ГОСТ Р МЭК 61800-1-2012
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
СИСТЕМЫ СИЛОВЫХ ЭЛЕКТРОПРИВОДОВ С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ
Часть 1
Общие требования. Номинальные технические характеристики низковольтных систем электроприводов постоянного тока с регулируемой скоростью
Adjustable speed electrical power drive systems. Part 1. General requirements. Rating specifications for low voltage adjustable speed d.c. power drive systems
ОКС 29.160.30; 29.200
Дата введения 2013-06-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным бюджетным образовательным учреждением высшего профессионального образования "Национальный исследовательский университет "МЭИ" (ФГБОУВПО "НИУ "МЭИ") и Федеральным государственным унитарным предприятием "Всероссийский научно-исследовательский институт стандартизации и сертификации в машиностроении" (ВНИИНМАШ) на основе собственного аутентичного перевода на русский язык международного стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 333 "Вращающиеся электрические машины"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 20 сентября 2012 г. N 375-ст
4 Настоящий стандарт идентичен международному стандарту МЭК 61800-1:1997* "Системы силовых электроприводов с регулируемой скоростью. Часть 1. Общие требования. Номинальные технические характеристики низковольтных систем электроприводов постоянного тока с регулируемой скоростью" (IEC 61800-1:1997 "Adjustable speed electrical power drive systems - Part 1: General requirements - Rating specifications for low voltage adjustable speed d.c. power drive systems").
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты Российской Федерации и действующие в этом качестве межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в ГОСТ Р 1.0-2012 (раздел 8). Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте национального органа Российской Федерации по стандартизации в сети Интернет (gost.ru)
1 Общие сведения
1.1 Область применения
Настоящий стандарт распространяется на регулируемые электроприводы постоянного тока общего назначения, включающие силовой преобразователь, устройства управления и один или несколько двигателей.
Настоящий стандарт распространяется на электроприводы, питающиеся от линейного напряжения переменного тока до 1000 В частотой 50 или 60 Гц.
Настоящий стандарт не распространяется на тяговые электроприводы электрического транспорта.
Настоящий стандарт распространяется на машины постоянного тока и трехфазные машины переменного тока с высотой оси вращения не менее 56 мм, номинальной мощностью до 50 МВт с частотой вращения от 120 до 15000 мин включительно.
Настоящий стандарт не распространяется на машины, установленные на месте эксплуатации, трехфазные коллекторные машины, однофазные машины, трехфазные машины с однофазным питанием, вертикальные гидрогенераторы, турбогенераторы мощностью свыше 20 МВт, машины на магнитном подвесе и машины с последовательными обмотками возбуждения.
Примечание 1 - Для машин, установленных на месте эксплуатации, допускается использовать соответствующие разделы стандартов ИСО 10816-1 и ИСО 7919.
1.2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие международные документы*:
_______________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
МЭК 60034-1:2004 Машины электрические вращающиеся. Часть 1. Номинальные значения параметров и эксплуатационные характеристики (IEC 60034-1:2004, Rotating electrical machines - Part 1: Rating and performance)
МЭК 60034-9:1997* Машины электрические вращающиеся. Часть 9. Предельные уровни шума (IEC 60034-9: 1997, Rotating electrical machines - Part 9: Noise limits)
_______________
* МЭК 60034-1:2004, МЭК 60034-9:1997, МЭК 60038:1983 заменены на МЭК 60034-1:2010, МЭК 60034-9:2007, МЭК 60038:2009 соответственно.
Для однозначного соблюдения требований настоящего стандарта, выраженных в датированных ссылках, рекомендуется использовать только данный ссылочный стандарт.
МЭК 60038:1983* Напряжения стандартные по МЭК (IEC 60038:1983, IEC standard voltages)
_______________
* МЭК 60034-1:2004, МЭК 60034-9:1997, МЭК 60038:1983 заменены на МЭК 60034-1:2010, МЭК 60034-9:2007, МЭК 60038:2009 соответственно.
Для однозначного соблюдения требований настоящего стандарта, выраженных в датированных ссылках, рекомендуется использовать только данный ссылочный стандарт.
МЭК 60050-111:1996 Международный электротехнический словарь. Глава 111: Физика и химия (IEC 60050-111:1996 International Electrotechnical Vocabulary - Part 111: Physics and chemistry)
МЭК 60050-151:2001 Международный электротехнический словарь. Глава 151: Электрические и магнитные устройства (IEC 60050-151:2001, International Electrotechnical Vocabulary. Part 151. Electrical and magnetic devices)
МЭК 60050-441:1984 Международный электротехнический словарь. Глава 441: Коммутационная аппаратура, аппаратура управления и предохранители (IEC 60050-441:1984, International Electrotechnical Vocabulary. Part 441: Switchgear, controlgear and fuses)
МЭК 60050-551:1998 Международный электротехнический словарь. Глава 551. Силовая электроника (IEC 60050-551:1998, International Electrotechnical Vocabulary. Part 551: Power electronics)
МЭК 60050-601:1985 Международный электротехнический словарь. Глава 601: Производство, передача и распределение электроэнергии. Общие положения (IEC 60050-601: 1985, International Electrotechnical Vocabulary. Part 601: Generation, transmission and distribution of electricity - General)
МЭК 60076 Трансформаторы силовые (IEC 60076, Power transformers)
МЭК 60146-1-1:1991* Преобразователи полупроводниковые. Часть 1-1. Технические условия на основные требования (IEC 60146-1-1:1991, Semiconductor converters - General requirements and line commutated converters - Part 1-1: Specification of basic requirements)
_______________
* МЭК 60146-1-1:1991, МЭК 60146-1-2:1991, МЭК 60204-1:1991 заменены на МЭК 60146-1-1:2009, МЭК 60146-1-2:2011, МЭК 60204-1:2005 соответственно.
Для однозначного соблюдения требований настоящего стандарта, выраженных в датированных ссылках, рекомендуется использовать только данный ссылочный стандарт.
МЭК 60146-1-2:1991* Преобразователи полупроводниковые. Часть 1-2. Руководство по применению (IEC 60146-1-2:1991, Semiconductor converters - General requirements and line commutated converters - Part 1-2: Application guide)
_______________
* МЭК 60146-1-1:1991, МЭК 60146-1-2:1991, МЭК 60204-1:1991 заменены на МЭК 60146-1-1:2009, МЭК 60146-1-2:2011, МЭК 60204-1:2005 соответственно.
Для однозначного соблюдения требований настоящего стандарта, выраженных в датированных ссылках, рекомендуется использовать только данный ссылочный стандарт.
МЭК 60146-1-3:1991 Преобразователи полупроводниковые. Часть 1-3. Трансформаторы и катушки индуктивности (IEC 60146-1-3:1991 Semiconductor converters - General requirements and line commutated converters - Part 1-3: Transformers and reactors)
МЭК 60204-1:1991* Электрооборудование промышленных машин. Часть 1. Общие требования (IEC 60204-1: 1991, Electrical equipment of industrial machines. Part 1: General requirements)
_______________
* МЭК 60146-1-1:1991, МЭК 60146-1-2:1991, МЭК 60204-1:1991 заменены на МЭК 60146-1-1:2009, МЭК 60146-1-2:2011, МЭК 60204-1:2005 соответственно.
Для однозначного соблюдения требований настоящего стандарта, выраженных в датированных ссылках, рекомендуется использовать только данный ссылочный стандарт.
МЭК 60529:1989 Степени защиты, обеспечиваемые корпусами (Код IP) (IEC 60529:1989, Degrees of protection provided by enclosures (IP code))
МЭК 60664-1:1992* Координация изоляции для оборудования в низковольтных системах. Часть 1: Принципы, требования и испытания (IEC 60664-1:1992, Insulation coordination for equipment within low-voltage systems - Part 1: Principles, requirements and tests)
_______________
* МЭК 60146-1-1:1991, МЭК 60146-1-2:1991, МЭК 60204-1:1991 заменены на МЭК 60146-1-1:2009, МЭК 60146-1-2:2011, МЭК 60204-1:2005 соответственно.
Для однозначного соблюдения требований настоящего стандарта, выраженных в датированных ссылках, рекомендуется использовать только данный ссылочный стандарт.
МЭК 60721-3-1:1987* Классификация условий окружающей среды. Часть 3. Классификация групп параметров окружающей среды и степень воздействия. Хранение (IEC 60721-3-1:1987, Classification of environmental conditions - Part 3: Classification of groups of environmental parameters and their severities - Section 1: Storage)
_______________
* МЭК 60146-1-1:1991, МЭК 60146-1-2:1991, МЭК 60204-1:1991 заменены на МЭК 60146-1-1:2009, МЭК 60146-1-2:2011, МЭК 60204-1:2005 соответственно.
Для однозначного соблюдения требований настоящего стандарта, выраженных в датированных ссылках, рекомендуется использовать только данный ссылочный стандарт.
МЭК 60721-3-2:1997 Классификация внешних воздействующих факторов. Часть 3. Классификация групп параметров окружающей среды и их степеней жесткости. Раздел 2. Транспортирование (IEC 60721-3-2:1997, Classification of environmental conditions - Part 3: Classification of groups of environmental parameters and their severities - Section 2: Transportation)
МЭК 60721-3-3:1994 Классификация внешних воздействующих факторов. Часть 3. Классификация групп параметров окружающей среды и их степеней жесткости. Раздел 3. Эксплуатация в стационарных условиях в местах, защищенных от непогоды (IEC 60721-3-3:1994, Classification of environmental conditions - Part 3: Classification of groups of environmental parameters and their severities; section 3: Stationary use at weather protectedlocations)
МЭК 61000-2-4:1994* Электромагнитная совместимость. Часть 2: Условия окружающей среды. Раздел 4: Уровни совместимости для низкочастотных проводимых помех в промышленных установках (IEC 61000-2-4:1994, Electromagnetic compatibility (EMC); part 2: environment; section 4: compatibility levels in industrial plants for low-frequency conducted disturbances)
_______________
* МЭК 60146-1-1:1991, МЭК 60146-1-2:1991, МЭК 60204-1:1991 заменены на МЭК 60146-1-1:2009, МЭК 60146-1-2:2011, МЭК 60204-1:2005 соответственно.
Для однозначного соблюдения требований настоящего стандарта, выраженных в датированных ссылках, рекомендуется использовать только данный ссылочный стандарт.
МЭК 61000-4-7:1991 Электромагнитная совместимость. Часть 4. Методики испытаний и измерений. Раздел 7. Общее руководство по измерениям и приборам для измерения гармоник и промежуточных гармоник для систем энергоснабжения и связанного с ним оборудования (IEC 61000-4-7:1991, Electromagnetic compatibility (EMC) - Part 4: testing and measuring techniques - Section 7: general guide on harmonics and interharmonics measurements and instrumentation, for power suplly systems and equipment connected thereto)
МЭК 61136-1:1992* Системы силовых электрических приводов с регулируемой скоростью. Часть 6. Руководство по определению типов режимов нагрузки и соответствующих номинальных токов (IEC/TR 61800-6:2003, Adjustable speed electrical power drive systems - Part 6: Guide for determination of types of load duty and corresponding current ratings)
_______________
* МЭК 61136-1:1992, МЭК 61800-3:1996 заменены на МЭК/ТО 61800-6:2003, МЭК 61800-3:2012 соответственно.
Для однозначного соблюдения требований настоящего стандарта, выраженных в датированных ссылках, рекомендуется использовать только данный ссылочный стандарт.
МЭК 61800-3:1996* Системы электродвигательных приводов с регулируемой скоростью. Часть 3. Стандартные требования к электромагнитной совместимости продукции и специальные методы испытаний (IEC 61800-3:1996, Adjustable speed electrical power drive systems - Part 3: EMC requirements and specific test methods)
_______________
* МЭК 61136-1:1992, МЭК 61800-3:1996 заменены на МЭК/ТО 61800-6:2003, МЭК 61800-3:2012 соответственно.
Для однозначного соблюдения требований настоящего стандарта, выраженных в датированных ссылках, рекомендуется использовать только данный ссылочный стандарт.
МЭК Руководство 106:1989, Руководство по определению условий окружающей среды для определения эксплуатационных характеристик оборудования (IEC Guide 106:1989, Guide for specifying environmental conditions for equipment performance rating)
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодно издаваемому информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по соответствующим выпускам ежемесячно издаваемого информационного указателя за текущий год. Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться замененным (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
1.3 Обозначения
В таблице 1 приведены обозначения, используемые в настоящем стандарте.
Таблица 1 - Обозначения
Наименование параметра | Обозначение | Единица измерения | Определение |
Номинальное напряжение сети | В | 2.4.1 | |
Номинальная частота | Гц | 2.4.2 | |
Линейное номинальное напряжение на входе силового преобразователя | В | 2.4.3 | |
Линейный номинальный переменный ток базового модуля преобразователя/комплектного преобразователя | А | 2.4.4 | |
Номинальный входной ток преобразователя | А | 2.4.5 | |
Гармонический состав напряжения или тока источника питания | В или А | 2.4.6 | |
Полный коэффициент гармонических искажений | % | 2.4.8 | |
Косинус угла сдвига фаз напряжения и тока на входе преобразователя |
| 2.4.9 | |
Косинус угла сдвига фаз первых гармоник фазного напряжения и тока |
| 2.4.10 | |
Входной суммарный коэффициент полной мощности | 2.4.11 | ||
Максимальный переменный ток системы, симметричный ток короткого замыкания | А | 2.4.12 | |
Относительный ток короткого замыкания | 2.4.12 | ||
Выходной ток | A | 2.5.1 | |
Номинальный выходной ток | A | 2.5.2 | |
Выходной ток перегрузки (перегрузочная способность) | A | 2.5.3 | |
Номинальное выходное напряжение | В | 2.5.5 | |
Пульсирующее напряжение | В | 2.5.6 | |
Пульсирующий ток | A | 2.5.6 | |
КПД электропривода (ЭПТ) | % | 2.5.8 | |
КПД КП | % | 2.5.8 | |
Номинальная частота вращения | об/мин | 2.7.3 | |
Максимальная рабочая частота вращения | об/мин | ||
Минимальная рабочая частота вращения | об/мин | ||
Максимальная безопасная частота вращения двигателя |
| об/мин | 2.7.4 |
Крутящий момент | Н·м | ||
Момент инерции | кг·м |
В таблице 2 приведены обозначения параметров двигателя.
Таблица 2 - Обозначения параметров двигателя
Наименование параметра | Обозначение | Единица измерения |
Номинальная мощность на валу | кВт | |
Номинальное напряжение якоря | В | |
Номинальный ток якоря | А | |
Текущее значение пиковой нагрузки | А | |
Допустимая скорость изменения тока якоря |
| А/с |
Допустимые пульсации тока якоря | А | |
Индуктивность якоря | Гн | |
Сопротивление якоря | Ом | |
Номинальное напряжение возбуждения | В | |
Номинальный ток возбуждения | А | |
Ток возбуждения при максимальной скорости | А | |
Индуктивность обмотки возбуждения | Гн | |
Сопротивление обмотки возбуждения | Ом | |
Номинальная частота вращения | об/мин | |
Максимальная частота вращения | об/мин | |
Максимальная безопасная частота вращения |
| об/мин |
Вращающий момент | Н·м | |
Момент инерции | кг·м |
2 Термины и определения
В настоящем стандарте применены термины, соответствующие стандартам, приведенным в 1.2.
2.1 Система электропривода
2.1.1 Электропривод постоянного тока (ЭПТ)
Система электропривода, представленная на рисунке 1, состоит из силового оборудования (преобразователя, двигателя постоянного тока и другого оборудования, такого как система питания, возбудитель и т.п.) и системы управления включением и отключением, скоростью, током, системой коммутации вентилей, регулирования возбуждения, защитой, проверкой состояния, тестированием, интерфейсами и т.д.
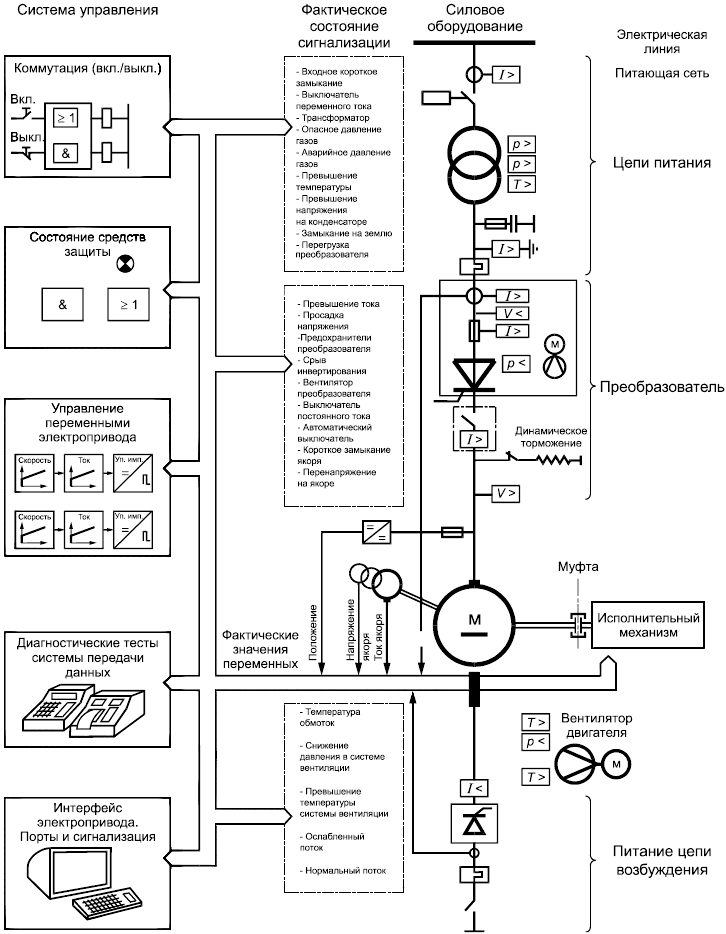
Рисунок 1 - Функциональная схема электропривода постоянного тока
Примечание - На рисунке 1 представлены основные функциональные элементы электропривода постоянного тока, который в разных применениях может включать дополнительные элементы. Эти опции могут обеспечивать самые разнообразные возможности широкой гаммы ЭПТ. Преобразователь на данном рисунке не предполагает какого-либо конкретного решения или типа силовых ключей, которые могут быть различными в каждом конкретном применении. См. приложение D.
2.1.2 Электропривод постоянного тока - аппаратная структура
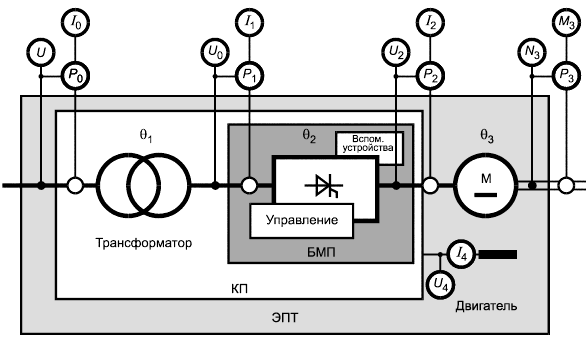
ЭПТ состоит из комплектного преобразователя (КП) и двигателя или двигателя с механически связанными с его валом датчиками момента (исполнительный механизм не входит в ЭПТ). На рисунке 2 представлены аппаратные составляющие ЭПТ.
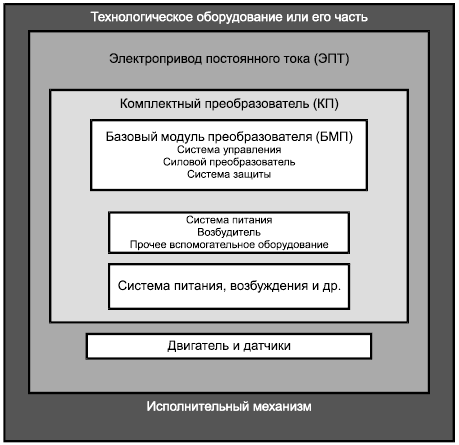
Рисунок 2 - Аппаратные составляющие ЭПТ
Примечание - Рисунок 2 представляет оборудование, сгруппированное по крупным модулям, определенным в данном разделе.
2.1.2.1 Базовый модуль преобразователя (БМП)
Часть электропривода, включающая преобразователь; систему управления скоростью, вращающим моментом, током или напряжением; силовую полупроводниковую систему защиты и т.д.
2.1.2.2 Комплектный преобразователь (КП)
Часть электропривода без двигателя и датчиков, которые механически соединены с валом двигателя, состоит из БМП и дополнительного оборудования, такого как система питания, возбудитель и прочее вспомогательное оборудование.
2.1.2.3 Технологическое оборудование
Оборудование включает в себя электропривод постоянного тока и исполнительный механизм.
2.2 Преобразователь
2.2.1 Преобразователь, общее назначение
Блок электронного преобразования энергии изменяет одну или несколько электрических величин с помощью одного или нескольких электронных ключей и сопутствующих компонентов, таких как трансформаторы, фильтры, аппараты коммутации, контроля, защиты и вспомогательное оборудование.
2.2.2 Выпрямление
Преобразование переменного тока в постоянный, осуществляемое преобразователем. Выпрямитель может быть как неуправляемым, так и управляемым.
Примечание - В контексте настоящего стандарта силовой преобразователь является выпрямителем.
2.2.3 Инвертирование
Преобразование постоянного тока в переменный, осуществляемое преобразователем.
Примечание - В контексте настоящего стандарта силовой преобразователь допускается использовать как инвертор.
2.2.4 Преобразователь со звеном постоянного тока
Преобразователь, включающий выпрямитель и коммутатор с промежуточным звеном постоянного тока.
2.2.5 Преобразователь с коммутацией по силовой цепи
Преобразователь, в котором коммутация производится питающим напряжением цепи переменного тока (преобразователь с непосредственной связью).
2.2.6 Прерыватель
Устройство, обеспечивающее преобразование нерегулируемого напряжения цепи постоянного тока в регулируемое (преобразователь постоянного тока) с помощью принудительной коммутации электронных ключей.
Примечание - В контексте настоящего стандарта принудительная коммутация означает управляемое запирание полупроводникового прибора в отличие от естественной коммутации, происходящей при нулевом токе через прибор.
2.2.7 Преобразователь - источник напряжения
Преобразователь, обеспечивающий регулируемое выходное напряжение на выходе, не зависящее от нагрузки.
Примечание - Термин "управляемый выпрямитель с жесткой характеристикой" имеет соответствующее физическое обоснование и использован во втором издании МЭК 60050-551.
2.3 Характеристики электропривода
2.3.1 Работа в двух квадрантах
Машина работает в качестве двигателя при вращении в одном направлении как генератор при противоположном вращении. Машина работает в I и II квадрантах, как изображено на графике зависимости момента от скорости (см. рисунок 3).
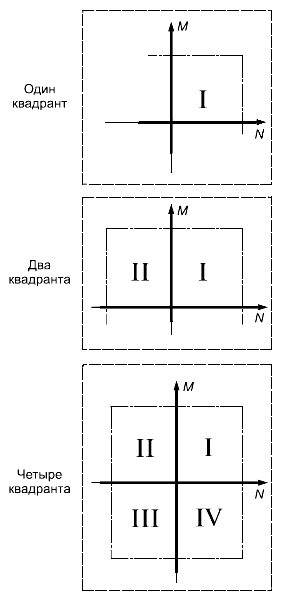
Рисунок 3 - Рабочие квадранты работы электропривода
2.3.2 Работа в четырех квадрантах
Машина работает как двигатель или генератор при любом направлении вращения. Машина работает в квадрантах I, II, III и IV, как показано на графике зависимости крутящего момента от скорости (см. рисунок 3).
2.3.3 Динамическое торможение
Процесс преобразования энергии вращения якоря и инерционной нагрузки в электрическую энергию, рассеиваемую на сопротивлении.
2.3.4 Рекуперация
Процесс преобразования механической энергии системы в электрическую энергию и передача ее в сеть. Электрическая машина в этом случае работает как генератор, а ее номинальные данные не соответствуют таковым для двигательного режима.
2.4 Входные параметры преобразователя, КП и БМП
2.4.1 Номинальное напряжение
Номинальное среднеквадратичное значение линейного напряжения сети на клеммах питания технологической установки, к которой подключается электропривод.
2.4.2 Номинальная частота
Частота входного переменного напряжения, измеряемая в герцах.
2.4.3 Линейное номинальное входное напряжение
Номинальное среднеквадратичное линейное входное напряжение на клеммах преобразователя, которое является его основной номинальной характеристикой.
Примечание - Данное напряжение может отличаться от номинального входного напряжения технологической установки ULN из-за использования трансформатора или ввиду влияния внутреннего сопротивления цепей питания. Трансформатор может быть установлен в некоторых устройствах при напряжении сети питания свыше 1000 В. В этом случае трансформатор и устройства защиты должны соответствовать стандартам. Емкостные наводки высокого напряжения от первичной ко вторичной цепи трансформатора должны шунтироваться цепями заземления (приложение В).
2.4.4 Линейный номинальный переменный ток
Максимальное среднеквадратичное значение тока на входе БМП/КП при стандартных условиях с учетом номинальной нагрузки и наиболее опасных сочетаний всех других условий, в пределах их диапазонов изменения, например, напряжения и частоты.
Примечание - Данный ток включает в себя токи питания вспомогательных цепей, БМП/КП, эффект пульсаций постоянного тока и контурных токов.
2.4.5 Номинальный входной ток
Максимальное среднеквадратичное значение тока на входе силового преобразователя при номинальных условиях с учетом номинальной нагрузки и наиболее опасных сочетаний всех других условий, в пределах их диапазонов изменения, например изменения напряжения и частоты.
2.4.6 Гармонический состав питания
Значение, получаемое путем вычитания из суммарного значения переменной на входе системы ее основной гармоники (по МЭК 551-07-04).
Примечание - Например, среднеквадратичное значение гармонических составляющих напряжения (всех, кроме 1-й гармоники) равно:
 .
.
2.4.7 Характеристики гармоник тока
Гармоники тока, производимые в процессе работы преобразователя, характеризуются их порядком. Например, в 6-импульсных преобразователях характерными гармониками тока являются не кратные трем дополнительные нечетные гармоники: ![]() (
( - любое целое число).
Примечание - В дополнение к гармоникам питающей сети могут быть и другие гармоники, появляющиеся в результате взаимодействия преобразователя с нагрузкой. Они называются внутренними гармониками.
2.4.8 Гармоническое искажение
В соответствии с общепринятой практикой под коэффициентом гармонических искажений понимают отношение среднеквадратичного значения всех высших гармонических составляющих к основной гармонике рассматриваемой переменной [МЭК 551-17-05 и МЭК 551-17-06, модифицировано].
и
определяют:
 ,
,  ,
,
где - полный коэффициент гармонических искажений;
- полный коэффициент гармоник;
- среднеквадратичное значение основной гармоники рассматриваемой переменной;
- общее среднеквадратичное значение переменной (ток или напряжение);
- номер гармоники;
- среднеквадратичное значение гармонической составляющей гармоники
.
В настоящем стандарте предельные значения этих коэффициентов определяют как отношение среднеквадратичного значения высших составляющих к соответствующему номинальному значению:
 и
и  .
.
Примечание 1 - Эти определения соответствуют второму изданию МЭК 551 и общепринятой практике. Форма напряжения сети менее искажена, чем форма входного тока. Таким образом, коэффициенты и
для напряжения примерно равны, в то время как для тока существенно различаются.
Примечание 2 - Важно отметить, что эти определения включают в себя внутренние гармоники. Когда они присутствуют, форма волны больше не является периодической, что может привести к более сложным эффектам, чем те, к которым приводят обычные гармоники. Если внутренние гармоники незначительны, эти уравнения упрощаются:
 и
и  ,
,
где - номинальное среднеквадратичное значение 1-й гармоники;
- общее номинальное среднеквадратичное значение.
Суммирование гармонических составляющих производится до 40 порядка, в соответствии с обычной практикой МЭК.
Примечание 3 - Для конкретного использования состав высших гармоник THD (от 14 до 40 включительно) называется коэффициентом частичных гармонических искажений PHD и четный состав высших гармоник (только четные гармоники) называется коэффициентом четных гармонических искажений EHD. Применительно к току:
 и
и  .
.
2.4.9 Коэффициент сдвига фаз на входе преобразователя ![]()
Косинус угла сдвига фаз между первыми гармониками фазных напряжения и тока на входе силового преобразователя.
2.4.10 Коэффициент сдвига фаз ![]()
Косинус угла сдвига фаз между первыми гармониками фазных напряжения и тока на входе комплектного преобразователя.
2.4.11 Коэффициент полной мощности
Отношение общей активной мощности к полной мощности, измеренной в месте подключения КП к сети.
Пример: в трехфазной системе, где напряжение синусоидальное:
 .
.
Примечание 1 - Коэффициент мощности включает в себя эффект от сдвига ![]() и гармоник за счет коэффициента искажения
и гармоник за счет коэффициента искажения ![]() .
.
Примечание 2 - Определение относится к входу преобразователя (индекс V) или к входу КП (индекс L).
2.4.12 Максимально допустимый переменный ток системы, симметричный ток короткого замыкания
Максимально допустимый симметричный ток короткого замыкания , как указано в техническом паспорте, может быть связан с основной гармоникой переменного тока
коэффициентом
.
представляет собой отношение мощности короткого замыкания источника к полной мощности преобразователя(ей) (см. МЭК 60146-1-1).
![]() .
.
Максимально допустимый симметричный ток короткого замыкания важен в вопросе защиты преобразователя. Относительная мощность короткого замыкания считается в точке общей связи (ТОС) (см. 1.5.35 МЭК 60146-1-1).
должен быть ограничен следующим
:
![]() ,
,
где равно основной гармонике
.
2.5 Выходные параметры КП, БМП и преобразователя
Символы, определенные в настоящем подразделе, включены в таблицу 1.
2.5.1 Выходной ток
Среднее значение тока в цепи постоянного тока за полный период частоты сети.
Примечание - Постоянный ток может также обозначать ток в промежуточном звене постоянного тока в преобразователе частоты с инвертором. Как правило, для обозначения выходного тока, например тока двигателя, используют обозначение
.
2.5.2 Номинальный выходной ток
Выходной ток, который при определенных условиях эксплуатации может протекать непрерывно без превышения установленных пределов.
Примечание - МЭК 61136-1 рекомендует шкалу значений номинального тока для различных режимов нагрузки.
2.5.3 Перегрузочная способность
Максимальный выходной ток, который может протекать в течение определенного периода времени, не превышая установленные пределы при определенных условиях эксплуатации.
2.5.4 Номинальная длительная выходная мощность
Активная мощность, которую преобразователь может подавать на нагрузку непрерывно без превышения установленных пределов.
2.5.5 Номинальное выходное напряжение
Заданное значение напряжения между зажимами цепи постоянного тока КП/БМП при номинальном токе и обычных условиях эксплуатации, указанных в разделе 4.
2.5.6 Пульсирующий ток и напряжение и
Периодическое переменное напряжение/ток накладывается на устойчивое постоянное напряжение/ток, как правило, выражаемое как удвоенная амплитуда. Если пульсация тока представляется как удвоенная амплитуда, измеряемая в амперах или рассчитанная на номинальное напряжение двигателя, то обозначается как .
Примечание - Пульсации тока также приводятся в качестве отношения ![]() (
( представляет собой среднее значение выходного тока (см. В.4.3.2), но
часто используют для определения параметров двигателя. Важно уточнить, какой коэффициент используют).
2.5.7 Коэффициент гармоник
Функция, полученная путем вычитания постоянной составляющей из несинусоидальных периодических функций на выходе преобразователя. Например, среднеквадратичное значение коэффициента гармоники тока:
 .
.
2.5.8 КПД ,
КПД ЭПТ - отношение мощности на валу двигателя к общей мощности, потребляемой от сети (см. рисунок 1), как правило, выражаемое в процентах. КПД КП
представляет собой отношение общей поданной мощности на якорь, возбудитель и пр. (вентилятор двигателя и т.д.) к общей мощности, потребляемой от сети (см. рисунок 1), как правило, выражаемое в процентах.
2.5.9 Максимальный ток возбуждения
Максимальный непрерывный ток возбуждения двигателя, который может подать преобразователь.
Примечание - Если используют неуправляемый преобразователь возбуждения, он должен быть рассчитан на максимальный ток возбуждения при холодном двигателе.
2.5.10 Номинальное напряжение питания обмотки возбуждения
Номинальное напряжение обмотки возбуждения двигателя, подключенной к преобразователю возбуждения.
2.6 Схема преобразователя и его элементы
2.6.1 Коммутирующий конденсатор
Конденсатор, который обеспечивает энергией самостоятельно коммутируемый тиристор в импульсном преобразователе с внутренней коммутацией.
2.6.2 Коммутирующий реактор
Реактор с одной или несколькими обмотками, которые изменяют или объединяют переходной ток, производимый при коммутации.
2.6.3 Цепь фильтрации переменного тока
Цепь предназначена для уменьшения гармонического состава потребляемого из сети тока.
2.6.4 Цепь коррекции коэффициента мощности
Цепь предназначена для улучшения коэффициента мощности сети. Эта цепь также уменьшает гармонический ток.
2.6.5 Конденсатор фильтра постоянного тока
Конденсатор подключен к выходу выпрямителя в преобразователе для снижения пульсаций напряжения.
2.7 Двигатели
2.7.1 Типы двигателей постоянного тока
Двигатели постоянного тока, как правило, оснащены независимым возбуждением (см. рисунок 1). Этот тип двигателя может быть скомпенсированным или нет. Целью компенсации является сведение к минимуму реакции якоря и увеличение коммутационной способности двигателя.
Примечание - Другие типы двигателей: двигатель с постоянными магнитами, с последовательной и смешанной обмоткой возбуждения.
2.7.2 Номинальное напряжение возбуждения в нагретом состоянии
Номинальное напряжение возбуждения при рабочей температуре.
2.7.3 Номинальная частота вращения
Скорость при номинальном напряжении якоря с номинальным током якоря и номинальным током возбуждения, как правило, это граничная точка между режимом работы с постоянным крутящим моментом и режимом с постоянной мощностью.
2.7.4 Максимальная безопасная частота вращения двигателя
Максимальная расчетная частота вращения двигателя, выше которой могут происходить механические деформации или ослабление прочности (см. МЭК 60034-1, пункт 21).
Примечание - Максимальная безопасная частота вращения исполнительного механизма может иметь меньшее значение.
2.7.5 Пульсации крутящего момента
Пульсации при циклических колебаниях крутящего момента двигателей измеряются как разность амплитуд момента.
2.8 Система управления
2.8.1 Регулируемая переменная
Основная, требующая регулирования переменная в системе управления регулируемых приводов постоянного тока с соответствующим контуром обратной связи. Примеры регулируемых переменных: скорость, напряжение якоря, ток якоря и ток возбуждения.
2.8.2 Служебная переменная
Переменная, обычно связанная с внешними условиями (например, с температурой) для которой система управления с обратной связью обеспечивает требуемое значение регулируемой переменной.
2.8.3 Рабочая переменная
Главная переменная (например, нагружающий момент для привода с регулируемой частотой вращения), при изменении которой система управления с обратной связью сохраняет требуемое значение регулируемой переменной в реальных условиях эксплуатации.
2.8.4 Переменные системы управления с обратной связью
Совокупность служебных и рабочих переменных, определяющих все ошибки, которые система управления с обратной связью пытается исправить с помощью регулируемых переменных. Точность управления при этом определяется как ширина зоны допустимых отклонений, в рамках которой система управления с обратной связью будет регулировать управляемую величину.
3 Функциональные особенности
3.1 Эксплуатационные
КП должен выполнять одну или несколько следующих функций, не ограничиваясь ими:
- ускорение, регулируемое во времени;
- замедление, регулируемое во времени;
- толчок;
- регулируемое ограничение тока;
- динамическое торможение;
- реверс;
- рекуперация;
- фильтрация;
- ввод/вывод данных (аналоговый/цифровой);
- автоматический перезапуск.
3.2 Контроль неисправностей
КП должен сообщать о неисправностях. Сообщением о неисправности может быть как общая тревога, так и сигнал соответствующей ошибки, обеспеченный контактами электромеханических или электронных реле. Сообщения о неисправности в КП могут быть следующего характера, но не ограничиваться приведенными ниже.
- внешние неисправности;
- перегорание предохранителя;
- мгновенная перегрузка по току;
- перегрев (преобразователя);
- потеря подачи охлаждающего воздуха;
- перегрузка двигателя;
- неисправности вспомогательного электроснабжения;
- подача повышенного/пониженного напряжения;
- обрыв фазы питания;
- перегрузка двигателя по напряжению;
- превышение скорости и/или неисправность датчика скорости;
- потеря возбуждения;
- внутренняя неисправность системы управления;
- диагностика силовой цепи и цепи управления.
3.3 Минимальные требования к индикации состояния
КП должен быть оборудован сигналом "привод включен" (будь то состояние вращения или покоя). Также КП может быть оснащен сигналом "привод готов к работе".
3.4 Устройства ввода/вывода
Число интерфейсов и способ ввода/вывода должны быть указаны заводом-изготовителем. Любые изменения должны быть согласованы между изготовителем и потребителем.
Примечание - Устройства ввода и вывода необходимы для переменных и параметров. Они могут быть как аналоговыми, так и цифровыми и могут использовать напряжение или ток. В соответствии с различными стандартами соединения (коммутации) они могут быть последовательными или параллельными. Используя панель управления, можно вручную установить аналоговые и цифровые переменные, и они могут быть прочитаны на дисплеях. Переменные и параметры обрабатывают таким же образом.
4 Условия эксплуатации
4.1 Установка и эксплуатация
Оборудование, в рамках настоящего стандарта, должно работать в условиях, перечисленных в 2.2 и 2.3 МЭК 60146-1-1 и МЭК 106, если не внесены изменения.
4.1.1 Условия электрического обслуживания
КП или БМП могут быть спроектированы для работы в приведенных ниже условиях эксплуатации. Указанные значения включают в себя влияние рассматриваемой системы привода.
Требования к электромагнитной совместимости (ЭМС) для систем силового привода приведены в МЭК 61800-3.
Примечание - Пределы, указанные в 4.1.1.1-4.1.1.5 и соответствующие стандартам ЭМС, применяемые в существующей практике для полупроводниковых преобразователей, приведены в 2.5.1-2.5.3 МЭК 60146-1-1 и соответствуют классу В.
4.1.1.1 Изменение частоты
Частота ±2% (±4% для локальных сетей питания) в соответствии с классом 3 определена в МЭК 61000-2-4.
Скорость изменения частоты не более 2% /c.
(См. также 5.2.3.2 МЭК 61800-3).
4.1.1.2 Изменение напряжения
Пределы напряжения для бесперебойной работы
В соответствии с классом 2, определенным в МЭК 61000-2-4 [см. также МЭК 61800-3 (подпункты 5.2.2.1 и 5.2.2.2)], электропривод постоянного тока (ЭПТ) должен иметь номинальное входное напряжение ±10% (в точке присоединения).
Примечание - Кратковременное изменение напряжения выше указанных уровней может привести к нестабильной работе или отключению. В случае необходимости непрерывной работы, необходимо соглашение между потребителем и поставщиком/производителем.
Пределы напряжения для номинальной производительности
Нормальное функционирование преобразователя должно быть обеспечено при изменении основной гармоники напряжения питания сети переменного тока, измеренной на входе БМП, в пределах 100% - 110% от номинального значения. Нормальная работа на напряжении ниже 100% номинального должна быть предметом соглашения между пользователем и поставщиком/производителем.
Примечание - См. также 5.2.1.
4.1.1.3 Дисбаланс напряжения
ЭПТ должен работать с дисбалансом напряжения (в точке присоединения), не превышающим 3% основного номинального напряжения . См. 5.2.3.1 и В.3 МЭК 61800-3 для определения и расчета.
4.1.1.4 Сопротивление источника
Для обеспечения номинальной производительности минимальное соотношение для ЭПТ в точке присоединения должно быть равно 20.
Примечание 1 - Большее сопротивление источника может привести к ухудшению коэффициента демпфирования сглаживающих фильтров, что может привести к возможному отказу и увеличению времени провала напряжения.
Примечание 2 - Для определения максимального соотношения необходимо следовать документации производителя.
4.1.1.5 Гармоники и коммутационные провалы
a) Гармоники
Оборудование в соответствии с настоящим стандартом должно быть предназначено для работы с напряжением, полный коэффициент гармонического искажения () которого равен в точке присоединения 10% в установившемся состоянии и 15% - в течение переходного периода (менее 15 с) в соответствии с классом 3, определенным в МЭК 61000-2-4 (см. также 5.2.1 МЭК 61800-3).
Примечание - Допустимые уровни для отдельных гармонических напряжений приведены в таблицах 3-5 МЭК 61000-2-4.
Теоретический пример гармонического искажения (приложение В.5) представляет собой практическую оценку соотношений между эмиссией и устойчивостью, принимая во внимание влияние самого привода, как указано в 4.1.
b) Коммутационные провалы
Оборудование должно соответствовать номинальной производительности со следующими пределами, на входе КП/БМП (см. 2.5.4.1 МЭК 60146-1-1, устойчивость класса В):
- глубина коммутационного провала - 40% ![]() ;
;
- длительность коммутационного провала - 250%градусы.
4.1.1.6 Повторяющиеся и неповторяющиеся переходные процессы
Как показано на рисунке 4, форма кривой напряжения переменного тока содержит повторяющиеся и неповторяющиеся переходные процессы.
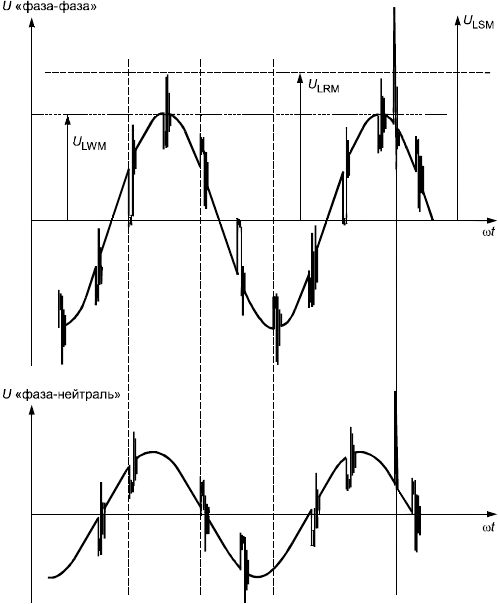
Рисунок 4 - Типичная форма кривой напряжения переменного тока в 6-импульсном преобразователе
Переходные процессы могут быть вызваны переключением преобразователя, подключением к сети и помехами в энергосистеме.
БМП должны быть спроектированы для работы в среде с неповторяющимися переходными процессами, вызванными переключением трансформатора, при условии, что силовой трансформатор рассчитан на мощность, не более чем в пять раз превышающую полную мощность рассматриваемого привода. Если трансформатор рассчитан на большую мощность, БМП должен иметь способность поглощать энергию дополнительных переходных процессов.
Примечание - Типичный диапазон значений в относительных единицах предоставляется только для ознакомления. Рисунок предполагает, что нет сопротивления между клеммами ЭПТ и КП.
Для повторяющихся переходных процессов соотношение ![]() составляет 1,25:1,50 в зависимости от конструкции снаббера, спроектированного с учетом
составляет 1,25:1,50 в зависимости от конструкции снаббера, спроектированного с учетом ![]() и IRR.
и IRR.
Для неповторяющихся переходных процессов соотношение ![]() составляет 1,80:2,50 в зависимости от установленных дополнительных защитных устройств.
составляет 1,80:2,50 в зависимости от установленных дополнительных защитных устройств.
Энергия (в джоулях) неповторяющихся переходных процессов, вызванная переключением трансформатора, непосредственно связана с энергией намагниченности питающего ЭПТ трансформатора. Энергию можно вычислить по формуле
![]() ,
,
где выражается в MBA и равна:
![]() ,
,
где - номинальное напряжение системы;
- линейный номинальный переменный ток.
При этом приняты следующие допущения:
- ток намагничивания составляет 5%;
- переключение происходит в точке максимального высвобождения энергии.
Примечание - Если известны характеристики трансформатора, могут быть сделаны конкретные расчеты.
4.1.1.7 Особые условия
Особые условия, такие как особые рабочие режимы, несбалансированное сопротивление системы переменного тока, чрезвычайно сильные магнитные поля, особо высокий уровень радиочастотных помех (например, от передатчиков связи), а также дополнительные сопротивления вне КП или БМП, которые были добавлены после приемо-сдаточных испытаний, оговариваются, если они известны или определены.
4.1.2 Условия окружающей среды при эксплуатации
4.1.2.1 Климатические условия
КП должен работать в условиях окружающей среды, указанных в МЭК 60721-3-3 для класса 3K3, и разделе 2 МЭК 60146-1-1 для охлаждающих жидкостей, воды и масла. Они включают в себя:
a) температуру охлаждающего агента:
воздух: от 0 °С до 40 °С,
вода: от 5 °С до 30 °С,
масло: от минус 5 °С до плюс 30 °С;
b) температуру окружающей среды от 5 °С до 40 °С;
c) относительную влажность от 5% до 85% без конденсации;
d) содержание пыли и твердых частиц:
стандартное оборудование предназначено для чистого воздуха, см. 2.5.1 МЭК 60664-1, степень загрязнения 2; любое другое условие представляет собой "особое условие эксплуатации" и требует указаний заказчика, см. МЭК 60529 для степени защиты корпуса;
e) периоды работы без нагрузки должны быть указаны, даже если температура окружающей среды в диапазоне, определенном выше.
4.1.2.2 Механические условия установки
КП/БМП должен быть установлен в закрытом помещении на жестком основании в открытой зоне или дополнительном корпусе, которые не препятствуют вентиляции или системе охлаждения. Кондиционеры могут быть установлены для повышения надежности КП/БМП.
Другие условия установки требуют специального рассмотрения и согласования с производителем.
Вибрация должна оставаться в пределах, установленных МЭК 60721-3-3 по классу 3М1, которая считается нормальной для стационарного оборудования.
Таблица 3 - Пределы вибрации при установке
Частота, Гц | Амплитуда, мм | Ускорение, м/с |
2 | 0,3 | Нет данных |
9 | Нет данных | 1 |
Вибрации, превышающие эти пределы, или использование нестационарного оборудования считаются особыми механическими условиями.
4.1.3 Особые условия эксплуатации
Использование силового преобразователя, системы управления приводом, а также приводной техники в условиях, отличных от обычных условий, перечисленных в МЭК 60146-1-1, считаются особыми. Эти особые условия обслуживания должны быть указаны покупателем.
Для особых условий эксплуатации, подобных перечисленным ниже, могут потребоваться специальная конструкция или защитные устройства. Должны быть указаны следующие факторы воздействия:
a) вредные газы;
b) повышенная влажность (относительная влажность более 85%);
c) повышенное содержание пыли;
d) абразивная пыль;
e) конденсации пара или воды;
f) пары масла;
g) взрывоопасные смеси пыли и газов;
h) соленый воздух;
i) ненормальные вибрации, удары и наклон;
j) погода или попадание воды;
k) неправильные транспортирование или условия хранения;
I) резкие перепады температуры;
m) особые ограничения пространства;
n) охлаждающая жидкость, содержащая кислоту или примеси, которые вызывают накипь, осадок, электролиз или коррозию;
о) высокий уровень радиации;
р) высота выше 1000 м (3300 футов);
q) большой период работы без нагрузки;
r) использование оборудования вне помещения.
4.1.4 Монтаж, наладка и эксплуатация
Монтаж, наладка и эксплуатация оборудования имеют нормальные и особые условия выполнения.
4.2 Хранение оборудования
Если упаковка не предназначена для наружного или незащищенного хранения, оборудование сразу же после получения должно быть расположено под соответствующим укрытием.
4.2.1 Климатические условия
Оборудование следует хранить при условиях окружающей среды, указанных в МЭК 60721-3-1. Они включают в себя следующее:
a) класс окружающей температуры: 1K4: от минус 25 °С до плюс 55 °С;
b) класс относительной влажности: 1K3: от 5% до 95%.
Модули и панели должны быть защищены от конденсации. Если оборудование не устанавливают сразу, то его следует хранить в чистом, сухом месте, защищенном от перепадов температуры, высокой влажности и пыли. Если возможно, необходимо избегать резких изменений температуры и влажности. Если температура складского помещения отличается от температуры поверхности оборудования, оно подвержено конденсации или замерзанию, оборудование должно быть защищено безопасной, надежной системой обогрева, которая будет поддерживать температуру оборудования немного выше, чем в складском помещении. Если оборудование выдерживалось при низкой температуре в течение длительного периода времени, оно не должно распаковываться, пока не достигнет температуры помещения, в противном случае образуется конденсат. Наличие влаги на определенных внутренних частях электрооборудования может стать причиной его повреждения.
4.2.2 Особые факторы риска при хранении
Следующие факторы требуют особенного внимания:
a) вода, за исключением оборудования, специально предназначенного для наружной установки.
Оборудование должно быть защищено от дождя, снега, обледенения и т.п.;
b) высота.
Оборудование не следует хранить на высоте выше 3000 м над уровнем моря;
c) агрессивные вещества.
Оборудование должно быть защищено от солевого тумана, опасных газов, агрессивных жидкостей и т.п.;
d) срок хранения.
Вышеуказанные требования распространяются на поставку и хранение с общей продолжительностью до 6 мес, более длительный срок требует специального рассмотрения (т.е. уменьшенный диапазон изменения температуры окружающей среды, такой как по классу 1K3);
е) грызуны и плесень.
Когда условия хранения связаны с возможным появлением грызунов или плесени, технические характеристики оборудования должны включать защитные меры.
Материалы снаружи оборудования и размеры отверстий для охлаждения, подключения и т.п. должны быть указаны, для того чтобы препятствовать проникновению грызунов.
Должны быть указаны материалы с подходящей степенью плеснестойкости для складских и рабочих помещений.
4.3 Транспортирование
4.3.1 Климатические условия
Оборудование должно иметь возможность транспортирования в стандартной упаковке поставщика при внешних условиях, указанных в МЭК 60721-3-2, класс 2K3.
Условия включают в себя:
a) температуру окружающей среды: от минус 25 °С до плюс 70 °С.
Примечание - Температурные пределы подразумевают температуру среды, окружающей оборудование (например, внутри контейнера);
b) относительную влажность: 95% при 40 °С.
Примечание - Некоторые сочетания температуры и влажности могут быть причиной конденсации.
4.3.2 Особые климатические условия
При температуре транспортирования ниже минус 25 °С необходимо заранее позаботиться об использовании обогреваемого транспорта или, при необходимости, снятии элементов, чувствительных к пониженным температурам.
4.3.3 Механические требования
Оборудование должно иметь возможность транспортирования в стандартной упаковке производителя в пределах, установленных в МЭК 60721-3-2 по классу 2М1.
Они включают в себя вибрации и ударные нагрузки в соответствии с таблицами 4 и 5.
Таблица 4 - Пределы вибрации при транспортировании
Частота, Гц | Амплитуда, мм | Ускорение, м/с |
2 | 3,5 | Нет данных |
9 | Нет данных | 10 |
200 | Нет данных | 15 |
Таблица 5 - Пределы ударной нагрузки при транспортировании
Масса, кг | Высота свободного падения, м |
| 0,25 |
20 | 0,25 |
100 | 0,10 |
Примечание 1 - Если ожидаются ударные нагрузки и вибрация окружающей среды, превышающие эти пределы, необходимы специальная упаковка или транспортирование.
Примечание 2 - Если заранее известно, что среда имеет меньшее влияние, упаковка может иметь сниженные требования по соглашению между производителем/поставщиком, потребителем и перевозчиком.
5 Номинальные параметры
5.1 Входные параметры преобразователя
5.1.1 Входное напряжение
Входные параметры преобразователя должен определять производитель. Предпочтительными значениями являются:
а) 100, 110, 200, 220, 230*, 240, 380, 400*, 415, 440, 500, 660, 690* В при 50 Гц;
б) 100, 115, 120, 200, 208, 220, 230, 240, 400, 440, 460, 480, 575, 600 В при 60 Гц.
_______________
* Стандартные напряжения согласно МЭК 60038.
5.1.2 Входной ток
Существуют два типа входных токов:
- собственный ток преобразователя: .
Это значение должно быть указано производителем при минимальном входном сопротивлении линии переменного тока;
- КП или БМП: .
Это значение включает в себя ток, необходимый вспомогательному оборудованию .
5.2 Выходные параметры преобразователя
5.2.1 Постоянные выходные параметры
Постоянные выходные параметры должны быть указаны производителем и представлены напряжением и током
.
Номинальная выходная мощность может также предоставляться как параметр, помогающий потребителю в выборе двигателя.
Примечание 1 - Параметры и
позволяют использовать методики прямого измерения и в достаточной мере обосновать допустимую токовую нагрузку проводника.
Примечание 2 - Когда КП и двигатель поставляются разными производителями/поставщиками, необходим обмен информацией для надлежащего выполнения и совместимости КП и двигателя.
5.2.2 Перегрузочная способность
Электропривод постоянного тока (ЭПТ) должен быть рассчитан на один из следующих вариантов перегрузочной способности, применяемых для номинального диапазона скорости, если не указано иное (см. также примечание 3).
a) Происходит непрерывная работа при номинальном выходном токе (для достижения двигателем номинального теплового режима), затем проходит 150% номинального выходного тока на протяжении 45 с, после чего следует период при токе нагрузки, меньшем номинального, и такой продолжительности, что среднеквадратичный выходной ток за рабочий цикл не превышает номинальный выходной ток
.
Пример - Если рабочий цикл требует 150% номинального тока на 30 с через каждые 5 мин, оставшиеся 4,5 мин должны происходить приблизительно при 92% номинального тока или меньше, чтобы поддерживать среднеквадратичное значение не более 100%. Если требуется 30 с из 30 мин, оставшиеся 29,5 мин должны происходить приблизительно при не более 98% номинального тока.
Примечание 1 - Для перегрузки, вызванной избыточными токами двигателя по МЭК 60034-1 (см. п.18.3) рекомендуются следующие интервалы перегрузки:
- 45 с для машин с выходным параметром не более 1 кВт на 1 об/мин;
- 30 с для машин с выходным параметром более 1 кВт на 1 об/мин.
Существуют альтернативные варианты: происходит непрерывная работа при номинальном выходном токе, равном 150% номинального выходного тока в течение 1 мин, затем следует период тока нагрузки, меньший номинального тока и такой продолжительности, что среднеквадратичный выходной ток за рабочий цикл не превышает номинальный выходной ток
.
Пример - Если рабочий цикл требует 150% номинального тока в течение 1 мин на каждые 10 мин, оставшиеся 9 мин должны происходить приблизительно при 92% номинального тока или меньше, чтобы поддерживать среднеквадратичное значение не более 100%. Если требуется 1 мин из 60 мин, оставшиеся 59 мин должны происходить приблизительно при не более 98% номинального тока.
b) Происходит непрерывная работа при номинальном выходном токе, равном 125% номинального выходного тока за 1 мин, затем следует интервал с током нагрузки, меньшим номинального для оставшейся продолжительности, что среднеквадратичный выходной ток за рабочий цикл не превышает номинальный выходной ток
.
Пример - Если рабочий цикл требует 125% номинального тока на 1 мин на каждые 10 мин, оставшиеся 9 мин должны происходить приблизительно при не более 96% номинального тока, чтобы поддерживать среднеквадратичное значение не более 100%. Если требуется 1 мин из 60 мин, оставшиеся 59 мин должны происходить приблизительно при не более 99% номинального тока.
с) Происходит непрерывная работа при номинальном выходном токе, равном 110% номинального выходного тока на протяжении 1 мин, затем следует интервал с током нагрузки меньшем, чем номинальный и такой продолжительности, что среднеквадратичный выходной ток за рабочий цикл не превышает номинальный выходной ток
.
Пример - Если рабочий цикл требует 110% номинального тока на 1 мин на каждые 10 мин, оставшиеся 9 мин должны происходить приблизительно при не более 98% номинального тока, чтобы поддерживать среднеквадратичное значение не более 100%. Если требуется 1 мин из 60 мин, оставшиеся 59 мин должны происходить приблизительно при не более 99% номинального тока.
Примечание 2 - Отношение между заданными токами перегрузки и моментом вращения, создаваемым двигателем, не попадает под вышесказанное.
Примечание 3 - Особые условия перегрузки могут быть согласованы между потребителем и производителем/поставщиком. Например, величина перегрузки и ее продолжительность могут быть предметом такого соглашения, примеры режимов работы приведены в МЭК 60146-1-1 (таблица 3). См. также 2.5.2, где отмечено, что сложные режимы могут быть рассмотрены в МЭК 61136-1.
5.2.3 Диапазон скоростей
Скорость следует регулировать в диапазоне не менее чем 8:1 при регулировании напряжения на обмотке якоря.
Диапазон скоростей может быть расширен ослаблением поля двигателя до достижения максимальной скорости в зависимости от параметров двигателя (см. рисунок А.1).
Примечание - Регулирование скорости вниз от основной.
Двигатели способны работать при любой скорости в пределах диапазона номинальной скорости. При непрерывной работе, номинальном крутящем моменте и скоростях ниже номинальной превышение температуры двигателя может превысить номинальное значение для полной нагрузки.
Чтобы соответствовать указанному рабочему циклу и требованиям к моменту вращения нагрузки, приведенным в приложении А, конструкцией приводной системы должно быть предусмотрено обеспечение достаточного момента вращения с пониженной скоростью при безопасном увеличении температуры двигателя.
5.2.4 Оценка напряжения постоянного тока
Операция инвертирования может потребовать снижения напряжения на якоре.
Трехфазный ведомый сетью преобразователь может отказать в режиме инвертирования из-за избыточного соотношения постоянного/переменного тока. Соотношение может иметь большое значение из-за слабой сети переменного тока или большого напряжения на клеммах двигателя.
Сеть переменного тока может оказаться слабой из-за большого пускового тока двигателя, который вызывает провал напряжения сети, или из-за провала напряжения, вызванного другим преобразователем.
Чрезмерное напряжение на зажимах двигателя может быть вызвано большой противо-ЭДС двигателя или высокой скоростью снижения тока двигателя (производная тока якоря, умноженная на индуктивность двигателя, приводит к увеличению напряжения на выводах электродвигателя).
Характерное отношение постоянного тока к переменному для обычных промышленных условий составляет около 1,01 или 1,02 (отношение постоянного тока к переменному равно суммарной ЭДС двигателя (ЭДС+![]() ), разделенной на номинальное напряжение сети переменного тока).
), разделенной на номинальное напряжение сети переменного тока).
5.3 Коэффициент полезного действия и потери
Должно быть указано оборудование, включенное в определение полного коэффициента полезного действия (КПД).
Потери или КПД ЭПТ или КП/БМП (см. 2.5.8) должны быть указаны производителем при номинальной нагрузке и основной скорости.
Примечание - Потери на вентиляцию в приводах с принудительной вентиляцией, как и с самовентиляцией включены в потери ЭПТ, в обоих случаях они не включаются в потери КП.
Пример изменения КПД и потерь в функции скорости приведен на рисунке 5.
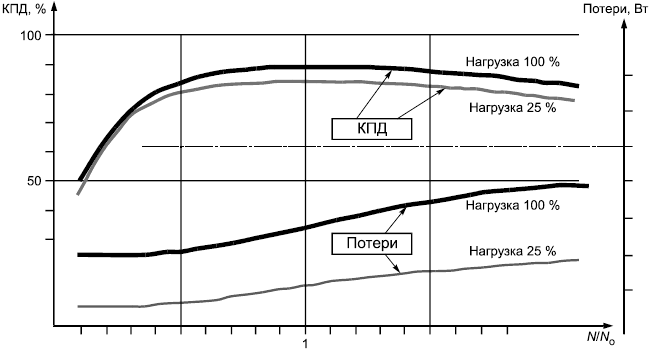
Рисунок 5 - Типовые кривые для КПД и потерь электропривода
5.4 Пульсации выпрямленного тока
Гармонический состав пульсаций преобразователя зависит от типа преобразования, как указано ниже (см. рисунок Е.1):
тип А - генератор постоянного тока:
- аккумулятор,
- многофазный выпрямитель, имеющий не менее 12 импульсов за цикл и максимальный диапазон фазового регулирования 15%,
- любой источник питания, имеющий достаточную индуктивность цепи нагрузки для получения двойной амплитуды пульсации тока якоря не более 6%;
тип В - трехфазный источник питания с двухполупериодным выпрямителем, имеющий 12 управляющих импульсов за цикл, без разрядного диода и без последовательной индуктивности в цепи якоря электродвигателя;
тип С - трехфазный источник питания с двухполупериодным выпрямителем, имеющий шесть управляющих импульсов за цикл, без разрядного диода и без последовательной индуктивности в цепи якоря электродвигателя;
тип D - трехфазный полумостовой источник питания, имеющий три управляющих импульса за цикл, с разрядным диодом и без последовательной индуктивности в цепи якоря электродвигателя;
тип Е - трехфазный однополупериодный источник питания, имеющий три управляющих импульса за цикл, без разрядного диода и последовательной индуктивности в цепи якоря электродвигателя;
тип K - однофазный источник питания с двухполупериодным выпрямителем, имеющий два полных импульса и два управляющих импульса за цикл, с разрядным диодом и без последовательной индуктивности в цепи якоря электродвигателя;
тип L - однофазный источник питания с двухполупериодным выпрямителем, имеющий два управляющих импульса за цикл, без разрядного диода и последовательной индуктивности в цепи якоря электродвигателя.
Примечание 1 - Значение пульсации растет с увеличением в буквенном обозначении. Поэтому двигатель, предназначенный для использования с каким-либо типом преобразователя, может быть использован с любым преобразователем, обозначенным предыдущими буквами.
Примечание 2 - Общее определение содержания пульсаций приведено в 2.5.6.
5.5 Трансформаторы и реакторы
Трансформаторы и реакторы должны соответствовать МЭК 60146-1-3.
Дополнительная информация предоставлена в приложении С.
6 Требования к режимам работы
6.1 Установившийся режим
Установившийся режим для переменных привода, таких как скорость вращения, вращающий момент и т.д., должен быть указан в соответствии с 6.1.1-6.1.4 (см. приложение D).
6.1.1 Диапазон отклонения (см. рисунок 6)
Диапазон отклонения - общее отклонение непосредственно регулируемой переменной (если не указана другая переменная) в установившемся режиме как результат изменений в режиме работы или условиях эксплуатации в заданных пределах. Он выражен:
a) в процентах от максимального заданного значения непосредственно регулируемой переменной (или указано иное), см. пример в 6.1.2;
b) как абсолютное значение переменной для систем, в которых трудно определить базовое значение переменной, например систем управления положением или температурой воздуха.
6.1.2 Выбор установившихся диапазонов отклонений
Установившаяся характеристика системы регулирования с обратной связью должна быть описана двумя цифрами, выбранными из таблицы 6 (иные уровни могут быть определены по согласованию).
Должен быть указан диапазон отклонения переменной, для которой определяют рабочий и эксплуатационный диапазоны отклонений (см. рисунок 6).
Первое число представляет рабочий диапазон отклонения, он должен соответствовать максимальному диапазону отклонения под влиянием изменения рабочей переменной(ых) электропривода, а второе число отображает эксплуатационный диапазон отклонения, который соответствует максимальному диапазону отклонения под влиянием изменений внешних условий эксплуатации.
Теоретически суммарное отклонение может быть равно сумме максимальных отклонений, однако маловероятно, что этот предел будет достигнут на практике.
Таблица 6 - Максимальный диапазон отклонений в процентах
±20 | ± 10 | ±5 | ±2 | ± 1 | ±0,5 | ±0,2 | ±0,1 | ±0,05 | ±0,02 | ±0,01 |
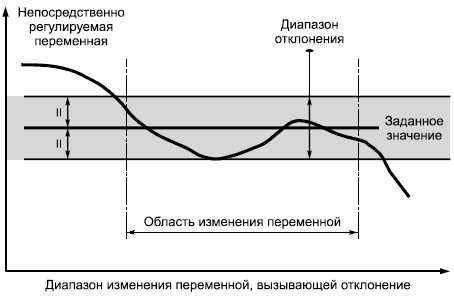
Рисунок 6 - Диапазон отклонения
Пример 1 - Диапазон рабочего отклонения 0,1% и диапазон эксплуатационного отклонения 0,2% определяют систему с максимальным диапазоном отклонения из-за рабочих параметров ±0,1% и максимальным диапазоном отклонения из-за условий эксплуатации ±0,2%.
Пример 2 - Диапазон отклонения измеряют по отношению к максимальному заданному значению в процентах. С ослаблением поля системы с шести до одного (см. рисунок А.1) и 1% системы обратной связи по скорости получены следующие результаты:
заданное максимальное значение | - | 1800 | об/мин; |
отклонение | - | ±18 | об/мин; |
1/10 максимального значения | - | 180 | об/мин; |
отклонение | - | ±18 | об/мин; |
базовая скорость | - | 300 | об/мин; |
отклонение | - | ±18 | об/мин. |
Примечание - Отклонение скорости в электроприводе с обратной связью по напряжению, как правило, находится в диапазоне от ± 20% до ± 2%.
6.1.3 Диапазон эксплуатационного отклонения (предельные значения)
Указанный эксплуатационный диапазон отклонений (выбранный из таблицы 6) не должен быть превышен при любом сочетании соответствующих условий эксплуатации в любое время в течение любого одночасового интервала после указанного производителем прогрева с фиксированными значениями рабочих переменных в процессе наблюдения.
6.1.4 Диапазон рабочего отклонения (предельные значения)
Рабочий диапазон отклонений, непосредственно регулируемый переменной (выбранный из таблицы 6), не должен превышаться для указанного диапазона изменения рабочей переменной. Условия эксплуатации должны поддерживаться постоянными в процессе наблюдения.
Примечание - Если требуется объект применения, эксплуатационная информация должна также включать в себя данные об установившемся отношении непосредственно регулируемой переменной к ее опорному значению. Этот вопрос не включен в обсуждаемые выше диапазоны рабочего или эксплуатационного отклонения.
6.1.5 Разрешающая способность
Разрешающая способность отображает минимально достижимое изменение регулируемого параметра. Она может быть представлена в абсолютном значении или в процентах максимального значения.
6.2 Переходные процессы
Если важно поведение в динамике, должны быть указаны необходимые динамические характеристики при соответствующих возмущениях (см. приложение D).
Такие возмущения могут быть вызваны опорными сигналами, источником питания и реакцией на управляющую переменную.
6.3 Динамическое торможение и динамическое замедление
Динамическое торможение использует дополнительные поглощающие элементы (резисторы), что позволяет останавливать электрическую машину быстрее.
Здесь рассматривается только динамическое торможение, при котором энергия движения рассеивается на резисторе в цепи якоря двигателя постоянного тока.
Динамическое торможение и динамическое снижение скорости являются функциями, характеристики которых должны быть согласованы между потребителем и производителем/поставщиком. Следующие подпункты могут быть изменены путем переговоров.
6.3.1 Динамическое торможение
При динамическом торможении необходимо обеспечить следующие условия:
a) преобразователь в зависимости от параметров должен быть в состоянии остановить нагрузку при токе 110%, 125% или 150% номинального;
b) тормозной резистор должен иметь возможность поглощать накопленную двукратную энергию двигателя при максимальной скорости (резистор сначала находится при температуре окружающей среды);
c) приводные системы с большой переменной инерцией исполнительного оборудования (такого как моталки) должны иметь возможность снижать скорость при максимальном количестве накопленной энергии; тормозной резистор находится изначально при температуре окружающего воздуха, значение рассеиваемой им энергии должно быть достаточным, чтобы останавливать приводную системы сразу же при любой рабочей скорости; максимальный ток динамического торможения якоря при максимальной скорости составляет 150%; в этом случае момент инерции исполнительного оборудования должен быть указан пользователем.
Примечание - Значение тока 150% является типовым, но может быть выбрано иное согласно конкретным условиям перегрузки (например, 110% для вентиляторов).
6.3.2 Динамическое снижение скорости
Для одноквадрантного преобразователя.
При обеспечении динамического снижения скорости резисторы должны иметь способность поглощать полную накопленную энергию якоря и исполнительного оборудования при двух последовательных торможениях от максимальной до минимальной скорости (с резистором при температуре окружающей среды в исходном состоянии).
Примечание - Максимальная полная инерция исполнительного оборудования рассматривается как однократная для двигателя постоянного тока.
6.4 Другие требования
Другие требования к рабочим характеристикам должны быть определены покупателем или производителем совместно с покупателем, например с включением следующих пунктов.
6.4.1 Использование двигателя:
- низкочастотный шум;
- рабочие квадранты (см. рисунок 3): обычными комбинациями являются квадранты I, I и II или все квадранты;
- момент вращения как функция скорости (см. рисунок А.1);
- особые механические требования (см. D.4.3).
6.4.2 Использование двигателя при подключении и питании:
- заземление (см. В.2);
- коэффициент сдвига фаз при номинальных условиях (см. 2.4.9);
- содержание гармоник со стороны питания (см. 4.1.1.5 и В.3);
- максимальное симметричное короткое замыкание, короткое замыкание.
6.4.3 Номинальные значения:
- номинальный длительный выходной ток (см. 2.5.2 и 5.2.1);
- номинальное выходное напряжение (см. 2.5.5 и 5.2.1).
6.4.4 Устройства защиты
6.4.4.1 Устройства защиты от токов перегрузки
Настройка устройств защиты от токов перегрузки не должна превышать рабочий предел номинального значения выходного тока БМП.
6.4.4.2 Управление разгоном
Двигатели должны иметь ограничение по току или регулирование ускорения по времени.
6.4.4.3 Регулирование возбуждения электродвигателя постоянного тока
Регулирование возбуждения двигателя может быть причиной генерации, причиняющей вред напряжению и/или току в цепи якоря, это означает, что должно быть обеспечено автоматическое предотвращение таких причин.
6.4.4.4 Защита от обрыва обмотки возбуждения
Должна быть обеспечена, если она не обеспечивается другими средствами.
6.4.4.5 Превышение скорости и обратная связь по скорости для защиты от обрыва
Должна быть обеспечена, если используется обратная связь по скорости и безопасная максимальная скорость может быть превышена.
6.4.4.6 Защита вентилятора от повреждения
Приводные системы, поставляемые с вентиляторами, должны иметь защиту от повреждения вентилятора.
7 Испытания
7.1 Классификация испытаний
7.1.1 Типовое испытание: испытание проводят для одного или более устройств определенной конструкции, чтобы показать, что она соответствует техническим условиям [МЭК 151-04-15].
7.1.2 Контрольное испытание: испытание, которому подлежит каждое отдельное устройство, в процессе или после производства, чтобы выяснить соответствие определенному критерию [МЭК 151-04-16].
7.1.3 Выборочное испытание: испытание определенного количества устройств, взятых из партии в произвольном порядке [МЭК 151-04-17].
7.1.4 Специальное испытание: дополнительное испытание к типовым и контрольным, проводимое производителем, имеющим соответствующие полномочия, или по договоренности между производителем и заказчиком или его представителем.
7.1.5 Цеховое испытание: испытание, выполняемое на заводе или в лаборатории производителя для проверки конструкции.
7.1.6 Приемо-сдаточное испытание: договорное испытание для подтверждения заказчику, что устройство соответствует установленным техническим условиям [МЭК 151-04-20].
7.1.7 Пусковое испытание: испытание устройства или оборудования проводят на строительной площадке для подтверждения правильности установки и работы [МЭК 151-04-21].
7.1.8 Испытание в присутствии заказчика: любое из проведенных выше испытаний, выполняемое в присутствии заказчика, пользователя или его представителя.
7.2 Проведение испытаний
7.2.1 Общие условия
Желательно ограничить число выполняемых дорогостоящих испытаний, следует проводить только те, которые являются необходимыми.
Это является рекомендацией, поэтому испытания отдельных компонентов в соответствии с 7.3 могут быть ограничены только испытаниями, проводимыми производителем. Специальные испытания, как показано в 7.4, проводят только при указании в контракте.
Если потребитель или его представитель желает провести испытания в своем присутствии, это должно быть указано в заказе.
По предварительному соглашению перед заказом поставщик должен предоставить сертифицированные результаты типовых или контрольных испытаний.
Испытания должны быть выполнены производителем перед отгрузкой, если не указано иное.
7.2.2 Условия заземления
Производитель должен указать приемлемые системы заземления для КП/БМП. Типовые испытания должны подтвердить правильную работу КП/БМП с приемлемыми системами заземления. Они могут включать в себя следующие проверки заземления:
- нейтраль - земля;
- линия - земля;
- нейтраль - земля через высокий импеданс;
- изолированная нейтраль (незаземленная).
Неприемлемые системы должны быть обозначены как:
- запрещенные или
- требующие изменения работы, которое должно быть определено в процессе типовых испытаний.
7.3 Испытания отдельных компонентов
7.3.1 Стандартные испытания для ЭПТ
Таблица 7 - Отдельные испытания
Отдельное устройство | Стандарт |
Трансформатор | МЭК 60146-1-3 (пункт 5) |
Двигатель | МЭК 60034-1, МЭК 60034-2 |
БМП | Настоящий стандарт (таблица 8) |
КП | Настоящий стандарт (таблица 8) |
Примечание 1 - Все испытания для силовых трансформаторов, указанные в МЭК 60076, также следует применять и к трансформаторам КП, если это не противоречит испытаниям, указанным в пункте, приведенном выше. Испытания, указанные в МЭК 60146-1-3 (пункт 5), должны рассматриваться как специальные, применяемые к трансформатору КП. Примечание 2 - Испытание двигателя согласно МЭК 60034 не гарантирует поведение электропривода. Следует также учитывать пульсации и гармонические составляющие, которые поступают в преобразователь. | |
7.3.2 Стандартные испытания для КП/БМП
Таблица 8 - Стандартные испытания для КП/БМП
Испытания | Типовое испытание | Контрольное испытание | Специальное испытание | Обозначение международного стандарта |
Изоляция (см. примечание) | x | x | МЭК 60146-1-1 (пункт 4.2.1) | |
Работа с малой нагрузкой | x | x | МЭК 60146-1-1 (пункт 4.2.2) | |
Номинальный ток | x | МЭК 60146-1-1 (пункт 4.2.3) | ||
Перегрузочная способность | x | МЭК 60146-1-1 (пункт 4.2.12) | ||
Измерение пульсаций напряжения и тока | x | МЭК 60146-1-1 (пункт 4.2.15) | ||
Определение потерь | x | МЭК 60146-1-1 (пункт 4.2.4) | ||
Превышение температуры | x | МЭК 60146-1-1 (пункт 4.2.5) | ||
Измерение коэффициента мощности | x | МЭК 60146-1-1 (пункт 4.2.6) | ||
Измерение внутреннего регулирования напряжения | x | МЭК 60146-1-1 (пункт 4.2.8) | ||
Проверка вспомогательных устройств | x | x | МЭК 60146-1-1 (пункт 4.2.7) | |
Проверка свойств управляющего оборудования | x | x | 7.3.3 | |
Проверка защитных устройств | x | x | МЭК 60146-1-1 (пункт 4.2.10) | |
Защита от электромагнитных полей | x | МЭК 61800-3 (пункт 5) | ||
Электромагнитное излучение | x | МЭК 61800-3 (пункт 6) | ||
Акустический шум | x | МЭК 60146-1-1 (пункт 4.2.14) | ||
Дополнительные испытания | x | МЭК 60146-1-1 (пункт 4.2.16) | ||
Примечание - Если для правильной работы ЭПТ/КП необходимо некоторые компоненты подключить к заземлению, они должны быть отключены в процессе измерения сопротивления изоляции. (Согласование с другими стандартами находится на рассмотрении.) | ||||
7.3.3 Проверка свойств управляющего оборудования КП/БМП
Проверить свойства управляющего оборудования при всех нагрузках, которые могут возникать при его использовании, невозможно. Однако оборудование должно быть проверено с двигателем (предпочтительно имеющим мощность, близкую к номинальной). Если это не может быть выполнено как цеховое испытание (см. 7.1.5), можно использовать двигатель меньшей мощности с соответствующим масштабированием величин обратных связей.
Если указано производителем, контрольное испытание для проверки управляющего оборудования может быть выполнено с ненагруженным двигателем с учетом требуемого диапазона регулирования скорости, т.е. при минимальной и максимальной скоростях. Динамические характеристики должны быть проверены при переходе с одной скорости на другую. Может быть полезно добавление инерционной нагрузки на привод, так чтобы КП/БМП работали при ограничении тока при ускорении (если это предусмотрено). Проверка замедления должна быть совместима с конструкцией оборудования.
Удовлетворительная работа оборудования должна быть проверена для всего диапазона напряжения питания, для которого оно разработано, если эта проверка еще не выполнена в другом испытании (например, при проверке защитных устройств). Для контрольного испытания к КП/БМП подключают номинальное входное напряжение или напряжения, если их несколько. При типовом испытании проверяют также функционирование оборудования при максимальном и минимальном значениях в диапазоне изменения каждого входного напряжения.
7.4 Испытания ЭПТ
Перечень испытаний для ЭПТ приведен в таблице 9.
Это специальные испытания (см. 7.1.4).
Таблица 9 - Классификация специальных испытаний ЭПТ
Оценочные испытания | Номер подпункта |
Малая нагрузка | 7.4.2.1 |
Обычная нагрузка | 7.4.2.2 |
Режим нагружения | 7.4.2.3 |
Допустимый ТМН (ток при максимальной нагрузке) при разных скоростях | 7.4.2.4 |
Превышение температуры | 7.4.2.5 |
КПД | 7.4.2.6 |
Гармонические составляющие тока со стороны подводящей линии | 7.4.2.7 |
Коэффициент мощности ( | 7.4.2.8 |
Перераспределение тока | 7.4.2.9 |
Распределение напряжения | 7.4.2.10 |
Проверка вспомогательных устройств | 7.4.2.11 |
Проверка согласования защитных устройств | 7.4.2.12 |
Проверка свойств при особых условиях эксплуатации | 7.4.2.13 |
Ток на валу/изоляция подшипников | 7.4.2.14 |
Акустический шум | 7.4.2.15 |
Вибрация двигателя | 7.4.2.16 |
Проверка ЭМС | 7.4.2.17 |
Содержание гармоник выходного тока КП | 7.4.2.18 |
Динамические испытания | |
Ограничение тока и контур тока | 7.4.3.1 |
Контур регулирования скорости | 7.4.3.2 |
Пульсации момента вращения | 7.4.3.3 |
Автоматический перезапуск | 7.4.3.4 |
Цепь возбуждения | 7.4.3.5 |
7.4.1 Схема для проведения испытания
Испытание проводят согласно схеме испытаний (см. рисунок 7). На этом рисунке показано, что физические переменные непосредственно измерены или рассчитаны по результатам косвенных измерений.
- напряжение;
- момент вращения;
- ток;
- температура;
- скорость;
- активная мощность
Рисунок 7 - Схема испытаний ЭПТ
7.4.2 Оценочные испытания
7.4.2.1 Малая нагрузка
Вал двигателя присоединяют к нагрузке (см. примечание), которая способна предоставить условия для проверки правильного функционирования системы управления. По согласованию между производителем и потребителем может быть проведено испытание без нагрузки. Двигатель должен быть подобран таким, чтобы его ток мог обеспечить проверку правильного функционирования КП/БМП.
Примечание - Нагрузкой является исполнительное оборудование или для целей испытания - модель исполнительного оборудования.
7.4.2.2 Обычная нагрузка
Вал двигателя присоединяют к нагрузке (см. примечание), которая специально предназначена для обеспечения необходимых среднеквадратичных значений напряжения, тока, и т.д., и включают электропривод при указанных установившихся условиях.
Производитель и потребитель должны подтвердить эту проверку, если она была выполнена при цеховом испытании или при приемо-сдаточных испытаниях.
Примечание - Нагрузкой является исполнительное оборудование или для целей испытания - модель исполнительного оборудования.
7.4.2.3 Режим нагружения
Вал двигателя присоединяют к нагрузке (см. примечание), которая специально предназначена для предоставления согласованной повышенной нагрузки при долгосрочной работе, чтобы проверить повышение температуры оборудования и достижение устойчивых условий в пределах номинальных значений.
Производитель и пользователь должны подтвердить эту проверку, если она была выполнена при цеховых или при приемо-сдаточных испытаниях.
Примечание - Нагрузкой является исполнительное оборудование или, для целей испытания, модель исполнительного оборудования.
7.4.2.4 Допустимый ТМН (ток при максимальной нагрузке) при разных скоростях
Диапазон скоростей, при которых электропривод с преобразователем может работать продолжительно, питаясь номинальным током без превышения тепловой устойчивости какого-либо оборудования, определяют соответствующим измерением установившихся температур при каждой проверяемой скорости.
Двигатель соединяют с нагрузкой. Обеспечивается полная нагрузка или перегрузка.
Примечание - Это испытание является обычным цеховым, но может в определенных случаях быть выполненным в процессе приемо-сдаточных испытаний по согласованию между производителем и заказчиком. При цеховом испытании вал двигателя соединен с нагрузкой. Нагрузка регулируется для обеспечения указанной перегрузки в соответствующих точках в пределах диапазона регулирования скоростей. При приемо-сдаточных испытаниях должна быть указана нагрузка, которая обеспечивает процесс в соответствующих условиях.
7.4.2.4.1 Коммутация двигателя при разных скоростях
Испытание коммутации двигателя при разных скоростях проводят при следующих условиях: при цеховых или приемо-сдаточных испытаниях при основной скорости с перегрузкой, определенной паспортными данными привода для обоих направлений вращения (если необходимо), и при максимальной скорости в условиях перегрузки, определенной паспортными данными привода, для обоих направлений вращения (если необходимо).
По соглашению этот метод может быть заменен динамическим нагружением, позволяющим проводить испытание без статической нагрузки (вал двигателя свободен). Динамические условия определяются ускорением (для вращений вперед и, при необходимости, назад) при максимальном (ограничивающем) токе (соответствует перегрузке ТМН):
- во-первых, от нуля до основной скорости;
- во-вторых, от основной скорости до максимальной скорости;
- и, в-третьих, от максимальной скорости до нуля.
Определение класса коммутации производят в конце ускорения. Классификацию коммутации выполняют визуальным наблюдением согласно таблице 10, приведенной ниже.
Таблица 10 - Классификация коммутации, выполненная визуальным наблюдением
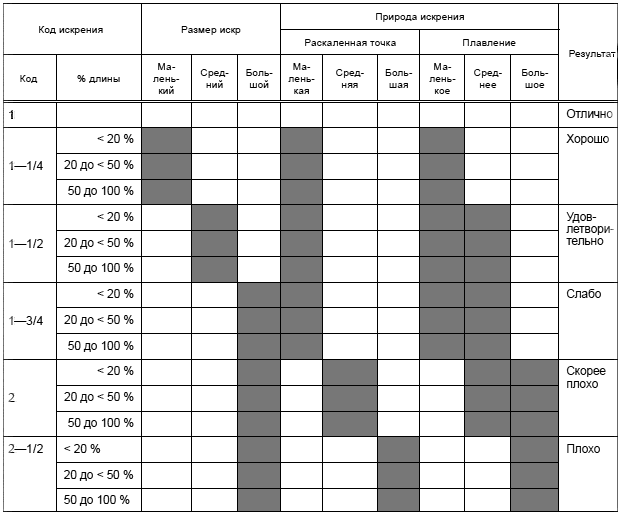
7.4.2.4.2 Превышение температуры двигателя в зависимости от скорости
В данной проверке нет необходимости, если двигатель имеет независимое охлаждение.
В случае использования двигателя с вентилятором, установленным на валу, при низкой скорости и высоком моменте вращения производитель двигателя должен предоставить зависимость допустимого ТМН от скорости.
Примечание - Обмотка возбуждения двигателя с самовентиляцией при низкой скорости может перегреваться даже без нагрузки.
По соглашению между потребителем и производителем привода проверка превышения температуры может быть выполнена с использованием стандартного измерения температуры [см. МЭК 60034-1 (пункты 15 и 16)]. В этом случае скорость должна быть выбрана при 3%, 10% или 30% базовой скорости в зависимости от характера исполнительного оборудования. Проверку считают выполненной, когда нагрузка соответствует допустимой кривой ТМН.
7.4.2.5 Превышение температуры
Проверку превышения температуры выполняют при минимальной, основной и максимальной скоростях с максимально допустимой нагрузкой. Проверку превышения температуры проводят при установившемся значении всех температур.
7.4.2.6 Коэффициент полезного действия (КПД)
Механическую мощность измеряют методом торможения, динамометрическим методом, методом двух машин согласно МЭК 60034-2 (пункт 9.2) или калориметрическим методом. Тогда, общий КПД системы, %, равен
![]() . Если нет возможности точно измерить КПД на выходе ЭПТ, он может быть аппроксимирован расчетами, которые совпадают с соответствующими испытаниями.
. Если нет возможности точно измерить КПД на выходе ЭПТ, он может быть аппроксимирован расчетами, которые совпадают с соответствующими испытаниями.
7.4.2.7 Гармонические составляющие тока со стороны подводящей линии
Измерение проводят контрольно-измерительными приборами и по методикам в соответствии с МЭК 61000-4-7 при номинальных условиях эксплуатации.
7.4.2.8 Коэффициент мощности
Измерение коэффициента мощности должно быть выполнено при номинальных условиях эксплуатации (см. 2.4.10 и 2.4.11). Это измерение может быть выполнено при проведении испытания под нагрузкой (см. 7.4.2.2).
7.4.2.9 Перераспределение тока
Если используют параллельно соединенные устройства в ЭПТ, должно быть проверено перераспределение тока. Это испытание должно быть проведено при номинальном выходном токе.
Примеры параллельной конфигурации:
- преобразователь состоит из более чем одного моста;
- преобразователь состоит из более чем одного полупроводникового вентиля на плечо;
- двигатель имеет обмотки, подключенные параллельно.
Баланс должен быть достаточным, чтобы убедиться, что устройство не перегружено выше проектных значений при наихудших условиях.
7.4.2.10 Распределение напряжения
Если два или более БМП и/или двигателя подключают последовательно, должно быть проверено распределение напряжения, так чтобы не возникало перенапряжения на БМП и/или двигателях. Распределение напряжения должно быть проверено при наихудших условиях, чтобы убедиться, что устройство не перегружено выше проектных значений.
7.4.2.11 Проверка вспомогательных устройств
Должна быть проведена проверка функционирования всех вспомогательных устройств, которые не полностью проверены в испытаниях КП/БМП или двигателя. Примерами таких устройств являются: двигатели вентиляторов, запитанные от КП масляные насосы, внешние автоматические выключатели и автоматические выключатели постоянного тока.
Эта проверка, если удобно, может быть выполнена при проведении испытания с неполной нагрузкой (см. 7.4.2.1).
7.4.2.12 Проверка согласования защитных устройств
Проверку согласования защитных устройств следует проводить по возможности без перегрузки компонентов оборудования выше их номинальных значений.
Функция аварийного останова, если она имеется, должна быть проверена. Должна быть также проверена правильная работа всех защитных устройств, которые не полностью проверены при испытаниях КП/БМП или двигателя.
Из-за широкого выбора защитных устройств и их сочетаний невозможно сформулировать какие-либо общие правила для проверки этих устройств.
Примерами защитных устройств, которые проверяются в процессе испытания ЭПТ, являются устройства контроля: превышения частоты вращения двигателя, перенапряжения, перегрузки, потери обратной связи по скорости, понижения основного напряжения, замыкания на землю, и т.д.
Чтобы проверить функции защиты и не превысить нагрузки на компоненты системы, рекомендуется использовать щадящие настройки.
Если преобразователь имеет защиту от замыкания на землю, проверка нормальной работы защиты выполняется на клеммах двигателя.
7.4.2.13 Проверка свойств при особых условиях эксплуатации
Нестандартные климатические условия могут требовать специального покрытия на электронных узлах и/или шкафах. В экстремальных температурных условиях может быть установлен кондиционер или обогреватель. Особые условия должны быть указаны потребителем, а способы корректных измерений и испытаний оборудования должны быть согласованы между производителем и потребителем.
7.4.2.14 Токи на валу и изоляция подшипника
Токи на валу могут быть результатом пульсаций напряжения и тока, наложенных на значения постоянного тока в процессе работы преобразователя. Несмотря на то, что эти токи малы, они могут стать причиной повреждения как смазки, так и подшипников скольжения. Методы для проверки их наличия должны быть согласованы между производителем и потребителем оборудования.
7.4.2.15 Акустический шум
Для ЭПТ может быть необходима проверка на акустический шум. Испытание должно быть выполнено при увеличенном диапазоне рабочей скорости и нагрузок (см. примечание). Допустимые уровни шума должны быть согласованы между производителем и потребителем. См. также МЭК 60034-9.
Примечание - Нагрузкой является исполнительное оборудованием или для целей испытания - модель исполнительного оборудования.
7.4.2.16 Вибрация двигателя
Проверку проводят при различных скоростях и нагрузках для определения влияния преобразователя на вибрацию двигателя.
7.4.2.17 Проверка ЭМС
Проверки ЭМС приведены в МЭК 61800-3.
7.4.2.18 Содержание гармоник выходного тока КП
Гармонические составляющие выражаются через ток. Пульсацию следует оценивать как двойную амплитуду в амперах.
Условия измерения должны быть согласованы между потребителем и производителем:
- напряжение двигателя при выбранной скорости;
- значительная нагрузка (между 50% ТМН и 100% ТМН).
7.4.3 Динамические испытания
7.4.3.1 Ограничение тока и контура тока
Испытания характеризуются динамическими характеристиками КП или ЭПТ независимо от исполнительного оборудования.
Могут быть проверены:
a) ограничение тока.
Обеспечивается поэтапное увеличение нагрузки, чтобы достичь требуемой заданной точки ограничения тока КП. (В качестве альтернативы можно использовать поэтапное ступенчатое изменение скорости двигателя с соответствующим моментом инерции на валу, что эквивалентно приложению кратковременной нагрузка КП для достижения заданной точки ограничения тока). Затем могут быть проанализированы время нарастания тока, его перерегулирование и характеристики демпфирования;
b) полоса пропускания контура тока.
Полоса пропускания контура тока может быть установлена использованием гармонического анализа зависимости между заданным значением тока и измеренным (обратная связь). Проверяются амплитуда и сдвиг по фазе. Испытание должно быть проведено на линейном или квазилинейном участке;
c) переходная характеристика по заданию тока.
Испытания могут включать в себя нелинейный участок.
Испытания должны быть проведены при различных скоростях - при 0%-ной, 5%-ной основной скорости, 100%-ной основной скорости и максимальной скорости ослабления поля .
Примечание - Как правило, необходимо регулировать скорость, используя при испытании машину, соединенную с валом приводной системы (в которой момент автоматически приводится в соответствии со значением тока).
7.4.3.2 Контур регулирования скорости
Для проведения испытания выбирается требуемая величина и производится скачок задания скорости. Испытание может быть выполнено при отсутствии нагрузки или с небольшой нагрузкой:
- достигается и проверяется значение ограничения тока;
- измеряется реакция скорости привода на скачок задания без достижения каких-либо ограничений (как правило, измерения выполняются при 50%-ной основной скорости, при 100%-ной и при максимальной скорости с ослаблением поля NM. Временная характеристика реакции скорости на ступенчатое задание приведена в приложении D.
При измерении реакции скорости на ступенчатое изменение нагрузки последнюю следует изменять с шагом, позволяющим последовательно измерять скорость. Это может быть выполнено при проведении испытания 7.4.2.2 (испытание под обычной нагрузкой). Шаг нагрузки должен быть выбран так, чтобы не достигались ограничения.
Измерение проводят согласно описанию, приведенному в приложении D.
7.4.3.3 Пульсации момента вращения
Относительный уровень пульсаций момента в воздушном зазоре может быть измерен без нагрузки путем изменения частоты вращения с помощью соответствующего соединенного с валом средства измерения скорости. Точное измерение пульсаций момента возможно при хорошо известном моменте инерции механической части привода или с помощью датчиков крутящего момента.
Примечание - Пульсации момента вращения могут быть оценены по форме кривой тока якоря для электропривода с постоянным потоком возбуждения.
7.4.3.4 Автоматический перезапуск
Если обеспечивается автоматический перезапуск, он должен быть проверен при указанном интервале отключения электроэнергии. Эта функция должна быть согласована с аварийным остановом и, при необходимости, заблокирована.
7.4.3.5 Цепь возбуждения
Регулирование напряжения постоянного тока: это испытание применимо только для приводов с управлением по цепи возбуждения, что особенно важно для двигателей с расширенным диапазоном скоростей за счет ослабления поля.
Напряжение на выводах двигателя или ЭДС должно быть измерено соответствующим регистрирующим прибором во всем диапазоне скоростей при увеличении частоты вращения от минимальной до максимальной рабочей. Динамическое испытание также должно быть проведено при увеличенной частоте вращения двигателя, и она должна снижаться, следуя наибольшей скорости разгона. Необходимо убедиться, что зарегистрированные значения находятся в пределах указанного диапазона.
8 Информация об изделии
8.1 Маркировка
На паспортной табличке данных КП или БМП должна быть указана следующая информация.
а) идентификационный признак производителя;
b) идентификационный признак оборудования (модель, серийный номер и год изготовления);
c) входные параметры:
- напряжение;
- номинальный ток со стороны подводящей линии или номинальный входной ток преобразователя
и входной ток вспомогательных устройств
в соответствии с конструкцией КП или БМП, чтобы эти значения могли быть использованы для определения параметров питания,
- частота,
- число фаз,
- минимальное внутреннее сопротивление источника или максимальный ожидаемый ток короткого замыкания и максимальное внутреннее сопротивление источника;
d) выходные параметры:
- максимальное номинальное выходное напряжение,
- номинальный постоянный ток,
- перегрузочная способность (см. 5.2.2),
- номинальная мощность (опционально);
е) выходные параметры источника питания цепи возбуждения:
- номинальное выходное напряжение,
- номинальный выходной ток.
Примечание - В случае ограниченных размеров изделия некоторые из этих данных предоставляются в документации на изделие.
8.2 Сопроводительная информация об ЭПТ или КП/БМП
8.2.1 Вместе с оборудованием должны быть предоставлены:
- информация, необходимая для калибровки компонентов, устройств и сборочных единиц, которые предусматривают пользовательскую настройку;
- информация, позволяющая правильно выбирать входную и выходную защиту и заземление;
- руководства по эксплуатации, включая всю информацию, необходимую для работы поставляемого оборудования;
- информация о ЭМС согласно МЭК 61800-3;
- предупреждающие надписи с требованиями безопасности;
- информация о входном чередовании фаз и выходной полярности.
8.2.2 Должна быть предоставлена следующая сопроводительная информация:
- инструкции по обслуживанию и эксплуатации, включая информацию о расположении и замене вышедших из строя компонентов или сборочных единиц; язык изложения должен соответствовать стране производителя оборудования или быть согласован между поставщиком/производителем и заказчиком;
- номинальное значение энергии, рассеиваемой цепями динамического торможения и замедления.
8.2.3 Вместе с ЭПТ должна быть предоставлена информация о частоте вращения, включающая:
- основную частоту вращения;
- максимальную частоту вращения;
- безопасную максимальную частоту вращения;
- ток возбуждения при основной и максимальной частотах вращения.
9 Безопасность и предупредительные надписи
9.1 Предупредительные надписи
Предупредительные знаки и надписи должны быть предоставлены производителем и расположены в соответствии с требованиями норм и стандартов на месте использования оборудования (если оно известно) и согласно МЭК 60204-1. Они должны быть на соответствующем месту использования языке(ах).
Если неизвестно местоположение потребителя, предупредительные надписи должны быть предоставлены и расположены в соответствии с действующими нормами и стандартами страны происхождения и МЭК 60204-1. Они должны быть на языке страны производителя оборудования.
Все предупредительные знаки и надписи должны быть продублированы в руководстве по эксплуатации.
Примечание - Некоторые принципиальные указания:
- предупредительная надпись должна находиться возле рукоятки управления главного выключателя питания, если он не обесточивает все открытые токоведущие части, находясь в положении "ВЫКЛ.";
- там, где есть возможность перепутать подводящую линию с линией после отключающего устройства из-за его размера или расположения, предупредительная надпись должна прилегать к рукоятке управления отключающего устройства цепи управления, указывая на то, что не отключает все питание от оборудования;
- если время, необходимое для рассасывания накопленного потенциала 50 В, составляет более 1 мин, должно быть обеспечено предупреждающее сообщение;
- если часть оборудования, имеющая напряжение свыше 50 В, может быть перемещена вне объема, закрытого оболочкой, устройство должно включать защиту цепей свыше 50 В, за исключением тех, в которых ток короткого замыкания для этих напряжений ограничен 5 мА;
- необходимо размещать предупредительные надписи в случаях, когда потребитель может разместить в оболочке цепи, которые не отключаются поставляемыми производителем устройствами;
- на предупредительной табличке должна быть указана информация о части оборудования, составляющего цепи сверхнизкого напряжения (сверхнизкое напряжение по функциональным признакам определяется согласно МЭК 60364-4-41).
9.2 Безопасность и устройство ЭПТ
ЭПТ соединяется с исполнительным оборудованием, которое должно соответствовать правилам и нормам техники безопасности. Все системы защиты для исполнительного оборудования, включая вал двигателя, определяет потребитель. Потребитель должен предоставить производителю ЭПТ все технические требования, которые необходимы для обеспечения безопасности и должны быть включены в систему управления ЭПТ (см. приложение Е).
ЭПТ содержит в основном электрическое оборудование, поэтому угроза безопасности определяется главным образом электрическими факторами. Аналогичная угроза безопасности существует и для КП/БМП.
По этим причинам ЭПТ должен удовлетворять требованиям МЭК 60204-1.
Следование настоящему стандарту не обеспечивает выполнение всех требований безопасности. Более подробные требования представлены в других стандартах (см. приложение Е).
Приложение А
(справочное)
Двигатели
А.1 Общая информация
Все КП/БМП, охватываемые настоящим стандартом, предназначены для использования с двигателями постоянного тока (одним или более).
Задача приложения - помочь потребителю правильно выбрать двигатель и познакомить его с возможным влиянием преобразователя на работу двигателя.
Конструкция двигателя может иметь любое исполнение (каплезащищенное открытое исполнение, герметичное, взрывобезопасное, и т.д.).
Перечень стандартов для электродвигателей постоянного тока приведен в МЭК 60034.
А.2 Анализ охлаждения
В основном существует три основных метода охлаждения двигателя. Они кодируются в МЭК 60034-6 и определяются как код IС. Код состоит из пяти знаков, которые определяют:
- первая цифра - компоновку схемы (от 0 до 9):
свободная циркуляция | 0, |
использование труб | 1, 2, 3, |
использование теплообмена (включая корпус двигателя) | 4, 5, 6, 7, 8, 9; |
- вторая цифра - теплоноситель первого контура, наиболее часто используемый воздух А и вода W;
- третья цифра - способ движения первичного теплоносителя:
естественная конвекция | 0, |
самоциркуляция | 1, |
независимый охладитель, устанавливаемый на двигателе, | 6; |
- четвертая цифра - вторичный теплоноситель с таким же индексированием, как для первичного;
- пятая цифра - метод движения вторичного теплоносителя с таким же индексированием, как для метода движения первичного теплоносителя.
Три основных метода охлаждения двигателя закодированы, как указано ниже:
a) вентиляторы, устанавливаемые на валу.
Охлаждение является в этом случае функцией скорости двигателя, метод также называется самовентиляция с помощью встроенного вентилятора.
Этот метод кодируется IC0A1;
b) отдельная подача охлаждения (часто поставляется с фильтрами):
- подача воздуха от нагнетателя, непосредственно установленного на двигателе IC0A6,
- подача воздуха по отдельной магистрали IC1A7.
При пониженных скоростях вентилятор, установленный на валу двигателя, может из-за уменьшения эффективности внутренней циркуляции воздуха оказаться недостаточным для поддержания заданного температурного режима.
Это является основной проблемой при нагрузках, которые требуют около 1 о.е. момента вращения при скоростях ниже приблизительно 0,5 о.е. Нагрузки, которые требуют сниженных моментов вращения ниже этой скорости, редко создают проблему (например, вентиляторы радиального типа и насосы).
_______________
о.е. - относительная единица.
Максимально допустимая температура изоляции обмотки и корпуса двигателя (взрывозащищенного), как правило, ограничивает диапазон скоростей привода с регулированием частоты вращения.
Превышение температуры зависит:
- от желаемого диапазона частот вращения;
- от зависимости момента нагрузки от скорости;
- от типа нагрузки двигателя (статической/динамической);
- от типа корпуса двигателя;
- от выбранного размера корпуса двигателя;
- от системы охлаждения двигателя.
Все вышеперечисленное будет определять эффективность вентиляторного охлаждения двигателя.
А.3 Анализ формы гармонических составляющих
Гармонические составляющие напряжения/тока создают нежелательные нагрев и моменты вращения двигателя (тормозные и колебательные), осевые силы и дополнительный акустический шум.
Гармонические составляющие зависят:
- от минимальной рабочей скорости;
- от величины и порядка производимых гармоник;
- от подключенного исполнительного оборудования;
- от параметров двигателя.
В основном это относительно высокочастотные явления, которые имеют незначительное влияние на двигатели постоянного тока.
А.3.1 Топология преобразователя
Все преобразователи, к которым применяются стандарты, указанные в приложении F, содержат гармоники выходного тока и напряжения. Их гармоническое распределение и значение зависят от типа преобразователя и параметров двигателя. Табличка с паспортными данными двигателя должна содержать сведения о допустимом типе преобразователя.
Двигатель следует использовать с допустимым типом преобразователя во избежание проблем с отказом двигателя (см. рисунок F.1).
А.3.2 Потенциалы относительно земли
Гармоники выходного напряжения и напряжение относительно земли оказывают на системы изоляции двигателя влияние, которое характеризуется следующими параметрами:
- пиковое напряжение между выводами;
- скорость изменения напряжения ![]() ;
;
- напряжение выводов относительно корпуса/земли.
А.4 Крутильные колебания
Двигатели, рассчитанные для использования при постоянной скорости, могут иметь механические резонансы, которые будут возникать при скоростях, отличных от номинальных.
Должна быть проверена вибрация двигателя на других частотах вращения, чтобы обеспечить бесперебойную работу во всем диапазоне частот (см. D.5.3.1, D.5.3.2 и рисунки D.9 и D.10).
А.4.1 Анализ крутильных колебаний
Существование условий, приведенных выше, может быть определено, если необходимо, всесторонним анализом кручения.
А.4.2 Средства для борьбы с крутильными колебаниями
Целью анализа кручения является определение уровня нагрузки на механические части и обеспечение их нахождения в пределах, не превышающих допустимые колебательные нагрузки и предел текучести.
Если анализ показывает, что механическая система перенапряжена, существует несколько средств, которые могут быть использованы при проектировании системы.
Эти средства включают в себя:
- изменение материала или размеров вала, чтобы сместить резонансные частоты за рабочий диапазон;
- использование энергии поглощающих соединений;
- использование многофазных преобразователей для снижения пульсаций момента вращения;
- селективное электронное демпфирование.
А.4.3 Пульсации момента вращения
Знание относительного содержания гармоник напряжений и/или токов двигателя является также важным для определения повторяющихся пульсирующих моментов вращения, вызываемых гармониками.
Следует отметить, что данные пульсации момента вращения происходят при относительно высоких частотах (гармоники несущей частоты). Они хорошо фильтруются самим механизмом. Влияния могут происходить в основном с однофазными преобразователями.
А.5 Режимы функционирования
Система электропривода может быть спроектирована для одного или более режимов работы, приведенных ниже:
a) регулируемый в функции скорости момент вращения, например в функции квадрата скорости (для насосов, вентиляторов и компрессоров);
b) постоянный момент во всем диапазоне частот вращения;
c) постоянная мощность выше определенного диапазона моментов вращения, при этом момент вращения снижается при увеличении скорости;
d) рекуперация, при которой электропривод преобразует механическую мощность вращения вала двигателя в электрическую и возвращает ее в систему питания; рекуперация может происходить в любом из трех режимов, определенных выше - переменный или постоянный момент вращения и постоянная мощность;
e) динамическое торможение, при котором электропривод преобразует мощность вращения вала двигателя в электрическую мощность и рассеивает ее на резисторе или схожем элементе, который рассеивает тепло.
Режимы работы, указанные для системы электропривода, должны быть совместимы с возможностью двигателя работать в требуемых диапазонах момента и скорости вращения (см. рисунок А.1).
А.5.1 Механические характеристики
Механические характеристики (момент/скорость вращения) могут быть определены для системы электропривода, например, как показано на рисунке А.1.
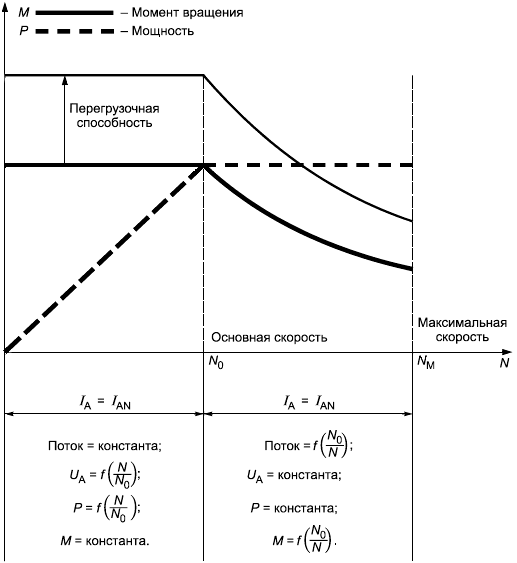
0
Рисунок А.1 - Момент вращения и выходная мощность двигателя постоянного тока
Примечание 1 - Снижение перегрузочной способности может быть необходимо для диапазона скоростей выше основной скорости.
Примечание 2 - Работа ниже основной скорости может потребовать использования нагнетателя для правильного охлаждения двигателя.
Примечание 3 - Этот рисунок может быть расширен до четырех рабочих квадрантов.
Примечание 4 - Снижение нагрузочной способности может быть необходимо для работы выше основной скорости.
Для приводов с самоохлаждением, питающимся от КП/БМП, допустимый момент снижается с ухудшением вентиляции при уменьшении скорости.
А.5.2 Рекуперация энергии
Некоторые регулируемые электроприводы согласно настоящему стандарту могут работать продолжительно в режиме рекуперации, при которой двигатель преобразует механическую энергию от исполнительного оборудования в электрическую, а последняя посредством КП/БМП возвращается в сеть питания переменного тока.
Механическая мощность двигателя определяется моментом вращения и угловой скоростью. Эти переменные в общем случае имеют два направления каждая. Поэтому возможны четыре режима работы (см. 2.3). Мощность является произведением момента вращения и угловой скорости.
Режим передачи мощности от преобразователя к двигателю называется двигательным, тогда как режим передачи от двигателя к преобразователю называется генераторным.
Как правило, табличка с техническими параметрами двигателя указывает номинальное напряжение, соответствующее двигательному режиму работы. Может оказаться необходимым снизить это значение в режиме рекуперации, чтобы избежать отказа инвертора.
А.6 Акустический шум
Двигатели постоянного тока, питающиеся от выпрямителей, производят характерный шум, имеющий характер "гудения", который возникает от присущих такому источнику питания пульсаций напряжения.
Пульсации напряжения производятся соответствующими пульсациями тока в цепи якоря двигателя, которые, взаимодействуя с полем двигателя, создают периодические силы, вызывающие вибрацию различных частей конструкции двигателя.
Пульсации токов называются гармоническими токами, их значение и число зависят от нескольких факторов: числа фаз питания, индуктивности цепи обмотки якоря и угла проводимости тиристоров.
Шум, который вызван гармоническими силами, не должен превышать конкретные допустимые пределы. Он может вызывать раздражающий эффект из-за присутствия высокого тона, особенно в случае использования дросселей постоянного тока.
А.7 Срок службы системы изоляции двигателя
При питании от преобразователя система изоляции двигателя подвергается более высоким нагрузкам, чем при питании непосредственно от сети постоянного тока.
Если в цепи питания двигателя используется прерыватель с высокой скоростью изменения напряжения в течение периода переключения, перегрузкам подвергается основная изоляция.
Скорость изменения напряжения ![]() нагружает межвитковую изоляцию, в частности, при питании от широтно-импульсных преобразователей.
нагружает межвитковую изоляцию, в частности, при питании от широтно-импульсных преобразователей.
Практический опыт свидетельствует о том, что вышеупомянутые факторы не обязательно влияют на срок службы изоляции. Широко известно, что не происходит значительного снижения срока службы изоляции от работы преобразователя, если соблюдаются следующие условия:
![]() (номинальное напряжение);
(номинальное напряжение);
![]() 500 В/мкс.
500 В/мкс.
А.8 Напряжения на валу
В результате работы двигателя от преобразователя на валу двигателя могут возникнуть напряжения.
Опыт показывает, что напряжения на валу выше, чем 500 мВ (пик), могут вызвать необходимость изоляции подшипников.
Так как двигатели практически никогда не оборудованы изолированными подшипниками, желательно выполнять измерения напряжения на валу в режиме питания от преобразователя. Методы коррекции включают в себя токовую развязку с использованием заземленных щеток на валу или применение изолированных подшипников.
А.9 Новые системы привода
При внедрении новой системы электропривода от производителя может потребоваться технико-экономическое обоснование. Пользователь при этом указывает следующие данные:
- механические характеристики и параметры механической части электропривода (зависимости между моментом вращения и скоростью, момент инерции, упругости, зазоры);
- необходимый диапазон изменения скорости;
- напряжение питания с допусками (напряжение/частота);
- доступная длительная мощность и мощность короткого замыкания;
- режим работы (непрерывный, кратковременный, циклический);
- особые технические условия на места установки;
- гармоники в системе питания переменного тока, выбросы напряжения при переключении.
Примечание - См. D.3 для дополнительной информации.
А.10 Ссылочные документы
МЭК 60034 Вращающиеся электрические машины
МЭК 60034-5:1991 Вращающиеся электрические машины. Часть 5. Классификация степеней защиты, которые обеспечиваются корпусами вращающихся электрических машин (IP код)
МЭК 60034-6:1991 Вращающиеся электрические машины. Часть 6. Метод охлаждения (IС код)
МЭК 60034-7:1992 Вращающиеся электрические машины. Часть 7. Классификация типов конструкций и способов монтажа (IM код)
МЭК 60079 Электрооборудование для взрывоопасных газовых сред
Приложение В
(справочное)
Подключение к сети
В.1 Введение
Подключение КП/БМП к сети питания оказывает в точке подключения воздействие, которое отражается далее на питающей сети. Другие нагрузки производят похожее влияние в общих точках соединения (ОТС). В дополнение преобразователь представляет собой нелинейный тип нагрузки, для примера форма сигнала напряжения и тока в питающей линии несхожи.
Подключение преобразователя приводит к искажению формы сигнала напряжения питающей линии. Это является дополнением к любым искажениям формы сигнала в ОТС, существующим перед подключением преобразователя из-за использования других подключенных нагрузок в сети.
Преобразователь как нелинейный тип нагрузки означает, что в дополнение к полезному синусоидальному току в преобразователе протекают гармонические токи. Поскольку эти гармонические токи не участвуют в передаче энергии и вносят бесполезную нагрузку в систему электроснабжения, желательна их минимизация. IEEE 519 подробно рассматривает влияние гармонических токов и устанавливает допустимые пределы их влияния. Потребитель должен указать степень необходимого уровня гармоник.
Преобразователи также способны к генерированию напряжения, переходящего на линии питания переменного тока, приводящего к провалам напряжения питания. Данные провалы описаны в IEEE 597. Допустимые пределы для провалов и методы их снижения приведены в IEEE 519 и МЭК 60146-1-1. Поскольку влияние провалов зависит от конфигурации и входной мощности преобразователя, пользователь должен рассматривать этот факт при применении преобразователей. Производитель преобразователя может быть ознакомлен с этими данными для выбора преобразователя и методов снижения провалов.
Наконец, весьма высокая частота переключения полупроводников преобразователя на стороне подводящей линии приводит к появлению высокочастотных переходных процессов в линии, что может вызвать проблемы ЭМС.
Влияние преобразователя на энергосистему и оборудование в ОТС описывается в МЭК 61800-3 (приложения В и С).
В.2 Заземление источника питания переменного тока
Заземлению источника питания переменного тока уделяется большое внимание. Для трехфазных систем питания переменного тока существует пять вариантов заземления: с изолированной нейтралью, глухозаземленной нейтралью, с заземленным линейным проводником, заземленной нейтралью низкого сопротивления, заземленной нейтралью высокого сопротивления. Система с заземленной нейтралью высокого сопротивления является предпочтительной для приводов, используемых в процессах, в которых необходимо непрерывное питание. Например, линия с заземляющим проводником или линия с соединенными в треугольник обмотками трансформатора с заземленной нулевой точкой может вызвать неправильную работу привода, причиной которой является напряжение регулятора с общим подключением на землю. Руководство по эксплуатации производителя должно содержать указания по допустимым конфигурациям заземления систем питания переменного тока. IEEE 597 (раздел 12) содержит более детальное рассмотрение методов заземления. В IEEE 597 (раздел 12, таблица 6) характеристики типов систем заземления систематизируются по трем основным категориям: глухозаземленная нейтраль, заземленная нейтраль высокого сопротивления и изолированная нейтраль.
Примечание - Способы заземления в электросети и способы заземления оборудования рассматривается в МЭК 60364-3.
В.3 Общие сведения о сетевых и внутренних гармониках
Теоретический и практический анализ преобразователей позволяет их рассматривать как источники гармонических токов.
Примечание 1 - Некоторые новые преобразователи могут рассматриваться как источники гармонических напряжений. Поэтому подключение к ТС через сопротивление преобразует их в источники гармонических токов.
Примечание 2 - ОТС: общая точка соединения к коммунальной сети; ТСУ: общая точка соединения установки к локальной сети; ТС: точка соединения (для любого из случаев, приведенных выше).
Расчетным способом можно определить гармонический импеданс системы в точке соединения ТС.
Это значение может использоваться для уточнения гармонической модели системы электропривода (ЭПТ). Гармонические помехи, влияющие на оборудование, являются результатом влияния гармонического напряжения.
![]() .
.
Затем определяется влияние гармоник (или промежуточных гармоник, когда порядок является нецелым числом).
Существует два основных типа преобразователей с точки зрения их подключения к линии переменного тока:
- тип 1: тиристорные преобразователи с большой индуктивностью цепи нагрузки постоянного тока, в которых гармоники тока, определяемые его пульсациями (см. рисунок В.4), зависят от числа пульсаций (пульсности) преобразователя и угла зажигания при соответствующем значении . Гармоники напряжения обязаны в основном коэффициенту
и пульсности преобразователя, как показано в таблице В.1;
- тип 2: диодные преобразователи с небольшой индуктивностью (или вообще без индуктивности) и большой емкостью нагрузки постоянного тока, в которых гармоники тока являются функцией индуктивности питающей линии (см. рисунок В.5).
Таблица В.1 - Минимальные требования для низковольтных систем
|
|
|
|
| ||||||||
|
|
|
| |||||||||
0,01 | 231 | 0,25 | 0,0041 | 150 | 0,19 | 0,0043 | 106 | 0,18 | 0,0055 | 99 | 0,14 | 0,0054 |
0,015 | 154 | 0,40 | 0,0062 | 100 | 0,29 | 0,0065 | 71 | 0,27 | 0,0081 | 66 | 0,22 | 0,0081 |
0,03 | 77 | 0,74 | 0,0123 | 50 | 0,57 | 0,0130 | 35 | 0,55 | 0,0165 | 33 | 0,43 | 0,0163 |
0,05 | 46 | 1,24 | 0,0206 | 30 | 0,93 | 0,0217 | 21 | 0,91 | 0,0275 | 20 | 0,72 | 0,0268 |
0,08 | 29 | 1,98 | 0,0327 | 19 | 1,51 | 0,0342 | 13 | 1,47 | 0,0444 | 12 | 1,19 | 0,0447 |
0,1 | 23 | 2,48 | 0,0409 | 15 | 1,89 | 0,0428 | 10 | 1,84 | 0,0555 | 9 | 1,49 | 0,0559 |
Примечание 1 - Для систем среднего напряжения используется Примечание 2 - Для высоковольтных систем используется Примечание 3 - Не используется для систем с непосредственно присоединенными батареями конденсаторов или фильтрами. Примечание 4 - Допущение: Примечание 5 - Полный коэффициент гармонических искажений отражает вклад преобразователя в существующие искажения. Примечание 6 - Участок провала приведен для одного единичного провала без многократных переключений. Примечание 7 - | ||||||||||||
Пример расчета влияния гармоник (гармонического напряжения) приведен в 3.6.3 МЭК 60146-1-2.
Данный пример иллюстрирует преобразователи типа 1, подключенные к сети без конденсаторных батарей и длинных линий питания (кабелей). В таблице В.1 приведены минимально необходимые значения для данного полного коэффициента гармонически
, о.е.
искажений напряжения
, при различном числе пульсаций
, ширине участка провала
(выраженной в о.е.
град.) и значении амплитуды основной гармоники напряжения (выраженной в о.е.).
Необходимо также отметить, что:
- при питании группы электроприводов маловероятно совпадение промежуточных гармоник, поэтому полный коэффициент гармонических искажений получается в результате арифметического суммирования;
- с другой стороны, для гармоник, не синхронизированных ЭПТ с контроллерным управлением преобразователями, обычно используется квадратичное суммирование;
- в электроприводах с неуправляемыми выпрямителями на входе гармоники суммируются арифметически.
Угол сдвига тока, потребляемого преобразователем, по отношению к напряжению питания определяется углом начала коммутации и порядком гармоники. Гармонические токи, генерируемые различными преобразователями, подключенными к одной и той же секции питающей линии, суммируются векторно. Сложение гармоник не вызывает принципиальных трудностей, однако их строгий расчет не имеет практического смысла из-за статистического характера генерируемого гармонического тока, в противном случае требуется чрезвычайно большое количество дополнительных данных.
Для преобразователей в режиме источников напряжения с входными выпрямителями рекомендуется простой традиционный метод оценки с помощью суммирования, заключающийся в составлении отдельной расчетной схемы для каждого генератора гармоник, определении контурных токов и узловых потенциалов, вызванных соответствующим генератором гармоник, а затем их арифметическим сложением. Для увеличения точности оценки могут быть использованы коэффициенты одновременности работы преобразователей, если эти данные доступны. Более детальная информация представлена в МЭК 61800-3 (приложение В.2).
Потребителю следует периодически выполнять измерения гармоник в выбранных точках с высоким уровнем гармонического искажения, чтобы определить поведение системы и убедиться:
- в отсутствии перегрузки конденсаторов, фильтров, кабелей и трансформаторов избыточным влиянием гармоник;
- что нет явлений последовательного или параллельного резонанса;
- что уровень гармоник в выбранных точках соединения находится в допустимых пределах.
Для проверки результатов измерений и экстраполяции этих результатов на вновь устанавливаемые или предполагаемые к установке новые преобразователи рекомендуется выполнить анализ гармоник, основанный на коэффициентах одновременности нагрузки преобразователя. Основательный и громоздкий анализ гармоник проводить не рекомендуется.
В.4 Результаты для типичных преобразователей; фазовое управление
Преобразователь мощности может быть представлен как генератор гармонических токов в электрической сети. Порядок гармоник является функцией числа пульсаций преобразователя, т.е. 6 или 12 в большинстве случаев. Порядок гармоник составляет ![]() (
( - целое число,
- число пульсаций преобразователя). Таблица В.2 иллюстрирует идеальный случай гармонического распределения для 6-импульсных преобразователей, когда постоянный ток не имеет пульсаций.
Таблица В.2 - Гармоники тока в 6-пульсном преобразователе
Порядок гармоники | Гармонический состав тока в процентах от основной гармоники тока | |||
|
|
|
| |
5 (примечание 2) | 20,0 | 18,7 | 19,6 | 19,8 |
7 (примечание 2) | 14,3 | 12,4 | 13,7 | 14,1 |
11 | 9,1 | 6,4 | 8,2 | 8,7 |
13 | 7,7 | 4,6 | 6,6 | 7,3 |
17 (примечание 2) | 5,9 | 2,3 | 4,5 | 5,3 |
19 (примечание 2) | 5,3 | 1,5 | 3,8 | 4,6 |
23 | 4,3 | 0,6 | 2,7 | 3,6 |
25 | 4,0 | 0,5 | 2,2 | 3,2 |
29 (примечание 2) | 3,4 | 0,6 | 1,5 | 2,5 |
31 (примечание 2) | 3,2 | 0,7 | 1,2 | 2,3 |
35 | 2,9 | 0,6 | 0,7 | 2,3 |
37 | 2,7 | 0,5 | 0,5 | 1,6 |
41 (примечание 2) | 2,4 | 0,4 | 0,2 | 1,3 |
43 (примечание 2) | 2,3 | 0,3 | 0,1 | 1,1 |
47 | 2,1 | 0,1 | 0,1 | 0,9 |
49 | 2,0 | 0,1 | 0,2 | 0,7 |
Примечание 1 - Примечание 2 - Значение этих гармонических токов в 12-импульсных преобразователях, как правило, составляет 10% значений в 6-импульсных. | ||||
Значение гармонического тока является функцией величины его основной гармоники, реактивного сопротивления коммутации , угла задержки преобразователя и может быть точно рассчитано. В общем случае амплитуда гармоник увеличивается при снижении отношения постоянного тока к переменному (угол коммутации достигает 90°) и снижении индуктивного сопротивления коммутации.
Для трехфазной мостовой схемы преобразователя, представленной на рисунке В.1, приближенный расчет гармонических токов приведен ниже.
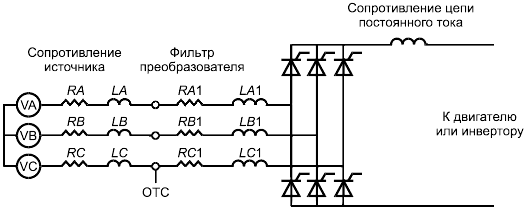
Рисунок В.1 - Тиристорный преобразователь с большой индуктивностью в цепи постоянного тока
В.4.1 Прямоугольный ток питания
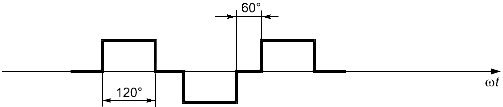
Рисунок В.2 - Прямоугольный ток питания
В.4.2 Трапециевидный ток питания
Расчеты проводят в соответствии с МЭК 60146-1-2, МЭК 61000-2-1.
а) В первом приближении можно пользоваться МЭК 60146-1-2, подпункт 3.6.2.1.
Для обычного сопротивления питающей сети (результат не зависит от ):
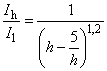 .
.
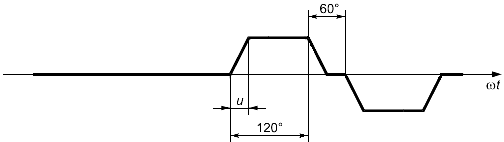
Рисунок В.3 - Трапециевидный ток питания
b) Альтернативный метод аппроксимации (результат не зависит от угла отпирания, но зависит от )
 ,
,
где угол коммутации вычисляют по формуле
![]() ,
,
пользуясь которой следует учитывать, что ![]() ,
, ![]() ,
, ![]() , где
, где - соотношение между максимальным и номинальным током.
с) Окончательную оценку проводят в соответствии с МЭК 60146-1-2 (см. пункт 3.6.4), по математической формуле, с графическим представлением. Результат зависит от угла включения и угла коммутации
.
Таблица В.2 основывается на данной оценке.
В.4.3 Гармоники тока с пульсациями постоянного тока
Три предшествующие аппроксимации предполагают отсутствие пульсаций в звене постоянного тока. Это не всегда соблюдается, в частности в приводах с диодными выпрямителями без реактора.
В.4.3.1 Прямоугольная форма тока питания с идеализированными пульсациями постоянного тока
Идеализированные пульсации постоянного тока состоят из синусоидальных частей.
![]() ;
;
 .
.
Порядок гармоник ![]() .
.
![]() .
.
Этот результат представлен графически на рисунке В.4 и, как правило, позволяет получить практическую оценку, в частности для приводов с большой индуктивностью в цепи постоянного тока.
Примечание - Высокие пульсации гармонических токов 7-го и 13-го порядков являются сдвинутыми по фазе, что выражается отрицательными значениями графиков на рисунке В.4.
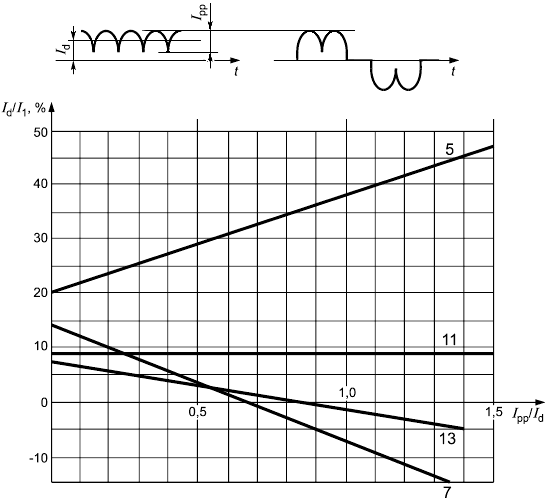
Рисунок В.4 - Основные гармонические составляющие питающего тока при токе питания прямоугольной формы с идеализированными пульсациями постоянного тока
В.4.3.2 Трапециевидный ток питания с идеализированными пульсациями постоянного тока
Если в дополнение к случаю, приведенному выше, принять во внимание угол коммутации, оценка становится более сложной. Она описана в трудах IEEE по промышленному применению (N 1, январь/февраль 83).
В.4.4 Диодные выпрямители
Другой конфигурацией преобразователя является диодный выпрямитель со стороны питания ЭПТ. В самом общем случае трехфазного моста результирующий коэффициент гармоник тока в основном зависит от времени отпирания диодов, т.е. от полного эквивалентного реактивного сопротивления .
На рисунке В.5 показан инвертор с диодным выпрямителем на входе. Преобразователь показан с трехфазным полным сопротивлением, учитывающим фильтр и линию питания постоянного тока. Сопротивление преобразователя может быть определено как двукратное значение сопротивления фильтра, просуммированного с сопротивлением линии, если они соединены последовательно. На рисунке В.6 показана форма сигналов напряжения и тока входной цепи преобразователя при сопротивлениях источника и линии соответственно 2% и 6%.
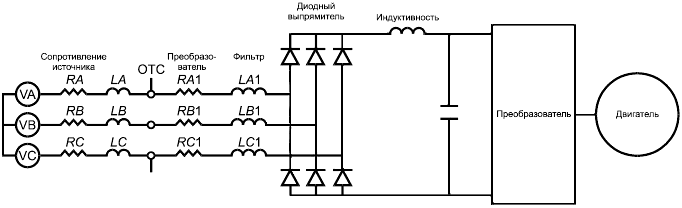
Рисунок В.5 - Преобразователь с диодным выпрямителем на входе и ШИМ инвертором или прерывателем постоянного тока
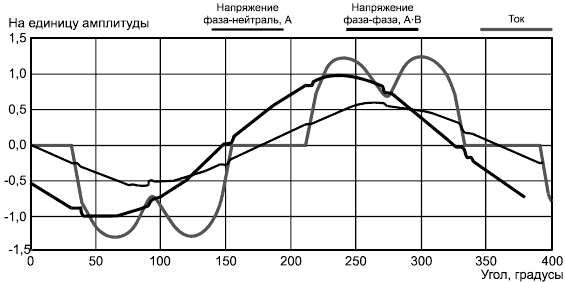
Рисунок В.6 - Преобразователь мощности с диодным преобразователем на линии питания и ШИМ инвертор или прерыватель постоянного тока
Примечание - Внутреннее сопротивление источника равно 2%, внутреннее сопротивление преобразователя равно 6%.
Коэффициент искажения напряжения со стороны линии растет с увеличением сопротивления преобразователя и снижается с увеличением сопротивления источника. На рисунке В.7 показаны коэффициенты искажения напряжения и тока со стороны питающей линии в функции полного сопротивления источника и преобразователя соответственно.
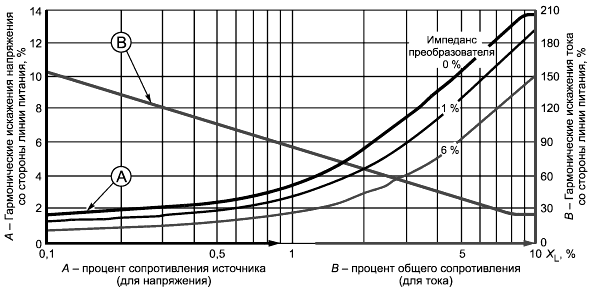
Рисунок В.7 - Преобразователь мощности с выпрямителем на подводящей линии
В.4.5 Диодные выпрямители без индуктивности в цепи постоянного тока
Частный случай - преобразователи, которые не имеют индуктивности в цепи постоянного тока (БМП малых мощностей).
Искажение тока в цепи питания находится в обратной зависимости к общей (входной) индуктивности, которая включает в себя сумму внутренних сопротивлений преобразователя и источника (см. рисунок В.8).
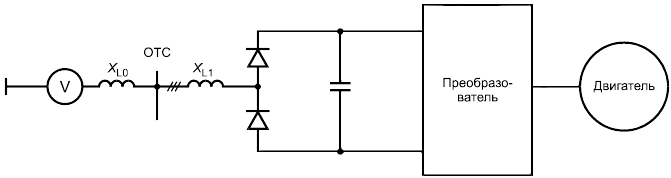
Рисунок В.8 - Диодный выпрямитель без индуктивности линии постоянного тока
Значение , o.e., составляет:
 ,
,
где - фактическое значение и не обязательно - номинальное.
 ,
, ![]() .
.
Примечание - Это различные определения для , в о.е.
Результаты для искажения тока приведены на следующих рисунках. Для отдельных гармоник токов см. рисунок В.9, а для коэффициентов искажения тока см. рисунок В.10.
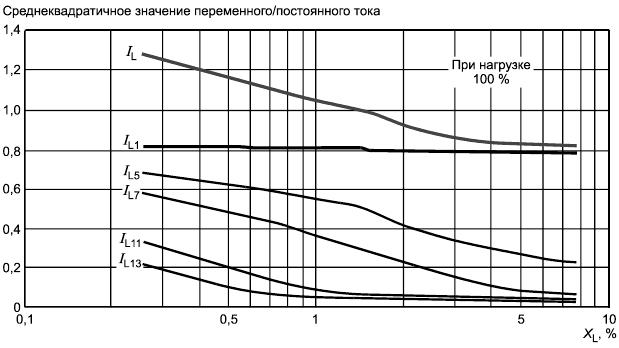
Рисунок В.9 - Входной гармонический ток
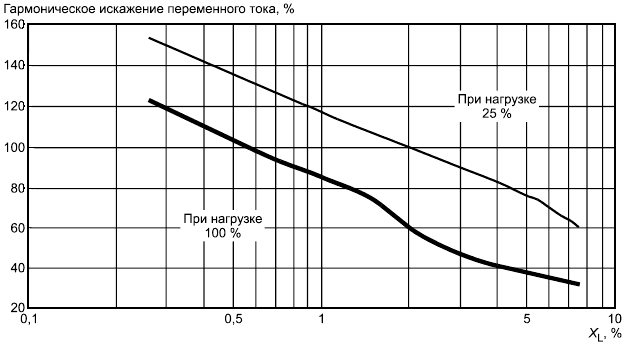
Рисунок В.10 - Искажение входного тока
В.4.6 Резюме
Все эти приближения предоставляют информацию об обычном гармоническом составе. Они справедливы для идеального оборудования, не имеющего технологических отклонений. Поскольку идеального оборудования быть не может, эти результаты имеют отличия между заданным и действительным значениями угла включения или выключения активных элементов. Как результат, может быть получен случайный или нерегулярный состав гармоник, включающий четные или тройные гармоники.
В.5 Пример оценки гармонического влияния ЭПТ
Абстрактный пример гармонических искажений (ограничен для простоты 25 порядком гармоник) отображает практическую оценку связи между эмиссией и помехоустойчивостью в условиях влияния электропривода, как указано в 4.1.
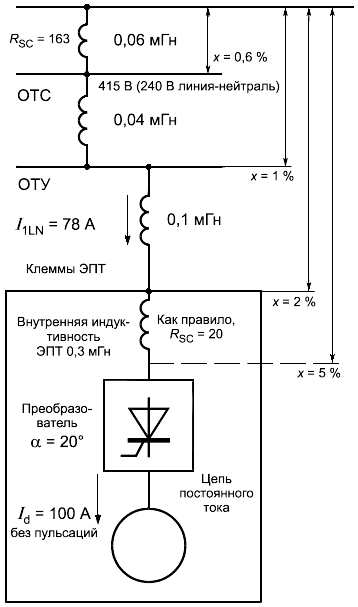
Рисунок В.11 - Пример простой структуры
6-импульсный тиристорный преобразователь в составе электропривода (ЭПТ) с внутренней индуктивностью 0,3 мГн подключен к сети (РСС) через индуктивности 0,1 и 0,04 мГн.
Внутренняя индуктивность распределительной сети в ОТС составляет 0,06 мГн. Номинальное межфазное напряжение составляет 415 В при 50 Гц (фазное напряжение - 240 В).
Для простоты примера постоянный ток представлен без каких-либо пульсаций и равно 100 А. Результирующий ток
равен 78А. Это соответствует
, равному 163 в ОТС. Гармонические токи согласно МЭК 60146-1-2 (рисунок 7) оцениваются с учетом угла пуска
, равного 20° (
2,55%, угол переключения
7,3°).
В таблице В.3. показан вклад преобразователя в гармоническое напряжение фаза - нейтраль (размерность - вольты).
Таблица В.3 - Гармоники, вносимые приводом
5 | 7 | 11 | 13 | 17 | 19 | 23 | 25 | |
| 15,4 | 10,8 | 6,4 | 5,3 | 3,7 | 3,2 | 2,3 | 1,9 |
| 1,44 | 1,42 | 1,33 | 1,31 | 1,20 | 1,13 | 1,00 | 0,90 |
| 2,41 | 2,37 | 2,22 | 2,18 | 2,00 | 1,89 | 1,66 | 1,50 |
| 4,8 | 4,8 | 4,5 | 4,4 | 4,0 | 3,8 | 3,4 | 3,0 |
| 12,1 | 11,9 | 11,1 | 10,9 | 10,0 | 9,5 | 8,3 | 7,5 |
Итог этого влияния в ранее существовавшее искажение напряжения в ТСУ или ОТС является довольно сложным вопросом. Однако для получения грубой оценки результирующего искажения может быть использован упрощенный подход, приведенный в МЭК 61800-3 (пункт В.2.3.3).
В.6 Ослабление гармонических искажений
Компенсация коэффициента мощности и подавление гармоник являются двумя тесно связанными проблемами.
Кроме того, местные и в результате многочисленные средства компенсации сильно увеличивают риск появления резонанса в системе. Следовательно, имеет смысл разработать единую стратегию компенсации для всей установки.
Чаще всего она заключается в установке фильтров, настроенных на наиболее опасные порядки гармоник. Это общий способ решения проблемы.
Гармоники привода могут быть подавлены дополнительными трансформаторами со сдвигом фаз (изменение коэффициента пульсаций преобразователя). Получаемая с вторичных обмоток трансформатора, соединенных по схеме треугольник или звезда, мощность реализуется главным образом в гармониках тока 12 ±1. Обычно пятая и седьмая гармоники тока снижаются до 10% по сравнению с 6-импульсными значениями. Для преобразователей типа 1 требуются соответствующие углы задержки. Рисунки В.4 и В.6 для 12-пульсного процесса должны быть изменены. На рисунке В.6 полное среднеквадратичное значение следует пересчитать.
Для составных типов приводов 1-е или 2-е питание от трансформаторов со сдвигом фаз приводит к некоторому снижению содержания полного гармонического.
В.7 Коммутационные провалы
Подробный временной анализ может быть использован для коммутационных провалов, которые представляют часть гармонической эмиссии преобразователя (МЭК 60146-1-2, пункт 3.5). Они являются результатом межфазных коротких замыканий на фидерах при каждом переключении фаз, коммутируемых преобразователем.
Трехфазный мостовой преобразователь состоит из шести полупроводниковых ключей, соединенных, как показано на рисунке В.12. Передача тока с одного ключа к другому в том же ряду (к одному из трех в верхнем ряду или одному из трех в нижнем) называется коммутацией. В процессе коммутации два (или три) полупроводника проводят одновременно в том же ряду, что вызывает кратковременное короткое замыкание между фазами питания. Линейное напряжение на клеммах моста падает до нуля, и появляются провалы в линейном напряжении (см. рисунок В.13).
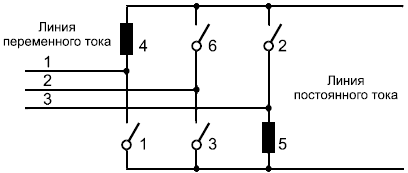
Рисунок В.12 - Трехфазный 6-пульсный мостовой преобразователь
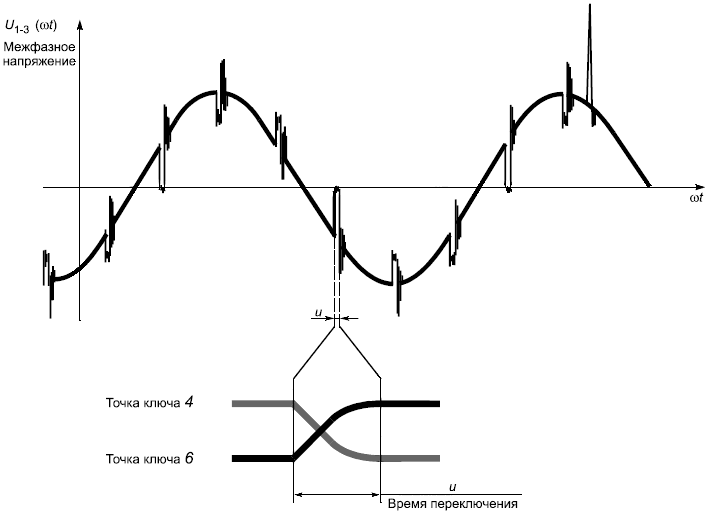
Рисунок В.13 - Провалы при коммутации в схемах с трехфазным 6-пульсным мостовым преобразователем
Провалы в линии питания от другого преобразователя будут разряжать RC-снабберы тиристорных преобразователей и RC-цепочки в линии переменного тока. Дополнительный разряд сглаживающего конденсатора снаббера может вызвать перегрев и отказ резистора, включенного последовательно с конденсатором. Провалы при коммутации также могут быть емкостно связаны с регулятором преобразователя через питающий трансформатор, вызывающий отказ регулятора или проблемы стабильности привода.
Максимальный провал при переключении происходит при работе в режиме ограничения тока.
Короткое замыкание (КЗ), связанное с провалом, может быть полным, если преобразователь подключается к питанию без использования развязывающих устройств (например, провал может достигать глубины 100%). КЗ может быть ограничено, если преобразователь подключен к ОТС через реактивное сопротивление (см. рисунок В.14 для эквивалентной цепи). Тогда глубина провала зависит от полного сопротивления развязки, как показано далее:
![]() ,
,
где - глубина провала, в процентах.
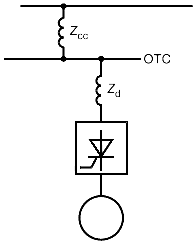
Рисунок В.14 - Эквивалентная цепь для оценки уменьшения коммутационного провала
Это означает, что глубина провала может быть снижена при уменьшении и увеличении
.
может быть увеличено установкой разделительных трансформаторов или реакторов. Устанавливаемые разделительные трансформаторы или реакторы должны быть размещены как можно ближе к мостовому преобразователю, чтобы они также не создавали сбои в цепях коммутации и управления.
Глубина провала может быть снижена перемещением точки соединения как можно ближе к источнику питания. Это способствует снижению общего сопротивления до тех пор, пока сохраняется сумма
![]() (
( увеличивается при удлинении кабеля в то время, как
снижается).
Однако участок провала, наблюдаемый в ТС, не зависит от значения реактивного сопротивления развязки. Сохраняя все остальное постоянным, увеличение реактивного сопротивления развязки снижает глубину провала, однако увеличивает его ширину. Таким образом, площадь провала кардинально не меняется.
В.8 Защита от падений и кратковременных прерываний напряжения
Оборудование, которое охватывает настоящий стандарт, может быть чувствительным к падению и кратковременному прерыванию напряжения питания. В течение таких возмущающих воздействий вращательная способность двигателя значительно снижается, двигатель стремится к остановке. Исполнительный механизм, как правило, продолжает работать в течение периода восстановления питания. Поскольку преобразователь более не синхронизирован с двигателем, случайный перезапуск может привести к недопустимым превышениям токов (с риском повреждения оборудования), приводящим к срабатыванию защитных отключающих цепей и остановке системы. Чтобы избежать таких последствий, в большинстве случаев электропривод прекращает работу при обнаружении потери питания. Для применений, требующих непрерывной работы, между пользователем и поставщиком и/или производителем должны быть всесторонне согласованы технические требования.
Возможно несколько решений, представленных ниже.
Источник бесперебойного питания (ИБП)
Такое решение может обеспечить бесперебойную работу электропривода. Выбор ИБП проводится исходя из номинальной мощности электропривода и максимальной продолжительности возмущающего воздействия.
Компенсация падения напряжения (преодоление понижения напряжения)
Это решение позволяет осуществить непрерывную эксплуатацию исполнительного оборудования в процессе значительного падения амплитуды трехфазного напряжения, если является приемлемым снижение скорости. Максимальное значение падения трехфазного напряжения, максимальная продолжительность данного возмущения, допустимое снижение скорости исполнительного оборудования и нагрузочная характеристика являются необходимыми данными для точного определения необходимой компенсации падения напряжения.
Перезапуск на ходу после кратковременного прерывания питания
При падении трехфазного напряжения и кратковременных прерываниях питания, если данные неисправности носят продолжительный характер, не компенсируются системой электропривода, а также отсутствует резервное питание, электропривод не может сохранять работоспособность. Скорость снижается в зависимости от момента нагрузки, инерции исполнительного оборудования и двигателя, моментов потерь трения и продолжительности возмущения. Возможна полная остановка двигателя. Однако в ряде случаев возможно выполнить перезапуск на ходу путем восстановления питания в процессе работы исполнительного оборудования. Такое решение может потребовать датчика скорости. Расчетные параметры для его реализации включают в себя максимальную продолжительность возмущения и продолжительность между восстановлением питания и возвратом машины к ее начальной скорости. В отсутствие такой возможности обычно приходится останавливать исполнительное оборудование и/или процесс.
В.9 Ссылочные документы
МЭК 60364-3:1993 Электроустановки зданий. Часть 3. Оценка общих характеристик
МЭК 61000-2-1:1990 Электромагнитная совместимость (ЭМС). Часть 2. Окружающая среда. Раздел 1. Описание окружающей среды. Электромагнитная обстановка для проводимых низкочастотных возмущений и сигнализация в общественных системах питания
IEEE 519:1992 Рекомендуемые инструкции и требования для гармонического управления в энергосистемах
IEEE 597:1983 Инструкции и требования для тиристоров общего назначения для двигателей постоянного тока.
IEE Транзисторы для промышленности. Приложение N 1, январь/февраль 83.
Приложение С
(справочное)
Вспомогательное оборудование
С.1 Общая информация
Электрооборудование, входящее в состав ЭПТ, с регулируемой скоростью может быть подвергнуто нестандартным условиям эксплуатации. Например, трансформаторы и реакторы могут работать при различных гармонических токах и импульсной нагрузке. Данное приложение предназначено помочь в определении таких участков для этого типа вспомогательного оборудования.
С.2 Трансформаторы
Трансформаторы (разделительные и автотрансформаторы) можно использовать на входе БМП.
Такие трансформаторы, как правило, не являются определяющими для работы преобразователя, но предназначены удовлетворять одно или более требований, приведенных ниже:
- создавать необходимые уровни напряжения;
- определять соответствие нормам и правилам;
- осуществлять изоляцию (гальваническую развязку);
- удовлетворять требования к заземлению;
- осуществлять подавление помех;
- снижать уровень токов короткого замыкания;
- увеличивать число пульсаций;
- снижать уровень гармонических составляющих.
Конструкции демпферов, ![]() ,
, или реактивных цепей в преобразователе основываются на значении внутреннего сопротивления источника питания. Трансформаторы могут быть использованы также для получения необходимого полного сопротивления.
Примечание - Трансформаторы подвергаются воздействию токов и напряжений с гармоническими составляющими.
С.2.1 Напряжение
Когда напряжение питания отличается от номинального входного напряжения преобразователя, можно использовать повышающий или понижающий трансформатор или автотрансформатор на входе преобразователя. Необходимая трансформация напряжения может быть достигнута использованием трансформаторов, питающих смешанные нагрузки. В случае мощных преобразователей отдельно установленные трансформаторы могут быть предназначены для одиночных преобразователей или групп преобразователей.
С.2.2 Нормативные документы
В местных или заводских нормах могут указываться требования к изоляции, которые могут требовать использования входных трансформаторов.
С.2.3 Обеспечение непрерывности работы установок с опасностью соединения с землей
Для некоторых применений инженерная практика может диктовать использование незаземленных или заземленных через большое сопротивление цепей на КП/БМП и двигателях. Такое применение, как правило, имеет место в отраслях промышленности с непрерывными процессами, такими как целлюлозное и бумажное, пищевое, химическое, цементное, горнодобывающее производство или металлургия.
Опасности замыкания на землю цепей являются общими для этих производств из-за влияния влаги или внешних условий на данные цепи и систему изоляции двигателя. Чтобы поддерживать непрерывность работы в режиме нежелательного соединения с землей, используют разделительный трансформатор для гальванической изоляции цепей КП/БМП от общей распределительной сети. Таким образом, возможна непрерывная работа КП/БМП на ответвленной цепи с единственным нежелательным заземлением. Чтобы обеспечивать непрерывную защиту, потребитель должен определить при первой же возможности замыкания на землю.
Использование трансформатора для обеспечения непрерывной работы в условиях нежелательного замыкания на землю не следует путать с защитой преобразователя от замыкания на землю. Защита от короткого замыкания на землю будет защищать преобразователь при условиях, указанных производителем, но не может обеспечивать желаемой непрерывной работы.
С.2.4 Дисбаланс линейного напряжения
Дисбаланс напряжения больше, чем 3% между фазами линии питания, может вызвать созданные линией переменного тока номинальные линейные токи, превышающие номинальные. Разделительный трансформатор может быть оборудован выводами, которые используются для компенсации дисбаланса напряжения при всех режимах номинальной нагрузки.
С.2.5 Снижение входных гармонических токов преобразователя
Входные токи КП/БМП в основном несинусоидальные. Эти токи имеют синусоидальную составляющую тока (известную как ток основной гармоники) на частоте питания и дополнительные синусоидальные компоненты тока (известные как токи высших гармоник) на частотах, отличающихся от частоты питания.
Токи высших гармоник не способствуют передаче полезной мощности и создают дополнительную вольт-амперную нагрузку на распределительную систему, поэтому желательна минимизация этих гармонических токов сети.
Для определенных типов КП/БМП гармонический состав тока питания может быть изменен путем размещения дополнительного полного сопротивления между входом преобразователя и системой питания. Для изменения полного сопротивления питающего фидера могут быть использованы трансформаторы.
Дополнительная информация по изменению полного сопротивления фидера и минимизации провалов линейного напряжения содержится в приложении В.
С.2.6 Снижение ожидаемого тока короткого замыкания на входе преобразователя
Когда ожидаемый ток короткого замыкания в точке соединения (ТС) преобразователя больше, чем установленная производителем перегрузочная способность преобразователя по току короткого замыкания, между системой питания и преобразователем для снижения ожидаемого тока может быть включен трансформатор.
С.2.7 Число пульсаций
В некоторых случаях трансформаторы или автотрансформаторы используются для увеличения числа пульсаций и, следовательно, снижения нелинейного искажения напряжения.
С.3 Реакторы
Для компенсации дисбаланса линейного напряжения, изменения внутреннего сопротивления фидера, минимизации провалов напряжения сети и снижения ожидаемого тока КЗ вместо трансформаторов могут использоваться сетевые реакторы.
Реакторы (с железным и воздушным сердечниками) также используются в схемах преобразователей ЭПТ как фильтры, элементы цепей коммутации, элементы для сглаживания, балансировки токов и т.д.
Конструкция этих реакторов имеет особенности, связанные со структурой используемого преобразователя.
С.4 Коммутационная аппаратура
Коммутационная аппаратура (разъединители, автоматические выключатели, комбинированные пускатели, контакторы и т.д.) могут быть использованы на входе ЭПТ.
Такая аппаратура не меняет существа работы преобразователя и предназначается для удовлетворения одного или более из следующих требований:
- обеспечение соответствия местным нормам;
- выполнение эффективной изоляции (безопасность);
- защита.
С.5 Справочные документы
МЭК 60289:1988 Реакторы
МЭК 60364-4-46:1981 Электроустановки зданий. Часть 4. Требования по безопасности - Глава 46: изоляция и переключение
МЭК 60364-5-537:1981 Электроустановки зданий. Часть 5. Подбор и монтаж электрооборудования. Глава 53: высоковольтный распределитель и аппаратура управления. Раздел 537: устройства для изоляции и переключения
UL 508 Промышленные контроллеры
UL 508C Преобразователи
NEMA ICS 1.1 Инструкции по безопасности для использования, монтажа и обслуживания управляющих полупроводниковых приборов
NEMA ICS 1-11A Импульсное испытание
NEMA ICS 7 Управление производственными системами, приводы с регулируемой скоростью
NEMA ICS 7.1 Правила безопасности для построения и руководство по выбору, установке и работе систем с регулируемым скоростным приводом
prEN 50178 Электрооборудование для использования в энергетических установках
IEEE 519: 1992 Руководящие указания и требования для контроля гармоник в энергосистемах
IEEE 597: 1983 Инструкции и требования для тиристоров общего назначения для приводов постоянного тока
IEEE P936: 1987 Руководство для самокоммутируемых преобразователей
IEEE P995: 1987 Руководящие указания для определения КПД приводов переменного тока с регулируемой скоростью
Приложение D
(справочное)
Принципы управления
Существуют различные принципы управления, которые используют для того, чтобы достичь наилучшего компромисса между показателями, такими как требуемая производительность при всех скоростях, получение необходимых скорости и момента вращения, высокий КПД, низкое содержание гармоник, высокий входной коэффициент мощности и т.д.
D.1 Структура системы управления
Основной задачей электропривода постоянного тока с регулируемой частотой вращения является управление переменными технологического процесса (см. рисунок D.1). Под управляемой переменной может подразумеваться линейная скорость, положение, усилие или некоторые другие физические величины.
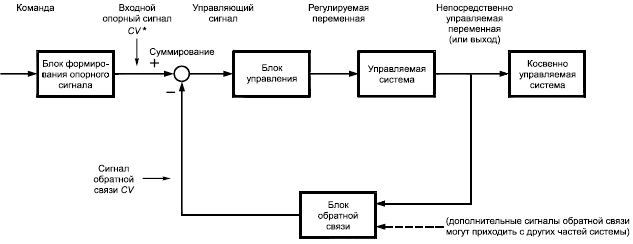
Примечание - CV - регулируемая величина, отображенная на схеме как:
- задание CV*,
- измеренное действительное значение CV.
Рисунок D.1 - Основные элементы структуры системы управления с обратной связью
В общем случае в системе управления с обратной связью контроллер и система управления двигателем постоянного тока могут быть рассмотрены отдельно.
Контроллер сравнивает действительное значение технологического параметра с заданным значением и выдает сигнал, который является управляющим для системы управления двигателем постоянного тока. Функцией системы управления двигателем постоянного тока является регулирование значения заданной переменной (координаты) двигателя постоянного тока в соответствии со значением, заданным управляющим контроллером.
Конфигурация и работа управляющего контроллера выходит за рамки данной части МЭК 61800.
В данном приложении рассматриваются лишь структуры систем управления двигателями постоянного тока.
D.1.1 Базовая структура
Базовая структура системы управления двигателем должна обеспечивать ряд требований, предъявляемых объектом, для которого применяется электропривод. Самые важные из этих требований:
a) определение переменной (координаты), которая измеряется и представляет собой первичный сигнал обратной связи; она может быть скоростью вращения (регулирование скорости с обратной связью по скорости), напряжением постоянного тока (управление скоростью с обратной связью по напряжению якоря машины постоянного тока) или моментом вращения, который определяется током (в обмотке якоря и обмотке возбуждения);
b) работа с ослаблением поля;
c) работа с изменением направления тока в обмотке якоря или направления тока возбуждения;
d) изменение направления тока в обмотке якоря, если такое имеется, с наличием уравнительного тока.
В таблице D.1 приведены девять вариантов базовых структур (от А до I) системы управления двигателем постоянного тока, основанные на перечисленных требованиях и их возможных комбинациях.
Таблица D.1 - Основные варианты структур системы управления
Варианты | Варианты систем управления | ||||||||
А | В | С | D | Е | F | G | Н | I | |
Устройство обратной связи | Тахогенератор | Датчик напряжения в цепи постоянного тока | |||||||
Без/с ослабления поля | Без | С | Без* | ||||||
Без/с изменения направления тока в обмотке якоря | Без | С | Без | С | Без | С | |||
Изменение направления тока в обмотке якоря без/с уравнительного тока | Без | С | Без | С | Без | С | |||
Без/с изменения направления тока возбуждения | А1, без | D1, Без D2 С | G1, Бeз G2 С | ||||||
* Когда для обратной связи применяют датчик напряжения в цепи постоянного тока, возможна работа с ослаблением поля подачей сигнала скорости на регулятор тока возбуждения через функциональный генератор, формирующий связь между током возбуждения и скоростью при постоянном напряжении на обмотке якоря. Этот метод известен давно. | |||||||||
Регулирование тока не рассматривается как особый вариант, принимая во внимание, что, как правило, все перечисленные в таблице D.1 варианты снабжены регулятором тока.
Конфигурации А и G являются простейшими. Они соответствуют работе без ослабления поля и изменения направления тока в обмотке якоря, в них используют в качестве устройства обратной связи тахогенератор или преобразователь напряжения постоянного тока соответственно. Все другие конфигурации могут быть получены дополнительными специальными средствами.
На рисунке D.2 показана блок-схема, содержащая большинство структур управления. Со ссылкой на этот рисунок в таблице D.2 каждая структура управления разбивается на составные блоки.
В некоторых системах электропривода применяется система управления, которая использует параллельные контуры регулирования скорости и тока как альтернативу классической конфигурации с последовательным включением регулятора.
D.1.2 Дополнительные средства
Кроме основной структуры, системы управления двигателем постоянного тока имеют некоторые разновидности. Наиболее распространенные из них перечислены в таблице D.2. Они также показаны на блок-схеме, представленной на рисунке D.2.
Таблица D.2 - Состав типовых структур управления
Состав типовых структур управления | Структура системы управления | |||||||||
А | В | С | D | Е | F | G | Н | I | ||
Основные блоки | Тахогенератор | |||||||||
Регулятор напряжения якоря | ||||||||||
Регулятор скорости | ||||||||||
Ограничитель тока | ||||||||||
Регулятор тока | ||||||||||
Блок управления затвором | ||||||||||
Логика включения | ||||||||||
Регулирование возбуждения двигателя | ||||||||||
Инверсная логика | ||||||||||
По выбору | Внутренний источник опорного напряжения | |||||||||
Схема выбора опорного сигнала | ||||||||||
Генератор пилообразных импульсов | ||||||||||
Ограничитель тока в функции скорости | ||||||||||
Компенсация падения напряжения (IR) | ||||||||||
Внешний вспомогательный источник опорного напряжения | ||||||||||
Адаптивный регулятор тока | ||||||||||
Регулятор контурного тока | ||||||||||
Регулятор скорости, усиливающий коррекцию в процессе ослабления поля возбуждения | ||||||||||
Минимальное и полное ограничение поля | ||||||||||
| ||||||||||
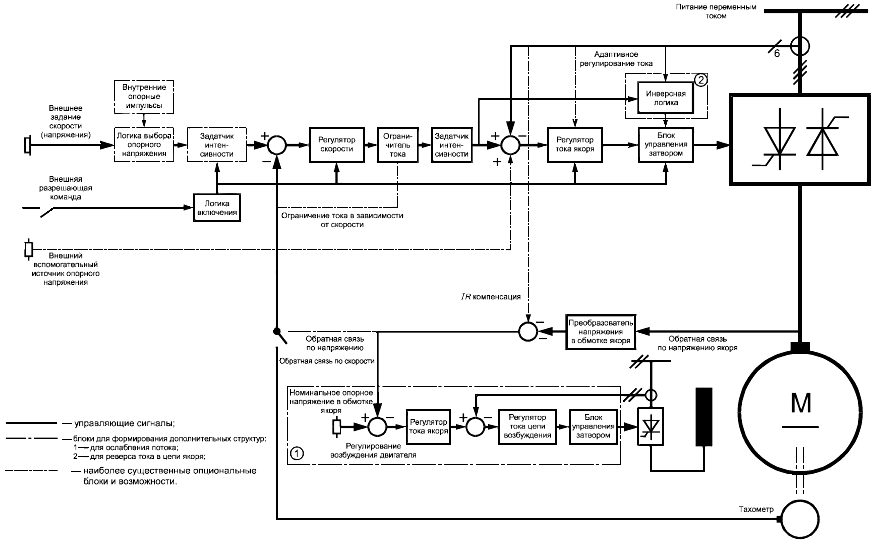
Рисунок D.2 - Блок-схема
D.1.3 Цифровое и аналоговое управление
Управление двигателем может быть выполнено аналоговым или цифровым методом.
При использовании цифровых методов, система имеет одно или несколько времен выборки, обеспечиваемых таймерами.
Время выборки - период, за который измеряемые для расчета величины являются постоянными, выполняются расчеты, а их результаты также являются постоянными.
Время выборки выбирается с учетом постоянных времени процесса управления и времени срабатывания, необходимого процессу. Принимается также в рассмотрение время передачи сигнала между различными цифровыми системами.
D.2 Режимы управления
D.2.1 Режимы работы
Работа оборудования с точки зрения требований механизма происходит в одном из двух основных режимов. Ими являются:
a) режим управления моментом вращения;
b) режим управления скоростью.
При определении момента вращения важно различать:
- электромагнитный момент вращения, произведенный электрической машиной;
- механический момент вращения на валу.
Последняя переменная описывает механическую систему моментом сопротивления. Если не указано иное, обычно предполагается, что "момент вращения" - это электромагнитный момент без учета момента сопротивления и потерь.
D.2.2 Управление с обратной связью
В данном разделе рассматриваются три типа контуров обратной связи:
a) разомкнутая система управления без обратной связи;
b) замкнутая система управления с косвенной (определяемой путем расчета требуемой переменной) обратной связью. Этот расчет выполняется на основе измерений электрических переменных, таких как напряжение, магнитный поток, ток, импульсы управления преобразователя и т.д. Производитель должен указывать, как была рассчитана эта обратная связь, т.е. какие используются переменные, на каком роде тока и т.п.;
c) замкнутая система управления с непосредственной обратной связью (датчик). Производитель должен указывать требования к рабочим характеристикам датчика: точности, ширине диапазона измерения и т.д.
D.2.3 Точностные характеристики
В таблице D.3 предложен обобщенный формат описания с целью помочь пользователю проанализировать способ управления электропривода с точки зрения получения требуемых характеристик. Эта таблица помогает производителю задать статические и динамические характеристики регулирования. Производитель указывает точность в устойчивых состояниях для каждого режима работы при:
- низкой скорости;
- средней скорости (50% основной скорости);
- основной скорости;
- максимальной скорости.
Таблица D.3 - Варианты управления электроприводом
Рабочий режим | Тип обратной связи | Статические характеристики (точность/диапазон регулирования) | Динамические характеристики (время регулирования) | |||
Низкая скорость | Средняя скорость | Основная скорость | Макси- | |||
Режим регулирования момента вращения | Без обратной связи | |||||
С косвенной обратной связью | ||||||
С непосредственной обратной связью | ||||||
Режим регулирования скорости | Без обратной связи | |||||
С косвенной обратной связью | ||||||
С непосредственной обратной связью | ||||||
Примечание 1 - Диапазон рабочих и эксплуатационных изменений в процессе регулирования и работы отнесены к номинальным значениям (см. 6.1). Примечание 2 - От основной до максимальной скорости КП обеспечивает снижение возбуждения двигателя. В этих условиях двигатель работает в режиме ослабления потока с постоянной мощностью. | ||||||
D.3 Установившиеся и переходные режимы
D.3.1 Характеристика процесса во времени
Данная характеристика представляет собой кривую выходной переменной в зависимости от времени, получаемую при указанном входном воздействии и при указанном режиме работы. Элементы опорного входного сигнала по команде производят необходимый сигнал и передают его в точку суммирования. Заданное значение достигается, когда сигнал обратной связи равен опорному входному сигналу (см. рисунок D.1).
D.3.1.1 Время отклика (быстродействие)
Время отклика - время, проходящее от подачи задающего (ступенчатого) воздействия на систему до момента достижения регулируемой величиной указанного значения (см. рисунки D.3, D.4, D.5).
Примечание - Указанное значение часто принимают как значение ошибки, указанной для заданного значения переменной в процентах.
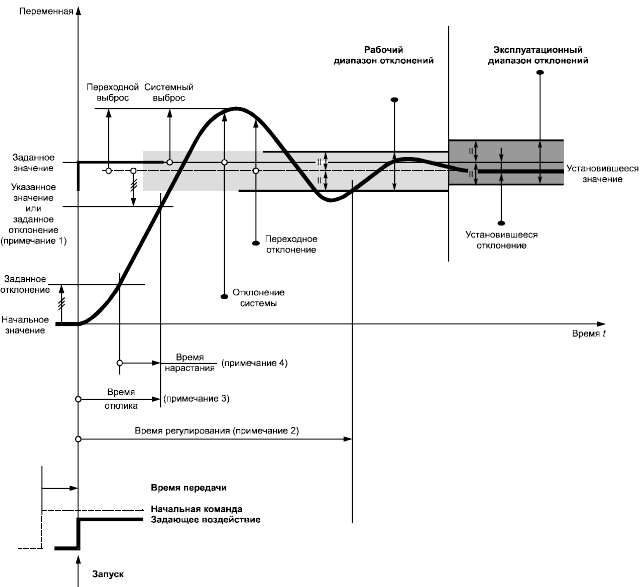
Примечание 1 - Указанное значение часто принимается как значение ошибки относительно установившегося значения.
Примечание 2 - Время регулирования: если диапазон не указан, должно соответствовать рабочему диапазону отклонений, отцентрированному относительно установившегося значения.
Примечание 3 - Время отклика: если отклонение не указано, может соответствовать первому значению переменной вниз или вверх от рабочего диапазона отклонений.
Примечание 4 - Время нарастания: если отклонение не указано, может соответствовать значению переменной вниз или вверх от рабочего диапазона отклонений. (Как правило, время нарастания определяется как время между 10% и 90% заданного значения.)
Рисунок D.3 - Переходный процесс при ступенчатом изменении опорного входного сигнала при постоянной нагрузке
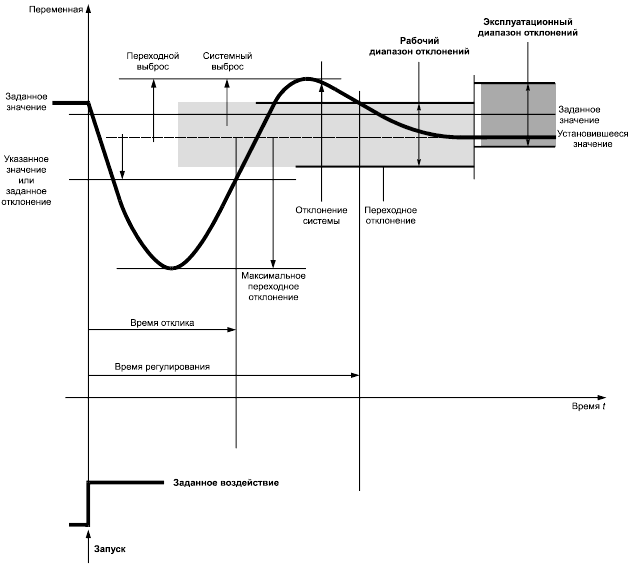
Рисунок D.4 - Переходный процесс при ступенчатом изменении нагрузки при постоянном опорном входном сигнале
D.3.1.2 Время нарастания
Время нарастания - время постоянного возрастания регулируемой переменной, необходимое для ее изменения от заданного значения вблизи начального до заданного вблизи требуемого. Указанные значения часто принимаются соответственно от 5% до 10% и от 95% до 90% от заданного установившегося значения переменной (см. рисунок D.3).
Если термин "время нарастания" не определен, подразумевается отклик системы на ступенчатое воздействие, иначе должны быть указаны форма и амплитуда воздействия.
D.3.1.3 Время регулирования
Время регулирования - время после возникновения входного воздействия на систему, необходимое для входа заданной переменной и сохранения ее в пределах указанной полосы, отцентрированной относительно ее установившегося значения (см. рисунки D.3, D.4).
Примечание - Если данная полоса не указана, следует считать, что это - рабочий диапазон отклонения.
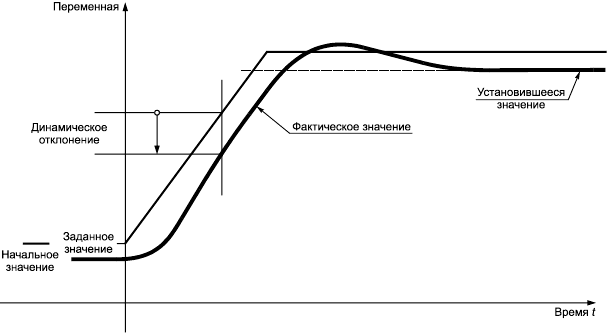
Рисунок D.5 - Переходный процесс при изменении задающего сигнала на указанное значение
D.3.2 Выполнение отдельных функций
По отдельным функциям может быть запрошена дополнительная информация.
D.3.2.1 Регулирование отношения взаимных скоростей
Регулирование взаимоотношения скоростей - регулирование, направленное на два электропривода при предварительно задаваемом соотношении скоростей. Диапазон регулирования взаимоотношения скоростей в случае прямой пропорциональной зависимости между скоростями двух приводов, как показано на рисунке D.6, является, как правило, выраженным как плюс или минус в процентах от скорости ведущего привода.
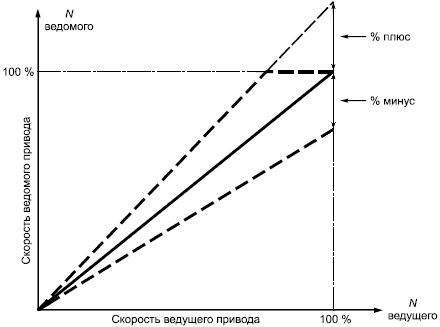
Рисунок D.6 - Система с ведущим/ведомым приводом
D.3.2.2 Задатчик интенсивности (нарастания скорости)
Работа задатчика интенсивности определяется требуемым значением ускорения или замедления, которое должно быть установлено для электропривода. В дополнение должно быть рассмотрено применение быстрого снижения скорости для аварийного останова.
D.3.2.3 Токоограничение - ограничитель момента вращения
Характеристики ограничителя тока/момента вращения определяют диапазоном, в котором должно быть установлено ограничение тока.
D.3.2.4 Время реверса тока в цепи якоря
Для электроприводов с реверсом тока в якорной цепи без уравнительного тока существует интервал времени в процессе реверса тока, на котором ток равен нулю. На рисунке D.7 показан метод измерения времени реверса. Условия проверки: скорость равна нулю, отсутствует поток возбуждения, вал двигателя заблокирован, прикладывается сигнал задания на изменение тока от номинального до требуемого обратного. Проводят измерение и записывают результаты.
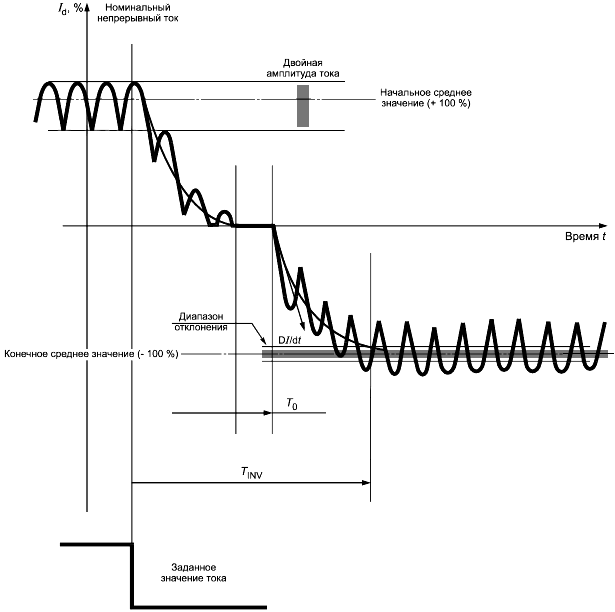
- интервал нулевого тока,
- время реверса: оно начинается с начала ступенчатого сигнала и продолжается до тех пор, пока среднее значение тока не окажется в рабочем диапазоне отклонений. Время реверса зависит от скорости изменения тока
Рисунок D.7 - Время реверса с нулевым током
D.4 Перечень характерных параметров управления
D.4.1 КП/БМП параметры управления
Согласно рисунку D.2, основными параметрами КП/БМП являются:
- время ускорения до достижения расчетной скорости в прямом направлении;
- время замедления от расчетной скорости в прямом направлении;
- время ускорения до достижения расчетной скорости в обратном направлении;
- время замедления от расчетной скорости в обратном направлении;
- коэффициент усиления регулятора скорости в случае его наличия;
- постоянная времени регулятора скорости в случае его наличия;
- ограничение заданного значения прямого тока;
- ограничение заданного значения обратного тока;
- ограничения ;
- коэффициент усиления регулятора тока;
- постоянная времени регулятора тока;
- ограничения угла включения (выпрямление и рекуперация);
- ограничение напряжения постоянного тока;
- коэффициент усиления регулятора потока;
- постоянная времени регулятора потока и т.д.
D.4.2 Параметры двигателя
Параметры двигателя включают в себя:
- сопротивление обмотки якоря;
- индуктивность обмотки якоря;
- сопротивление цепи обмотки возбуждения;
- индуктивность цепи возбуждения.
D.4.3 Механические параметры
Механические параметры включают в себя:
- момент инерции (включая ротор двигателя);
- упругость;
- зазоры;
- другие параметры.
D.4.4 Параметры питания
Параметры питания включают в себя:
- отношение короткого замыкания;
- гармонический импеданс;
- импеданс линии питания (по основной гармонике) или продолжительная токовая нагрузка.
D.5 Структуры
D.5.1 Функциональные структуры
Переменные электропривода - скорость и крутящий момент.
Ссылаясь на рисунок D.8.
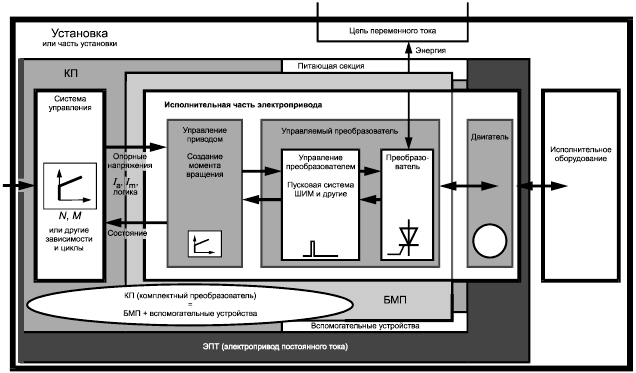
Рисунок D.8 - Структура системы электропривода
Двигатель - преобразователь электрической энергии в механическую. Он производит электромагнитный момент вращения, регулируемый с помощью силовой электроники.
Преобразователь - силовой электронный блок. Совокупность преобразователя и системы управления составляет управляемый преобразователь.
Система управления приводом осуществляет управление моментом вращения и контролирует электромагнитные свойства двигателя посредством управляемого преобразователя.
Двигатель, силовая часть преобразователя и элементы управления им составляют исполнительную часть электропривода. Система управления передает опорные сигналы, команды в исполнительную часть электропривода.
Совокупность системы управления, исполнительной части электропривода и исполнительное оборудование составляет технологическую установку или ее часть.
D.5.2 Структура оборудования
Структура аппаратной части представляет различные компоненты электропривода и является его элементной моделью в отличие от функциональной структуры.
Структура аппаратной части - вопрос технологии разработки и комплектации. Различные поставщики могут нести ответственность за различные компоненты в зависимости от их квалификации в данной области. Исполнительное оборудование не включают в определение электропривода.
Принято определять КП как часть электропривода без двигателя с соединенными с ним датчиками. Как видно из раздела 2 (рисунок 2) и показано на рисунке D.8, КП может быть разделен на базовый модуль привода (БМП) и его расширения. БМП может включать или не включать в себя регулятор скорости.
БМП или КП могут поставляться отдельно. Будучи подключенными к двигателю, они становятся частью электропривода (ЭПТ).
D.5.3 Важные вопросы показателей электропривода
Специфика работы КП/БМП заключается в формировании тока двигателя, определяющего момент вращения.
Скоростная характеристика электропривода зависит от совместной работы КП/БМП, двигателя и исполнительного оборудования. Некоторые механические параметры механизма, такие как упругость и люфт, могут вносить ограничения в работу электропривода, поскольку они влияют на время отклика регулятора скорости.
D.5.3.1 Влияние упругости
Подключение двигателя к исполнительному оборудованию через вал и/или механическую передачу может вызывать крутильные колебания с собственной частотой , зависящей от инерционной массы и упругости передачи согласно формуле:
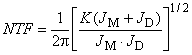 ,
,
где - момент инерции двигателя;
- момент инерции исполнительного оборудования;
- динамическая жесткость передачи (
![]() упругость).
упругость).
Это уравнение относится к двухмассовой системе. (Система с тремя или более массами создает две или более частоты ). В большинстве случаев частота
является весьма высокой.
Если мы имеем:
![]() ,
,
где - требуемое время срабатывания регулятора скорости, то скорость отработки практически не зависит от электрических и механических параметров привода. Она в большей степени связана с характеристиками системы управления, особенно с качеством механических и электрических датчиков, и, главным образом, постоянной времени и коэффициентом демпфирования регулятора скорости.
Максимальное отклонение скорости также зависит от инерционности системы электропривода и/или значения шага, если используется ступенчатое нагружение.
В некоторых случаях, особенно когда передающий вал имеет низкое значение динамической жесткости (например, если он длинный) и велика инерция исполнительного оборудования, частота привода может быть менее чем
![]() .
.
В этом случае, чтобы избежать вибрации при работе, время отклика регулятора скорости настраивают на увеличенное значение с учетом в зависимости от значений механических параметров (инерционной массы и динамической жесткости передачи). Следовательно, для одного и того же значения момента инерции и параметров системы управления максимальное кратковременное отклонение скорости при ступенчатом изменении нагрузки выше, чем определенное в системе, где
![]() .
.

Рисунок D.9 - Кинематическая схема
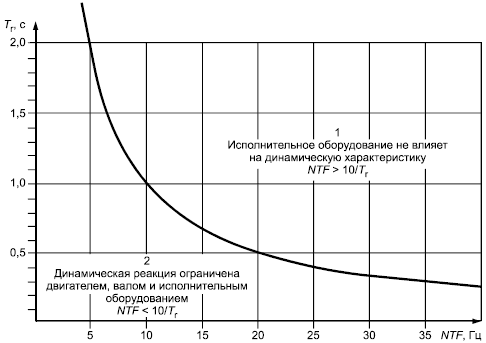
- необходимое время реакции регулятора скорости;
- собственная частота крутильных колебаний
Рисунок D.10 - Простой критерий устойчивости
D.5.3.2 Влияние зазоров
Зазоры в зубчатом зацеплении вносят нелинейность в электропривод, в котором имеется возможность изменения направления момента вращения (например, при ступенчатом снижении задания скорости в электроприводах с четырехквадрантным преобразователем) (см. рисунок 3).
Реверс момента вращения на очень короткое время открывает возможный зазор, отъединяя двигатель от исполнительного оборудования и приводя к снижению момента инерции системы. Таким образом, регулятор скорости возбуждает кратковременные колебания в зубчатой передаче. В этом интервале времени система может находиться в режиме колебаний, которые демпфируются после определенного количества циклов (в зависимости от коэффициента демпфирования системы).
Данная вибрация может быть снижена, однако не всегда устранена с помощью специальной функции компенсации зазора.
В процессах, требующих хороших динамических характеристик привода, необходимо минимизировать зазор в зубчатом зацеплении.
Приложение Е
(справочное)
Защита
Е.1 Введение
Приложение помогает пользователю понять, как правильно защитить ЭПТ/КП/БМП. Методы применяют по отдельности, но могут иметь общую классификацию в соответствии с физическими явлениями, лежащими в их основе. Применение будет также зависеть от самой установки. Приложение предоставляет только общую информацию для подготовки оборудования.
Е.2 Эксплуатационная готовность оборудования
Термин "Эксплуатационная готовность оборудования" относится к его непрерывной работе. Цепи защиты реагируют в основном на внешние факторы, которые влияют на систему электропривода.
Е.2.1 Защитные цепи оборудования
Цепи защиты должны предотвращать отказы оборудования, а также повреждение установки или компонентов. Превышение допустимых значений переменных вызывает срабатывание этих цепей. Допустимые значения устанавливаются ниже порогов разрушения для соответствующих компонентов.
Е.2.2 Типы аварийной сигнализации и отказов в оборудовании
Аварийная сигнализация и отказы классифицируют по четырем категориям, относительного того, насколько критичным является отказ и как быстро необходимо защитное действие. Примеры приведены на рисунке Е.1. Согласно приложению могут быть использованы четыре категории. При использовании они определяются таким образом, чтобы исключить остановку оборудования, а отказ стал причиной наименее возможного прерывания в процессе работы исполнительного оборудования. Такие стратегии должны быть согласованы между пользователем и производителем. Аварийная сигнализация и сообщения об отказах могут быть отображены по отдельности в системе мониторинга оборудования или передаваться на мониторы поста управления.
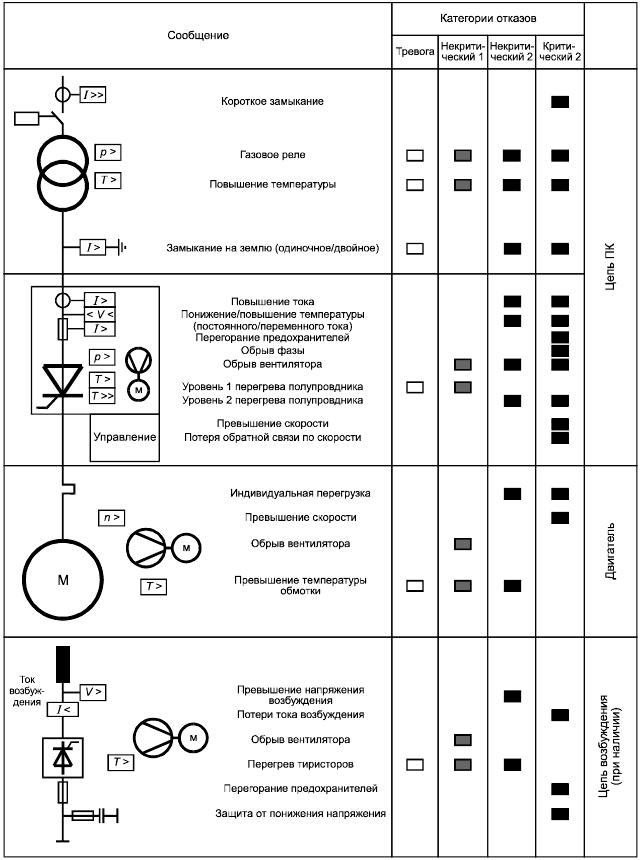
Рисунок Е.1 - Классификация защит
Для индикации ненормальных состояний оборудования могут быть использованы следующие категории сообщений.
a) Тревога
Сообщение, которое отображает ненормальные условия, которые не требуют немедленного действия (например, короткое замыкание на землю). Тревога будет действовать до ее сброса и исчезнет только после снятия причины, ее вызвавшей.
b) Некритический отказ 1
Неисправность, как правило, связана с медленным превышением температуры. Производственный процесс может быть остановлен на разумное время, которое должно быть согласовано между потребителем и производителем в соответствии с производственным графиком, например остановка производства без потерь изготовленного материала.
c) Некритический отказ 2
Производство продолжается на короткое, разумное время, которое должно быть согласовано между потребителем и производителем в соответствии с производственным процессом. Продукция может быть сохранена перед отключением оборудования.
d) Критический отказ
Оборудование отключается напрямую, и производство прерывается незамедлительно. Продукция может превратиться в отходы.
Е.2.3 Перечень сигналов тревоги и неисправностей
Необходимые сообщения и установленные значения, предлагаемые производителем, должны быть согласованы между ним и потребителем (см. рисунок Е.1). Примеры иллюстрируют сообщения и отказы высококачественных приводов с КП. Простые применения привода могут обеспечивать только функции сигнализации и срабатывания.
Е.3 Защита системы (характеристики и устройства)
Цель настоящего подраздела - помочь потребителю рассмотреть методики и выбрать необходимые устройства для правильной защиты системы. Система включает в себя, но не ограничивается этим:
a) питающую линию;
b) разделительные трансформаторы;
c) двигатели;
d) блоки конденсаторов для коррекции коэффициента мощности;
e) управляющие цепи.
Защита вспомогательных устройств осуществляется путем согласования устройств защиты, сопротивления цепи, разрядников, реле и сигнальных устройств. Эти устройства предотвращают опасные повышения напряжения, превышения тока и температуры.
Механические датчики также устанавливают на двигатели, трансформаторы и другое оборудование при необходимости определить превышение скорости, избыточную вибрацию, отсутствие смазки, отсутствие вентиляции и другие неподходящие условия работы. Они сигнализируют об остановке системы перед возникновением механических повреждений.
Е.4 Защита системы электропривода
Е.4.1 Защита, включенная в состав КП/БМП
Требования системы защиты электропривода (см. рисунок Е.1) будут зависеть от назначения и конфигурации оборудования. Для защиты оборудования от повреждений, происходящих из-за непредвиденных обстоятельств, рекомендуется защита согласно рисунку Е.1.
Хорошо спроектированная система также обеспечивает защиту против непредвиденных обстоятельств, могущих возникнуть внутри и вне системы электропривода. Это включает:
a) перебои в работе источника питания:
- броски напряжения,
- понижение/повышение напряжения,
- обрыв фазы, изменение чередования фаз,
- асимметрию фаз,
- перебои в питании;
b) условия превышения тока:
- токи КЗ,
- блуждающие токи,
- внутренние неисправности,
- перегрузки;
c) вентиляционные потери;
d) перегрев оборудования;
e) внезапное изменение давления в заполненных жидкостью реакторах и трансформаторах;
f) превышение скорости двигателей;
g) чрезмерную вибрацию двигателей;
h) потери на смазку двигателя.
Примечание - Кратковременные блуждающие токи должны быть приняты во внимание из-за емкости на землю нагрузки/системы.
Е.4.2 Особые средства защиты двигателя
Двигатели и их электрические цепи должны быть надежно защищены с использованием релейных устройств, которые могут отключать преобразователь. Кроме того, для двигателей свыше 300 кВт настоятельно рекомендуется защита от превышения тока и перегрузки с использованием датчиков превышения температуры обмотки.
Е.4.3 Особые средства защиты трансформатора
Защиту разделительного трансформатора, как правило, обеспечивают реле. Необходима защита от перегрузки по току в первичных цепях. Для мощных устройств, как правило, предоставляется защита от короткого замыкания на землю и дифференциальная токовая. Следует обратить внимание на влияние гармоник при выборе реле для этих целей.
Защиту от перенапряжений, как правило, обеспечивают на первичных обмотках разделительных трансформаторов. При правильной координации она может защитить всю систему от скачков линейного напряжения, вызванных грозой и переходными процессами в высоковольтном распределителе.
Е.5 Другие ссылочные документы
МЭК 60204 Электрооборудование производственных установок
Приложение F
(справочное)
Топологии
F.1 Топологии преобразователя (конфигурации)
F.1.1 Введение
Рисунки F.1 и F.2 предлагают классификацию топологий силового преобразователя для электропривода постоянного тока.
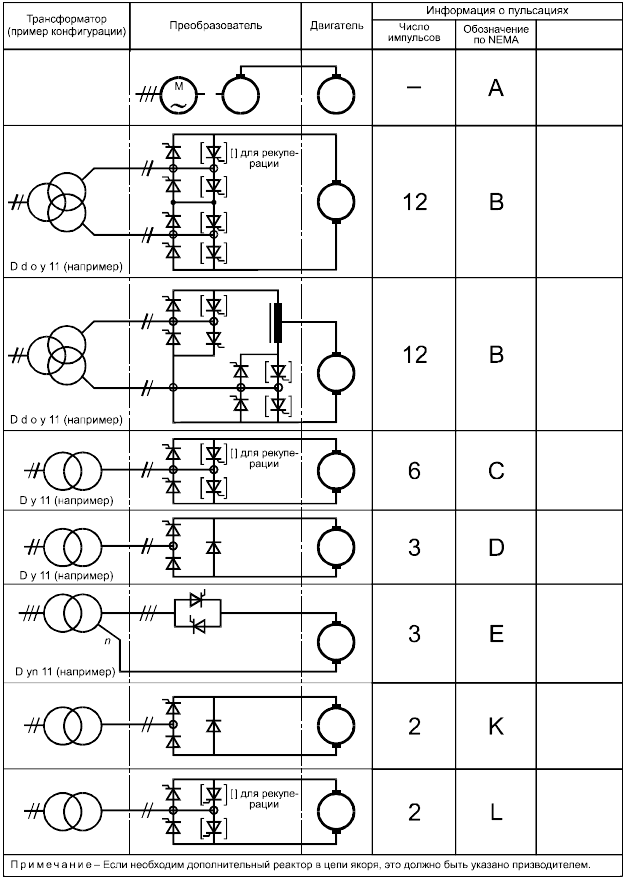
Рисунок F.1 - Основные конфигурации для ведомых сетью преобразователей
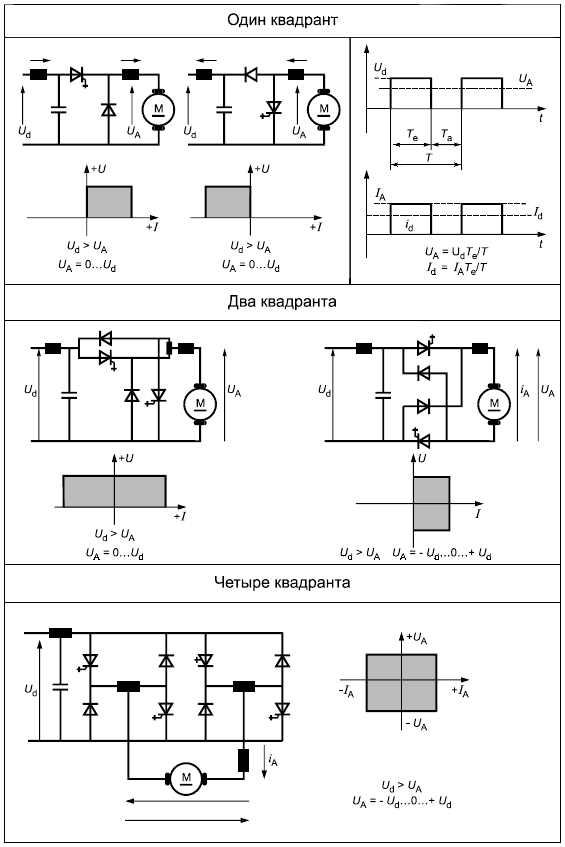
Рисунок F.2 - Преобразователи с внутренней коммутацией (прерыватели)
F.1.2 Топологии преобразователя
На рисунке F.1 показаны основные конфигурации для ведомых сетью преобразователей. На рисунке F.2 показаны конфигурации преобразователей (прерывателей) с внутренней коммутацией. На рисунке F.3 приведены символы, используемые для ведомых сетью преобразователей. На рисунке F.4 приведены символы, используемые для прерывателей.
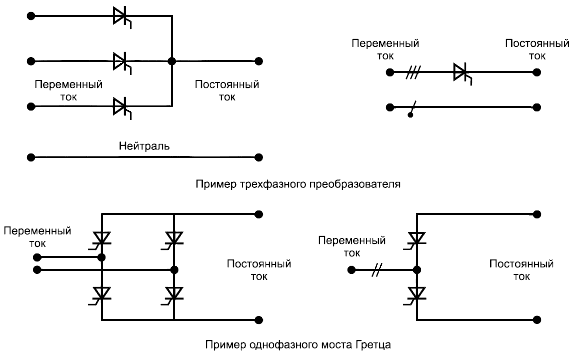
Рисунок F.3 - Символика обозначений преобразователей
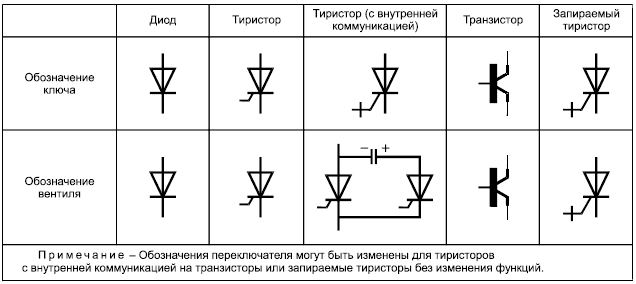
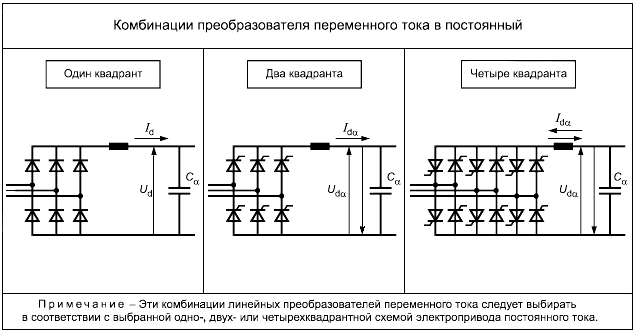
Рисунок F.4 - Обозначения схем прерывателей
F.2 Результаты
Согласно 5.4 постоянный ток, питающий двигатель, имеет пульсации, которые зависят от топологии преобразователя. Прерывистый ток оказывает непосредственное влияние на коммутационный износ двигателя. Испытания, описанные в 7.4.2.4, предназначены для привода с конкретным типом преобразователя.
Возможно, что испытания двигателя проводят в лаборатории производителя с преобразователем, имеющим пульсации по классу А. Эти испытания не являются представительными для окончательной характеристики коммутационной способности двигателя. В таком случае, как показывает опыт, безыскровая коммутация будет получена (код 1 согласно таблице 10) при 1,5-кратном номинальном токе. Такой результат в основном обеспечивает правильную работу с преобразователями с классом пульсаций С.
Коммутация двигателя постоянного тока зависит от многих параметров, включая влажность воздуха. В начальный период работы на медных коллекторных пластинах двигателя образуется естественный налет. Налет на коллекторе образуется в результате:
- изнашивания поверхности коллекторных пластин;
- неровностей медной поверхности;
- неправильной обработки изоляции;
- недостаточной притирки щеток;
- неправильного положения щеточной траверсы;
- неправильного наклона и прижатия щетки.
Опыт показывает, что удовлетворительными являются:
- износ поверхности коллекторных пластин менее 20 мкм для двигателей с высотой оси не более 250 мм;
- износ поверхности коллекторных пластин менее 30 мкм для больших двигателей;
- шероховатость поверхности контактов для промышленных двигателей 0,9![]() 1,8 мкм (от нескольких кВт до сотен кВт);
1,8 мкм (от нескольких кВт до сотен кВт);
- шероховатость поверхности контактов для двигателей малой мощности (менее 1 кВт) 0,5![]() 1,0 мкм с достаточной плотностью выступов.
1,0 мкм с достаточной плотностью выступов.
- это среднее значение шероховатости: среднеарифметическое всех значений у шероховатости профиля по отношению к длине
.
 и
и  .
.
![]()
Схема вентиля с q тиристорами, соединенными последовательно, и р ветвями, соединенными параллельно (изображение вентиля включает все необходимые защитные устройства)
Примечание - Многофазный преобразователь изображен однолинейной схемой, на которой многофазные цепи представлены их эквивалентными однолинейными схемами.
Приложение G
(справочное)
Функции контроля
G.1 Общие сведения
Контроль всей системы электропривода разделяется на две части:
- контроль состояния КП;
- контроль состояния двигателя.
Дополнительно существуют два способа контроля, которые могут вести к двум различным стратегиям:
- контроль для отдельной системы электропривода;
- контроль для системы электропривода, интегрированной в общую систему автоматизации.
Контроль системы КП обычно дает более подробную информацию об отказе и состоянии на местную панель управления (включена в состав КП или БМП), светодиоды или буквенно-цифровой код на светодиодах, или ЖК-дисплей, или терминал (программатор, персональный компьютер).
G.2 Технология
Системы, основанные на аналоговой технике, как правило, имеют менее сложные системы контроля, используя светодиод для состояния и отказов. Могут быть обеспечены некоторые иные сообщения (по месту и/или удаленно), например:
- о максимальной безопасной скорости;
- о максимальной скорости;
- о предельном значении тока;
- о действительном токе нагрузки;
- о действительной скорости;
- о других граничных условиях;
- об отказах.
Микропроцессорные системы, как правило, представляют больший объем информации (состояние, тревога, отказы) через цифровые коды или текст. Эти системы позволяют выполнять управление с помощью обычной клавиатуры и дисплея. Дисплей может, в частности, обеспечивать:
- изменение параметров (таких как усиление регуляторов, ускорение, замедление и т.д.);
- контроль управляемых переменных (таких как скорость, напряжение, действительные значения тока или опорные сигналы);
- хронологические записи переменных и т.д.
Эти системы могут обеспечивать сложные связи, используя последовательные или параллельные каналы с непосредственным соединением или многоабонентской шиной.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов ссылочным национальным стандартам Российской Федерации и действующим в этом качестве межгосударственным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
МЭК 60034-1:2004 | MOD | ГОСТ Р 52776-2007 (МЭК 60034-1-2004) "Машины электрические вращающиеся. Номинальные данные и характеристики" |
МЭК 60034-2-1:2007 | IDT | ГОСТ Р МЭК 60034-2-1-2009 "Машины электрические вращающиеся. Часть 2-1. Стандартные методы определения потерь и коэффициента полезного действия вращающихся электрических машин (за исключением машин для подвижного состава)" |
МЭК 60034-9:1997 (2003) | MOD | ГОСТ Р 53148-2008 (МЭК 60034-9:2003) "Машины электрические вращающиеся. Предельные уровни шума" |
МЭК 60038:1983 (2009) | - | * |
МЭК 60050-111:1996 | - | * |
МЭК 60050-151:2001 | - | * |
МЭК 60050-441:1984 | - | * |
МЭК 60050-551:1998 | - | * |
МЭК 60050-601:1985 | - | * |
МЭК 60076 (2011) | IDT | ГОСТ 30830-2002 (МЭК 60076-1-93) "Трансформаторы силовые. Часть 1. Общие положения" |
МЭК 60146-1-1:1991 (2009) | - | * |
МЭК 60146-1-2:1991 | - | * |
МЭК 60204-1:1992 (2005) | IDT | ГОСТ Р МЭК 60204-1-2007 "Безопасность машин. Электрооборудование машин и механизмов. Часть 1. Общие требования" |
МЭК 60364-4-41:1992 (2005) | - | * |
МЭК 60529:1989 (2001) | IDT | ГОСТ 14254-96 (МЭК 529-89) "Степени защиты, обеспечиваемые оболочками (код IP)" |
МЭК 60664-1:1992 (2000) | - | * |
МЭК 60721-3-1:1987 | - | * |
МЭК 60721-3-2:1997 | - | * |
МЭК 60721-3-3:1994 | - | * |
МЭК 61000-2-4:1994 (2002) | MOD | ГОСТ Р 51317.2.4-2000 (МЭК 61000-2-4-94) "Совместимость технических средств электромагнитная. Электромагнитная обстановка. Уровни электромагнитной совместимости для низкочастотных кондуктивных помех в системах электроснабжения промышленных предприятий" |
МЭК 61000-4-7:1991 (2009) | MOD | ГОСТ Р 51317.4.7-2008 (МЭК 61000-4-7:2002) "Совместимость технических средств электромагнитная. Общее руководство по средствам измерений и измерениям гармоник и интергармоник для систем электроснабжения и подключаемых к ним технических средств" |
МЭК 61136-1:1992 заменен МЭК/ТО 61800-6 (2003) | - | * |
МЭК 61800-3:1996 (2012) | - | * |
МЭК 106:1989 | - | * |
* Соответствующий национальный стандарт отсутствует. До его утверждения рекомендуется использовать перевод на русский язык данного международного стандарта. Перевод данного международного стандарта находится в Федеральном информационном фонде технических регламентов и стандартов. Примечание - В настоящей таблице использованы следующие условные обозначения степени соответствия стандартов: - IDT - идентичные стандарты; - MOD - модифицированные стандарты. | ||
____________________________________________________________________________________
УДК 621.313.3:006.354 ОКС 29.160.30; 29.200
Ключевые слова: машины электрические вращающиеся, силовые приводы переменного тока
____________________________________________________________________________________
Электронный текст документа
и сверен по:
, 2014
{kind=link}