ГОСТ ISO 6747-2018
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Машины землеройные
БУЛЬДОЗЕРЫ
Термины, определения и технические характеристики для коммерческой документации
Earth-moving machinery. Dozers. Terminology and commercial specifications
МКС 53.100
01.040.53
Дата введения 2021-07-01
Предисловие
Цели, основные принципы и общие правила проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Обществом с ограниченной ответственностью "ИЦ "ЦНИП СДМ" (ООО "ИЦ "ЦНИП СДМ") на основе собственного перевода на русский язык англоязычной версии международного стандарта, указанного в пункте 5
2 ВНЕСЕН Межгосударственным техническим комитетом по стандартизации МТК 267 "Строительно-дорожные машины и оборудование"
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 30 января 2018 г. N 105-П)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по МК (ИСО 3166) 004-97 | Сокращенное наименование национального органа по стандартизации |
Армения | АМ | ЗАО "Национальный орган по стандартизации и метрологии" Республики Армения |
Беларусь | BY | Госстандарт Республики Беларусь |
Казахстан | KZ | Госстандарт Республики Казахстан |
Киргизия | KG | Кыргызстандарт |
Россия | RU | Росстандарт |
Узбекистан | UZ | Узстандарт |
4 Приказом Федерального агентства по техническому регулированию и метрологии от 2 декабря 2020 г. N 1230-ст межгосударственный стандарт ГОСТ ISO 6747-2018 введен в действие в качестве национального стандарта Российской Федерации с 1 июля 2021 г.
5 Настоящий стандарт идентичен международному стандарту ISO 6747:2013* "Машины землеройные. Бульдозеры. Терминология и торговые технические условия" ("Earth-moving machinery - Dozers - Terminology and commercial specifications", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им межгосударственные и национальные стандарты, сведения о которых приведены в дополнительном приложении ДА
6 Настоящий стандарт может быть использован при ежегодной актуализации перечня стандартов, содержащих правила и методы исследований (испытаний), а также стандартов, в результате применения которых на добровольной основе обеспечивается соблюдение требований технического регламента Таможенного союза ТР ТС 010/2011 "О безопасности машин и оборудования"
7 ВЗАМЕН ГОСТ 29194-91 (ИСО 6747-88)
Информация о введении в действие (прекращении действия) настоящего стандарта и изменений к нему на территории указанных выше государств публикуется в указателях национальных стандартов, издаваемых в этих государствах, а также в сети Интернет на сайтах соответствующих национальных органов по стандартизации.
В случае пересмотра, изменения или отмены настоящего стандарта соответствующая информация будет опубликована на официальном интернет-сайте Межгосударственного совета по стандартизации, метрологии и сертификации в каталоге "Межгосударственные стандарты"
1 Область применения
Настоящий стандарт устанавливает терминологию и торговые технические условия для самоходных гусеничных и колесных бульдозеров и бульдозерного оборудования.
2 Нормативные ссылки
В настоящем стандарте применены нормативные ссылки на следующие международные стандарты, для недатированных ссылок применяют последнее издание ссылочного документа.
ISO 5010 Earth-moving machinery - Rubber-tyred machines - Steering requirements (Машины землеройные. Машины с резиновыми шинами. Требования к системам рулевого управления)
ISO 6014 Earth-moving machinery - Determination of ground speed (Машины землеройные. Определение скорости движения)
ISO 6746-1 Earth-moving machinery - Definitions of dimensions and codes - Part 1. Base machine (Машины землеройные. Определения размеров и коды. Часть 1. Базовая машина)
ISO 6746-2 Earth-moving machinery - Definitions of dimensions and codes - Part 2: Equipment and attachments (Машины землеройные. Определения размеров и коды. Часть 2. Оборудование и приспособления)
ISO 7457 Earth-moving machinery - Determination of turning dimensions of wheeled machines (Машины землеройные. Определение размеров поворота колесных машин)
ISO 9249:2007 Earth-moving machinery - Engine test code - Net power (Машины землеройные. Свод правил по испытанию двигателей. Полезная мощность)
ISO 15550:2002 Internal combustion engines. Determination and method for the measurement of engine power. General requirements (Двигатели внутреннего сгорания. Определение и метод измерения мощности двигателя. Общие требования)
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 Общие термины
3.1.1 бульдозер (dozer): Самоходная гусеничная или колесная машина оснащенная бульдозерным оборудованием, которое срезает, перемещает и распределяет материал за счет движения машины вперед, а также сменным оборудованием, используемым для реализации напорного или толкающего усилия (см. ISO 6165) [2].
Примечание - См. рисунки 10 и 11.
3.1.2 базовая машина (base machine): машина, оснащенная кабиной или навесом и, при необходимости, устройствами для защиты оператора, без рабочего или сменного оборудования, но с необходимыми элементами для их крепления (см. ISO 6746-1).
3.1.3 рабочее оборудование (equipment): Комплект составных частей, монтируемых на базовую машину для обеспечения выполнения сменным оборудованием ее основной функции в соответствии с назначением (см. ISO 6746-2).
3.1.4 сменное оборудование (attachment): Агрегат или узел, собранный из комплектующих, которые могут быть установлены на базовую машину или рабочее оборудование для специального использования (см. ISO 6746-2).
3.1.5 комплектующие (component): Деталь или узел, составляющие базовую машину, рабочее или сменное оборудование.
3.1.6 бульдозерное оборудование (dozing equipment): Передний отвал, его рама и устройства управления положением отвала.
3.1.6.1 бульдозер с неповоротным отвалом (straight dozer): Бульдозер, у которого отвал смонтирован так, что его режущая кромка в горизонтальной плоскости всегда перпендикулярна продольной оси машины.
Примечание - См. рисунок 1.
|
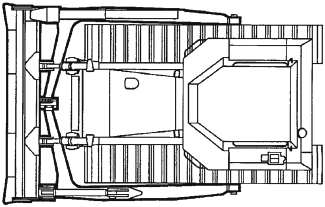
Рисунок 1 - Неповоротный отвал на гусеничном бульдозере
3.1.6.2 бульдозер с поворотным отвалом (angle dozer): Бульдозер, у которого отвал изменяет положение так, что его режущая кромка в горизонтальной плоскости устанавливается под углом в обе стороны от продольной оси машины.
Примечание - См. рисунок 2.
|
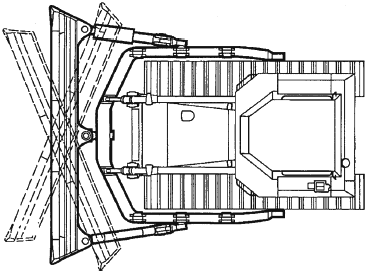
Рисунок 2 - Поворотный отвал на гусеничном бульдозере
3.1.6.3 перекос и наклон отвала (tilt and pitch): Разновидность движения отвала обоих типов бульдозера.
Примечание - Если бульдозерное оборудование имеет гидравлический привод перекоса или наклона, то положение отвала изменяется путем воздействия на орган управления гидросистемой.
3.1.6.4 перекос отвала (tilt movement): Движение, изменяющее положение отвала таким образом, чтобы его режущая кромка устанавливалась под углом к горизонтальной плоскости Z.
Примечание - См. рисунок 3.
|
Рисунок 3 - Перекос отвала
3.1.6.5 наклон отвала (pitch movement): Движение, изменяющее угол наклона верхней части отвала при его повороте относительно оси, параллельной режущей кромке.
Примечание - См. рисунок 4.
|
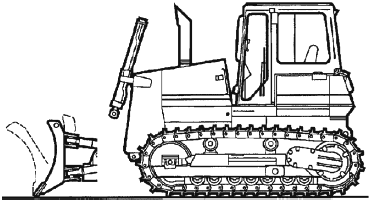
Рисунок 4 - Наклон отвала
3.1.7 рыхлитель (ripper): Оборудование, состоящее из рамы, соединенной с задней частью базовой машины кронштейном, и одного или нескольких рыхлящих зубьев.
Примечание 1 - См. рисунки 5, 6, 7. Размерные характеристики см. рисунок 19.
Примечание 2 - Различают четыре типа рыхлителей, определения которых даны в 3.1.7.1-3.1.7.4.
3.1.7.1 трехзвенный рыхлитель (radial type): Оборудование, у которого угол наклона наконечника зуба к грунту меняется в зависимости от глубины рыхления.
Примечание - См. рисунок 5.
|

Рисунок 5 - Трехзвенный рыхлитель
3.1.7.2 четырехзвенный рыхлитель параллелограмного типа (parallelogram type): Оборудование, у которого угол наклона наконечника зуба к грунту остается постоянным вне зависимости от глубины рыхления.
Примечание - См. рисунок 6.
|

Рисунок 6 - Четырехточечный рыхлитель
3.1.7.3 рыхлитель с изменяемым наклоном зуба (variable type): Оборудование, у которого угол наклона наконечника зуба к грунту является изменяемым и регулируется оператором.
Примечание - См. рисунок 7.
|
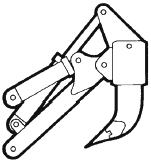
Рисунок 7 - Рыхлитель с изменяемым наклоном зуба
3.1.7.4 ударный рыхлитель (impact ripper): Оборудование с дополнительным ударным воздействием посредством импульсной гидросистемы.
3.1.8 лебедка (winch): Оборудование, состоящее из рамы, барабана с тросом и его привода, закрепленное сзади на базовой машине.
Примечание - См. рисунок 8. Размерные характеристики см. рисунок 20.
Примечание - Различают два типа управления лебедкой, определенных в 3.1.8.1 и 3.1.8.2.
|
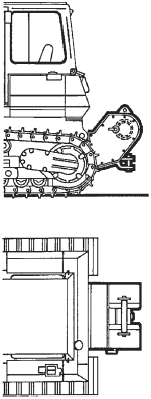
Рисунок 8 - Лебедка
3.1.8.1 лебедка с ручным управлением (manually-controlled winch): Тип лебедки, которая управляется посредством муфты сцепления и тормоза вручную.
3.1.8.2 лебедка с силовым управлением (power-controlled winch): Тип лебедки, которая управляется с помощью гидропривода или имеет усилители управления муфтой сцепления и тормоза.
3.1.9 поворотное (маятниковое) сцепное устройство (swinging drawbar): Устройство, состоящее из рамы, оборудованной поворотным сектором и сцепным устройством, закрепленным сзади на базовой машине.
Примечание - См. рисунок 9. Размерные характеристики см. рисунок 21.
|

Рисунок 9 - Поворотное сцепное устройство
3.1.10 опорная плоскость отсчета (ground reference plane) GRP: Плоскость, на которую устанавливается машина для проведения измерений: для базовой машины - твердая ровная поверхность, для рабочего и сменного оборудования - твердая ровная поверхность или уплотненная земля.
Примечание - Тип используемой поверхности зависит от предусмотренного применения машины, а также ее рабочего и сменного оборудования. Он должен определяться при разработке терминологических стандартов ISO или коммерческой документации (см. ISO 6746-1).
3.2 Массы
3.2.1 эксплуатационная масса (operating mass) OM: Масса базовой машины с рабочим оборудованием и сменным оборудованием без нагрузки в наиболее тяжелом сочетании по массе элементов машины, определенных изготовителем, оператором (75 кг), с полностью заполненным топливным баком и заполненными до уровня, установленного изготовителем, всеми жидкостными системами (гидравлическая жидкость, трансмиссионное масло, моторное масло, охлаждающая жидкость).
(См. ISO 6016 с учетом изменений в 3.2.1) [3].
3.2.2 Распределение массы по осям колесных машин
3.2.2.1 нагрузка на ось (axle load): Нагрузка на каждую ось от эксплуатационной массы машины (см. 3.2.1) (см. ISO 6016) [3].
3.2.2.2 максимальная нагрузка на ось (maximum axle load): Максимальная допустимая нагрузка на каждую ось, установленная изготовителем (см. ИСО 6016) [3].
3.2.2.3 усилие, приходящееся на ось (axle load force): Произведение нагрузки на ось с учетом ускорения свободного падения.
3.2.2.4 максимальное усилие, приходящееся на ось (maximum axle load force): Произведение максимальной нагрузки на ось и ускорения свободного падения.
3.2.3 отгрузочная масса (shipping mass) SM: Масса машины без оператора с полностью заправленной гидросистемой, системами смазки и охлаждения, 10%-ной заправкой топливного бака или с минимальным уровнем топлива, необходимого для целей отгрузки, как указано изготовителем, c учетом или без рабочего и сменного оборудования, балластом, кабиной, навесом, устройствами защиты оператора, колесами и противовесами по указанию изготовителя.
Примечание - При необходимости частичной разборки машины в целях перевозки массу разобранных узлов указывают дополнительно.
(См. ISO 6016 с учетом изменения в 3.2.6) [3].
3.3 Технические характеристики
3.3.1 полезная мощность двигателя (net power): Мощность, снимаемая на испытательном стенде с конца коленчатого вала или приведенная к нему при соответствующей частоте вращения коленчатого вала при наличии оборудования (в том числе вспомогательного), перечисленного в ISO 15550 таблица 1, колонки 2, 3 (см. ISO 9249).
3.3.2 максимальная скорость движения (maximum travel speed): Максимальная скорость машины, которая может быть получена на твердой ровной поверхности при движении в прямом и обратном направлениях при наивысшем доступном передаточном отношении и эксплуатационной массе, определенной по ISO 6014.
3.3.3 тяговое усилие (drawbar pull): Горизонтальная сила тяги, развиваемая в точке прицепа, выраженная в кН (см. ISO 7464)[4].
3.3.4 номинальный статический наклон машины (machine static slope capacity): Максимальный наклон, измеряемый в градусах, при котором жидкостные системы машины могут функционировать без неисправностей или повреждения любой из систем во всех положениях машины, указанных в 3.3.4.1, 3.3.4.2 (см. ISO 10266)[6].
3.3.4.1 номинальный статический продольный наклон машины (machine longitudinal static slope capacity): Максимальный наклон, измеряемый в градусах, который машина может достигать в продольном направлении (от 0° до 180°) при статическом наклоне без нарушения эксплуатационных характеристик (см. ISO 10266) [6].
3.3.4.2 номинальный статический поперечный наклон машины (machine) lateral static slope capability): Максимальный наклон, измеряемый в градусах, который машина может достигать в поперечном направлении (от 90° до 270°) при статическом наклоне без нарушения эксплуатационных характеристик (см. ISO 10266)[6].
3.3.5 Характеристики лебедки
3.3.5.1 усилие на канате (line pull): Тяговое усилие лебедки, измеряемое при намотке каната на пустой и полный барабан при номинальной частоте вращения коленчатого вала двигателя.
3.3.5.2 скорость намотки каната (line speed): Скорость лебедки, измеряемая при намотке каната на пустой и полный барабан при номинальной частоте вращения коленчатого вала двигателя.
3.3.6 тормозная система колесных машин (brake system wheeled machines): Все элементы, совместное действие которых останавливает и/или удерживает машину; система включает орган(ы) управления, систему приведения в действие тормоза, тормоза непосредственно и замедлитель, если машина им оборудована (см. ISO 3450)[1].
3.3.7 тормозная система гусеничных машин (brake system crawler machines): Все элементы, совместное действие которых останавливает и/или удерживает машину на месте. Тормозная система включает орган или органы управления, устройство приведения в действие тормоза, тормоз (тормоза) и элементы соединяющие тормоз с гусеницей (см. ISO 10265)[5].
3.3.8 радиус поворота колесных машин (turning radius of wheeled machines): Радиус поворота колесных машин определяют в соответствии с ISO 7457.
4 Базовая машина
4.1 Типы бульдозеров
Бульдозеры классифицируются в соответствии со следующими характерными признаками:
4.1.1 По конструкции ходового устройства;
4.1.1.1 Гусеничный бульдозер (см. рисунок 10);
|
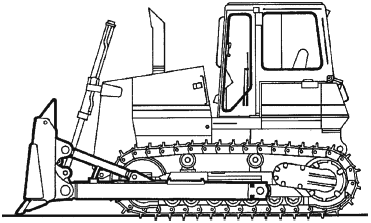
Рисунок 10 - Гусеничный бульдозер
4.1.1.2 Колесный бульдозер (см. рисунок 11).
|

Рисунок 11 - Колесный бульдозер
4.1.2 По системе управления поворотом
4.1.2.1 Поворот за счет шарнирно-сочлененной рамы для колесных машин (см. рисунок 12).
|
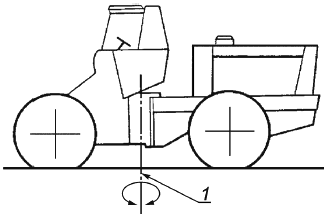
1 - ось поворота
Рисунок 12 - Поворот за счет шарнирно-сочлененной рамы
4.1.2.2 Поворот за счет вращения машины вокруг одной из гусениц (см. рисунок 13).
|
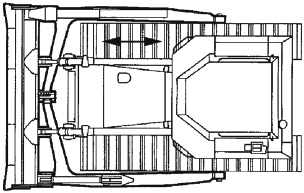
Рисунок 13 - Бульдозер с поворотом за счет вращения машины вокруг одной из гусениц
4.1.2.3 Поворот за счет независимого привода гусениц в том числе за счет их скольжения (см. рисунок 14).
|

![]() - направление движения правой гусеницы;
- направление движения правой гусеницы; ![]() - направление движения левой гусеницы
- направление движения левой гусеницы
Примечание - ![]() и
и ![]() имеют независимое друг от друга управление скоростью и направлением движения.
имеют независимое друг от друга управление скоростью и направлением движения.
Рисунок 14 - Бульдозер с независимым приводом гусениц
4.1.3 По расположению двигателя:
4.1.3.1 С передним расположением двигателя (см. рисунок 10);
4.1.3.2 С задним расположением двигателя (см. рисунок 11).
4.2 Габаритные размеры
4.2.1 Базовая машина
Для определения размеров см. ISO 6746-1.
Для определения размеров, относящихся непосредственно к бульдозерам см. приложение А.
4.2.1.1 Гусеничные машины (см. рисунок 15).
|

Н1 - максимальная высота; Н2 - максимальная высота без кабины или ROPS; Н3 - отгрузочная высота; Н4 - дорожный просвет; Н5 - высота грунтозацепа; L1 - максимальная длина; L2 - база гусеничной машины; L4 - задний свес; W1 - максимальная ширина; W2 - колея гусеничной машины; W4 - ширина башмака гусеницы; GRP - опорная плоскость отсчета; face - наружная поверхность
Рисунок 15 - Размеры базовой машины. Гусеничный бульдозер
4.2.1.2 Колесные машины (см. рисунок 16).
|
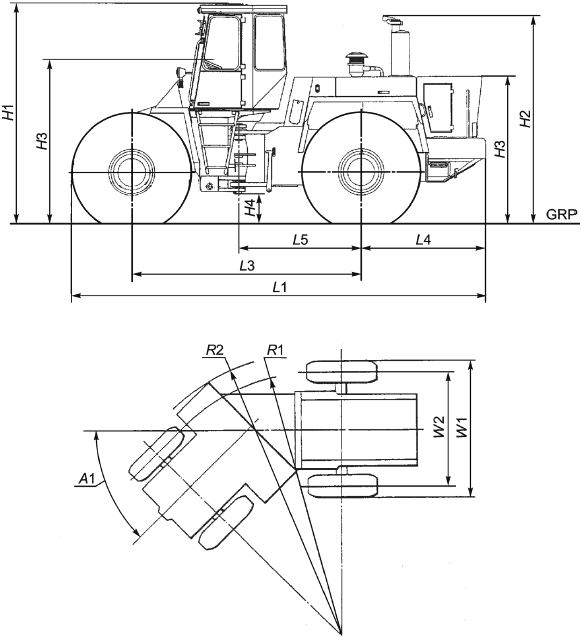
Н1 - максимальная высота; Н2 - максимальная высота без кабины или ROPS; Н3 - отгрузочная высота; Н4 - дорожный просвет; L1 - максимальная длина; L3 - колесная база машины; L4 - задний свес; L5 - расстояние между задней осью и осью поворота шарнирно-сочлененной рамы; W1 - максимальная ширина; W3 - колея колесной машины; R1 - радиус поворота; R2 - габаритный радиус поворота; А1 - угол складывания; GRP - опорная плоскость отсчета
Рисунок 16 - Размеры базовой машины. Колесный бульдозер
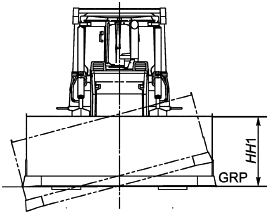
4.2.2 Рабочее оборудование
См. рисунки 17, 18, 19, 20 и 21.
Для определения размеров см. ISO 6746-1.
Для определения размеров, относящихся непосредственно к бульдозерам см. приложение А. ZHH
|

________________
* См. 3.1.10.
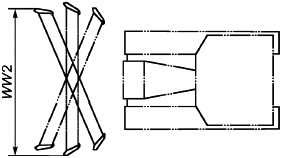
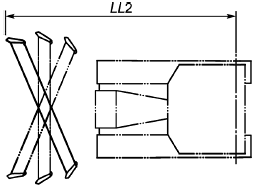
НН1 - высота отвала; НН2 - высота подъема; НН3 - глубина резания; НН4 - высота перекоса; LL1 - передняя проекция; LL2 - передняя проекция поворотного отвала; WW1 - максимальная ширина; WW2 - ширина поворотного отвала; WW3 - ширина С-образной тяговой рамы; АА1 - угол наклона; АА2 - угол поворота отвала
Рисунок 17 - Размеры гусеничного бульдозера с рабочим оборудованием
|
________________
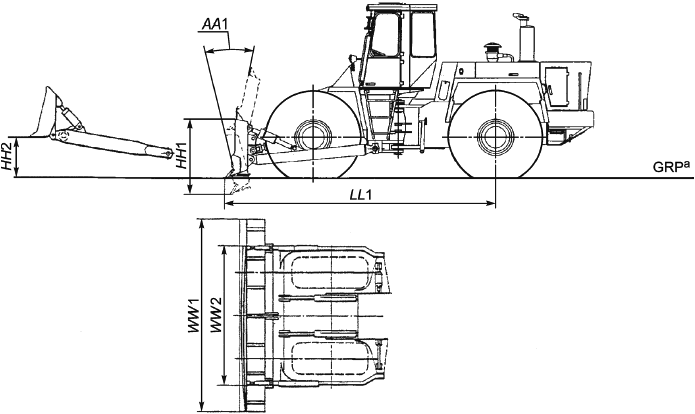
См. рисунок 16.
НН1 - высота отвала; НН2 - высота подъема; НН3 - глубина резания; НН4 - высота перекоса; LL1 - передняя проекция; WW1 - максимальная ширина; WW3 - ширина С-образной тяговой рамы; АА1 - угол наклона
Рисунок 18 - Размеры колесного бульдозера с рабочим оборудованием
|

________________
См. 3.1.10.
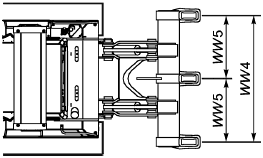
НН2 - высота подъема; НН3 - глубина резания; LL3 - задняя проекция; WW1 - максимальная ширина; WW4 - рабочая ширина рыхлителя; WW5 - межцентровое расстояние между зубьями
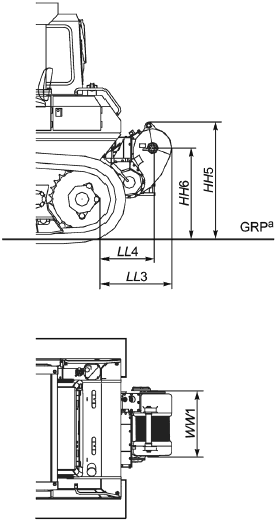
Рисунок 19 - Размеры рыхлителя
|
________________
См. 3.1.10.
НН5 - максимальная высота лебедки; НН6 - высота центра барабана лебедки; LL3 - задняя проекция; LL4 - осевая проекция; WW1 - максимальная ширина
Рисунок 20 - Размеры лебедки
|

________________
См. 3.1.10.
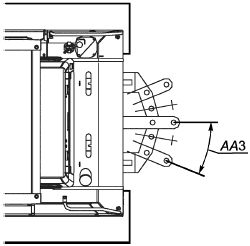
HH7 - высота сцепного устройства; HH8 - ширина тяговой серьги; LL3 - задняя проекция; LL4 - осевая проекция; АА3 - угол поворота сцепного устройства
Рисунок 21 - Размеры поворотного сцепного устройства
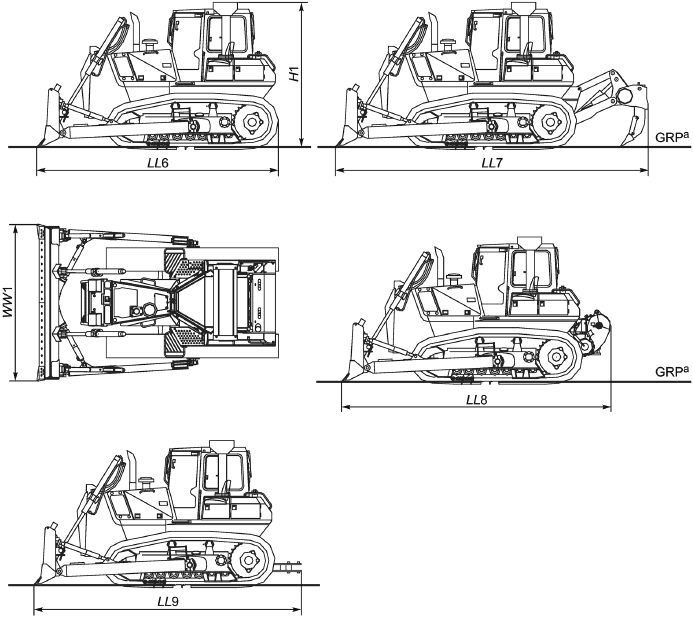
4.2.3 Общие размеры с рабочим и сменным оборудованием см. рисунок 22.
Для определения размеров см. приложение А.
|
________________
См. 3.1.10.
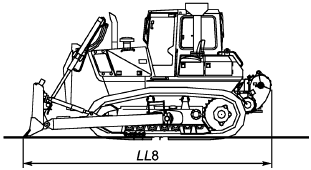
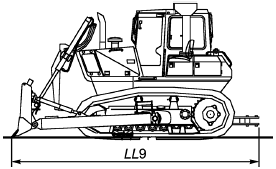
LL6 - с бульдозерным отвалом; LL7 - с бульдозерным отвалом и рыхлителем; LL8 - с бульдозерным отвалом и лебедкой; LL9 - с бульдозерным отвалом и поворотным сцепным устройством
Рисунок 22 - Общие размеры гусеничного бульдозера с рабочим и сменным оборудованием
4.3 Номенклатура оборудования
4.3.1 Термины и определения
В настоящем стандарте для описания рабочего и сменного оборудования для бульдозеров применены следующие термины и определения:
4.3.1.1 винтовой раскос (jack): Элемент изменяемой длины, обеспечивающий регулирование угла наклона или перекоса отвала.
4.3.1.2 жесткий раскос (strut): Элемент неизменной после сборки длины, предназначенный для установки заданного угла наклона или перекоса отвала.
4.3.2 Бульдозерное оборудование
См. 3.1.6 и рисунок 23
|
|
а) Неповоротный отвал | b) Поворотный отвал |
|
|
с) Полусферический отвал | d) Сферический отвал |
|
|
е) Отвал с силовым приводом поворота и перекоса | f) Отвал с амортизатором |
| |

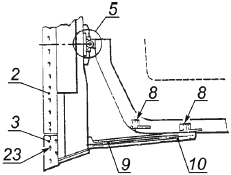





1 - толкающий брус; 2 - средняя секция ножа; 3 - концевая секция ножа; 4 - С-образная толкающая рама; 5 - шарнир поворотного отвала; 6 - опора; 7 - сферический подшипник опоры; 8 - кронштейн для перестановки раскоса; 9 - винтовой раскос механизма наклона отвала; 10 - жесткий раскос, переставляемый при повороте отвала; 11 - отвал; 12 - шарнир подвески гидроцилиндра; 13 - гидроцилиндр подъема отвала; 14 - кронштейн крепления гидроцилиндра; 15 - горизонтальный подкос; 16 - гидроцилиндр перекоса отвала; 17 - гидроцилиндр поворота отвала; 18 - трубчатая, вильчатая или цапфовая опора; 19 - амортизатор; 20 - рама механизма перекоса отвала; 21 - рама механизма поворота отвала; 22 - козырек; 23 - болты крепления ножей
Рисунок 23 - Бульдозерное оборудование
4.3.3 Рыхлитель
См. рисунок 24
|
|
а) Трехзвенный рыхлитель | b) Черырехзвенный рыхлитель |
| |
с) Рыхлитель с изменяемым наклоном зуба | |

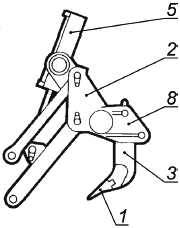
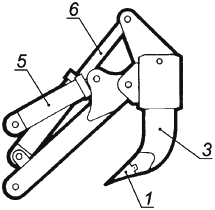
1 - наконечник зуба; 2 - тяговая серьга; 3 - зуб; 4 - рабочая балка; 5 - гидроцилиндр подъема рыхлителя; 6 - гидроцилиндр наклона зуба; 7 - рама крепления рыхлителя к бульдозеру; 8 - проушина для зуба; 9 - шкворень зуба
Рисунок 24 - Рыхлитель
4.3.4 Лебедка
См. рисунок 25.
|

1 - защитное ограждение каната; 2 - барабан для намотки каната; 3 - корпус лебедки
Рисунок 25 - Лебедка
4.3.5 Поворотное сцепное устройство
См. рисунок 26.
|
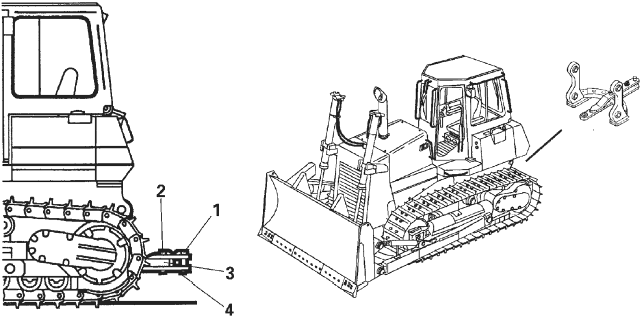
1 - палец; 2 - стопор; 3 - поворотный сектор; 4 - сцепное устройство
Рисунок 26 - Поворотное сцепное устройство
5 Технические характеристики для коммерческой документации
Нижеперечисленные термины применяются для описания технических характеристик в коммерческой документации. Единицы измерения должны быть выражены в Международной системе единиц СИ.
5.1 Двигатель
Должны быть приведены следующие характеристики:
a) Изготовитель и модель;
b) тип воспламенения: от сжатия (дизель) или с искровым зажиганием;
c) тактность: двух- или четырехтактный;
d) тип подачи воздуха: атмосферный, механический нагнетатель или турбокомпрессор;
e) число цилиндров;
f) диаметр цилиндра;
g) ход поршня;
h) рабочий объем;
i) система охлаждения (воздушная, жидкостная);
j) тип топлива;
k) полезная мощность (нетто) по ISO 9249;
l) номинальная частота вращения двигателя по ISO 9249;
m) максимальный крутящий момент при определенной частоте вращения двигателя;
n) тип стартера;
o) напряжение в системе электрооборудования.
5.2 Трансмиссия
Должны быть приведены следующие характеристики:
а) тип трансмиссии, например:
- механическая с ручным переключением с муфтой сцепления на маховике;
- с сервопереключением и гидротрансформатором;
- гидростатическая;
- электрическая;
b) число скоростей вперед и назад;
c) максимальная скорость передвижения (должен быть приведен график зависимости тягового усилия от скорости).
5.3 Гидравлическая система
5.3.1 Гидронасосы:
Должны быть приведены следующие характеристики:
a) тип;
b) подача насоса при заданном давлении и номинальной частоте вращения.
5.3.2 Гидромоторы
Должны быть приведены тип и назначение гидромоторов.
5.3.3 Давление в гидросистеме:
5.3.3.1 Рабочее давление в гидравлическом контуре.
Должно быть указано номинальное давление, создаваемое гидронасосом в каждом конкретном гидравлическом контуре.
5.3.3.2 Давление срабатывания предохранительного клапана.
Должно быть указано максимальное статическое давление в каждом конкретном гидравлическом контуре, ограниченное предохранительным клапаном при подаче не более 10% от номинальной подаче в контуре.
5.4 Заправочные емкости
Должны быть приведены следующие характеристики:
a) заправочный объем топливного бака;
b) заправочный объем картера двигателя;
c) заправочный объем в системы охлаждения;
d) заправочный объем трансмиссии;
f) заправочный объем дифференциала;
e) заправочный объем бортовой передачи;
g) заправочный объем гидросистемы.
5.5 Характеристики отвала
Должны быть указаны размеры и тип отвала, например:
a) поворотный отвал;
b) неповоротный отвал.
5.6 Массы
Должны быть указаны следующие характеристики:
a) эксплуатационная масса;
b) отгрузочная масса.
5.7 Габаритные размеры
Должны быть указаны все габаритные размеры.
5.8 Гусеничные машины
5.8.1 Управление поворотом и торможением
Указывают:
- тип тормозов (барабанные, дисковые, сухие, в масляной ванне);
- система привода (гидравлическая, механическая).
5.8.2 Бортовые передачи
Указывают:
- тип (одноступенчатая или двухступенчатая планетарная);
- передаточное число;
- система смазки.
5.8.3 Гусеницы и катки
Указывают:
- межосевое расстояние звена цепи гусениц;
- ширина башмака;
- высота грунтозацепа;
- площадь опорной поверхности [L2x2 (W4)];
- число опорных катков (с каждой стороны).
5.8.4 Среднее давление на грунт
Должно быть указано среднее давление на грунт по ISO 16754[7].
5.9 Колесные машины
5.9.1 Ведущий мост
Указывают:
- жестко закрепленный или балансирный;
- c конической главной передачей;
- дифференциал;
- с объемной гидростатической передачей;
- с планетарной бортовой передачей.
5.9.2 Рулевое управление (см. ISO 5010)
Указывают:
- ручное, гидростатическое;
- шарнирно-сочлененная рама;
- тип аварийного рулевого управления;
- технические характеристики (радиусы поворота, влево, вправо и т.д.).
5.9.3 Тормозные системы
5.9.3.1 Рабочая тормозная система
Указывают:
- тип (барабанные, дисковые, сухие, в масляной ванне);
- система привода (пневматическая, гидравлическая, пневмогидравлическая).
5.9.3.2 Запасная тормозная система
Указывают:
- тип;
- система привода.
5.9.3.3 Стояночная тормозная система
Указывают:
- тип;
- система привода.
5.9.4 Шины
Указывают:
- размер и тип;
- протектор;
- норма слойности;
размер обода.
Приложение А
(обязательное)
Размеры бульдозеров
Настоящее приложение устанавливает размерные характеристики бульдозеров и их условные обозначения.
Условное обозначение | Термин и определение | Иллюстрация |
НН1 | Высота отвала |
|
НН2 | Высота подъема |
|
НН3 | Глубина резания |
|
НН4 | Высота перекоса |
|
НН5 | Максимальная высота лебедки |
|
НН6 | Высота центра барабана лебедки | |
НН7 | Высота сцепного устройства |
|
НН8 | Ширина тяговой серьги | |
WW1 | Максимальная ширина |
|
WW2 | Ширина поворотного отвала |
|
WW3 | Ширина С-образной толкающей рамы |
|
WW4 | Рабочая ширина рыхлителя |
|
WW5 | Межцентровое расстояние между зубьями | |
LL1 | Передняя проекция |
|
LL2 | Передняя проекция поворотного отвала |
|
LL3 | Задняя проекция |
|
LL4 | Осевая проекция | |
LL6 | Максимальная длина |
|
LL7 | Максимальная длина |
|
LL8 | Максимальная длина |
|
LL9 | Максимальная длина |
|
АА1 | Угол наклона |
|
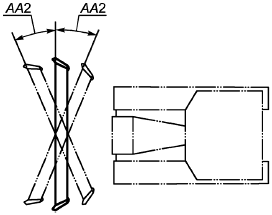
АА2 | Угол поворота отвала |
|
АА3 | Угол поворота сцепного устройства |
|












Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов межгосударственным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
ISO 5010 | IDT | ГОСТ ISO 5010-2011 "Машины землеройные. Системы рулевого управления колесных машин" |
ISO 6014 | MOD | ГОСТ 27927-88 |
ISO 6746-1 | MOD | ГОСТ 28633-90 "Машины землеройные. Определения и условные обозначения размерных характеристик. Часть 1. Базовая машина" |
ISO 6746-2 | MOD | ГОСТ 28632-90 "Машины землеройные. Определения и условные обозначения размерных характеристик. Часть 2. Рабочее оборудование" |
ISO 7457 | MOD | ГОСТ 27257-87 "Машины землеройные. Методы определения параметров поворота колесных машин" |
ISO 9249 | MOD | ГОСТ 30687-2000 "Машины землеройные. Правила испытаний двигателей. Полезная мощность" |
ISO 15550 | - | * |
* Соответствующий межгосударственный стандарт отсутствует. | ||
Примечание - В настоящей таблице использованы следующие условные обозначение степени соответствия стандартов: - IDT - идентичный стандарт; - MOD - модифицированные стандарты. | ||
Библиография
[1] | ISO 3450:2011 | Earth-moving machinery - Wheeled or high-speed rubber-tracked machines - Performance requirements and test procedures for brake systems (Машины землеройные. Колесные или высокоскоростные с резиновыми гусеницами машины. Эксплуатационные требования и методики испытаний тормозных систем) |
[2] | ISO 6165:2012 | Earth-moving machinery - Basic types - Identification and terms and definitions (Машины землеройные. Основные типы. Идентификация, термины и определения) |
[3] | ISO 6016:2008 | Earth-moving machinery - Methods of measuring the masses of whole machines, their equipment and components (Машины землеройные. Методы измерения массы машин в целом, их рабочего оборудования и узлов) |
[4] | ISO 7464:1983 | Earth-moving machinery - Method of test for the measurement of drawbar pull (Машины землеройные. Метод испытаний по определению тяговой характеристики) |
[5] | ISO 10265:2008 | Earth-moving machinery - Crawler machines - Performance requirements and test procedures for braking systems (Машины землеройные. Машины на гусеничном ходу. Эксплуатационные требования и методы испытаний тормозных систем) |
[6] | ISO 10266:1992 | Earth-moving machinery - Determination of slope limits for machine fluid systems operation - Static test method (Машины землеройные. Определение предельных значений угла наклона при эксплуатации гидравлических систем машин. Статический метод испытаний) |
[7] | ISO 16754:2008 | Earth-moving machinery - Determination of average ground contact pressure for crawler machines (Машины землеройные. Определение среднего значения давления на землю машин на гусеничном ходу) |
УДК 621.869.4-788:629.614:006.354 | МКС | 53.100 | IDT |
01.040.53 | |||
Ключевые слова: машины землеройные, бульдозеры, терминология, коммерческая документация | |||
Электронный текст документа
и сверен по:
, 2020
{kind=link}