ГОСТ ISO 21940-31-2016
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Вибрация
БАЛАНСИРОВКА РОТОРОВ
Часть 31
Подверженность и чувствительность машин к дисбалансу
Mechanical vibration. Rotor balancing. Par 31. Susceptibility and sensitivity of machines to unbalance
МКС 17.160
Дата введения 2017-12-01
Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены в ГОСТ 1.0-2015 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2-2015 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Открытым акционерным обществом "Научно-исследовательский центр контроля и диагностики технических систем" (АО "НИЦ КД") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 5
2 ВНЕСЕН Федеральным агентством по техническому регулированию и метрологии
3 ПРИНЯТ Межгосударственным Советом по стандартизации, метрологии и сертификации (протокол от 8 декабря 2016 г. N 50)
За принятие проголосовали:
Краткое наименование страны по | Код страны по | Сокращенное наименование национального органа по стандартизации |
Армения | AM | Минэкономики Республики Армения |
Беларусь | BY | Госстандарт Республики Беларусь |
Грузия | GE | Грузстандарт |
Казахстан | KZ | Госстандарт Республики Казахстан |
Киргизия | KG | Кыргызстандарт |
Россия | RU | Росстандарт |
Таджикистан | TJ | Таджикстандарт |
4 Приказом Федерального агентства по техническому регулированию и метрологии от 9 февраля 2017 г. N 41-ст межгосударственный стандарт ГОСТ ISO 21940-31-2016 введен в действие в качестве национального стандарта Российской Федерации с 1 декабря 2017 г.
5 Настоящий стандарт идентичен международному стандарту ISO 21940-31:2013* "Вибрация. Балансировка роторов. Часть 31. Подверженность и чувствительность машин к дисбалансу" ("Mechanical vibration - Rotor balancing - Part 31: Susceptibility and sensitivity of machines to unbalance", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Международный стандарт разработан подкомитетом ISO/ТС 108/SC 5 "Контроль состояния и диагностика машин" технического комитета по стандартизации ISO/TC 108 "Вибрация, удар и контроль состояния" Международной организации по стандартизации (ISO).
Официальные экземпляры международного стандарта, на основе которого подготовлен настоящий межгосударственный стандарт, и международных стандартов, на которые даны ссылки, имеются в Федеральном агентстве по техническому регулированию и метрологии.
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
6 ВЗАМЕН ГОСТ 31186-2002 (ИСО 10814:1996)
7 ПЕРЕИЗДАНИЕ. Март 2019 г.
Информация об изменениях к настоящему стандарту публикуется в ежегодном информационном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячном информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
Введение
Балансировка ротора, проводимая на стадии изготовления машин (например, в соответствии с [1] или [4]), обычно обеспечивает получение приемлемых уровней вибрации машины в процессе ее эксплуатации, если отсутствуют другие источники вибрации помимо дисбаланса. Но есть и исключения, когда машина при вводе в эксплуатацию требует дополнительной балансировки. Более того, в процессе эксплуатации машины время от времени, а то и достаточно часто, может появляться необходимость устранения дисбаланса.
Причиной повышенной вибрации машины при вводе в эксплуатацию может быть неправильно проведенная балансировка ротора или погрешности в его сборке. Но может оказаться и так, что причиной чрезмерной вибрации собранной машины является ее повышенная чувствительность к небольшим остаточным дисбалансам, значения которых укладываются в обычные пределы допусков.
При обнаружении повышенной вибрации первая попытка ее устранения зачастую состоит в проведении балансировки на месте эксплуатации. Если при этом удается устранить вибрацию с помощью относительно небольших корректирующих масс, это свидетельствует о высокой чувствительности машины к дисбалансу. Такое может быть, например, в случаях, когда рабочая скорость машины близка к критической, или в случае низкого демпфирования в системе "ротор-опора".
Если машина с высокой чувствительностью к дисбалансу обладает к тому же и повышенной подверженностью изменения дисбаланса, то такая машина может потребовать частого проведения балансировки на месте ее установки. Причиной изменения дисбаланса могут быть, например, износ элементов машины, изменение температуры, массы, жесткости и демпфирующих свойств машины в процессе ее работы.
Если в процессе эксплуатации дисбаланс машины, также как и другие условия ее работы, сохраняется практически неизменным, то достаточно проводить только незначительную дополнительную балансировку, совмещаемую с другими ремонтными работами или процедурами технического обслуживания. В противном случае может возникнуть необходимость внесения изменений в конструкцию машины, которые позволят изменить значения ее критических частот, характеристик демпфирования или других параметров. Таким образом, пользователю необходимо знать, какое значение чувствительности машины к дисбалансу является допустимым.
В настоящем стандарте предполагается, что вибрация на частоте вращения ротора обусловлена только неуравновешенностью машины. Следует, однако, иметь в виду, что помимо дисбаланса на вибрацию машины, в том числе и на частоте вращения, влияет множество других факторов, например погрешности изготовления и сборки. Чувствительность машины ко многим из этих погрешностей близка к чувствительности к дисбалансу и может быть удовлетворительно описана с помощью последней, однако рассмотрение всех иных факторов, помимо дисбаланса, выходит за рамки настоящего стандарта.
Кроме того, чувствительность машины к дисбалансу может изменяться в процессе ее работы. Это зависит от конструктивных особенностей машины, в том числе от свойств ее опоры и фундамента. Указанные свойства могут изменяться со временем в результате действия процессов износа и образования трещин. Модальные характеристики некоторых тепловых машин, особенно снабженных подшипниками скольжения, изменяются в зависимости от эксплуатационных параметров (давление и температура пара, температура масла и пр.). Для электрических машин на характер вибрации оказывают влияние другие параметры, например значение силы тока возбуждения. Все эти эффекты, требующие для их выявления применения диагностических процедур, в настоящем стандарте не рассматриваются.
1 Область применения
Настоящий стандарт устанавливает методы определения чувствительности машин к дисбалансу, а также оценки степени близости рабочей скорости вращения ротора машины к критической скорости вращения.
В настоящем стандарте приведены рекомендации по применению числовых значений чувствительности в ряде практических случаев.
Настоящий стандарт устанавливает классификацию машин на группы в зависимости от подверженности машин дисбалансу и указывает значения модальной чувствительности к дисбалансу, характерные для машин каждой группы. Эти значения применяют для машин, у которых имеется либо одна критическая скорость в рабочем диапазоне скоростей вращения, либо несколько критических скоростей, разнесенных между собой достаточно широко (более чем на 20% их значения).
Приведенные значения чувствительности не предназначены для использования в качестве условий приемки машин, а служат только для указания того, как избежать, с одной стороны, повышенной вибрации машины, а с другой - завышенных требований к плавности ее работы. Они могут служить также основанием для проведения более подробных исследований, например, в случаях, когда необходимо уточнить значение чувствительности конкретной машины.
Выполнение рекомендаций настоящего стандарта в отношении чувствительности машины к дисбалансу позволяет ожидать, что вибрация машины не превысит установленных пределов. Однако необходимо иметь в виду, что в машине существует много других источников вибрации, которые в настоящем стандарте не рассматриваются.
2 Нормативные ссылки
Для применения настоящего стандарта необходим следующий ссылочный стандарт*. Для датированных ссылок применяют только указанное издание ссылочного стандарта. Для недатированных - последнее издание ссылочного стандарта (включая все его изменения).
ISO 1925, Mechanical vibration. Balancing. Vocabulary (Вибрация. Балансировка. Словарь)
________________
Заменен на ISO 21940-22017
3 Термины и определения
В настоящем стандарте применены термины по ISO 1925.
Примечание - Пояснение к некоторым терминам дано в приложении A.
4 Классификация машин по степени их подверженности дисбалансу
4.1 Общие положения
Классификация машин по степени их подверженности дисбалансу основана на оценке ожидаемого развития дисбаланса в процессе работы машины. Для машин с низкой подверженностью дисбалансу допустима более высокая чувствительность к дисбалансу (т.е. они требуют меньшего демпфирования), и, наоборот, если подверженность к дисбалансу высока, то для обеспечения приемлемых уровней вибрации машина должна обладать низкой чувствительностью к дисбалансу (иметь более высокое демпфирование).
4.2 Группа I. Низкая подверженность
Для машин данной группы характерна низкая вероятность появления значительного изменения дисбаланса в процессе их эксплуатации. Обычно такие машины имеют ротор, масса которого велика по сравнению с массой несущего корпуса, работают в условиях чистой среды, имеют незначительный износ, а изменения формы ротора вследствие изменения температуры минимальны.
Пример - Валы бумагоделательных машин, печатные валы, высокоскоростные вакуумные насосы.
4.3 Группа II. Средняя подверженность
Для машин данной группы характерна средняя вероятность появления значительного изменения дисбаланса в ходе их эксплуатации. Ротор таких машин может быть подвержен значительным перепадам температуры или умеренному износу.
Пример - Насосы, работающие в чистых средах, якорь электрической машины, газовые и паровые турбины, генераторы, турбокомпрессоры.
4.4 Группа III. Высокая подверженность
Для машин данной группы характерна высокая вероятность появления значительного изменения дисбаланса в ходе их эксплуатации. Обычно такие машины работают в средах, вызывающих осаждение частиц на поверхности ротора (например, при работе насоса для откачивания грязных вод) или коррозию ротора.
Пример - Центрифуги, вентиляторы, шнековые конвейеры, молотковые мельницы.
4.5 Поправочный множитель на подверженность к дисбалансу
В настоящем стандарте рассматриваются преимущественно машины второй группы, обладающие средней подверженностью к дисбалансу. Если машина относится к группе I (низкая подверженность дисбалансу) или к группе III (высокая подверженность дисбалансу), то для ее классификации по чувствительности используют соответствующие поправочные множители. Значения поправочных множителей к значениям чувствительности (см. раздел 5) в зависимости от группы машины (см. 4.2-4.4) показаны в таблице 1.
Таблица 1 - Поправочные множители на подверженность дисбалансу
Группа | Подверженность дисбалансу | Поправочный множитель |
I | Низкая | 4/3 |
II | Средняя | 1 |
III | Высокая | 2/3 |
5 Модальная чувствительность
5.1 Общие положения
Модальную чувствительность определяют через коэффициент усиления n-й моды вибрации , определяющий условия работы машины на соответствующей критической частоте вращения ротора. Для того чтобы обеспечить низкую чувствительность машины к дисбалансу, следует разнести на достаточно большое расстояние рабочую и критическую частоты вращения ротора, а если это невозможно, то обеспечить высокое значение коэффициента демпфирования соответствующей моды.
Важно также знать модальную чувствительность для тех критических скоростей, через которые проходит ротор во время набора частоты до достижения рабочего диапазона частот или при выбеге, поскольку от ее значения зависит создаваемая дисбалансом ротора вибрация.
5.2 Классы модальной чувствительности
Введение понятия модальной чувствительности позволяет классифицировать машины по ожидаемым условиям их работы во всем диапазоне частот вращения ротора (см. таблицу 2).
Таблица 2 - Классификация машин по модальной чувствительности
Класс | Описание класса | Ожидаемые условия работы машины |
A | Очень низкая чувствительность | Трудно различимый резонанс |
B | Низкая чувствительность | Незначительное изменение вибрации |
C | Средняя чувствительность | Допустимая вибрация |
D | Высокая чувствительность | Повышенная вибрация, связанная с дисбалансом |
E | Очень высокая чувствительность | Очень высокая вибрация, вызванная дисбалансом |
5.3 Выбор модальной чувствительности
Наиболее благоприятным для работы машины является класс A, однако с учетом возможностей реализации данных условий работы машины и затрат на реализацию этих условий может оказаться более целесообразным иметь более высокие значения модальной чувствительности.
Для машин с высокими рабочими характеристиками (например, имеющих короткий интервал между циклами планового технического обслуживания) допустимы более высокие значения модальной чувствительности.
Машины, для которых балансировка на месте эксплуатации непрактична или экономически невыгодна, должны иметь более низкие значения модальной чувствительности.
Низкая чувствительность не дает гарантии того, что все части машины будут иметь вибрацию, не превышающую установленные пределы (см. разделы 7 и 8).
5.4 Значения модальной чувствительности
5.4.1 Общие положения
Класс модальной чувствительности определяют по допустимому значению модальной чувствительности, выраженной через коэффициент усиления на резонансе . В свою очередь, допустимые значения
получают из допустимого остаточного удельного дисбаланса по [1] и допустимой вибрации по [2], [3]. В совокупности указанные документы позволяют определить значения модальной чувствительности, обеспечивающие нормальную работу машины на рабочей частоте вращения.
5.4.2 Допустимый удельный дисбаланс
Допустимый остаточный дисбаланс ротора определяют по формуле
![]() , (1)
, (1)
где - допустимый удельный дисбаланс;
m - масса ротора.
В [1] установлены классы точности балансировки G, которые определяют требования к качеству балансировки в зависимости от типа ротора. Значение G зависит от рабочей частоты вращения ротора и может быть определено по формуле
![]() . (2)
. (2)
Для машины конкретного вида класс точности балансировки полагают постоянным. Например, если ![]() = 2,5 мм/с, то класс точности обозначают G2.5.
= 2,5 мм/с, то класс точности обозначают G2.5.
Примечание - Рабочая частота вращения выражена в виде угловой частоты , рад/с, которая связана со скоростью вращения ротора n, мин
, соотношением
![]() .
.
Преобразуя формулу (2), можно получить выражение для допустимого остаточного дисбаланса через рабочую частоту вращения машины и класс точности балансировки:
![]() . (3)
. (3)
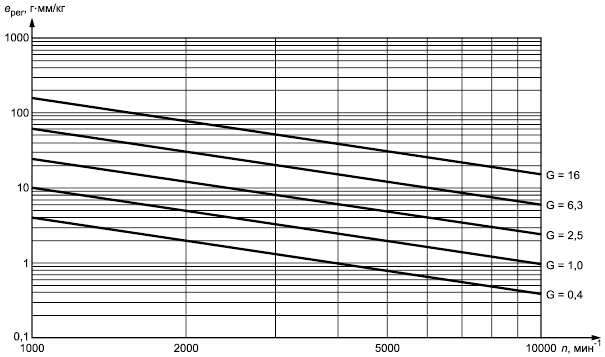
На рисунке 1 показана зависимость допустимого удельного дисбаланса от рабочей скорости вращения ротора для разных классов точности балансировки. Для машин с классом точности балансировки G2,5 и скоростью вращения ротора 3000 мин допустимый остаточный дисбаланс будет равен 8,0 мкм, а при увеличении скорости до 3600 мин
он станет равным 6,6 мкм.
|
 .
.
Примечание - Единица измерения (г·мм/кг) эквивалентна единице измерения (мкм).
Рисунок 1 - Допустимый удельный дисбаланс по [1]
5.4.3 Допустимая вибрация
В [2] и [3] определены зоны вибрационного состояния для ротора, работающего в установившемся режиме:
- Зона A: в нее попадает, как правило, вибрация новых машин, вводимых в эксплуатацию;
- Зона B: машины, вибрация которых попадает в эту зону, обычно считают пригодными для эксплуатации без ограничения сроков;
- Зона C: машины, вибрация которых попадает в эту зону, обычно считают непригодными для длительной непрерывной работы. Обычно допускают функционирование таких машин ограниченный период времени, пока не появится возможность проведения восстановительных мероприятий;
- Зона D: уровни вибрации в данной зоне обычно рассматривают как способные вызывать серьезные повреждения машин.
Границы зон вибрационного состояния, выраженные через размах перемещения ![]() , мкм, обратно пропорциональны квадратному корню из максимальной рабочей скорости n, мин
, мкм, обратно пропорциональны квадратному корню из максимальной рабочей скорости n, мин, и рассчитываются по следующим формулам:
Для границы между зонами A и B:
![]() . (4)
. (4)
Для границы между зонами B и C:
![]() . (5)
. (5)
Для границы между зонами C и D:
![]() . (6)
. (6)
На рисунке 2 показано изменение границ зон вибрационного состояния в зависимости от максимальной рабочей скорости вращения ротора. В таблице 3 приведены значения границ зон вибрационного состояния для типичных скоростей вращения ротора машин группы II.
|
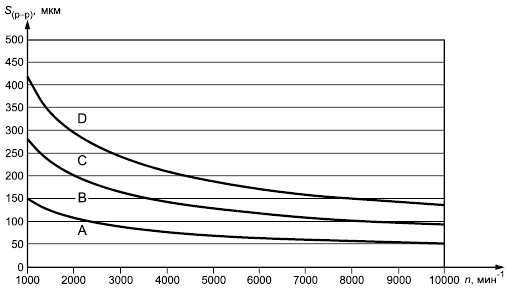
Рисунок 2 - Границы зон вибрационного состояния согласно (2] и [3]
Таблица 3 - Границы зон вибрационного состояния для типичных скоростей вращения ротора
Скорость вращения, мин | Граница между зонами A и B, | Граница между зонами B и C, | Граница между зонами C и D, |
1500 | 123,9 | 232,4 | 340,8 |
1800 | 113,1 | 212,1 | 311,1 |
3000 | 87,6 | 164,3 | 241,0 |
3600 | 80,0 | 150,0 | 220,0 |
Примечание - Определение зон вибрационного состояния дано в 5.4.3. | |||
5.4.4 Определение модальной чувствительности для установившегося режима вращения ротора
На основе формул (3)-(6), а также формул для модальной чувствительности, приведенных в приложении A, для каждой границы зон вибрационного состояния могут быть получены значения модальной чувствительности, зависящие от скорости вращения ротора. В общем виде эта зависимость описывается формулой
 , (7)
, (7)
где ![]() - размах перемещения на границе между зонами вибрационного состояния по [2] и [3], мкм;
- размах перемещения на границе между зонами вибрационного состояния по [2] и [3], мкм;
- допустимый удельный дисбаланс ротора по [1], мкм.
Примечание 1 - Модальная чувствительность , определяющая отношение амплитуды вибрации по n-й моде к вызывающему эту вибрацию удельному модальному дисбалансу, является безразмерной величиной. Коэффициент 2 в знаменателе формулы (7) связан с необходимостью перейти от значения размаха к значению амплитуды.
Так, для границы между зонами A и B получаем
![]() , (8)
, (8)
для границы между зонами B и C -
![]() , (9)
, (9)
и для границы между зонами C и D -
![]() . (10)
. (10)
Примечание 2 - Определение зон вибрационного состояния дано в 5.4.3.
Из формул (8)-(10) видно, что значения для границ зон вибрационного состояния зависят от скорости вращения ротора n (см. рисунок 3).
|
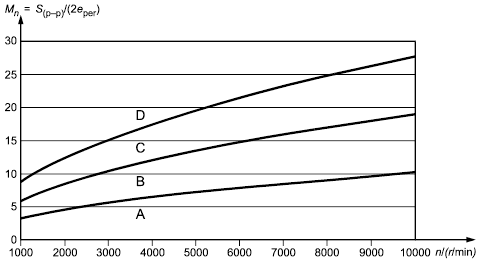
Рисунок 3 - Границы зон вибрационного состояния согласно [2] и [3]
В таблице 4 приведены значения границ зон вибрационного состояния, выраженные через M, для типичных скоростей вращения ротора.
Для упрощения оценки модальной чувствительности целесообразно ограничить возможную вариативность рабочей скорости вращения ротора. Поскольку многие машины группы II работают с номинальными рабочими скоростями 3000 мин или 3600 мин
, для описания границ между классами чувствительности A/B, B/C, C/D и D/E (см. 5.2) можно с некоторым запасом принять соответствующие значения модальной чувствительности
, равные 5, 10, 15 и 20. Рисунки 4 и 5, показывающие зависимость коэффициента усиления на резонансе (добротности)
от относительной критической частоты вращения
![]() (
( - критическая частота;
- частота вращения ротора), применимы ко всем машинам независимо от их номинальной скорости вращения.
Таблица 4 - Границы зон вибрационного состояния, выраженные через , для типичных скоростей вращения ротора
Скорость вращения, мин | Значения | ||
A/B | B/C | C/D | |
1500 | 3,9 | 7,3 | 10,7 |
1800 | 4,3 | 8,0 | 11,7 |
3000 | 5,5 | 10,3 | 15,1 |
3600 | 6,0 | 11,3 | 16,6 |
Примечание - Определение зон вибрационного состояния дано в 5.4.3. | |||
5.5 Рабочая скорость
Используя формулу (A.2), можно получить кривые для разных классов модальной чувствительности в диапазоне номинальных рабочих скоростей ротора (см. рисунок 4 для машин группы II). В приложении C даны два примера того, каким образом можно использовать информацию, приведенную на рисунке 4.
|
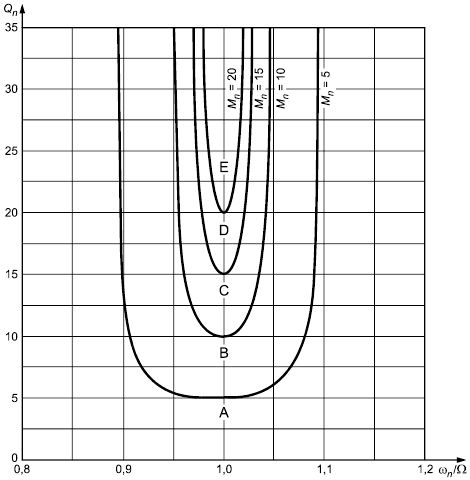
Рисунок 4 - Допустимый коэффициент усиления на резонансе для разных классов чувствительности для номинальных рабочих частот вращения
Для машин других групп по подверженности дисбалансу следует использовать соответствующие поправочные множители. Значения для разных классов чувствительности для машин разных групп приведены в таблице 5.
Таблица 5 - Границы зон чувствительности для машин разных групп по подверженности дисбалансу
Границы зон чувствительности | Значения | ||
Группа I | Группа II | Группа III | |
A/B | 6,7 | 5,0 | 3,3 |
B/C | 13,3 | 10,0 | 6,7 |
C/D | 20,0 | 15,0 | 10,0 |
D/E | 26,7 | 20,0 | 13,3 |
Примечание - Определение классов чувствительности дано в 5.2. | |||
5.6 Работа ротора в переходном режиме
Для роторов, работающих в переходном режиме или осуществляющих в процессе работы прохождение через критические скорости вращения, допустимы более высокие значения модальной чувствительности.
В этом случае критерий также основан на относительной критической частоте вращения ![]() . Для частот ниже рабочего диапазона график изменения допустимого значения
. Для частот ниже рабочего диапазона график изменения допустимого значения представляют собой прямую линию, которая спадает от значения 4
в точке 0 Гц со скоростью минус 2
вплоть до области, показанной на рисунке 4. Выше рабочего диапазона график представляет собой параллельную прямую, соответствующую значению 2
. На рисунке 5 показан график изменения допустимого значения
для машин группы II.
|
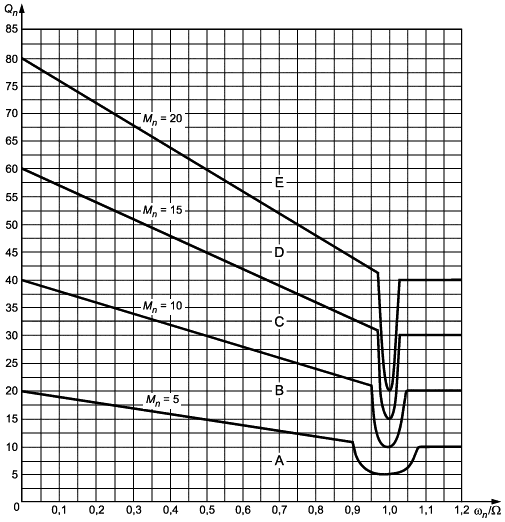
Рисунок 5 - Допустимый коэффициент усиления на резонансе во всем диапазоне частот вращения ротора
6 Экспериментальное определение модальной чувствительности
6.1 Общие положения
Для определения модальной чувствительности необходимо получение информации о том, как изменяется вибрация на частоте вращения в процессе изменения этой частоты. Обычно для этого проводят измерения вибрации на частоте вращения в процессе разгона и выбега. Полученные значения амплитуды и фазы вибрации на частоте вращения позволяют построить амплитудно-фазочастотную характеристику (диаграмму Найквиста) и определить параметры демпфирования, как указано в 6.2. Если при измерениях получают значения только амплитуды вибрации, то это позволяет построить амплитудно-частотную характеристику (диаграмма Боде) и использовать процедуру, описанную в 6.3.
Примечание - Существуют и другие способы определения характеристик демпфирования конструкции, например в результате аппроксимации полученной кривой амплитудно-фазочастотной характеристики полиномом, в который в явном виде входят коэффициенты модального демпфирования. При этом возможно получение оценок даже в случае, если измерения проводились только в дорезонансной области и не захватывали резонанс. Однако если подъем характеристики у верхней границы диапазона измерений был обусловлен наличием не одного, а двух или более близко расположенных резонансов, оценка модального демпфирования может быть получена с большой погрешностью.
6.2 Построение диаграммы Найквиста
На резонансных скоростях чувствительность к дисбалансу сильно зависит от значения демпфирования. Поскольку само демпфирование может зависеть от различных факторов, рекомендуется, чтобы определение чувствительности проводилось в режиме работы машины, максимально приближенном к нормальному рабочему режиму (например, по температуре).
Во многих случаях вибрация на скорости, близкой к критической, проявляется преимущественно в виде соответствующей моды колебаний, так что ее можно представить в виде отклика эквивалентной системы с одной степенью свободы. При этом характеристики демпфирования и резонансная частота изгибных колебаний могут быть получены посредством измерений во время медленного разгона или выбега машины (с небольшим ускорением).
Система с одной степенью свободы описывает n-ю моду вибрации; при этом справедливо следующее соотношение
![]() , (11)
, (11)
где - максимальная модальная чувствительность, равная
при частоте вращения ротора, равной критической (
![]() );
);
(или
) - частота вращения, при которой фаза колебаний сдвинута относительно колебаний на критической частоте на ±45°, мин
.
Пример построения диаграммы приведен в приложении С.
В некоторых случаях форма кривой диаграммы Найквиста может значительно отличаться от окружности вследствие того, что в системе присутствуют несколько близко расположенных друг к другу резонансов. В этом случае оценку модальной чувствительности можно получить, устанавливая на ротор набор пробных грузов, подобранных таким образом, чтобы возбудить требуемую моду вибрации. Процедуру построения диаграммы Найквиста в этом случае применяют не к вектору вибрации, а к вектору разности между исходной вибрацией и той, что получена после размещения набора пробных грузов.
Для построения диаграммы Найквиста можно использовать сигналы вибрации на частоте вращения с любых датчиков, кроме тех, что расположены вблизи узлов мод изгибных колебаний, однако данные с датчиков, установленных в местах пучностей, позволят получить более точные результаты.
6.3 Построение диаграммы Боде
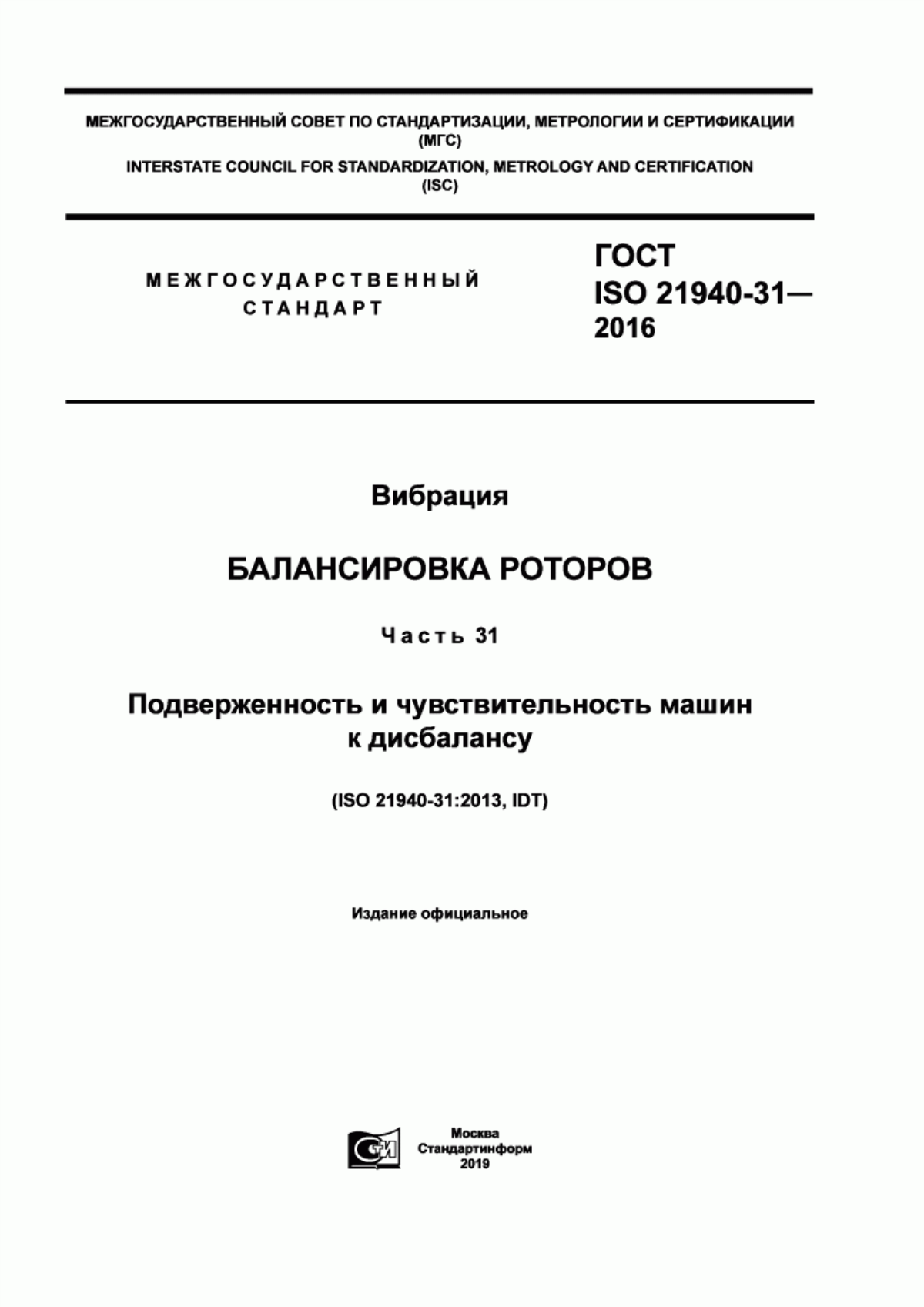
При отсутствии информации о фазе колебаний, т.е. когда имеется только зависимость амплитуды перемещения на частоте вращения от скорости вращения ротора, коэффициент усиления вибрации Q можно определить с помощью диаграммы, показанной на рисунке 6, по формуле
![]() , (12)
, (12)
где - частота вращения ротора, соответствующая максимальной амплитуде вибрации S
;
и
- значения частоты вращения, соответствующие уровню 0,707 пика на резонансе.
Ограничения по точности для данного метода могут быть связаны с малым демпфированием в системе, искажением формы резонансной кривой вследствие влияния соседних мод и другими факторами. Если влияние таких факторов существенно, следует обратиться к методу пробных грузов, описанному в 6.2.
На точность определения модальной чувствительности могут повлиять также скорость передачи данных измерительной аппаратурой и ограниченность числа точек в выборке данных.
|
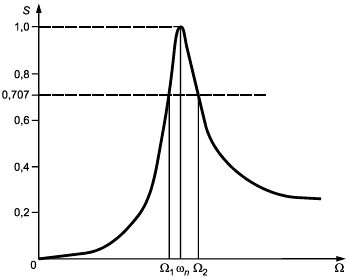
Рисунок 6 - Применение диаграммы Боде для оценки модальной чувствительности
7 Локальная чувствительность
Во многих случаях (например, для роторов с развитой консольной частью, роторов с ограниченным зазором в некоторых сечениях, роторов с рабочей скоростью, близкой к критической) интерес может представлять локальная чувствительность (коэффициент влияния) для разных скоростей в пределах рабочего диапазона, включая критические скорости машины.
Значение локальной чувствительности, измеренное для данной машины, зависит, помимо прочего, от расположения плоскости измерений и положения пробного груза вдоль оси ротора. Этим локальная чувствительность отличается от модальной чувствительности, которая на определенной скорости вращения имеет единственное значение.
Обычно определять локальную чувствительность необходимо только в тех измерительных точках, для которых при заданной скорости вращения существуют ограничения амплитуды вибрации. Поэтому измеренную чувствительность в некоторой точке и для некоторой скорости следует оценивать, сравнивая ее с отношением допустимой амплитуды к допустимому дисбалансу. Локальную чувствительность в заданной точке ротора при заданной скорости вращения определяют по формуле (см. примечание 2 приложения A):
 , (13)
, (13)
где - допустимая амплитуда перемещения:
- допустимый удельный дисбаланс.
Примечание - Значения допустимого дисбаланса и допустимой амплитуды могут быть определены соответственно по [4] и стандартам серии ISO 7919 (следует обратить внимание на то, что в последних предельные значения вибрации установлены для величины размаха, а не амплитуды).
Значения допустимого дисбаланса и допустимой амплитуды могут быть установлены также в результате соглашения между изготовителем машины и потребителем.
В зависимости от эксплуатационных параметров машины (рабочей скорости, ее отношения к критической скорости и т.д.) может оказаться целесообразным ограничить максимальную допускаемую локальную чувствительность, введя в правую часть формулы (13) некоторый множитель меньше единицы.
Для режимов разгона и выбега машины допустимы, как правило, более высокие значения вибрации, чем при работе на постоянной рабочей скорости. Поэтому для скоростей, отличных от рабочей, можно считать приемлемыми более высокие значения локальной чувствительности, если при этом вибрация не превышает установленных предельных значений.
8 Экспериментальное определение локальной чувствительности
8.1 Общие положения
При измерениях локальной чувствительности выбор плоскостей установки грузов выбирается из соображений удобства доступа, а также из условия получения при установке пробных грузов максимального отклика вибрации для заданных мод и заданных скоростей.
8.2 Метод
Определение локальной чувствительности проводят следующим образом:
a) подготавливают машину к работе в нормальном режиме:
b) устанавливают частоту вращения , на которой должны быть проведены измерения. Обычно выбирают скорость в диапазоне рабочих скоростей, максимально близкую к критической. Ждут, пока вибрация машины и другие параметры ее работы достигнут установившихся значений, после чего измеряют вибрацию на частоте вращения в заданных плоскостях. В процессе измерений следует, по возможности, поддерживать постоянными скорость, нагрузку и другие параметры, которые могут оказать влияние на вибрацию машины;
c) добавляют один пробный груз, создающий дисбаланс , в заданную r-ю плоскость коррекции. Масса груза должна быть достаточно большой, чтобы вызвать значительное изменение вибрации, но не настолько большой, чтобы вызвать появление опасных вибраций машины в процессе испытаний. Иногда вместо одиночного груза допускается устанавливать набор грузов;
d) измеряют вибрацию в условиях, аналогичных указанным на этапе b);
e) для каждой измерительной плоскости вычисляют векторную разность между величинами, измеренными согласно этапам b) и d). Локальный дисбаланс
определяют в результате деления
на изменение дисбаланса
(см. приложение A).
определено для той скорости работы машины, на которой проводились измерения.
При проведении измерений следует учитывать такие факторы, как диапазон линейности вибрации и повторяемость результатов измерений.
9 Анализ чувствительности машины к дисбалансу
Если в получении необходимых экспериментальных данных имеются трудности, целесообразно провести численный анализ для тех машин, которые в процессе разгона или в установившемся режиме работы проходят через критические частоты или близко подходят к ним.
Такой анализ требует использования математических моделей с включением следующих данных:
a) массо-жесткостных характеристик ротора и его опоры;
b) жесткости и коэффициента демпфирования подшипников и уплотнений, являющихся функциями скорости вращения;
c) значений собственных частот и соответствующих форм мод колебаний;
d) расчетных значений модального демпфирования:
e) расчетных значений локальной чувствительности для заданных точек вдоль оси ротора и заданных плоскостей дисбаланса.
В модель вводят значение дисбаланса, определяемое по формулам (1) и (2) из класса точности балансировки для данной машины, массы ротора и частоты вращения (см. пример приложения D). Вибрационный отклик на воздействие сил, обусловленных данным дисбалансом, сравнивают с допустимыми значениями, полученными по формулам (4)-(6). Дополнительно для классификации по модальной чувствительности может быть использован график зависимости допустимого усиления на резонансе от частоты вращения ротора (см. рисунок 5).
При расчетах для соответствующей моды вибрации дисбаланс должен быть отнесен к соответствующей плоскости. Так для расчетов первой моды он должен быть отнесен к точке вблизи середины пролета ротора, а для второй моды - к точкам вблизи концов ротора, колеблющимся в противофазе.
Приложение A
(справочное)
Пояснения применяемых терминов
A.1 Общие положения
Чувствительность к дисбалансу обычно определяют двумя способами, указанными в разделах A.2 и A.3.
A.2 Локальная чувствительность
Локальную чувствительность определяют по формуле
 , (A.1)
, (A.1)
где - изменение гармоники вибрации оборотной частоты в плоскости k;
![]() - изменение дисбаланса путем установки пробного груза (или набора грузов) в плоскости r ротора.
- изменение дисбаланса путем установки пробного груза (или набора грузов) в плоскости r ротора.
Примечание - Локальную чувствительность часто называют коэффициентом влияния. Это размерная величина.
A.3 Модальная чувствительность
Модальную чувствительность определяют как коэффициент усиления перемещения по n-й моде вибрации, обусловленного действием дисбаланса, по формуле
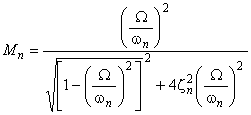 , (A.2)
, (A.2)
где - частота вращения ротора:
- n-я критическая частота вращения ротора (в отсутствие демпфирования);
- коэффициент демпфирования для n-й моды.
Примечание 1 - Формулу (А.2) получают из анализа динамики простой одномассовой модели ротора на упругих опорах с демпфированием (ротора Джеффкотта), для которой амплитуду перемещения S можно представить в виде
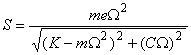 , (A.3)
, (A.3)
где m - масса ротора;
e - эксцентриситет массы ротора;
K - жесткость опоры;
C - демпфирование.
Разделив числитель и знаменатель на K, формулу (A.3) преобразуют к виду
 , (A.4)
, (A.4)
Выражение ![]() представляет собой частоту резонанса
представляет собой частоту резонанса линейной системы с одной степенью свободы без демпфирования, а отношение C/K равно
![]() , где
, где - коэффициент демпфирования. Это позволяет упростить формулу (A.4) до вида
 . (A.5)
. (A.5)
Поскольку по определению отношение S/e представляет собой модальную чувствительность , формула (A.5) эквивалентна формуле (A.2).
Если скорость вращения равна критической, то равна
![]() . В случае малого демпфирования эта величина определяет максимальное усиление вибрации на резонансе, называется коэффициентом усиления на резонансе (или добротностью) и обозначается Q
. В случае малого демпфирования эта величина определяет максимальное усиление вибрации на резонансе, называется коэффициентом усиления на резонансе (или добротностью) и обозначается Q. Данная величина зависит только от уровня демпфирования в системе.
Примечание 2 - Модальная чувствительность является безразмерной величиной.
Приложение B
(справочное)
Пример построения диаграммы Найквиста
Результаты измерений, проведенных не разных скоростях, приведены на диаграмме Найквиста (рисунок B.1) и в таблице B.1.
|
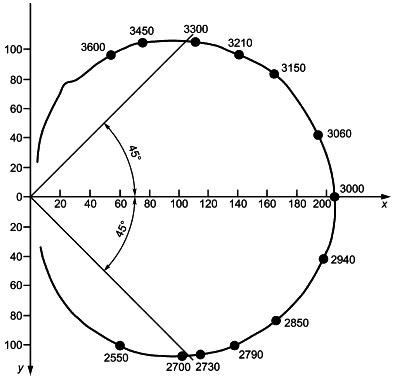
Рисунок В.1 - Диаграмма Найквиста, показывающая изменение амплитуды и фазы вибрации при прохождении через резонансную скорость
Анализ измерений показывает, что значение первой критической скорости n равно 3000 мин
, а скорость N
, на которой фазовый угол изменяется на 45° - 2710 мин
и 3320 мин
. В соответствии с формулой (11) можно рассчитать значение коэффициента усиления Q
.
Таблица B.1 - Результат измерений для скорости n=3000 мин
N | Q |
2710 | 4,91 |
3320 | 4,92 |
Если первая и вторая критические скорости расположены близко друг к другу или если имеет место наложение колебаний от других резонансов, то для оценки модельных параметров потребуются более сложные методы анализа.
Приложение C
(справочное)
Примеры классификации по значениям модальной чувствительности
C.1 Пример 1
Машина - газовая турбина (группа II).
Рабочая скорость n - 3000 мин (постоянная).
Первая критическая скорость - 2730 мин.
Коэффициент демпфирования (полученный экспериментально на месте установки) - 0,04.
Критическая скорость очень близка к рабочей скорости машины. Значение коэффициента усиления на резонансе Q может быть получено из коэффициента демпфирования
:
![]() =12,5.
=12,5.
Отношение критической и рабочей скоростей равно ![]() =0,95.
=0,95.
Используя рисунки 4 и 5, можно увидеть, что данная машина относится к классу B (низкая чувствительность).
C.2 Пример 2
Та же машина, что в примере 1, но ее рабочая скорость равна критической, т.е. ![]() =1,0.
=1,0.
Согласно рисунку 4 машина попадает в класс C (средняя чувствительность).
Приложение D
(справочное)
Пример расчета дисбаланса
Машина - газовая турбина (группа II).
Рабочая скорость - 3000 мин (постоянная).
Масса ротора - 80000 кг.
Согласно [1] класс точности балансировки газовых турбин - G2,5. С использованием формулы (2) рассчитывают допустимый удельный дисбаланс:
![]() =0,008 мм.
=0,008 мм.
Таким образом, допустимый остаточный дисбаланс ротора машины равен
![]() =0,008·80000= 640 кг·мм.
=0,008·80000= 640 кг·мм.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов межгосударственным стандартам
Таблица ДА.1
Обозначение международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
ISO 1925 | - | * |
* Соответствующий межгосударственный стандарт отсутствует. До его принятия рекомендуется использовать перевод данного международного стандарта на русский язык. | ||
Библиография
[1] | ISO 1940-1 |
_________________ | |
[2] | ISO 7919-2, Mechanical vibration - Evaluation of machine vibration by measurements on rotating shafts - Part 2: Land-based steam turbines and generators in excess of 50 MW with normal operating speeds of 1500 r/min, 1800 r/min, 3000 r/min and 3600 r/min
|
[3] | ISO 7919-4, Mechanical vibration - Evaluation of machine vibration by measurements on rotating shafts - Part 4: Gas turbine sets with fuid-flm bearings |
[4] | ISO 11342 |
________________
| |
[5] | Shiraki K., & Kanki H.A. New vibration criteria for high speed/large capacity turbomachinery. Proceedings of 8th Turbomachinery Symposium, 1979, pp. 59-70 |
[6] | Wutsdorff P. |
УДК 631.242.1.0723:006.354 | МКС 17.160 | IDT |
Ключевые слова: вибрация, машины, подверженность дисбалансу, чувствительность к дисбалансу, модальная чувствительность, локальная чувствительность | ||
Электронный текст документа
и сверен по:
, 2019
{kind=link}