ГОСТ 32700-2020
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
ЖЕЛЕЗНОДОРОЖНЫЙ ПОДВИЖНОЙ СОСТАВ
Методы контроля сцепляемости
Railway rolling stock. Test methods of coupling
МКС 45.060
Дата введения 2020-12-01
Предисловие
Цели, основные принципы и общие правила проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, обновления и отмены"
Сведения о стандарте
1 РАЗРАБОТАН Акционерным обществом "Научно-исследовательский институт железнодорожного транспорта" (АО "ВНИИЖТ")
2 ВНЕСЕН Межгосударственным техническим комитетом по стандартизации МТК 524 "Железнодорожный транспорт"
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 28 февраля 2020 г. N 127-П)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по МК (ИСО 3166) 004-97 | Сокращенное наименование национального органа по стандартизации |
Армения | AM | Минэкономики Республики Армения |
Беларусь | BY | Госстандарт Республики Беларусь |
Казахстан | KZ | Госстандарт Республики Казахстан |
Киргизия | KG | Кыргызстандарт |
Россия | RU | Росстандарт |
Узбекистан | UZ | Узстандарт |
Украина | UA | Минэкономразвития Украины |
(Поправка. ИУС N 8-2020).
4 Приказом Федерального агентства по техническому регулированию и метрологии от 24 марта 2020 г. N 149-ст межгосударственный стандарт ГОСТ 32700-2020 введен в действие в качестве национального стандарта Российской Федерации с 1 декабря 2020 г.
5 ВЗАМЕН ГОСТ 32700-2014
Информация о введении в действие (прекращении действия) настоящего стандарта и изменений к нему на территории указанных выше государств публикуется в указателях национальных стандартов, издаваемых в этих государствах, а также в сети Интернет на сайтах соответствующих национальных органов по стандартизации.
В случае пересмотра, изменения или отмены настоящего стандарта соответствующая информация будет опубликована на официальном интернет-сайте Межгосударственного совета по стандартизации, метрологии и сертификации в каталоге "Межгосударственные стандарты"
ВНЕСЕНА поправка, опубликованная в ИУС N 8, 2020 год
Поправка внесена изготовителем базы данных
1 Область применения
Настоящий стандарт устанавливает методы контроля железнодорожного подвижного состава, предназначенного для эксплуатации на железнодорожных путях общего и необщего пользования колеи 1520 мм, при его сцеплении и прохождении кривых в сцепленном состоянии без самопроизвольного разъединения.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие межгосударственные стандарты:
ГОСТ 166 (ИСО 3599-76) Штангенциркули. Технические условия
ГОСТ 427 Линейки измерительные металлические. Технические условия
ГОСТ 3475 Устройство автосцепное подвижного состава железных дорог колеи 1520 (1524) мм. Установочные размеры
ГОСТ 7502 Рулетки измерительные металлические. Технические условия
ГОСТ 21447 Контур зацепления автосцепки. Размеры
ГОСТ 32885-2014 Автосцепка модели СА-3. Конструкция и размеры
ГОСТ 33211-2014 Вагоны грузовые. Требования к прочности и динамическим качествам
ГОСТ 33788-2016 Вагоны грузовые и пассажирские. Методы испытаний на прочность и динамические качества
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов и классификаторов на официальном интернет-сайте Межгосударственного совета по стандартизации, метрологии и сертификации (www.easc.by) или по указателям национальных стандартов, издаваемым в государствах, указанных в предисловии, или на официальных сайтах соответствующих национальных органов по стандартизации. Если на документ дана недатированная ссылка, то следует использовать документ, действующий на текущий момент, с учетом всех внесенных в него изменений. Если заменен ссылочный документ, на который дана датированная ссылка, то следует использовать указанную версию этого документа. Если после принятия настоящего стандарта в ссылочный документ, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение применяется без учета данного изменения. Если ссылочный документ отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
3.1 адаптер (переходное приспособление): Деталь или сборочная единица, обеспечивающая сцепление сцепок или автосцепок различных конструкций между собой.
3.2 сцепляемость: Возможность обеспечения механического соединения (сцепления) сцепных и (или) автосцепных устройств, установленных на единицах железнодорожного подвижного состава.
3.3 сцеп: Две или несколько единиц железнодорожного подвижного состава, сцепленных между собой.
3.4 прохождение сцепом кривых: Обеспечение перемещения сцепа по кривым участкам железнодорожного пути без расцепления (самопроизвольного разъединения), повреждения его деталей и сборочных единиц.
3.5 горизонтальные кривые: Криволинейные участки в плане пути.
3.6 вертикальные кривые: Криволинейные участки в продольном профиле пути.
3.7 путь надвига: Железнодорожный путь, по которому состав вагонов надвигается на горб сортировочной горки.
3.8 путь роспуска: Железнодорожный путь, по которому состав вагонов движется от горба сортировочной горки под действием силы тяжести.
3.9 кривая сопряжения: Участок железнодорожного пути между путем надвига и путем роспуска, сопрягающий их вертикальной кривой.
3.10
вагон сочлененного типа: Вагон, соседние секции которого опираются на одну общую тележку. [ГОСТ 33211-2014, пункт 3.16] |
3.11 длина консоли: Расстояние от оси ближнего пятника кузова до оси сцепления сцепки или автосцепки.
4 Общие положения
4.1 Оценку обеспечения сцепляемости железнодорожного подвижного состава и возможности прохождения (без самопроизвольного разъединения) в сцепе по криволинейным участкам проводят согласно требованиям настоящего стандарта.
4.2 Для четырехосных грузовых вагонов, имеющих длину по осям сцепления не более 24 м и длину консоли не более 3,25 м, а также для вагонов сочлененного типа с длиной крайней секции (расстоянием от центра шарнирного соединительного устройства до оси сцепления автосцепки) не более 24 м и длиной консоли не более 3,25 м, оборудованных автосцепным устройством с параметрами по ГОСТ 3475, влияющими на отклонение в горизонтальной плоскости, с автосцепкой, имеющей контур зацепления по ГОСТ 21447, контроль обеспечения сцепляемости и прохождения (без самопроизвольного разъединения) сцепом вагонов горизонтальных кривых выполняют расчетным методом в соответствии с разделом 8 ГОСТ 33211-2014.
4.3 Для локомотивов, пассажирских вагонов локомотивной тяги, вагонов моторвагонного подвижного состава и специального железнодорожного подвижного состава контроль обеспечения сцепляемости и прохождения в сцепленном состоянии (без самопроизвольного разъединения) по горизонтальным кривым выполняют экспериментальным методом в соответствии с 6.1 и 6.2.
Для грузовых вагонов с параметрами, не удовлетворяющими условиям 4.2, контроль обеспечения сцепляемости и прохождения (без самопроизвольного разъединения) сцепом горизонтальных кривых выполняют расчетно-экспериментальным методом в соответствии с 6.2.9.
4.4 Проверку прохождения вертикальных кривых: сортировочных горок и аппарели парома для всех видов подвижного состава, кроме локомотивов и грузовых вагонов, выполняют расчетным методом в соответствии с приложениями А и Б. Для грузовых вагонов проверку проводят расчетным методом в соответствии с разделом 8 ГОСТ 33211-2014. Проверку проводят для сцепа из двух одинаковых по номинальным значениям линейных размеров (база, длина консоли) единиц железнодорожного подвижного состава.
4.5 Испытания на сцепляемость не проводят для промежуточных вагонов подвижного состава, предназначенного для эксплуатации в поездах постоянного формирования. Головные вагоны испытывают при сцеплении с локомотивом.
5 Условия проведения испытаний
5.1 Испытания проводят на открытом воздухе независимо от давления, температуры и влажности воздуха, наличия или отсутствия атмосферных осадков.
5.2 Испытания проводят на участках железнодорожного пути, радиус которых соответствует заданному в таблице 1 с отклонением не более минус 10%. Длина участка кривой (от точки сопряжения) должна быть не менее длины испытуемой единицы подвижного состава (для круговой кривой - не менее двойной длины испытуемой единицы подвижного состава).
Состояние пути, на котором проводят испытания, должно соответствовать требованиям, установленным по нормативным документам* государств, проголосовавших за принятие настоящего стандарта.
________________
* В Российской Федерации применяют Правила технической эксплуатации железных дорог Российской Федерации, утвержденные приказом Минтранса России от 21 декабря 2010 г. N 286, редакция от 1 сентября 2016 г. N 257.
Таблица 1 - Радиусы кривых для проведения испытаний
В метрах | ||||
Режим | Участок железнодорожного пути | Радиус кривой | ||
испытаний | Грузовые вагоны, специальный железнодорожный подвижной состав | Пассажирский и моторвагонный железнодорожный подвижной | ||
длиной по осям сцепления менее 21 м | длиной по осям сцепления 21 м и более | состав, локомотивы | ||
Автоматическое сцепление | Круговая кривая и участок сопряжения прямой с кривой без переходного радиуса | 135 | 250 | 250 |
Проход в сцепе | Круговая кривая и участок сопряжения прямой с кривой без переходного радиуса | 80 | 110 | 120 |
S-образная кривая без прямой вставки | 120 | 160 | 170 | |
5.3 Радиус кривой, на которой проводят испытания, определяют на основании натурных измерений и расчетов в соответствии с рисунком 1 и по формуле (1).
|
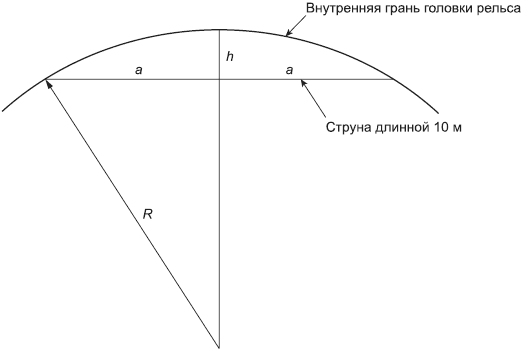
Рисунок 1 - Схема определения радиуса кривой
По хорде наружного рельса в кривой натягивают струну длиной 2а, равной 10 м, концы струны должны прилегать к внутренней грани головки рельса на 13 мм ниже уровня головки. На струне отмечают середину, относительно которой измеряют высоту сегмента ![]() до внутренней грани головки рельса. Высоту сегмента измеряют на 13 мм ниже уровня головки.
до внутренней грани головки рельса. Высоту сегмента измеряют на 13 мм ниже уровня головки.
Ширину колеи измеряют между боковыми гранями головок рельсов в точках, расположенных на 13 мм ниже уровня головки рельса.
Радиус кривой ![]() , м, рассчитывают по формуле
, м, рассчитывают по формуле
![]() , (1)
, (1)
где - половина длины хорды, м;
![]() - высота сегмента, м;
- высота сегмента, м;
- ширина колеи, м.
Определение радиуса проводят трехкратно со смещением струны вдоль оси пути на расстояние (1,75±0,25) м. В качестве радиуса кривой ![]() принимают среднее арифметическое из полученных результатов.
принимают среднее арифметическое из полученных результатов.
Условия испытаний удовлетворяют требуемым в случае соответствия радиусов значениям, установленным в 5.2.
5.4 Рекомендуемые средства измерений, применяемые при испытаниях на сцепляемость, а также прохождение (без самопроизвольного разъединения) железнодорожного подвижного состава по кривым в сцепленном состоянии приведены в приложении В. Средства измерений должны быть поверены в соответствии с национальным законодательством об обеспечении единства измерений* и обеспечивать точность при измерении:
- длины хорды - ±10 мм;
- центра струны - ±5 мм;
- высоты сегмента - ±1 мм;
- ширины колеи - ±1 мм.
________________
* В Российской Федерации действует Федеральный закон от 26 июня 2008 г. N 102-ФЗ "Об обеспечении единства измерений".
6 Порядок проведения испытаний
6.1 Испытания на сцепляемость
6.1.1 Испытания проводят при сцеплении двух одинаковых по номинальным значениям линейных размеров (база, длина консоли) единиц железнодорожного подвижного состава между собой. Испытания локомотивов допускается проводить при сцеплении с четырехосным грузовым вагоном длиной по осям сцепления не менее 21 м или пассажирским вагоном длиной по осям сцепления не менее 25,5 м (в зависимости от рода службы локомотива), оборудованными автосцепным устройством в соответствии с ГОСТ 3475.
Допускается проводить испытания единичного опытного образца вагона или специального железнодорожного подвижного состава при сцеплении с локомотивом длиной по осям сцепления (17±1) м и базой (9±1) м.
Испытания на сцепление вагонов моторвагонного подвижного состава, а также специального железнодорожного подвижного состава, состоящего из вагонов, различных по конструкции и линейным размерам, проводят при их сцеплении между собой в соответствии со схемой формирования поезда. Если схема поезда может быть разной, то проверяют все варианты схем формирования.
6.1.2 Испытания проводят независимо от степени загрузки подвижного состава.
6.1.3 Испытания проводят при разности высот продольных осей автосцепок испытуемого железнодорожного подвижного состава друг относительно друга на величину, не превышающую значений, установленных нормативными документами** государств, проголосовавших за принятие настоящего стандарта. В случае оценки по величине перекрытия замков испытания проводят при величине перекрытия замков смежных автосцепок не ниже значений, установленных нормативными документами** государств, проголосовавших за принятие настоящего стандарта.
________________
** В Российской Федерации применяют Правила технической эксплуатации железных дорог Российской Федерации, утвержденные приказом Минтранса России от 21 декабря 2010 г. N 286, редакция от 1 сентября 2016 г. N 257.
6.1.4 Испытания заключаются в подходе испытуемого локомотива или передвижении испытуемой единицы подвижного состава толканием тяговым подвижным составом на заторможенный вагон, или локомотив, или вагон в сцепе с другим железнодорожным подвижным составом до момента сцепления. При этом первая испытуемая единица подвижного состава располагается на кривой; вторая испытуемая единица подвижного состава или локомотив - на кривой (для сцепления в круговой кривой) или на прямой (для сцепления на участке сопряжения прямой с кривой). В последнем случае оси сцепления автосцепок при сцеплении должны быть расположены в точке сопряжения прямой с кривой с точностью ±0,3 м.
6.1.5 Подход локомотива или передвижение вагонов выполняют со скоростями, не превышающими значений, установленных нормативными документами* государств, проголосовавших за принятие настоящего стандарта.
________________
* В Российской Федерации применяют Правила технической эксплуатации железных дорог Российской Федерации, утвержденные приказом Минтранса России от 21 декабря 2010 г. N 286, редакция от 1 сентября 2016 г. N 257.
6.1.6 При испытаниях выполняют по три сцепления в каждой кривой, радиусы которых соответствуют значениям, приведенным в таблице 1.
Контроль обеспечения сцепления выполняют визуально по положению деталей механизма сцепления, а также прикладывая растягивающую нагрузку.
В случае несцепления в одном из опытов проводят три подхода локомотива или передвижения вагона дополнительно. Положительным результатом является три сцепления подряд.
6.1.7 Для единиц железнодорожного подвижного состава, оборудованного сцепным устройством, не обеспечивающим непосредственного сцепления с автосцепкой с контуром зацепления по ГОСТ 21447, дополнительно проводят испытания при сцеплении с локомотивом длиной по осям сцепления (17±1) м и базой (9±1) м, оборудованным автосцепкой, имеющей контур зацепления по ГОСТ 21447 и размеры по ГОСТ 32885, через адаптер (переходное приспособление). Испытания проводят в соответствии с 6.1.2-6.1.6.
Для поездов постоянного формирования, предназначенных для эксплуатации по системе многих единиц и/или в сцепе с локомотивом конкретной модели, проводят испытания при сцеплении с аналогичным типом поезда и/или с моделью локомотива, предназначенной для эксплуатации с данным поездом.
6.2 Испытания при прохождении горизонтальных кривых в сцепленном состоянии и отсутствии самопроизвольного разъединения
6.2.1 Испытания проводят при прохождении горизонтальных кривых сцепом из двух одинаковых по номинальным значениям линейных размеров (база, длина консоли) единиц железнодорожного подвижного состава. Испытания локомотивов допускается проводить в сцепленном состоянии с четырехосным грузовым вагоном длиной по осям сцепления не менее 21 м или пассажирским вагоном длиной по осям сцепления не менее 25,5 м (в зависимости от рода службы локомотива), оборудованными автосцепным устройством в соответствии с ГОСТ 3475.
Допускается проводить испытания единичного опытного образца вагона или специального железнодорожного подвижного состава в сцепленном состоянии с локомотивом длиной по осям сцепления (17±1) м и базой (9±1) м.
6.2.2 Для единиц железнодорожного подвижного состава, оборудованных сцепным устройством, не обеспечивающим непосредственного сцепления с автосцепкой с контуром зацепления по ГОСТ 21447, дополнительно проводят испытания при прохождении кривых в сцепе с локомотивом длиной по осям сцепления (17±1) м и базой (9±1) м, оборудованным автосцепкой, имеющей контур зацепления по ГОСТ 21447 и размеры по ГОСТ 32885, через адаптер (переходное приспособление).
6.2.3 Испытания проводят независимо от степени загрузки подвижного состава.
6.2.4 Разность высот продольных осей автосцепок при испытаниях (величина перекрытия замков) в соответствии с 6.1.3.
6.2.5 Испытания заключаются в прохождении сцепом, составленным в соответствии с 6.2.1, по кривым, радиус которых соответствует значениям, приведенным в таблице 1, со скоростями, не превышающими значений, установленных соответствующими нормативными документами* государств, проголосовавших за принятие настоящего стандарта. Передвижение сцепа вагонов может быть выполнено любым тяговым подвижным составом.
________________
* В Российской Федерации применяют Правила технической эксплуатации железных дорог Российской Федерации, утвержденные приказом Минтранса России от 21 декабря 2010 г. N 286, редакция от 1 сентября 2016 г. N 257.
6.2.6 При испытаниях в каждой кривой, установленной в таблице 1, выполняют три прохождения сцепом с вагонами (или другими единицами железнодорожного подвижного состава), прицепленными сзади (в режиме тяги), и три прохождения вагонами (или другими единицами железнодорожного подвижного состава) вперед (в режиме толкания).
6.2.7 В процессе каждого прохождения выполняют визуальный контроль отсутствия самопроизвольного разъединения единиц железнодорожного подвижного состава, а после прохождения - отсутствия повреждений (изломов, заклиниваний, деформаций), являющихся следствием смещения деталей и сборочных единиц сцепного (автосцепного) устройства при прохождении кривых.
6.2.8 Результаты испытаний считают положительными при отсутствии самопроизвольного разъединения единиц железнодорожного подвижного состава и повреждений, указанных в 6.2.7. Контроль отсутствия самопроизвольного разъединения единиц железнодорожного подвижного состава выполняют визуально по соответствию положения деталей механизма сцепления требованиям эксплуатационных документов.
6.2.9 Для грузовых вагонов с параметрами, не удовлетворяющими условиям 4.2, контроль прохождения сцепом горизонтальных кривых выполняют следующим расчетно-экспериментальным методом.
Расчетом в соответствии с разделом 8 ГОСТ 33211-2014 определяют максимальные углы отклонения автосцепки в кривых. Затем на вагоне выполняют максимально допустимое поперечное отклонение автосцепки в горизонтальной плоскости вправо и влево относительно вагона и размечают на ударной розетке крайние возможные положения A и B хвостовика автосцепки. По расстоянию ![]() между точками A и B рассчитывают возможный угол
между точками A и B рассчитывают возможный угол ![]() отклонения автосцепки в каждую сторону по формуле
отклонения автосцепки в каждую сторону по формуле
![]() , (2)
, (2)
где ![]() - расстояние между крайними возможными положениями хвостовика автосцепки на ударной розетке, м;
- расстояние между крайними возможными положениями хвостовика автосцепки на ударной розетке, м;
- ширина хвостовика автосцепки, м;
![]() - расстояние от плоскости контакта переднего упора с упорной плитой до окна розетки, измеряемое на подвижном составе, м. Размер
- расстояние от плоскости контакта переднего упора с упорной плитой до окна розетки, измеряемое на подвижном составе, м. Размер ![]() показан на рисунке А.4 приложения А.
показан на рисунке А.4 приложения А.
Если угол ![]() равен или превышает значения максимальных углов отклонения в кривых, определенных расчетным методом в соответствии с разделом 8 ГОСТ 33211-2014, то проход считают обеспеченным. Контроль обеспечения сцепляемости грузовых вагонов при этом выполняют расчетным методом в соответствии с разделом 8 ГОСТ 33211-2014.
равен или превышает значения максимальных углов отклонения в кривых, определенных расчетным методом в соответствии с разделом 8 ГОСТ 33211-2014, то проход считают обеспеченным. Контроль обеспечения сцепляемости грузовых вагонов при этом выполняют расчетным методом в соответствии с разделом 8 ГОСТ 33211-2014.
Если угол ![]() менее значения максимальных углов отклонения в кривых, определенных расчетным методом в соответствии с разделом 8 ГОСТ 33211-2014, то контроль обеспечения сцепляемости и прохождения в сцепленном состоянии по горизонтальным кривым выполняют экспериментальным методом в соответствии с 6.1 и 6.2.
менее значения максимальных углов отклонения в кривых, определенных расчетным методом в соответствии с разделом 8 ГОСТ 33211-2014, то контроль обеспечения сцепляемости и прохождения в сцепленном состоянии по горизонтальным кривым выполняют экспериментальным методом в соответствии с 6.1 и 6.2.
7 Оформление результатов испытаний
Результаты испытаний оформляют протоколом, содержащим следующие данные:
- организацию, место и дату проведения испытаний;
- наименование объекта испытаний;
- идентификационный номер изделия (испытуемого железнодорожного подвижного состава);
- год выпуска объекта испытаний;
- фактические значения радиусов кривых, на которых проведены испытания (с указанием измеренных значений высоты сегмента);
- полученные результаты для каждого испытания на сцепляемость и испытания на прохождение кривых сцепом при всех значениях радиусов кривых, а также заключение о соответствии полученных показателей требованиям;
- инициалы, фамилию и подпись руководителя испытаний.
К протоколу испытаний прилагают сведения об использованных средствах измерений.
8 Требования безопасности и охрана труда
Сцепление и расцепление подвижного состава при проведении испытаний выполняют без нахождения составителей и испытателей между единицами подвижного состава. Прочие требования безопасности в соответствии с подразделом 11.1 ГОСТ 33788-2016.
Приложение А
(обязательное)
Метод расчета прохода сцепом единиц подвижного состава по вертикальным кривым
А.1 Основные положения и принятые допущения
А.1.1 Расчет прохода по вертикальным кривым выполняют для сортировочной горки с переломом профиля 55‰ между плоскостями надвижной и спускной частей, сопряженными вертикальной кривой радиусом 250 м, а также аппарели парома с переломом профиля между горизонтальной плоскостью и аппарелью 40‰. Построение профилей вертикальных кривых для проверки прохождения расчетным методом выполняют в соответствии с приложением Б.
Расчет прохода сцепом по вертикальным кривым выполняют на компьютере в табличном редакторе.
А.1.2 В связи с тем, что в расчете определяют исключительно относительные вертикальные перемещения автосцепок на переломах профиля пути, все расстояния по вертикали от уровня верха головок рельсов до осей колесных пар, пятников тележек и продольных осей хвостовиков, зубьев и замков автосцепок в расчетах принимают равными нулю.
А.1.3 Все линейные размеры единиц подвижного состава вдоль оси пути и их сборочных единиц, используемые в расчете, включая длину единиц подвижного состава по осям сцепления, базу (расстояние между пятниками - осями вращения тележек), длину сцепки (автосцепки) от оси шарнира до оси сцепления, базу тележки (расстояние между осями ее колесных пар), расстояние между соседними осями колесных пар трехосной тележки, расстояние между пятниками соединительной балки четырехосной тележки, задают кратными шагу формирования массива исходных данных профиля пути ![]() =0,05 м, установленному в Б.3 приложения Б.
=0,05 м, установленному в Б.3 приложения Б.
А.1.4 Все линейные размеры, используемые в расчете и формировании массива исходных данных профиля пути вертикальных кривых, указывают в метрах.
А.1.5 При расчете линейных размеров элементов подвижного состава вдоль оси пути в диапазоне углов уклона пути ![]() не более 3,15° (55‰) для упрощения расчетов принимают значения
не более 3,15° (55‰) для упрощения расчетов принимают значения ![]() =1. При этом максимальная ошибка для уклонов пути менее 55‰ (
=1. При этом максимальная ошибка для уклонов пути менее 55‰ (![]() =0,055) не превышает 0,15%.
=0,055) не превышает 0,15%.
А.1.6 Расчетные формулы различаются и зависят от количества осей единиц подвижного состава (четырехосные, шестиосные, восьмиосные), а также от типа сцепного (автосцепного) устройства и центрирующего прибора:
а) автосцепка нежесткого типа, не ограничивающая относительных вертикальных перемещений автосцепок после сцепления, независимо от типа центрирующего прибора;
б) автосцепка полужесткого типа с кронштейном (ограничителем вертикальных перемещений) и с центрирующим прибором жесткого типа;
в) автосцепка полужесткого типа с кронштейном (ограничителем вертикальных перемещений) и с центрирующим прибором с упругой опорой хвостовика;
г) сцепка (автосцепка) жесткого типа, исключающая относительные вертикальные перемещения сцепленных автосцепок, с центрирующим прибором с упругой опорой хвостовика.
А.2 Расчет прохода сцепом единиц четырехосного подвижного состава с автосцепкой нежесткого типа
А.2.1 Таблицу формируют нижеприведенным образом. В заголовках и подзаголовках колонок таблицы указывают наименования параметров в следующем порядке:
- координаты пути ![]() и
и ;
- координаты оси первой колесной пары ![]() и
и ![]() ;
;
- координаты оси второй колесной пары ![]() и
и ![]() ;
;
- координаты оси третьей колесной пары ![]() и
и ![]() ;
;
- координаты оси четвертой колесной пары ![]() и
и ![]() ;
;
- координаты пятника первой тележки ![]() и
и ![]() ;
;
- координаты пятника второй тележки ![]() и
и ![]() ;
;
- угол наклона продольной оси первой единицы подвижного состава ![]() ;
;
- координаты точки пересечения продольной оси единицы подвижного состава и оси сцепления второй автосцепки первой единицы подвижного состава ![]() и
и ![]() .
.
В заголовках и подзаголовках последующих колонок указывают аналогичные данные для второй единицы подвижного состава:
- координаты пятой оси (оси первой колесной пары второй единицы подвижного состава) ![]() и
и ![]() ;
;
- координаты оси шестой колесной пары ![]() и
и ![]() ;
;
- координаты оси седьмой колесной пары ![]() и
и ![]() ;
;
- координаты оси восьмой колесной пары ![]() и
и ![]() ;
;
- координаты пятника третьей тележки (первой тележки второй единицы подвижного состава) ![]() и
и ![]() ;
;
- координаты пятника четвертой тележки ![]() и
и ![]() ;
;
- угол наклона продольной оси второй единицы подвижного состава ![]() ;
;
- координаты точки пересечения продольной оси единицы подвижного состава и оси сцепления третьей автосцепки (первой автосцепки второй единицы подвижного состава) ![]() и
и ![]() ;
;
- разность высот осей второй и третьей автосцепок ![]() .
.
А.2.2 В колонках 1 и 2 приводят значения горизонтальных и вертикальных координат пути, рассчитанные по методу в соответствии с приложением Б.
А.2.3 Первую после заголовка строку таблицы заполняют следующим образом:
а) в ячейках с координатами оси первой колесной пары ![]() и
и ![]() первой единицы подвижного состава указывают ссылки на ячейки с координатами участка пути
первой единицы подвижного состава указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , приведенными в этой же строке;
, приведенными в этой же строке;
б) в ячейках с координатами оси второй колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() , (А.1)
, (А.1)
где ![]() - база тележки единицы подвижного состава;
- база тележки единицы подвижного состава;
в) в ячейках с координатами оси третьей колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() , (А.2)
, (А.2)
где ![]() - база вагона;
- база вагона;
г) в ячейках с координатами оси четвертой колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() ; (А.3)
; (А.3)
д) координаты пятника первой тележки ![]() и
и ![]() рассчитывают как средние значения горизонтальных и вертикальных координат первой и второй осей по формулам:
рассчитывают как средние значения горизонтальных и вертикальных координат первой и второй осей по формулам:
![]() ; (А.4)
; (А.4)
![]() ; (А.5)
; (А.5)
е) координаты пятника второй тележки ![]() и
и ![]() рассчитывают как средние значения горизонтальных и вертикальных координат третьей и четвертой осей по формулам:
рассчитывают как средние значения горизонтальных и вертикальных координат третьей и четвертой осей по формулам:
![]() ; (А.6)
; (А.6)
![]() ; (А.7)
; (А.7)
ж) угол наклона продольной оси первой единицы подвижного состава ![]() рассчитывают по координатам пятников тележек по формуле
рассчитывают по координатам пятников тележек по формуле
![]() ; (А.8)
; (А.8)
и) координаты точки пересечения продольной оси единицы подвижного состава и оси сцепления второй автосцепки первой единицы подвижного состава ![]() и
и ![]() для автосцепки нежесткого типа рассчитывают по формулам:
для автосцепки нежесткого типа рассчитывают по формулам:
![]() ; (А.9)
; (А.9)
![]() , (А.10)
, (А.10)
где ![]() - длина единицы подвижного состава по осям сцепления;
- длина единицы подвижного состава по осям сцепления;
к) координаты осей и пятников второй единицы подвижного состава определяют аналогичным способом с учетом смещения вдоль оси пути на длину единицы подвижного состава по осям сцепления ![]() ;
;
л) в ячейках с координатами для оси пятой колесной пары (оси первой колесной пары второй единицы подвижного состава) ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() ; (А.11)*
; (А.11)*
________________
* Формула соответствует оригиналу. - .
м) в ячейках с координатами оси шестой колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() ; (А.12)
; (А.12)
н) в ячейках с координатами оси седьмой колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() ; (А.13)
; (А.13)
п) в ячейках с координатами оси восьмой колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() ; (А.14)
; (А.14)
р) координаты пятника третьей тележки (первой тележки второй единицы подвижного состава) ![]() и
и ![]() рассчитывают как средние значения горизонтальных и вертикальных координат пятой и шестой осей по формулам:
рассчитывают как средние значения горизонтальных и вертикальных координат пятой и шестой осей по формулам:
![]() ; (А.15)
; (А.15)
![]() ; (А.16)
; (А.16)
с) координаты пятника четвертой тележки ![]() и
и ![]() рассчитывают как средние значения горизонтальных и вертикальных координат седьмой и восьмой осей по формулам:
рассчитывают как средние значения горизонтальных и вертикальных координат седьмой и восьмой осей по формулам:
![]() ; (А.17)
; (А.17)
![]() ; (А.18)
; (А.18)
т) угол наклона продольной оси второй единицы подвижного состава ![]() рассчитывают по координатам пятников тележек по формуле
рассчитывают по координатам пятников тележек по формуле
![]() ; (А.19)
; (А.19)
у) координаты точки пересечения продольной оси единицы подвижного состава и оси сцепления третьей автосцепки (первой автосцепки второй единицы подвижного состава) ![]() и
и ![]() для автосцепки нежесткого типа рассчитывают по формулам:
для автосцепки нежесткого типа рассчитывают по формулам:
![]() ; (А.20)
; (А.20)
![]() (А.21)
(А.21)
(во всех случаях должно быть выполнено условие ![]() , его невыполнение свидетельствует о допущенной ошибке);
, его невыполнение свидетельствует о допущенной ошибке);
ф) разность высот осей автосцепок в точке с координатой по оси пути ![]() , соответствующей
, соответствующей ![]() , рассчитывают по формуле
, рассчитывают по формуле
![]() . (А.22)
. (А.22)
Расчетная схема определения разности высот осей автосцепок при проходе сцепом единиц подвижного состава по вертикальным кривым приведена на рисунке А.1.
|
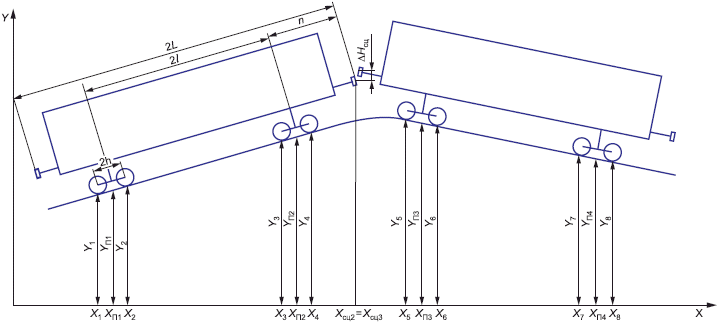
Рисунок А.1 - Расчетная схема определения разности высот осей автосцепок при проходе сцепом единиц подвижного состава по вертикальным кривым
А.2.4 Методом копирования ссылок и формул, указанных в перечислениях а)-ф) А.2.3, процедуру повторяют для всех последующих строк таблицы, содержащих значения горизонтальных и вертикальных координат пути в колонках 1 и 2.
А.2.5 После формирования таблицы по А.2.1-А.2.4 с целью контроля правильности набора формул в табличном редакторе компьютера (любая ошибка вызовет искажение формы кривой) следует построить график ![]() (
(![]() ) в интервале от 20 до 70 м (для сортировочной горки) и от 20 до 90 м (для аппарели парома). Примеры приведены на рисунках А.2 и А.3.
) в интервале от 20 до 70 м (для сортировочной горки) и от 20 до 90 м (для аппарели парома). Примеры приведены на рисунках А.2 и А.3.
|
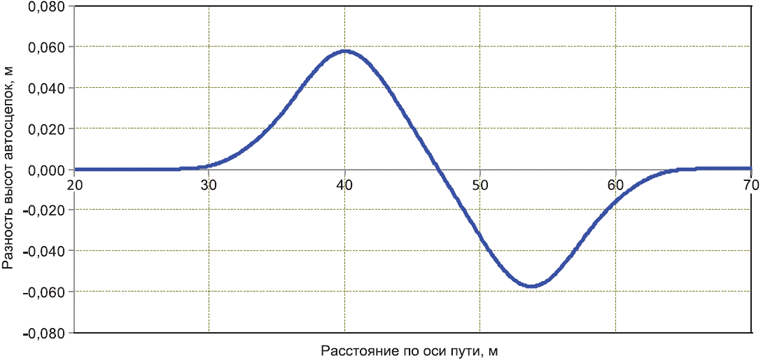
Рисунок А.2 - График изменения разности высот автосцепок ![]() (
(![]() ) при движении сцепа по сортировочной горке
) при движении сцепа по сортировочной горке
|
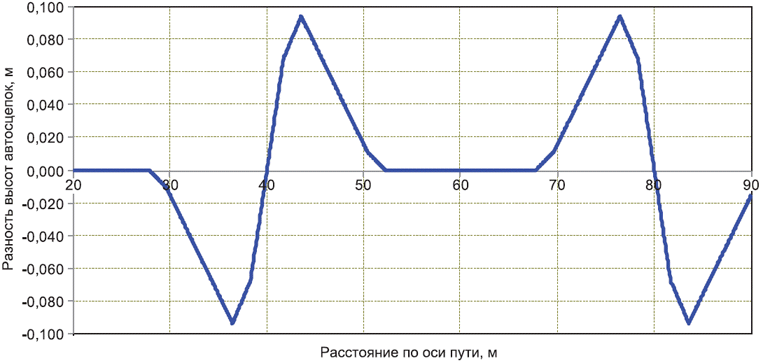
Рисунок А.3 - График изменения разности высот автосцепок ![]() (
(![]() ) при движении сцепа по аппарели парома
) при движении сцепа по аппарели парома
А.2.6 Оценку соответствия предъявляемым требованиям выполняют нижеприведенным образом.
С учетом максимальной исходной разности высот продольных осей автосцепок железнодорожного подвижного состава ![]() , установленной для данного вида подвижного состава национальными нормативными документами* государств, проголосовавших за принятие настоящего стандарта, максимальную разность высот осей автосцепок
, установленной для данного вида подвижного состава национальными нормативными документами* государств, проголосовавших за принятие настоящего стандарта, максимальную разность высот осей автосцепок ![]() , рассчитывают по формуле
, рассчитывают по формуле
![]() . (А.23)
. (А.23)
________________
* В Российской Федерации применяют Правила технической эксплуатации железных дорог Российской Федерации, утвержденные приказом Минтранса России от 21 декабря 2010 г. N 286, редакция от 1 сентября 2016 г. N 257.
Для подвижного состава с автосцепками нежесткого типа (без кронштейнов - ограничителей вертикальных перемещений) проход по расчетному профилю пути считают обеспеченным, если максимальная разность высот осей автосцепок ![]() , рассчитанная по формуле (А.23), не превышает значения допускаемой разности уровней по условию сохранения сцепленного положения, равной 0,18 м.
, рассчитанная по формуле (А.23), не превышает значения допускаемой разности уровней по условию сохранения сцепленного положения, равной 0,18 м.
А.2.7 Результаты расчета оформляют в виде графиков профиля пути (в соответствии с рисунком Б.1 или Б.2 приложения Б) и изменения разности высот автосцепок при движении сцепа по указанному профилю (в соответствии с рисунком А.2 или А.3), а также значения максимальной разности высот осей автосцепок, рассчитанной по формуле (А.23).
А.3 Расчет прохода сцепом единиц шестиосного подвижного состава (на двух трехосных тележках) с автосцепкой нежесткого типа
Таблицу формируют в соответствии с требованиями А.2 со следующими отличиями:
а) координаты осей колесных пар определяют для каждой оси трехосной тележки;
б) в ячейках с координатами оси второй колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() , (А.24)
, (А.24)
где ![]() - расстояние между соседними осями колесных пар трехосной тележки;
- расстояние между соседними осями колесных пар трехосной тележки;
в) в ячейках с координатами ![]() и
и ![]() оси третьей колесной пары указывают ссылки на ячейки с координатами
оси третьей колесной пары указывают ссылки на ячейки с координатами ![]() и
и ![]() участка пути, для которого
участка пути, для которого
![]() ; (А.25)
; (А.25)
г) координаты пятника первой тележки ![]() и
и ![]() рассчитывают по формулам:
рассчитывают по формулам:
![]() ; (А.26)
; (А.26)
![]() ; (А.27)
; (А.27)
д) координаты осей колесных пар и пятников других тележек определяют аналогичным образом;
е) углы наклона продольных осей единиц подвижного состава , координаты точек пересечения осей единиц подвижного состава и осей сцепления автосцепок
![]() и
и ![]() , разности высот осей автосцепок рассчитывают по формулам (А.19)-(А.23);
, разности высот осей автосцепок рассчитывают по формулам (А.19)-(А.23);
ж) процедуру формирования таблицы, построения графика изменения разности высот автосцепок и оценку соответствия предъявляемым требованиям выполняют в соответствии с А.2.4-А.2.7.
А.4 Расчет прохода сцепом единиц восьмиосного подвижного состава (на двух четырехосных тележках) с автосцепкой нежесткого типа
Таблицу формируют в соответствии с требованиями А.2 со следующими отличиями:
а) координаты осей колесных пар определяют для каждой оси четырехосной тележки;
б) в ячейках с координатами оси третьей колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() , (А.28)
, (А.28)
где ![]() - расстояние между осями пятников соединительной балки четырехосной тележки;
- расстояние между осями пятников соединительной балки четырехосной тележки;
в) в ячейках с координатами оси четвертой колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() ; (А.29)
; (А.29)
г) координаты пятника первой тележки ![]() и
и ![]() рассчитывают по формулам:
рассчитывают по формулам:
![]() ; (А.30)
; (А.30)
![]() ; (А.31)
; (А.31)
д) координаты осей колесных пар и пятников других тележек определяют аналогичным образом;
е) углы наклона продольных осей единиц подвижного состава , координаты точек пересечения осей единиц подвижного состава и осей сцепления автосцепок
![]() и
и ![]() , разности высот осей автосцепок рассчитывают по формулам (А.19)-(А.23);
, разности высот осей автосцепок рассчитывают по формулам (А.19)-(А.23);
ж) процедуру формирования таблицы, построения графика изменения разности высот автосцепок и оценку соответствия предъявляемым требованиям выполняют в соответствии с А.2.4-А.2.7.
А.5 Расчет прохода сцепом единиц четырехосного, шестиосного (на двух трехосных тележках) и восьмиосного (на двух четырехосных тележках) подвижного состава с автосцепкой полужесткого типа и центрирующим прибором жесткого типа
А.5.1 Таблицу формируют в соответствии с требованиями А.2 (для четырехосного подвижного состава), или А.3 (для шестиосного подвижного состава), или А.4 (для восьмиосного подвижного состава), кроме оценки результатов расчета, выполняемой в соответствии с А.5.2.
А.5.2 Оценку соответствия предъявляемым требованиям выполняют нижеприведенным образом.
Для подвижного состава с автосцепками полужесткого типа с центрирующим прибором жесткого типа проход по расчетному профилю пути считают обеспеченным при удовлетворении следующего условия
![]() , (А.32)
, (А.32)
где ![]() - расстояние от горизонтальной оси автосцепки до полки кронштейна (ограничителя вертикальных перемещений), равное 0,28 м (размер по инструкции, утвержденной Советом по железнодорожному транспорту государств - участников Содружества [1]);
- расстояние от горизонтальной оси автосцепки до полки кронштейна (ограничителя вертикальных перемещений), равное 0,28 м (размер по инструкции, утвержденной Советом по железнодорожному транспорту государств - участников Содружества [1]);
![]() - высота большого зуба автосцепки (для автосцепки по приложению Б ГОСТ 32885-2014 составляет 0,28 м; для других моделей измеряют на подвижном составе);
- высота большого зуба автосцепки (для автосцепки по приложению Б ГОСТ 32885-2014 составляет 0,28 м; для других моделей измеряют на подвижном составе);
![]() - расстояние по вертикали между хвостовиком автосцепки и верхней кромкой окна розетки не менее 0,02 м (размер по инструкции, утвержденной Советом по железнодорожному транспорту государств - участников Содружества [1]);
- расстояние по вертикали между хвостовиком автосцепки и верхней кромкой окна розетки не менее 0,02 м (размер по инструкции, утвержденной Советом по железнодорожному транспорту государств - участников Содружества [1]);
![]() - длина автосцепки от торца хвостовика до оси сцепления (для автосцепки по приложению Б ГОСТ 32885 составляет 1,0 м; для других моделей измеряют на подвижном составе);
- длина автосцепки от торца хвостовика до оси сцепления (для автосцепки по приложению Б ГОСТ 32885 составляет 1,0 м; для других моделей измеряют на подвижном составе);
![]() - расстояние от плоскости контакта упора с упорной плитой до окна розетки, измеряемое на подвижном составе.
- расстояние от плоскости контакта упора с упорной плитой до окна розетки, измеряемое на подвижном составе.
Приведенные параметры показаны на рисунке А.4.
|
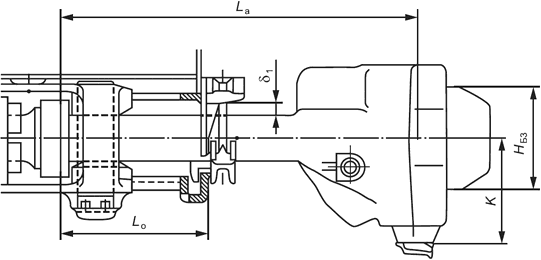
Рисунок А.4 - Установка автосцепки полужесткого типа с центрирующим прибором жесткого типа
А.5.3 При невыполнении условия по формуле (А.32) автосцепное устройство с автосцепкой полужесткого типа и центрирующим прибором жесткого типа не обеспечивает прохода сцепом вагонов вертикальных кривых и должно быть установлено на подвижной состав с центрирующим прибором с эластичной опорой хвостовика автосцепки.
А.5.4 Результаты расчета оформляют в виде графиков профиля пути (в соответствии с рисунком Б.1 или Б.2 приложения Б) и изменения разности высот автосцепок при движении сцепа по указанному профилю (в соответствии с рисунком А.2 или А.3), а также оценки обеспечения прохода на основании расчета по формуле (А.32).
А.6 Расчет прохода сцепом единиц четырехосного, шестиосного (на двух трехосных тележках) и восьмиосного (на двух четырехосных тележках) подвижного состава с автосцепкой полужесткого типа и центрирующим прибором с эластичной опорой хвостовика автосцепки
А.6.1 Таблицу формируют в соответствии с требованиями А.2 (для четырехосного подвижного состава), или А.3 (для шестиосного подвижного состава), или А.4 (для восьмиосного подвижного состава), кроме оценки результатов расчета, выполняемой в соответствии с А.6.2.
А.6.2 Оценку соответствия предъявляемым требованиям выполняют нижеприведенным образом.
Для подвижного состава с автосцепками полужесткого типа с центрирующим прибором с эластичной опорой хвостовика автосцепки проход по расчетному профилю пути считают обеспеченным при удовлетворении следующему условию:
![]() , (А.33)
, (А.33)
где ![]() - максимально возможная деформация пружин центрирующего прибора с эластичной опорой хвостовика, измеряемая на подвижном составе;
- максимально возможная деформация пружин центрирующего прибора с эластичной опорой хвостовика, измеряемая на подвижном составе;
![]() - расстояние от плоскости контакта упора с упорной плитой до оси маятниковых подвесок центрирующей балочки, измеряемое на подвижном составе.
- расстояние от плоскости контакта упора с упорной плитой до оси маятниковых подвесок центрирующей балочки, измеряемое на подвижном составе.
А.6.3 Результаты расчета оформляют в виде графиков профиля пути (в соответствии с рисунком Б.1 или Б.2 приложения Б) и изменения разности высот автосцепок при движении сцепа по указанному профилю (в соответствии с рисунком А.2 или А.3), а также оценки обеспечения прохода на основании расчета по формуле (А.33).
А.7 Расчет прохода сцепом единиц четырехосного подвижного состава со сцепкой (автосцепкой) жесткого типа и центрирующим прибором с эластичной опорой хвостовика автосцепки
А.7.1 Таблицу формируют нижеприведенным образом. В заголовках и подзаголовках колонок таблицы указывают наименования параметров в следующем порядке:
- координаты пути ![]() и
и ;
- координаты оси первой колесной пары ![]() и
и ![]() ;
;
- координаты оси второй колесной пары ![]() и
и ![]() ;
;
- координаты оси третьей колесной пары ![]() и
и ![]() ;
;
- координаты оси четвертой колесной пары ![]() и
и ![]() ;
;
- координаты пятника первой тележки ![]() и
и ![]() ;
;
- координаты пятника второй тележки ![]() и
и ![]() ;
;
- угол наклона продольной оси первой единицы подвижного состава ![]() ;
;
- координаты шарнира второй сцепки (автосцепки) первой единицы подвижного состава ![]() и
и ![]() .
.
В заголовках и подзаголовках последующих колонок указывают аналогичные данные для второй единицы подвижного состава:
- координаты пятой оси (оси первой колесной пары второй единицы подвижного состава) ![]() и
и ![]() ;
;
- координаты оси шестой колесной пары ![]() и
и ![]() ;
;
- координаты оси седьмой колесной пары ![]() и
и ![]() ;
;
- координаты оси восьмой колесной пары ![]() и
и ![]() ;
;
- координаты пятника третьей тележки (первой тележки второй единицы подвижного состава) ![]() и
и ![]() ;
;
- координаты пятника четвертой тележки ![]() и
и ![]() ;
;
- угол наклона продольной оси второй единицы подвижного состава ![]() ;
;
- координаты шарнира третьей сцепки (автосцепки) второй единицы подвижного состава ![]() и
и ![]() ;
;
- разность высот осей шарниров второй и третьей сцепок (автосцепок);
- угол наклона второй и третьей сцепок (автосцепок) относительно горизонтальной оси ![]() ;
;
- угол наклона второй сцепки (автосцепки) ![]() относительно продольной оси первой единицы подвижного состава;
относительно продольной оси первой единицы подвижного состава;
- угол наклона третьей сцепки (автосцепки) ![]() относительно продольной оси второй единицы подвижного состава.
относительно продольной оси второй единицы подвижного состава.
А.7.2 В колонках 1 и 2 приводят значения горизонтальных и вертикальных координат пути, рассчитанные по методу в соответствии с приложением Б.
А.7.3 Первую после заголовка строку таблицы заполняют следующим образом:
а) в ячейках с координатами оси первой колесной пары первой единицы подвижного состава ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , приведенными в этой же строке;
, приведенными в этой же строке;
б) в ячейках с координатами оси второй колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого выполняется условие, определенное по формуле (А.1);
, для которого выполняется условие, определенное по формуле (А.1);
в) в ячейках с координатами оси третьей колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого выполняется условие, определенное по формуле (А.2);
, для которого выполняется условие, определенное по формуле (А.2);
г) в ячейках с координатами оси четвертой колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого выполняется условие, определенное по формуле (А.3);
, для которого выполняется условие, определенное по формуле (А.3);
д) координаты пятника первой тележки ![]() и
и ![]() рассчитывают как средние значения горизонтальных и вертикальных координат первой и второй осей по формулам (А.4) и (А.5);
рассчитывают как средние значения горизонтальных и вертикальных координат первой и второй осей по формулам (А.4) и (А.5);
е) координаты пятника второй тележки ![]() и
и ![]() рассчитывают как средние значения горизонтальных и вертикальных координат третьей и четвертой осей по формулам (А.6) и (А.7);
рассчитывают как средние значения горизонтальных и вертикальных координат третьей и четвертой осей по формулам (А.6) и (А.7);
ж) угол наклона продольной оси первой единицы подвижного состава ![]() рассчитывают по координатам пятников тележек по формуле (А.8);
рассчитывают по координатам пятников тележек по формуле (А.8);
и) координаты шарнира второй сцепки (автосцепки) первой единицы подвижного состава ![]() и
и ![]() рассчитывают по формулам:
рассчитывают по формулам:
![]() ; (А.34)
; (А.34)
![]() , (А.35)
, (А.35)
где ![]() - длина сцепки (автосцепки) от оси шарнира до оси сцепления;
- длина сцепки (автосцепки) от оси шарнира до оси сцепления;
к) координаты осей и пятников второй единицы подвижного состава определяют аналогичным способом с учетом смещения вдоль оси пути на длину единицы подвижного состава по осям сцепления ![]() ;
;
л) в ячейках с координатами оси пятой колесной пары (оси первой колесной пары второй единицы подвижного состава) ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого выполняется условие, определенное по формуле (А.11);
, для которого выполняется условие, определенное по формуле (А.11);
м) в ячейках с координатами оси шестой колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого выполняется условие, определенное по формуле (А.12);
, для которого выполняется условие, определенное по формуле (А.12);
н) в ячейках с координатами оси седьмой колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого выполняется условие, определенное по формуле (А.13);
, для которого выполняется условие, определенное по формуле (А.13);
п) в ячейках с координатами оси восьмой колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого выполняется условие, определенное по формуле (А.14);
, для которого выполняется условие, определенное по формуле (А.14);
р) координаты пятника третьей тележки (первой тележки второй единицы подвижного состава) ![]() и
и ![]() рассчитывают как средние значения горизонтальных и вертикальных координат пятой и шестой осей по формулам (А.15) и (А.16);
рассчитывают как средние значения горизонтальных и вертикальных координат пятой и шестой осей по формулам (А.15) и (А.16);
с) координаты пятника четвертой тележки ![]() и
и ![]() рассчитывают как средние значения горизонтальных и вертикальных координат седьмой и восьмой осей по формулам (А.17) и (А.18);
рассчитывают как средние значения горизонтальных и вертикальных координат седьмой и восьмой осей по формулам (А.17) и (А.18);
т) угол наклона продольной оси второй единицы подвижного состава ![]() рассчитывают по координатам пятников тележек по формуле (А.19);
рассчитывают по координатам пятников тележек по формуле (А.19);
у) координаты шарнира третьей сцепки (автосцепки) второй единицы подвижного состава ![]() и
и ![]() рассчитывают по формулам:
рассчитывают по формулам:
![]() ; (А.36)
; (А.36)
![]() ; (А.37)
; (А.37)
ф) разность высот осей шарниров второй и третьей сцепок (автосцепок) ![]() рассчитывают по формуле
рассчитывают по формуле
![]() ; (А.38)
; (А.38)
х) угол наклона второй и третьей сцепок (автосцепок) ![]() относительно горизонтальной оси рассчитывают по формуле
относительно горизонтальной оси рассчитывают по формуле
![]() ; (А.39)
; (А.39)
ц) угол наклона второй сцепки (автосцепки) ![]() относительно продольной оси первой единицы подвижного состава рассчитывают по формуле
относительно продольной оси первой единицы подвижного состава рассчитывают по формуле
![]() ; (А.40)
; (А.40)
ч) угол наклона третьей сцепки (автосцепки) ![]() относительно продольной оси второй единицы подвижного состава рассчитывают по формуле
относительно продольной оси второй единицы подвижного состава рассчитывают по формуле
![]() . (А.41)
. (А.41)
А.7.4 Методом копирования ссылок и формул, указанных в перечислениях а)-ч) А.7.3, процедуру повторяют для всех последующих строк таблицы, содержащих значения горизонтальных и вертикальных координат пути в колонках 1 и 2.
А.7.5 После формирования таблицы по А.7.1-А.7.4 следует построить графики ![]() (
(![]() ) и
) и ![]() (
(![]() ) в интервале от 20 до 70 м (для сортировочной горки) и от 20 до 90 м (для аппарели парома) с целью контроля правильности формул и данных в табличном редакторе компьютера (ошибки вызывают искажение формы кривых). Координату
) в интервале от 20 до 70 м (для сортировочной горки) и от 20 до 90 м (для аппарели парома) с целью контроля правильности формул и данных в табличном редакторе компьютера (ошибки вызывают искажение формы кривых). Координату ![]() рассчитывают по формуле (А.20). Примеры приведены на рисунках А.5 и А.6.
рассчитывают по формуле (А.20). Примеры приведены на рисунках А.5 и А.6.
|
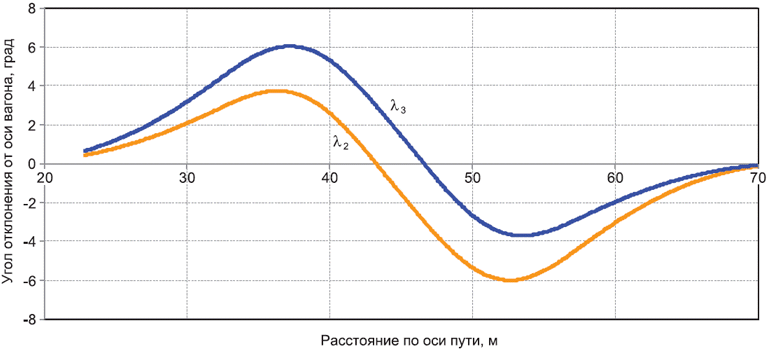
Рисунок А.5 - График изменения углов отклонения осей сцепок (автосцепок) в вертикальной плоскости ![]() (
(![]() ) и
) и ![]() (
(![]() ) при движении сцепа по сортировочной горке
) при движении сцепа по сортировочной горке
|
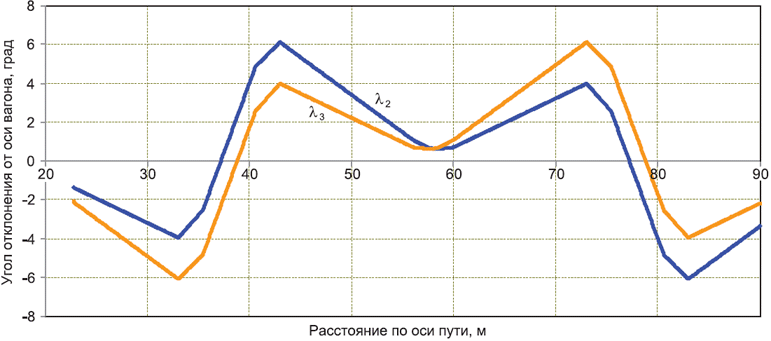
Рисунок А.6 - График изменения углов отклонения осей сцепок (автосцепок) в вертикальной плоскости ![]() (
(![]() ) и
) и ![]() (
(![]() ) при движении сцепа по аппарели парома
) при движении сцепа по аппарели парома
А.7.6 Оценку соответствия предъявляемым требованиям выполняют нижеприведенным образом.
Максимальные углы отклонения сцепок (автосцепок) относительно продольных осей единиц подвижного состава, на котором они установлены, рассчитывают с учетом исходной разности высот ![]() единиц железнодорожного подвижного состава перед сцеплением по формулам:
единиц железнодорожного подвижного состава перед сцеплением по формулам:
![]() ; (А.42)
; (А.42)
![]() . (А.43)
. (А.43)
В качестве исходной разности высот ![]() в расчете принимают значение, установленное для испытуемого подвижного состава.
в расчете принимают значение, установленное для испытуемого подвижного состава.
Для подвижного состава со сцепками и автосцепками жесткого типа проход по расчетному профилю пути считают обеспеченным в том случае, если конструкция шарнира предоставляет возможность отклонения сцепки (автосцепки), установленной на единице подвижного состава, вверх и вниз на углы, большие или равные максимальным значениям ![]() и
и ![]() , рассчитанным по формулам (А.42) и (А.43).
, рассчитанным по формулам (А.42) и (А.43).
А.7.7 Результаты расчета оформляют в виде графиков профиля пути в соответствии с рисунком Б.1 или Б.2 приложения Б и изменения углов отклонения осей сцепок (автосцепок) в вертикальной плоскости при движении сцепа по указанному профилю (в соответствии с рисунком А.5 или А.6), а также оценки обеспечения прохода на основании расчета по формулам (А.42) и (А.43).
А.8 Расчет прохода сцепом вагонов сочлененного типа
А.8.1 Расчет относительных вертикальных перемещений сцепок между двумя вагонами сочлененного типа
А.8.1.1 Таблицу формируют нижеприведенным образом. В заголовках и подзаголовках колонок таблицы указывают наименования параметров в следующем порядке:
- координаты пути ![]() и
и ;
- координаты оси третьей колесной пары ![]() и
и ![]() ;
;
- координаты оси четвертой колесной пары ![]() и
и ![]() ;
;
- координаты оси пятой колесной пары ![]() и
и ![]() ;
;
- координаты оси шестой колесной пары ![]() и
и ![]() ;
;
- координаты пятника второй тележки ![]() и
и ![]() ;
;
- координаты пятника третьей тележки ![]() и
и ![]() ;
;
- угол наклона продольной оси второй секции первой единицы подвижного состава ![]() ;
;
- координаты точки пересечения продольной оси второй секции первой единицы подвижного состава и оси сцепления второй автосцепки первой единицы подвижного состава ![]() и
и ![]() .
.
В заголовках и подзаголовках последующих колонок указывают аналогичные данные для второй единицы подвижного состава:
- координаты седьмой оси (оси первой колесной пары второй единицы подвижного состава) ![]() и
и ![]() ;
;
- координаты оси восьмой колесной пары ![]() и
и ![]() ;
;
- координаты оси девятой колесной пары ![]() и
и ![]() ;
;
- координаты оси десятой колесной пары ![]() и
и ![]() ;
;
- координаты пятника четвертой тележки (первой тележки второй единицы подвижного состава) ![]() и
и ![]() ;
;
- координаты пятника пятой тележки ![]() и
и ![]() ;
;
- угол наклона продольной оси первой секции второй единицы подвижного состава ![]() ;
;
- координаты точки пересечения продольной оси первой секции второй единицы подвижного состава и оси сцепления третьей автосцепки (первой автосцепки первой секции второй единицы подвижного состава) ![]() и
и ![]() ;
;
- разность высот осей второй и третьей автосцепок ![]() .
.
А.8.1.2 В колонках 1 и 2 приводят значения горизонтальных и вертикальных координат пути, рассчитанные по методу в соответствии с приложением Б.
А.8.1.3 Первую после заголовка строку таблицы заполняют следующим образом:
а) в ячейках с координатами оси третьей колесной пары первой единицы подвижного состава ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , приведенными в этой же строке;
, приведенными в этой же строке;
б) в ячейках с координатами оси четвертой колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() , (А.44)
, (А.44)
где ![]() - база тележки единицы подвижного состава;
- база тележки единицы подвижного состава;
в) в ячейках с координатами оси пятой колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() , (А.45)
, (А.45)
где ![]() - база секции вагона (расстояние между центрами пятников секции вагона);
- база секции вагона (расстояние между центрами пятников секции вагона);
г) в ячейках с координатами оси шестой колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() ; (А.46)
; (А.46)
д) координаты пятника второй тележки ![]() и
и ![]() рассчитывают как средние значения горизонтальных и вертикальных координат третьей и четвертой осей по формулам:
рассчитывают как средние значения горизонтальных и вертикальных координат третьей и четвертой осей по формулам:
![]() ; (А.47)
; (А.47)
![]() ; (А.48)
; (А.48)
е) координаты пятника третьей тележки ![]() и
и ![]() рассчитывают как средние значения горизонтальных и вертикальных координат пятой и шестой осей по формулам:
рассчитывают как средние значения горизонтальных и вертикальных координат пятой и шестой осей по формулам:
![]() ; (А.49)
; (А.49)
![]() ; (А.50)
; (А.50)
ж) угол наклона ![]() продольной оси второй секции первой единицы подвижного состава рассчитывают по координатам пятников тележек по формуле
продольной оси второй секции первой единицы подвижного состава рассчитывают по координатам пятников тележек по формуле
![]() ; (А.51)
; (А.51)
и) координаты точки пересечения продольной оси второй секции первой единицы подвижного состава и оси сцепления второй автосцепки второй секции первой единицы подвижного состава для автосцепки нежесткого типа ![]() и
и ![]() рассчитывают по формулам:
рассчитывают по формулам:
![]() ; (А.52)
; (А.52)
![]() , (А.53)
, (А.53)
где ![]() - длина секции единицы подвижного состава между осью шарнирного соединительного устройства секций единицы подвижного состава и осью сцепления автосцепки;
- длина секции единицы подвижного состава между осью шарнирного соединительного устройства секций единицы подвижного состава и осью сцепления автосцепки;
к) координаты осей и пятников второй единицы подвижного состава определяют аналогичным способом с учетом смещения вдоль оси пути на длину единицы подвижного состава по осям сцепления ![]() и длины консоли, равной (
и длины консоли, равной (![]() );
);
л) в ячейках с координатами для оси седьмой колесной пары (оси первой колесной пары второй единицы подвижного состава) ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() ; (А.54)
; (А.54)
м) в ячейках с координатами оси восьмой колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() ; (А.55)
; (А.55)
н) в ячейках с координатами оси девятой колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() ; (А.56)
; (А.56)
п) в ячейках с координатами оси десятой колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() ; (А.57)
; (А.57)
р) координаты пятника четвертой тележки (первой тележки второй единицы подвижного состава) ![]() и
и ![]() рассчитывают как средние значения горизонтальных и вертикальных координат седьмой и восьмой осей по формулам:
рассчитывают как средние значения горизонтальных и вертикальных координат седьмой и восьмой осей по формулам:
![]() ; (А.58)
; (А.58)
![]() ; (А.59)
; (А.59)
с) координаты пятника пятой тележки ![]() и
и ![]() рассчитывают как средние значения горизонтальных и вертикальных координат девятой и десятой осей по формулам:
рассчитывают как средние значения горизонтальных и вертикальных координат девятой и десятой осей по формулам:
![]() ; (А.60)
; (А.60)
![]() ; (А.61)
; (А.61)
т) угол наклона продольной оси первой секции второй единицы подвижного состава ![]() рассчитывают по координатам пятников тележек по формуле
рассчитывают по координатам пятников тележек по формуле
![]() ; (А.62)
; (А.62)
у) координаты точки пересечения продольной оси единицы подвижного состава и оси сцепления третьей автосцепки (первой автосцепки второй единицы подвижного состава) для автосцепки нежесткого типа ![]() и
и ![]() рассчитывают по формулам:
рассчитывают по формулам:
![]() ; (А.63)
; (А.63)
![]() (А.64)
(А.64)
(во всех случаях должно быть выполнено условие ![]() , его невыполнение свидетельствует о допущенной ошибке);
, его невыполнение свидетельствует о допущенной ошибке);
ф) разность высот осей автосцепок в точке с координатой по оси пути ![]() , соответствующей
, соответствующей ![]() , рассчитывают по формуле
, рассчитывают по формуле
![]() . (А.65)
. (А.65)
А.8.1.4 Методом копирования ссылок и формул, указанных в перечислениях а)-ф) А.8.1.3, процедуру повторяют для всех последующих строк таблицы, содержащих значения горизонтальных и вертикальных координат пути в колонках 1 и 2.
А.8.1.5 После формирования таблицы по А.8.1.1-А.8.1.4 с целью контроля следует построить график ![]() (
(![]() ) в интервале от 20 до 70 м (для сортировочной горки) и от 20 до 90 м (для аппарели парома). Примеры приведены на рисунках А.2 и А.3.
) в интервале от 20 до 70 м (для сортировочной горки) и от 20 до 90 м (для аппарели парома). Примеры приведены на рисунках А.2 и А.3.
А.8.1.6 Оценку соответствия предъявляемым требованиям выполняют в соответствии с А.2.6 или А.5.2, или А.6.2, в зависимости от типа автосцепки и центрирующего прибора.
А.8.1.7 Результаты расчета оформляют в виде графиков профиля пути (в соответствии с рисунком Б.1 или Б.2 приложения Б) и изменения разности высот автосцепок при движении сцепа по указанному профилю (в соответствии с рисунком А.2 или А.3), а также оценки обеспечения прохода на основании расчета по формуле (А.23) или (А.32), или (А.33), в зависимости от типа автосцепки и центрирующего прибора.
А.8.2 Расчет угла поворота шарнирного соединительного устройства секций вагона в вертикальной плоскости
А.8.2.1 Таблицу формируют нижеприведенным образом. В заголовках и подзаголовках колонок таблицы указывают наименования параметров в следующем порядке:
- координаты пути ![]() и
и ;
- координаты оси первой колесной пары ![]() и
и ![]() ;
;
- координаты оси второй колесной пары ![]() и
и ![]() ;
;
- координаты оси третьей колесной пары ![]() и
и ![]() ;
;
- координаты оси четвертой колесной пары ![]() и
и ![]() ;
;
- координаты пятника первой тележки ![]() и
и ![]() ;
;
- координаты пятника второй тележки ![]() и
и ![]() ;
;
- угол наклона продольной оси первой секции единицы подвижного состава ![]() ;
;
- координаты пятой оси колесной пары ![]() и
и ![]() ;
;
- координаты шестой оси колесной пары ![]() и
и ![]() ;
;
- координаты пятника третьей тележки ![]() и
и ![]() ;
;
- угол наклона продольной оси второй секции единицы подвижного состава ![]() ;
;
- угол поворота секций вагона в вертикальной плоскости в шарнирном соединительном устройстве ![]() .
.
А.8.2.2 В колонках 1 и 2 приводят значения горизонтальных и вертикальных координат пути, рассчитанные по методу в соответствии с приложением Б.
А.8.2.3 Первую после заголовка строку таблицы заполняют следующим образом:
а) в ячейках с координатами оси первой колесной пары первой единицы подвижного состава ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , приведенными в этой же строке;
, приведенными в этой же строке;
б) в ячейках с координатами оси второй колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() , (А.66)
, (А.66)
где ![]() - база тележки единицы подвижного состава;
- база тележки единицы подвижного состава;
в) в ячейках с координатами оси третьей колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() , (А.67)
, (А.67)
где ![]() - база секции вагона;
- база секции вагона;
г) в ячейках с координатами оси четвертой колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() ; (А.68)
; (А.68)
д) координаты пятника первой тележки ![]() и
и ![]() рассчитывают как средние значения горизонтальных и вертикальных координат первой и второй осей по формулам:
рассчитывают как средние значения горизонтальных и вертикальных координат первой и второй осей по формулам:
![]() ; (А.69)
; (А.69)
![]() ; (А.70)
; (А.70)
е) координаты пятника второй тележки ![]() и
и ![]() рассчитывают как средние значения горизонтальных и вертикальных координат третьей и четвертой осей по формулам:
рассчитывают как средние значения горизонтальных и вертикальных координат третьей и четвертой осей по формулам:
![]() ; (А.71)
; (А.71)
![]() . (А.72)
. (А.72)
Координаты центра шарнирного соединительного устройства совпадают с координатами пятника второй тележки ![]() и
и ![]() ;
;
ж) угол наклона продольной оси первой секции единицы подвижного состава ![]() по координатам пятников тележек рассчитывают по формуле
по координатам пятников тележек рассчитывают по формуле
![]() ; (А.73)
; (А.73)
и) в ячейках с координатами для оси пятой колесной пары (оси первой колесной пары второй единицы подвижного состава) ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() ; (А.74)
; (А.74)
к) в ячейках с координатами оси шестой колесной пары ![]() и
и ![]() указывают ссылки на ячейки с координатами участка пути
указывают ссылки на ячейки с координатами участка пути ![]() и
и ![]() , для которого
, для которого
![]() ; (А.75)
; (А.75)
л) координаты пятника третьей тележки ![]() и
и ![]() рассчитывают как средние значения горизонтальных и вертикальных координат пятой и шестой осей по формулам:
рассчитывают как средние значения горизонтальных и вертикальных координат пятой и шестой осей по формулам:
![]() ; (А.76)
; (А.76)
![]() ; (А.77)
; (А.77)
м) угол наклона продольной оси второй секции единицы подвижного состава ![]() по координатам пятников тележек рассчитывают по формуле
по координатам пятников тележек рассчитывают по формуле
![]() ; (А.78)
; (А.78)
н) угол поворота секций вагона ![]() в вертикальной плоскости в шарнирном соединительном устройстве рассчитывают по формуле
в вертикальной плоскости в шарнирном соединительном устройстве рассчитывают по формуле
![]() . (А.79)
. (А.79)
А.8.2.4 Методом копирования ссылок и формул, указанных в перечислениях а)-н) А.8.2.3, процедуру повторяют для всех последующих строк таблицы, содержащих значения горизонтальных и вертикальных координат пути в колонках 1 и 2.
А.8.2.5 После формирования таблицы по А.8.2.1-А.8.2.4 с целью контроля следует построить график ![]() (
(![]() ) в интервале от 20 до 70 м (для сортировочной горки) и от 20 до 90 м (для аппарели парома). Примеры приведены на рисунках А.5 и А.6.
) в интервале от 20 до 70 м (для сортировочной горки) и от 20 до 90 м (для аппарели парома). Примеры приведены на рисунках А.5 и А.6.
А.8.2.6 Оценку соответствия предъявляемым требованиям выполняют следующим образом:
- прохождение считают обеспеченным, если конструкция шарнира допускает возможность взаимного поворота секций вагона в вертикальной плоскости на угол, больший или равный максимальному значению ![]() , рассчитанному по формуле (А.79).
, рассчитанному по формуле (А.79).
А.8.2.7 Результаты расчета оформляют в виде графиков профиля пути (в соответствии с рисунком Б.1 или Б.2 приложения Б) и изменения угла поворота секций вагона в вертикальной плоскости в шарнирном соединительном устройстве при движении сцепа по указанному профилю (в соответствии с рисунком А.7 или А.8).
|
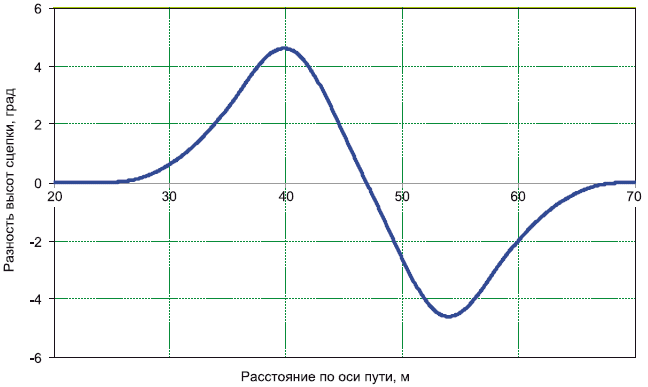
Рисунок А.7 - График изменения угла поворота секций вагона в вертикальной плоскости ![]() (
(![]() ) при движении по сортировочной горке
) при движении по сортировочной горке
|
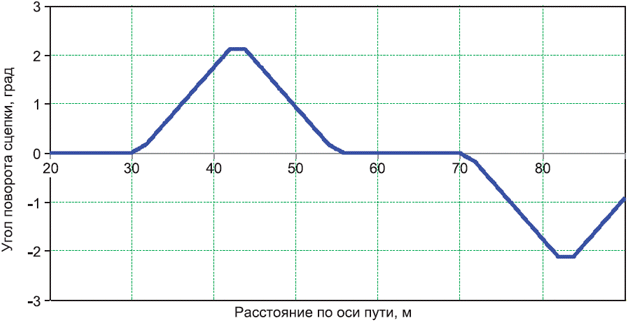
Рисунок А.8 - График изменения угла поворота секций вагона в вертикальной плоскости ![]() (
(![]() ) при движении по аппарели парома
) при движении по аппарели парома
Приложение Б
(обязательное)
Метод формирования массива исходных данных профиля пути вертикальных кривых
Б.1 Массив исходных данных профиля пути сортировочной горки и аппарели парома формируют на компьютере в табличном редакторе.
Б.2 Массив исходных данных профиля пути сортировочной горки для расчета прохода сцепом единиц подвижного состава формируют из трех участков:
- путь надвига с уклоном 15‰ (![]() =0,015);
=0,015);
- кривая сопряжения радиусом 250 м пути надвига и пути роспуска с переломом профиля 55‰;
- путь роспуска с уклоном минус 40‰ (![]() =-0,040).
=-0,040).
Б.3 Формируют колонку 1 с координатами по горизонтали ![]() в интервале от 0 до 100 м с шагом
в интервале от 0 до 100 м с шагом ![]() =0,05 м по формуле
=0,05 м по формуле
![]() . (Б.1)
. (Б.1)
Б.4 Формируют колонку 2 с координатами по вертикали пути надвига в интервале от 0 до 40 м по формуле
![]() . (Б.2)
. (Б.2)
Точка с координатами ![]() ,
, ![]() со значением
со значением ![]() , равным 40 м, является точкой сопряжения пути надвига с вертикальной кривой.
, равным 40 м, является точкой сопряжения пути надвига с вертикальной кривой.
Б.5 Формирование массива данных кривой сопряжения радиусом ![]() =250 м выполняют нижеприведенным образом.
=250 м выполняют нижеприведенным образом.
Б.5.1 Определяют расстояние по горизонтали и вертикали от точки сопряжения пути надвига с вертикальной кривой до горба горки ![]() ,
, ![]() по формулам
по формулам
![]() ; (Б.3)
; (Б.3)
![]() . (Б.4)
. (Б.4)
Б.5.2 Формируют колонку 3 с текущими значениями угла наклона пути ![]() на участке кривой сопряжения радиусом
на участке кривой сопряжения радиусом ![]() , равным 250 м, по формуле
, равным 250 м, по формуле
![]() . (Б.5)
. (Б.5)
Б.5.3 Формируют колонку 2 с текущими значениями координат по вертикали пути надвига на участке кривой сопряжения радиусом
![]() , равным 250 м, по формуле
, равным 250 м, по формуле
![]() . (Б.6)
. (Б.6)
Б.5.4 Вертикальная кривая сопрягается со спускной частью при достижении перелома профиля пути 55‰, при котором угол наклона пути роспуска ![]() (-0,040).
(-0,040).
Б.6 Формируют колонку 2 с координатами по вертикали пути роспуска по формуле
![]() . (Б.7)
. (Б.7)
Б.7 После формирования массива исходных данных профиля пути сортировочной горки следует построить график ![]() в соответствии с рисунком Б.1 с целью контроля правильности формул и данных в табличном редакторе компьютера (ошибки вызывают искажение формы кривых).
в соответствии с рисунком Б.1 с целью контроля правильности формул и данных в табличном редакторе компьютера (ошибки вызывают искажение формы кривых).
|
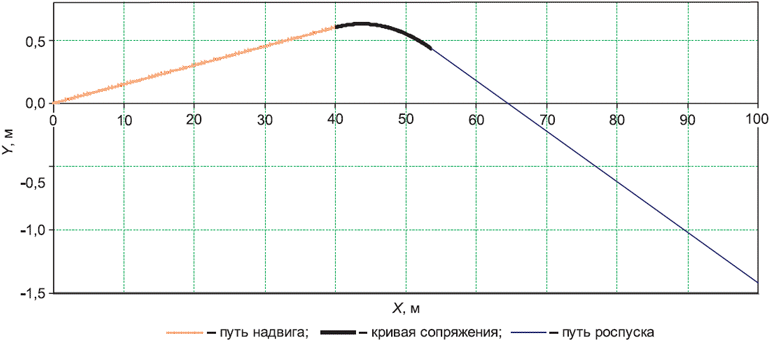
Рисунок Б.1 - График профиля пути сортировочной горки ![]()
Б.8 Массив исходных данных профиля пути аппарели парома для расчета прохода сцепом единиц подвижного состава формируют из трех участков:
- горизонтальный участок;
- аппарель с уклоном 40‰ (![]() =0,040);
=0,040);
- горизонтальный участок.
Б.9 Формируют колонку 1 с координатами по горизонтали ![]() в интервале от 0 до 120 м с шагом
в интервале от 0 до 120 м с шагом ![]() =0,05 м по формуле (Б.1).
=0,05 м по формуле (Б.1).
Б.10 Формируют колонку 2 с координатами по вертикали горизонтального участка пути в интервале от 0 до 40 м по формуле
![]() . (Б.8)
. (Б.8)
Б.11 Формируют колонку 2 с координатами по вертикали пути аппарели в интервале от 40 до 80 м по формуле (Б.2).
Б.12 Формируют колонку 2 с координатами по вертикали горизонтального участка пути в интервале от 80 до 120 м по формуле (Б.8).
Б.13 После формирования массива исходных данных профиля пути аппарели парома следует построить график ![]() в соответствии с рисунком Б.2 с целью контроля правильности формул и данных в табличном редакторе компьютера (ошибки вызывают искажение формы кривых).
в соответствии с рисунком Б.2 с целью контроля правильности формул и данных в табличном редакторе компьютера (ошибки вызывают искажение формы кривых).
|
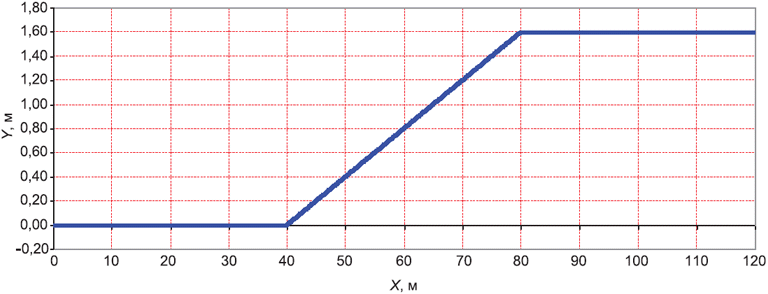
Рисунок Б.2 - График профиля пути аппарели парома ![]()
Приложение В
(справочное)
Перечень средств измерений, необходимых для контроля сцепления и прохождения железнодорожным подвижным составом кривых в сцепленном состоянии
Перечень средств измерений, необходимых для контроля сцепляемости и прохождения железнодорожным подвижным составом кривых в сцепленном состоянии, приведен в таблице В.1.
Таблица В.1
Средства измерений | Нормативный документ |
Штангенциркули ШЦ-I-125-0,1, ШЦ-I-150-0,1, ШЦ-I-250-0,1 | ГОСТ 166 |
Линейки измерительные металлические с пределом измерений от 0 до 300 мм, от 0 до 500 мм | ГОСТ 427 |
Рулетка измерительная металлическая с пределом измерений от 0 до 10 м | ГОСТ 7502 |
Примечание - При проведении измерений возможно использование другого измерительного оборудования, в т.ч. и цифровых систем, с точностью измерения не ниже, чем средств измерений, указанных в таблице. Условия работы средств измерений должны соответствовать их паспортным характеристикам. | |
Библиография
[1] | Инструкция по ремонту и обслуживанию автосцепного устройства подвижного состава железных дорог. Утверждена решением 53-го заседания Совета по железнодорожному транспорту государств - участников Содружества от 20-21 октября 2010 г. (с изменениями и дополнениями, утвержденными 65-м заседанием Совета от 26-27 октября 2016 г.) |
УДК 629.4:006.354 | МКС 45.060 |
Ключевые слова: железнодорожный подвижной состав, сцепное, автосцепное устройство, методы контроля сцепляемости и прохождения кривых, метод расчета прохода сцепа по вертикальным кривым | |
Редакция документа с учетом
изменений и дополнений подготовлена
{kind=link}