие по предотвращению столкновения или и то и другое временно приостанавливается и автоматически возвращается в нормальный режим после определенного условия.
3.19 системный интегратор (system integrator): Организация, которая обеспечивает функционирование всей системы путем интеграции машины, интерфейса и устройств системы CxS.
4 Эксплуатационные требования
4.1 Общие требования
4.1.1 Общие положения
Машины и системы должны соответствовать требованиям безопасности и/или мерам защиты/ снижения риска, изложенным в настоящем стандарте. Кроме того, машины и системы должны быть спроектированы в соответствии с принципами, приведенными в ГОСТ ISO 12100 для характерных, но не существенных опасностей, которые не рассматриваются в настоящем стандарте.
В настоящем стандарте определяются принципы работы, основные функциональные возможности, требования к системе и общие требования к испытаниям систем предупреждения и предотвращения столкновений.
Настоящий стандарт не предназначен для того, чтобы требовать подключения устройств системы CxS к машине по принципу «plug-and-play». Технические детали, не описанные в настоящем стандарте,
3
ГОСТ Р 71603—2024
должны быть согласованы между изготовителем устройства системы CxS, изготовителем машины и системным интегратором, в зависимости от конкретной ситуации.
4.1.2 Электромагнитная совместимость (ЭМС)
Устройство системы CxS, обеспечивающее возможность применения системы CWS, должно отвечать установленным требованиям по ЭМС (см. [3]). Устройство системы CxS, обеспечивающее возможность использования системы CAS, должно соответствовать нормативным документам (см. [3] и [4]). Испытания на ЭМС устройства системы CxS могут быть проведены с помощью устройства системы CxS в качестве электронного узла или устройства системы CxS, встроенного в машину.
Примечание — Добавление устройства системы CxS может негативно повлиять на соответствие машины требованиям, приведенным в [3] и [4], и может потребовать проведения повторной оценки машины, оснащенной системой CxS.
4.1.3 Требования к состоянию окружающей среды
Элементы устройства системы CxS, обеспечивающего возможность применения системой CAS, связанные с безопасностью и идентифицированные согласно ГОСТ ISO 13849-1 (см. также [5]), должны соответствовать установленным требованиям (см. также [6]).
4.1.4 Функциональная безопасность
Использование устройства системы CxS должно быть проанализировано посредством проведения оценки риска.
Применение устройства системы CxS с возможностью использования систем CWS или CAS не должно негативно влиять на достигнутый уровень эффективности системы управления безопасностью исходной машины (см. также [5], [6]) в соответствии с ГОСТ ISO 15998 и ГОСТ ISO 13849-1.
Примечание — Использование устройства системы CxS может потребовать проведения комбинированной повторной оценки машины.
4.1.5 Оценка риска
Оценка риска для машины, оснащенной устройством системы CxS, должна быть выполнена системным интегратором в соответствии с принципами по ГОСТ ISO 12100. Все выявленные риски должны быть снижены до приемлемого уровня риска в рамках процесса оценки риска. Результаты оценки риска должны быть официально задокументированы.
4.1.6 Анализ модификации машины
Применение устройства системы CxS требует проведения анализа, так как оно может негативно повлиять на безопасность и эксплуатационные характеристики используемой машины (руководство можно найти в ГОСТ Р ИСО 20474-1, ГОСТ Р 70298).
4.2 Требования к системе CxS
4.2.1 Общие положения
Система CxS должна обнаруживать предполагаемые объекты (например, людей, другие машины, транспортные средства и препятствия) в зоне риска столкновения и функционировать следующим образом:
- в качестве системы CWS, чтобы предупредить оператора о необходимости удерживать машину в неподвижном состоянии при наличии предполагаемого объекта или немедленно предпринять действия по уклонению от столкновения;
- в качестве системы CAS, чтобы обеспечить такие действия по предотвращению столкновения, которые не требуют вмешательства оператора.
Примечания
1 Зоны риска столкновения могут находиться впереди, рядом или позади на пути движения машины. Для экскаваторов и других машин, у которых все части или часть машины могут вращаться, зона риска также включает ту зону, в которой машина может вращаться.
2 Система CxS не обязательно включает в себя всю область движения, по которой машина может перемещаться.
3 Система CAS может также предупреждать оператора.
4.2.2 Обнаружение предполагаемых объектов
В зависимости от типа машины и типа объекта, который должен быть обнаружен, используется разная технология обнаружения. Краткое описание существующих систем обнаружения объектов ODS (object detection system) приведено в [7] (приложение А).
4
ГОСТ Р 71603—2024
Технологии должны быть выбраны и, при необходимости, объединены в соответствии с концепцией проектирования системы CxS с учетом преимуществ и недостатков различных технологий, сравнение функций которых приведено в приложении А.
4.2.3 Уровни риска столкновений и действия системы CxS
Система CxS должна определить уровень риска столкновения на основе информации об обнаружении предполагаемых объектов и условий эксплуатации машины и обеспечить по крайней мере одно из действий системы CxS:
- предупреждающий сигнал оператору (система CWS);
-действие по предотвращению столкновения (система CAS).
Действия по предотвращению столкновений, обеспечиваемые системой CxS, зависят от того, какие функции установлены в системе. Критерии оценки уровня риска столкновения и действия по предотвращению столкновения определены типом машины (например, самосвал, бульдозер, гидравлические экскаваторы и др.).
4.2.4 Системные ограничения
Системы предупреждения и предотвращения столкновений, имеющие ограниченные возможности (например, предельную скорость и дистанцию), могут иметь различные пределы использования с учетом практического опыта. Ограничения для каждого случая должны быть указаны в руководстве оператора.
Требования к ограничениям для каждого отдельного случая приведены в руководстве оператора (см. 7.1).
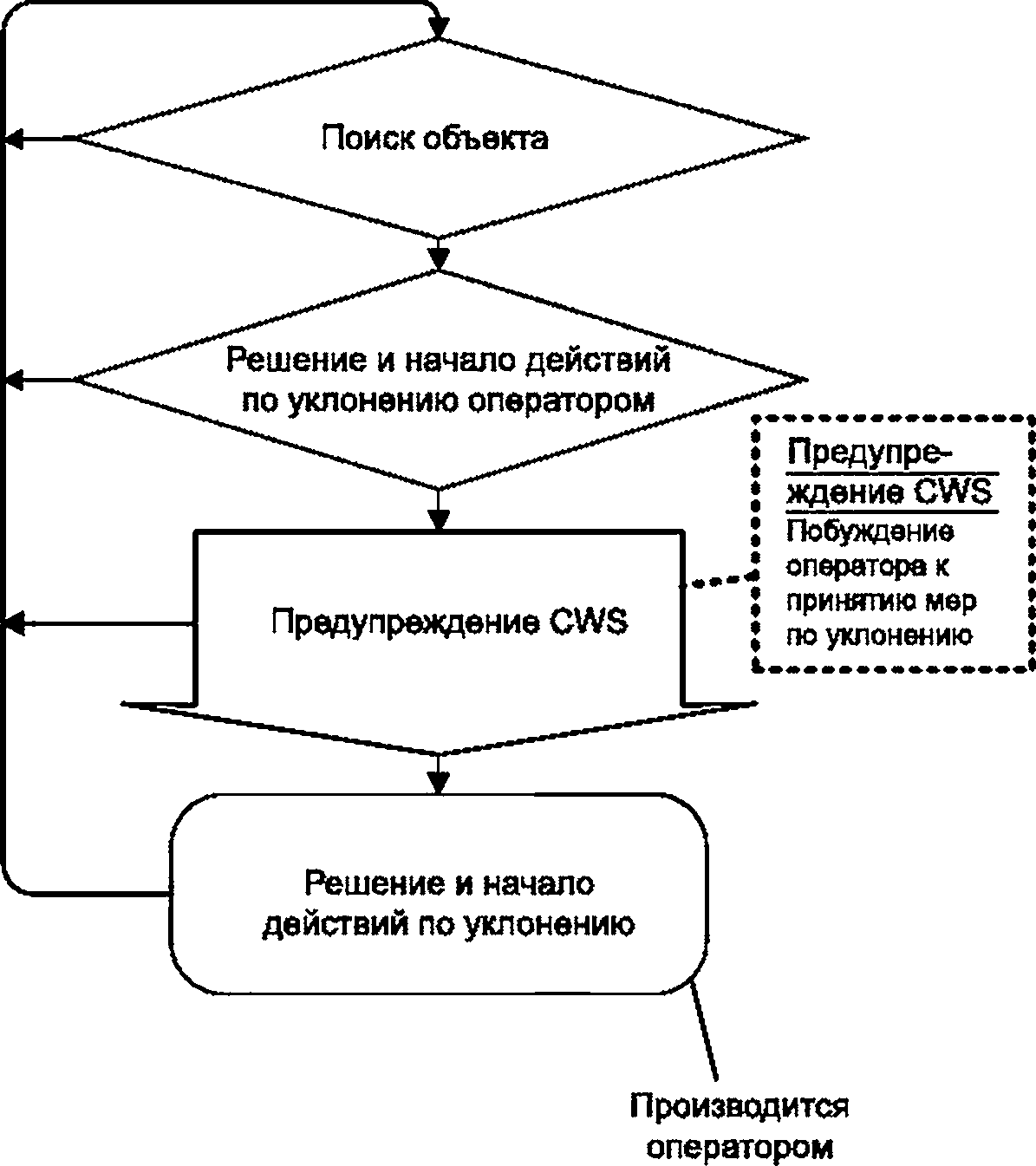
4.3 Схема процесса для применения системы CxS
Система CWS осуществляет поиск предполагаемых объектов в зоне риска столкновения и подтверждает их наличие. При обнаружении предполагаемого объекта система CWS выдает предупреждение оператору в соответствии с уровнем риска столкновения.
Система CAS выполняет поиск предполагаемых объектов в зоне риска столкновения и подтверждает их наличие. При обнаружении предполагаемого объекта система CAS принимает меры по предотвращению столкновения в соответствии с уровнем риска столкновения.
В схеме процесса, представленного на рисунке 1, в качестве примера действия системы CxS использовано торможение.
5
ГОСТ Р 71603—2024
Система предупреждения столкновений (CWS)
Система предотвращения столкновений (CWS)
Поиск объекта
Определение уровня
риска столкновения и реше
ние о предупреждении
Действие CAS
Автоматическое нажатие тормоза
Активация тормоза
Передача сигнала
и механическое воздействие
на машину
Продолжение активации тормоза
Остановка или замедление (состояние низкого риска)
Рисунок 1 — Пример процессов высокого уровня действия систем CWS и CAS
Команда CAS для автоматического торможения
В случае отсутствия действий по уклонению или недостаточных действий со стороны оператора
Производится машиной
4.4 Ложные действия системы CxS
Необходимо минимизировать как ложноположительные, так и ложноотрицательные действия системы CxS.
4.5 Переход в рабочее состояние системы CxS
4.5.1 Общие положения
Система CxS может иметь различные рабочие режимы: нормальный режим, режим ожидания и режим блокировки. На рисунке 2 описан пример перехода системы CxS в рабочее состояние.
6
ГОСТ Р 71603—2024
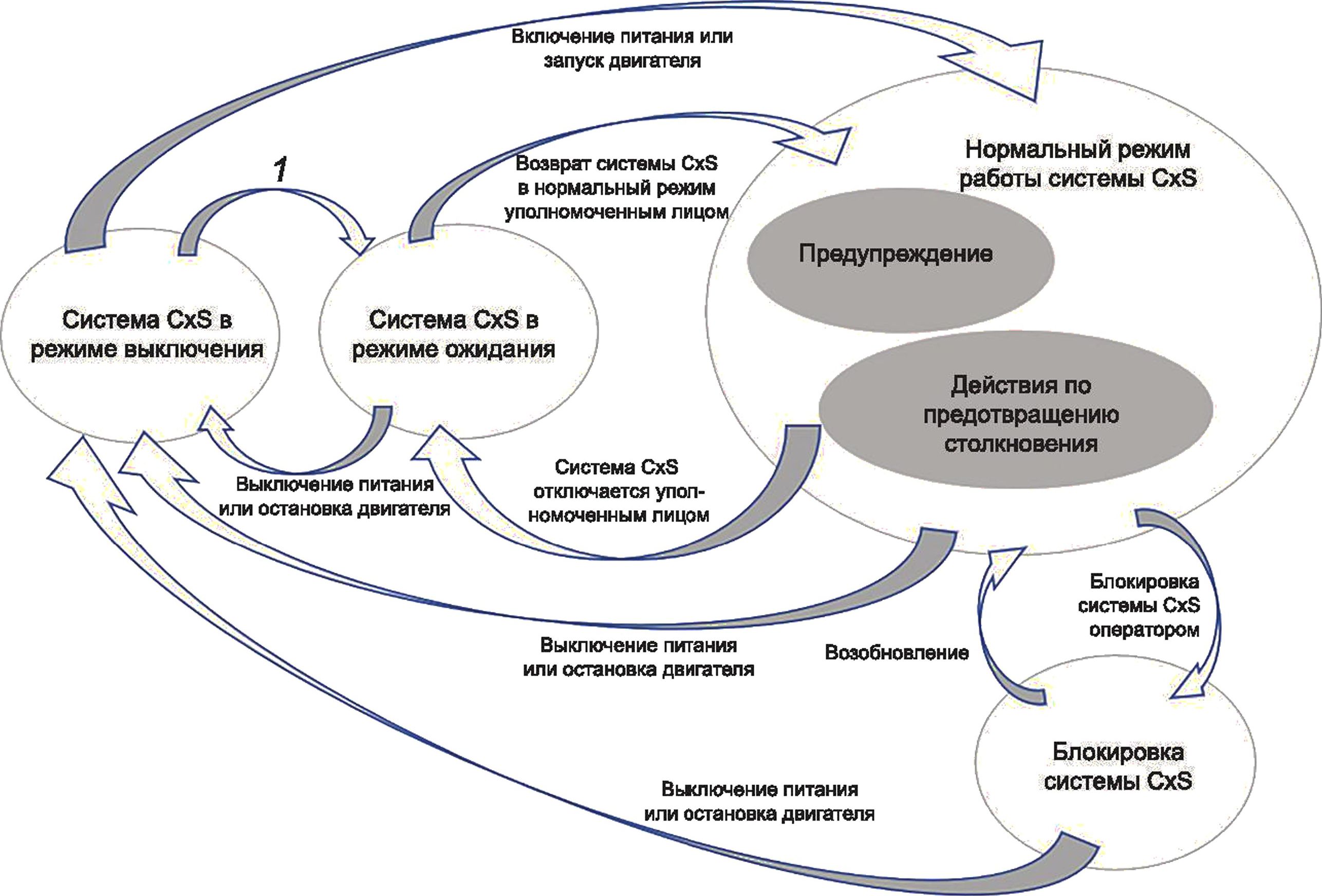
1 — включение питания или запуск двигателя в режиме ожидания, выбранном уполномоченным лицом
Рисунок 2 — Пример диаграммы переходов системы CxS
4.5.2 Переключение между нормальным режимом и режимом ожидания
Если система CxS оснащена режимом ожидания (отключение CxS), это должно быть преднамеренным действием уполномоченного лица. Для включения режима ожидания система CxS должна требовать средства аутентификации (например, пароль, ключ).
Система CxS не должна автоматически переходить в режим ожидания.
По умолчанию система CxS при запуске машины должна переходить в нормальный режим.
4.5.3 Переключение между нормальным режимом и режимом блокировки
Если машина оснащена средством для перевода системы CxS в режим блокировки, то для включения режима блокировки требуется преднамеренное действие оператора, так как:
- система CxS не должна автоматически переключаться в режим блокировки;
- по умолчанию система CxS должна запускаться в нормальном режиме при запуске машины;
- непреднамеренное пребывание в режиме блокировки должно быть невозможным.
4.5.4 Информация о состоянии
Оператору должна быть предоставлена непрерывная индикация состояния рабочего режима системы CxS. Метод индикации должен соответствовать принципам ГОСТ ISO 6011.
4.6 Самоконтроль, индикация состояния и предупреждение о неисправностях
При включении питания система CxS должна выполнить начальную проверку системы. Во время первоначальной проверки индикация системы должна показывать ее состояние. После завершения первоначальной проверки системы индикация должна отражать надлежащее функционирование системы. В процессе эксплуатации система должна проводить самодиагностику с частотой, определяемой оценкой риска, осуществляемой изготовителем. Когда система CxS обнаруживает потерю своей функции, она должна информировать об этом оператора. Если обнаруживается, что система CxS недоступна из-за того, что она находится вне установленных пределов ее эксплуатации (например, скоро-
7
ГОСТ Р 71603—2024
сти), оператор должен быть проинформирован о происходящем. Метод индикации рабочего состояния должен соответствовать принципам, приведенным в ГОСТ ISO 6011.
4.7 Защита от несанкционированного изменения функций системы
Система CxS должна быть разработана таким образом, чтобы предотвратить несанкционированную модификацию ее внутренних параметров или программного обеспечения.
Пример — Защита от несанкционированной модификации, например с помощью паролей, ключевых замков.
5 Классификация систем
5.1 Общие положения
Система CxS может работать как в режиме системы CWS, так и в режиме системы CAS или в обоих режимах. Системы могут быть построены для обеспечения множества различных возможностей, включая дополнительные возможности, которые не перечислены. В приложении В описаны общие примеры сценариев взаимодействия машин.
5.2 Типы функций системы
Существует четыре типа функций системы CxS: запрет старта (TIC), запрет поворота (SIC), скорость маневрирования (MSC) и скорость движения (TSC).
5.2.1 Запрет старта (TIC)
Функция TIC системы CxS определяет уровень риска столкновения перед началом движения (например, вперед, назад) с последующим обеспечением действия системы CxS. Система CAS блокирует движение машины.
Примечания
1 Типичными машинами являются самосвал, грейдер, колесный погрузчик, экскаватор-бульдозер.
2 Запрет движения предотвращает движение машины из неподвижного состояния.
5.2.2 Запрет поворота (SIC)
Функция SIC системы CxS определяет уровень риска столкновения перед началом поворота (например, вращения) и обеспечивает последующую блокировку системой CAS.
Примечания
1 Типичными машинами являются экскаваторы и экскаваторы-погрузчики.
2 Запрет движения предотвращает движение машины из неподвижного состояния.
5.2.3 Скорость маневрирования (MSC)
Функция MSC системы CxS определяет уровень риска столкновения на низких скоростях маневрирования (например, менее 10 км/ч) и обеспечивает соответствующие действия системы CxS. MSC должна работать во всех возможных направлениях движения (например, вперед, назад). Система CxS может быть спроектирована только для работы на скоростях ниже скорости маневрирования.
Примечание — Типичными машинами являются самосвалы, грейдеры, колесные погрузчики, бульдозеры, экскаваторы.
5.2.4 Скорость движения (TSC)
Функция TSC системы CxS определяет уровень риска столкновения при высокой скорости движения и обеспечивает соответствующие действия системы CxS. Система может быть рассчитана на работу только на скоростях выше скорости маневрирования (например, выше 10 км/ч) и только в прямом направлении.
Примечание — Типичными машинами являются самосвалы, грейдеры, колесные погрузчики.
5.3 Типы систем
Существует два типа систем CxS: CWS и CAS.
8
ГОСТ Р 71603—2024
Примечание — Система CxS может обеспечивать как предупреждающие, так и предотвращающие действия.
5.4 Типы обнаружения
Система CxS может пассивно обнаруживать (например, камера, радар) предполагаемые объекты, которые не оснащены приборами, или может потребоваться оснащение предполагаемого объекта приборами [например, для радиочастотной идентификации (RFID)].
5.5 Описание систем
Системы CxS могут быть описаны путем объединения нескольких классификаций.
Примечания
1 Обеспечивает предупреждение и предотвращение столкновений при старте для предполагаемых объектов больших машин, малых транспортных средств и человека с помощью пассивной системы.
2 Обеспечивает уклонение при маневрировании, когда предполагаемый объект оборудован приборами.
6 Методы испытаний
6.1 Общие требования
Системный интегратор должен проводить испытания на основе технической информации, предоставленной изготовителями машины и устройства системы CxS. Описанные в данном разделе методы испытаний обеспечивают минимальные требования, предъявляемые к системам CxS в типичных рабочих ситуациях, и не отражают всех ситуаций в любых условиях.
Методы испытаний определяют условия испытаний, чтобы гарантировать, что процесс можно повторить для получения стабильных результатов. В соответствии с технологией обнаружения, типом землеройной техники с системой и формой объекта устанавливают методы испытаний.
Условия проведения испытаний должны быть зарегистрированы.
6.2 Условия проведения испытаний
6.2.1 Состояние окружающей среды при испытании
Не должно быть осадков, влияющих на проведение испытаний.
Пример — Дождь, снег, снегопад, град.
Не должно быть ветра, достаточно сильного, чтобы повлиять на результаты испытаний.
Температура окружающей среды во время испытания должна быть в пределах рабочего диапазона испытуемой машины и устройств системы CxS.
Системный интегратор может разработать испытание на основе информации о состоянии окружающей среды, предоставленной изготовителем устройств системы CxS и изготовителем машины.
6.2.2 Условия испытательной площадки
Поверхность для испытания должна представлять собой твердую, сухую поверхность с плотно утрамбованным основанием, при этом влажность грунта может присутствовать в той степени, в которой она не оказывает негативного влияния на испытание. Испытательная поверхность не должна иметь уклон более 3 % под прямым углом к направлению движения.
Уклон в направлении движения должен составлять не более 1 % или соответствовать требованиям, предъявляемым к проводимому испытанию.
6.3 Требования к испытуемой машине
Конструкция испытуемой машины должна соответствовать установленным требованиям (см., например, 5.4 [8]).
Для испытуемых машин, не входящих в область применения [8], следует использовать испытательную систему применимых стандартов по торможению или безопасности ГОСТ Р 70298, ГОСТ ISO 10265 (см. также [9]).
9
ГОСТ Р 71603—2024
6.4 Технические характеристики объектов испытаний
Объектом испытания может быть реальный предполагаемый объект или заменяющий его объект с эквивалентными результатами обнаружения, как у реального предполагаемого объекта. Если в процедуре испытания предусмотрен риск столкновения, испытательный объект может быть заменен на другой испытательный объект. Даже если выбран один замещающий тест-объект, результаты могут отличаться в зависимости от используемой системы обнаружения. Поэтому следует применять метод, подходящий для воспроизведения характеристик объекта испытания.
Данные относительно объекта испытаний должны быть внесены в протокол.
6.5 Эксплуатационные испытания
6.5.1 Общие положения
Испытания следует проводить в условиях, определенных в 6.5. Результаты должны быть зарегистрированы для выполнения оценки. Испытание проводят не менее трех раз для каждого условия испытания, как указано в 6.3 и 6.4.
6.5.2 Установка объекта испытания
Метод установки, ориентация и перемещение объекта испытания должны быть детально определены.
6.5.3 Испытуемая машина
Для испытуемой машины должны быть определены условия эксплуатации, основанные на ограничениях системы CxS. Условия эксплуатационных испытаний испытуемой машины должны максимально точно имитировать реальные условия эксплуатации в безопасных пределах. Когда испытуемая машина проходит испытания в режиме движения, должно быть использовано определенное изготовителем машины положение движения.
6.5.4 Критерии оценки результатов испытания
Необходимо определить, были ли достигнуты критерии оценки. Критерии оценки могут быть установлены системным интегратором при данном состоянии машины на основе информации, предоставленной машиной и/или изготовителем устройств системы CxS. Использование критериев оценки должно гарантировать в отношении того, что система CxS направляет предупреждение оператору, активирует действия по предотвращению столкновения и/или останавливает машину до столкновения с объектом испытания, или тормозит движение машины при стандартных условиях испытания, описанных в разделе 6.
6.6 Испытание на ложноположительное действие системы CxS
В ходе испытания проверяют, не выдает ли система ненужных предупреждений в условиях испытания на основе определенных ограничений и спецификаций системы, а также ложных предупреждений и ложных действий по предотвращению столкновения, когда риск столкновения не предвидится. Испытание следует проводить для создания имитируемых ситуаций, в которых система может ошибочно определить риск столкновения при его отсутствии.
7 Информация по использованию системы CxS
7.1 Информация для оператора
При поставке машин, оснащенных системой CxS, в комплект сопроводительных документов должно входить руководство оператора, предоставляемое системным интегратором. Системный интегратор должен составить руководство оператора на основе технической информации, предоставленной изготовителем машины и изготовителями устройств системы CxS. Руководство оператора должно содержать технические инструкции и инструкции по безопасности и ограничения по использованию, направленные на объяснение предполагаемого применения системы в соответствии с ГОСТ ISO 12100—2013 (6.4.5). В приложении С приведены примеры информации.
7.2 Информация об остаточных рисках
Оценку рисков при интеграции устройств системы CxS в машину следует проводить в соответствии с принципами, приведенными в ГОСТ ISO 12100. Информация об остаточных рисках должна быть приведена в документации по эксплуатации машины.
10
ГОСТ Р 71603—2024
Приложение А (справочное)
Сравнение функций системы
В данном приложении описывают различия между системой CxS и другими системами, определенными в [7]:
- система обеспечения видимости (VA) предоставляет только визуальную информацию, но не предупреждающий сигнал;
- система обнаружения объектов (ODS) не имеет алгоритма для определения уровня риска столкновения, а только подает предупреждающие сигналы при условии, что предполагаемые объекты находятся в зоне обнаружения.
Система CxS имеет соответствующий алгоритм для определения уровня риска столкновения при наличии предполагаемых объектов. Для каждого уровня риска столкновения определяются соответствующие действия системы CxS, включая предупреждения и интервенционные действия по предотвращению столкновения. В таблице А.1 показано сравнение функций системы.
Таблица А.1 — Сравнение систем VA, CDS, CWS, CAS
Наименование показателя | Визуальное средство VA (Visibility aid) (см. [7]) | Система обнаружения объектов ODS (Object detection system) (см. [7]) | Система предупреждения столкновений CWS (Collision warning system) | Система предотвращения столкновений CAS (Collision avoidance system) |
Описание | Обеспечивает непрямую видимость (визуальную информацию) без предупреждения | Обнаруживает предполагаемые объекты; - обеспечивает предупреждения (не определено, когда/что/как обеспечивать предупреждение) | Обнаруживает предполагаемые объекты; - определяет уровни риска столкновения; - выдает соответствующие предупреждения в соответствии с уровнями риска столкновения | Обнаруживает предполагаемые объекты; - определяет уровни риска столкновения; - обеспечивает выполнение соответствующих действий по предотвращению столкновения в зависимости от уровня риска столкновения |
Обнаружение объекта оператором | Оператор при необходимости использует VA | Оператор с учетом применения ODS | Оператор применяет CWS | Оператор применяет CAS |
Определение уровня риска столкновения | Оператор | Оператор | Оператор применяет CWS | Оператор применяет CAS |
Действия по уклонению и вмешательству | Оператор | Оператор | Оператор | Оператор применяет CAS |
Датчики | Нет | Нет (отсутствует способность решать, когда/что/ как делать предупреждения. Это означает отсутствие алгоритма) | Алгоритм для определения уровня риска столкновения | Алгоритм для определения уровня риска столкновения и для принятия мер по предотвращению столкновения |
11
ГОСТ Р 71603—2024
Приложение В (справочное)
Общие примеры сценариев взаимодействия машин
8.1 Общие положения
В данном приложении приведены примеры взаимодействия машин, возникающие в процессе их эксплуатации, с описанием возможных сценариев взаимодействия, разделенные на три категории.
Изготовители могут использовать положения данного приложения для классификации случаев столкновения или для определения предполагаемых объектов и характеристик машины при разработке системы CxS. Сценарии не ограничиваются перечисленными ниже категориями.
В.2 Определения сценариев взаимодействия машин
8.2.1 Старт
Предполагаемый объект находится в зоне риска столкновения вокруг машины-объекта. Испытуемая машина неподвижна и готова к движению (см. рисунок В.1).
Старт
ИМ - испытуемая машина;
0 - предполагаемый объект
Рисунок В.1 — Пример сценария взаимодействия машин (старт)
В.2.2 Движение вперед/назад
Движение испытуемой машины вперед или назад и взаимодействие с предполагаемым объектом в зоне риска столкновения (см. рисунок В.2).
ИМ - испытуемая машина;
0 - предполагаемый объект
Рисунок В.2 — Пример сценария взаимодействия машин (движение вперед/назад)
12
ГОСТ Р 71603—2024
8.2.3 Вращение
Машина с вращающейся конструкцией работает вблизи предполагаемого объекта. Испытуемая машина неподвижна и готова вращаться (см. рисунок В.З), например экскаватор, экскаватор-погрузчик.
ИМ - испытуемая машина;
0 - предполагаемый объект
Рисунок В.З — Пример сценария взаимодействия машин (вращение)
13
ГОСТ Р 71603—2024
Приложение С (справочное)
Пример руководства оператора
В таблице С.1 приведены примеры руководства оператора, содержащего технические инструкции и рекомендации по безопасности, направленные на разъяснение намерений по использованию системы.
Таблица С.1 — Пример содержания руководства оператора
Пункт | Содержание |
Описание работы системы | Оказание помощи оператору машины путем предупреждения о прогнозируемом столкновении и принятие мер по предотвращению столкновения на скорости ниже 10 км/ч, в пределах ограничений системы |
Классификация | Классы, перечисленные ниже, являются примерами предполагаемых объектов, которые должны быть обнаружены системами CWS и CAS: - крупногабаритные машины; - малые транспортные средства; - люди. Примечание — Предполагаемые объекты системы CxS зависят от применения и типа машины. Примеры 1 Обеспечивает предупреждение и предотвращение столкновений при запрете старта крупногабаритных машин, малых транспортных средств и людей с использованием пассивной системы. 2 Обеспечивает систему предупреждения столкновений на скорости маневрирования с использованием измерительной системы |
Диапазон обнаружения (движущийся или стоящий объект) | Описание формы зоны обнаружения объекта и размера для каждой функциональной возможности (функции) должно соответствовать приведенному на рисунке С.1. Рисунок С.1 — Зона обнаружения объекта и ее размер |
Диапазон скоростей, охватываемый системой (при неподвижном предполагаемом объекте) | Скорость движения (TSC): только вперед (без нагрузки) >10 км/ч и <Х км/ч; (номинальная нагрузка) >10 км/ч и <У км/ч. Скорость маневрирования (MSC) при номинальной нагрузке: вперед <10 км/ч; назад <10 км/ч |
Внешние факторы, влияющие на производительность системы и ее ограничение | Пример — Туман, пыль, свет, солнечный свет, темнота, препятствия видимости, состояние местности, полезная нагрузка |
Руководство по эксплуатации | Руководство по эксплуатации системы. Инструкции по безопасной эксплуатации. Инструкции по обращению с оборудованием. Инструкция по эксплуатации при отказе |
Техническое обслуживание | Инструкции по проверке работоспособности. Порядок проведения регулярных проверок работоспособности системы. Мероприятия по противодействию внешним условиям, которые могут повлиять на эффективность работы системы при обнаружении |
14
Окончание таблицы С. 1
ГОСТ Р 71603—2024
Пункт | Содержание |
Инструкция по оборудованию системы | Инструкция по установке и настройке (включая расположение). Требования к электропитанию. Информация об установке (расположение, высота, угол и т. д.). Информация для подключения к другому оборудованию (при необходимости). Подтверждение соответствия нормативным требованиям. Список стран с сертификатом об утверждении типа |
Организация рабочего места | Инструкция по организации рабочего места для использования оборудования (включая подготовку рабочей площадки) |
15
ГОСТ Р 71603—2024
Приложение ДА (справочное)
Сведения о соответствии ссылочных межгосударственных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте
Таблица ДА.1
Обозначение ссылочного межгосударственного, национального стандарта | Степень соответствия | Обозначение и наименование ссылочного международного стандарта |
ГОСТ ISO 12100—2013 | IDT | ISO 12100:2010 «Безопасность машин. Основные принципы конструирования. Оценки риска и снижения риска» |
ГОСТ ISO 13849-1—2014 | IDT | ISO 13849-1:2015 «Безопасность оборудования. Элементы систем управления, связанные с безопасностью. Часть 1. Общие принципы конструирования» |
Примечание — В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT — идентичные стандарты. | ||
16
ГОСТ Р 71603—2024
Приложение ДБ (справочное)
Сопоставление структуры настоящего стандарта со структурой примененного в нем международного стандарта
Таблица ДБ.1
Структура настоящего стандарта | Структура международного стандарта ISO 21815-1:2022 | ||
Приложения | В | Приложения | А |
А | В | ||
С | С | ||
ДА | — | ||
ДБ | — | ||
Примечание — Сопоставление структуры стандартов приведено начиная с приложения А, т. к. предыдущие разделы стандартов и их иные элементы (за исключением предисловия) идентичны. | |||
17
ГОСТ Р 71603—2024
Библиография | |
[1] ИСО 22242 | Оборудование и машины для строительства и технического обслуживания дорог. Основные типы. Идентификация и описание (Road construction and road maintenance machinery and equipment — Basic types — Identification and description) |
[2] ИСО 21815-3 | Машины землеройные. Предупреждение и предотвращение столкновений — Часть 3. Общая зона риска и уровень риска (Earth-moving machinery — Collision warning and avoidance — Part 3: General risk area and risk level) |
[3] ИСО 13766-1:2018 | Машины землеройные и строительные. Электромагнитная совместимость (ЭМС) машин с внутренним источником электропитания. Часть 1. Общие требования ЭМС для типичной электромагнитной окружающей обстановки [Earth-moving and building construction machinery — Electromagnetic compatibility (EMC) of machines with internal electrical power supply — Part 1: General EMC requirements under typical electromagnetic environmental conditions] |
[4] ИСО 13766-2:2018 | Машины землеройные и строительные. Электромагнитная совместимость (ЭМС) машин с внутренним источником электропитания. Часть 2. Дополнительные требования ЭМС к функциональной безопасности [Earth-moving and building construction machinery — Electromagnetic compatibility (EMC) of machines with internal electrical power supply — Part 2: Additional EMC requirements for functional safety] |
[5] ИСО 19014-1 | Машины землеройные. Функциональная безопасность. Часть 1. Методология определения частей систем контроля, связанных с обеспечением безопасности, и требования к рабочим характеристикам (Earth-moving machinery — Functional safety — Part 1: Methodology to determine safety-related parts of the control system and performance requirements) |
[6] ИСО 19014-3 | Машины землеройные. Функциональная безопасность Часть 3. Экологические характеристики и требования к испытаниям электронных и электрических компонентов, используемых в связанных с безопасностью частях системы управления (Earth-moving machinery — Functional safety — Part 3: Environmental performance and test requirements of electronic and electrical components used in safety-related parts of the control system) |
[7] ИСО 16001:2017 | Машины землеройные. Системы обнаружения опасности и визуальной помощи. Требования к рабочим характеристикам и испытания (Earth-moving machinery — Object detection systems and visibility aids — Performance requirements and tests) |
[8] ИСО 3450:2011 | Машины землеройные. Колесные или высокоскоростные с резиновыми гусеницами машины. Эксплуатационные требования и методики испытаний тормозных систем (Earth-moving machinery. Wheeled or high-speed rubber-tracked machines. Performance requirements and test procedures for brake systems) |
[9] ИСО 18758-2 | Горное и землеройное оборудование. Буровые станки и буровые станки с усилением. Часть 2. Требования безопасности (Mining and earth-moving machinery — Rock drill rigs and rock reinforcement rigs — Part 2: Safety requirements) |
18
ГОСТ Р 71603—2024
УДК 622.6:006.354
ОКС 73.020
Ключевые слова: предупреждение столкновений, предотвращение столкновений, обнаружение, уровень риска столкновений, предполагаемый объект, действия по уклонению
19
Редактор Л. С. Зимилова
Технический редактор И.Е. Черепкова
Корректор М.И. Першина
Компьютерная верстка М.В. Малеевой
Сдано в набор 12.09.2024. Подписано в печать 17.09.2024. Формат 60x847s. Гарнитура Ариал.
Усл. печ. л. 2,79. Уч.-изд. л. 2,37.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении в ФГБУ «Институт стандартизации» , 117418 Москва, Нахимовский пр-т, д. 31, к. 2.
{kind=link}