ФЕДЕРАЛЬНОЕ АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ

НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ГОСТ Р
60.6.0.2—
2023
(МЭК 63048:2020)
Роботы и робототехнические устройства
МОБИЛЬНЫЕ ДИСТАНЦИОННО УПРАВЛЯЕМЫЕ СИСТЕМЫ ДЛЯ ПРИМЕНЕНИЯ НА ОБЪЕКТАХ ИСПОЛЬЗОВАНИЯ АТОМНОЙ ЭНЕРГИИ
Общие требования
(IEC 63048:2020, Mobile remotely controlled systems for nuclear and radiological applications — General requirements, MOD)
Издание официальное
Москва
Российский институт стандартизации
2023
ГОСТ Р 60.6.0.2—2023
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным автономным научным учреждением «Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики» (ЦНИИ РТК) на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 «Робототехника»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 5 октября 2023 г. № 1079-ст
4 Настоящий стандарт является модифицированным по отношению к международному стандарту МЭК 63048:2020 «Мобильные дистанционно управляемые системы для ядерных и радиологических применений. Общие требования» (IEC 63048:2020 «Mobile remotely controlled systems for nuclear and radiological applications — General requirements», MOD) путем внесения технических отклонений, объяснение которых приведено во введении к настоящему стандарту.
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5—2012 (пункт 3.5) и для увязки с наименованиями, принятыми в существующем комплексе национальных стандартов Российской Федерации.
Сопоставление структуры настоящего стандарта со структурой примененного в нем международного стандарта приведено в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. № 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
© IEC,2020 ©Оформление. ФГБУ «Институт стандартизации», 2023
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
II
ГОСТ Р 60.6.0.2—2023
Содержание
1 Область применения..................................................................1
2 Термины и определения................................................................1
3 Сокращения.........................................................................2
4 Общие сведения......................................................................3
4.1 Рабочая среда.....................................................................3
4.2 Структура МДУС...................................................................3
4.3 Анализ рисков и меры по обеспечению безопасности....................................4
5 Общие требования....................................................................5
5.7 Общие положения.................................................................5
5.2 Требования безопасности...........................................................5
5.3 Функциональные требования........................................................7
5.4 Эксплуатационные требования.......................................................9
5.5 Требования к проведению испытаний.................................................10
6 Верификация и валидация............................................................10
6.7 Общие положения................................................................10
6.2 Методы верификации и валидации...................................................10
6.3 Требуемые верификация и валидация................................................10
Приложение А (справочное) Основное назначение мобильной дистанционно управляемой системы.....................................................11
Приложение В (справочное) Методы верификации и валидации требований безопасности и контрмер..................................................13
Приложение ДА (справочное) Сопоставление структуры настоящего стандарта со структурой примененного в нем международного стандарта..................17
Библиография........................................................................18
III
ГОСТ Р 60.6.0.2—2023
Введение
Требования стандартов комплекса ГОСТ Р 60 распространяются на роботы и робототехнические устройства. Их целью является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов, узлов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: «Общие положения, основные понятия, термины и определения», «Технические и эксплуатационные характеристики», «Безопасность», «Виды и методы испытаний», «Механические интерфейсы», «Электрические интерфейсы», «Коммуникационные интерфейсы», «Методы моделирования и программирования», «Методы построения траектории движения (навигация)», «Конструктивные элементы». Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации — промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам, сервисным мобильным роботам, а также к морским робототехническим комплексам.
Настоящий стандарт относится к тематической группе «Общие положения, основные понятия, термины и определения» и распространяется на сервисные мобильные роботы, предназначенные для применения на ядерных объектах. Настоящий стандарт является модифицированным по отношению к международному стандарту МЭК 63048:2020, разработанному рабочей группой РГ18 «Мобильные дистанционно управляемые системы для ядерных и радиологических применений» технического комитета МЭК/ТК 45 «Ядерное приборостроение».
В настоящее время существует большое разнообразие роботов, применяемых на объектах использования атомной энергии, среди которых следует отметить многофункциональные мобильные робототехнические комплексы для обследования и технического обслуживания системы водяного охлаждения первого контура атомной станции; роботы с изменяемой конфигурацией, используемые в системе дистанционного обследования первичной защитной оболочки ядерного реактора; роботы для обследования крышки корпуса и днища реактора; подводные мобильные роботы, которые обнаруживают и удаляют незакрепленные детали внутри корпуса реактора; подводные ползающие и плавающие роботы для обследования и технического обслуживания подающей трубы парогенератора; роботы, предназначенные для радиационной и химической разведки и мониторинга; двурукие тяжелые роботы для демонтажа атомных станций.
В этой связи возникает необходимость разработки стандартов, охватывающих проектирование, изготовление и использование мобильных дистанционно управляемых систем для применения на объектах использования атомной энергии, способных выполнять разные виды работ, например осуществлять контроль целостности ядерных установок, ремонт ядерных установок, мониторинг возникновения каких-либо отклонений или аварий, а также дезактивирование и демонтаж объектов использования атомной энергии.
Настоящий стандарт устанавливает общие требования к мобильным дистанционно управляемым системам для применения на объектах использования атомной энергии. Детальную проработку данных общих требований должны осуществить разработчики и изготовители таких систем, чтобы обеспечить необходимую поддержку пользователям их изделий.
В настоящий стандарт внесены следующие технические отклонения по отношению к МЭК 63048:2020:
- настоящий стандарт оформлен с соблюдением правил, установленных в ГОСТ Р 1.5, в соответствии с ГОСТ Р 1.7—2014 (пункт 7.2);
- в раздел 1 добавлен абзац, конкретизирующий понятие объектов использования атомной энергии;
- в разделе 3 определения терминов, связанных с безопасностью, приведены в соответствии с ГОСТ IEC 60050-903—2017; добавлены определения терминов «анализ рисков», «вред» и «определение степени риска»;
- терминологические статьи расположены в алфавитном порядке русского языка для обеспечения соответствия требованиям ГОСТ 1.5—2001;
- в приложение А добавлен пункт А.2.8 «Дезактивация объектов атомной энергии»;
- библиография оформлена в соответствии с требованиями ГОСТ 1.3—2014; в нее не включены справочные ссылки на стандарты АСТМ, не имеющие прямого отношения к мобильным дистанционно управляемым системам для применения на объектах использования атомной энергии;
- изменены отдельные фразы (слова, значения показателей, ссылки). Все дополнения и изменения в тексте стандарта выделены курсивом.
IV
ГОСТ Р 60.6.0.2—2023
(МЭК 63048:2020)
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
МОБИЛЬНЫЕ ДИСТАНЦИОННО УПРАВЛЯЕМЫЕ СИСТЕМЫ ДЛЯ ПРИМЕНЕНИЯ НА ОБЪЕКТАХ ИСПОЛЬЗОВАНИЯ АТОМНОЙ ЭНЕРГИИ
Общие требования
Robots and robotic devices. Mobile remotely controlled systems for application at facilities using nuclear energy. General requirements
Дата введения — 2024—01—01
1 Область применения
Настоящий стандарт устанавливает общие требования к мобильным дистанционно управляемым системам (МДУС), предназначенным для применения на объектах использования атомной энергии при проведении и автоматизации таких работ, как проверка работоспособности, ремонт узлов, работа с радиоактивными материалами, мониторинг физических условий и интенсивности доз излучения в конкретных областях (в приложении А приведена более подробная информация об основном назначении МДУС).
МДУС используют в областях, куда человеку доступ затруднен или невозможен при выполнении повседневной работы, при переходных состояниях и аварийных ситуациях, а также для ликвидации последствий аварий на объектах использования атомной энергии.
Под объектами использования атомной энергии в настоящем стандарте понимаются атомные станции, сооружения и комплексы с промышленными, экспериментальными и исследовательскими ядерными реакторами, а также пункты хранения, хранилища ядерных материалов, радиоактивных веществ и радиоактивных отходов.
Данные общие требования охватывают высокоуровневые эксплуатационные требования, относящиеся к датчикам, контрольным устройствам, управляющим устройствам, средствам сопряжения, методам модулирования и методам верификации в нормальных условиях или в экстремальных условиях, таких как среды с высоким уровнем радиации, высокой температурой и высокой влажностью.
2 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
2.7___________________________________________________________________________________________________________
анализ рисков (risk analysis): Систематическое использование имеющейся информации для выявления опасностей и оценки риска.
[ГОСТ1ЕС 60050-903—2017, статья 903-01-08]
2.2
безопасность (safety): Отсутствие неприемлемого риска.
[ГОСТ IEC 60050-903—2017, статья 903-01-19]_____________________________________________
2.3______________________________________________________________________________________________________ вред (harm): Физическая травма или ущерб, нанесенные лицам, имуществу или живым животным. [ГОСТ/ЕС 60050-903—2017, статья 903-01-01]
Издание официальное
1
ГОСТ Р 60.6.0.2—2023
2.4 встроенная система контроля и диагностики; ВСКД (built-in control/diagnostics system; BCDS): Специализированные средства диагностирования (контроля), являющиеся составной частью бортовой системы управления МДУС и предназначенные для постоянной проверки состояния МДУС.
2.5
дистанционное управление (remote control): Управление МДУС в реальном времени на расстоянии и под непосредственным визуальным контролем со стороны оператора.
[Адаптировано из ГОСТ Р 60.6.3.1—2019, статья 2.3]
2.6 задание (mission): Предметное описание главной задачи, для решения которой предназначена МДУС.
2.7 мобильная дистанционно управляемая система; МДУС (mobile remotely controlled system; MRCS): Мобильная робототехническая система, предназначенная для обслуживания объектов использования атомной энергии, которая дистанционно управляется оператором и состоит из подсистем, модулей или узлов.
Пример — Подсистемами, модулями или узлами являются, например, механические и электриче-ские/электронные средства управления, связи (между оператором и роботом и некоторыми подсистемами, модулями и узлами робота), осветительная аппаратура и, возможно, аудиоподсистемы, модули или узлы, подсистемы, модули и узлы для взятия проб и контроля обстановки, для проведения фото-или видеосъемок окружающей обстановки, для определения состояния воздуха или поверхностей радиоактивных материалов, наличия токсичных газов и частиц, например асбеста, и выполнения других заданных действий под управлением оператора.
2.8______________________________________________________________________________________________________
опасность (hazard): Потенциальный источник вреда.
[ГОСТ1ЕС 60050-903—2017, статья 903-01-02]
2.9______________________________________________________________________________________________________
оператор (operator): Лицо, уполномоченное запускать, контролировать и останавливать выполнение заданной операции МДУС.
[Адаптировано из ГОСТ Р 60.0.0.4—2023/ИСО 8373:2021, статья 3.11]
2.10_____________________________________________________________________________________________
определение степени риска (risk evaluation): Процедура, основанная на анализе риска, имеющая целью определение допустимости риска.
[ГОСТ1ЕС 60050-903—2017, статья 903-01-09]___________________________________________
2.11_____________________________________________________________________________________________________
оценка риска (risk assessment): Общий процесс, включающий в себя анализ риска и определение степени риска.
[ГОСТ1ЕС 60050-903—2017, статья 903-01-10]___________________________________________
2.12_____________________________________________________________________________________________ риск (risk): Сочетание вероятности возникновения ущерба и тяжести этого ущерба.
[ГОСТ1ЕС 60050-903—2017, статья 903-01-07]___________________________________________ 2.13_____________________________________________________________________________________________ робот (robot): Программируемый исполнительный механизм, обладающий определенным уровнем автономности и предназначенный для выполнения перемещения, манипулирования или позиционирования.
[ГОСТ Р 60.0.0.4—2023/ИСО 83 73:2021, статья 3.1]_________________________________________
2.14 сценарий (scenario): Возможная последовательность взаимодействий.
Примечание —См. [1], 3.10.
3 Сокращения
В настоящем стандарте применены следующие сокращения: ВСКД — встроенная система контроля и диагностики;
МДУС — мобильная дистанционно управляемая система;
ЧМИ — человеко-машинный интерфейс.
2
ГОСТ Р 60.6.0.2—2023
4 Общие сведения
4.1 Рабочая среда
4.1.1 Общие положения
МДУС следует использовать для выполнения заданий на объектах использования атомной энергии, куда доступ людей затруднен или невозможен. Рабочую среду на объектах использования атомной энергии идентифицируют по условиям эксплуатации и рабочим зонам, включая приведенные ниже факторы, но не ограничиваясь ими.
4.1.2 Атмосферные условия:
- радиоактивные газы и аэрозоли, радиоактивная пыль;
- высокая температура и высокая влажность;
- токсичные и взрывоопасные газы;
- подводная или затопленная среда.
4.1.3 Структурная среда:
- узкие и ограниченные пространства, препятствующие доступу людей;
- зоны на большой высоте с риском падения;
- наличие препятствий с риском столкновения;
- зоны с уклоном, например лестницы;
- неровные проходы, включая решетчатые настилы;
- зоны, где требуются антропоморфные манипуляторы, например для выполнения действий с дверьми и затворами.
Данные факторы рабочей среды должны быть рассмотрены применительно к выполняемому МДУС заданию, как показано в приложении А.
МДУС должны выполнять поставленные задания в разных рабочих средах с участием или без участия человека и должны быть адаптированы к работе в недетерминированной инфраструктуре объектов использования атомной энергии.
Безопасность операторов, объектов использования атомной энергии и МДУС должна быть подтверждена для конкретной рабочей среды.
4.2 Структура МДУС
МДУС или оператор является субъектом, выполняющим поставленное задание, в то время как объект использования атомной энергии является объектом, на котором данное задание выполняется.
Как субъект, МДУС выполняет поставленное задание относительно объекта автономно или совместно с оператором.
Любые проблемы, которые могут возникнуть при выполнении задания, должны решаться МДУС и оператором, но окончательное решение принимает оператор.
Соответственно при планировании выполнения поставленного задания оператор должен минимизировать возникновение неожиданных проблем, включая использование моделирования.
МДУС, как субъект, выполняющий поставленное задание, имеет следующую структуру.
МДУС состоит из двух подсистем: подчиненной и главной, как показано на рисунке 1. Подчиненная подсистема предназначена для работы в недоступной для оператора зоне или в опасной зоне. Главная подсистема располагается в безопасной зоне и используется оператором для контроля за работой подчиненной подсистемы.
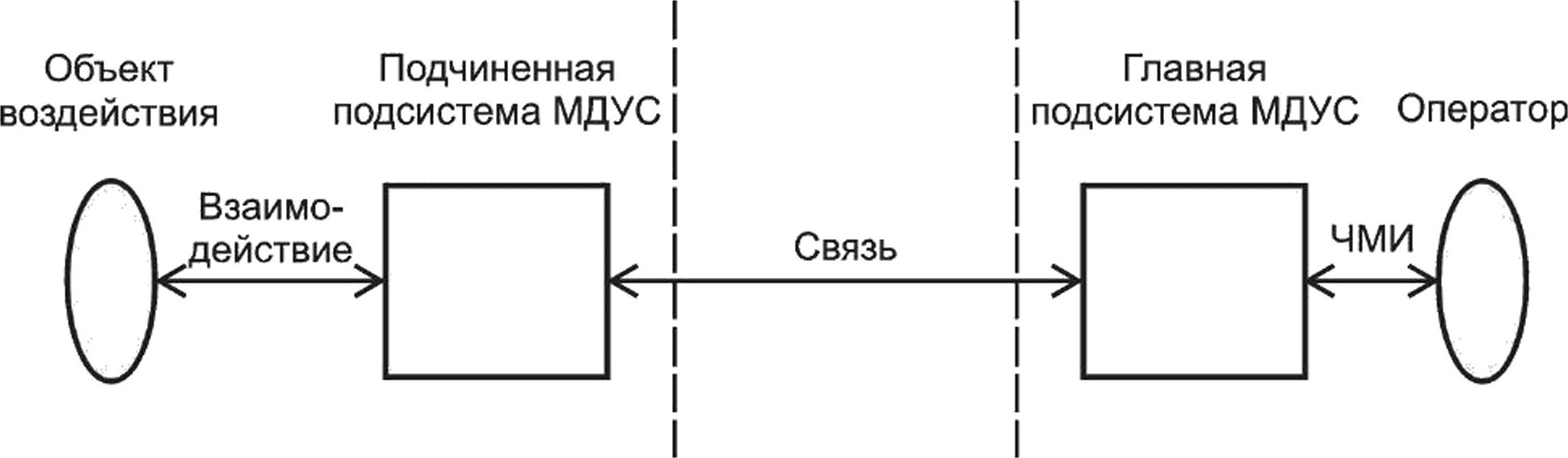
Рисунок 1 — Структура МДУС
3
ГОСТ Р 60.6.0.2—2023
Две подсистемы расположены вдали друг от друга, и поэтому для обмена необходимой информацией между ними требуются средства связи.
Функциями подчиненной подсистемы, показанными на рисунке 2, являются:
- функция восприятия, предназначенная для сбора информации, необходимой для выполнения поставленного задания;
- функция передвижения, предназначенная для размещения подчиненной подсистемы в целевой зоне, где должно быть выполнено поставленное задание;
- функция манипулирования, предназначенная для перемещения инструмента в целевую позицию и придания ему желаемого пространственного расположения для работы с объектом;
- функция локального управления, предназначенная для управления функциями восприятия, манипулирования и передвижения, а также для обмена информацией с главной подсистемой;
- функция связи, предназначенная для приема команд управления от главной подсистемы и передачи сенсорной информации и данных о состоянии подчиненной подсистемы на главную подсистему;
- функция питания, предназначенная для обеспечения подчиненной подсистемы источниками питания или энергии.
Функциями главной подсистемы, показанными на рисунке 2, являются:
- ЧМИ, предназначенный для приема вводимых оператором команд и предоставления оператору комплексной информации об условиях окружающей среды и состоянии подчиненной подсистемы;
- функция дистанционного управления, предназначенная для преобразования команд оператора в форму управляющих команд, воспринимаемых подчиненной подсистемой;
- функция связи, предназначенная для передачи команд управления на подчиненную подсистему и прием данных от подчиненной подсистемы;
- функция питания, предназначенная для обеспечения главной подсистемы источниками питания или энергии.
Подчиненная Главная
подсистема подсистема



Рисунок 2 — Функции МДУС
4.3 Анализ рисков и меры по обеспечению безопасности
Для предотвращения или снижения рисков должны быть предусмотрены необходимые меры обеспечения безопасности.
Причинами возникновения рисков могут быть различные факторы, включая следующие, но не ограничиваясь ими:
- атмосферные условия, см. 4.1.2;
- структурная среда, см. 4.1.3 (например, вероятность падения или опрокидывания МДУС);
- неправильные действия оператора;
- дефектное или поврежденное электронное оборудование, которое может вызвать электрический удар или возгорание;
- дефекты или неисправность в цепи управления, которые могут вызвать нарушение работоспособности МДУС;
4
ГОСТ Р 60.6.0.2—2023
- дефекты или сбои в электрической цепи, которые могут вызвать нарушение питания и работоспособности МДУС;
- разрыв целостности цепи из-за скользящего контакта или катящегося контакта, который может вызвать нарушение работы функции безопасности или механические дефекты;
- электрические помехи, такие как влияния электромагнитных полей, статического электричества и радиочастотные помехи, которые могут быть внешними и внутренними, вызывая нарушение работоспособности оборудования;
- преднамеренные/непреднамеренные действия третьих лиц, направленные на повреждение оборудования и/или нарушение связи между главной и подчиненной подсистемами МДУС.
Под мерами по обеспечению безопасности понимается комбинация мер, принимаемых в отношении вышеназванных рисков, а также защитные меры, которые необходимо предусмотреть пользователю.
Данные меры по обеспечению безопасности следует рассмотреть на этапах системного проектирования и разработки для того, чтобы снизить риски.
Надлежащие меры по обеспечению безопасности должны быть подготовлены на основе результатов оценки риска.
Также должны быть рассмотрены средства защиты, к которым относятся устройства обеспечения безопасности и средства распознавания, и технологический процесс.
5 Общие требования
5.1 Общие положения
МДУС следует проектировать и изготавливать так, чтобы обеспечить соответствие требованиям к выполнению поставленных заданий с учетом факторов рабочей среды, определенных в 4.1.
Данные требования включают:
-требования безопасности (см. 5.2);
- функциональные требования (см. 5.3);
- эксплуатационные требования (см. 5.4);
- требования к испытаниям (см. 5.5).
5.2 Требования безопасности
5.2.1 Общие положения
МДУС разрабатывают для безопасного выполнения задания в рабочей среде, определенной в 4.1. Безопасность МДУС должна быть верифицирована относительно трех составляющих:
- ограничение уровня риска, который может причинить вред здоровью людей в течение всего периода эксплуатации МДУС, включая подготовительные работы (например, подготовку, монтаж, установку и наладку главной подсистемы), выполнение основных работ (например, дистанционная работа мобильной платформы, дистанционное управление манипулятором) и работы после завершения функционирования (например, возврат в исходную позицию, дезактивирование, техническое обслуживание и ремонт МДУС);
- ограничение уровня риска нанесения повреждений внешней среде. МДУС должна быть безопасно возвращена на исходную позицию без нанесения каких-либо повреждений внешней среде во время выполнения задания;
- защита МДУС от опасностей рабочей среды. МДУС должна иметь возможность безопасного возвращения на исходную позицию без повреждения во время выполнения задания.
В зависимости от конкретной рабочей среды следует учитывать специфические требования безопасности. В приложении В представлены методы верификации соответствия требованиям безопасности, обеспечивающие возможность применения конкретной МДУС в среде выполнения поставленного задания. Изготовитель должен предоставить технические условия и другую необходимую информацию.
5.2.2 Требования по предотвращению травмирования людей
МДУС должна быть спроектирована так, чтобы гарантировать безопасность персонала в течение всего периода ее эксплуатации. Уровень риска для персонала, работающего с МДУС, должен быть снижен до уровня ниже допустимого предела. Если применимо, то необходимо рассмотреть следующие требования, но не ограничиваться ими:
- снижение всех возможных рисков, указанных в 4.1, до уровня ниже допустимого предела, если эти риски достигли уровня, на котором персонал может пострадать;
5
ГОСТ Р 60.6.0.2—2023
- предупреждение персонала о рисках при подготовке, монтаже, эксплуатации, возвращении, дезактивировании, осмотре, техническом обслуживании, ремонте или использовании МДУС для других целей;
- четкое определение и документирование способов эксплуатации МДУС. Следует определить возможные риски для каждого способа эксплуатации и пути их снижения;
- отсутствие причинения вреда персоналу при столкновении или контакте с МДУС с учетом ее физических (скорость, развиваемые усилия) или электрических характеристик;
- гарантирование безопасности при ремонте или техническом обслуживании МДУС. Для снижения риска рекомендуется использовать модульную конструкцию, которая позволяет пользователю просто заменить вышедший из строя модуль;
- препятствование загрязнению МДУС радиоактивными веществами;
-дезактивирование МДУС после завершения выполнения задания, чтобы обслуживающий персонал мог выполнить техническое обслуживание или ремонт после дезактивирования;
- надежное закрепление всех элементов МДУС и исключение выпадения отдельных элементов, приводящих к травмированию персонала.
5.2.3 Требования по предотвращению повреждения объектов использования атомной энергии
Уровень потенциального риска для объектов использования атомной энергии при работе МДУС должен быть снижен до уровня ниже допустимого предела. Если возможно, при планировании выполнения задания следует рассмотреть следующие вопросы, но не ограничиваться ими:
- предотвращение повреждения конструкций объекта при падении или опрокидывании МДУС;
- предотвращение повреждения конструкций объекта в случае неожиданного столкновения МДУС с данными конструкциями. Рабочая скорость передвижения МДУС должна быть ограничена в достаточной степени, чтобы снизить возможный риск;
- предотвращение повреждения конструкций объекта при случайном контакте с МДУС, а контактное давление на конструкцию было ниже допустимого уровня.
При выполнении задания следует предпринимать следующие действия:
- не допускать, чтобы МДУС вырабатывала какие-либо вещества, которые могут повредить конструкции или нарушить нормальный режим работы ядерного объекта. При манипулировании предметами необходимо не допускать их выпадение из захватного устройства;
- для обнаружения посторонних предметов следует проводить осмотр рабочей зоны;
- при обнаружении посторонних предметов их следует удалять из рабочей зоны.
5.2.4 Требования по предотвращению повреждения МДУС
МДУС должна выполнить поставленное задание безопасно, не причинив какого-либо повреждения вплоть до возвращения на заранее заданную позицию. В случае возникновения неисправности выполнение задания следует прекратить. МДУС следует вернуть на заранее заданную позицию для ремонта или она должна быть безопасно остановлена в текущей позиции, если возвращение невозможно. МДУС следует проектировать так, чтобы обеспечить надлежащие меры безопасности и минимизировать ухудшение рабочих характеристик при функционировании в рабочей среде, определенной в 4.1.
Уровень риска для МДУС должен быть снижен до уровня ниже допустимого предела. МДУС следует проектировать, изготавливать и эксплуатировать с учетом следующих требований, но не ограничиваясь ими:
- обеспечение резервирования и диверсификации для снижения риска в случае сбоя, ухудшения рабочих характеристик и неисправности устройства;
- обеспечение радиационной выносливости или стойкости МДУС;
- обеспечение водонепроницаемости подсистемы, модуля или узла МДУС, при необходимости;
- предотвращение ухудшения характеристик подсистемы, модуля или узла МДУС из-за запыленности рабочей среды, при необходимости;
- минимизация воздействия вибрации на подсистему, модуль или узел МДУС, а при необходимости следует применить меры виброзащиты;
- обеспечение механической прочности и уменьшение трения подсистемы, модуля или узла МДУС, при необходимости;
- обеспечение соответствия размеров и формы подсистемы, модуля или узла МДУС условиям выполнения поставленного задания;
- обеспечение надлежащей балансировки центра масс МДУС, чтобы избежать опрокидывания. При необходимости форма или центр масс МДУС должны иметь возможность регулировки;
- оснащение МДУС контрольно-измерительными устройствами для выявления возможных рисков.
6
ГОСТ Р 60.6.0.2—2023
5.3 Функциональные требования
5.3.1 Общие положения
МДУС должна обладать функциями, необходимыми для выполнения поставленного задания.
Функциональные требования, установленные в данном подразделе, не обязательно относятся ко всем типам МДУС, а каждое требование выборочно применяют к соответствующему типу МДУС. Это означает, что к каждому требованию, установленному в данном подразделе, могут быть добавлены слова «если применимо» или «если необходимо».
5.3.2 Сенсорная система
Функции сенсорной системы следует выбирать в зависимости от задания среди следующих функций, но не ограничиваясь ими.
МДУС должна получать следующую сенсорную информацию, необходимую для передвижения и манипулирования:
- визуальную и акустическую;
- о расстоянии до объекта;
- о своей позиции;
- об ориентации и положении;
- о контакте или усилии.
МДУС должна получать следующую сенсорную информацию, необходимую для идентификации характеристик рабочей среды:
- о мощности дозы радиационного излучения;
- о температуре, влажности и давлении;
- об утечке газов;
- об утечке паров жидкости и воды;
- необходимую для проведения неразрушающего контроля.
5.3.3 Передвижение
Функции передвижения следует выбирать в зависимости от задания среди следующих функций, но не ограничиваясь ими:
- контроля скорости для минимизации рисков, вызванных столкновениями;
- аварийной остановки МДУС в опасных ситуациях;
- безопасной остановки МДУС в непредусмотренных ситуациях;
- безопасного поддержания текущего пространственного расположения при неожиданном отключении источника питания;
- обхода препятствий для объезда или прохода мимо препятствий в рабочей зоне;
- устойчивости для недопущения опрокидывания при движении по неровной поверхности, такой как лестницы, уклоны или бугры;
- переворота для возврата МДУС в рабочее положение из опрокинутого состояния;
- поворота для реализации движения МДУС в нужном направлении;
- обеспечения повышенной проходимости и надлежащей силы тяги для обеспечения независимости МДУС от состояния поверхности перемещения;
- безопасного автоматического завершения работы при нарушении связи между главной и подчиненной подсистемами МДУС.
5.3.4 Манипулирование
Функции манипулирования следует выбирать в зависимости от задания среди следующих функций, но не ограничиваясь ими:
- функция аварийной остановки, необходимая для остановки манипулятора в опасных ситуациях;
- функция безопасной остановки, необходимая для остановки манипулятора в непредусмотренных ситуациях;
- функция безопасного поддержания текущего пространственного расположения при неожиданном отключении источника питания;
- функция возвращения, необходимая для перемещения манипулятора в исходное положение после выхода из непредусмотренной ситуации;
- функция управления движением, необходимая для точного управления по положению и скорости;
- функция недопущения столкновений, необходимая для обеспечения отсутствия соударений манипулятора с препятствиями;
- функция амортизации, необходимая для минимизации повреждений при соударении;
7
ГОСТ Р 60.6.0.2—2023
- функция обеспечения надлежащей степени свободы, необходимая для выполнения поставленного задания;
- функция обеспечения работы с полезной нагрузкой, необходимая для реализации манипуляций с намеченным предметом;
- функция обеспечения безопасного автоматического завершения работы при нарушении связи между главной и подчиненной подсистемами МДУС.
5.3.5 Локальное и дистанционное управление
Функции локального и дистанционного управления следует выбирать в зависимости от задания среди следующих функций, но не ограничиваясь ими.
В системе локального управления рекомендуется реализовать следующие функции:
- остановки подчиненной подсистемы в аварийных ситуациях;
- управления МДУС по положению или по скорости;
- включения датчиков и обработки собранной информации;
- приостановки работы при временной потере связи между главной подсистемой и подчиненной подсистемой;
- ВСКД для контроля состояния МДУС и передачи сообщения об ошибке в главную подсистему в случае возникновения ошибки;
- информирования главной подсистемы о состоянии подчиненной подсистемы.
В системе локального управления и/или в системе дистанционного управления следует реализовать функцию сохранения траектории перемещения мобильной платформы/манипулятора и/или истории работы МДУС.
В системе дистанционного управления рекомендуется реализовать следующие функции:
- немедленной остановки МДУС;
- ввода команд оператором и вывода для оператора собранной информации из подчиненной подсистемы;
- загрузки заранее определенных планов выполнения задания;
- конфигурирования параметров.
5.3.6 Человеко-машинный интерфейс
Функции ЧМИ следует выбирать в зависимости от задания среди следующих функций, но не ограничиваясь ими:
- предоставления мультимодальной информации, чтобы оператор мог легко распознать состояние МДУС и рабочей среды;
- легкого и интуитивно понятного ввода команд;
- вывода сообщений об ошибках для оператора;
- предупреждения об опасности в рабочей среде или сигнализации об аварийном состоянии подчиненной подсистемы;
- отображения траектории перемещения мобильной платформы/манипулятора и/или истории работы МДУС;
- отображения направляющей траектории перемещения подчиненной подсистемы в заданную позицию;
- отображения энергопотребления, уровня заряда батареи или остающегося запаса топлива;
- отображения энергопотребления и остающегося запаса мощности.
5.3.7 Система связи
Функции системы связи следует выбирать в зависимости от задания среди следующих функций, но не ограничиваясь ими:
- выбора частоты обмена информацией в зависимости от того, насколько срочно следует сообщать об изменениях, происходящих в рабочей среде;
- выбора частоты обмена информацией в зависимости от того, насколько срочно следует передавать команды оператора подчиненной подсистеме;
- выбора полосы частот канала связи для обеспечения передачи всех данных в каждом сеансе связи, включая команды управления, сенсорную информацию и аудио/видеоданные;
- защищенности системы связи для обеспечения минимального влияния радиопомех и кибератак;
- резервирования системы связи для обеспечения разнесения команд аварийной остановки при возникновении угрозы полной или частичной потери связи. Система связи должна стабильно функционировать во время работы МДУС без потери связи. Если потеря связи произошла, то МДУС должна это определить и немедленно остановить движение;
8
ГОСТ Р 60.6.0.2—2023
- обеспечения разных соединений с несколькими МДУС, например «1-к-л» (многоабонентская связь) или «л-к-л» (групповая связь);
- использования проводной или беспроводной среды передачи.
5.3.8 Источник питания
Функции источника питания следует выбирать в зависимости от задания среди следующих функций, но не ограничиваясь ими:
- измерения и информирования оператора об энергопотреблении и остающемся запасе мощности. Если остающийся запас мощности оказывается ниже допустимого уровня, то МДУС должна вернуться в заранее заданную позицию или прекратить движение;
- обеспечения устойчивой подачи энергии от источника питания потребителям во время работы МДУС. Если соединение с источником питания разрывается, то МДУС должна это определить и немедленно прекратить движение.
В МДУС может быть предусмотрен дополнительный источник питания для случая неожиданного разрыва соединения с основным источником. В этом случае вместо прекращения движения МДУС должна переключиться на дополнительный источник питания.
5.4 Эксплуатационные требования
5.4.1 Эксплуатационные требования к МДУС
В процессе эксплуатации МДУС должна быть обеспечена минимизация воздействия потенциальных рисков до, в процессе и после выполнения задания.
До начала выполнения задания следует выполнить следующие действия:
- МДУС должна быть безопасно доставлена и размещена на исходной позиции;
- все функции МДУС должны быть протестированы на их работоспособность;
-должен быть проведен анализ поставленного задания и связанной с ним рабочей среды. Оператор должен изучить задание и функции МДУС, которые потребуются на каждой стадии его выполнения.
При предварительном рабочем тестировании могут быть использованы контроллер пульта обучения, контроллер локальной системы управления или контроллер дистанционной системы управления. Информация о подключенном контроллере должна быть четко отображена для оператора.
Перед началом работы к МДУС следует подключить все необходимые ресурсы, которые могут быть предоставлены объектом использования атомной энергии или могут быть собственными ресурсами МДУС. К необходимым ресурсам для выполнения задания относятся следующие, но не ограничиваются ими:
- источник питания;
- средства освещения;
- средства связи;
- источники подачи сжатого воздуха.
Все задания должны выполняться в полностью воспринимаемой МДУС обстановке.
МДУС должна выполнять задание в соответствии с полученной текущей информацией о рабочей среде. Если данная информация не получена, то работа МДУС должна быть приостановлена.
В процессе выполнения задания следует записывать историю его выполнения. Если возникает непредвиденная ситуация, то работа должна быть приостановлена. После ликвидации непредвиденной ситуации последнее состояние из записанной истории выполнения задания может быть восстановлено. Непредвиденные ситуации включают следующие, но не ограничиваются ими:
- отключение питания;
- потерю связи;
- остановку системы управления.
Задание следует выполнять с привлечением надлежащего числа операторов, чтобы снизить вероятность ошибки, связанной с человеческим фактором.
Если МДУС теряет работоспособность при выполнении задания, то МДУС должна быть перемещена или возвращена так, чтобы не помешать выполнению других работ.
После завершения выполнения задания необходимо провести дезактивацию МДУС перед ее проверкой, хранением и повторным использованием.
После завершения выполнения задания МДУС следует хранить в надлежащих условиях, чтобы предотвратить ухудшение ее характеристик из-за факторов внешней среды.
При длительном хранении необходимо периодически осуществлять техническое обслуживание и проверку работоспособности МДУС.
9
ГОСТ Р 60.6.0.2—2023
5.4.2 Планирование и моделирование выполнения задания
Перед началом выполнения задания следует провести планирование и моделирование его выполнения, а также подготовку операторов.
При планировании выполнения задания необходимо рассмотреть функции МДУС, рабочую среду и сценарии выполнения.
Моделирование следует проводить в виртуальной среде для предотвращения ошибок операторов и повышения их профессионального уровня. На основании моделирования можно оценить время выполнения задания.
Подготовку операторов следует проводить в соответствии с планом обучения, подготовленным на основе сценариев выполнения задания.
5.5 Требования к проведению испытаний
Испытания МДУС следует проводить перед началом выполнения задания.
Для проведения испытаний МДУС необходимо разработать план проведения испытаний с учетом следующих факторов, но не ограничиваясь ими:
- конструктивные особенности объекта;
- атмосферные условия на объекте (температура, влажность, уровень радиоактивности, наличие химических веществ, газов и т. д.);
-длительность выполнения задания;
- способ возвращение МДУС с объекта в случае поломки.
МДУС следует испытывать в соответствии с разработанным планом проведения испытаний.
6 Верификация и валидация
6.1 Общие положения
Изготовитель МДУС должен провести верификацию и валидацию конструкции и изготовления МДУС, включая соответствующие защитные устройства, в соответствии с требованиями, определенными в разделе 5.
Кроме того, следует выполнить оценку риска, чтобы идентифицировать риски, которые можно разумно предвидеть и проверить наличие надлежащих контрмер по отношению к данным рискам.
Учитывая, что факторы риска, определенные в 4.3, не обязательно относятся ко всем типам МДУС, уровень риска в данной ситуации для разных МДУС меняется. Таким образом, оценка риска выполняется для определения надлежащих защитных мер, подходящих для данной МДУС.
6.2 Методы верификации и валидации
Методы верификации и валидации включают следующие, но не ограничиваются ими:
- визуальный осмотр;
- тестирование;
- измерение;
- наблюдение в процессе работы;
- анализ специфичных для применения принципиальных схем, а также схем соединений и проектных данных;
- анализ оценки риска в реальных условиях;
- анализ технических условий и информации по использованию.
6.3 Требуемые верификация и валидация
В приложении В приведен список конкретных требований, которые были определены как важные для обеспечения безопасности, и поэтому должны подлежать верификации и валидации. Данные требования должны быть протестированы с использованием надлежащих мер, чтобы убедиться в том, что конструкция и конфигурация МДУС полностью соответствует данным требованиям.
10
ГОСТ Р 60.6.0.2—2023
Приложение А (справочное)
Основное назначение мобильной дистанционно управляемой системы
А.1 Общие положения
Основным назначением МДУС является защита операторов от опасностей, заменяя их при выполнении опасных заданий, например в радиоактивной среде. С данной точки зрения МДУС должна быть способна контролировать уровень радиоактивности и состояние оборудования и конструкций объектов использования атомной энергии, выполняя техническое обслуживание и ремонт и работая с радиоактивными материалами в конкретных прикладных областях, включая радиационный и ядерный терроризм.
А.2 Задания для МДУС
А.2.1 Общие положения
Основными заданиями для МДУС являются следующие:
- обследование;
- контроль состояния объекта использования атомной энергии, включая мощность дозы излучения и уровень радиоактивности;
- ремонт компонентов;
- работа с радиоактивными веществами;
- ликвидация последствий и восстановление после аварий;
- демонтаж и вывод из эксплуатации объектов использования атомной энергии;
- дезактивация объектов использования атомной энергии.
А.2.2 Физическое и визуальное обследование
Для выполнения данного задания МДУС может быть оснащена специализированными модулями для обследования, например ультразвуковыми датчиками, инфракрасными датчиками, датчиками радиации и камерами высокой четкости.
При выполнении данного задания МДУС может проводить следующие работы:
- обследование целостности сварных конструкций;
- обследование наличия коррозии или утечек;
- обследование мест скопления грязи;
- обследование пучков труб;
- обследование мест утечки воды из бассейна;
- обследование внутри трубопроводов;
- контроль утечек и распространения радиоактивных веществ.
А.2.3 Контроль состояния объекта
При выполнении данного задания МДУС может проводить следующие работы:
- проверка целостности конструкций;
- измерение параметров внешней среды, таких как температура, влажность, мощность дозы излучения, уровень радиоактивности и распределение радиоактивных веществ;
- картографирование объекта.
А.2.4 Ремонт компонентов
При выполнении данного задания МДУС может проводить следующие работы:
- выявление и удаление посторонних веществ в контуре охлаждения;
- сварка и резка компонентов и трубопроводов;
- ликвидация утечек;
- очистка от грязи;
- очистка или забивание труб.
А.2.5 Работа с радиоактивными веществами
При выполнении данного задания МДУС может проводить следующие работы:
- поиск и удаление радиоактивного мусора;
- очистка и удаление радиоактивных осадков из резервуара или отстойника;
- поиск радиоактивных источников.
А.2.6 Ликвидация последствий и восстановление после аварий
При выполнении данного задания МДУС может проводить следующие работы:
- отбор образцов, определение характеристик и измерение параметров внешней среды (мощность дозы излучения, энергетический спектр радиоизотопов, взрывоопасные газы);
- обнаружение и обезвреживание загрязнений;
- контроль за зараженными утечками;
- удаление мусора, включая остатки топлива;
11
ГОСТ Р 60.6.0.2—2023
- картографирование аварийной зоны;
- проверка работоспособности вентилей, приводов, контрольных переключателей или кнопок;
- транспортирование тяжелых грузов, требующих восстановления;
- мониторинг показаний индикаторов, датчиков и приборов;
- сбор образцов почвы, жидкостей и пыли;
- установка предупредительных знаков, отмечающих опасные зоны, и ограждений;
- определение расположения радиоактивных источников.
А.2.7 Демонтаж и вывод из эксплуатации объектов
При выполнении данного задания МДУС может проводить следующие работы:
- нанесение на карту конструкций и уровня радиоактивного заражения;
- резка и удаление труб, машин, компонентов и аппаратуры;
- транспортирование отрезанных материалов.
А.2.8 Дезактивация объектов атомной энергии
При выполнении данного задания МДУС может проводить следующие работы:
- дезактивация территории объектов использования атомной энергии, в том числе выводимых из эксплуатации;
- дезактивация помещений объектов использования атомной энергии, в том числе выводимых из эксплуатации;
- дезактивация оборудования объектов использования атомной энергии, в том числе выводимых из эксплуатации.
12
Приложение В (справочное)
Методы верификации и валидации требований безопасности и контрмер
В таблице В.1 приведены конкретные требования, которые были определены как критические для безопасности МДУС и поэтому подлежат верификации или валидации.
Таблица В.1 — Методы верификации и валидации требований безопасности и контрмер
Пункт | Применимые требования безопасности и контрмеры | Методы верификации и/или валидации | ||||||
А Визуальный осмотр | В Тестирование | С Измерение | D Наблюдение в процессе работы | Е Анализ принципиальных схем и проектных данных | F Анализ оценки риска в реальных условиях | G Анализ технических условий и информации по использованию | ||
5.2.2 | Требования по предотвращению травмирования людей | |||||||
Снижение всех возможных рисков, указанных в 4.1, до уровня ниже допустимого предела, если эти риски достигли уровня, на котором персонал может пострадать | ||||||||
Предупреждение персонала о рисках при подготовке, монтаже, эксплуатации, возвращении, дезактивировании, осмотре, техническом обслуживании, ремонте или использовании МДУС для других целей | ||||||||
Четкое определение и документирование способов эксплуатации МДУС. Следует определить возможные риски для каждого способа эксплуатации и пути их снижения | ||||||||
Отсутствие причинения вреда персоналу при столкновении или контакте с МДУС с учетом ее физических (скорость, развиваемые усилия) или электрических характеристик | л/ | |||||||
Гарантирование безопасности при ремонте или техническом обслуживании МДУС. Для снижения риска рекомендуется использовать модульную конструкцию, которая позволяет пользователю просто заменить вышедший из строя модуль | ||||||||
ГОСТ Р 60.6.0.2—2023
Продолжение таблицы В. 1
Пункт | Применимые требования безопасности и контрмеры | Методы верификации и/или валидации | ||||||
А Визуальный осмотр | В Тестирование | с Измерение | D Наблюдение в процессе работы | Е Анализ принципиальных схем и проектных данных | F Анализ оценки риска в реальных условиях | G Анализ технических условий и информации по использованию | ||
Препятствование загрязнению МДУС радиоактивными веществами | V | |||||||
Дезактивирование МДУС после завершения выполнения задания, чтобы обслуживающий персонал мог выполнить техническое обслуживание или ремонт после дезактивирования | ||||||||
Надежное закрепление всех элементов МДУС и исключение выпадения отдельных элементов, приводящих к травмированию персонала | л/ | |||||||
5.2.3 | Требования по предотвращению повреждения объектов использования атомной энергии | |||||||
Предотвращение повреждения конструкций объекта при падении или опрокидывании МДУС | л/ | |||||||
Предотвращение повреждения конструкций объекта в случае неожиданного столкновения МДУС с данными конструкциями. Рабочая скорость передвижения МДУС должна быть ограничена в достаточной степени, чтобы снизить возможный риск | ||||||||
Предотвращение повреждения конструкций объекта при случайном контакте с МДУС, а контактное давление на конструкцию было ниже допустимого уровня. При выполнении задания следует предпринимать следующие действия: - не допускать появления посторонних предметов, которые могут повредить конструкции или нарушить нормальный режим работы ядерного объекта. При манипулировании предметами необходимо не допускать их выпадение из захватного устройства; | ||||||||
ГОСТ Р 60.6.0.2—2023
Продолжение таблицы В. 1
Пункт | Применимые требования безопасности и контрмеры | Методы верификации и/или валидации | ||||||
А Визуальный осмотр | В Тестирование | С Измерение | D Наблюдение в процессе работы | Е Анализ принципиальных схем и проектных данных | F Анализ оценки риска в реальных условиях | G Анализ технических условий и информации по использованию | ||
-для обнаружения посторонних предметов следует проводить осмотр рабочей зоны; - при обнаружении посторонних предметов их следует удалять из рабочей зоны | ||||||||
5.2.4 | Требования по предотвращению повреждения МДУС | |||||||
Обеспечение резервирования и диверсификации для снижения риска в случае сбоя, ухудшения рабочих характеристик и неисправности устройства | л/ | |||||||
Обеспечение радиационной выносливости или стойкости МДУС | л/ | |||||||
Обеспечение водонепроницаемости подсистемы, модуля или узла МДУС, при необходимости | л/ | |||||||
Предотвращение ухудшения характеристик подсистемы, модуля или узла МДУС из-за запыленности рабочей среды, при необходимости | ||||||||
Минимизация воздействия вибрации на подсистему, модуль или узел МДУС, а при необходимости следует применить меры виброзащиты | ||||||||
Обеспечение механической прочности и уменьшение трения подсистемы, модуля или узла МДУС, при необходимости | ||||||||
Обеспечение соответствия размеров и формы подсистемы, модуля или узла МДУС условиям выполнения поставленного задания | ||||||||
ГОСТ Р 60.6.0.2—2023
-j- Окончание таблицы В. 1
Пункт | Применимые требования безопасности и контрмеры | Методы верификации и/или валидации | ||||||
А Визуальный осмотр | В Тестирование | С Измерение | D Наблюдение в процессе работы | Е Анализ принципиальных схем и проектных данных | F Анализ оценки риска в реальных условиях | G Анализ технических условий и информации по использованию | ||
Обеспечение надлежащей балансировки центра масс МДУС, чтобы избежать опрокидывания. При необходимости форма или центр масс МДУС должны иметь возможность регулировки | л/ | А | ||||||
Оснащение МДУС контрольно-измерительными устройствами для выявления возможных рисков | ||||||||
ГОСТ Р 60.6.0.2—2023
ГОСТ Р 60.6.0.2—2023
Приложение ДА (справочное)
Сопоставление структуры настоящего стандарта со структурой примененного в нем международного стандарта
Таблица ДА.1
Структура настоящего стандарта | Структура международного стандарта IEC 63048:2020 |
1 Область применения 2 Термины и определения (раздел 3) 3 Сокращения (раздел 4) 4 Общие сведения (раздел 5) 5 Общие требования (раздел 6) 6 Верификация и валидация (раздел 7) | 1 Область применения 2 Нормативные ссылки 3 Термины и определения 4 Сокращения 5 Общие сведения 6 Общие требования 7 Верификация и валидация |
Приложение А Основное назначение МДУС Приложение В Методы верификации и валидации требований безопасности и контрмер Приложение ДА Сопоставление структуры настоящего стандарта со структурой примененного в нем международного стандарта | Приложение А Основное назначение МДУС Приложение В Методы верификации и валидации требований безопасности и контрмер |
Примечание — После заголовков разделов настоящего стандарта приведены в скобках номера аналогичных им разделов международного стандарта.
17
ГОСТ Р 60.6.0.2—2023
Библиография
[7] SG-CG/M490/E:2012-12 CEN-CENELEC-ETSI Координационная группа по интеллектуальным сетям. Процессы устойчивого развития (Smart Grid Coordination Group — Sustainable Processes)
18
ГОСТ Р 60.6.0.2—2023
УДК 64-83:64.06:007.52:006.86:006.354
ОКС 27.120.01
25.040.30
Ключевые слова: роботы, робототехнические устройства, мобильные дистанционно управляемые системы, объекты использования атомной энергии, общие требования, мобильные роботы
19
Редактор Л.В. Каретникова
Технический редактор В.Н. Прусакова
Корректор Е.Д. Дульнева
Компьютерная верстка Е.О. Асташина
Сдано в набор 09.10.2023. Подписано в печать 27.10.2023. Формат 60x847s. Гарнитура Ариал.
Усл. печ. л. 2,79. Уч.-изд. л. 2,23.
Подготовлено на основе электронной версии, предоставленной разработчиком стандарта
Создано в единичном исполнении в ФГБУ «Институт стандартизации» , 117418 Москва, Нахимовский пр-т, д. 31, к. 2.
{kind=link}