ГОСТ Р 55534-2013
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Глобальная навигационная спутниковая система
СИСТЕМА ЭКСТРЕННОГО РЕАГИРОВАНИЯ ПРИ АВАРИЯХ
Методы испытаний навигационного модуля автомобильной системы вызова экстренных оперативных служб
Global navigation satellite system. Road accident emergency response system. Test methods for navigation module of in-vehicle emergency call system
ОКС 33.070.40
Дата введения 2014-01-01
Предисловие
1 РАЗРАБОТАН Некоммерческим партнерством "Содействие развитию и использованию навигационных технологий" (НП "ГЛОНАСС")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 363 "Радионавигация"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 28 августа 2013 г. N 599-ст
4 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в ГОСТ Р 1.0-2012 (раздел 8). Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (gost.ru)
1 Область применения
Настоящий стандарт распространяется на автомобильные системы и устройства вызова экстренных оперативных служб со встроенным навигационным модулем глобальной навигационной спутниковой системы (ГНСС).
Настоящий стандарт устанавливает методы испытаний навигационного модуля на соответствие требованиям ГОСТ Р 54620 в части навигационных характеристик и свойств.
Устанавливаемые настоящим стандартом методы испытаний могут использоваться для обязательного подтверждения соответствия автомобильной системы (устройства) вызова экстренных оперативных служб требованиям технических регламентов [1], [2], а также при проведении различных видов приемочных испытаний.
Настоящий стандарт может быть также применен для оценки соответствия навигационных характеристик и свойств аппаратуры спутниковой навигации требованиям, указанным в [1], [2], [3].
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р 8.568-97 Государственная система обеспечения единства измерений. Аттестация испытательного оборудования. Основные положения
ГОСТ Р 12.1.019-2009 Система стандартов безопасности труда. Электробезопасность. Общие требования и номенклатура видов защиты
ГОСТ Р 51794-2008 Глобальные навигационные спутниковые системы. Системы координат. Методы преобразований координат определяемых точек
ГОСТ Р 52230-2004 Электрооборудование автотракторное. Общие технические условия
ГОСТ Р 52928-2010 Система спутниковая навигационная глобальная. Термины и определения
ГОСТ Р 54620-2011 Глобальная навигационная спутниковая система. Система экстренного реагирования при авариях. Автомобильная система вызова экстренных оперативных служб. Общие технические требования
ГОСТ 12.1.030-81 Система стандартов безопасности труда. Электробезопасность. Защитное заземление, зануление
ГОСТ 12.3.019-80 Система стандартов безопасности труда. Испытания и измерения электрические. Общие требования безопасности
ГОСТ 18321-73 Статистический контроль качества. Методы случайного отбора выборок штучной продукции
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины, определения, обозначения и сокращения
3.1 В настоящем стандарте применены термины по ГОСТ Р 52928, а также следующие термины с соответствующими определениями:
3.1.1 автомобильная система/устройство вызова экстренных оперативных служб; (АС): Система (устройство), устанавливаемые на колесном транспортном средстве соответствующей категории и предназначенные для определения координат, скорости и направления движения транспортного средства с помощью сигналов глобальной навигационной спутниковой системы ГЛОНАСС совместно с другой действующей ГНСС, передачи сообщения о транспортном средстве при дорожно-транспортном и ином происшествиях в автоматическом (система) или ручном (устройство) режиме и двустороннюю голосовую связь с экстренными оперативными службами по сетям подвижной радиотелефонной связи.
Примечания:
1 Автомобильная система вызова экстренных оперативных служб предназначена для оснащения транспортных средств категорий М1 и N1 с технически допустимой массой менее 2,5 т.
2 Автомобильное устройство вызова экстренных оперативных служб предназначено для оснащения транспортных средств категорий М1 и N1 с технически допустимой массой более 2,5 т, М2, М3, N2 и N3.
3 Автомобильная система вызова экстренных оперативных служб позволяет осуществление передачи сообщения о транспортном средстве при дорожно-транспортном и ином происшествиях также и в ручном режиме.
4 Автомобильное устройство вызова экстренных оперативных служб может осуществлять передачу сообщения о транспортном средстве при дорожно-транспортном и ином происшествиях также и в автоматическом режиме. Типы аварий транспортного средства, определяемых автоматически, и сроки реализации устройством функции автоматической передачи сообщения о транспортном средстве устанавливаются в [1], [2].
3.1.2 аппаратура спутниковой навигации: Аппаратно-программное устройство, устанавливаемое на транспортное средство для определения его текущего местоположения, направления и скорости движения по сигналам глобальной навигационной спутниковой системы ГЛОНАСС совместно с другой действующей ГНСС, обмена данными с дополнительным бортовым оборудованием, а также для обмена информацией по сетям подвижной радиотелефонной связи.
3.1.3 навигационный модуль (навигационный приемник) ГНСС: Составная часть (компонент) автомобильной системы/устройства вызова экстренных оперативных служб, предназначенная для определения текущих координат, параметров движения (направления и скорости) транспортного средства, а также времени по сигналам ГЛОНАСС, GPS и других глобальных навигационных спутниковых систем.
Примечание - Навигационный модуль, входящий в состав АС, может быть как встроенным в АС, так и внешним по отношению к ней (встроен в электронный блок другой автомобильной системы или устройства, установленных на транспортном средстве).
3.1.4
система экстренного реагирования при авариях (система "ЭРА-ГЛОНАСС"): Федеральная государственная автоматизированная навигационно-информационная система, функционирующая с использованием сигналов глобальной навигационной спутниковой системы Российской Федерации (ГЛОНАСС) стандартной точности, реализующая доставку сообщений о дорожно-транспортных происшествиях и иных чрезвычайных ситуациях на автомобильных дорогах Российской Федерации экстренным оперативным службам. Примечание - Аналогом системы "ЭРА ГЛОНАСС" является разрабатываемая общеевропейская система eCall, с которой система "ЭРА-ГЛОНАСС" гармонизирована по основным функциональным свойствам (использование тонального модема как основного механизма передачи данных; унифицированные состав и формат обязательных данных, передаваемых в составе минимального набора данных, единообразные правила установления и завершения двустороннего голосового соединения с лицами, находящимися в кабине транспортного средства и др.). [ГОСТ Р 54620-2011, статья 3.1.12] |
3.1.5 режим "холодного" старта: состояние навигационного модуля ГНСС, при котором системное время, координаты местоположения, альманах ГНСС и эфемериды навигационных космических аппаратов неизвестны.
Примечание - Имеются в виду координаты местоположения фазового центра антенны ГНСС, подключенной к навигационному модулю.
3.1.6 режим тестирования: Режим функционирования АС, предназначенный для проверки функциональных свойств и параметров АС как при эксплуатации системы/устройства в составе транспортного средства, так и при проведении различных испытаний АС.
3.2 В настоящем стандарте применены следующие обозначения и сокращения:
ВАЦ | - | векторный анализатор цепей; |
ГЛОНАСС | - | глобальная навигационная спутниковая система Российской Федерации; |
НАП | - | навигационная аппаратура потребителей; |
НКА | - | навигационный космический аппарат; |
НС | - | навигационные сигналы; |
ОЗУ | - | оперативное запоминающее устройство; |
ПЗ-90 | - | общеземная геоцентрическая система координат "Параметры Земли 1990 года"; |
ПК | - | персональный компьютер; |
РЭ | - | руководство по эксплуатации; |
СИ | - | сценарий имитации; |
СК | - | система координат; |
СКО | - | среднее квадратическое отклонение; |
СПО | - | специальное программное обеспечение; |
СТ | - | навигационный сигнал стандартной точности в ГНСС ГЛОНАСС, доступный широкому кругу гражданских потребителей; |
ТС | - | транспортное средство; |
ЭД | - | эксплуатационная документация; |
С/А | - | псевдослучайный код, используемый в навигационных сигналах ГНСС GPS, доступных широкому кругу гражданских потребителей; |
DTM | - | сообщение протокола NMEA-0183, содержащее информацию об используемой системе координат; |
GPS | - | глобальная навигационная спутниковая система Соединенных Штатов Америки; |
GGA | - | сообщение протокола NMEA-0183, содержащее информацию о времени, местоположении и годности навигационного решения; |
GSA | - | сообщение протокола NMEA-0183, содержащее информацию о спутниках в навигационном решении; |
GSV | - | сообщение протокола NMEA-0183, содержащее информацию о видимых спутниках; |
GSM | - | Global System for Mobile communications (глобальный цифровой стандарт для мобильной сотовой связи); |
PDOP | - | Position Dilution of Precision (геометрический фактор точности определения местоположения потребителя ГНСС в пространстве); |
PIRTR | - | запрос на изменение параметров выдачи координат и времени в протоколе NMEA-0183; |
RS | - | Recommended Standard (рекомендованный стандарт); |
RMC | - | сообщение протокола NMEA-0183, содержащее рекомендованный минимум навигационных данных; |
SIM | - | Subscriber Identity Module (модуль идентификации абонента, SIM-карта); |
USB | - | Universal Serial Bus (универсальная последовательная проводная шина); |
VTG | - | сообщение протокола NMEA-0183, содержащее наземный курс и скорость; |
WGS-84 | - | Всемирная геодезическая система координат. |
4 Общие положения
4.1 Объектом испытаний является АС, в состав которой входит навигационный модуль (навигационный приемник ГНСС) и антенна ГНСС, определяющие навигационные характеристики и свойства испытываемой системы.
4.1.1 Общее число испытываемых образцов АС должно быть не менее 3 шт.
4.1.2 АС представляется на испытания в составе, определенном в ГОСТ Р 54620 (раздел 5), вместе с РЭ и программным обеспечением (на электронном носителе).
4.1.3 Прилагаемые документы на АС должны содержать:
- серийный номер устройства;
- версию аппаратной платформы;
- версию программного обеспечения;
- идентификатор поставщика устройства.
Примечание - Для проведения испытаний должен быть представлен оригинал РЭ, содержащий указанные сведения.
4.1.4 Навигационный модуль (навигационный приемник ГНСС) должен выдавать во внешние устройства измеренные навигационные параметры в формате протокола NMEA-0183 (сообщения RMC, GGA, VTG, GSA, DTM и GSV) [5]. Порядок настройки АС для выдачи во внешние устройства указанной информации должен быть отражен в РЭ.
4.1.5 Образцы, представленные на испытания, должны быть отобраны уполномоченным представителем испытательной лаборатории (органа по сертификации) из партии готовой продукции, принятой техническим контролером организации-изготовителя. По результатам отбора образцов составляется акт, разрабатываемый по форме в соответствии с приложением А.
4.2 Цель испытаний
Цель испытаний состоит в оценке соответствия навигационных характеристик и свойств АС, определяемых входящим в ее состав навигационным модулем, требованиям, установленным в ГОСТ Р 54620 (подраздел 8.1).
4.3 Условия проведения испытаний
4.3.1 Испытания АС проводят в режиме тестирования.
4.3.2 Испытания проводят в нормальных климатических условиях, характеризуемых следующими значениями климатических факторов по ГОСТ Р 52230 (подпункт 4.2):
- температура воздуха - (25±10) °С;
- относительная влажность воздуха от 45% до 80%;
- атмосферное давление от 84,0 до 106,7 кПа (от 630 до 800 мм рт.ст.).
Примечание - При проведении операций испытаний образец может находиться в диапазоне рабочих температур, указанных в ЭД.
4.3.3 Питание испытываемой АС осуществляется от имитатора бортовой сети транспортного средства. Процедура испытаний "включить/выключить" АС, отраженная в соответствующих пунктах методов испытаний, изложенных в разделе 5, соответствует процедуре "включить/выключить" зажигание ТС и должна осуществляться с помощью тумблера или иного выключателя, подающего (отключающего) питание имитатора бортовой сети.
4.3.4 Техническое обслуживание испытываемых образцов в процессе испытаний не производится.
4.3.5 Испытательные режимы указаны в соответствующих пунктах методов испытаний, приведенных в разделе 5.
4.3.6 Для проведения испытаний АС в части навигационного модуля ГНСС применяется испытательное и вспомогательное оборудование, а также средства измерений, указанные в таблице Б.1 (приложение Б). Вместо указанных в таблице Б.1 средств испытаний допускается применять другие аналогичные средства, обеспечивающие определение характеристик спутниковой навигационной аппаратуры с требуемой точностью.
4.4 Требования по безопасности труда, предъявляемые при проведении испытаний:
- все виды работ, проводимые при испытаниях, необходимо выполнять в соответствии с [4];
- включение используемых при испытаниях средств измерений и испытательного оборудования разрешается производить только при подключенном к ним внешнем заземлении;
- подключение и отключение кабелей, устройств и средств измерений разрешается производить только при выключенном напряжении питания всех приборов, входящих в состав испытательной установки, и отключенной от цепей питания испытываемого образца.
При проведении испытаний необходимо соблюдать требования ГОСТ Р 12.1.019, ГОСТ 12.1.030, ГОСТ Р 12.3.019, а также требования безопасности, изложенные в ЭД на АС, измерительное и испытательное оборудование.
4.5 Объем испытаний (проверок)
Состав и рекомендуемая последовательность испытаний (проверок) приведены в таблице 1.
Каждый из видов испытаний, указанных в таблице 1, проводится на каждом из образцов, представленных на испытания.
Примечание - Допускается изменение последовательности проверок с сохранением условий и режимов, приведенных в соответствующем разделе методик.
Таблица 1 - Состав и рекомендуемая последовательность испытаний
Виды испытания (проверки) | Требование по ГОСТ Р 54620 | Номер подраздела |
Проверка возможности приема и обработки навигационных сигналов стандартной точности в диапазоне L1 ГНСС ГЛОНАСС с целью определения координат местоположения и составляющих вектора скорости транспортного средства | 8.1.2, 8.1.5 | 5.1 |
Проверка возможности приема и обработки навигационных сигналов стандартной точности в диапазоне L1 ГНСС GPS с целью определения координат местоположения и составляющих вектора скорости транспортного средства | 8.1.3, 8.1.4 | 5.2 |
Проверка возможности приема и обработки навигационных сигналов стандартной точности в диапазоне L1 ГНСС ГЛОНАСС и GPS с целью определения координат местоположения и составляющих вектора скорости транспортного средства | 3.1.1 | 5.3 |
Проверка возможности выдачи во внешние устройства информации о навигационных параметрах в формате NMEA-0183 | 8.1.15 | 5.4 |
Проверка алгоритма автономного контроля достоверности навигационных определений и исключения недостоверных измерений (RAIM) | 8.1.4 | 5.5 |
Проверка возможности определения навигационных параметров в системах координат ПЗ-90 и WGS-84 | 8.1.6 | 5.6 |
Оценка погрешности определения координат в плане и высоты в автономном статическом режиме | 8.1.7 | 5.7 |
Оценка погрешности определения координат в плане, высоты и скорости в динамическом режиме | 8.1.7 | 5.8 |
Проверка минимального временного интервала обновления обсервационных данных | 8.1.8 | 5.9 |
Проверка времени восстановления слежения за сигналами рабочего созвездия НКА после срыва слежения из-за затенения | 8.1.9 | 5.10 |
Определение времени решения навигационной задачи в режиме "холодного" старта | 8.1.10 | 5.11 |
Определение чувствительности навигационного модуля ГНСС в режимах: | 8.1.11 | 5.12 |
Проверка возможности изменения частоты выдачи данных в требуемом диапазоне значений с помощью параметра настройки GNSS_DATA_RATE | 8.1.12, 8.1.13 | 5.13 |
Проверка минимального угла возвышения (угла отсечки) навигационных космических аппаратов | 8.1.14 | 5.14 |
Проверка времени отключения питания навигационного модуля (навигационного приемника ГНСС) после выключения зажигания | 8.1.16 | 5.15 |
Проверка выполнения требований назначения при воздействии гармонических помех | 8.1.17 | 5.16 |
Проверка обеспечения слежения за сигналами ГНСС при воздействии импульсных помех | 8.1.18 | 5.17 |
4.6 Если при проведении испытаний вычисление погрешностей определения навигационным модулем координат местоположения и скорости движения осуществляется с помощью специального программного обеспечения, то программы для проведения необходимых расчетов должны основываться на использовании формул, приведенных в разделе 5.
4.7 Используемое при испытаниях испытательное оборудование должно быть аттестовано по ГОСТ Р 8.568 и иметь свидетельство об аттестации с не истекшим сроком аттестации на период проведения испытаний.
4.8 Все средства испытаний должны быть исправны, иметь свидетельство об утверждении типа (для средств измерений).
4.9 Средства измерений должны быть поверены (иметь свидетельства о поверке или оттиск поверительного клейма на приборе или в ЭД с не истекшим сроком поверки на период проведения испытаний).
4.10 Отчетность по результатам испытаний
По результатам испытаний (проверки) оформляют протокол испытаний и измерений, в котором указывают:
- наименование испытательной лаборатории (центра), местонахождение, телефон, факс и адрес электронной почты;
- идентификационные параметры испытываемого образца;
- условия проведения испытаний;
- описание методики проведения испытаний и измерений со ссылкой на настоящий стандарт;
- используемое испытательное оборудование и средства измерений;
- результаты измерений навигационных характеристик и свойств в отношении навигационного модуля ГНСС, входящего в состав АС;
- перечень разделов (пунктов и подпунктов) нормативных документов (ГОСТ Р и др.), содержащих требования, соответствие которым устанавливается, и результаты оценки соответствия в отношении каждого отдельного требования;
- заключение о соответствии испытываемого образца установленным требованиям;
- должность, фамилия и подпись лица, проводившего испытания и измерения;
- должность, фамилия и подпись руководителя испытательной лаборатории (центра), заверенная печатью испытательной лаборатории (центра);
- дата проведения испытаний и измерений, дата оформления и регистрационный номер протокола.
5 Методы испытаний
5.1 Проверка возможности приема и обработки навигационных сигналов стандартной точности в диапазоне L1 ГНСС ГЛОНАСС с целью определения координат местоположения и составляющих вектора скорости транспортного средства
5.1.1 Собрать схему в соответствии с рисунком Д.1 (Приложение Д).
5.1.2 Подготовить АС к работе согласно РЭ. Включить АС и с помощью РЭ и программного обеспечения разработчика настроить навигационный модуль на прием сигналов только ГНСС ГЛОНАСС.
Примечание - Здесь и далее по тексту операция "включить АС" подразумевает реализацию процедуры в соответствии с 4.3.3.
5.1.3 Подготовить имитатор к работе в соответствии с РЭ на него. Запустить сценарий имитации только по сигналам ГНСС ГЛОНАСС с параметрами траектории движения, приведенными в таблице В.2.
5.1.4 Испытание по проверке возможности приема и обработки сигналов ГНСС ГЛОНАСС проведено успешно, если определены координаты местоположения и составляющие вектора скорости АС, отображение которых можно наблюдать на ПК.
5.2 Проверка возможности приема и обработки навигационных сигналов стандартной точности в диапазоне L1 ГНСС GPS с целью определения координат местоположения и составляющих вектора скорости транспортного средства
5.2.1 Собрать схему в соответствии с рисунком Д.1.
5.2.2 Подготовить АС к работе согласно РЭ. Включить АС и с помощью РЭ и программного обеспечения разработчика настроить навигационный модуль на прием сигналов только ГНСС GPS.
5.2.3 Подготовить имитатор к работе в соответствии с РЭ на него. Запустить СИ только по сигналам ГНСС GPS с параметрами траектории движения, приведенными в таблице В.2.
5.2.4 Испытание по проверке возможности приема и обработки сигналов ГНСС GPS проведено успешно, если определены координаты местоположения АС, отображение которых можно наблюдать на ПК.
5.3 Проверка возможности приема и обработки навигационных сигналов стандартной точности в диапазоне L1 ГНСС ГЛОНАСС и GPS с целью определения координат местоположения и составляющих вектора скорости транспортного средства
5.3.1 Собрать схему в соответствии с рисунком Д.1.
5.3.2 Подготовить АС к работе согласно руководству по эксплуатации. Включить АС и с помощью РЭ и программного обеспечения разработчика настроить навигационный модуль на прием сигналов ГНСС ГЛОНАСС и GPS.
5.3.3 Подготовить имитатор к работе в соответствии с РЭ на него. Запустить СИ по сигналам ГНСС ГЛОНАСС и GPS с параметрами траектории движения, приведенными в таблице В.2.
5.3.4 Испытание по проверке возможности приема и обработки сигналов ГНСС ГЛОНАСС и GPS проведено успешно, если определены координаты местоположения АС, отображение которых можно наблюдать на ПК.
5.4 Проверка возможности выдачи во внешние устройства информации о навигационных параметрах в формате NMEA-0183
5.4.1 Собрать схему в соответствии с рисунком Д.1.
5.4.2 Подготовить АС к работе согласно РЭ. Включить АС и с помощью РЭ и программного обеспечения разработчика настроить навигационный модуль на прием сигналов ГНСС ГЛОНАСС и GPS. Настроить навигационный модуль на выдачу сообщений NMEA-0183 (сообщения RMC, GGA, VTG, GSA и GSV по [5]).
5.4.3 Подготовить имитатор к работе в соответствии с РЭ на него. Запустить сценарий имитации сигналов ГНСС ГЛОНАСС/GPS с параметрами, приведенными в таблице В.1.
5.4.4 Установить по соответствующему интерфейсу соединение АС с ПК. Проконтролировать возможность получения навигационной информации по протоколу NMEA-0183 [5].
5.4.5 Результат испытаний считать положительным, если получена навигационная информация по протоколу NMEA-0183 [5].
5.5 Проверка алгоритма автономного контроля достоверности навигационных определений и исключения недостоверных измерений (RAIM)
5.5.1 Собрать схему в соответствии с рисунком Д.1.
5.5.2 Сформировать сценарий имитации с помощью специального программного обеспечения для имитатора сигналов ГНСС ГЛОНАСС/GPS с параметрами, приведенными в таблице В.1, с моделируемыми ошибками эфемеридно-временной информации для любых трех НКА ГНСС ГЛОНАСС/GPS через 10 мин после начала сценария имитации.
5.5.3 Запустить сформированный сценарий имитации на исполнение.
5.5.4 После 10 мин исполнения сценария имитации с помощью специального программного обеспечения для навигационного модуля ГНСС убедиться в отсутствии приема сигналов НКА, для которых моделируются ошибки эфемеридно-временной информации.
5.5.5 Результаты испытаний считать положительными, если выполнены требования 5.5.4.
5.6 Проверка возможности определения навигационных параметров в системах координат ПЗ-90 и WGS-84
5.6.1 Собрать схему в соответствии с рисунком Д.1.
5.6.2 Подготовить АС к работе согласно РЭ. Включить АС и с помощью РЭ и программного обеспечения разработчика настроить навигационный модуль на прием сигналов ГНСС ГЛОНАСС и на выдачу навигационных параметров в системе координат ПЗ-90.
Примечание - Допускается использование сообщения PIRTR для установки рабочей системы координат [5].
5.6.3 Подготовить имитатор к работе в соответствии с РЭ на него. Запустить СИ только по сигналам ГНСС ГЛОНАСС с параметрами траектории движения, приведенными в таблице В.1.
5.6.4 Убедиться, что навигационные параметры с использованием сигналов ГЛОНАСС успешно рассчитаны и отображаются в системе координат ПЗ-90 (сообщение DTM по [5]).
5.6.5 Настроить навигационный модуль на выдачу сообщений по протоколу NMEA-0183 (сообщения GGA, RMC, VTG, GSA и GSV по [5]) с частотой 1 Гц.
5.6.6 Записать в файл сообщения, выдаваемые навигационным модулем ГНСС, до момента завершения выбранного СИ.
5.6.7 Повторить процедуры испытаний по 5.6.1-5.6.5 для рабочей системы координат WGS-84.
5.6.8 Выбрать из каждого массива данных, записанного по 5.6.6, 50 сообщений GGA (RMC) в одни и те же моменты времени.
5.6.9 В соответствии с ГОСТ Р 51794 провести пересчет координат из системы координат, в которой проведены измерение, в другую систему.
5.6.10 Сравнить определенные при испытаниях и пересчитанные координаты, учитывая допустимые значения погрешности определения координат местоположения, указанные в ГОСТ Р 54620 (пункт 8.1.7).
5.6.11 Результаты испытаний считать положительными, если массив координат, полученный при испытаниях, соответствует расчетному.
5.7 Оценка погрешности определения координат в плане и высоты в автономном статическом режиме
5.7.1 Собрать схему в соответствии с рисунком Д.1.
5.7.2 Подготовить АС к работе согласно РЭ. Включить АС и с помощью программного обеспечения разработчика убедиться, что навигационный модуль настроен на прием сигналов ГНСС ГЛОНАСС и GPS, а значение параметра настройки GNSS_MIN_ELEVATION установлено равным 5 градусам. Настроить навигационный модуль на выдачу сообщений по протоколу NMEA-0183 (сообщения GGA, RMC, VTG, GSA и GSV по [5]) с частотой 1 Гц.
Примечание - Настройка частоты выдачи навигационных сообщений навигационным модулем АС осуществляется с помощью параметра установки GNSS_DATA_RATE.
5.7.3 Подготовить имитатор к работе в соответствии с РЭ на него. Запустить СИ только по сигналам ГНСС ГЛОНАСС с параметрами имитации, приведенными в таблице В.1.
5.7.4 При получении после запуска СИ навигационного решения обеспечить запись в файл сообщений, выдаваемых навигационным модулем ГНСС, до момента завершения выбранного СИ.
5.7.5 Выделить из файла информацию, содержащуюся в сообщениях GGA (RMC), об определенных в ходе испытаний координатах местоположения: широты (В), долготы (L) и высоты (Н).
5.7.6 Рассчитать систематическую погрешность определения координат на интервалах стационарности по формулам (1), (2), например, для координаты В (широта):
![]() , (1)
, (1)
![]() , (2)
, (2)
где - действительное значение координаты В в
-й момент времени, угл. с;
- определенное навигационным модулем значение координаты В в
-й момент времени, угл. с;
- число сообщений GGA (RMC), поступивших при испытаниях от навигационного модуля.
Аналогичным образом рассчитать систематические погрешности определения координат L (долгота) и Н (высота).
Примечание - Определяемые при испытаниях значения высоты исчисляются в метрах.
5.7.7 Рассчитать среднее квадратическое отклонение результата определений координат по формуле (3), например, для координаты В:
 , (3)
, (3)
Аналогичным образом рассчитать СКО результата определений координат L и Н.
5.7.8 Перевести рассчитанные значения погрешности определения широты и долготы из угловых секунд в метры по формулам (4), (5):
- для широты:
 , (4)
, (4)
- для долготы:
 , (5)
, (5)
где - большая полуось эллипсоида, м;
- первый эксцентриситет;
- текущая широта, рад.
5.7.9 Рассчитать погрешность определения координат в плане и высоты (при доверительной вероятности 0,95) по формулам (6) и (7) соответственно:
![]() , (6)
, (6)
![]() . (7)
. (7)
5.7.10 Повторить процедуры испытаний по 5.7.3-5.7.9 по СИ только сигналов ГHCC GPS с параметрами имитации, приведенными в таблице В.1.
5.7.11 Повторить процедуры испытаний по 5.7.3-5.7.9 по СИ сигналов совмещенного созвездия ГНСС ГЛОНАСС и GPS с параметрами имитации, приведенными в таблице В.1.
5.7.12 Повторить процедуры испытаний по 5.7.2-5.7.11 для остальных образцов АС, представленных на испытания.
5.7.13 Определить средние по результатам испытаний значения показателей (6) и (7) с учетом общего числа испытанных образцов АС.
5.7.14 Подключить к испытываемому образцу антенну ГНСС, входящую в состав системы и перевести навигационный модуль в режим приема сигналов соответствующей ГНСС. Повторить процедуры испытаний по 5.7.4-5.7.13 в реальном масштабе времени при подаче навигационных сигналов от антенны, расположенной на геодезическом пункте (реперной точке) по реальным сигналам:
- ГНСС ГЛОНАСС;
- ГНСС GPS;
- ГНСС ГЛОНАСС/GPS.
Примечание - Перевод навигационного модуля в режимы приема сигналов соответствующей ГНСС или совмещенного созвездия НКА ГНСС осуществляется порядком, изложенным в РЭ на АС.
5.7.15 Результаты испытаний считают удовлетворительными, если полученные в ходе испытаний погрешности (при доверительной вероятности 0,95) определения координат и высоты не превышают допустимых значений, указанных в ГОСТ Р 54620 (пункт 8.1.7).
5.8 Оценка погрешности определения координат в плане, высоты и скорости в динамическом режиме
5.8.1 Собрать схему в соответствии с рисунком Д.1.
5.8.2 Подготовить АС к работе согласно РЭ. Включить АС и с помощью программного обеспечения разработчика убедиться, что навигационный модуль настроен на прием сигналов ГНСС ГЛОНАСС и GPS, а значение параметра настройки GNSS_MIN_ELEVATION установлено равным 5°. Настроить навигационный модуль на выдачу сообщений по протоколу NMEA-0183 (сообщения GGA, RMC, VTG, GSA и GSV по [5]) с частотой 1 Гц.
Примечание - Настройка частоты выдачи навигационных сообщений навигационным модулем АС осуществляется с помощью параметра установки GNSS_DATA_RATE.
5.8.3 Подготовить имитатор к работе в соответствии с РЭ на него. Запустить СИ для движения с ускорением до максимальной скорости, установленной в эксплуатационной документации на испытываемую АС, с имитацией только сигналов ГНСС ГЛОНАСС (таблица В.2).
5.8.4 При получении после запуска СИ навигационного решения провести запись в файл сообщений, выдаваемых модулем ГНСС до момента завершения выбранного СИ.
5.8.5 Выделить из файла информацию, содержащуюся в сообщениях, об определенных навигационным модулем координатах (широты, долготы, высоты) и скорости движения.
5.8.6 Рассчитать погрешность определения координат в плане и высоты (для доверительной вероятности 0,95) по формулам (1)-(7).
5.8.7 Рассчитать систематическую погрешность и среднее квадратическое отклонение результата определения скорости по формулам (8)-(10):
![]() , (8)
, (8)
![]() , (9)
, (9)
 , (10)
, (10)
где - действительное значение скорости в
-й момент времени, м/с;
- измеренное значение скорости в
-й момент времени, м/с;
- число измерений сообщений RMC (VTG), поступивших при испытаниях от навигационного модуля.
5.8.8 Рассчитать погрешность (при доверительной вероятности 0,95) определения скорости по формуле (11):
![]() (11)
(11)
5.8.9 Перевести СИ движения с ускорением до максимальной скорости в режим имитации сигналов только ГНСС GPS и выполнить процедуры по 5.8.4-5.8.8.
5.8.10 Перевести СИ движения с ускорением до максимальной скорости в режим имитации сигналов совмещенного созвездия ГНСС ГЛОНАСС и GPS и выполнить процедуры по 5.8.4-5.8.8.
5.8.11 Повторить процедуры испытаний по 5.8.2-5.8.10 для остальных образцов АС, представленных на испытания.
5.8.12 Определить средние значения показателей формул (6), (7) и (11) по результатам испытаний АС с использованием СИ движения с ускорением до максимальной скорости (таблица В.2 (приложение В)) с учетом общего числа испытанных образцов АС.
5.8.13 Повторить процедуры испытаний по 5.8.2-5.8.12 для сценариев имитации движения с маневрированием (таблица В.3 (приложение В)) и движения в местах затенения и неуверенного приема навигационных сигналов (таблица В.4 (приложение В)).
5.8.14 Определить средние значения показателей (6), (7) и (11) по результатам испытаний АС в динамическом режиме с учетом общего числа сценариев имитации, реализованных для данного режима.
5.8.15 Результаты испытания АС в динамическом режиме считаются удовлетворительными, если полученные в ходе испытаний погрешности (при доверительной вероятности 0,95) определения координат в плане, высоты, а также скорости движения не превышают допустимых значений, указанных в ГОСТ Р 54620 (пункт 8.1.7).
5.9 Проверка минимального временного интервала обновления обсервационных данных
5.9.1 Проанализировать файл с результатами испытаний по 5.8. Убедиться в отсутствии одинаковых значений координат для смежных (по временной метке) сообщений GGA.
5.9.2 Результат испытания считать положительным, если выполняется условие в 5.9.1.
5.10 Проверка времени восстановления слежения за сигналами рабочего созвездия НКА после срыва слежения из-за затенения
5.10.1 Подготовить АС к работе согласно РЭ. Включить АС. С помощью программного обеспечения разработчика убедиться, что модуль ГНСС настроен на прием сигналов ГНСС ГЛОНАСС и GPS.
5.10.2 Подключить антенну ГНСС к АС.
5.10.3 Дождаться получения навигационного решения навигационным модулем АС.
5.10.4 Отключить антенну от АС (навигационного модуля АС) и вновь подключить через интервал времени от 20 до 60 с.
При помощи секундомера зафиксировать временной интервал между моментами отключения/подключения антенны и появлением в диалоговом окне интерфейсной программы информации о восстановлении слежения за НКА из рабочего созвездия (получения первого после подключения антенны навигационного решения).
5.10.5 Процедуру испытаний по 5.10.4 повторить не менее 30 раз.
5.10.6 По выборке из проведенных измерений рассчитать среднее значение времени восстановления слежения за сигналами рабочего созвездия НКА при выходе АС из зоны затенения с учетом числа образцов АС, представленных на испытания.
5.10.7 Результат испытания считать положительным, если среднее значение времени восстановления слежения за сигналами рабочего созвездия НКА после потери слежения из-за затенений не более 5 с после восстановления видимости НКА.
5.10.8 С помощью программного обеспечения разработчика АС и РЭ настроить навигационный модуль АС на прием сигналов только от НКА ГЛОНАСС и повторить процедуры испытаний по 5.10.2-5.10.7.
5.10.9 С помощью программного обеспечения разработчика АС и РЭ настроить навигационный модуль АС на прием сигналов только от НКА GPS и повторить процедуры испытаний по 5.10.2-5.10.7.
5.11 Определение времени решения навигационной задачи в режиме "холодного" старта
5.11.1 Подготовить АС к работе согласно РЭ. Включить АС. С помощью программного обеспечения разработчика убедиться, что модуль ГНСС настроен на прием сигналов ГНСС ГЛОНАСС и GPS.
5.11.2 Произвести сброс всех эфемерид НКА и альманахов систем из ОЗУ навигационного модуля ГНСС.
5.11.3 Подключить антенну ГНСС к АС. При помощи секундомера отметить временной интервал между моментами подключения антенны и появлением в диалоговом окне интерфейсной программы результата решения навигационной задачи.
5.11.4 Процедуры испытаний по 5.11.2 и 5.11.3 провести не менее 30 раз.
5.11.5 По выборке из проведенных измерений рассчитать среднее значение времени принятия решения навигационной задачи в режиме "холодного" старта (неизвестны альманах, эфемериды, время, координаты) с учетом числа образцов АС, представленных на испытания.
5.11.6 С помощью программного обеспечения разработчика АС и РЭ настроить навигационный модуль АС на прием сигналов только от НКА ГЛОНАСС и повторить процедуры испытаний по 5.11.2-5.11.5.
5.11.7 С помощью программного обеспечения разработчика АС и РЭ настроить навигационный модуль АС на прием сигналов только от НКА GPS и повторить процедуры испытаний по 5.11.2-5.11.5.
5.11.8 Результат испытания считать положительным, если средние значения интервала времени, рассчитанного по 5.11.5, не превышают 60 с.
5.12 Определение чувствительности навигационного модуля в режиме поиска (захвата) и в режиме удержания (слежения) сигналов ГНСС
5.12.1 Включить векторный анализатор цепей. Произвести калибровку ВАЦ согласно РЭ на него.
5.12.2 Собрать схему в соответствии с рисунком Д.2.
5.12.3 Установить на аттенюаторах нулевые значения ослабления тракта. Произвести измерения амплитудно-частотной характеристики данного тракта в частотном диапазоне L1 сигналов ГНСС ГЛОНАСС/GPS. Зафиксировать среднее значение коэффициента передачи тракта ![]() в [дБ] в данном диапазоне частот.
в [дБ] в данном диапазоне частот.
5.12.4 Собрать схему в соответствии с рисунком Д.3.
5.12.5 Подготовить АС к работе согласно РЭ. Включить АС. С помощью программного обеспечения разработчика убедиться, что навигационный модуль настроен на прием сигналов ГНСС ГЛОНАСС и GPS. Произвести сброс всех эфемерид НКА и альманах системы из ОЗУ навигационного модуля ГНСС, что соответствует режиму "холодного" старта навигационного модуля АС.
5.12.6 Установить на аттенюаторах значения ослабления тракта равным 110 дБ. Подготовить имитатор к работе в соответствии с РЭ на него. Запустить сценарий имитации сигналов ГНСС ГЛОНАСС/GPS с параметрами, приведенными в таблице В.1. На имитаторе установить уровень выходной мощности минус 150 дБВт.
5.12.7 Проконтролировать в диалоговом окне интерфейсной программы сброс даты, времени и координат.
5.12.8 С шагом 1 дБ уменьшать выставленное на аттенюаторах ослабление тракта (увеличивать мощность навигационного сигнала на входе навигационного модуля) до того момента, пока АС решит навигационную задачу. Зафиксировать показания аттенюаторов и с учетом значения коэффициента передачи тракта рассчитать значение чувствительности
навигационного модуля по формуле (12).
Примечание - Переключение аттенюаторов осуществлять с периодичностью не менее 120 с для контроля наличия/отсутствия навигационного решения, выдаваемого навигационным модулем АС.
![]() . (12)
. (12)
5.12.9 Установить на аттенюаторах значение ослабления тракта таким, чтобы уровень сигнала на антенном входе АС составил минус 160 дБВт. В течение 15 мин дать навигационному модулю возможность набрать эфемериды рабочих НКА и альманах ГНСС.
5.12.10 С шагом 1 дБ увеличивать выставленное на аттенюаторах ослабление тракта (уменьшать мощность навигационного сигнала) до момента сброса решения навигационной задачи. Зафиксировать, с учетом начального значения коэффициента передачи тракта, уровень сигнала ГНСС на антенном входе АС, при котором модуль ГНСС имел последнее решение навигационной задачи в режиме удержания (слежения).
5.12.11 Результаты испытаний считать положительными, если для всех образцов АС, представленных на испытания, зафиксированный в 5.12.8 уровень сигнала ГНСС на антенном входе АС в режиме поиска не более минус 163 дБВт и если зафиксированный в 5.12.10 уровень сигнала ГНСС на антенном входе АС в режиме удержания (слежения) не более минус 188 дБВт.
5.13 Проверка возможности изменения частоты выдачи данных в требуемом диапазоне значений с помощью параметра настройки GNSS_DATA_RATE
5.13.1 Собрать схему в соответствии с рисунком Д.4.
Примечания
1. Испытания рекомендуется совмещать с испытаниями по 5.8.
2. Для АС, навигационный модуль которых не позволяет изменять частоту выдачи навигационных данных, испытания проводят в соответствии с 5.13.2-5.13.5.
3. Для АС, навигационный модуль которых позволяет изменять частоту выдачи навигационных данных, испытания проводят в соответствии с 5.13.2-5.13.8 после завершения испытаний по оценке навигационных параметров по совмещенной группировке ГЛОНАСС/GPS по 5.8.
5.13.2 Подготовить АС к работе согласно РЭ. Включить АС. С помощью программного обеспечения разработчика убедиться, что модуль ГНСС настроен на прием сигналов ГНСС ГЛОНАСС и GPS. Настроить навигационный модуль на выдачу сообщений по протоколу NMEA-0183 (сообщения GGA, RMC, GGA, VTG, GSA и GSV) по [5]) с частотой 1 Гц.
Примечание - Настройка частоты выдачи навигационных сообщений навигационным модулем АС осуществляется с помощью параметра установки GNSS_DATA_RATE.
5.13.3 Включить и настроить осциллограф на прием сигналов в заданной полосе частот.
5.13.4 Подготовить имитатор к работе в соответствии с РЭ на него. Запустить СИ для движения с ускорением до максимальной скорости, установленной в эксплуатационной документации на испытываемую АС с имитацией сигналов ГНСС ГЛОНАСС и GPS (таблица В.2 (приложение В)).
5.13.5 При получении навигационного решения убедиться с помощью осциллографа, что частота выдачи данных навигационным модулем соответствует установленной.
5.13.6 Остановить СИ и в настройках навигационного модуля ГНСС (параметр настройки GNSS_DATA_RATE) установить другое значение частоты, например 2 Гц.
5.13.7 Запустить СИ и при помощи осциллографа убедиться, что частота выдачи данных соответствует установленной.
5.13.8 Повторить требования, указанные в 5.13.6 и 5.13.7, с последовательной установкой значений параметра GNSS_DATA_RATE, равными 5 и 10 Гц.
5.13.9 Результат испытаний считается положительным, если для всех образцов АС, представленных на испытания, возможна установка различных частот выдачи данных, определяемых параметром GNSS_DATA_RATE, в диапазоне значений 1, 2, 5, 10 Гц.
5.14 Проверка минимального угла возвышения (угла отсечки) навигационных космических аппаратов
5.14.1 Собрать схему в соответствии с рисунком Д.1.
5.14.2 Подготовить АС к работе согласно РЭ. Включить АС. С помощью программного обеспечения разработчика убедиться, что навигационный модуль настроен на прием сигналов ГНСС ГЛОНАСС и GPS.
5.14.3 С помощью программного обеспечения разработчика ввести значение параметра GNSS_MIN_ELEVATION (минимального угла возвышения НКА или угла отсечки), равным 5°.
5.14.4 Подготовить имитатор к работе в соответствии с РЭ на него. Для сценария имитации сигналов ГНСС ГЛОНАСС/GPS (таблица В.1) определить из числа нисходящих НКА навигационный спутник (ГЛОНАСС или GPS), для которого момент времени по достижению угла возвышения, равного 5°, будет ближайшим от момента запуска СИ. Записать указанный момент времени и условный номер навигационного спутника, которому этот момент времени соответствует.
5.14.5 Запустить сценарий имитации систем ГЛОНАСС/GPS с параметрами, приведенными в таблице В.1.
5.14.6 Наблюдать на мониторе ПК выбранный НКА и убедиться, что после прохождения момента времени он исключен из обработки (сообщение GSA). Остановить сценарий.
5.14.7 С помощью программного обеспечения разработчика ввести значение параметра GNSS_MIN_ELEVATION (минимального угла возвышения НКА или угла отсечки), равным 15°.
Повторить требования, указанные в 5.14.4-5.14.6, приняв за момент запуска СИ момент времени .
5.14.8 Результаты испытаний считать положительными, если для всех образцов АС, представленных на испытания, угол отсечки для выбранных НКА соответствует установленным (5°, 15°).
5.15 Проверка времени отключения питания навигационного модуля (навигационного приемника ГНСС) после выключения зажигания
5.15.1 Подготовить АС к работе согласно РЭ. Включить АС. С помощью программного обеспечения разработчика выйти в режим просмотра и изменения параметров настройки установочных параметров АС.
5.15.2 Проверить и записать значение параметра настройки GNSS_POWER_OFF_TIME в образце АС, представленном на испытания. Ввести новое значение параметра настройки GNSS_POWER_OFF_TIME, равное 10 с.
Примечание - Исходное значение параметра должно быть 500 мс (ГОСТ Р 54620, приложение А).
5.15.3 Выключить АС и при помощи секундомера зафиксировать фактическое время отключения АС по индикатору состояния системы.
5.15.4 Убедиться, что для всех образцов АС, представленных на испытания, зафиксированное время отключения соответствует значению, заданному в 5.16.2.
5.15.5 Порядком, изложенным в 5.15.1-5.15.2, ввести исходное значение параметра GNSS_POWER_OFF_TIME.
Примечание - Проверка по 5.15 является факультативной для штатных систем (ГОСТ Р 54620, пункт 8.1.6).
5.16 Проверка выполнения требований назначения при воздействии гармонических помех
5.16.1 Собрать схему в соответствии с рисунком Д.5.
5.16.2 Подготовить АС к работе согласно РЭ. Включить АС. С помощью программного обеспечения разработчика убедиться, что модуль ГНСС настроен на прием сигналов ГНСС ГЛОНАСС и GPS.
5.16.3 Подготовить имитатор к работе в соответствии с РЭ на него. Установить уровень мощности полезных сигналов, равным минус 161 дБВт.
5.16.4 Подготовить генератор гармонических помех к работе в соответствии с РЭ на него.
5.16.5 Повторить испытания, указанные в 5.1, 5.5, 5.7, 5.8, 5.9, 5.10, 5.11, последовательно подавая гармонические помехи в пределах пороговых значений, указанных в таблице Г.1 для проверки работы по сигналам ГЛОНАСС стандартной точности в диапазоне L1.
5.16.6 Испытания считаются успешными, если для всех образцов АС, представленных на испытания, обеспечивается выполнение требований назначения АС в режиме работы по сигналам ГЛОНАСС для всех значений гармонической помехи по таблице Г.1.
5.16.7 Повторить испытания указанные в 5.2, 5.5, 5.7, 5.8, 5.9, 5.10, 5.11, последовательно подавая гармонические помехи в пределах пороговых значений, указанных в таблице Г.2 для проверки работы по сигналам GPS.
5.16.8 Испытания считаются успешными, если для всех образцов АС, представленных на испытания, обеспечивается выполнение требований назначения АС при режиме работы по сигналам GPS для всех значений таблицы Г.2.
5.17 Проверка обеспечения слежения за сигналами ГНСС при воздействии импульсных помех
5.17.1 Собрать схему в соответствии с рисунком Д.5.
5.17.2 Подготовить АС к работе согласно РЭ. Включить АС. С помощью программного обеспечения разработчика убедиться, что модуль ГНСС настроен на прием сигналов ГНСС ГЛОНАСС и GPS.
5.17.3 Подготовить имитатор к работе в соответствии с РЭ на него. Установить уровень мощности полезных сигналов, равным минус 161 дБВт.
5.17.4 Подождать 15 мин и убедиться, что модуль ГНСС перешел в режим слежения за НКА из рабочего созвездия ГНСС.
5.17.5 Подготовить генератор импульсных помех к работе в соответствии с РЭ на него.
5.17.6 Подать импульсные помехи с заданными параметрами:
- частотный диапазон - от 1565,42 МГц до 1609,36 МГц для ГЛОНАСС/GPS;
- пороговое значение уровня сигнала помехи (пиковая мощность импульса) - минус 10 дБВт;
- длительность импульса - 1 мс;
- скважность - 10.
5.17.7 Наблюдать в течение 15 мин за появлением в диалоговом окне интерфейсной программы информации о слежении за НКА из рабочего созвездия и передачи координат ГЛОНАСС и GPS.
5.17.8 Испытания считаются успешными, если для всех образцов АС, представленных на испытания, не зафиксировано случаев срывов слежения за рабочим созвездием НКА ГЛОНАСС/GPS в период воздействия импульсной помехи.
Приложение А
(обязательное)
Форма акта отбора образцов
АКТ
отбора образцов
(наименование продукции) | |||||||||||||||||||
1 Наименование предприятия, изготовившего продукцию, его подчиненность | |||||||||||||||||||
2 Наименование организации (подразделения), где отбиралась продукция | |||||||||||||||||||
3 Наименование вида продукции | |||||||||||||||||||
(серийный выпуск или партия определенного | |||||||||||||||||||
, размер партии | |||||||||||||||||||
размера или единица продукции) | |||||||||||||||||||
4 Наименование документа, по которому изготовлена продукция | |||||||||||||||||||
5 Цель направления продукции на испытания | |||||||||||||||||||
дата | |||||||||||||||||||
6 Место отбора образцов | |||||||||||||||||||
N образцов | |||||||||||||||||||
7 Результат наружного осмотра образцов | |||||||||||||||||||
8 N документа | |||||||||||||||||||
и дата сдачи-приемки образцов в ИЛ | |||||||||||||||||||
9 Образцы отобраны методом наибольшей объективности по ГОСТ 18321 и опломбированы | |||||||||||||||||||
10 Образцы упакованы | |||||||||||||||||||
(упаковка или транспортная тара) | |||||||||||||||||||
11 Дата отправки образцов в ИЛ | |||||||||||||||||||
12 Образцы отправлены в ИЛ | |||||||||||||||||||
(нарочным, по почте и др.) | |||||||||||||||||||
Представитель заявителя | Представитель испытательной лаборатории | ||||||||||||||||||
(подпись) | (расшифровка подписи) | (подпись) | (расшифровка подписи) | ||||||||||||||||
Приложение Б
(обязательное)
Перечень средств измерений, испытательного и вспомогательного оборудования
Таблица Б.1 - Перечень средств измерения, испытательного и вспомогательного оборудования
Наименование средства испытаний | Требуемые технические характеристики средства испытаний | Рекомендуемое средство испытаний (тип) | |
Диапазон измерения | Погрешность измерений | ||
Геодезический пункт | Координаты должны быть представлены в системах геодезических параметров Земли 1990 г. (ПЗ-90) и WGS-84 | Разность координат при передаче от сети геодезических пунктов не более 0,1 м. | Геодезический пункт |
Антенна ГНСС | Диапазон рабочих частот (1570-1610) МГц; | Погрешность измерения коэффициента усиления ±2,5 дБ | Блок антенный из комплекта НАП ГНСС ГЛОНАСС/GPS "БРИЗ-МВ" 14Ц814.ТДЦК.461513.004 |
Усилитель малошумящий | Диапазон частот 950 ... 2150 МГц; | - | Усилитель малошумящий ZRL-2150+ |
Источник питания | Диапазон установки напряжения постоянного тока от 0,1 до 30 В |
| Источник питания АТН-2031 |
Имитатор сигналов ГНСС ГЛОНАСС и GPS | Число имитируемых сигналов - не менее 16 | СКО случайной составляющей основной погрешности формирования беззапросной дальности до НКА ГНСС ГЛОНАСС/GPS не более: | Имитаторы сигналов космических навигационных систем ГЛОНАСС/GPS: |
Секундомер цифровой | Максимальный объем счета - 9 ч 59 мин 59,99 с | Суточный ход при (25+5) °С не более +1,0 с. | "ИНТЕГРАЛ С-01" |
Векторный анализатор цепей | Диапазон частот 300 кГц ... 4 ГГц |
| Векторный анализатор цепей Rohde & Schwarz ZVB-4 |
Аттенюатор | Динамический диапазон (0 ... 11) дБ | ПГ±0,5 дБ | Аттенюатор HP 8494А |
Аттенюатор | Динамический диапазон (0 ... 110) дБ | ПГ±0,5 дБ | Аттенюатор HP 8496А |
Генератор сигналов | Частотный диапазон (1 ... 2) ГГц; |
| Векторные генераторы сигналов Rohde & Schwarz SMBV100A, SMB100A |
Осциллограф | Полоса пропускания не менее 2 ГГц; |
| Осциллограф Agilent Technologies DSO80204B |
Примечание - Допускается применение оборудования других типов, обеспечивающих измерение параметров в заданном диапазоне с требуемой точностью. | |||
Приложение В
(обязательное)
Основные параметры сценариев имитации навигационных сигналов ГНСС ГЛОНАСС и ГНСС GPS
Таблица В.1 - Основные параметры сценария имитации фиксированной точки пространства
Имитируемый параметр | Значение |
Продолжительность СИ, чч:мм:сс | 01:00:00 |
Местоположение АС в: | |
- СК WGS-84; | Средняя полоса России |
- ПЗ-90 | Средняя полоса России |
Параметры среды распространения НС: | |
- тропосфера; | Стандартная |
- ионосфера | Модель "Осень" |
Геометрический фактор PDOP |
|
Имитируемые сигналы | - ГНСС ГЛОНАСС (частотный диапазон L1 СТ код); |
Минимальная мощность радиосигнала: | |
- ГНСС ГЛОНАСС; | минус 161 дБВт; |
- ГНСС GPS | минус 158,5 дБВт |
Число имитируемых НКА | - не менее 8 НКА ГНСС ГЛОНАСС; |
Таблица В.2 - Основные параметры сценария имитации движения с ускорением до максимальной скорости
Имитируемый параметр | Значение |
Продолжительность СИ, чч:мм:сс | 01:00:00 |
Начальная точка АС в: | |
- CК WGS-84; | Средняя полоса России |
- ПЗ-90 | Средняя полоса России |
Модель движения АС: | |
- движение с ускорениями до максимальной скорости, км/ч | 250 |
- ускорение, g | 2 |
Параметры среды распространения навигационного сигнала: | |
- тропосфера; | Стандартная |
- ионосфера | Модель "Осень" |
Геометрический фактор PDOP |
|
Имитируемые сигналы | - ГНСС ГЛОНАСС (частотный диапазон L1 СТ код); |
Минимальная мощность радиосигнала: | |
- ГНСС ГЛОНАСС | минус 161 дБВт; |
- ГНСС GPS | минус 158,5 дБВт |
Число имитируемых НКА | - не менее 8 НКА ГНСС ГЛОНАСС; |
Таблица В.3 - Основные параметры сценария имитации движения с маневрированием
Имитируемый параметр | Значение |
Продолжительность СИ, чч:мм:сс | 02:00:00 |
Начальная точка АС в: | |
- СК WGS-84; | Средняя полоса России |
- ПЗ-90 | Средняя полоса России |
Модель движения АС: | Движение с маневрированием |
- скорость, м/с; | 10 |
- радиус поворотов, м; | 500 |
- ускорение на поворотах, м/с | 0,2 |
Параметры среды распространения НС: | |
- тропосфера; | Стандартная |
- ионосфера | Модель "Весна" |
Геометрический фактор PDOP |
|
Имитируемые сигналы | - ГНСС ГЛОНАСС (частотный диапазон L1 СТ код); |
Минимальная мощность радиосигнала: | |
- ГНСС ГЛОНАСС | минус 161 дБВт |
- ГНСС GPS | минус 158,5 дБВт |
Число имитируемых НКА | - не менее 8 НКА ГНСС ГЛОНАСС; |
Таблица В.4 - Основные параметры сценария имитации движения в местах затенения и неуверенного приема навигационных сигналов
Имитируемый параметр | Значение |
Продолжительность СИ, чч:мм:сс | 01:20:00 |
Начальная точка АС в: | |
- СК WGS-84; | Средняя полоса России |
- ПЗ-90 | Средняя полоса России |
Модель движения АС: | Движение с маневрированием |
- максимальная скорость, м/с | 10 |
Радиовидимость НС: | |
- интервалы видимости сигналов, с; | 300 |
- интервалы отсутствия сигналов, с | 600 |
Параметры среды распространения НС: | |
- тропосфера; | Стандартная |
- ионосфера | Модель "Весна" |
Геометрический фактор PDOP |
|
Имитируемые сигналы | - ГНСС ГЛОНАСС (частотный диапазон L1 СТ код); |
Минимальная мощность радиосигнала: | |
- ГНСС ГЛОНАСС | минус 161 дБВт |
- ГНСС GPS | минус 158,5 дБВт |
Число имитируемых НКА | - не менее 8 НКА ГНСС ГЛОНАСС; |
Приложение Г
(обязательное)
Пороговые значения гармонических помех навигационных сигналов ГНСС ГЛОНАСС и ГНСС GPS
Таблица Г.1 - Пороговые значения гармонических помех при работе по сигналам ГЛОНАСС СТ L1
Частота, МГц | Пороговые значения уровня помех, дБВт |
| минус 15 |
1540 | линейно уменьшающаяся от минус 15 до минус 50 |
1562 | линейно уменьшающаяся от минус 50 до минус 90 |
1583 | линейно уменьшающаяся от минус 90 до минус 140 |
1593 | минус 140 |
1609 | линейно возрастающая от минус 140 до минус 80 |
1613 | линейно возрастающая от минус 80 до минус 60 |
1626 | линейно возрастающая от минус 60 до минус 15 |
| минус 15 |
Таблица Г.2 - Пороговые значения гармонических помех при работе по сигналам GPS
Частота, МГц | Пороговые значения уровня помех, дБВт |
| минус 15 |
1525 | линейно уменьшающаяся от минус 50 до минус 140 |
1565 | минус 140 |
1585 | линейно возрастающая от минус 140 до минус 60 |
1610 | линейно возрастающая от минус 60 до минус 50 |
1626 | линейно возрастающая от минус 50 до минус 15 |
| минус 15 |
Приложение Д
(обязательное)
Схемы подключения, используемые при испытаниях
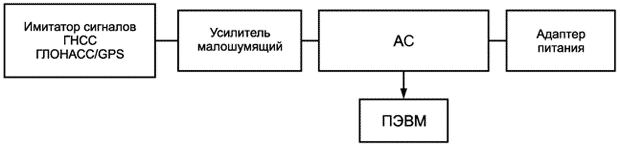
Рисунок Д.1 - Схема испытательного стенда

Рисунок Д.2 - Схема калибровки тракта
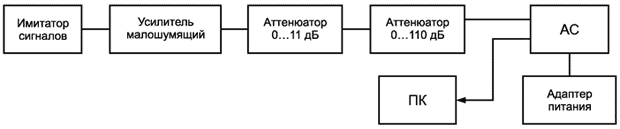
Рисунок Д.3 - Схема определения чувствительности модуля ГНСС
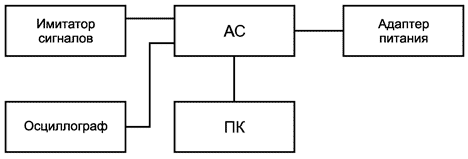
Рисунок Д.4 - Схема испытательного стенда
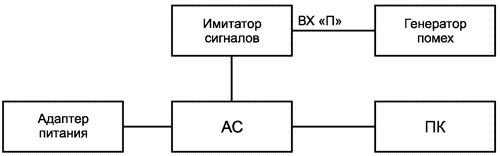
Рисунок Д.5 - Схема испытательного стенда
Примечание - ВХ "П" - радиочастотный порт имитатора сигналов для подачи сигнала внешней помехи
Библиография
[1] | Технический регламент "О безопасности колесных транспортных средств" (утвержден постановлением Правительства Российской Федерации от 10 сентября 2009 г. N 720) | |
[2] | ТР ТС 018/2011 | Технический регламент Таможенного союза "О безопасности колесных транспортных средств" |
[3] | Приказ Министерства транспорта Российской Федерации от 31 июля 2012 г. N 285 "Об утверждении требований к средствам навигации, функционирующим с использованием навигационных сигналов системы ГЛОНАСС или ГЛОНАСС/GPS, и предназначенные для обязательного оснащения транспортных средств категории М, используемых для коммерческих перевозок пассажиров, и категории N, используемых для перевозки опасных грузов" | |
[4] | ПОТРМ-016-2001 РД 153-34.0-03.150-00 | Межотраслевые правила по охране труда (правила безопасности) при эксплуатации электроустановок |
[5] | МЭК 61162-1 (2010)* | Аппаратура и системы морской навигации и радиосвязи. Цифровые интерфейсы. Часть 1. Передача от одного источника на несколько приемников (Maritime navigation and radio communication equipment and systems - Digital interfaces - Part 1: Single talker and multiple listeners) |
________________ * Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - . | ||
Электронный текст документа
и сверен по:
, 2014
{kind=link}