ГОСТ Р 55109-2012
Группа Э50
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Глобальные навигационные спутниковые системы
МОРСКИЕ ДИФФЕРЕНЦИАЛЬНЫЕ ПОДСИСТЕМЫ. СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ
Общие требования, методы и требуемые результаты испытаний
Global navigation satellite systems. Maritime differential subsystems. The remote control and operation system. General requirements, test methods and required test results
ОКС 47.020.40
Дата введения 2013-05-01
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. N 184-ФЗ "О техническом регулировании", а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004* "Стандартизация в Российской Федерации. Основные положения"
________________
* На территории Российской Федерации документ не действует. Действует ГОСТ Р 1.0-2012. - .
Сведения о стандарте
1 РАЗРАБОТАН Закрытым акционерным обществом "Центральный научно-исследовательский и проектно-конструкторский институт морского флота" (ЗАО "ЦНИИМФ")
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 363 "Радионавигация"
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 ноября 2012 г. N 811-ст
4 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе "Национальные стандарты", а текст изменений и поправок - в ежемесячно издаваемом информационном указателе "Национальные стандарты". В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе "Национальные стандарты". Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
1 Область применения
Настоящий стандарт распространяется на систему дистанционного контроля и управления, реализуемую с помощью удаленной контрольно-управляющей станции (УКУС), входящую в состав контрольно-корректирующей станции (ККС) морской дифференциальной подсистемы глобальной навигационной спутниковой системы (ГНСС) ГЛОНАСС/GPS/ГАЛИЛЕО, используемой на водном транспорте [1].
Настоящий стандарт устанавливает требования к техническим характеристикам УКУС, перечню RSIM сообщений, методам и нормам установки параметров опорной станции, станции интегрального контроля и радиомаяка, а также требуемые результаты испытаний системы дистанционного контроля и управления.
Настоящий стандарт определяет состав, функциональное назначение, взаимосвязь элементов и выходные параметры УКУС в составе ККС.
Настоящий стандарт не распространяется на дополнительные возможности, связанные с вычислительными функциями и передачей выходных данных, которые обеспечены в аппаратуре и которые не должны ухудшать основные характеристики контрольно-корректирующей станции [2].
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р 52866-2007 Глобальная навигационная спутниковая система. Станция контрольно-корректирующая локальная гражданского назначения. Технические требования
ГОСТ Р МЭК 60945-2007 Морское навигационное оборудование и средства радиосвязи. Общие требования. Методы испытаний и требуемые результаты испытаний
ГОСТ Р 52928-2010 Система спутниковая навигационная глобальная. Термины и определения
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодно издаваемому информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по соответствующим ежемесячно издаваемым информационным указателям, опубликованным в текущем году. Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться замененным (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
3 Термины, определения, обозначения и сокращения
3.1 В настоящем стандарте применены термины по ГОСТ Р 52928, а также следующие термины с соответствующими определениями:
3.1.1 абсолютные координаты: Пространственные координаты объекта в прямоугольной геоцентрической системе координат или на земном эллипсоиде.
3.1.2 возраст поправок: Разность между отсчетом времени (модифицированный Z-счет) в заголовке сообщения RTCM о поправках и текущим временем ГНСС ГЛОНАСС и GPS.
3.1.3 временной сдвиг: Расхождение шкал времени приемной аппаратуры и времени UTC (SU).
3.1.4 возвышение спутника: Угол возвышения спутника над горизонтом.
3.1.5 время ожидания: Разность между временем передачи опорной станцией первого бита данного сообщения и меткой времени в заголовке сообщений поправок псевдодальностей, переданных опорной станцией. Метка времени в заголовке сообщения является отсчетом времени (т.н. модифицированный Z-счет), который наиболее близок ко времени последнего измерения, на момент которого выработаны поправки.
3.1.6 геометрический фактор: Величина, характеризующая качественную оценку точности измерений координат и времени в спутниковых навигационных системах.
3.1.7 дифференциальные поправки: Корректирующие поправки, передаваемые контрольно-корректирующими станциями для повышения точности определения координат места.
3.1.8 дифференциальный режим: Режим работы навигационной аппаратуры потребителей с целью достижения в заданном районе прецизионной точности обсерваций с учетом дифференциальных поправок.
3.1.9 доступность системы: Вероятность получения потребителем в рабочей зоне достоверной информации о своем местоположении в заданный момент времени и с требуемой точностью. Процент времени на определенном временном интервале, в течение которого обеспечиваются заданные условия.
3.1.10 индикатор качества поправок: Показатель качества поправок псевдодальностей, определяемых на синхронизированные моменты времени приема поправок от одного и того же спутника.
3.1.11 корректирующая информация: Данные, содержащие дифференциальные поправки к измеряемым навигационным параметрам и другие сообщения, используемые в навигационной аппаратуре потребителя для повышения точности и надежности навигационных определений.
3.1.12 обсервация: Навигационное наблюдение с целью получения информации о координатах места потребителя.
3.1.13 опорная станция; ОС: Радиотехническое оборудование, входящее в состав контрольно-корректирующей станции и предназначенное для определения дифференциальных поправок.
3.1.14 погрешность дифференциальной дальности потребителя; UDRE: Средняя квадратическая погрешность поправки псевдодальности из-за влияния окружающего шума и разности в многолучевости принимаемых сигналов.
3.1.15 погрешность навигационного определения: Статистическая характеристика разности между найденным положением потребителя и истинными координатами для произвольной точки в зоне обслуживания в течение заданного интервала времени.
3.1.16 процент ошибочных сообщений: Число информационных битов, принятых с ошибками, отнесенное к общему числу переданных битов.
3.1.17 программная переустановка данных ККС: Перезапуск всех вычислений, производимых опорной станцией.
3.1.18 разность псевдодальностей: Неисправленная составляющая погрешности каждой поправки псевдодальности.
3.1.19 разность скорости изменения псевдодальности: Разность между последней полученной поправкой скорости изменения псевдодальности и текущей скоростью изменения псевдодальности, измеренной на станции интегрального контроля.
3.1.20 система координат: Опорная система координат, используемая для расчета координат места.
3.1.21 совместимость ГНСС: Способность раздельного или совместного использования различных навигационных систем и их функциональных дополнений без помех со стороны отдельной системы, отдельного функционального дополнения или отдельного сигнала системы.
3.1.22 станция интегрального контроля; СИК: Радиотехническое оборудование, входящее в состав ККС и предназначенное для непрерывного контроля содержания дифференциальных сообщений, формируемых опорной станцией, а также целостности сигналов ККС и параметров радиомаяка.
3.1.23 скорость передачи данных: Число информационных битов, передаваемых в секунду.
3.2 В настоящем стандарте применены следующие обозначения и сокращения:
БПВ - блок приемо-вычислительный;
ГАЛИЛЕО - Европейская глобальная спутниковая система;
ГЛОНАСС - глобальная навигационная спутниковая система Российской Федерации;
ДГЛОНАСС - дифференциальная подсистема ГНСС ГЛОНАСС;
ДГАЛИЛЕО - дифференциальная подсистема ГНСС ГАЛИЛЕО;
ДПС - дифференциальная подсистема;
КВУ - контрольное вычислительное устройство;
МДПС - морская дифференциальная подсистема;
НКА - навигационный космический аппарат;
ПЗ-90 - общеземная система координат "Параметры Земли 1990 г.";
ПМО - программно-математическое обеспечение;
PDOP - пространственный геометрический фактор ухудшения точности;
РМк - радиомаяк;
ALM - альманах спутниковых систем;
BCS Server - программа управления оборудованием ККС;
BCS Client - программа, обеспечивающая интерфейс пользователя;
GPS - глобальная навигационная спутниковая система Соединенных Штатов Америки;
DGPS - дифференциальная подсистема ГНСС GPS;
HDOP - горизонтальный геометрический фактор ухудшения точности местоопределения в режиме двухмерных измерений;
MER - процент ошибочных сообщений;
MSK - минимальный фазовый сдвиг;
PDOP - пространственный геометрический фактор ухудшения точности в режиме трехмерных измерений местоположения;
RRС - скорость изменения поправки псевдодальности;
RTCM - радиотехническая комиссия по морским службам;
RSIM - протокол обмена между опорной станцией и станцией интегрального контроля;
SNR - отношение сигнал/шум;
SS - уровень сигнала;
SV - видимый спутник;
UDRE - ошибка дифференциальной дальности потребителя;
URA - точность определения дальности потребителя;
UTC - универсальное координированное время;
UTC (SU) - координированное всемирное время России;
VDOP - геометрический фактор ухудшения точности по высоте;
WGS-84 - всемирная геодезическая система координат 1984 г.;
Z - count - "время формирования" поправки по шкале времени спутниковой системы.
4 Технические и эксплуатационные требования
4.1 Общие требования
Настоящий стандарт применим для различных вариантов использования МДПС, включая наземные и спутниковые линии связи для передачи корректирующей информации. Стандарт не распространяется на другие вычислительные возможности, которые обеспечены в оборудовании ККС.
В настоящем стандарте сообщения, передаваемые ККС потребителю, обозначаются как "RTCM - сообщение", а сообщения, передаваемые между узлами и элементами ККС, как "RSIM - сообщение" [2].
Сообщения RSIM обеспечивают стандартные форматы ввода-вывода данных для облегчения обмена информацией между опорной станцией, станцией интегрального контроля и контрольной станцией, вне зависимости от разработчика составных частей аппаратуры.
С целью уменьшения сложности комплектования оборудования число сообщений по возможности должно быть минимальным.
Сообщения с номерами 1-27 используются для стандартного режима работы GPS, номера 28-50 зарезервированы для дифференциального режима DGPS. Номера с 51 по 55 используются для стандартного режима работы ГЛОНАСС, а номера с 56 по 99 зарезервированы для дифференциального режима ДГЛОНАСС и ГАЛИЛЕО.
Сообщения с номерами 1-8, 10-27 пригодны также и для ДГЛОНАСС.
В настоящем стандарте приведены RSIM-сообщения, обеспечивающие работу оборудования при совместном и раздельном использовании ГНСС GPS и ГЛОНАСС.
4.1.1 Требования к навигационному обеспечению
Контрольно-корректирующая станция морской дифференциальной подсистемы ГНСС обеспечивает решение следующих задач [3]:
- прием и обработку ОС и СИК сигналов ГНСС ГЛОНАСС/GPS/ГАЛИЛЕО;
- измерение псевдодальностей по всем принимаемым сигналам ГНСС, временную привязку измерений к системной шкале ГНСС ГЛОНАСС (GPS);
- расчет дифференциальных поправок и формирование корректирующей информации для спутников ГНСС ГЛОНАСС, GPS и ГАЛИЛЕО;
- передачу КИ в диапазоне частот 283,5-325 кГц с использованием MSK модуляции (класс излучения G1D);
- обмен информацией между элементами ККС с использованием стандартизованных RSIM сообщений;
- непрерывный контроль качества функционирования элементов ККС;
- автоматическое переключение элементов ККС на резервный комплект.
Контроль работы дифференциальной подсистемы в реальном масштабе времени обеспечивает контрольная станция. КС принимает предупреждения и сигналы тревоги от ОС, а также по определенному графику сообщения о состоянии дифференциальной подсистемы.
Программа RSIM (Reference Station/Integrity Monitor) обеспечивает контроль параметров ОС и передатчика радиомаяка, а также возможность управления работой элементов ОС и СИК, включая изменения характеристик передач, переустановку данных, конфигурирование системы. Для обеспечения эффективного контроля используются каналы связи между ОС и КС, способные работать в реальном масштабе времени [4].
КС обеспечивает возможность текущего контроля функциональных и технических параметров МДПС, а также дистанционное управления работой ККС.
КС подтверждает работоспособность ККС, определение параметров передаваемых сообщений и контроль нормальной работы. Наличие КС в составе дифференциальной подсистемы особенно необходимо в случае применения МДПС в стесненных условиях плавания (фарватеры и подходные каналы), где требуется высокая доступность системы.
Контроль работы МДПС позволяет свести к минимуму возможность ошибочных обсерваций и гарантирует быстрое оповещение потребителей об отказах дифференциальной подсистемы или отклонении ее параметров за допустимые пределы, позволяя поддерживать целостность МДПС и своевременно оповещать о всех нарушениях нормальной работы.
В режиме диагностики дифференциальной подсистемы обмен информацией между ОС, СИК и КС осуществляется с помощью программы RSIM. Встроенная система тестового контроля позволяет обнаруживать отказы системы с вероятностью 0,995. КС и УКУС обязательны для условий эксплуатации МДПС.
4.1.2 Состав оборудования
В состав дифференциальной подсистемы должно входить следующее оборудование [5]:
- основной и резервный комплекты опорной станции с MSK-модулятором для расчета дифференциальных поправок, формирования корректирующей информации и передачи ее в передатчик радиомаяка;
- основной и резервный комплекты станции интегрального контроля для контроля качества формируемой корректирующей информации;
- контрольная станция для обеспечения возможности оперативного контроля состояния и управления функционированием ККС;
- аппаратура избирательного доступа;
- удаленная контрольно-управляющая станция;
- пункт контроля;
- передатчик для передачи корректирующей информации потребителям;
- антенна радиомаяка.
Методики испытаний должны соответствовать ГОСТ Р 52866, ГОСТ Р МЭК 60945.
Должна быть проведена оценка оборудования ККС на надежность (среднее время наработки на отказ и среднее время устранения неисправности), ремонтопригодность и требования к специальному оборудованию, безопасности.
4.1.2.1 Опорная станция
ОС использует эталонный приемник спутниковых сигналов и MSK - модулятор для формирования и передачи сообщений RTCM. Передача данных о коде и фазе сигнала в регистратор и/или в канал связи, осуществляется в зависимости от требований, предъявляемых к дифференциальной подсистеме. Рекомендуется размещение ОС и СИК в непосредственной близости от радиомаяка, так как это упрощает взаимодействие составных частей ККС и повышает надежность [5].
4.1.2.2 Станция интегрального контроля
СИК принимает диффпоправки и проверяет их достоверность, обеспечивая обратную связь с ОС для индикации и контроля ее нормального функционирования. При выходе корректирующей информации за допустимые пределы вырабатывается сигнал тревоги. Наиболее важными являются сигналы тревоги при превышении погрешности координат от эталонных значений свыше допустимых пределов, установленных в СИК.
4.1.2.3 Контрольная станция
Контрольная станция принимает информацию о нарушении нормальной работы дифференциальной подсистемы, локализует места отказов и вырабатывает соответствующие корректирующие воздействия. КС управляет также установкой и изменением параметров оборудования.
4.1.2.4 Линия передачи данных
ОС и СИК осуществляют обмен данными посредством входных/выходных портов и форматов обмена информацией с внешними устройствами. ОС и СИК имеют не менее 3-х портов: для обмена данными с КС, регистратором СИК и ОС [6].
4.1.2.5 Аппаратура избирательного доступа
Режим избирательного доступа предназначен для кодирования корректирующей информации и ее использования определенной группой потребителей, оборудованных соответствующей аппаратурой.
Режим избирательного доступа в МДПС реализуется с помощью специальных аппаратно-программных средств. На ККС устанавливается аппаратура избирательного доступа кодирующая (АИДРП-К), а в судовой аппаратуре потребителей устанавливается аппаратура избирательного доступа декодирующая (АИДРП-Д). Информация о введении режима избирательного доступа, ограничивающего использование поправок, доводится до потребителей, имеющих доступ к информации, и которые находятся в зоне действия морской дифференциальной подсистемы.
4.1.2.6 Удаленная контрольно-управляющая станция
Дистанционный контроль и управление работой ККС обеспечивается с помощью комплекса оборудования удаленной контрольно-управляющей станции, входящей в состав МДПС. Для эффективного контроля используется надежный канал связи между УКУС и ККС, способный работать в реальном масштабе времени. В качестве канала связи можно использовать стандартный выделенный телефонный канал со скоростью передачи данных не менее 2400 Бод.
Возможно использование телефонных радиоудлинителей. Существующие радиорелейные линии связи обеспечивают надежную связь между Центром размещения удаленной контрольно-управляющей станции и ККС МДПС.
4.1.2.7 Передатчик радиомаяка
Передатчик радиомаяка обеспечивает передачу корректирующей информации, формируемой ОС, используя класс излучения G1D.
4.1.2.8 Пункт контроля
ПК предназначен для непрерывного контроля рабочих параметров ККС в пределах объявленной зоны действия МДПС. Для оповещения ПК о нарушениях работы ККС используются выделенные каналы связи.
4.1.2.9 Регистратор данных
Регистратор данных предназначен для записи и хранения информации. Формат записи и программное обеспечение могут быть произвольными.
4.1.2.10 Резервирование аппаратуры
Для обеспечения требуемых эксплуатационных характеристик ККС могут применяться различные уровни резервирования. ОС и радиомаяк всегда должны иметь 100% резервирование. ККС должна иметь автономные источники электропитания, обеспечивающие ее работоспособность при временном отключении внешних источников.
4.2 Условные обозначения
4.2.1 Обозначение сообщений
Для морских радиомаяков используется ограниченное число RSIM сообщений. При этом допускается их использование и в других приложениях. Сообщения RSIM в данном документе обозначаются "RSIM #", сообщения RTCM SC-104 обозначаются "RTCM #". Наименование, номера RSIM# сообщений, единицы и диапазон их изменения даны в приложении 1, а также данные о типах используемых чисел:
- фиксированной или переменной длины;
- с плавающей запятой;
- фиксированный или переменный формат времени.
4.2.2 Общность в обозначениях со стандартами [6] [2].
Стандарт [6] обычно применяется для оборудования потребителя. Его стиль адаптирован, чтобы облегчить совместимость дифференциального оборудования по форматам RSIM.
Форматы RSIM сообщений используют многие из обозначений, принятых в стандарте [6]. Настоящий стандарт идентичен стандарту [4].
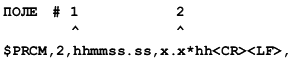
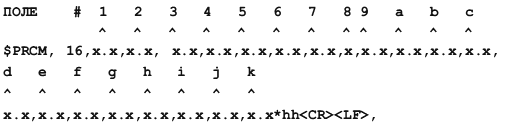
В соответствии с 5.2.1.3, для RTCM принято мнемоническое обозначение из трех символов "RCM", так что адресное поле "$PRCM" начинает каждое RSIM сообщение. Каждое RSIM сообщение заканчивается разделителем, контрольной суммой и разделителем конца предложения (*hh<CR><LF>).
В сообщениях RSIM поля универсального координированного времени, широты и долготы сходны с форматом, приведенным в [6] (таблица 6).
Любое поле может быть пустым, если информация, содержащаяся в нем, не используется. Также в RSIM сообщениях применяется схема составного линейного сообщения, используемая в сообщении NMEA "ALM".
Основными отличиями RSIM сообщения от формата данных [6] являются:
- максимальное число символов в предложении может превышать число 82, указанное в [6].
Это упрощает возможное увеличение размеров сообщений и устраняет ограничения по изменениям размера поля в зависимости от требуемой точности представления передаваемого параметра.
- повторяющиеся поля, используемые в сообщениях RSIM#1, #22, #23, и которые отсутствуют в формате NMEA. Эта особенность RSIM сообщения означает, что число полей не определяется из типа сообщения, указанного в [6].
- контрольная сумма, обязательная для RSIM сообщений. Правило ее формирования приведено в [4] (пункт 5.2.3).
- особенности интерфейса аппаратных средств передачи данных, специальные требования к которым, как в формате NMEA, не предъявляются [12]. Например, не требуется использование EIA-422 [13], а скорость передачи данных 4800 бод не считается неотъемлемой особенностью оборудования для совместимости с рекомендуемым стандартом [2].
- числа с плавающей запятой, для которых нуль, в противоположность пробелам, требуется до и после десятичных запятых (например, "0.25" а не ".25", "15.0" а не "15."). Это является обязательным требованием в отличие от [6] (таблица 6).
- пустые поля, которые должны быть отделены запятой в начале и в конце, за исключением последнего поля данных, которое отделено звездочкой (*).
- группирование сообщений RSIM, в которых передаются данные для групп из трех спутников одновременно {RSIM#7, # 13, #19}, а последнее сообщение может содержать данные для одного или двух спутников. Например, если данные пересылались для восьми спутников, последнее сообщение группы будет содержать данные для двух спутников и пустое поле.
4.3 Порядок работы
4.3.1 Обмен сообщениями между КС и ОС
В этом примере контрольная станция запрашивает параметры линии передачи данных, отправляя сообщение RSIM#1 и запрашивая RSIM#10.
Это сообщение выглядит так: ($PRCM,1,10,1,,,*0D<CR><LF>). После того как ОС отослала запрошенное сообщение, КС обрабатывает данные. Если КС требуется произвести перезапуск ОС, то она посылает сообщение RSIM#3.
Перезапуск ОС приводит к запуску программы самотестирования и посылке ответного сообщения RSIM#5 с результатами теста.
4.3.2 Условия нормального функционирования
В течение работы КС периодически будет получать отчеты о состоянии оборудования, управляемого КС. Типичный набор RSIM сообщений, который может использоваться для этого, состоит из RSIM#15 и RSIM#18. Например, два сообщения могут приниматься каждые две минуты, с некоторым сдвигом во времени относительно друг друга. Сообщение RSIM#1 может быть использовано для установки интервала отчетности и времени старта для каждого сообщения в зависимости от производительности применяемых линий передачи данных.
4.3.3 Режим получения сигнала тревоги
Когда КС получает сообщение тревоги, свидетельствующее об аномальной работе системы, нужно получить всю информацию об объекте, чтобы определить подходящие корректирующие действия в кратчайший период времени. Оператор может запросить несколько типов данных, ответ на которые может содержаться в виде совокупности RSIM сообщений для быстрейшего получения различных параметров.
4.4 Руководство по применению RSIM сообщений
Ниже приведены следующие источники дополнительной информации, которые могут использоваться при разработке аппаратуры дифференциальной подсистемы:
- номера спутников. Для спутников GPS выделены номера от 1 до 32, а для спутников ГЛОНАСС и ГАЛИЛЕО - номера от 65 до 96.
- состояние спутника. Состояние (работоспособность) спутника GPS отображается в первом подкадре навигационного сообщения для спутников, которые находятся в зоне видимости. Оно может отличаться от значений в подкадрах четыре и пять для других спутников, указанных в [7].
- состояние спутника ГЛОНАСС отображается в слове Bn эффемеридной информации и слове Cn альманаха данных, указанных в [8].
- состояние спутника ГАЛИЛЕО отображается в данных, указанных в [9], [10].
Стандарт [5] (пункт 3.2.6) описывает оценку технического состояния спутника. Дифференциальная подсистема имеет возможность самостоятельно, независимо от наземного комплекса управления орбитальной группировкой, оценивать состояние спутника и передавать его потребителям в сообщениях RTCM#5, 33.
Состояние спутников в дифференциальной подсистеме назначается сообщением RSIM#8. Более подробную информацию о состоянии спутников можно получить с помощью сообщений RSIM#7 и #9. Сообщение RSIM#7 отображает состояние спутника из навигационного (бортового) сообщения.
Информация о нарушениях в работе отдельных спутников может быть замечена опорной станцией при выработке значений поправок к псевдодальности или скорости изменения псевдодальности и отражена в сообщении RSIM#12. Проблемные спутники могут быть обнаружены станцией интегрального контроля по величинам остаточных погрешностей измерений псевдодальности и скорости ее изменения, которые не скомпенсированы поправками.
Информацию об этом можно получить из сообщений RSIM#17, # 19 и #20.
СИК должна непрерывно контролировать передаваемые поправки для каждого видимого спутника с помощью RTCM сообщений 1 или 9 типа, независимо от информации в поле о состоянии эфемерид спутника.
Только сообщение RSIM#8 может объявить спутник неработоспособным.
В RSIM сообщениях указывается универсальное координированное время, за исключением случая работы ККС только по спутникам ГЛОНАСС. В этом случае используется шкала UTC (SU).
- распределение времени передач сообщений.
Установка интервалов для выдачи RSIM сообщений, архивирования данных и планирования передач сообщений RTCM должна соответствовать возможностям используемого оборудования.
5 Определения RSIM сообщений
Названия сообщений RSIM приведены в таблице 1.
Таблица 1 - Типы RSIM сообщений
RSIM # | Название |
1 | Запрос RSIM # сообщений/установка интервалов |
2 | Тревога при получении неопознанного сообщения |
3 | Команды управления |
4 | Управление архивированием данных |
5 | Отчет диагностики |
6 | Параметры приемника спутниковых сигналов |
7 | Параметры спутников |
8 | Управление состоянием спутников |
9 | Состояние спутников GPS |
10 | Параметры канала передачи данных ОС |
11 | Пороги срабатывания тревог ОС |
12 | Сигналы тревог ОС |
13 | Корректирующая информация ОС |
14 | Параметры приемника корректирующей информации СИК |
15 | Состояние канала приема СИК |
16 | Пороги/интервалы для сигналов тревог СИК |
17 | Сигналы тревог СИК |
18 | Основные результаты интегрального контроля |
19 | Подробные результаты |
20 | Системная обратная связь СИК |
21 | Параметры альманаха радиомаяков |
22 | Расписание передач RTCM сообщений |
23 | Универсальное RTCM сообщение |
24 | Состояние радиомаяка (РМк) и управление |
25 | Состояние радиопередающего оборудования |
26 | Обобщенное текстовое сообщение ASCII |
27 | Параметры оборудования удаленной станции |
51 | Состояние спутников ГЛОНАСС |
52 | Режимы работы |
53 | Расхождение шкал времени |
54 | Эфемеридные данные (перспективные) |
55 | Возраст поправок для разных систем |
Основные отличия от [2]
В сообщениях, содержащих информацию о спутниках, наряду с номерами спутников GPS (1-32) могут передаваться номера спутников ГЛОНАСС (65-96). В RSIM#3 добавлен символ H (hard), обозначающий аппаратный перезапуск приемника. В отчетных сообщениях с повторяющимися полями (RSIM#7, 13, 19) общее количество передаваемых групп может быть больше четырех. В самом общем случае - "n" групп, где n - целое число без десятичной точки. Некоторые отличия выделены полужирным курсивом*. Перечисленные дополнения не нарушают совместимости разнотипного оборудования по стандарту [6].
_______________
* В бумажном оригинале обозначения и номера стандартов приводятся обычным шрифтом. - .
5.1 Сообщение RSIM#1. Запрос и установка интервалов передачи
Применение
КС посылает на ОС или СИК запрос конкретного RSIM сообщения или для установки интервала выдачи RSIM сообщения. ОС или СИК в ответ на запрос посылает на КС сообщение RSIM#1 в соответствии с текущими установками.

где
1 - тип запрашиваемого RSIM сообщения.
2 - порт назначения.
ОС | СИК | |
Передатчик | ||
1 - КС | 1 - КС | 1 - КС |
2 - Регистратор данных | 2 - Регистратор данных | |
3 - резерв | 3 - ОС |
3 - активность сообщения 0=Выкл, 1=Вкл.
4 - интервал выдачи.
5 - время старта.
6 - дополнительные типы сообщений, порт назначения, активность, интервал, время старта (если требуются).
Примечания
1 КС может однократно запросить сообщение определенного типа, указывая номер RSIM-сообщения и порт назначения и оставляя поля 3-5 пустыми. Это позволит получить желаемый ответ, но не изменит установок по выдаче сообщения.
2 Установка интервала в 0 значение означает, что RSIM сообщение будет передаваться каждый раз при поступлении новых данных. Вследствие этого, для получения сообщений только по изменению статуса тревоги, установить активность равную 1 и нулевой интервал.
3 "Время старта" позволяет вводить смещение во времени передачи для различных типов сообщений и осуществлять обмен данными, избегая конфликтных ситуаций в низкоскоростных линиях передачи данных внутри системы. Первая посылка установленного в расписании RSIM сообщения ОС или СИК должна осуществляться через время смещения, установленного для этого сообщения, с момента приема RSIM#1.
4 Для получения значений заданных установок по выдаче сообщений КС посылает RSIM#1 с запросом ответа; ОС или СИК реагируют посылкой одной последовательности полей 1-5 для каждого типа с включенной на момент запроса активностью.
5 КС может устанавливать отчетный интервал для RSIM#23 с целью получения от ОС или СИК содержимого основных полей посылаемых RTCM сообщений в десятичной системе счисления. Когда активизировано сообщение тревоги (включая RSIM#20) с установленным интервалом, изменение статуса тревоги будет приводить к немедленной передаче сигнала тревоги независимо от заданного интервала.
6 Для получения конкретных типов RTCM сообщений существуют два метода, которые могут быть использованы с RSIM#23. Если выходной интервал в поле 4 установлен в ненулевое значение, тогда будут посылаться по одному сообщению RSIM#23 для всех типов RTCM сообщений, переданных в эфир последними. Если выходной интервал установлен в 0, то RSIM#23 будет выдаваться для каждого нового переданного RTCM сообщения. Этот метод может быть использован для проверки расписания RTCM передач.
5.2 Сообщение RSIM#2. Тревога при приеме неопознанного сообщения
Применение
Опорная станция или СИК посылает на КС данное сообщение обычно при сбоях в канале передачи данных системы или поступлении сообщения, которого нет в списке допустимых.
где
1 - время UTC возникновения данной тревоги
2 - поступившее нераспознанное RSIM# сообщение.
Примечания
1 Этим сообщением передаются любые сообщения, полученные без заголовка $PRCM, с недопустимым номером RSIM, нарушением формата.
2 Ничего не предпринимается по отношению к ошибочным сообщениям, включая сообщения с ошибочной контрольной суммой, кроме генерации данного сообщения.
3 $PRCM сообщения с ошибками тип/размерность данных будут прерываться, и вызывать формирование сообщения RSIM# 2.
5.3 Сообщение RSIM#3. Управляющие команды
Применение
Контрольная станция посылает это сообщение для выполнения различных переустановок параметров в опорной станции или СИК.
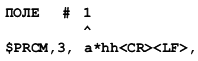
где 1 - команда перезапуска:
D - перезапуск вычислений дифференциальной подсистемы;
P - частичная переустановка;
F - полная переустановка;
H - аппаратный перезапуск.
Примечания
1 Перезапуск вычислений не должен приводить к переустановке петель слежения приемника, начальные установки, введенные оператором, должны сохраняться.
2 Частичная переустановка предполагает очистку оперативной памяти спутникового приемника с сохранением данных, введенных оператором, и данных альманаха спутников.
3 Полная переустановка приводит к очистке всей памяти, после чего требуется ввод оператором начальных установок приемника и прием альманаха. Настройки портов ввода-вывода должны сохраняться.
4 Частичный/полный сброс приводит к выполнению процедуры самотестирования. Блок приемника будет передавать сообщение диагностики RSIM#5 с результатами тестирования.
5 Аппаратный перезапуск осуществляется при "зависании" процессора приемника, например, с помощью внешнего контроллера. Начальные установки, введенные оператором, должны сохраняться.
5.4 Сообщение RSIM#4. Управление архивированием данных сообщения
Применение
Контрольная станция использует сообщение для управления передачей данных от опорной станции или СИК на порт регистратора данных. Формат помещаемых в архив данных не определяется сообщением RSIM#4. Приемлемым считается любой формат, который обеспечивает компактное хранение информации. ОС и СИК посылают сообщение в ответ на запросы КС.
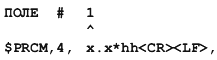
где 1 - интервал архивирования.
Примечание - Интервал архивирования определяет интервалы регистрации данных в секундах. Если интервал пустой, то данные не помещаются в архив. Если интервал нулевой, то все данные для архивирования должны быть выведены.
5.5 Сообщение RSIM#5. Отчет о диагностике
Применение
Опорная станция и СИК используют сообщение для представления состояния системы, определенного изготовителем и представленного в [11]. Это сообщение может быть инициировано ОС или СИК при обнаружении аномального состояния оборудования.
Кроме того, сообщение используется для передачи результатов самотестирования (в ответ на RSIM#3).
Если у ОС или СИК запрошено это сообщение, то обычным ответом будет "NORMAL" (большими буквами), пока не возникнет сбойная ситуация [11].

где
1 - время тревоги (UTC);
2 - текст диагностики:
- <256 символов - в кодах ASCII;
- "NORMAL" - неисправностей не обнаружено;
- должна быть определена любая другая кроме "NORMAL".
Примечание - Сообщения, отличные от "NORMAL", используются в соответствии с конкретной аппаратурой и технической политикой владельца дифференциальной службы. При нескольких ошибках в работе посылаются несколько сообщений.
5.6 Сообщение RSIM# 6. Параметры приемника GPS
Применение
Контрольная станция использует сообщение для обеспечения режима работы приемника на ОС или СИК. Опорная станция и СИК посылают в ответ на запросы контрольной станции.

где
1 - идентификатор опорной станции;
2 - опорный генератор (ОГ):
I - внутренний;
E - внешний;
3 - частота внешнего ОГ;
4 - координаты ОС или СИК - широта;
5 - северная (N) или южная (S);
6 - координаты ОС или СИК - долгота;
7 - западная (W) или восточная (E);
8 - высота фазового центра антенны приемника ОС (СИК ) над эллипсоидом;
9 - угол возвышения спутника над горизонтом;
10 - максимальный возраст RTCM поправок.
Примечания
1 Принятое станцией интегрального контроля поле идентификатора ОС используется для того, чтобы СИК контролировала передачи только определенной ОС. При получении RTCM сообщений от другой опорной станции, СИК по обратной связи (RSIM# 20) передает ее идентификационный номер на контролируемую опорную станцию, а ОС передает на КС сигнал тревоги.
2 RTCM поправки не могут быть применены в вычислении координат, если они старее, чем максимальный возраст, обозначенный в поле 10.
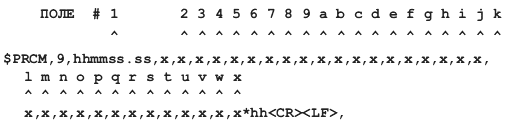
5.7 Сообщение RSIM# 7. Параметры спутников
Применение
Используется ОС или СИК для сообщения результатов наблюдения за спутниками GPS, ГАЛИЛЕО и ГЛОНАСС [7], [8], [9].

где
1 - общее число посылок (от 1 до n). В RTCM стандарте от 1 до 4;
2 - номер посылки;
3 - универсальное координированное время;
4 - номер спутника;
5 - азимут;
6 - угол возвышения;
7 - отношение сигнал/шум;
8 - точность определения дальности потребителя URA передается в навигационном сообщении спутника GPS, а En в навигационном сообщении спутника ГЛОНАСС;
9 - работоспособность спутника.
Примечания
1 Составное сообщение из нескольких посылок по три спутника в каждой. Поля 4-9 повторяющиеся.
2 Передается информация обо всех спутниках, находящихся на слежении независимо от их состояния, передаваемого в навигационном сообщении.
3 Азимут и возвышение соответствуют значениям, вычисленным в приемнике. Если спутник должен быть выше минимального угла возвышения (на основе вычислений на базе альманаха), но не находится на слежении, то отношение сигнал/шум передается как фиктивное (пустое).
4 Работоспособность спутника, сообщенная в эфемеридной информации.
5 Точность определения дальности потребителя определена в [7], En - в [8], раздел 4.
5.8 Сообщение RSIM#8. Контроль состояния спутников
Применение
Контрольная станция использует сообщение для управления работой опорной станции и СИК. Этот тип RSIM никогда не запрашивается.

где
1 - номер спутника:
99 - специальный код, сообщающий, что информация в поле 2 предназначена для всех спутников систем GPS, ГАЛИЛЕО и ГЛОНАСС.
2 - код контроля состояния (исправности) спутника:
0 - использовать принимаемый со спутника признак состояния;
1 - принудительно принять спутник как исправный;
2 - принудительно принять спутник как неисправный;
3 - потери универсального координированного времени со спутника.
Примечания
1 Для определения исправности спутника используется информация RSIM#7 или RSIM#9.
2 Время потери информации со спутника для использования передается опорной станцией в RTCM#5/33 в случае, если они применяются владельцем службы. Если предупреждение не посылается или оно не предусмотрено, то поле остается пустым.
5.9 Сообщение RSIM#9. Контроль состояния спутников GPS
Применение
Опорная станция или СИК посылают сообщение по запросу КС
где
1 - универсальное координированное время;
2 - статус спутника 1;
3 - статус спутника 2;
4 - статус спутников GPS с номерами от 3 до 32.
Состояние спутника:
0 - не находится на слежении;
1 - исправен/на слежении;
2 - неисправен/на слежении;
3 - принудительно исправен/неисправен по информации со спутника;
4 - принудительно исправен/исправен по информации со спутника;
5 - принудительно исправен/не находится на слежении;
6 - принудительно неисправен/исправен по информации со спутника;
7 - принудительно неисправен/неисправен по информации со спутника;
8 - принудительно неисправен/не находится на слежении;
9 - признак исправен/неисправен не определен/на слежении.
Примечания
1 Состояния 0,1,2 показывают пригодность спутника, определяемую на основании данных, передаваемых с конкретного спутника.
2 Состояния 6 и 7 поддерживаются только для опорной станции.
5.10 Сообщение RSIM#10. Параметры канала передачи данных опорной станции
Применение
Контрольная станция использует сообщение для установки параметров, которые определяют режим работы опорной станции при передаче корректирующей информации по радиомаячному каналу. На запросы этого сообщения ОС использует для ответа.

где
1 - канал;
2 - частота;
3 - режим работы:
- 0 - нормальный дифференциальный режим;
- 1 - передача чередующихся 1 и 0;
- 2 - только несущая частота;
- 3 - нет сигнала;
4 - скорость передачи данных в эфир;
5 - тип модуляции:
- 0 - MSK;
- 1 - FSK;
- 2 - передача идентификационной информации кодом Морзе для пеленгования;
- 3 - нет модуляции;
6 - тип синхронизации:
- 0 - синхронная передача;
- 1 - асинхронная передача;
7 - кодирование передачи:
- 0 - нет кодирования;
- 1 - применяется дополнительное помехоустойчивое кодирование;
8 - идентификатор радиомаяка.
Примечания
1 Стандарт передачи данных поставщика услуг будет определять, какие поля необходимы в данном случае.
2 Допускается, что мощность радиопередач не регулируется с помощью модулятора опорной станции, а частота регулируется.
3 Информация этого сообщения не предназначена для формирования RTCM#7/35, содержащих альманах радиомаяков. Необходимую для этого информацию несет RSIM#21.
4 Поля 1 и 8 обеспечивают возможность использования двухканального модулятора для формирования идентификатора радиомаяка в коде Морзе и модуляции корректирующей информации.
5.11 Сообщение RSIM#11. Пороги срабатывания сигнала тревог ОС
Применение
Контрольная станция использует сообщение для установки порогов срабатывания сигналов тревог опорной станции. По запросу контрольной станции ОС использует для передачи применяемых параметров.

где
1 - минимальное число спутников на слежении;
2 - порог значения поправок псевдодальности (PRC);
3 - порог значения скорости изменения поправок псевдодальности (RRC);
4 - максимальное время ожидания обратной связи от СИК.
Примечания
1 При нарушении какого-либо порога, сигнал тревоги передается на КС с помощью RSIM#12.
2 Для системы ГНСС учитывается общее количество спутников GPS, ГАЛИЛЕО и ГЛОНАСС.
5.12 Сообщение RSIM#12. Сигналы тревог опорной станции
Применение
Опорная станция использует для передачи на контрольную станцию сигналов тревог, когда они возникают, прекращаются или по запросу

где
1 - время UTC;
2 - сигнал тревоги: недостаточное число спутников:
I - спутников недостаточно;
S - спутников достаточно, сброс тревоги;
3 - сигнал тревоги: опорная станция не контролируется:
F - опорная станция не контролируется, нет отклика от СИК;
W - опорная станция не контролируется, неверный идентификатор ОС;
U - опорная станция не контролируется, другая причина;
M - опорная станция контролируется, сброс тревоги;
4 - сигнал тревоги: превышение порогового значения поправки псевдодальности:
H - превышение;
N - превышения нет, сброс тревоги;
5 - сигнал тревоги: превышение порогового значения скорости изменения псевдодальности:
H - превышение;
N - превышения нет, сброс тревоги.
5.13 Сообщение RSIM#13. Корректирующая информация опорной станции
Применение
Опорная станция использует для передачи наиболее свежей корректирующей информации на момент формирования сообщения.

где
1 - общее число передаваемых посылок (1-n). В RTCM стандарте от 1до 4;
2 - номер посылки;
3 - время сообщения (UTC);
4 - номер спутника;
5 - поправка псевдодальности (PRC);
6 - скорость изменения псевдодальности (RRC);
7 - ускорение псевдодальности (PRA);
8 - дифференциальная ошибка потребителя (UDRE);
9 - RTCM модифицированный Z-отсчет;
a - возраст данных;
b - номер спутника;
c - поправка псевдодальности (PRC);
d - скорость изменения псевдодальности (RRC);
e - ускорение псевдодальности (PRA);
f - дифференциальная ошибка потребителя (UDRE);
g - RTCM модифицированный Z-отсчет;
h - возраст данных;
i - номер спутника;
j - поправка псевдодальности (PRC);
k - скорость изменения псевдодальности (RRC);
l - ускорение псевдодальности (PRA);
m - дифференциальная ошибка потребителя (UDRE);
n - RTCM модифицированный Z-отсчет;
o - возраст данных.
Примечание - Составное сообщение из нескольких посылок, по 3 спутника в посылке.
5.14 Сообщение RSIM#14. Параметры приемника корректирующей информации станции интегрального контроля
Применение
Контрольная станция использует сообщение для установки параметров СИК, которые определяют режим работы приемника корректирующей информации. По запросу контрольной станции СИК использует для сообщения режима работы ПКИ.

где
1 - контролируемая частота приемника;
2 - скорость передачи, бит/сек;
3 - режим модуляции:
- 0 - MSK;
- 1 - FSK;
4 - тип синхронизации:
- 0 - синхронный прием;
- 1 - асинхронный прием;
5 - кодирование принимаемых данных:
- 0 - нет дополнительного кодирования;
- 1 - применяется дополнительное помехоустойчивое кодирование.
5.15 Сообщение RSIM#15. Состояние канала приема корректирующей информации
Применение
СИК использует сообщение для передачи усредненных измерений на интервалах наблюдения.

где
1 - универсальное координированное время;
2 - уровень сигнала;
3 - отношение сигнал/шум;
4 - относительное число ошибочных сообщений;
5 - средний возраст поправок.
Примечания
1 Используемые интервалы времени наблюдения определены в RSIM#16 (поля 3, 5, 7, k).
2 Средний возраст поправок рассчитывается по всем принимаемым поправкам.
5.16 Сообщение RSIM#16. Пороги/интервалы для сигналов тревог СИК
Применение
КС использует сообщение для установки порогов и интервалов сигнала тревоги СИК. По запросу КС СИК использует для передачи данных о используемых порогах и интервалах сигналов тревоги.
где
1 - порог возраста RTCM поправок;
2 - порог относительного количества ошибочных сообщений;
3 - интервал наблюдения количества ошибочных сообщений;
4 - порог отношения сигнал/шум приемника поправок;
5 - интервал наблюдения отношения сигнал/шум приемника поправок;
6 - порог уровня сигнала приемника поправок;
7 - интервал наблюдения уровня сигнала приемника поправок;
8 - порог количества отслеживаемых спутников;
9 - интервал наблюдения количества отслеживаемых спутников;
a - порог горизонтального геометрического фактора ухудшения точности;
b - интервал наблюдения HDOP;
c - порог отклонения местоположения от эталонных координат по горизонтали;
d - интервал наблюдения отклонения местоположения по горизонтали;
e - порог остаточных значений погрешности псевдодальности;
f - интервал наблюдения остаточных значений погрешности псевдодальности;
g - порог остаточных значений погрешности псевдоскорости;
h - интервал наблюдения остаточных значений погрешности псевдоскорости;
i - порог тревоги "низкая дифференциальная точность потребителя (UDRE)";
j - интервал наблюдения тревоги "низкая дифференциальная точность потребителя";
k - интервал наблюдения возраста поправок.
Примечания
1 Обычно аномальная ситуация должна просуществовать некоторое время для генерации сигнала тревоги. Исключениями из этого правила являются пороги полей 1 и 2, когда эти пороги превышаются, немедленно посылается сигнал тревоги. Если любой из интервалов равен нулю, нарушение порога будет немедленно инициировать тревогу.
2 Интервалы наблюдения, определенные здесь, используются также для нормальной работы (без сигнала тревоги) (RSIM#15).
3 Поля 3 и k не используются в определении сигнала тревоги, а используются только для определения временного окна, в течение которого выполняется усреднение для передачи значений возраста поправок и относительного количества ошибочных сообщений в RSIM#15.
5.17 Сообщение RSIM#17. Сигналы тревог СИК
Применение
Станция интегрального контроля использует сообщение для передачи на КС оповещений о тревогах, когда они возникают, прекращаются или запрашиваются.

где
1 - универсальное координированное время тревоги;
2 - идентификатор опорной станции;
3 - сигнал тревоги возраста RTCM поправок:
- H - большой возраст RTCM поправок, сигнал тревоги;
- A - приемлемый возраст поправок, сброс сигнала тревоги;
4 - сигнал тревоги: большое значение относительного числа ошибочных сообщений:
- H - большое число ошибочных сообщений, сигнал тревоги;
- A - приемлемое число ошибочных сообщений, сброс сигнала тревоги;
5 - отношение сигнал/шум в канале приема корректирующей информации:
- L - низкое отношение сигнал/шум, включается сигнал тревоги;
- A - приемлемое отношение сигнал/шум, сброс сигнала тревоги;
6 - сигнал тревоги: низкий уровень сигнала в канале приема корректирующей информации:
- Z - нет сигнала;
- L - низкий уровень сигнала сигнал тревоги;
- A - приемлемый уровень сигнала, сброс сигнала тревоги;
7 - сигнал тревоги: недостаточное число спутников на слежении:
- Z - ни одного спутника на слежении;
- L - недостаточное число спутников на слежении сигнал тревоги;
- A - приемлемое число спутников на слежении;
8 - сигнал тревоги: большое значение геометрического фактора ухудшения точности:
- H - большое значение HDOP, сигнал тревоги;
- A - приемлемое значение HDOP, сброс сигнала тревоги;
9 - сигнал тревоги: большое значение горизонтальной ошибки определения местоположения:
- H - большое значение ошибки, сигнал тревоги;
- A - приемлемое значение ошибки, сброс сигнала тревоги;
a - сигнал тревоги: большое значение остаточной погрешности псевдодальности:
- H - большое значение остаточной погрешности псевдодальности, сигнал тревоги;
- A - приемлемое значение погрешности, сброс сигнала тревоги;
b - сигнал тревоги: большое значение остаточной погрешности псевдоскорости:
- H - большое значение погрешности, сигнал тревоги;
- A - приемлемое значение погрешности, сброс сигнала тревоги;
с - сигнал тревоги: низкая дифференциальная точность потребителя (UDRE):
- L - низкая точность, сигнал тревоги;
- A - приемлемая точность, сброс сигнала тревоги.
Примечания
1 Если идентификационный номер ОС на контролируемой частоте изменится, то сообщение RSIM#17 будет передаваться на контрольную станцию с новым идентификатором станции.
2 При возникновении тревоги RSIM#17 должно быть послано только с полем конкретной тревоги, а не сообщать статус всех источников тревог.
5.18 Сообщение RSIM#18. Результаты интегрального контроля DGPS
Применение
Станция интегрального контроля формирует данные для составления кратких сообщений на КС с целью отображения основных результатов непрерывного контроля дифференциального режима.

где
1 - универсальное координированное время обсервации;
2 - ошибка широты;
3 - ошибка долготы;
4 - ошибка высоты;
5 - число спутников, использованных для расчета координат;
6 - PDOP;
7 - HDOP;
8 - VDOP.
Примечания
1 Это короткое сообщение, предназначенное для обеспечения обратной связи с КС, как правило, используется в сочетании с RSIM#15.
2 Все значения являются мгновенными, не усредненными измерениями. DOP определяется по спутникам, которые используются в определении местоположения.
3 Число спутников может сравниваться с ожидаемым числом на КС. Если совпадения нет, то более полную информацию о видимых спутниках можно получить с помощью RSIM#19.
5.19 Сообщение RSIM#19. Подробные результаты интегрального контроля
Применение
Станция интегрального контроля использует сообщение для передачи на КС мгновенных значений подробной информации интегрального контроля.

где
1 - общее число передаваемых посылок (1-n). В RTCM стандарте от 1 до 4;
2 - номер посылки;
3 - универсальное координированное время;
4 - номер спутника;
5 - остаточная погрешность псевдодальности;
6 - остаточная погрешность псевдоскорости;
7 - показатель качества коррекции;
8 - оценка дисперсии псевдодальности;
9 - возраст поправок.
Примечания
1 Составное сообщение из нескольких посылок, по 3 спутника в каждой. Поля 4-9 повторяющиеся.
2 Возраст - это разность между модифицированным Z-отсчетом поправки и временем спутниковой системы на момент приема RTCM сообщения станцией интегрального контроля.
3 Установка интервала выдачи этого RSIM сообщения в нулевое значение с помощью RSIM#1 будет вызывать его формирование каждый раз при получении нового RTCM#1/31 или #9/34.
4 Если ОС формирует поправку для спутника, который временно блокирован на СИК, то поля, предназначенные для остаточных погрешностей будут передаваться пустыми. В это сообщение включаются данные только о тех спутниках, углы возвышения которых превосходят значение, заданное в сообщении RSIM#6.
5.20 Сообщение RSIM#20. Системная обратная связь СИК
Применение
Станция интегрального контроля использует сообщение для обеспечения обратной связи с ОС для независимого подтверждения точностных характеристик системы.
где
1 - идентификатор (номер) опорной станции;
2 - флаг местоположения:
- 0 - отклонение местоположения от эталона в заданных пределах;
- 1 - пределы отклонения местоположения превышены;
- 2 - передача не контролируется;
3 - флаг остаточной погрешности псевдодальности:
- 0 - все остаточные погрешности в заданных пределах;
- 1,...32, 65,...96 - номер спутника, для которого остаточная погрешность превысила пределы.
Примечания
1 Идентификатор ОС определяется из радиопередач по каналу связи. Это дает возможность ОС знать, действительно ли ее собственные поправки проверяются станцией интегрального контроля.
2 Представлена информация об отдельной ошибке псевдодальности, что побуждает опорную станцию к выполнению корректирующих действий. Одновременно может быть передана информация об ошибке псевдодальности только для одного спутника.
3 Корректирующие воздействия ОС могут заключаться в прекращении использования этого спутника или перезапуске контуров слежения спутникового приемника.
4 Если рассчитанные координаты местоположения превышают порог, установленный в сообщении RSIM#16, появится флаг погрешности местоположения, и опорная станция выполнит корректирующие действия в работе в соответствии с политикой поставщика услуг дифференциальной службы.
5 Если опорная станция не получила это сообщение до момента превышения порога времени, определенного RSIM#11, то ОС должна передать сигнал тревоги на контрольную станцию, используя RSIM#12, и в соответствующем поле второго слова RTCM создать сообщение "Неконтролируемая радиопередача" (код состояния ОС-110).
6 В условиях высокого значения горизонтального геометрического фактора ухудшения точности (HDOP) на СИК это сообщение обратной связи будет передаваться с флагом "погрешность местоположения", обозначающим "Неконтролируемая передача". Сообщение RSIM#20 никогда не должно содержать пустых полей.
5.21 Сообщение RSIM#21. Параметры альманаха радиомаяков
Применение
Контрольная станция посылает сообщение на ОС, чтобы создать информацию о альманахе радиомаяков, которая хранится на ОС. Установка этих параметров не влияет на функциональное действие аппаратуры; оно предназначено для передачи информации пользователю в сообщениях RTCM#7/35. В ответ на запрос с контрольной станции ОС посылает данное сообщение. Это сообщение может быть составным и отражать текущее состояние.
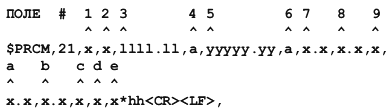
где
1 - общее число посылок (от 1 до 4);
2 - номер посылки;
3 - широта;
4 - северная (N) или южная (S);
5 - долгота;
6 - западная (W) или восточная (E);
7 - дальность действия радиомаяка;
8 - частота;
9 - состояние:
- 0 - штатное функционирование;
- 1 - работа не контролируется;
- 2 - нет данных о состоянии;
- 3 - запрет использования данного радиомаяка;
a - идентификатор ОС;
b - скорость передачи;
с - тип модуляции:
- 0 - MSK;
- 1 - FSK;
d - тип синхронизации:
- 0 - синхронная передача;
- 1 - асинхронная передача;
e - дополнительное кодирование:
- 0 - не применяется;
- 1 - применяется.
Примечания
1 Широта/долгота - координаты радиомаяка.
2 ОС рекомендуется передавать данное сообщение, чтобы информировать потребителей о эксплуатационной дальности передачи поправок.
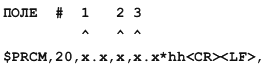
5.22 Сообщение RSIM#22. Расписание RTCM радиопередач
Применение
КС посылает сообщение на ОС с целью планирования расписания передачи RTCM сообщений. ОС посылает сообщение в ответ на запрос КС. ОС будет сообщать о всех типах используемых сообщений и интервалах их передачи.
где
1 - метод формирования поправок:
- 1 - RTCM#1 (RTCM#31 для ГЛОНАСС);
- 2 - RTCM#9 (RTCM#34 для ГЛОНАСС) группами по 3 спутника;
- 3 - RTCM#9 (RTCM#34 для ГЛОНАСС) для каждого спутника;
2 - тип RTCM сообщения;
3 - интервал передачи;
4 - время старта (устанавливает временной сдвиг между началом выдачи сообщений разного типа);
5 - дополнительные типы RTCM сообщений, если требуется (поля 2-4).
Примечания
1 На опорной станции одно сообщение RTCM# должно быть задано с интервалом 0; ОС будет передавать этот тип сообщения непрерывно всякий раз, когда нет других. Это не противоречит методу формирования поправок, которые последовательно посылаются до тех пор, пока отличный от нуля интервал не будет в поле 3.
2 Если поле интервала пустое, то RTCM# не должно передаваться.
3 Планирование сообщений RTCM#5 осуществляется в соответствии с RSIM#8 и возможностями оборудования поставщика услуг. Сообщение переменной длины.
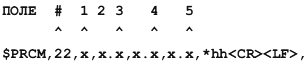
5.23 Сообщение RSIM#23. Универсальное сообщение RTCM
Применение
Контрольная станция использует сообщение для пересылки сообщения RTCM#16 на ОС для передачи. СИК использует сообщение для извещения о приеме RTCM сообщений включением всех основных полей RTCM сообщения в соответствующие поля RSIM. Это относится к RTCM# 3, 5, 7, 16, 32, 33, 35, 36. ОС использует сообщение для преобразования получаемых от КС данных в формат RTCM, если это требуется.

где
1 - универсальное координированное время;
2 - номер RTCM сообщения, которое требуется передать;
3 - идентификатор ОС;
4 - RTCM Z-отсчет;
5 - RTCM номер последовательности;
6 - длина (число слов) RTCM сообщения;
7 - состояние ОС в RTCM сообщении:
- 0-5 - определяются владельцем дифференциального оборудования;
- 6 - неконтролируемая радиопередача;
- 7 - неработоспособность ОС;
8 - слово RTCM;
9 - дополнительные слова RTCM, если требуется.
Примечания
1 КС посылает информацию на ОС, например: информацию для основных полей RTCM в полях 1-7 RSIM, оставляя поля, заполняемые на ОС, пустыми. Текст для RTCM сообщения передается в виде последовательности десятичных RTCM слов без проверки четности. Каждое повторение RSIM поля 8 должно быть преобразовано в двоичные значения 24-битовых RTCM данных, а затем для каждого слова на опорной станции должна быть добавлена четность.
2 КС может послать время UTC в десятичном виде, ОС преобразовывает в двоичный код для передачи в виде модифицированного Z-отсчета. Более того, КС может оставить поле времени UTC пустым, а опорная станция будет назначать Z-отсчет при передаче RTCM сообщения в радиолинию.
3 При посылке сообщения от СИК на КС двоичные поля RTCM сообщения преобразуются (СИК) в десятичные значения с числом значащих разрядов, обеспечивающих точность представления передаваемых параметров.
4 RTCM#16, посылаемое КС, будет передано опорной станцией однократно, если сообщение RSIM#22 не предписывает периодическую передачу данных.
5.24 Сообщение RSIM#24. Управление радиомаяком и контроль его состояния
Применение
Контрольная станция посылает сообщение на РМК для переключения полукомплектов. РМК посылает на КС по запросу сообщение RSIM#1. РМК посылает сообщение на КС до и после, выполнения переключения полукомплектов или при изменении мощности независимо от того, было это изменение автоматическое или принудительное. КС посылает сообщение на радиомаяк для выполнения полного перезапуска радиомаяка.

где
1 - полукомплект (А/В);
2 - перезапуск процессора РМК;
3 - автоматическое переключение полукомплектов (вкл/выкл);
4 - выходная мощность передатчика;
5 - излучаемая мощность;
6 - мощность источника питания;
7 - напряжение источника питания (постоянного тока);
8 - ток источника питания (постоянного тока);
9 - ток заряда батареи.
Примечания
1 Сообщение посылается на КС, когда используемый полукомплект переключается при любых обстоятельствах. В этом случае RSIM#24 посылается немедленно перед переключением полукомплекта, а за этим немедленно следует RSIM#24 со значениями параметров после переключения.
2 Сообщение посылается на КС, когда происходит переключение источника питания с переменного тока на постоянный и наоборот независимо от того, если это случилось в результате изменения с помощью команды управления (например, через RSIM#1) или с помощью автоматики источника питания.
3 Чтобы переключить полукомплект, RSIM#24 посылается только с полем 1.
4 Напряжение и сила тока обеспечиваются источником питания постоянного тока.
5.25 Сообщение RSIM#25. Управление и отображение состояния радиопередающего оборудования
Применение
Сообщение посылается КС на РМК для изменения параметров комплекта радиопередающего оборудования. Состояние элементов оборудования, включая датчики внешней среды, могут быть переданы этим типом сообщения. Ответное сообщение должно формироваться по запросу, установленному расписанию, или при изменении состояния.
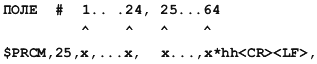
где
01 - 24 - управление параметром:
- 0 - низкое значение;
- 1 - высокое значение;
25-64 - наблюдение параметра:
- 0 - низкое значение;
- 1 - высокое значение.
Примечание - Когда сообщение посылается КС, поля управления параметром будут использованы для изменения параметра. Поля наблюдаемых параметров отправляться не будут.
5.26 Сообщение RSIM#26. Обобщенное текстовое ASCII-сообщение
Применение
Посылается любым устройством в целях формирования сообщения в символах ASCII [11]. Поле времени включается в каждую текстовую строку.
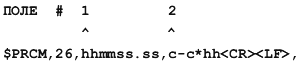
где
1 - универсальное координированное время, относящееся к соответствующему текстовому полю.
2 - строка в символах ASCII (<256 символов).
Примечание - Поле универсального координированного времени должно быть установлено в 0, если за ним нет строк.
5.27 Сообщение RSIM#27. Структурные параметры удаленной станции
Применение
Сообщение посылается любым устройством для передачи серийного номера и версии(ий) фирменных аппаратных средств для оборудования удаленной станции, таких как опорная станция, СИК или радиомаяк.

где
1 - серийный номер устройства;
2 - фирменный программный модуль #1;
3 - фирменный программный модуль #2;
4 - фирменный программный модуль #3.
Примечание - Каждое устройство может иметь не более трех резидентных фирменных аппаратных модуля.
5.28 Сообщение RSIM#51. Состояние спутников ГЛОНАСС
Применение
По запросу контрольная станция, опорная станция или СИК посылают сообщение.
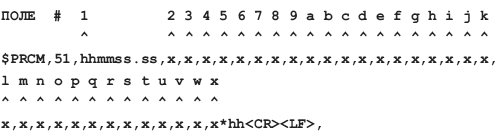
где
1 - универсальное координированное время;
2 - статус спутника N 1;
3 - статус спутника N 2, от 4 до x - статус спутников с номерами от 3 до 32.
Состояние:
- 0 - не находится на слежении;
- 1 - работоспособен/на слежении;
- 2 - неработоспособен/на слежении;
- 3 - принудительно работоспособен/неработоспособен, информация со спутника;
- 4 - принудительно работоспособен/работоспособен, информация со спутника;
- 5 - принудительно работоспособен/не находится на слежении;
- 6 - принудительно неработоспособен/работоспособен, информация со спутника;
- 7 - принудительно неработоспособен/неработоспособен, информации со спутника;
- 8 - принудительно неработоспособен/не находится на слежении;
- 9 - работоспособность не определена/находится на слежении.
Примечание - Состояния 0,1,2 показывают пригодность спутника, определяемую на основании данных, передаваемых со спутника, о котором идет речь. Состояния 6 и 7 поддерживаются только для ОС.
5.29 Сообщение RSIM#52. Режим работы ОС, СИК
Применение
Используется для задания режима работы спутникового приемника.

где
1 - режим работы:
- 0 - GPS+ГЛОНАСС+ГАЛИЛЕО (ГНСС);
- 1 - GPS;
- 2 - ГЛОНАСС;
- 3 - ГАЛИЛЕО.
2 - система координат:
- 0 - WGS-84;
- 1 - ПЗ-90;
- 2 - резерв.
3 - поправка для перехода к местному времени в формате: Р(М)чч.мм,
где
- Р соответствует знаку "+";
- М соответствует знаку "-".
Примечание - Системное время - при режимах 0 и 1 - универсальное координированное время, при режиме 2 - универсальное координированное время России.
5.30 Сообщение RSIM#53. Расхождение шкал времени
Применение
Опорная станция или СИК передают сообщение по запросу КС.

где
1 - универсальное координированное время;
2 - отклонение шкалы времени GPS от шкалы приемника;
3 - отклонение шкалы времени ГЛОНАСС от шкалы приемника без учета сдвига на три часа между Гринвичем и московским зимним временем;
4 - разность времени GPS - UTC;
5 - разность времени ГЛОНАСС - UTC(SU);
6 - разность времени GPS - ГЛОНАСС.
Примечание - Разность времен передается в секундах как число с плавающей запятой.
5.31 Сообщение RSIM#54. Информация об эфемеридах (перспективная)
Применение
Контрольная станция запрашивает опорную станцию и СИК. Опорная станция и СИК отвечают на запрос.

где
1 - универсальное координированное время;
2 - номер спутника;
3 - IODE/Tb;
4 - Tk - для ГЛОНАСС, Toe - для GPS.
Примечания
1 Параметры, размещаемые в полях 3 и 4, описаны в интерфейсных контрольных документах спутниковых систем.
2 При запросе поля 1, 3, 4 - пустые. Код 99 во втором поле означает, что информация запрашивается по всем видимым спутникам, код 98 - по всем видимым спутникам ГЛОНАСС.
3 Если отчетное сообщение активизировано, то передается сразу после смены эфемерид спутника независимо от интервала, установленного в RSIM#1.
5.32 Сообщение RSIM#55. Индивидуальный возраст поправок

где
1 - универсальное координированное время;
2 - средний возраст поправок GPS;
3 - средний возраст поправок ГЛОНАСС.
Примечание - При работе более чем по одной системе это сообщение формируется наряду с RSIM#15.
6 Методы испытаний
6.1 Включение КС
6.1.1 Проверка работоспособности ОС под управлением КС
6.1.1.1 Включить системный блок и монитор КС (рисунок 1).
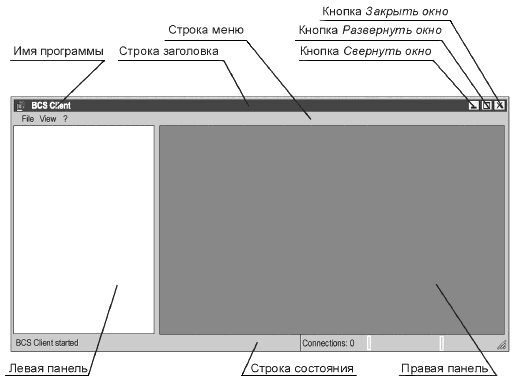
Рисунок 1
На КС после загрузки операционной системы Windows NT 4.0 загрузить программы:
- BCS Server - программа управления оборудованием ККС.
- BCS Client - программа, обеспечивающая интерфейс пользователя.
6.1.1.2 После включения КС на экране монитора проконтролировать индикацию стартового окна программы BCS Client (рисунок 1).
В строке состояния стартового окна программы BCS Client проконтролировать сообщение Connections: 0.
Примечание - Далее в тексте вместо выражения "левая панель окна программы BCS Client" и вместо выражения "правая панель окна программы BCS Client" будут использованы соответственно выражения "левая панель" и "правая панель" (рисунок 1).
6.1.1.3 После появления стартового окна программы BCS Client установить связь с программой управления оборудованием - BCS Server. Для установки связи программы, обеспечивающей интерфейс пользователя BCS Client с программой управления оборудованием - BCS Server выполнить действия:
- в строке меню щелкнуть на строке с надписью File4;
- в раскрывающемся списке (рисунок 2) щелкнуть на строке с надписью Connect to4;
- на правой панели окна контролировать диалоговое окно установки связи (рисунок 3). В диалоговом окне установки связи выделить строку с надписью Local и нажать кнопку ОК.
Рисунок 2
Примечание - На рисунке 3 строка с именем станции может отсутствовать.
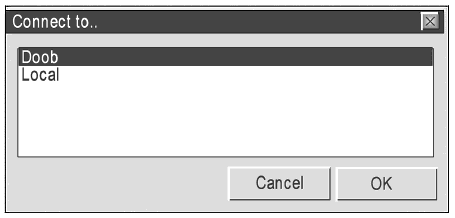
Рисунок 3
6.1.1.4 Контролировать установку связи с программой управления оборудованием - BCS Server согласно рисунку 4.
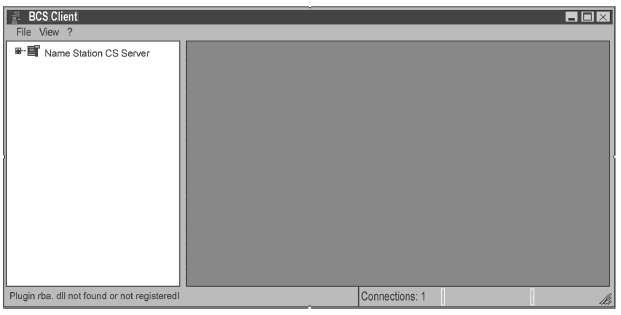
Рисунок 4
Для этого:
1 В строке состояния окна программы BCS Client проконтролировать сообщение Connections: 1.
2 На левой панели окна контролировать индикацию пиктограммы основного каталога структурных компонентов станции.
Справа от пиктограммы основного каталога структурных компонентов станции индицируется "наименование станции", с "сервером" которой установлено соединение.
Имя станции может быть произвольное.
Программа настоящего стандарта в качестве примера использует наименование Новороссийской станции "Doob", установленной на мысе Дооб.
6.1.1.5 Раскрыть основной каталог, для этого щелкнуть на кнопке "плюс" основного каталога. На левой панели контролировать индикацию структурных компонентов станции, показанных на рисунке 5.
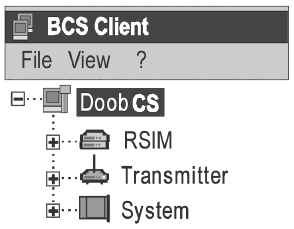
Рисунок 5
В состав станции входят три многоструктурные компоненты:
- RSIM - блоки опорных станций и блоки станций интегрального контроля,
- Transmitter - радиомаяк,
- System - системный блок компьютера КС.
Нажать RSIM. Контролировать на левой панели индикацию структурных компонентов станции, показанных на рисунке 6.
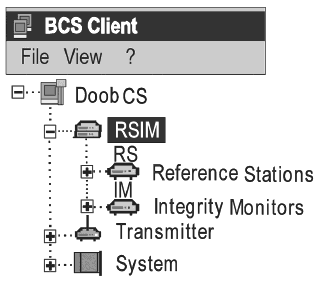
Рисунок 6
Компонент RSIM включает в себя блоки опорных станций и станций интегрального контроля:
- Reference Station - ОС, обозначается как RS.
- Integrity Monitor - СИК, обозначается как IM.
6.1.1.6 Нажать кнопку ОС. Контролировать на левой панели индикацию структурных компонентов станции согласно рисунку 7.
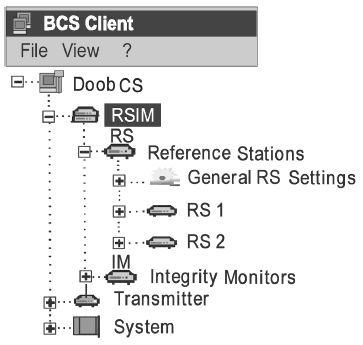
Рисунок 7
Компоненты RSIM/Reference Station включают в себя:
- общие установки и контроль для обеих ОС - General RS Settings;
- отдельные установки и контроль блока опорной станции под номером один, обозначается как RS 1;
- отдельные установки и контроль блока опорной станции под номером два, обозначается как RS 2.
6.1.1.7 Раскрыть общие установки ОС и установки ОС 1.
После раскрытия ОС 1, раскрыть Settings и View. Контролировать индикацию левой панели (рисунок 8).
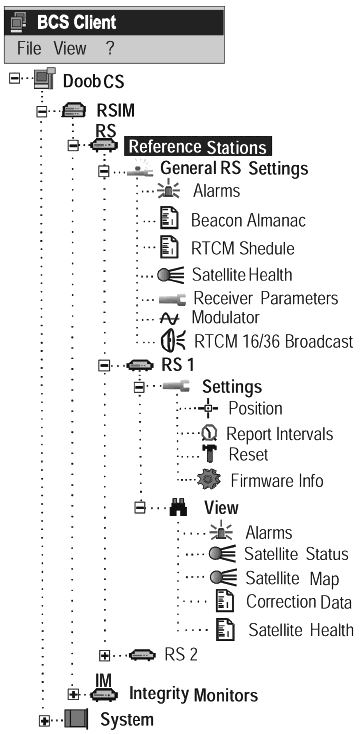
Рисунок 8
6.1.2 Установка значений порогов тревог для ОС (RSIM#11)
6.1.2.1 Установить на правую панель диалоговое окно общих установок ОС. Для этого на левой панели окна дважды щелкнуть левой кнопкой мыши на названии минимальной структурной единицы - Alarms.
На правой панели контролировать диалоговое окно установки общих параметров ОС с активной вкладкой Alarms (рисунок 9). В диалоговом окне Reference Station - General RS Settings с активной вкладкой Alarms контролировать значение порогов тревог ОС, показанных в таблице 2.
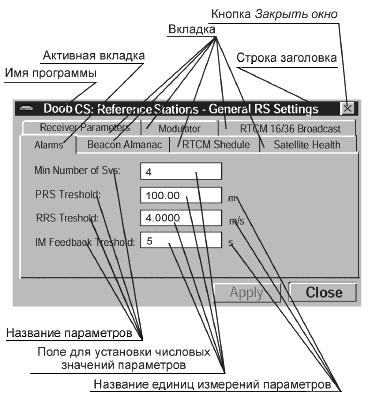
Рисунок 9
Таблица 2 - Значение порогов тревог ОС.
Название порогов тревог | Обозначение порогов тревог | Числовое значение порогов тревог |
Минимальное число спутников на слежении | Min Number of Svs | 5 |
Значение псевдодальности | PRC Treshold | 99.00 |
Значение скорости изменения псевдодальности | RRC Treshold | 3.9000 |
Время обратной связи от СИК (RSIM#20) | IM Feedback Treshold | 6 |
6.1.2.2 В диалоговом окне Reference Station - General RS Settings с активной вкладкой Alarms установить значение порогов тревог ОС, показанных в таблице 3.
Таблица 3 - Установка значений порогов тревог ОС
Название порогов тревог | Обозначение порогов тревог | Числовое значение порогов тревог |
Минимальное число спутников на слежении | Min Number of Svs | 4 |
Значение псевдодальности | PRC Treshold | 100.00 |
Значение скорости изменения псевдодальности | RRC Treshold | 4.0000 |
Время обратной связи от СИК | IM Feedback Treshold | 5 |
1 Для установки значений порогов тревог по минимальному количеству спутников, которые находятся на слежении, выполнить действия:
- подвести указатель на поле установки значений параметров перед названием Min Number of Svs и щелкнуть мышью;
- с клавиатуры ввести значение - 4;
- нажать кнопку Apply (Применить).
2 Для установки значений порогов тревог по значению псевдодальности выполнить действия:
- подвести указатель на поле установки значений параметров перед названием PRC Threshold и щелкнуть мышью;
- с клавиатуры ввести значение - 100.00;
- нажать кнопку Apply (Применить).
3 Для установки значений порогов тревог по значению скорости изменения псевдодальности выполнить действия:
- подвести указатель на поле установки значений параметров перед названием RRC Treshold и щелкнуть мышью;
- с клавиатуры ввести значение - 4.000;
- нажать кнопку Apply.
4 Для установки значений порогов тревог по времени обратной связи от СИК выполнить действия:
- подвести указатель мыши на поле установки числовых значений параметров перед названием IM Feedback Treshold (Порог обратной связи СИК) и щелкнуть мышью;
- с клавиатуры ввести значение - 5;
- нажать кнопку Apply.
6.1.2.3 В диалоговом окне Reference Station - General RS Settings с активной вкладкой Alarms контролировать установку порогов тревог, показанных в таблице 2.
6.1.3 Установка системы координат, спутниковой системы, минимального угла возвышения и идентификационного номера ОС (RSIM#52, 6)
6.1.3.1 В диалоговом окне Reference Station - General RS Settings активизировать вкладку Receiver Parameters (рис.10).
Примечание - Для активизации вкладки диалогового окна необходимо щелкнуть мышью на названии вкладки.
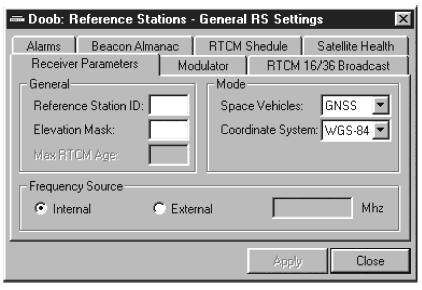
Рисунок 10
6.1.3.2 В диалоговом окне Reference Station - General RS Settings с активной вкладкой Receiver Parameters контролировать идентификационный номер ОС, спутниковую систему, систему координат, минимальный угол возвышения, показанные в таблице 4.
Таблица 4 - Параметры приемника
Название параметра | Обозначение параметра | Значение параметра |
Идентификационный номер ОС | Reference Station | 2 |
Спутниковая система | Space Vehicles | GPS |
Система координат | Coordinate System | ПЗ-90 |
Минимальный угол возвышения | Elevation Mask | 9 |
6.1.3.3 В диалоговом окне Reference Station-General RS Settings с активной вкладкой Receiver Parameters установить систему координат, спутниковую систему, минимальный угол возвышения, идентификационный номер ОС согласно таблице 5.
Таблица 5 - Устанавливаемые параметры приемника
Название параметра | Обозначение параметра | Значение параметра |
Идентификационный номер ОС | Reference Station | 43 |
Спутниковая система | Space Vehicles | ГНСС |
Система координат | Coordinate System | WGS-84 |
Минимальный угол возвышения | Elevation Mask | 8 |
1 Для установки идентификационного номера ОС выполнить действия:
- подвести указатель на поле установки значений перед названием Reference Station ID и щелкнуть мышью;
- с клавиатуры ввести значение параметра - 4;
- нажать кнопку Apply.
2 Для установки спутниковой системы выполнить действия:
- подвести указатель на кнопку против названия Space Vehicles раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить строку с названием спутниковой системы - ГНСС и щелкнуть мышью на кнопке Apply.
3 Для установки системы координат выполнить действия:
- подвести указатель на кнопку против названия Coordinate System раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить строку с названием спутниковой системы - WGS-84 и ввести, нажав на кнопку Apply.
4 Для установки минимального угла возвышения выполнить действия:
- подвести указатель на кнопку против названия Elevation Mask раскрывающегося поля списка и щелкнуть мышью;
- с клавиатуры ввести значение параметра - 8;
- нажать на кнопку Apply.
6.1.3.4 В диалоговом окне Reference Station - General RS Settings с активной вкладкой Receiver Parameters контролировать введенные параметры ОС, показанные в таблице 4.
6.1.4 Установка параметров MSK-модулятора (RSIM#10)
6.1.4.1 В диалоговом окне Reference Station - General RS Settings активизировать вкладку Modulator (рисунок 11).
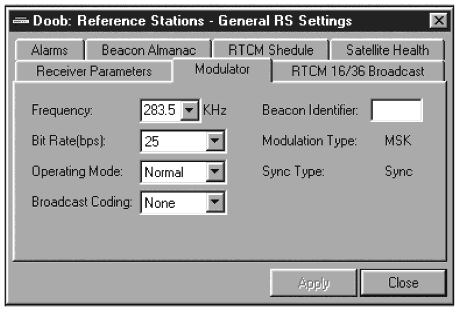
Рисунок 11
6.1.4.2 В диалоговом окне Reference Station - General RS Settings с активной вкладкой Modulator установить параметры MSK - модулятора, показанные в таблице 6 [8].
Таблица 6 - Параметры MSK-модулятора
Название параметра | Обозначение параметра | Значение параметра |
Несущая частота РМк | Frequency | 300 |
Скорость передачи информации | Bit Rate (bps) | 200 |
Режим работы | Operating Mode | Normal |
Кодирование передачи | Broadcast Coding | None |
1 Для установки несущей частоты модулятора выполнить действия:
- подвести указатель на кнопку против названия Frequency раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить строку с числом - 300 и нажать на кнопку Apply.
2 Для установки скорости передачи информации выполнить действия:
- подвести указатель на кнопку со стрелкой против названия Bit Rate(bps) раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить строку с числом - 200 и нажать кнопку Apply.
3 Для установки режима работы выполнить действия:
- подвести указатель на кнопку со стрелкой против названия Operating Mode раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить строку с надписью - Normal и нажать кнопку Apply.
4 Для установки кодирования передачи выполнить действия:
- подвести указатель на кнопку со стрелкой против названия Broadcast Coding раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить строку с надписью - None и нажать кнопку Apply.
6.1.4.3 В диалоговом окне Reference Station - General RS Settings с активной вкладкой Modulator контролировать параметры MSK-модулятора, приведенные в таблице 6.
6.1.5 Ввод параметров близкорасположенных радиомаяков (RSIM#21)
6.1.5.1 В диалоговом окне Reference Station - General RS Setting's активизировать вкладку Beacon Almanac.
6.1.5.2 Контролировать вид диалогового окна Reference Station - General RS Settings с активной вкладкой Beacon Almanac (рисунок 12).
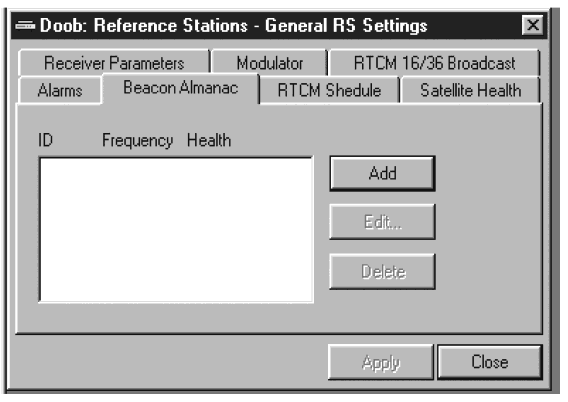
Рисунок 12
6.1.5.3 В диалоговом окне Reference Station - General RS Settings с активной вкладкой Beacon Almanac щелкнуть на кнопке Add. Контролировать наличие диалогового окна Beacon Properties для ввода параметров близкорасположенных радиомаяков (рисунок 13).
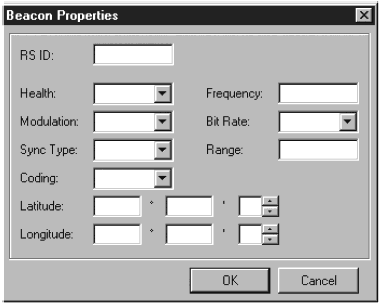
Рисунок 13
6.1.5.4 В диалоговом окне Beacon Properties подвести указатель мыши на кнопку закрытия окна и щелчком мыши закрыть диалоговое окно Beacon Properties.
6.1.6 Установка и редактирование перечня и расписания передаваемых RTSM сообщений (RSIM#22)
6.1.6.1 В диалоговом окне Reference Station - General RS Settings активизировать вкладку RTCM Schedulee (рисунок 14).
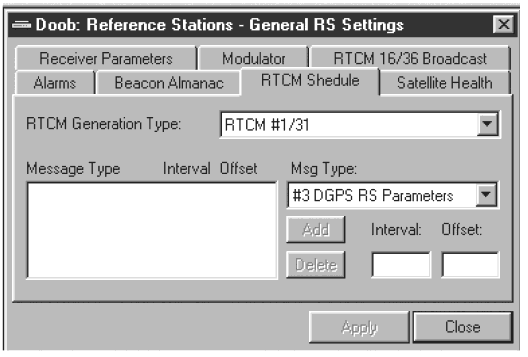
Рисунок 14
6.1.6.2 В диалоговом окне Reference Station - General RS Settings с активной вкладкой RTCM Schedulee в поле с названием RTCM Generation Type установить значение передаваемых RTCM сообщений - RTCM#9/34 Group of 3. В таблицу перечня Message Type ввести типы передаваемых сообщений, интервал и время старта:
- RTCM# 3/1800/900;
- RTCM# 32/1800/960;
- RTCM# 5/900/300.
6.1.6.3 Установка значения передаваемых RTCM сообщений
Для установки значения передаваемых RTCM сообщений выполнить действия:
- подвести указатель на кнопку со стрелкой против названия RTCM Generation Type раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить значение - RTCM#9/34 Group of 3 и нажать кнопку Apply.
6.1.6.4 Введение в таблицу перечней сообщений Message Type тип, интервал и время старта передаваемых RTCM сообщений
Для введения в таблицу перечней сообщений Message Type типа, интервала и время старта передаваемого RTCM сообщения #3 DGPS RS Parameters выполнить действия:
- подвести указатель на кнопку со стрелкой ниже названия Msg Type раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить строку с надписью - #3 DGPS RS Parameters;
- подвести указатель на поле установки значений ниже названия Interval и щелкнуть мышью;
- с клавиатуры ввести значение интервала - 1800;
- подвести указатель на поле установки значений ниже названия Offset и щелкнуть мышью;
- с клавиатуры ввести значение времени старта - 900;
- нажать кнопку Add.
6.1.6.5 Для введения в таблицу перечней сообщений Message Type типа, интервала и времени старта передаваемого RTCM сообщения #32 DGLN RS Parameters выполнить действия:
- подвести указатель на кнопку ниже названия Msg Type раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить строку с надписью - #32 DGLN RS Parameters, подвести указатель на поле установки значений ниже названия Interval и щелкнуть мышью;
- с клавиатуры ввести значение интервала - 1800;
- подвести указатель на поле установки значений ниже названия Offset и щелкнуть мышью;
- с клавиатуры ввести значение времени старта - 960;
- нажать кнопку Add.
6.1.6.6 Для введения в таблицу перечней сообщений Message Type типа, интервала и время старта передаваемого RTCM сообщения #5 GPS Sv's Health выполнить действия:
- подвести указатель на кнопку со стрелкой ниже названия Msg Type раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить строку с надписью #5 GPS Sv's Health;
- подвести указатель на поле установки значений ниже названия Interval и щелкнуть мышью;
- с клавиатуры ввести значение интервала - 900;
- подвести указатель на поле установки значений ниже названия Offset и щелкнуть мышью;
- с клавиатуры ввести значение времени старта - 300;
- нажать на кнопку Add;
- для ввода значений в таблицу перечня нажать кнопку Apply.
6.1.6.7 В диалоговом окне Reference Station - General RS Settings с активной вкладкой RTCM Schedule в таблице перечня сообщений Message Type контролировать типы передаваемых сообщений, интервал и время старта согласно 6.1.13.2.
6.1.6.8 В диалоговом окне Reference Station - General RS Settings с активной вкладкой RTCM Schedulee в таблице перечня сообщений Message Type удалить тип сообщения #5 GPS Sv's Health.
6.1.6.9 Для удаления из таблицы перечня сообщений Message Type типа сообщения #5 GPS SV's Health выполнить действия:
- в таблице перечня сообщений Message Type выделить строку с надписью #5 GPS SV's Health;
- нажать на кнопку Delete.
6.1.6.10 В диалоговом окне Reference Station - General RS Settings с активной вкладкой RTCM Schedulee в таблице перечня сообщений Message Type контролировать отсутствие типа сообщения #5 GPS SV's Health.
6.1.6.11 В таблице перечня сообщений Message Type ввести тип сообщения #5 GPS SV's Health.
Для введения в таблицу перечней сообщений Message Type, интервала и время старта передаваемого RTCM сообщения #5 GPS Sv's Health выполнить действия:
- подвести указатель на кнопку со стрелкой ниже названия Msg Type раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить строку с надписью - #5 GPS Sv's Health;
- подвести указатель на поле установки значений ниже названия Interval и щелкнуть мышью;
- с клавиатуры ввести значение интервала - 900;
- подвести указатель на поле установки значений ниже названия Offset и щелкнуть мышью;
- с клавиатуры ввести значение времени старта - 300;
- нажать на кнопку Add;
- для ввода значений в таблицу перечня нажать кнопку Apply.
6.1.6.12 В диалоговом окне Reference Station - General RS Settings с активной вкладкой RTCM Schedulee в таблице перечня сообщений Message Type контролировать типы передаваемых сообщений, интервал и время старта согласно 6.1.13.2.
6.1.7 Ввод текстовых сообщений (RSIM#23)
6.1.7.1 В диалоговом окне Reference Station - General RS Settings активизировать вкладку RTCM 16/36 Broadcast (рисунок 15).
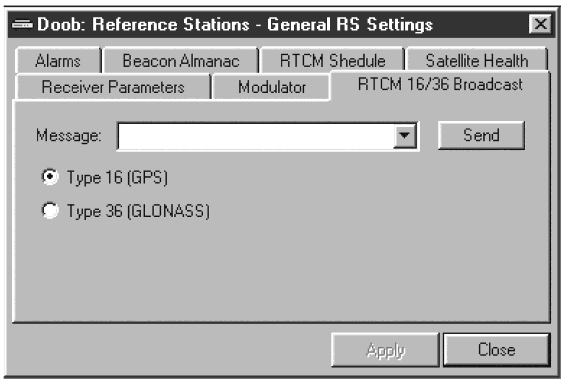
Рисунок 15
1 Для ввода и передачи текстовых сообщений в эфир выполнить действия:
- подвести указатель на поле ввода текстовых сообщений против названия Message и щелкнуть мышью;
- с клавиатуры ввести передаваемое сообщение "DOOB-dGLONASS TEST MODE" и нажать на кнопку Send.
6.1.7.2 В диалоговом окне Reference Station - General RS Settings с активной вкладкой RTCM 16/36 Broadcast в поле ввода текстовых сообщений против названия Message контролировать надпись "DOOB-dGLONASS TEST MODE".
6.1.8 Контроль и ввод опорных координат ОС(RSIM#6)
6.1.8.1 Вызвать диалоговое окно RS 1 Settings.
6.1.8.2 В диалоговом окне RS 1 Settings активизировать вкладку Position (рисунок 16). На БПВ ОС включить формуляр POS2.
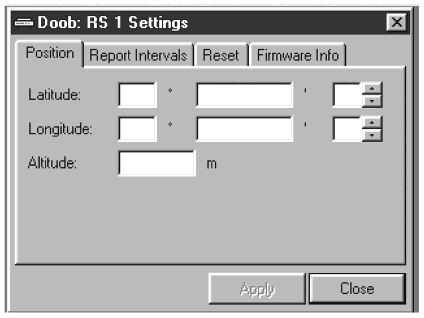
Рисунок 16
6.1.8.3 В диалоговом окне RS 1 Settings с активной вкладкой Position контролировать и зафиксировать опорные координаты ОС.
Значение широты, долготы и высоты в диалоговом окне RS 1 Settings с активной вкладкой Position должно соответствовать значению широты, долготы и высоты, индицируемого на дисплее ОС.
6.1.8.4 В диалоговом окне RS 1 Settings с активной вкладкой Position ввести новые координаты широты, долготы и высоты:
- значения широты вводятся в градусах, минутах и долях минуты;
- значения долготы в градусах, минутах и долях минуты;
- значения высоты вводятся в метрах.
1 Для введения новых значений широты, измененных в двух младших разрядах, выполнить действия:
- подвести указатель на второе поле для ввода значения против названия Latitude и щелкнуть мышью;
- с клавиатуры изменить значение двух младших разрядов широты и нажать кнопку Apply.
2 Для введения новых значений долготы, измененных в двух младших разрядах, выполнить действия:
- подвести указатель на второе поле для ввода значения против названия Longitude и щелкнуть мышью;
- с клавиатуры изменить значение двух младших разрядов долготы и нажать кнопку Apply.
3 Для введения новых значений высоты, измененных в двух младших разрядах, выполнить действия:
- подвести указатель на поле для ввода значения против названия Altitude и щелкнуть мышью;
- с клавиатуры изменить значение двух младших разрядов высоты и нажать кнопку Apply.
6.1.8.5 В диалоговом окне RS 1 Settings с активной вкладкой Position и на дисплее БПВ ОС контролировать измененные в двух младших разрядах координаты широты, долготы и высоты.
6.1.8.6 В диалоговое окно RS 1 Settings с активной вкладкой Position ввести координаты. Ввод координат проводить согласно 6.1.8.4.
6.1.8.7 В диалоговом окне RS 1 Settings с активной вкладкой Position и на дисплее ОС контролировать координаты, зафиксированные в 6.1.8.3.
6.1.9 Установка периодичности отчетных сообщений (RSIM#1)
6.1.9.1 В окне RS1 Settings активизировать вкладку Report Interval (рисунок 17).
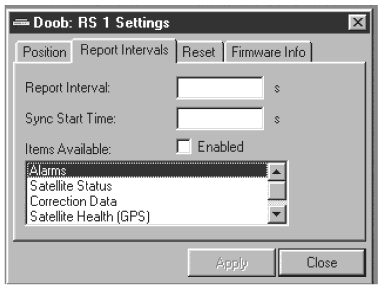
Рисунок 17
6.1.9.2 В диалоговом окне RS 1 Settings с активной вкладкой Report Interval установить периодичность и время старта отчетных сообщений в секундах (таблица 7).
Таблица 7 - Периодичность и время старта отчетных сообщений
Название отчетного сообщения | Обозначение отчетного сообщения | Периодичность отчетных сообщений в с | Время старта отчетных сообщений в с |
Тревоги | Alarms (RSIM#12) | 0 | 0 |
Параметры спутников | Satellite Status (RSIM#7) | 10 | 0 |
Корректирующая информация ОС | Correction Data(RSIM#13) | 2 | 0 |
Состояние спутников GPS | Satellite Health GPS (RSIM#9) | 60 | 0 |
Состояние спутников ГЛОНАСС | Satellite Health GL (RSIM#51) | 60 | 0 |
1 Для установки периодичности и времени старта отчетных сообщений по тревогам выполнить действия:
- в поле окна Items Available выделить строку с надписью Alarms;
- подвести указатель на поле для ввода значения времени старта против названия Sync Start Time и щелкнуть мышью;
- с клавиатуры ввести значение времени старта сообщения равное - 0;
- подвести указатель на поле для ввода значения интервала сообщений против Report Interval и щелкнуть мышью;
- с клавиатуры ввести значение интервала сообщений - 0;
- выделить кнопку Enabled и нажать на кнопку Apply.
2 Для установки периодичности и времени старта отчетных сообщений по параметрам спутников выполнить действия:
- в поле окна Items Available выделить строку с надписью Satellite Status;
- подвести указатель на поле для ввода значения времени старта против Sync Start Time и щелкнуть мышью;
- с клавиатуры ввести значение времени старта сообщения - 0;
- подвести указатель на поле для ввода значения интервала сообщений против Report Interval и щелкнуть мышью;
- с клавиатуры ввести значение интервала сообщений - 10;
- выделить кнопку Enabled и нажать кнопку Apply.
3 Для установки периодичности и времени старта отчетных сообщений поправок ОС выполнить действия:
- в поле окна Items Available выделить строку с надписью Correction Data;
- подвести указатель на поле для ввода значения времени старта против Sync Start Time и щелкнуть мышью;
- с клавиатуры ввести значение времени старта сообщения - 0;
- подвести указатель на поле для ввода значения интервала сообщений против Report Interval и щелкнуть мышью;
- с клавиатуры ввести значение интервала сообщений - 2;
- выделить кнопку Enabled и нажать кнопку Apply.
4 Для установки периодичности и времени старта отчетных сообщений по состоянию здоровья спутников выполнить действия:
- в поле окна Items Available выделить строку с надписью Satellite Health (GPS);
- подвести указатель на поле для ввода значения времени старта против Sync Start Time и щелкнуть мышью;
- с клавиатуры ввести значение времени старта сообщения - 0;
- подвести указатель на поле для ввода значения интервала сообщений против Report Interval и щелкнуть мышью;
- с клавиатуры ввести значение интервала сообщений - 60;
- выделить кнопку Enabled и нажать кнопку Apply.
5 Для установки периодичности и времени старта отчетных сообщений по состоянию здоровья спутников выполнить действия:
- в поле окна Items Available выделить строку с надписью Satellite Health (GLONASS);
- подвести указатель на поле для ввода значения времени старта против Sync Start Time и щелкнуть мышью;
- с клавиатуры ввести значение времени старта сообщения - 0;
- подвести указатель на поле для ввода значения интервала сообщений против Report Interval и щелкнуть мышью;
- с клавиатуры ввести значение интервала сообщений - 60;
- выделить кнопку Enabled и нажать кнопку Apply.
6.1.9.3 По очереди выделяя в поле окна Items Available диалогового окна RS 1 Settings с активной вкладкой Report Interval строки с названиями отчетных сообщений Alarms, Satellite Status, Correction Data, Satellite Health (GPS), Satellite Health (GLONASS), контролировать введенные параметры отчетных сообщений (таблица 7).
6.1.10 Контроль версии ПМО ОС (RSIM#27)
6.1.10.1 В диалоговом окне RS 1 Settings активизировать вкладку Firmware Info (рисунок 18).
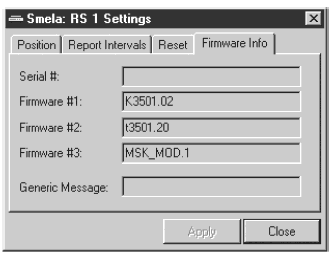
Рисунок 18
6.1.10.2 В диалоговом окне RS 1 Settings с активной вкладкой Firmware Info контролировать версии ПМО БПВ ОС:
- на КВУ против названия Firmware #1;
- на датчике против названия Firmware #2;
- на модуляторе против названия Firmware #3.
6.1.10.3 На левой панели окна закрыть дерево ОС и раскрыть дерево СИК.
Контролировать структурные компоненты СИК, приведенные на рисунке 19.
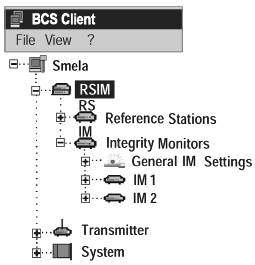
Рисунок 19
Компонент RSIM/Integrity Monitor включает в себя:
- общие установки для обеих СИК - General IM Settings;
- отдельные установки и контроль блока СИК под номером один, обозначается как IM 1;
- отдельные установки и контроль блока СИК под номером два, обозначается как IM 2.
6.1.10.4 Общие и отдельные установки для СИК и СИК 1. После раскрытия СИК 1, раскрыть Settings и View. Контролировать индикацию левой панели окна (рисунок 20).
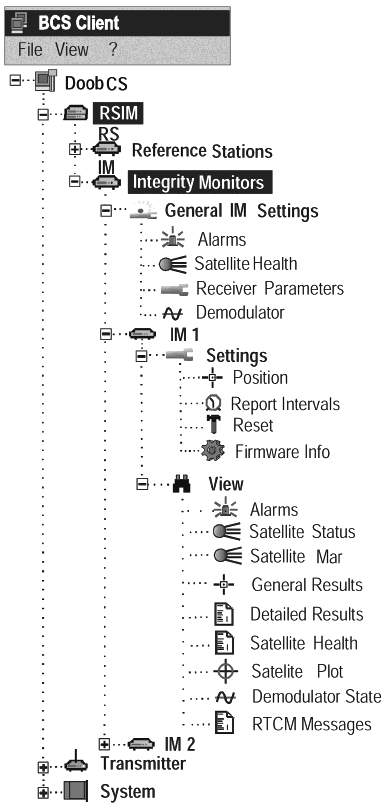
Рисунок 20
6.1.11 Установка значений порогов тревог для СИК (RSIM#16)
6.1.11.1 Вызвать диалоговое окно Integrity Monitors - General IM Settings.
6.1.11.2 В диалоговом окне Integrity Monitors - General IM Settings активизировать вкладку Alarms (рисунок 21).
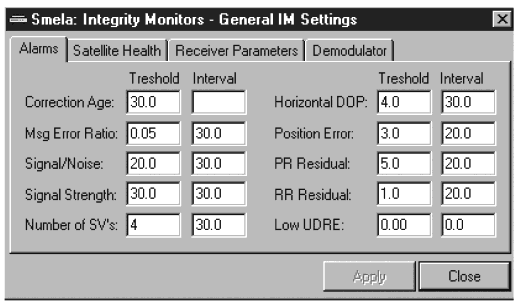
Рисунок 21
6.1.11.3 В диалоговом окне Integrity Monitors - General IM Settings с активной вкладкой Alarms контролировать значение порогов тревог СИК согласно таблице 9.
Таблица 8 - Значение порогов тревог СИК
Название порогов тревог | Обозначение порогов тревог (название параметра) | Числовое значение | Интервал времени |
Возраст поправок | Сorrection Age | 18.0 | |
Процент ошибочных сообщений с ОС | Msg Error Ratio | 0.06 | 25.0 |
Отношение сигнал/шум MSK-приемника | Signal/Noise | 23.0 | 25.0 |
Уровень сигнала MSK-приемника | Signal Strengh | 42.0 | 25.0 |
Число спутников | Number of Sv's | 5 | 25.0 |
Геометрический фактор | Horizontal DOP | 3.0 | 25.0 |
Ошибка определения координат | Position Error | 5.5 | 06.0 |
Величина остаточной погрешности псевдодальности | PR Residual | 2.8 | 25.0 |
Величина остаточной погрешности скорости изменения псевдодальности | RR Residual | 0.99 | 25.0 |
Ошибка дифференциальной дальности потребителя в метрах | Low UDRE | 00.00 | 0.0 |
6.1.11.4 В диалоговом окне Integrity Monitors General IM Settings с активной вкладкой Alarms установить значение порогов тревог СИК согласно таблице 9.
Таблица 9 - Установленные значения порогов тревог СИК
Название порогов тревог | Обозначение порогов тревог | Числовое значение | Интервал времени |
Возраст поправок | Correction Age | 20.0 | |
Процент ошибочных сообщений с ОС | Msg Error Ratio | 0.05 | 30.0 |
Отношение сигнал/шум MSK-приемника | Signal/Noise | 22.0 | 30.0 |
Уровень сигнала MSK-приемника | Signal Strengh | 40.0 | 30.0 |
Число спутников | Number of Sv's | 4 | 30.0 |
Геометрический фактор | Horizontal DOP | 4.0 | 30.0 |
Ошибка определения координат | Position Error | 5.0 | 05.0 |
Величина остаточной погрешности псевдодальности | PR Residual | 3.0 | 30.0 |
Величина остаточной погрешности скорости изменения псевдодальности | RR Residual | 1.0 | 30.0 |
Ошибка дифференциальной дальности пользователя в метрах | Low UDRE | 00.00 | 00.0 |
1 Для установки значений порогов тревог по возрасту поправок выполнить действия:
- подвести указатель на поле установки значений на пересечении столбца Treshold и названия Correction Age и щелкнуть мышью;
- с клавиатуры ввести значение - 20.0;
- нажать кнопку Apply.
2 Для установки значений порогов тревог и интервала времени по проценту ошибочных сообщений с ОС выполнить следующие действия:
- подвести указатель на поле установки значений на пересечении столбца Treshold и названия Msg Error Ratio и щелкнуть мышью;
- ввести значение процента ошибочных сообщений - 0.05;
- подвести указатель на поле установки значений интервала времени на пересечении столбца Interval и названия Msg Error Ratio и щелкнуть мышью;
- ввести значение интервала - 30.0;
- нажать кнопку Apply.
3 Для установки значений порогов тревог и интервала времени по отношению сигнал/шум MSK-приемника выполнить следующие действия:
- подвести указатель мыши на поле установки числовых значений отношения сигнал/шум MSK-приемника на пересечении столбца Treshold и названия Signal/Noise и щелкнуть мышью;
- ввести значение отношения сигнал/шум MSK-приемника - 22.0;
- подвести указатель на поле установки значений интервала времени на пересечении столбца Interval и названия Signal/ Noise и щелкнуть мышью;
- ввести значение интервала времени - 30.0;
- нажать кнопку Apply.
4 Для установки значений порогов тревог и интервала времени по уровню сигнала MSK приемника выполнить следующие действия:
- подвести указатель на поле установки значений на пересечении столбца Treshold и названия Signal Strengh и щелкнуть мышью;
- ввести значение - 40.0;
- подвести указатель на поле установки значений интервала времени на пересечении столбца Interval и названия Signal Strengh и щелкнуть мышью;
- ввести значение интервала времени - 30.0;
- нажать кнопку Apply.
5 Для установки значений порогов тревог и интервала времени по числу спутников выполнить следующие действия:
- подвести указатель на поле установки значений на пересечении столбца Treshold и названия Number of Sv's и щелкнуть мышью;
- ввести значение - 4;
- подвести указатель на поле установки значений интервала времени на пересечении столбца Interval и названия Number of Sv's и щелкнуть мышью;
- ввести значение интервала времени - 30.0;
- нажать кнопку Apply.
6 Для установки значений порогов тревог и интервала времени по геометрическому фактору выполнить следующие действия:
- подвести указатель на поле установки значений на пересечении столбца Treshold и названия Horizontal DOP и щелкнуть мышью;
- ввести значение - 4.0;
- подвести указатель на поле установки значений интервала времени на пересечении столбца Interval и названия Horizontal DOP и щелкнуть мышью;
- ввести значение интервала времени - 30.0;
- нажать кнопку Apply.
7 Для установки значений порогов тревог и интервала времени по ошибке определения координат выполнить следующие действия:
- подвести указатель на поле установки значений на пересечении столбца Treshold и названия Position Error и щелкнуть мышью;
- ввести значение - 5.0;
- подвести указатель на поле установки значений интервала времени на пересечении столбца Interval и названия Position Error и щелкнуть мышью;
- ввести значение интервала времени - 05.0;
- нажать кнопку Apply.
8 Для установки значений порогов тревог и интервала времени по величине псевдодальности выполнить следующие действия:
- подвести указатель на поле установки значений на пересечении столбца Treshold и названия PR Residual и щелкнуть мышью;
- ввести значение - 3.0;
- подвести указатель на поле установки значений интервала времени на пересечении столбца Interval и названия PR Residual и щелкнуть мышью;
- ввести значение интервала времени - 30.0;
- нажать кнопку Apply.
9 Для установки значений порогов тревог и интервала времени по величине скорости изменения псевдодальности выполнить следующие действия:
- подвести указатель на поле установки значений на пересечении столбца Treshold и названия RR Residual и щелкнуть мышью;
- ввести значение - 1.0;
- подвести указатель на поле установки значений интервала времени на пересечении столбца Interval и названия RR Residual и щелкнуть мышью;
- ввести значение интервала времени - 30.0;
- нажать кнопку Apply.
10 Для установки значений порогов тревог и интервала времени по ошибке дифференциальной дальности пользователя в метрах выполнить следующие действия:
- подвести указатель на поле установки значений на пересечении столбца Treshold и названия Low UDRE и щелкнуть мышью;
- ввести значение - 0.00;
- подвести указатель на поле установки значений интервала времени на пересечении столбца Interval и названия Low UDRE и щелкнуть мышью;
- ввести значение интервала времени - 0.0;
- нажать кнопку Apply.
6.1.11.5 В диалоговом окне Integrity Monitors - General IM Settings с активной вкладкой Alarms контролировать введенные значения порогов:
- тревог и интервала времени по возрасту поправок;
- процента ошибочных сообщений с ОС;
- отношения сигнал/шум MSK-приемника;
- уровня сигнала MSK-приемника;
- числа спутников;
- геометрического фактора;
- ошибки определения координат;
- величины псевдодальности;
- величины скорости изменения псевдодальности;
- ошибки дифференциальной дальности пользователя согласно таблице 9.
6.1.12 Установка системы координат, спутниковой системы, идентификационного номера ОС, минимального угла возвышения и максимального возраста жизни поправок (RSIM#52, 6)
6.1.12.1 В диалоговом окне Integrity Monitors - General IM Settings активизировать вкладку Receiver Parameters (рисунок 22).
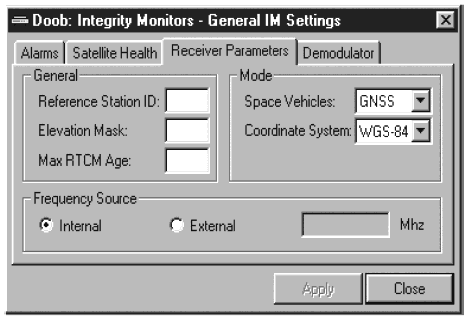
Рисунок 22
6.1.12.2 В диалоговом окне Integrity Monitors - General IM Settings с активной вкладкой Receiver Parameters контролировать идентификационный номер ОС, с которой работает СИК, спутниковую систему, систему координат, минимальный угол возвышения согласно таблице 10.
Таблица 10 - Параметры приемника
Название параметра | Обозначение параметра | Значение параметра |
Идентификационный номер опорной станции | Reference Station | 2 |
Спутниковая система | Space Vehicles | GPS |
Система координат | Coordinate System | ПЗ-90 |
Минимальный угол возвышения | Elevation Mask | 9 |
6.1.12.3 В диалоговом окне Integrity Monitors - General IM Settings с активной вкладкой Receiver Parameters установить систему координат, спутниковую систему, идентификационный номер ОС с которой работает СИК, минимальный угол возвышения и максимальный возраст поправок, согласно таблице 11.
Таблица 11 - Установленные параметры приемника
Название параметра | Обозначение параметра | Значение параметра |
Идентификационный номер ОС | Reference Station ID | 1 |
Минимальный угол возвышения | Elevation Mask | 8 |
Максимальный возраст поправок | Max RTCM Age | 30 |
Спутниковая система | Space Vehicles | GNSS |
Система координат | Coordinate System | WGS-84 |
1 Для установки идентификационного номера ОС, с которой работает СИК, выполнить действия:
- подвести указатель на поле установки значений перед названием Reference Station ID и щелкнуть мышью;
- ввести значение параметра - 1;
- нажать кнопку Apply.
2 Для установки спутниковой системы выполнить действия:
- подвести указатель на кнопку со стрелкой против названия Space Vehicles раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить строку с надписью - GNSS и нажать кнопку Apply.
3 Для установки системы координат выполнить действия:
- подвести указатель на кнопку со стрелкой против названия Coordinate System раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить строку с надписью - WGS-84 и нажать кнопку Apply.
4 Для установки минимального угла возвышения выполнить действия:
- подвести указатель на поле установки значений перед названием Elevation Mask и щелкнуть мышью;
- ввести значение параметра - 8;
- нажать кнопку Apply.
5 Для установки максимального возраста поправок выполнить действия:
- подвести указатель на поле установки значений перед названием Max RTCM Age и щелкнуть мышью;
- ввести значение параметра - 30;
- нажать кнопку Apply.
6.1.12.4 В диалоговом окне Integrity Monitors - General IM Settings с активной вкладкой Receiver Parameters контролировать идентификационный номер ОС, с которой работает СИК, спутниковую систему, систему координат, минимальный угол возвышения, максимальную жизнь возраста поправок согласно таблице 11.
6.1.13 Установка параметров MSK-демодулятора (RSIM#14)
6.1.13.1 В диалоговом окне Integrity Monitors - General IM Settings активизировать вкладку Demodulator (рисунок 23).
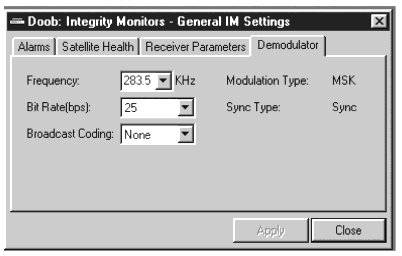
Рисунок 23
6.1.13.2 В диалоговом окне Integrity Monitors - General IM Settings с активной вкладкой Demodulator установить параметры демодулятора согласно таблице 12.
Таблица 12 - Параметры MSK - демодулятора
Название параметра | Обозначение параметра | Числовое значение параметра |
Несущая частота РМк | Frequency | 300 |
Скорость передачи информации | Bit Rate(bps) | 200 |
Кодирование передачи | Broadcast Coding | None |
1 Для установки несущей частоты РМк выполнить действия:
- подвести указатель на кнопку со стрелкой против названия Frequency раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить строку с числом 300 и нажать кнопку Apply.
2 Для установки скорости передачи информации выполнить действия:
- подвести указатель на кнопку со стрелкой против названия Bit Rate раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить строку с числом 200 и нажать кнопку Apply.
3 Для установки кодирования передачи выполнить действия:
- подвести указатель, на кнопку со стрелкой против названия Broadcast Coding раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить строку с надписью None и нажать кнопку Apply.
6.1.13.3 В диалоговом окне Integrity Monitors - General IM Settings с активной вкладкой Demodulator контролировать введенные параметры MSK-демодулятора согласно таблице 12.
6.1.14 Установка опорных координат на СИК
6.1.14.1 Вызвать диалоговое окно IM 1 Settings.
6.1.14.2 В диалоговом окне IM 1 Settings активизировать вкладку Position (рисунок 24).
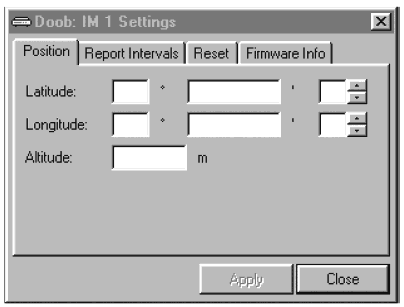
Рисунок 24
6.1.14.3 В диалоговом окне IM 1 Settings с активной вкладкой Position контролировать и зафиксировать опорные координаты СИК.
Значение широты, долготы и высоты в диалоговом окне должно соответствовать значению широты, долготы и высоты, индицируемых в формуляре POS2 БПВ СИК.
6.1.14.4 В диалоговом окне IM 1 Settings с активной вкладкой Position ввести новые значения координат широты, долготы и высоты, которые отличаются от зафиксированных координат значениями двух младших разрядов:
- значения широты вводятся в градусах, минутах и долях минуты;
- значения долготы в градусах, минутах и долях минуты;
- значения высоты вводятся - в метрах.
1 Для введения новых значений широты, измененных в двух младших разрядах, выполнить действия:
- подвести указатель на второе поле для ввода значения против Latitude и щелкнуть мышью;
- изменить значение двух младших разрядов широты и нажать кнопку Apply.
2 Для введения новых значений долготы, измененных в двух младших разрядах, выполнить действия:
- подвести указатель на второе поле для ввода значения против Longitude и щелкнуть мышью;
- изменить значение двух младших разрядов долготы и нажать кнопку Apply.
3 Для введения новых значений высоты, измененных в двух младших разрядах, выполнить действия:
- подвести указатель на поле для ввода значения против Altitude и щелкнуть мышью;
- изменить значение двух младших разрядов высоты и нажать кнопку Apply.
6.1.14.5 В диалоговом окне IM 1 Settings с активной вкладкой Position и в формуляре POS2 БПВ СИК контролировать изменение в двух младших разрядах координат широты, долготы и высоты.
6.1.14.6 В диалоговом окне IM 1 Settings с активной вкладкой Position ввести координат широты, долготы и высоты, зафиксированные в 6.1.14.3.
Ввод координат проводить согласно 6.1.14.4.
6.1.14.7 В диалоговом окне IM 1 Settings с активной вкладкой Position и в формуляре POS2 БПВ СИК контролировать координаты широты, долготы и высоты, зафиксированные в 6.1.14.3.
6.1.15 Установка периодичности отчетных сообщений (RSIM#1)
6.1.15.1 В диалоговом окне IM 1 Settings активизировать вкладку Report Intervals (рисунок 25).
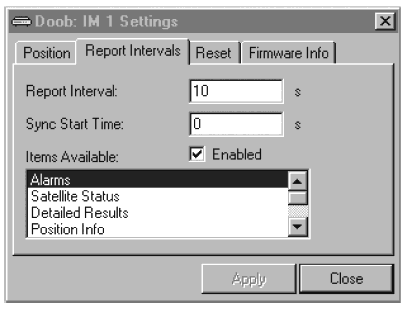
Рисунок 25
6.1.15.2 В диалоговом окне IM 1 Setting с активной вкладкой Report Intervals установить периодичность и время старта отчетных сообщений в секундах согласно таблице 13.
Таблица 13 - Периодичность и время старта отчетных сообщений
Название отчетного сообщения | Обозначение отчетного сообщения | Периодичность отчетных сообщений (с) | Время старта отчетных сообщений (с) |
Тревоги | Alarms (RSIM#16) | 0 | 0 |
Параметры спутников | Satellite Status (RSIM#7) | 10 | 0 |
Подробные результаты интегрального контроля | Detailed Results (RSIM#19) | 2 | 0 |
Обобщенные результаты интегрального контроля | Position Info (RSIM#18) | 2 | 0 |
Состояние демодулятора | Demodulator State (RSIM#15) | 10 | 0 |
Состояние спутников GPS | Satellite Health GPS (RSIM#9) | 60 | 0 |
Состояние спутников ГЛОНАСС | Satellite Health GL(RSIM#51) | 60 | 0 |
1 Для установки периодичности и времени старта отчетных сообщений по тревогам выполнить действия:
- в поле окна Items Available выделить строку с надписью Alarms;
- подвести указатель на поле для ввода значения времени старта против названия Sync Start Time и щелкнуть мышью;
- ввести значение времени старта сообщения равное - 0;
- подвести указатель на поле для ввода значения интервала сообщений против названия Report Interval и щелкнуть мышью;
- ввести значение периодичности отчетных сообщений равное - 10;
- выделить на кнопке Enabled и нажать кнопку Apply.
2 Для установки периодичности и времени старта отчетных сообщений по параметрам спутников выполнить действия:
- в поле окна Items Available выделить строку с надписью Satellite Status;
- подвести указатель на поле для ввода значения времени старта против названия Sync Start Time и щелкнуть мышью;
- ввести значение времени старта сообщения равное - 0;
- подвести указатель на поле для ввода значения интервала сообщений против названия Report Interval и щелкнуть мышью;
- ввести значение периодичности отчетных сообщений равное - 10;
- выделить на кнопке Enabled и нажать кнопку Apply.
3 Для установки периодичности и времени старта отчетных сообщений по подробным результатам интегрального контроля выполнить действия:
- в поле окна Items Available выделить строку с надписью Detailed Results;
- подвести указатель на поле для ввода значения времени старта против названия Sync Start Time и щелкнуть мышью;
- ввести значение времени старта сообщения равное - 0;
- подвести указатель на поле для ввода значения интервала сообщений против названия Report Interval и щелкнуть мышью;
- ввести значение периодичности отчетных сообщений равное - 2;
- выделить на кнопке Enabled и нажать кнопку Apply.
4 Для установки периодичности и времени старта отчетных сообщений по обобщенным результатам интегрального контроля выполнить действия:
- в поле окна Items Available выделить строку с надписью Position Info;
- подвести указатель на поле для ввода значения времени старта против названия Sync Start Time и щелкнуть мышью;
- ввести значение времени старта сообщения равное - 0;
- подвести указатель на поле для ввода значения интервала сообщений против названия Report Interval и щелкнуть мышью;
- ввести значение периодичности отчетных сообщений - 2;
- выделить на кнопке Enabled и нажать кнопку Apply.
5 Для установки периодичности и времени старта отчетных сообщений по состоянию демодулятора выполнить действия:
- в поле окна Items Available выделить строку с надписью Demodulator State;
- подвести указатель мыши на поле для ввода числового значения времени старта против названия Sync Start Time и щелкнуть мышью;
- с клавиатуры ввести значение времени старта сообщения равное - 0;
- подвести указатель мыши на поле для ввода числового значения интервала сообщений против названия Report Interval и щелкнуть мышью;
- с клавиатуры ввести значение периодичности отчетных сообщений равное - 10;
- выделить на кнопке Enabled и нажать кнопку Apply.
6 Для установки периодичности и времени старта отчетных сообщений по состоянию спутников GPS выполнить действия:
- в поле окна Items Available выделить строку с надписью Satellite Health (GPS);
- подвести указатель на поле для ввода значения времени старта против названия Sync Start Time и щелкнуть мышью;
- ввести значение времени старта сообщения равное - 0;
- подвести указатель на поле для ввода значения интервала сообщений против названия Report Interval и щелкнуть мышью;
- ввести значение периодичности отчетных сообщений равное - 60;
- выделить на кнопке Enabled и нажать кнопку Apply.
7 Для установки периодичности и времени старта отчетных сообщений по состоянию спутников ГЛОНАСС выполнить действия:
- в поле окна Items Available выделить строку с надписью Satellite Health (GLONASS);
- подвести указатель на поле для ввода значения времени старта против названия Sync Start Time и щелкнуть мышью;
- ввести значение времени старта сообщения - 0;
- подвести указатель на поле для ввода значения интервала сообщений против названия Report Interval и щелкнуть мышью;
- ввести значение периодичности отчетных сообщений равное - 60;
- выделить на кнопке Enabled и нажать кнопку Apply.
6.1.15.3 По очереди выделяя щелчком мыши в поле окна Items Available диалогового окна Settings с активной вкладкой Report Intervals строки с названиями отчетных сообщений Alarms, Satellite Status, Detailed Results, Position Info, Demodulator State, Satellite Health (GPS), Satellite Health (GLONASS), контролировать периодичность и время старта отчетных сообщений согласно таблице 13.
6.1.15.4 На БПВ ОС включить формуляр MODE1.
В первой строке формуляра контролировать индикацию режима работы СИК S: GNSS, индикацию установленного угла возвышения Elev: 08.
Во второй строке формуляра контролировать индикацию установленной системы координат ОС: WGS-84.
На БПВ ОС включить формуляр POS 2.
В четвертой строке формуляра контролировать индикацию установленного идентификационного номера ОС RS Index: 43.
На БПВ ОС включить формуляр ALRM 2:
- в первой строке формуляра контролировать значение порога тревоги по минимальному количеству спутников равному четырем;
- во второй строке формуляра контролировать значение порога тревоги по максимальной величине поправки псевдодальности равной 100 м;
- в третьей строке формуляра контролировать значение порога тревоги по максимальной величине поправки скорости изменения псевдодальности равной 4,0 м/с;
- в четвертой строке формуляра контролировать значение порога тревоги по максимальному времени обратной связи с СИК равному 5 с.
6.1.15.5 На БПВ СИК включить формуляр MODE 1.
- В первой строке формуляра контролировать индикацию режима работы СИК S: GNSS, индикацию установленного угла возвышения Elev: 08.
- Во второй строке формуляра контролировать индикацию установленной системы координат WGS-84.
На БПВ СИК включить формуляр ALRM 2.
6.1.15.6 В формуляре ALRM2 БПВ СИК контролировать интервал времени измерений и значения порогов тревог СИК согласно таблице 14.
Таблица 14 - Интервал времени измерений и числовые значения порогов тревог СИК
Название порогов тревог | Обозначение порогов тревог | Значение | Интервал времени |
Возраст поправок | Age | 020 | |
Процент ошибочных сообщений с ОС | MER | 05.0 | Т: 030 |
Отношение сигнал/шум MSK-приемника | SNR | 022 | Т: 030 |
Уровень сигнала MSK-приемника | SS | 040 | Т: 030 |
Число спутников | SATs | 04 | Т: 030 |
Геометрический фактор | HDOP | 4.0 | Т: 030 |
Ошибка определения координат | POS | 05.00 | Т: 0.05 |
Величина остаточной погрешности псевдодальности | rPRC | 03.00 | Т: 030 |
Величина остаточной погрешности скорости изменения псевдодальности | rRRC | 01.00 | Т: 030 |
Ошибка дифференциальной дальности потребителя в метрах | UDRE | 00.00 | Т: 000 |
6.1.16 Контроль версии ПМО СИК (RSIM#27)
6.1.16.1 В диалоговом окне IM 1 Settings активизировать вкладку Firmwave Info (рисунок 26).
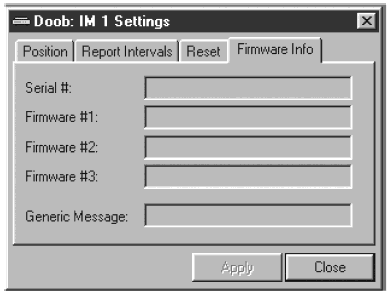
Рисунок 26
6.1.16.2 В диалоговом окне IM 1 Settings с активной вкладкой Firmwave Info контролировать версии ПМО БПВ СИК на:
- КВУ - против названия Firmware #1;
- датчике - против названия Firmware #2;
- демодуляторе - против названия Firmware #3.
6.1.16.3 Раскрыть подкаталог RS 1View Settings. Полосой прокрутки установить вид левой панели (рисунок 28).
6.1.17 Контроль параметров тревог ОС (RSIM#12)
6.1.17.1 Открыть просмотровое окно RS 1 Alarms - тревоги (рисунок 27).
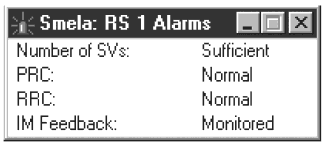
Рисунок 27
6.1.17.2 В окне RS 1 Alarms контролировать отсутствие красной строки и индикацию сообщений по тревогам ОС согласно рисунку 27.
6.1.17.3 В окне RS 1 Alarms подвести указатель мыши на кнопку закрытия окна и щелчком мыши закрыть окно RS 1 Alarms.
6.1.18 Контроль динамической информации о состоянии параметров спутников ОС (RSIM# 7)
6.1.18.1 Открыть окно RS 1 Satellite Status (рисунок 28).
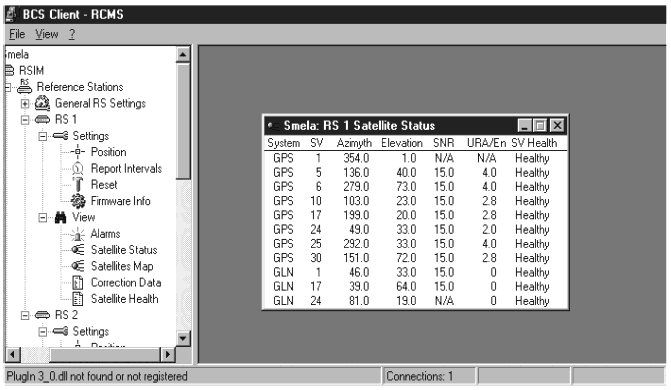
Рисунок 28
6.1.18.2 В просмотровом окне RS 1 Satellite Status контролировать наличие динамической информации о состоянии параметров спутников ОС (рисунок 28),
где
- System - спутниковая система GPS или ГЛОНАСС;
- SV - номер спутника в системе, значения от 1 до 32;
- Azimuth - направление на подспутниковую точку, значения от 0° до 359.9°;
- Elevation - угол возвышения спутника над горизонтом, значения от 0° до 90°;
- SNR - соотношение сигнал/шум, значение от 0 до 15;
- URA - параметр, характеризующий потенциальную точность измерения дальности до спутника GPS. Пределы изменения значения URA от 0 до 32. Значения >6 свидетельствуют о включении селективного доступа;
- En - число суток, прошедшее с момента закладки эфемеридной информации на спутник ГЛОНАСС. En>1 характеризует данный спутник как малопригодный;
- SV Health - состояние спутника, получаемое в составе бортовой информации.
Имеет два значения: Health - исправен, Unhealty - неисправен.
Примечание - Цифровые значения динамической информации изменяются в разные моменты времени.
6.1.19 Контроль динамической карты расположения спутников ОС
6.1.19.1 Открыть просмотровое окно RS 1 Satellite Map.
6.1.19.2 В просмотровом окне RS 1 Satellite Map контролировать отображение динамической карты расположения спутников (рисунок 29).
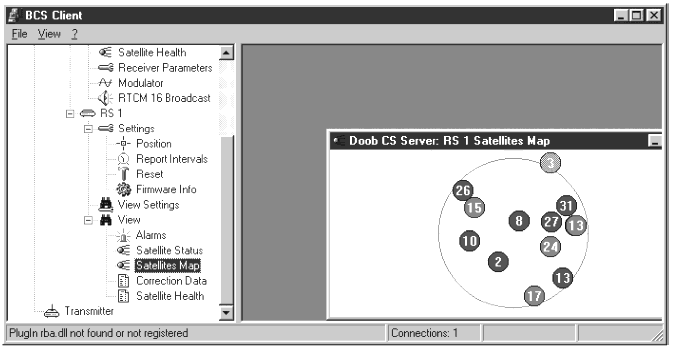
Рисунок 29
Синим цветом обозначены спутники GPS, красным - ГЛОНАСС.
Яркой подсветкой выделены спутники, по которым вырабатываются дифференциальные поправки.
Слабой подсветкой выделены спутники, по которым не вырабатываются дифференциальные поправки.
Примечание - Динамическое расположения спутников на карте изменяется во времени.
6.1.20 Контроль динамической корректирующей информации ОС(RSIM#13)
6.1.20.1 Открыть просмотровое окно RS 1 Corrections Data (рисунок 30).
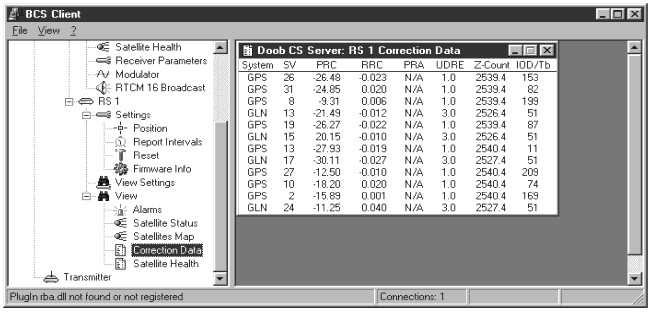
Рисунок 30
6.1.20.2 В просмотровом окне RS 1 Corrections Data контролировать наличие динамической корректирующей информации ОС (рисунок 30),
где
- System - принадлежность спутника к системе GPS или ГЛОНАСС;
- SV - номер спутника в системе, от 1 до 32;
- PRC - поправка псевдодальности;
- RRC - скорость изменения поправки;
- PRA - ускорение поправки, N/A - значение не определено;
- UDRE-дифференциальная точность потребителя;
- Z - count - время "формирования" поправки в шкале времени спутниковой системы;
- IOD - номер набора эфемерид спутника GPS, использованного для расчета поправок;
- Tb - номер набора эфемерид спутника ГЛОНАСС, использованного для расчета поправок.
Примечание - Цифровые значения динамической информации изменяются в разные моменты времени.
6.1.20.3 В просмотровом окне RS 1 Correction Data подвести указатель мыши на кнопку закрытия окна и щелчком мыши закрыть просмотровое окно RS 1 Correction Data.
6.1.21 Контроль динамической информации о состоянии спутников ОС(RSIM#9)
6.1.21.1 Открыть окно RS 1 Satellite Health.
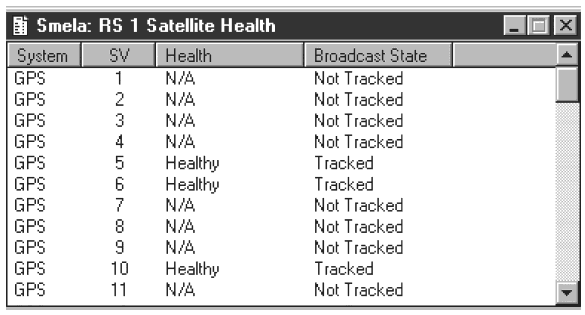
Рисунок 31
6.1.21.2 В окне RS 1 Satellite Health проконтролировать наличие динамической информации о состоянии спутников (рисунок 31),
где
- System - принадлежность спутника к системе GPS или ГЛОНАСС;
- SV - номер спутника в системе, значения от 1 до 32;
- Health - состояние спутника может иметь значения:
- не определено | - N/A; |
- исправен по бортовой информации | - Healthy; |
- неисправен по бортовой информации | - Unhealthy; |
- принудительно исправен | - Force Healthy; |
- принудительно неисправен | - Force Unhealthy; |
- Broadcast State - прием сигнала от спутника: | |
- спутник на слежении | - Tracked; |
- спутник не на слежении | - Not Tracked. |
Примечание - Значения динамической информации изменяются во времени.
6.1.21.3 Установить вид левой панели окна согласно рис.20.
6.1.22 Контроль параметров тревог СИК (RSIM#17)
6.1.22.1 Открыть окно IM 1 Alarms
6.1.22.2 В окне IM 1 Alarms проконтролировать отсутствие красной строки и индикацию сообщений по тревогам ОС (рисунок 32).
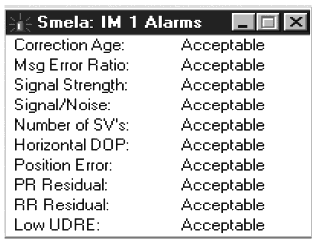
Рисунок 32
6.1.22.3 В окне IM 1 Alarms подвести указатель на кнопку закрытия окна и щелчком мыши закрыть просмотровое окно IM 1 Alarms.
6.1.23 Контроль динамической информации о параметрах спутников станции интегрального контроля (RSIM#7)
6.1.23.1 Открыть окно IM 1 Satellite Status.
6.1.23.2 В окне IM 1 Satellite Status проконтролировать наличие динамической информации о параметрах спутников СИК (рисунок 33),
где
- System - принадлежность спутника к системе GPS или ГЛОНАСС;
- SV - номер спутника в системе, значения от 1 до 32;
- Azimuth - направление на подспутниковую точку, значения от 0 до 359.9°;
- Elevation - угол возвышения спутника над горизонтом, значения от 0° до 90°;
- SNR - соотношение сигнал/шум, значения от 0 до 15;
- URA-параметр, характеризующий потенциальную точность измерения дальности до спутника GPS, значения от 0 до 32. Значения >6 свидетельствуют о включении селективного доступа;
- En - число суток, прошедшее с момента закладки эфемеридной информации на спутник ГЛОНАСС. En>1 характеризует данный спутник как малопригодный;
- SV Health - состояние спутника, получаемое в составе бортовой информации. Имеет два значения: Healthy - исправен, Unhealty - неисправен.
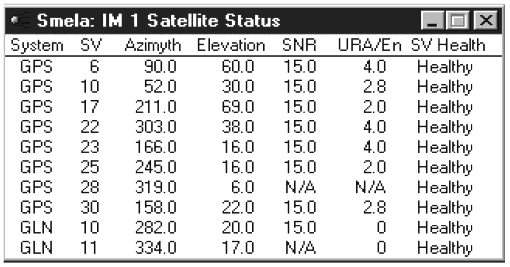
Рисунок 33
6.1.23.3 Активизировать окно RS 1 Satellite Status и поставить его рядом с окном IM 1 Satellite Status. Сравнить динамическую информацию о параметрах спутников в окне RS 1 Satellite Status с динамической информацией о параметрах спутников в просмотровом окне IM 1 Satellite Status. Контролировать идентичность динамической информации в обоих просмотровых окнах.
6.1.23.4 В просмотровом окне RS 1 Satellite Status подвести указатель мыши на кнопку закрытия окна и щелчком мыши закрыть просмотровое окно RS 1 Satellite Status. В окне IM 1 Satellite Status подвести указатель мыши на кнопку закрытия окна и щелчком мыши закрыть просмотровое окно IM 1 Satellite Status.
6.1.24 Контроль динамической информации о состоянии спутников СИК
6.1.24.1 Открыть просмотровое окно IM1 Satellite Health (RSIM#9).
6.1.24.2 В диалоговом окне IM 1 Satellite Health контролировать наличие динамической информации о состоянии спутников СИК (рисунок 34), где
- System - спутниковая система GPS или ГЛОНАСС;
- SV - номер спутника в системе, значения от 1 до 32;
- Health - состояние спутника, может иметь значения:
- не определено | - N/A; |
- исправен по бортовой информации | - Healthy; |
- неисправен по бортовой информации | - Unhealthy; |
- принудительно исправен | - Force Healthy; |
- принудительно неисправен | - Force Unhealthy; |
- Broadcast State - прием сигнала от спутника: | |
- спутник на слежении | - Tracked; |
- спутник не на слежении | - Not Tracked. |
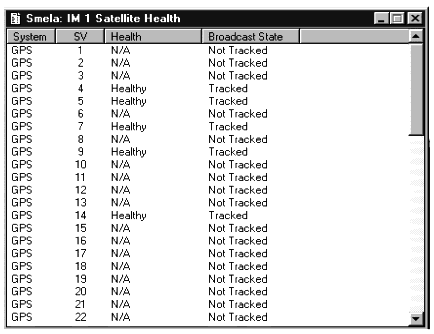
Рисунок 34
Примечание - Значения динамической информации изменяются во времени.
6.1.24.3 Активизировать просмотровое окно RS 1 Satellite Health и поставить его рядом с просмотровым окном IM 1 Satellite Health. Сравнить динамическую информацию о состоянии спутников в просмотровом окне RS 1 Satellite Health с динамической информацией о состоянии спутников в просмотровом окне IM 1 Satellite Health. Контролировать идентичность динамической информации в обеих просмотровых окнах.
6.1.24.4 В просмотровом окне RS 1 Satellite Health подвести указатель мыши на кнопку закрытия окна и щелчком мыши закрыть просмотровое окно RS 1 Satellite Health.
6.1.25 Контроль динамической карты расположения спутников на СИК
6.1.25.1 Открыть просмотровое окно IM 1 Satellite Map.
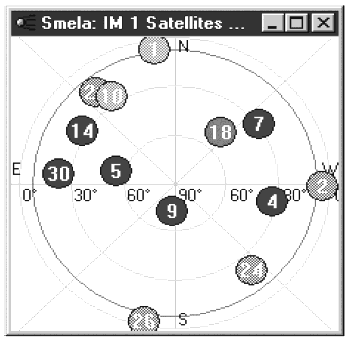
Рисунок 35
6.1.25.2 В просмотровом окне IM 1 Satellite Map контролировать отображение динамической карты расположения спутников (рисунок 35).
Синим цветом обозначены спутники GPS, красным - ГЛОНАСС.
Яркой подсветкой выделены спутники, по которым вырабатываются дифференциальные поправки.
Слабой подсветкой выделены спутники, по которым не вырабатываются дифференциальные поправки.
Примечание - Динамическое расположение спутников на карте изменяется во времени.
6.1.25.3 Активизировать просмотровое окно RS 1 Satellite Map и поставить его рядом с просмотровым окном IM 1 Satellite Map. Сравнить динамическую карту расположения спутников в просмотровом окне RS 1 Satellite Map с динамической картой расположения спутников в просмотровом окне IM 1 Satellite Map. Контролировать идентичность динамической карты расположения спутников в обоих просмотровых окнах.
6.1.26 Контроль динамической информации о подробных результатах интегрального контроля (RSIM#19)
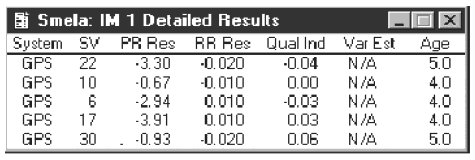
Рисунок 36
6.1.26.1 Открыть окно IM 1 Detailed Results.
6.1.26.2 В окне IM 1 Detailed Results контролировать наличие динамической информации о подробных результатах интегрального контроля (рисунок 36),
где
- System - спутниковая система;
- SV - номер спутника, от 1 до 32;
- PR Res - остаточная погрешность псевдодальности;
- RR Res - остаточная погрешность скорости изменения псевдодальности;
- Qual Ind - показатель качества коррекции;
- Var Est - дисперсия остаточных погрешностей псевдодальности;
- Age - возраст поправок.
6.1.26.3 В окне IM 1 Detailed Results подвести указатель на кнопку закрытия окна и щелчком мыши закрыть просмотровое окно IM 1 Detailed Results.
6.1.27 Контроль параметров демодулятора (RSIM#15)
6.1.27.1 Открыть просмотровое окно IM 1 Demodulator State (рисунок 37).
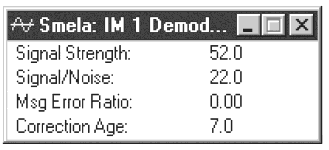
Рисунок 37
6.1.27.2 В окне IM 1 Demodulator State контролировать параметры демодулятора согласно таблице 15.
Таблица 15 - Параметры демодулятора
Название параметра | Обозначение параметра | Числовое значение параметра |
Уровень сигнала | Signal Strengh | Не менее 30.0 |
Отношение сигнал/шум | Signal/Noise | Не менее 22.0 |
Процент ошибочных сообщений | Msg Error Ratio | Не более 5.00 |
Средний возраст поправок | Correction Age | Не более 30 |
6.1.28 Контроль динамической информации об общих результатах интегрального контроля (RSIM#18)
6.1.28.1 Открыть просмотровое окно IM 1 General Results.
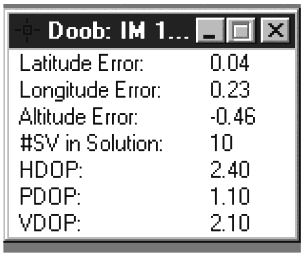
Рисунок 38
6.1.28.2 В окне IM 1 General Results контролировать наличие динамической информации об общих результатах интегрального контроля (рисунок 38).
6.1.28.3 В окне IM 1 General Results подвести указатель на кнопку закрытия окна и щелчком мыши закрыть окно IM 1 General Results.
Просмотр подробных результатов интегрального контроля Detailed Results (RSIM#19) на рисунке 39.
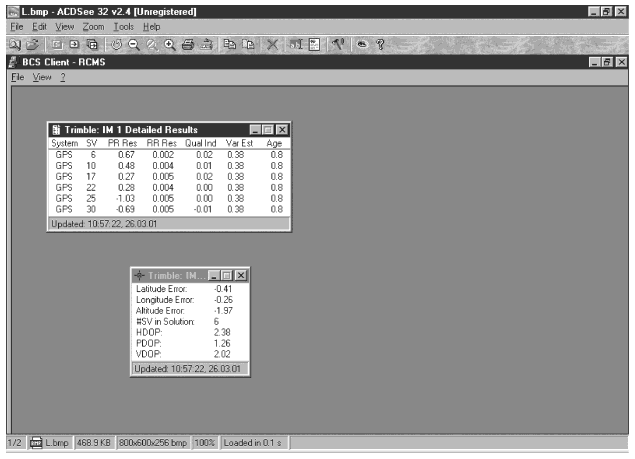
Рисунок 39
6.1.29 Контроль графического отображения текущих координат (мишень)
6.1.29.1 Открыть окно IM 1 Scatter Plot.
6.1.29.2 В окне IM 1 Scatter Plot контролировать графическое отображение текущих координат (рисунок 40).
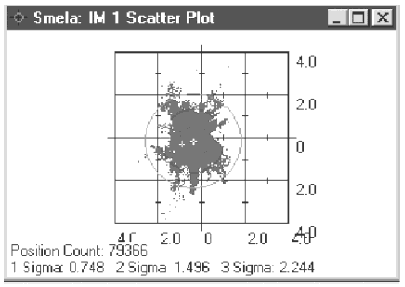
Рисунок 40
6.1.29.3 В окне IM 1 Scatter Plot контролировать изменение числа измерений в строке Position Count. При числе измерений более 1000 контролировать величину СКП определения местоположения согласно таблице 15.
Таблица 15 - Величина СКП определения местоположения
Обозначение параметра | Числовое значение параметра |
1 Sigma | Не более 0,9 |
2 Sigma | Не более 1,8 |
3 Sigma | Не более 2,7 |
6.1.30 Контроль принятого текстового сообщения (RSIM#23)
6.1.30.1 Открыть просмотровое окно IM 1 RTCM Messages.
6.1.30.2 В окне IM 1 RTCM Messages после названия строки RTCM 16 Broadcast Message контролировать наличие принятого сообщение (рисунок 41).
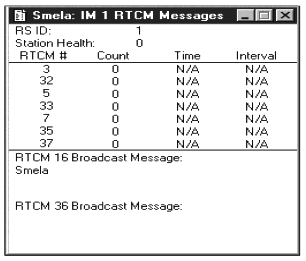
Рисунок 41
6.1.30.3 В окне IM 1 RTCM Messages подвести указатель мыши на кнопку закрытия окна и закрыть просмотровое окно IM 1 RTCM Messages.
6.1.31 Контроль и управление состоянием спутников OC (RSIM#8)
6.1.31.1 Активизировать диалоговое окно Reference Station - General RS Settings.
6.1.31.2 В диалоговом окне Reference Station - General RS Settings активизировать вкладку Satellite Health (рисунок 42).
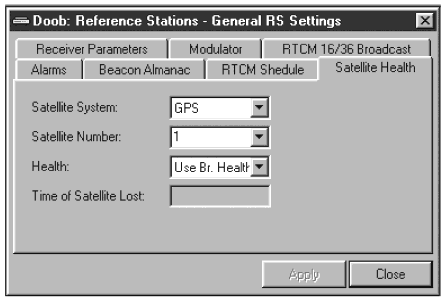
Рисунок 42
6.1.31.3 В диалоговом окне Reference Station - General RS Settings с активной вкладкой Satellite Health установить:
- спутниковую систему - GPS;
- номер спутника - любой из спутников GPS, по которому вырабатываются дифференциальные поправки;
- состояние спутника - Force Unhealty - принудительно неработоспособен.
1 Для выбора спутниковой системы GPS выполнить действия:
- подвести указатель на кнопку со стрелкой против названия Satellite System раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить строку с надписью GPS и нажать кнопку Apply.
2 Для выбора номера спутника выполнить действия:
- активизировать окно IM 1 Satellite Map (рисунок 42);
- выбрать и зафиксировать любой номер спутника, по которому вырабатываются дифференциальные поправки (ярким цветом в просмотровом окне IM 1 Satellite Map обозначены спутники по которым вырабатываются поправки);
- в диалоговом окне Reference Station - General RS Settings активизировать вкладку Satellite Health;
- в диалоговом окне Reference Station - General RS Settings с активной вкладкой Satellite Health подвести указатель на кнопку со стрелкой против названия Satellite Number раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить строку с номером зафиксированного спутника в просмотровом окне IM 1 Satellite Map и нажать кнопку Apply.
3 Для установки состояния спутника принудительно "неисправен" выполнить действия:
- в диалоговом окне Reference Station - General RS Settings с активной вкладкой Satellite Health подвести указатель на кнопку со стрелкой против названия Health раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить строку с надписью - Force Unhealty и нажать кнопку Apply.
6.1.31.4 Активизировать окно IM 1 Satellite Map и проконтролировать тусклый цвет зафиксированного спутника. Активизировать окно IM 1 Satellite Health и выполнить действия:
- в столбце SV найти номер зафиксированного спутника;
- в столбце Health против номера зафиксированного спутника контролировать сообщение Force Unhealthy (принудительно неисправен);
- в столбце Broadcast State контролировать сообщение Not Tracked (не на слежении).
6.1.31.5 Активизировать диалоговое окно Reference Station - General RS Settings с активной вкладкой Satellite Health. В диалоговом окне Reference Station - General RS Settings с активной вкладкой Satellite Health установить состояние зафиксированного спутника Force Healty (принудительно исправен).
6.1.31.6 Для установки состояния спутника принудительно работоспособен выполнить действия:
- в диалоговом окне Reference Station - General RS Settings с активной вкладкой Satellite Health подвести указатель на кнопку со стрелкой против названия Health раскрывающегося поля списка и щелкнуть мышью;
- в списке выделить строку с надписью - Force Healty и нажать кнопку Apply.
6.1.31.7 Активизировать окно IM 1 Satellite Map и контролировать яркий цвет зафиксированного спутника. Активизировать окно IM 1 Satellite Health и выполнить действия:
- в графе SV найти номер зафиксированного спутника;
- в графе Health против номера зафиксированного спутника контролировать сообщение Force Healthy (принудительно исправен);
- в графе Broadcast State контролировать сообщение Tracked (на слежении).
6.1.31.8 Активизировать диалоговое окно Reference Station - General RS Settings с активной вкладкой Satellite Health. Установить состояние зафиксированного спутника - Use Broadcast Health (исправен по бортовой информации).
6.1.31.9 Для установки состояния спутника "работоспособен по бортовой информации" выполнить действия:
- в диалоговом окне Reference Station - General RS Settings с активной вкладкой Satellite Health подвести указатель на кнопку со стрелкой против названия Health раскрывающегося поля списка и щелкнуть мышью;
- в раскрывшемся списке выделить строку с надписью - Use Broadcast Health и нажать кнопку Apply.
6.1.31.10 Активизировать окно IM 1 Satellite Health и выполнить действия:
- в графе SV найти номер зафиксированного спутника;
- в графе Health против номера зафиксированного спутника контролировать сообщение Healthy (исправен по бортовой информации);
- в графе Broadcast State контролировать сообщение Tracked (на слежении).
6.1.31.11 Активизировать диалоговое окно Reference Station - General RS Settings. Подвести указатель на кнопку "Close" и щелчком мыши закрыть диалоговое окно Reference Station - General RS Settings.
6.1.32 Контроль величины выходного сигнала MSK-модулятора
Контролировать форму и величину напряжения выходного сигнала MSK-модулятора. Для контроля формы и величины напряжения выходного сигнала MSK-модулятора выполнить действия:
- с выхода Х2 кабеля ПКАН.468543.127 осциллографом С1-112 контролировать уровень и форму выходного сигнала;
- величина выходного сигнала должна быть не менее 0,5±0,1В, форма сигнала-синусоида.
6.1.33 Проверка перезапусков БПВ ОС (RSIM#3)
6.1.33.1 Активизировать диалоговое окно RS 1 Settings.
6.1.33.2 В диалоговом окне RS 1 Settings активизировать вкладку Reset (рисунок 43).
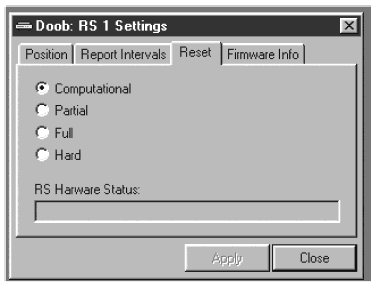
Рисунок 43
6.1.33.3 Проверка аппаратного перезапуска датчика ГНСС БПВ ОС с КС
Для проверки аппаратного перезапуска датчика ГНСС БПВ ОС с КС выполнить действия:
- на БПВ ОС включить формуляр SAT 1. В третьей, четвертой и пятой строке формуляра SAT 1 контролировать и зафиксировать значения параметров трех прогнозируемых спутников;
- в диалоговом окне RS 1 Settings c активной вкладкой Reset в селективном поле списка выбрать вариант перезапуска - Hard и щелкнуть мышью на кнопке Apply;
- на БПВ ОС контролировать автоматический тестовый контроль;
- на БПВ ОС включить формуляр SAT 1. В третьей, четвертой и пятой строке формуляра SAT 1 контролировать зафиксированные значения параметров трех прогнозируемых спутников.
6.1.33.4 Проверка аппаратного перезапуска датчика ГНСС блока приемовычислительного опорной станции с БПВ ОС
Для проверки аппаратного перезапуска датчика ГНСС БПВ ОС выполнить действия:
- на БПВ ОС включить формуляр SAT 1. В третьей, четвертой и пятой строке формуляра SAT 1 контролировать и зафиксировать значения параметров трех прогнозируемых спутников;
- на БПВ ОС включить формуляр MODE2. В первой строке формуляра MODE2 установить режим перезапуска датчика Restart GNSS: HARD;
- на БПВ ОС контролировать автоматический тестовый контроль настоящего стандарта;
- на БПВ ОС включить формуляр SAT 1. В третьей, четвертой и пятой строке формуляра SAT 1 контролировать зафиксированные значения параметров трех прогнозируемых спутников.
6.1.33.5 Проверка программного "теплого" перезапуска датчика ГНСС БПВ ОС с БПВ ОС. Для проверки программного "теплого" перезапуска датчика ГНСС БПВ ОС выполнить действия:
- на БПВ ОС включить формуляр SAT 1. В третьей, четвертой и пятой строке формуляра SAT 1 контролировать и зафиксировать значения параметров трех прогнозируемых спутников;
- на БПВ ОС включить формуляр MODE2. В первой строке формуляра MODE2 установить режим перезапуска датчика Restart GNSS: WARM;
- на БПВ ОС контролировать автоматический тестовый контроль;
- на БПВ ОС включить формуляр SAT 1. В третьей, четвертой и пятой строке формуляра SAT 1 контролировать зафиксированные значения параметров трех прогнозируемых спутников.
6.1.33.6 Проверка программного перезапуска КВУ БПВ ОС с БПВ ОС
Для проверки программного перезапуска КВУ БПВ ОС с БПВ ОС выполнить действия:
- на БПВ ОС включить формуляр SAT 1. В третьей, четвертой и пятой строке формуляра SAT 1 контролировать и зафиксировать значения параметров трех спутников;
- на БПВ ОС включить формуляр MODE2. В третьей строке формуляра MODE2 установить режим перезапуска датчика Restart KVU: ON;
- на БПВ ОС контролировать автоматический тестовый контроль;
- на БПВ ОС включить формуляр SAT 1. В третьей, четвертой и пятой строке формуляра SAT 1 контролировать зафиксированные значения параметров трех прогнозируемых спутников.
6.1.33.7 Проверка программного "холодного" перезапуска датчика ГНСС блока приемовычислительного опорной станции
Для проверки программного "холодного" перезапуска датчика ГНСС БПВ ОС с БПВ ОС выполнить действия:
- на БПВ ОС включить формуляр SAT 1. В третьей, четвертой и пятой строке формуляра SAT 1 контролировать и зафиксировать значения параметров трех прогнозируемых спутников;
- на БПВ ОС включить формуляр MODE2. В третьей строке формуляра MODE2 установить режим перезапуска датчика Restart GNSS: COLD;
- на блоке приемовычислителя ОС контролировать автоматический тестовый контроль;
- на БПВ ОС включить формуляр SAT1. Во всех строках формуляра SAT1 контролировать нулевые значения параметров всех прогнозируемых спутников.
7 Управление и контроль радиомаяка
Для управления и контроля радиомаяка необходимо вывести на дисплей диалоговое окноTransmitter (передатчик). Формат Transmitter включает в себя:
- цифровой выход управления радиомаяком - Transmitter Control;
- цифровой выход управления радиомаяком - Transmitter Status;
- аналоговый вход контроля - Analog Devices.
7.1 Управление каналами радиомаяка
7.1.1 Для управления каналами РМк предназначено диалоговое окно Transmitter Control. Открыть диалоговое окно Transmitter Control (рисунок 44).
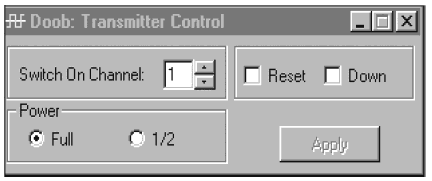
Рисунок 44
7.1.2 В диалоговом окне Transmitter Control можно переключать каналы радиомаяка, осуществлять перезапуск, выключение передатчика, устанавливать полную или половинную мощность излучения.
1 Для установки работы РМк с первого или второго канала необходимо:
- подвести указатель мыши на кнопку со стрелкой напротив названия Swich On Channel и щелчком мыши установить в окошке цифру с названием канала.
2 Для переключения РМк на работу с полной или половинной мощностью излучения необходимо:
- в поле Power щелчком мыши выделить или Full - полная мощность, или 1/2 - половинная мощность;
- нажать кнопку Apply (применить).
7.2 Установка порогов тревог РМк
7.2.1 Для установки порогов тревог РМк предназначено диалоговое окно "Аналоговые устройства". Открыть диалоговое окно - "Аналоговые устройства" (рисунок 45).
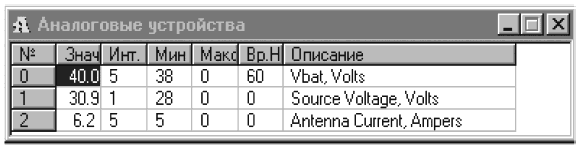
Рисунок 45
7.2.2 В диалоговом окне Аналоговые устройства устанавливаются интервалы отчетных сообщений, время наблюдения (отрезок времени, в течение которого порог должен быть нарушен, для срабатывания тревоги) и пороговые значения тревог по:
- максимальному и минимальному напряжению аккумуляторной батареи;
- максимальному и минимальному напряжению блока питания РМк;
- максимальному и минимальному току в антенне РМк.
7.3 Контроль состояния радиомаяка
Для контроля состояния РМк предназначено диалоговое окно Transmitter Status. Открыть просмотровое окно Transmitter Status (рисунок 46).
Рисунок 46
В окне Transmitter Status контролируется состояние первого и второго канала радиомаяка:
- включен - выключен;
- мощность излучения - полная или половинная;
- состояние каналов:
- нормальное, если параметры РМк не выходят за пределы порогов тревог установленных в диалоговом окне Аналоговые устройства;
- тревога, если параметры РМк выходят за пределы порогов тревог, установленных в диалоговом окне "Аналоговые устройства".
Приложение А
(справочное)
Таблица А.1 - Список переменных
Наименование | Единицы измерения | Диапазон | Тип | RSIM# |
Запрашиваемые RSIM сообщения | 1-99 | Целое число переменной длины | 1 | |
Порт назначения | 1-4 | Целое число фиксированной длины | 1 | |
Активность | 0-1 | Целое число фиксированной длины | 1 | |
Интервал выдачи | секунда | 0-99999 | Целое число переменной длины | 1 |
Время старта | UTC, с | 0-3599 | Целое число переменной длины | 1, 22 |
UTC время тревоги | час, мин, с | 000000.0-235959.99 | Фиксированный/переменный формат времени | 2, 5, 17 |
Нераспознанные RSIM# сообщения | RSIM# | 1-46 | Целое число переменной длины | 2 |
Команды перезапуска | D/P/F | Фиксированные буквы | 3 | |
Интервал архивирования | с | 0-99999 | Целое переменной длины | 4 |
ASCII-текст диагностики | <257 символов | Текст переменной длины | 5 | |
Идентификационный номер ОС | 0-1023 | Целое число переменной длины | 6, 17, 20, 21, 23 | |
Опорный генератор | I/E | Фиксированные буквы | 6 | |
Эталонные координаты - широта | градус, минута | 0000.000000-9000.00000 | Поля фиксированной и переменной длины | 6 |
Частота внешнего опорного генератора | MHz | 1.00-21.00 | Число с плавающей запятой | 6 |
Север/Юг | N/S | Фиксированные буквы | 6 | |
Эталонные координаты - долгота | градус, минута | 00000.000000-18000.000000 | Поля фиксированной и переменной длины | 6 |
Запад/Восток | W/E | Фиксированные буквы | 6 | |
Высота над эллипсоидом | метр | 9999.999 до +9999.999 | Число с плавающей запятой со знаком | 6 |
Минимальный угол возвышения | градус | 0.0-90.0 | Число с плавающей запятой | 6 |
Максимальный возраст поправок | секунда | 0.0-999.0 | Число с плавающей запятой | 6 |
Число посылок в сообщении | 1-4 (n) | Целое число фиксированной длины | 7, 13, 19, 21 | |
Номер посылки | 1-4 (n) | Целое число фиксированной длины | 7, 13, 19, 21 | |
Время обсервации UTC | час, минута, секунда | 000000.00-235959.99 | Фиксированный/переменный формат времени | 7 |
Номер спутника | 1-32 (65-96) или 99 | Целое число переменной длины | 7, 8, 13, 19 | |
Азимут | градус | 0.0-360.0 | Число с плавающей запятой | 7 |
Угол возвышения | градус | 0.0-90.0 | Число с плавающей запятой | 7 |
Отношение С/Ш | дБ | Число с плавающей запятой | 7 | |
URA | метр | Число с плавающей запятой | 7 | |
Работоспособность НКА | 0-63 | Целое число переменной длины | 7 | |
Код управления пригодностью спутника | 0-2 | Целое число фиксированной длины | 8 | |
Время (UTC) перехода спутника в неисправное состояние | час, минута, секунда | 000000.0-235959.9 | Фиксированный/переменный формат времени | 8 |
Состояние спутника | 0-9 | Целое число фиксированной длины | 9 | |
Канал радиомаяка | 1-2 | Целое число фиксированной длины | 10 | |
Частота | кГц | 283.5-325 | Число с плавающей запятой | 10, 21 |
Режим работы опорной станции | 0-3 | Целое число фиксированной длины | 10 | |
Скорость передачи | бод | 25-300 | Целое число переменной длины | 10, 14, 2, 1 |
Тип синхронизации | 0-1 | Целое число фиксированной длины | 10, 14, 2, 1 | |
Кодирование передачи | 0-1 | Целое число фиксированной длины | 10, 14, 21 | |
Идентификатор радиомаяка | <5 символов | Текст переменной длины | 10 | |
Порог тревоги по числу спутников | 0-9 | Целое число фиксированной длины | 11 | |
Порог тревоги по значению поправки псевдодальности | метр | 0.0-10485.5 | Число с плавающей запятой | 11 |
Порог тревоги по значению скорости изменения поправки псевдодальности | м/с | 0.0-4.1 | Число с плавающей запятой | 11 |
Порог тревоги по времени ожидания обратной связи от СИК | секунда | 0.0-99999.9 | Число с плавающей запятой | |
Тревога по числу видимых спутников | I/S | Фиксированные буквы | 12 | |
Тревога: неконтролируемая передача | F/W/U/M | Фиксированные буквы | 12 | |
Тревога: большое значение PRC | H/N | Фиксированные буквы | 12 | |
Тревога: большое значение RRC | H/N | Фиксированные буквы | 12 | |
UTC время сообщения | час, минута, секунда | 000000.0-235959.9 | Фиксированный/Переменный формат времени | 13 |
RRC | м/с | минус 4.064 до плюс 4.064 | Число с плавающей запятой | 13 |
PRC | м | минус 10485.44 до плюс 10485.44 | ||
UDRE | м | 0.0-99.9 | Число с плавающей запятой | 13 |
RTCM модифицированный Z-отсчет | секунда, GPS | 0.0-3599.4 | Число с плавающей запятой | 13, 23 |
Возраст данных | 0-255 | Целое число переменной длины | 13 | |
Контролируемая частота радиомаяка | кГц | 283.5-325 | Число с плавающей запятой | 14 |
Уровень сигнала | ДБ/мкВ/м | 0.0-999.9 | Число с плавающей запятой | 15 |
Отношение сигнал/шум | дБ | 0.0-999.9 | Число с плавающей запятой | 15 |
Относительное число ошибочных сообщений | 0.00-1.00 | Число с плавающей запятой | 15 | |
Средний возраст поправок | секунда | 0.00-999.9 | Число с плавающей запятой | 15 |
Порог тревоги: возраст поправок | секунда | 0.0-999.9 | Число с плавающей запятой | 16 |
Порог тревоги: большое число ошибочных сообщений | 0.00-1.00 | Число с плавающей запятой | 16 | |
Интервал наблюдения числа ошибочных сообщений | секунда | 0.0-99999.9 | Число с плавающей запятой | 16 |
Порог тревоги: отношение сигнал/шум РМК | дБ | 0.0-999.9 | Число с плавающей запятой | 16 |
Интервал наблюдения С/Ш | секунда | 0.0-99999.9 | Число с плавающей запятой | 16 |
Порог тревоги: уровень сигнала РМК | дБ/мкВ/м | 0.0-999.9 | Число с плавающей запятой | 16 |
Интервал наблюдения уровня сигнала РМК | секунда | 0.0-99999.9 | Число с плавающей запятой | 16 |
Порог тревоги числа спутников на слежении | 0-9 | Целое число фиксированной длины | 16 | |
Интервал наблюдения числа спутников на слежении | секунда | 0.0-99999.9 | Число с плавающей запятой | 16 |
Порог HDOP | 0.0-99.9 | Число с плавающей запятой | 16 | |
Интервал наблюдения HDOP | секунда | 0.0-99999.9 | Число с плавающей запятой | 16 |
Порог горизонтальной ошибки места | метр | 0.0-999.9 | Число с плавающей запятой | 16 |
Интервал наблюдения горизонтальной ошибки места | секунда | 0.0-99999.9 | Число с плавающей запятой | 16 |
Порог остаточной погрешности псевдодальности | метр | 0.0-99.9 | Число с плавающей запятой | 16 |
Интервал наблюдения остаточной погрешности псевдодальности | секунда | 0.0-99999.9 | Число с плавающей запятой | 16 |
Порог остаточной погрешности псевдоскорости | м/с | 0.0-9.9 | Число с плавающей запятой | 16 |
Интервал наблюдения остаточной погрешности псевдоскорости | секунда | 0.0-99999.9 | Число с плавающей запятой | 16 |
Порог тревоги: низкая дифференциальная точность потребителя | 0.0-9.99 | Число с плавающей запятой | 16 | |
Интервал наблюдения низкой дифференциальной точности потребителя | секунда | 0.0-99999.9 | Число с плавающей запятой | 16 |
Интервал наблюдения возраста поправок | секунда | 0.0-99999.9 | Число с плавающей запятой | 16 |
Тревога: большое число ошибочных сообщений | H/A | Фиксированные буквы | 17 | |
Тревога: низкое отношение С/Ш | L/A | Фиксированные буквы | 17 | |
Тревога: низкий уровень сигнала | Z/L/A | Фиксированные буквы | 17 | |
Тревога: недостаточное число спутников на слежении | Z/L/A | Фиксированные буквы | 17 | |
Тревога: низкое значение (HDOP) | H/A | Фиксированные буквы | 17 | |
Тревога: большая горизонтальная ошибка местоположения | H/A | Фиксированные буквы | 17 | |
Тревога: большая остаточная погрешность псевдодальности | H/A | Фиксированные буквы | 17 | |
Тревога: большая остаточная погрешность псевдоскорости | H/A | Фиксированные буквы | 17 | |
Тревога: низкое значение UDRE | L/A | Фиксированные буквы | 17 | |
Время обсервации UTC | час, минута, секунда | 000000.0-235959.99 | Фиксированный/Переменный формат времени | 18 |
Ошибка по широте | метр | 0.0-9999.9 | Число с плавающей запятой | 18 |
Ошибка по долготе | метр | 0.0-9999.9 | Число с плавающей запятой | 18 |
Число спутников, использованных для определения места | 0-24 | Целое число переменной длины | 18 | |
PDOP | 0.0-99.9 | Число с плавающей запятой | 18 | |
HDOP | 0.0-99.9 | Число с плавающей запятой | 18 | |
VDOP | 0.0-99.9 | Число с плавающей запятой | 18 | |
Остаточная погрешность псевдодальности | метр | 0.0-99.99 | Число с плавающей запятой | 19 |
Остаточная погрешность псевдоскорости | 0.0-9.99 | Число с плавающей запятой | 19 | |
Индикатор качества коррекции | метр | 0.0-99.99 | Число с плавающей запятой | 19 |
Оценка дисперсии | М | 0.0-99.9 | Число с плавающей запятой | 19 |
Возраст поправки | секунда | 0.0-999.9 | Число с плавающей запятой | 19 |
Флаг местоположения | 0-2 | Целое число фиксированной длины | 20 | |
Флаг остаточной псевдодальности | 0-32, 65-96 | Целое число переменной длины | 20 | |
Широта | градус, минута | 0000.0-9000.0 | Фиксированный/Переменная длина | 21 |
Север/Юг | N/S | Фиксированные буквы | 21 | |
Долгота | градус, минута | 00000.0-18000.0 | Фиксированный/Переменная длина | 21 |
Запад/Восток | W/E | Фиксированные буквы | 21 | |
Дальность действия радиомаяка | километр | 0.0-500.0 | Целое число переменной длины | 21 |
Состояние радиомаяка | 0-3 | Целое число фиксированной длины | 21 | |
Метод формирования поправок | 1-3 (1-6) | Целое число фиксированной длины | 22 | |
Тип RTCM сообщения | 1-64 | Целое число переменной длины | 22 | |
Интервал | секунда | 0.0-86400.0 | Число с плавающей запятой | 22 |
Передаваемые RTCM сообщения | 1-64 | Целое число переменной длины | 23 | |
Текущий номер RTCM сообщения | 0-7 | Целое число фиксированной длины | 23 | |
Длина RTCM сообщения | слово | 0-31 | Целое число переменной длины | 23 |
Состояние опорной станции | 0-7 | Целое число фиксированной длины | 23 | |
RTCM - слово | 0-16777215 | Целое число переменной длины | 23 | |
Выходная мощность РМк | Ватт | 0-99999.0 | Число с плавающей запятой | 24 |
Излучаемая мощность РМк | Ватт | 0-99999.0 | Число с плавающей запятой | 24 |
Напряжение источника питания | Вольт | 0-999.0 | Число с плавающей запятой | 24 |
Сила тока источника питания | Ампер | 0-99.0 | Число с плавающей запятой | 24 |
Рабочий полукомплект | A, B | Фиксированные буквы | 24 | |
Перезапуск процессора передатчика | Пустое поле | 24 | ||
Источник питания | AC, DC | Фиксированные буквы | 24 | |
Возможность автоматического переключения полукомплектов | 0, 1 | Фиксированные буквы | 24 |
Библиография
[1] | Международная Конвенция по охране человеческой жизни на море, СОЛАС, Глава V. Безопасность мореплавания | |
[2] | Стандарт RTCM. Версия1.0 | Рекомендуемый стандарт для NAVSTAR/GPS. Опорная станция, станция интегрального контроля, версия 1.0 |
________________ * Доступ к международным и зарубежным документам, упомянутым в тексте, можно получить, обратившись в Службу поддержки пользователей. - . | ||
[3] | Рекомендации MCЭ-R.M.823 | Технические характеристики передачи дифференциальных поправок в глобальной навигационной спутниковой системе (ГНСС) в диапазоне частот морских радиомаяков 285-325 кГц |
[4] | МЭК 61162-2 | Цифровые интерфейсы для судового навигационного и связного оборудования и систем |
[5] | Стандарт RTCM. Версия 2.3 | Дифференциальные поправки для ДГЛОНАСС/DGPS, версия 2.3 |
[6] | Стандарт NMEA 0183 | Стандарт национальной морской ассоциации для сопряжения с внешним навигационным оборудованием |
[7] | Спецификация сигнала GPS | Стандартный режим работы (SPS) |
[8] | Интерфейсный контрольный документ | Глобальная навигационная спутниковая система ГЛОНАСС |
[9] | Интерфейсный контрольный документ | Европейская ГНСС ГАЛИЛЕО. Открытая служба (OS) |
[10] | Резолюция ИМО MSC.233(82) | Принятие эксплуатационных требований к судовому приемному оборудованию системы ГАЛИЛЕО |
[11] | ASCI Х3.15(5) | Американский национальный стандарт, устанавливающий правила передачи данных по последовательному порту |
[12] | МСЭ - T.V.28 | Стандарт, определяющий формат связей по порту RS 232 |
[13] | МСЭ - T.V.11 | Стандарт, определяющий формат связей по порту RS 422 |
Электронный текст документа
и сверен по:
, 2013
{kind=link}