ГОСТ Р ИСО 15367-2-2012
Группа Т35
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ЛАЗЕРЫ И ЛАЗЕРНЫЕ УСТАНОВКИ (СИСТЕМЫ). МЕТОДЫ ИЗМЕРЕНИЙ ФОРМЫ ВОЛНОВОГО ФРОНТА ПУЧКА ЛАЗЕРНОГО ИЗЛУЧЕНИЯ
Часть 2
Датчики Шока-Гартмана
Laser and laser-related equipment. Test methods for determination of the shape of a laser beam wavefront. Part 2. Shack-Hartmann sensors
ОКС 31.260
Дата введения 2013-07-01
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. N 184-ФЗ "О техническом регулировании", а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 "Стандартизация в Российской Федерации. Основные положения"
Сведения о стандарте
1 ПОДГОТОВЛЕН Федеральным государственным унитарным предприятием "Всероссийский научно-исследовательский институт оптико-физических измерений" (ФГУП "ВНИИОФИ") на основе собственного аутентичного перевода на русский язык международного стандарта, указанного в пункте 4
2 ВНЕСЕН Управлением метрологии Федерального агентства по техническому регулированию и метрологии
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 12 июля 2012 г. N 179-ст*
________________
* Вероятно, ошибка оригинала. Следует читать Приказом Федерального агентства по техническому регулированию и метрологии от 12 июля 2012 г. N 189-ст. - .
4 Настоящий стандарт идентичен международному стандарту ИСО 15367-2:2005* "Лазеры и лазерные установки (системы). Методы измерений формы волнового фронта пучка лазерного излучения. Часть 2. Датчики Шока-Гартмана" (ISO 15367-2:2005 "Laser and laser-related equipment - Test methods for determination of the shape of a laser beam wavefront - Part 2: Shack-Hartmann sensors").
________________
* Документ в информационных продуктах не содержится. За информацией о документе Вы можете обратиться в Службу поддержки пользователей. - .
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты Российской Федерации, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячно издаваемом информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
Предисловие к международному стандарту ИСО 15367-2:2005 "Лазеры и лазерные установки (системы). Методы измерений формы волнового фронта пучка лазерного излучения. Часть 2. Датчики Шока-Гартмана"
ИСО (Международная организация по стандартизации) - всемирная федерация национальных органов по стандартизации (членов ассоциации). Разработку международных стандартов, как правило, проводят технические комитеты. Каждый член ассоциации, заинтересованный в тематике, закрепленной за данным техническим комитетом, имеет право быть представленным в этом комитете. Международные правительственные и неправительственные организации, связанные с ИСО, также принимают участие в работе. ИСО тесно сотрудничает с Международной электротехнической комиссией (МЭК) по всем вопросам стандартизации в области электротехники.
Проекты международных стандартов разрабатывают в соответствии с правилами, изложенными в Директивах ИСО/МЭК, часть 2.
Проекты международных стандартов, принятые техническими комитетами, рассылают членам ассоциации для голосования. Публикация проекта в качестве международного стандарта требует одобрения по крайней мере 75% членов ассоциации, принявших участие в голосовании.
Некоторые положения данного стандарта могут быть предметом патентования. ИСО не несет ответственности за признание какого-либо или всех патентных прав.
Международный стандарт ИСО 15367-2 подготовлен подкомитетом ПК 9 "Электрооптические системы" технического комитета ИСО/ТК 172 "Оптика и фотоника".
Стандарты серии ИСО 15367 под групповым заголовком "Лазеры и лазерные установки (системы). Методы измерений формы волнового фронта пучка лазерного излучения", общим для всех стандартов указанной серии, состоят из следующих частей:
- часть 1. Терминология и основные положения;
- часть 2. Датчики Шока-Гартмана.
Введение к международному стандарту ИСО 15367-2:2005 "Лазеры и лазерные установки (системы). Методы измерений формы волнового фронта пучка лазерного излучения. Часть 2. Датчики Шока-Гартмана"
Знание характеристик процесса распространения пучка лазерного излучения необходимо как при разработке и совершенствовании лазерных систем, так и в сфере промышленного использования лазеров.
Известны четыре группы параметров, характеризующих процесс распространения пучка лазерного излучения:
- распределение плотности мощности (энергии) (ИСО 13694);
- ширины, углы расходимости и коэффициенты распространения пучка (ИСО 11146-1 и ИСО 11146-2);
- распределение волнового фронта (фазы) (ИСО 15367-1 и настоящая часть ИСО 15367);
- пространственная когерентность пучка (пока не стандартизована).
В принципе полное описание процесса требует знания функции взаимной когерентности или функции спектральной плотности по крайней мере в одном поперечном сечении пучка. Несмотря на то, что определение этих распределений может быть выполнено, затраты на проведение подобных экспериментов достаточно велики, а промышленные средства измерений этих величин пока недоступны. Таким образом, настоящая часть ИСО 15367 не распространяется на универсальные способы описания пучка, а лишь ограничена рекомендациями по измерению волнового фронта, что эквивалентно распределению фазы для пучков, обладающих пространственной когерентностью. Следовательно, достаточная точность прогнозирования распространения пучка достижима только в ограниченном случае высокой степени пространственной когерентности.
Разнообразные средства измерений градиента фазы или волнового фронта пригодны для определения распределений волнового фронта или фазы. К таким средствам измерений, в том числе, относятся интерферометры поперечного сдвига, Гартмана и Шока-Гартмана датчики волнового фронта, а также муаровый дефлектометр. С помощью этих средств измерений определяют градиенты волнового фронта или фазы, а по полученным данным реконструируют двухразмерное (двухкоординатное) фазовое распределение.
В ИСО 15367-2 рассмотрены только датчики волнового фронта Гартмана и Шока-Гартмана, поскольку при их использовании могут быть проведены измерения волновых фронтов пучков как полностью, так и частично когерентного лазерного излучения. Значительное число таких датчиков освоено промышленностью.
Основные достоинства датчиков Гартмана:
- широкий динамический диапазон;
- высокая оптическая эффективность;
- возможность выполнения измерений в пучках с частичной когерентностью;
- отсутствие требований спектральной чистоты;
- отсутствие неопределенности при приращениях фазы в 2;
- возможность получения и анализа волнового фронта по результатам одного измерения.
Средства прямых измерений фазы или волнового фронта типа самокалибруемых интерферометров находятся вне области применения ИСО 15367-2.
Введение к национальному стандарту Российской Федерации ГОСТ Р ИСО 15367-2-2012 "Лазеры и лазерные установки (системы). Методы измерений формы волнового фронта пучка лазерного излучения. Часть 2. Датчики Шока-Гартмана"
Настоящий стандарт подготовлен в целях прямого применения в Российской Федерации международного стандарта ИСО 15367-2:2005 "Лазеры и лазерные установки (системы). Методы измерений формы волнового фронта пучка лазерного излучения. Часть 2. Датчики Шока-Гартмана" как основополагающего нормативного документа, требования которого должны быть учтены при изготовлении и поставке на экспорт объекта стандартизации по договорам (контрактам).
ГОСТ Р ИСО 15367-2-2012 представляет собой полный аутентичный текст ИСО 15267-2:2005.
1 Область применения
Настоящий стандарт распространяется на методики измерений и оценки функции распределения волнового фронта в поперечном сечении лазерного пучка с использованием датчиков Гартмана и Шока-Гартмана. Положения настоящего стандарта распространяются на астигматические пучки когерентного и частично когерентного непрерывного и импульсного лазерного излучения.
Кроме того, описаны надежные численные методы зональной и модальной реконструкций двухразмерного (двухкоординатного) распределения волнового фронта с учетом неопределенности измерений.
Данные, описывающие распределение волнового фронта, позволяют определять ряд его параметров, которые приведены в ИСО 15367-1.
2 Нормативные ссылки
Следующие нормативные документы* необходимы для применения настоящего стандарта. Для датированных ссылок следует применять только указанные издания. Для ссылок без даты следует применять последнее издание документа (включая любые поправки).
____________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ИСО 11145 Оптика и оптические приборы. Лазеры и относящееся к лазерам оборудование. Словарь и обозначения (ISO 11145, Optics and photonics - Lasers and laser-related equipment - Vocabulary and symbols)
ИСО 13694 Оптика и оптические приборы. Лазеры и лазерные установки (системы). Методы измерений распределения плотности мощности (энергии) лазерного пучка (ISO 13694, Optics and optical instruments - Lasers and laser-related equipment - Test methods for laser beam power (energy) density distribution)
ИСО 15367-1:2003 Лазеры и лазерные установки (системы). Методы измерений формы волнового фронта пучка лазерного излучения. Часть 1. Терминология и основные положения (ISO 15367-1:2003, Laser and laser-related equipment - Test methods for determination of the shape of a laser beam wavefront - Part 1: Terminology and fundamental aspects)
3 Термины и определения
В настоящем стандарте применены термины по ИСО 11145, ИСО 15367-1, а также следующие термины с соответствующими определениями:
3.1 расстояния между элементами матрицы (array element spacing); ,
: Расстояния между центрами соседних пинхолов или микролинз в направлениях осей
и
.
3.2 расстояние между экраном с субапертурами и матричным приемником излучения (sub-aperture screen to detector spacing); : Расстояние между экраном с субапертурами (матрица микролинз или экран Гартмана) и матричным приемником излучения.
Примечание - В датчиках Шока-Гартмана указанное расстояние часто равно фокусному расстоянию микролинзы.
3.3 фокусное расстояние микролинзы (lenslet focal length); : Фокусное расстояние микролинз в датчике Шока-Гартмана.
3.4 ширина субапертуры (sub-aperture width); : Ширина апертуры пинхолов в экране Гартмана или микролинз в датчике Шока-Гартмана, соответственно.
3.5 угловой динамический диапазон (angular dynamic range); : Максимально используемый угловой диапазон (угол поля зрения) датчиков Гартмана или Шока-Гартмана.
Примечание - Для квадратных апертур угловой динамический диапазон описывает выражение:
![]() .
.
3.6 воспроизводимость результатов измерений волнового фронта (wavefront measurement repeatability); ![]() *: Среднее квадратическое значение разности между одиночными последовательными результатами измерений
*: Среднее квадратическое значение разности между одиночными последовательными результатами измерений ![]() одного и того же волнового фронта и усредненным волновым фронтом
одного и того же волнового фронта и усредненным волновым фронтом ![]() :
:
_______________
* В соответствии с практикой, сложившейся в Российской Федерации, ![]() корректней называть сходимостью результатов измерений.
корректней называть сходимостью результатов измерений.
 ,
,
где - номер измерения;
- число измерений;
 .
.
3.7 погрешность измерений волнового фронта (wavefront measurement accuracy); ![]() : Усредненное среднее квадратическое значение разности между референтным (опорным) волновым фронтом
: Усредненное среднее квадратическое значение разности между референтным (опорным) волновым фронтом и корректированным по углу наклона волновым фронтом
после серии различных углов наклона
референтного (опорного) фронта:
 ,
,
где - номер измерения волнового фронта с углами наклона
и
;
- число измерений;
- скорректированный по углу наклона волновой фронт:
![]() .
.
Примечание - См. также ИСО 15367-1:2003 (пункт 3.4.7).
4 Обозначения и единицы измерений
Таблица 1 - Обозначения и единицы измерений
Обозначение | Параметр | Единица измерений | Источник, в котором приведено определение |
| Распределение плотности мощности (энергии) | Вт/см | ИСО 13694 |
| Механические оси (декартовы координаты) | мм | ИСО 15367-1:2003 (пункт 3.1.5) |
Ось пучка | мм | ИСО 15367-1:2003 (пункт 3.1.5) | |
Длина волны | нм | - | |
Местоположение (координата) плоскости измерений | мм | ИСО 15367-1:2003 (пункт 3.1.4) | |
| Усредненная форма волнового фронта | нм | ИСО 15367-1:2003 (пункт 3.1.1) |
| Распределение фазы | рад | ИСО 15367-1:2003 (примечание 1 к пункту 3.1.1) |
| Скорректированный волновой фронт | нм | ИСО 15367-1:2003 (пункт 3.4.2) |
| Аппроксимирующая сферическая поверхность | - | ИСО 15367-1:2003 (пункт 3.4.3) |
Расфокусировка или радиус наилучшей сферы | мм | ИСО 15367-1:2003 (пункт 3.4.5) | |
| Функция аберраций волнового фронта | нм | ИСО 15367-1:2003 (пункт 3.4.6) |
Нерегулярность волнового фронта | нм | ||
Взвешенная средняя квадратическая деформация | нм | ИСО 15367-1:2003 (пункт 3.4.7) | |
| Расстояния между элементами матрицы | мм | 3.1 |
Расстояние между экраном с субапертурами и матричным приемником излучения | мм | 3.2 | |
Фокусное расстояние микролинз | мм | 3.3 | |
Размер пятна | мкм | ||
Ширина субапертуры | мкм | 3.4 | |
Угловой динамический диапазон | мрад | 3.5 | |
| Координаты центроида в субапертуре | мм | ИСО 11146-1 |
| Референтные (опорные) координаты пучка в субапертуре | мм | |
| Локальные компоненты градиента волнового фронта | - | ИСО 15367-1:2003 (пункты 3.5.1, 3.5.3) |
| Воспроизводимость результатов измерений волнового фронта | нм | 3.6 |
| Погрешность измерений волнового фронта | нм | 3.7 |
Геометрическая матрица алгоритма реконструкции волнового фронта | - | ||
Ковариантная матрица | - |
5 Принцип измерений волнового фронта датчиками Гартмана и Шока-Гартмана
Принцип измерений волнового фронта Гартмана основан на разделении основного пучка на определенное число "микропучков" с помощью непрозрачного экрана с регулярной сеткой пинхолов (датчик Гартмана) либо регулярной матрицы микролинз (датчик Шока-Гартмана), приводящим к дискретизации градиента усредненного волнового фронта (см. рисунок 1) и повышению эффективности сбора излучения.
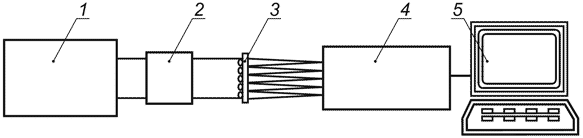
1 - лазер; 2 - ослабитель излучения; 3 - матрица микролинз; 4 - местоположение приемника излучения; 5 - устройство сбора и обработки данных
Рисунок 1 - Структурная схема установки для измерений волнового фронта с использованием датчика Шока-Гартмана
Распределение плотности мощности (энергии) за матрицей воспринимается и преобразуется в электрические сигналы позиционно-чувствительным приемником излучения [чаще всего прибором с зарядовой связью (далее - ПЗС) - ПЗС-матрицей или матрицей квадратурных приемников]. Выходные сигналы приемников матрицы регистрируются и обрабатываются устройством сбора и обработки данных.
Для каждой субапертуры, т.е. пинхола или микролинзы, под воздействием как измеряемого, так и референтного (опорного) пучков (желательно, чтобы последний был коллимированным) определяют местоположение центроида. Смещения центроидов измеряемого пучка относительно центроидов референтного (опорного) пучка отображают локальные градиенты волнового фронта, по которым непосредственным интегрированием или путем модальной аппроксимации реконструируется волновой фронт ![]() (см. раздел 8).
(см. раздел 8).
Тип, наименование производителя и идентификатор модели средства измерений, основанного на датчике Гартмана или Шока-Гартмана, так же, как размеры матрицы и расстояния между пинхолами/микролинзами, должны быть внесены в протокол измерений.
6 Измерительная установка и методика измерений
6.1 Общие сведения
Основные сведения, касающиеся различных типов лазеров, безопасности работы с лазерным излучением, окружающей среды, формирования пучка и управления пучком, оптической системой и ее элементами, общих требований к приемникам излучения при измерениях градиента фазы, приведены в ИСО 15367-1.
Все детали, характеризующие процессы дискретизации (деления) и ослабления пучка, должны быть отражены в протоколе измерений.
6.2 Приемно-усилительное устройство
Предназначенное для измерений волнового фронта по Гартману и Шоку-Гартману приемно-усилительное устройство должно состоять из двух частей:
a) устройства деления измеряемого излучения на пучок лучей, представляющего собой субапертурный экран [например, матрицу преломляющих или дифракционных микролинз (датчик Шока-Гартмана) или пинхолов (датчик Гартмана)];
b) позиционно-чувствительного устройства (ПЗС-приемника и камеры), расположенного на расстоянии за устройством деления излучения (
может быть равным
в случае применения датчика Шока-Гартмана; не исключена также возможность корректировки этого расстояния).
Чувствительная поверхность матричного приемника излучения должна быть поделена на субапертуры соответственно субапертурам устройства деления излучения. Как правило, в качестве устройства по перечислению а) применяют ортогональную матрицу микролинз/пинхолов с фиксированными расстояниями между ее элементами ,
(соответственно в
- и
-направлениях). В этом случае чувствительная поверхность приемника излучения должна быть поделена на
![]() прямоугольных субапертур с расстояниями между их центрами
прямоугольных субапертур с расстояниями между их центрами ,
, обозначаемыми как (
).
Угловой динамический диапазон датчика непосредственно зависит от соотношения размеров пятна на чувствительной поверхности приемника излучения и субапертуры экрана с микролинзами/пинхолами. Во избежание перезаполнения излучением и наложения пучков размер пятна должен быть меньше размера субапертуры. Соответственно локальному градиенту волнового фронта проецируемое на поверхность приемника изображение субапертуры экрана (пятно) сдвигается к границе соответствующей зоны чувствительной поверхности приемника. При пересечении пятном границы зоны его местоположение не следует учитывать при обработке результатов измерений. Этот эффект ограничивает угловой динамический диапазон датчика.
Размер пятна датчика Шока-Гартмана описывает приближенное выражение:
![]() , (1)
, (1)
где - фокусное расстояние микролинзы;
- ширина стороны квадратной апертуры микролинзы.
При этом предполагают, что ![]() . Смещение пятна
. Смещение пятна , вызываемое локальным градиентом волнового фронта
в соответствующей ему субапертуре, определяют по формуле
![]() . (2)
. (2)
Максимально допускаемое смещение пятна ![]() до пересечения им границы зоны определяют по формуле
до пересечения им границы зоны определяют по формуле
![]() , (3)
, (3)
а соответствующий максимальный горизонтальный градиент волнового фронта - по формуле
![]() . (4)
. (4)
Если размер апертуры микролинзы равен расстоянию между элементами матрицы
, то
![]() . (5)
. (5)
Таким образом, во избежание перекрытия пятнами друг друга необходимо, чтобы фокусное расстояние микролинзы было меньше ![]() . Для достижения приемлемого динамического диапазона при минимальных перекрестных искажениях для фокусного расстояния должно быть выполнено неравенство:
. Для достижения приемлемого динамического диапазона при минимальных перекрестных искажениях для фокусного расстояния должно быть выполнено неравенство:
![]() .
.
Дальнейшее уменьшение фокусного расстояния позволяет расширить угловой динамический диапазон, но при этом возможно возрастание неопределенности измерений. Для вертикального направления справедливы все вышеприведенные соотношения.
В случае круглой апертуры микролинзы с диаметром максимальный градиент волнового фронта описывает выражение:
![]() . (6)
. (6)
Если размер апертуры микролинзы равен расстоянию между элементами
, то максимальный горизонтальный градиент волнового фронта определяют по формуле
![]() (7)
(7)
и, следовательно, для получения приемлемого динамического диапазона фокусное расстояние должно быть менее ![]() .
.
У датчиков Гартмана размер пятна приблизительно равен:
![]() , (8)
, (8)
где - ширина стороны квадратной апертуры экрана;
- расстояние между экраном и чувствительной поверхностью приемника излучения.
Приближенное выражение (8) справедливо только при ![]() .
.
Смещение пятна , вызываемое локальным горизонтальным градиентом волнового фронта
в соответствующей субапертуре, описывает выражение
![]() , (9)
, (9)
а максимальный горизонтальный градиент волнового фронта - выражение
![]() . (10)
. (10)
Следовательно, во избежание перекрытия пятнами друг друга отношение должно быть менее ![]() . Для достижения приемлемого динамического диапазона при минимальных перекрестных искажениях отношение
. Для достижения приемлемого динамического диапазона при минимальных перекрестных искажениях отношение ![]() должно быть менее
должно быть менее ![]() . Дальнейшее уменьшение этого отношения позволяет расширить угловой динамический диапазон, но при этом возможно возрастание неопределенности измерений. Для вертикального направления справедливы все вышеприведенные соотношения.
. Дальнейшее уменьшение этого отношения позволяет расширить угловой динамический диапазон, но при этом возможно возрастание неопределенности измерений. Для вертикального направления справедливы все вышеприведенные соотношения.
В случае круглой апертуры в экране диаметром максимальный градиент волнового фронта определяют по формуле
![]() . (11)
. (11)
Следовательно, для достижения приемлемого динамического диапазона отношение ![]() должно быть менее
должно быть менее ![]() .
.
Примечание - Динамический диапазон может быть дополнительно расширен при использовании ряда алгоритмов обработки изображений.
Неопределенность измерений зависит от отношения сигнал - шум приемника излучения и числа его элементов, охватываемых пятнами. В частности, неопределенность напрямую связана с параметрами как приемника излучения (размер элемента и отношение сигнал - шум), так и экрана (расстояние до чувствительной поверхности приемника, расстояние между элементами, размер субапертуры, а для датчиков Шока-Гартмана еще и фокусное расстояние). Для обеспечения высокоточных измерений необходимо, чтобы формируемые микролинзами/пинхолами пятна освещали/облучали по крайней мере по два элемента приемника в каждом направлении.
Динамический диапазон преобразования приемником излучения плотности мощности/энергии излучения должен быть не менее 100:1, а его пространственное разрешение - по крайней мере вдвое более ,
.
6.3 Измерения
6.3.1 Юстировка
Пучок лазерного излучения и оптическая система должны быть съюстированы коаксиально средству измерений фазы, расположенному в сечении пучка с координатой .
6.3.2 Установка субапертур
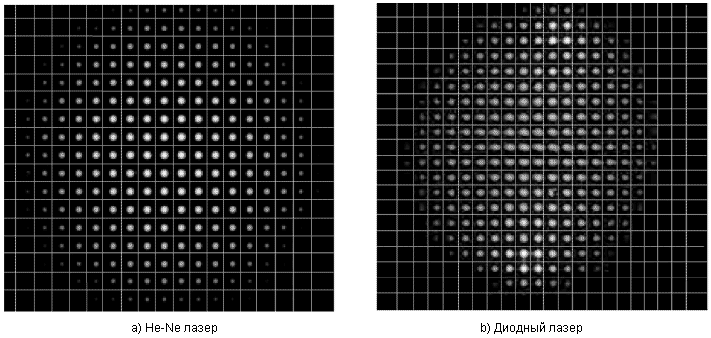
При регулировке и контроле распределения пятен, формируемых матрицей микролинз или пинхолов, на чувствительной поверхности приемника излучения должно быть установлено, что они центрированы относительно сетки (матрицы) приемника. В принципе, в каждую зону (ячейку сетки или элемент матрицы приемника) должно быть вписано только одно пятно (рисунок 2). Центрирование распределения пятен достигают поперечным смещением сетки приемника либо наклоном всего приемника излучения.
На рисунке изображены субапертурные сетки приемника излучения.
Рисунок 2 - Распределения пятен, полученные с помощью датчика Шока-Гартмана при падении на него излучения He-Ne лазера (слева) и диодного лазера (справа)
При сильных искажениях волнового фронта пятна могут перекрываться или развертываться вдоль соответствующих им субапертур, что искажает результаты измерений волнового фронта. Во избежание этого явления следует масштабировать сетку субапертур.
Распределение пятен ![]() [
[![]() - для импульсного излучения] должно быть зарегистрировано и сохранено в электронной системе обработки данных. Примеры измеренных распределений показаны на рисунке 2.
- для импульсного излучения] должно быть зарегистрировано и сохранено в электронной системе обработки данных. Примеры измеренных распределений показаны на рисунке 2.
6.4 Калибровка
Порядок калибровки применяемых датчиков Гартмана и Шока-Гартмана следующий:
Расстояние должно быть определено путем применения средства линейных измерений либо по результатам измерений известного волнового фронта. Способ калибровки следует указать в протоколе измерений.
Должен быть зарегистрирован в качестве референтного (опорного) сферический или плоский волновой фронт. Характеристики и способ формирования такого волнового фронта следует описать в протоколе измерений.
Референтное (опорное) распределение пятен ![]() [
[![]() - для импульсного излучения] должно быть сформировано и воспринято датчиком так, как описано в 6.2, и сохранено в электронной системе обработки данных (см. рисунок 3).
- для импульсного излучения] должно быть сформировано и воспринято датчиком так, как описано в 6.2, и сохранено в электронной системе обработки данных (см. рисунок 3).
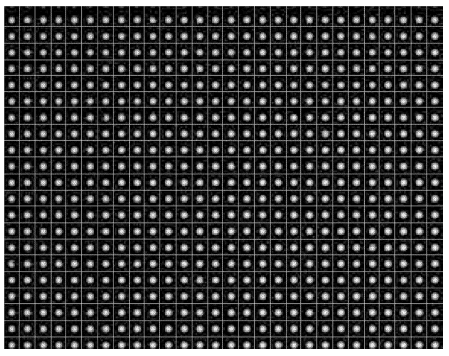
Рисунок 3 - Референтное (опорное) распределение пятен (источник - коллимированный пучок излучения He-Ne лазера), полученное с помощью датчика Шока-Гартмана с соответствующей субапертурной сеткой
При калибровке датчика Шока-Гартмана важно использовать референтный (опорный) пучок идентичной рабочей длины волны, так как аберрации матрицы микролинз могут привести к порожденным дисперсией смещениям фокальных точек. Следует избегать возникновения подобных эффектов.
Референтный (опорный) и сигнальный пучки могут быть наложены друг на друга и одновременно зарегистрированы, что позволяет скорректировать влияние динамической разъюстировки. При этом электронная схема приемно-усилительного устройства должна разделять сигналы, образуемые двумя пучками, путем модуляции референтного (опорного) пучка.
Тип и длина волны коллимированного пучка, используемого при калибровке, должны быть указаны в протоколе измерений.
7 Оценка градиентов волнового фронта
7.1 Вычитание фона
Перед началом процедуры оценки волнового фронта измеренное распределение пятен ![]() [
[![]() ] должно быть скорректировано для устранения влияния фона и шумов. Для этого применимы положения ИСО 13694, предусматривающие построение карты фона либо вычитание усредненного фона, а также ограничение полученного распределения определенным порогом плотности мощности (энергии)
] должно быть скорректировано для устранения влияния фона и шумов. Для этого применимы положения ИСО 13694, предусматривающие построение карты фона либо вычитание усредненного фона, а также ограничение полученного распределения определенным порогом плотности мощности (энергии) ![]() .
.
Для обычных применений процедура ограничения обеспечивает надлежащую коррекцию фона. Значение выбирают таким, чтобы
или
превышал положительные пики шума приемника излучения. Если профиль распределения пятен, сформированный матрицей микролинз/пинхолов, свидетельствует о появлении структуры этого распределения в крыльях за пределами матрицы или по ее контуру (что часто объяснимо влиянием дифракции пучков, вызываемой микролинзами), необходимо применить большие пороги для компенсации взаимных влияний соседних субапертур.
Примененная методика коррекции и выбранные значения ![]() должны быть указаны в протоколе измерений.
должны быть указаны в протоколе измерений.
7.2 Оценка
Оценка волнового фронта по скорректированному (т.е. после устранения влияния фона) распределению пятен ![]() сводится к определению координат центроида каждого пятна в субапертуре, т.е. момента первого порядка для соответствующего пятна (
сводится к определению координат центроида каждого пятна в субапертуре, т.е. момента первого порядка для соответствующего пятна () в субапертуре:
 и
и  . (12)
. (12)
Полученные координаты пятен ![]() вносят в запоминающее устройство. Аналогична процедура обработки распределений пятен
вносят в запоминающее устройство. Аналогична процедура обработки распределений пятен ![]() [
[![]() ] для референтного (опорного) излучения.
] для референтного (опорного) излучения.
Локальные градиенты волнового фронта ![]() определяют по координатам центроидов пятен измеряемого излучения
определяют по координатам центроидов пятен измеряемого излучения ![]() относительно аналогичных координат центроидов пятен референтного (опорного) пучка
относительно аналогичных координат центроидов пятен референтного (опорного) пучка ![]() по формуле
по формуле
 . (13)
. (13)
Примечание - Для получения высокой точности определения (оценки) волнового фронта может быть необходима корректировка местоположений центроидов с учетом систематического тренда плотности мощности (энергии) в пределах площади каждой субапертуры (см. раздел 9). То же самое относится к датчику Шока-Гартмана, в случае неточного соблюдения равенства ![]() .
.
8 Реконструкция волнового фронта
8.1 Общие положения
Полученное соотношение (13) позволяет реконструировать волновой фронт ![]() несколькими численными методами. Наиболее применяемое непосредственное (прямое) численное интегрирование (зональный метод), матричные итерации и модальные способы подгонки.
несколькими численными методами. Наиболее применяемое непосредственное (прямое) численное интегрирование (зональный метод), матричные итерации и модальные способы подгонки.
Способ, используемый для реконструкции волнового фронта, включая соответствующие параметры и степень подгонки, должен быть указан в протоколе измерений.
8.2 Прямое численное интегрирование (зональный метод)
С помощью подходящей схемы дифференцирования градиенты волнового фронта ![]() местоположении (
местоположении (,
) должны быть аппроксимированы. Наиболее подходящая схема дифференцирования, зависящая от предполагаемого применения датчика, должна быть указана в протоколе измерений. Некоторые подходы описаны в приложении А (подраздел А.1).
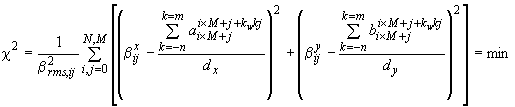
Как правило, набор наклонов волнового фронта выглядит противоречивым
![]()
и представление отдельной поверхностью возможно только с использованием метода наименьших квадратов.
Метод наименьших квадратов приводит к нормальным уравнениям:
![]() , (14)
, (14)
где ![]() - вектор волнового фронта;
- вектор волнового фронта;
![]() -
- ![]() вектор градиента волнового фронта;
вектор градиента волнового фронта;
- геометрическая матрица [приложение А (подраздел А.2)];
- шумовая матрица ковариации.
Для некоррелированного шума становится диагональной, представляя случайную погрешность измерений
, определяемую как величину, обратную корню квадратному из распределения плотности мощности/энергии.
Данные градиента определяют ![]() , только если он не постоянный. Таким образом, выражение
, только если он не постоянный. Таким образом, выражение ![]() становится сингулярным и стандартным линейным уравнением, решение которого не может быть получено непосредственно. Рекомендованная методика решения уравнения (14) использует сингулярное разложение величин (SVD) матрицы
становится сингулярным и стандартным линейным уравнением, решение которого не может быть получено непосредственно. Рекомендованная методика решения уравнения (14) использует сингулярное разложение величин (SVD) матрицы .
Матрица зависит только от геометрии совокупности микролинз/пинхолов и используемой схемы дифференцирования, т.е. для постоянных условий сингулярное разложение величин должно быть выполнено только один раз и тогда последующие реконструкции волнового фронта могут быть проведены более эффективно. Вместе с тем матричные итерации могут быть применены для прямого определения вектора волнового фронта, что исключает необходимость сингулярного разложения величин и предоставляет возможность взвешивания результатов измерений с использованием соответствующих значений облученности.
8.3 Модальная реконструкция волнового фронта
Модальное представление описывает волновой фронт расширенными полиномами:
![]() , (15)
, (15)
где - коэффициенты;
- базисные функции полинома.
Наиболее общие наборы базисов - полиномы Цернике (приложение В) для циркулярных датчиков и полиномы Лежандра, Эрмита или Чебышева для датчика прямоугольной формы, соответственно. Для специальных конфигураций могут быть полезны различные наборы. Члены функции должны быть линейно независимы, но не неизбежно ортогональны. Прикладной набор базисов должен быть указан в протоколе измерений.
Локальные градиенты волнового фронта аппроксимируют следующим образом:
 и
и 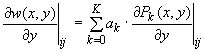 . (16)
. (16)
Коэффициенты должны быть определены методом наименьших квадратов, что приводит к набору нормальных уравнений:
![]() , (17)
, (17)
где ![]() и выражение для
и выражение для приведено в приложении А (подраздел А.2).
Решение уравнения (17) может быть затруднено, если возникает подвыборка, т.е. число способов, соответствующих полученным данным, превышает число измеряемых точек. Тогда более высокий подкласс способов может исказить решение и вызвать совмещение волнового фронта. В этих случаях должно быть выбрано большее число точек данных или номеров, и форма полинома должна быть исследована очень тщательно.
9 Представление волнового фронта
Из восстановленного волнового фронта ![]() должны быть вычтены средние значения наклона и вершины, что приводит к скорректированному волновому фронту
должны быть вычтены средние значения наклона и вершины, что приводит к скорректированному волновому фронту ![]() [см. ИСО 15367-1:2003 (пункт 3.4.2)]. Скорректированный волновой фронт или связанное с ним распределение фазы
[см. ИСО 15367-1:2003 (пункт 3.4.2)]. Скорректированный волновой фронт или связанное с ним распределение фазы ![]() должны быть представлены в протоколе измерений или в виде таблицы данных, векторной диаграммы, трехмерного распределения, участков контура, или в виде интерферограммы (см. рисунок 4).
должны быть представлены в протоколе измерений или в виде таблицы данных, векторной диаграммы, трехмерного распределения, участков контура, или в виде интерферограммы (см. рисунок 4).
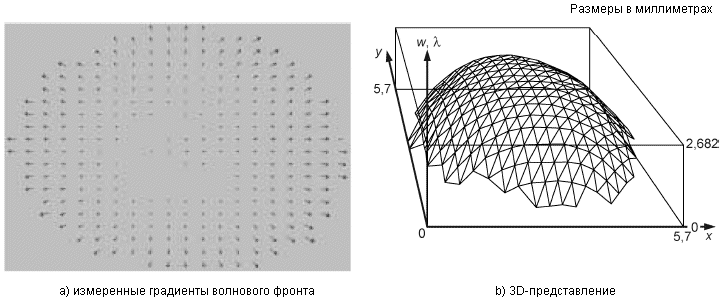
Рисунок 4 - Примеры, иллюстрирующие векторную диаграмму измеренных градиентов волнового фронта и 3D-представление реконструированного и скорректированного волнового фронта ![]() излучения диодного лазера (
излучения диодного лазера (650 нм), полученных с помощью датчика Шока-Гартмана
В случаях, когда фокусировка измеряемого лазерного пучка важна, аппроксимирующая сферическая поверхность ![]() [см. ИСО 15367-1 (пункт 3.4.3)] должна быть дополнительно вычтена из
[см. ИСО 15367-1 (пункт 3.4.3)] должна быть дополнительно вычтена из ![]() в целях визуализации функции искажений волнового фронта
в целях визуализации функции искажений волнового фронта ![]() (см. рисунок 5).
(см. рисунок 5).
Размеры в миллиметрах
Вдоль вертикальной оси расположены нерегулярности волнового фронта типа пик-впадина
Рисунок 5 - Пример, иллюстрирующий 3D-представление функции ![]() искажений волнового фронта излучения фемтосекундного эксимерного лазера (
искажений волнового фронта излучения фемтосекундного эксимерного лазера (248 нм), полученной с помощью датчика Гартмана
10 Неопределенность
10.1 Общие сведения
Общие сведения, касающиеся источников, требований к оценке и документирования неопределенности измерений волнового фронта, содержатся в ИСО 15367-1. В 10.2 и 10.5 рассмотрены только источники неопределенности, относящиеся к датчикам Шока-Гартмана.
10.2 Случайные погрешности измерений
Случайные погрешности измерений вызваны главным образом кратковременными флуктуациями измеряемого излучения и шумами приемника излучения. Дисперсия волнового фронта может быть вычислена стандартными методами оценки погрешности по распределениям плотности мощности (энергии), использованным для оценки волнового фронта. При выполнении условия стационарности лазерного излучения статистические флуктуации могут быть уменьшены удлинением периода дискретизации либо увеличением числа повторных измерений.
Существуют два главных источника статистической неопределенности:
a) шум или чисто стохастические явления (эффекты), которые для данной субапертуры могут быть сведены к нулю путем усреднения;
b) смещение или систематические явления (эффекты), которые приводят к неправильному результату измерений для данной субапертуры.
Первый источник ухудшает прецизионность (precision) измерений, а второй - точность (accuracy) получаемого результата*. Ограниченное число элементов приемника излучения, используемых для измерений местоположений пятен, приводит к существенному различию влияний этих источников при использовании датчиков Шока-Гартмана.
_______________
* В отечественной терминологии источник а) - неопределенность типа А (или случайная погрешность), а источник b) - неопределенность типа В (или систематическая погрешность).
Воспроизводимость результатов измерений волнового фронта ![]() может быть в соответствии с 3.6 определена как усредненная средняя квадратическая разность между результатом одного измерения и средним значением для того же волнового фронта. Интервал
может быть в соответствии с 3.6 определена как усредненная средняя квадратическая разность между результатом одного измерения и средним значением для того же волнового фронта. Интервал между измерениями должен быть выбран таким, чтобы долговременными дрейфами приемника излучения, лазера и фона можно было пренебречь. Отсчетов должно быть не менее 10. Для обеспечения удовлетворительной воспроизводимости результатов измерений следует использовать излучение со сферическим или плоским фронтом.
Погрешность измерений волнового фронта ![]() может быть определена в соответствии с 3.7 как усредненная средняя квадратическая разность между референтным (опорным) волновым фронтом
может быть определена в соответствии с 3.7 как усредненная средняя квадратическая разность между референтным (опорным) волновым фронтом и скорректированным по наклону волновым фронтом
после того, как заранее известный наклон
был придан референтному (опорному) волновому фронту. Интервал
между измерениями должен быть выбран таким, чтобы долговременными дрейфами приемника излучения лазера и фона можно было пренебречь. Отсчетов в двух ортогональных направлениях относительно опорной плоскости приемника должно быть не менее 10. Наклон должен варьироваться в соответствии с 3.5 от минус
до плюс
.
Рекомендуемый способ измерений ![]() заключается в формировании сферического волнового фронта с помощью наконечника одномодового волокна, закрепленного на перемещаемом в
заключается в формировании сферического волнового фронта с помощью наконечника одномодового волокна, закрепленного на перемещаемом в направлениях столике в передней фокальной плоскости тщательно скорректированной линзы. Наклон
плоской волны за линзой связан с ее фокусным расстоянием
и перемещением столика
соотношением:
![]() .
.
10.3 Влияние окружающей среды
Вариации результатов измерений могут быть вызваны изменениями температуры окружающей среды, вибрациями, рассеянным светом или окружающим освещением. Изменения температуры вызывают медленные систематические смещения (например, дрейфы), и их следует контролировать дополнительным, чувствительным к вариациям температуры средством измерений. Его показания следует использовать для корректировки результата измерений. Кроме того, тепловые дрейфы могут быть минимизированы предварительным прогревом лазера и приемно-усилительного устройства. Рассеянный свет и окружающее освещение увеличивают фоновую составляющую сигнала, порождая систематические погрешности оценки местоположений центроидов в датчике Шока-Гартмана. Фон должен быть тщательно изучен, а вызываемая им помеха подлежит вычитанию из измеренного сигнала.
10.4 Недостатки системы сбора и обработки данных
Отношение сигнал - шум и неопределенность измерений непосредственно зависят от пространственной разрешающей способности датчика Шока-Гартмана, ограниченного диаметра субапертуры, процесса дискретизации и нелинейности усилителя электрических сигналов. Джиттер в ПЗС-приемнике вносит нарастающую (накапливаемую, кумулятивную) погрешность, поскольку вызывает неопределенность местоположения пикселя. Во избежание этого может быть использована цифровая ПЗС-камера.
Примечания
1 Погрешность квантования вносит лишь незначительный вклад в нарастающую (накапливаемую, кумулятивную) погрешность даже у 8-разрядного аналого-цифрового преобразователя (АЦП), если используют весь динамический диапазон. При наличии значительного фона или нежелательного ограничения поперечного сечения пучка (отсечки его периферийной части) необходимо применять 10- или даже 12-разрядный АЦП.
2 Датчики Гартмана могут служить источником неопределенности при определении градиента волнового фронта из-за вариаций плотности мощности по поверхности одиночного пинхола в сегментированной матрице. Указанный эффект незначителен во многих применениях этого датчика. Например, если плотность мощности изменяется на 1% по поверхности пинхола диаметром 100 мкм при расстоянии 10 мм, то погрешность определения градиента волнового фронта составит не более 10 мкрад.
3 Основным источником неопределенности часто служит ограниченное число покрываемых сечением пучка элементов приемника излучения.
10.5 Неопределенности, обусловленные разъюстировкой измерительной установки
Для датчиков Шока-Гартмана особенно чувствителен вклад в кумулятивную неопределенность, вносимый разъюстировками из-за механических ударов, нестабильностей температуры окружающей среды или деградацией материалов. Ошибочная оценка местоположений центроидов в датчике Шока-Гартмана может служить результатом неточности позиционирования матрицы микролинз в фокальной плоскости. Аксиальное смещение приводит к дополнительной положительной или отрицательной расфокусировке. Поперечное смещение приемника излучения или матрицы микролинз/пинхолов вызывает искусственный наклон всего пучка. Обе причины не влияют на функцию искажений (аберраций) волнового фронта.
Ряд систематических погрешностей может возникнуть из-за дополнительного поворота приемника излучения относительно матрицы микролинз/пинхолов. Результирующая погрешность неинтегрируема и зависит от численного алгоритма реконструкции волнового фронта, а также от угла поворота.
В случае появления предположений о возможности разъюстировки измерительной установки следует немедленно провести заново ее калибровку.
Отклонение референтного (опорного) пучка от требуемого положения волнового фронта непосредственно вносит дополнительную аддитивную неопределенность.
11 Протокол измерений
В протоколе измерений должны быть приведены следующие данные:
a) общие сведения:
1) запись о том, что измерения выполнены в соответствии со стандартом ИСО 15367-2:2005;
2) дата проведения измерений;
3) наименование и адрес организации, выполнявшей измерения;
4) фамилия и инициалы оператора;
b) сведения об испытуемом лазере:
1) тип лазера;
2) производитель;
3) торговая марка и обозначение модели;
4) серийный номер;
c) условия выполнения измерений:
1) длина(ы) волн, при которой(ых) были проведены измерения;
2) температура в кельвинах (для диодного лазера температура охлаждающей жидкости) (только для диодных лазеров);
3) режим излучения (непрерывный или импульсный);
4) характеристики лазера и его излучения:
i) мощность или энергия излучения;
ii) ток или энергия системы питания;
iii) энергия импульса излучения;
iv) длительность импульса;
v) частота следования импульсов;
5) модовая структура;
6) поляризация;
7) условия окружающей среды;
d) сведения о методике и средствах измерений:
1) методика измерений:
i) Гартмана;
ii) Шока-Гартмана;
2) приемно-усилительное устройство и схема дискретизации данных:
i) производитель;
ii) обозначение модели;
iii) размеры матрицы пинхолов/микролинз;
iv) геометрия (форма) матрицы;
v) расстояние ;
vi) датчик Гартмана:
- расстояния ,
;
- диаметр отверстия ;
vii) датчик Шока-Гартмана:
- расстояния ,
;
- фокусное расстояние ;
3) тип позиционно-чувствительного приемника излучения:
i) расстояние между пикселями;
ii) размер пикселя;
iii) динамический диапазон;
iv) постоянная времени;
v) время задержки стробирующего устройства (только для импульсных лазеров);
vi) длительность временного интервала измерений (только для импульсных лазеров);
4) местоположение плоскости измерений ;
5) оптические элементы формирования пучка и способ ослабления:
i) тип ослабителя;
ii) тип делителя излучения;
iii) тип фокусирующего элемента;
6) другие оптические элементы и устройства, использованные при измерениях (поляризатор, монохроматор и пр.);
7) калибровка датчика Шока-Гартмана:
i) тип и длина волны коллимированного референтного (опорного) пучка;
ii) оценка среднего квадратического искажения (деформации) волнового фронта опорного пучка;
iii) дата калибровки;
8) вычитание фона:
i) методика вычитания;
ii) выбор пороговых значений ![]() ;
;
9) численный метод реконструкции (восстановления) волнового фронта (зональный, модальный):
i) зональный метод: разностная схема, использованная для численного интегрирования ![]() ;
;
ii) модальный метод:
- базовая система (например, полиномы Цернике, Лежандра, Эрмита, Чебышева);
- степень аппроксимации;
e) результаты измерений:
1) необработанные данные: представление измеренных градиентов волнового фронта ,
векторной диаграммой [например, рисунок 4а];
2) волновой фронт: полученный в виде оценки скорректированный волновой фронт ![]() и/или функция аберраций волнового фронта
и/или функция аберраций волнового фронта ![]() должны быть визуализированы одним из следующих способов:
должны быть визуализированы одним из следующих способов:
i) таблицы данных;
ii) трехкоординатное (3D) распределение (например, рисунки 4 и 5);
iii) контур;
iv) интерферограмма;
3) оценки величин, характеризующих волновой фронт:
i) расфокусировка или радиус сферы, обеспечивающей наилучшую аппроксимацию ;
ii) нерегулярность волнового фронта ;
iii) взвешенная средняя квадратическая деформация ;
iv) коэффициенты полиномов (при модальной реконструкции волнового фронта);
4) неопределенность типа А оценки волнового фронта ![]() .
.
Приложение А
(справочное)
Реконструкция (восстановление) волнового фронта
А.1 Разностные схемы
Путем численного интегрирования по измеренным значениям градиента может быть проведена реконструкция волнового фронта в определенной точке сетки. Для упрощения обозначений деление чувствительной поверхности приемника излучения на
![]() прямоугольных апертур обозначено индексами (
прямоугольных апертур обозначено индексами (). Однако при отсутствии специальных указаний приводимые далее соотношения справедливы и для более сложных форм чувствительных поверхностей приемников излучения.
Во-первых, используют подходящую разностную схему для аппроксимации :
![]() и
и ![]() . (А.1)
. (А.1)
Здесь порядок аппроксимации, равно как и значения
,
,
,
, могут изменяться при переходе от точки к точке. Более того,
и
могут быть определены для различных субсеток. Несколько полезных разностных формул для чувствительной поверхности приемника прямоугольной формы приведены в таблице А.1.
Таблица А.1 - Избранные разностные схемы для использования при реконструкции (восстановлении) волнового фронта
Градиент | Аппроксимация | Погрешность |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Несимметричные схемы остаются справедливыми при изменении знака (в том числе и индексов). Непрямоугольные формы поверхностей требуют применения адаптированных разностных схем.
Адаптированная схема должна быть приведена в протоколе измерений.
А.2 Нормальные уравнения
Поскольку измерения градиента волнового фронта подвержено влиянию шума и других источников неопределенности, реконструкция (восстановление) волнового фронта может быть выполнена лишь при использовании метода наименьших квадратов, приводящего к уравнению вида
 , (А.2)
, (А.2)
означающему непосредственную (прямую) реконструкцию (см. 8.1). Необходимое условие для решения уравнения (А.2):
![]() , (А.3)
, (А.3)
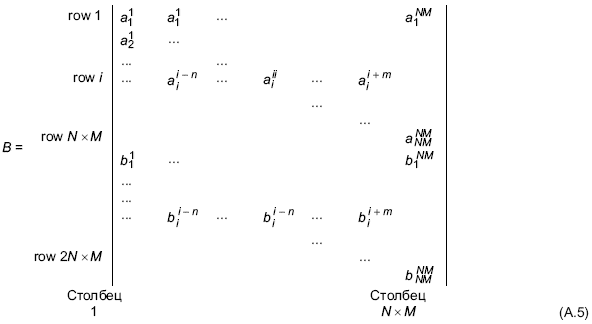
которое, в свою очередь, приводит к нормальным уравнениям:
![]() (А.4)
(А.4)
с ![]() системой матриц
системой матриц :
При известной статистике результатов измерений волнового фронта наилучшая линейная несмещенная оценка может быть вычислена по формуле
![]() (А.6)
(А.6)
с ![]() ковариантной матрицей
ковариантной матрицей . В случае применения любого дополнительного дефекта или появления внешнего шума с ковариантной матрицей
к меньшей средней квадратической погрешности приводит винеровская оценка:
![]() . (А.7)
. (А.7)
Приложение В
(справочное)
Описание волнового фронта полиномами Цернике
Полиномы Цернике ![]() образуют полное ортогональное множество для внутренней области единичного круга в вещественной плоскости [1]. Следовательно, они особенно ценны при рассмотрении круговых апертур и могут быть представлены в комплексной форме:
образуют полное ортогональное множество для внутренней области единичного круга в вещественной плоскости [1]. Следовательно, они особенно ценны при рассмотрении круговых апертур и могут быть представлены в комплексной форме:
![]() (В.1)
(В.1)
с 1
0 и при
четном. Уравнение (В.1) может быть представлено в вещественной форме введением четных (
) и нечетных (
) функций
для каждой пары (
,
):
![]() (В.2)
(В.2)
Точное выражение для радиальных полиномов представляют следующим образом:
![]() . (В.3)
. (В.3)
Таблица В.1 содержит точные выражения ряда первых полиномов Цернике.
Таблица В.1 - Первые полиномы Цернике и соответствующие типы искажений
Полином Цернике | Выражение | Тип искажения | |
1 | Цилиндричность фронта | ||
| Вершина | ||
| Наклон | ||
| Расфокусировка | ||
| Астигматизм | ||
| Кома | ||
| Сферическая аберрация | ||
Примечание - Обозначения в скобках в первом столбце соответствуют ИСО 10110-5. | |||
Таким образом, волновой фронт ![]() описывается полиномом Цернике в следующем виде:
описывается полиномом Цернике в следующем виде:
![]() . (В.4)
. (В.4)
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов ссылочным национальным стандартам Российской Федерации
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
ИСО 11145 | - | * |
ИСО 13694 | IDT | ГОСТ Р ИСО 13694-2010 "Оптика и оптические приборы. Лазеры и лазерные установки (системы). Методы измерений распределения плотности мощности (энергии) лазерного пучка" |
ИСО 15367-1:2003 | IDT | ГОСТ Р ИСО 15367-1-2012 "Лазеры и лазерные установки (системы). Методы измерений формы волнового фронта пучка лазерного излучения. Часть 1. Терминология и основные положения" |
* Соответствующий национальный стандарт отсутствует. До его утверждения рекомендуется использовать перевод на русский язык данного международного стандарта. Перевод данного международного стандарта находится в Федеральном информационном фонде технических регламентов и стандартов. Примечание - В настоящей таблице использовано следующее условное обозначение степени соответствия стандартов: - IDT - идентичные стандарты. | ||
Библиография
[1] | Born M. and Wolf E. Principles of Optics, 7 |
[2] | Tyson R.K. Principles of Adaptive Optics, 2nd., Academic Press. 1998 |
[3] | Vetterling W.T., Teukolsky S.A., Press W.H., Flannery B.P. Numerical Recipes in C. 2ed ed., Cambridge University Press, 1992 |
[4] | ISO 9334, Optics and optical instruments - Optical transfer function - Definitions and mathematical relation |
[5] | IEC 61040, Power and energy measuring detectors, instruments and equipment for laser radiation |
[6] | ISO 10110-5, Optics and optical instruments - Preparation of drawings for optical elements and systems - Part 5: Surface form tolerances |
[7] | ISO 11146-1, Lasers and laser-related equipment - Test methods for laser beam widths, divergence angles and beam propagation ratios - Part 1: Stigmatic and simple astigmatic beams |
[8] | ISO 11146-2, Lasers and laser-related equipment - Test methods for laser beam widths, divergence angles and beam propagation ratios - Part 2: General astigmatic beams |
Электронный текст документа
и сверен по:
, 2013
{kind=link}