ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ГОСТ Р ИСО/МЭК 18038— 2023
Информационные технологии
КОМПЬЮТЕРНАЯ ГРАФИКА, ОБРАБОТКА ИЗОБРАЖЕНИЙ И ПРЕДСТАВЛЕНИЕ ДАННЫХ ОБ ОКРУЖАЮЩЕЙ СРЕДЕ
Представление сенсоров в смешанной и дополненной реальности
(ISO/IEC 18038:2020, IDT)
Издание официальное
Москва Российский институт стандартизации 2023
Предисловие
1 ПОДГОТОВЛЕН Обществом с ограниченной ответственностью «Информационно-аналитический вычислительный центр» (ООО ИАВЦ) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 22 «Информационные технологии»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 22 августа 2023 г. № 699-ст
4 Настоящий стандарт идентичен международному стандарту ИСО/МЭК 18038:2020 «Информационные технологии. Компьютерная графика, обработка изображений и представление данных об окружающей среде. Представление сенсоров в смешанной и дополненной реальности» (ISO/IEC 18038:2020 «Information technology — Computer graphics, image processing and environmental representation — Sensor representation in mixed and augmented reality», IDT).
ИСО/МЭК 18038 разработан подкомитетом ПК 24 «Компьютерная графика, обработка изображений и представление данных об окружающей среде» Совместного технического комитета СТК 1 «Информационные технологии» Международной организации по стандартизации (ИСО) и Международной электротехнической комиссии (МЭК)
5 ВВЕДЕН ВПЕРВЫЕ
6 Некоторые положения международного стандарта, указанного в пункте 4, могут являться объектом патентных прав. ИСО и МЭК не несут ответственности за идентификацию подобных патентных прав
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
© ISO, 2020
© IEC, 2020
© Оформление. ФГБУ «Институт стандартизации», 2023
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
Содержание
1 Область применения
2 Нормативные ссылки
3 Термины и определения
4 Понятия
4.1 Обзор
4.2 Область применения представления физических сенсоров
4.3 Типы физических сенсоров
4.4 Представление сенсора
5 Граф ЗО-сцены сенсора
5.1 Определение графа ЗО-сцены сенсора
5.2 Физические свойства и интерфейсы с реальным миром
6 Системная архитектура для представления физического сенсора
6.1 Системная архитектура для физических сенсоров
6.2 Структура системы
7 Определение представления физического сенсора на языке разметки XML
7.1 Структура сцены смешанной и дополненной реальности
7.2 Определение схемы XML
8 Согласованность
8.1 Критерии согласованности
8.2 Область согласованности
Приложение А (справочное) Примеры типов и параметров физических сенсоров
Приложение В (справочное) Схема представления сенсора MAR
Приложение С (справочное) Пример расширения XML-схемы для представления физических сенсоров
Приложение D (справочное) Пример представления сенсоров MAR на основе схемы сенсора MAR
Приложение Е (справочное) Примеры реализации представления сенсора MAR
Библиография
Введение
Настоящий стандарт определяет модель представления для физических сенсоров, которые будут использоваться в сфере трехмерных технологий и технологий смешанной реальности. Настоящий стандарт описывает трехмерное моделирование, рендеринг, эмуляцию и интерфейсы физических сенсоров. В настоящем стандарте также изложен набор принципов, концепции и функциональные возможности физических сенсоров, которые могут применяться ко всему спектру стандартов, определяющих смешанную трехмерную реальность. Настоящий стандарт включает в себя следующую информацию:
- термины и определения для интерфейсов сенсоров;
- требования и область применения;
- модель представления физических сенсоров, которые могут использоваться в ЗО-сценах;
- ЗО-моделирование, рендеринг и эмуляция физических сенсоров в ЗО-сценах;
- представление атрибутов физических сенсоров в ЗО-сценах;
- представление потока данных ввода/вывода физических сенсоров в ЗО-сценах;
- представление интерфейсов для управления физическими сенсорами в ЗО-сценах;
- функциональные возможности и базовые компоненты;
- соответствующие физические свойства сенсора;
- интерфейсы виртуального и реального мира;
- сценарии использования.
Целями настоящего стандарта являются:
- предоставление эталонной модели для приложений смешанной трехмерной реальности на основе физических сенсоров;
- осуществление управления физическими сенсорами и контроль их физических свойств в трехмерных средах смешанной реальности;
- предоставление взаимозаменяемой информационной модели, необходимой для обмена данными между приложениями смешанной реальности на основе сенсоров и для их хранения;
- обеспечение поддержки пользовательских интерфейсов в трехмерных мирах смешанной реальности;
- обеспечение поддержки интерфейсов физических сенсоров в трехмерных мирах смешанной реальности.
ГОСТ Р ИСО/МЭК 18038—2023
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Информационные технологии
КОМПЬЮТЕРНАЯ ГРАФИКА, ОБРАБОТКА ИЗОБРАЖЕНИЙ И ПРЕДСТАВЛЕНИЕ ДАННЫХ ОБ ОКРУЖАЮЩЕЙ СРЕДЕ
Представление сенсоров в смешанной и дополненной реальности
Information technology.
Computer graphics, image processing and environmental representation.
Sensor representation in mixed and augmented reality
Дата введения — 2024—01—30
1 Область применения
Настоящий стандарт определяет структуру и информационную эталонную модель для представления трехмерных миров смешанной реальности на основе сенсоров. В настоящем стандарте излагаются концепции, информационная модель, архитектура, функции систем и способы интеграции виртуальных трехмерных миров и физических сенсоров для создания приложений смешанной реальности с интерфейсами физических сенсоров. Настоящий стандарт также определяет формат обмена, необходимый для обмена данными между приложениями смешанной реальности на основе физических сенсоров и для их хранения.
Настоящий стандарт описывает следующие функциональные возможности:
- представление физических сенсоров в ЗО-сценах;
- определение физических сенсоров в ЗО-сценах;
- представление функциональных возможностей каждого физического сенсора в ЗО-сценах;
- представление физических свойств каждого физического сенсора в ЗО-сценах;
- управление физическими сенсорами в ЗО-сценах;
- интерфейс с информацией о физических сенсорах в ЗО-сценах.
Настоящий стандарт определяет эталонную модель для приложений смешанной реальности на основе физических сенсоров для представления и обмена функциями физических сенсоров в ЗО-сценах. Настоящий стандарт не описывает конкретные физические интерфейсы, необходимые для управления физическими устройствами, а скорее дает определение общих функциональных интерфейсов, которые могут взаимозаменяемо использоваться между приложениями.
Настоящий стандарт не содержит описания реализации конкретных приложений с помощью определенных физических сенсорных устройств. Настоящий стандарт не описывает генерируемую компьютерами информацию сенсоров с использованием компьютерных устройств ввода/вывода, таких как мышь или клавиатура. Сенсоры в контексте настоящего документа представляют собой физические сенсорные устройства в реальном мире.
2 Нормативные ссылки
В настоящем стандарте нормативные ссылки отсутствуют.
Издание официальное
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями.
ИСО и МЭК ведут терминологические базы данных для использования в стандартах по следующим адресам:
- платформа онлайн-просмотра ИСО: доступна по адресу https://www.iso.org/obp;
- Электропедия МЭК: доступна по адресу http://www.electropedia.org/.
3.1 30-объект (3D object): Набор вершин в ЗЭ-пространстве, соединенных посредством различных геометрических объектов, таких как треугольники, линии, кривые поверхности и т. д.
3.2 дополненная реальность; AR (augmented reality, AR): Интерактивное восприятие среды реального мира, при котором объекты, находящиеся в реальном мире, дополняются созданной компьютером перцептивной информацией.
3.3 сенсор камеры (camera sensor): Сенсор (3.26), который обнаруживает и преобразует оптическое изображение в электронный сигнал.
3.4 система видеонаблюдения; CCTV (closed-circuit television, CCTV): Система видеонаблюдения, которая использует видеокамеры для передачи сигнала на определенный набор мониторов в другом месте.
3.5 химический сенсор (chemical sensor): Сенсор (3.26), который может анализировать и предоставлять информацию о химическом составе среды, в которой он находится, то есть о жидких или газовых средах.
3.6 электрический сенсор (electric sensor): Сенсор (3.26), который исследует изменение электрических или магнитных сигналов в зависимости от состояния среды.
3.7 сенсор среды (environment sensor): Сенсор (3.26), который отслеживает относительную влажность, освещенность, давление и температуру.
3.8 сенсор расхода (flow sensor): Сенсор (3.26) для определения скорости потока жидкости.
3.9 сенсор силы (force sensor): Сенсор (3.26) резистора для определения силы, значение сопротивления которого изменяется при приложении силы или давления.
3.10 глобальная навигационная спутниковая система; GNSS (globally navigation satellite system, GNSS): Спутниковая навигационная система с глобальным покрытием.
3.11 статистически уникальный идентификатор; GUID (globally unique identifier, GUID): Уникальный идентификационный номер, используемый в качестве идентификатора в компьютерных системах.
3.12 сенсор освещенности (light sensor): Фотосенсор, который обнаруживает количественные изменения светового сигнала.
3.13 смешанная и дополненная реальность; MAR (mixed and augmented reality, MAR): Объединение реального и виртуального миров, включая смешанную реальность (3.14) и дополненную реальность (3.2).
3.14 смешанная реальность; MR (mixed reality, MR): Объединение реального и виртуального миров для создания новых сред, в которых физические и искусственно созданные объекты существуют совместно и взаимодействуют друг с другом.
3.15 система на основе смешанной реальности (mixed reality system): Система, которая способна обрабатывать приложения смешанной реальности (3.14) с поддержкой функций управления, таких как чтение, запись, импорт, экспорт, изменение, отображение и т. д.
3.16 сенсор движения (movement sensor): Сенсор для обнаружения изменения положения объекта относительно окружающей среды или изменения окружающей среды относительно объекта.
3.17 сенсор содержания кислорода (oxygen sensor): Электронное устройство, измеряющее уровень содержания кислорода (О2) в анализируемой газовой или жидкой среде.
3.18 сенсор обнаружения частиц (particle sensor): Сенсор для обнаружения, отслеживания и (или) идентификации высокоэнергетических частиц.
3.19 физическое устройство (physical device): Реальное устройство, содержащее сенсор (3.26), который представлен виртуальным устройством в виртуальной среде.
3.20 физический сенсор (physical sensor): Сенсор интернета вещей (1оТ) (3.26), который обладает функциональностью физического устройства (3.27) в виртуальном трехмерном мире.
3.21 сенсор положения (position sensor): Сенсор (3.26), позволяющий измерять положение.
3.22 сенсор давления (pressure sensor): Сенсор (3.26), измеряющий давление (обычно газов или жидкостей).
3.23 программируемый логический контроллер; PLC (programmable logic controller, PLC): Компьютер, используемый для автоматизации, как правило, промышленных электромеханических процессов, таких как управление оборудованием заводских сборочных линий, аттракционов или осветительных приборов.
3.24 сенсор приближения (proximity sensor): Сенсор (3.26), способный без прямого физического контакта определять наличие поблизости различных объектов.
3.25 радиочастотная идентификация (radio frequency identification, RFID): Беспроводное использование электромагнитных полей для передачи данных в целях автоматической идентификации и отслеживания меток, размещенных на различных объектах.
3.26 сенсор (sensor): Устройство для обнаружения событий или изменений в окружающей среде и передачи информации на другие электронные устройства.
3.27 сенсор звука (sound sensor): Сенсор (3.26), используемый для определения интенсивности звука в окружающей среде.
3.28 сенсор температуры (temperature sensor): Сенсор (3.26) для обнаружения изменений температуры.
3.29 универсальный уникальный идентификатор (universally unique identifier, UUID): Статистически уникальный идентификатор 128-разрядное число, используемое для идентификации информации в компьютерных системах.
3.30 виртуальный мир (virtual world): Набор, состоящий из одного или нескольких файлов виртуальной реальности (VR) и другого мультимедийного контента, который после обработки браузером с поддержкой технологии VR предоставляет пользователю интерактивные функциональные возможности, спроектированные разработчиком.
Примечание — Под термином «виртуальная реальность (VR)» понимаются интерактивные функциональные возможности, созданные компьютером и доступные в искусственно созданной и эмулированной среде.
4 Понятия
4.1 Обзор
В данном подразделе описываются понятия смешанной и дополненной реальности на основе сенсоров, включая определение, цели, тип сенсора, представление физического сенсора, системные функции для смешанной и дополненной реальности (MAR), объекты MAR, граф сцены MAR и мир MAR.
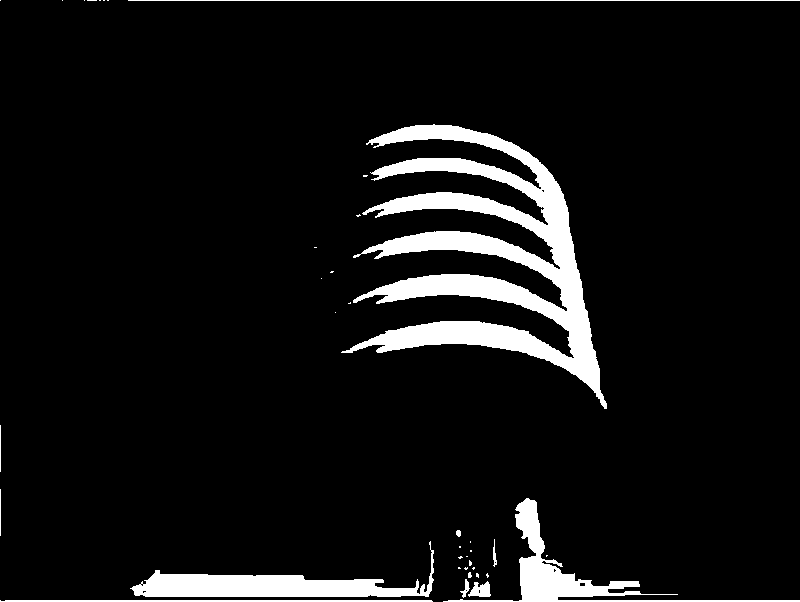
Мир смешанной реальности состоит из сенсоров виртуального трехмерного мира и реального мира, представленных в виде ЗО-объектов с их физическими свойствами. На рисунке 1 в качестве простого примера представлена схематическая сцена мира смешанной реальности. На рисунке изображен памятник архитектуры в виде виртуального ЗО-мира с сенсором глобальной навигационной спутниковой системы (GNSS) и сенсором системы видеонаблюдения. Виртуальный мир представляет собой реальный памятник архитектуры, а человек на экране является туристом. Информация GNSS отображается для отслеживания перемещения туриста, а реальное устройство системы видеонаблюдения находится в точке его реального физического присутствия в месте, где размещен памятник архитектуры.
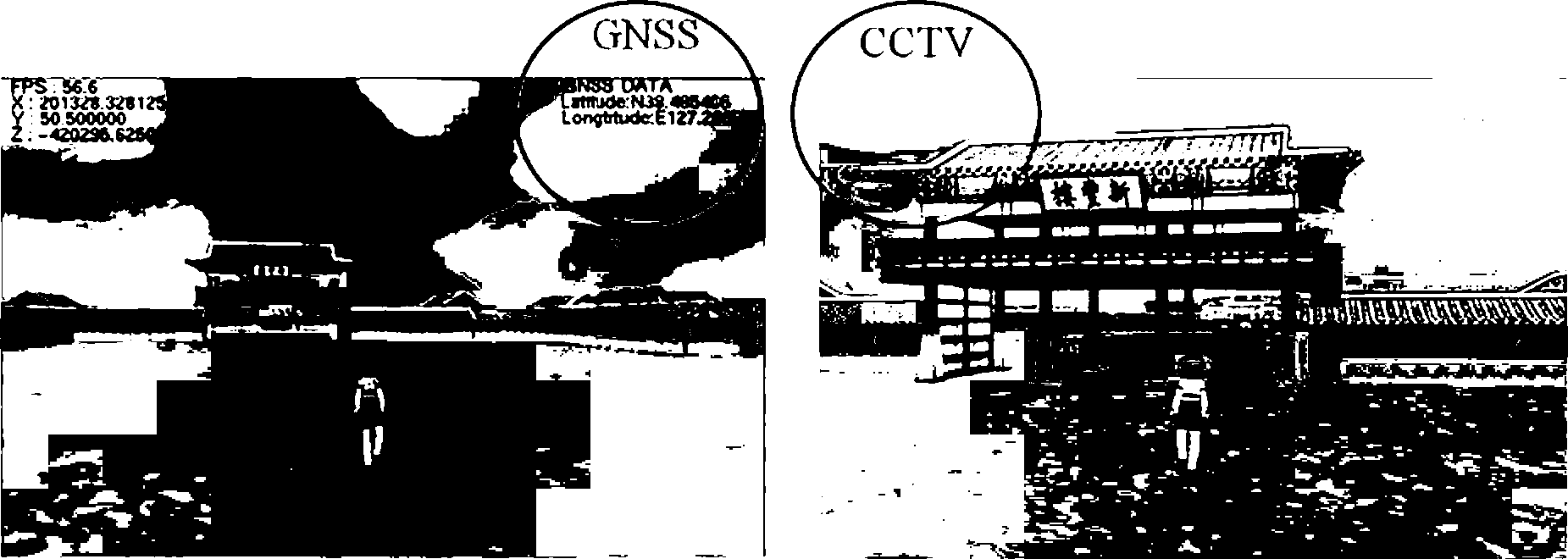
Рисунок 1 — Пример мира смешанной реальности на основе сенсоров
После интеграции реальных физических сенсоров в виртуальный трехмерный мир их физические свойства можно с высокой точностью представить в виртуальном мире. В результате объединения трехмерного мира с физическими сенсорами в реальном мире создается смешанная реальность на основе сенсоров. Для смешанной реальности в виртуальном трехмерном мире создаются сенсоры, и информация с них передается между приложениями, а также между виртуальным и реальным миром. С помощью этого можно определить возможности обмена данными AR/MR-приложений в гетерогенных вычислительных средах, а также возможности управления физическими сенсорами и контроля их физических свойств в виртуальном трехмерном мире.
В реальном мире существует большое количество различных физических сенсоров (см. [11], [14], [18]). Для того чтобы управлять ими в ЗО-сцене, эти физические сенсоры классифицируются на основе их информационных типов и функций. Типы физических сенсорных устройств включают в себя акустические и звуковые, автомобильные и транспортные, химические, электрические и магнитные сенсоры, сенсоры окружающей среды и погоды, сенсоры расхода и жидкости, излучения и частиц, навигации, положения и угла, скорости и ускорения, оптические и световые сенсоры, сенсоры давления, силы и плотности, тепловые сенсоры и сенсоры температуры, приближения, присутствия и видеосенсоры. Каждый сенсор представлен в виде физического устройства в ЗО-сцене на визуальном и (или) функциональном уровне в зависимости от приложения и типа сенсора. На рисунке 2 показаны сцены внутри и вне помещений, в каждой из которых присутствует множество физических сенсоров. Каждая сцена представляет собой соответствующий реальный мир. Информация и функции всех сенсоров могут быть представлены в сценах. MAR-сцены с физическими сенсорами могут использоваться для представления и эмуляции функций сенсоров и, следовательно, для управления сенсорами с помощью ЗО-сцены. Они также могут быть использованы для управления инфраструктурой в реальном мире (см. [3]).
Настоящий стандарт описывает возможности представления физических сенсоров в ЗО-сцене, что именно может представлять физический сенсор, функциональные возможности каждого сенсора, а также причины, по которым для каждого сенсора требуется данная спецификация. В случае представления физического сенсора в ЗО-сцене наличие сенсора в сцене не является обязательным и зависит от типа сенсора и приложения. При этом обязательным является представление точного расположения и ориентации сенсора, а также указание единиц измерения для каждого сенсора. ЗО-сцена должна меняться с помощью функции физического сенсора и эмулироваться соответствующим образом. Причина, по которой необходимо именно такое представление, заключается в том, что в ЗО-сцене необходимо реализовать функциональные возможности, с помощью которых можно будет контролировать различные физические сенсоры как для информационных целей, так и в целях безопасности.
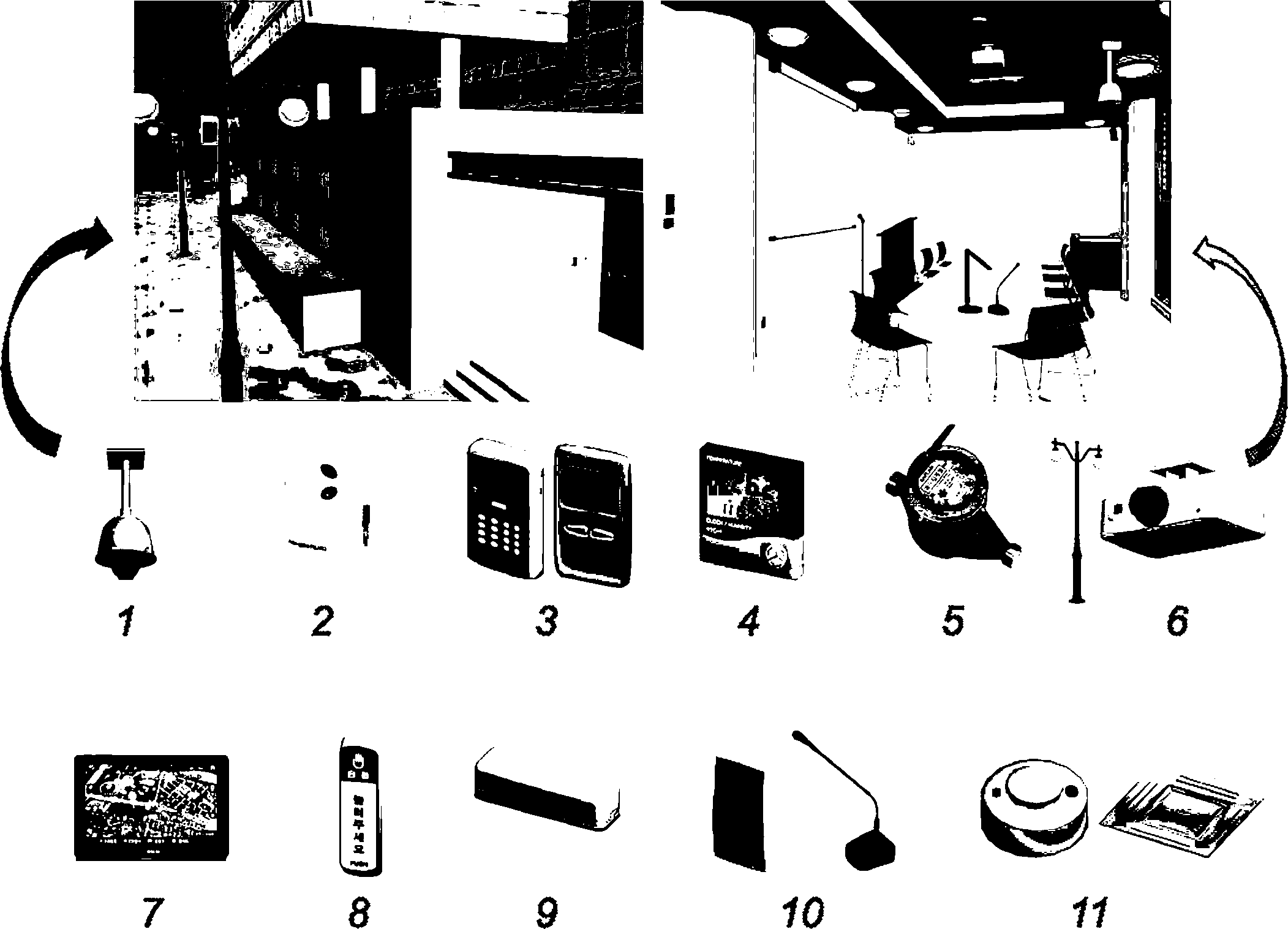
1 — сенсор камеры; 2 — химический сенсор; 3 — электрический сенсор; 4 — сенсор среды; 5 — сенсор расхода; 6 — сенсор освещенности; 7 — сенсор навигации; 8 — сенсор давления; 9 — сенсор приближения; 10 — сенсор звука: 11 — сенсор температуры
Рисунок 2 — Представление миров MAR с физическими сенсорами
4.2 Область применения представления физических сенсоров
В настоящее время в реальном мире используется множество различных типов физических сенсоров, и по мере развития технологий производства физических сенсоров их количество и разнообразие их типов будут расти. Физические сенсоры интегрируются с виртуальными трехмерными мирами посредством технологий информационной конвергенции, включая технологии смешанной и дополненной реальности. Эти технологии будут развиваться и совершенствоваться в зависимости от конкретных потребностей отрасли в будущем. Физические сенсорные устройства также продолжают развиваться с технологической точки зрения. Осуществляется их интеграция в виртуальные трехмерные миры для использования в различных эмуляционных приложениях реального мира.
Определить все возможные типы сенсоров, которые могут быть интегрированы в виртуальный трехмерный мир, сложно, и, по сути, в этом нет никакой необходимости, поскольку они постоянно меняются и обновляются по мере развития технологий производства. Хотя количество типов физических сенсоров будет расти, для интеграции их в ЗЭ-сцены необходим общий интерфейс для всех типов сенсоров. Интерфейс должен обладать следующими характеристиками:
- оформление, свойства, расположение и ориентация физического сенсора должны быть представлены в виртуальном трехмерном мире; виртуальный трехмерный мир должен представлять собой копию сцены реального мира;
- функции физического сенсора должны быть визуализированы или представлены в виртуальном трехмерном мире;
- все прочие сенсоры, которые не могут быть представлены в виртуальном трехмерном мире на визуальном и (или) функциональном уровне, исключаются.
Для того, чтобы предоставить для виртуального ЗЭ-мира общие интерфейсы физических сенсоров, необходимо наличие абстрактной модели данных физических сенсоров для представления и эмулирования этих физических сенсоров (см. [13]). Настоящий стандарт определяет модель данных для представления физических сенсоров в трехмерных мирах MAR. Модель данных определяет абстрактный интерфейс, который может быть использован для любого типа сенсоров, исключая специфические атрибуты конкретного типа сенсора, такие как принцип организации потока данных.
В настоящем стандарте область применения представления сенсоров затрагивает следующие темы:
- концепции физических сенсоров в ЗЭ-сценах;
- возможности представления физических сенсоров в ЗО-сценах;
- возможности организации ЗО-сцены с помощью физических сенсоров;
- возможности определения абстрактной модели для представления физических сенсоров в ЗО-сценах;
- возможности определения системной архитектуры для физических сенсоров в ЗО-сценах;
- возможности использования физических сенсоров в ЗО-сценах;
- типы физических сенсоров для представления сенсоров.
4.3 Типы физических сенсоров
4.3.1 Общая информацияВ целом физические сенсоры и связанные с ними устройства можно классифицировать следующим образом:
- акустические, звуковые, вибрационные сенсоры;
- автомобильные, транспортные сенсоры;
- камеры, изображения;
- химические сенсоры;
- сенсоры электрического тока, электрического потенциала, магнитные сенсоры, радиосенсоры;
- сенсоры окружающей среды, погодных условий, влагосодержания, влажности;
- сенсоры расхода, скорости потока жидкости;
- сенсоры ионизирующего излучения, субатомных частиц;
- сенсоры навигационных приборов;
- сенсоры положения, угла, смещения, расстояния, скорости, ускорения;
- оптические сенсоры, сенсоры света, фотонов;
- сенсоры давления,
- сенсоры силы, плотности, уровня;
- термальные, тепловые, температурные сенсоры;
- сенсоры приближения, присутствия.
Каждый тип сенсора определяется его физическими свойствами и связанными с ним устройствами, которые могут быть представлены и эмулированы в виртуальном трехмерном мире. Типичные параметры физических свойств каждого типа сенсоров описаны в приложении А. Классификация типов сенсоров приведена в 4.3.2—4.3.17.
4.3.2 Сенсор камеры
Этот тип сенсоров интегрирует камеру и изображения реального мира в виртуальный трехмерный мир. Сенсор камеры представлен как устройство камеры, которое преобразует оптическое изображение в электрический сигнал. Используется в цифровых камерах, телефонных камерах, модулях камер и в других устройствах формирования изображений, включая системы видеонаблюдения (см. рисунок 3). Необходимо определить абстрактную модель данных, касающуюся визуальных, функциональных и физических свойств этого типа сенсоров, чтобы представлять и эмулировать их в виртуальном трехмерном мире.
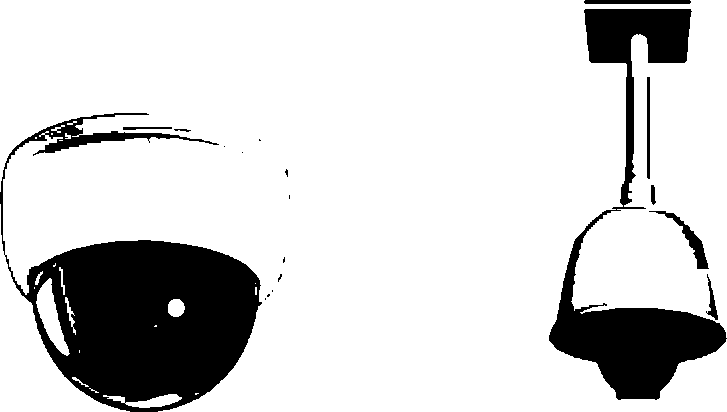
Рисунок 3 — Сенсоры с камерами

4.3.3 Химический сенсор
Этот тип сенсоров интегрирует реальные устройства обнаружения химических веществ в виртуальный трехмерный мир. Сюда входят все устройства обнаружения химических веществ, такие как сенсоры дыма. Необходимо определить абстрактную модель данных, касающуюся визуальных, функциональных и физических свойств этого типа сенсоров, чтобы представлять и эмулировать их в виртуальном трехмерном мире.
Химический сенсор — это автономное аналитическое устройство, которое предоставляет информацию о химическом составе окружающей среды, то есть жидкой или газовой среды (см. рисунок 4). Информация предоставляется в виде измеряемого физического сигнала, который сопоставляется с концентрацией определенного химического вещества (называемого анализируемым веществом). Например, сенсор кислорода (или лямбда-зонд) — это электронное устройство, которое измеряет содержание кислорода (О2) в анализируемом газе или жидкости.
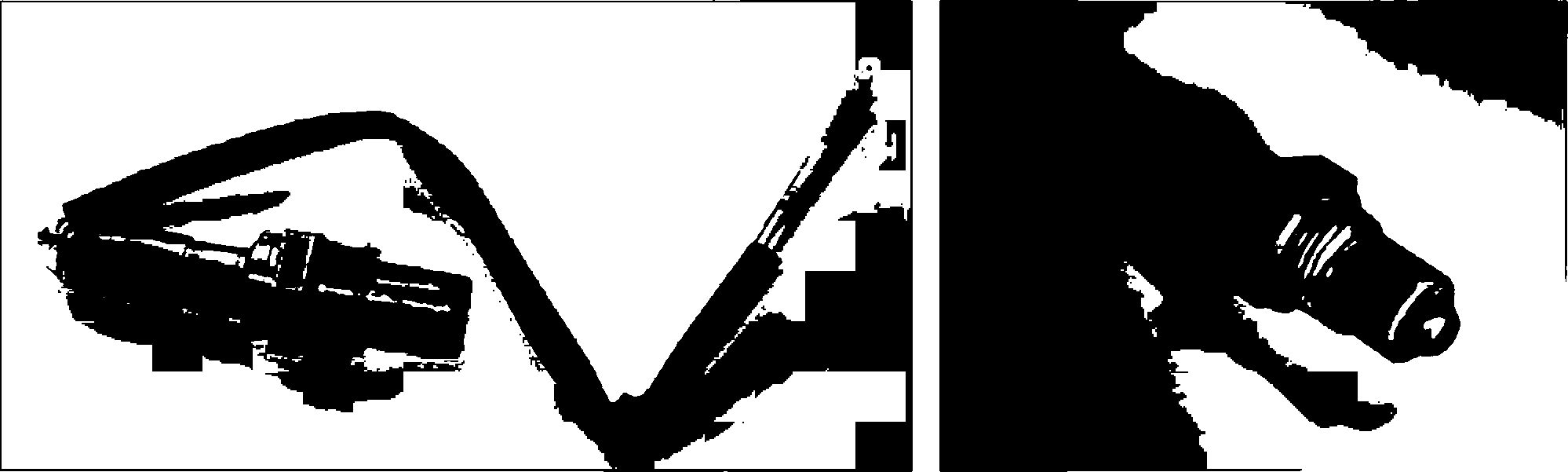
Рисунок 4 — Химический сенсор (сенсор кислорода)
4.3.4 Электрический сенсор
Этот тип сенсоров интегрирует реальные электрические и электронные сигналы в виртуальный трехмерный мир. К этому типу относятся все электрические устройства, такие как сенсоры электричества и напряжения. Необходимо определить абстрактную модель данных, касающуюся визуальных, функциональных и физических свойств этого типа сенсоров, чтобы представлять и эмулировать их в виртуальном трехмерном мире.
Электрический сенсор — это электрический выключатель с ручным или автоматическим управлением, предназначенный для защиты электрической цепи от повреждений, вызванных перегрузкой или коротким замыканием (см. рисунок 5). Его основная функция заключается в обнаружении неисправности и прерывании подачи тока. К этому типу относятся беспилотные системы безопасности и RFID-сенсоры.
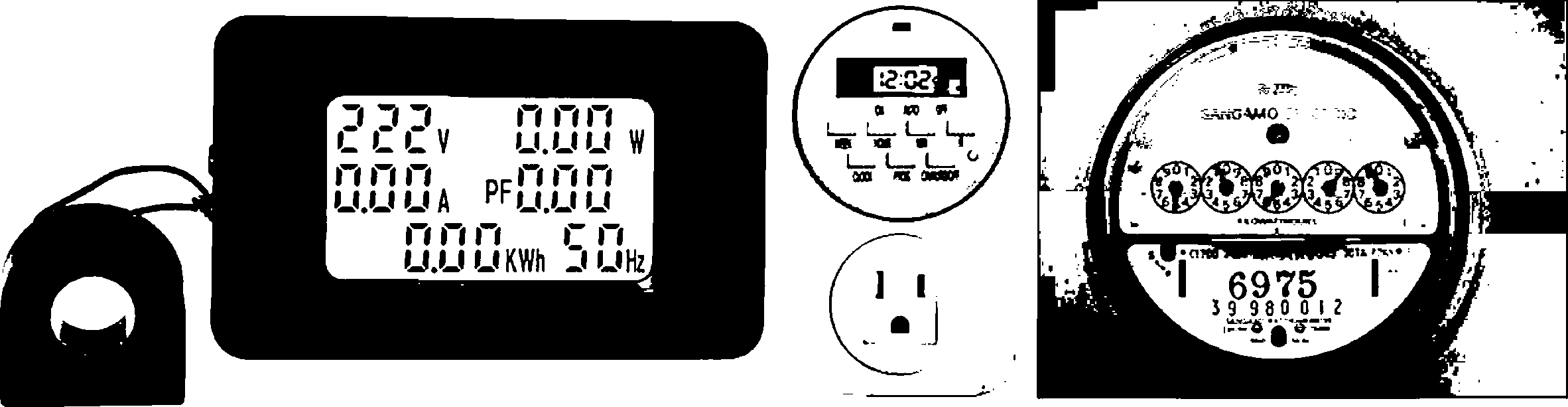
Рисунок 5 — Электрические сенсоры
4.3.5 Сенсор среды
Этот тип сенсоров интегрирует изменения погодных условий, влажности, давления воздуха, а также измерения качества воздуха реального мира в виртуальный трехмерный мир. Необходимо определить абстрактную модель данных, касающуюся визуальных, функциональных и физических свойств этого типа сенсоров, чтобы представлять и эмулировать их в виртуальном трехмерном мире.
Сенсор среды измеряет и представляет характеристики земной поверхности и обеспечивает поддержку требований к информации для эффективного управления окружающей средой (см. рисунок 6).
Как и обычная система, окружающая среда Земли состоит из совокупности взаимозависимых элементов, таких как литосфера, гидросфера, биосфера и атмосфера. Один измерительный прибор можно использовать для измерения жидкостей и твердых веществ, а также веществ в виде гранул, суспензии или потока в открытом канале без замены преобразователя. Сенсоры среды могут измерять уровень пыли, присутствие газов, уровень влажности, окружающего освещения и погодные условия.
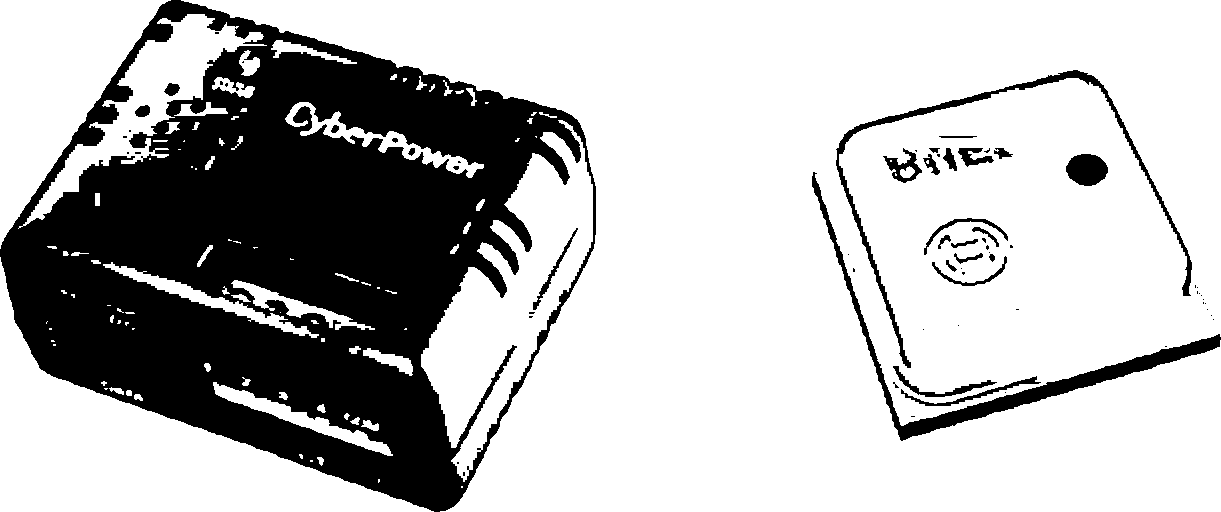
Рисунок 6 — Сенсоры среды
4.3.6 Сенсор расхода
Этот тип сенсоров интегрирует данные потоков воздуха и жидкостей в реальном мире в виртуальный трехмерный мир. В этот тип входят все сенсоры расхода, такие как сенсоры потока воздуха и жидкостей. Необходимо определить абстрактную модель данных, касающуюся визуальных, функциональных и физических свойств этого типа сенсоров, чтобы представлять и эмулировать их в виртуальном трехмерном мире.
Сенсор расхода — это устройство, которое определяет скорость потока жидкости. Как правило, сенсор расхода — это чувствительный элемент, используемый в расходомерах или регистраторах расхода для фиксации значений расхода жидкостей. Измерение расхода необходимо для представления функции сенсора расхода. Примером сенсора расхода является счетчик воды (см. рисунок 7). Учет воды — это процесс измерения потребления воды. Счетчики воды могут устанавливаться на источниках водоснабжения, в скважинах или на протяжении всей системы водоснабжения для определения расхода.
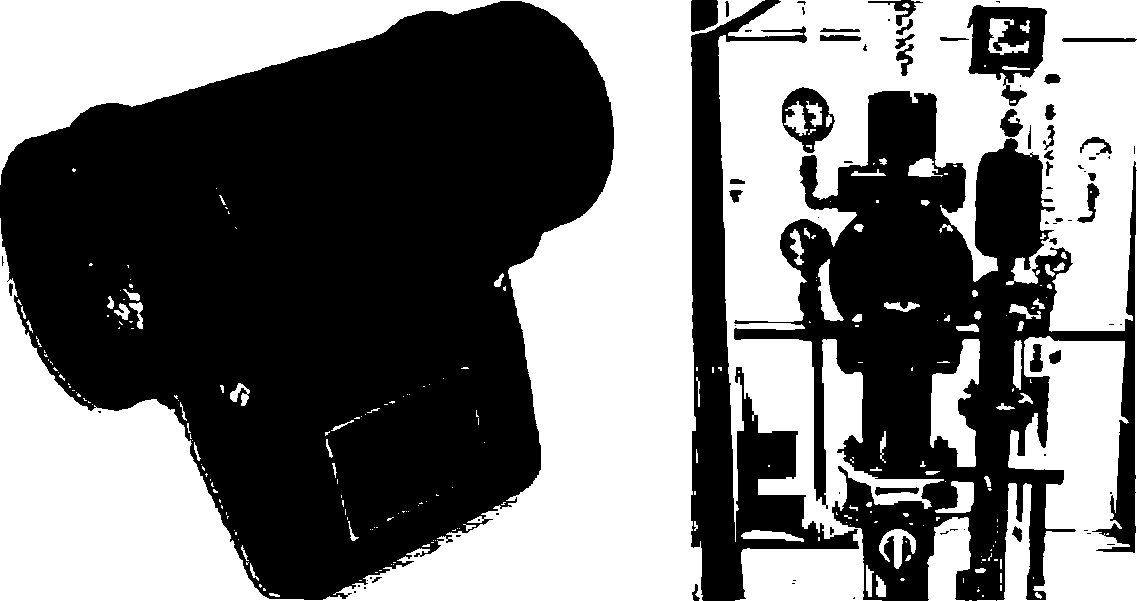
Рисунок 7 — Сенсоры расхода
4.3.7 Сенсор силы
Этот тип сенсоров интегрирует измерения силы, плотности и уровня реального мира в виртуальный трехмерный мир. В этот тип входят все сенсоры силы, преобразователи силы и сенсоры измерения плотности и уровня жидкости и газа. Сенсоры уровня определяют уровень текучих веществ (в том числе жидкостей), суспензий, гранулированных и порошкообразных материалов. Необходимо определить абстрактную модель данных, касающуюся визуальных, функциональных и физических свойств этого типа сенсоров, чтобы представлять и эмулировать их в виртуальном трехмерном мире.
Резистор с измерением силы — это устройство, сопротивление которого меняется при приложении силы или давления (см. рисунок 8). Это устройство также называется чувствительным к силе резистором. Силоизмерительные резисторы состоят из проводящего полимера, который соответствующим образом изменяет сопротивление после приложения силы к его поверхности. В ЗЭ-сценах силоизмерительное устройство может быть представлено с определенным движением на базе его функций.
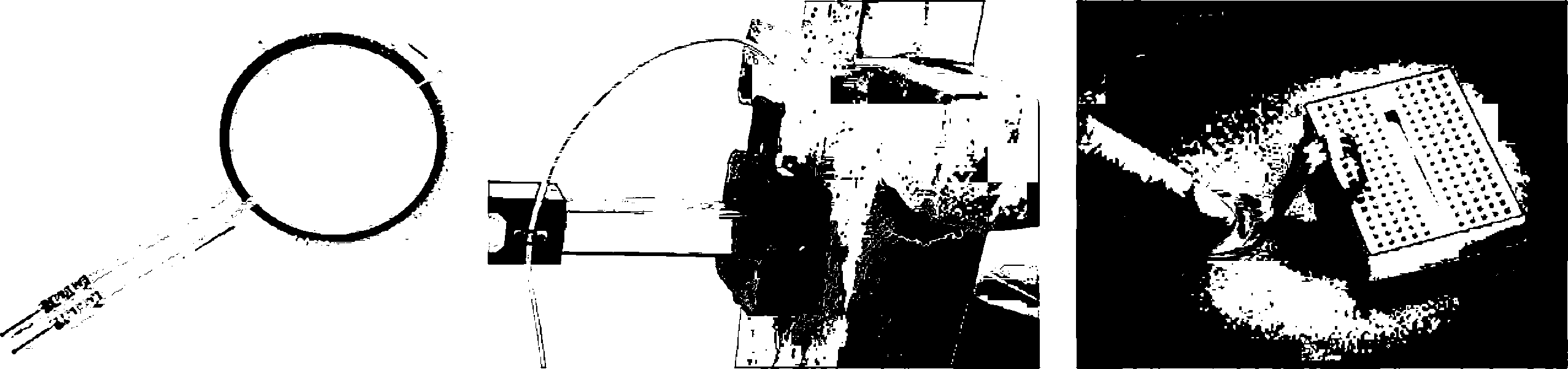
Рисунок 8 — Сенсоры силы
4.3.8 Сенсор освещенности
Этот тип сенсоров интегрирует оптические, световые и фотонные измерения реального мира в виртуальный трехмерный мир. К этой категории относятся все оптические, световые и фотонные детекторы. Необходимо определить абстрактную модель данных, касающуюся визуальных, функциональных и физических свойств этого типа сенсоров, чтобы представлять и эмулировать их в виртуальном трехмерном мире.
Сенсор освещенности — это устройство, которое используется для обнаружения излучения света. Фотосенсоры (фотодетекторы) — это сенсоры света или сенсоры прочей электромагнитной энергии. В настоящем стандарте под сенсорами освещенности подразумеваются оптические детекторы и фоторезисторы, а также светозависимые резисторы (L.DR), которые изменяют сопротивление в зависимости от интенсивности света (см. рисунок 9). В ЗО-сценах сенсор освещенности представляет физическую интенсивность света на основе функций устройства. Сам сенсор освещенности обычно не представлен в ЗО-сценах. Вместо этого имеется представление ЗО-объекта, использующего сенсор освещенности, например электролампы, лампы дневного света или уличного фонаря. Управление осуществляется на основе функций входящего в комплект сенсора освещенности.

Рисунок 9 — Сенсоры освещенности
4.3.9 Сенсор движения
Этот тип сенсоров интегрирует движущиеся объекты реального мира в виртуальный трехмерный мир. Автомобили, роботы и вентиляторы — это примеры устройств, движение которых поддается обнаружению. Необходимо определить абстрактную модель данных, касающуюся визуальных, функциональных и физических свойств этого типа сенсоров, чтобы представлять и эмулировать их в виртуальном трехмерном мире.
Типичным примером сенсора движения является электронный детектор движения, который содержит сенсор движения, преобразующий обнаружение движения в электрический сигнал (см. рисунок 10). Делается это путем измерения оптических изменений в поле зрения сенсора. Детектор движения может быть подключен к охранной сигнализации, которая используется для оповещения владельца дома или специалистов службы безопасности в случае обнаружения движения. Такой детектор может также активировать видеокамеру, фиксирующую проезд на красный сигнал светофора. Возможности применения включают в себя системы наружного освещения с сенсорами движения, уличные фонари и светильники с сенсорами движения.

Рисунок 10 — Сенсоры движения
4.3.10 Сенсор навигации
Этот тип сенсоров интегрирует навигацию в реальном мире в виртуальный трехмерный мир. Сюда входят все сенсоры навигации, определяющие текущее положение, ориентацию и другую навигационную информацию. Необходимо определить абстрактную модель данных, касающуюся визуальных, функциональных и физических свойств этого типа сенсоров, чтобы представлять и эмулировать их в виртуальном трехмерном мире.
Сенсор навигации — это компонент инерциальной навигационной системы (ИНС), который использует компьютер, сенсоры движения (акселерометры) и вращения (гироскопы) для непрерывных вычислений с помощью точного расчета траектории положения, ориентации и скорости (направления и скорости движения) движущегося объекта без необходимости использования внешних ориентиров (см. рисунок 11). Такой тип сенсоров используется, например, на кораблях, самолетах, подводных лодках, управляемых ракетах и космических аппаратах. В ЗО-сценах, основанных на таком виде использования, сам сенсор навигации представлен опционально.
Рисунок 11 — Сенсоры навигации

4.3.11 Сенсор обнаружения частиц
Этот тип сенсоров интегрирует обнаружение ионизирующего излучения и субатомных частиц в реальном мире в виртуальный трехмерный мир. В этот тип входят все детекторы ионизирующего излучения и субатомных частиц. Необходимо определить абстрактную модель данных, касающуюся визуальных, функциональных и физических свойств этого типа сенсоров, чтобы представлять и эмулировать их в виртуальном трехмерном мире.
Сенсор обнаружения частиц представлен детектором обнаружения частиц в экспериментальной и прикладной физике частиц, ядерной физике и ядерной энергетике (см. рисунок 12). Этот сенсор также называется детектором излучения и используется для обнаружения, отслеживания и (или) идентификации высокоэнергетических частиц, например, образующихся при ядерном распаде, космическом излучении или реакциях в ускорителе частиц. Современные детекторы также используются в качестве калориметров для измерения энергии обнаруженного излучения. Они также могут применяться для измерения других характеристик, таких как импульс, вращение, заряд частиц и т. д. Детекторы, разработанные для современных ускорителей, имеют как большие размеры, так и высокую стоимость. Вместо термина «детектор» часто используется термин «счетчик», когда детектор считывает количество частиц, но не определяет их энергию или ионизацию.
Рисунок 12 — Сенсоры обнаружения частиц
4.3.12 Сенсор положения
Этот тип сенсоров интегрирует измерения положения, угла, смещения, расстояния, скорости и ускорения реального мира в виртуальный трехмерный мир. Этот тип охватывает все измерительные сенсоры (такие как сенсоры положения, угла и осциллографы, сенсоры смещения, расстояния, скорости и ускорения). Необходимо определить абстрактную модель данных, касающуюся визуальных, функциональных и физических свойств этого типа сенсоров, чтобы представлять и эмулировать их в виртуальном трехмерном мире.
Сенсором положения является любое устройство, позволяющее измерять положение (см. рисунок 13). В этом качестве может использоваться либо сенсор абсолютного положения, либо сенсор относительного положения (сенсор смещения). Сенсоры положения могут быть линейными, угловыми или многоосевыми. При определении положения в качестве рабочего метода может использоваться:
- расстояние, которое будет представлять собой расстояние между двумя точками, например расстояние, пройденное или удаленное от некоторой фиксированной точки;
- вращение (угловое движение), например вращение колеса робота для определения пройденного им расстояния.
В любом случае сенсоры положения могут обнаруживать движение объекта по прямой линии с помощью линейных сенсоров или угловое движение с помощью сенсоров вращения.
Рисунок 13 — Сенсоры положения
4.3.13 Сенсор давления
Этот тип сенсора интегрирует измерение давления в реальном мире в виртуальный трехмерный мир. В этот тип входят все сенсоры давления и преобразователи давления. Необходимо определить абстрактную модель данных, касающуюся визуальных, функциональных и физических свойств этого типа сенсоров, для их представления и эмуляции в виртуальном ЗЭ-мире.
Сенсор давления измеряет давление, как правило, газов или жидкостей (см. рисунок 14). Давление — это выражение силы, необходимой для того, чтобы остановить расширение жидкости, и обычно оно выражается в виде силы на единицу площади. Сенсор давления обычно работает как преобразователь: он генерирует сигнал в зависимости от значения давления. В настоящем стандарте такой сигнал считается электрическим. Сенсоры давления используются для управления и контроля в самых разных вариантах применения. Сенсоры давления также могут применяться для косвенного измерения других переменных, таких как расход жидкости или газа, скорость, уровень воды и высота над уровнем моря.
Рисунок 14 — Сенсоры давления
4.3.14 Сенсор приближения
Этот тип сенсоров интегрирует измерения приближения и присутствия в реальном мире в виртуальный трехмерный мир. Необходимо определить абстрактную модель данных, касающуюся визуальных, функциональных и физических свойств этого типа сенсоров, чтобы представлять и эмулировать их в виртуальном трехмерном мире.
Сенсор приближения без прямого физического контакта обнаруживает наличие поблизости различных объектов (см. рисунок 15). Обычно сенсор создает электромагнитное поле или испускает луч электромагнитного излучения (например, инфракрасного) и фиксирует изменения в поле наблюдения или обратный сигнал. Сенсоры приближения также используются в мониторинге вибрации оборудования для измерения изменения расстояния между валом и его опорным подшипником.
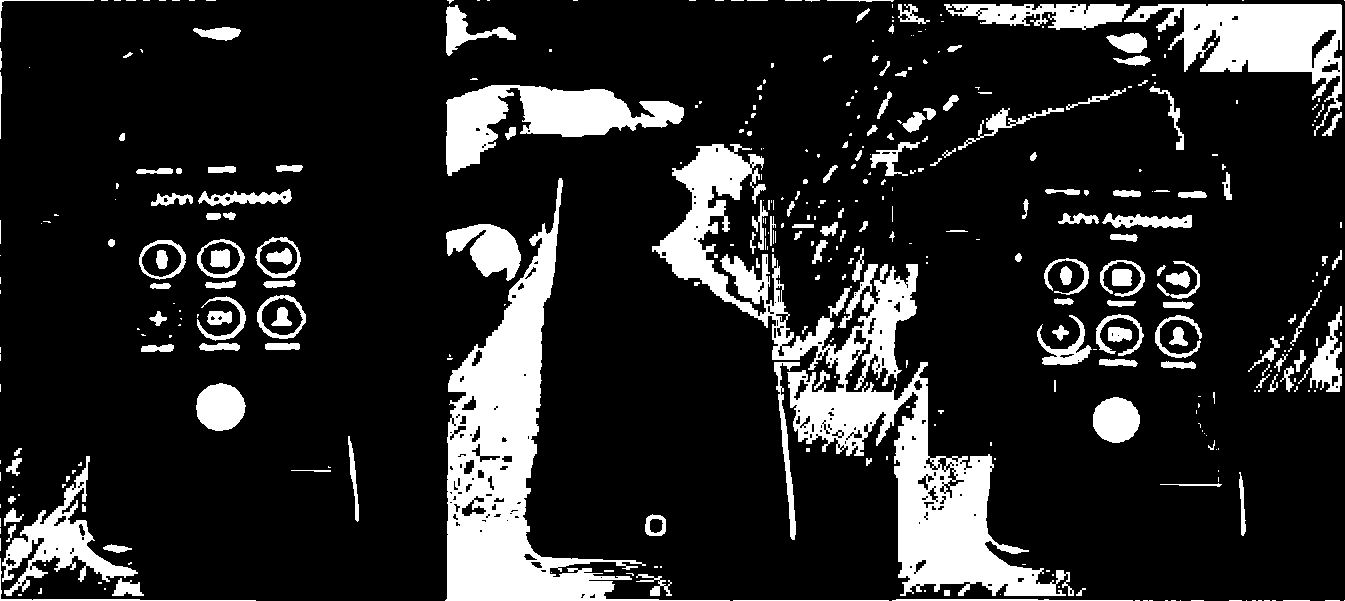
Рисунок 15 — Сенсоры приближения
4.3.15 Сенсор звука
Этот тип сенсоров интегрирует звук в реальном мире в виртуальный трехмерный мир. Сюда входят такие устройства, как динамики, микрофоны, слуховые аппараты и вибрационные измерительные приборы. Необходимо определить абстрактную модель данных, касающуюся визуальных, функциональных и физических свойств этого типа сенсоров, чтобы представлять и эмулировать их в виртуальном трехмерном мире.
Сенсор звука обнаруживает и измеряет звуковые волны и выполняет функцию динамического микрофона (см. рисунок 16). Микрофон — это акустико-электрический преобразователь или сенсор, который преобразует звук в электрический сигнал. Существует множество вариантов использования
микрофонов, например: телефоны, магнитофоны, системы караоке, слуховые аппараты, производство кинофильмов, звуковая техника для трансляции живого и записанного звука, FRS (семейные системы радиосвязи), мегафоны, радио и телевидение. Микрофоны также используются для записи голоса при распознавании речи и в IP-телефонии. К этой категории также относятся неакустические приложения, например ультразвуковой контроль или сенсоры детонации. Большинство современных микрофонов используют принципы электромагнитной индукции (динамические микрофоны), изменения емкости (конденсаторные микрофоны), пьезоэлектрической генерации или модуляции света для создания сигнала электрического напряжения на основе механической вибрации.
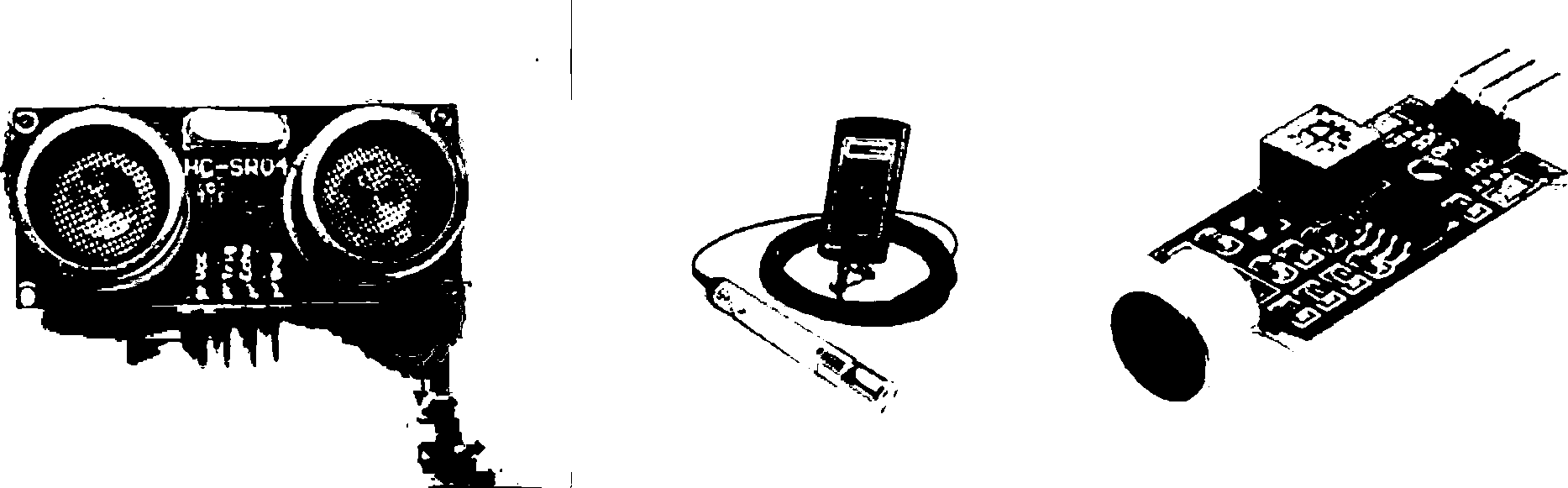
Рисунок 16 — Сенсоры звука
4.3.16 Сенсор температуры
Этот тип сенсоров интегрирует температуру реального мира в виртуальный трехмерный мир. Термометр — это прибор, измеряющий температуру или ее изменение. Необходимо определить абстрактную модель данных, касающуюся визуальных, функциональных и физических свойств этого типа сенсоров, чтобы представлять и эмулировать их в виртуальном трехмерном мире.
Термометр состоит из следующих двух важных элементов:
- сенсор температуры (например, стеклянная колба с ртутью или цифровой сенсор в случае с инфракрасным термометром), в котором происходит некоторое изменение при увеличении или уменьшении температуры;
- определенные средства преобразования этого изменения в числовое значение (например, видимая шкала в ртутном термометре или цифровое значение в инфракрасном термометре).
Сенсор температуры реагирует на изменение температуры и используется для автоматизации управления температурой (см. рисунок 17). Такой тип сенсора фиксирует тепловые изменения, вырабатывает электрический сигнал и классифицируется как сенсор касательного или некасательного типа. Касательный тип сенсоров измеряет значение температуры путем непосредственного контакта с объектом измерения, в то время как некасательный тип сенсоров измеряет тепловое излучение объекта измерения.
Рисунок 17 — Сенсоры температуры
4.3.17 Другие сенсоры
Помимо вышеперечисленных типов сенсоров, существует множество других на стадии разработки и производства, и их использование становится все более распространенным. Их можно будет классифицировать и представлять в виде дифференцируемых типов сенсоров по мере выявления их типичных свойств.
4.4 Представление сенсора
4.4.1 ОбзорСмешанная реальность на основе физических сенсорных устройств объединяет физические сенсорные устройства (или просто физические сенсоры) и их функциональные возможности в виртуальных трехмерных мирах. Внешний вид и физические свойства физического сенсора должны поддерживать представление в виртуальном трехмерном мире. Кроме того, физические свойства и события должны поддерживать возможности контроля и управления в виртуальном мире.
Для того чтобы обеспечить виртуальный трехмерный мир возможностью представления физических сенсоров, системам смешанной реальности необходимы следующие функции:
- представление физических сенсоров в виртуальном трехмерном мире: физический сенсор может быть представлен как геометрическая ЗО-модель или как невидимое сенсорное устройство в строго определенном месте и с точной ориентацией;
- представление визуальных и функциональных свойств каждого физического сенсора в ЗО-сценах;
- представление физических свойств каждого физического сенсора в ЗО-сценах;
- управление потоком данных физических сенсоров в ЗО-сценах;
- интерфейс для управления физическими сенсорами в ЗО-сценах.
На рисунке 18 показана модель представления физического сенсора, которая состоит из мира сенсора MAR, пространственного сопоставителя и сопоставителя событий. Эмулированный мир MAR-сенсора организует содержание MAR с помощью композиции сцены. Многие типы физических сенсоров в реальном мире могут быть представлены и управляться в виртуальных трехмерных мирах.
Пространственная информация (ме-стоположе-ние/ориентация)
Мир MAR-сенсора
Мир MAR
ЗО-мир на основе виртуальной реальности (моделирование)
Физический сенсор (данные модели реального сенсора)
Сопоставители событий
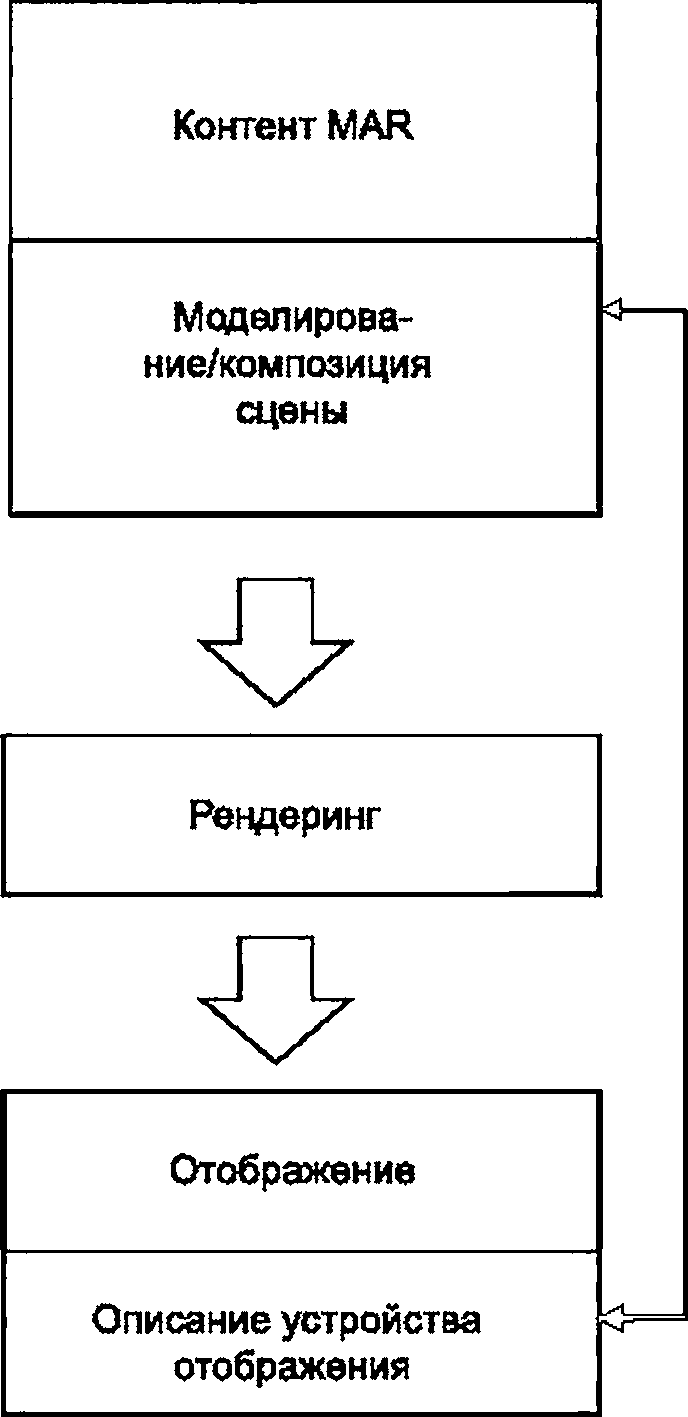
Событие физического сенсора (информация сенсора — реальные данные)
Рисунок 18 — Модель представления физического сенсора
Объекты в физическом мире 3D MAR на основе сенсоров могут быть смоделированы с использованием геометрических или негеометрических данных в зависимости от свойств объектов. Мир MAR необходимо моделировать с использованием точной информации о местоположении и ориентации всех объектов. Другими словами, мир MAR должен быть пространственно синхронизирован с соответствующим ему реальным миром на основе информации о местоположении и ориентации. Местоположение может быть определено с помощью информации GNSS, а ориентация может быть представлена направлением движения объекта. На рисунке 19 показана процедура создания мира сенсора MAR в ЗЭ-сцене.
Виртуальный ЗО-мир сначала создается с помощью ЗО-моделирования, рендеринга и анимации (см. [9], [10]). Затем виртуальный мир расширяется в мир MAR с геопространственными координатами и синхронизируется с соответствующим реальным миром (см. [4]—[7]). Мир MAR предоставляет каждому объекту географическую информацию. Мир MAR на основе физических сенсоров создается из мира MAR, интегрированного с физическими сенсорами.
События физических сенсоров должны поддерживать возможность представления в мире MAR. Существует множество различных типов сенсоров, предоставляющих разные типы информации о событиях и зависящих от физических свойств физических сенсорных устройств. Информация о событии может быть представлена в виде текста, изображения, потока двоичных данных и т. д., в зависимости от типа потока данных, поступающего от сенсора. MAR-контент состоит из виртуальных ЗЭ-объектов, представляющих физические объекты в реальном мире, и физической информации, такой как события, генерируемые физическими сенсорами.
Необходимо использовать два вида интерфейсов. Один из них — это интерфейс, который управляет каждым визуальным объектом MAR в ЗО-сцене. Другой — интерфейс для импорта или экспорта событий, получаемых от физических сенсоров. Эти интерфейсы могут быть интегрированы в ЗО-сцену так, чтобы физические сенсоры были управляемыми и воздействовали непосредственно на сцену.
Трехмерный мир на основе технологии виртуальной реальности
Трехмерное копирование реального мира:
- форма;
- внешний вид;
- масштабирование
Мир MAR с GNSS
Мир MAR с сенсорами
Синхронизация GNSS с реальным миром: - синхронизация GNSS;
- точное расположение и ориентация 3D-объектов;
- спецификация единицы измерения
Трехмерное копирование реального мира с помощью сенсоров:
- функциональное представление сенсоров;
- точное расположение и ориентация сенсоров
Рисунок 19 — Создание мира сенсоров MAR
4.4.2 Точное расположение и ориентация физического сенсора
Точное расположение и ориентация физического сенсора в трехмерном мире MAR задается следующей процедурой:
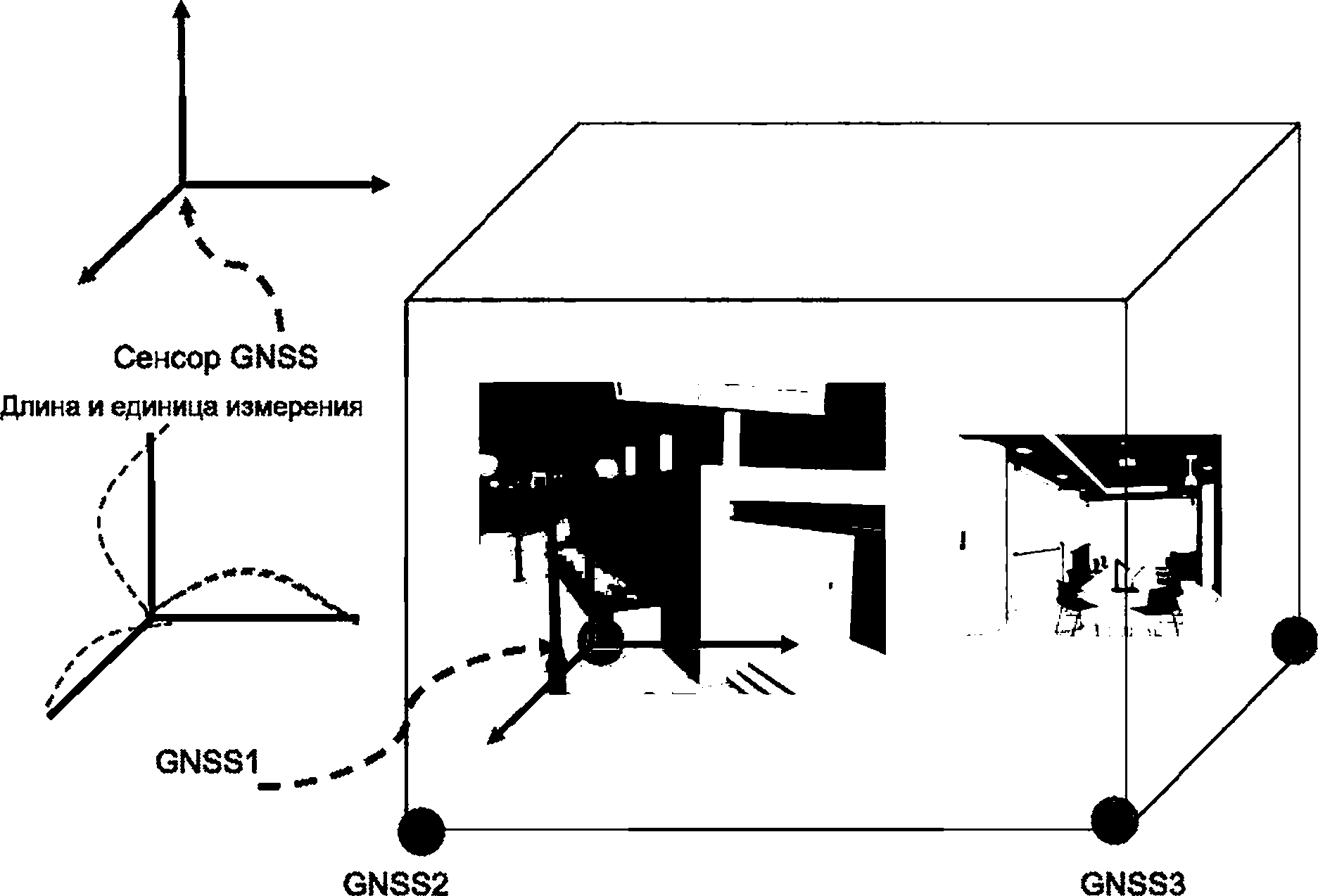
Шаг 1. Определите систему геокоординат виртуальной ЗО-среды, согласованную с ограничивающим прямоугольником GNSS (см. рисунок 20). Ограничивающий прямоугольник определяет восемь позиций GNSS для трехмерного мира MAR, который представляет собой пространство внутри и вне помещений в зависимости от варианта использования. Четыре нижние координаты GNSS можно получить с помощью общего устройства GNSS, а четыре верхние координаты GNSS можно получить с помощью четырех нижних координат GNSS, прибавив к ним длину и ориентацию ограничивающего прямоугольника. Поэтому для каждой ЗО-сцены требуется одна система геокоординат. Сенсор GNSS определяет начало системы геокоординат, а ориентация пространства 3D MAR используется для определения осей системы геокоординат.
Шаг 2. Определите ориентацию каждого сенсора в виртуальной ЗО-среде, согласованной с системой геокоординат (см. рисунок 21). Местоположение сенсора определяется в системе геокоординат. Ориентация сенсора определяется с помощью значений крена, тангажа и рыскания.
Шаг 3. Определите реальную длину с использованием единиц измерения, согласованных с системой геокоординат и значений крена, тангажа и рыскания, заданных ориентацией (см. рисунок 22). Сенсор находится в точном положении с использованием единиц измерения реальной длины.
На рисунке 23 показан процесс усовершенствованного графического конвейера с использованием всех шагов для определения местоположения сенсора 1оТ в мире MAR.
1 Определите систему геокоординат виртуальной ЗО-среды, согласованную с прямоугольником GNSS

GNSS2
GNSS3
Рисунок 20 — Определение системы геокоординат для сцены 3D MAR
2 Определите ориентацию каждого сенсора в виртуальной ЗО-среде, согласованной с системой геокоординат.

Четыре значения сенсоров GNSS. Один геоисточник для каждой ЗО-сцены.
Ориентация каждого сенсора
GNSS4
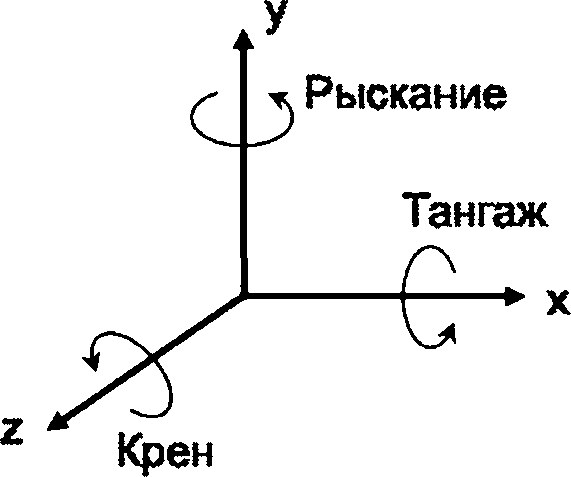
Рисунок 21 — Определение ориентации для сенсора 1оТ
3 Определите реальную длину с использованием единиц измерения, согласованных с местной системой координат и ориентацией.
Четыре значения сенсоров GNSS. Один геоисточник для каждой ЗО-сцены.
Ориентация каждого сенсора. Единицы измерения длины
GNSS4

Углы Тейта — Брайана
Ориентация: утлы Эйлера, углы Тейта — Брайана, вектор ориентации
Рисунок 22 — Определение реальной длины и единиц измерения для сенсора 1оТ
4 Задайте усовершенствованный графический конвейер, включая геокоординаты, ориентацию и систему


Рисунок 23 — Обработка усовершенствованного графического конвейера
4.4.3 Свойства сенсоров и интерфейс
После точного определения местоположения и ориентации физического сенсора необходимо также представить его свойства и интерфейс. Свойства сенсора функционально представлены в ЗО-сцене. Они могут содержать визуальную и (или) функциональную информацию. Свойства сенсора могут быть представлены визуально в сцене. Однако существуют сенсоры, для которых не нужна визуальная информация, например сенсоры звука. В этом случае в сцене будет представлена только функция звука. Интерфейс физического сенсора определяется для предоставления информации о подключении, необходимой для импорта потоковых данных сенсора из реального мира.
4.4.4 Модель данных представления сенсоров
ЗО-сцена создается с помощью графа сцены (см. [9], [10]). Для того чтобы представить сенсоры с их функциональными возможностями в ЗО-сцене, должна существовать возможность передачи результатов обработки графического конвейера для ЗО-сенсоров и ЗО-сцены, а также физических свойств между приложениями и по сети. Трехмерная модель данных для сенсоров может быть определена как расширенный граф ЗО-сцены. В разделе 5 описывается организация графа ЗО-сцены сенсора.
5 Граф ЗО-сцены сенсора
5.1 Определение графа ЗО-сцены сенсора
Трехмерная сцена MAR с сенсорами создается с помощью графа сцены, который состоит из компонентов ЗО-сцены и свойств внешнего вида. В число компонентов входят ЗО-объекты и сенсоры в ЗО-сцене MAR. Организация сцены сенсора MAR выполнена следующим образом:
- представление виртуального трехмерного мира: определите виртуальный трехмерный мир, в том числе обработку и визуализацию информации, получаемой от сенсоров в реальном мире;
- виртуальный трехмерный мир, синхронизированный с помощью GNSS: определите модели данных виртуального трехмерного мира, синхронизированного с помощью GNSS, дополненного информацией реального мира о местоположении и ориентации;
- физические сенсорные устройства и свойства: определите модели данных представляемых сенсорных устройств и их функциональные свойства в виртуальном трехмерном мире;
- интерфейсы с физическими сенсорными устройствами: определите интерфейсы для обработки информации с использованием потоковых данных сенсора. Кроме того, определите подключение к физическому сенсорному устройству или информацию о доступе к нему.
Структура данных, необходимая для организации сцены сенсора MAR, определяется следующим образом:
- Сцена MAR с указанием местоположения и ориентации -------Местоположение (начало координат в системе GNSS) -------Ограничивающий прямоугольник местоположения (четыре нижние координаты GNSS), значения длины и единицы измерения -------Ориентация (тангаж, рыскание, крен) -------Объект MAR -----------------------ЗО-объект -----------------------------------Форма ---------------------------------------------Материалы ---------------------------------------------Интерфейсы с виртуальными мирами -----------------------Физический сенсор -------------------------------Форма -------------------------------------материалы -------------------------------------геометрия -------------------------------------интерфейсы с виртуальными мирами -------------------------------ТИП физического сенсора -------------------------------Физические свойства -------------------------------Интерфейсы с реальными мирами -------------------------------Ориентация (тангаж, рыскание, крен)--
Граф ЗО-сцены для ЗО-сцены MAR представлен на рисунке 24.

Физическим сенсор
Тип сенсора
Физические свойства
Геометрия
Физические интерфейсы
с реальными мирами
Ориентация (тан-
гаж/рыскание/крен)
мерения
Интерфейсы с виртуальными мирами
Интерфейсы с виртуальными мирами
Объект MAR
Сцена MAR
Начало координат в системе
GNSS
Информация об ограничивающем прямоугольнике GNSS, длина и единицы из
ЗО-объект
Форма
Форма
Геометрия
Расположение и ориентация
Материал
Материал
Рисунок 24 — Граф ЗО-сцены MAR с сенсором
Иерархическая структура, представленная на рисунке 24, описывает структуру данных ЗО-сцены MAR, которая состоит из набора объектов MAR, начала координат в системе GNSS, ограничивающего прямоугольника GNSS со значениями длины, единицами измерения и ориентацией. Объект MAR состоит из ЗО-объекта и (или) физических сенсоров. Трехмерный объект для объекта MAR находится в сцене MAR с указанием информации о его местоположении и ориентации. Информация о форме ЗО-объекта и (или) физического сенсора включает в себя информацию о внешнем виде. Внешний вид относится к любой сенсорной информации, указанной для объекта. Например, один объект MAR может быть представлен с помощью визуальной формы, а другой — с помощью слуховой информации. Визуальный внешний вид — это то же самое, что и графическое представление объекта, которое включает в себя информацию о геометрии и материалах. Начало координат в системе GNSS определяется для местоположения ЗО-сцены MAR, которая представляет собой копию реального мира. Например, ЗО-сцена здания или конференц-зала в реальном мире имеет начало координат в системе GNSS с его местоположением. Для каждой ЗО-сцены в нижней части пространства создается ограничивающий прямоугольник GNSS для определения местоположения ЗО-сцены с соответствующим местоположением в системе GNSS.
Если объект MAR имеет физический сенсор, то он определяется его местоположением и ориентацией, типом сенсора, физическими свойствами и интерфейсами с реальным миром. Физические свойства включают в себя информацию, необходимую для импорта данных сигнала во внешние физические сенсорные устройства или экспорта этих данных в обратном направлении. Интерфейсы с реальным миром содержат информацию о подключении, необходимую для распознавания сенсорного устройства в сетевой среде.
5.2 Физические свойства и интерфейсы с реальным миром
5.2.1 Общая информацияЧтобы представить функцию физического сенсора в виртуальном ЗО-пространстве, обеспечивается управление физическими свойствами и информацией о подключении физического сенсора. Структура сцены MAR включает в себя эту информацию относительно типа физического сенсора и других ЗО-объектов в сцене.
5.2.2 Физические свойства физического сенсора
Физический сенсор представляет наличие физического сенсорного устройства и его функции в сцене MAR. Физическое сенсорное устройство определяется его свойствами, такими как ULIID, имя, тип события, тип управления и описание, как показано на рисунке 25. Поле UUID используется для уникальной идентификации физического сенсора, name — это имя физического сенсора, event type — это тип входного потока данных от устройства, control type — это тип информации об управлении, передаваемой устройству, a description — это описание устройства. В таблице 1 приведены поля, необходимые для представления физических свойств физического сенсорного устройства.
Устройство
Пример
UUID
NAME
<КАМЕ>Кондиционер</МАМЕ>
<EVENT_TYPE>TEMP</EVENT_TYPE>
<CONTROL_TYPE>TEMP</CONTROluTYPE>
<DESC>thii ceHcopa</DESC>
EVENTTYPE
CONTROL.TYPE
DESC
Рисунок 25 — Физические свойства физического сенсора
Таблица 1 — Описание физического сенсорного устройства
Поля с информацией об устройстве | Свойства устройства |
UUID | Уникальный идентификатор для распознавания устройства |
NAME | Имя устройства |
EVENT_TYPE | Тип данных, которые могут отправляться с физического сенсорного устройства |
CONTROL_TYPE | Тип данных, которые могут отправляться на физическое сенсорное устройство |
DESC | Дополнительное описание физического сенсорного устройства |
5.2.3 Физические интерфейсы с реальным миром физического сенсора
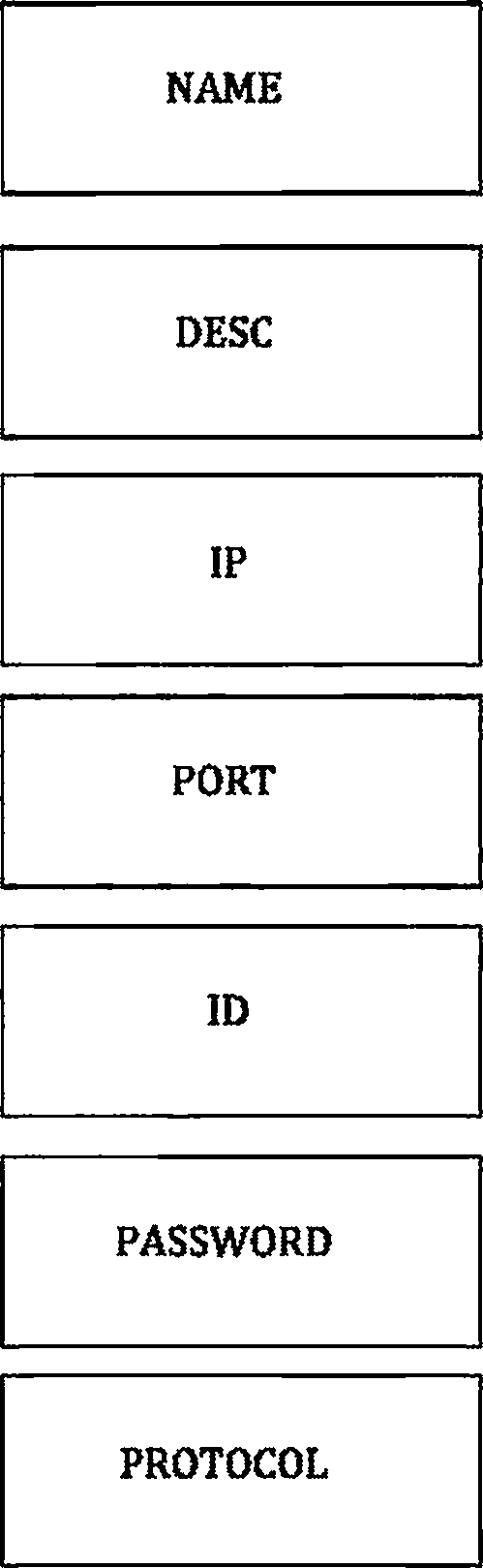
В структуре сцены MAR физические интерфейсы с реальным миром относятся к определению информации о соединении устройства со сценой посредством приложения. Имеются следующие поля: name, description, IP, port, ID, password и protocol (рисунок 26). В поле name указывается имя соединения, поле desc описывает информацию о соединении, IP — IP-адрес устройства, port — номер порта для подключения устройства, ID — идентификатор пользователя, password — соответствующий пароль пользователя, a protocol — протокол, используемый для соединения с устройством. В таблице 2 приведены поля, необходимые для физических интерфейсов физического сенсорного устройства.
Подключение
Пример
<№АМЕ>Управляющее устройство кондиционера</ЫАМЕ>
<ВЕЗС>Информация о подключении</ЛЕ$С>
<PORT>8O80</PORT>
<ID>userl</ID>
<PASSWORD>passl</PASSWORD>
<PROTOCOL>TCP</PROTOCOL>
Рисунок 26 — Физические интерфейсы с реальным миром
Таблица 2 — Описание физического сенсорного устройства
Поля с информацией о подключении | Информация о подключении физического сенсорного устройства |
NAME | Имя, связанное с информацией о подключении |
DESC | Описание информации о подключении |
IP | IP-адрес физического сенсорного устройства |
PORT | Порт для физического сенсорного устройства |
ID | Идентификатор пользователя для доступа к физическому сенсорному устройству |
PASSWORD | Пароль идентификатора пользователя для доступа к физическому сенсорному устройству |
PROTOCOL | Протокол обмена данными |
5.2.4 Структура данных для физических свойств и интерфейсов физического сенсора
При организации сцены MAR с помощью физических сенсоров можно использовать различные типы сенсоров в зависимости от приложения. Типы сенсоров можно определить путем развертывания структуры базовых данных физических свойств и интерфейсов. В настоящем стандарте указывается абстрактная структура данных для физических свойств и интерфейса в графе сцены. Более подробная информация о конкретных физических сенсорах может быть указана в пользовательских приложениях. Например, рассмотрим приложение, которое имеет три физических сенсора: термометр, RFID (радиочастотная идентификация) и PLC (программируемый логический контроллер) (см. рисунок 27). В этом примере пользовательские приложения могут развернуть три типа физических сенсоров для получения 22
подробной информации о температуре, влажности, цифровом входе, цифровом выходе, аналоговом входе и т. д. (см. [14]).
Физический сенсор в графе сцены ЗЛ-приложения сенсора
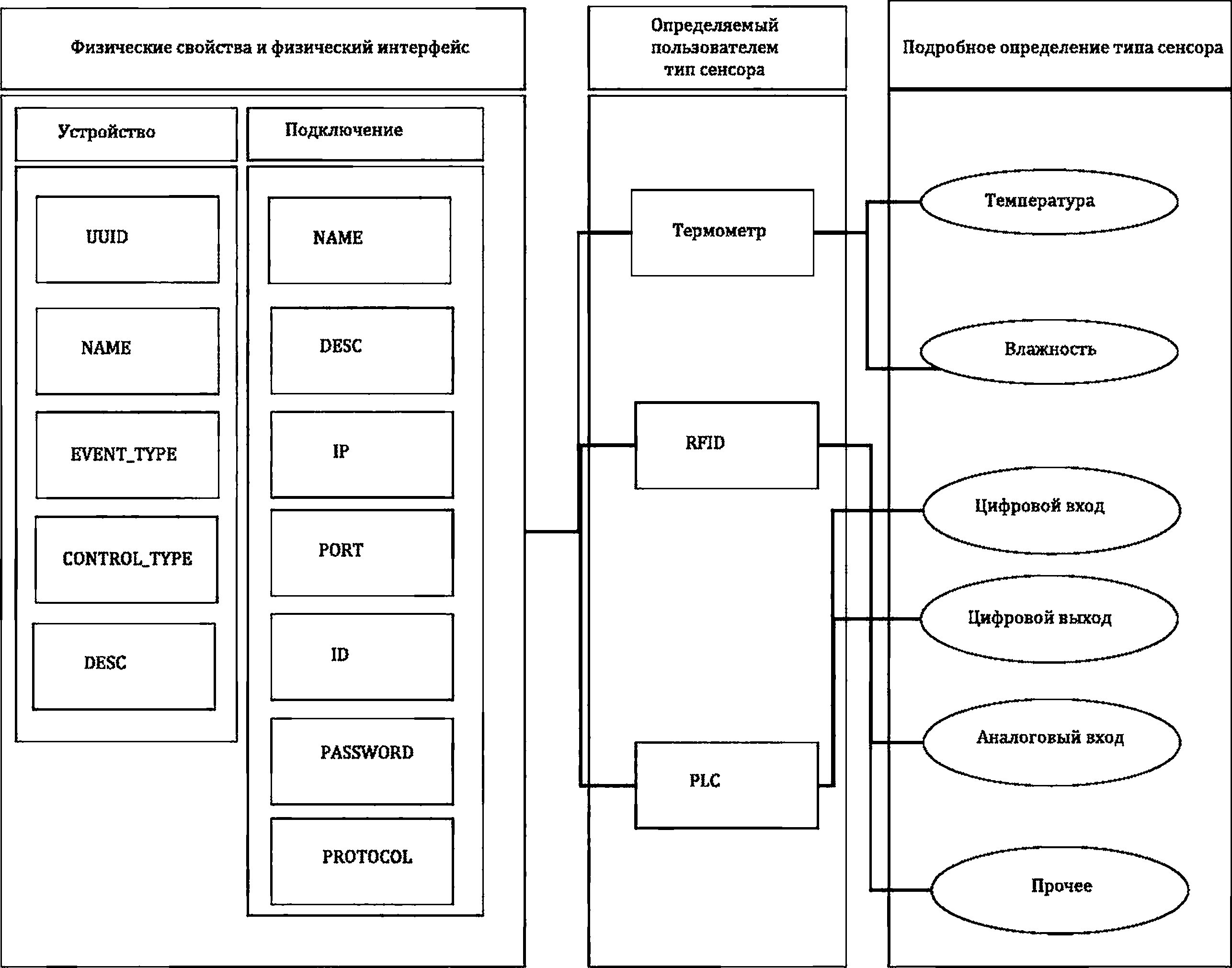
Рисунок 27 — Взаимосвязь между физическими свойствами и пользовательскими приложениями
На рисунке 28 показана структура данных для физических свойств и интерфейсов физических сенсорных устройства.
Физический сенсор
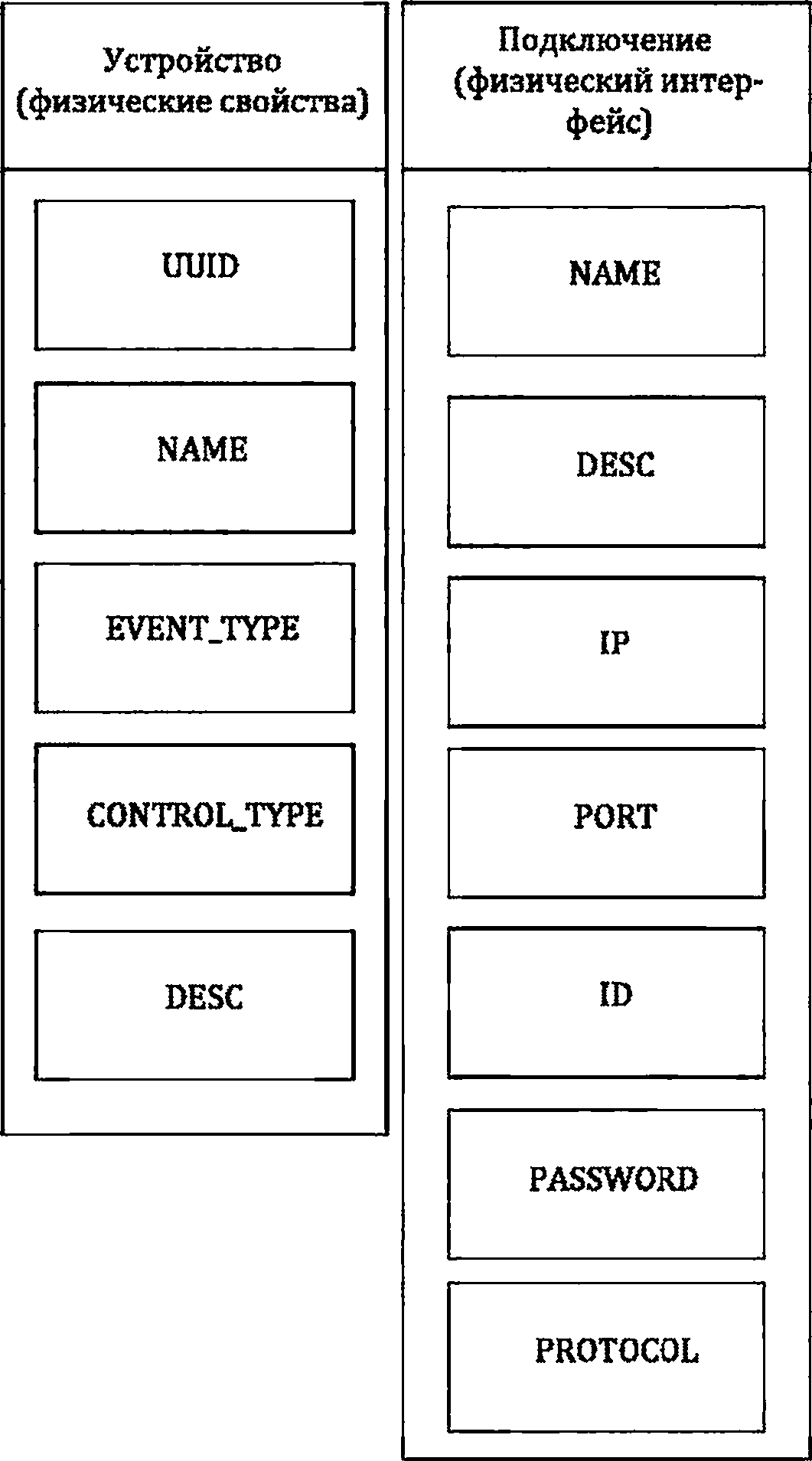
«Физические свойства физического сенсора» «Device»
<UUID> «Name» «EventType» «ControlType» «Deso
«Физический интерфейс физического сенсора» «Connection»
«Name» «Deso
<IP>
«Port»
<ID>
«Password» «Protocol»
Рисунок 28 — Структура данных физических свойств и интерфейсов для физического сенсора
6 Системная архитектура для представления физического сенсора
6.1 Системная архитектура для физических сенсоров
При создании ЗО-сцены MAR, менеджер графов сцены MAR управляет всеми необходимыми для сцены данными. ЗО-сцена может быть сохранена в файле данных MAR. Файл содержит все данные для генерации и передачи по сети ЗО-сцены MAR. Файл данных MAR определяет ЗО-сцену MAR, используя следующие компоненты:
- файл данных MAR;
- парсер MAR;
- менеджер объектов MAR;
- менеджер графа сцены MAR;
- сцена MAR и граф событий;
- интерфейс доступа к сцене MAR;
- контроллер событий;
- интерфейс физического сенсора.
На рисунке 29 показана общая архитектура для представления физических сенсоров в ЗО-сцене. Парсер считывает данные из файла данных MAR и интерпретирует их как различные объекты MAR. Объекты MAR состоят из визуальных объектов и объектов сенсора, которые управляются менеджером объектов MAR. События, генерируемые программой внешнего устройства, передаются в контроллер событий через интерфейс физического сенсора. Контроллер отправляет события, которые должны быть представлены сценой, на объект сенсора, который управляется менеджером объектов MAR. Интерфейс доступа к сцене MAR получает и обрабатывает данные о событиях для представления на сцене полученных от контроллера событий сенсора. На рисунке 29 одна из стрелок, выходящих из контроллера событий, указывает, что событие влияет на визуальный объект, а другая стрелка указывает, что событие представлено независимо от любого визуального объекта в сцене. В обоих случаях события могут быть представлены в сцене MAR. Менеджер графа сцены MAR генерирует и обрабатывает граф сцены, который определяется геометрией, свойствами и событиями, с помощью визуальных объектов, объектов сенсоров и событий сенсоров. Когда в сцене происходит изменение через пользовательский интерфейс, оно передается в контроллер событий менеджером объектов MAR, а затем в программу внешнего устройства.

Рисунок 29 — Системная архитектура для представления физических сенсоров
6.2 Структура системы
6.2.1 Общие положенияНа концептуальном уровне система мира MAR с физическими сенсорами включает в себя пять компонентов, необходимых для обработки представления и функций физических сенсоров в виртуальном трехмерном мире (см. рисунок 30).
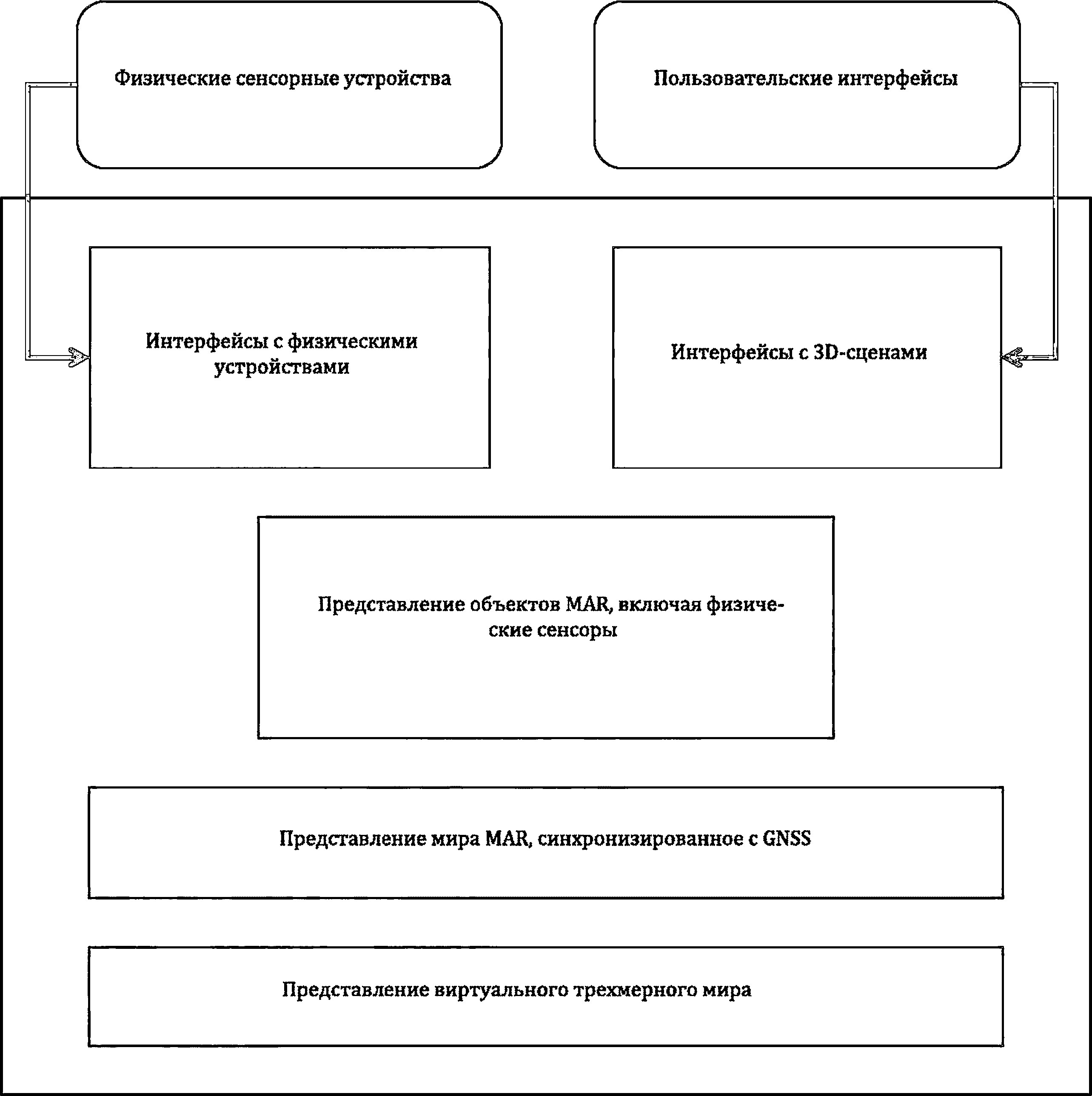
Рисунок 30 — Системная структура для мира MAR с физическими сенсорами
6.2.2 Представление трехмерного мира MAR
Мир MAR с физическими сенсорами организуется с помощью виртуального трехмерного мира, эмулирующего вариант использования в реальном мире. Функции ЗО-моделирования и визуализации имеют важное значение для системы MAR и являются необходимыми. Сначала необходимо определить виртуальный трехмерный мир, эмулирующий реальный мир, а также предоставить функции ЗО-моделирования и рендеринга для физических сенсоров в этом мире. Модель виртуального трехмерного мира может иметь любой размер, например размер комнаты, здания, улицы или города, в зависимости от приложения.
6.2.3 Виртуальные трехмерные миры, синхронизированные по системе GNSS
Виртуальный ЗО-мир, эмулирующий реальный мир, должен быть синхронизирован с информацией системы GNSS, чтобы все объекты в реальном мире могли быть корректно размещены в виртуальном ЗО-мире (см. [19]). Причина использования информации системы GNSS для всех объектов в виртуальном трехмерном мире заключается в определении и распознавании объектов реального мира с указанием их точного местоположения в виртуальном трехмерном мире. Поэтому необходим метод 26
создания виртуального трехмерного мира, синхронизированного по системе GNSS. В дополнение к общему миру, синхронизированному по системе GNSS, все ЗО-объекты, включая физические сенсоры, могут иметь собственную информацию системы GNSS при необходимости. Информация системы GNSS и данные ориентации должны определяться для каждого объекта в мире MAR.
6.2.4 Сенсорные устройства и их свойства
Внешний вид физического сенсорного устройства представлен ЗО-объектом в мире MAR. Кроме того, должны быть представлены его свойства, включая визуальные или другие сенсорные и физические свойства. В реальном мире существует множество типов физических сенсоров. Каждый физический сенсор должен быть представлен в виде типа физического сенсора вместе с его внешним видом и физическими свойствами.
6.2.5 Интерфейсы с трехмерными сенсорными объектами
Пользовательские интерфейсы для управления физическими сенсорами должны быть включены в мир MAR. Они влияют на визуальную и другую воспринимаемую информацию о физических сенсорах в мире MAR. С помощью пользовательских интерфейсов можно по-разному представить внешний вид физических сенсоров.
6.2.6 Интерфейсы с физическими сенсорными устройствами
Интерфейсы для импорта и экспорта информации в физические сенсорные устройства и обратно должны быть представлены в мире MAR. Для представления физических свойств сенсора в мире MAR должен быть предусмотрен механизм получения событий от каждого сенсорного устройства. Должны быть представлены все события, получаемые от физических сенсорных устройств.
7 Определение представления физического сенсора на языке разметки XML
7.1 Структура сцены смешанной и дополненной реальности
7.1.1 MARSceneMARScene состоит из набора MARObjects, информации системы GNSS и информации о местоположении.
7.1.2 MARObject
MARObject состоит из ЗО-объекта и физических сенсоров. Информация о физическом сенсоре и информация системы GNSS является необязательной.
7.1.3 3D object
3D object имеет форму.
7.1.4 Shape
Shape состоит из Material, Geometry и InterfaceWithVirtualWorlds. Физические свойства определяются по-разному в зависимости от типа сенсора и ориентации.
7.1.5 Physical sensor
Physical sensor состоит из Shape, Sensor type, Physical properties, Physical interface, Location и Orientation.
7.1.6 Sensor type
Sensor type — это абстрактный супертип всех типов сенсоров, который включает в себя свойства, общие для всех физических сенсоров.
7.1.7 Physical properties
Physical properties содержит дочерние элементы, включая UUID, Name, EventType, ControlType и Desc.
7.1.8 Physical interface
Physical interface имеет элемент Connection, который содержит дочерние элементы, включая Name, Desc, IP, Port, ID, Password и Protocol.
7.2 Определение схемы XML
7.2.1 MARSceneTypeMARSceneType состоит из Location (начало координат, ограничивающий прямоугольник), Orientation и набора MARObjects (см. рисунок 31).
MARScene
-----►
MARSceneType
GeoOrigin
[0..1] GeoPositionType
GeoBoimdingBox
[0..1] GeoBoundingBoxType
Orientation
[0..1] OrientationType
MARObject
[0..*] MARObjectType
< с omplexT уре name="MARSceneТуре”>
<sequence>
<element name="GeoOrigin” type="mar:GeoPositionType" minOccurs=”0" />
<element naine= "GecBonndingBcx " type= "mar: GeoBcnndingBcxType "
minOccurs="0"/>
<element name=”Orientation" type="mar:OrientationType" minOccurs=”0" />
<element name= "MARObject" t ype= "mar ;MARObjectType " minOccurs= ”0 " maxOacurs="unbounded" />
</sequence>
</complexType>
Рисунок 31 —Тип MARScene
7.2.2 GeoPositionType
GeoPositionType представляет, как показано на рсиунке 32, позицию по системе GNSS, состоящую из значений широты и долготы.
GeoPositionType |
lat LatitudeType Ion LongitudeType |
<complexType name="GeoPosi tion Type">
<annotation>
«documentation> Широта и долгота геопозиции
«/documentation
</annotation>
<attribute type="mar:LatitudeType" name="lat" use="required" /> «attribute type="mar; Longitude Type" name-"lon" use-”required" />
</comp1exType>
Рисунок 32 — Тип GeoPosition
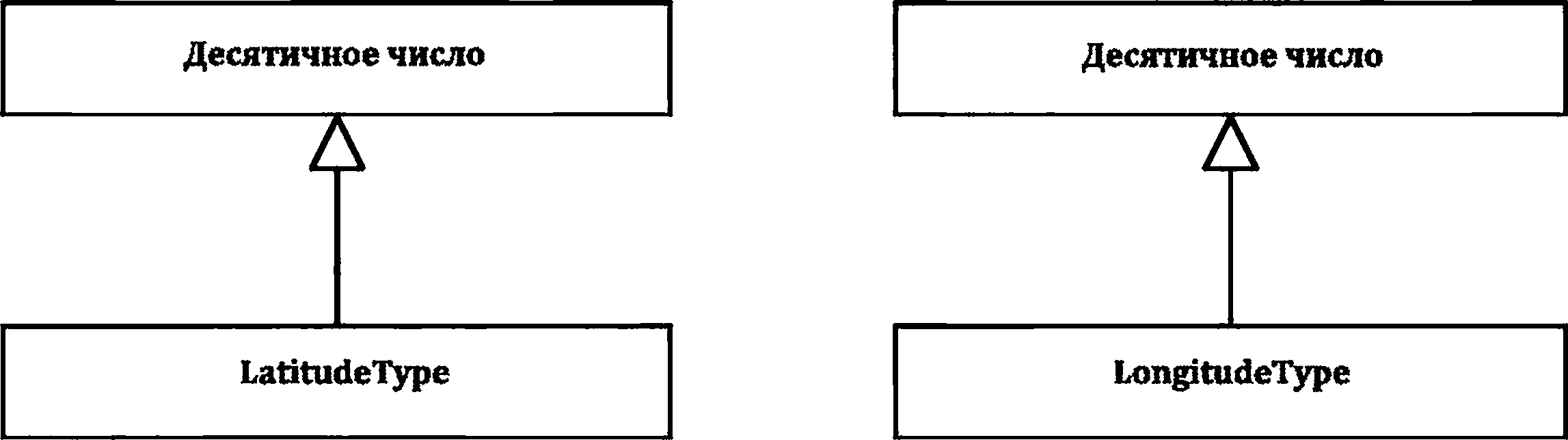
7.2.3 LatitudeType и LongitudeType
Типы широты и долготы, как показано на рисунке 33, определяются двумя значениями соответственно.
<simpleType name="LatitudeType”>
cannotation>
Cdocumentation> Широта указывается в десятичных градусах и в системе координат WGS84.
с/documentation
</annotation>
crestriction base= ''decimal ">
<minlnclusive value="-90.0” />
Cmaxlnclusive value=”90.0” />
</restriction>
</simpleType>
<simpleType name=”LongitudeType”>
crestriction base="decimal">
cminlnclusive value="-150.0" />
Cmaxlnclusive value="130.0” />
</restriction>
c/simpleType>
Рисунок 33 — Типы широты и долготы
7.2.4 GeoBoundingBoxType
GeoBoundingBoxType, как показано на рисунке 34, определяется четырьмя геопозициями и тремя значениями длины с общей единицей измерения.
GeoBoundingBoxType | |
Positionl | GeoPositionType |
Position2 | GeoPositionType |
Positions | GeoPositionType |
Position4 | GeoPositionType |
Length | LengthType |
«complexType name= '"GeoBoundingBoxType ">
<annotation>
<documentation> Информация ограничительного прямоугольника определяется четырьмя геопозициями и тремя длинами с единицей измерения </documentation>
</annotation>
<sequence>
<element name="Positionl" type="mar:GeoPosition Type" />
«element name="Position2" type="mar: GeoPositionType" !>
«element name="Position3” type="mar:GeoPosition Type" />
«element name="Position4"
type="mar:GeoPosition Type" />
«element name="Length"
type= "ma r: Length Type " />
</sequence>
</complexType>
Рисунок 34 — Тип GeoBoundingBox
7.2.5 LengthType
LengthType, как показано на рисунке 35, определяется тремя значениями длины с единицей измерения.
LengthType
х float
У float
z float
единица (umtType)
ccomplexType name="LengthType">
<attribute name="Fxnr type= "float” use="required” />
<attribute name="y" type^”float” use=”required” />
<attribute name="z” type="float" use=”required" />
<attribute nain.e= "unit" use="optional" default=”m">
<simpleType>
<restriction base="stringn>
Enumeration value="pm" /Xenumeration value=wmnw />
Enumeration value= "urn" /xenumeration value= "run" /> Enumeration value= "cm" />...
</restriction>
</simpleType>
</attribute>
</complexType>
Рисунок 35 — Тип длины
7.2.6 OrientationType
OrientationType, как показано на рисунке 36, определяется тремя десятичными градусами (тангаж, рысканье, крен).
OrientationType
Тангаж DegreeType
Рыскание DegreeType
Крен DegreeType
Десятичное число | |
DegreeType | |
<сomp1exTуре name= "OrientationТуре">
<sequence>
<element name="Pitch” type=”mar:DegreeType” />
<element name= "Yaw" type="mar:DegreeType” />
<element name= "Roll” type="mar:DegreeType" />
</sequence>
</complexType>
<simpleType name="DegreeType">
<restriction base="decimal">
<minInclusive value="0.0" />
<maxInclusive value="360. 0" />
</restriction
</simpleType>
Рисунок 36 — Тип ориентации
7.2.7 MARObjectType
MARObjectType, как показано на рисунке 37, состоит из элементов ThreeDObject и PhysicalSensor. Элемент PhysicalSensor является опциональным.
MARObjectType
ThreeDObject ThreeDObjectType
PhysicalSensor [0..1] AbstractSensorType
<comp 1 exType name=”MARObj e c t T ype ’’ >
<sequence>
<element name="ThreeDObject" type="tns:ThreeDObjectType" />
<element name="PhysicalSensor" type="tns:AbstractSensorType" maxOccurs=’,l*1 minOccurs="0" />
</sequence>
</complexType>
Рисунок 37 — Тип MARObject
7.2.8 ThreeDObjectType
ThreeDObjectType, как показано на рисунке 38, состоит из элемента Shape.
ThreeDObjectType |
Shape ShapeType |
CcomplexType name="ThreeDObj ectType">
<sequence>
<element name=”Shape" type="mar:ShapeType" />
</sequence>
</complexType>
Рисунок 38 — Тип ЗО-объекта
7.2.9 ShapeType
ShapeType, как показано на рисунке 39, состоит из элементов Material, Geometry и InterfaceWithVirtualWorlds.
ShapeType | ||
Material | [О-*] | MaterialType |
Geometry | [0.*] | GeometryType |
InterfaceWithVirtualWorlds | [0.*] | InterfaceWithVirtualWorldsType |
CcomplexType name=” ShapeType ">
<sequence>
<element name="Material" type="tns:MaterialType" maxOccurs="unbounded" min0ccurs="0" />
<element name="Geometry" type="tns:GeometryType" maxOccurs="unbounded" min0ccurs="0" />
<e1ernent name="InterfaceWithVirtua1Worids"
type="tns:InterfaceWithVirtualWorldsType”
maxOccurs="unbounded" minOccurs="0" />
</sequence>
/complexType>
Рисунок 39 — Тип формы
7.2.10 AbstractSensorType
AbstractSensorType — это супертип для всех типов сенсоров. Он включает в себя свойства, общие для всех сенсоров (см. рисунок 40). Id — идентификатор каждого сенсора. Activated означает активное состояние сенсора. Shape — это геометрические данные. SensorType имеет следующие перечисляемые значения: {Typel, Туре2, ..., Туре15}. PhysicalProperties обозначает общие свойства. Физические свойства каждого сенсора определяются для каждого типа сенсора. Физический интерфейс имеет интерфейс с реальным миром. Orientation содержит информацию о тангаже, рыскании и крене.
AbstractSensorType | |
id | ID |
activated | логическое значение |
SensorType | (SensorTypeType) | |
Shape | [0,1] | ShapeType |
PhysicalProperties | [0,1] | PhysicalPropertiesType |
Physicalinterface | [0,1] | PhysicallnterfaceType |
Orientation | [0Л] | OrientationType |
«complexType name=" Abs tract Sens or Type ”>
<sequence>
«element name="SensorType">
<simpleType>
«restriction base= "string">
«enumeration | value="Camera" /> |
«enumeration | value="Chemical" /> |
«enumeration | value="Electric” /> |
«enumeration | value= "Environment" , |
«enumeration | value="Flow" /> |
«enumeration | value="Force" /> |
«enumeration | value="Light" /> |
«enumeration | value= "Movement" /> |
«enumeration | value= "Navigation" |
«enumeration | value= "Particle" /> |
«enumeration | value="Position" /> |
«enumeration | value="Pressure” /> |
«enumeration | value="Proximity” /> |
«enumeration | value="Sound" /> |
«enumeration | value="Temperature” , |
«enumeration «/restriction> | value="Others” /> |
</simpleType>
</element>
< element name="Shape" type="mar:ShapeType" minOccurs="0"/>
«element name="Physical Properties" type="mar:PhysicalPropertiesType" minOccurs=wO" />
«element name="PhysicalInterface” type="mar:PhysicalInterfaceType" minOccurs=”0"/>
«element name=”Orientation” type=”mar:OrientationType” min0ccurs=”0” />
</sequence>
<attribute name="id" type="ID" />
«attribute name="activated" type="boolean" f>
</complexType>
7.2.11 PhysicalPropertiesType
PhysicalPropertiesType содержит элемент Device с дочерними элементами, включая UUID, Name, EventType, ControlType и Desc (см. рисунок 41).

<complexType name= "PhysicalPropertiesType">
<sequence>
<еlement name="Device ">
<complexType>
<sequence>
<element nane="UUID" type=nmar:UUIDType” />
<element name=”Name" type=”string” />
< e 1 erne nt name= "Even t Type " type= "ma r: Even t Type " minOccurs="0"/>
<element name="ControlType" type="mar:ControlType" minOccurs="0"/>
<element name=wDesc" type="string” minOccurs-"0" />
</sequence>
</complexType>
</element>
</sequence>
</complexType>
Рисунок 41 — Тип физических свойств
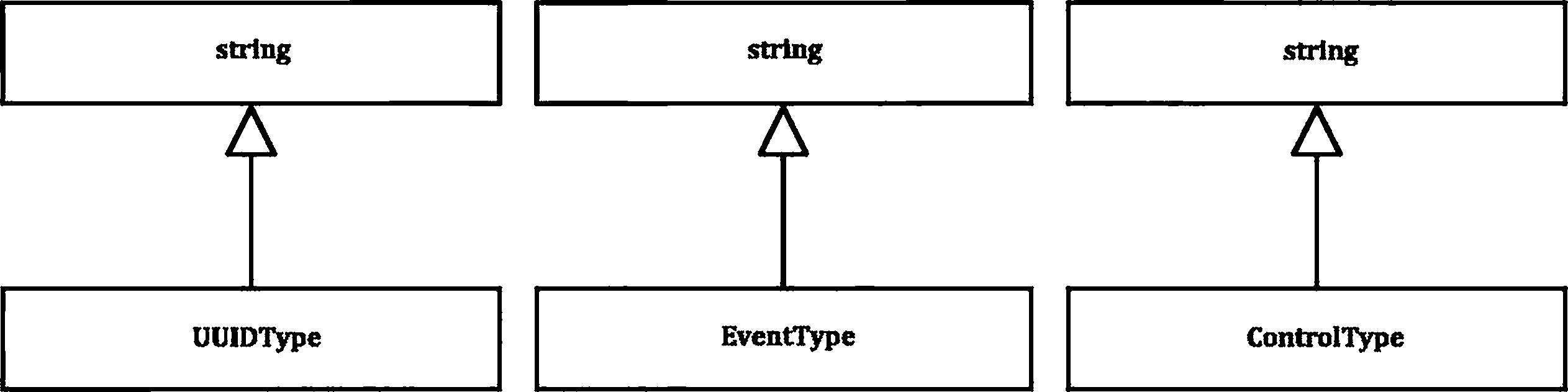
7.2.12 UUlDType, EventType и ControlType
UUlDType, EventType и ControlType определены, как показано на рисунке 42.
<complexType name="PhysicalInterfaceType">
<sequence>
<element name="Connection">
<comp1exType>
<sequence>
<element name="Name" type="string" />
<element name="Desc" type="string" min0ccurs=”0" />
<element name="IP" type="mar:IPAddressType" />
<element name="Port" type="mar:PortType" />
<element name="ID" type="string" />
<element name="Password" type="string" />
<elenient name="Protocol" type="string" />
</sequence>
</complex!ype>
</element>
</sequence>
</complexType>
Рисунок 42 — Типы UUID, Event и Control
7.2.13 PhysicallnterfaceType
PhysicallnterfaceType содержит элемент Connection с дочерними элементами, включая Name, Desc, IP, Port, ID, Password и Protocol, как показано на рисунке 43.
(ConnectionType) | ||
PhysicallnterfaceType | ||
Name string Desc string IP IPAddressType Port PortType ID string Password string Protocol string | ||
Connection (ConnectionType) | ||
ccomplexType name="PhysicalInterfaceType">
<sequence>
<element name="Connection">
<complexType>
<sequence>
<element name="Name" type="string" />
<element name="Desc" type="string" minOccurs="0” />
<element name="IP" type=”mar:IPAddressType" />
<element name="Port" type="mar:PortType" />
<element name="ID" type="string" />
<element name="Password" type="string” />
<element name="Protocol" type="string" />
</sequence>
</complexType>
</element>
</sequence>
</complexType>
Рисунок 43 — Тип физического интерфейса
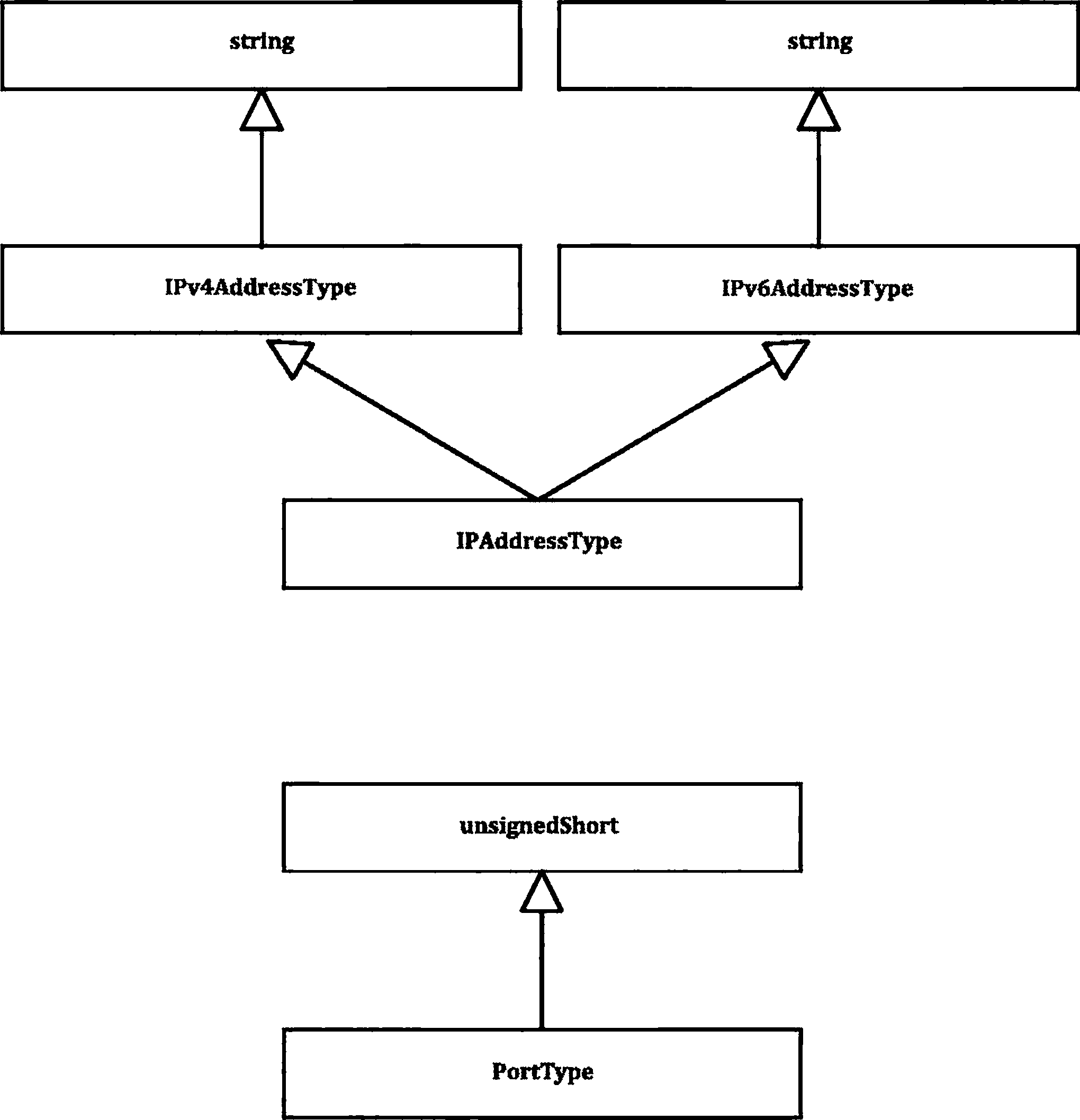
7.2.14 IPAddressType и PortType
IPAddressType и PortType определены, как показано на рисунке 44.
<simpleType name="IPAddressType">
Cunion memberTypes=,'mar: IPv4AddressType mar: IPvSAddressType" />
</simpleType>
CsimpleType name="IPv4AddressType”>
crestriction base="string">
cpattern value="((25[0-5]|2[0-4][0-9]11[0-9][0-9]I[1-9][0-9]I[0-9]).} {3}(25[0-5] |2[0-[0-9] 11[0-9][0-9] | [1-9] [0-9] | [0-9])” />
c/restriction>
</simpleType>
CsimpleType name="IPv6AddressType’’>
crestriction base="string’’>
cpattern value="(([0-9a-fA-F]{1,4}:){7,7}[0-9a-fA-F]{1,4}|([0-9a-fA-F]{1,4}:) {1,7}:|([0-9a-fA-F]{1,4}:){1,6}:[0-9a-fA-F]{1,4}|([0-9a-fA-F]{1,4}:){1,5}(:[0-9a-fA-F] {1,4}}{1,2}|([0-9a-fA-F]{1,4}:){1,4}(:[0-9a-fA-F]{1,4}}{1,3}|([0-9a-fA-F]{1,4}:){1,3} (:[0-9a-fA-F]{1,4}}{1,4}|([0-9a-fA-F]{1,4}:){1,2}(:[0-9a-fA-F]{1,4}){1,5}|[0-9a-fA-F] {1,4}:((:[0-9a-fA-F]{1,4}) {1,6}) | : ((:[0-9a-fA-F]{1,4}){1,7}|:)|fe80:(:[0-9a-fA-F]{0,4}) {0,4}%[0-9a-zA-Z]{1,}|::(ffff(:0{l,4}){0,1}:){0,1}((25[0-5]|(2[0-4]|l{0,1}[0-9]){0,1} [0-9]}.}{3,3}(25[0-5]|(2[0-4]|1{0,1}[0-9]){0,1}[0-9])|([0-9a-fA-F]{1,4}:){1,4}:((25[0-|(2[0-4]|1{0,1}[0-9]}{0,1}[0-9]).){3,3}(25[0-5]|(2[0-4]|1{0,1}[0-9]){0,1}[0-9]))” />
c/restriction>
c/simpleType>
CsimpleType name="PortType’l,>
crestriction base=”unsignedShort">
cminlnclusive value="l" />
C/restriction>
</simpleType>
Рисунок 44 — Типы IPAddress и Port
В приложении В определена схема XML для представления графа сцены MAR на основе сенсоров. В приложении С содержится пример расширения схемы для представления физических свойств типов сенсоров на основе схемы, определенной в приложении В. В приложении D приводится пример представления сенсоров в виртуальной среде MAR с использованием XML на основе схемы сенсоров MAR, определенной в приложениях В и С. В приложении Е содержатся два примера эмуляции и визуализации функций сенсоров с использованием ЗО-сцены.
8 Согласованность
8.1 Критерии согласованности
Обеспечение согласованности представления сенсоров заключается в определении параметров общего использования и обмена информацией сенсоров в ЗО-сцене между приложениями и между гетерогенными вычислительными средами. Следует обратить внимание на следующие моменты:
- данные сенсоров с использованием ЗО-сцен определяют местоположение с ориентацией, внешним видом и функциональными параметрами каждого сенсора;
- сенсоры классифицируются на основе репрезентативных типов сенсоров, каждый сенсор распознается как определенный тип сенсора вместе с его функциональными параметрами;
- сенсор определяется как объект, который состоит из данных о внешнем виде, входящих и исходящих сигналов или потоков для представления функциональных параметров;
- сенсоры и трехмерные данные организуются на основе иерархии структуры данных MAR с сенсорами, которые могут быть представлены и распознаны в ЗО-сцене.
8.2 Область согласованности
Согласованность необходимо учитывать для следующих компонентов, включая информацию сенсоров и ЗО-информацию:
- наборы данных сенсоров, включая генерируемые и передаваемые данные о ЗО-среде;
- трехмерные средства просмотра сенсоров, отображающие сами сенсоры и ЗО-среды;
- ЗО-редакторы сенсоров, которые генерируют, отображают, эмулируют и модифицируют ЗО-сцены с сенсорами.
Приложение А (справочное)
Примеры типов и параметров физических сенсоров
А.1 Общие положения
В данном приложении приведены примеры типов физических сенсоров и параметров с указанием единиц измерения и типа данных.
Для каждого типа сенсора ниже в соответствующей таблице приведены типичные параметры управления данным типом сенсора. Для них должны быть предусмотрены пользовательские интерфейсы, включая элементы управления для включения или выключения сенсора, а также для инициирования действий, характерных для конкретного типа сенсора.
Для каждого типа сенсора его физические функции могут быть представлены и имитированы с помощью параметров согласно следующей стандартной процедуре:
- включение сенсора с помощью элемента управления в ЗО-сцене;
- представление и изменение значений параметров сенсора с помощью различных видов управления;
- отображение изменений в сцене на основе изменения значений параметров;
- выключение сенсора с помощью элемента управления.
Особенности и отличия от этой общей процедуры описаны в разделе, посвященном конкретному типу сенсора.
А.2 Сенсор камеры
Типичные параметры управления устройствами камеры приведены в таблице А.1. Для них должны быть предусмотрены пользовательские интерфейсы, включая элементы управления ориентацией и масштабированием камеры. Если в сцене используется несколько сенсоров камер, необходимо также предусмотреть средства управления для выбора, отображения и управления конкретными сценами камер.
После включения устройства камеры одними из типичных действий являются изменение ориентации камеры и увеличение или уменьшение масштаба.
В таблицах А.1—А.15 используются следующие обозначения:
- int: целое число;
- float: число с плавающей запятой;
- string: тип данных, указывающий последовательность символов в компьютерном программировании.
Таблица А.1 — Параметры устройства сенсора камеры
Параметр | Единица измерения | Тип данных |
Ширина | мм | float |
Высота | мм | float |
Диагональ | мм | float |
Соотношение сторон | — | int |
Количество пикселей | — | int |
Количество мегапикселей | — | int |
Количество пикселей по горизонтали | — | int |
Количество пикселей по вертикали | — | int |
Размер пикселя | мкм | float |
Частота обновления кадров | fps (кадров в секунду) | int |
Динамический диапазон | ДБ | float |
Напряжение питания | В | float |
Потребляемая мощность | мВт | int |
Рабочая температура | °C | float |
А.З Химический сенсор
Типичные параметры управления химическими сенсорами приведены в таблице А.2.
После включения химического сенсора одним из стандартных действий является контроль содержания газа или жидкости, например кислорода.
Таблица А.2 — Параметры устройства химического сенсора
Параметр | Единица измерения | Тип данных |
Диапазон обнаружения | ч/млн | float |
Точность | % | int |
Выходной сигнал | мА | int |
Настройка сигнала тревоги | ч/млн | int |
Сброс сигнала тревоги | ч/млн | int |
Заданное значение сигнала тревоги | — | int |
Обнаруживаемый газ | — | string |
Напряжение питания | В | float |
Потребляемая мощность | мВт | int |
Рабочая температура | °C | int |
Рабочая влажность | % | int |
А.4 Электрический сенсор
Типичные параметры управления электрическими сенсорами приведены в таблице А.З.
После включения электрического сенсора одним из типичных действий является предоставление значений параметров.
Таблица А.З — Параметры электрического сенсора
Параметр | Единица измерения | Тип данных |
Напряжение | В | float |
Частота | ГЦ | float |
Диапазон | мм | int |
Рабочая температура | °C | int |
Рабочая влажность | % | int |
Точность | % | float |
А.5 Сенсор среды
Физические функции сенсора среды представлены и имитированы с помощью параметров (см. таблицу А.4) согласно следующей процедуре:
- включение сенсора среды с помощью элемента управления в ЗО-сцене;
- представление значений параметров сенсора в случае их изменений в соответствии с каждым подключенным устройством сенсора;
- выключение сенсора с помощью элемента управления.
Таблица А.4 — Параметры сенсора среды
Параметр | Единица измерения | Тип данных |
Температура окружающей среды | °C | int |
Освещенность | лк | float |
Окончание таблицы А.4
Параметр | Единица измерения | Тип данных |
Давление | гПа | int |
Относительная влажность | % | int |
Температура | °C | int |
А.6 Сенсор расхода
Типичные параметры управления сенсорами расхода приведены в таблице А.5.
После включения сенсора расхода одним из типичных действий является представление значений параметров по мере их изменения.
Таблица А.5 — Параметры сенсора расхода
Параметр | Единица измерения | Тип данных |
Напряжение | В | int |
Максимальный ток | мА | int |
Вес | г | int |
Внешние диаметры | мм | int |
Расход | л/мин | int |
Рабочая температура | °C | int |
Температура жидкости | °C | int |
Рабочая влажность | % относительной влажности | int |
Рабочее давление | мПа, кПа | float |
А.7 Сенсор силы
Типичные параметры управления сенсорами силы приведены в таблице А.6.
После включения сенсора силы одним из типичных действий является представление значений параметров по мере их изменения.
Таблица А.6 — Параметры сенсора силы
Параметр | Единица измерения | Тип данных |
Толщина | мм | float |
Длина | мм | int |
Ширина | мм | int |
Область измерений | мм2 | float |
Разъем | Контакт | int |
Диаметр | мм | float |
Чувствительность | Н (г, кг) | float |
Повторяемость | % | float |
Рабочая температура | °C | int |
А.8 Сенсор освещенности
Типичные параметры управления сенсорами освещенности приведены в таблице А.7.
После включения сенсора освещенности одним из типичных действий является представление значений параметров по мере их изменения. При использовании некоторых устройств освещения, таких как уличные фонари, ЗО-сцена должна меняться автоматически, т. е. устройство включается или выключается автоматически на основе обнаружения света сенсором.
Таблица А.7 — Параметры сенсора освещенности
Параметр | Единица измерения | Тип данных |
Напряжение | В | float |
Обратный ток | мА | float |
Коллекторный ток | мА | float |
Напряжение коллектор-эмиттер | В | float |
Время нарастания или спада | мс | float |
Диапазон измерений | лк | float |
Рабочая температура | °C | int |
А.9 Сенсор движения
Типичные параметры управления сенсорами движения приведены в таблице А.8.
После включения сенсора движения одним из типичных действий является представление значений параметров по мере их изменения. В зависимости от приложения, в ЗО-сцене может быть представлен сам сенсор движения. ЗО-объект может представлять сенсор движения и действовать как сенсор в сцене. В противном случае ЗО-сцена может меняться в соответствии с полученными представлениями или звуком под управлением интерфейса для параметров обнаруженного движения.
Таблица А.8 — Параметры сенсора движения
Параметр | Единица измерения | Тип данных |
Диапазон обнаружения движения | мм | int |
Разрешение | мкм | int |
Сила | Н | float |
Рабочая температура | °C | float |
Рабочая влажность | % | int |
Максимальная скорость срабатывания | м/мин | int |
Материалы | — | string |
Вес | г | float |
Расстояние обнаружения | м | float |
Угол обзора (по горизонтали) | о | float |
Угол обзора (по вертикали) | о | float |
А.10 Сенсор навигации
Типичные параметры управления сенсорами навигации приведены в таблице А.9.
После включения сенсора навигации одними из типичных действий являются представление значений параметров и отображение изменений в сцене на основе значений параметров на базе изменения информации системы GNSS и отображение пути к измененному местоположению. Может быть представлен ЗО-объект, использующий сенсор навигации, например смартфон или навигационная система автомобиля. В противном случае ЗО-сцена будет перемещаться и отображаться в соответствии с видом, управляемым интерфейсом для параметров навигации.
Таблица А.9 — Параметры сенсора навигации
Параметр | Единица измерения | Тип данных |
Диапазон используемых частот | Гц | int |
Диапазон резонансных частот | ГЦ | int |
Чувствительность приема | ДБ | int |
Диапазон горизонтальной направленности | ДБ, кГц | int |
Рабочая температура | °C | int |
Температура хранения | °C | int |
Напряжение питания | В | int |
Ток | мА | int |
А.11 Сенсор обнаружения частиц
Типичные параметры управления сенсорами обнаружения частиц приведены в таблице А.10.
После включения сенсора обнаружения частиц одним из типичных действий является представление значений параметров по мере их изменения. В ЗО-сцене частицы обычно используются для представления природных явлений, таких как дождь и снег. В зависимости от приложения, возможно представление самого сенсора обнаружения частиц — ЗО-объект может представлять сенсор обнаружения частиц и выступать в качестве сенсора в сцене. В противном случае ЗО-сцена будет меняться на основе полученных представлений или звука под управлением интерфейса для параметров обнаруженных частиц.
Таблица А.10 — Параметры сенсора обнаружения частиц
Параметр | Единица измерения | Тип данных |
Диапазоны считывания | mR | float |
Точность | % | ilnt |
Энергетическая чувствительность | Непрерывный мониторинг частиц (СРМ) | int |
Обнаружение | мэВ | float |
Счетчик Гейгера — Мюллера | мг/см2 | float |
Размеры | мм | int |
Вес | г | int |
Выход | мм | float |
Нормальный радиационный фон | Непрерывный мониторинг частиц (СРМ) | int |
Обнаруживаемый размер частиц | мкм | float |
Диапазон обнаружения (диапазон концентрации) | шт/л, мкм/м3 | int |
Напряжение питания | В | float |
Рабочая температура | °C | int |
Рабочая влажность | % | int |
А.12 Сенсор положения
Типичные параметры управления сенсорами положения приведены в таблице А.11.
После включения сенсора положения одним из типичных действий является представление значений параметров по мере их изменения. В ЗО-сцене моделирование самого сенсора положения не требуется. Вместо этого необходимо эмулировать функции сенсора и отобразить изменения в сцене, вызванные работой сенсора. Если сенсор положения моделируется, то на основе значений параметров сенсора в сцене распознается и эмулируется ЗО-объект.
Таблица А. 11 — Параметры сенсора положения
Параметр | Единица измерения | Тип данных |
Напряжение | В | float |
Диапазон частот | ГЦ | int |
Температура | °F | int |
Диапазон | °C | float |
Нулевое напряжение | % | float |
Допустимость вибрации | Гц | int |
А.13 Сенсор давления
Типичные параметры управления сенсорами давления приведены в таблице А. 12.
После включения сенсора давления одним из типичных действий является представление значений параметров по мере их изменения. В ЗО-сцене моделирование самого сенсора давления не требуется. Вместо этого необходимо эмулировать функции сенсора и отобразить изменения в сцене, вызванные работой сенсора. Если сенсор давления смоделирован, то на основе значений параметров сенсора в сцене распознается и эмулируется ЗО-объект.
Таблица А. 12 — Параметры сенсора давления
Параметр | Единица измерения | Тип данных |
Выходной диапазон | мВ | float |
Рабочая температура | °C | float |
Напряжение смещения | В | float |
Прогрев смещения | °C | float |
Время отклика | мкс | float |
Входное сопротивление | Ом | float |
Выходное сопротивление | Ом | float |
Диапазон давления | кПа | float |
Напряжение питания | В | float |
Точность | % | float |
Чувствительность | В/кПа | float |
А.14 Сенсор приближения
Типичные параметры управления сенсорами приближения приведены в таблице А.13.
После включения сенсора приближения одним из типичных действий является представление значений параметров по мере их изменения. В ЗО-сцене моделирование самого сенсора приближения не требуется. Вместо этого необходимо эмулировать функции сенсора и отобразить изменения в сцене, вызванные работой сенсора. Если сенсор приближения моделируется, ЗО-объект распознается и эмулируется в сцене на основе значений параметров сенсора.
Таблица А.13 — Параметры сенсора приближения
Параметр | Единица измерения | Тип данных |
Напряжение питания | мВ | int |
Диапазон измерения освещенности | В | int |
Дальность обнаружения приближения | мкВт/см2 | float |
Вариации чувствительности | % | float |
Рабочая температура | °C | int |
А.15 Сенсор звука
Типичные параметры управления сенсорами звука приведены в таблице А.14.
После включения сенсора звука одним из типичных действий является представление значений параметров по мере их изменения. В ЗО-сцене моделирование самого сенсора звука зависит от приложения. Если сцена содержит сенсор, необходимы представление и эмуляция его функций. Необходимо обеспечить представление и контроль полученного в результате работы сенсора звука изменения сцены. Если сенсор звука моделируется, то на основе значений параметров сенсора в сцене распознается и эмулируется ЗО-объект.
Таблица А.14 — Параметры сенсора звука
Параметр | Единица измерения | Тип данных |
Напряжение питания | В | int |
Ток питания | мА | int |
Коэффициент усиления напряжения (А) | ДБ | int |
Чувствительность микрофона | ДБ | int |
Импеданс микрофона | кОм | float |
Частота микрофона | Гц | int |
Отношение «сигнал/шум» микрофона | ДБ | int |
Снижение чувствительности микрофона | ДБ | int |
А.16 Сенсор температуры
Типичные параметры управления сенсорами температуры приведены в таблице 15.
После включения сенсора температуры одним из типичных действий является представление значений параметров по мере их изменения. В ЗО-сцене моделирование самого сенсора температуры зависит от области применения. Если сцена содержит сенсор, необходимы представление и эмуляция его функций. Необходимо обеспечить представление и контроль полученного в результате работы сенсора температуры изменения сцены. Если сенсор температуры моделируется, то на основе значений параметров сенсора в сцене распознается и эмулируется ЗО-объект.
Таблица А. 15 — Параметры сенсора температуры
Параметр | Единица измерения | Тип данных |
Напряжение питания | В | float |
Ток питания | мА | float |
Рабочая температура | °C | float |
Точность измерения температуры | °C | float |
Температурное разрешение | °C | float |
Приложение В (справочное)
Схема представления сенсора MAR
XML-схема, представленная на странице http://standards.iso.org/iso-iec/18038/ed-1/en, предназначена для графа сцены MAR на основе сенсоров.
Приложение С (справочное)
Пример расширения XML-схемы для представления физических сенсоров
Физические свойства и типы потоковых данных ввода/вывода для разных типов сенсоров выражаются переменными, поскольку отдельные сенсоры могут иметь свой собственный набор параметров. Чтобы создать определение схемы, необходимы минимальное количество общих абстрактных типов и расширение схемы, а также типы данных для всех параметров, требуемых для конкретного сенсора, который будет использоваться в системе MAR.
На странице http://standards.iso.org/iso-iec/18038/ed-1/en представлен пример расширения схемы для представления физических свойств типов сенсоров на базе схемы, указанной в приложении В.
Приложение D (справочное)
Пример представления сенсора MAR на основе схемы сенсора MAR
На странице http://standards.iso.org/iso-iec/18038/ed-1/en содержится пример схемы представления сенсоров в виртуальной среде MAR с использованием XML на базе схемы сенсоров MAR, указанной в приложениях В и С.
Приложение Е (справочное)
Примеры реализации представления сенсора MAR
Е.1 Общие положения
В данном приложении демонстрируются два варианта использования в качестве примеров эмуляции и визуализации функций сенсоров с помощью трехмерного пространства. В первом случае сенсорные устройства используются внутри помещения (сенсоры камеры, сенсоры среды, сенсоры света и звука), а во втором — снаружи (сенсоры камеры, сенсоры света и приближения).
Е.2 Представление сенсоров внутри помещения
Этот вариант использования включает в себя сенсор камеры, сенсор света, сенсор среды и сенсор звука. Сенсоры и их функции представлены в виртуальном трехмерном мире. Цель представления — визуальная и удаленная эмуляция и мониторинг функций сенсоров в сетевой среде. На рисунках Е.1—Е.4 показаны сцены с рабочими сенсорами, которые выполняют потоковую передачу данных.
Ниже приводится подробное описание этого варианта использования:
- трехмерная сцена отражает реальный мир, в котором осуществляется управление контролируемыми сенсорами. В зависимости от приложения и типа сенсоры могут быть представлены в сцене в виде ЗО-формы. В данном варианте использования все четыре сенсора имеют трехмерные формы и визуально представлены в сцене;
- функции сенсора освещенности визуализируются в сцене. Например, функция «Вкл» делает сцену яркой в зависимости от интенсивности сенсора освещенности. Интенсивность можно регулировать и отображать с помощью пользовательского интерфейса, который может посылать сигналы сенсору освещенности;
- функции сенсора среды отображаются в сцене. Например, информация о температуре и влажности отображается в сцене в текстовом виде. В других случаях информация может отображаться внутри ЗО-формы сенсорного устройства, представленного в сцене. В сцене можно представить сигналы «Вкл» и «Выкл», поступающие от сцены MAR к сенсору среды;
- сенсор камеры системы видеонаблюдения фиксирует изменения в реальном мире с целью контроля безопасности. Для визуального контроля функций сенсора камеры необходима дистанционная система, работающая в режиме онлайн. Среди функций сенсора камеры могут быть захват и передача видео. Система может отображать видео и посылать сигнал на сенсор камеры, чтобы останавливать или менять направление системы видеонаблюдения;
- функции сенсора звука представляются в сцене. Например, динамик, принимающий звуковые сигналы через сенсор звука, генерирует звук с помощью своей звуковой функции. Регулировка громкости — еще один пример функции. В сцене можно представить сигналы «Вкл» и «Выкл», поступающие от сцены MAR к сенсору звука;
- все данные, включая данные о внешнем виде и функциях датчиков, должны быть структурированы таким образом, чтобы их можно было хранить, использовать, передавать и пересылать между приложениями и между гетерогенными вычислительными средами;
- должна быть возможность управлять всеми данными, генерируемыми во время работы датчиков, включая данные о внешнем виде и функциях, с помощью структуры данных MAR, определенной в настоящем стандарте.

Рисунок Е.1 — Эмуляция сенсоров в помещении и их представление в ЗО-сцене: сенсор освещенности
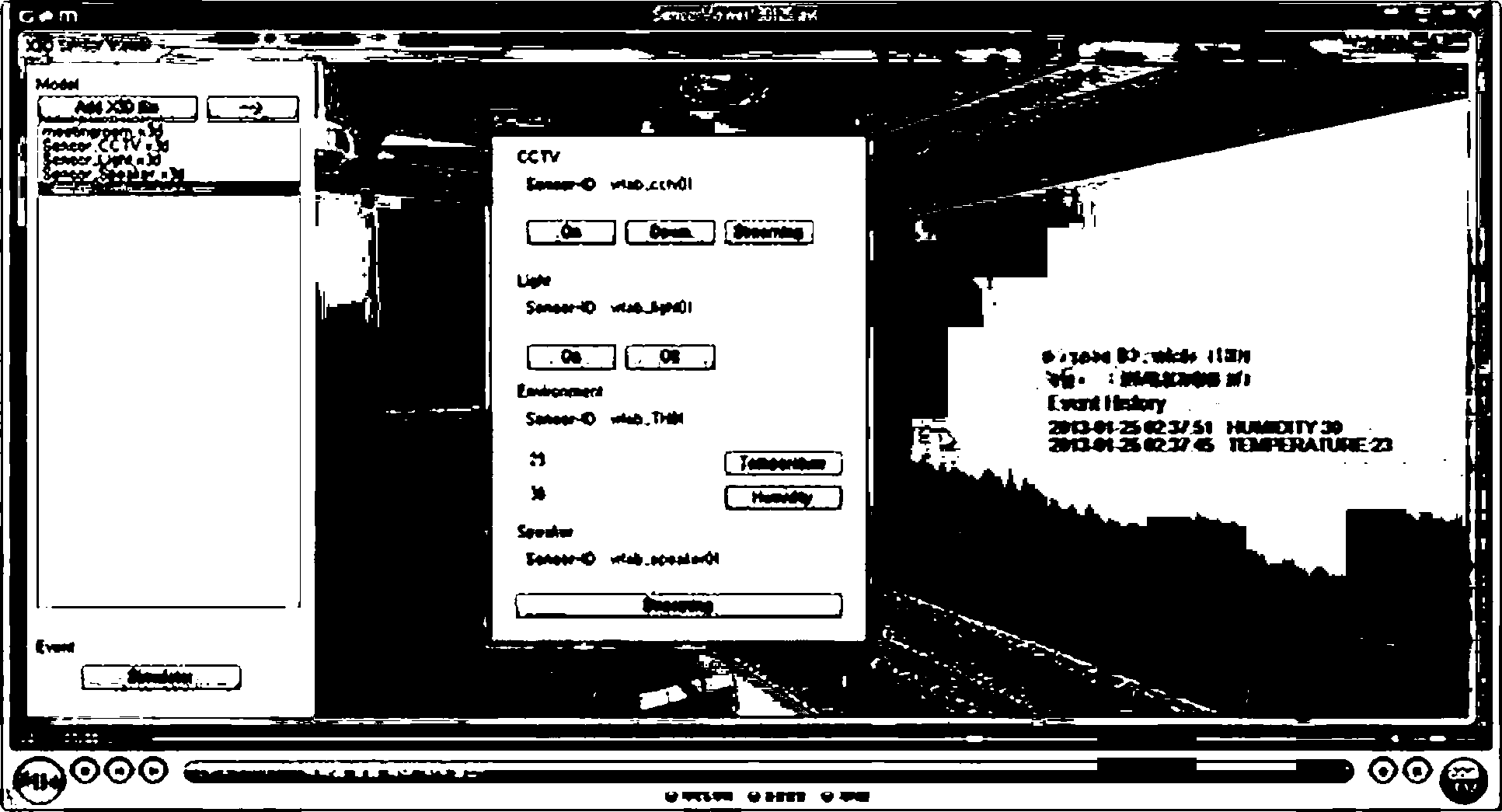
Рисунок Е.2 — Эмуляция сенсоров в помещении и их представление в ЗЭ-сцене: сенсор среды
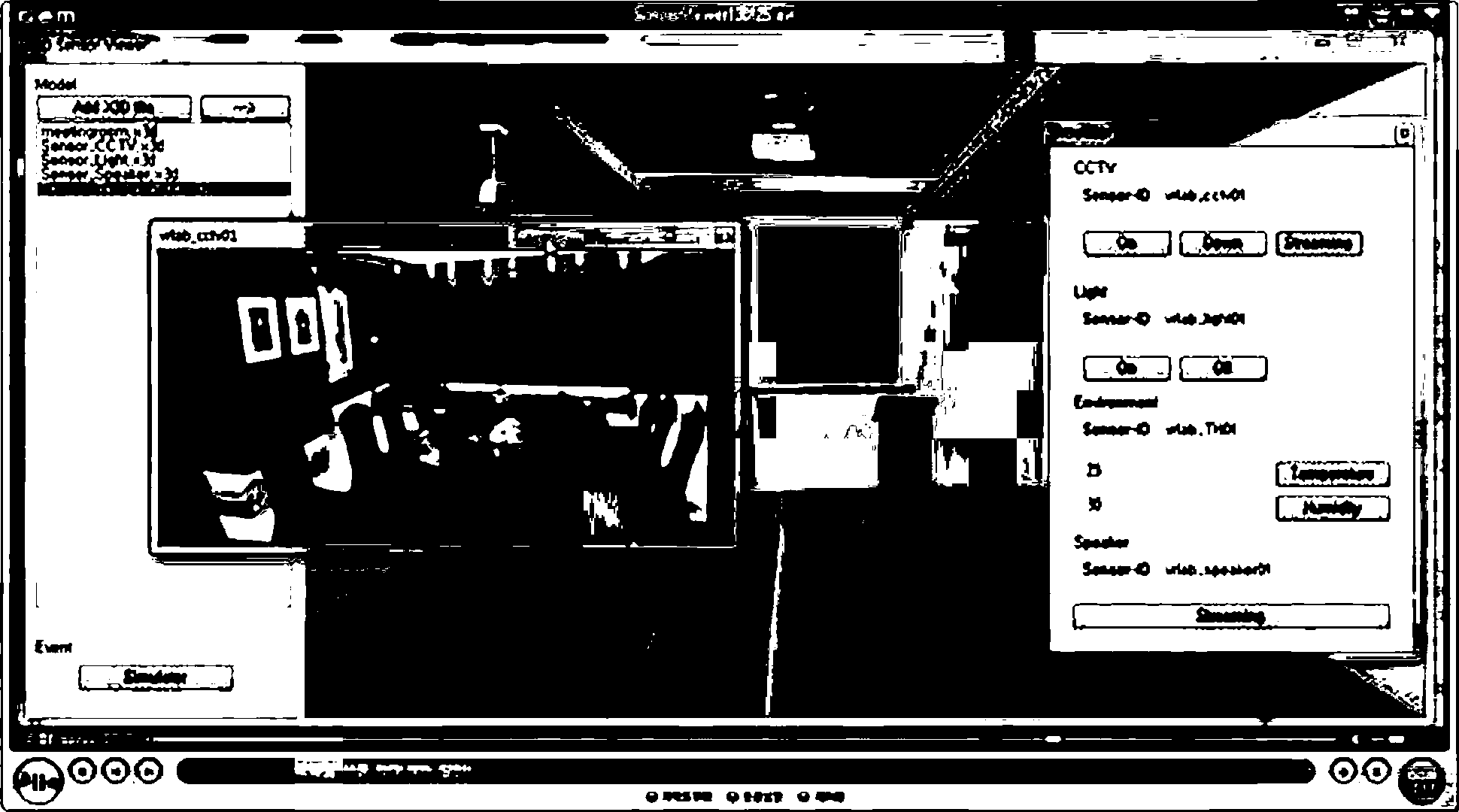
Рисунок Е.З — Эмуляция сенсоров в помещении и их представление в ЗЭ-сцене: сенсор камеры
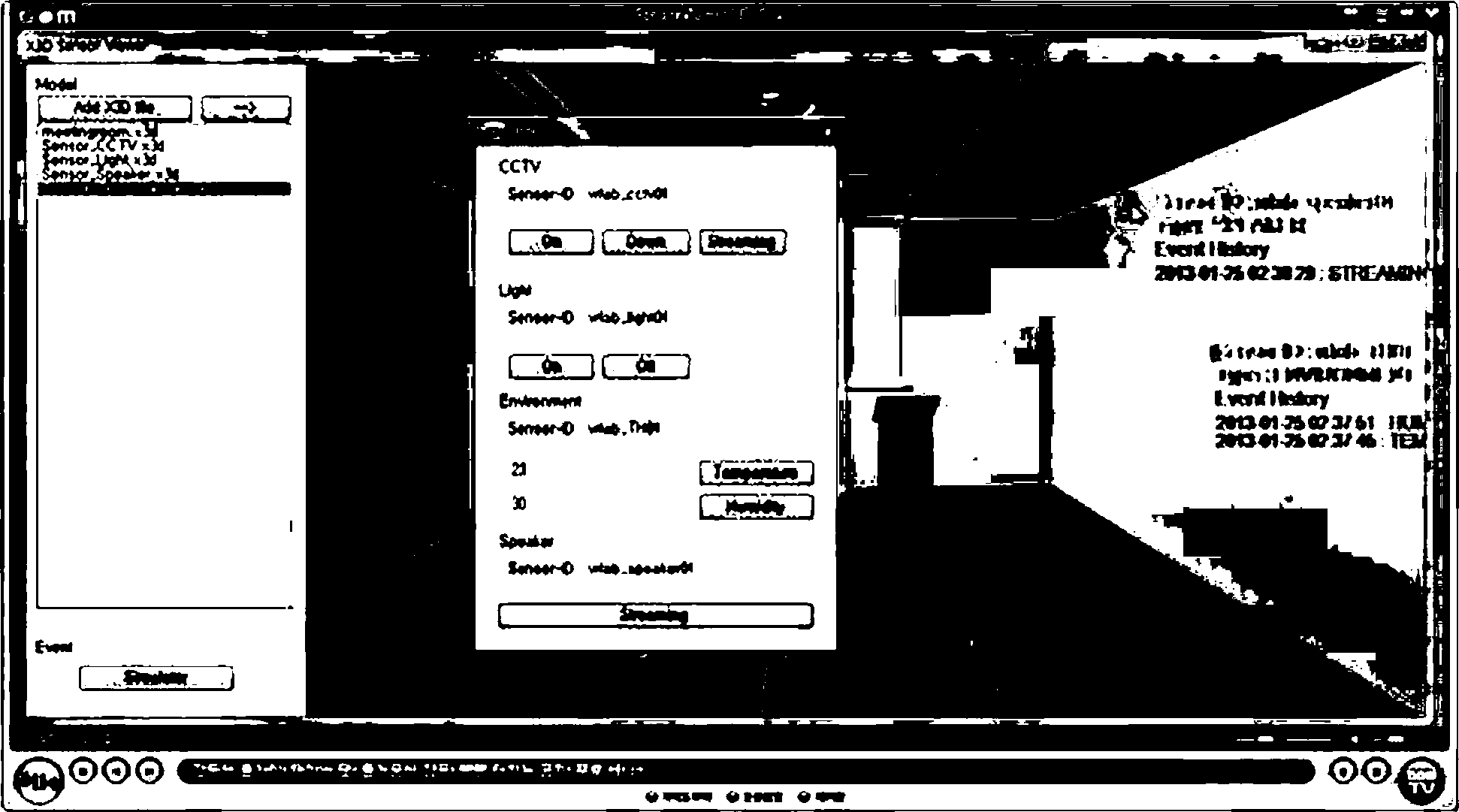
Рисунок Е.4 — Эмуляция сенсоров в помещении и их представление в ЗО-сцене: сенсор звука
Е.З Представление сенсора вне помещения
Этот вариант использования включает в себя сенсор камеры, сенсор освещенности и сенсор приближения. Сенсоры и их функции представлены в виртуальном трехмерном мире. На рисунках Е.5 и Е.6 показаны сцены с рабочими сенсорами, которые выполняют потоковую передачу данных.
Ниже приводится подробное описание этого варианта использования:
- трехмерная сцена отражает реальный мир, в котором осуществляется управление контролируемыми сенсорами. В зависимости от приложения и типа сенсоры могут быть представлены в трехмерной сцене в виде ЗО-формы. В данном варианте использования все три сенсора имеют трехмерные формы и визуально представлены в сцене;
- сенсор камеры системы видеонаблюдения фиксирует изменения в реальном мире с целью контроля безопасности. Для визуального контроля функций сенсора камеры необходима дистанционная система, работающая в режиме онлайн. Среди функций сенсора камеры могут быть захват и передача видео. Система может отображать видео и посылать сигнал на сенсор камеры, чтобы останавливать или менять направление системы видеонаблюдения;
- функции сенсора освещенности визуализируются в сцене. Внутри сенсора освещенности также находится невидимый сенсор приближения. Функции сенсора освещенности, такие как «Вкл» или «Выкл», представлены в сцене на базе сигнала, получаемого от сенсорного устройства. Кроме того, свет может включаться с помощью сенсора приближения, когда к сенсору приближается активный объект. Интенсивность можно регулировать и отображать с помощью пользовательского интерфейса, который может посылать сигналы сенсору освещенности;
- кроме того, предусмотрен видимый сенсор приближения с функцией датчика касания, представленный в трехмерной форме (например, RFID на входной двери). Функции этого сенсора приближения отличаются от функций сенсора приближения, находящегося внутри сенсора освещенности. В результате, к примеру, дверь открывается, когда активный объект приближается к сенсору. В сцене можно представить сигналы «Вкл» и «Выкл», поступающие от сцены MAR к сенсору среды;
- все данные, включая данные о внешнем виде и функциях датчиков, должны быть структурированы таким образом, чтобы их можно было хранить, использовать, передавать и пересылать между приложениями и между гетерогенными вычислительными средами;
- должна быть возможность управлять всеми данными, генерируемыми во время работы датчиков, включая данные о внешнем виде и функциях, с помощью структуры данных MAR, определенной в настоящем стандарте.
В течение некоторого периода времени после уведомления о прекращении трудовых отношений организация должна контролировать неавторизованное копирование соответствующей информации (например, интеллектуальной собственности) увольняемыми работниками и подрядчиками.

Рисунок Е.5 — Эмуляция сенсоров вне помещений и их представление в ЗО-сцене: сенсоры камеры и освещенности

Рисунок Е.6 — Эмуляция сенсоров вне помещений и их представление в ЗО-сцене: сенсоры приближения и звука
Библиография
[1] | ISO/IEC 11578 | Information technology — Open Systems Interconnection — Remote Procedure Call (RPC) |
[2] | ISO/IEC 14772-1 | Information technology — Computer graphics and image processing — The Virtual Reality Modeling Language — Part 1: Functional specification and UTF-8 encoding |
[3] | ISO 16739-1 | Industry Foundation Class (IFC) for data sharing in the construction and facility management industries — Part 1: Data schema |
[4] | ISO/IEC 18023-1 | Information technology — SEDRIS — Part 1: Functional specification |
[5] | ISO/IEC 18023-2 | Information technology — SEDRIS — Part 2: Abstract transmittal format |
[6] | ISO/IEC 18025 | Information technology — Environmental Data Coding Specification (EDCS) |
[7] | ISO/IEC 18026 | Information technology — Spatial Reference Model (SRM) |
[8] | ISO/IEC 18039 | Information technology — Computer graphics, image processing and environmental data representation — Mixed and augmented reality (MAR) reference model |
[9] | ISO/IEC 19775-1 | Information technology — Computer graphics, image processing and environmental data representation — Extensible 3D (X3D) — Part 1: Architecture and base components |
[Ю] | ISO/IEC 19775-2 | Information technology — Computer graphics, image processing and environmental data representation — Extensible 3D (X3D) — Part 2: Scene access interface (SAI) |
[11] Broring Arne, Echterhoff Johannes, Jirka Simon, Simonis Ingo, Everding Thomas, Stasch Christoph, Liang Steve, Lemmens Rob. New Generation Sensor Web Enablement, Sensors 2011, pp.2652-2699
[12] Banica Florinel-Gabriel. Chemical Sensors and Biosensors: Fundamentals and Applications. Chichester, UK: John Wiley & Sons. 2012
[13] Reed Carl, Botts Mike, Percivall George, Davidson John. OGC® Sensor Web Enablement: Overview And High Level Architecture, Open Geospatial Consortium, 2013-06-17
[14] Platt Charles. Encyclopedia of Electronic Components Volume 3: Sensors, Maker Media, Inc., 2016
[15] Simonis Ingo. OGC® Sensor Web Enablement Architecture, Open Geospatial Consortium Inc., 2008-08-20
[16] Lein James K. Environmental Sensing Analytical Techniques for Earth Observation, Springer, 2012
[17] Botts Mike, Robin Alexandre. OGC Sensor ML: Model and XML Encoding Standard, Open Geospatial Consortium
Inc., 2014-02-04
[18] Botts Mike, Robin Alexandre. OpenGIS Sensor Model Language (SensorML) Implementation Specification, Open Geospatial Consortium Inc., 2007-07-17
[19] Groves Paul D. Principles of GNSS, Inertial, and Multisensor Integrated Navigations Systems, Second Edition (GNSS Technology and Applications), Artech House, 2013
[20] IETF RFC 1630 Universal Resource Identifier in WWW
[21] IETF RFC 2141 Uniform Resource Name in WWW
УДК 006.34:004.056:006.354
ОКС 35.140
Ключевые слова: сенсоры, смешанная и дополненная реальность, физические сенсоры, ЗО-сцены
Редактор Л.В. Каретникова Технический редактор В.Н. Прусакова Корректор И.А. Королева Компьютерная верстка М.В. Малеевой
Сдано в набор 24.08.2023. Подписано в печать 04.09.2023. Формат 60х841/8. Гарнитура Ариал. Усл. печ. л. 6,98. Уч.-изд. л. 6,28.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении в ФГБУ «Институт стандартизации» , 117418 Москва, Нахимовский пр-т, д. 31, к. 2.
{kind=link}