ГОСТ Р 52865-2009
Группа Э50
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Глобальная навигационная спутниковая система
ПАРАМЕТРЫ РАДИОНАВИГАЦИОННОГО ПОЛЯ
Технические требования и методы испытаний
Global navigation satellite system. Parameters of radionavigation field. Technical requirements and test methods
ОКС 07.040
ОКСТУ 6811
Дата введения 2011-01-01
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. N 184-ФЗ "О техническом регулировании", а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 "Стандартизация в Российской Федерации. Основные положения"
Сведения о стандарте
1 РАЗРАБОТАН Открытым акционерным обществом "Информационные спутниковые системы" имени академика М.Ф.Решетнева" совместно с Открытым акционерным обществом "Российские космические системы"
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 363 "Радионавигация"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 декабря 2009 г. N 935-ст
4 ВЗАМЕН ГОСТ Р 52865-2007
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячно издаваемых информационных указателях "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
1 Область применения
Настоящий стандарт распространяется на параметры радионавигационного поля для сигнала в пространстве, предоставляемые потребителям при использовании канала стандартной точности глобальной навигационной спутниковой системы ГЛОНАСС с однородным созвездием из спутников "Глонасс-М", и устанавливает технические требования к ним и методы их испытаний.
Настоящий стандарт распространяется также на смешанное созвездие навигационных космических аппаратов "Глонасс-М" и "Глонасс-К".
2 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
2.1 канал стандартной точности (Channel of Standard Accuracy): Канал, обеспечивающий заданный уровень точности определения местоположения и времени, доступный любому пользователю системы ГЛОНАСС на глобальной и непрерывной основе.
2.2 рабочая зона системы (Service Volume): Пространство до высоты 2000 км, включая поверхность Земли, в котором обеспечиваются характеристики канала стандартной точности местоопределения потребителя системы ГЛОНАСС, выраженное в процентах времени на определенном временном интервале, в течение которого обеспечиваются заданные условия.
2.3 доступность (Service Availability):
2.3.1 доступность А: Готовность спутников в рабочей зоне системы на любом 24-часовом интервале, в течение которого с 95%-ной вероятностью прогнозируемая погрешность местоопределения меньше порогового значения для любой точки рабочей зоны системы, выраженная в процентах времени на определенном временном интервале, в течение которого обеспечиваются заданные условия.
2.3.1.1 доступность местоопределения по горизонтали (Horizontal Service Availability): процент времени на любом 24-часовом интервале, в течение которого с 95%-ной вероятностью погрешность местоопределения по горизонтали меньше порогового значения для любой точки рабочей зоны системы.
2.3.1.2 доступность местоопределения по вертикали (Vertical Service Availability): процент времени на любом 24-часовом интервале, в течение которого с 95%-ной вероятностью погрешность местоопределения по вертикали меньше порогового значения для любой точки рабочей зоны системы.
2.3.2 доступность Б: Готовность спутников излучать пригодные навигационные сигналы в рабочей зоне системы, обеспечивающие получение потребителем заданных точностных характеристик, выраженная в процентах времени на определенном временном интервале, в течение которого обеспечиваются заданные условия.
2.4 погрешность местоопределения (Error of Positioning): Разность измеренного и действительного положения потребителя в рабочей зоне системы (измеряется в метрах) с заданным уровнем доступности (эксплуатационной готовности) и надежности (выражается в процентах времени на определенном временном интервале, в течение которого обеспечиваются заданные условия).
2.5 погрешность передачи Всемирного координированного времени государственного эталона Российской Федерации (Time Transfer Accuracy of Russian Federation Universal Time Coordinated): Разность Всемирного координированного времени государственного эталона Российской Федерации и времени, полученного из решения задачи местоопределения потребителя в зоне действия системы с заданным уровнем доступности, надежности и точности, выраженного в наносекундах.
2.6 навигационное поле системы ГЛОНАСС (GLONASS System Navigation Field): Совокупность радионавигационных сигналов в рабочей зоне системы, позволяющая проводить измерения навигационных параметров и определение местоположения, составляющих вектора скорости и времени с требуемым уровнем доступности, надежности и точности.
2.7 работоспособный спутник (Operational Satellite): Спутник системы ГЛОНАСС, способный передавать пригодный радионавигационный сигнал с параметрами и структурой, соответствующими установленным в Интерфейсном контрольном документе системы ГЛОНАСС и имеющий подтверждение о его работоспособности в навигационном сообщении.
Примечание - В соответствии с этим определением любой спутник, параметры которого передаются в составе навигационного сообщения с соответствующим индексом, является работоспособным.
2.8 навигационное сообщение (Navigation Message): Информация об эфемеридах, времени, состоянии спутников, представленная в цифровом виде, структура которой соответствует установленной в Интерфейсном контрольном документе системы ГЛОНАСС.
2.9 местоопределение (Position Solution): Определение пространственных координат путем псевдодальномерных измерений и использования навигационных сообщений со спутников системы ГЛОНАСС.
2.10 надежность обслуживания (Service Reliability): Выполнение системой ГЛОНАСС своих функций в течение определенного периода времени при установленных условиях эксплуатации.
2.11 коэффициент готовности навигационного космического аппарата (Readiness Factor): Вероятность того, что в любой момент времени периода эксплуатации, навигационный космический аппарат будет находиться в работоспособном состоянии, обеспечивая непрерывное излучение достоверного радионавигационного сигнала канала стандартной точности.
2.12 перерыв в навигационном обеспечении каналом стандартной точности (Service Degradation): Интервал времени, в течение которого одна или более заявленных характеристик канала стандартной точности не выполняются и потребители извещены об этом заранее, измеряется в часах.
2.13 отказ в навигационном обеспечении (Service Failure): Событие, происходящее в определенный период времени, в течение которого один или более параметров канала стандартной точности навигационного космического аппарата не выполняются и потребители не оповещены об этом заранее.
2.14 псевдодальность (Pseudorange): Разность между временем приема навигационного сигнала пользователем и временем передачи его со спутника, умноженная на скорость распространения радиоволн в пространстве, измеряется в метрах.
2.15 геометрический фактор ухудшения точности по вектору положения (Position Dilution of Precision): Отношение трехмерной погрешности определения местоопределения в точке нахождения навигационной аппаратуры потребителя к погрешности измерения псевдодальности.
2.16 радионавигационный сигнал (Radionavigation Signal): Радиосигнал кода стандартной точности, излучаемый навигационным космическим аппаратом и модулированный псевдослучайной последовательностью дальномерного кода, меткой времени и цифровой информацией навигационного сообщения, соответствующего требованиям Интерфейсного контрольного документа системы ГЛОНАСС.
2.17 сигнал в пространстве (Signal in Space): Сигнал без учета погрешностей распространения в ионосфере, тропосфере, погрешности приемника, многоканальности и помех.
Погрешность за счет космического сегмента является потенциальной точностью системы ГЛОНАСС при работе в реальном масштабе времени.
3 Обозначения и сокращения
В настоящем стандарте применены следующие обозначения и сокращения:
АС - альманах системы ГЛОНАСС;
ГЛОНАСС - глобальная навигационная спутниковая система Российской Федерации;
ИКД - интерфейсный контрольный документ;
КСТ - канал стандартной точности;
НКА - навигационный космический аппарат;
ПЗ-90.02 - государственная геоцентрическая система координат "Параметры земли 1990 года";
ПКА - подсистема навигационных космических аппаратов;
ПКУ - подсистема контроля и управления;
СКП - средняя квадратическая погрешность;
UTC(SU) - национальная шкала координированного времени Российской Федерации;
GPS - глобальная навигационная спутниковая система Соединенных Штатов Америки;
PDOP - геометрический фактор ухудшения точности по вектору положения;
MCOV - число сеансов в сутках, на которых не выполнялись условия по рабочей зоне;
MDATA - число потерянных сеансов в суточном интервале измерений из-за неготовности спутника к работе с пользователем;
MAVL - число сеансов местоопределений в суточном интервале, на которых выполнялись условия по доступности;
MREL - число сеансов, не пригодных для оценки погрешности местоопределения;
SIS - сигнал в пространстве;
URE - эквивалентная погрешность дальности.
4 Технические требования
4.1 Общие требования
4.1.1 В процессе местоопределения эталонный приемник выполняет беззапросные измерения псевдодальности по всем видимым НКА системы ГЛОНАСС, а также принимает и обрабатывает навигационные сообщения, содержащиеся в составе спутниковых навигационных радиосигналах. Структуры навигационного сигнала и навигационного сообщения приведены в ИКД системы ГЛОНАСС.
Для пересчета параметров эфемерид из навигационного сообщения спутника на моменты измерений используют алгоритмы, приведенные в ИКД системы ГЛОНАСС или эквивалентные им по точности.
4.1.2 Для проведения местоопределения используют сигналы стандартной точности на частоте L1 и L2 с тактовой частотой 0,511 МГц, предназначенные для использования отечественными и зарубежными гражданскими потребителями.
4.2 Ограничения на характеристики канала стандартной точности для сигнала в пространстве
Требования к КСТ для сигнала в пространстве основаны на том, что используемый эталонный приемник обладает следующими характеристиками:
- функционирует в соответствии с требованиями ИКД системы ГЛОНАСС;
- использует угол места, больший или равный 5°;
- производит вычисление местоположения спутника и геометрического расстояния в соответствии с ПЗ-90.02, связанной с Землей, и времени по UTC (SU);
- производит решение задачи определения местоположения и времени на основе радиовещательной передачи данных со всех видимых спутников, компенсирует динамическое допплеровское смещение в измерениях по коду и фазе несущей номинального сигнала КСТ;
- исключает неработоспособные спутники ГЛОНАСС из решения задачи местоопределения по информации из навигационного сообщения, передаваемого каждым НКА;
- использует обновленные и внутренне совместимые эфемериды и параметры времени для всех спутников, которые он задействует для определения местоположения;
- теряет сопровождение в случаях, когда спутник прекращает передачу радионавигационного сигнала КСТ;
- определяет точность передачи шкалы времени применительно к стационарному пункту с известными координатами.
4.3 Ограничения на характеристики системы ГЛОНАСС
4.3.1 ПКА должна содержать не менее 24 НКА. Допускается кратковременное снижение числа НКА до 21. Орбитальная структура ПКА, номинальные параметры орбит приведены в ИКД системы ГЛОНАСС.
4.3.2 Коэффициент готовности НКА должен быть не менее 99%.
4.3.3 Пороговая погрешность по дальности любого спутника должна быть не более 18 м.
4.3.4 Интенсивность замены вышедших из строя спутников (групповые пуски по три спутника) должна быть не более шести спутников в год.
4.3.5 Срок замены вышедшего из строя спутника должен быть не более:
- 20 сут - из орбитального резерва;
- 50 сут - с Земли;
- 30 сут - средний.
4.3.6 СКП эфемерид спутников не должны превышать, соответственно:
- 7 м - вдоль орбиты;
- 7 м - по бинормали;
- 1,5 м - по радиус-вектору.
4.3.7 СКП взаимной синхронизации бортовых часов спутников в системе должна быть не более 8 нс.
4.3.8 Предельные смещения НКА в плоскости орбиты относительно номинального положения в течение срока активного существования должны быть не более ±5°.
4.3.9 СКП измерения дальности эталонным приемником для всего созвездия должна быть не более 6 м.
4.3.10 Мощность радионавигационного сигнала КСТ на частотах L1 и L2, принимаемого потребителем от НКА на выходе приемной линейно поляризованной антенны с коэффициентом усиления 3 дБ и при угле места выше 5° для любой ориентации антенны, ортогональной к направлению распространения, должна находиться в диапазоне значений от минус 161 до минус 155,2 дБВт.
4.3.11 Погрешности параметров дальности должны быть не более:
а) по дальности любого спутника - 18 м;
б) скорости изменения дальности любого спутника - 0,02 м/с;
в) ускорения изменения дальности любого спутника - 0,007 м/с;
г) СКП по дальности для всех спутников созвездия - 6 м.
4.4 Значения параметров радионавигационного поля
Значения параметров радионавигационного поля системы, приведенные для стандартного (безотказного) приемника, не должны превышать значений, приведенных в таблице 1. Значения параметров радионавигационного поля рассчитывают методом математического моделирования с использованием исходных данных и допущений, приведенных в 4.1-4.3.
Таблица 1 - Значения параметров радионавигационного поля системы
Наименование параметра | Значение | Условия и ограничения |
Рабочая зона системы, не менее | 98% | Расчеты проводят по всем видимым НКА в течение 24 ч НКА должны обеспечивать фактор точности PDOP не более 6 Угол места спутника должен быть 5° и более В соответствии с АС в ПКА должно быть не менее 21 работающего спутника |
Доступность А, не менее для среднего положения: | 12 м по горизонтали с порогом 95% 25 м по вертикали с порогом 95% Результат получен по типичному интервалу 24 ч, усредненному по обслуживаемому пространству - для спутников, излучающих КСТ и имеющих признак "работоспособен" | |
- по горизонтали | 99% | |
- по высоте | 99% | |
для наихудшего положения, не менее | 12 м по горизонтали с порогом 95% 25 м по вертикали с порогом 95% Результат получен по типичному интервалу 24 ч, осредненному по обслуживаемому пространству - для спутников, излучающих КСТ и имеющих признак "работоспособен" | |
- по горизонтали | 90% | |
- по высоте | 90% | |
Доступность Б, не менее | 99,7% | Расчеты проводят с учетом значений рабочей зоны, периодов замены НКА, излучающих КСТ и имеющих признак "работоспособен" Определяют на интервале 60 суток по усредненным результатам на интервале 24 ч и осредненному по рабочей зоне |
Надежность обслуживания, не менее: | Расчеты проводят, если рабочая зона и доступность соответствуют установленным требованиям Пороговое значение погрешности дальности не более 18 м Определяют среднее значение измерений за один год | |
- средняя по поверхности Земли | 99,37% | |
- среднее значение для отдельного пункта | 99,14% | |
Погрешность местоопределения, не более: | Расчеты проводят, если рабочая зона и доступность и надежность соответствуют установленным требованиям Значения определяют на интервале 24 ч для любой точки рабочей зоны | |
для среднего положения в 95% времени: | ||
- в горизонтальной плоскости | 5 м | |
- по вертикали | 9 м | |
для наихудшего положения 95% времени, не более: | Расчеты проводят, если рабочая зона и доступность и надежность соответствуют установленным требованиям Значения определяют на интервале 24 ч для любой точки рабочей зоны | |
- в горизонтальной плоскости | 12 м | |
- по вертикали | 25 м | |
Погрешность передачи времени UTC(SU) за 95% времени, не более | 700 нс | Расчеты проводят, если рабочая зона и доступность и надежность соответствуют установленным требованиям Значения определяют на интервале 24 ч для любой точки рабочей зоны При расчетах учитывают погрешность привязки времени НКА и его передачу пользователю |
5 Методы испытаний
5.1 Общие положения
Основные параметры радионавигационного поля системы ГЛОНАСС определяют методом моделирования функционирования системы ГЛОНАСС в процессе проведения статистических испытаний.
Примечание - Методы определения параметров радионавигационного поля системы ГЛОНАСС гармонизированы с аналогичными методами, используемыми в системе GPS после снятия селективного доступа и изменения методов определения параметров радионавигационного поля, поскольку обе системы используются как международные.
5.2 Метод измерения рабочей зоны
Зона действия КСТ охватывает пространство от поверхности Земли до высоты 2000 км.
Величина рабочей зоны определяется в следующей последовательности при выполнении условий и ограничений, указанных в разделе 4 для любой точки на земном шаре на интервале измерения 24 ч по следующему алгоритму:
1 По альманаху текущего созвездия спутников рассчитывают положения спутников (включая неисправные спутники) каждую секунду на интервале 24 ч.
2 Рассчитывают углы места для каждого спутника без учета рельефа местности.
3 Если четыре или более спутников находятся в зоне видимости (угол места выше 5°) в момент , для определения местоположения выбирают созвездие спутников по наименьшему PDOP.
Если обеспечивают PDOP, равный шести или менее, мгновенный коэффициент рабочей зоны принимают равным единице.
Если имеется менее четырех спутников в зоне радиовидимости или PDOP больше шести для всех видимых спутников, то приравнивают к нулю.
4 Рассчитывают значение рабочей зоны в %, основанную на мгновенных значениях рабочей зоны
по формуле
 , (1)
, (1)
где число сеансов равно 86400.
5.3 Метод определения доступности навигационного обслуживания
Доступность обслуживания определяют в следующей последовательности при выполнении условий и ограничений, указанных в разделе 4 и выполнении условий по рабочей зоне для интервала 24 ч любой точки на поверхности Земли.
Доступность (эксплуатационная готовность) обслуживания представляет собой процент времени на любом 24-часовом интервале, на котором предсказывается, что 95%-ная погрешность определения местоположения (вследствие ошибок в космическом сегменте и сегменте управления) меньше порогового значения для любой точки, находящейся в зоне действия. Она основывается на 95%-ном пороговом значении погрешности 12 м в горизонтальной плоскости и 25 м в вертикальной плоскости, использовании эталонного приемника; и эксплуатации в рабочей зоне обслуживания в течение любого 24-часового интервала. Эксплуатационная готовность обслуживания предполагает наихудшее сочетание двух неработающих спутников.
5.3.1 Метод определения Б доступности
1 Используют приемник, расположенный в условиях, позволяющих наблюдать все видимые спутники, каждую секунду 24-часового суточного периода, т.е. равно 86400.
2 Проверяют наличие рабочей зоны; если условия рабочей зоны в какой-либо момент времени не выполняются (число спутников больше трех и PDOP равно шести или меньше), то доступность обслуживания для этого момента не оценивается.
MCOV подсчитывают по формуле
![]() . (2)
. (2)
3 В каждый секундный отсчет анализируют передаваемую спутниками оперативную информацию для того, чтобы проверить, являются ли все выбранные спутники доступными. Если доступны, то признаку доступности обслуживания () присваивают значение 1, если нет, то недоступные спутники исключают и повторно проверяют условия PDOP меньше или равно шести и число спутников больше трех. Если комбинация спутников обеспечивает PDOP, больший или равный шести, или нет четверки, то
присваивают значение 0.
4 Подсчитывают число сеансов местоопределений (![]() ), которые учитывают для оценки доступности обслуживания
), которые учитывают для оценки доступности обслуживания
![]() . (3)
. (3)
5 Рассчитывают суточную доступность обслуживания (![]() ) по формуле
) по формуле
 . (4)
. (4)
6 Рассчитывают среднюю суточную доступность () на 60-суточном интервале последовательных измерений по формуле
 . (5)
. (5)
5.3.2 Метод определения доступности А, указанной в 2.4
1 Используют приемник, расположенный в условиях, позволяющих наблюдать все видимые спутники, каждую секунду 24-часового суточного периода, т.е. равно 86400.
2 Проверяют наличие рабочей зоны; если условия рабочей зоны в какой-либо момент времени не выполняются (число спутников больше трех и PDOP равно шести или меньше), то доступность обслуживания для этого момента не оценивается.
MCOV подсчитывают по формуле (2).
3 В каждый секундный отсчет анализируют передаваемую спутниками оперативную информацию для того, чтобы проверить, являются ли доступными все выбранные спутники. При этом погрешность местоопределения рассчитывают по формулам (12-23) с условием, что ошибки местоопределения лежат в пределах пороговых значений (12 м в горизонтальной и 25 м в вертикальной плоскости), и присваивают значение 1, если нет, то
присваивают значение 0. Если комбинация спутников обеспечивает PDOP, больший или равный шести, или нет четверки, то
присваивают значение 0.
4 Подсчитывают число сеансов местоопределений (![]() ), которые учитывают для оценки доступности обслуживания
), которые учитывают для оценки доступности обслуживания
![]() . (6)
. (6)
5 Рассчитывают ![]() по формуле
по формуле
 . (7)
. (7)
5.4 Метод определения надежности навигационного обслуживания
Надежность обслуживания определяется при выполнении условий и ограничений, указанных в разделе 4, и требований 5.2 и 5.3.
Надежность представляет собой процент времени в течение оговоренного временного интервала, когда поддерживается текущее значение параметров дальности для сигнала в пространстве в пределах погрешности определения дальности для любой точки, расположенной в зоне обслуживания, применительно ко всем спутникам, находящимся в работоспособном состоянии. Требования по надежности на усреднении ежедневных значений для зоны обслуживания, полученных на интервале измерения в один год.
Отказ основного обслуживания определяется как состояние в течение интервала времени, в ходе которого погрешность дальномерного сигнала, находящегося в исправном состоянии спутника (исключая погрешности, обусловленные состоянием атмосферы и приемника) превышает предельное значение ошибки по дальности. Предельное значение погрешности по дальности составляет 18 м.
Оценку надежности обслуживания производят в следующей последовательности:
1 Используют приемник, расположенный в условиях, позволяющих отслеживать все видимые спутники каждую секунду суточного периода.
2 Проверяют доступность; если условия доступности в какой-либо момент времени не выполняются, то надежность в этом сеансе не оценивают. MАVL подсчитывают по формуле
 . (8)
. (8)
3 Проводят мгновенное измерение дальности, в соответствии с 5.6.
4 Определяют сеансы, где мгновенное измерение дальности превышает 18 м. Если превышает, то признак надежности равен 1, если иначе, то
равен 0.
5 Подсчитывают число местоопределений, которые учитывают для оценки надежности обслуживания .
![]() . (9)
. (9)
6 Рассчитывают надежность ![]() за 24 ч по формуле
за 24 ч по формуле
 . (10)
. (10)
7 Рассчитывают среднегодовую надежность () на основе 365 суточных оценок надежности по формуле
 . (11)
. (11)
5.5 Метод определения погрешности местоопределения
Погрешность местоопределения измеряют эталонным приемником на 24-часовом интервале измерения для любой точки рабочей зоны. Погрешности определения местоположения и времени приведены только для КСТ и SIS. В них не учитываются такие источники погрешностей, как ионосфера, тропосфера, помехи, шум приемника или многолучевое распространение.
Погрешности местоопределения определяют на основе исключаемых из штатного состава созвездия двух наихудших спутников и среднеквадратической погрешности измерения дальности пользователя для сигнала в пространстве в 6 м.
Погрешность местоопределения в системе ГЛОНАСС определяют по приведенному ниже методу при выполнении условий и ограничений, указанных в разделе 4, выполнении требований 5.2 и 5.3 и надежности обслуживания на 24-часовом интервале для любой точки поверхности Земли.
Для оценки погрешности определения местоположения накапливают измерения каждую секунду на интервале 24 ч и проверяют выполнение условий и ограничений надежности на этих секундных интервалах. Если условия и ограничения надежности на этих секундных интервалах не выполняются, то навигационное обслуживание в данный момент не признается надежным и измерение, проведенное в этот момент, не учитывают при оценке дальности. Число сеансов (секундных измерений), не пригодных для оценки погрешности местоположения, обозначают параметром MREL.
Далее рассчитывают общее число сеансов (), действительных для оценки погрешности определения местоположения.
![]() ,
,
где
 . (12)
. (12)
Определение погрешности в плане рассчитывают по следующему алгоритму:
1 Расчет производят каждую секунду на суточном интервале.
2 Рассчитывают широтную и долготную составляющие погрешностей (в метрах) на каждый момент времени ().
Погрешность по долготе рассчитывают по формуле
![]() . (13)
. (13)
Погрешность по широте рассчитывают по формуле
![]() . (14)
. (14)
Или по эквивалентным формулам
![]() ; (15)
; (15)
![]() , (16)
, (16)
где ,
...
- коэффициенты решающей матрицы (
,
- номер коэффициента);
- разность cпрогнозированной и измеренной псевдодальностей;
![]() - разность измеренной и известной долготы на момент времени
- разность измеренной и известной долготы на момент времени ;
![]() - разность измеренной и известной широты на момент времени
- разность измеренной и известной широты на момент времени .
3 Далее рассчитывают мгновенную горизонтальную погрешность
![]() . (17)
. (17)
4 Рассчитывают распределение оценки погрешностей и определяют погрешность, соответствующую 95% и 99,99% испытаний
![]() при
при ![]() , (18)
, (18)
![]() при
при ![]() . (19)
. (19)
Определение погрешности местоопределения по вертикали определяют по следующему алгоритму:
1 Расчет производят каждую секунду на суточном интервале.
2 Рассчитывают (в метрах) вертикальную составляющую погрешности на каждый момент времени .
Погрешность по долготе:
![]() (20)
(20)
или
![]() , (21)
, (21)
где - коэффициенты решающей матрицы;
- разность спрогнозированной и измеренной псевдодальностей;
![]() - разность измеренной и известной вертикали на момент времени
- разность измеренной и известной вертикали на момент времени .
3 Рассчитывают распределение оценки погрешностей и определяют погрешность, соответствующую 95% и 99,99% испытаний по формулам
![]() значение при
значение при ![]() , (22)
, (22)
![]() значение при
значение при ![]() . (23)
. (23)
5.6 Метод определения погрешности параметра дальности
Погрешность определения параметров дальности определяется при условии индикации исправности измеряемого спутника и передачи сигнала КСТ и не учитывает отказы спутников, происходящие вне нормальных условий эксплуатации.
Пределы точности определения параметров дальности могут быть превышены в ходе отказов спутников или отклонений от нормы при закладке данных в спутник.
Превышение предела погрешности измерения дальности представляет собой отказ основного обслуживания.
Предельное значение погрешности измерения дальности является максимальным для любого спутника, измеряемого в течение любого 10-секундного интервала времени для любой точки, находящейся в зоне действия.
Предельное значение погрешностей ускорения изменения дальности является максимальным для любого спутника, измеряемого в течение любого 3-секундного интервала для любой точки, находящейся в зоне обслуживания.
Точность, определяемая среднеквадратичным значением погрешности по дальности, представляет собой среднее значение всех среднеквадратичных погрешностей по дальности всех спутников на 24-часовом интервале времени для любой точки, находящейся в зоне действия.
В нормальных условиях техническое обслуживание всех спутников проводится на основе одних и тех же стандартов, поэтому для целей моделирования доступности (эксплуатационной готовности) целесообразно допустить, что всем спутникам свойственна RMS SIS URE в 6 м.
Стандарты ограничиваются погрешностями определения параметров дальности, источниками которых являются ПКА и ПКУ.
Погрешность определения дальности в системе ГЛОНАСС определяют по приведенному ниже методу при выполнении условий и ограничений, указанных в разделе 4, и требований 5.2 и 5.3.
Для измерения дальности (псевдодальности) берут разность между временем приема дальномерного сигнала (по шкале времени приемника) и временем, переданным в навигационном сообщении (по бортовой шкале времени НКА), умноженную на скорость света.
Измерения проводят каждую секунду.
5.7 Метод определения погрешности передачи времени UTC(SU)
Погрешность передачи времени по шкале UTC(SU) в системе ГЛОНАСС определяют по известным соотношениям СКП в точке с известными координатами эталонного приемника при выполнении условий и ограничений в таблице 1 для работоспособных спутников и при наличии точных координат точки определения, и наличии шкалы Государственного эталона UTC(SU). Погрешность передачи времени UTC(SU) в системе ГЛОНАСС определяют на интервале 24 ч для любой точки поверхности Земли.
Погрешность передачи времени UTC(SU) в системе ГЛОНАСС измеряют эталонным приемником при 24-часовом интервале измерения для любой точки, находящейся в зоне действия. Погрешность определения времени предназначена только для КСТ и SIS, и в ней не учитываются такие источники погрешностей, как ионосфера, тропосфера, помехи, шум приемника или многолучевое распространение.
5.8 Объем статистики для определения характеристик навигационного поля
5.8.1 Для определения параметров по рабочей зоне, доступности, надежности и погрешности местоопределения поверхность Земли аппроксимируют равномерной аналитической сеткой с 98500 потребителями, расположенными в узлах сетки.
5.8.2 Интервал набора статистики по дискретности измерений и интервалу в каждом узле аналитической сетки должен быть не менее значения, указанного в 5.2 - для определения рабочей зоны, 5.3 - для определения доступности, 5.4 - для определения надежности, 5.5 - для определения погрешности местоопределения.
Приложение А
(справочное)
А.1 Назначение и состав глобальной навигационной спутниковой системы ГЛОНАСС
Глобальная навигационная спутниковая система ГЛОНАСС предназначена для определения местоположения, скорости движения и точного времени сухопутных, морских, воздушных и космических потребителей.
Требования точности, доступности, надежности и времени навигационных определений вышеперечисленных потребителей обеспечиваются двумя подсистемами: ПКА и ПКУ.
А.2 Подсистема космических аппаратов
А.2.1 ПКА системы ГЛОНАСС состоит в обычном режиме из 24 модернизированных спутников "ГЛОНАСС-М".
Примечание - Модернизированные спутники "ГЛОНАСС-М" обеспечивают для всех типов потребителей более высокий уровень точности, дополнительные функциональные возможности и передают код стандартной точности в новом частотном диапазоне (1242,9375-1248,625)±0,511 МГц на частоте L2 дополнительно к коду стандартной точности (1592,0625-1605,375)±0,511 МГц на частоте L1.
А.2.2 Каждый спутник излучает в составе радионавигационного сигнала навигационное сообщение, сформированное спутником на основе данных, закладываемых ПКУ один-два раза в сутки. Спутники "ГЛОНАСС-М" передают радионавигационные сигналы и в частотном диапазоне L1 ~ 1,6 ГГц и L2 ~ 1,25 ГГц, подобный по структуре сигналу L1.
Использование двух любых сигналов позволяет потребителю исключать ионосферную составляющую погрешностей измерения псевдодальности аппаратурным способом и проводить измерения по фазе несущей радионавигационного сигнала, а при использовании трех радионавигационных сигналов проводить измерения по фазе несущей радионавигационного сигнала в динамическом режиме.
В системе ГЛОНАСС используют частотное разделение радионавигационных сигналов во всех диапазонах частот L1 и L2. Каждый спутник излучает радионавигационные сигналы на собственных частотах. При этом спутники, находящиеся в противоположных точках орбитальной структуры (с точностью ±5° каждый), как правило, излучают радионавигационные сигналы на одинаковых частотах.
В процессе эксплуатации ПКУ может изменять собственные значения частот спутника, информируя потребителя об этом через навигационное сообщение (номер литерных частот спутника).
Периодические закладки данных на спутники не приводят к перерывам в излучении дальномерных радионавигационных сигналов и передаче навигационного сообщения.
А.2.3 На спутниках "ГЛОНАСС-М" начало передачи новых данных в навигационном сообщении после закладки будет совпадать с началом нового интервала .
Примечание - Длительность интервала устанавливается в зависимости от значения признака П1, передаваемого в навигационном сообщении.
А.2.4 ПКА из 24 спутников, распределенных равномерно в пространстве, формирует непрерывное глобальное навигационное поле на поверхности Земли и в околоземном пространстве до высоты 2000 км, при этом каждый спутник излучает радионавигационные сигналы в направлении на Землю в телесном угле ±19°.
Схема процесса генерации сигналов на спутнике приведена на рисунке А.1.
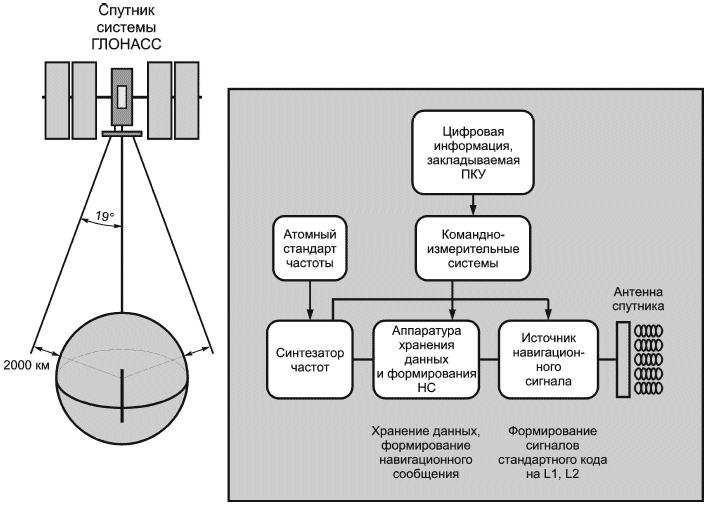
Рисунок А.1 - Процесс генерации сигналов на спутнике
А.3 Подсистема контроля и управления
А.3.1 ПКУ состоит из центра управления, центрального синхронизатора системы, командно-измерительных систем, системы управления, измерения и контроля, аппаратуры контроля навигационного поля и радиоконтроля орбиты, квантово-оптической (лазерной) измерительной системы.
Перечисленные средства выполняют полный объем работ по управлению системой ГЛОНАСС.
Схема процесса управления приведена на рисунке А.2.
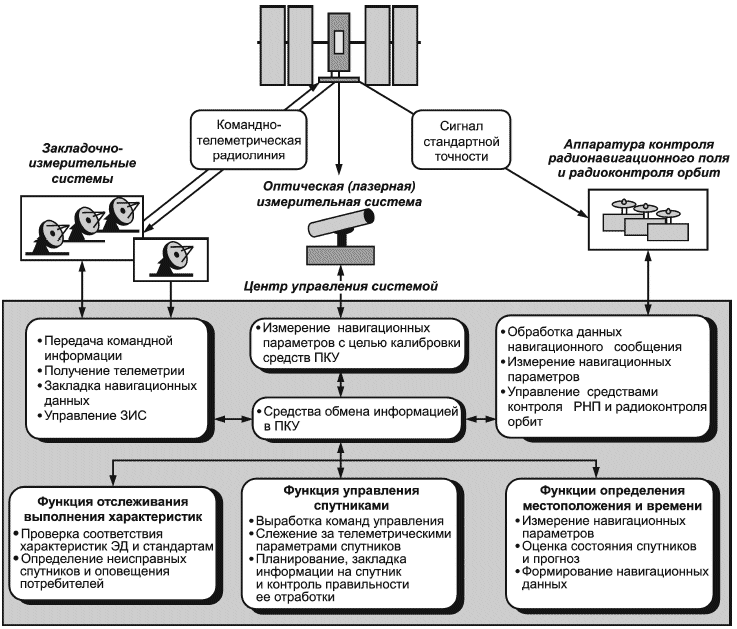
Рисунок А.2 - Процесс управления системой спутников
Основным элементом в процессе управления орбитальной группировкой является центр управления системой. Центр управления системой на протяжении эксплуатации системы ведет непрерывное управление орбитальной группировкой, выполняя следующие основные операции:
- обеспечение непрерывного функционирования спутников по целевому назначению;
- управление спутниками с обеспечением характеристик радионавигационных сигналов в соответствии с ИКД системы ГЛОНАСС и настоящим стандартом;
- формирование навигационных данных и их закладку на спутник в соответствии с эксплуатационной документацией и заданными параметрами навигационного поля;
- оперативное выявление неисправностей и их локализацию в орбитальной группировке и в ПКУ.
А.3.2 В ПКУ используют командно-измерительные (закладочно-измерительные) системы, обеспечивающие телеметрический контроль и управление, т.е. интерфейс между каждым спутником орбитальной группировки и центром управления системой.
Командно-измерительные системы выполняют также измерения дальности и приращения дальности (запросной дальности до спутника и обратно до измерительной системы), которые используют для расчета параметров орбит и синхронизации радионавигационных сигналов спутников. Одновременно с этим ПКУ использует сеть беззапросных измерительных станций, по результатам измерений с которых производят расчет параметров орбит и синхронизацию навигационных радиосигналов спутников по беззапросной схеме измерений.
В рабочей зоне ПКУ также осуществляет непрерывный контроль параметров радионавигационного поля системы.
А.3.3 Все технические средства ПКУ расположены на территории Российской Федерации. Общая зона радиовидимости средств ПКУ для определения параметров орбиты спутников системы составляет 13 ч в сутки. Следовательно, до 5,5 ч на каждом витке спутник ГЛОНАСС находится вне зоны радиовидимости средств ПКУ.
Электронный текст документа
и сверен по:
, 2010
{kind=link}