ПНСТ 521-2021
(ИСО/МЭК 30140-1:2018)
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Информационные технологии
ПОДВОДНАЯ АКУСТИЧЕСКАЯ СЕНСОРНАЯ СЕТЬ
Часть 1
Общие положения
Information technology. Underwater acoustic sensor network. Part 1. General provisions
ОКС 35.110
Срок действия с 2021-07-01
до 2024-07-01
Предисловие
1 ПОДГОТОВЛЕН Акционерным обществом "Всероссийский научно-исследовательский институт сертификации" (АО "ВНИИС") и Акционерным обществом "Российская венчурная компания" (АО "РВК") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 194 "Кибер-физические системы"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 28 января 2021 г. N 10-пнст
4 Настоящий стандарт идентичен международному стандарту ИСО/МЭК 30140-1:2018* "Информационные технологии. Подводная акустическая сенсорная сеть (UWASN). Часть 1. Общие положения и требования" (ISO/IEC 30140-1:2018 "Information technology - Underwater acoustic sensor network (UWASN) - Part 1: Overview and requirements", MOD) путем включения структурных элементов, которые выделены в тексте курсивом**. Внесение указанных технических отклонений направлено на учет потребностей национальной экономики Российской Федерации.
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5).
Сведения о соответствии ссылочных национальных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте, приведены в дополнительном приложении ДА
5 Некоторые элементы настоящего стандарта могут быть объектами патентных прав. Федеральное агентство по техническому регулированию и метрологии не несет ответственности за установление подлинности каких-либо или всех таких патентных прав
Правила применения настоящего стандарта и проведения его мониторинга установлены в ГОСТ Р 1.16-2011** (разделы 5 и 6).
Федеральное агентство по техническому регулированию и метрологии собирает сведения о практическом применении настоящего стандарта. Данные сведения, а также замечания и предложения по содержанию стандарта можно направить не позднее чем за 4 мес до истечения срока его действия разработчику настоящего стандарта по адресу: 121205 Москва, Инновационный центр Сколково, ул.Нобеля, д.1, e-mail: [email protected] и/или в Федеральное агентство по техническому регулированию и метрологии по адресу: 123112 Москва, Пресненская набережная, д.10, стр.2.
В случае отмены настоящего стандарта соответствующая информация будет опубликована в ежемесячном информационном указателе "Национальные стандарты" и будет размещена на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет ()
Введение
Вода покрывает примерно 71% поверхности Земли. Современные технологии обеспечивают новые методы мониторинга водоемов, например, мониторинг и обнаружение загрязнений. Для подводных методов сбора данных требуется исследование водной среды, что может быть выполнено наиболее эффективно при использовании подводных акустических сенсорных сетей (UWASN). Приложения, разработанные для UWASN, могут регистрировать подводный климат, обнаруживать и контролировать загрязнение воды, проводить наблюдения за морской биологией, проводить открытие природных ресурсов, обнаруживать утечки в трубопроводах, осуществлять контроль и обнаруживать подводных нарушителей, проводить стратегическое наблюдение и т.д.
Серия ПНСТ "Информационные технологии. Подводная акустическая сенсорная сеть" устанавливает общие требования и типовую архитектуру (RA), включая модели сущностей и рекомендации для высокоуровневых интерфейсов по обеспечению совместимости между UWASN. Целью серии ПНСТ "Информационные технологии. Подводная акустическая сенсорная сеть" является предоставление архитекторам, разработчикам и исполнителям UWASN основополагающей информации о структуре UWASN.
Серия ПНСТ "Информационные технологии. Подводная акустическая сенсорная сеть" предоставляет высокоуровневые функциональные модели, связанные с подводными сенсорными узлами, и взаимосвязи между узлами для построения архитектурного представления UWASN. Следует отметить, что указанная серия ПНСТ не связана с областью применения, в серии ПНСТ не определены ни типы сигналов связи для использования в UWASN, ни подводные акустические частоты связи. Определение формы колебаний и/или частот сигнала связи является ответственностью архитекторов, проектировщиков и разработчиков*.
________________
* Рекомендуется предусмотреть наличие полосы аварийных частот подводных лодок около и ниже 12 кГц в проектах и приложениях UWASN.
При передаче акустических данных в сенсорных сетях акустические сигналы охватывают полосы биологически важных частот в рассматриваемой окружающей среде. Такие сигналы могут противоречить региональным, национальным или международным нормам воздействия шума. Разработчики сетей акустической связи должны проконсультироваться с соответствующими регулирующими органами перед проектированием и развертыванием таких систем для соблюдения норм и во избежание конфликтов с соответствующими органами.
Целью серии ПНСТ "Информационные технологии. Подводная акустическая сенсорная сеть" является предоставление общих требований и рекомендаций для проектирования и разработки приложений и служб UWASN.
1 Область применения
Настоящий стандарт содержит общие положения о подводных акустических сенсорных сетях (UWASN). В настоящем стандарте определены основные характеристики с точки зрения влияния вариабельности распространения и проанализированы основные различия UWASN от наземных сетей. В настоящем стандарте определены особенности UWASN, и сформулированы конкретные и общие требования к UWASN.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ПНСТ 519-2021 (ИСО/МЭК 29182-2:2013) Информационные технологии. Сети сенсорные. Часть 2. Термины и определения
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ПНСТ 519-2021, а также следующие термины.
3.1 узел ad-hoc (ad-hoc node): Устройство в беспроводной динамической ad-hoc сети.
Примечание - В [1] "беспроводная динамическая Ad-hoc сеть" определена как "децентрализованная беспроводная сеть, не имеющая постоянной структуры".
3.2 межуровневость (cross-layer): Технология, которая обеспечивает передачу данных между различными уровнями с предоставлением одному уровню доступа к данным другого уровня для обмена информацией и обеспечения взаимодействия.
3.3 межуровневое управление (management cross-layer): Технология, предоставляющая службу управления на уровне системы для всех или выбранных уровней OSI* в системе беспроводной сети.
________________
* Модель OSI (модель взаимодействия открытых систем, Open Systems Interconnection) - абстрактная сетевая модель для коммуникаций и разработки сетевых протоколов.
Примечание - Примерами межуровневого управления являются межуровневое управление устройствами, межуровневое управление сетью, межуровневое управление QoS, межуровневое управление безопасностью, межуровневое управление локализацией, межуровневое управление питанием и т.д.
3.4 подводная акустическая основная сеть (UWA-FN) (underwater acoustic fundamental network): Беспроводная сеть передачи данных, которая построена на основе одной или нескольких либо исключительно кластерных сетей, либо исключительно динамических ad-hoc сетей для подводной окружающей среды с использованием акустических модемов.
Примечания
1 Основная сеть включает только из один тип сети: либо кластерная сеть, либо динамическая ad-hoc сеть.
2 Беспроводная акустическая передача данных и каналы передачи данных реализованы с использованием акустического модема.
3 В ГОСТ 33707 "модем" определен как "устройство, преобразующее цифровые сигналы в аналоговую форму и обратно для передачи их по линиям связи аналогичного типа".
3.5 подводная акустическая объединенная сеть (UWA-UN) (underwater acoustic united network): Беспроводная сеть передачи данных, состоящая из двух или более подводных акустических основных сетей (см. 3.4) и ретрансляционных узлов.
Примечание - Ретрансляционным узлом является, например, беспилотный подводный аппарат, узел связи, маяк и т.д.
3.6 подводная акустическая расширенная объединенная сеть (UWA-EUN) (underwater acoustic extended united network): Беспроводная сеть передачи данных, состоящая из двух или более подводных акустических объединенных сетей (см. 3.5).
3.7
подводный акустический сенсорный узел (UWA-SNode) (underwater acoustic sensor node): Элемент сенсорной сети, который включает в себя как минимум один датчик и необязательные исполнительные устройства, имеющий возможности передачи и обработки данных и который построен для подводных приложений с использованием акустического модема в качестве внутреннего элемента связи. Примечания 1 Беспроводная акустическая передача данных и каналы передачи данных реализованы с использованием акустического модема. 2 В ГОСТ 33707 "модем" определен как "устройство, преобразующее цифровые сигналы в аналоговую форму и обратно для передачи их по линиям связи аналогичного типа". [ПНСТ 519-2021, статья 3.31] |
3.8 головной подводный акустический узел кластера (UWA-CH) (underwater acoustic cluster head): Блок, который получает данные от подводных акустических сенсорных узлов (см. 3.7) и передает данные в один или несколько ретрансляционных узлов или ближайший подводный акустический шлюз (см. 3.9).
3.9
подводный акустический шлюз (UWA-GW) (underwater acoustic gateway): Блок, соединяющий различные подводные сети или части одной подводной сети и выполняющий необходимые преобразования протоколов в подводной окружающей среде с использованием акустического модема. [[2], 3.1.88.3] |
4 Сокращения и обозначения
В настоящем стандарте применены следующие сокращения:
2D - двухмерный (two dimensional);
3D - трехмерный (three dimensional);
DG - группа удаленности (distance group);
DTN - сеть, устойчивая к задержкам и разрывам (delay and disruption tolerant network);
GPS - глобальная система определения местоположения (global positioning System);
LED - светоизлучающий диод (light emitting diode);
MCCP - протокол кластеризации с минимальными издержками (minimum cost clustering protocol);
QoS - качество обслуживания (quality of service);
RF - радиочастота (radio frequency);
RSS - уровень мощности принимаемого сигнала (received signal strength);
UUV - беспилотный подводный аппарат (unmanned underwater vehicle);
UWASN - подводная акустическая сенсорная сеть (underwater acoustic sensor network);
UWA-CH - головной подводный акустический узел кластера (underwater acoustic cluster head);
UWA-DTN - подводная сеть, устойчивая к задержкам (underwater delay tolerant network);
UWA-DTN-GW - шлюз подводной DTN (underwater DTN gateway);
UWA-EUN - подводная акустическая расширенная объединенная сеть (underwater acoustic extended united network);
UWA-FN - подводная акустическая основная сеть (underwater acoustic fundamental network);
UWA-GW - подводный акустический шлюз (underwater acoustic gateway);
UWA-SNode - подводный акустический сенсорный узел (underwater acoustic sensor node);
UWA-UN - подводная акустическая объединенная сеть (underwater acoustic united network).
5 Общие положения и области применения UWASN
5.1 Общие положения
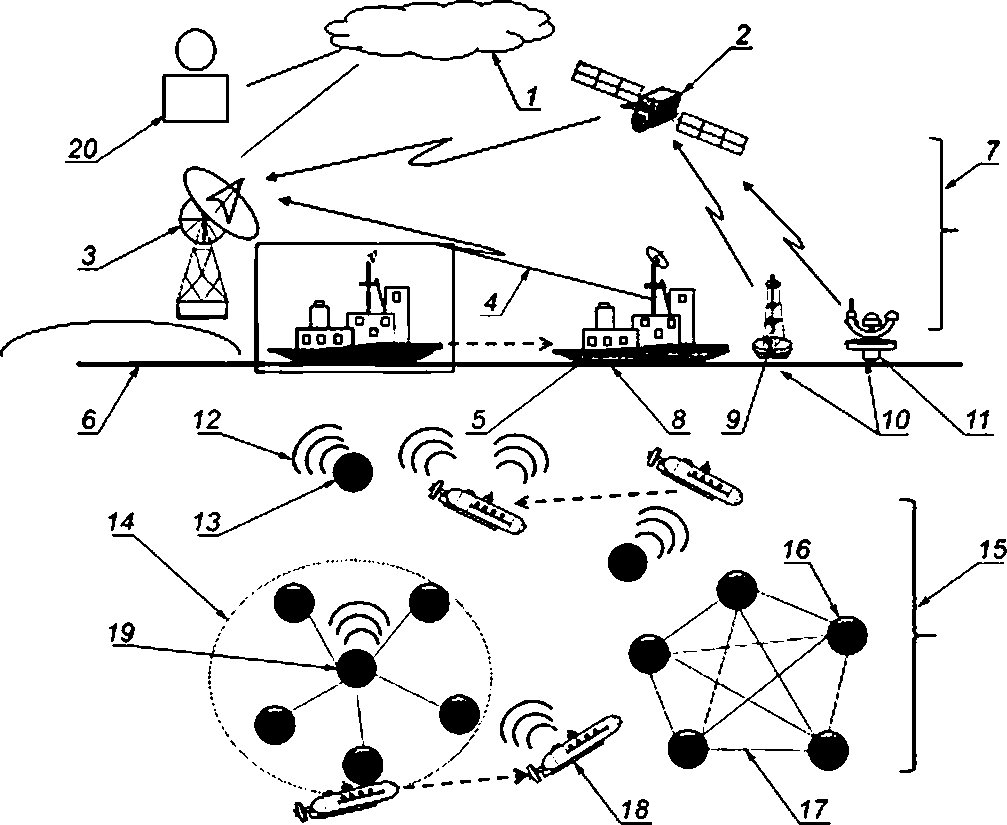
На рисунке 1 показана базовая топология UWASN. В кластерной сети данные, измеряемые подводными акустическими сенсорными узлами (UWA-SNode), передаются через акустическую связь на подводный акустический шлюз (UWA-GW) с использованием головного подводного акустического узла кластера (UWA-CH), беспилотного подводного аппарата (UUV) или ретрансляционных узлов. Пользователи получают передаваемые данные через различные внешние сети (например, радиочастотную (RF) или спутниковую связь). Подводная передача данных осуществляется посредством акустической связи. UWA-GW являются движущимися или фиксированными узлами. Топологии и модели конфигурации передачи данных могут быть адаптивно изменены в любой момент времени в зависимости от потребностей области применения.
 |
1 - Интернет; 2 - спутник; 3 - базовая станция; 4 - линия RF передачи; 5 - движущийся шлюз; 6 - поверхность; 7 - RF; 8 - UWA-GW; 9 - буй; 10 - фиксированные шлюзы; 11 - UWA-DTN-GW; 12 - акустический канал; 13 - ретрансляционный узел; 14 - кластер; 15 - подводная среда; 16 - UWA-SNode; 17 - Ad-hoc сеть; 18 - UYV; 19 - UWA-CH; 20 - пользователь
Рисунок 1 - Общая схема UWASN
Радиочастотные системы связи используются в наземных сенсорных сетях ввиду их высокой эффективности и низкой стоимости. В подводной среде радиочастотная связь сложна из-за ограниченных характеристик распространения волн вследствие высокого затухания из-за проводимости воды. Подводная связь может быть обеспечена оптическими каналами связи с использованием лазеров или LED источников света. На оптические волны все еще влияет затухание, но обычно они могут работать на более длинных диапазонах по сравнению с RF.
Могут быть использованы диодные лазерные лучи и недорогие источники света, такие как LED. В качестве источника света для подводной системы связи используются LED с длиной оптической волны от 400 нм до 550 нм [3].
В настоящее время основным методом беспроводной передачи данных между UWA-SNode, UUV и UWA-GW является подводная акустическая связь. Звук в воде распространяется на значительно большие расстояния по сравнению с RF сигналами. UWASN состоит из UWA-SNode и UUV различных типов, расположенных таким образом, чтобы выполнять совместный подводный мониторинг. UWA-SNode и UUV автономно организованы в сеть, которая должна адаптироваться к изменяющимся условиям океана с течением времени [4].
UWA-SNode применимы для мониторинга загрязнения, сбора океанографической информации, стратегического наблюдения, вспомогательной навигации, морской экспертизы и предотвращения стихийных бедствий. Несколько UUV, оборудованные датчиками, исследуют подводные ресурсы и собирают точную информацию о местоположении. Для реализации таких возможностей требуется надежная подводная связь между UWA-SNode и UUV.
UWA-SNode и UUV должны иметь возможности самоконфигурирования, которые позволяют им объединяться в сеть. Они должны управлять действиями путем обмена информацией о местоположении, конфигурациями и перемещениями, для того чтобы отправлять отслеживаемые данные на берег.
5.2 Области применения UWASN
С использованием UWASN могут быть реализованы неизученные применения в подводной среде, увеличивая функциональные возможности по обнаружению и прогнозу временных изменений в океанических средах. В таблице 1 показаны сегменты рынка UWASN и текущие и будущие потенциальные применения UWASN.
В приложении А приведено описание некоторых применений UWASN.
Таблица 1 - Сегменты рынка UWASN и список их текущих и будущих применений
Сегмент рынка | Описание |
Научные применения | Система раннего оповещения для обнаружения стихийных бедствий и цунами и предоставления предупреждений. Изучение последствий океанических землетрясений (моретрясений). Регистрация климатических данных. Контроль загрязнения. Разведка месторождений нефти и газа. Обнаружение изменения климата. Улучшение прогноза погоды. Изучение морской биологии. Исследования циркуляции океана |
Бизнес-применения | Открытие природных ресурсов. Контроль температуры во время работы. Химические и биологические изменения. Обнаружение утечек в трубопроводе. Сейсмический мониторинг, обеспечивающий способы управления водохранилищем |
Гражданские применения | Вспомогательная навигация. Выявление помех на морском дне. Обнаружение затонувших кораблей. Определение позиции швартовки. Предотвращение подводных помех. Определение маршрутов трубопроводов на морском дне. Выявление подводных месторождений. Определение путей для прокладки подводных кабелей |
Водные применения | Аквакультура и сельское хозяйство. Удаленный контроль-мониторинг дорогостоящих устройств |
Военные применения | Стратегическое наблюдение. Мониторинг портовых сооружений. Охрана иностранных портов. Противоминные меры. Подводный мониторинг. Обнаружение вторжения. Отображение и картирование дна океана |
6 Характеристики UWASN с точки зрения влияния вариабельности распространения
6.1 Подводная акустическая связь
Подводная акустическая связь используется для подводной передачи данных. Акустическая связь устанавливается с помощью преобразователей. Подводная связь затруднена из-за временных изменений канала, ограниченной полосы пропускания, многолучевого распространения и сильного затухания сигнала. При этом ввиду высокой проводимости морской воды акустическая связь работает более эффективно, чем радиочастотная связь.
При проектировании системы UWASN должны быть учтены следующие сложности:
- затухание в воде, ограничивающее расстояние распространения звука;
- низкие и зависимые от пути прохождения скорости распространения звука в интервале (1500±120) м/с;
- эхо и помехи, вызванные многолучевым(и) распространением(-ями) из-за отражений от морского дна и морской поверхности и из-за слоев водоема с различной плотностью;
- акустический сигнал, искаженный различными характеристиками подводного канала и эффектом Доплера не только при движении передатчика и приемника, но и ввиду временной вариабельности поверхности и толщи воды [5];
- уровень шума под водой может повредить или заблокировать части сигнала.
Звук возникает, когда объект вибрирует и передает движение в окружающую физическую среду. Это приводит к распространению колебаний, когда частицы в среде колеблются в направлении, одинаковом с распространением.
6.2 Ослабление акустического сигнала
Интенсивность звука уменьшается по мере увеличения расстояния при прохождении через среду распространения. В идеальной среде амплитуда звукового сигнала ослабляется из-за распространения волны. Затухание является другой причиной ослабления звука и происходит из-за:
- поглощения. Преобразование звуковой энергии в другую форму называется поглощением. При поглощении акустические волны преобразуются в тепло [6];
- профилей скорости звука. Скорость звука в воде зависит от таких параметров как температура, соленость и давление [7]. Скорость звука в воде увеличивается с повышением температуры воды, солености и давления.
6.3 Высокая задержка распространения
Скорость распространения звука в подводном мире отличается от скорости распространения электромагнитной волны. Подводная скорость звука зависит от свойств подводной среды, таких как давление, соленость и температура, которые напрямую зависят от глубины. Соленость морского мелководья, в которое впадают реки, и морской воды со льдом в Антарктике или Арктике может отличаться. У поверхности моря скорость звука под водой в четыре раза выше, чем скорость звука в воздухе.
Изменение кривизны звукового сигнала обусловлено характеристиками неоднородности под водой. Изменение кривизны обычно происходит в вертикальном направлении из-за трех факторов:
а) изменение температуры воды из-за неравномерного нагрева солнечными лучами;
б) изменение концентрации соли;
в) изменение гидростатического давления из-за глубины.
На направление кривизны звука влияет распределение скорости звука в среде. Летом уменьшается изгиб звуковых сигналов, потому что верхние слои воды теплее, чем нижние. Зимой изгиб звуковых сигналов увеличивается, потому что температура нижних слоев воды сохраняется в верхних слоях. Поэтому зимой диапазон распространения звука увеличен по сравнению с летом.
6.4 Многолучевое распространение
В подводной окружающей среде сигнал распространяется от передатчика к приемнику через прямое или многолучевое распространение. Механизмы формирования многолучевого распространения в океане зависят от геометрии канала, частоты сигнала, профиля скорости звука, дальности передачи и водной глубины.
Из-за отражения или преломления акустических волн вероятнее всего будет происходить подводное многолучевое распространение акустических волн. Когда акустические волны отражаются от поверхности воды/дна моря или от турбулентности воды и достигают приемника, то возникают отраженные лучи, что приводит к многолучевому распространению акустических волн. Такой вид отражения распространен на мелководье. В глубоководной среде обычно происходят преломления акустической волны, связанные с изменением скорости звука на глубине.
Поскольку под водой происходят горизонтальные коммуникации, следует учитывать многолучевое распространение. Отражения от поверхности воды, дна моря и турбулентности воды могут создавать многолучевое распространение. Для уменьшения эффектов многолучевого распространения могут быть использованы направленные дистанционные преобразователи. Однако при наличии препятствий поблизости модем будет сталкиваться с динамическим многолучевым распространением, которое быстро колеблется из-за отражений, и производительность модема резко снизится. Ввиду многолучевого распространения должен быть обеспечен компромисс между стоимостью модема и его надежностью [8].
6.5 Потери распространения
Потери распространения являются совокупным влиянием затухания, потерь на поглощение и геометрического расхождения. В воде звук распространяется более чем в четыре раза быстрее, чем в воздухе. Звук передается в воде в виде звуковой волны, аналогично открытому воздуху. Звуковое давление измеряется в децибелах (дБ) на один микропаскаль (мкПа). Источники шума в каналах UWASN разделяются на окружающий шум и техногенный шум.
- Затухание. Затухание создается за счет поглощения при преобразовании акустической энергии в тепло. Затухание растет с увеличением частоты и расстояния. На неровном дне и поверхности океана затухание обусловлено рассеянием. Также затухание вызывается отражением и зависит от глубины воды.
- Геометрическое расхождение. Геометрическое расхождение является расхождением звуковой энергии волн, не зависит от частоты и повышается с увеличением расстояния. Распространенными геометрическими приближениями расхождения являются цилиндрическое расхождение и сферическое расхождение.
6.6 Шум
В каналах UWASN есть два типа источников шума:
- Окружающий шум, связанный с сейсмической и биологической активностью воды, а также с движением воды из-за дождя, ветра, штормов и т.д. Окружающий шум влияет на отношение принимаемого сигнала к шуму (SNR) и на требуемую мощность передатчика. Окружающий шум в наблюдаемом водоеме должен быть учтен при выборе приемников и при определении мощности передатчика в UWASN [9].
- Техногенный шум, возникающий в результате судоходства и различных подводных устройств, таких как насосы. Морские производственные объекты имеют большой уровень шума.
7 Различия между UWASN и наземной сенсорной сетью
7.1 Типы подводных коммуникационных технологий
Конструкция подводной системы связи должна учитывать многолучевое распространение и ограниченную полосу пропускания подводной среды. Современные системы подводной связи используют оптическую, радио или акустическую передачу. В зависимости от применения и требований к конструкции указанные методы имеют свои преимущества и ограничения.
Акустические волны. В подводной среде акустические волны используются для передачи данных ввиду более низкого затухания акустических волн в воде по сравнению с воздухом. Использование подводной акустической волны зависит от многолучевого распространения, температуры воды и шума окружающей среды. Тем не менее, в настоящее время использование акустики для подводной связи является эффективным методом [10].
Радиоволны, представляющие собой электромагнитные волны. Подводная скорость электромагнитных волн примерно в 200000 раз выше, чем у акустических волн; в результате задержка сети является чрезвычайно малой. По сравнению с акустическими волнами электромагнитные волны не чувствительны для многолучевого распространения на мелководье [11]. Для подводной связи радиоволны работают только на короткие расстояния и не могут работать эффективно на большие расстояния.
Оптические волны. Оптические волны в свободном пространстве (FSO) на длинах волн в сине-зеленом спектре обеспечивают широкополосную связь от 10 до 150 Мбит/с на расстоянии от 10 до 100 м или более.
Важные особенности акустических волн, радиоволн и оптических волн для UWASN в морской окружающей среде приведены в таблице 2 [6].
Таблица 2 - Краткое описание особенностей акустических, радио и оптических волн в морской среде
Особенность | Акустические волны | Радиоволны | Оптические волны |
Поглощение | Низкое | Среднее | Высокое |
Эффективное расстояние | Несколько км | Несколько м | Несколько м |
Задержка распространения | Высокая | Низкая | Низкая |
Ограничения | Ограниченная ширина полосы частот. Помехи. Ограничения по окружающей среде | Ограничения по мощности. Ограничения по окружающей среде | Ограничения по окружающей среде |
В таблице 3 показаны преимущества и ограничения технологий подводной связи, использующих типы волн, указанные в таблице 2.
Таблица 3 - Различия между подводными технологиями связи [10], [12]
Технология | Преимущества | Ограничения |
Радиочастотная | Высокая пропускная способность на небольшом расстоянии. Проходит сквозь морское дно, воздух и водные границы. Не зависит от мутности и градиентов давления. Работает в зоне прямой видимости, не подвержена воздействию отложений и аэрации | Ограниченный диапазон в воде. Ограниченные характеристики распространения волн, которые возникают из-за высокого затухания из-за проводимости воды |
Акустическая | Диапазон до нескольких километров. Проверенная технология | При передаче по воздуху или под водой сильные отражения и затухание. Ограниченная пропускная способность. Неблагоприятно зависит от градиентов солености, давления и окружающего шума. Плохая производительность на мелководье |
Оптическая | Очень высокая пропускная способность | Легко передается по воздуху или под водой. Чувствительность к частицам, мутности и морскому загрязнению. Требуется прямая видимость. Малый диапазон |
Низкая пропускная способность является важным фактором для UWASN. Многолучевое распространение, шум, потери при передаче, доплеровский разброс и высокая задержка распространения заметно влияют на подводную связь. Обозначенные проблемы влияют на вариабельность подводной среды, что делает среднюю полосу пропускания как ограниченной, так и зависимой от частоты и диапазона. Для систем, работающих на расстоянии около 10 м, может потребоваться полоса пропускания 100 кГц, а для систем, работающих на расстоянии более чем 10 км, может потребоваться полоса пропускания в несколько кГц.
Диапазон является параметром классификации подводных акустических каналов связи.
Скорость передачи данных: в UWASN используются акустические волны, подобно использованию электромагнитных волн в наземных сетях. По этой причине скорости передачи данных в UWASN имеют более низкие значения по сравнению с наземными сетями.
7.2 Корпус
Водонепроницаемый корпус необходим для UWA-SNode для предотвращения коррозии и поломок (см. 9.4).
7.3 Затраты, связанные с сенсорными узлами
Стоимость развертывания UWA-SNode очень высока по сравнению с наземным сенсорным узлом, кроме того, для повторного использования требуется замена аккумулятора. Большинство UWA-SN-узлов, за исключением одноразовых узлов, требуют технологии замены узлов, известной как восстановление узла [13].
7.4 Всенаправленные и направленные преобразователи для передачи и приема данных
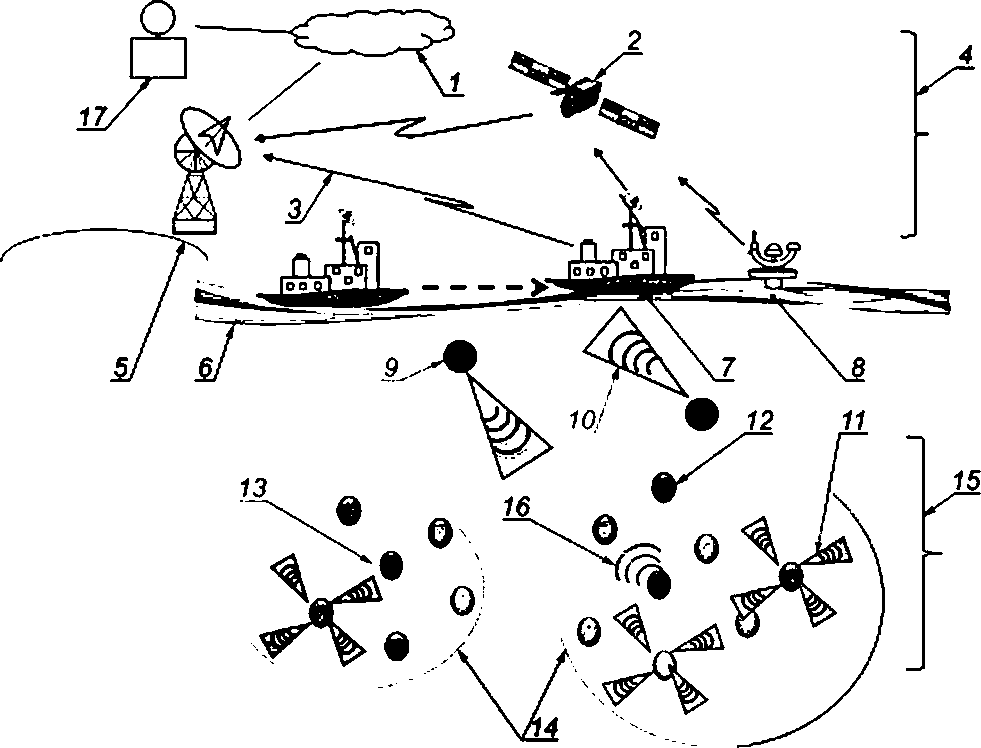
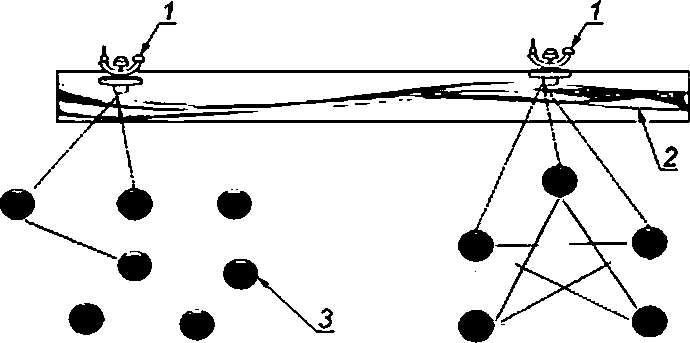
В UWASN для передачи данных между передатчиком и приемником необходимы всенаправленные и направленные датчики. Подводная кластерная сеть представляет собой небольшую сеть и использует всенаправленный преобразователь, как показано на рисунке 2.
Направленный преобразователь имеет ограничения с точки зрения мобильности. Этот преобразователь излучает одинаково и получает одинаково во всех направлениях кластера. Подводные ретрансляционные узлы, использующие направленный преобразователь, с помощью которого данные принимаются от UWA-CH, передают данные в UWA-GW. Это обеспечивается благодаря большому объему канала связи между ретрансляционным узлом и UWA-GW. Если используется всенаправленный преобразователь, потребуется больше энергии, и вероятность перекрытия будет высокой. Поэтому вместо всенаправленного преобразователя может быть использован направленный преобразователь.
 |
1 - Интернет; 2 - спутник; 3 - линия RF передачи; 4 - RF; 5 - базовая станция; 6 - поверхность; 7 - UWA-GW; 8 - UWA-DTN-GW; 9 - ретрансляционный узел; 10 - направленная антенна; 11 - всенаправленная антенна; 12 - UWA-SNode; 13 - UWA-CH; 14 - кластер; 15 - подводная среда; 16 - акустический канал; 17 - пользователь
Рисунок 2 - Всенаправленные и направленные преобразователи для передачи и приема данных
7.5 Подводная локализация объектов и событий и трехмерный ретрансляционный узел
В UWASN локализация играет важную роль в некоторых областях применения и является важной технологией. Локализация требуется для маркировки данных, сообщения о происшествии или наблюдениях и принятия решений о маршрутизации. Например, UWA-SNode изучают положение и движение мобильных маяков; следовательно, протоколы маршрутизации при пересылке данных проводят выбор оптимального ретранслятора, скорости и местоположения мобильных маяков. Эффект многолучевого распространения приводит к вариациям в подводном акустическом канале. По этой причине методы локализации для наземных сенсорных сетей не подходят для подводных сенсорных сетей. Точность оценки локализации снижают также разреженное развертывание подводных узлов, подвижность узлов и ограничения полосы пропускания. Сигналы GPS не проникают в толщу воды ввиду использования радиочастот.
Решение задачи локализации в UWASN имеет следующие сложности:
- мобильность из-за водных течений;
- ограниченность срока службы аккумулятора;
- плохое распространение высокочастотного сигнала GPS под водой.
Методы наземной локализации, которые зависят от уровня принимаемого сигнала (RSS), не используются в UWASN, поскольку основное различие вызвано неравномерным распространением акустического сигнала при RSS. Многие методы локализации для наземных сенсорных сетей не могут быть непосредственно применены к подводным средам из-за особенностей UWASN [14], [15].
7.6 Технология сбора энергии для UWASN
Замена аккумуляторов развернутых узлов UWASN является относительно сложной процедурой, поэтому важным аспектом UWASN является сбор энергии. Основной целью проектирования системы сбора энергии является обеспечение постоянного и регулярного энергоснабжения узлов UWASN. Подводные сенсорные узлы не имеют прямого доступа к солнечной энергии, потому что солнечный свет не эффективно проникает в морскую воду.
8 Характеристики и требования к UWASN
8.1 Структуры сети UWASN трех масштабов
Структура сети UWASN может быть представлена в трех масштабах, связанных с топологиями сети.
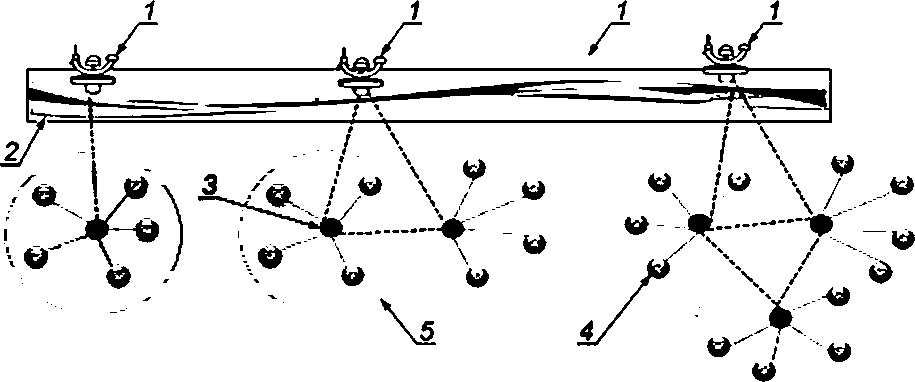
а) подводная акустическая основная сеть (UWA-FN). UWA-FN представляет собой тип небольшой кластерной сети или небольшой динамической ad-hoc сети. Данные сети используют один и тот же стек протоколов, как показано на рисунке 3 для кластерной сети и на рисунке 4 для динамической ad-hoc сети. Каждый кластер содержит UWA-CH и UWA-SNode. UWA-CH собирает данные из своих кластерных UWA-SNode и передает данные в UWA-GW через канал акустической связи. В динамической ad-hoc сети UWA-SNode являются либо фиксированными, либо мобильными, и они должны связываться с UWA-GW напрямую или через ретрансляционные узлы.
 |
1 - UWA-DTN-GW; 2 - поверхность; 3 - UWA-CH; 4 - UWA-SNode; 5 - кластер
Рисунок 3 - Подводная кластерная сеть
 |
1 - UWA-DTN-GW; 2 - поверхность; 3 - UWA-SNode
Рисунок 4 - Подводная динамическая ad-hoc сеть
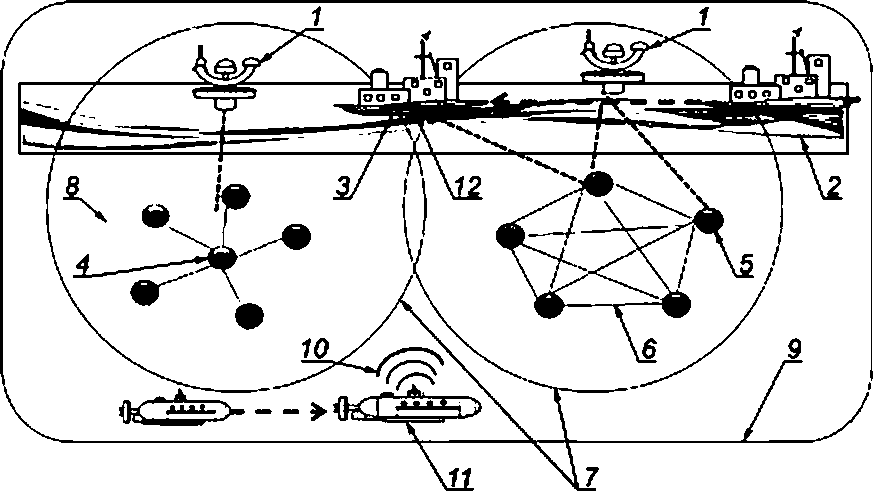
б) подводная акустическая объединенная сеть (UWA-UN). UWA-UN состоит из UWA-SNode, UWA-CH, ретрансляционных узлов и движущихся или фиксированных UWA-GW, как показано на рисунке 5. При глубоководной связи UWA-GW и UWA-CH, вероятно, разделены относительно большими расстояниями. В этом случае подводные ретрансляционные узлы используются для экономии энергии и уменьшения вероятности столкновения. Примерами ретрансляционных узлов являются UUV. Примерами UWA-GW являются буи и суда.
 |
1 - UWA-DTN-GW; 2 - поверхность; 3 - UWA-GW; 4 - UWA-CH; 5 - UWA-SNode; 6 - ad-hoc сеть; 7 - UWA-FN; 8 - кластер; 9 - UWA-UN; 10 - акустический канал; 11 - UUV; 12 - движущийся шлюз
Рисунок 5 - Сеть связи UWA-UN
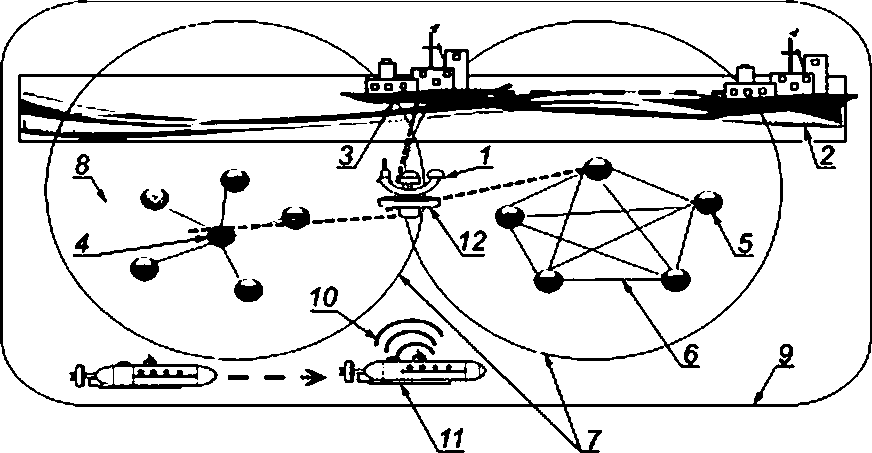
На рисунке 6 показана сеть связи UWA-UN, использующая фиксированный шлюз для связи между двумя различными типами сетей: кластерными и динамическими ad-hoc сетями.
 |
1 - UWA-DTN-GW; 2 - поверхность; 3 - UWA-GW; 4 - UWA-CH; 5 - UWA-SNode; 6 - ad-hoc сеть; 7 - UWA-FN; 8 - кластер; 9 - UWA-UN; 10 - акустический канал; 11 - UUV; 12 - движущийся шлюз
Рисунок 6 - Сеть связи UWA-UN с использованием фиксированного шлюза
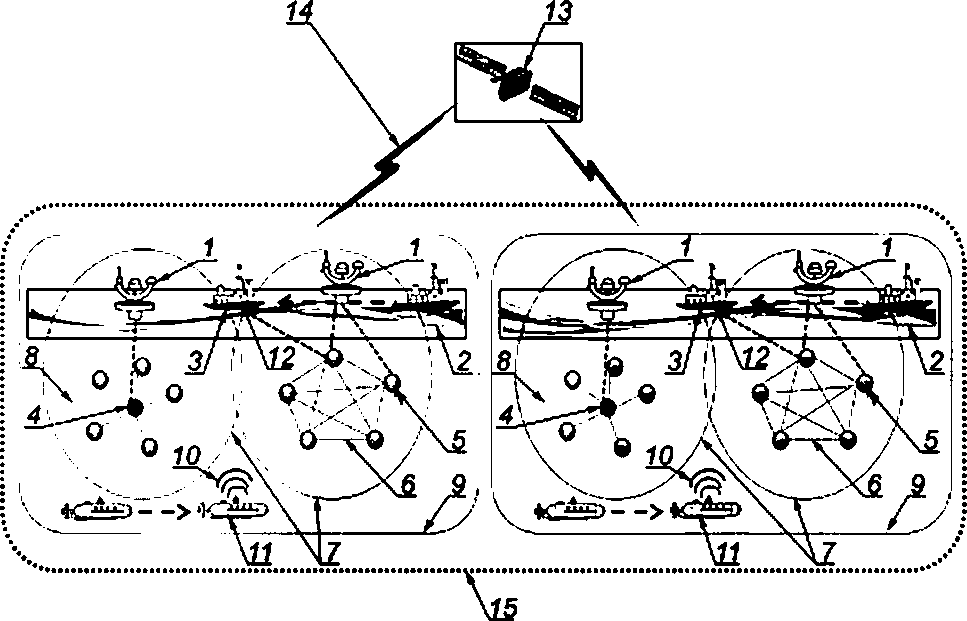
 |
1 - UWA-DTN-GW; 2 - поверхность; 3 - UWA-GW; 4 - UWA-CH; 5 - UWA-SNode; 6 - ad-hoc сеть; 7 - UWA-FN; 8 - кластер; 9 - UWA-UN; 10 - акустический канал; 11 - UUV; 12 - движущийся шлюз; 13 - спутник; 14 - канал RF связи; 15 - UWA-EUN
Рисунок 7 - Сеть связи UWA-EUN
8.2 Развертывание двухмерной и трехмерной топологии
8.2.1 Общие положения
Для развертывания UWA-SNode используются двухмерная и трехмерная архитектуры связи.
8.2.2 Двухмерная архитектура UWASN
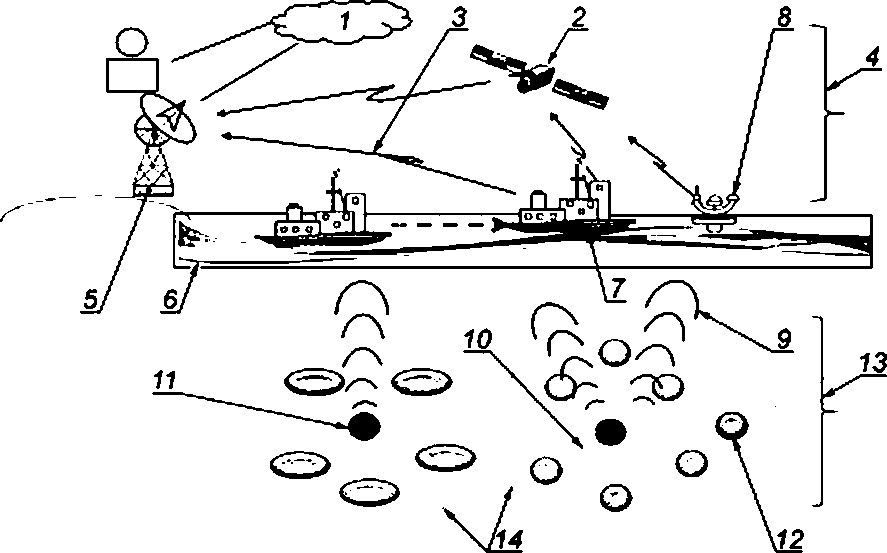
Типовая двухмерная архитектура UWASN показана на рисунке 8. Группы UWA-SNode привязаны к морскому дну глубокими океанскими якорями. Передача данных между UWA-SNode и UWA-CH проводится с помощью акустических каналов. UWA-CH используют для передачи данных вертикальные и горизонтальные связи.
UWA-CH использует горизонтальные связи для коммуникации с UWA-SNode для:
- отправки конфигурационных данных на UWA-SNode и передачи команд;
- сбора данных мониторинга с UWA-SNode.
UWA-CH использует вертикальные связи для отправки данных в UWA-GW. Поскольку глубина моря может достигать 10 км, в вертикальных каналах следует использовать приемопередатчики большой дальности для глубоководного применения. UWA-GW оснащаются акустическим приемопередатчиком для обработки нескольких параллельных соединений. Узлы UWA-SNode могут быть подключены к каналам UWA-CH через многоскачковые пути или прямые линии связи.
Использование двухмерной архитектуры UWASN [16] включает следующие аспекты:
- требования к применению определяют минимальное количество UWA-SNode и UWA-GW, которые должны быть установлены для обеспечения покрытия связи и самонаведения;
- целевая нижняя зона покрытия дает критерии для выбора оптимального региона развертывания и оценку количества избыточных UWA-SNode, которые должны быть установлены для компенсации сбоев узлов.
 |
1 - Интернет; 2 - спутник; 3 - канал RF связи; 4 - RF; 5 - базовая станция; 6 - поверхность; 7 - UWA-GW; 8 - UWA-DTN-GW; 9 - вертикальный канал связи; 10 - горизонтальный многоскачковый канал связи; 11 - UWA-CH; 12 - UWA-SNode; 13 - подводная среда; 14 - кластер
Рисунок 8 - Двухмерная архитектура UWASN
8.2.3 Трехмерная архитектура UWASN
Трехмерная типовая архитектура подводной акустической сенсорной сети приведена на рисунке 9. Для наблюдения требуемой области в трехмерной UWASN UWA-SNode плавают на разных глубинах. Это может быть достигнуто путем присоединения каждого UWA-SNode к поверхностному бую с помощью проводов. Такая установка имеет два недостатка: (1) суда могут быть заблокированы буями; (2) UWA-SNode могут быть обнаружены и деактивированы противником. Плавающие буи могут подвергаться воздействию климата, воровства и взлома. Ввиду обозначенных причин рекомендуется учитывать другой подход [17] при привязке UWA-SNode.
Использование трехмерной архитектуры UWASN включает следующие аспекты:
- зона охвата измерений: UWA-SNode должны совместно регулировать свою глубину на основе диапазона измерений. Такая регуляция позволяет достичь трехмерного охвата толщи океана. Должна быть обеспечена возможность провести измерения предполагаемого явления на всех глубинах;
- зона охвата связи: UWA-SNode передает данные на наземную станцию через многоскачковые каналы. Сетевые устройства управляют глубиной своего расположения, чтобы топология сети оставалась подключенной. Это означает, что между UWA-SNode и UWA-GW должен существовать один путь.
 |
1 - Интернет; 2 - спутник; 3 - линия RF передачи; 4 - RF; 5 - базовая станция; 6 - поверхность; 7 - UWA-GW; 8 - UWA-DTN-GW; 9 - буй; 10 - акустический канал; 11 - UWA-SNode; 12 - UWA-CH; 13 - подводная среда; 14 - кластер; 15 - ретрансляционный узел; 16 - ad-hoc сеть
Рисунок 9 - Трехмерная архитектура UWASN
В двухмерной и трехмерной архитектурах подводных акустических сенсорных сетей UWA-SN обычно питаются от аккумуляторов. Однако существуют следующие недостатки использования аккумуляторов в UWA-SN:
- замена разряженных аккумуляторов требует больших затрат времени и средств, особенно при увеличении числа UWA-SN;
- аккумулятор UWA-SN имеет ограниченную энергию;
- проблема утилизации аккумуляторов ввиду химического состава аккумулятора, включающего токсичные тяжелые металлы.
После развертывания UWA-SNode топология сети должна находиться в статическом состоянии, и сеть может существовать в виде двухмерной или трехмерной архитектуры на поверхности или на морском дне. Двухмерная топология сети может быть кластерной, линейной ретрансляцией, сеточной или развертыванием дерева. В трехмерной топологии UWA-SNode могут быть пришвартованы для плавания на фиксированной глубине или прикреплены якорями на дне океана. В трехмерной архитектуре подводной акустической сенсорной сети якоря морского дна используются для разреженного развертывания подводных сенсорных узлов. При увеличении глубины давление воды оказывает влияние на скорость звука.
В таблице 4 приведено сравнение между двумя архитектурами.
Таблица 4 - Сравнение двухмерной и трехмерной UWASN
Параметр | 2D-UWASN | 3D-UWASN |
Требование зоны охвата | Двухмерная зона охвата | Трехмерная зона охвата |
Мониторинг | Дно океана | Толща океана |
Архитектура | На основе кластера | На основе ad-hoc |
Конструкция | Простая | Сложная |
Мощность | Низкая | Высокая |
Мобильность узла | Фиксированный/мобильный | Фиксированный/мобильный |
Методы локализации | Не требуются | Требуются |
Путь связи | Прямой/односкачковый путь | Многоскачковый путь |
Покрытие связи | Ограниченная область | Вся область |
8.3 Кросс-уровень
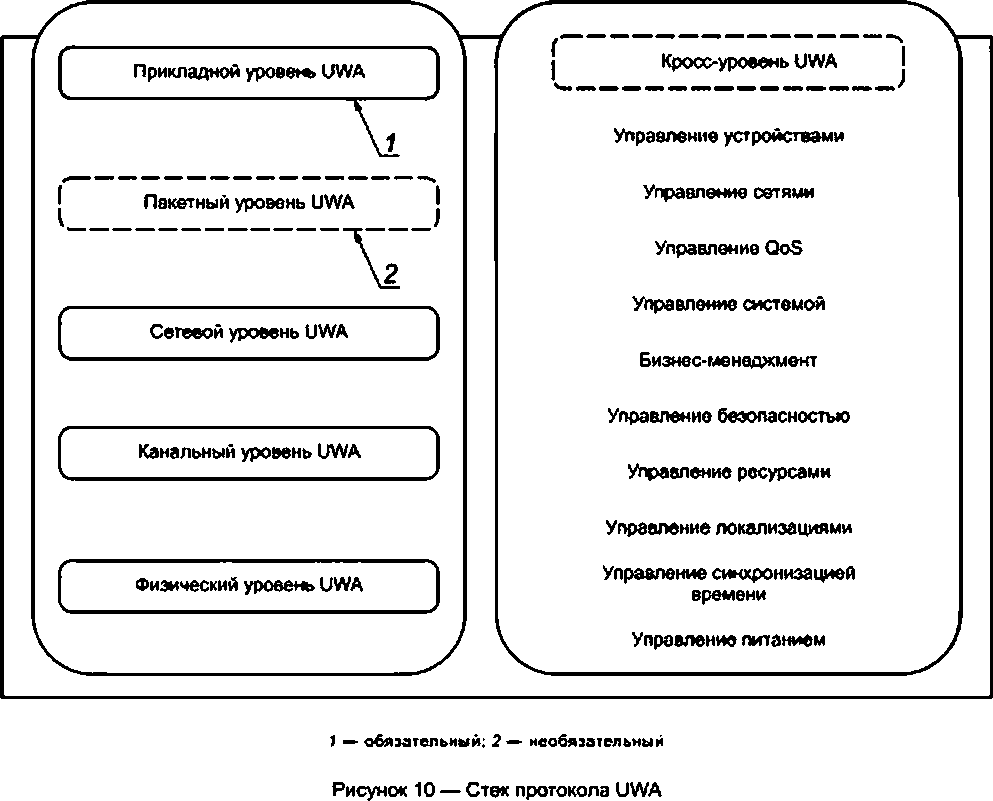
Стек протоколов для UWASN должен поддерживать взаимодействие между UWA-SNode. Стек протоколов также включает управление питанием. Протокол должен обеспечивать функциональность физического, канального, сетевого, пакетного и прикладного уровней.
Стек протоколов должен включать управление устройствами, управление сетью, управление QoS, управление системой, бизнес-менеджмент, управление безопасностью, управление ресурсами, управление локализацией, управление синхронизацией времени и управление питанием (см. рисунок 10).
Для некоторых областей применения задачей управления питанием должна быть минимизация энергопотребления в узлах с помощью спящих режимов, управления питанием и т.д.
Для некоторых областей применения является обязательной точность синхронизации времени в подводных датчиках для управления, связанного с агрегацией данных, режимами ожидания, оптимизацией трехмерной топологии и т.д.; таким образом, синхронизация времени должна поддерживаться для всех задействованных узлов в сетях.
Управление локализацией важно, потому что информация об относительной или абсолютной локализации предоставляется UWA-SNode, как только она требуется для стека протоколов.
 |
1 - обязательный; 2 - необязательный
Рисунок 10 - Стек протокола UWA
8.4 Подводный акустический модем
Подводные акустические модемы используются для передачи и получения подводных данных. Назначением акустического модема является преобразование цифровых данных в акустические сигналы. Акустический модем приемника преобразует акустический сигнал в цифровые данные. По сравнению с телефонными или кабельными модемами на суше скорость передачи данных модемов значительно ниже.
8.5 Расширение Доплера
С расширением Доплера связаны два вида эффекта:
- простое преобразование частоты, которое может относительно легко компенсироваться приемником;
- непрерывное расширение частот, которое приводит к доплеровскому расширению сигнала и не может быть легко компенсировано приемником [18].
Причины учета расширения Доплера в подводной среде:
- расширение частоты, которое приводит к расширению Доплера, может быть значительным в подводных каналах, вызывая ухудшение характеристик цифровой связи. В подводном канале связи высокая скорость передачи данных может быть причиной интерференции нескольких смежных символов вблизи приемника;
- расширение Доплера дает умеренный частотный сдвиг на приемнике, которой может быть устранен, однако остается нерешенным вопрос о рассеянии на постоянной частоте, которое происходит на несмещенном сигнале.
Следовательно, принимаемый сигнал должен быть максимально скомпенсирован или минимизирован с использованием алгоритма(-ов) на приемнике или при обработке в нисходящем направлении.
8.6 Развертывание с учетом глубины воды
Развертывание UWA-SNode может быть детерминированным, т.е. UWA-SNode позиционируются вручную, и данные передаются по заранее определенным путям. Одной из фундаментальных задач для UWASN является развертывание узла, в котором поддерживаются многочисленные необходимые сетевые службы, такие как обнаружение границ, маршрутизация и управление топологией сети. Ввиду отличительных особенностей подводных каналов и сложных сред развертывания в 3D пространстве, во время развертывания UWASN должны быть учтены различные аспекты. Качество и стоимость развертывания являются двумя противоречивыми аспектами [16].
Свойства среды, через которую проходит звуковая волна, оказывают существенное влияние на UWASN. В этом случае производительность сети существенно зависит от глубины воды, типа воды и климата. Во избежание нарушений производительности некоторые системы для подводной связи спроектированы и сконфигурированы на стабильную работу даже в суровых условиях. Даже при наличии обоснованного окружения распространения такие конфигурации сети приводят к неоптимальной производительности. Частью задачи оптимизации производительности является прогноз того, какие особенности окружающей среды оказывают наибольшее влияние. Перед развертыванием подводных узлов необходимо оценить давление воды.
8.7 Подводная проводная и беспроводная связь
Акустическая связь давно используется для беспроводной передачи данных под водой. Электрическая энергия от преобразователя усиливается и передается в воду в виде акустической энергии. Процесс показан на рисунке 11.
Каждый UWA-SNode находится в спящем состоянии в течение некоторого времени, прежде чем включиться для связи. Во время сна UWA-SNode выключает передатчик и устанавливает таймер пробуждения. В зависимости от сценария приложения могут быть установлены время сна и прослушивания. В некоторых аварийных приложениях каждый узел работает постоянно, чтобы обеспечить немедленную связь в аварийной ситуации.
 |
1 - спутник; 2 - линия RF передачи; 3 - базовая станция; 4 - поверхность; 5 - UWA-DTN-GW; 6 - ретрансляционный узел; 7 - беспроводной акустический канал; 8 - проводная связь; 9 - UUV; 10 - UWA-SNode; 11 - UWA-CH; 12 - кластер
Рисунок 11 - Подводная проводная и беспроводная связь
8.8 Синхронизация времени
Синхронизация времени часов является критически важной в UWASN для предоставления базовых функций, таких как управление питанием, передача данных и безопасность. Каждый UWA-SNode находится удаленно и поддерживает свои собственные часы (т.е. локальные часы) для отметки времени данных, измеряемых по времени. Данные, измеряемые по времени, генерируемые различными UWA-SNode, объединяются для получения значительного набора данных. В сети важно иметь одинаковой отсчет времени среди всех UWA-SNode.
Из-за возможных длительных задержек распространения в подводной акустической связи на производительность сети сильно влияют синхронизация времени и расписание передачи данных между UWA-SNode в подводной среде.
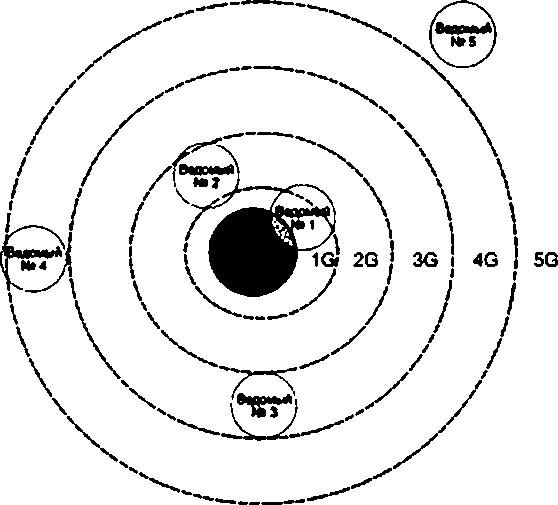
На рисунке 12 показан пример технологии для классификации UWA-SNode в соответствии с их расстоянием от главного узла (UWA-CH) и расчета расписания передачи данных. Количество групп удаленности (DG) и расстояний "ведущий-ведомый" основано на размере сети и числе узлов UWA-SNode, а в соответствии с расстоянием между "ведущим" (UWA-CH) и "ведомым" (UWA-SNode) формируется группа. На рисунке 12 создаются пять групп удаленности в зависимости от числа UWA-SNode и размера сети. "Ведущий" узел (UWA-CH) собирает информацию от "ведомых" (UWA-SNode) на основе расписания передачи данных, например, расписания пробуждения и сна.
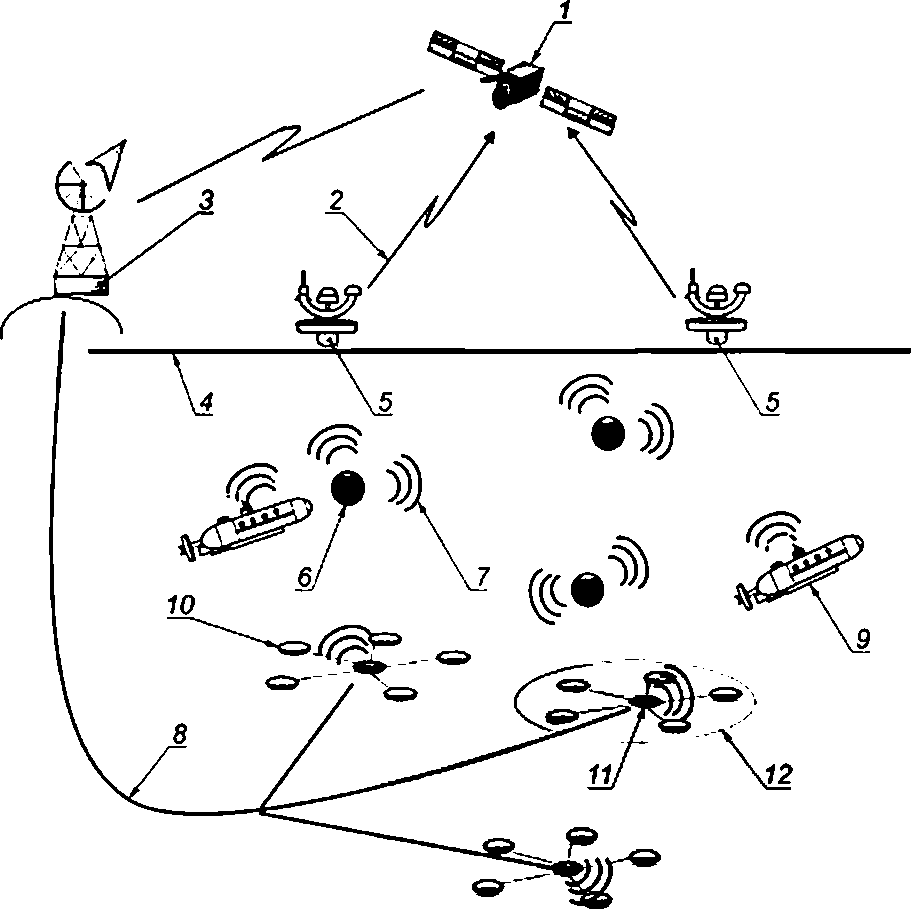 |
Рисунок 12 - Синхронизация времени для передачи данных
8.9 Период передачи данных для энергосбережения
В подводной связи энергосбережение является необязательным. UWA-SNode осуществляют передачу данных в течение назначенного им периода времени и в обратном случае поддерживаются в режиме ожидания для экономии энергии.
Активный и спящий режимы для энергосбережения: в кластерных сетях UWA-CH контролирует UWA-SNode. При этом кластеры не должны быть постоянно включены в подводной среде. Поддержание UWA-SNode в активном режиме приводит к потерям энергии, следовательно, UWA-SNode могут поддерживаться в спящем режиме, когда они не активны. При наступлении события UWA-CH отправляет сигнал пробуждения на UWA-SNode. После выполнения требуемой задачи UWA-SNode снова переходит в режим ожидания. Во время режима ожидания UWA-SNode выключается и устанавливает таймер для альтернативного пробуждения, или пробуждение произойдет при получении сигнала пробуждения от UWA-CH.
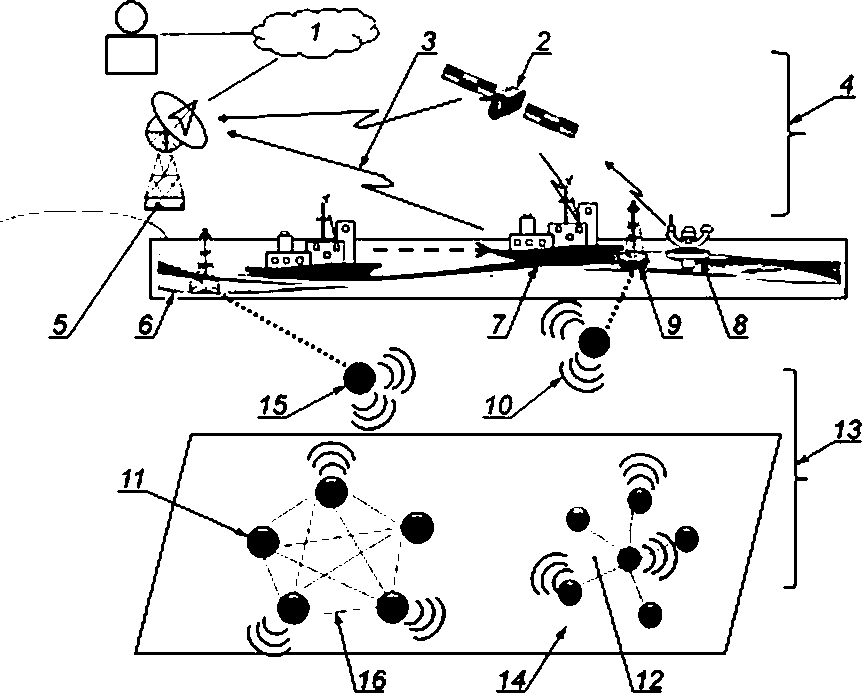
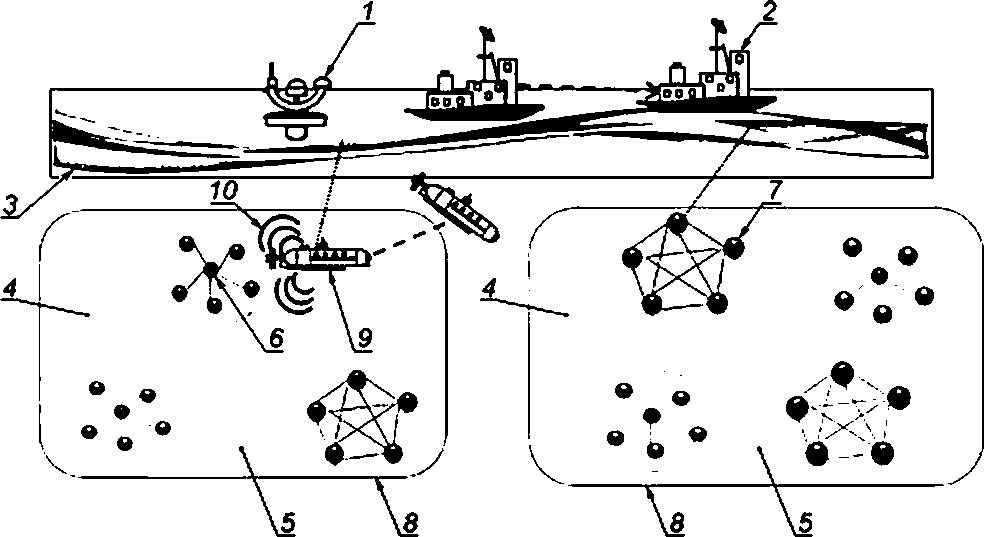
На рисунке 13 показана архитектура UWASN, разделенная на многочисленные сети. Сети являются кластерными и динамическими ad-hoc сетями. Когда подвижный шлюз входит в зону связи, с шлюзом в активном режиме связывается только ближайшая сеть; остальные сети поддерживаются в спящем режиме для энергосбережения.
 |
1 - UWA-DTN-GW; 2 - UWA-GW; 3 - поверхность; 4 - активный режим; 5 - спящий режим; 6 - UWA-CH; 7 - UWA-SNode; 8 - UWA-UN; 9 - UUV; 10 - акустическая связь
Рисунок 13 - Использование активного и спящего режимов для энергосбережения
В подводной связи каждый уровень передачи данных может экономить энергию, например:
- назначать период передачи данных для связи на прикладном уровне;
- назначать спящий и активный режимы между UWA-SNode и UWA-CH на сетевом уровне;
- назначать временные интервалы связи/периода времени между UWA-SNode на канальном уровне.
Помимо назначенного временного интервала/периода, сетевые устройства остаются в режиме ожидания для энергосбережения.
8.10 Маршрутизация
Маршрутизация в подводной среде отличается от наземной беспроводной/поверхностной маршрутизации. Существует достаточное количество сложностей в подводной среде. Из-за густой соленой воды в океане невозможна передача оптических и электромагнитных сигналов на большие расстояния из-за того, что сигнал рассеивается, сильно ослабляется и поглощается. Протоколы маршрутизации UWASN, которые требуют широкую полосу пропускания, приводят к большим сквозным задержкам.
 |
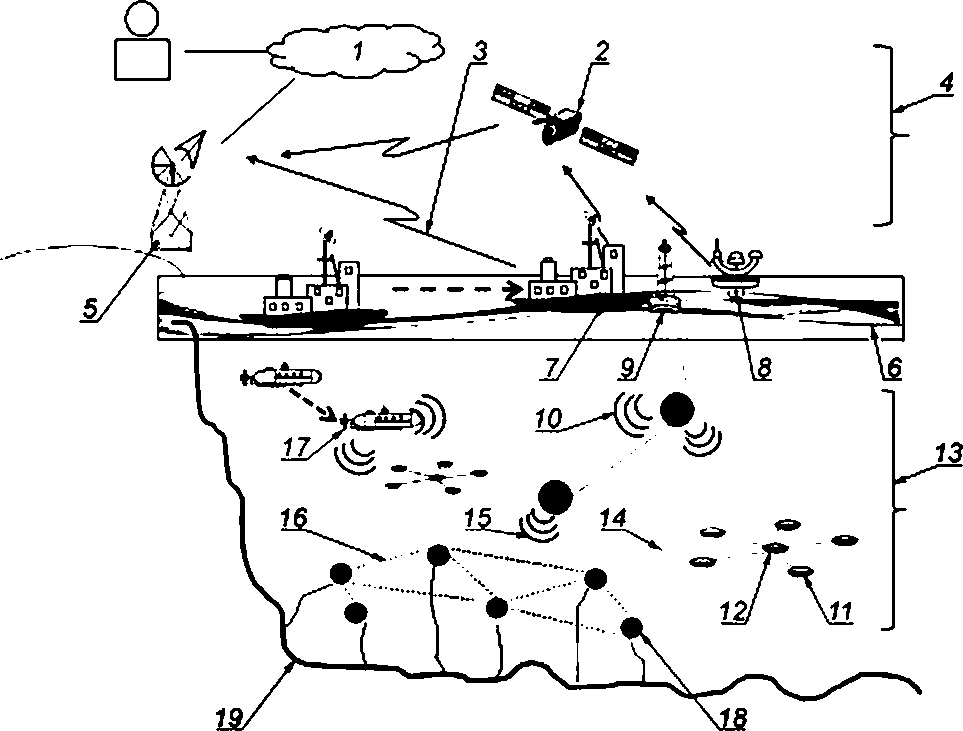
1 - Интернет; 2 - спутник; 3 - линия RF передачи; 4 - RF; 5 - базовая станция; 6 - поверхность; 7 - UWA-GW; 8 - UWA-DTN-GW; 9 - буй; 10 - акустический канал; 11 - UWA-SNode; 12 - UWA-CH; 13 - подводная среда; 14 - кластер; 15 - ретрансляционный узел; 16 - ad-hoc сеть; 17 - UUV; 18 - фиксированный UWA-SN; 19 - дно
Рисунок 14 - UWASN маршрутизация
Основные протоколы маршрутизации, доступные для UWASN, представлены далее в качестве примеров:
а) Протоколы маршрутизации на основе кластера:
- протокол кластеризации минимальной стоимости (МССР): МССР - это протокол на основе кластера, в котором формирование кластеров происходит в соответствии с затратами. Для вычисления стоимости кластера используются три параметра: (1) потребность в энергии для UWA-SNode для связи с UWA-CH; (2) относительные положения UWA-CH и UWA-GW; (3) остаточная энергия UWA-CH и UWA- SNode;
- схема распределенной подводной кластеризации (DUCS): действует как адаптивный самоорганизующийся протокол, и из сети формируются группы UWA-SNode с UWA-CH. Все UWA-SNode передают пакеты данных в UWA-CH. UWA-CH обрабатывают сигналы и передают их в UWA-GW;
- маршрутизация на основе формы гидравлического давления (Hydro cast): протокол использует информацию о глубине UWA-SNode для их кластеризации. Предполагается, что во время процесса формирования кластера в выбранных кластерах не содержится скрытых UWA-SNode.
б) протоколы динамической ad-hoc маршрутизации: для динамической ad-hoc маршрутизации в UWASN используются такие протоколы, как динамическая маршрутизация источника (DSR), протокол вектора расстояния по запросу (AODV), протокол вектора расстояния до места назначения (DSDV), мгновенный обмен сообщениями под водой MANET (GUWMANET), SEAWEB, оптимизированная маршрутизация каналов связи (OLSR) и другие протоколы.
8.11 Сетевое кодирование
Основным свойством подводного акустического канала является потеря пакетов. Акустические каналы могут быть основным препятствиям для эффективной передачи подводных данных. UWASN имеют долгую задержку распространения и низкое значение индикатора качества канала, что требует эффективных и интеллектуальных подходов к устранению ошибок. В качестве одного из лучших методов с высокими гарантиями устранения ошибок и повышения пропускной способности сети предложено сетевое кодирование.
В сетевом кодировании несколько входящих пакетов могут быть закодированы узлом в один (или более) исходящих. В дополнение к пересылке узлы могут обрабатывать входящие информационные потоки. При транспортировке потоки независимо генерируемых и потребляемых данных не обязательно должны храниться отдельно. Существуют методы для извлечения независимой информации после их объединения. Сетевое кодирование обеспечивает такие преимущества, как устойчивость к сбоям в линии связи, беспроводные ресурсы, сложность, безопасность и пропускную способность в различных областях сети связи.
8.12 Сжатие данных
Процесс уменьшения размера данных называется сжатием данных. Сжатие данных выгодно, поскольку оно позволяет устройствам хранить или передавать то же самое количество данных в меньшем числе битов, что является важным в передаче и хранении данных. Сжатие может выполняться без потерь или с потерями. В случае сжатия без потерь число битов уменьшается путем выявления и устранения статистической избыточности. При сжатии без потерь не происходит потери информации. При сжатии с потерями число битов уменьшается путем идентификации и удаления необязательной информации.
UWA-SNode ограничены в ресурсах, потому что ограничены источник питания, скорость обработки, пропускная способность и объем памяти. Сжатие данных позволяет максимально использовать указанные ресурсы. В подводных коммуникациях при обработке данных потребляется меньше энергии, чем при передаче данных. Для снижения потребления энергии в UWA-SN перед передачей должно применяться сжатие данных.
8.13 Сеть, устойчивая к задержкам и разрывам (DTN)
DTN выступает в качестве высоко неоднородной системы, в которой не существует сквозной связи из-за частых обрывов канала, пропускной способности канала и изменения задержек с течением времени.
Сеть DTN для UWASN функционирует в следующих условиях:
а) прерывистое соединение: сеть DTN следит за статусом соединения; поскольку оно является прерывистым или частичным, то достижение сквозного канала связи не гарантируется.
б) высокая задержка: время ожидания узла, время ожидания в очереди и время передачи очень велики из-за прерывистого соединения.
в) ограниченные ресурсы: вычислительные возможности, возможности обработки и хранения узла являются низкими ввиду стоимости, объема и энергии.
г) неоднородное соединение: DTN используется в неоднородной связи для передачи асинхронных сообщений. DTN содержит пакетный уровень, который обеспечивает связь между различными стеками сетевых протоколов. UWA-DTN-GW действует как согласованная среда связи для сообщений о взаимосвязи.
д) динамическая топология: топология DTN динамически изменяется из-за ограничений энергии, экологических изменений или других сбоев.
9 Дополнительные требования UWASN
9.1 Общие положения
Дополнительные требования UWASN делятся на три категории: кросс-уровень (см. 9.2), технологии передачи данных (см. 9.3) и другие системные требования (см. 9.4).
9.2 Кросс-уровень
Кросс-уровень в UWASN является необязательным. Кросс-уровень UWASN включает управление питанием, управление устройствами, управление безопасностью, управление ресурсами, управление локализацией, управление QoS, управление сетью, управление системой и управление синхронизацией времени. Управление питанием должно минимизировать потребление энергии; управление локализацией должно предоставлять данные локализации; управление синхронизацией времени должно отвечать за агрегацию данных и трехмерную топологию, управление устройствами, управление сетью и т.д.
9.3 Технологии передачи данных
Проводная и беспроводная связь: для беспроводной передачи звука под водой должна использоваться акустическая связь. Однако акустическая энергия недостаточно сильна, чтобы преодолевать под водой большие расстояния. С помощью преобразователей должна усиливаться и передаваться электрическая энергия. Кабельные архитектуры UWASN должны использовать проводную связь для фиксирования UWA-SNode с помощью проводной линии.
Синхронизация времени для передачи: синхронизация времени в UWASN является необязательной. Синхронизация времени обеспечивает успешную связь между подводными устройствами на UWASN. В UWASN UWA-SNode могут располагаться разреженно, поэтому точные местоположения могут быть не определены. Для оценки местоположения должна использоваться синхронизация времени. Синхронизация должна позволять узлам UWA-SNode находиться в режиме сна и периодически активироваться для приема сообщений маяка, что помогает экономить энергию.
Период передачи данных для экономии энергии: при подводной связи ввиду ограниченного заряда аккумулятора необходима экономия энергии. Сетевой уровень должен назначить спящий и активный режимы между UWA-SNode и UWA-CH. Канальный уровень должен назначать временные интервалы между подводными устройствами. Эти устройства должны обмениваться данными в течение назначенных временных интервалов, и в течение оставшегося времени они могут переходить в режим сна для экономии энергии.
Маршрутизация: главной проблемой подводной маршрутизации является высокая плотность соленой воды. Протоколы маршрутизации UWASN, которые требуют высокой пропускной способности, приводят к большим сквозным задержкам.
Сетевое кодирование: сетевое кодирование - это метод, при котором передаваемые данные существуют в виде соединенных и повторно соединенных пакетов внутри сети. Далее происходит передача пакетов. Данные могут быть соединены в месте их конечного назначения. Основной характеристикой подводной связи является длительная задержка распространения. Благодаря сетевому кодированию соединение и повторное соединение сообщений экономит энергию, увеличивает пропускную способность и минимизирует задержку.
Сжатие данных: сжатие данных должно использоваться для экономии энергии.
UWA-DTN: для уменьшения задержек должна использоваться сеть DTN. С помощью шлюза DTN может быть установлена связь между неоднородными сетями.
9.4 Другие системные требования
Восстановление узла: при подводной связи требуется замена аккумулятора для повторного использования узлов. Должна использоваться технология захвата узла, также называемая заменой узла, когда оператор (человек или UUV) должен периодически ремонтировать сенсорные узлы малой мощности и заменять их полностью заряженными сенсорными узлами.
Очиститель загрязнения: загрязнение является серьезной проблемой при подводном развертывании UWA-SNode в течение длительного периода времени. Должен быть использован очиститель загрязнения для очистки морской флоры и фауны, например, водорослей, сорняков, зебр и ракушек, прикрепленных к подводным устройствам. Очиститель загрязнения должен быть учтен перед созданием и развертыванием UWA-SNode в подводной среде [13].
Корпус: для развертывания узлов в подводных коммуникациях узлы должны быть водонепроницаемыми и устойчивыми к высоким давлениям воды. Уровень прочности гидроизоляции зависит от глубины воды. Должен быть использован корпус для установки и развертывания UWA-SNode в подводной среде.
Приложение А
(справочное)
Некоторые применения UWASN
А.1 Экологический мониторинг - Химические и биологические изменения
А.1.1 Описание
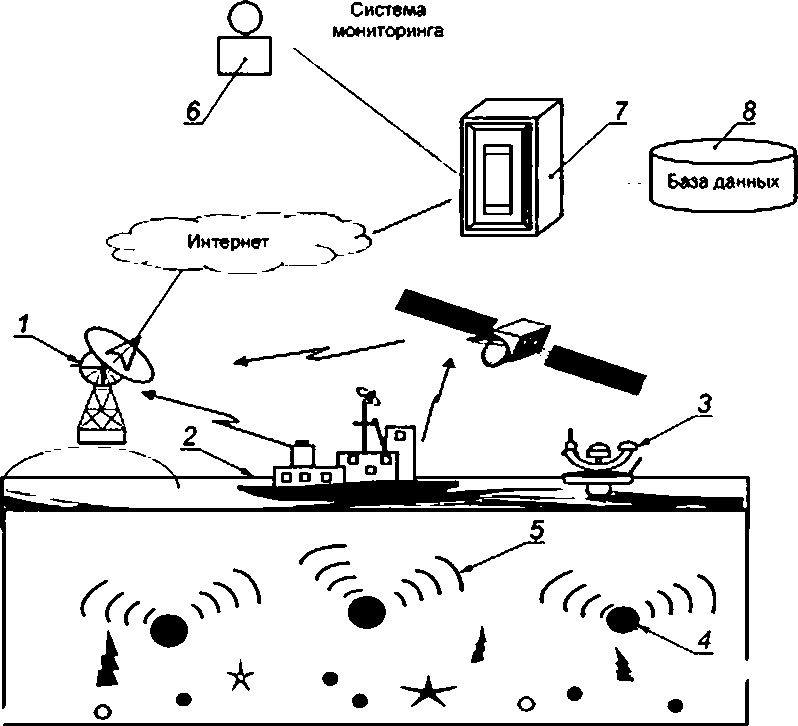
В подводной среде UWA-SNode используются для сбора данных о подводной окружающей среде, таких как океанические течения, соленость, температура, давление и растворенный кислород. Приложения экологического мониторинга включают, но не ограничиваются ими, мониторинг океанских течений и ветров, усовершенствованный прогноз погоды, обнаружение изменений климата, понимание и прогнозирование воздействия человеческой деятельности на морские экосистемы, биологический мониторинг, такой как отслеживание рыб или микроорганизмов.
См. рисунок А.1.
 |
1 - базовая станция; 2 - UWA-GW; 3 - буй; 4 - UWA-SNode; 5 - акустическая связь; 6 - пользователь; 7 - сервер мониторинга; 8 - база данных качества окружающей среды
Рисунок А.1 - Одно из приложений экологического мониторинга
А.1.2 Физические сущности
UWA-SNode: целью является передача данных датчиков.
Пользователь: целью является мониторинг системы.
А.1.3 Поток данных
UWA-SNode предоставляют данные датчиков серверу через UWA-GW.
Сервер хранит данные подводных измерений в базе данных.
Пользователи приложения наблюдают за окружающей средой с помощью данных подводных измерений.
А.1.4 Условия
Должен быть настроен масштаб сети UWASN при разворачивании узлов для обеспечения должного контроля заданной подводной среды.
В зависимости от типа подводной среды требуется развертывание двухмерной или трехмерной топологии.
Для мониторинга окружающей среды необходимо использовать кросс-уровень для поддержки взаимной работы между UWA-SNode.
Для передачи и получения данных о подводной среде необходимо использовать подводный акустический модем.
Для экономии энергии при мониторинге окружающей среды должна быть правильно определена частота передачи данных.
А.2 Обнаружение утечек из трубопроводов
А.2.1 Описание
На подводных нефтегазодобывающих месторождениях трубопроводы являются неотъемлемой частью транспортировки углеводородов для последующих процессов. В этих трубопроводах возникают проблемы из-за коррозии, разрушения конструкции и образования осадка из-за углеводородных химических процессов. Проблемы такого рода приводят к потере производства и прибыли, а также к высоким затратам на техническое обслуживание. Также современные экологические проблемы требуют предотвращения утечек углеводородов в океан для предотвращения экологических катастроф. Минимизация этих проблем путем прогнозирования и своевременных действий представляет жизненно важный интерес промышленности. Постоянный мониторинг трубопроводов предоставляет данные, необходимые для принятия правильных решений.
См. рисунок А.2.
При мониторинге конвейера UWA-SNode размещаются вдоль конвейера для сбора данных, что позволяет покрывать всю поверхность.
 |
1 - базовая станция; 2 - UWA-GW; 3 - UWA-SNode; 4 - UUV; 5 - акустическая связь; 6 - сломанный трубопровод; 7 - сервер управления утечками из газовых и нефтяных трубопроводов; 8 - база данных
Рисунок А.2 - Приложение мониторинга утечки из газовых и нефтяных трубопроводов
А.2.2 Физические сущности
UWA-SNode: целью является сообщение данных от датчиков.
UWA-GW: выступает в качестве посредника между UWA-SNode и UWA-GW.
Сервер: постоянный мониторинг трубопроводов.
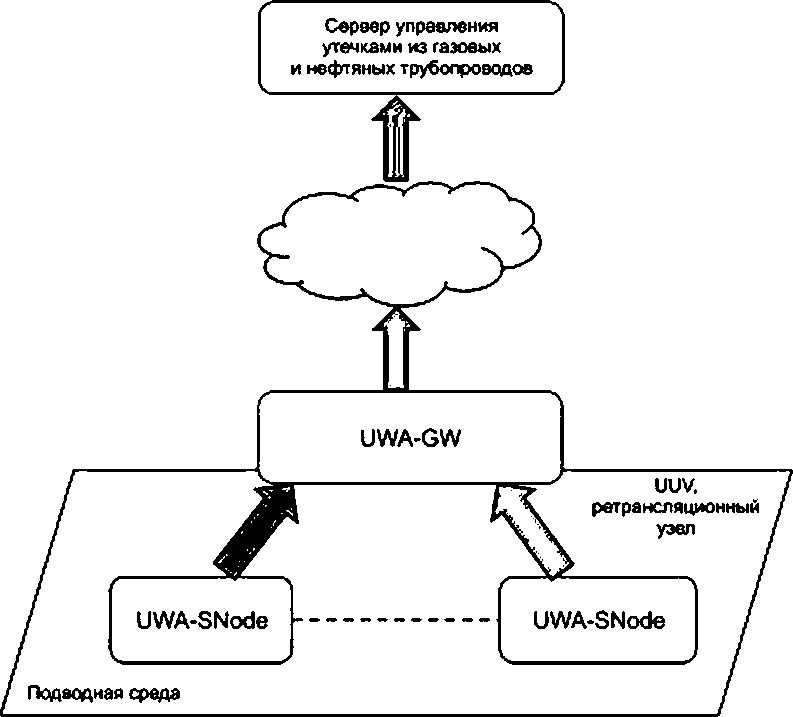
А.2.3 Поток данных
См. рисунок А.3.
UWA-SNode предоставляют данные датчиков серверу через UWA-GW.
Сервер хранит эти данные в базе данных.
Пользователи приложения постоянно отслеживают утечки из трубопроводов с помощью подводных данных.
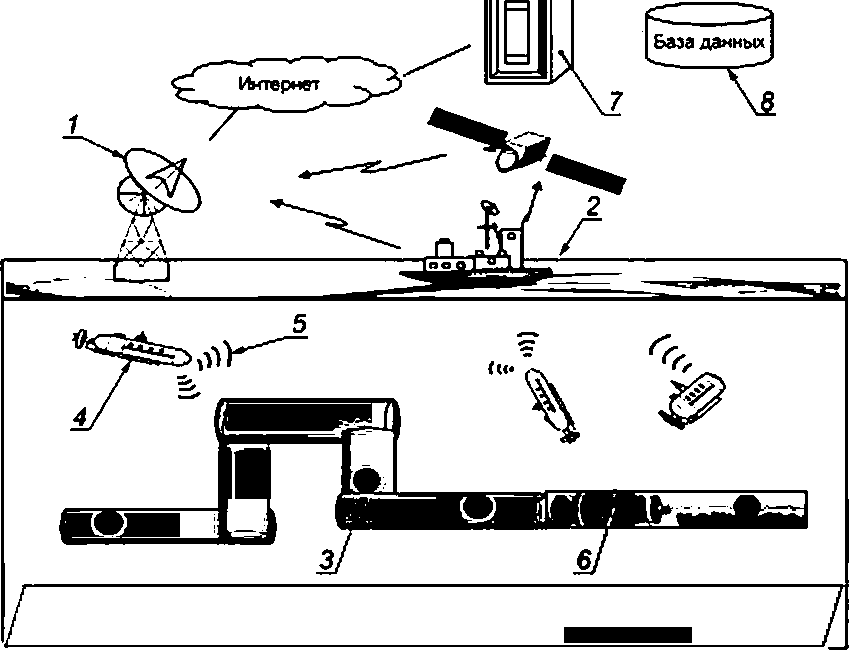 |
Рисунок А.3 - Поток данных при мониторинге утечек из газовых и нефтяных трубопроводов
А.2.4 Условия
Должен быть настроен масштаб сети UWASN при разворачивании узлов для обнаружения утечек из трубопроводов.
В зависимости от типа подводной среды требуется развертывание двухмерной или трехмерной топологии.
Для мониторинга окружающей среды необходимо использовать кросс-уровень для поддержки взаимной работы между UWA-SNode.
Для передачи и получения данных о подводной среде необходимо использовать подводный акустический модем.
В системе UWASN могут быть использованы фиксированные или мобильные узлы (например, UUV, ретрансляционный узел), которые передают данные об утечках из трубопроводов на узел UWA-GW.
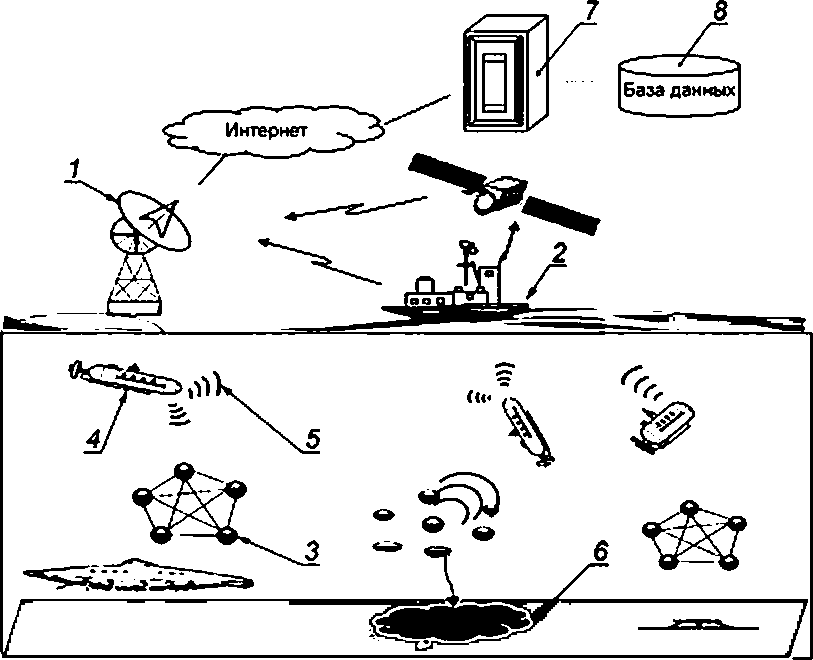
А.3 Освоение природных ресурсов
А.3.1 Описание
UWA-SNode могут быть использованы для определения и исследования объемного распределения марганцевых корок и минеральных ресурсов под водой. Окисленные минералы в морской воде осаждаются с образованием тонкого слоя корок. Информация, полученная отдатчиков, обрабатывается для выявления участков корок. Для глубоководного освоения природных ресурсов данная система может быть использована в большом масштабе для сканирования больших и глубоких пространств.
См. рисунок А.4.
 |
1 - базовая станция; 2 - UWA-GW; 3 - UWA-SNode; 4 - UUV; 5 - акустическая связь; 6 - освоение природных ресурсов в подводной среде; 7 - сервер управления освоения природных ресурсов; 8 - база данных
Рисунок А.4 - Приложение освоения природных ресурсов в подводной среде
А.3.2 Физические сущности
Акустическое устройство: используется для измерения толщины слоев марганцевой корки.
Система визуального картирования: используется для создания трехмерных цветных реконструкций морского дна.
UWA-SNode: целью является сообщение данных датчиков.
UWA-GW: выступает в качестве посредника между UWA-SNode и UWA-GW.
Ретрансляционный узел: пересылает данные датчиков.
Пользователь: целью является мониторинг системы.
А.3.3 Поток данных
UWA-SNode предоставляет данные датчиков ретрансляционным узлам.
Ретрансляционные узлы передают информацию в UWA-GW.
Базовая станция получает данные от UWA-GW и передает их на сервер, данные подводных измерений сохраняются в базе данных.
Пользователи приложения получают доступ к данным подводных измерений через сервер и таким образом контролируют окружающую среду.
А.3.4 Условия
Навигационные данные транспортного средства необходимы для определения толщины корок.
В системе UWASN используется акустическое устройство для передачи удаленных акустических измерений, связанных с толщиной марганцевых корок.
Необходимо использовать сжатие данных для экономии энергии.
Для агрегации данных всех слоев выявленных марганцевых корок требуется управление синхронизацией времени.
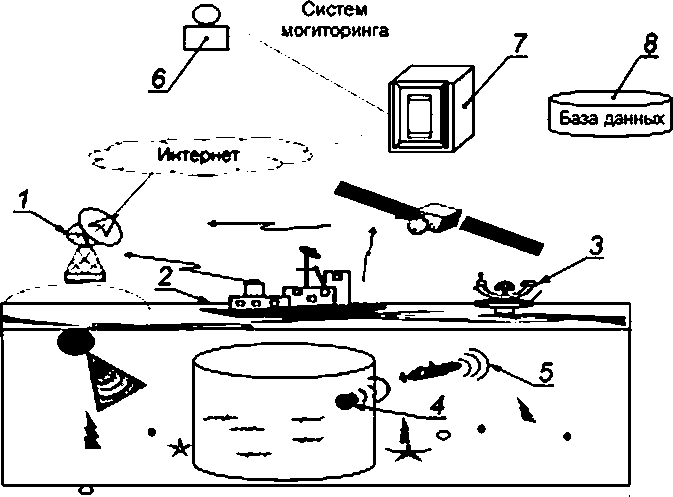
А.4 Рыбоводство
А.4.1 Описание
См. рисунок А.5.
 |
1 - базовая станция; 2 - UWA-GW; 3 - буй; 4 - UWA-SNode; 5 - акустическая связь; 6 - пользователь; 7 - сервер мониторинга; 8 - база данных качества рыбоводства
Рисунок А.5 - Приложение мониторинга для рыбоводства
А.4.2 Физические сущности
UWA-SNode: целью является сообщение данных датчиков.
UWA-GW: выступает в качестве посредника между UWA-SNode и UWA-GW.
Ретрансляционный узел: пересылает данные датчиков.
Пользователь: целью является мониторинг системы.
А.4.3 Поток данных
Ретрансляционные узлы передают информацию в UWA-GW.
Базовая станция получает данные от UWA-GW и передает их на сервер, а данные подводных измерений сохраняются в базе данных.
Пользователи приложения получают доступ к данным подводных измерений через сервер и таким образом контролируют окружающую среду.
А.4.4 Условия
Система UWASN обеспечивает масштабирование сети при развертывании узлов для мониторинга условий среды обитания.
В зависимости от площади фермерского хозяйства с учетом глубины требуется развертывание двухмерной или трехмерной топологии.
Хотя кросс-уровень является необязательным для UWASN, он должен быть использован при подводном мониторинге рыбоводства, поскольку минимизирует потребление энергии.
Для обеспечения успешной связи между подводными устройствами UWASN используется синхронизация времени передачи.
А.5 Безопасность порта
А.5.1 Описание
UWA-SNode предоставляет некоторые способы обнаружения различных объектов для военного применения. UWA-SNode может быть использован в качестве помощника при поиске подводных мин, подводных лодок, а также для мониторинга и наблюдения. Приложениями UWA-SNode являются обнаружение скрытых мин под водой для беспроблемного плавания, локализация подводных лодок при увеличении контролируемого пространства, уменьшении рисков и уменьшении трудоемкости, а также обнаружение любого нежелательного вторгшегося объекта. Для военного применения акустика является предпочтительной, поскольку она покрывает большие расстояния с использованием UWA-SNode.
См. рисунок А.6.
 |
1 - базовая станция; 2 - UWA-GW; 3 - UWA-SNode; 4 - UUV; 5 - акустическая связь; 6 - обнаружение мин; 7 - сервер управления безопасностью порта
Рисунок А.6 - Приложение мониторинга безопасности порта
А.5.2 Физические сущности
UWA-SNode: целью является сообщение данных датчиков.
UWA-GW: выступает в качестве посредника между UWA-SNode и UWA-GW.
Ретрансляционный узел: пересылает данные датчиков.
Пользователь: целью является мониторинг безопасности.
А.5.3 Поток данных
UWA-SNode сначала развертываются на поверхности, а затем на некоторой глубине, что обеспечивает максимальное покрытие.
UWA-SNode предоставляют данные датчиков ретрансляционным узлам.
Ретрансляционные узлы передают информацию в UWA-GW.
Базовая станция получает данные от UWA-GW и передает их на сервер, данные подводных измерений сохраняются в базе данных.
Пользователи приложения получают доступ к данным подводных измерений через сервер и таким образом контролируют окружающую среду.
А.5.4 Условия
При развертывании узлов в UWASN требуется обеспечить максимальную зону покрытия. Система UWASN должна обеспечивать масштабирование сети при развертывании узлов для обнаружения скрытых подводных лодок и мониторинга подводной среды вблизи морского побережья.
Для экономии энергии необходимы период передачи данных и сжатие данных.
Для поддержки взаимной работы между UWA-SNode требуется кросс-уровень.
Для передачи и приема данных подводных датчиков должен быть использован подводный акустический модем.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных национальных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте
Таблица ДА.1
Обозначение ссылочного национального стандарта | Степень соответствия | Обозначение и наименование ссылочного международного стандарта |
ПНСТ 519-2021 (ИСО/МЭК 29182-2:2013) | MOD | ISO/IEC 29182-2:2013 "Информационные технологии. Сенсорные сети. Типовая архитектура для сенсорных сетей (SNRA). Часть 2. Словарь и терминология" |
Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандарта: - MOD - модифицированный стандарт. | ||
Библиография
[1] | ISO/IEC 27033-6:2016, Information technology - Security techniques - Network security - Part 6: Securing wireless IP network access |
[2] | ISO/IEC TR 29108:2013, Information technology - Terminology for intelligent homes |
[3] | NOWSHEEN N., GOUR K., JOARDER K. An opportunistic message forwarding protocol for underwater acoustic sensor networks, Asia-Pacific Conference on Communications (APCC). 2013, pp.172-177 |
[4] | KALYANI M. et al. GUID for Mobility First Architecture Supporting loUT. International Journal of Multimedia and Ubiquitous Engineering. 2014, 9 pp.95-110 |
[5] | STOJANOVIC M., PREISIG J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47 (1) pp.84-89 |
[6] | LANBO L., ZHOU S., CUI J. Prospects and problems of wireless communication for underwater sensor networks. Wirel. Commun. Mob. Comput. 2008, 8 pp.977-994 |
[7] | XAVIER J., MOURA A. Modulation analysis for an underwater communication channel. University of Porto, 2012 |
[8] | RICE J., DALE G. Underwater acoustic communications and networks for the US navy’s sea web program. Sensor Technologies and Applications. SENSORCOM, 2008, pp.715-22 |
[9] | DAHL P.H. et al. Underwater ambient noise. Acoustics Today. 2007, 3 (1) pp.23-33 |
[10] | CHE X. et al. TDMA frame design for a prototype underwater RF communication network. Ad Hoc Netw. 2012, 10 (3) pp.317-327 |
[11] | JIANG S. et al. Electromagnetic wave propagation into fresh water. Journal of Electromagnetic Analysis and Applications. 2011, 7 p.261 |
[12] | CHE X. et al. Re-evaluation of RF electromagnetic communication in underwater sensor networks. IEEE Commun. Mag. 2010, 48(12) pp.143-151 |
[13] | TONG B. et al. Node reclamation and replacement for long-lived sensor networks. IEEE Trans. Parallel Distrib. Syst. 2011, 9 pp.1550-1563 |
[14] | NIE J. et al. The Method of Multiple Surface Gateways Positioning in UWSNs. International Conference on Wireless Communications Networking and Mobile Computing (WiCOM). 2010 |
[15] | EROL-KANTARCI M., MOUFTAH H.T., OKTUG S. Localization techniques for underwater acoustic sensor networks. IEEE Commun. Mag. 2010, 48 (12) pp.152-158 |
[16] | IYER S., VIJAY R.D. Genetic algorithm based optimization technique for underwater sensor network positioning and deployment. Underwater Technology, UT, 2015, pp.1-6 |
[17] | POMPILI D., MELODIA T., AKYILDIZ I.F. Three-dimensional and two-dimensional deployment analysis for underwater acoustic sensor networks. Ad Hoc Netw. 2009, 7 (4) pp.778-790 |
[18] | CHEN W., FANG Y. Physical layer design consideration for underwater acoustic sensor networks. Comput. Sci. Inf. Technol. 2010, 9 pp.606-609 [ICCSIT] |
УДК 004.93’1:006.89:006.354 | ОКС 35.110 |
Ключевые слова: подводная акустическая сенсорная сеть, UWASN, общие положения | |
{kind=link}