ГОСТ Р 57211.4-2016/
IEC/TR 62131-4:2011
Группа Т34
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Внешние воздействия
ДАННЫЕ О ВОЗДЕЙСТВИИ НА ЭЛЕКТРОТЕХНИЧЕСКОЕ ОБОРУДОВАНИЕ ВИБРАЦИИ И УДАРОВ
Часть 4
Оборудование, перевозимое автодорожным транспортом
Environmental conditions. Data of vibration and shock effects on electrotechnical equipment. Part 4. Equipment transported in road vehicles
ОКС 19.040
Дата введения 2017-10-01
Предисловие
1 ПОДГОТОВЛЕН Открытым акционерным обществом "Научно-исследовательский центр контроля и диагностики технических систем" (АО "НИЦ КД") на основе собственного перевода на русский язык англоязычной версии международного документа, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 183 "Вибрация, удар и контроль технического состояния"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 2 ноября 2016 г. N 1577-ст
4 Настоящий стандарт идентичен международному документу IEC/TR 62131-4:2011* "Внешние воздействия. Вибрация и удары электротехнического оборудования. Часть 4. Оборудование, перевозимое автодорожным транспортом" (IEC/TR 62131-4:2011 "Environmental conditions - Vibration and shock of electrotechnical equipment - Part 4: Equipment transported in road vehicles", IDT).
________________
* Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - .
Наименование настоящего стандарта изменено относительно наименования указанного международного стандарта для приведения в соответствие с требованиями ГОСТ Р 1.5 (пункт 3.5).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные и межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ "О стандартизации в Российской Федерации". Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе "Национальные стандарты", а официальный текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячном информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.gost.ru)
1 Область применения
Настоящий стандарт устанавливает метод использования данных динамических процессов, наблюдаемых на автодорожном транспорте, для формирования типичных условий воздействий вибрации и ударов при перевозке электротехнического оборудования дорожным транспортом. Полученные условия сравниваются с установленными в МЭК 60721-3-2:1997.
Используемые данные динамических процессов были получены из надежных литературных источников. Тем не менее все они прошли процедуру проверки достоверности и согласованности данных в соответствии с [26]. В стандарте представлены также данные, для которых полная процедура проверки достоверности не была выполнена вследствие отсутствия необходимой информации. Такие данные были использованы для косвенного подтверждения согласованности данных, прошедших процедуру проверки.
Данные, используемые в настоящем стандарте, были получены в ходе ряда исследований. Их объем и качество заметно различаются между собой, поскольку в разных исследованиях рассматривались разные виды транспортных средств для разных состояний дорожного покрытия. Большинство рассмотренных динамических воздействий соответствовало условиям движения по дорогам Западной Европы. Предполагается, что один из источников был использован при описании жесткости динамического воздействия в МЭК 60721-3-2:1997, однако анализ данных показывает, что этот источник имел дело с транспортными средствами старых образцов.
2 Нормативные ссылки
В настоящем стандарте использована нормативная ссылка на следующий стандарт*:
________________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
IEC 60721-3-2:1997, Classification of environmental conditions - Part 3: Classification of groups of environmental parameters and their severities - Section 2: Transportation (Классификация условий внешних воздействий. Часть 3. Классификация групп внешних воздействий и их жесткостей. Раздел 2. Транспортирование)
3 Источник данных и их качество
3.1 Программа SRETS
Программа SRETS, частично финансировавшаяся Евросоюзом, была выполнена в рамках совместного предприятия 10 европейскими агентствами и компаниями. Ее целью было определить новые жесткости тестовых динамических воздействий на оборудование, предназначенное для перевозки автодорожным транспортом, с тем чтобы включить их в стандарты СЕН и ИСО по испытаниям оборудования в таре. Работы продолжались три года и были завершены опубликованием итогового отчета [1].
_______________
От английского The Source Reduction by European Testing Schedules.
Этап измерения вибрации и ударов на транспорте включал в себя два отдельных исследования (таблицы 1 и 2).
Задачей первого исследования, проводившегося в Великобритании и включавшего в себя в общей сложности 19 поездок, а также по дорогам Европы (см. таблицу 1), было определение характеристик воздействия вибрации и удара во время дорожных перевозок типичных грузов (товаров). Для этого были выполнены измерения в условиях анонимности водителя при перевозке одного и того же груза по аналогичным маршрутам разными автомобилями одного класса (38-тонными сочлененными грузовыми автомобилями). При этом водителям не сообщалась цель проводимых измерений.
В другом исследовании (см. таблицу 2) измерения выполнялись на тестовых полигонах Германии с использованием двух машин в условиях идентификации водителей, в качестве которых выступали шоферы-испытатели. Задачей этих исследований было сравнение воздействий для разных транспортных средств, грузовых прицепов, грузов и дорожных покрытий. Испытания проводились для трех конфигураций каждого грузового автомобиля (в одном случае с прицепом) на разных скоростях движения. Точки измерения вибрации на разных транспортных средствах показаны на рисунке 1.
В обоих исследованиях использовались твердотельные цифровые регистраторы данных. Во втором исследовании запись велась в непрерывном режиме, тогда как первом - в отдельные периоды времени, которые определялись по уровню сигнала (500 блоков данных, соответствующих максимальной вибрации, по 2048 точек в каждом) и по временным отрезкам (запись блока данных из 2048 точек каждые три минуты). Запись осуществлялась с использованием фильтра Баттерворта нижних частот с частотой среза 1000 Гц с частотой выборки 5500 с. Таким образом, каждому блоку данных соответствовала временная реализация длительностью 0,372 с.
В первом исследовании измерения выполнялись с применением одного трехкомпонентного преобразователя, устанавливаемого на дне поддона с упаковкой бутылок виски. В кузов автомобиля были помещены 16 таких поддонов. При полном заполнении объема автомобиля общая масса груза составила около 90% максимальной грузоподъемности автомобиля. Тот факт, что в данных испытаний не был указан водитель автомобиля, повышает объективность исследования, но затрудняет проверку достоверности данных. В отчете [1] данные по 19 поездкам были сгруппированы для вычисления групповых средних и проведения дисперсионного анализа.
Программа SRETS предусматривала разные виды обработки данных, включая вычисление спектральной плотности мощности, распределение мгновенных значений и построение спектра усталостных повреждений. Всего было применено три разных метода определения жесткости тестовых воздействий для испытаний на вибрацию и удар. Такие испытания были выполнены для четырех разных видов продукции, после чего их результаты были сопоставлены с повреждениями, наблюдавшимися у той же продукции во время реальных перевозок. Было установлено, что испытания обеспечивают появление тех же повреждений, что наблюдаются в процессе реальных перевозок, за несколько более короткий период воздействия. Тем не менее полученная при новых испытаниях частота повреждений оказалась более близкой к реальности, чем при других испытаниях, существовавших на тот момент времени. Результатом программы SRETS были формулировка ряда новых стратегий испытаний и установление ряда ограничений на испытания.
Все исходные данные программы SRETS были сохранены в цифровом виде и в обобщенном виде представлены на рисунках 2-17.
3.2 Круговые испытания CEEES для 10-тонных грузовых автомобилей
_______________
От английского The Confederation of European Environmental Engineering Societies.
Хотя целью круговых испытаний CEEES (см. [2]) не были исключительно измерения динамических воздействий, проведение таких измерений и анализ их результатов разными организациями составляли часть программы. Полученные данные (рисунки 18-20), явившиеся результатом 55-минутного непрерывного измерения и записи вибрации, были переданы для независимого анализа в 20 разных организаций Европы (рисунки 21-23).
Запись данных, организованная Университетом Кренфилда (см. [3]), была получена в ходе поездки из центральной Англии в центральную Германию (рисунки 24 и 25). Запись осуществлялась по 12 каналам на два устройства с применением трехкомпонентного датчика вибрации, закрепленного на грузовой платформе. Параллельно велась также запись скорости движения транспортного средства, в качестве которого был выбран 10-тонный грузовой автомобиль конструкции начала 70-х годов прошлого века с колесной формулой 44, предназначенный для передвижения по пересеченной местности. Изначально спроектированный как военное транспортное средство, он был установлен на серийную раму и претерпел другие модификации, характерные для серийного производства (в частности, был снабжен гидравлическим подъемником). Помимо основной непрерывной записи вибрации были сделаны дополнительные записи во время движения по дороге плохого качества и преодоления препятствий (рисунки 26 и 27) на максимальной безопасной (по усмотрению водителя) скорости. Данные указанных измерений вошли в [17].
Результатом проведенного анализа были построенные спектральные плотности мощности и распределения мгновенных значений ускорения для каждого одночасового интервала поездки, а также для всей поездки в целом. Кроме того, был проведен анализ распределения мгновенных значений скорости движения транспортного средства с целью описания условий движения. Однако применение данной характеристики в целях проводимого исследования ограничено тем, что верхний предел скорости движения транспортного средства был меньше того, что устанавливается для серийных грузовых автомобилей.
Измерения осуществлялись с применением аналогового записывающего устройства и калиброванного оборудования. Диапазон частот измерений - до 500 Гц. Разрешение при построении спектральной плотности мощности составило 1 Гц, а разрешение по ускорению при построении распределения мгновенных значений - 0,002 g. Общий период записи, разбитой на одночасовые интервалы, составил 7 ч. Это обеспечило высокую статистическую точность построения распределения вероятностей вплоть до самых низких (самых высоких) квантилей.
3.3 Измерения Хоппе и Герока
В начале 70-х кодов прошлого века Хоппе и Герок провели исследования, результаты которых нашли отражение в публикациях [4] и [5]. Данные исследований в части жесткости вибрационного воздействия легли в основу нескольких национальных стандартов и, насколько можно судить, были использованы при разработке МЭК 60721-3-2:1997. Приведенный в публикациях объем данных по вибрации весьма ограничен, однако в отношении данных по удару он достаточен, чтобы те были включены в настоящий стандарт.
Измерения были проведены на девяти грузовых автомобилях и трейлерах, данные о которых приведены в таблице 3. В большинстве своем транспортные средства имели рессорную подвеску, характерную для моделей, выпускаемых между 1946 и 1970 годами. Все испытания проводились на сухом дорожном покрытии по замкнутому маршруту, включающему в себя:
- 70% асфальтового и бетонного покрытия;
- 18% поврежденного и восстановленного покрытия;
- 10% ухабистой грунтовой дороги;
- 2% булыжного покрытия.
Кроме того, маршрут включал в себя четыре рельсовых переезда. Скорость движения по маршруту варьировалась от 35 до 45 км/ч в условиях города до 70 км/ч на открытой трассе. На грунтовой дороге скорость падала до 10-20 км/ч. Измерения были проведены в условиях различной степени загрузки транспортных средств.
Данные о вибрации ограничены типичным спектром (рисунок 28) и огибающими спектров (рисунок 29) отдельно для грузовых автомобилей и для прицепов и полуприцепов. Опубликованные данные по ударам приведены в таблицах 4 и 5 и на рисунке 30.
Измерения ускорения проводились в трех направлениях над задней осью, в вертикальном направлении посредине грузовой платформы, в вертикальном направлении у задней оси с краю платформы и в вертикальном направлении в передней части платформы посредине. Все шесть измерений проводились одновременно. Регистрация данных осуществлялась с помощью аналогового записывающего устройства с частотной модуляцией сигнала в диапазоне частот от 1 до 1250 Гц. Длительность записи - 32 с. Разрешение по частоте при построении спектральной плотности мощности - 3 Гц. Удары были классифицированы по восьми уровням и шестнадцати длительностям импульсов.
3.4 Испытания Land Rover Defender на полигоне в Милбруке
В 1998 году по заказу компании Hunting Engineering Ltd на полигоне в Милбруке были проведены измерения динамических воздействий, результаты которых нашли отражение в отчете [6]. Измерения являлись частью программы испытаний электронного оборудования внедорожника Land Rover Defender, LR10. Это был военный автомобиль, переделанный с незначительными изменениями из серийно выпускаемой модели.
Измерительная система включала в себя четыре трехкомпонентных акселерометра и оптический тахометр для определения скорости движения транспортного средства. Данные регистрировались на магнитной ленте калиброванного устройства записи. Три точки измерений находились на стеллажах для оборудования и в задней части грузового отсека. Маршрут движения включал в себя семь участков:
- участок 1, скоростной: скорость движения 48 км/ч, время записи 130 с;
- участок 2, неровная дорога: скорость движения 16 км/ч, время записи 46 с;
- участок 3, мощеная дорога: скорость движения 40 км/ч, время записи 266 с;
- участок 4, холмистая местность: движение с нормальной скоростью, время записи 366 с;
- участок 5, случайные неровности: время записи 56 с;
- участок 6, большие неровности: скорость движения 16 км/ч, время записи 30 с;
- участок 7, пересеченная местность: движение с нормальной скоростью, время записи 673 с;
Результаты измерений приведены в [6]. Измерения проводились по нескольким идентичным каналам с частотой выборки 1024 с, что обеспечило разрешение по частоте приблизительно 0,5 Гц. Данные представлены в форме временных реализаций, спектральных плотностей мощности и распределения мгновенных значений. На рисунке 31 показаны среднеквадратичные значения ускорения, а на рисунке 32 - пиковые значения ударов для каждого участка испытательного полигона. Спектры для ускорения в вертикальном направлении приведены на рисунке 33.
3.5 Испытания грузового автофургона Ford на полигоне в Милбруке
В 1996 году по заказу компании Hunting Engineering Ltd на полигоне в Милбруке были проведены измерения динамических воздействий, результаты которых нашли отражение в отчете [7]. Измерения являлись частью программы испытаний средств коммуникации, установленных на новом автофургоне Ford. Нагрузка на переднюю ось составляла 1248 кг, на заднюю ось - 969 кг, общая нагрузка - 2217 кг.
Измерительная система включала в себя три трехкомпонентных акселерометра, три однокомпонентных акселерометра и преобразователь скорости движения транспортного средства. Данные регистрировались на магнитной ленте калиброванного устройства записи. Большинство точек измерений располагалось на стеллажах для оборудования, а два трехкомпонентных акселерометра - в грузовом отсеке (в его центре и над задней осью автомобиля). Маршрут движения включал в себя следующие участки:
a) для измерений вибрации:
- скоростной участок: скорость движения 85 км/ч, время записи 376 с;
- гравийная дорога: скорость движения 48 км/ч, время записи 157 с;
- дорога класса Б (включая пересечения): скорость движения 64 км/ч, время записи 366 с;
b) для измерений ударов:
- выбоины большого и малого размера: скорость движения 16 км/ч;
- световозвращатель "кошачий глаз": скорость движения 48 км/ч;
- рельсовый переезд: скорость движения 32 км/ч.
Измерения проводились по нескольким каналам с частотой выборки 1024 с, что обеспечило разрешение по частоте приблизительно 0,5 Гц. Данные представлены в форме временных реализаций, спектральных плотностей мощности и распределения мгновенных значений. На рисунке 34 показаны среднеквадратичные значения ускорения, на рисунке 35 - максимумы спектральных плотностей, а на рисунке 36 - пиковые значения ударов для каждого участка испытательного полигона. Спектры для ускорения в вертикальном направлении приведены на рисунке 40.
3.6 Испытания Renault Magnum на полигоне в Милбруке
В 1996 году по заказу компании Hunting Engineering Ltd на полигоне в Милбруке были проведены измерения динамических воздействий, результаты которых нашли отражение в отчете [8]. Измерения являлись частью программы испытаний средств коммуникации, установленных на новом тягаче Renault АЕ 385ti Magnum с полуприцепом и прицепом-фургоном, в котором был оборудован командный и коммуникационный центр. Нагрузка на переднюю ось составляла 5764 кг, на заднюю ось - 8985 кг, общая нагрузка - 14749 кг.
Измерительная система включала в себя один трехкомпонентный акселерометр, четыре двухкомпонентных акселерометра, два однокомпонентных акселерометра и преобразователь скорости движения транспортного средства. Данные записывались на магнитную ленту калиброванного устройства записи. Большинство точек измерений располагалось на стеллажах для оборудования, а два двухкомпонентных акселерометра - в передней части прицепа. Маршрут движения включал в себя следующие участки:
a) для измерений вибрации:
- скоростной участок: скорость движения 85 км/ч, время записи 347 с;
- гравийная дорога: скорость движения 32 и 48 км/ч, время записи 197 с;
- дорога класса Б (включая пересечения): скорость движения 48 и 64 км/ч, время записи 254 с;
b) для измерений ударов:
- выбоины большого и малого размера: скорость движения 16 км/ч;
- световозвращатель "кошачий глаз": скорость движения 48 км/ч;
- рельсовый переезд: скорость движения 32 км/ч.
Измерения проводились по нескольким каналам с частотой выборки 1024 с, что обеспечило разрешение по частоте приблизительно 0,5 Гц. Данные представлены в форме временных реализаций, спектральных плотностей мощности и распределения мгновенных значений. На рисунке 37 показаны среднеквадратичные значения ускорения, на рисунке 38 - максимумы спектральных плотностей, а на рисунке 39 - пиковые значения ударов для каждого участка испытательного полигона. Спектры для ускорения в вертикальном направлении приведены на рисунке 40.
3.7 Дополнительные источники данных
Поиск информации о наблюдавшихся динамических воздействиях на автодорогах позволил обнаружить еще несколько источников, заслуживающих доверия, но для которых не было возможности провести полную процедуру подтверждения надежности данных. Использовать данные из источников, описанных в настоящем пункте, следует с осторожностью. Они включены в настоящий стандарт в первую очередь в качестве вспомогательного материала для подтверждения информации из других источников.
Французский военный стандарт GAM EG 13 ([9]) содержит данные, полученные для двух транспортных средств. В процессе испытаний грузовой фургон Renault Trafic грузоподъемностью 1,9 т с колесной формулой 42 был полностью загружен массой 1950 кг. Измерения выполнялись с помощью трехкомпонентных акселерометров, установленных в двух точках, о которых известно, что они находились "в центре грузовой платформы" и "на продольном брусе рамы". Другим испытуемым транспортным средством служил военный 20-тонный грузовой автомобиль Renault TRM 1000, измерения вибрации которого осуществлялись с помощью трехкомпонентного акселерометра, установленного на шасси. Измерения были проведены для ряда реальных дорожных условий с разными дорожными поверхностями (были ли это обычные дороги или испытательный полигон, неизвестно). Все данные представлены в форме спектральной плотности мощности ускорения с разрешением 1 Гц и выше. Длина записи неизвестна, поэтому невозможно установить характеристики точности анализа. Сводка изменений среднеквадратичного значения ускорения в зависимости от дорожного покрытия и скорости движения приведена в таблицах 6 и 7 для Renault Trafic и Renault TRM 1000 соответственно. Спектры, полученные для этих двух машин, совмещены на рисунках 41 и 42.
В начале 70-х годов прошлого века в США были проведены испытания с целью определить типовые жесткости динамического воздействия при транспортировке грузов, включая перевозку автодорожным транспортом, для включения их в американский стандарт Mil Std 810. Результаты испытаний отражены в [10]. Насколько можно судить, испытания были проведены в условиях реального дорожного движения на территории США. Испытуемые транспортные средства включали в себя:
a) тягач с высокой степенью износа с прицепной грузовой платформой на листовых рессорах;
b) восстановленный тягач с прицепной грузовой платформой на листовых рессорах;
c) тягач с высокой степенью износа с прицепным кузовом-фургоном на пневматической подвеске;
d) новый тягач с прицепным кузовом-фургоном на пневматической подвеске;
e) тягач с малой степенью износа с прицепным кузовом-фургоном на листовых рессорах;
f) 2,5-тонный грузовой автомобиль-платформу серийного производства;
g) 2,5-тонный грузовой автомобиль-фургон, модернизированный для перевозки взрывчатых веществ.
Приведенная в [10] информация не позволяет разделить полученные данные по указанным транспортным средствам. Кроме того, в работе использованы специальные методы анализа, не позволяющие осуществить непосредственное сравнение результатов с данными из других источников. Построенные в итоге тестовые спектры (рисунок 43) полезно сравнить с тестовыми воздействиями, полученными другими методами в других источниках.
В середине 80-х годов прошлого века в США были проведены дополнительные испытания для определения типовых жесткостей динамического воздействия с целью включения их в американский стандарт Mil Std 810 (см. [11]). Все испытания были проведены на военной технике на специальном полигоне в Абердине. Испытуемые транспортные средства включали в себя:
1) 12-тонный полуприцеп М127;
2) 5-тонный грузовой автомобиль М813;
3) 5-тонный грузовой автомобиль М814;
4) 2,5-тонный грузовой автомобиль М36;
5) 1,5-тонный коммерческий вспомогательный грузовой автомобиль М1009;
6) 1,25-тонное высокомобильное многоцелевое колесное транспортное средство М998;
7) 10-тонный тяжелый грузовой автомобиль повышенной проходимости М985;
8) 0,25-тонный 2-колесный трейлер М416;
9) 1,5-тонный 2-колесный трейлер М105А2.
Приведенная в [11] информация не позволяет разделить полученные данные по указанным транспортным средствам. Кроме того, в работе использованы специальные методы анализа, не позволяющие осуществить непосредственное сравнение результатов с данными из других источников. Построенные в итоге тестовые спектры (рисунок 44) полезно сравнить с тестовыми воздействиями, полученными другими методами в других источниках.
Кроме того, был выявлен еще ряд источников данных, которые трудно связать с какими-либо конкретными условиями динамических воздействий. Эти данные приведены для полноты анализа и возможности сопоставления с ними данных из надежных источников. Так, в [12] приведены полученные отклики в вертикальном направлении для нескольких видов дорожных покрытий (см. рисунок 45), данные из того же источника для нескольких направлений измерений для прицепа и полуприцепа приведены на рисунках 46 и 49 соответственно. Вибрация в вертикальном направлении для 15-тонного грузового автомобиля, заимствованная из [14], показана на рисунке 47. Данные из [15] для трейлера на листовых рессорах показаны на рисунке 48. Данные исследования смешанных перевозок (см. [16]) показаны на рисунке 50.
4 Сопоставление записей из одного источника
4.1 Общие замечания
Данные из каждого источника подверглись проверке на самосогласованность. Процедура проверки записей вибрации учитывала ее изменчивость вследствие изменений типа транспортного средства, его скорости, его загруженности и состояния дорожного покрытия. В то же время, хотя различными источниками подтверждается существенное влияние вышеперечисленных факторов, возможно, в не меньшей степени жесткость вибрации может зависеть от стиля управления транспортным средством.
4.2 Программа SRETS
В исследовании [1] выполнено много проверок данных на самосогласованность и согласованность с данными других источников. Сопоставления по испытаниям с объявленной целью были проведены для разных типов транспортных средств (рисунок 8), типов дорожного покрытия (рисунок 9) и разных нагрузок. Эта информация в обобщенном виде представлена на рисунке 5. При испытаниях без объявления водителю их цели большое внимание уделялось поддержанию постоянства ряда влияющих факторов (машины одного класса с равными загрузками перемещались по одному и тому же маршруту). Это позволяло выявлять воздействие других факторов, в том числе манеры вождения. Изменения в характере вибрации можно наблюдать на рисунках 2 и 3, где собраны данные по 18 поездкам, из которых 16 (с номерами от 4 до 19) были номинально идентичными.
Анализ дисперсий, выполненный по разным наборам данных, показал, что данные, полученные в испытаниях с объявлением и без объявления цели, не различаются между собой в пределах доверительной вероятности 95% при условии, что сравниваются данные, полученные для одних и тех же влияющих факторов. Это позволило выполнить сопоставление данных, полученных в условиях вождения информированным водителем по реальным дорогам без учета данных испытаний на полигоне (рисунок 6). Причиной такого решения послужило то, что анализ дисперсий показывал существенное различие в результатах измерений, проведенных на реальных дорогах и на тестовом полигоне. Другое отличие проявилось в принципе начала сбора (записи) данных с участием неинформированного водителя: по событию или по времени. Разница, обусловленная этими двумя стратегиями, показана на рисунках 10-13. Из этих рисунков можно также увидеть, что разброс данных существенно выше, если водитель не был проинформирован о целях испытаний. Это явилось еще одним доводом в пользу проведения измерений без информирования водителя об их целях.
В результате измерений по программе SRETS были выявлены следующие закономерности в изменении жесткости динамического воздействия для разных влияющих факторов:
- дорожное покрытие: существенных отличий при движении по обычной дороге и по автотрассе не выявлено, но при испытаниях на полигоне вибрация была в 2-3 раза выше, чем при езде по обычной дороге;
- направление измерений: вибрация слабо зависит от направления в горизонтальной плоскости (продольное или поперечное), но она заметно выше (от 10 до 40%) в вертикальном направлении;
- тип транспортного средства: вибрация на тягаче оказалась несколько выше, чем на его прицепе, а на том, в свою очередь, выше, чем на полуприцепе. Однако эта разница не очень значительна;
- загруженность транспортного средства: жесткость вибрации падает с увеличением массы груза (для пустого грузового автомобиля она выше, чем для загруженного);
- начало сбора данных (по событию или по времени): решение вопроса о том, по какому признаку начинается сбор данных, является весьма актуальным для современных цифровых систем измерений, в которых часто процесс записи начинается по поступлении соответствующего сигнала. Установлено, что если запись начинают при наступлении какого-либо события, то уровень измеренной вибрации будет выше, чем если начинать запись в заранее определенные моменты времени. Однако в целом характеристики как спектров вибрации, так и распределения мгновенных значений будут схожими для обеих стратегий.
4.3 Круговые испытания CEEES для 10-тонных грузовых автомобилей
Данные испытания включали в себя измерения скорости движения транспортного средства, что позволяло учитывать ее как фактор, влияющий на уровень вибрационных и ударных воздействий, и установить количественные соотношения. Кроме того, запись сигнала в течение длительного интервала времени улучшала качество построения плотностей распределения вероятностей вплоть до самых низких (самых высоких) квантилей. В процессе исследований были установлены следующие закономерности:
- зависимость жесткости вибрации от скорости автомобиля: анализ показал, что такая зависимость существует (рисунок 19). Эта зависимость нелинейна - чем выше скорость движения автомобиля, тем выше скорость повышения уровня вибрации. Подобный вывод был подтвержден на качественном уровне более поздними исследованиями SRETS;
- зависимость жесткости ударов от скорости автомобиля: анализ не показал отчетливого присутствия такой зависимости (рисунок 20). Удары наблюдаются в широком диапазоне скоростей движения автомобиля;
- соотношение между вибрационным и ударным воздействиями: анализ распределений мгновенных значений ускорения показал, что для вибрации может быть построено устойчивое распределение, близкое по форме к нормальному (рисунок 25). Показано также, что распределение для ударов похоже на распределение для вибрации, но является более расплывшимся.
4.4 Измерения Хоппе и Герока
Данные исследования содержат недостаточный объем данных о вибрации для их сопоставления. Более полная информация приведена в отношении ударных воздействий, что позволяет идентифицировать их и провести оценку для разных транспортных средств. Недостаточная информация о вибрационных воздействиях не дает возможность проверить качество данных, и результаты этих исследований рассматриваются в настоящем стандарте только по той причине, что они, по-видимому, легли в основу определения жесткости динамических воздействий в МЭК 60721-2-3:1997.
4.5 Измерения на полигоне в Милбруке
Хотя отсутствие в отчетах исходных данных не позволяет провести оценку их согласованности, такая проверка в исследовании была проведена, прежде чем эти данные были обобщены в итоговых результатах. При проверке основное внимание было уделено тому факту, что жесткость вибрации при испытаниях Land Rover оказалась ниже той, что можно было бы ожидать для такого небольшого автомобиля. Однако для всех автомобилей было получено достаточно хорошее соответствие между вибрацией и состоянием дорожного покрытия (испытания проводились только на дорогах относительно хорошего качества). Уровень вибрации оказался низким и для двух других испытуемых машин, Ford Transit и Renault Magnum, но в данном случае это можно объяснить тем, что указанные машины представляли собой новые современные модели, специально сконструированные для езды по хорошим дорогам.
4.6 Renault Trafic и Renault TRM 1000
Для этих машин результаты представлены в [9] только в виде спектральных плотностей мощности, что не позволяет провести проверку согласованности исходных данных. Эти результаты представлены в настоящем стандарте, чтобы показать их лучшую согласованность, чем можно было ожидать на первый взгляд. Хотя одно из двух измерений для Renault TRM 1000 явно выпадает из всех других, это отличие не сильно превышает вариации, наблюдаемые в данных из других источников. Выпадающие данные получены для движения по специально спроектированной полосе с преградами в виде металлических полос, преодолеваемых на скорости 23,5 км/ч, и небольших рытвин, преодолеваемых на скорости 13,5 км/ч. Соответствующие спектры вибрации в настоящий стандарт не включены.
4.7 Испытания на дорогах США в 70-80-е годы прошлого века
Хотя эти два исследования, описанные в 3.7, имели разные цели, в них обоих была применена автоматизированная обработка сигналов, исключающая проверку согласованности исходных данных. Известно, что в [10] обработке подвергались только 10% данных с максимальным уровнем вибрации. Однако способ, каким была объединена информация по машинам разных моделей, неизвестен. В [11] результаты были представлены в виде суммы среднего значения и стандартного отклонения, что также свидетельствует об автоматизированном характере обработки сигналов. Очевидно, что добавление к среднему значению стандартного отклонения (рассчитанному по ансамблю испытуемых автомобилей) осуществлялось только тогда, когда была уверенность в отсутствии выпадающих данных. Тем не менее выполнить проверку данных из этих источников на самосогласованность не представляется возможным, и, кроме того, сами источники не сообщают о том, что подобная проверка была проведена.
5 Сопоставление данных из разных источников
Большинство данных, рассматриваемых в настоящем стандарте, демонстрируют хорошую согласованность в пределах одного источника по крайней мере в том, что касается записей вибрации. Вместе с тем отчетливо наблюдается расхождение в результатах, описанных в разных источниках, и, что более важно, в пределах одного исследования. Это может быть свидетельством того, что анализ был проведен для недостоверных, некачественных исходных данных, но более вероятно отнести данные расхождения на счет разнообразия дорожных условий и индивидуальных особенностей водителей. Тем не менее рассмотренные данные позволили выявить ряд закономерностей, прослеживаемых для всех использованных источников.
В целом установлено, что пиковые значения вибрации наблюдаются в области низких частот (обычно от 6 до 10 Гц), что может быть связано с подвеской автомобиля. Наблюдается также повышение пиковых значений в диапазоне от 100 до 300 Гц, и этот эффект может быть объяснен динамическими свойствами самого автомобиля. Для транспортных средств с эффективной подвеской, движущихся по дорогам хорошего качества, вибрация на нижних и средних частотах практически не отличается. Однако для автомобилей с устаревшей системой подвески или при движении по плохим дорогам (в особенности по испытательным полигонам) отклик вибрации, связанный с реакцией подвески на низких частотах, весьма заметен.
В то же время спектр вибрации для отдельного транспортного средства практически равномерно распределен по всему диапазону нижних и средних частот. Это дало основание некоторым исследователям утверждать, что для описания изменения вибрации под влиянием отдельных факторов, таких как скорость движения, индивидуальные особенности водителя, качество дорожной поверхности, можно использовать только один параметр - среднеквадратичное значение ускорения широкополосной вибрации. Некоторые исследователи пошли дальше и предложили считать форму спектра одинаковой для машин разных классов. Однако, по-видимому, для таких выводов нет достаточных экспериментальных свидетельств.
Рассмотренные источники указывают, что отклик вибрации в вертикальном направлении больше, чем в горизонтальной плоскости. Для установления устойчивой закономерности жесткости вибрации по разным направлениям имеющейся информации недостаточно. В военном стандарте [17], данные которого в настоящем стандарте не воспроизведены, указано, что наихудшие условия по вибрации наблюдаются над задней осью автомобиля, а в случае полуприцепа - над пятым колесом. Это подтверждается результатами некоторых исследований, использованных в настоящем стандарте.
По установленным закономерностям можно судить, насколько разные базы данных наблюдаемой вибрации соответствуют друг другу. Обычно такая совместимость достаточно хороша. Однако из этого ряда выпадают исследования Хоппе и Герока, результаты которых отличаются как в отношении спектров, так и максимальных значений. Эти исследования были проведены для машин старых моделей. Кроме того, по приведенной в публикациях информации невозможно судить, насколько общими они являются для автомобилей разных видов. По этой причине возможность применения результатов таких исследований можно поставить под сомнение. Можно отметить также, что в базе данных, полученных на полигоне в Абердине, наблюдается чрезмерно высокий отклик вибрации на низких частотах в области резонанса подвески. Это выпадает из ряда данных других наблюдений, сделанных в ходе испытаний по обычным дорогам, и, по-видимому, может быть объяснено особо жесткими условиями испытаний на данном полигоне.
В отношении ударного воздействия наблюдаются расхождения в том, каким способом условия таких воздействий были получены, как данные этих воздействий был обработаны и оценены количественно. Некоторые жесткости ударных воздействий были получены в результате наезда автомобиля на заранее подготовленные препятствия. В других случаях удары идентифицировались по пиковым откликам ускорения, наблюдаемым в ходе поездки по реальным дорогам (т.е. в результате наездов на дорожные препятствия). Преимуществом последнего способа получения данных является то, что он дает возможность установить частоту событий, связанных с ударом. При достаточном объеме данных результаты указанных подходов (по крайней мере в теории) не должны сильно различаться между собой (при условии разумного выбора искусственно созданных препятствий и скорости наезда на них).
В целом результаты по удару, полученные с использованием двух вышеуказанных подходов, совпадают. Те исключения, которые имеют место, объясняются, по-видимому, выбором нерепрезентативных препятствий (таких, например, как бордюрный камень высотой 300 мм, на который осуществляется фронтальный наезд) или слишком жесткими условиями испытаний на полигоне. Выпадающими опять-таки являются результаты, полученные Хоппе и Героком. Например, приведенные в них пиковые значения существенно выше, чем по данным других источников. В этом случае причина вновь может заключаться в том, что испытания проводились на автомобилях старых моделей, а также в том, что эти автомобили испытывались в ненагруженном состоянии. При этом ограниченные по объему данные для подвесок относительно новой конструкции ближе к результатам из других источников. Хотя и эти "новые" подвески в настоящее время следует отнести к устаревшим.
Во всех источниках за одним исключением результаты анализа данных вибрации представлены в виде усредненной спектральной плотности мощности ускорения. Такой метод анализа представляется обоснованным с учетом того, что динамические воздействия на автомобильном транспорте, по сути, представляют собой широкополосный случайный процесс. Однако при этом следует иметь в виду, что в реальных условиях дорожного движения этот процесс будет нестационарным. Это приводит к нестабильности получаемых спектров. Для уменьшения этой вариативности некоторые исследователи огибающую спектров получают добавлением к среднему значению одного стандартного отклонения. Кроме того, как правило, информация о спектрах дополняется распределениями мгновенных значений ускорения. Ни в одном из источников, за исключением отчета о круговых испытаниях CEEES, не указывается о проведении проверок на стационарность.
В представлении данных по ударам также было использовано несколько подходов. Причиной такого разнообразия в том числе явились разные условия, при которых наблюдались ударные воздействия. Удары, случающиеся во время продолжительной записи вибрации, трудно идентифицировать простыми методами (эта проблемы была выявлена в круговых испытаниях CEEES). Наиболее общие подходы заключались в построении плотности распределения мгновенных значений или в анализе преодоления искусственных препятствий и построении ударных спектров (для более ранних исследований).
6 Идентификация жесткости динамических воздействий
Помимо описания разных условий динамических воздействий в ряде документов представлены спектры вибраций, рекомендуемые для проведения испытаний на воздействие вибрации при транспортировании. Часть таких спектров была подвергнута анализу в отчете [1]. Было показано, что жесткости предлагаемых тестовых воздействий существенно различаются между собой.
В самой работе [1] представлено четыре группы тестовых спектров с рекомендациями по длительности воздействия. Эти спектры появились как результат применения четырех разных стратегий преобразования результатов измерений в жесткость испытаний. Две из этих четырех полученных групп жесткостей воздействия были впоследствии признаны наиболее соответствующими условиям реального дорожного движения.
Одна группа была получена только на основе анализа спектральных плотностей мощности ускорения. Соответствующие спектры вибрации в вертикальном и поперечном направлениях представлены на рисунках 51 и 52. Предполагается, что испытания на вибрацию установленной жесткости должны сочетаться с испытаниями на удар, описанными в таблице 8. Отмечено, что для разных условий состояния дорог (хороших, плохих и очень плохих) предлагаются разные уровни вибрационных воздействий.
Вторая группа была получена на основе сочетания спектральных плотностей мощности и наблюдаемых вариаций в распределениях мгновенных и среднеквадратических значений. Предполагалось, что в этом случае будут лучшим образом описаны такие влияющие факторы, как изменение скорости движения автомобиля, состояние дорожного покрытия и манера движения водителя. Полученные спектры (они представлены на рисунках 53 и 54 для вертикального и поперечного направлений) должны охватить в том числе и ударные воздействия. Эти тестовые воздействия предполагается применять для всех условий движения, за исключением движения по очень плохим дорогам.
Публикации [10] и [11] были взяты за основу при определении жесткостей тестовых вибрационных воздействий в военном стандарте Mil Std 810. При этом вибрационное воздействие из [10] (рисунок 43) определено как "базовая вибрация", а из [11] (рисунок 44) - как "смешанная вибрация". Жесткость вибрации по [10] близка к ряду других, рассмотренных в настоящем стандарте, в то время как жесткость вибрации по [11] существенно от них отличается. Частично это объясняется тем, что публикация [11] изначально была рассчитана на то, чтобы стать основой военного стандарта, и поэтому в ней рассматривалось движение по плохим и разрушенным дорогам. Другой причиной, по-видимому, является то, что в [11] намеренно в отклике вибрации учтен вклад низкочастотных колебаний подвески транспортного средства. Эти колебания создают очень большие перемещения, для воспроизведения которых требуется вибростенд с большим ходом стола, и которые не могут быть обеспечены основной массой применяемых вибростендов.
Жесткости вибрации, установленные в двух других военных стандартах (см. [17], [18]) показаны на рисунках 55 и 56. Они похожи как между собой, так и на данные из [10], использованные в Mil Std 810. Аналогичные воздействия стандартизованы и в других документах - [19] (рисунок 58) и [29] (рисунок 60).
Спектр тестового вибрационного воздействия из ASTM D4728-95 ([13]) показан на рисунке 57. Самые недавние тестовые воздействия, используемые в документах европейского и международного технического комитетов (СЕН/ТК 261 и ИСО/ТК 122) показаны на рисунке 59.
7 Описание условий динамических воздействий
В идеале при описании условий динамических воздействий должны быть учтены все аспекты таких воздействий. Но на практике достаточно ограничиться теми факторами, которые оказывают наибольшее влияние на возможные повреждения и отказы испытуемого оборудования. Но и при таком упрощенном подходе выявление самых важных аспектов в случае описания условий воздействия вибрации и ударов на дорожном транспорте представляет собой сложную задачу. Исторически вибрацию, действующую на оборудование при его транспортировании автомобилями, определяли через испытания нескольких видов (на вибрацию, на удар, на транспортную тряску). Эти испытания были построены в большей степени с учетом ограниченных возможностей испытательного оборудования, существовавшего в 50-60-е годы прошлого века, а не исходя из его способности создать условия, репрезентативные с точки зрения возможных форм повреждений и отказов объектов испытаний.
Плохое описание условий динамических воздействий при перевозке автотранспортом усугублялось разнообразием форм защиты перевозимого груза (тары и упаковки). Проблема обострилась в последние годы, когда стало необходимо принимать во внимание рост скоростей передвижения и стоимости работ по упаковке грузов. В исследовании [21] показано, что виды повреждений и отказов упакованного оборудования могут быть самыми разными.
Сложность описания условий динамических воздействий при перевозке грузов автотранспортом состоит в том, что невозможно отдельно описать влияние таких факторов, как скорость движения и состояние дорожного покрытия, поскольку эти влияния комбинируются с влиянием третьего фактора - манеры езды конкретного водителя.
Ярко выраженной особенностью условий динамических воздействий на автотранспорте является низкочастотный отклик, связанный с резонансами подвески транспортного средства. Этот отклик может обеспечивать самые высокие пики в спектрах как ускорения, так и скорости или перемещения. Как можно ожидать из динамики движения подвески, амплитуды отклика зависят от скорости движения и состояния дороги. При проектировании подвески стремятся ограничить ее динамический отклик на возбуждение при умеренно высоком уровне демпфирования и ослабить ударные и вибрационные воздействия на транспортируемый груз (подвеска с резонансами в низкочастотной области успешно отфильтровывает любое высокочастотное возбуждение). Современные пневматические подвески делают это более успешно, чем старые листовые рессоры, поскольку сохраняют свои свойства практически независимо от степени загруженности транспортного средства.
Доминирование низкочастотной составляющей, обусловленной подвеской, в вибрационном отклике автомобиля побудило некоторых исследователей считать вибрацию, воздействующую на автотранспорте, преимущественно гармонической. Однако использование современной техники анализа показывает, что эта вибрация является случайной и имеет распределение, близкое к нормальному для широкого спектра реальных автомобильных дорог. Однако описание через нормальное распределение подходит в меньшей степени, когда приходится принимать во внимание изменения амплитуд вибрации, связанных с изменением скорости движения автомобиля. Следствием центральной предельной теоремы теории вероятности является тот факт, что комбинация нормальных распределений также стремится к нормальному распределению. Но данная закономерность нарушается в случае нелинейных характеристик динамической системы автомобиля, в первую очередь системы его подвески.
Составляющие спектральной плотности ускорения на частоте подвески обычно являются преобладающими. Однако эти низкочастотные ускорения не являются единственной причиной возможных повреждений транспортируемого оборудования. Многие повреждения появляются вследствие больших значений скорости и перемещений, которые требуют внимания также и по другой причине. В процессе транспортирования оборудование, не зафиксированное должным образом, под воздействием динамических сил подпрыгивает вверх и падает обратно, соударяясь с платформой, что повышает риск специфических повреждений. Непосредственно перед ударом кинетическая энергия оборудования определяется скоростью, сообщаемой оборудованию автомобилем. Однако характеристики контактирующих поверхностей оборудования и транспортного средства, на которые приходятся удары, влияют на то, каким образом кинетическая энергия преобразуется в энергию механических напряжений. В общем, чем быстрее происходит преобразование кинетической энергии в энергию напряжений, тем больше ускорение, обусловленное ударом. Такие условия транспортирования обычно называют транспортной тряской, и для них предусмотрен собственный метод испытаний, установленный в [24]. Удары, обусловленные тряской, не следует путать с ударами, обусловленными состоянием дорожного покрытия. Они вызваны разными причинами и их жесткости обусловлены разными факторами.
Построение огибающей спектра в низкочастотной области, в которой вибрация определяется работой подвески, не является простой задачей. Проблема связана с тем, что во многих рассматриваемых исследованиях не было обеспечено соответствующего разрешения по частоте. Однако представляется, что выбор огибающей на уровне 0,001 g/Гц в области низких частот (подвески) позволит охватить большинство вибрационных воздействий при движении большинства видов автомобилей по обычным дорогам. Кратковременно уровень вибрации может вырастать до 0,01 g
/Гц. При движении по плохим дорогам машин с неэффективной системой подвески обычным можно считать уровень вибрации 0,01 g
/Гц, который кратковременно может вырастать до 0,1 g
/Гц. Если руководствоваться неподтвержденными данными Mil Std 810 ([11]), то уровень "смешанной вибрации" в области резонансов подвески при движении по очень плохим дорогам может составлять до 0,7 g
/Гц. Все приведенные значения относятся только к вибрации в вертикальном направлении. Типичный диапазон резонансов подвески включает в себя частоты от 1 Гц (для пневматической подвески) до 10 Гц (для листовых рессор ненагруженного автомобиля). Перемещения, обусловленные работой подвески, даже в случае движения обычного автомобиля по средней по качеству дороге могут достигать 100 мм.
В настоящее время в стандартах [23] и [24] нижней границей диапазона частот вибрации является 5 Гц. Это только немногим ниже низкочастотного резонанса подвески в виде листовых рессор, но выше области резонансов для пневматической подвески. Причиной выбора именно такой низкочастотной границы (5 Гц) являлись ограничения по воспроизведению заданных скоростей и перемещений электродинамическими вибростендами. Для большинства из них ход поршня не превышал 25-50 мм. При более высоких значениях перемещения, как правило, необходимо было применять гидравлические вибростенды, что вызывало новые проблемы, поскольку у таких устройств ограничена верхняя граница диапазона частот возбуждения.
Вибрация, не связанная с работой подвески, сосредоточена в основном в диапазоне частот от 100 до 200 Гц. Это является следствием особенностей динамических характеристик автомобиля, условий работы двигателя и трансмиссии. Вибрация в этой области заметно меньше зависит от скорости движения автомобиля и состояния дорожного покрытия. Обычно для описания вибрации в среднем диапазоне частот можно использовать огибающую уровня 0,001 g/Гц, которую в редких случаях приходится увеличивать до 0,01 g
/Гц (если состояние двигателя и трансмиссии автомобиля неудовлетворительно). Выше границы 200 Гц огибающая обычно спадает со скоростью 6 дБ/октава. Такой же спад (до частоты приблизительно 100 Гц) можно наблюдать и в области выше резонансов подвески. В большинстве случаев среднеквадратичное значение ускорения не будет превышать 0,2 g, иногда поднимаясь до 0,4 g и очень редко до 1,0 g.
В описании жесткости ударов, наблюдаемых при переезде через препятствия, имеются существенные расхождения. Как уже отмечалось, частично это является следствием разных подходов к количественному описанию ударов, а частично - разных методов сбора информации. При анализе длинных временных реализаций, собранных при движении автомобиля по реальным дорогам, наличие ударов приводит к особенностям распределения мгновенных значений, которое приближенно можно описать нормальным законом. При этом ударные воздействия лучше описывать через переходные процессы, а не через импульсы классической формы (рисунки 16 и 17). Это продемонстрировано в испытаниях SRETS по преодолению автомобилем искусственных неровностей. Такие неровности вызывают вертикальное перемещение автомобиля в форме полусинусоиды. Но на платформу, где расположен груз, воздействие передается в виде наложенных затухающих колебаний. Время между переходными процессами определяется колесной базой и скоростью движения транспортного средства. Ударные спектры, построенные для описания таких воздействий, были очень похожи на ударные спектры случайной вибрации с большими пиковыми значениями.
Пиковые значения ускорения при ударах во время движения по обычным дорогам с реальными препятствиями в условиях, когда водитель извещен о цели испытаний, обычно не превышают 2 g, хотя в некоторых испытаниях SRETS были получены более высокие значения. Проблема, однако, состоит в том, что при испытаниях без извещения водителя об их цели были получены более высокие значения ускорения. Логично объяснить это тем, что неинформированный водитель преодолевает препятствия на более высокой скорости, чем в случае, когда он знает о цели испытаний. Другой причиной более высоких ускорений, полученных SRETS, было то, что измерения выполнялись в точке непосредственно под незакрепленным поддоном. Большую часть времени поддон лежит в непосредственном контакте с кузовом, однако при больших перемещениях поддон "подпрыгивает" вверх. Если не учитывать эти обстоятельства, то ударные ускорения могут достигать значения 8 g.
Как отмечалось, на пиковые значения ускорения в условиях транспортной тряски прежде всего влияют динамические свойства (в основном жесткость) соударяющихся поверхностей (перевозимого груза и автомобиля). Измерения SRETS, выполненные в ходе коммерческих перевозок грузов, показали, что условия тряски наблюдаются ограниченное время (менее 0,0001% общей длительности перевозки). Очевидно, что эти условия гораздо чаще будут наблюдаться в случае военного транспорта, передвигающегося в зоне военных действий. По этой причине имитация условий тряски предписывается при испытаниях оборудования, устанавливаемого на внедорожных (военных) автомобилях, но редко используется для оборудования, транспортируемого автомобилями коммерческого назначения. Установление диапазона пиковых ускорений при тряске требует рассмотрения всего многообразия оборудования, транспортных средств и их комбинаций. Это выходит за пределы анализа собранных данных. Однако значения ускорений, приведенные выше, охватывают общие условия дорожного движения, которые в том числе включают в себя и транспортную тряску.
8 Сопоставление с МЭК 60721-3-2:1997
На рисунках 61, 63 и 65 показаны жесткости вибрационного воздействия, определенные в МЭК 60721-3-2:1997 для стационарной случайной вибрации [таблица 5, категория b)], для стационарной гармонической вибрации [таблица 5, категория а)] и для нестационарной вибрации [таблица 5, категория с)] соответственно для всех видов транспортирования безотносительно вида транспортного средства. Поскольку стандарт характеризует общие условия внешних воздействий, в нем отсутствуют рекомендации по продолжительности или по числу тестовых воздействий.
В стандартах серии [23] содержатся уровни тестовых воздействий вибрации и удара для имитирования условий транспортирования, и эти уровни отличаются от установленных в [24]. Жесткости воздействия по [23] показаны на рисунках 62, 64 и 66 соответственно для стационарной случайной вибрации, стационарной гармонической вибрации и ударов. При этом определены длительность тестового воздействия вибрации и число прилагаемых ударов.
Поскольку в [23] и [24] установлены разные уровни воздействия, вопросы согласования этих двух документов решаются в [25]. В нем рекомендуется при моделировании вибрационных воздействий обращаться к [23]. Однако для случаев ударных воздействий [25] в качестве решения предлагает третий вариант, показанный на рисунке 67.
В МЭК 60721-3-2:1997 введены три класса транспортных средств, обозначенных 2М1, 2М2 и 2М3, с весьма кратким пояснением, как именно осуществляется классификация. Тем не менее в отношении автотранспортных средств можно считать, что:
- 2М1 включает в себя грузовые автомобили и трейлеры с пневматической подвеской;
- 2М2 включает в себя грузовые автомобили и трейлеры, передвигающиеся в условиях хорошо развитой дорожной сети;
- 2М3 включает в себя дорожные транспортные средства, передвигающиеся вне хорошо развитой дорожной сети.
При сопоставлении спектров, приведенных в МЭК 60721-3-2:1997 и [23], возникает ряд вопросов, которые будут рассмотрены ниже.
В частности, важно, что спектры испытательных воздействий, установленные МЭК 60721-3-2:1997, не позволяют раскрыть все механизмы потенциальных повреждений оборудования. Разделение в МЭК 60721-3-2:1997 жесткости воздействия по трем категориям (стационарная случайная вибрация, стационарная гармоническая вибрация и нестационарная вибрация, включая удары) отличается от жесткостей воздействия, предусмотренных процедурами испытаний по [23]. В МЭК 60721-3-2:1997 два стационарных тестовых воздействия (случайное и гармоническое) рассматриваются в качестве альтернатив. В МЭК 60721-3-2:1997 не рассматриваются условия транспортной тряски, которым посвящен отдельный стандарт [27] серии [23], хотя в МЭК 60721-4-2 используется стандарт [27] для имитации ударных воздействий. Никаких сведений не приведено в отношении того, какие исходные предположения позволили разделить условия транспортирования по трем категориям воздействия, однако некоторые предположения можно сделать, исходя из публикаций [4] и [5]. Анализ этих публикаций позволяет прийти к выводу, что разбиение по указанным трем категориям сделано в первую очередь с учетом возможностей испытательного оборудования, имевшегося в 60-70-е годы прошлого века, а не с точки зрения воспроизведения условий, репрезентативных с точки зрения механизмов повреждений груза, имеющих место в процессе его перевозок автотранспортом. Ниже рассматривается, насколько указанное разделение по категориям обосновано с точки зрения сегодняшних представлений о реальных динамических воздействиях на автодорожном транспорте и возможностей современного испытательного оборудования.
1. Случайная вибрация. В качестве тестовых динамических воздействий обычно выбирают гауссовские случайные процессы. Из двух вариантов тестовых вибрационных воздействий этот представляется наиболее реалистичным. Однако при этом нижняя граница диапазона частот испытаний приходится на верхнюю границу диапазона, в котором сосредоточена энергия вибрации, обусловленная работой подвески автомобиля. На нижней границе диапазона частот испытаний амплитуды перемещения и скорости вибрации много ниже тех, что наблюдаются на практике. Таким образом, данное испытание не способно воспроизвести условия эксплуатации, приводящие к повреждениям тех видов, что связаны с большими значениями скорости или перемещения. В то время, когда составлялись стандарты на испытания, возможности воспроизведения больших перемещений и скоростей были весьма ограниченными. Однако эти ограничения могут быть преодолены с помощью современного испытательного оборудования, и в ряде стандартов установлены более жесткие условия воздействия вибрации. Не ясно также, почему верхний диапазон вибрации согласно МЭК 60721-3-2:1997 простирается до 2000 Гц, что не подтверждается сведениями из источников, рассмотренных в настоящем стандарте.
2. Удар. В испытаниях на удар согласно [24] применяют удар классической формы в виде полусинусоиды. Он не является представительным для ряда переходных процессов, в действительности наблюдаемых на практике при перевозке оборудования дорожным транспортом. Причиной установления испытательных воздействий именно такой формы являлись ограниченные возможности испытательного оборудования прошлых лет. Однако современное испытательное оборудование, применяемое для испытаний на вибрацию, позволяет воспроизводить и переходные процессы. Это обеспечивает воспроизведение более реалистичных условий транспортирования без использования дополнительного испытательного оборудования, такого как ударные стенды, и с меньшими затратами (нет необходимости перенастраивать оборудование с испытаний на вибрацию на испытания на удар). В некоторых отраслях для воспроизведения ударов, наблюдаемых при транспортировании, применяют вибростенды, воспроизводящие случайные воздействия с высокими значениями ускорения в течение коротких промежутков времени, что позволяет получить воздействие с заданным распределением ударов, наблюдаемым на практике. Иногда переходные процессы воспроизводят на фоне стационарной вибрации. К сожалению, стандарт [24] не позволяет приспособить его требования к современным потребностям в стабильных и экономичных испытаниях, более реалистично воссоздающих условия дорожного движения.
3. Гармоническая вибрация. Установление жесткости воздействия для испытаний на гармоническую вибрацию почти наверняка предшествовало определению жесткости случайной вибрации, но при этом не было сделано никаких попыток, чтобы согласовать условия этих двух испытаний. По всей видимости, испытания на гармоническую вибрацию с качанием частоты оставлены в современных стандартах только потому, что они позволяют использовать имеющееся, но устаревшее испытательное оборудование. Однако с точки зрения последствий воздействия на испытуемые образцы объяснить сохранение испытаний на гармоническую вибрацию затруднительно. Диапазон частот этих испытаний существенно отличается (ср. от 5 до 2000 Гц для случайной вибрации и от 1 до 500 Гц для гармонической вибрации). На нижней границе диапазона качания частоты перемещение и скорость принимают гораздо более высокие значения, чем в случае случайной вибрации. Если сравнивать результаты этих двух испытаний, используя какой-нибудь стандартный метод, например метод максимума ударного спектра (рисунки 68 и 69) или спектра усталостных повреждений (рисунок 70), то разница в результатах будет весьма заметной. Указанные испытания можно считать эквивалентными с точки зрения создаваемых повреждений только для очень ограниченного класса оборудования. Можно предположить, что в настоящее время для некоторых видов испытательного оборудования принудительно сохраняют возможность испытаний на гармоническую вибрацию с качанием частоты. Сохранять далее этот вид испытаний нет никаких практических оснований. Однако если возможность проведения таких испытаний сохранена, то их последствия должны быть сделаны сопоставимыми с последствиями испытаний на случайную вибрацию.
4. Транспортная тряска (для незакрепленных грузов). Хотя в МЭК 60721-3-2:1997 условия тряски не упоминаются, такие условия наблюдают на практике, и поэтому они включены сюда для полноты рассмотрения. Согласно [27] для воспроизведения условий транспортной тряски применяют механические вибростенды, предназначенные обеспечить гармонические колебания стола с амплитудой 25 мм и частотой приблизительно 4,5 Гц. Для создания такого движения вверх-вниз используют два кулачковых механизма, вращающихся с несколько отличающимися частотами. Испытуемое оборудование свободно размещают на вибростоле. Поскольку вид колебательного движения фиксирован, единственный параметр, которым может управлять пользователь - это длительность воздействия. Такое испытательное оборудование в целом способно воссоздать реальную вибрацию в вертикальном направлении, обусловленную работой подвески транспортного средства. Однако вызывает сомнение, что перемещения стола вниз, создаваемые оборудованием, в действительности так часто встречаются на практике. Другие используемые способы имитации транспортной тряски связаны с применением гидравлического или электродинамического вибростенда с большим ходом поршня. Такое оборудование позволяет пользователю управлять амплитудой и частотой возбуждения. Иногда также применяют комбинированное возбуждение в виде случайной вибрации и транспортной тряски без фиксации испытуемого оборудования на вибростоле. Но все эти подходы имеют свои проблемы и не определены процедурами по [23].
Из вышесказанного следует, что условия динамических нагрузок на дорожном транспорте не могут быть адекватно воспроизведены с точки зрения вызываемых ими повреждений оборудования с использованием методов, установленных [24] и [23]. Кроме того, ориентированность стандартов на устаревшие методы испытаний препятствует внедрению в практику более гибких и экономически эффективных процедур. В настоящее время существует возможность имитировать все динамические нагрузки, которым груз подвергается при перевозке автодорожным транспортом, с помощью одного испытания.
Условия динамических воздействий и жесткости испытаний, установленные в [24] и [23], не являются репрезентативными ни по отношению к реальным условиям транспортирования, ни в части воссоздания всех факторов, влияющих на появление повреждений оборудования в процессе транспортирования. Стандартизованные условия воздействий не охватывают весь диапазон колебаний подвесок автомобилей и позволяют воспроизвести в ходе испытаний типичные транспортные повреждения только для весьма ограниченного круга испытуемых объектов. Самый общий случай повреждений при транспортировке связан с соударениями разных частей оборудования между собой, что требует создания при испытаниях больших скоростей вибрации. Однако скорости вибрации по [24] и [23] ниже тех, что наблюдаются в реальных условиях транспортирования.
Отмечено, что не все оборудование чувствительно к воздействиям, обусловленным работой подвески. Однако решение о том, следует ли при испытаниях имитировать условия работы подвески, должен принимать изготовитель оборудования, и оно не может быть навязано стандартами [24] или [23]. МЭК 60721-3-2:1997 может только давать некоторые рекомендации изготовителю и помогать ему в выборе наиболее соответствующего производимому оборудованию режима испытаний.
Даже если оборудование нечувствительно собственно к колебаниям подвески, последняя может оказывать влияние на состояние оборудования в случае колебаний большой амплитуды. Это связано с тем, что работа подвески оказывает доминирующе влияние на отклик вибрации в диапазоне приблизительно до 100 Гц. Этот отклик в области, находящейся выше частоты собственных колебаний подвески вплоть до частот около 100 Гц, характеризуется спадающей частотной характеристикой с крутизной спада приблизительно 6 дБ/октава. Только на частотах выше 100 Гц преобладающий вклад в вибрацию начинают вносить колебания корпуса транспортного средства и трансмиссии. Стандартизованная жесткость вибрационного воздействия описывается постоянным уровнем спектра во всем диапазоне частот, и этот уровень определен, по-видимому, на основе вибрационного отклика на частоте 10 Гц.
В диапазоне средних частот вибрация определяется динамическими свойствами самого транспортного средства (его двигателя) и его трансмиссии. Уровень вибрации в этом диапазоне обычно составляет 0,001 g/Гц, а в редких случаях, при плохом состоянии двигателя и трансмиссии, - до 0,01 g
/Гц. Динамические воздействия по [23] попадают в этот диапазон, но их жесткость выше наблюдаемой в реальных условиях.
Примечательно, что для разных стандартизованных тестовых воздействий определены разные верхние границы диапазона частот испытаний. Эти различия существуют даже в пределах одной серии стандартов - [24] или [23], поскольку воздействия случайной и гармонической вибрации определены в разных диапазонах частот. Причина в том, что если в отклике доминирующим является влияние подвески и в области выше 10 Гц наблюдается спад отклика, то амплитуда составляющей в районе 500 Гц будет относительно мала. И наоборот, если влияние подвески на отклик незначительно (хорошее транспортное средство движется по хорошей дороге), то основная энергия отклика перемещается в область средних частот. В этом случае спад отклика начинается на частотах выше 200 Гц и только на частотах свыше 1000 Гц уровень вибрации становится относительно низким. На верхнюю границу диапазона частот испытаний может повлиять также учет упаковки, используемой при транспортировании оборудования, которая обычно защищает его от высокочастотной вибрации. Установление необоснованно высокой верхней границы диапазона частот испытаний может усложнить выбор испытательного оборудования (например, практически исключается применение гидравлических вибростендов) и уменьшить разрешение по частоте, что существенно для управления возбуждением на нижних частотах диапазона. Вместе с тем некоторые виды оборудования могут быть чувствительными именно к высокочастотному возбуждению. Опять-таки решение вопроса о возможности повреждений оборудования при воздействии составляющих на частотах свыше 500 Гц следует оставить за его изготовителем.
Среднеквадратичное значение широкополосной случайной вибрации по [24] и [23] по крайней мере в 8-10 раз превышает то, что получено в результате измерений на практике. Отчасти это объясняется высокой верхней границей диапазона частот испытаний - 2000 Гц. Однако и без учета этого фактора уровень испытательного воздействия превышает реальный более чем в два раза, что можно было бы считать приемлемым. Причиной такого значительного превышения среднеквадратичного значения (по [24] и [23]) уровня реальной вибрации является выбор формы спектра, которая слабо соответствует большинству результатов измерений, наблюдавшихся на практике. В настоящем стандарте уже рассматривалась, какой должна быть форма спектра, чтобы лучше соответствовать условиям реального воздействия.
Анализ источников показывает значительную вариативность условий динамических воздействий при транспортировании грузов автотранспортом. В настоящее время эту вариативность устраняют тем, что в качестве спектра испытательного воздействия берут огибающую реальных спектров. Такой подход вряд ли может быть принят большинством информированных пользователей. Ряд технических условий, принятых после публикации МЭК 60721-3-2:1997, использует другие стратегии для борьбы с указанной вариативностью, ни одна из которых пока не получила общего признания. Ситуация усложняется тем, что пользователь может проводить испытание оборудования, которое будет подвергнуто транспортной вибрации, с разными целями. Не во всех случаях задачей является получение гарантии отсутствия повреждений после перевозки, поскольку такие гарантии зачастую сопряжены со значительными затратами по упаковке и другим мерам защиты. В этом случае для описания условий динамических воздействий с успехом может быть применено вероятностное распределение мгновенных значений ускорения. Пользователь может самостоятельно выбрать тот уровень жесткости воздействия, который соответствует заданному им уровню доверия в условиях конкретной ситуации. Однако это требует включения в МЭК 60721-3-2:1997 более точных описаний условий динамических воздействий при перевозках автотранспортом.
Что касается ударных воздействий, то их природой могут быть как неровности дороги, так и соударения оборудования с платформой транспортного средства. Такое различие в природе удара требует разных подходов к анализу. В настоящее время в МЭК 60721-3-2:1997 двойственная природа ударов не принимается во внимание. Такое положение дел нельзя считать приемлемым, поскольку хорошая конструкция оборудования или его упаковки может снижать эффект транспортной тряски, что не принимается во внимание при установлении жесткости ударного воздействия. Ниже рассмотрены особенности для двух источников ударного воздействия.
1. Дорожные неровности. Жесткости ударных воздействий по МЭК 60721-3-2:1007 и [23] основаны, по-видимому, на исследованиях [4] и [5]. Установленные уровни мало соответствуют реальным условиям воздействий для современных автомобилей. Распределения мгновенных значений при реальных ударных воздействиях получены в исследованиях SRETS и CEEES. Такая форма представления данных является более удобной для установления жесткости воздействия, поскольку позволяет пользователю выбрать жесткость, исходя из заданного значения уровня доверия для каждой конкретной ситуации. Для современных транспортных средств можно предложить снизить для большего согласия с практикой уровни воздействия для класса 2М1 вдвое. Уровни для класса 2М2 должны быть теми же, что и для 2М1, что отразит в целом улучшившееся состояние дорог и массовое применение пневматических подвесок. Данных в отношении класса 2М3 недостаточно, чтобы сформулировать какие-либо рекомендации, но в целом нет свидетельств, что для него уровни воздействия должны превышать действующие в настоящее время уровни для 2М2. Даже при этом жесткость воздействия будет существенно превышать наблюдавшуюся на испытательных полигонах согласно источникам, рассмотренным в настоящем стандарте. Представляется, что стандартизованная жесткость воздействия для класса 2М3 не имеет серьезного обоснования и превышает жесткость воздействия даже для условий, характерных для внедорожных машин военного назначения.
2. Транспортная тряска. Действующие стандартизованные испытания на транспортную тряску основаны, по-видимому, на условиях, характерных для машин военного назначения, поэтому неудивительно, что испытания такого вида редко используют для серийных транспортных средств и перевозимых ими грузов. Сегодня многие коммерческие грузы перевозят без фиксации, которая бы полностью или в большой степени исключила их перемещения в вертикальном направлении. В этом случае будут наблюдаться соударения между перевозимым оборудованием (его упаковкой) и платформой транспортного средства. Исследования SRETS (без информирования водителя) показали, что транспортная тряска наблюдается на относительно небольших отрезках пути и в большей степени обусловлена индивидуальной манерой вождения. Пиковые ударные ускорения зависят от жесткости упаковки и массы груза в упаковке. Измерения SRETS были выполнены для загруженного автомобиля с жестким поддоном. При этом наблюдались относительно высокие и короткие ударные импульсы. В условиях малой загруженности автомобиля и мягкой упаковки эти импульсы не будут такими высокими, но будут растянутыми во времени. Транспортную вибрацию можно связать либо с вибрацией с высокими пиковыми значениями ускорения либо с повторяющимися ударами. В любом случае жесткость воздействия целесообразно формулировать через распределение мгновенных значений, что позволит выбрать жесткость, исходя из заданного значения уровня доверия для каждой конкретной ситуации. Формирование тестовых воздействий требует учета жесткости упаковки и массы груза. Поскольку указанные факторы могут варьироваться в широких пределах, формирование единых условий испытаний было бы необоснованным. Представляется, что лучшее, что может дать МЭК 60721-3-2:1997, - это определить условия, которые могут быть связаны с соударениями между платформой и перевозимым оборудованием.
9 Заключение
В настоящем стандарте рассмотрены данные из трех основных источников, содержащих достаточно большой объем информации и позволяющих провести проверку качества данных. Эти источники описывают динамические воздействия для семи современных (по большей части) транспортных средств разной грузоподъемности. Данные были получены в результате испытаний как на обычных дорогах, так и на испытательных полигонах в условиях как информирования водителей о цели испытаний, так и без их оповещения. Кроме того, использованы данные трех дополнительных источников, также пользующихся хорошей репутацией, но объема этих данных недостаточно для проверки и подтверждения их качества. Рассмотрена была также информация из источника, который, по всей видимости, лег в основу формирования жесткостей тестовых воздействий в МЭК 60721-3-2:1997.
По большей части данные из каждого источника хорошо согласуются не только между собой, но и с аналогичными данными других источников. Ни для одного их источников не обнаружено выпадающих результатов наблюдений до такой степени, чтобы поставить качество данных под сомнение. Однако из собранной информации ясно, условия динамических воздействий при перевозке грузов автодорожным транспортом сложны и подвержены влиянию многих факторов. Тем не менее по собранным данным удалось восстановить ряд закономерностей, подтверждаемых большинством источников.
Жесткость воздействия для стационарной случайной вибрации, установленная МЭК 60721-3-2:1997 (таблица 5, категория b), охватывает все условия транспортирования, включая перевозку автодорожным транспортом. Однако, по-видимому, эти тестовые воздействия существенно отличаются от наблюдаемых на практике. То же самое можно сказать в отношении жесткости ударных воздействий, установленных МЭК 60721-3-2:1997 (таблица 5, категория c).
Собранные данные обнаруживают существенное расхождение с условиями воздействий, определенных в [24] и [23], а именно:
a) уровни вибрации, определенные МЭК 60721-3-2:1997, непредставительны для воздействий, наблюдаемых на автодорожном транспорте. Полное описание таких воздействий представляет собой сложную задачу, но оно должно позволять пользователю выбирать такие жесткости воздействия, которые наилучшим образом могли бы выявлять потенциальные повреждения конкретного транспортируемого оборудования;
b) описание воздействий в МЭК 60721-3-2:1997 малопригодно с точки зрения прогнозирования возможных повреждений при перевозке автодорожным транспортом. В то же время ясно, что не всем пользователям МЭК 60721-3-2:1997 требуется проведение исследований механизмов повреждений в полном объеме. Это, в частности, относится к случаям, когда перевозке подлежат самые разнообразные грузы в разной упаковке;
c) разделение воспроизводимых условий динамических воздействий на автодорожном транспорте на испытания на случайную вибрацию и удар основано на возможностях устаревшего испытательного оборудования. Современное оборудование позволяет не только более точно воспроизвести реальные условия динамических воздействий на автодорожном транспорте, но и выполнить испытания с меньшими затратами. Однако применение современного испытательного оборудования требует глубокого пересмотра подходов, примененных в МЭК 60721-3-2:1997;
d) жесткости динамических воздействий по МЭК 60721-3-2:1997 и [23] призваны охватить самые худшие условия транспортирования. В современных условиях перевозок грузов автодорожным транспортом многие пользователи склонны считать такой запас по уровню воздействия избыточным и чрезмерно затратным. В последнее время составлен ряд спектров тестовых воздействий, которые в большей степени учитывают разнообразие факторов, влияющих на условия транспортирования.
Таблица 1 - Маршруты перевозок по программе SRETS
Маршрут движения | Способ перевозки | Общая длина маршрута, км | Общее число перевозок |
По Великобритании | |||
Думбартон - Девентри | Автодорожный | 550 | 19 (с шестью перерывами) |
По Европе | |||
Думбартон - Гринок | Автодорожный | 1920 (включая 420 по железной дороге) | 1 |
Гринок- Бильбао | Морской | ||
Бильбао - Мадрид | Железнодорожный | ||
Мадрид, ж/д станция - база | Автодорожный | ||
Думбартон - Дувр | Автодорожный | 1935 | 1 |
Дувр - Кале | Морской | ||
Кале - Мадрид | Автодорожный | ||
Думбартон - Дувр | Автодорожный | 2325 | 1 |
Дувр - Кале | Морской | ||
Кале - Лиссабон | Автодорожный | ||
Таблица 2 - Сводка данных по числу испытаний, проведенных фирмой "Бош" с участием разных транспортных средств в разных условиях испытаний
Категория и обозначение дорог | Скорость движения, км/ч | Транспортное средство 1 (V1) | Транспортное средство 2 (V2) | Транспортное средство 3 (V3) | |||
Загру- | Загру- | Загру- | Загру- | Загру- | |||
Полигон (разбитая дорога) | R1 | 30 | 2 | 2 | 2 | 3 | - |
50 | 2 | 2 | 2 | 3 | 3 | ||
Полигон (дорога с буграми) | R2 | 30 | 2 | 2 | 2 | 2 | 5 |
50 | 2 | 2 | 2 | 2 | 2 | ||
Обычная дорога | R3 | 50 | 1 | - | 1 | 1 | - |
60 | 4 | - | 4 | 4 | - | ||
Шоссе | R4 | 70 | 5 | - | 5 | 5 | - |
| |||||||
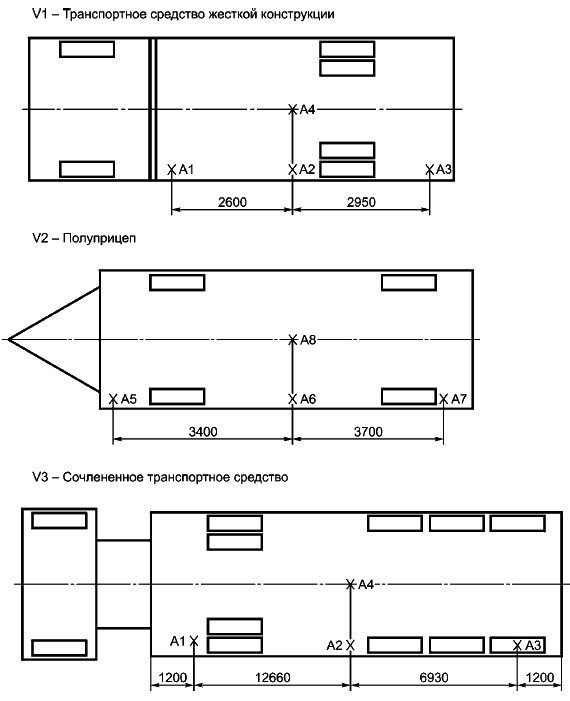
Рисунок 1 - Схематическое изображение транспортных средств, использованных в испытаниях по программе SRETS
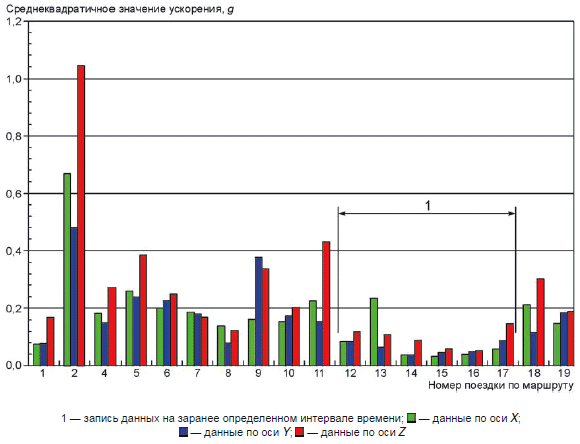
Рисунок 2 - Среднеквадратичные значения ускорения по измерениям программы SRETS без оповещения водителей о цели испытаний
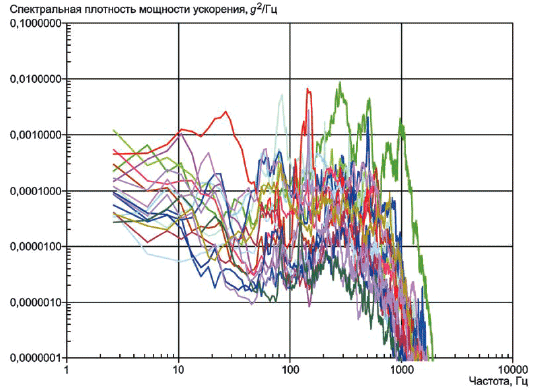
Рисунок 3 - Спектральные плотности мощности ускорения по измерениям программы SRETS без оповещения водителей о цели испытаний
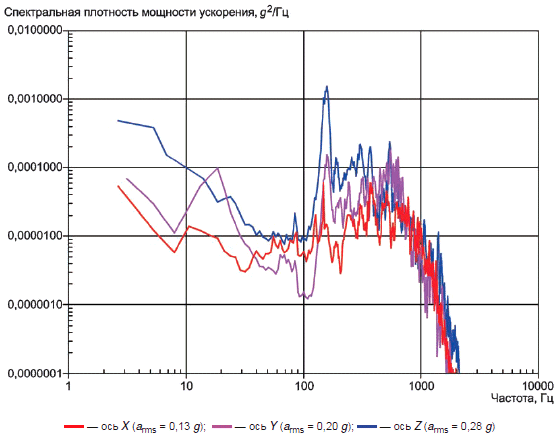
Рисунок 4 - Сравнение результатов измерений программы SRETS по трем осям
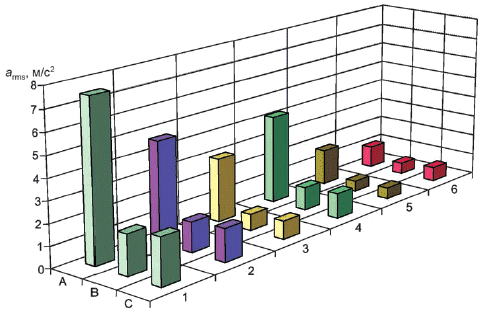
A - испытательный полигон; B - шоссе; C - обычная дорога; 1 - грузовой автомобиль, ось Z; 2 - прицеп, ось Z; 3 - полуприцеп, ось Z; 4 - грузовой автомобиль, оси X, Y; 2 - прицеп, оси X, Y; 3 - полуприцеп, оси X, Y; - среднеквадратичное значение ускорения
Рисунок 5 - Сравнение результатов измерений программы SRETS, проведенных с оповещением водителей о цели испытаний
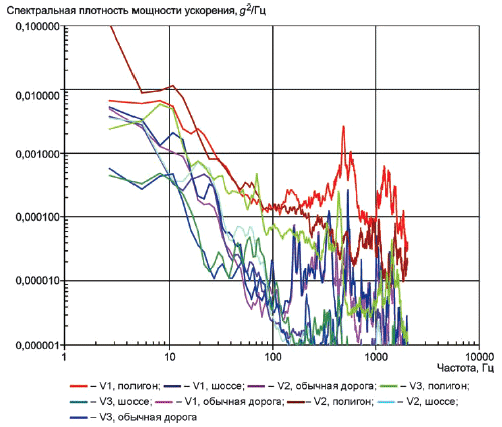
Рисунок 6 - Сравнение результатов измерений программы SRETS для разных транспортных средств и категорий дорог с оповещением о цели испытаний
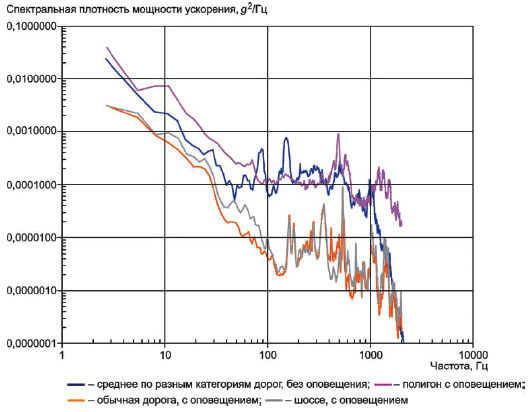
Рисунок 7 - Сравнение результатов измерений вибрации в вертикальном направлении по программе SRETS для разных категорий дорог с оповещением и без оповещения водителей о цели испытаний
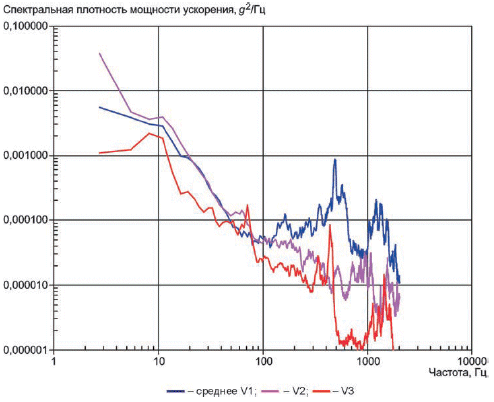
Рисунок 8 - Сравнение результатов измерений вибрации в вертикальном направлении по программе SRETS на грузовой платформе для разных транспортных средств (усреднение по категории дорог) с оповещением водителей о цели испытаний
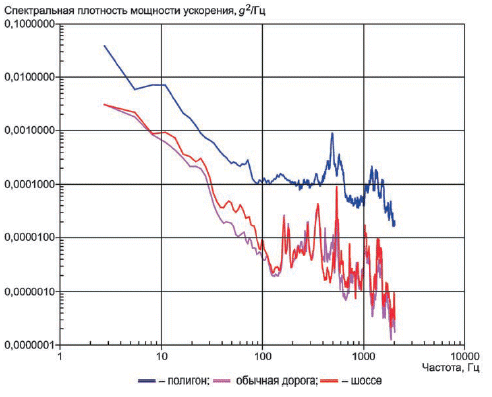
Рисунок 9 - Сравнение результатов измерений вибрации в вертикальном направлении по программе SRETS для разных категорий дорог (усреднение по транспортным средствам) с оповещением водителей о цели испытаний
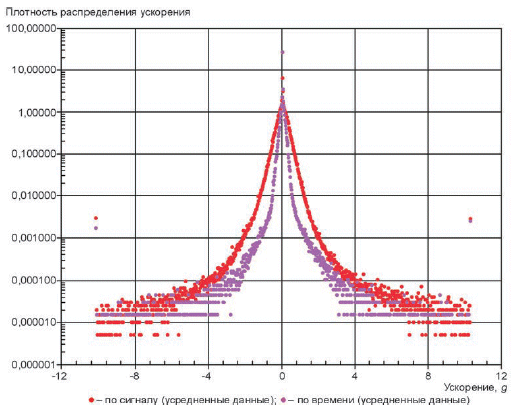
Рисунок 10 - Сравнение результатов измерений программы SRETS в вертикальном направлении по сигналу и по времени без оповещения водителей о цели испытаний
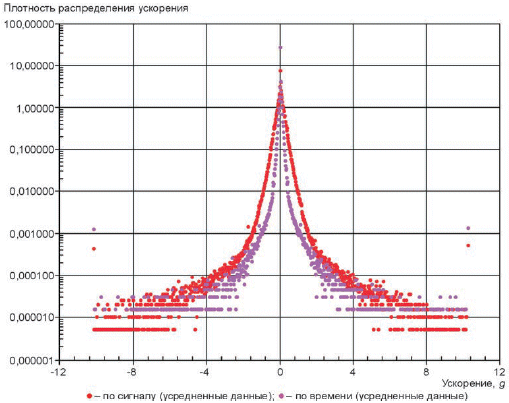
Рисунок 11 - Сравнение результатов измерений программы SRETS в продольном направлении по сигналу и по времени без оповещения водителей о цели испытаний
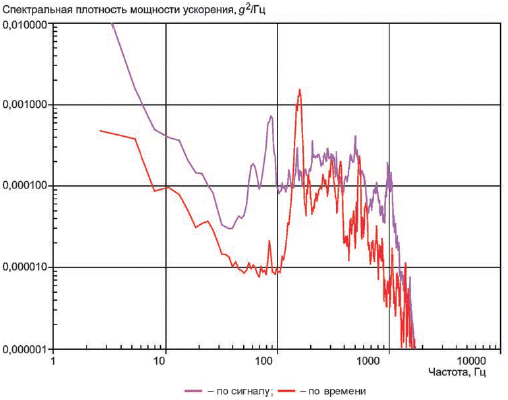
Рисунок 12 - Сравнение результатов измерений программы SRETS (усредненные спектры ускорения в вертикальном направлении) по сигналу (=0,47 g) и по времени (
=0,28 g) без оповещения водителей о цели испытаний
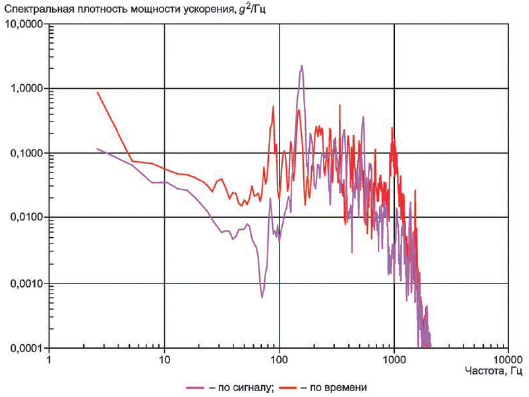
Рисунок 13 - Сравнение результатов измерений программы SRETS (огибающие спектров ускорения в вертикальном направлении) по сигналу (=9,0 g) и по времени (
=8,9 g) без оповещения водителей о цели испытаний
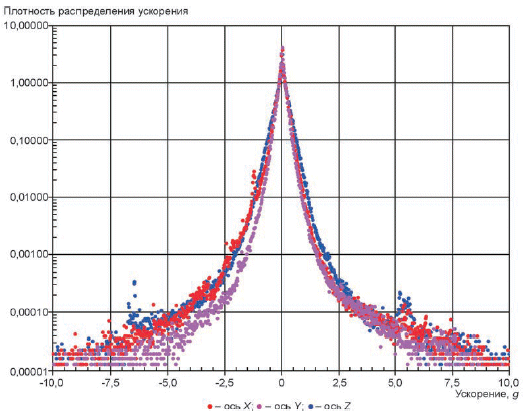
Рисунок 14 - Результаты измерений программы SRETS (распределения усредненных данных по разным направлениям) без оповещения водителей о цели испытаний
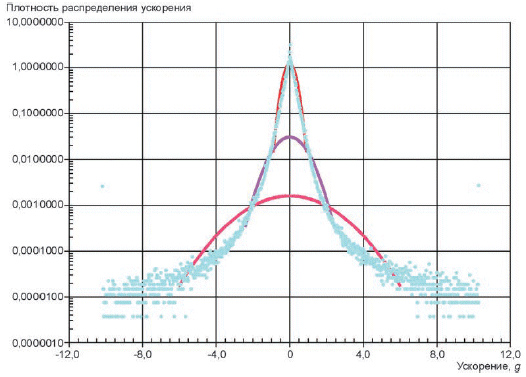
Рисунок 15 - Подгонка результатов измерений программы SRETS (распределение мгновенных значений) кривыми гауссовского распределения
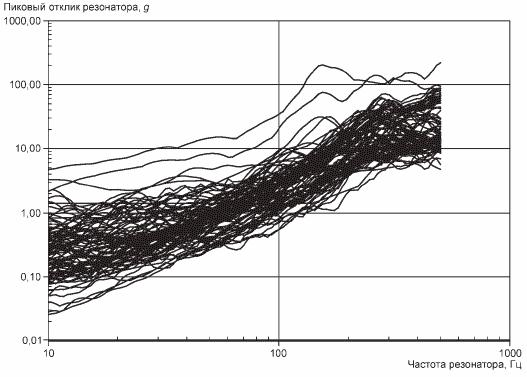
Рисунок 16 - Ударные спектры по измерениям программы SRETS в вертикальном направлении для ускорений более 5 g (добротность Q=10) без оповещения водителей о цели испытаний
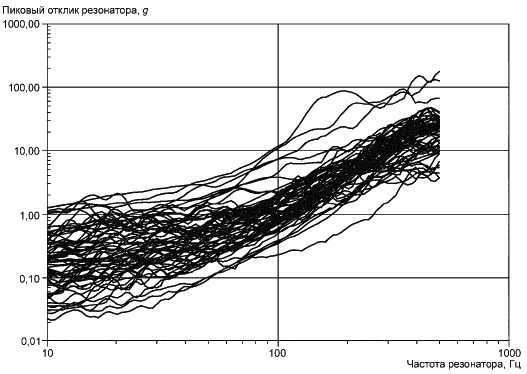
Рисунок 17 - Ударные спектры по измерениям программы SRETS в поперечном направлении для ускорений более 5 g (добротность Q=10) без оповещения водителей о цели испытаний
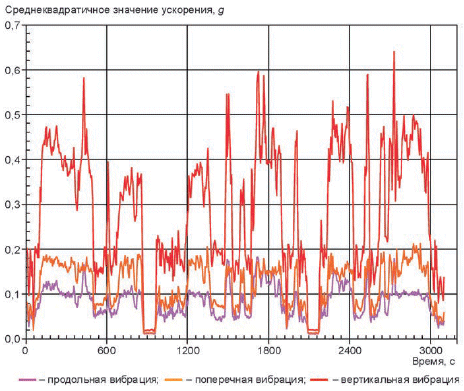
Рисунок 18 - Изменение среднеквадратичных значений ускорения (на интервале 5 с) со временем в измерениях CEEES
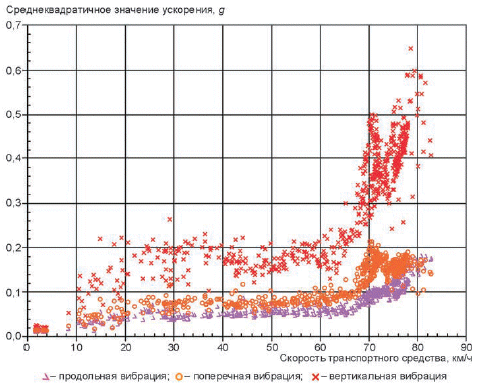
Рисунок 19 - Изменение среднеквадратичных значений ускорения (на интервале 5 с) с изменением скорости транспортного средства в измерениях CEEES
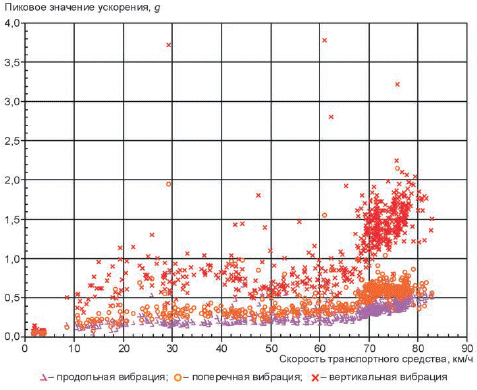
Рисунок 20 - Изменение пиковых значений ускорения (на интервале 5 с) с изменением скорости транспортного средства в измерениях CEEES
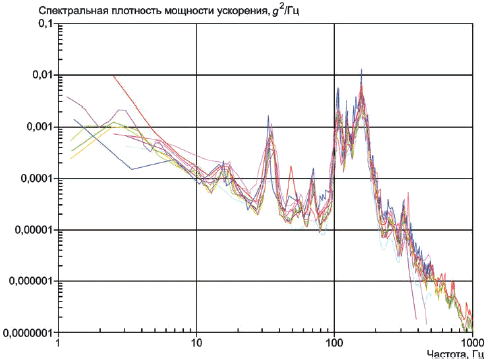
Рисунок 21 - Сравнение спектральных плотностей мощности ускорения в круговых испытаниях CEEES
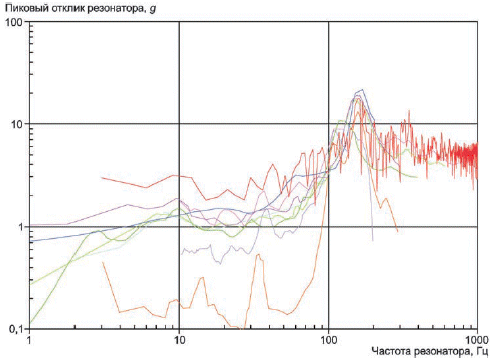
Рисунок 22 - Сравнение ударных спектров ускорения (добротность Q=10) в круговых испытаниях CEEES
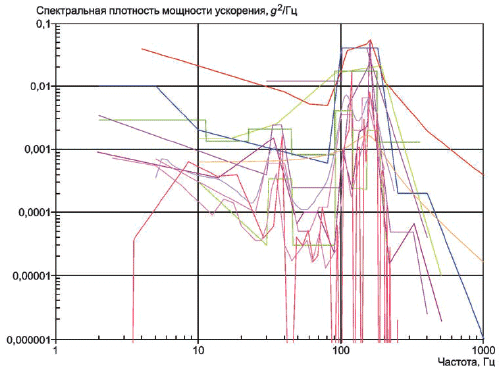
Рисунок 23 - Тестовые воздействия, построенные по результатам круговых испытаний CEEES
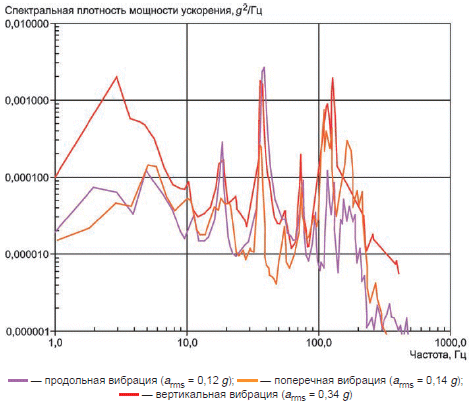
Рисунок 24 - Спектральные плотности мощности, усредненные по результатам круговых испытаний CEEES (длина записи 25400 с, разрешение по частоте 1 Гц)
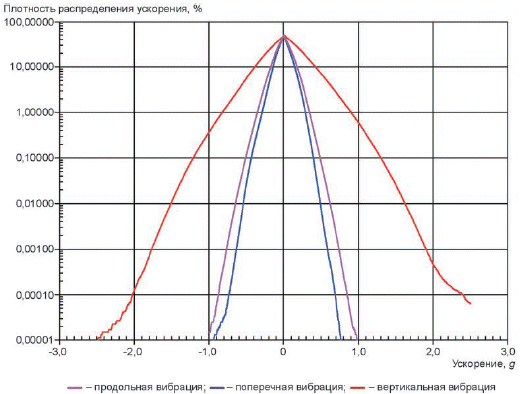
Рисунок 25 - Плотности распределения, усредненные по результатам круговых испытаний CEEES
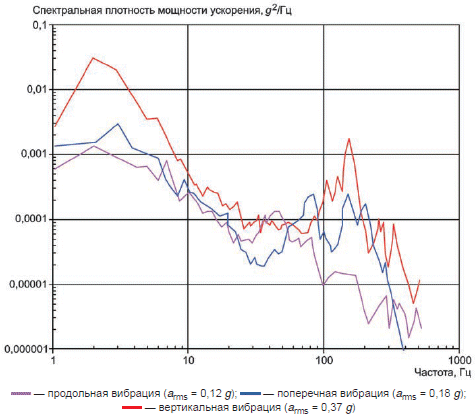
Рисунок 26 - Спектральные плотности распределения для измерений CEEES по разбитым дорогам (скорость 24 км/ч)
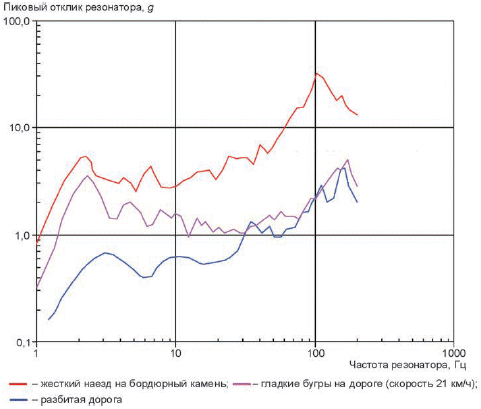
Рисунок 27 - Ударные спектры по измерениям CEEES (добротность Q=10)
Таблица 3 - Сводка данных по измерениям Хоппе и Герока
Транспортное средство | Изготовитель | Модель | Год выпус- | Макси- | Масса без загруз- | Размер плат- | Тип подвески |
Минивэн | Volkswagen | 1970 | 2,2 | 1,25 | 1,6 | Торсионная | |
4-тонный автомобиль | Daimler-Benz | L405 | 1964 | 3,9 | 1,9 | 3,0 | Рессорная |
10-тонный автомобиль | MAN | 520H | 1962 | 10,2 | 4,5 | 5,5 | Рессорная |
22-тонный автомобиль | Daimler-Benz | LP222 | 1970 | 22 | 8,4 | 7,1 | Рессорная |
16-тонный прицеп | Moessbauer | 1961 | 16 | 4,4 | 7,0 | Рессорная | |
25-тонный прицеп | Kaessbohrer | 1946 | 25 | 6,0 | 11,0 | Рессорная | |
Седельный тягач с полуприцепом | Henschel | 520F/6 | 1964 | 16 | 6,1 | Рессорная | |
22-тонный автомобиль | Buessing | BS22L | 1971 | 22 | 9,0 | 7,1 | Пневматичес- |
12-тонный прицеп | Ackermann | 1970 | 16 | 3,7 | 7,1 | Пневматичес- |
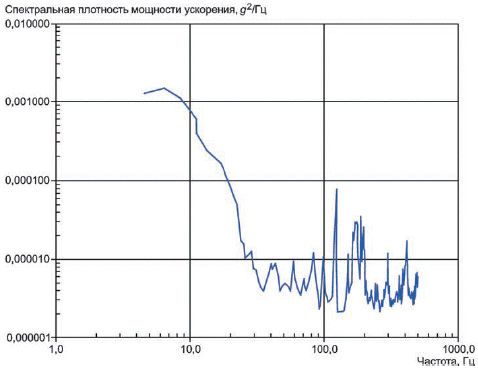
Рисунок 28 - Типичная спектральная плотность мощности ускорения по измерениям Хоппе и Герока
Таблица 4 - Регистрация ударов в измерениях Хоппе и Герока
Транспортное средство | Загру- | Харак- | Число ударов выше заданного уровня | ||||
>3 g | >5 g | >10 g | >12 g | > 15 g | |||
Минивэн | 80 | М | 400 | 90 | 4 | 6 | - |
80 | Е | 3000 | 700 | 50 | - | - | |
4-тонный грузовой автомобиль | 65 | М | 10000 | 200 | 150 | 40 | 1 |
65 | Е | 40000 | 6000 | 50 | 150 | 6 | |
10-тонный грузовой автомобиль | 20 | М | 20000 | 2000 | 100 | 40 | 1 |
20 | Е | 50000 | 6000 | 400 | 150 | 5 | |
55 | М | 6000 | 50 | - | - | - | |
55 | Е | 20000 | 200 | 1 | - | - | |
22-тонный грузовой автомобиль | 10 | М | 2000 | 20 | 5 | - | - |
10 | Е | 6000 | 70 | 15 | 1 | - | |
90 | М | 800 | 40 | - | - | - | |
90 | Е | 1000 | 100 | - | - | - | |
Седельный тягач с полуприцепом | 6 | М | 20000 | 2000 | 100 | 30 | 1 |
6 | Е | 70000 | 10000 | 450 | 90 | 2 | |
50 | М | 5000 | 500 | 5 | - | - | |
50 | Е | 20000 | 1500 | 15 | 1 | - | |
25-тонный прицеп | 0 | М | 7000000 | 20000 | 450 | 150 | 30 |
0 | Е | 5000000 | 50000 | 1500 | 500 | 130 | |
70 | М | 3000 | 3000 | 900 | 500 | 5 | |
70 | Е | 10000 | 2500 | 400 | 150 | 20 | |
Грузовой автомобиль с пневматической подвеской | 7 | М | 800 | 90 | 1 | - | - |
7 | Е | 1500 | 170 | 3 | - | - | |
89 | М | 2 | - | - | - | - | |
89 | Е | 6 | - | - | - | - | |
Прицеп с пневматической подвеской | 0 | М | 60000 | 7000 | 270 | 100 | 8 |
0 | Е | 160000 | 22000 | 800 | 100 | 30 | |
57 | М | 2200 | 110 | 15 | 5 | - | |
57 | Е | 20000 | 700 | 2 | - | - | |
| |||||||
Таблица 5 - Распределение длительности ударов в измерениях Хоппе и Герока
Транспортное средство | Доля распределения, %, длительности удара, превышающей заданное значение | |||
>1 мс | >10 мс | >50 мс | >80 мс | |
Минивэн | 25 | 3 | 0,1 | 0,03 |
Грузовой автомобиль | 57 | 10 | 1 | 0,2 |
Полуприцеп | 64 | 27 | 6 | 4 |
Прицеп | 33 | 10 | 6 | 2 |
Транспортное средство с пневматической подвеской | 91 | 4 | 0,02 | - |
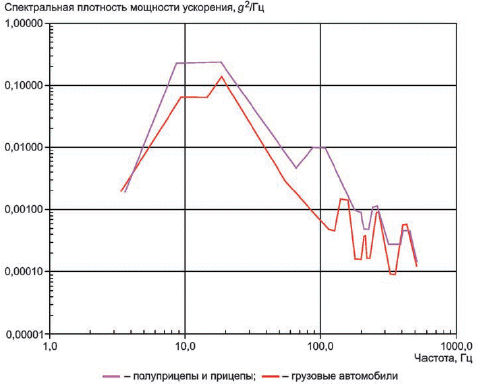
Рисунок 29 - Огибающая спектров по измерениям Хоппе и Герока
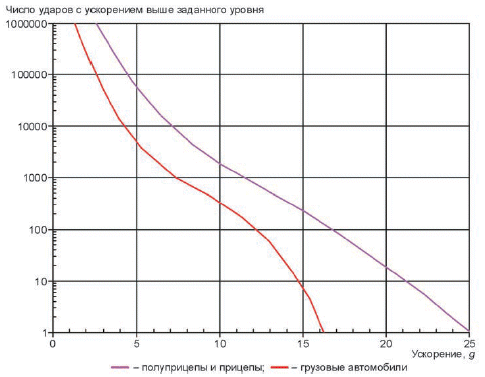
Рисунок 30 - Число ударов на 100 км пути по измерениям Хоппе и Герока
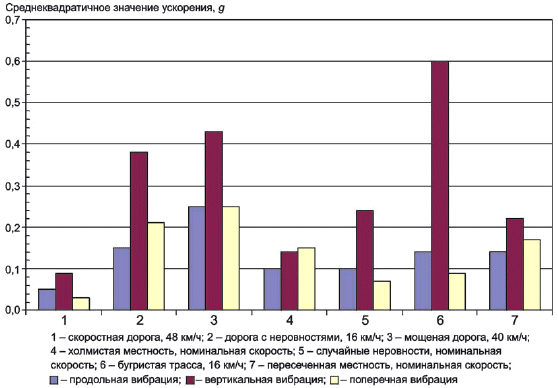
Рисунок 31 - Среднеквадратичные значения ускорения по измерениям на полигоне в Милбруке (Land Rover)
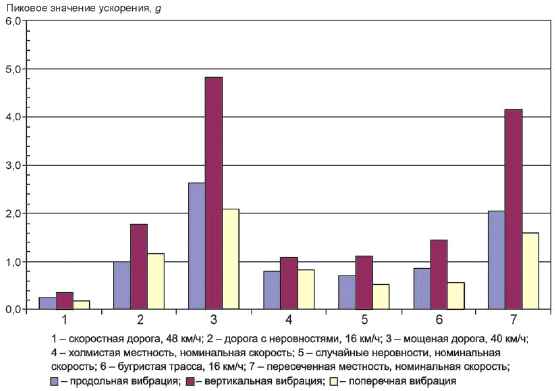
Рисунок 32 - Пиковые значения ускорения по измерениям на полигоне в Милбруке (Land Rover)
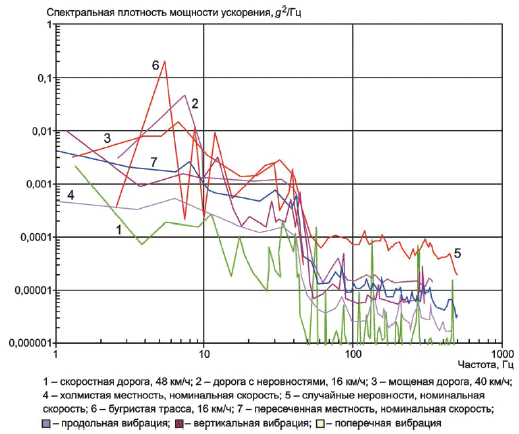
Рисунок 33 - Спектры по измерениям на полигоне в Милбруке (Land Rover)
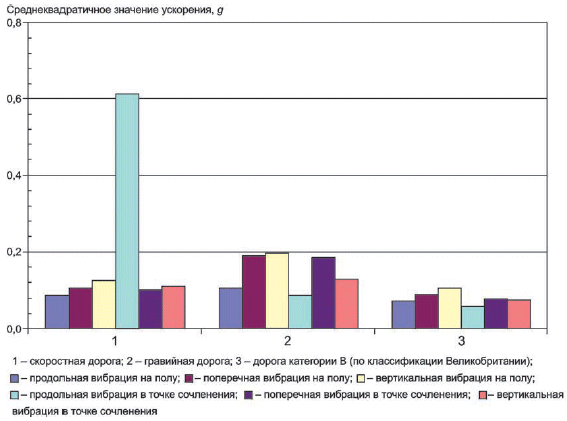
Рисунок 34 - Среднеквадратичные значения ускорения по измерениям на полигоне в Милбруке (Transit Van)

Рисунок 35 - Пиковые значения спектров по измерениям на полигоне в Милбруке (Transit Van)
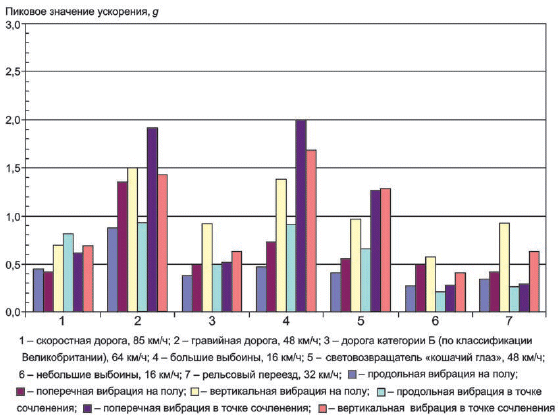
Рисунок 36 - Пиковые значения ударов по измерениям на полигоне в Милбруке (Transit Van)
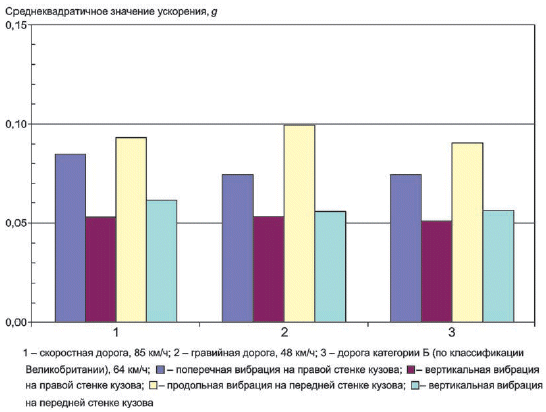
Рисунок 37 - Среднеквадратичные значения ускорения по измерениям на полигоне в Милбруке (Renault Magnum)
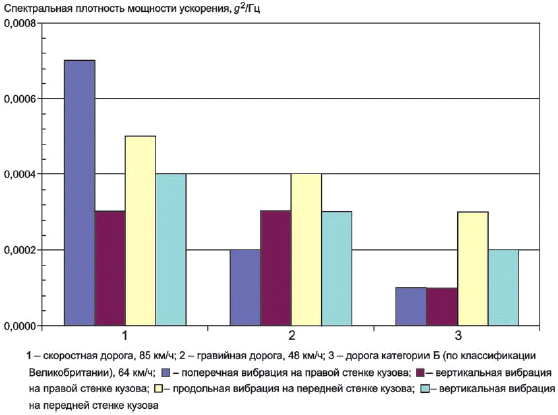
Рисунок 38 - Пиковые значения спектров по измерениям на полигоне в Милбруке (Renault Magnum)
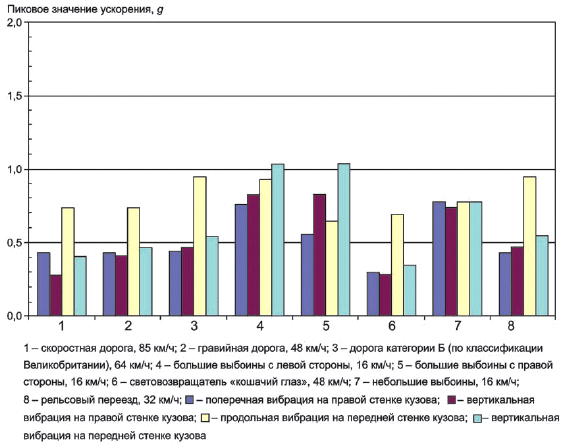
Рисунок 39 - Пиковые значения ударов по измерениям на полигоне в Милбруке (Renault Magnum)
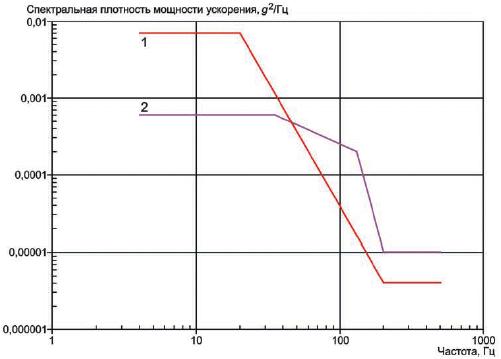
1 - Ford Transit; 2 - Renault Magnum
Рисунок 40 - Огибающие спектров по измерениям на полигоне в Милбруке (Renault Magnum и Ford Transit)
Таблица 6 - Результаты измерений вибрации по [9] на автомобиле Renault Traffic
Категория дороги и скорость движения | Среднеквадратичное значение ускорения, g | ||
Ось X (продольная) | Ось Y (поперечная) | Ось Z (вертикальная) | |
Автострада (главная магистраль), 130 км/ч | 0,15 | 0,19 | 0,23 |
Вспомогательная магистраль, 90 км/ч | 0,08 | 0,10 | 0,11 |
Вспомогательная магистраль, 60 км/ч | 0,06 | 0,09 | 0,08 |
Дорога с капитальным покрытием, 90 км/ч | 0,11 | 0,12 | 0,20 |
Дорога с капитальным покрытием, 60 км/ч | 0,09 | 0,09 | 0,15 |
Сельская местность | 0,05 | 0,06 | 0,08 |
Бельгийская мостовая | 0,11 | 0,10 | 0,14 |
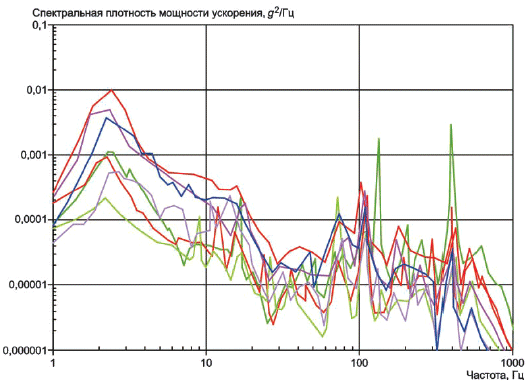
Рисунок 41 - Спектральные плотности мощности ускорения в вертикальном направлении по [9] (Renault Traffic)
Таблица 7 - Результаты измерений вибрации по [9] на автомобиле RVI TRM 10000
Категория дороги и скорость движения | Среднеквадратичное значение ускорения, g | ||
Ось X (продольная) | Ось X (продольная) | Ось X (продольная) | |
Дорога с капитальным покрытием, 60 км/ч | 0,11 | 0,16 | 0,17 |
Дорога с капитальным покрытием, 75 км/ч | 0,14 | 0,21 | 0,25 |
Дорога с улучшенным покрытием | 0,16 | 0,26 | 0,26 |
Дорога общего применения, максимальная скорость | 0,08 | 0,12 | 0,17 |
Дорога общего применения, 80% максимальной скорости | 0,13 | 0,19 | 0,40 |
Дорога общего применения, максимальная скорость | 0,09 | 0,14 | 0,28 |
Дорога общего применения, 80% максимальной скорости | 0,08 | 0,13 | 0,18 |
Дорога общего применения, максимальная скорость | 0,10 | 0,15 | 0,26 |
Дорога общего применения, 80% максимальной скорости | 0,07 | 0,10 | 0,15 |
Дорога общего применения, максимальная скорость | 0,11 | 0,17 | 0,29 |
Дорога общего применения, 80% максимальной скорости | 0,08 | 0,13 | 0,20 |
Дорога общего применения, максимальная скорость | 0,14 | 0,22 | 0,30 |
Дорога общего применения, 80% максимальной скорости | 0,10 | 0,16 | 0,22 |
Дорога общего применения, 23,5 км/ч | 0,41 | 0,31 | 0,61 |
Дорога общего применения, 13,5 км/ч | 0,16 | 0,19 | 0,44 |
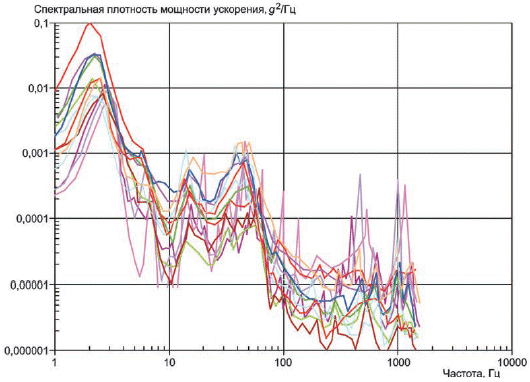
Рисунок 42 - Спектральные плотности мощности ускорения в вертикальном направлении (максимальные = 0,4 g,
=142 мм) по [9] (RVI TRM 10000)
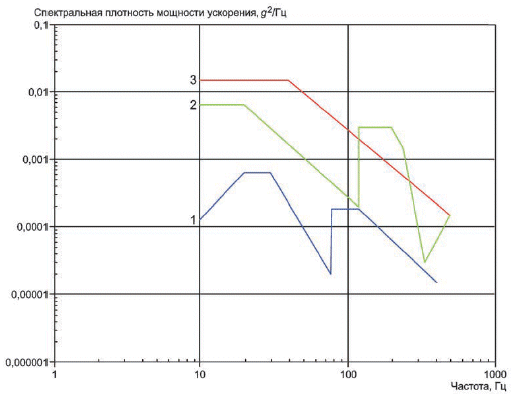
1 - поперечная вибрация (=0,20 g,
=0,46 мм); 2 - продольная вибрация (
=0,74 g,
=2,1 мм); 3 - вертикальная вибрация (
=1,04 g,
=3,3 мм)
Рисунок 43 - Тестовые воздействия (длительность 60 мин на 1600 км) по [10]
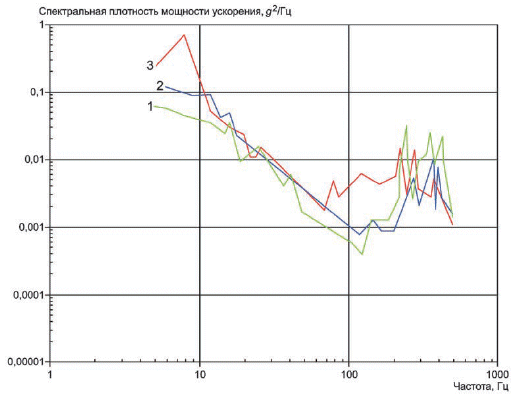
1 - продольная вибрация (=1,96 g,
=17,4 мм); 2 - поперечная вибрация (
=1,6 g,
=25,6 мм); 3 - вертикальная вибрация (
=2,2 g,
=17,4 мм)
Рисунок 44 - Тестовые воздействия (длительность 120 мин на 800 км) по [11]
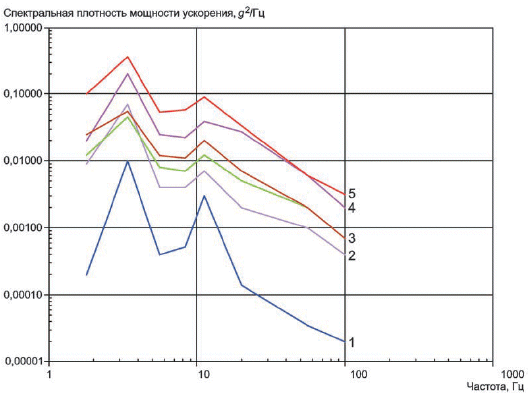
1 - производственные территории; 2 - внутригородские дороги; 3 - пригородные дороги; 4 - второстепенные пригородные дороги; 5 - основные пригородные дороги
Рисунок 45 - Данные измерений для автомобилей с листовыми рессорами по [12]
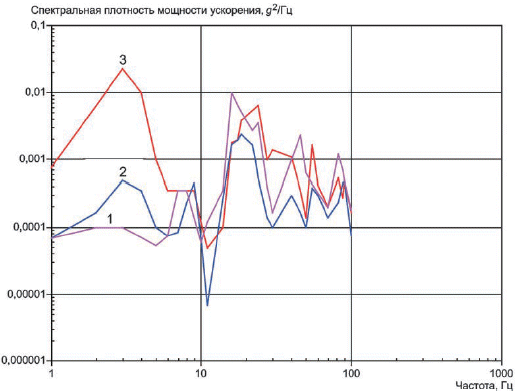
1 - поперечная вибрация; 2 - продольная вибрация; 3 - вертикальная вибрация
Рисунок 46 - Данные измерений вибрации на прицепе с листовыми рессорами, перевозящим груз массой 18144 кг со скоростью 88 км/ч по бетонному шоссе по [13]
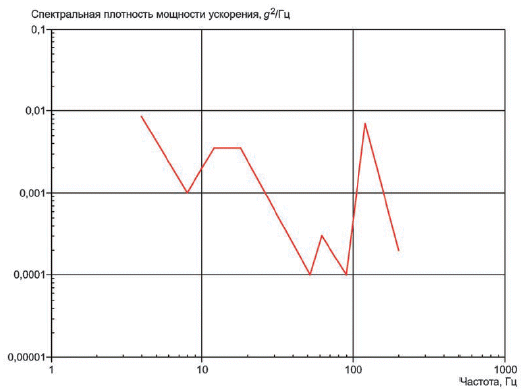
1 - поперечная вибрация; 2 - продольная вибрация; 3 - вертикальная вибрация
Рисунок 47 - Данные измерений вертикальной вибрации 15-тонного грузового автомобиля, движущегося по городским и пригородным дорогам, по [14]
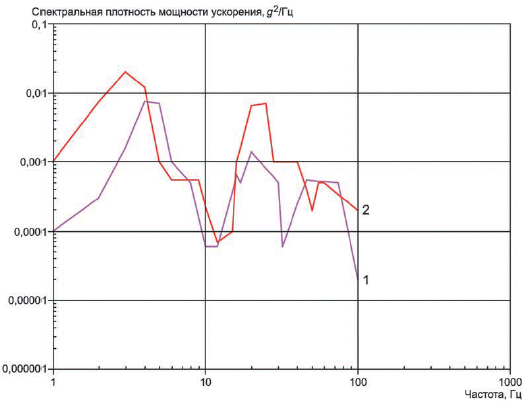
1 - масса перевозимого груза 3183 кг; 2 - масса перевозимого груза 18182 кг
Рисунок 48 - Данные измерений вибрации прицепа с листовыми рессорами по [16]
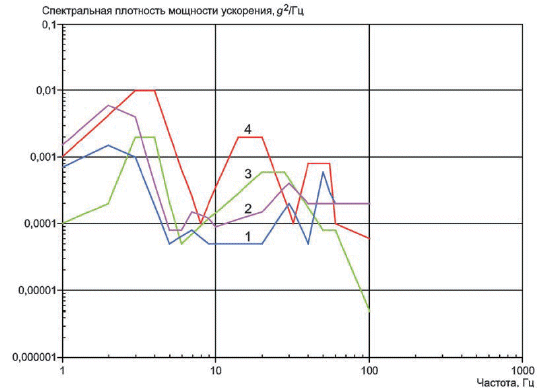
1 - пневматическая подвеска, масса груза 2268 кг; 2 - пневматическая подвеска, масса груза 8165 кг; 3 - листовые рессоры, масса груза 18144 кг; 4 - листовые рессоры, масса груза 9072 кг
Рисунок 49 - Данные измерений вибрации грузового автомобиля с прицепом по [13]
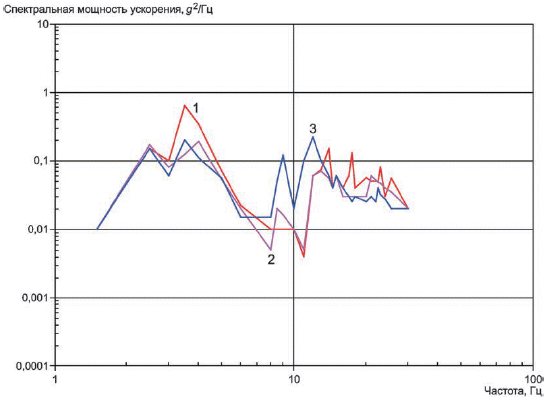
1 - междугородние перевозки; 2 - перевозки по автостраде; 3 - внутригородские перевозки
Рисунок 50 - Данные измерений вибрации прицепа по [16]
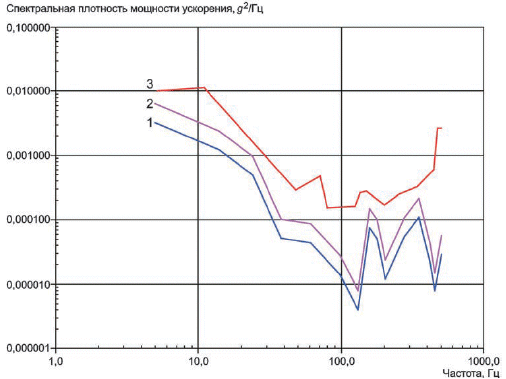
1 - хорошее дорожное покрытие, =0,21 g; 2 - плохое дорожное покрытие,
=0,3 g; 3 - очень плохое дорожное покрытие,
=0,61 g
Рисунок 51 - Тестовые воздействия в вертикальном направлении по SRETS [три уровня жесткости испытаний по перемещению: высокий (=7,7 мм), средний (
=5,3 мм) и низкий (
=3,8 мм)] на основе спектра
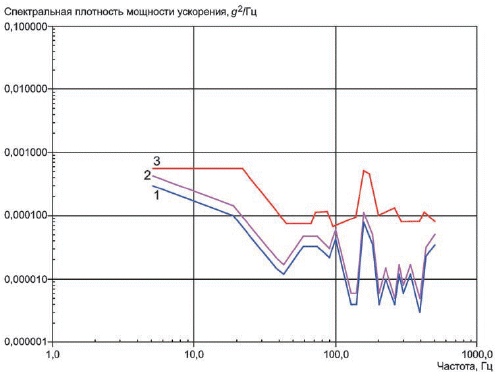
1 - хорошее дорожное покрытие, =0,10 g; 2 - плохое дорожное покрытие,
=0,13 g; 3 - очень плохое дорожное покрытие,
=0,27 g
Рисунок 52 - Тестовые воздействия в поперечном направлении по SRETS [три уровня жесткости испытаний по перемещению: высокий (=1,8 мм), средний (
=1,4 мм) и низкий (
=1,2 мм)] на основе спектра
Таблица 8 - Жесткость испытаний на удар, определенных по программе SRETS для дополнения испытаний на широкополосную случайную вибрацию
Горизонтальное направление (ось X) | Горизонтальное направление (ось Y) | Вертикальное направление (ось Z) | ||||||
Число ударов на 1000 км | Уско- | Длитель- | Число ударов на 1000 км | Уско- | Длитель- | Число ударов на 1000 км | Ускоре- | Длитель- |
1 | 2 | 5 | 1 | 2 | 10 | 12 | 2 | 5 |
12 | 2 | 20 | 2 | 2 | 15 | 7 | 2 | 10 |
25 | 2 | 25 | 7 | 2 | 20 | 3 | 2 | 15 |
29 | 2 | 30 | 13 | 2 | 25 | 17 | 2 | 20 |
21 | 2 | 35 | 10 | 2 | 30 | 6 | 2 | 25 |
3 | 2 | 40 | 2 | 2 | 35 | 4 | 2 | 30 |
1 | 2 | 40 | 2 | 2 | 35 | |||
1 | 2 | 40 | ||||||
2 | 4 | 5 | 1 | 4 | 5 | 16 | 4 | 5 |
2 | 4 | 10 | ||||||
2 | 4 | 20 | ||||||
1 | 4 | 25 | ||||||
1 | 6 | 5 | 1 | 6 | 5 | 3 | 6 | 5 |
1 | 6 | 10 | ||||||
1 | 6 | 20 | ||||||
1 | 5 | 5 | 8 | 5 | 1 | 8 | 5 | |
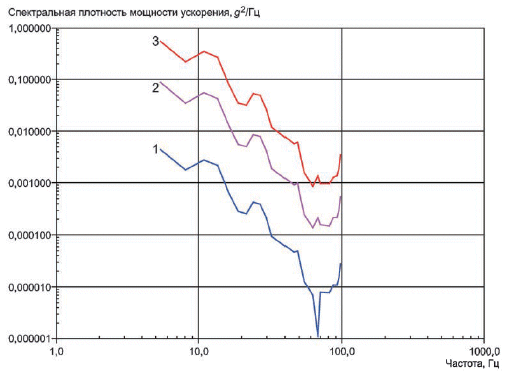
1 - =0,18 g для 7,96% времени перевозки; 2 -
=0,8 g для 0,35% времени перевозки; 3 -
=2,0 g для 0,23% времени перевозки
Рисунок 53 - Тестовые воздействия в вертикальном направлении по SRETS
[три уровня жесткости испытаний по перемещению: высокий (=40,5 мм), средний (
=16,2 мм) и низкий (
= 3,7 мм)] на основе спектра и среднеквадратичного значения
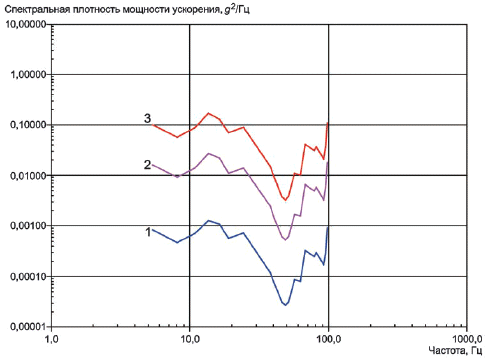
1 - =0,18 g для 2,69% времени перевозки; 2 -
=0,8 g для 0,14% времени перевозки; 3 -
=2,0 g для 0,20% времени перевозки
Рисунок 54 - Тестовые воздействия в поперечном направлении по SRETS
[три уровня жесткости испытаний по перемещению: высокий (=19,7 мм), средний (
=7,9 мм) и низкий (
=1,8 мм)] на основе спектра и среднеквадратичного значения
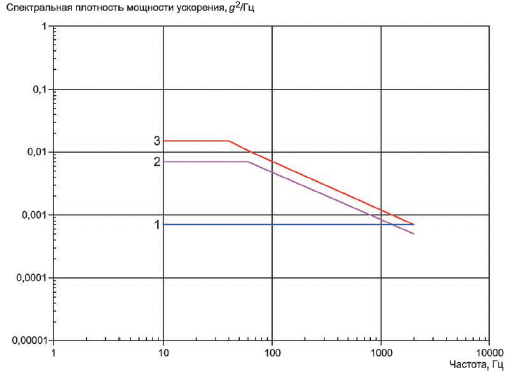
1 - поперечная вибрация (=1,18 g,
= 0,72 мм); 2 - продольная вибрация (
=1,64 g,
=2,3 мм); 3 - поперечная вибрация (
=2,02 g,
=3,33 мм)
Рисунок 55 - Тестовые воздействия по [17]
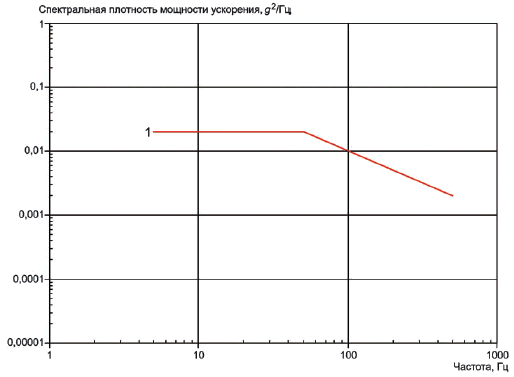
Рисунок 56 - Тестовые воздействия по [18] (в вертикальном направлении, =1,8 g,
=10,9 мм)
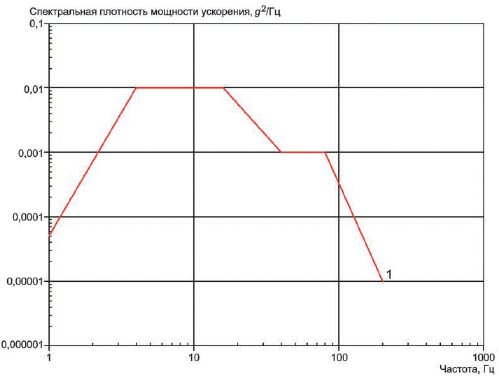
Рисунок 57 - Тестовые воздействия по [13] (в вертикальном направлении, =0,52 g,
=20,1 мм)
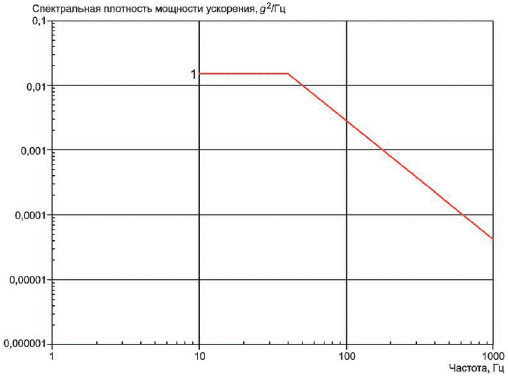
Рисунок 58 - Тестовые воздействия по [19] (в вертикальном направлении, =1,06 g,
=3,32 мм)
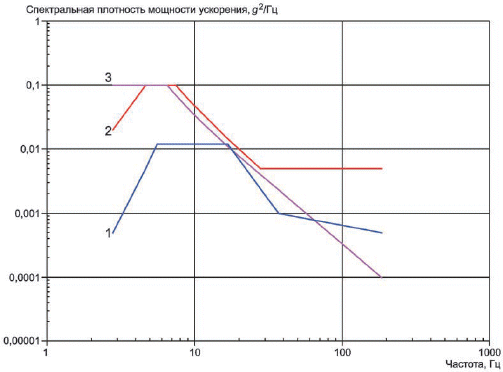
1 - рекомендации ИСО (=0,98 g,
=20,6 мм); 2 - старые рекомендации СЕН (
=1,4 g,
=51,4 мм); 3 - новые рекомендации СЕН (
=0,59 g,
=9,6 мм)
Рисунок 59 - Тестовые воздействия по стандартам СЕН и ИСО
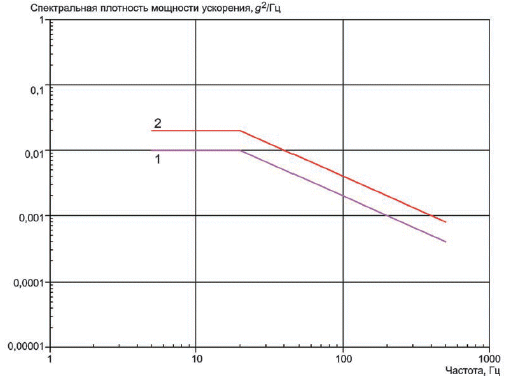
1 - бережное транспортирование Т2.1/Т2.2 (=0,86 g,
=7,7 мм); 2 - особые условия транспортирования Т2.3 (
=1,26 g,
=10,9 мм)
Рисунок 60 - Тестовые воздействия по [20]
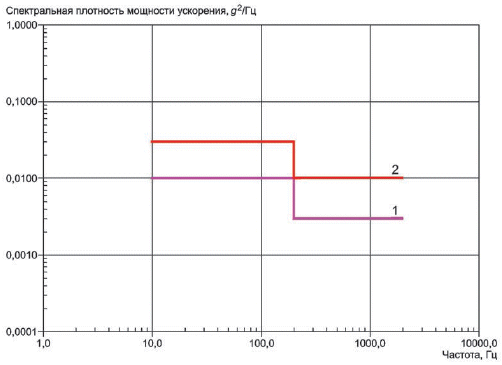
1 - классы 2М1/2М2 (=2,7 g,
=2,7 мм); 2 - класс 2МЗ (
=4,9 g,
=4,7 мм)
Рисунок 61 - Тестовые воздействия МЭК 60721-3-2:1997 (случайная вибрация)
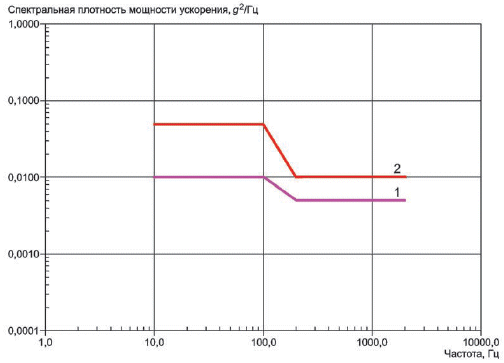
1 - классы 2М1/2М2 (=3,2 g,
=2,7 мм); 2 - класс 2МЗ (
=4,9 g,
=6,1 мм)
Рисунок 62 - Тестовые воздействия [25] (случайная вибрация)
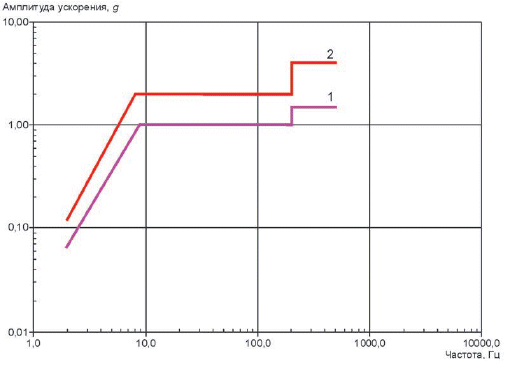
1 - классы 2М1/2М2; 2 - класс 2М3
Рисунок 63 - Тестовые воздействия МЭК 60721-3-2:1997 (гармоническая вибрация)
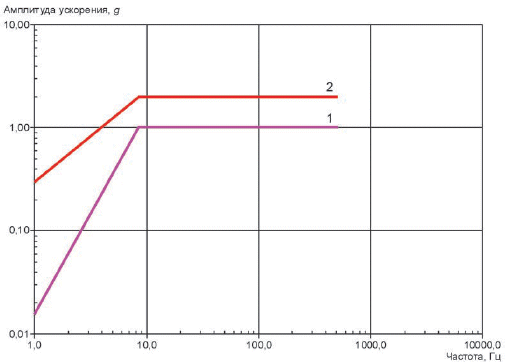
1 - классы 2М1/2М2; 2 - класс 2М3
Рисунок 64 - Тестовые воздействия [25] (гармоническая вибрация)
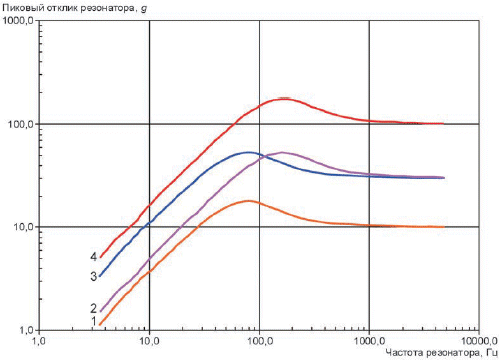
1 - классы 2М1/2М2; 2 - класс 2М2; 3 - класс 2М3; 4 - класс 2М3
Рисунок 65 - Тестовые воздействия МЭК 60721-3-2:1997 (ударные спектры)
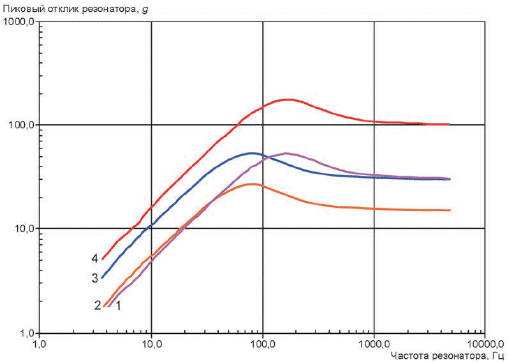
1 - класс 2М2; 2 - классы 2М1/2М2; 3 - класс 2М3; 4 - класс 2М3
Рисунок 66 - Тестовые воздействия [25] (ударные спектры)
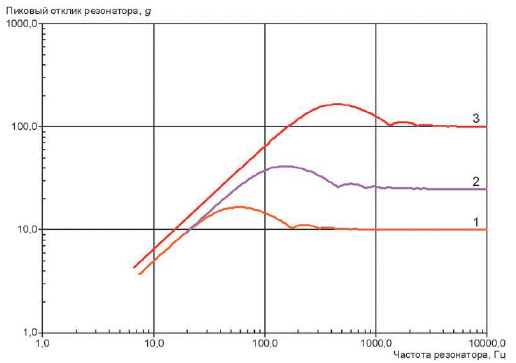
1 - длительность импульса 0,016 с (классы 2М1/2М2); 2 - длительность импульса 0,006 с (классы 2М2/2М3); 3 - длительность импульса 0,002 с (класс 2М3)
Рисунок 67 - Рекомендуемые тестовые воздействия [25] (ударные спектры для повторяющихся ударов, число ударов 1006=600)
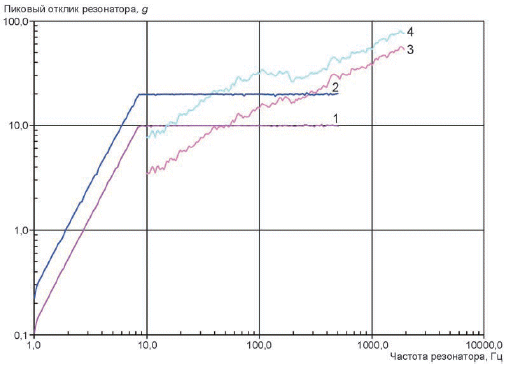
1 - гармоническая (классы 2М1/2М2); 2 - гармоническая (класс 2М3); 3 - случайная (классы 2М1/2М2); 4 - случайная (класс 2М3)
Рисунок 68 - Сравнение жесткостей случайной и гармонической вибрации по МЭК 60721-3-2:1997 (добротность резонатора Q=10)
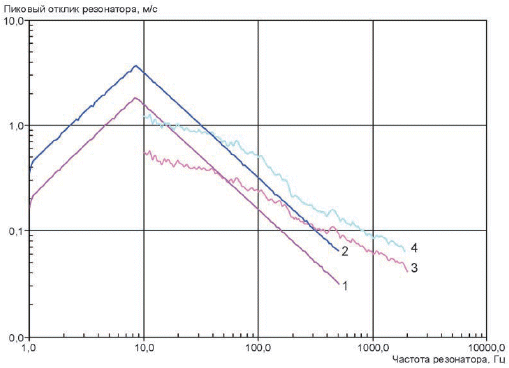
1 - гармоническая (классы 2М1/2М2); 2 - гармоническая (класс 2М3); 3 - случайная (классы 2М1/2М2); 4 - случайная (класс 2М3)
Рисунок 69 - Сравнение жесткостей случайной и гармонической вибрации по МЭК 60721-3-2:1997 (добротность резонатора Q=10)
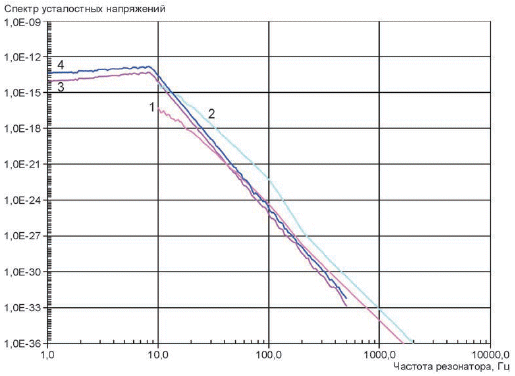
1 - случайная (классы 2М1/2М2); 2 - случайная (класс 2М3); 3 - гармоническая (классы 2М1/2М2); 4 - гармоническая (класс 2М3)
Рисунок 70 - Сравнение жесткостей случайной и гармонической вибрации по МЭК 60721-3-2:1997 (параметры резонаторов: Q=10, b=5, c=k=1)
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам
Таблица ДА.1
Обозначение ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего национального стандарта |
IEC 60721-3-2:1997 | - | * |
* Соответствующий национальный стандарт отсутствует. До его утверждения рекомендуется использовать перевод на русский язык данного международного стандарта. | ||
Библиография
[1] | Final Report; Source Reduction by European Testing Schedules (SRETS), Edited by Ulrich Braunmiller, European Commission, Community Research, BCR Information Project Report EUR 19090, 1999 (General Distribution Data) |
[2] | A Round Robin Exercise on Road Transportation Data, D.P. Richards & B.E. Hibbert, Journal of the IES, July/Aug 1993 (General Distribution Data) |
[3] | BL755 Transportation Vibration Trial, Cranfield University, COA-DA-1384, 1389, 1390 & 1393, October 1996 (Restricted Distribution Data) |
[4] | Shock and Vibration on Chassis of Various lorries, Semi-trailers and Trailers, W Hoppe & J Gerok, Der Versuchs-und Forschungsingenieur 94, 1974 (General Distribution Data) |
[5] | Vibration on the Platform of Various Utility Transport Vehicles and on Containers During Loading and Unloading in Port, W Hoppe & J Gerok, Journal of the Society of Environmental Engineers, Vol 15-4 Iss 71, Dec 1976 (General Distribution Data) |
[6] | Vibration Measurement Landrover 110 with TacGA Equipment, Report No MBK 980512, June 1998 (Restricted Distribution Data) |
[7] | Automotive Trials Report on a Transit Convoy Van, Report MBK 96488, May 1996 (Restricted Distribution Data) |
[8] | Automotive Trials Report on a Convoy Support Vehicle, Report MBK 96273, March 1996 (Restricted Distribution Data) |
[9] | GAM-EG-13 Annexe 6 Modeled et Donnees D'envronment Mechanique (General Distribution Data) |
[10] | Transportation Dynamic Environment Summary, J.T. Foley, Sandia Laboratories, January 1973 (General Distribution Data) |
[11] | The Origin of the Composite Wheeled Vehicle, Two-Wheeled trailer and Tracked Vehicles Vibration Schedules in Mil Std 810D/E (General Distribution Data) |
[12] | ASTM D 4728-91, Standard test method for random vibration testing of shipping containers (General Distribution Data) |
[13] | ASTM D 4728-95, Standard test method for random vibration testing of shipping containers (General Distribution Data) |
[14] | EXACT DK 1-237, 1983, Vibration environments - Background information for the preparation of a general test specification for electronic equipment, Electronic Centralen, Venlighedsvej 4, DK-2970 Hosholm (General Distribution Data) |
[15] | Comparison between lateral, longitudinal and vertical vibration levels in commercial truck shipments, S. Paul Singh, John R. Antle and Gary G. Burgess, Packaging technology and science, Vol. 5 71-75, 1992 (General Distribution Data) |
[16] | The Intermodal Shipping Environment, The association of American railroads, Report No DP3-92, 1991 (General Distribution Data) |
[17] | UK Defence Standard 00-35, Environmental handbook for defence materiel, UK Ministry of Defence (General Distribution Data) |
[18] | NATO AECTP 400, Allied Environmental Guidelines for Defence Materiel (General Distribution Data) |
[19] | ETA 1992, Company internal test specification, P. Merkle, Elecktrotechnische Apparante GmbH, 8503 Altdorf, Nurn-berg (General Distribution Data) |
[20] | ETS 300 019-2-2; 1992; European Telecommunication Standard; Equipment Engineering; Environmental conditions and environmental tests for telecommunication equipment. Part 2-2: Specification of environmental tests T 2.1 to T 2.3; Transportation (General Distribution Data) |
[21] | First Report; Source Reduction by European Testing Schedules (SRETS), Edited by Thomas Trost, European Commission, Community Research, BCR Information Project Report EUR 18267, 1998 (General Distribution Data) |
[22] | NATO STANAG 4370, Environmental Guidance for Defence Materiel |
[23] | IEC 60068 (all parts), Environmental testing |
[24] | IEC 60721 (all parts), Classification of environmental conditions |
[25] | IEC 60721-4-2:1997, Classification of environmental conditions - Part 4-2: Guidance for the correlation and transformation of environmental conditions classe of IEC 60721-3 to the environmental tests of IEC 60068 - Transportation |
[26] | IEC/TR 62131-1:2011 Environmental conditions - Vibration and shock of electrotechnical equipment - Part 1: Process for validation of dynamic data |
[27] | IEC 60068-2-55, Environmental testing - Part 2-55: Tests - Test Ее and guidance: Bounce |
УДК 534.1:006.354 | ОКС 19.040 | Т34 |
Ключевые слова: автомобильный транспорт, транспортная вибрация, условия перевозок, тестовые воздействия, спектральная плотность мощности ускорения, ударный спектр | ||
Электронный текст документа
и сверен по:
, 2016
{kind=link}