ГОСТ ISO 1328-1-2017
Группа Г15
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
ПЕРЕДАЧИ ЗУБЧАТЫЕ ЦИЛИНДРИЧЕСКИЕ
Система ISO. Классификация допусков на боковые поверхности зубьев
Часть 1
Определения и допускаемые значения отклонений на боковые поверхности зубьев зубчатого колеса
Cylindrical gears. ISO system. Flank tolerance classification. Part 1. Definitions and allowable values of deviations relevant to flanks of gear teeth
МКС 21.200
ОКП 417000
Дата введения 2020-01-01
Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены в ГОСТ 1.0-2015 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2-2015 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, обновления и отмены"
Сведения о стандарте
1 ПОДГОТОВЛЕН Федеральным государственным унитарным предприятием "Центральный институт авиационного моторостроения имени П.И.Баранова" (ФГУП "ЦИАМ им.П.И.Баранова") на основе собственного перевода на русский язык англоязычной версии стандарта, указанного в пункте 5
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 258 "Зубчатые передачи и конструктивные элементы деталей машин"
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол от 30 ноября 2017 г. N 52)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по МК (ИСО 3166) 004-97 | Сокращенное наименование национального органа по стандартизации |
Армения | АМ | Минэкономики Республики Армения |
Казахстан | KZ | Госстандарт Республики Казахстан |
Киргизия | KG | Кыргызстандарт |
Россия | RU | Росстандарт |
Туркмения | ТМ | Главгосслужба "Туркменстандартлары" |
(Поправка. ИУС N 1-2021).
4 Приказом Федерального агентства по техническому регулированию и метрологии от 30 октября 2018 г. N 861-ст межгосударственный стандарт ГОСТ ISO 1328-1-2017 введен в действие в качестве национального стандарта Российской Федерации с 1 января 2020 г.
5 Настоящий стандарт идентичен международному стандарту ISO 1328-1:2013* "Передачи зубчатые цилиндрические. Система ISO по классификации допусков на боковые поверхности зубьев. Часть 1. Определения и допускаемые значения отклонений на боковые поверхности зубьев зубчатого колеса" ("Cylindrical gears - ISO system of flank tolerance classification - Part 1: Definitions and allowable values of deviations relevant to flanks of gear teeth", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Международный стандарт ISO 1328-1-2013 разработан Техническим комитетом ISO/TC 60 Международной организации по стандартизации (ISO).
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с ГОСТ 1.5 (подраздел 3.6).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
6 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодном информационном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячном информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
ВНЕСЕНА поправка, опубликованная в ИУС N 1, 2021 год
Поправка внесена изготовителем базы данных
1 Область применения
Настоящий стандарт устанавливает систему классификации допусков, относящуюся к производству и оценке качества боковых поверхностей зубьев эвольвентных цилиндрических зубчатых колес. Настоящий стандарт определяет термины, касающиеся допусков боковой поверхности зубьев, структуру системы степеней точности и допускаемые значения.
Настоящий стандарт устанавливает единую систему допусков, которой с обоюдной выгодой могут пользоваться как производитель зубчатых передач, так и потребитель. Система допусков предусматривает одиннадцать классов точности, которые пронумерованы цифрами от 1 до 11 в порядке увеличения допуска. Формулы для расчета допусков приведены в 5.3. Эти допуски применимы для следующих диапазонов значений:
5![]() 1000
1000
5 мм![]() 15000 мм
15000 мм
0,5 мм ![]() 70 мм
70 мм
4 мм ![]() 1200 мм
1200 мм
45°
где d - диаметр делительный;
- модуль нормальный;
b - ширина зубьев (осевая);
z - число зубьев;
- угол наклона зубьев на делительном цилиндре.
В разделе 4 дана информация об обязательных и дополнительных методах измерения.
В настоящем стандарте не рассматриваются вопросы проектирования зубчатых передач и структура поверхности.
Для получения дополнительной информации о текстуре поверхности см. ISO/TR 10064-4.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты*. Для датированных ссылок применяют только указанное издание. Для недатированных - последнее издание (включая все поправки к нему).
_______________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
ISO 701, International gear notation - Symbols for geometrical data (Обозначения международные для зубчатых передач. Обозначения геометрических данных)
ISO 1122-1, Vocabulary of gear terms - Part 1: Definitions related to geometry (Передачи зубчатые. Словарь. Часть 1. Определения, связанные с геометрией)
ISO 1328-2, Cylindrical gears - ISO system of accuracy - Part 2: Definitions and allowable values of deviations relevant to radial composite deviations and runout information (Передачи зубчатые цилиндрические. Система точности по ISO. Часть 2. Определения и допустимые значения отклонений, относящихся к радиальным составным отклонениям, и информация об отклонениях)
ISO/TR 10064-1, Code of inspection practice - Part 1: Inspection of corresponding flanks of gear teeth (Практическое руководство по приемке. Часть 1. Контроль соответствующих боковых поверхностей зубьев)
ISO/TS 16610-1, Geometrical product specifications (GPS) - Filtration - Part 1: Overview and basic concepts (Геометрические характеристики изделий (GPS). Фильтрация. Часть 1. Обзор и основные понятия)
ISO 16610-21, Geometrical product specifications (GPS) - Filtration - Part 21: Linear profile filters: Gaussian filters (Геометрические характеристики изделий (GPS). Фильтрация. Часть 21. Линейные профильные фильтры. Фильтры Гаусса)
ISO 21771, Gears - Cylindrical involute gears and gear pairs - Concepts and geometry (Передачи зубчатые. Цилиндрические эвольвентные зубчатые колеса и передачи. Понятия и геометрия)
3 Термины, определения и обозначения
3.1 Основные термины и обозначения
В настоящем стандарте применены следующие термины с соответствующими определениями.
Примечание 1 - Для получения определений геометрических терминов, связанных с зацеплением зубчатых колес, используйте ISO 701, ISO 1122-1 и ISO 21771.
Примечание 2 - Некоторые из обозначений и терминология, содержащиеся в этой части ISO 1328, могут отличаться от тех, которые используются в других документах и международных стандартах.
Примечание 3 - Термины и обозначения, используемые в этой части ГОСТ ISO 1328, перечислены в алфавитном порядке в таблице 1 (по термину) и в таблице 2 (по обозначению). Подстрочный индекс "T" используется для значений допуска.
Таблица 1 - Термины в алфавитном порядке с обозначениями
Термин | Обозначение | Единица измерения |
Верхняя точка активного профиля зуба (active tip diameter point on line of action) | - | |
Диаметр вершин зубьев (tip diameter) | мм | |
Диаметр делительный (reference diameter) | d | мм |
Диаметр начальный (working pitch diameter) | мм | |
Диаметр окружности нижних точек активных профилей зубьев зубчатого колеса (start of active profile diameter) | мм | |
Диаметр окружности верхних точек активных профилей зубьев зубчатого колеса (active tip diameter) | мм | |
Диаметр окружности впадин (root form diameter) | мм | |
Диаметр окружности притупленных кромок зубчатого колеса (tip form diameter) | мм | |
Диаметр основной (base diameter) | мм | |
Диаметр измерительный (measurement diameter) | мм | |
Длина зоны модификации головки (tip relief zone) | - | |
Длина зоны модификации ножки (root relief zone) | мм | |
Длина средней зоны боковой поверхности (middle profile zone) | - | |
Длина участка измерения погрешности направления зубьев (helix evaluation length) | мм | |
Колебание измерительного межосевого расстояния за оборот колеса (radial composite deviation, total) | мкм | |
Колебание измерительного межосевого расстояния на одном зубе (radial composite deviation, tooth-to-tooth) | мкм | |
Местная однопрофильная кинематическая погрешность (single flank composite deviation, tooth-to-tooth) | мкм | |
Местная однопрофильная кинематическая погрешность, допуск (single flank composite tolerance, tooth-to-tooth) | мкм | |
Модификации головки зубьев. Максимальная длина (maximum length of tip relief) |
| мм |
Модификации головки зубьев. Минимальная длина (minimum length of tip relief) |
| мм |
Модификации ножки зубьев. Максимальная длина (maximum length of root relief) |
| мм |
Модификации ножки зубьев. Минимальная длина (minimum length of root relief) |
| мм |
Модуль нормальный (normal module) | мм | |
Наибольшая однопрофильная кинематическая погрешность зубчатого колеса (single flank composite deviation, total) | мкм | |
Наибольшая однопрофильная кинематическая погрешность зубчатого колеса, допуск (single flank composite tolerance, total) | мкм | |
Накопленная погрешность i-го шага зубчатого колеса, функциональная (cumulative pitch deviation (index deviation), individual) | мкм | |
Накопленная погрешность (number of pitches in a sector k шагов) | мкм | |
Накопленная погрешность шага по сектору (sector pitch deviation) | мкм | |
Накопленная погрешность шага по сектору, допуск (sector pitch tolerance) | мкм | |
Общая накопленная погрешность шага зубчатого колеса (по абсолютной величине) (cumulative pitch deviation (index deviation), total) | мкм | |
Общая накопленная погрешность шага зубчатого колеса (по абсолютной величине), допуск (cumulative pitch (index) tolerance, total) | мкм | |
Оценочный диапазон профиля (profile evaluation length) | мм | |
Погрешность направления зубьев, общая (helix deviation, total) | мкм | |
Погрешность направления зубьев, общая, допуск (helix tolerance, total) | мкм | |
Погрешность направления зубьев, по углу отклонения (helix slope deviation) | мкм | |
Погрешность направления зубьев, по углу отклонения, допуск (helix slope tolerance) | мкм | |
Погрешность направления зубьев, по форме отклонения (helix form deviation) | мкм | |
Погрешность направления зубьев, по форме отклонения, допуск (helix form tolerance) | мкм | |
Погрешность шага (single pitch deviation) | мкм | |
Погрешность шага, допуск (single pitch tolerance) | мкм | |
Порог фильтра при измерении направления зубьев (helix form filter cutoff) | мм | |
Порог фильтра при измерении формы профиля (profile form filter cutoff) | мм | |
Профиль, диаметр начала измерений боковой поверхности на ножке зуба (profile control diameter) | мм | |
Длина линии зацепления (length of path of contact) | мм | |
Профиль, общая погрешность (profile deviation, total) | мкм | |
Профиль, общая погрешность, допуск (profile tolerance, total) | мкм | |
Профиль, погрешность наклона (profile slope deviation) | мкм | |
Профиль, погрешность наклона, допуск (profile slope tolerance) | мкм | |
Профиль, погрешность формы (profile form deviation) | мкм | |
Профиль, погрешность формы, допуск (profile form tolerance) | мкм | |
Радиальное биение (runout) | мкм | |
Размер по шарикам или роликам (individual radial measurement) | мкм | |
Размер пятна контакта (contact pattern evaluation) | - | |
Размер угловой фаски на вершине зуба (tip corner chamfer) | мм | |
Разность соседних шагов (adjacent pitch difference) | мкм | |
Разность соседних шагов, допуск (adjacent pitch difference tolerance) | мкм | |
Степень точности (flank tolerance class) | A | - |
Толщина зуба (tooth thickness) | s | мм |
Точка на прямой касательной основной окружности, лежащая на основной окружности (contact point tangent at base circle) | T | - |
Точка боковой поверхности, в которой измеряется погрешность шагов (pitch point) | C | - |
Точка начала активного профиля на линии зацепления (start of active profile point on line of action) | - | |
Угол зацепления, торцовый (working transverse pressure angle) | градусы | |
Угол наклона зубьев на делительном цилиндре (helix angle) | градусы | |
Утонения головки зуба при С-модификации (amount of tip relief) | мкм | |
Утонения ножки зуба при С-модификации (amount of root relief) | мкм | |
Функциональная погрешность i-х шагов (single pitch deviation (individual)) | мкм | |
Функциональная разность соседних i-х шагов (adjacent pitch difference, individual) | мкм | |
Число зубьев (number of teeth) | z | - |
Число шагов в секторе измерения шагов (number of pitches in a sector) | k | - |
Шаг торцовый на диаметре измерения шагов (pitch, transverse circular on measurement diameter) | мм | |
Ширина зубчатого венца (осевая) (facewidth (axial)) | b | мм |
| ||
Таблица 2 - Обозначения в алфавитном порядке с терминами
Обозначение | Термин | Единица измерения |
A | Степень точности (flank tolerance class) | - |
b | Ширина зубчатого венца (осевая) (facewidth (axial)) | мм |
C | Точка боковой поверхности, в которой измеряется погрешность шагов (pitch point) | - |
Утонения головки зуба при С-модификации (amount of tip relief) | мкм | |
Утонения ножки зуба при С-модификации (amount of root relief) | мкм | |
Размер пятна контакта (contact pattern evaluation) | - | |
d | Диаметр делительный (reference diameter) | мм |
Диаметр вершин зубьев (tip diameter) | мм | |
Диаметр основной (base diameter) | мм | |
Профиль, диаметр начала измерений боковой поверхности на ножке зуба (profile control diameter) | мм | |
Диаметр окружности притупленных кромок зубчатого колеса (tip form diameter) | мм | |
Диаметр окружности впадин (root form diameter) | мм | |
Диаметр измерительный (measurement diameter) | мм | |
Диаметр окружности верхних точек активных профилей зубьев зубчатого колеса (active tip diameter) | мм | |
Диаметр окружности нижних точек активных профилей зубьев зубчатого колеса (start of active profile diameter) | мм | |
Диаметр начальный (working pitch diameter) | мм | |
Колебание измерительного межосевого расстояния за оборот колеса (radial composite deviation, total) | мкм | |
Наибольшая однопрофильная кинематическая погрешность зубчатого колеса (single flank composite deviation, total) | мкм | |
Наибольшая однопрофильная кинематическая погрешность зубчатого колеса, допуск (single flank composite tolerance, total) | мкм | |
Общая накопленная погрешность шага зубчатого колеса (по абсолютной величине) (cumulative pitch deviation (index deviation), total) | мкм | |
Накопленная погрешность i-го шага зубчатого колеса, функциональная (cumulative pitch deviation (index deviation), individual) | мкм | |
Накопленная погрешность шага по сектору (sector pitch deviation) | мкм | |
Накопленная погрешность шага по сектору, допуск (sector pitch tolerance) | мкм | |
Накопленная погрешность шага зубчатого колеса (по абсолютной величине), допуск (cumulative pitch (index) tolerance, total) | мкм | |
Накопленная погрешность k шагов (pitch span deviation) | мкм | |
Радиальное биение (runout) | мкм | |
Профиль, общая погрешность (profile deviation, total) | мкм | |
Профиль, общая погрешность, допуск (profile tolerance, total) | мкм | |
Погрешность направления зубьев, общая (helix deviation, total) | мкм | |
Погрешность направления зубьев, общая, допуск (helix tolerance, total) | мкм | |
Профиль, погрешность формы (profile form deviation) | мкм | |
Профиль, погрешность формы, допуск (profile form tolerance) | мкм | |
Погрешность направления зубьев, по форме отклонения (helix form deviation) | мкм | |
Погрешность направления зубьев, по форме отклонения, допуск (helix form tolerance) | мкм | |
Профиль, погрешность наклона (profile slope deviation) | мкм | |
Профиль, погрешность наклона, допуск (profile slope tolerance) | мкм | |
Погрешность направления зубьев, по углу отклонения (helix slope deviation) | мкм | |
Погрешность направления зубьев, по углу отклонения, допуск (helix slope tolerance) | мкм | |
Колебание измерительного межосевого расстояния на одном зубе (radial composite deviation, tooth-to-tooth) | мкм | |
Местная однопрофильная кинематическая погрешность (single flank composite deviation, tooth-to-tooth) | мкм | |
Местная однопрофильная кинематическая погрешность, допуск (single flank composite tolerance, tooth-to-tooth) | мкм | |
Погрешность шага (single pitch deviation) | мкм | |
Функциональная погрешность i-х шагов (single pitch deviation (individual)) | мкм | |
Погрешность шага, допуск (single pitch tolerance) | мкм | |
Разность соседних шагов (adjacent pitch difference) | мкм | |
Функциональная разность соседних i-х шагов (adjacent pitch difference, individual) | мкм | |
Разность соседних шагов, допуск (adjacent pitch difference tolerance) | мкм | |
Длина линии зацепления (length of path of contact) | мм | |
Размер угловой фаски на вершине зуба (tip corner chamfer) | мм | |
k | Число шагов в секторе измерения шагов (number of pitches in a sector) | - |
Длина средней зоны боковой поверхности (middle profile zone) | - | |
Длина зоны модификации головки (tip relief zone) | - | |
Длина зоны модификации ножки (root relief zone) | - | |
| Модификации головки зубьев. Максимальная длина (maximum length of tip relief) | мм |
| Модификации головки зубьев. Минимальная длина (minimum length of tip relief) | мм |
| Модификации ножки зубьев. Максимальная длина (maximum length of root relief) | мм |
| Модификации ножки зубьев. Минимальная длина (minimum length of root relief) | мм |
Оценочный диапазон профиля (profile evaluation length) | мм | |
Длина участка измерения погрешности направления зубьев (helix evaluation length) | мм | |
Нормальный модуль (normal module) | мм | |
Верхняя точка активного профиля зуба (active tip diameter point on line of action) | - | |
Точка начала активного профиля на линии зацепления (start of active profile point on line of action) | - | |
Шаг торцовый на диаметре измерения шагов (pitch, transverse circular on measurement diameter) | мм | |
Размер по шарикам или роликам (Individual radial measurement) | мкм | |
s | Толщина зуба (tooth thickness) | мм |
T | Точка на прямой касательной основной окружности, лежащая на основной окружности (contact point tangent at base circle) | - |
z | Число зубьев (number of teeth) | - |
Угол зацепления, торцовый (working transverse pressure angle) | градус | |
Угол наклона зубьев на делительном цилиндре (helix angle) | градус | |
Порог фильтра при измерении формы профиля (profile form filter cutoff) | мм | |
Порог фильтра при измерении направления зубьев (helix form filter cutoff) | мм | |
| ||
3.2 Основные размеры
3.2.1 диаметр делительный d: Диаметр делительной окружности.
Примечание 1 - Делительный диаметр используется для расчета значений допусков.
Примечание 2 - См. ISO 21771:2007, 4.2.4.
3.2.2 диаметр измерительный ![]() : Диаметр окружности, являющейся концентрической по отношению к базовой оси (3.2.7). На этой окружности измерительный щуп находится в контакте с боковыми поверхностями зуба во время измерения погрешности направления зубьев, погрешности шага или отклонения толщины зуба.
: Диаметр окружности, являющейся концентрической по отношению к базовой оси (3.2.7). На этой окружности измерительный щуп находится в контакте с боковыми поверхностями зуба во время измерения погрешности направления зубьев, погрешности шага или отклонения толщины зуба.
Примечание 1 - Измерительный диаметр обычно находится вблизи центра боковой поверхности зуба.
Примечание 2 - См. ISO/TR 10064-3.
3.2.3 порог фильтра при измерении формы профиля : Длина волны, равная 50% амплитуды данных об измерении эвольвентного профиля, передаваемая через низкочастотный фильтр Гаусса, таким образом включая в дальнейшую обработку только большие длины волн.
Примечание 1 - См. 4.4.6 и приложение C.
3.2.4 порог фильтра при измерении направления зубьев : Длина волны, равная 50% амплитуды данных о направлении зубьев, передаваемая через низкочастотный фильтр Гаусса, таким образом, включая в дальнейшую обработку только большие длины волн.
Примечание 1 - См. 4.4.6 и приложение C.
3.2.5 длина траектории обката: Длина траектории обката, линейное расстояние вдоль общей нормали от ее контакта с основной окружностью до данной точки на эвольвентном профиле в торцовой плоскости.
Примечание 1 - Длина траектории обката является альтернативой углу обката для определения выбранных положений определенного диаметра на эвольвентном профиле.
Примечание 2 - См. рисунок 1 и ISO 21771:2007 (4.3.8).
3.2.6 длина линии зацепления : Длина траектории обката (3.2.5) от начала активного профиля
![]() до диаметра окружности притупленных кромок зубчатого колеса
до диаметра окружности притупленных кромок зубчатого колеса ![]() или до точки, в которой контакт прерывается возможностью подрезания сопряженной детали (конец активного профиля).
или до точки, в которой контакт прерывается возможностью подрезания сопряженной детали (конец активного профиля).
3.2.7 базовая ось: Ось, по отношению к которой определяются характеристики зубчатого колеса, и в частности допуски на погрешности шага, профиля и направления зуба.
Примечание 1 - Базовая ось в зубчатых передачах определяется базовыми поверхностями.
Примечание 2 - См. ISO/TR 10064-3.
|
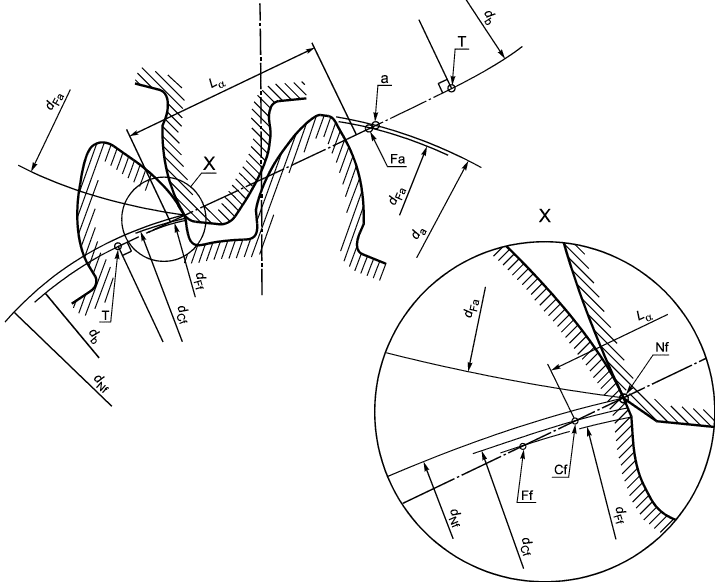
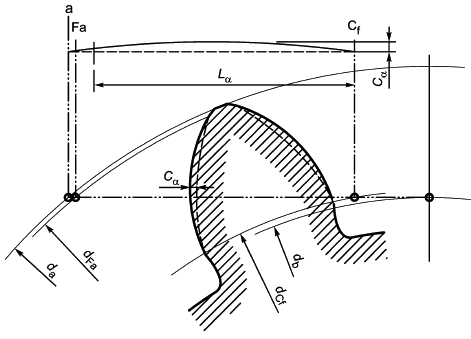
Обозначения | ||||
| оценочный диапазон профиля. Длина траектории обката (линии зацепления) | Диаметры | ||
от диаметра начала измерений боковой поверхности на ножке зуба до |
| вершин зубьев; | ||
диаметра окружности верхних точек активных профилей зубьев зубчатого |
| основной; | ||
колеса |
| начала измерений боковой поверхности на ножке зуба; | ||
|
| окружности притупленных кромок зубчатого колеса; | ||
a - | вершина; |
| окружности впадин; | |
Cf - | начала измерений боковой поверхности на ножке зуба; |
| окружности нижних точек активных профилей зубьев зубчатого колеса | |
Fa - | начала притупления кромок; | |||
Ff - | впадина; | |||
Nf - | точка начала активного профиля на линии зацепления; | |||
T - | точка на прямой касательной основной окружности, лежащая на основной окружности; | |||
| линия зацепления; | |||
Примечание - У диаметров на сопряженном зубчатом колесе те же самые обозначения, но их значения отличаются.
Рисунок 1 - Диаметры и длина траектории обката для пары зубчатых колес внешнего зацепления
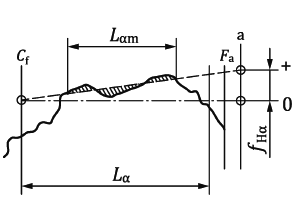
3.3 Погрешности шагов
3.3.1 функциональная погрешность i-тых шагов : Алгебраическая разность между действительным шагом и соответствующим теоретическим шагом в поперечной плоскости на измерительной окружности зубчатого колеса.
Примечание 1 - Это соответствует смещению любой боковой поверхности зуба от ее теоретического положения относительно одноименного профиля соседнего зуба.
Примечание 2 - Для левых боковых поверхностей, так же как для правых боковых поверхностей, есть столько же значений fpi, сколько и зубьев.
Примечание 3 - См. рисунок 2
|
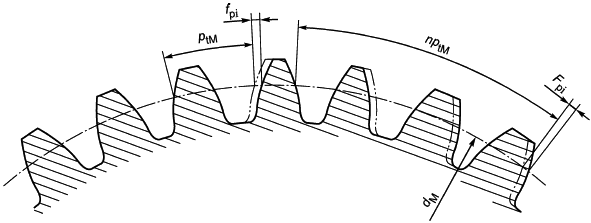
Обозначения:
![]() - теоретический;
- теоретический;
![]() - действительный
- действительный
Примечание - ![]() .
.
Рисунок 2 - Погрешности шага
3.3.2 погрешность шага ![]() : Максимальная абсолютная величина всех функциональных погрешностей i-х шагов (3.3.1).
: Максимальная абсолютная величина всех функциональных погрешностей i-х шагов (3.3.1).
Примечание - ![]() .
.
3.3.3 накопленная погрешность i-го шага зубчатого колеса, функциональная ![]() : Алгебраическая разность между длиной и теоретической длиной дуги, измеренной по сектору из n соседних шагов.
: Алгебраическая разность между длиной и теоретической длиной дуги, измеренной по сектору из n соседних шагов.
Примечание 1 - n изменяется от 1 до z; для левых боковых поверхностей, так же как для правых боковых поверхностей, есть столько же значений Fpi, сколько и зубьев.
Примечание 2 - В теории эта величина равна алгебраической сумме функциональных погрешностей i-х шагов (3.3.1) от 1 до n, что соответствует смещению любой боковой поверхности зуба от ее теоретического положения относительно боковой поверхности зуба данной величины.
Примечание 3 - См. рисунок 2 и приложение D.
3.3.4 общая накопленная погрешность шага ![]() : Наибольшая алгебраическая разность между значениями функциональной накопленной погрешности i-го шага зубчатого колеса (3.3.3), полученной для всех зубьев зубчатого колеса.
: Наибольшая алгебраическая разность между значениями функциональной накопленной погрешности i-го шага зубчатого колеса (3.3.3), полученной для всех зубьев зубчатого колеса.
Примечание - ![]() .
.
3.4 Погрешность профиля
3.4.1 Погрешности профиля. Общие сведения
3.4.1.1 диаметр начала измерений боковой поверхности на ножке зуба на профиле ![]() : Специально заданный диаметр, вне которого профиль зуба обязан соответствовать расчетному профилю (3.4.2.1).
: Специально заданный диаметр, вне которого профиль зуба обязан соответствовать расчетному профилю (3.4.2.1).
Примечание 1 - Если параметр не определен, то диаметр окружности нижних точек активных профилей зубьев зубчатого колеса, ![]() , используется в качестве диаметра начала измерений боковой поверхности на ножке зуба на профиле, см. последний параграф 4.5.
, используется в качестве диаметра начала измерений боковой поверхности на ножке зуба на профиле, см. последний параграф 4.5.
Примечание 2 - См. рисунки 1 и 3.
3.4.1.2 диаметр окружности притупленных кромок зубчатого колеса ![]() : Если иначе не определено, диаметр вершины минус удвоенный радиус закругления вершины или размер фаски.
: Если иначе не определено, диаметр вершины минус удвоенный радиус закругления вершины или размер фаски.
Примечание 1 - Это - минимальный специально заданный диаметр для зубчатых колес внешнего зацепления или максимальный специально заданный диаметр для зубчатых колес внутреннего зацепления, где может произойти притупление кромок (начинаются фаски на вершине или радиусе закругления вершины).
Примечание 2 - Если вершина зуба не притупляется, то диаметр окружности притупленных кромок зубчатого колеса принимается равным диаметру окружности вершин.
Примечание 3 - См. рисунки 1 и 3.
3.4.1.3 измеряемый профиль: Часть боковой поверхности зуба, с которой контактирует измерительный щуп в процессе измерения профиля. Этот участок должен включать диаметр начала измерений боковой поверхности на ножке зуба на профиле (3.4.1.1) и диаметр окружности притупленных кромок зубчатого колеса (3.4.1.2).
Примечание - См. рисунок 3.
|
|
а) Зубчатое колесо внешнего зацепления | b) Зубчатое колесо внутреннего зацепления |
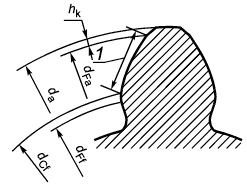
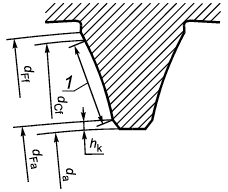
Рисунок 3 - Измеряемый профиль
3.4.1.4 диапазон контроля профиля: Участок измеряемого профиля (3.4.1.3), начинающийся от диаметра начала измерений боковой поверхности на ножке зуба на профиле (3.4.1.1) ![]() , и, если иначе не определено, заканчивающийся в 95% величины диаметра окружности притупленных кромок зубчатого колеса (3.4.1.2)
, и, если иначе не определено, заканчивающийся в 95% величины диаметра окружности притупленных кромок зубчатого колеса (3.4.1.2) ![]() .
.
Примечание - См. рисунки 4-8, 4.4.8 и ISO 21771.
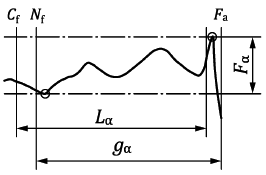
3.4.1.5 оценочный диапазон профиля ![]() : Длина траектории обката (3.2.5) из диапазона контроля профиля (3.4.1.4) в поперечной плоскости.
: Длина траектории обката (3.2.5) из диапазона контроля профиля (3.4.1.4) в поперечной плоскости.
Примечание - См. рисунок 1.
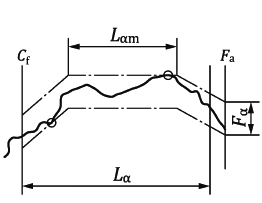
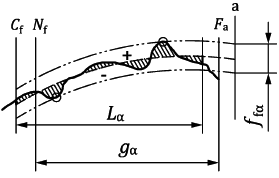
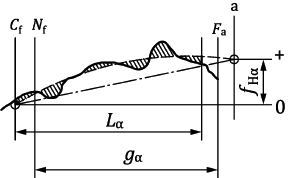
3.4.1.6 погрешность профиля: Величина, на которую измеряемый профиль (3.4.1.3) отличается от расчетного профиля (3.4.2.1).
Примечание - См. рисунки 4-8.
3.4.2 Анализ погрешностей профиля
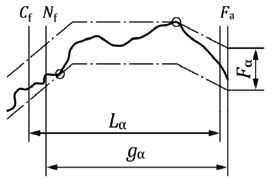
3.4.2.1 расчетный профиль: Профиль, определенный конструктором с помощью диаграммы, у которой одна ось представляет собой отклонение от теоретической эвольвенты, а другая ось - расстояние по касательной к основной окружности.
Примечание 1 - Когда расчетный профиль не задан, то он представляет собой теоретическую эвольвенту и изображается как прямая линия. На рисунках 4-8 расчетный профиль показан штрихпунктирной линией.
Примечание 2 - См. рисунки 4-8.
3.4.2.2 средняя линия профиля: Линия (или кривая), которая имеет форму расчетного профиля (3.4.2.1), повернутая относительно линии проведения измерений. Находится в диапазоне контроля профиля (3.4.1.4).
Примечание - См. 4.4.8.2 для получения более подробной информации об используемом методе.
|
|
|
а) Общая погрешность профиля | b) Погрешность формы профиля | с) Погрешность наклона профиля |
Обозначения: | Точки на линии зацепления | ||
| - измеряемый профиль; |
| начала измерений боковой поверхности на ножке зуба; |
| - точная копия расчетного профиля; |
| начала активного профиля на линии зацепления; |
| - средняя линия профиля; |
| начала притупления кромок; |
| - точная копия средней линии профиля | а - | вершина |
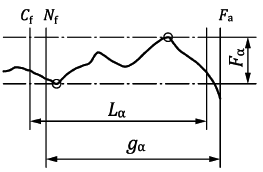
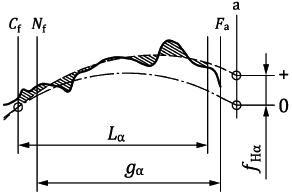
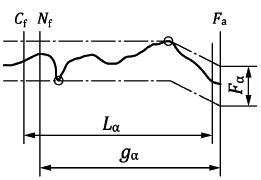
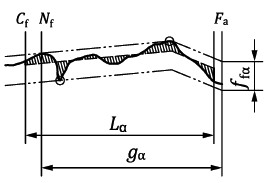
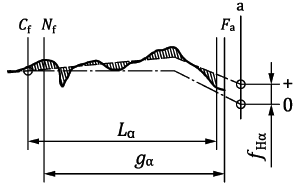
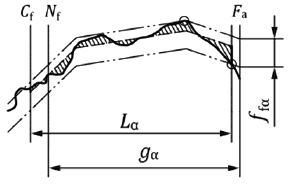
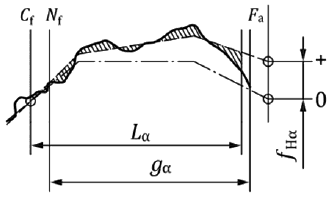
Рисунок 4 - Погрешности профиля с немодифицированной эвольвентой
|
|
|
а) Общая погрешность профиля | b) Погрешность формы профиля | с) Погрешность наклона профиля |
См. обозначения к рисунку 4
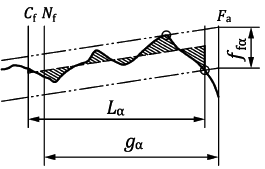
Рисунок 5 - Погрешности профиля с модифицированным углом зацепления
|
|
|
а) Общая погрешность профиля | b) Погрешность формы профиля | с) Погрешность наклона профиля |
См. обозначения к рисунку 4
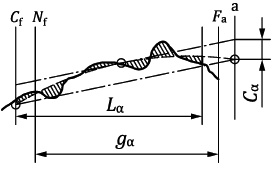
Рисунок 6 - Погрешности бочкообразного профиля
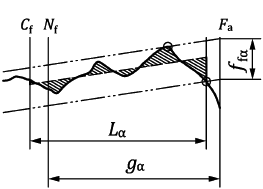
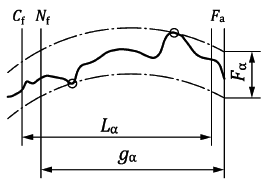
3.4.2.3 общая погрешность профиля : Расстояние между двумя точными копиями расчетного профиля (3.4.2.1), которые ограничивают допускаемые значения погрешности измеряемого профиля (3.4.1.3) на диапазоне контроля профиля (3.4.1.4).
Примечание 1 - Точные копии расчетного профиля параллельны расчетному профилю.
Примечание 2 - См. рисунки 4-8 и 4.4.8.2.
|
|
|
а) Общая погрешность профиля | b) Погрешность формы профиля | с) Погрешность наклона профиля |
См. обозначения к рисунку 4
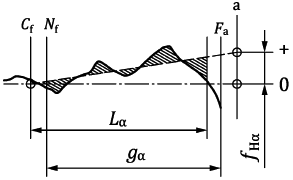
Рисунок 7 - Погрешности профиля с модифицированной головкой
|
|
|
а) Общая погрешность профиля | b) Погрешность формы профиля | с) Погрешность наклона профиля |
См. обозначения к рисунку 4
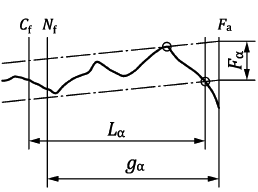
Рисунок 8 - Погрешности профиля с модифицированными головкой и ножкой
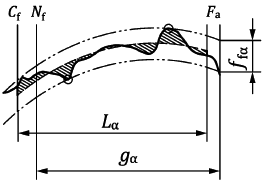
3.4.2.4 погрешность формы профиля : Расстояние между двумя точными копиями средней линии профиля (3.4.2.2), которые ограничивают допускаемые значения погрешности измеряемого профиля (3.4.1.3) на диапазоне контроля профиля (3.4.1.4).
Примечание 1 - Точные копии средней линии профиля параллельны средней линии профиля.
Примечание 2 - См. рисунки 4-8 и 4.4.8.2.
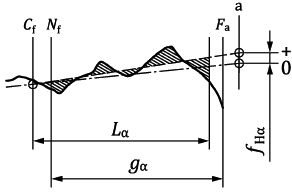
3.4.2.5 погрешность наклона профиля : Расстояние между двумя точными копиями расчетного профиля (3.4.2.1), которые пересекают экстраполируемую среднюю линию профиля (3.4.2.2) на диаметре начала измерений боковой поверхности на ножке зуба на профиле (3.4.1.1)
![]() и диаметре вершин зубьев
и диаметре вершин зубьев ![]() .
.
Примечание 1 - Точные копии расчетного профиля параллельны расчетному профилю.
Примечание 2 - См. рисунки 4-8.
3.5 Погрешности направления зуба
3.5.1 Погрешности направления зуба. Общие положения
3.5.1.1 измеряемое направление зуба: Вся боковая поверхность зуба, заключенная между торцевыми поверхностями или, в случае наличия, до торцевых фасок, скруглений или любой другой модификации, направленной на то, чтобы исключить модифицированную часть зуба от контакта с измерительным щупом в процессе измерения направления зуба.
3.5.1.2 диапазон контроля направления зуба: Область боковой поверхности, заключенная между торцевыми поверхностями или, в случае наличия, до начала торцевых фасок, скруглений, любой другой модификации, направленной на то, чтобы исключить модифицированную часть зуба от контакта с измерительным щупом, то есть, если не сказано иначе, область боковой поверхности, уменьшенная на 5% в осевом направлении c обоих концов от ширины зубчатого венца или длину, равную одному модулю.
Примечание 1 - Конструктор зубчатого колеса обязан гарантировать, что установленный им диапазон контроля направления зуба достаточен для качественного контроля данной конструкции.
Примечание 2 - См. 4.4.8.4.
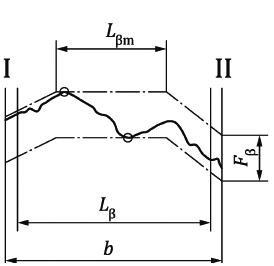
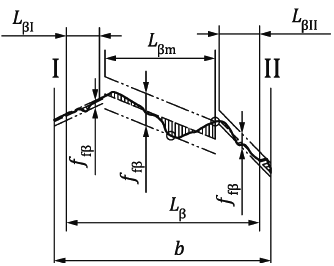
3.5.1.3 длина участка измерения погрешности направления зубьев : Осевая длина диапазона контроля направления зуба (3.5.1.2).
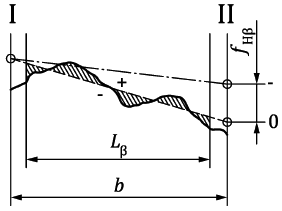
3.5.1.4 погрешность направления зуба: Величина, на которую измеряемое направление зуба (3.5.1.1) отличается от расчетного направления зуба (3.5.2.1)
Примечание - См. рисунки 9-13.
3.5.2 Анализ погрешностей направления зуба
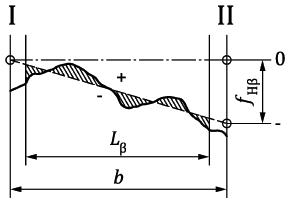
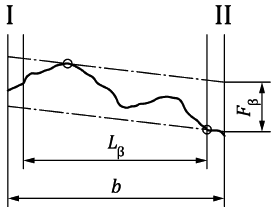
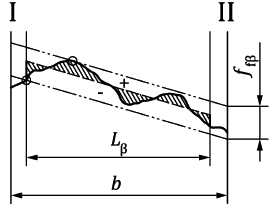
3.5.2.1 расчетное направление зуба: Направление зуба, определяемое конструктором с помощью диаграммы, у которой одна ось представляет собой отклонение от теоретического направления зуба, а другая ось - ширину зубчатого венца.
Примечание 1 - Если параметр не задан, то это - немодифицированное направление зуба.
Примечание 2 - См. рисунки 9-13.
3.5.2.2 средняя линяя направления зуба: Линия (или кривая), которая имеет форму расчетного направления зуба (3.5.2.1), и повернутая относительно линии проведения измерений.
Примечание 1 - См. 4.4.8.4 для получения более подробной информации об используемом методе.
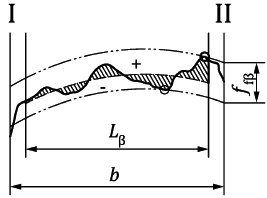
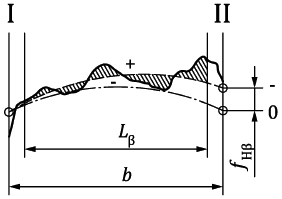
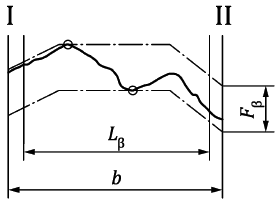
|
|
|
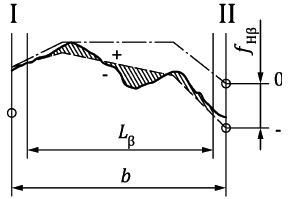
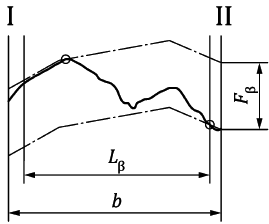
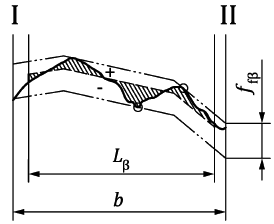
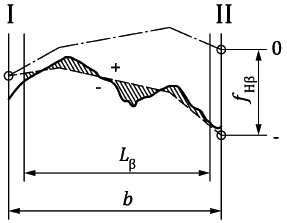
а) Общая погрешность направления зуба | b) Погрешность формы направления зуба | с) Погрешность наклона направления зуба |

Обозначения:
![]() - измеряемое направление зуба;
- измеряемое направление зуба;
![]() - средняя линия направления зуба;
- средняя линия направления зуба;
![]() - точная копия расчетного направления зуба;
- точная копия расчетного направления зуба;
![]() - точная копия средней линии направления зуба
- точная копия средней линии направления зуба
Рисунок 9 - Погрешности направления линии зуба без модификации
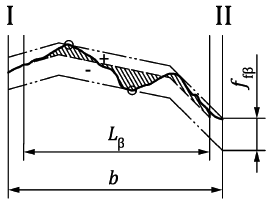
|
|
|
а) Общая погрешность направления зуба | b) Погрешность формы направления зуба | с) Погрешность наклона направления зуба |
См. обозначения к рисунку 9.
Рисунок 10 - Погрешности направления зуба с модификацией угла наклона зуба
|
|
|
а) Общая погрешность направления зуба | b) Погрешность формы направления зуба | с) Погрешность наклона направления зуба |

См. обозначения к рисунку 9.
Рисунок 11 - Погрешности направления зуба с бочкообразной модификацией по направлению
|
|
|
а) Общая погрешность направления зуба | b) Погрешность формы направления зуба | с) Погрешность наклона направления зуба |
См. обозначения к рисунку 9.
Рисунок 12 - Погрешности направления зуба со срезом у торца по направлению зуба
|
|
|
а) Общая погрешность направления зуба | b) Погрешность формы направления зуба | с) Погрешность наклона направления зуба |
См. обозначения к рисунку 9.
Рисунок 13 - Погрешности направления зуба с модификацией угла наклона зуба и со срезом у торца
3.5.2.3 общая погрешность направления зуба : Расстояние между двумя точными копиями расчетного направления зуба (3.5.2.1), ограничивают допускаемые значения погрешности измеряемого направления зуба (3.5.1.1) на диапазоне контроля направления зуба (3.5.1.2).
Примечание 1 - Точные копии расчетного направления зуба параллельны расчетному направлению зуба.
Примечание 2 - См. рисунки 9-13 и 4.4.8.4.
3.5.2.4 погрешность формы направления зуба : Расстояние между двумя точными копиями средней линии направления зуба (3.5.2.2), которые ограничивают допускаемые значения погрешности измеряемого направления зуба (3.5.1.1) на диапазоне контроля направления зуба (3.5.1.2).
Примечание 1 - Точные копии средней линии направления зуба параллельны средней линии направления зуба.
Примечание 2 - См. рисунки 9-13 и 4.4.8.4.
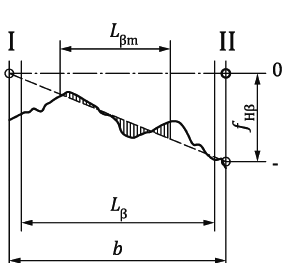
3.5.2.5 погрешность наклона направления зуба : Расстояние между двумя точными копиями расчетного направления зуба (3.5.2.1), которые пересекают экстраполируемую среднюю линию направления зуба (3.5.2.2) в конечных точках ширины зубчатого венца, b.
Примечание 1 - Точные копии расчетного направления параллельны расчетному направлению зуба.
Примечание 2 - См. рисунки 9-13.
Примечание 3 - См. 4.4.8.4 для получения более подробной информации об используемом методе.
4 Применение системы ISO для классификации допусков боковых поверхностей
4.1 Общие положения
Настоящий стандарт содержит классификацию допусков боковых поверхностей и рекомендуемые требования к проведению измерений зубчатых колес в несмонтированном виде.
Некоторые конструкции и прикладные решения могут требовать измерений или документации, как правило, не применяемых при проведении стандартных операций. Подобные требования должны быть отдельно оговорены на договорной основе.
Ни один специальный метод измерения или документация не являются обязательными для выполнения, если это отдельно не согласовано между заводом-изготовителем и покупателем. При необходимости измерений вне рекомендаций настоящего стандарта специальные методы измерения должны быть согласованы до производства зубчатых колес.
Обозначения по 4.6.1 должны быть использованы при определении степени точности по настоящему стандарту, так как прежде у степеней точности были другие значения допусков.
4.2 Контролируемые геометрические параметры
Геометрические параметры зубчатых колес, перечисленные таблице 3, могут быть измерены различными методами. Выбор метода зависит от величины допуска связанной с ним погрешности измерения, размера зубчатого колеса, объемов выпуска, доступного оборудования, точности заготовок зубчатых колес и стоимости измерений. Методы измерения для прямозубых и косозубых зубчатых колес рассмотрены в ISO/TR 10064-1.
Таблица 3 - Параметры и разделы, содержащие определения и значения допусков
Параметр | Описание | Раздел для определения значения допуска | Раздел, содержащий описание |
Основные: | |||
Общая накопленная погрешность шага | 5.3.2 | 3.3.4 | |
Погрешность шага | 5.3.1 | 3.3.2 | |
Общая погрешность профиля | 5.3.3.3 | 3.4.2.3 | |
Погрешность формы профиля | 5.3.3.2 | 3.4.2.4 | |
Погрешность наклона профиля | 5.3.3.1 | 3.4.2.5 | |
Общая погрешность направления зуба | 5.3.4.3 | 3.5.2.3 | |
Погрешность формы направления зуба | 5.3.4.2 | 3.5.2.4 | |
Погрешность наклона направления зуба | 5.3.4.1 | 3.5.2.5 | |
Радиальное биение | E.4 | E.3 | |
Накопленная погрешность шага по сектору | D.5 | D.2 | |
Разность соседних шагов | G.2 | G.1.2 | |
Составные: | |||
Наибольшая однопрофильная кинематическая погрешность зубчатого колеса | F.1.6 | Приложение F | |
Местная однопрофильная кинематическая погрешность | F.1.5 | F.1.5 | |
Размер пятна контакта (см. ISO/TR 10064-4) | - | ||
Размеры: | |||
s | Толщина зуба (см. ISO 21771) | - |
Зубчатое колесо, которому назначена степень точности по ISO, должно отвечать всем отдельным требованиям, предъявляемым к допуску данной степени точности, как отмечено в таблицах 4 и 5.
Таблица 4 содержит минимальный перечень параметров, которые должны быть проконтролированы для обеспечения соответствия настоящему стандарту. По соглашению между заводом-изготовителем и покупателем вместо стандартного может быть использован альтернативный перечень параметров. Выбор между стандартным и альтернативным перечнями зависит от наличия измерительных приборов. При контроле зубчатых колес может быть использован переченями параметров, соответствующий большей точности зубчатого колеса.
Обычно допуски относятся к обеим сторонам зубьев. В некоторых случаях для нагруженной боковой поверхности может быть назначена большая точность, чем для ненагруженной или менее нагруженной боковой поверхности; если возможно, эта информация и признак нагруженной боковой поверхности должны быть обозначены на чертеже зубчатого колеса.
Таблица 4 - Измеряемые параметры
Диаметр, мм | Степень точности | Минимальный перечень параметров | |
Стандартный перечень параметров | Альтернативный перечень параметров | ||
| 10 до 11 |
| s, |
7 до 9 |
| s, | |
1 до 6 |
| s, | |
d>4000 | 7 до 11 |
|
|
Примечания
| |||
Таблица 5 - Минимальное число измерений
Обозначение | Типовой метод измерения | Минимально требуемое число измерений |
Основные: | ||
| Два измерения | Все зубья |
| Два измерения | Все зубья |
Одно измерение | Все зубья | |
| Профиль | Три зуба |
| ||
| Направление зуба | Три зуба |
Составные: | ||
| - | Все зубья |
| - | Все зубья |
| - | Три места |
Размеры: | Измерение по хорде | Три зуба |
s: Толщина зуба | Измерение с помощью роликов | Два места |
Измерение длины общей нормали | Два места | |
Комплексный контроль | Все зубья |
Если не оговорено иное, завод-изготовитель должен выбрать:
- метод измерения из числа применяемых методов, описанных в ISO/TR 10064-1 и приведенных в таблице 5;
- конкретный экземпляр измерительного оборудования, который будет использован для проведения измерения в соответствии с выбранным методом при условии, что данный экземпляр оборудования должным образом откалиброван;
- конкретные зубья, которые будут измерены, при этом они должны быть распределены по возможности равномерно, а их количество должно соответствовать минимальному числу, приведенному в таблице 5.
4.3 Проверка оборудования и погрешности измерения
Чтобы гарантировать единство измерений, оборудование, используемое для измерения зубчатых колес, должно периодически проверяться согласно стандартным процедурам калибровки, таким как ISO 18653. Погрешность в процессе измерения должна быть определена.
4.4 Рекомендации по измерению основных параметров
4.4.1 Общие рекомендации
Перед проведением сравнения результатов измерения основных параметров со значениями допусков необходимо определить эксплуатационные параметры метода измерения, которые включают:
- базовую ось;
- направление измерений;
- направления допусков;
- измерительный диаметр;
- параметры фильтрации данных;
- плотность данных;
- необходимые инструкции по проведению измерения.
В некоторых случаях измерительные инструменты соответствуют стандартным минимальным требованиям. В противном случае требуется, чтобы отличия измерений были известны и скомпенсированы.
Важно различить координатную привязку точек измерения (измерительный диаметр), направление измерения и направление допуска.
4.4.2 Базовая ось
Для назначения расчетного профиля, расчетного направления зуба и шага требуется определить соответствующую справочную ось вращения, называемую базовой осью. Она определяется базовыми поверхностями (см. ISO/TR 10064-3).
4.4.3 Направление измерения
Измерения формы или расположения любой поверхности могут быть проведены в направлении, нормальном к измеряемой поверхности, под некоторым углом или вдоль дуги специально заданной окружности.
В общей метрологической практике размеры измеряются по нормали к измеряемой поверхности. В любой точке поверхности зуба зубчатого колеса вектор нормали расположен:
а) по касательной к основному цилиндру зубчатого колеса;
б) под наклоном к поперечной плоскости на основной угол наклона линии зуба.
Важно понимать, что приборы для измерения зубчатых колес используют различные процедуры для измерения, одни приборы измеряют в направлении нормали, другие могут измерять в другом направлении.
4.4.4 Направление допуска
В настоящем стандарте направление допуска меняется в зависимости от измеряемого основного параметра. Значения начального измерения нужно компенсировать на случай, если фактическое направление измерения и направление допуска, определенное для данного параметра, будут отличаться (см. 4.4.8.2, 4.4.8.4 и 4.4.8.6 для определения соответствия между знаком и результирующим значением).
Направление допуска измерения для всех погрешностей шага находится в поперечной плоскости вдоль дуги измерительного диаметра, ![]() .
.
Направление допуска для профиля и погрешностей направления зуба находится в поперечной плоскости, по линии касательной к основной окружности.
4.4.5 Измерительный диаметр
В настоящем стандарте измерительный диаметр, ![]() (определение термина дано в 3.2.2), используется как координатная привязка точек измерения направления зуба и параметров шага (см. 4.4.3 и 4.4.4). Измерительный диаметр должен быть записан в протоколах приемочного контроля. Так как значения допуска вычисляются по делительному диаметру, то они остаются неизменными при изменении измерительного диаметра.
(определение термина дано в 3.2.2), используется как координатная привязка точек измерения направления зуба и параметров шага (см. 4.4.3 и 4.4.4). Измерительный диаметр должен быть записан в протоколах приемочного контроля. Так как значения допуска вычисляются по делительному диаметру, то они остаются неизменными при изменении измерительного диаметра.
Когда измерительный диаметр не определен, его значение рассчитывают по следующим формулам:
для зубчатых колес внешнего зацепления:
![]() , (1)
, (1)
для зубчатых колес внутреннего зацепления:
![]() , (2)
, (2)
где ![]() - диаметр измерительный, мм;
- диаметр измерительный, мм;
![]() - диаметр вершин зубьев, мм;
- диаметр вершин зубьев, мм;
![]() - модуль нормальный, мм.
- модуль нормальный, мм.
4.4.6 Фильтрация данных измерений
Форма любой реальной боковой поверхности зуба может существенно отклоняться от теоретической формы. Диапазон отклонений может быть очень велик: от таких больших значений, как общая вогнутость, до малых, как, например, шероховатость поверхности.
В настоящем стандарте требуется провести корректировку результатов измерений эвольвентного профиля и направления зуба, чтобы при анализе и сравнении с допусками остались только погрешности больше некоторого предела. Такую корректировку результатов измерений называют низкочастотной фильтрацией. Данная процедура минимизирует или исключает погрешности с длинами волны короче, чем заданная пороговая длина волны фильтра. Пороговая длина волны фильтра, используемая в настоящем стандарте, является порогом фильтра функции формы профиля зубчатого колеса или функции формы направления зубьев зубчатого колеса
(определения этих величин даны в 3.2.3 и 3.2.4). Порог фильтра при измерении формы профиля
должен быть назначен по длине траектории обката. Порог фильтра при измерении направления зубьев
должен быть назначен по ширине зубчатого венца. Рекомендуемый порог фильтра формы может быть вычислен по формулам (3) и (4). Пороговые длины волн фильтра формы больше величин, рассчитанных по этим формулам, не должны использоваться.
![]() , (3)
, (3)
но не меньше чем 0,25 мм;
![]() , (4)
, (4)
но не меньше чем ,
где - порог фильтра при измерении формы профиля, мм;
- порог фильтра при измерении направления зубьев, мм.
Фактический тип фильтра и пороги фильтра формы и
наряду с диаметром головки измерительного щупа должны быть внесены в протоколы приемочного контроля. Для 50% фильтра Гаусса требования и определения даны в ISO/TS 16610-1 и ISO 16610-21.
ПРЕДУПРЕЖДЕНИЕ - В некоторых случаях фильтрация, основанная на значениях пороговой длины волны фильтра формы, рекомендуемой в формулах (3) и (4), может подавить погрешности, определяющие работу зубчатого колеса. Погрешности формы, которые существуют в диапазоне длин волн между рекомендуемым порогом фильтра формы и порогом фильтра, используемым для учета шероховатости поверхности, иногда называют волнистостью поверхности. Когда появляется информация о подобных явлениях, длины волн порога фильтра формы, рассчитанные по формулам (3) и (4), должны быть скорректированы, чтобы оценить такие погрешности формы.
Для получения дополнительной информации смотрите приложение C.
4.4.7 Плотность данных об измерении
Плотность данных об измерении тесно связана с фильтрацией данных измерения вследствие того, что частота выборки данных ограничивает длину волны неровностей поверхности. Число измерительных точек, включенных в контролируемый промежуток, должно быть внесено в протокол приемочного контроля. Массив данных об измерении эвольвентного профиля должен содержать минимум 150 точек, равномерно распределенных вдоль длины траектории обката. Массив данных об измерении направления зуба должен включать минимум ![]() точек. Если требуется проверить волнистость поверхности, то массив данных должен включать минимум 300 точек или 5 точек на миллиметр (принимается большее из этих значений).
точек. Если требуется проверить волнистость поверхности, то массив данных должен включать минимум 300 точек или 5 точек на миллиметр (принимается большее из этих значений).
4.4.8 Необходимые измерения и инструкции по контролю измеряемых параметров
4.4.8.1 Измерение профиля
Измерительный щуп должен пройти вдоль профиля по всей его длине. Измерительный щуп должен быть помещен ниже диаметра начала измерений боковой поверхности на ножке зуба и двигаться до точки начала притупления кромок.
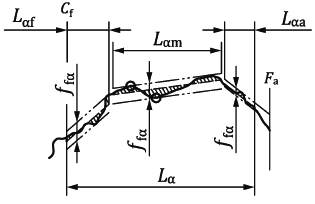
4.4.8.2 Анализ профиля
В пределах диапазона контроля профиля прямолинейный градиент измерения может быть найден с помощью метода наименьших квадратов по отклонениям измеряемого профиля от расчетного профиля. Контроль всегда начинается от диаметра начала измерений боковой поверхности на ножке зуба . Утолщения зуба, находящиеся около вершины вне диапазона контроля профиля, должны быть учтены при расчете погрешности формы профиля
и общей погрешности профиля
. Утонения зуба, находящиеся около вершины вне диапазона контроля профиля, могут быть проигнорированы (см. рисунок 14).
Средняя линия профиля продлевается путем добавления ординат прямолинейного градиента погрешности профиля к ординатам расчетного профиля. Средняя линия профиля используется, чтобы определить [см. рисунки 4 b), 5 b), 6 b), 7 b), 8 b) и 14 b)] и
[см. рисунки 4 c), 5 c), 6 c), 7 c) и 8 c)].
Как для зубчатых колес внутреннего зацепления, так и для зубчатых колес внешнего зацепления погрешность наклона профиля считают положительной, а соответствующую погрешность угла зацепления считают отрицательной, если средняя линия профиля показывает утолщение зуба у его вершины (по сравнению с расчетным профилем).
Профиль контролируется в рамках диапазона контроля профиля, но для определения погрешности наклона профиля результат экстраполируют до диаметра окружности вершин.
4.4.8.3 Измерение направления зуба
Измерительный щуп должен пройти вдоль всей ширины зубчатого венца, от торцевой поверхности до торцевой поверхности или до торцевых фасок, скруглений, или других модификаций (при их наличии).
|
|
а) Общая погрешность профиля | b) Погрешность формы профиля |

Обозначения: | Точки на линии зацепления | ||
| - измеряемый профиль; |
| начала измерений боковой поверхности на ножке зуба; |
| - точная копия расчетного профиля; |
| начала активного профиля на линии зацепления; |
| - средняя линия профиля; |
| начала притупления кромок; |
| - точная копия средней линии профиля | ||
Рисунок 14 - Утолщение зуба при контроле профиля
4.4.8.4 Анализ направления зуба
В пределах диапазона контроля профиля прямолинейный градиент измерения может быть найден с помощью метода наименьших квадратов по отклонениям измеряемого направления зуба от расчетного направления зуба. Погрешности, вызванные утолщением вне диапазона контроля направления зуба должны быть включены в расчет погрешности формы направления зуба, , и полной погрешности направления зуба,
. Утонения вне диапазона контроля направления зуба могут быть проигнорированы (см. рисунок 15).
|
|
а) Общая погрешность направления зуба | b) Погрешность формы направления зуба |
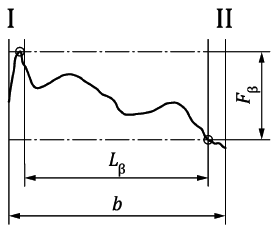
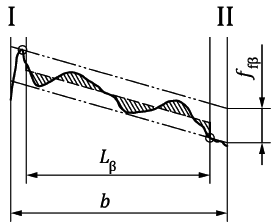
Рисунок 15 - Утолщение зуба при контроле направления зуба
Средняя линия направления зуба продлевается путем добавления ординат прямолинейного градиента погрешности направления зуба к ординатам расчетного направления зуба. Средняя линия направления зуба используется для определения [см. рисунки 9 b), 10 b), 11 b), 12 b), 13 b) и 15 b)] и
[см. рисунки 9 c), 10), 11 c), 12 c) и 13 c)].
Погрешности наклона направления зуба считают положительными, если абсолютные величины углов наклона линии зуба больше, и отрицательными, когда углы наклона линии зуба меньше расчетного угла наклона линии зуба. Погрешности наклона направления зуба прямозубых цилиндрических колес считают + (положительными), если при взгляде с торца погрешность смещается с увеличением расстояния от наблюдателя по часовой стрелке, и - (отрицательными) в противном случае.
4.4.8.5 Координатная привязка точек измерения
Измерения направления зуба должны выполняться на измерительном диаметре. Измерения шага должны выполняться на измерительном диаметре, но только в том случае, если измерения шага не будут использованы для контроля толщины зуба. В подобных случаях шаг, измеренный на измерительном диаметре, должен соответствовать диаметру контакта для выбранного метода контроля (измерение толщины зуба по шарикам или роликам, измерения по окружности или хорде). Делительный диаметр d, должен использоваться для вычисления значений допусков в соответствии с разделом 5 независимо от измерительного диаметра.
4.4.8.6 Отчетные значения погрешности шага
4.4.8.6.1 Функциональная погрешность i-х шагов
Величина со знаком. В случае, когда фактическое положение боковой поверхности зуба ближе к предыдущей боковой поверхности зуба, чем к теоретическому положению, то погрешность рассматривают как отрицательную (-). В случае, когда фактическое положение боковой поверхности зуба дальше от предыдущей боковой поверхности зуба, чем от теоретического положения, то погрешность рассматривают как положительную (+).
4.4.8.6.2 Значения накопленной погрешности i-го шага зубчатого колеса
Беззнаковая величина. Это учитывается в протоколах приемочного контроля как для левых, так и для правых боковых поверхностей.
4.4.8.6.3 Накопленная погрешность i-го шага зубчатого колеса, функциональная
Определяется направлением и алгебраическим знаком. Для определенного направления измерения (по или против часовой стрелки) в случае, если фактическое положение боковой поверхности зуба ближе к базовой боковой поверхности зуба, чем к теоретическому положению, погрешность рассматривают как отрицательную (-), в противном случае - как положительную (+).
4.4.8.6.4 Общая накопленная погрешность шага
Отличительными признаками не являются ни направление, ни алгебраический знак. Такое различие потребовало бы просто произвольного указания направления (по или против часовой стрелки) между двумя зубьями, для которых определяется общая накопленная погрешность шага. Это учитывается в протоколах приемочного контроля как для левых, так и для правых боковых поверхностей.
4.5 Определенные требования по допускам на боковую поверхность зуба
Информация, определяющая требования по допускам на боковые поверхности зуба в чертеже или спецификации зубчатого колеса, должна включать:
- ссылку на настоящий стандарт;
- степень точности допуска на каждый параметр, которая может отличаться для каждого параметра в пределах (в микрометрах), вычисленных в соответствии с настоящим стандартом;
- базовую ось, используемую для измерения (предпочтительнее функциональную базовую ось; см. ISO/TR 10064-3);
- функциональную базовую ось (используемую для контроля);
- измерительный диаметр при отличии от рекомендаций, данных в 4.4.5;
- минимальное число зубьев, которые должны быть проконтролированы, если отличается от рекомендаций, данных в таблице 5;
- форму расчетного профиля и направления зуба или их модификации (в случае необходимости);
- пределы контроля профиля и направления зуба при измерении;
- диаметр начала измерений боковой поверхности на ножке зуба на профиле (определяется диаметром точки Cf (см. рисунок 1), длиной траектории обката или углом обката);
- дополнительные требования к проведению измерений, например толщины зуба (определяется по окружности на делительном диаметре путем измерения длины общей нормали или измеряется по шарикам), диаметр окружности вершин и ножек, профиль переходной кривой, шероховатость поверхности боковой поверхности зуба.
Обычно эту информацию оформляют в виде таблицы.
Конструктор может выбрать диаметр начала измерений боковой поверхности на ножке зуба на профиле, на любом расстоянии между диаметром формирования ножки и диаметром нижних точек активной боковой поверхности. Диаметр формирования ножки может зависеть от диаметра подрезания, точки касания к переходной кривой, или от диаметра основной окружности (выбирается величина наиболее близкая к диаметру окружности вершин). Если диаметр начала измерений боковой поверхности на ножке зуба на профиле не определен, то диаметр окружности нижних точек активных профилей зубьев зубчатого колеса ![]() используется вместо диаметра начала измерений боковой поверхности на ножке зуба на профиле. Если зубчатое колесо входит в зацепление больше чем с одним сопряженным зубчатым колесом, то диаметр нижних точек активной боковой поверхности нужно рассматривать для каждого из этих зубчатых колес при выборе диаметра начала измерений боковой поверхности на ножке зуба на профиле.
используется вместо диаметра начала измерений боковой поверхности на ножке зуба на профиле. Если зубчатое колесо входит в зацепление больше чем с одним сопряженным зубчатым колесом, то диаметр нижних точек активной боковой поверхности нужно рассматривать для каждого из этих зубчатых колес при выборе диаметра начала измерений боковой поверхности на ножке зуба на профиле.
4.6 Критерии приемки и контроля
4.6.1 Назначение степени точности
Обозначение степени точности, соответствующей настоящему стандарту, должно быть следующим:
ISO 1328-1:2013, class A,
где A определяет степень точности.
Примечание - Если год публикации не указан, используется последняя редакция стандарта.
4.6.2 Измененная степень точности
Для зубчатого колеса допустимо использовать различные степени точности для каждого параметра допуска.
4.6.3 Допуски
Допуски для каждого параметра, которые определяются степенью точности зубчатых колес, вычисляются по формулам, приведенным в разделе 5.
4.6.4 Критерии приемки
Допуски, методы и определения, содержащиеся в настоящем стандарте, являются преобладающими, если в договорах, заключенных между заводом-изготовителем и покупателем, не содержится специально оговоренных исключений. Для получения дополнительной информации о погрешностях измерений и о применении определенных допусков смотрите ISO 18653, ISO/TR 10064-5 и ISO 14253-1.
4.6.5 Оценка степени точности
Полная степень точности зубчатого колеса определяется самым большим числом степени точности, указанным для любого параметра допуска, назначенного для зубчатого колеса по настоящему стандарту.
4.6.6 Особенности конструкций
В некоторых конструкциях могут присутствовать особенности, требующие специальных допусков для гарантии удовлетворительных рабочих характеристик. Например, если для конструкции желательны измерения толщины зуба или качества поверхности, то для гарантии нормальной работы в специальных условиях такие требования к подобным изменениям и допуски должны быть указаны в технических требованиях или чертежах. Методы измерения для некоторых подобных случаев приведены в ISO/TR 10064-1 и в приложениях D к G.
4.7 Представление данных
Настоящий стандарт определяет, как конструкция или измеренный профиль отличаются от теоретической эвольвенты с расчетным углом зацепления или как конструкция или измеряемое направление зуба отличаются от теоретического направления зуба с расчетным углом направления зуба. Рисунки показывают профиль и направление зуба в виде горизонтальных линий, является ли боковая поверхность левой или правой, а зубчатое колесо - с внутренним или внешним зацеплением. Большинство измерительных машин отображает профиль и направление зуба в виде вертикальной линии; ориентация линий при этом не важна.
5 Значения допусков
5.1 Общие положения
Значения допусков рассчитываются в микрометрах по формулам (5)-(12), данным в 5.3.
5.2 Использование формул
5.2.1 Область применения
Область применения определена в разделе 1, таким образом, формулы (5)-(12) 5.3 не должны применяться вне пределов области применения. Допуски для зубчатых колес со значениями параметров, находящимися вне указанных диапазонов раздела 1, должны быть согласованы отдельно заводом-изготовителем и покупателем.
5.2.2 Коэффициент шага
Коэффициент шага между двумя последовательными степенями точности равен ![]() . Значения следующей (или предыдущей) степени точности определяются путем умножения (или деления для предыдущей степени точности) на
. Значения следующей (или предыдущей) степени точности определяются путем умножения (или деления для предыдущей степени точности) на ![]() . Искомое значение для любой степени точности может быть определено путем умножения неокругленного расчетного значение для степени точности 5 на
. Искомое значение для любой степени точности может быть определено путем умножения неокругленного расчетного значение для степени точности 5 на ![]() , где A - номер необходимой степени точности.
, где A - номер необходимой степени точности.
5.2.3 Правила округления
Значения, вычисленные по формулам (5)-(12) 5.3, должны округляться следующим образом:
- если значение больше 10 мкм, то результат округляется до ближайшего целого микрометра;
- если значение больше 5 мкм, но меньше 10 мкм, то результат округляется до ближайшего 0,5 микрометра;
- если значение меньше 5 мкм, то результат округляется до ближайшего 0,1 микрометра.
5.3 Формулы для расчета допусков
5.3.1 Допуск на погрешность шага
Допуск на погрешность шага, , должен рассчитываться по формуле:
![]() . (5)
. (5)
5.3.2 Допуск на накопленную погрешность шага зубчатого колеса (по абсолютной величине)
Допуск на накопленную погрешность шага зубчатого колеса (по абсолютной величине) должен рассчитываться по формуле:
![]() . (6)
. (6)
5.3.3 Допуски профиля
5.3.3.1 Допуск на погрешность наклона профиля
Допуск на погрешность наклона профиля должен рассчитываться по формуле (7). Этот допуск может принимать как положительные, так и отрицательные (±) значения.
![]() . (7)
. (7)
5.3.3.2 Допуск на погрешность формы профиля
Допуск на погрешность формы профиля, , должен рассчитываться по формуле:
![]() . (8)
. (8)
5.3.3.3 Допуск на общую погрешность профиля
Допуск на общую погрешность профиля должен рассчитываться по формуле (9), с использованием неокругленных значений допусков на погрешность наклона профиля и на погрешность формы профиля:
![]() . (9)
. (9)
5.3.4 Допуски направления зуба
5.3.4.1 Допуск на погрешность наклона направления зуба
Допуск на погрешность наклона направления зуба следует вычислять по формуле (10). Этот допуск может принимать как положительные, так и отрицательные значения:
![]() . (10)
. (10)
5.3.4.2 Допуск на погрешность формы направления зуба
Допуск на погрешность формы направления зуба вычисляют по формуле (11):
![]() . (11)
. (11)
5.3.4.3 Допуск на общую погрешность направления зуба
Допуск на общую погрешность направления зуба вычисляют по формуле (12), с использованием неокругленных значений допусков на погрешность наклона направления зуба и на погрешность формы направления зуба:
![]() . (12)
. (12)
Приложение А
(обязательное)
Контроль допусков по зонам зуба
A.1 Общие сведения
В этом приложении предложена стратегия использования контроля допусков в отдельных частях или зонах зуба, при условии, что зуб делится на две и более зоны. Например, на профиле зубчатого колеса может быть зона вершины, средняя зона и зона ножки. Смежные зоны рассчитываются отдельно и могут иметь различные степени точности.
A.2 Контроль допусков по зонам профиля зуба
Для определения погрешности наклона и формы профиля необходим расчет регрессии. В случае наличия модификации вершины и ножки профиль может быть разделен на три зоны и каждую зону можно рассмотреть отдельно (см. рисунок А.1).
Для расчета линий регрессии используются только зоны ,
и
. Области между зонами рассматривают только при условии наличия утолщения при определении погрешности формы и полной погрешности. Длина этих областей не может быть нулевой и должна быть определена (кроме тех случаев, когда есть тангенциальный переход). Регрессия вычисляется на основании отклонений от расчетного профиля по сумме наименьших квадратов (метод Гаусса). В большинстве случаев используется линейная регрессия.
A.2.1 Погрешность наклона профиля
Для погрешности наклона профиля линия регрессии средней зоны профиля должна экстраполироваться по области от точки начала измерений боковой поверхности на ножке зуба до вершины [см. рисунок A.2 c)].
A.2.2 Погрешность формы профиля
Погрешность формы профиля - это расстояние между двумя точными копиями линий регрессии, которые ограничивают измеряемый профиль по зоне. Для каждой зоны погрешность формы определяется независимо. Для области, которая находится за точкой притупления, утолщения включаются в смежную зону [см. рисунок A.2 b)].
Примечание - точные копии линии регрессии параллельны линии регрессии.
|
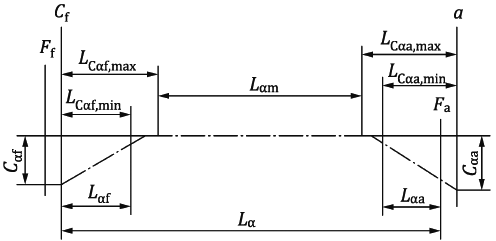
- утонения головки зуба при С-модификации;
- утонения ножки зуба при С-модификации;
- средняя зона профиля;
![]() - модификации головки зубьев, максимальная длина;
- модификации головки зубьев, максимальная длина; ![]() - модификации головки зубьев, минимальная длина;
- модификации головки зубьев, минимальная длина; ![]() - модификации ножки зубьев, максимальная длина;
- модификации ножки зубьев, максимальная длина; ![]() - модификации ножки зубьев, минимальная длина;
- модификации ножки зубьев, минимальная длина; - зона модификации головки профиля;
- зона модификации ножки профиля;
Точки на линии зацепления
а - вершина; ![]() - начала измерений боковой поверхности на ножке зуба;
- начала измерений боковой поверхности на ножке зуба; ![]() - начало притупления кромок;
- начало притупления кромок; ![]() - впадина
- впадина
Рисунок A.1 - Зоны регрессии для профиля с модификациями головки и ножки
|
|
|
а) Общая погрешность профиля | b) Погрешность формы профиля | с) Погрешность наклона профиля |
Обозначения: | Точки на линии зацепления | ||
| - измеряемый профиль; |
| начала измерений боковой поверхности на ножке зуба; |
| - точная копия расчетного профиля; |
| начала активного профиля на линии зацепления; |
| - средняя линия профиля; |
| начала притупления кромок; |
| - точная копия средней линии профиля | а - | вершина |
Рисунок A.2 - Контроль по зонам профиля с модификациями головки и ножки
A.2.3 Общая погрешность профиля
Общая погрешность профиля - это расстояние между двумя точными копиями расчетного профиля, которые охватывают фактический профиль, как показано на рисунке 2a). Следует также учитывать утолщения, находящиеся у вершины, даже в том случае, если они вне диапазона контроля.
Примечание 1 - Точные копии расчетного профиля параллельны расчетному профилю.
Примечание 2 - Обычной практикой является ограничение контроля средней зоны или ее полное исключение из .
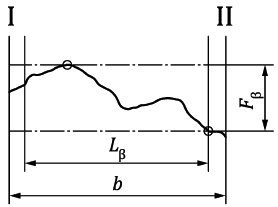
A.3 Контроль допусков по зонам направления зуба
Для определения погрешностей наклона и формы необходимо выполнить расчет регрессии. В случае наличия срезов у торца зубьев зубчатого колеса образуется несколько зон, при этом каждую зону рассматривают отдельно. Области, близкие к торцам, обозначаются I и II (см. рисунок 3).
|
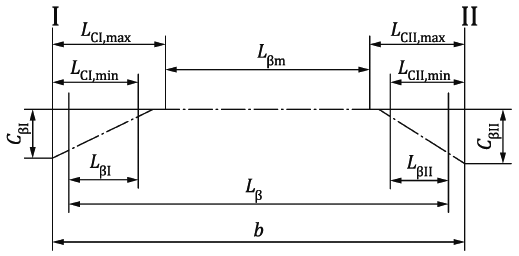
I - базовый торец; II - не базовый торец; - значение от среза торца;
- значение от среза торца;
![]() - максимальная длина от среза торца;
- максимальная длина от среза торца; ![]() - минимальная длина от среза торца;
- минимальная длина от среза торца; ![]() - максимальная длина от среза торца;
- максимальная длина от среза торца; ![]() - минимальная длина от среза торца;
- минимальная длина от среза торца; - зона среза торца;
- средняя зона направления линии зуба;
- зона среза торца
Рисунок A.3 - Зоны регрессии для направления зуба зубчатого колеса со срезом торцов с обеих сторон
Для расчета линий регрессии используются только зоны ,
и
. Области между зонами рассматривают только при наличии утолщения при определении погрешности формы и полной погрешности. Длина этих областей не может быть нулевой и должна быть определена (кроме тех случаев, когда есть тангенциальный переход). Регрессия вычисляется на основании отклонений от расчетного направления зуба по сумме наименьших квадратов (метод Гаусса). В большинстве случаев используется линейная регрессия.
A.3.1 Погрешность наклона направления зуба
Для погрешности наклона направления зуба линия регрессии средней зоны должна экстраполироваться на всю ширину зубчатого венца b [см. рисунок A.4 c)].
|
|
|
а) Общая погрешность направления зуба | b) Погрешность формы направления зуба | с) Погрешность наклона направления зуба |
Обозначения: |
| зона среза торца (базовый торец); | |
| - измеряемое направление зуба; |
| зона среза торца (не базовый торец); |
| - точная копия расчетного направления зуба; |
| средняя зона направления зуба |
| - средняя линия направления зуба; | ||
| - точная копия средней линии направления зуба | ||
Рисунок A.4 - Контроль направления зуба со срезанными торцами с обеих сторон
A.3.2 Погрешность формы направления зуба
Погрешность формы направления зуба - это расстояние между двумя точными копиями направления зуба, которые ограничивают измеряемое направление в зоне. Для каждой зоны погрешность формы определятся независимо [см. рисунок A.4 b)]. Любое утолщение, находящееся между зонами и у торца, должно учитываться при определении данного параметра.
Примечание - Точные копии линии регрессии параллельны линии регрессии.
A.3.3 Общая погрешность направления зуба
Общая погрешность направления зуба - это расстояние между двумя точными копиями расчетного направления зуба, охватывающие действительное направление зуба [см. рисунок A.4 a)]. Утолщения, располагающиеся у торцов боковых поверхностей, должны учитываться даже если они находятся вне диапазона контроля
.
Примечание 1 - Точные копии расчетного направления зуба параллельны направлению зуба.
Примечание 2 - Обычной практикой является ограничение контроля средней зоны или ее полное исключение из .
Приложение В
(обязательное)
Аналитический метод контроля погрешностей профиля и направления зуба, выполненных по кривым второго порядка
B.1 Цель
Это приложение применимо к зубчатым колесам с бочкообразным профилем, бочкообразным направлением зуба или обоими модификациями. Второй порядок прекрасно сглаживает погрешности немодифицированного профиля или немодифицированного направления зуба. Для этого метода анализа могут использоваться стандартные степени точности из раздела 5.
Примечание - Разделы 3 и 4 используют линейный анализ отклонений от расчетного профиля и расчетного направления зуба, а не сглаживание второго порядка. Результат линейного анализа упоминается как линия среднего профиля (или направления зуба), даже учитывая то, что она имеет такую же форму, как и расчетный профиль (или расчетное направление зуба), которые могут иметь вид кривой. Результат анализа второго порядка, выполненный по этому приложению, всегда упоминается как кривая.
B.2 Анализ профиля второго порядка
Бочкообразность - часто используемая и эффективная модификация профиля для некоторых конструкций. Бочкообразность определяется параболической кривой (см. рисунок B.1). Расчет параболы выполняется в пределах , но для контроля параметров
и
парабола экстраполируется до диаметра окружности вершины для конструкций, когда не применяется контроль по зонам, или до конца зоны, когда анализируются зоны на профиле зуба.
B.2.1 Средняя кривая профиля второго порядка
Средняя кривая профиля второго порядка - кривая, созданная, путем математического сглаживания кривой второго порядка линии измерения профиля в оценочном диапазоне профиля методом наименьших квадратов.
Примечание - Эта кривая является основой для определения параметров ,
и
.
|
Обозначения:
![]() - эвольвента;
- эвольвента;
![]() - бочкообразность профиля
- бочкообразность профиля
Рисунок B.1 - Бочкооборазность профиля
B.2.2 Погрешность формы профиля
Погрешность формы профиля - это расстояние между двумя точными копиями средней кривой профиля второго порядка, каждая из которых размещается на некотором равноудаленном расстоянии от средней кривой профиля второго порядка, таким образом, чтобы ограничить допускаемые погрешности измеряемого профиля на оценочном диапазоне профиля
[см. 3.3.10 и рисунок B.2 а)]. Смотрите 4.4.8.2 для получения дополнительной информации об утолщениях профиля.
B.2.3 Погрешность наклона профиля
Погрешность наклона профиля - это смещение, определенное в точках, где экстраполируемая средняя кривая профиля второго порядка пересекает диаметр начала измерений боковой поверхности на ножке зуба на профиле и диаметр вершины [см. рисунок B.2 b)].
Алгебраический знак погрешности наклона профиля при использовании метода второго порядка определяется, как и в 4.4.8.2.
Если есть погрешность наклона расчетного профиля, , первоначально расчетный параметр
используется при определении погрешности наклона профиля согласно формуле (B.1):
![]() . (B.1)
. (B.1)
B.2.4 Бочкообразность профиля
Бочкообразность профиля - это расстояние, измеренное в направлении погрешности между хордой экстраполируемой средней кривой профиля второго порядка до точек пересечения диаметра начала измерений боковой поверхности на ножке зуба и диаметра вершины, и параллельной линией, которая является касательной к средней кривой профиля второго порядка [см. рисунок B.2 c)].
|
|
|
а) Погрешность формы профиля | b) Погрешность наклона профиля | с) Бочкообразность профиля |
Обозначения: | Точки на линии зацепления | ||
| - измеряемый профиль; |
| начала измерений боковой поверхности на ножке зуба; |
| - средняя кривая профиля второго порядка; |
| стартовая точка диаметра нижних точек активной боковой поверхности; |
| - точная копия средней кривой профиля второго порядка; |
| начала притупления кромок; |
| - хорда к средней кривой профиля второго порядка | а - | вершина |
Рисунок B.2 - Погрешности профиля второго порядка
B.3 Анализ направления зуба второго порядка
Подобно бочкообразности профиля, бочкообразность направления зуба - часто используемая модификация. Эта модификация определяется одной параболической кривой, которая увеличивает искривление направления зуба в середине диапазона контроля направления зуба, . Расчет параметров параболы выполняется в пределах
, но для оценки
и
парабола экстраполируется до полной ширины зубчатого венца b тогда, когда не применяется контроль по зонам, или до конца зоны, когда анализируются зоны на профиле зуба.
B.3.1 Средняя кривая направления зуба второго порядка
Средняя кривая направления зуба второго порядка - это кривая, которая создана математически сглаженными кривыми второго порядка по измеряемому направлению зуба, в пределах диапазона контроля направления зуба методом наименьших квадратов.
Примечание - Эта кривая служит основой для определения ,
и
.
B.3.2 Погрешность формы направления зуба
Погрешность формы направления зуба - это расстояние между двумя точными копиями средней кривой направления зуба второго порядка, которые размещаются на равном расстоянии от средней кривой направления зуба второго порядка, чтобы ограничить погрешность измеряемого направления зуба в рамках диапазона контроля направления зуба
[см. рисунок B.3 а)]. Смотрите 4.4.8.4 для получения дополнительной информации об утолщениях.
B.3.3 Погрешность наклона направления зуба
Погрешность наклона направления зуба - это смещение, определяемое в точках, где средняя кривая направления зуба второго порядка пересекает конечные точки ширины зубчатого венца b [см. рисунок Б.* 3b)].
________________
* Нумерация соответствует оригиналу. - .
Алгебраические знаки погрешности наклона направления зуба, , при использовании метода второго порядка определяются так же, как и в 4.4.8.4.
Если есть погрешность наклона расчетного направления зуба , первоначально рассчитанный
используется при определении погрешности наклона направления зуба по формуле:
![]() . (В.2)
. (В.2)
Б.3.4* Бочкообразность направления зуба
________________
* Нумерация соответствует оригиналу. - .
Бочкообразность направления зуба - это расстояние, измеренное в направлении погрешности между линией наклона линии направления зуба и параллельной линией, являющейся касательной к средней кривой линии направления зуба второго порядка [см. рисунок B.3 c)].
|
|
|
а) Погрешность формы направления зуба | b) Погрешность наклона направления зуба | с) Бочкообразность направления зуба |
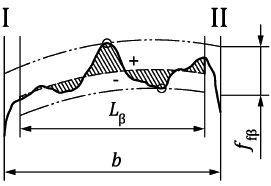
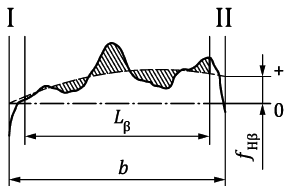
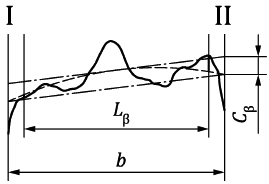
Обозначения:
![]() - измеряемое направление зуба;
- измеряемое направление зуба;
![]() - средняя кривая направления зуба;
- средняя кривая направления зуба;
![]() - точная копия средней кривой направления зуба
- точная копия средней кривой направления зуба
Рисунок B.3 - Погрешности кривой направления зуба второго порядка
Приложение С
(справочное)
Фильтрация данных об измерении профиля и направления зуба
С.1 Цель
Данные об измерении профиля и направления зуба перед дальнейшим анализом обычно проходят через низкочастотный фильтр. Выбранный метод фильтрации и пороговая длина волны влияют на результаты анализа. Это приложение содержит инструкции к проведению фильтрации.
С.2 Фильтрация
Измерения содержат множество различных вариаций длин волн или частот. Исключение определенных частей спектра частоты данных об измерении называют фильтрацией. Фильтр, который исключает короткую длину волны (высокую частоту) данных, называют низкочастотным фильтром. Фильтр, который исключает длинную длину волны (низкую частоту) данных, называют фильтром верхних частот. Фильтр, который исключает самые короткие и самые длинные длины волны (самые высокие и самые низкие частоты), оставляя только среднюю длину волны (среднюю частоту) данных, называют полосовым фильтром. В метрологических целях при измерении зубчатых колес обычно применяется низкочастотный фильтр, чтобы исключить влияние высокочастотных данных о качестве поверхности из анализа общей погрешности, погрешности формы и наклона профиля и направления зуба. В системе измерения зубчатого колеса обычно присутствует несколько типов фильтрации.
С.3 Механическая фильтрация
Механическая фильтрация ограничивает данные об измерении профиля и направления зуба до больших значений длин волн, являясь, таким образом, низкочастотным фильтром. Механическая фильтрация следует из геометрии измерительного моста датчика (то есть радиуса наконечника измерительного щупа), вследствие чего подавляются более короткие длины волн. Другой источник механической низкочастотной фильтрации - инерционная масса движущейся части измерительной системы с датчиком касания.
В случае когда требуется учесть более высокие частоты данных, можно использовать меньшие радиусы наконечника щупа. Так как данные о профиле и направлении зуба зубчатого колеса обычно подвергаются намеренной низкочастотной фильтрации, это редко требуется. Оценка качества поверхности зубчатого колеса лучше всего достигается при использовании специализированных инструментов контроля качества поверхности, а не средствами измерения профиля или направления зуба.
С.4 Электрическая фильтрация
Электрическая фильтрация ограничивает данные об измерении значениями с большей длиной волны (понижает частоту) и является низкочастотным фильтром. Во время электрической фильтрации данные измерительных сигналов проходят от головки измерительного щупа до схемы электрической фильтрации (RC) схемы, а затем - на устройства анализа данных и вывода результата. Электрические схемы фильтрации данных измерения профиля и направления зуба сконструированы так, чтобы достигнуть устранения высокочастотных данных об измерении по заранее заданной длине волны, называемой пороговой. Все данные о частотах значительно выше, чем пороговая частота, исключаются. Высокочастотные измерительные данные, которые находятся вблизи, но точно не равны пороговой частоте, фильтруются пропорционально их близости к пороговой длине волны.
Негативный эффект при электрической RC-фильтрации - перемена фазы данных, которая может повлиять на анализ результатов измерения.
С электрической фильтрацией можно столкнуться на достаточно старых инструментах, новые инструменты используют математическую фильтрацию. Электрическая фильтрация - приемлемая практика, если понятны ее ограничения.
С.5 Математическая фильтрация
Математическая фильтрация требуется для преобразования измерительных данных из аналоговой в цифровую форму, которая может быть обработана компьютером. Сегодня доступно много математических фильтров. Один общий фильтр подражает особенностям электрических фильтров (с или без особенности перемены фазы RC-схем). Другой общий фильтр использует Гауссову математику.
Особенности передачи фазовой коррекции Гауссова фильтра таковы, что 50% амплитуды синусоидального сигнала с длиной волны, равной пороговой длине волны, будут переданы. Другие частоты пропускаются в зависимости от их близости к пороговой частоте. Когда используется фазовая коррекция с помощью фильтра Гаусса, неточность уменьшается, а фазовый сдвиг устраняется.
Вследствие особенностей передачи амплитуды синусоидальной волны и в соответствии со стандартами ISO требуется использовать цифровой 50%-ный фильтр Гаусса (см. 4.4.6).
Также может иметь смысл рассмотрение измерительных данных различными видами математической фильтрации.
С.6 Выбор порога (отсечки)
Стандартные пороговые значения для профиля и направления зуба, используемые в настоящем стандарте, указаны в 4.4.6.
Приложение D
(справочное)
Накопленная погрешность шага по сектору
D.1 Цель
В этом приложении содержатся определение, инструкции по проведению измерения, рекомендуемые значения допусков и руководство по применению погрешности шага сектора.
D.2 Накопленная погрешность шага по сектору ![]() ,
, ![]()
Накопленная погрешность шага по сектору ![]() представляет собой наибольшую алгебраическую разность между значениями накопленной функциональной погрешности i-го шага зубчатого колеса, определенную для некоторой боковой поверхности в пределах любого сектора из k шагов. Для частного случая, где k является одной восьмой числа зубьев z, этот параметр обозначают
представляет собой наибольшую алгебраическую разность между значениями накопленной функциональной погрешности i-го шага зубчатого колеса, определенную для некоторой боковой поверхности в пределах любого сектора из k шагов. Для частного случая, где k является одной восьмой числа зубьев z, этот параметр обозначают ![]() .
.
Примечание 1 - Если не указано иное, k равен одной восьмой числа зубьев. Для зубчатых секторов число зубьев z равно числу зубьев полного зубчатого колеса, а не числу зубьев в зубчатом секторе.
Примечание 2 - Когда известно число зубьев в секторе, то оно указывается в обозначении вместо k; то есть для сектора из четырех зубьев используется обозначение .
Примечание 3 - Для :
![]() , (D.1)
, (D.1)
где k - число шагов в секторе, округленное до ближайшего целого;
z - число зубьев.
Минимальное значение k равно 2. Параметр ![]() применим только для зубчатых колес с числом зубьев 12 и более.
применим только для зубчатых колес с числом зубьев 12 и более.
Величина со знаком. В том случае, когда расстояние между рассматриваемыми двумя зубьями, включающими накопленную погрешность шага по сектору, меньше, чем теоретическое расстояние, то погрешность рассматривают как отрицательную (-). Если расстояние между рассматриваемыми двумя зубьями, включающими накопленную погрешность шага по сектору, больше, чем теоретическое расстояние, то погрешность рассматривают как положительную (+).
Направление измерения для накопленной погрешности шага по сектору проводят по дуге измерительного диаметра (![]() ) в пределах поперечной плоскости.
) в пределах поперечной плоскости.
D.3 Практика измерения
Для определения накопленной погрешности шага по сектору могут использоваться координаты зубьев, полученные или с помощью устройства компаратора шага (с двумя измерительными щупами), или с помощью индексирующего устройства (единственный измерительный щуп). Независимо от способа на первом этапе требуется определить значения накопленной функциональной погрешности i-го шага зубчатого колеса. Чтобы определить накопленную погрешность шага по сектору ![]() , необходимо алгебраически вычесть из наибольшего положительного значения накопленной функциональной погрешности i-го шага зубчатого колеса самое отрицательное значение накопленной функциональной погрешности i-го шага зубчатого колеса в пределах каждой группы k шагов (k+1 смежных зубьев), как указано в разделе D.2. Накопленная погрешность шага по сектору
, необходимо алгебраически вычесть из наибольшего положительного значения накопленной функциональной погрешности i-го шага зубчатого колеса самое отрицательное значение накопленной функциональной погрешности i-го шага зубчатого колеса в пределах каждой группы k шагов (k+1 смежных зубьев), как указано в разделе D.2. Накопленная погрешность шага по сектору ![]() равна самому большому из полученных значений. Существует столько групп k шагов, сколько и зубьев.
равна самому большому из полученных значений. Существует столько групп k шагов, сколько и зубьев.
D.4 Сравнение с подобными параметрами
Важно понимать, что параметр ![]() не эквивалентен другим подобным параметрам, таким как накопленная погрешность k шагов
не эквивалентен другим подобным параметрам, таким как накопленная погрешность k шагов ![]() . Накопленная погрешность k шагов равна алгебраической разности между первым и последним значениями накопленной функциональной погрешности i-го шага зубчатого колеса (погрешность индекса) в секторе k шагов.
. Накопленная погрешность k шагов равна алгебраической разности между первым и последним значениями накопленной функциональной погрешности i-го шага зубчатого колеса (погрешность индекса) в секторе k шагов.
В обоих случаях используется интервал из k промежутков. Для ![]() используется интервал длины k (максимальное показание минус минимальное показание), который определяется для каждого интервала для всех значений в интервале.
используется интервал длины k (максимальное показание минус минимальное показание), который определяется для каждого интервала для всех значений в интервале.
Для ![]() число интервалов равно ближайшему целому числу z/k. Для каждого интервала только первое и последнее значения определяют разность.
число интервалов равно ближайшему целому числу z/k. Для каждого интервала только первое и последнее значения определяют разность.
Примечание - допуск для не определен в настоящем стандарте.
Пример отличия между этими аналитическими методами показан на рисунке D.1. На рисунке показана накопленная функциональная погрешность i-го шага зубчатого колеса (данные указаны для зубчатого колеса с 35 зубьями), таким образом, для ![]() значение k равно 4. В этом примере значение накопленной погрешности шага по сектору
значение k равно 4. В этом примере значение накопленной погрешности шага по сектору ![]() , равное 4,7, появляется между зубьями 18 и 20, которые содержатся в пределах сектора из 4 шагов. Значение накопленной погрешности k шагов
, равное 4,7, появляется между зубьями 18 и 20, которые содержатся в пределах сектора из 4 шагов. Значение накопленной погрешности k шагов ![]() , равное 4,1, появляется от зуба 18 до 22, которые являются 4 отдельными шагами. В этом примере
, равное 4,1, появляется от зуба 18 до 22, которые являются 4 отдельными шагами. В этом примере ![]() и
и ![]() находятся в одном и том же секторе, но так бывает не всегда.
находятся в одном и том же секторе, но так бывает не всегда.
|
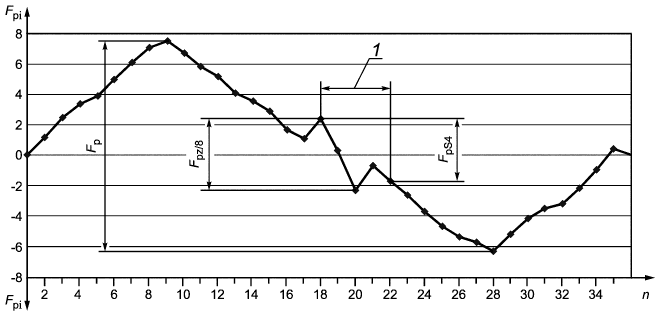
1-4 шага сектора с самой большой зубной погрешностью; n - номер зуба; ![]() - общая накопленная погрешность шага;
- общая накопленная погрешность шага; ![]() - накопленная погрешность шага по сектору (z/8
- накопленная погрешность шага по сектору (z/84);
![]() - накопленная погрешность k шагов, 4 зуба
- накопленная погрешность k шагов, 4 зуба
Рисунок D.1 - Накопленная погрешность шага по сектору и накопленная погрешность k шагов
D.5 Допуск на накопленную погрешность шага по сектору ![]()
Рекомендуемое значение допуска на накопленную погрешность шага по сектору ![]() рассчитывают по формуле (D.2)
рассчитывают по формуле (D.2)
![]() , (D.2)
, (D.2)
где ![]() - допуск на накопленную погрешность шага по сектору;
- допуск на накопленную погрешность шага по сектору;
![]() - допуск на погрешность шага класса точности A.
- допуск на погрешность шага класса точности A.
Рекомендуемая область применения для допуска шага сектора соответствует тем же ограничениям, которые определены на допуск накопленной погрешности шага зубчатого колеса ![]() (по абсолютной величине).
(по абсолютной величине).
В определенных случаях формула (D.2) для ![]() может быть упрощена:
может быть упрощена:
![]() . (D.3)
. (D.3)
D.6. Руководство по применению
Измерение накопленной погрешности z/8 шагов не является обязательным (если это отдельно не оговорено), поэтому информация, имеющая отношение к этому параметру, не была включена в основной текст настоящего стандарта.
В случае договоренности между заводом-изготовителем и покупателем этот метод может использоваться в следующих случаях:
- если разности между накопленными функциональными погрешностями i-го шага зубчатого колеса для относительно небольшого числа шагов являются слишком большими;
- если во время работы зубчатого колеса возникают существенные ускоряющие силы;
- для высокоскоростных зубчатых колес, в которых могут возникать значительные динамические нагрузки.
Приложение Е
(обязательное)
Допустимое значение биения
E.1 Цель
Приложение содержит формулы для расчета допуска и диапазон применения.
E.2 Размер по шарикам или роликам
Размер по шарикам или роликам представляет собой радиальное расстояние от оси зубчатого колеса до центра или другого заданного положения измерительного щупа (шарик или ролик), который помещается последовательно в каждую впадину зубчатого венца. Во время каждой проверки измерительный щуп контактирует одновременно с правой и левой боковой поверхностью приблизительно в середине высоты зуба.
Биение может быть определено на основании точек, полученных при измерении шага (см. рисунки E.5 и E.2).
Примечание 1 - Существует столько значений , сколько впадин между зубьями.
Примечание 2 - Результаты физического измерения обычно дают результат, немного отличающийся от вычисленного по измеренным шагам.
Когда для измерения радиального биения потребуется определенный диаметр шарика, и в том случае, если данные измерения шага будут использоваться при расчете радиального биения, диаметр контакта для этого шарика должен использоваться при измерений шага. В противном случае должен использоваться измерительный диаметр ![]() .
.
E.3 Радиальное биение ![]()
Значение биения зубчатого колеса ![]() является разностью между максимальным и минимальным функциональным размером по шарикам или роликам
является разностью между максимальным и минимальным функциональным размером по шарикам или роликам . Рисунок E.1 показывает пример схемы биения, в которой эксцентриситет - часть биения (см. ISO/TR 10064-2).
|
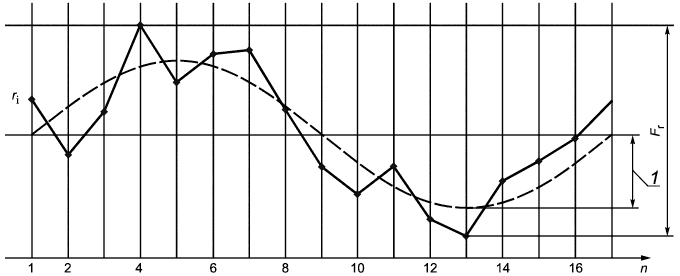
1 - эксцентриситет; n - номер впадины зуба
Рисунок E.1 - Диаграмма радиального биения для зубчатого колеса с 16 зубьями
E.4 Рекомендуемая формула для расчета допуска на радиальное биение ![]()
Допуск на радиальное биение, ![]() , рассчитывается по формуле:
, рассчитывается по формуле:
![]() , (E.1)
, (E.1)
где область применения ограничена следующим образом:
степень точности от 1 до 11;
51000;
5 мм15000 мм;
0,5 мм![]() 70 мм.
70 мм.
E.5 Расчет радиального биения по измерениям шага
По измерениям на измерительном диаметре известны положения левых и правых боковых поверхностей. В поперечной плоскости эвольвенты образуются во впадинах зуба от измеренных точек на расстоянии, равном радиусу шарика, разделенного на косинус основного угла наклона зуба. Расстояние измеряется в направлении вдоль касательной к основной окружности. Пересечение этих двух эвольвент для каждой впадины зубчатого венца дает приблизительное радиальное положение центра измерительного шарика. Эти положения могут также использоваться для проведения измерения по шарикам. Результаты могут немного отличаться от фактических измерений, сделанных шариком, контактирующим с двумя боковыми поверхностями, из-за разностей в размещении контакта и неровностях поверхности. См. рисунок E.2, на котором показан упрощенный пример для прямозубого цилиндрического колеса.
|
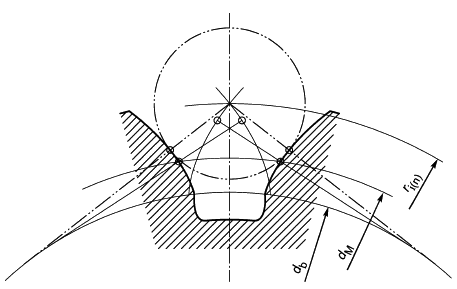
Рисунок E.2 - Радиальное биение по измеренному шагу
E.6 Руководство по применению
Измерение радиального биения не является обязательным (если это отдельно не оговорено), по этой причине информация, имеющая отношение к этому параметру, не была включена в основной текст настоящего стандарта. Тем не менее по договоренности между заводом-изготовителем и покупателем этот метод может использоваться.
Приложение F
(справочное)
Комплексный контроль по одной боковой поверхности зуба
F.1 Цель
F.1.1 Общие положения
В этом приложении рассмотрена кинематическая погрешность и дано стандартное значение допуска на однопрофильную кинематическую погрешность зацепления зубьев (, расчетную). Кинематическая погрешность - это отклонение углового положения ведомого зубчатого колеса для данного углового положения ведущего зубчатого колеса от положения, которое заняло бы ведомое зубчатое колесо, если бы зубчатые колеса были геометрически идеальны.
Контроль по одной боковой поверхности зуба - метод, используемый при измерении кинематической погрешности. Как правило, он осуществляется с помощью инструментов, контролирующих пару зубчатых колес. Время от времени также проводится контроль зубчатых колес в паре с эталонным зубчатым колесом для измерения вклада отдельного зубчатого колеса в кинематическую погрешность. Эти тесты обычно проводятся при очень малых нагрузках, чтобы избежать влияния аппаратуры на результаты измерений. Тестирование под большой нагрузкой, сопоставимой с эксплуатационной нагрузкой, должно проводиться в конкретной коробке скоростей или на очень жестком испытательном стенде, но подобное тестирование выходит за рамки данного приложения.
При контроле по одной боковой поверхности зуба зубчатые колеса прокатывают на определенном расстоянии между их центрами, при этом в контакте должна находиться только одна боковая поверхность. У зубчатой пары должен быть предусмотрен боковой зазор. Поскольку контроль по одной боковой поверхности зуба зубчатых колес моделирует их работу, погрешности зубчатой пары, обнаруженной этим тестом, полезны для контроля функциональных особенностей зубчатых передач. Также при этом контроле могут быть обнаружены царапины и неровности.
Контроль по одной боковой поверхности зуба показывает общую и местную кинематическую погрешность холостого хода. Местная кинематическая погрешность - важный параметр, влияющий на плавность движения или на шум и вибрацию. Когда рассматривают допуски для общей кинематической погрешности холостого хода, тогда накопленная погрешность шага учитывается как главный источник. При анализе местной кинематической погрешности сопряжение зубьев учитывается как главный источник.
Есть две группы типов зубчатых колес, которые рассматривают при назначении допусков для местной кинематической погрешности холостого хода: форма зуба без модификации и модифицированная форма зуба.
F.1.2 Форма зуба без модификации
Немодифицированные формы зубьев используются во многих случаях, например в бытовых приборах, автоматических ручных инструментах, автомобильных приводах агрегатов, а также в приборах, которые работают при очень низких нагрузках. Чем ниже нагрузка, чем больше сопрягается зубьев, тем более гладко они работают и тем меньше производят шума и вибрации. Поэтому любой результат меньше значения допуска является приемлемым.
F.1.3 Модифицированные формы зубьев
Модифицированная форма зубьев (бочкообразность профиля, модификация профиля головки, наклон профиля и т.д.) могут показать относительно высокую местную кинематическую погрешность. Это связано с тем, что они контролируются при легких нагрузках, в то время как зубья были сконструированы, чтобы обеспечить сопряжение при определенной высокой нагрузке. Поэтому зубья не сопрягаются при низких нагрузках, для которых осуществляется контроль. Если местная кинематическая погрешность намного меньше, чем ожидается, то результат работы зубчатых передач под нагрузкой также не будет удовлетворительным. Поэтому для модифицированных форм зубьев должны быть заданы максимальные и минимальные допуски.
Есть два альтернативных метода, чтобы определить эти максимальные и минимальные допуски:
a) основанный на опыте реальных конструкций;
b) с помощью компьютерных программ анализа пятна контакта, которые определяют форму зуба и предсказывают кривые кинематической погрешности.
Эти программы анализируют форму зуба так, как если бы происходила работа под нагрузкой, также они могут предсказывать местную кинематическую погрешность на различных уровнях нагрузки, в том числе ту, которую можно увидеть на приборе контроля по одной боковой поверхности при легкой нагрузке.
F.1.4 Метод A
Метод определения расчетного и производственного значений составляющей средней однопрофильной кинетической погрешности зубчатого зацепления разработан с использованием экспериментального опыта и тестирования нагрузочной погрешности для определения требуемого значения. Эти значения не зависят от степени точности.
F.1.5 Метод B
Амплитуда полного размаха краткосрочного компонента однопрофильной кинематической погрешности (высокочастотная фильтрация) используется, чтобы определить компонент зацепления зубьев. Самая высокая амплитуда полного размаха не должна быть больше, чем ![]() , а самая низкая амплитуда полного размаха не должна быть меньше, чем
, а самая низкая амплитуда полного размаха не должна быть меньше, чем ![]() . Амплитуда полного размаха - разность между самой высокой точкой и самой низкой точкой кривой движения в пределах одного шага измеряемого набора колес.
. Амплитуда полного размаха - разность между самой высокой точкой и самой низкой точкой кривой движения в пределах одного шага измеряемого набора колес.
Максимальные и минимальные значения допуска местной однопрофильной кинематической погрешности зубчатого колеса, компонента зацепления зубьев , для зубчатой пары должны быть вычислены согласно формулам F.1 и F.2 или F.1 и F.3, в микрометрах.
![]() . (F.1)
. (F.1)
Значение ![]() должно быть большим, из:
должно быть большим, из:
![]() , (F.2)
, (F.2)
или
![]() , (F.3)
, (F.3)
область применения ограничена следующим образом:
степень точности от 1 до 11;
1,0 мм![]() 50 мм;
50 мм;
5400;
5 мм2500 мм.
Если измерительный прибор считает в единицах измерения угла, то преобразование в микрометры выполняется на делительный диаметр d.
(микрорадианы)=2000
(микрометры)/d (мм).
Расчетное значение для однопрофильной кинематической погрешности компонента зацепления зубьев (расчетное), для формул F.1 и F.2, должен быть определено с учетом анализа условий испытания и условий измерения. Необходимо уделить внимание выбору расчетного значения таким образом, чтобы оно включало влияние таких факторов, как погрешность монтажа, изменчивость формы боковой поверхности и применяемых рабочих нагрузок. Смотрите F.2 для получения дополнительной информации.
F.1.6 Общая однопрофильная кинематическая погрешность зубчатого колеса, допуск
Допуск на общую однопрофильную кинематическую погрешность, , должен быть рассчитан по формуле:
![]() , (F.4)
, (F.4)
где область применения ограничена следующим образом, если определен:
степень точности от 1 до 11;
1,0 мм![]() 50 мм;
50 мм;
5400;
5 мм2500 мм.
F.2 Структура испытательного прибора и полученных данных
На рисунке F.1 показано схематическое изображение измерительного прибора для контроля по одной боковой поверхности зуба. Углы поворота ![]() и
и ![]() определяются датчиком углового вращения, таким как измерительный преобразователь вращательного движения, прикрепленный к валу зубчатого колеса и шестерне. Кинематическая погрешность зубчатой пары
определяются датчиком углового вращения, таким как измерительный преобразователь вращательного движения, прикрепленный к валу зубчатого колеса и шестерне. Кинематическая погрешность зубчатой пары ![]() вычисляется по формуле:
вычисляется по формуле:
 . (F.5)
. (F.5)
|
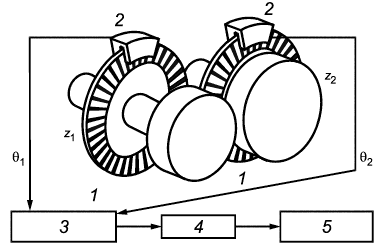
1 - измерительный преобразователь вращательного движения; 2 - считывающее устройство; 3 - счетчик кинематической погрешности; 4 - фильтрация; 5 - преобразование Фурье
Рисунок F.1 - Схематическое представление измерительного прибора для контроля по одной боковой поверхности зуба
При измерении по одной боковой поверхности зуба рекомендуется минимум 30 точек на зуб. После измерения данные фильтруются и проходят через преобразование Фурье. Пример формы передаваемой волны передачи, показанный на рисунке F.2, показывает форму сложной совокупной погрешности шестерни и зубчатого колеса.
|
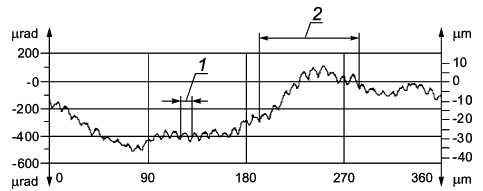
1 - шаг зацепления; 2 - один оборот шестерни
Рисунок F.2 - Пример кинематической погрешности
Небольшие волны в пределах одного шага вызваны погрешностью формы зубьев. На рисунке F.3 показано, что высокочастотная фильтрация волны погрешности с периодом в один шаг зацепления соответствует разнообразным погрешностям формы зубьев. Дополнительно указаны минимальное и максимальное значения местной однопрофильной кинематической погрешности зубчатого колеса ![]() и
и ![]() . На рисунке F.4 показан результат преобразования Фурье. Могут быть замечены острые пики на частоте зацепления и частоте зацепления второго порядка.
. На рисунке F.4 показан результат преобразования Фурье. Могут быть замечены острые пики на частоте зацепления и частоте зацепления второго порядка.
|
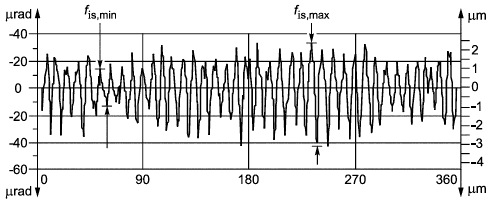
Рисунок F.3 - Высокочастотная фильтрация однопрофильной кинематической погрешности зубчатого колеса
|
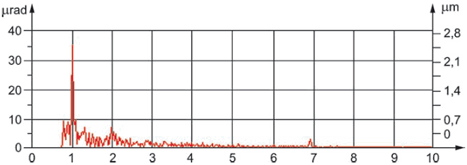
а) порядок амплитуды линейной частоты зацепления зубьев
Рисунок F.4 - Преобразование Фурье однопрофильной кинематической погрешности, лист 1
|
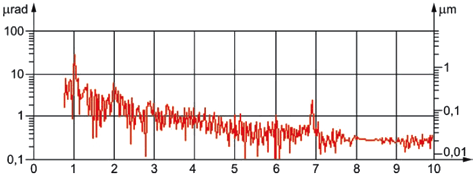
b) порядок амплитуды логарифмической частоты зацепления зубьев
Рисунок F.4, лист 2
Приложение G
(справочное)
Разность соседних шагов,
G.1 Определения разности соседних шагов
G.1.1 Функциональная разность соседних i-х шагов
Функциональная разность соседних i-х шагов (беззнаковая величина), является разностью между фактически измеренными значениями двух последовательных отдельных i-x шагов по правой или левой боковой поверхности. Эта величина равна разности между функциональными погрешностями i-х шагов двух последовательных шагов (см. рисунок G.1).
![]() . (G1)
. (G1)
G.1.2 Разность соседних шагов
Разность соседних шагов определяется максимумом среди значений функциональной разности соседних i-х шагов,
.
G.2 Значение допуска
Допуск разности соседних шагов должен быть вычислен по формуле (G.2):
![]() . (G.2)
. (G.2)
G.3 Руководство по применению
Использование разности соседних шагов должно быть согласовано между заводом-изготовителем и покупателем.
|
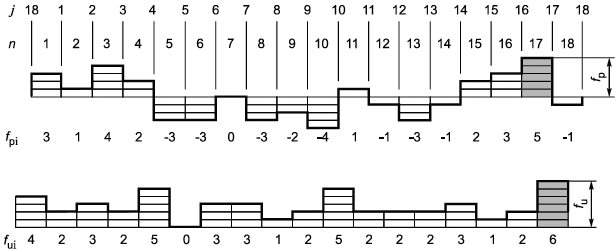
- функциональная погрешность i-тых шагов;
- функциональная разность соседних i-тых шагов; j - номер боковой поверхности; n - номер шага.
Рисунок G.1 - Разность соседних шагов
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов межгосударственным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
ISO 701 | - | * |
ISO 1122-1 | NEQ | ГОСТ 16530-83 "Передачи зубчатые. Общие термины, определения и обозначения" ГОСТ 16531-3* "Передачи зубчатые цилиндрические. Термины, определения и обозначения" |
________________ * Вероятно, ошибка оригинала. Следует читать: ГОСТ 16531-83. - .
| ||
ISO 1328-2 | IDT | ГОСТ ISO 1328-2 "Передачи зубчатые цилиндрические. Система точности по ISO. Часть 2. Определения и допустимые значения отклонений, относящихся к радиальным составным отклонениям, и информация об отклонениях" |
ISO/TR 10064-1 | - | * |
ISO/TS 16610-1 | - | *, |
________________
| ||
ISO 16610-21 | - | *, |
________________
| ||
ISO 21771:2007 | NEQ | ГОСТ 16532-70 "Передачи зубчатые цилиндрические эвольвентные внешнего зацепления. Расчет геометрии" |
* Соответствующий межгосударственный стандарт отсутствует. Примечание - В настоящей таблице использованы следующие условные обозначения степени соответствия стандартов: - IDT - идентичные стандарты; - NEQ - неэквивалентные стандарты. | ||
Библиография
[1] ISO/TR 10064-2 Code of inspection practice - Part 2: Inspection related to radial composite deviations, runout, tooth thickness and backlash
[2] ISO/TR 10064-3 Code of inspection practice - Part 3: Recommendations relative to gear blanks, shaft centre distance and parallelism of axes
[3] ISO/TR 10064-4 Code of inspection practice - Part 4: Recommendations relative to surface texture and tooth contact pattern checking
[4] ISO/TR 10064-5 Code of inspection practice - Part 5: Recommendations relative to evaluation of gear measuring instruments
[5] ISO 14253-1 Geometrical product specifications (GPS) - Inspection by measurement of workpieces and measuring equipment - Part 1: Decision rules for proving conformity or nonconformity with specifications
[6] ISO 17485 Bevel gears - ISO system of accuracy
[7] ISO 18653 Gears - Evaluation of instruments for the measurement of individual gears
[8] AGMA 915-1-A02 Inspection Practices - Part 1: Cylindrical Gears - Tangential Measurements
УДК 621.438.001.4:006.354 | МКС 21.200 | Г15 | ОКП 417000 |
Ключевые слова: зубчатые передачи, цилиндрические зубчатые передачи, точность, положение допусков, допуск на радиальное биение, определения | |||
Редакция документа с учетом
изменений и дополнений подготовлена
{kind=link}