ГОСТ ISO 12117-2-2013
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Машины землеройные
ТРЕБОВАНИЯ К РАБОЧИМ ХАРАКТЕРИСТИКАМ И ЛАБОРАТОРНЫЕ ИСПЫТАНИЯ ЗАЩИТНЫХ КОНСТРУКЦИЙ ЭКСКАВАТОРОВ
ЧАСТЬ 2
Конструкции для защиты от опрокидывания (ROPS) экскаваторов грузоподъемностью свыше 6 т
Earth-moving machinery. Laboratory tests and performance requirements for protective structures of excavators. Part 2. Roll-over protective structures (ROPS) for excavators of over 6 t
МКС 53.100
Дата введения 2015-01-01
Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0-92 "Межгосударственная система стандартизации. Основные положения" и ГОСТ 1.2-2009 "Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, применения, обновления и отмены"
Сведения о стандарте
1 РАЗРАБОТАН Обществом с ограниченной ответственностью "Испытательный центр "Центральный научно-испытательный полигон строительных и дорожных машин" (ООО "ИЦ "ЦНИП СДМ") на основе собственного аутентичного перевода на русский язык международного стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 267 "Строительно-дорожные машины и оборудование"
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации по переписке (протокол N 63-П от 27 декабря 2013 г.)
За принятие проголосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по | Сокращенное наименование национального органа по стандартизации |
Армения | AM | Минэкономики Республики Армения |
Беларусь | BY | Госстандарт Республики Беларусь |
Киргизия | KG | Кыргызстандарт |
Россия | RU | Росстандарт |
Таджикистан | TJ | Таджикстандарт |
Узбекистан | UZ | Узстандарт |
4 Настоящий стандарт идентичен международному стандарту ISO 12117-2:2008* Earth-moving machinery - Laboratory tests and performance requirements for protective structures of excavators Part 2: Roll-over protective structures (ROPS) for excavators of over 6 t (Машины землеройные. Требования к рабочим характеристикам и лабораторные испытания защитных конструкций экскаваторов. Часть 2. Конструкции для защиты от опрокидывания (ROPS) экскаваторов грузоподъемностью свыше 6 т) с технической поправкой Cor/1:2010, выделенной в тексте полужирным курсивом в подпункте 6.2.1 и в таблице 3.
________________
* Доступ к международным и зарубежным документам, упомянутым здесь и далее по тексту, можно получить, перейдя по ссылке на сайт . - .
Международный стандарт разработан Техническим комитетом по стандартизации ISO/TC 127 "Машины землеройные" Международной организации по стандартизации (ISO) и утвержден Европейским комитетом по стандартизации CEN в качестве европейского стандарта без внесения изменений.
Перевод с английского языка (en).
Сведения о соответствии межгосударственных стандартов ссылочным международным стандартам приведены в дополнительном приложении ДА.
Степень соответствия - идентичная (IDT).
Разработанный стандарт может быть использован при ежегодной актуализации перечня стандартов, содержащих правила и методы исследований (испытаний), а также стандартов, в результате применения которых на добровольной основе обеспечивается соблюдение требований технического регламента Таможенного союза "О безопасности машин и оборудования"
5 Приказом Федерального агентства по техническому регулированию и метрологии от 19 марта 2014 г. N 174-ст межгосударственный стандарт ГОСТ ISO 12117-2-2013 введен в действие в качестве национального стандарта Российской Федерации с 01 января 2015 г.
6 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодном информационном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячном информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячном информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
Введение
Долгое время считалось, что гидравлические экскаваторы опрокинуть труднее, чем другие землеройные машины, так как при движении под уклон навесное оборудование больших размеров обеспечивает опору корпусу машины. Однако несчастные случаи, произошедшие в некоторых регионах мира, показали необходимость защиты при опрокидывании гидравлических экскаваторов. Это объясняет необходимость разработки настоящего стандарта.
Настоящий стандарт устанавливает метод испытаний защитных устройств при опрокидывании (ROPS) для гидравлических экскаваторов грузоподъемностью свыше 6 т, используемых при земляных работах. В отличие от машин, определенных ISO 3471, гидравлические экскаваторы имеют конструктивную особенность - навесное оборудование больших размеров, что влияет на требования к конструкции ROPS. Таким образом, метод испытания и критерии, необходимые для гидравлических экскаваторов, отличаются от применимых к другим землеройным машинам.
Настоящий стандарт применим также к гидравлическим экскаваторам, используемым в лесном хозяйстве. Поэтому критерии ROPS для гидравлических экскаваторов с подъемной кабиной, используемых в лесном хозяйстве, включены в стандарт как дополнительная информация.
1 Область применения
1 Область применения
Настоящий стандарт устанавливает последовательные и воспроизводимые методы оценки силовых характеристик защитных устройств экскаваторов (ROPS) под статической нагрузкой, а также требования к типовому образцу под такой нагрузкой. Эти методы применяются к ROPS гидравлических экскаваторов, определенных ISO 6165, с массой от 6 до 50 т.
ROPS должно гарантированно обеспечивать пристегнутому ремнем безопасности оператору минимальное защитное пространство при перевороте машины на 360° относительно продольной оси без потери контакта с твердой поверхностью на уклоне до 30°. ROPS должно устанавливаться, если существует риск опрокидывания.
Настоящий стандарт также определяет требования к ROPS для машин, смонтированных на экскаваторах, или для экскаваторов, используемых при погрузочно-разгрузочных работах и оснащенных приспособлениями для сноса зданий, магнитами, грейферами или различными грузозахватными устройствами.
Настоящий стандарт не распространяется на гидравлические экскаваторы с подъемным механизмом кабины.
Примечание - Настоящий стандарт применяется для экскаваторов с эксплуатационной массой до 50000 кг в связи с ограничением экспериментальных и статистических данных, используемых для критериев приемки. Это не исключает возможности применения процедуры, описанной в этой части ISO 12117, для экскаваторов большей или меньшей массы. Исключение - экскаваторы, специально разработанные для горных условий, где выполнение этих требований может привести к созданию непрактичной конструкции.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты*; для недатированных ссылок применяют последнее издание ссылочного документа:
_______________
* Таблицу соответствия национальных стандартов международным см. по ссылке. - .
ISO 3164 Earth-moving machinery - Laboratory evaluations of protective structures - Specifications for deflection-limiting volume (Машины землеройные. Защитные устройства. Характеристика объема ограничения деформации при лабораторных испытаниях)
ISO 5353 Earth-moving machinery, and tractors and machinery for agriculture and forestry - Seat index point (Машины землеройные, тракторы и машины для сельского и лесного хозяйства. Контрольная точка сиденья)
ISO 6165 Earth-moving machinery - Basic types - Vocabulary (Машины землеройные. Классификация. Термины и определения)
ISO 9248 Earth-moving machinery; units for dimensions, performance and capacities, and their measurement accuracies (Машины землеройные. Единицы измерения размеров, эксплуатационных показателей производительности и допуски на измерения)
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя "Национальные стандарты" за текущий год. Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться заменяющим (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте используются следующие термины с соответствующими определениями:
3.1 навесное оборудование (attachment): Узлы, состоящие из различных компонентов, которые могут устанавливаться на базовую машину или оборудование, и предназначенные для специальных целей.
3.2 опорная плита (bedplate): Основной несущий элемент, к которому крепится рама машины для проведения испытаний.
3.3 граничная плоскость (ВР) (boundary plane): Плоскость, определяющая вертикальную проекцию спины, боков и колен оператора на DVL.
Примечание - Граничные плоскости используются при определении точки приложения нагрузки.
3.4 граничная имитируемая плоскость грунта (BSGP) (boundary simulated ground plate): Плоскость, заданная (задаваемая) жесткими конструктивными точками машины, которая может обеспечить дополнительную защиту оператора в момент столкновения с землей при перевороте машины.
Примечание - Для определения жестких конструктивных точек см. 6.1.5.
3.5 подъемный механизм кабины (cab riser): Любой дистанционный механизм, увеличивающий высоту контрольной точки сиденья (SIP), определенную в ISO 5353, более чем на 250 мм относительно нормального положения.
3.6 объем ограничения деформации (DVL) (deflection-limiting volume): Ортогональное приближение к объему, занимаемому мужчиной-оператором высокого роста, в положении сидя, в обычной одежде и предохранительном шлеме.
Примечание - Адаптировано к ISO 3164:1996, п.3.1.
3.7 деформация ROPS (deflection of ROPS): Перемещение ROPS, монтажной системы и секции рамы, измеренное в точке приложения нагрузки и, исключающее любое перемещение средств измерения.
3.8 основное оборудование (equipment): Совокупность компонентов, монтируемых на базовую машину и позволяющих выполнять основные функции, для которых она предназначена.
3.9 базовая плоскость грунта (GRP) (ground reference plane): Установленная заранее плоскость, представляющая собой твердую плоскую опорную поверхность для машины.
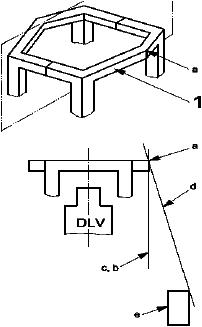
3.10 боковая граничная имитируемая плоскость грунта (LBSGP) (lateral boundary simulated ground plane): Плоскость, определяемая с левой стороны машины тремя жесткими частями конструкции (например, верхней частью стрелы, опорной рамой кабины в передней части с левой стороны и верхней частью противовеса также с левой стороны), когда машина опирается на боковую сторону, с основным и навесным оборудованием, находящимся в положении, когда стрела находится на минимальной высоте, что определено производителем и максимальным радиусом действия в позиции GRP (рисунок 1).
Примечание - Плоскость LBSGP образуется тремя жесткими частями, находящимися с левой стороны машины, например ребром противовеса, наивысшими точками стрелы при положении основного и навесного оборудования в позициях максимального радиуса действия над поверхностью грунта и передней частью рамы.
Рисунок 1 - Боковая граничная имитируемая плоскость грунта (LBSGP)

в - минимальная высота стрелы
![]() - минимальная высота стрелы;
- минимальная высота стрелы; ![]() - максимальный радиус действия;
- максимальный радиус действия; ![]() - базовая плоскость грунта.
- базовая плоскость грунта.
Рисунок 1 - Боковая граничная имитируемая плоскость грунта (LBSGP)
3.11 боковая имитируемая плоскость грунта (LSGP) (lateral simulated ground plane): Плоскость, образуемая лежащей на боку машиной (рисунок 2).
Примечание 1 - Эта плоскость образуется при повороте вертикальной плоскости, параллельной продольной осевой линии машины, и создает новую плоскость, проходящую через крайнюю точку верхнего конструктированного элемента ROPS, к которому приложена боковая нагрузка, и вторую нижнюю точку машины.
Примечание 2 - Каждая из двух точек, показанных на рисунке 2, может выдержать половину массы машины.
Примечание 3 - LSGP образована при ненагруженном ROPS и перемещается с его, элементами при приложении нагрузки, сохраняя заранее установленный угол к вертикали.
Примечание 4 - LSGP применима к условиям, когда машина опрокинулась на две твердые точки. Если принимать во внимание третью твердую точку, то LSGP также может быть применена.
Рисунок 2 - Боковая имитируемая плоскость грунта (LSGP)
1 - верхний элемент рамы ROPS, к которому приложена боковая нагрузка; ![]() - крайняя точка проекции элемента рамы;
- крайняя точка проекции элемента рамы; ![]() - вертикальная линия, проходящая через крайнюю точку проекции элемента рамы;
- вертикальная линия, проходящая через крайнюю точку проекции элемента рамы; ![]() - вертикальная плоскость, параллельная продольной осевой линии машины и проходящая через линию
- вертикальная плоскость, параллельная продольной осевой линии машины и проходящая через линию ![]() ;
; ![]() - LSGP;
- LSGP; ![]() - жесткий элемент машины, образующий LSGP
- жесткий элемент машины, образующий LSGP
Рисунок 2 - Боковая имитируемая плоскость грунта (LSGP)
3.12 точка приложения нагрузки (LAP) (load application point): Точка на конструкции ROPS, к которой прикладывается сила ![]() испытательной нагрузки.
испытательной нагрузки.
3.13 устройство для распределения нагрузки (LDD) (load distribution device): Устройство, используемое для предотвращения местного проникновения элементов ROPS в точке приложения нагрузки.
3.14 одно- или двухстоечное ROPS (one- or two-post ROPS): Одно- или двухстоечное ROPS, образованное или изготовленное из воспринимающих нагрузку консольных конструктивных элементов.
3.15 рабочая масса (operating mass): Масса базовой машины с рабочим и навесным оборудованием без груза в стандартной комплектации, определенной производителем, с учетом массы оператора (75 кг), полностью заправленных топливных баков и всех рабочих жидкостей (гидравлического, трансмиссионного, моторного масел и охлаждающей жидкости) до уровней, определенных производителем, и, если предусмотрено, с наполовину заправленным бачком стеклоомывателя. |
Примечание 3 - Почва, грязь, камни, ветки, мусор и др., которые обычно остаются на машине при работе, не рассматриваются как часть массы машины. Выкапываемый, перемещаемый или разгружаемый любым способом материал не рассматривается как часть массы машины при определении требований к испытаниям.
3.16 защитные ограждения оператора (OPG) (operator protective guards): Система, состоящая из верхнего и переднего защитных ограждений, обеспечивающих защиту рабочего места оператора на экскаваторе.
Примечание 1 - Адаптировано к ISO 10262:1998, п.3.1.
3.17 образец для испытаний (representative specimen): ROPS, монтажная арматура и рама машины (полностью или частично), используемые для испытаний, в пределах конструктивных отклонений, указанных в технической документации изготовителя.
Примечание 1 - ROPS, изготовленные по этой технической документации, должны выдерживать заданные уровни эксплуатационных характеристик.
3.18 каркас ROPS (rollbar ROPS): Одно- или двухстоечный ROPS без FOPS или любой воспринимающий нагрузку консольный конструктивный элемент. |
3.19 устройство для защиты при опрокидывании (ROPS) (roll-over protective structure): Система, состоящая главным образом из металлических структурных элементов, назначение которой - защита в разумных пределах рабочего места оператора, оснащенного удерживающей системой, в случае опрокидывания (переворота) машины.
Примечание - Структурные элементы включают любые подрамники, кронштейны, опоры, подпятники, болты, пальцы, эластичные амортизаторы, используемые для крепления системы к поворотной раме, за исключением монтажной арматуры, являющейся неотъемлемой частью рамы.
3.20 конструктивный элемент ROPS (ROPS structural member): Элемент, предназначенный для восприятия приложенной силы или поглощения энергии.
ПРИМЕР - Подрамник, кронштейн, опора, соединительная муфта, болт, шплинт, подвеска, эластичный амортизатор.
3.21 система ремней безопасности (seat belt system): Ремни безопасности и места их крепления.
Примечание - Адаптировано к ISO 6683:2005, п.3.3.
3.22 соединительная муфта (S) (socket): Элемент, воспринимающий сосредоточенную нагрузку устройства для распределения нагрузки (LDD).
Примечание - Адаптировано к ISO 6683:2005, п.3.3.
3.23 точка жесткости (stiff point): Точка или жесткий элемент конструкции, имеющий достаточную прочность, чтобы выдерживать нагрузки, возникающие при опрокидывании и прогнозируемой деформации.
Примечание - Точки жесткости устанавливаются (определяются) в следующем порядке:
а) нагрузка, перпендикулярная к BSGP и приложенная в каждой точке, эквивалентна массе стандартной машины;
b) деформация измеряется в каждой жесткой точке, образованной на измененной BSGP (деформация измеряется в каждой точке проникновения элементов в грунт плюс деформация самих элементов - эта процедура может быть рассчитана);
c) все физические тесты должны выполняться при BSGP, установленной в вышеописанном порядке.
3.24 поворотная платформа (revolving frame): Элементы конструкции машины, к которым крепится ROPS во время нормальной работы.
Примечание - Для целей настоящего стандарта все прикрепляемые к конструкции съемные компоненты допускается снимать с рамы машины. Эта рама представляет собой репликацию корпуса машины, так как прикрепляется к верхней части посредством поворотной опоры.
3.25 вертикальная граничная имитируемая плоскость грунта (VBSGP) (vertical boundary simulated ground plane): Плоскость, образованная верхними элементами ROPS перевернувшейся машины.
Примечание 1 - Плоскость образуется жесткими верхними элементами машины (например, верхними частями стрелы и противовеса), когда машина перевернулась, с основным и навесным оборудованием при минимальной высоте стрелы, как определено изготовителем, и максимальным вылетом на базовую плоскость грунта (GRP).
Примечание 2 - VBSGP образуется тремя наиболее выступающими жесткими точками, например, наивысшей точкой на стреле в позиции максимального вылета и точками, образуемыми задней частью противовеса.
4 Условные обозначения
В настоящем стандарте применены следующие условные обозначения:![]() - максимальная энергия, поглощаемая конструкцией, зависящая от рекомендуемой изготовителем и выраженная в джоулях;
- максимальная энергия, поглощаемая конструкцией, зависящая от рекомендуемой изготовителем и выраженная в джоулях;![]() - нагрузка, выраженная в ньютонах;
- нагрузка, выраженная в ньютонах;![]() - максимальная эксплуатационная масса машины, выраженная в килограммах, в соответствии со спецификацией изготовителя, включая навесное оборудование и инструмент в зависимости от условий работы, а также ROPS;
- максимальная эксплуатационная масса машины, выраженная в килограммах, в соответствии со спецификацией изготовителя, включая навесное оборудование и инструмент в зависимости от условий работы, а также ROPS;![]() - длина ROPS, выраженная в миллиметрах и определяемая следующим образом:
- длина ROPS, выраженная в миллиметрах и определяемая следующим образом:
а) для одно- или двухстоечного ROPS ![]() определяется по верху ROPS от наружной поверхности стоек ROPS до наиболее удаленного конца консольного элемента, воспринимающего нагрузку (рисунок 3);
определяется по верху ROPS от наружной поверхности стоек ROPS до наиболее удаленного конца консольного элемента, воспринимающего нагрузку (рисунок 3);
Рисунок 3 - Боковая точка приложения нагрузки к двухстоечному ROPS
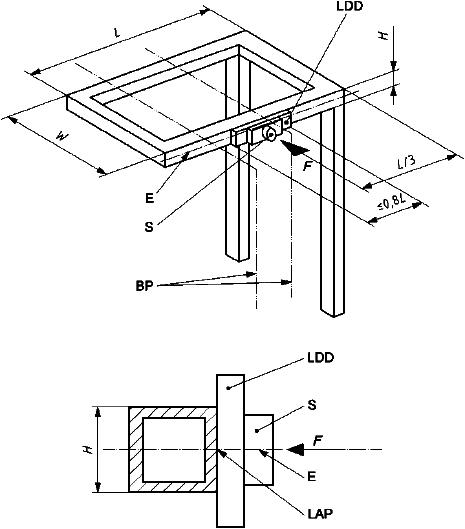
![]() - осевая линия верхнего конструктивного элемента ROPS;
- осевая линия верхнего конструктивного элемента ROPS; ![]() - нагрузка;
- нагрузка; ![]() - высота профиля верхнего конструктивного элемента;
- высота профиля верхнего конструктивного элемента; ![]() - длина ROPS;
- длина ROPS; ![]() - ширина ROPS;
- ширина ROPS; ![]() - устройство для распределения нагрузки (может выходить за пределы
- устройство для распределения нагрузки (может выходить за пределы ![]() );
); ![]() - точка приложения нагрузки;
- точка приложения нагрузки; ![]() - граничная плоскость;
- граничная плоскость;![]() - соединительная муфта
- соединительная муфта
Рисунок 3 - Боковая точка приложения нагрузки к двухстоечному ROPS
b) для многостоечного ROPS прямоугольной формы ![]() - это наибольшее общее продольное расстояние между внешними передними и задними стойками (рисунок 4);
- это наибольшее общее продольное расстояние между внешними передними и задними стойками (рисунок 4);
Примечание - Элементы конструкции ROPS необязательно должны полностью закрывать вертикальную проекцию DVL.
Рисунок 4 - Боковая точка приложения нагрузки к четырехстоечному ROPS

![]() - граничная плоскость DVL;
- граничная плоскость DVL; ![]() - осевая линия верхнего конструктивного элемента ROPS;
- осевая линия верхнего конструктивного элемента ROPS; ![]() - нагрузка;
- нагрузка; ![]() - длина или ширина ROPS;
- длина или ширина ROPS; ![]() - устройство для распределения нагрузки;
- устройство для распределения нагрузки; ![]() - соединительная муфта
- соединительная муфта
Примечание - На рисунке 3 подробно приведены примеры LAP и LDD. Две соединительных муфты, показанные на этом рисунке, иллюстрируют, что можно использовать более одной соединительной муфты в зависимости от требуемого усилия. Равные усилия должны быть приложены так, чтобы не ограничивать поворот ROPS при приложении нагрузки.
Рисунок 4 - Боковая точка приложения нагрузки к четырехстоечному ROPS
c) для ROPS с искривленными элементами конструкции ![]() определяется пересечением плоскости в точке касания к средней точке искривленного сегмента переднего или заднего элемента (рисунки 5 и 6);
определяется пересечением плоскости в точке касания к средней точке искривленного сегмента переднего или заднего элемента (рисунки 5 и 6);
d) для ROPS из трубчатого каркаса ![]() не определяется;
не определяется;
e) для ROPS с профилированными элементами конструкции ![]() определяется, как показано на рисунке 5, с:
определяется, как показано на рисунке 5, с:
- ![]() определяется как трехкратная высота (ширина по вертикали) верхнего элемента;
определяется как трехкратная высота (ширина по вертикали) верхнего элемента;
- ![]() определяется горизонтальной плоскостью, опущенной от наивысшей точки верхнего элемента;
определяется горизонтальной плоскостью, опущенной от наивысшей точки верхнего элемента;
- определяется пределами ![]() в пересечении передних или задних элементов;
в пересечении передних или задних элементов;
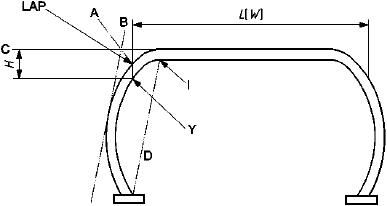
а - пример искривленных элементов конструкции (искривленные стойки), показывающий определение размеров ![]() ,
, ![]() и
и ![]()

б* - пример искривленных элементов конструкции (искривленные стойки), показывающий приложение нагрузки
____________________
* Обозначение соответствует оригиналу. - .
Рисунок 5 - Примеры искривленных или профилированных элементов конструкции

с - пример профилированных элементов конструкции, показывающий определение размеров ![]() ,
, ![]() или
или ![]()

d - пример профилированных элементов конструкции, показывающий приложение нагрузки
![]() - биссектриса угла, образованного двумя касательными линиями (
- биссектриса угла, образованного двумя касательными линиями (![]() и
и ![]() );
); ![]() - касательная линия параллельная
- касательная линия параллельная ![]() на наружной поверхности искривленного элемента конструкции ROPS;
на наружной поверхности искривленного элемента конструкции ROPS; ![]() - касательная к поверхности верхнего конструктивного элемента ROPS;
- касательная к поверхности верхнего конструктивного элемента ROPS; ![]() - прямая линия, пересекающая концы искривленных конструктивных элементов ROPS с сопряженными элементами;
- прямая линия, пересекающая концы искривленных конструктивных элементов ROPS с сопряженными элементами; ![]() - нагрузка;
- нагрузка; ![]() - точка пересечения искривленной поверхности с плоской поверхностью;
- точка пересечения искривленной поверхности с плоской поверхностью; ![]() - высота зоны приложения нагрузки;
- высота зоны приложения нагрузки; ![]() - устройство для распределения нагрузки;
- устройство для распределения нагрузки; ![]() - длина (ширина) ROPS для фиксирования LAP;
- длина (ширина) ROPS для фиксирования LAP; ![]() - соединительная муфта;
- соединительная муфта; ![]() - точка пересечения вертикальной линии LAP с внутренней поверхностью вертикального элемента
- точка пересечения вертикальной линии LAP с внутренней поверхностью вертикального элемента
Примечание 1 - Угол между ![]() и
и ![]() равен углу между
равен углу между ![]() и
и ![]() .
.
Примечание 2 - Примеры LAP и LDD (см. рисунок 3).
Рисунок 5 - Примеры искривленных или профилированных элементов конструкции
Рисунок 6 - Пример искривленного конструктивного элемента ROPS (вид сверху)

![]() - биссектриса угла, образованного двумя касательными линиями (
- биссектриса угла, образованного двумя касательными линиями (![]() и
и ![]() );
); ![]() - касательная к боковой поверхности верхнего конструктивного элемента ROPS (левого и правого);
- касательная к боковой поверхности верхнего конструктивного элемента ROPS (левого и правого); ![]() - касательная линия к средней точке сегмента дуги элемента ROPS;
- касательная линия к средней точке сегмента дуги элемента ROPS; ![]() - длина ROPS для определения точки нагружения
- длина ROPS для определения точки нагружения
Рисунок 6 - Пример искривленного конструктивного элемента ROPS (вид сверху)
![]() - ширина ROPS в миллиметрах, как изложено ниже:
- ширина ROPS в миллиметрах, как изложено ниже:
a) для трубчатого каркаса ROPS величина ![]() - это наиболее удаленные точки элементов конструкции;
- это наиболее удаленные точки элементов конструкции;
b) для одно- или двухстоечного ROPS параметр ![]() - это часть консольного силового элемента (как показано на рисунках 1, 4, 5), закрывающего по крайней мере вертикальную проекцию ширины DVL, измеряемую по верху ROPS, от внешних поверхностей консольных силовых элементов;
- это часть консольного силового элемента (как показано на рисунках 1, 4, 5), закрывающего по крайней мере вертикальную проекцию ширины DVL, измеряемую по верху ROPS, от внешних поверхностей консольных силовых элементов;
c) для всех других типов ROPS параметр ![]() - это наибольшее расстояние между внешними левой и правой стойками ROPS, измеренное по верху ROPS от внешних поверхностей консольных силовых элементов;
- это наибольшее расстояние между внешними левой и правой стойками ROPS, измеренное по верху ROPS от внешних поверхностей консольных силовых элементов;
d) для ROPS с профилированными элементами конструкции параметр ![]() - это вертикальная проекция
- это вертикальная проекция ![]() наружных поверхностей элементов конструкции (рисунок 5, а);
наружных поверхностей элементов конструкции (рисунок 5, а);
e) для ROPS с искривленными элементами конструкции параметр ![]() определяется пересечением плоскости
определяется пересечением плоскости ![]() с наружной поверхностью вертикального элемента, когда плоскость
с наружной поверхностью вертикального элемента, когда плоскость ![]() является биссектрисой угла, образуемого пересечением плоскостей
является биссектрисой угла, образуемого пересечением плоскостей ![]() и
и ![]() , плоскость
, плоскость ![]() является касательной к внешней поверхности, параллельной плоскости
является касательной к внешней поверхности, параллельной плоскости ![]() , плоскость
, плоскость ![]() пересекает искривленные элементы ROPS с прилегающими (смежными) элементами, плоскость
пересекает искривленные элементы ROPS с прилегающими (смежными) элементами, плоскость ![]() - это проекция на верхнюю плоскость верхних элементов конструкции ROPS;
- это проекция на верхнюю плоскость верхних элементов конструкции ROPS;![]() - деформация (смещение) ROPS, выраженное в миллиметрах;
- деформация (смещение) ROPS, выраженное в миллиметрах;![]() - высота зоны приложения нагрузки:
- высота зоны приложения нагрузки:
a) для прямых элементов ![]() - это расстояние от верха до низа элемента, как показано на рисунке 3;
- это расстояние от верха до низа элемента, как показано на рисунке 3;
b) для искривленных элементов ![]() - это вертикальный размер от верха элемента до низа в вертикальной плоскости, когда
- это вертикальный размер от верха элемента до низа в вертикальной плоскости, когда ![]() пересекает внутреннюю поверхность искривленного элемента конструкции в точке
пересекает внутреннюю поверхность искривленного элемента конструкции в точке ![]() , как показано на рисунке 5, а;
, как показано на рисунке 5, а;
c) для профилированных элементов ![]() определяется как трехкратная высота профиля, как показано на рисунке 5, с;
определяется как трехкратная высота профиля, как показано на рисунке 5, с;
d) для ROPS, состоящих из отдельных конструкций, ![]() - это расстояние от нижней точки нижнего элемента конструкции внутри относительно
- это расстояние от нижней точки нижнего элемента конструкции внутри относительно ![]() или
или ![]() до верхней точки верхнего элемента конструкции (рисунок 7); каждая конструкция должна удовлетворять требования к материалам, приведенным в п.7.
до верхней точки верхнего элемента конструкции (рисунок 7); каждая конструкция должна удовлетворять требования к материалам, приведенным в п.7.
Рисунок 7 - Высота зоны приложения нагрузки для ROPS с раздельными верхними конструктивными элементами
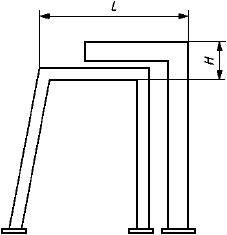
Примечание - ![]() является полной высотой верхних конструктивных элементов ROPS и базой для определения высоты LDD
является полной высотой верхних конструктивных элементов ROPS и базой для определения высоты LDD
Рисунок 7 - Высота зоны приложения нагрузки для ROPS с раздельными верхними конструктивными элементами
5 Оборудование и методы испытаний
5.1 Основные положения
Существуют требования к силе сопротивления в боковом и вертикальном направлениях и поглощению энергии в продольном и поперечном направлениях. Также существуют ограничения на деформацию ROPS под воздействием поперечной, продольной и вертикальной нагрузок. Эти требования к усилиям и энергии, а также к ограничению деформации под воздействием нагрузок предназначены для того, чтобы ROPS существенно не деформировалось в момент удара при опрокидывании.
Процедура оценки не обязательно должна дублировать структурные деформации, которые возникают при реальном опрокидывании. Однако конкретные требования при исследовании ROPS должны обеспечивать возложенные на него функции при различных вариантах фактического опрокидывания, а также аналитические предположения, основанные на совместимости ROPS с оборудованием, приспособлениями и рамой машины, на которой оно смонтировано. Таким образом, минимальная защита от раздавливания пристегнутого оператора обеспечивается при выполнении по крайней мере следующих условий:
- переворот на 360° вокруг продольной оси поворотной рамы машины без потери контакта с уклоном;
- основное и дополнительное оборудование соответствует предписаниям изготовителя, испытательная позиция - п.5.4.4;
- твердая глинистая поверхность с максимальным уклоном 30°.
5.2 Контрольно-измерительная аппаратура
Системы, используемые для измерения массы, усилия и деформации, должны соответствовать ISO 9248. Отклонения при измерении усилия и деформации должны находиться в пределах ±5% от максимальных значений.
5.3 Объект испытаний
Должна обеспечиваться надежная фиксация ROPS/поворотной платформы в сборе с основным и навесным оборудованием в положении максимального вылета к опорной плите с учетом прикладываемых боковых (поперечных), продольных и вертикальных нагрузок, определенных по формулам, приведенным в таблицах 2 и 3.
5.4. ROPS в сборе с поворотной платформой и крепление к опорной плите
5.4.1 ROPS должно крепиться к поворотной платформе как на рабочей машине (рисунок 8). Для проведения оценки не требуется полнокомплектная поворотная платформа. Однако поворотная платформа и смонтированный испытательный образец ROPS должны представлять собой конфигурацию, устанавливаемую на типовые машины. Все съемные окна, панели, двери и другие неструктурные элементы должны быть демонтированы, чтобы они не оказывали влияния на результаты оценки ROPS. Элементы, не входящие в ROPS (система подвески, подшипники), конструктивные свойства которых имеют значение для конструкции ROPS, также могут быть включены или смоделированы.
Рисунок 8 - Крепление поворотной платформы
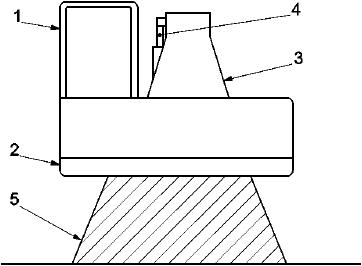
1 - ROPS;
2 - поворотная платформа; 3 - стрела; 4 - гидроцилиндр стрелы; 5 - опорная плита
Рисунок 8 - Крепление поворотной платформы
5.4.2 ROPS в сборе с поворотной платформой должно быть закреплено на опорной плите таким образом, чтобы элементы крепления подвергались минимальной деформации во время испытаний. Поворотная платформа в сборе с ROPS не должна иметь дополнительного контакта с опорной плитой, за исключением первоначального крепежа.
5.4.3 При испытаниях должны быть заблокированы любые элементы подвески, чтобы они не могли способствовать поведению испытываемого образца, ведущего к нагрузочной деформации. Элементы подвески, используемые для крепления ROPS к раме машины и воспринимающие нагрузку, должны быть установлены и выполнять свою функцию в момент начала испытаний.
5.4.4 Основное и дополнительное оборудование, включая такие силовые элементы, как гидроцилиндры стрелы или рукояти, должны находиться в позиции GRP (рисунок 1) при минимальной высоте стрелы и максимальном вылете, как это определено производителем.
Основное и навесное оборудование или другие устройства (такие как гидроцилиндры стрелы или рукояти), которые могут повлиять на деформацию ROPS под нагрузкой, должны быть включены или смоделированы при испытаниях для определения их влияния на деформацию конструкции ROPS.
Основное и навесное оборудование может иметь реальные или эквивалентные размер, жесткость и месторасположение.
6 Проведение испытаний под нагрузкой
6.1 Основные положения
6.1.1 Испытания под нагрузкой должны проводиться в следующей последовательности: сначала боковое, затем продольное, затем вертикальное нагружение. Все испытания проводятся на одном представительном образце (таблицы 2 и 3, в которых приведены формулы для определения требуемых энергии и усилия). Если нагрузка по какой-либо причине должна быть снята, а затем снова приложена, то только дополнительная энергия, суммированная после достижения максимальной деформации в результате первого приложения нагрузки, может быть добавлена к сумме.
6.1.2 Перед приложением нагрузки на конструкции должны быть определены и промаркированы все точки и плоскости приложения нагрузки, а также осевая линия.
6.1.3 Правка и ремонт между фазами нагружения не допускаются.
6.1.4 Для предотвращения локального проникновения может использоваться устройство для распределения нагрузки. Оно не должно препятствовать повороту ROPS.
6.1.5 Нагружение, как определено в п.6.2 и/или п.6.4, может быть прекращено по достижении LBSGP и/или VBSGP до уровней энергии или усилия, приведенных в таблицах 2 и 3. Для выполнения этого условия во время проведения испытаний должны быть установлены все жесткие части машины.
Деформация жестких частей должна быть проверена следующим образом:
a) приложением нагрузки, равной массе стандартной машины, перпендикулярно к LBSGP и/или VBSGP в каждой точке (с учетом деформации точек жесткости, а также проникновения брусьев/стоек ROPS в землю);
b) измерением деформации каждой точки жесткости для определения измененных LBSGP и/или VBSGP;
c) проведением испытаний с использованием LBSGP и/или VBSGP, определенных, как указано выше.
Примечание - Производитель может выбрать LBSGP и/или VBSGP в соответствии с п.6.2 и/или 6.4.
6.1.6 Все элементы конструкции, которые являются частью объекта испытаний, сконструированные как детали, сопротивляющиеся прикладываемой нагрузке и/или поглощающие энергию, должны удовлетворять требования к материалам, указанным в п.7.
6.2 Боковое нагружение ROPS
6.2.1 Боковая нагрузка прикладывается к верхним конструктивным элементам ROPS.
Высота устройства для распределения нагрузки должна быть меньше или равна полной высоте наиболее высоких конструктивных элементов ROPS (см. ![]() в п.7).
в п.7).
LDD не должно контактировать с конструктивными элементами ROPS за пределами ![]() .
.
6.2.2 Точка приложения нагрузки должна определяться в зависимости от длины ![]() и вертикальных проекций передней и задней плоскостей DVL. Точка приложения нагрузки не должна находиться внутри третьей части длины (
и вертикальных проекций передней и задней плоскостей DVL. Точка приложения нагрузки не должна находиться внутри третьей части длины (![]() ) конструкции одно- или двухстоечного ROPS. Если точка
) конструкции одно- или двухстоечного ROPS. Если точка ![]() находится между вертикальной проекцией DVL и конструкцией одно- или двустоечного ROPS, то точка приложения нагрузки должна быть перемещена от этой конструкции до вертикальной проекции DVL (рисунок 3).
находится между вертикальной проекцией DVL и конструкцией одно- или двустоечного ROPS, то точка приложения нагрузки должна быть перемещена от этой конструкции до вертикальной проекции DVL (рисунок 3).
Нагрузка должна прикладываться со стороны ROPS, где расстояние от осевой линии DVL до осевой линии машины наибольшее.
6.2.3 Для ROPS, имеющих более двух стоек, точка распределения нагрузки должна располагаться между вертикальными проекциями передних и задних граничных плоскостей DVL (рисунок 4).
6.2.4 Если место оператора не располагается на осевой линии поворотной платформы, то боковая нагрузка должна быть приложена со стороны, наиболее близкой к месту оператора.
6.2.5 Боковая нагрузка должна прикладываться с внешней стороны, наиболее удаленной от основного и навесного оборудования.
6.2.6 Исходное направление нагружения должно быть горизонтальным и перпендикулярным к вертикальной плоскости, проходящей через продольную осевую линию поворотной платформы. При деформации ROPS или поворотной платформы под нагрузкой допустимо изменять направление нагрузки.
6.2.7 Степень деформации должна быть такой, чтобы нагрузка рассматривалась как статическая. Прикладываемая нагрузка может рассматриваться как статическая, если скорость деформации в точке приложения нагрузки не превышает 5 мм/с. Усилие и деформация, измеренные в точке приложения нагрузки, должны быть записаны, если деформация возрастает не более чем на 15%.
Нагружение должно продолжаться до достижения требуемого усилия и энергии, или достижения в точке приложения нагрузки ROPS в зоне LBSGP жестких частей машины. На рисунке 9 приведена кривая для расчета энергии ![]() . Для расчета
. Для расчета ![]() используется деформация ROPS по линии действия силы. Деформация любых элементов, используемых для опоры устройства распределения нагрузки, не включается в общую деформацию.
используется деформация ROPS по линии действия силы. Деформация любых элементов, используемых для опоры устройства распределения нагрузки, не включается в общую деформацию.
Рисунок 9 - Кривая "усилие - деформация" для нагрузочных испытаний
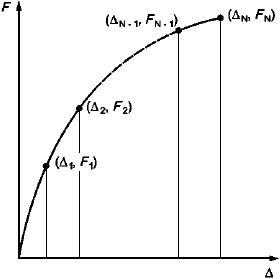
Энергия ![]() :
:![]()
![]() - сила,
- сила, ![]() - деформация
- деформация
Рисунок 9 - Кривая "усилие - деформация" для нагрузочных испытаний
6.3 Продольное нагружение ROPS
6.3.1 После снятия бокового нагружения продольная нагрузка должна быть приложена к верхним конструктивным элементам ROPS вдоль его продольной осевой линии. Устройство для распределения нагрузки должно действовать по ширине ![]() таким образом, чтобы можно было нагружать деформированное ROPS (рисунки 5 и 10).
таким образом, чтобы можно было нагружать деформированное ROPS (рисунки 5 и 10).
6.3.2 Продольная нагрузка должна прикладываться к твердому месту, определенному до бокового нагружения в соответствии с рисунком 10. Устройство для распределения нагрузки должно охватывать всю ширину.
Рисунок 10 - Устройство для распределения нагрузки при продольном нагружении

а - продольное устройство для распределения нагрузки без заднего поперечного элемента, способного передавать нагрузку без прогиба

b - продольное устройство распределения нагрузки в других случаях![]() - граничная плоскость;
- граничная плоскость; ![]() - точка приложения нагрузки;
- точка приложения нагрузки; ![]() - устройство для распределения нагрузки;
- устройство для распределения нагрузки; ![]() - соединительная муфта;
- соединительная муфта; ![]() - ширина устройства распределения нагрузки (равна ширине ROPS без заднего поперечного элемента, max 0,8
- ширина устройства распределения нагрузки (равна ширине ROPS без заднего поперечного элемента, max 0,8 ![]() в остальных случаях);
в остальных случаях); ![]() - ширина ROPS;
- ширина ROPS; ![]() - продольная осевая линия машины
- продольная осевая линия машины
Рисунок 10 - Устройство для распределения нагрузки при продольном нагружении
6.3.3 Продольная нагрузка должна прикладываться к твердому месту, определенному до бокового нагружения в соответствии с рисунком 3. Устройство для распределения нагрузки должно охватывать всю ширину в том случае, когда нет заднего (переднего) поперечного элемента, способного передавать нагрузку без прогиба. Во всех других случаях устройство не должно распределять нагрузку на длине более 80% ширины ![]() (рисунок 3).
(рисунок 3).
6.3.4 Для всех машин направление нагружения (спереди или сзади) должно быть выбрано в том месте ROPS/рамы машины в сборе, к которому предъявляются наиболее жесткие требования. Начальное направление нагрузки должно быть горизонтально и параллельно осевой линии машины. При определении направления приложения продольной нагрузки необходимо учитывать следующие факторы:
a) расположение ROPS относительно DVL с учетом продольной деформации ROPS и обеспечения защиты от раздавливания оператора;
b) характеристики машины и ее конструктивных элементов, которые могут сопротивляться продольной деформации и ограничивать продольное перемещение компонентов нагружаемого ROPS;
с) любой опыт, показывающий возможность продольного опрокидывания или тенденцию к перевороту машины в частных случаях, искажающую переворот вокруг продольной оси во время фактического опрокидывания.
6.3.5 Задняя продольная нагрузка должна быть приложена к верхним конструктивным элементам ROPS вдоль его осевой линии, чтобы учесть возможность переворота, когда верхняя часть машины поворачивается по часовой стрелке от 0 до 90° относительно нижней части. Требуемое значение продольной энергии - см. 6.2.7 для руководства, п.8 для определения критериев.
6.3.6 Степень деформации должна быть такой, чтобы нагружение можно было рассматривать как статическое (см. 6.2.7).
Нагружение ROPS должно продолжаться, пока продольная энергия не достигнет требуемого уровня или деформации ROPS достигнут значений LBSGP/VBSGP, заданных жесткими частями машины.
6.4 Вертикальное нагружение ROPS
6.4.1 После завершения бокового и продольного нагружений ROPS вертикальная нагрузка должна быть приложена сверху.
6.4.2 Для ROPS всех типов центр вертикальной нагрузки должен располагаться в вертикальной плоскости, перпендикулярной продольной осевой линии конструкции, как для бокового нагружения до деформации, согласно п.6.2.
6.4.3 Нагрузка на ROPS прикладывается без ограничения способов ее распределения при условии симметричного приложения относительно продольной оси деформируемой конструкции (в соответствии с промаркированной точкой приложения нагрузки, см. 6.1.2). На рисунке 11 приведен способ приложения вертикальной нагрузки.
Рисунок 11 - Схема вертикального нагружения

1 - ROPS;
2 - поворотная рама; 3 - стрела; 4 - гидроцилиндр стрелы; 5 - опорная плита; 6 - вертикально нагружающее приспособление; 7 - вертикальная нагрузка
Рисунок 11 - Схема вертикального нагружения
6.4.4 Степень деформации должна быть такой, чтобы нагрузка рассматривалась как статическая (см. 6.2.7)
Нагружение должно продолжаться до тех пор, пока не будет достигнуто усилие, приведенное в таблице 1, или деформация ROPS не достигнет VBSGP, заданного жесткими верхними частями машины.
7 Критерии температуры и материала
7.1 В дополнение требований к нагружению существуют требования к материалу и температурному режиму, обеспечивающие значительную сопротивляемость ROPS хрупкому разрушению. Это требование может выполняться при статическом нагружении всех конструктивных элементов при температуре минус 18°С или ниже и при условии, что ROPS изготовлено из материалов с характеристиками ударной вязкости, равными или большими применяемых в испытываемом представительном образце. Это требование также может выполняться при нагружении при более высокой температуре, если все конструктивные элементы ROPS изготовлены из материалов, отвечающих механическим требованиям, приведенным в 7.2-7.4.
7.2 Болты, используемые в конструкциях, должны быть с метрической резьбой классов 8.8, 9.8 или 10.9 в соответствии с требованиями ISO 898-1. Гайки, используемые в конструкциях, должны быть с метрической резьбой класса 8 или 10 в соответствии с требованиями ISO 898-2.
Примечание 1 - В странах, где используется дюймовая система, болты и гайки должны быть эквивалентного качества.
Примечание 2 - Если используются болты класса выше 10.9 или гайки класса выше 10, то может потребоваться контроль качества для предотвращения хрупкого или замедленного разрушения.
7.3 Конструктивные элементы ROPS и монтажные элементы, крепящие ROPS к раме машины, должны изготавливаться из сталей, с равной или большей ударной вязкостью по методу Шарпи для образца с V-образным надрезом в соответствии с таблицей 1 или критериями п.7.4. Оценка по методу Шарпи для образца с V-образным надрезом является основной контрольной проверкой качества, указанная температура не имеет прямого отношения к условиям эксплуатации.
Таблица 1 - Минимальная ударная вязкость по методу Шарпи для образца с V-образным надрезом
Размеры образца, мм | Энергия при минус 30°С | Энергия при минус 20°С |
10х10 | 11 | 27,5 |
10x9 | 10 | 25 |
10x8 | 9,5 | 24 |
10х7,5 | 9,5 | 24 |
10x7 | 9 | 22,5 |
10x6,7 | 8,5 | 21 |
10x6 | 8 | 20 |
10x5 | 7,5 | 19 |
10x4 | 7 | 17,5 |
10x3,3 | 6 | 15 |
10x3 | 6 | 15 |
10x2,5 | 5,5 | 14 |
|
Образцы должны быть "прямолинейными" и выполнены из полосового проката, трубчатых или фасонных заготовок перед гибкой или сваркой для использования в ROPS. Образцы из трубчатого или фасонного проката должны быть взяты из середины наибольшей боковой стороны и не должны иметь сварных швов (см. ISO 148-1).
7.4 Необходимо принимать во внимание следующие требования (по методу Шарпи) для образца с V-образным надрезом:
a) для стали тоньше 2,5 мм максимальное содержание углерода должно быть 0,2%;
b) для спокойных мелкозернистых сталей с листом толщиной от 2,5 до 4 мм максимальное содержание углерода должно быть 0,2%.
8 Критерии приемки
8.1 Установленные значения бокового усилия и энергии, продольной энергии и вертикальной несущей способности должны соответствовать или превышать значения, полученные при испытаниях одного представительного образца. Формулы, приведенные в таблице 2, должны использоваться для определения значений для машин без подъемного механизма кабины.
Формулы, приведенные в таблице 3, должны использоваться для определения значений для машин с установленным механизмом подъема кабины.
Усилие и энергия при боковом нагружении не могут быть достигнуты одновременно. Значение одного из этих показателей может превышать другое.
Если усилие опережает энергию, то усилие можно уменьшить, но затем снова увеличить до требуемого уровня, если энергия достигла или превысила требуемое значение.
Нагружение ROPS или конструкции кабины может быть прекращено по достижении LBSGP и/или VBSGP, пока не достигнуты соответствующие уровни энергии или усилия, приведенные в таблицах 2 и 3.
Таблица 2 - Формулы для определения энергии и усилия. Машины без подъемного механизма кабины
Энергия при боковом нагружении |
|
Усилие при боковом нагружении |
|
Энергия при продольном нагружении |
|
Усилие при вертикальном нагружении |
|
Таблица 3 - Формулы для определения энергии и усилия. Машины с подъемным механизмом кабины
Показатели | Подъем кабины | ||
низкий - до 500 мм | средний - 500-1300 мм | высокий - 1300 мм (TOPS) | |
Энергия при боковом нагружении |
| ||
Усилие при боковом нагружении |
|
| |
Энергия при продольном нагружеини |
| ||
Усилие при вертикальном нагружении |
|
|
|
Примечание 1 - Характер опрокидывания машин с подъемным механизмом кабины требует дальнейшего изучения. Производитель должен учитывать эти риски и устанавливать более высокие требования к защите таких машин по сравнению с базовыми. |
8.2 Обязательные ограничения по деформациям: никакая часть ROPS не должна проникать в верхнюю часть DVL выше LA (LA - расположение осей, см. ISO 3164) в течение всего времени испытаний при боковом нагружении. Исключением является ограничение нагружения при перемещениях, достигающих LBSGP и проверяемых в соответствии с 6.1.5. Допустим также наклон DVL, см. п.8.5.
8.3 Ни одна из частей ROPS не должна проникать в DVL в течение всего времени испытаний при продольном нагружении. Допустим наклон DVL, см. п.8.6.
8.4 Ни одна из частей ROPS не должна проникать в DVL в течение всего времени испытаний при вертикальном нагружении. Исключением является ограничение нагружения при перемещениях, достигающих LBSGP и, проверяемых в соответствии с 6.1.5 (рисунок 13, b). Допустим также наклон DVL, см. пп.8.5 и 8.6.
8.5 При боковом нагружении допускается поворот верхней части DVL в сторону относительно SIP (см. ISO 5353). Поворот должен быть менее 15°, если было соприкосновение с любыми деталями машины или органами управления при меньшем угле. Допускается дополнительный поворот верхней части при деформации основания, на котором находится DVL.
Рисунок 12 - Наклон верхней части DVL
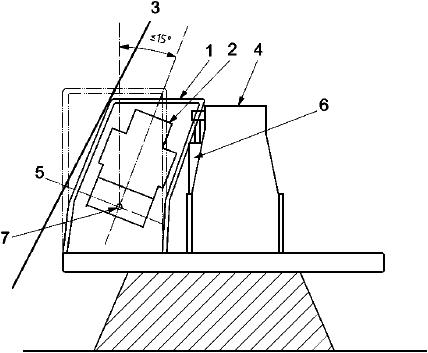
а - ROPS на поворотной раме машины со стрелой и стреловым цилиндром для нагрузочных испытаний
b - ROPS и LBSGP
1 - ROPS;
2 - DVL;
3 - LSGP;
4 - стрела; 5 - LA; 6 - цилиндр стрелы; 7 - SIP; 8 - LBSGP
Примечание - После прекращения бокового нагружения продольное и вертикальное нагружения могут привести к дополнительной деформации ROPS (кроме показанной выше). ROPS должно быть рассчитано на эту деформацию по критериям приемки для продольного, а затем вертикального нагружения.
Рисунок 12 - Наклон верхней части DVL
8.6 При продольном нагружении допускается наклон верхней части DVL в прямом направлении на 15° относительно LA (как определено в ISO 3164), чтобы предотвратить проникновение элементов ROPS. Наклон DVL вперед должен быть менее 15°, если был контакт с любыми деталями машины или органами управления при меньшем угле.
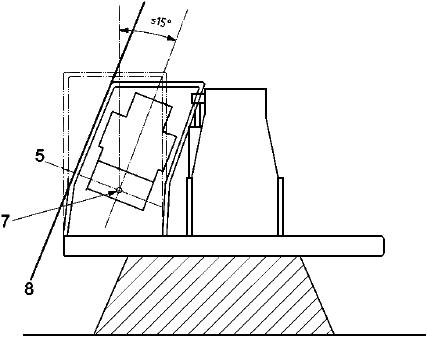
Рисунок 13 - Наклон DVL вперед под воздействием вертикального нагружения

а - ROPS с верхней частью машины и основным и дополнительным оборудованием для нагрузочных испытаний

b - ROPS и VBSGP
1 - ROPS;
2 - DVL;
3 - стрела; 4 - противовес; 5 - LA, SIP; 6 - VBSGP
Рисунок 13 - Наклон DVL вперед под воздействием вертикального нагружения
8.7 ROPS не должно отрываться от поворотной платформы при разделении ROPS, его системы крепления или поворотной платформы. В случае частичного разделения должна быть продемонстрирована возможность предотвращения полного отделения ROPS от машины при требуемых уровнях усилия и энергии.
9 Маркировка ROPS
9.1 Общие требования
Информация о ROPS, соответствующая требованиям настоящего стандарта, должна быть внесена в заводскую табличку в соответствии с пп.9.2 и 9.3.
Информация об OPG (см. ISO 10262) или FOPS (устройства защиты от падающих предметов) может быть включена в заводскую табличку.
9.2 Требования к заводской табличке
9.2.1 Заводская табличка должна быть долговечной и прочно крепиться на конструкции.
9.2.2 Заводская табличка должна крепиться на конструкции таким образом, чтобы она легко читалась и была защищена от негативных погодных воздействий.
9.3 Содержание заводской таблички
Заводская табличка должна содержать следующую информацию:
a) модель и идентификационный номер ROPS;
b) модели или серийные номера машин, для которых спроектировано это ROPS;
c) наименование стандарта(ов), техническим требованиям которого(ых) соответствует конструкция ROPS; могут быть включены национальные и/или региональные требования;
d) другие сведения, которые производитель сочтет целесообразными, например о монтаже, ремонте или замене деталей.
10 Отчет об испытаниях
Результаты испытаний должны быть оформлены с использованием информации, приведенной в приложении А.
11 Руководство по эксплуатации
Изготовитель машины должен четко описать в руководстве по эксплуатации условия применения ROPS в соответствии с настоящим стандартом, технические требования к базовой машине, основное и навесное оборудование (включая их модификации), для которых ROPS может быть сертифицирован как защитная конструкция.
Приложение А (обязательное). Протокол испытаний ROPS согласно ISO 12117-2
Приложение А
(обязательное)
А.1 Идентификация
А.1.1 Машина
Тип:
Производитель:
Модель:
Серийный номер (если имеется):
Номер поворотной платформы:
А.1.2 ROPS
Производитель:
Тип и модель:
Серийный номер:
Номер детали ROPS (если имеется):
А.2 Информация, предоставляемая производителем (производителями)
А.2.1 ROPS
Максимальная эксплуатационная масса применяемых деталей ROPS, кг:
Масса испытываемой машины, кг:
Геометрические размеры:
Расположение DVL:
А.2.2 Условия нагружения
Трехмерные геометрические данные боковой граничной имитируемой плоскости грунта (LBSGP):
Трехмерные геометрические данные вертикальной граничной имитируемой плоскости грунта (VBSGP):
А.3 Критерии
Боковая нагрузка, Н:
Энергия боковой нагрузки, Дж:
Энергия продольной нагрузки, Дж:
Вертикальная нагрузка, Н:
А.4 Результаты испытаний
А.4.1 Расположение боковой граничной имитируемой плоскости грунта (LBSGP) и вертикальной граничной имитируемой плоскости грунта (VBSGP)
Геометрические данные боковой граничной имитируемой плоскости грунта (LBSGP) (если имеются):
Геометрические данные вертикальной граничной имитируемой плоскости грунта (VBSGP) (если имеются):
А.4.2 Боковое нагружение
Достигнутые или превышенные значения силы и/или энергии без проникновения конструктивных элементов ROPS в DVL:
Максимальная сила, достигнутая после достижения или превышения требуемой энергии, Н:
Поглощенная энергия, Дж: или
Достигнутая нагрузка, указанная в п.8.1.2, Н:
Достигнутая нагрузка, Н:
Достигнутая энергия нагрузки, Дж:
Боковые силы, действующие на жесткие части машины, Н:
Зазор между DVL и ROPS, мм:
А.4.3 Продольное нагружение
Достигнутые или превышенные значения энергии без проникновения конструктивных элементов ROPS в DVL:
Максимально достигнутая энергия, Дж:
Зазор между DVL и ROPS, мм:
А.4.4 Вертикальное нагружение
Достигнутые или превышенные значения вертикальной нагрузки без проникновения конструктивных элементов ROPS в DVL, Н
Максимальная нагрузка, Н: или
Достигнутая нагрузка, Н:
Вертикальная нагрузка, приложенная к верхним жестким частям машины, Н:
Зазор между DVL и ROPS, мм:
А.4.5 Температура и материалы
А.4.5.1 Испытание было проведено с ROPS и элементами поворотной платформы при °С:
А.4.5.2 (Прекращаются если температура А.4.5.1 ниже минус 18°С)
Требования к ударной вязкости по методу Шарпи для образца с V-образным надрезом для конструктивных металлических элементов ROPS проверены на представительном образце размером ..... мм![]() .... мм.
.... мм.
Поглощенная энергия, Дж:
Класс гайки:
Класс болта:
А.5 Заключение
Минимальные эксплуатационные требования настоящего стандарта соблюдены при испытаниях машины с максимальной массой, кг:
Модель ROPS (если указано):
Модель экскаватора, на который устанавливается испытываемое ROPS:
Дата испытаний:
Наименование и местонахождение средств испытаний:
Инженер-испытатель:
Дата протокола испытаний:
Приложение В (справочное). Изменения в конструкции, испытания и модификации
Приложение В
(справочное)
В.1 Изменения в конструкции
Любые изменения конструкции ROPS или рамы машины требуют проведения натурных испытаний, если не будет доказано что:
a) все, даже небольшие изменения в чертежах были проверены в ходе натурных испытаний;
или
b) изменения не оказали отрицательного влияния на эксплуатационные свойства ROPS и рамы машины.
В.2 Модификация или ремонт
Любая ROPS, имеющая видимую деформацию, не может быть повторно использована.
Не допускаются никакие изменения или ремонт защитной конструкции, за исключением разрешенных производителем. Конструкции, которые подвергались ремонту или модификации без такого разрешения, не соответствуют требованиям настоящего стандарта.
В.3 Альтернатива натурным испытаниям
Теоретический анализ новой конструкции ROPS не может быть альтернативой натурным испытаниям.
Приложение С (справочное). Обоснование требований к конструкции ROPS
Приложение С
(справочное)
С.1 Общие требования
В данном приложении разъясняется разработка критериев.
Обсуждаемые моменты - специфические свойства экскаваторов, перечисленные ниже, и определение отличительных свойств ROPS экскаваторов от ROPS других землеройных машин:
- возможность использования в качестве защиты при полном или частичном опрокидывании стрелы или других жестких частей;
- большие размеры основного и навесного оборудования (стрелы, рукояти, ковша) и широкий рабочий диапазон применения этих машин;
- поворот верхней части конструкции на 360°.
Технической основой настоящего стандарта являются:
- общий анализ несчастных случаев;
- испытания при реальном опрокидывании;
- анализ моделирования, проведенного в США и Японии с использованием программного обеспечения ADAMS и PAM/CRASH;
- дополнительный анализ моделирования, проведенный японскими специалистами;
- реальные испытания на опрокидывание компактных экскаваторов.
Вышеупомянутое отражено в приложении С.2-С.5.
С.2 Граничная имитируемая плоскость грунта (BSGP)
Как правило, подразумевается, что в случае переворота или опрокидывания экскаватора стрела может обеспечить некоторую защиту оператора. Например, в отчете о 38 случаях полного или частичного опрокидывания или падения с высоты при производстве работ в Японии в период с 1996 по 1999 годы в 31 случае из 38 деформация кабины была ограничена, и DVL в основном сохранялся. Концепция BSGP разработана с целью принятия во внимание такой защиты.
В случае переворота экскаватора (первый случай) при условии, что плоскость, проходящая через три точки машины (наивысшая часть стрелы, передняя левая часть рамы, верхняя левая часть противовеса), касается земли и что пространство оператора (представленное DVL) не касается конструктивных элементов ROPS или земли (грунта), оператор в кабине считается эффективно защищенным. Если машина полностью опрокинулась (второй случай), при условии что плоскость, проходящая через верхнюю часть стрелы и верхнюю часть заднего противовеса, касается земли, a DVL не касается конструктивных элементов ROPS или земли, то оператор в кабине также считается защищенным.
В настоящем стандарте BSGP (как и LBSGP и VBSGP) используется, чтобы избежать путаницы с LSGP и VSGP (вертикальная моделируемая плоскость грунта), определенных и используемых в ISO 3471. Плоскость в первом случае определяется как LBSGP (боковая граничная имитируемая плоскость грунта), а во втором случае как VBSGP (вертикальная граничная имитируемая плоскость грунта).
С.2.1 Точки жесткости BSGP
LBSGP включает три точки жесткости: край противовеса с левой стороны, наивысшая точка стрелы с левой стороны, передняя часть рамы с левой стороны.
VBSGP включает в себя три точки жесткости: наивысшая точка (точки) стрелы и образуемая двумя точками задняя верхняя линия противовеса.
С.2.2 Проверка точек жесткости
Для проверки точек жесткости в качестве нагрузки рассматривается нагружение каждой точки жесткости массой машины. С учетом ускорения силы тяжести и полученного смещения устанавливают LBSGP и/или VBSGP. Если принимается решение применять LBSGP и/или VBSGP для целей оценки ROPS, то необходима процедура проверки в соответствии с 6.1.5.
Примечание - Процедура проверки точек жесткости, приведенная в 6.1.5, не является обязательной. Производитель может на выбор спроектировать ROPS таким образом, чтобы оно удовлетворяло требования, приведенные в таблицах 2 и 3, или проектировать жесткие части машины так, чтобы при боковом нагружении ROPS плоскости LBSGP и/или VBSGP не проникали в DVL. В последнем случае требуется процедура проверки.
С.2.3 Необходимость натурных испытаний в случае применения критериев LBSGP и/или VBSGP
Применение критериев LBSGP и/или VBSGP не означает, что не нужно проводить испытания ROPS на боковое, продольное и вертикальное нагружение. Критерии LBSGP применимы при испытаниях на боковое нагружение и заменяют требования к нагрузке/энергии/силе, приведенные в таблицах 2 и 3. Критерии VBSGP также применимы при испытаниях на вертикальное нагружение и заменяют требования к вертикальной силе, приведенные таблицах 2 и 3.
С.3 Энергия в продольном направлении
Испытания на опрокидывание проводились при установленных параллельно верхней части и шасси машины. В этом случае предполагается, что продольной энергии, воздействующей на ROPS, нет либо она так мала, что ей можно пренебречь. Однако анализ моделирования, проведенного в США, показал, что значительная энергия может распространяться в продольном направлении в случае поворота верхней части машины под определенным углом к шасси.
При повороте верхней части против часовой стрелки относительно нижней части часть энергии распространяется в продольном направлении к левой передней части кабины. Считается, что машина в таком положении редко переворачивается. Если это случается, то кабина получает, лишь незначительные повреждения, ограниченные пределами LBSGP. Защита оператора считается обеспеченной.
Примечание - Дополнительный анализ моделирования в Японии показал, что затруднительно перевернуть машину, когда поворотная платформа повернута против часовой стрелки с основным и навесным оборудованием в положении максимального вылета над землей. Подъем стрелы из положения максимального вылета может служить началом переворота, но эта позиция может ограничить дальнейшую деформацию кабины из-за LBSGP.
В позиции, когда поворотная платформа повернута против часовой стрелки, считается, что определенная нагрузка приложена сзади. Дополнительный анализ моделирования в Японии показывает, что продольное усилие нагрузки составляет 1,47![]() (0,15
(0,15![]() ) для поворотной платформы в параллельной позиции и 1,37
) для поворотной платформы в параллельной позиции и 1,37![]() (0,15
(0,15![]() ) в позиции по часовой стрелке. Считается, что довольно малое значение для продольного нагружения - одна треть требуемой энергии от установленной. Это одна треть нагрузки от рекомендованной для компактных экскаваторов TOPS (см. ISO 12117-1).
) в позиции по часовой стрелке. Считается, что довольно малое значение для продольного нагружения - одна треть требуемой энергии от установленной. Это одна треть нагрузки от рекомендованной для компактных экскаваторов TOPS (см. ISO 12117-1).
С.4 Сила вертикальной нагрузки
Считается, что экскаватор может опираться главным образом на верхнюю часть стрелы при перевороте, в то время как опора других землеройных машин в перевернутом положении приходится в основном на кабину. Поэтому требования для других землеройных машин к вертикальной нагрузке ROPS, равное 2![]() (19,61
(19,61![]() ), могут быть смягчены. Результаты фактического опрокидывания экскаватора массой 20 т показывают, что вертикальная нагрузка составляет от 1
), могут быть смягчены. Результаты фактического опрокидывания экскаватора массой 20 т показывают, что вертикальная нагрузка составляет от 1![]() (9,8
(9,8![]() ) (остаточная деформация игнорируется) до 0,7
) (остаточная деформация игнорируется) до 0,7![]() (7
(7![]() ) (остаточная деформация учитывается). Результаты анализа РАМ/CRASH показывают, что вертикальная нагрузка составляет от 0,9
) (остаточная деформация учитывается). Результаты анализа РАМ/CRASH показывают, что вертикальная нагрузка составляет от 0,9![]() (9
(9![]() ) до 1,2
) до 1,2![]() (12
(12![]() ).
).
Основываясь на этих результатах, значение 1,3![]() можно принять как среднее с учетом отклонений.
можно принять как среднее с учетом отклонений.
Примечание - Дополнительный анализ моделирования в Японии показал, что вертикальная нагрузка на ROPS составляет 11,6![]() (1,18
(1,18![]() ) для верхней поворотной платформы в параллельной позиции и 11,3
) для верхней поворотной платформы в параллельной позиции и 11,3![]() (1,16
(1,16![]() ) в позиции по часовой стрелке.
) в позиции по часовой стрелке.
С.5 Наихудший случай нагружения
При испытаниях на проверку упругой деформации ROPS в соответствии с настоящим стандартом должен быть принят во внимание наихудший случай.
Например, при боковом нагружении ROPS стрела и/или цилиндр могут контактировать с ROPS в местах сварных соединений. Они могут быть слабым местом, что может повлиять на характеристики ROPS.
С.6 Боковая нагрузка
Для применения критериев боковой нагрузки был выполнен анализ расчетов нагружающих сил для ROPS экскаватора и бульдозера. Сравнение боковых нагрузок на ROPS по максимальному смещению показало, что нагрузка (по массе машины) на ROPS экскаватора составляет половину по отношению к ROPS бульдозера. Соответственно критерии боковой нагрузки ROPS экскаватора принимают как половину нагрузки для бульдозера.
С.7 Наклон DVL
Принимая во внимание, что кабина экскаватора достаточна узкая, допускается поворот DVL до 15° относительно SIP. Это обусловлено существующими условиями работы компактных экскаваторов (см. ISO 12117-1).
Приложение ДА (справочное). Сведения о соответствии межгосударственных стандартов ссылочным международным стандартам
Приложение ДА
(справочное)
Таблица ДА
Обозначение и наименование ссылочного международного стандарта | Степень соответствия | Обозначение и наименование соответствующего межгосударственного стандарта |
ISO 3164 Машины землеройные. Защитные устройства. Характеристика объема ограничения деформации при лабораторных испытаниях | - | * |
ISO 5353 Машины землеройные, тракторы и машины для сельского и лесного хозяйства. Контрольная точка сиденья | IDT | ГОСТ ISO 5353-2003** Машины землеройные, тракторы и машины для сельскохозяйственных работ и лесоводства. Контрольная точка сиденья |
ISO 6165 Машины землеройные. Классификация. Термины и определения | - | * |
ISO 9248 Машины землеройные. Единицы измерения размеров, эксплуатационных показателей производительности и допуски на измерения | - | * |
* Соответствующий межгосударственный стандарт отсутствует. До его утверждения рекомендуется использовать перевод на русский язык данного международного стандарта. Перевод данного международного стандарта находится в Федеральном информационном фонде технических регламентов и стандартов. |
________________
** На территории Российской Федерации действует ГОСТ Р ИСО 5353-2012. - .
Библиография
[1] | ISO 148-1 | Metallic materials - Charpy pendulum impact test - Part 1: Test method (Материалы металлические. Испытание на удар по Шарпи на маятниковом копре. Часть 1. Метод испытания) |
[2] | ISO 898-1 | Mechanical properties of fasteners made of carbon steel and alloy steel - Part 1: Bolts, screws and studs (Механические свойства крепежных изделий из углеродистой и легированной стали. Часть 1. Болты, винты и шпильки с заданным классом прочности. Крупная и мелкая резьба) |
[3] | ISO 898-2 | Mechanical properties of fasteners - Part 2: Nuts with specified proof load values - Coarse thread (Механические свойства крепежных изделий из углеродистой стали и легированной стали. Часть 2. Гайки установленного класса прочности. Крупная и мелкая резьба) |
[4] | ISO 3449 | Earth-moving machinery - Falling-object protective structures - Laboratory tests and performance requirements (Машины землеройные. Конструкции, защищающие водителя от падающих предметов. Лабораторные испытания и эксплуатационные требования) |
[5] | ISO 3471 | Earth-moving machinery - Roll-over protective structures - Laboratory tests and performance requirements (Машины землеройные. Устройства для защиты при опрокидывании машин. Лабораторные испытания и эксплуатационные требования) |
[6] | ISO 6016 | Earth-moving machinery - Methods of measuring the masses of whole machines, their equipment and components (Машины землеройные. Методы измерения массы машин в целом, их рабочего оборудования и узлов) |
[7] | ISO 6683:2005 | Earth-moving machinery - Seat belts and seat belt anchorages. Performance requirements and tests (Машины землеройные. Ремни безопасности и крепление ремней безопасности. Эксплуатационные требования и испытания) |
[8] | ISO 10262:1998 | Earth-moving machinery - Hydraulic excavators - Laboratory tests and performance requirements for operator protective guards (Машины землеройные. Гидравлические экскаваторы. Лабораторные испытания и требования к характеристикам щитков для защиты оператора) |
[9] | ISO 12117-1 | Earth-moving machinery - Tip-over protection structure (TOPS) for compact excavators - Laboratory tests and performance requirements (Машины землеройные. Конструкция для защиты от опрокидывания (TOPS) для миниэкскаваторов. Лабораторные испытания и эксплуатационные требования) |
[10] | EN 13510 | Earth-moving machinery - Roll-over protective structures - Laboratory tests and performance requirements (Машины землеройные. Устройства защиты при опрокидывании. Лабораторные испытания и требования к эксплуатационным характеристикам) |
УДК 621.869.4-788:629.614.006.354 | МКС 53.100 | IDT |
Ключевые слова: машины землеройные, защитные конструкции экскаваторов, устройства для защиты от опрокидывания (ROPS), методы испытаний |
Электронный текст документа
и сверен по:
официальное издание
М.: Стандартинформ, 2014
{kind=link}