ФЕДЕРАЛЬНОЕ АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ

ПРЕДВАРИТЕЛЬНЫЙ ПНСТ НАЦИОНАЛЬНЫЙ --СТАНДАРТ
2015/МЭК 61362(2012)
СИСТЕМЫ РЕГУЛИРОВАНИЯ ГИДРАВЛИЧЕСКИХ
ТУРБИН
Руководство по составлению технических условий
IEC 61362(2012)
Guide to specification of hydraulic turbine governing systems
(IDT)
Издание официальное
Москва
Стандартинформ
2015
ПНСТ 49—2015
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным унитарным предприятием «Всероссийский научно-исследовательский институт стандартизации и сертификации а машиностроении» (ВНИИНМАШ) и Открытым акционерным обществом «Научно-исследовательский институт энергетических сооружений» (ОАО «НИИЭС») на основе собственного аутентичного перевода на русский язык международного документа, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 330 «Процессы, оборудование и энергетические системы на основе возобновляемых источников энергии»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 23 июня 2015 г. № 24-пнет
4 Настоящий стандарт идентичен международному документу МЭК 61362(2012) «Руководство по составлению технических условий» [IEC 61362(2012) «Guide to specification of hydraulic turbine governing systems»].
Наименование настоящего стандарта изменено относительно наименования указанного международного документа для приведения в соответствие с ГОСТ Р 1.5 (пункт 3.5).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные стандарты Российской Федерации и действующие в этом качестве межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта и проведения его мониторинга установлены в ГОСТ Р 1.16-2011 (разделы 5 и 6).
Федеральное агвнтстео по техническому регулированию и метрологии собирает сведения о практическом применении настоящего стандарта. Данные сведения, а также замечания и предложения по содержанию стандарта можно направить не позднее чем за девять месяцев до истечения срока его действия разработчику настоящего стандарта по адресу: 123007, г. Москва, ул. Шеногина. д. 4 и в Федеральное агентство по пюхничвекому регулированию и метрологии по адресу: Ленинский проспект, д. 9. Москва В-49. ГСП-1. 119991.
В случае отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе «Национальные стандарты» и журнале «Вестник технического регулирования». Уведомление будет размещено также на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
© Стандартинформ. 2015
Настоящий стандарт не может быть полностью или частично воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Федерального агентства по техническому регулированию и метрологии
II
ПНСТ 49—2015
Содержание
1 Область применения....................................................................................................................................1
2 Нормативные ссылки....................................................................................................................................1
3 Термины, определения, обозначения и сокращения.................................................................................2
4 Структуры управления.................................................................................................................................9
5 Производительность и компоненты управляющих систем......................................................................13
6 Применение рекомендаций.......................................................................................................................28
Приложение А (обязательное) Упрощенные дифференциальные уравнения и передаточные
функции идеализированных ПИД-регуляторов.................................................................36
Приложение В (справочное) Сетевое регулирование частоты..................................................................37
Приложение С (справочное) Экстренное отключение и аварийное отключение.....................................39
Приложение ДА (справочное) Сведения о соответствии ссылочных международных стандартов национальным стандартам Российской Федерации и действующим в этом качестве межгосударственным стандартам........................................................42
III
ПНСТ 49—2015
ПРЕДВАРИТЕЛЬНЫЙ НАЦИОНАЛЬНЫЙ СТАНДАРТ
СИСТЕМЫ РЕГУЛИРОВАНИЯ ГИДРАВЛИЧЕСКИХ ТУРБИН Руководство по составлению технических условий Hydraulic turbine governing systems. Guide to specification
Срок действия— с 2016—07—01 no 2019—07—01
1 Область применения
Настоящий стандарт содержит технические данные, необходимые для описания систем управле-ния гидравлическими турбинами и режима их работы. Он предназначен для облегчения выбора пара* метров, которые указываются в технических требованиях и технических предложениях.
Область применения настоящего стандарта ограничена управлением турбинами. В стандарте сделаны некоторые замечания об управлении на уровне станции, первичном и вторичном регулиро* вании частоты (см. также приложение В), которые не претендуют на полноту описания, а лишь дают общее представление об этих системах для лучшего понимания места систем управления турбиной.
В настоящем стандарте рассмотрены объекты стандартизации:
• управление скоростью, мощностью, уровнем воды, открытием направляющего аппарата и рас* ходом воды активных и реактивных турбин, включая турбины двойного регулирования (поворотно-лопастные);
• средства преобразования энергии;
• устройства аварийного отключения и т.д.
Для облегчения подготовки технических требований к оборудованию, в руководстве также содержатся спецификации, которые должны быть заполнены заказчиком и поставщиком на различных стадиях выполнения проекта и контракта.
Руководство состоит из следующих разделов:
• основные требования к электромеханическому оборудованию малых гидроэлектростанций (ГЭС);
• технические спецификации электромеханического оборудования, исключая габаритные размеры и стандартные ряды;
• требования по аттестации, эксплуатации и обслуживанию.
См. также МЭК 60308.
2 Нормативные ссылки
8 настоящем стандарте использованы нормативные ссылки на следующие стандарты:
МЭК 60050-351:2013 Международный электротехнический словарь. Часть 351. Технология управления (IEC 60050*351:2013, International Electrotechnical Vocabulary — Part 351: Control technology)
МЭК 60068-2-6:2007 Испытания на воздействие внешних факторов. Часть 2: Испытания. Испытание Fc: Вибрация (синусоидальная) (IEC 60068-2-6:2007. Environmental testing — Part 2-6: Tests — Test Fc: Vibration (sinusoidal)
Издание официальное
1
ПНСТ 49—2015
МЭК 60068-2-27:2008 Испытания на воздействие внешних факторов. Часть 2. Испытания. Часть 2-27: Испытания. Испытание Еа и руководство: Удар (IEC 60068*2-27:2008, Environmental testing — Part 2*27: Tests — Test Ea and guidance: Shock)
МЭК 60308:2005 Системы, регулирующие скорость вращения гидравлических турбин. Международные нормы на правила испытаний (IEC 60308:2005, Hydraulic turbines — Testing of control systems)
МЭК 61000-4-1:2006 Электромагнитная совместимость (ЭМС). Часть 4-1. Методики испытаний и измерений. Общий обзор серии стандартов МЭК 61000-4 (IEC 61000-4-1:2006, Electromagnetic compatibility (EMC) — Part 4-1: Testing and measurement techniques — Overview of IEC 61000-4 series)
ИСО 8448:1992 Материалы смазочные жидкие индустриальные. Классификация вязкости по ИСО (ISO 3448:1992. industrial liquid lubricants; ISO vicosrty classification)
СИСПР 11:2009 Промышленные, научные, медицинские и бытовые высокочастотные устройства. Радиопомехи индустриальные. Нормы и методы измерений (CISPR 11:2009. Industrial, scientific and medical equipment — Radio-frequency disturbance characteristics — Limits and methods of measurement)
3 Термины, определения, обозначения и сокращения
3.1 Термины и определения
В настоящем стандарте применены по МЭК 60050-351, а также следующие термины с соответ* ствующими определениями:
Примечание — В приложении А для пояснения приведены уравнения и передаточные функции идеализированных пропорционалъно-интегрально-дифферекциальных регуляторов (ПИД-регуляторов).
3.1.1 система управления турбиной: Оборудование, управляющее пуском (лопатки направляющего аппарата, лопасти рабочего колеса, игла, положение отсекателя) гидравлических турбин.
Примечание — В настоящее время система управления турбиной состоит из двух частей: управление гидроприводом и управление электронными компонентами.
3.1.2 агрегатный уровень управления: Функции управления отдельным гидроагрегатом (турбина. генератор, вспомогательное оборудование), включая управление скоростью вращения, активной мощностью, уровнем воды, открытием, расходом воды.
Примечание — В настоящем стандарте рассматриваются задачи агрегатного уровня управления. Некоторые замечания о задачах станционного уровня управления и о первичном и вторичном регулировании частоты приведены в приложении В.
3.1.3 станционный уровень управления: Функции управления, осуществляемые на станционном уровне и связанные с управлением несколькими или всеми агрегатами станции, задающей параметры управления системе агрегатного уровня.
Примечание — При автоматическом управлении агрегатом и станцией система управления турбиной получает управляющие воздействия от вышестоящих уровней управления.
3.1.4 уровень управления энергосистемой: Функции управления, осуществляемые для управления электрической сетью.
Примечание — При необходимости система управления турбиной участвует в первичном и/или вторичном регулировании частоты энергосистемы (см. приложение В).
3.1.5 дифференциальное уравнение: Уравнение, описывающее динамику поведения системы на определенном временном интервале времени (см. приложение А).
3.1.6 отклик системы: Реакция системы (изменение выходного сигнала) на изменение входного сигнала.
3.1.7 частотный отклик: Отклик на синусоидальный входной сигнал линеаризованной системы, определенный при решении дифференциального уравнения с помощью преобразования Фурье.
3.1.8 передаточная функция: Отклик на синусоидальный входной сигнал линеаризованной системы. определенный при решении дифференциального уравнения с помощью преобразования Лапласа.
3.2 Индексы и сокращения
г — индекс номинального режима работы:
max / min — индекс наибольшего и наименьшею значений переменной;
2
ПНСТ 49—2015
д — символ отклонения параметра от установившегося значения: да — индекс направляющего аппарата турбины: ги — индекс рабочего колеса турбины; пе — индекс иглы (для ковшовых турбин); de — индекс отсекателя (дефлектора);
НА — направляющий аппарат.
3.3 Обозначения и определения используемых понятий
Удельная энергия Е, Дж/кг — энергия воды, проходящей через турбину, отнесенная к ее массе; Напор Н. м — Н-Е/д, где д - 9.61 м/с2:
Расход Q. м3/с — объем воды, протекающий через живое сечение в единицу времени;
Скорость вращения л. с'1 — число оборотов турбины в единицу времени;
Частота /. Гц — число полных циклов изменения тока в секунду;
Выходная мощность генератора PG. Вт — мощность генератора, измеряемая агрегатным счетчиком электроэнергии;
Момент инерции /. кгм2 — момент инерции / - где — масса рабочею колеса; R^ —
радиус рабочего колеса;
Открытие НАа,) мм — кратчайшее расстояние между соседними лопатками НА или угол поворота лопаток НА гидравлической турбины от закрытого положения;
Ход штока сервомотора НА S. м — перемещение поршня сервомотора
Постоянная времени сервомотора Ту, с — характеристика инерционности сервомотора;
Объем сервомотора Vc, м3 — объем масла для заполнения сервомотора;
Отклик системы — реакция системы (изменение выходного сигнала) на изменение входною сигнала.
Термин | Определение | Символ |
Управляемая пере- | Переменная, по которой происходит управление, например, скорость v. выход- | |
менная | ная мощность Pq, уровень воды h, открытие сервомотора у. расход О: | |
- абсолютное значение | X | |
- относительное отклонение от абсолютного значения х =ДХ/Х | X | |
- скорость вращения | Хп | |
- выходная мощность | *Р | |
- уровень воды | *h | |
- отхрытие | Ху | |
- расход | *q | |
Термин | Определение | Символ |
Команда (упрэвля- | Сигнал, полученный от системы управления высшего уровня: | |
ющий сигнал) | - абсолютное значение: | С |
- относительное отклонение от абсолютного значения, с =ДС/С; | С | |
- скорость вращения; | Сп | |
• выходная мощность. | СР | |
• уровень воды; | Ch | |
- открытие: | ||
• расход | _fg_ |
3
ПНСТ 49—2015
Тернии | Определение | Символ |
Ход поршня сервомотора. м | Ход поршня главного сервомотора, который перемещает лопагхи/иглы/ отсека-тели/ лопасти: - абсолютная величина: - относительное отклонение от абсолютной величины, у = дУ/Утах Примечание — Максимальный ход сервомотора Угпах определяется в договоре поставки. | У У |
Термин | Определение | Символ |
Диапазон изменения управляемой переменной | Диапазон регулирования управляемой переменной (скорость вращения в управлении скоростью или уровень воды в управлении уровнем) со средним остаточным стагизмом (см. 5.3.2): • максимальное значение управляемой переменной для Y/Ymax = 0: • минимальное значение управляемой переменной для У/Ут** = 1.0. см. рисунок 1 |

Термин | Определение | Символ |
Выходной сигнал электронного регулятора | Выходной сигнал электронного регулятора, равный входному сигналу золотника сервомотора. Относительное отклонение от установившейся величины | S |
Выходной сигнал главного золотника | Выходной сигнал главного золотника, равный входному сигналу главного сервомотора. Относительное отклонение от установившейся величины | S V |
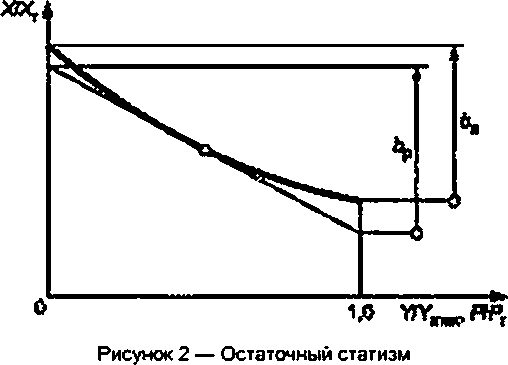
График статизма | График, показывающий зависимость управляемой переменной (скорость п/п, или уровень воды И/И,) от относительного хода штока сервомотора или относительной выходной мощности при установившихся условиях, см. рисунок 2 |
4
ПНСТ 49—2015
Тернии | Определение | Символ |
Остаточный статизм. % | Крутизна спада графика (см. рисунок 2): - в заданной точке: • определенная конечными значениями стзтизма | к |
Коэффициент пропорционального действия | Коэффициент пропорциональности, между пошаговым откликом идеализированного ПИД-регулятора при 6р » 0. Kq ■ 0 и входным сигналом х =1. см. рисунок 3 | _!Ь>_ |
8imw УПИН*П1пыр<**ен1)
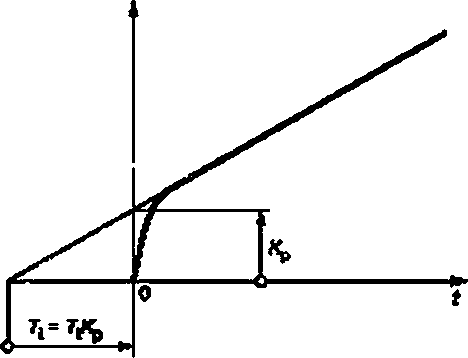
Рисунок 3 — Коэффициент пропорциональности действия и интегральное время действия
Терпим | Определение | Символ |
Постоянная интегрирования | Постоянная времени интегрирования идеализированного ПИД-регулятора. Время сброса Г(1 с. в параллельных структурированных ПИД-регулягорах определяется Г = Tj-Kp и Кр/Т1 соответствует наклону кривой пошагового отклика регулятора Ьр « 0. Kq =0 и входному сигналу х = 1. см. рисунок 3. Примечание — Время сброса определяется как Г = Kp/Kt с коэффициентом К, = 1/7", | Г. |
5
ПНСТ 49—2015
Термин | Определение | Смывал |
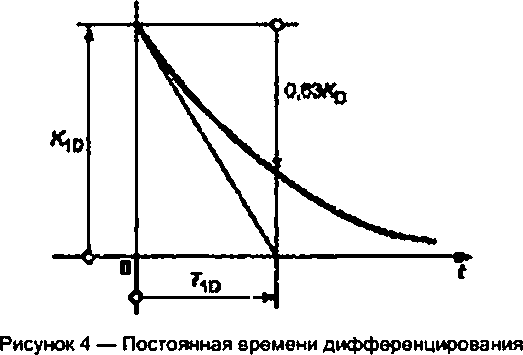
Постоянная дифференцирования | Постоянная времени дифференцирования идеализированного ПИД-регулятора. Передаточная функция Г0 - р может фактически быть определена только приблизительно передаточной функцией DT^ т.в. производной переменной, умноженной на задержку элементов первого порядка «ю 'То Р 1 + 7Io Р Пошаговый отхпик идеализированного ПИД-рвгулятора с такой передаточной функцией (пропорциональная и интегральная составляющие равны нулю), как показано на рисунке 4. Для малых величин Г|&, с. применяют приближение: Г0 = К0 Тю. Примечание — Расчетное время в параллельных структурированных ПИД-регуляторах определяется как 7d = К^К с производным коэффициентом действия Kq = Гр. | Го |
а яп и У (регулировал* ОТ|)
Термин | Определение | Символ |
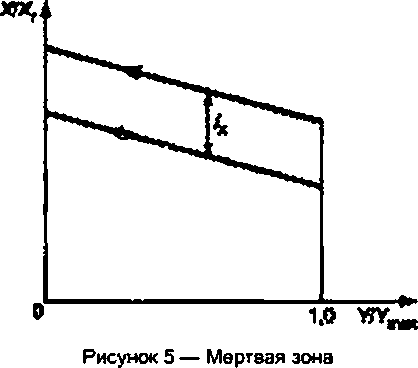
Мертвая зона | Максимальная разница между двумя значениями управляемой переменной. которая не вызывает управляющего воздействия, см. рисунок 5 | |
Зона нечувствительности | Половина мертвой зоны | •х'2 |
б
ПНСТ 49—2015
Термин | Определение | Симеон |
Минимальное время огхрытия/закрытия сервомотора | Время открытия/закрытия, с, для полного перемещения штока сервомотора при максимальной скорости без учета времени демпфирования, см. рисунок 6 Примечание — Минимальное время открытия/закрытия сервомотора определяется в результате расчетов гидравлических переходных процессов. |
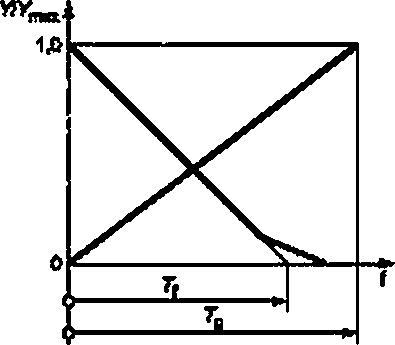
Рисунок 6 — Минимальное время открытия'закрыгия сервомотора
Термин | Определение | Симаол |
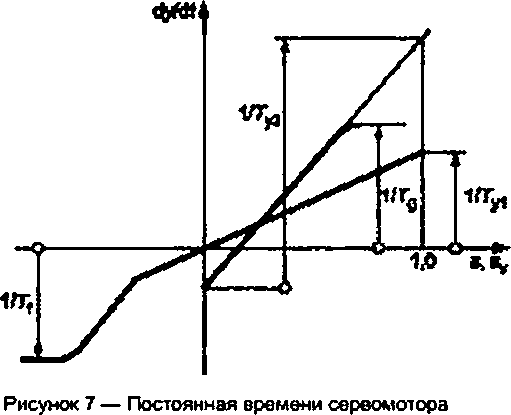
Постоянная времени сервомотора, с | 7$ или У (поведение ОГ,) обратная величина наклона кривой, показывающая скорость сервомотора бу/dt в зависимости от относительного отклонения управляющего клапана s. sv от нулевого положения, по отношению к s. ву « 1 (s. Sy « 1 относительное перемещение штока при отсутствии обратной связи), см. рисунок 7 | ГУ |
Термин | Определение | Символ |
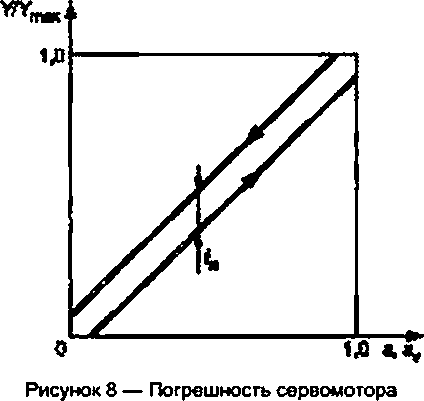
Погрешность сервомотора | Максимально возможная разница в положении штока сервомотора при одинаковых значениях входного сигнала, см. рисунок 8 | 'д |
7
ПНСТ 49—2015
Термин | Определение | Символ |
Мертвое время, с (запаздывание) системы управления | Интервал времени между изменением скорости или получением управляющего сигнала и моментом сграгивания (начала движения) сервомотора, см. рисунок 9 |
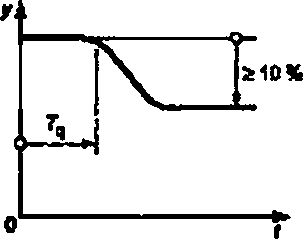
Рисунок 9 — Мертвое время системы управления
Термин | Определение | Символ |
Энергия срабатывания. Нм | Необходимая энергия для перемещения штока сервомотора при минимально необходимом давлении рд = EpiV$ | Er |
Объем сервомотора, м3 | Объем масла в сервомоторе | |
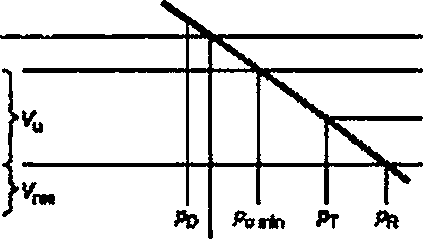
Объем масла в точке отключения, м3 | Объем масла в маслонапорной установке в точке отключения между Рт и Pr. см. рисунок 20 | |
Объем масла, м3 | Объем масла при изменении давления между р ^ и р%. см. рисунок 20 | к |
Остаточный (не пригодный) объем масла, м3 | Объем масла в маслонапорной установке в точке отключения после отключения предельной нагрузки, см. рисунок 20 | V™ |
Проектное давление масла. Па | Проектное давление масла | Pd |
Рабочее давление масла. Па | Рабочее давление масла при нормальных условиях работы | Ро |
Давления масла отключения. Па | Отключение возможно, когда давление масла pj достигнуто, т. е. PR<PT<PO<PD | Рт |
Минимальное рабочее давление. Па | Минимальное давление масла в сервосистеме | PR |
8
ПНСТ 49—2015
4 Структуры управления
4.1 Общие положения
При управлении гидравлическими турбинами выполняются различные задачи, имеющие раз* ные приоритеты выполнения. Опыт построения таких систем позволяет построить некоторые типовые структуры систем управления, в которых учтено выполнение основных правил управления.
4.2 Основные функции управления
4.2.1 Общее
8 управлении гидравлическими турбинами могут быть выделены следующие основные функции:
• регулирование скорости вращения:
• регулирование выходной мощности;
• управление открытием направляющего аппарата;
• управление уровнем воды;
• управление расходом воды.
Иногда эти функции управления комбинируются.
4.2.2 Регулирование скорости вращения
Регулирование скорости вращения обеспечивает поддержание постоянной частоты электрического тока, в различных режимах работы это означает что:
• в изолированных системах с одним агрегатом (малая сеть) фактическая скорость (и. следовательно. частота) соответствует управляющему сигналу; в изолированных системах больше, чем с одним агрегатом (средняя сеть), регулирование скорости ведется с остаточным статизмом для исключения колебаний между работающими агрегатами;
• при работе на мощную сеть, когда скорость вращения определяется частотой сети, регулирование скорости способствует регулированию частоты в сети посредством изменения динамических свойств управляемой системы с остаточным статизмом;
• при пуске агрегата в режим холостого хода генератора (перед синхронизацией и после отключения от сети) фактическая скорость изменяется по команде и соответствует частоте сети с небольшим отклонением.
4.2.3 Регулирование выходной мощности
Регулирование выходной мощности отдельным регулятором мощности применяется в агрегатах, работающих параллельно с сетью. Цепь регулирования — сохранять выходную мощность агрегата постоянной независимо от колебаний напора. Изменение частоты влияют на мощность посредством остаточного статизма. Нарушение баланса мощности генерации и потребления вызывает пропорциональное изменение частоты.
Если регулирование скорости вращения не зависит от колебаний напора, и регулирование мощности происходит в замкнутом контуре управления, регулятор мощности не требуется. В этом случае достаточно вычислить величину требуемого открытия путем линеаризации (4.3.2). В этом случае также изменения частоты влияют на уровень мощности посредством остаточною статизма.
4.2.4 Управление открытием направляющего аппарата
Управление открытием направляющего аппарата также как последующее регулирование параметров агрегата (например, регулирование скорости) или параметров режима сети определяется открытием сервомотора по команде на открытие. Регулирование параметров режима сети ведется с постоянным статизмом по скорости, который согласует частоту сети с открытием сервомотора вокруг значения открытия, заданного системой управления агрегатом; это — альтернативное решение по регулированию мощности с учетом частоты, которое предпочтительно при использовании современных цифровых регуляторов.
4.2.5 Управление уровнем воды
На русловых гидроэлектростанциях часто требуется поддерживать уровень воды в верхнем бьефе постоянным или изменяющимся в заданном диапазоне вокруг постоянного значения. Управление уровнем веды обычно ведется внешней системой управления мощностью электростанции, но при отсутствии регулирования частоты энергосистемы может осуществляться и системой регулирования частоты (и мощности) турбины.
При внешнем управлении уровнем веды регулятор уровня работает как вторичный регулятор.
Он сравнивает измеренные значения уровня воды с заданным значением (предельными значениями)
9
ПНСТ 49—2015
уровня и на основе определенного алгоритма дает команду системе регулирования турбины (регулирование скорости, открытия или мощности). При участии агрегата в регулировании частоты энергосистемы нужно, чтобы постоянная времени регулирования уровня воды соответствовала постоянной времени регулирования частоты по сетевому стандарту, поддерживаемому системным оператором.
При регулировании уровня воды непосредственно на станции измерение уровня сравнивается с заданным значением уровня или предельными значениями уровня, а команда передается сервомотору или ограничителю открытия направляющего аппарата. На многоагрегатных станциях статизм открытия (5.3.2) учитывается на каждом шаге управления для установки рабочей точки каждого агрегата.
4.2.6 Управление расходом воды
Для гидроэлектростанций с водохранилищами, особенно при каскадной схеме использования реки (5.16.4) требуется управление расходом воды через турбины электростанции. Система управления расходом воды может быть реализована на уровне управления электростанцией или на уровне управления агрегатом.
В обоих случаях регулятор расхода воды сравнивает текущее значение расходе воды с заданным, и по определенному алгоритму формирует команду системе управления турбиной (по скорости, открытию или мощности). В общем случае расход воды не измеряется, а вычисляется с использованием характеристик разворота лопастей рабочего колеса турбины (для поворотно-лопастных или капсульных турбин) или по открытию направляющего аппарата (положению иглы у ковшоеых турбин) в зависимости от измеренного напора агрегата. Для ковшовых турбин расход вычисляется по положению каждой иглы и измеренному напору.
При участии агрегата в регулировании частоты энергосистемы нужно, чтобы постоянная времени регулирования расхода воды была достаточно большой, чтобы обеспечить первичное регулирование частоты по сетевому стандарту, поддерживаемому системным оператором. В этом случае управление расходом воды можно осуществлять по разнице заданного и вычисленного фактического значения расхода. не определяя постоянных времени регулятора по расходу.
4.3 Конфигурации комбинированных систем управления
4.3.1 Общее
В комбинированных системах каждая функция управления может осуществляться отдельным регулятором. Однако все регуляторы приводят в действие один и тот же главный золотник сервомотора посредством открытия его на заданное значение. Переключение режима должно происходить без толчков. Параметры отдельных регуляторов должны быть согласованы в соответствующем контуре управления. Регулирование уровня воды и выходной мощности и од. не всегда совместимы с регулированием частоты при работе в изолированной энергосистеме. Регулятор скорости должен обеспечивать безопасность при. например, отключении нагрузки.
4.3.2 Параллельные структуры
Параллельно включенные регуляторы приводят в действие один или несколько сервомоторов через коммутатор или сумматор. При использовании коммутатора в контуре часто используется функция max/min, обеспечивающая преимущественное выполнение функции регулирования скорости при отключении нагрузки. Подключение через сумматор позволяет избежать переключения сигналов, но регулятор мощности (или другой регулятор) влияют на регулятор скорости, что требует стабилизации его работы. Показанная на рисунке 10 конфигурация обычно используется на пиковых электростанциях.
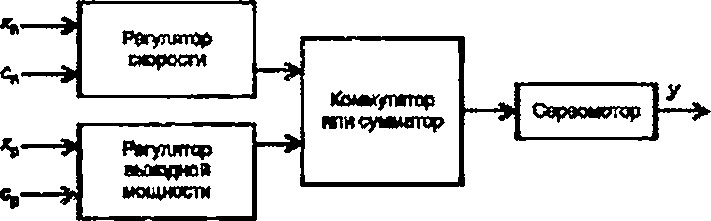
Рисунок 10 — Системы параллельного управления регуляторами скорости и выходной мощности
На рисунке 11 показана параллельная работа регуляторов скорости и мощности в соответствии с 4.2.3.
10
ПНСТ 49—2015
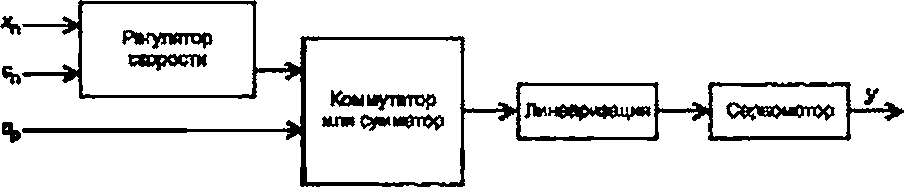
Рисунок 11 — Система параллельного регулирования скорости и мощности На рисунке 12 показано аналогичное включение регулятора уровня воды.
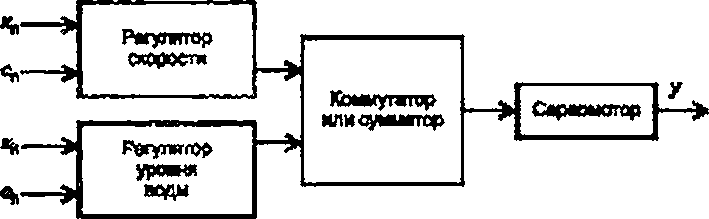
Рисунок 12 — Система параллельного регулирования скорости и уровня воды
4.3.3 Последовательные структуры
Регулятор выходной мощности или регулятор уровня воды устанавливаются перед регулятором скорости. Они приводят в действие задатчик сигнала скорости регулятора скорости (см. рисунок 13) или ограничитель открытия (см. рисунок 14).
На рисунке 13 регулятор мощности приводит в действие задатчик сигнала скорости регулятора скорости.

Рисунок 13 — Последовательное включение регуляторов мощности и скорости На рисунке 14 регулятор уровня воды включает ограничитель открытия регулятора скорости.
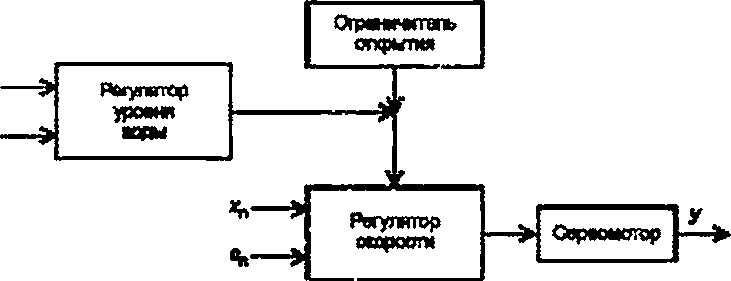
Рисунок 14 — Последовательное включение регуляторов уровня воды и скорости
Конфигурации, показанные на рисунках 13 и 14. являются типичными. Однако существуют конфигурации с регулятором мощности, действующим на ограничитель открытия регулятора скорости или с
и
ПНСТ 49—2015
регулятором уровня воды, действующим на задатчик скорости. В режиме регулирования мощности и уровня воды регулятор скорости выполняет функцию золотника.
Конфигурация, показанная на рисунке 14. часто используется в режиме несения базовой нагрузки электростанций.
4.3.4 Другие конфигурации
4.3.4.1 Работа регулятора мощности через регулятор скорости (выходная мощность введена как сигнал обратной связи)
Переключение режимов управления путем перехода от сигнала фактической скорости к сигналу фактической мощности (см. рисунок 15).

Рисунок 15 — Управление мощностью через регулятор скорости 4.3.4.2 Регулятор уровня воды без регулятора скорости
В простых случаях (асинхронный генератор) регулятор уровня воды действует на сервомотор через установщик золотника (см. рисунок 16).
*
ftxyrwvop уровни ВОДЫ | |||
—» | Золотник | Сервомотор | |
Рисунок 16 — Регулятор уровня воды без регулятора скорости
4.4 Конфигурации сервомоторов
В зависимости от требуемого усилия главный золотник сервомотора может приводиться в действие: - непосредственно электро гидравлическим усилителем с электронной обратной связью с регулятором: * через вспомогательный сервомотор, включающий гидромеханическую следящую систему с обратной связью, состоящую из главного золотника, сервомотора и механической обратной связи:
-через предварительный главный золотник с параллельной обратной связью от главного золотника и сервомотора, и т. д.
Тип конфигурации влияет на состав функций и точность ручного управления.
4.5 Многоступенчатый контроль
4.5.1 Общие положения
При управлении несколькими элементами (например, в турбинах двойного регулирования) механизмы управления последовательной (см. рисунок 18) и параллельной (см. рисунок 17) структур различаются. Закон регулирования имеет нелинейный характер и определяется генератором функций. В контур управления может быть внесен дополнительный сигнал (например, напор, который влияет на величину угла разворота лопасти). При использовании более двух сервомоторов (например, индивидуальный привод лопаток НА) применяется только параллельное управление сервомоторами.
4.5.2 Параллельная структура
е
ел
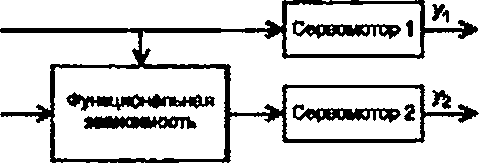
в — выходной сигнал электродного регулятора; у, — выходной сигнал сервомотора 1; уг — выходной сигнал сервомотора 2; Сд— входной сигнал для определения функциональной зависимости
Рисунок 17 — Параллельная структура с заданием функциональной зависимости и дополнительным сигналом 12
ПНСТ 49—2015
4.5.3 Последовательная структура
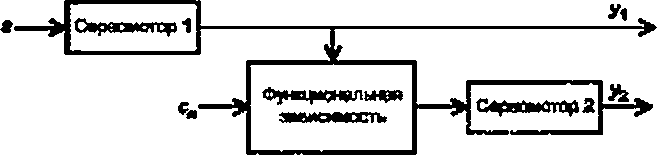
а — выходной сигнал электронного регулятора: — выходной сигнал сервомотора 1. у2 — выходной сигнал сервомотора 2:
са — входной сигнал для определения функциональной эависиыости
Рисунок 16 — Последовательная структура с заданными функциональными связями и дополнительным сигналом
5 Производительность и компоненты управляющих систем
5.1 Общие положения
8 настоящем разделе приведены общие критерии эффективности управляющей системы. Так как производительность управляющей системы турбины существенно зависит от особенностей индивидуаль* ной управляемой системы, то приведены рекомендации по ее моделированию и цифровой симуляции.
Так же приведены рекомендации по диапазону настройки параметров ПИД-регулятора в качестве наибопее распространенного примера алгоритмов управления. Могут быть применены и другие стратегии управления, если их производительность выше, чем у ПИД-регуляторов.
Также в разделе рассмотрены сервомоторы, требования к датчикам и элементам энергоснабжения с целью установления их спецификаций.
5.2 Моделирование
При разработке систем управления новых ГЭС для оптимизации управления используются математические модели, если схема управления достаточно сложна и/или похожа на существующие. Это же относится к модернизации оборудования существующих станций. Целью расчетов на моделях является:
• определение проектных параметров станций;
• наблюдение и изучение динамических свойств системы (резонансные явления и др.);
• анализ системы управления и ее оптимизация.
Расчеты должны быть основаны на репрезентативной модели компонентов системы, таких как:
• модель проточной части турбины;
• модель турбины и ее механизмов;
• характеристики генератора (для работы на изолированную нагрузку и сеть);
• характеристики энергосистемы;
• характеристики управляющих систем.
Все упомянутые сферы приложения могут отражаться одной и той же моделью, хотя математические подходы к моделированию могут различаться. Параметры компонентов станции рассчитываются во временном разрезе, а динамическое поведение системы в целом оценивается еще и в частотном аспекте. Эффективность управления оценивается по частотным характеристикам при относительно небольших отклонениях параметров от установившихся значений, или в зависимости от времени (для больших отклонений), когда влияние нелинейности становится значительным.
При частотном анализе динамика открытия направляющего аппарата рассматривается при воздействии на него синусоидальных колебаний. Так рассматриваются частотные диапазоны, е которых возможны вихри в отсасывающей трубе в радиально-осевых турбинах и/или резонанс с собственной частотой тоннеля, напорного трубопровода или генератора. При этом следует отметить, что рассчитанная собственная частота гидросистемы содержит погрешности, так как скорость распространения волн не может быть определена точно.
Расчеты во временном аспекте для оптимизации параметров настройки регулятора имеют некоторое преимущество за счет учета нелинейности процессов. Обычно применяется интегральный критерий типа
J|x-xc|df = min
или
13
ПНСТ 49—2015
Jr|x-xc|df «min.
Использование компьютерных программ, которые систематически изменяют и выбирают оптимальные значения параметров, позволяет определить настройки адаптивного регулятора во всем рабочем диапазоне изменения параметров.
Оптимизация параметров настройки управления при частотном анализе требует использования линеаризованной модели. Оптимальные параметры настройки, т. е. корни характеристических уравнений для оптимальной производительности могут быть определены подбором. Для этого требуется некоторый опыт. Степень детализации моделирования зависит от требований к управляемости станции, так как затраты на моделирование даже небольших систем могут быть достаточно высоки. Ниже рассматриваются некоторые рекомендации по моделированию в отдельных случаях.
5.2.1 Проточная часть турбины
При моделировании проточной части должны быть учтены сжимаемость жидкости и деформация материала трубопровода. При определении размеров и оценке возможности возникновения резонанса это должно относиться к трубопроводам, галереям и корпусам уравнительных резервуаров. При анализе процесса во временном аспекте считается, что при колебании вода несжимаема и стенки элемента недеформируемые.
Для определения экстремального значения уровня воды уравнительного резервуара и максимальных значений параметров, таких как скорость и повышение давления следует провести анализ сечений уравнительного резервуара и напорного трубопровода, влияние колебаний на поведение системы управления могут быть достоверно оценены только на основе полного описания многокомпонентной системы.
При расчете уравнительного резервуара следует учитывать потери энергии в дросселях и инерцию жидкости.
На низконапорных станциях следует учитывать влияние инерции водных масс на напор и уровень нижнего бьефа, в то время как деформацией материала можно пренебречь. Также следует учитывать волновые явления в верхней части каналов.
5.2.2 Турбина, генератор, сеть
В расчетах следует учитывать особенности турбины. Регулирование скорости ковшовых турбин может быть затруднено из-за нехватки отрицательного вращающего момента и нелинейности, созданной отсекателем. Для работы на изолированную нагрузку необходимы управляемые отсекатели.
Для исследований на резонанс следует учитывать факторы синхронизации и демпфирования генератора агрегата, связанного с сетью.
Стабильность регулирования частоты в изолированных энергосистемах зависит от типа нагрузки: активная, двигательная или комплексная нагрузка. Самые строгие требования предъявляются активной нагрузкой.
5.2.3 Понятие регулирования
Следует ожидать, что ПИД-регуляторы будут и в дальнейшем использоваться на многих станциях для регулирования скорости, мощности и уровня воды. Более сложные алгоритмы, например схемы контроля состояния, будут использоваться для более сложных требований к системе. Эти схемы регулирования требуют значительно больших затрат и будут оправданны, если предъявлены более строгие требования к величине отклонения параметра от устойчивого состояния и скорости возвращения к устойчивому состоянию.
Необходимо отметить, что эффективность электронного ПИД-регулятора может также быть увеличена доступными средствами, такими как нарушение суперпозиции и введение обратной связи по вторичным переменным.
Это служит обоснованием рекомендации использовать ПИД-регулятор в качестве основы для рекомендаций. касающихся системного управления. Рекомендуемые диапазоны регулирования параметров достаточны для всех нормальных режимов. Специальные условия, такие как чрезвычайно низкая инерционность, чрезвычайно большой напор, должны быть подвергнуты цифровому моделированию и могут потребовать расширения рекомендуемого диапазона регулирования параметров.
5.3 Характерные параметры ПИД-регулятора
5.3.1 Общие положения
Типичные параметры ПИД-регулятора (аналогового или цифрового) с постоянным статиэмом приведены в 5.3.2 и 5.3.3. Для более сложных алгоритмов или стратегий управления параметры следует определять отдельно.
14
ПНСТ 49—2015
5.3.2 Остаточный статизм Ьр
Для агрегатов, участвующих в регулировании частоты сети, остаточный статизм устанавливает определенное взаимодействие между относительным изменением скорости вращения (частоты), и от* носительным положением сервомотора или изменением выходной мощности в установившемся режиме. например, х„ + Ь -у - 0.
Если для регулирования используется относительное положение сервомотора. Ьр определяется как «остаточный статизм по скорости» или «статизм по частоте и открытию».
Если для регулирования используется относительная выходная мощность. Ьр определяется как «статизм ло мощности», «регулирование скорости» или «статизм по частоте и мощности».
При регулировании частоты рекомендуемый минимальный диапазон изменения статизма от 0 % до 10 %.
Примечание — Например, при значении статизма по мощности 5 % с установившимся отклонением частоты на минус 1 % {- 0.5 Гц при заданной частоте сети 50 Гц) агрегат, работающий на сеть, увеличит свою выходную мощность на 20 % Pq, .
Принципиальная функциональная схема остаточного статизма по выходной мощности приведена на рисунке В.1 приложения В.
Для агрегатов, участвующих в регулировании уровня воды (с регулятором уровня воды, встроенном в регулятор), остаточный статизм определяется как «статизм ло уровню» и устанавливает соотношение между относительными изменениями уровня воды и относительными изменениями положения штока сервомотора в установившемся режиме, например: xh+ £уу = 0.
5.3.3 Коэффициент пропорциональности Кр, интегральное время Г, и дифференциальное время Т0
Параметры Кр, Г, и Т0 устанавливают параметры отклика системы регулирования. Желаемый отклик системы может быть достигнут:
• с параллельной структурой;
• с последовательной структурой;
• со структурой обратной связи компонентов.
Выбор вида регулирования параметров зависит от управляемой системы и должен обеспечивать удовлетворительный отклик системы. В зависимости от режима работы регуляторы могут быть:
a) регуляторами скорости:
• в режиме без нагрузки (холостой ход генератора);
• в режиме работы на изолированную сеть (работа неполной мощностью);
• в сетевом режиме (полный диапазон изменения мощности);
b) комплексными регуляторами мощности и скорости, как показано на рисунках 10.11.13 и 15:
• в режиме регулятора скорости с отключенным регулированием по мощности;
• в режиме регулятора скорости с включенным регулированием по мощности.
Режимы работы без нагрузки или работы на изолированную сеть и режим работы параллельно с сетью значительно отличаются.
При автоматическом регулировании параметров должна быть предусмотрена подстройка (при выборе положения генераторного выключателя или выборе критерия перехода к работе на изолированную сеть, например, при большом изменении частоты или мощности).
a) Коэффициент пропорциональности Кр эквивалентен величине переменного статизма скорости Ьг
Рекомендуемый минимальный диапазон регулирования:
• для регуляторов скорости — от 0.6 до 102;
• для регуляторов мощности — от 0.2 до 1.
b) Интегральное время Tt.
Рекомендуемый минимальный диапазон регулирования уровня воды: от 1 до 20 с (могут быть использованы большие значения).
Примечание — Диапазон от 1.2 до 10 для Кр и or 1 до 5 с для Г, может быть достаточен для многих задач, например восстановления без дополнительных требований х производительности.
c) Дифференциальное время Г0.
Рекомендуемый диапазон регулирования; от 0 до 2 с. где отношение Т10/Т0 = 1/К10 от 0.1 до 0,2.
Минимально рекомендуемый диапазон от 0 до 1.4 с. Время, равное 0. означает, что возможно отключение функции дифференцирования.
15
ПНСТ 49—2015
5.4 Другие параметры систем регулирования
5.4.1 Поправка команд для контролируемых переменных (скорость, выходная мощность и др.) и ограничитель нагрузки
a) Диапазоны управляющего сигнала
Рекомендуемый диапазон для регулирования скорости: от минус 10 % до +10 %.
b) Установка времени
Время срабатывания должно быть установлено большим, чем минимальное время хода поршня сервомотора, соответствующим предельному открытию (5.4.3). Установка времени не должна быть менее 20 с.
Рекомендуемый диапазон установки времени (для полного хода поршня сервомотора):
- регулирование скорости: от 20 до100 с (обычно от 30 до 60 с):
- регулирование мощности: от 20 до 80 с:
• ограничитель: от 20 до 80 с.
5.4.2 Погрешность регулятора 1Ж12
Рекомендуемые ограничения:
- регулирование скорости: iKt 2 < 2 10*;
- регулирование мощности: iK / 2 < 1 • 10'2:
- регулирование уровня воды3: >х f 2 < 1 • 10'2;
- регулирование расхода воды: /х / 2 < 1 Ю'2.
Соотношение /ХУ2 < 2-10"2 допустимо для функции регулирования скорости при относительно нестрогих требованиях к регулированию частоты в сети. Это может, например, относиться к сетям с большими колебаниями частоты, а также в случаях, когда стабильность имеет решающее значение.
Примечание — Для уровня управления, отличного от показанного на рис. 5. используется следующее определение: /х =
5.4.3 Параметры сервомотора
Вход: электрический сигнал или положение главного золотника(вспомогательного сервомотора).
Выход: относительное положение штока У/Утах главных сервомоторов.
Для всех сервомоторов, включая сервомоторы турбин двойного регулирования, применимы следующие правила:
a) определено минимальное время открытия/закрытия сервомотора Тд и Г, с точки зрения недопущения разгона и гидравлического удара.
Примечание — Ограничивающие отверстия или другие устройства сделаны таким образом, чтобы фактическое время срабатывания при самом высоком давлении и самой низкой требующей регулирования мощности не было ниже допустимого:
b) постоянная времени главного сервомотора Гу
Это значение используется для моделирования системы.
Рекомендуемые значения Ту:
-для сервомотора направляющего аппарата/иглы — от 0.1 до 0,25 с;
- для сервомотора рабочего колеса — от 0,2 до 0.8 с:
- для отсекателя — от 0.1 до 0,15с.
Более высокие значения Гу около нулевого смещения преобладают из-за перекрытия и углубления (см. Гу, на рисунке 7).
Примечание — При ступенчатой частотной характеристике или при достижении предельной скорости перемещения сервомотора для вычислений используется эффективная постоянная времени (в зависимости от амплитуды):
c) погрешность сервомотора при возвращении в исходное состояние га.
Погрешность главным образом влияет на мертвую зону ix и должна быть минимальной.
Рекомендуемые значения для всех систем сервомотора /а< 0,4 %.
Примечание — Для малых ГЭС указанные значения могут быть увеличены до Ja < 0.6 % и Гд < 0.30 с:
О) время запаздывания регулятора (мертвое время) Tq.
Время запаздывания регулятора Гд определяется временем запаздывания электронного компонента регулятора (осуществление выборки времени в микропроцессоре) и задержек в работе золотников и/или последовательно расположенных гидроусилителей.
16
ПНСТ 49—2015
Рекомендуемые значения Tq< 0,20 с: е) динамический отклик сервомотора.
Динамический отклик ло существу определен постоянной времени сервомотора. В случае много* ступенчатого сервомотора следует определить специальную передаточную функцию (электронное позиционирование), вызывающую отклик, соответствующий коэффициенту демпфирования D в диапазоне от 0.8 до 1.1 при условии, что процесс затухает при D - 1 (см. рисунок 19).
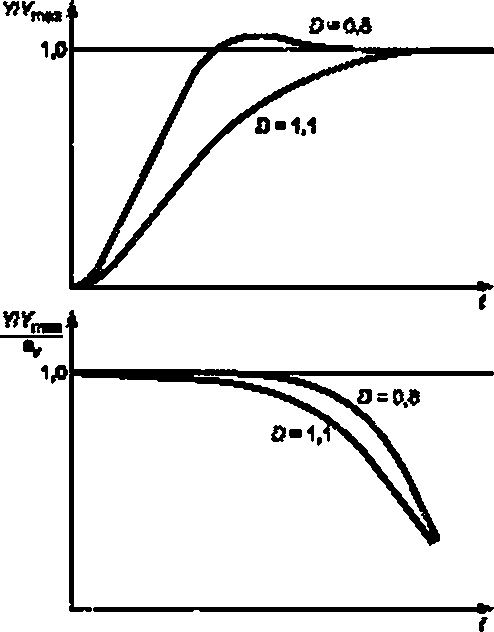
£> < I — периодически затухающий случай. О > ! — апериодический случай.
У/Утш — а зависимости от сдои>а входного сигнала sv
Рисунок 19 — Время отклика и частотная характеристика усилителя выходной мощности
5.5 Функциональное взаимодействие между сервомоторами
5.5.1 Двойное регулирование турбин с управляемым НА и лопастями рабочего колеса
5.5.1.1 Общие положения
Функциональное взаимодействие между НА и лопастями рабочего колеса поддерживает комбинаторная связь. Различают следующие структуры взаимодействия:
- параллельную:
• последовательную.
Напор Н также оказывает влияние на функциональное взаимодействие, в процессе регулирования первичное воздействие может оказываться либо на НА. либо на сервомотор рабочего колеса.
5.5.1.2 Реализация
Взаимосвязь может быть реализована:
- в электронном виде через функциональные генераторы с учетом (или без учета) влияния напора:
• механически с помощью кулачка комбинатора, спроектированного для расчетного напора (для небольших колебаний напора или сниженных требований):
- механически с помощью «пространственного кулачка» комбинатора-кулачка. который в зависимости от изменения напора электрически или вручную перемещается вдоль валика комбинатора.
5.5.1.3 Регулирование
Определенные функциональные взаимодействия между открытием направляющего аппарата и
углом разворота лопастей рабочего колеса основываются на результатах индивидуальных или серий
17
ПНСТ 49—2015
ных испытаний модели, взаимодействия могут быть проверены или скорректированы на месте коэффициентами. измерением эффективности или других величин.
5.5.2 Двойное регулирование турбин с иглами и отсекателями
Цель отсекателя состоит в ограничении скорости при колебаниях нагрузки и управлении скоростью при больших колебаниях режима изолированной сети Регулирование может быть достигнуто следующими способами:
• параллельное управление иглами и отсекателем;
• прямое управление иглами и следящее управление отсекателем:
• прямое управление отсекателем и следящее управление иглами.
Следящая система может быть выполнена:
- в электронном виде посредством генератора функции:
- механически посредством кулачка комбинатора в цепи управления:
- механически посредством кулачка комбинатора в цепи обратной связи.
5.5.3 Многократное управление
Многократное управление применяют при управлении индивидуальными сервомоторами открытия направляющего аппарата и управления иглой. Индивидуальные сервомоторы часто управляются параллельно.
5.5.4 Другие взаимодействия
Примеры регулирования в соответствии с 5.16.1 и 5.16.3:
• управление лопастями рабочего колеса и лопатками направляющего аппарата и, возможно, положением затвора отсасывающей трубы для минимизации скачка давления после сброса нагрузки;
• управление открытием направляющего аппарата и положением клапана байпаса для ограничения колебаний давления и роста скорости при сбросе нагрузки:
• управление открытием направляющего аппарата и положением клапана байпаса в нормальном режиме и после отклонения нагрузки при работе электростанции совместно с ирригационной схемой.
5.6 Фактическое измерение сигнала
5.6.1 Общие положения
Для различных задач регулирования измеряются следующие переменные:
• скорость вращения вала;
- выходная мощность;
• уровень воды;
-давление;
- параметры гидравлического удара.
5.6.2 Скорость вращения вала
5.6.2.1 Методы измерения скорости вращения вала для электронных регуляторов Скорость вращения вала может быть измерена при помощи:
- импульсного генератора Холла или зубчатого диска (если конец вала недоступен) с импульсным преобразователем:
- измерения скорости вращения генератора с помощью преобразователей остаточного магнетизма;
- тахогенератора. особенно, если доступен свободный конец вала:
• другими способами.
5.6.2.2 Методы измерения скорости вращения в гидромеханических регуляторах Маятниковый механизм с ременным приводом (для простых или существующих станций) Рекомендуется дополнительная проверка привода для предотвращения разрыва или проскальзывания ремня.
Маятниковый механизм с моторным приводом. Источники питания привода:
- генератор на постоянных магнитах, соединенный с валом турбины:
- дополнительная обмотка главного генератора:
- обмотка возбуждения главного генератора, подключенная через преобразователь.
Во всех случаях кроме первого, управление приводом становится возможным после запуска агрегата. 5.6.3 Выходная мощность
Выходная мощность измеряется посредством преобразователя. Входной сигнал регулятора должен быть хорошо отфильтрован, но это не должно создавать задержку его срабатывания.
18
ПНСТ 49—2015
5.6.4 Уровень воды
Уровень воды измеряется электрически {например, с помощью контактного датчика) или механически (например, с помощью поплавка, преобразователя давления, пневматического или других датчиков) и передается регулятору уровня воды.
5.6.5 Положение (перемещение) привода
Положение/перемещение привода (например, обратной связи) определяется:
• электрически (вращающимися или линейными преобразователями):
• механически (связями, тросами, ременным приводом).
Для электрических преобразователей важно:
• отсутствие люфта е механических соединениях:
• сопротивление окружающей среды;
• гибкость.
При механической связи нужно избегать люфта и действия непредвиденных сил (например, избыточного хода при избыточном воздействии). В случае тросового и ременного привода важно поддерживать достаточное их натяжение. Система должна иметь достаточно высокий коэффициент запаса безопасности от возникновения явлений резонанса.
5.6.6 Передача сигнала от электронных датчиков
Для передачи сигнала от датчика к регулятору согласно 5.6.2 к 5.6.5 обычно используются сигналы от 0 до 20 мА или от 4 до 20 мА. Сигналы менее 4 мА и более 20 мА используются для проверки сигналов. Для передачи сигнала и подавления индукционных шумов используются экранированные или витые кабели. Сигналы в цифровой форме можно передавать по оптоволоконным кабелям.
5.7 Ручное управление
Ручное управление понимается как средство открытия турбины с использованием средств автоматического управления или непосредственно с помощью исполнительных механизмов. В обоих случаях безопасность агрегата обеспечивается защитой от превышения скорости.
Ручное управление необходимо для обеспечения бесперебойности производства электроэнергии путем резервирования системы автоматического управления или ее части от неисправности. Ручное управление может быть полезно в период ввода турбин в действие и начальной эксплуатации.
В зависимости от степени ухудшения системы управления ручное управление будет охватывать все большее число функций управления. Затраты вырастут настолько, сколько функций перейдут ручному управлению. Кроме того, использование пропорциональной установки стоит дороже, чем импульсной.
Ручное управление осуществляют:
a) с использованием разомкнутого цикла автоматического управления.
Разомкнутый цикл для ручного управления — неотъемлемая часть автоматизированной системы, которая предусматривает возможность ручного управления без уменьшения функциональности автоматического управления, во время эксплуатации турбины функции наблюдения сохраняются.
Для повышения надежности агрегата может использоваться избыточная конфигурация системы автоматизированного управления. При отказе одной из систем резервная сможет взять на себя управление. сохраняя полную функциональность.
b) путем пропорционального позиционирования.
Ручное управление реализуется с помощью независимой цепи управления в обход цепи автоматического управления. Цепь автоматического управления, включая обратную связь, в этом случае сохраняет функциональность. Независимый источник энергии и другие избыточности могут быть устроены для увеличения системной доступности.
c) путем интегрального или импульсного позиционирования.
Ручное управление позволяет использовать автоматическую цепь управления распределительным клапаном (золотником) или включить (вспомогательный) сервомотор непосредственно через отдельный распределительный клапан. Цель автоматического управления, включая функцию обратной связи, в этом случае нарушается.
d) путем механического пропорционального позиционирования.
Ручное управление непосредственно воздействует на главный распределительный клапан механически. и требует механической обратной связи. Если конструкция усилителя не включает механическую обратную связь, для целей ручного контроля она должна быть обеспечена. Величину затрат нужно оценить.
19
ПНСТ 49—2015
5.8 Линеаризация
В некоторых случаях желательно, чтобы управляемая переменная, например выходная мощность. зависела от входного сигнала линейно. В этом случае зависимость между входным (установочным) сигналом и перемещением привода — нелинейная.
Исполнение:
- в электронном виде с помощью генератора функции:
- механически с помощью «пространственного кулачка» комбинатора.
5.9 Следящее управление
В случае безударного перехода из одного эксплуатационною режима в другой команды управления (которые находятся не в линии) комбинированной системы управления с переключателями (см. рисунки 10—13) должны отслеживать контролируемые переменные в случае их изменения. Следящее управление впечет дополнительные расходы. Особенно в аналоговых системах.
Примеры
1 Командный сигнал регулятора мощности отслеживает фактический сигнал выходной мощности в режиме регулирования скорости.
2 Командный сигнал скорости отслеживает фактический сигнал частоты в режиме управления выходной мощностью.
3 Заданное вручную значение отслеживает фактическое положение привода в различных режимах управления.
4 Для минимизации времени запуска агрегата (5.14.1) может быть предварительно определено открытие для разных значений напора или может быть организован отдельный контур пуска агрегата с, например, управлением ускорением.
В случае дистанционного управления местное управление должно следовать за соответствующими командами верхнего уровня управления.
5.10 Оптимизации управления
Для оптимизации режима работы станции по максимуму эффективности, равномерности загрузки агрегатов или другим критериям могут быть предложены особые конфигурации системы управления, такие как:
- ступенчатое управление несколькими иглами в ковшовых турбинах:
• распределения нагрузки между несколькими агрегатами станции
- и другие.
5.11 Мониторинг параллельной работы усилителей приводов
В случае если лопатки направляющего аппарата или иглы ковшовой турбины управляются индивидуальными сервомоторами, рекомендуется проводить мониторинг согласованности их работы. Для этой цели должны контролироваться отклонения каждого сервомотора от их среднего положения. Превышение отклонением заданного ограничения должно вызвать предупредительный сигнал или отключение агрегата. Также может контролироваться отклонение перемещений сервомоторов в контурах индивидуального управления лопатками или иглами. Если они не возвращаются к нулю в заданный промежуток времени, то срабатывает предупредительный сигнал или агрегат отключается.
5.12 Обеспечение необходимого приводного усилия (энергии)
5.12.1 Общие положения
Необходимые фактические усилия обеспечиваются преимущественно масляными гидроприводами.
Минимальное требуемое давление pR определяется необходимой энергией для перемещения штока сервомотора ER (с учетом трения) и объемом сервомотора pR = ER/VS
Следует различать системы с аккумуляторами и без них.
Системы с аккумуляторами предпочтительнее там. где требуется быстрая подача большого количества энергии (например, в случае регулирования выходной мощности или при строгих требованиях к регулированию частоты).
5.12.2 Системы с аккумулятором
5.12.2.1 Напорный бак (воздушно-масляный гидроаккумулятор)
Для эксплуатации и расчетов маслонапорных установок (МНУ) применяют соответствующие правила.
20
ПНСТ 49—2015
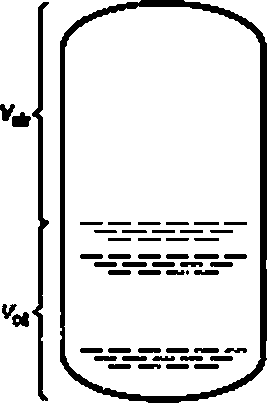
P*rm
р0 — рабочее давление масла: рвтвж Pomri — диапазон рабочею давления: роош » Ю.85 - 1.0)р& Pomri * (0.80 - 0.9)ро
Рт<д4Мп> р, > рг) — давление отключения (минимальное давление для экстренного закрытия):
pR * (0,58 - 0.7S)pg — минимально требуемое давление
Рисунок 20 — Конструкция напорного бака МНУ и диапазоны давления
Примечание — При определении максимального рабочего давления р0 тах применяются нормы, касающиеся открытия и максимального давления предохранительного клапана. Значение Ру выбирается таким, чтобы давление после закрытия не опускалось ниже значения рд.
Рекомендуемый объем масла при:
• одноконтурном управлении Vu - 3VS;
• двухконтурном управлении \Л = 3 + (1.5 - 2.0) Vg^;
^=3VSde + O.5-2.0)VSne.
где Vs — масляный объем всею сервомотора:
V'Sgi — полный объем сервомоторов всех направляющих аппаратов:
^sru — объем сервомотора управления лопастями рабочего колеса:
V'Sde — полный объем сервомоторов всех отсекателей;
V'Sne — полный объем сервомоторов всех игл.
Примечание — При работе на изолированные сети могут потребоваться более высокие значения этих параметров.
Минимально используемый объем масла.
При отсутствии требований, связанных с работой на изолированную сеть, объем эксплуатационного масла может быть уменьшен до минимума, который соответствует объему отключения V-f.
где q, — протечки масла во всей системе масляного хозяйства станции:
tf— время механического закрытия сервомоторов или закрытия входного клапана:
Че« — резервный объема масла в нижней части напорного бака, включая объем для предотвращения попадания воздуха в систему.
5.12.2.2 Поршневые аккумуляторы
Поршневые аккумуляторы с герметичным разделением масла и газа (главным образом азота) позволяют использование в них более высокого предельного давления, чем установленное национальными кодексами для воздушно-масляных гидроаккумуляторов. Объем остатка масла и автоматическое пополнение газа не должны обеспечиваться.
При расчете проектного объема поршневого аккумулятора необходимо учесть диапазон изменения температуры окружающей аккумулятор среды, чтобы гарантировать аварийное отключение турбины даже при экстремально высокой или низкой температуре.
21
ПНСТ 49—2015
Определение давления р0
Диапазон изменения рабочего давления (р^ maK - ро mjn];
Р. ««■ (0.8-1.0)^ рь:
Роти= <0.75-0.9) pD.
Примечание — При определении максимального рабочего давления используются те же нормы, нормы. что и для остаточного давления в предохранительном клапане.
Давление отключения (минимальное давление для экстренного закрытия) рг выбирается так. чтобы давление после закрытия не опускалось ниже pR - pr (ро min > pj > pR).
Минимальное давление pR = (0.5 - 0.75) р0
Рекомендуемый объем эксплуатационного масла Vu при:
-одноконтурном управлении — Vu - 3VS;
-двухконтурном управлении — Va - 3VS ♦ (1.5 - 2.0)Vglu:
^ = 3Vs9de + (1.5-2.0)VSne.
5.12.2.3 Баллонные аккумуляторы
Баллонными называют гидроаккумуляторы, у которых разделителем жидкости и газа служит эластичный резиновый баллон. Если безопасное закрытие НА агрегата зависит от запаса энергии в аккумуляторе. баллонные аккумуляторы не могут использоваться, так как их масло-газовый объем не может контролироваться непосредственно. Если закрытие НА агрегата гарантируется другими средствами (например, сила тяжести, концевая пружина), баллонные аккумуляторы могут применяться.
Поскольку разрыв баллона не может быть предотвращен гарантированно, нужно учитывать возможность распространения в остальной части системы растворенного в масле газа. В частях системы с более низким давлением газ будет выделяться в виде пузырьков. Газовые пузыри могут собираться в устройствах системы или проходить через клапаны и отверстия. В обоих случаях возможно возникновение сбоя (неустойчивость, колебания или нерегулярные быстрые перемещения сервомоторов). Поэтому использование баллонных аккумуляторов в конструкциях, критических к гидравлическому удару (например, ковшовые турбины с длинным напорным водопроводом), нужно избегать или допускать только после детальных исследований.
5.12.2.4 Другие системы
Для создания необходимого усилия, обеспечивающего безопасность закрытия НА и остановку турбины, используются гравитационные или пружинные аккумуляторы (для низконапорных турбин), давление воды в напорном трубопроводе (высоконапорные турбины) или комбинированные системы в сочетании с маслонапорными установками.
Параметры таких систем должны быть определены таким образом, чтобы турбина могла быть остановлена даже в случае отсутствия давления масла в комбинированной системе.
Открытие НА в большинстве случаев осуществляется с использованием маслонапорных установок.
5.12.2.5 Насосы для аккумуляторных систем
Для создания давления в маслонапорной установке используются два насоса с приводом от асинхронного двигателя, мощностью, обеспечивающий перекачку одного объема сервомоторов турбины в минуту, или мощностью, позволяющей увеличить давление полного объема масла от р0 т(п до р0 тах в течение минуты. Действительные значения мощности насоса для обоих критериев будут меньше.
Для комбинированных маслонапорных установок агрегатов с сервомоторами турбины и НА совокупная мощность обоих насосов должна позволить открывать НА в течение минуты. Такие маслонапорные установки безопасны, если закрытие НА обеспечивается весом агрегата или гидравлическим давлением из напорного трубопровода.
В случае более высоких требований к времени пуска агрегата и/или скорости регулирования должны использоваться более мощные насосы.
В особых случаях (например, при пуске с потерей внешнего питания — «темный пуск») двигателем второго насоса может быть двигатель постоянного тока, маленькая турбина на высоконапорных станциях или вал турбины.
В некоторых случаях в дополнение к главным насосам, или вместо второго насоса большой мощности может быть использован лекажный агрегат.
5.12.2.6 Резервуары маслосборника
Рекомендуется следующее расположение:
- резервуар должен быть рассчитан на размещение объема масла всей гидравлической системы;
• он должен также иметь средства, обеспечивающие полный слив масла и сконденсированной при точке росы воды (например, наклонное дно) для его периодического обслуживания.
22
ПНСТ 49—2015
Резервуар маслосборника должен быть рассчитан на размещение объема масла всей гидравлической системы. Резервуар маслосборника должен также иметь средства, обеспечивающие полный слив масла и воды, сконденсированной при точке росы (например, наклонное дно), для его периодического обслуживания.
5.12.2.7 Вспомогательное оборудование
Охлаждение и нагревание
Охлаждение масляной системы обычно требуется для агрегатов большой и средней мощности в тропических зонах, и агрегатов с поворотно-лопастными турбинами с подачей масла в турбину через подшипник.
Охлаждение/нагревание может быть желательным для ограничения изменения вязкости масла.
выпуск масляного тумана
Для выпуска масляного тумана все резервуары должны быть оборудованы вентилем с фильтром и масляной ловушкой.
При неблагоприятных условиях (например, подземные электростанции с системами кондиционирования воздуха замкнутого контура) нужно иметь отдельное оборудование выпуска масляного тумана.
5.12.2.8 Пневмохозяйство маслонапорных установок
a) Для напорного бака (котла маслоналорной установки)
Воздух высокого давления обычно производится компрессорами. Давление должно быть выбрано так. чтобы превысить давление р0 гидравлической системы. Мощность компрессоров должна быть достаточной для обеспечения заданного времени пуска агрегата с учетом гидравлического сопротивления трубопроводов системы.
Рекомендуемое время первичного заполнения бака 6—12 ч.
воздух должен быть высушен. Автоматическое пополнение воздуха требует следующего дополнительного оборудования:
- поплавковый выключатель в напорном баке;
• датчик давления в напорном баке:
• управляющий модуль компрессора.
b) Для аккумуляторов
Необходимы газовые баллоны и специальное устройство подключения их.
5.12.3 Системы без аккумулятора
5.12.3.1 Системы с постоянным расходом воды
Системы с постоянным расходом воды характеризуются использованием постоянных насосов перемещения сервомоторов. 8 устойчивом состоянии лишнее масло сбрасывается через регулировочный клапан или байпас.
Для уменьшения потребления системы могут использоваться несколько насосов различной мощности, особенно в случае гидроприводов большой мощности.
У гидравлических насосов должны обеспечивать требуемое время открытия и закрытия турбины при номинальных протечках. В случае использования дополнительных аккумуляторов (комбинированные системы) насосами обеспечивается только время открытия. Тепловые потери должны компенсироваться системой охлаждения.
5.12.3.2 Системы с переменным расходом
Разомкнутая система
В системах с переменным расходом (см. рисунок 21) используют насосы переменной производительности. Расход насоса в этом случае согласован с мгновенным требуемым расходом воды поервд-ством регулирования давления. Мощность насоса не отличается от мощности системы с постоянным расходом воды, но требования к охлаждению уменьшаются.
8 небольших аккумуляторах рекомендуют не допускать кратковременных перепадов давления.
Системы должны быть оснащены предохранительным клапаном.
Замкнутые системы
Замкнутые системы характеризуются тем. что управляются и расход насоса, и направление потока жидкости. Поэтому насос объединяет функцию производства и распределения гидравлической энергии. Поскольку насос непосредственно приводится в действие сигналом регулятора, то в распределительном клапане нет необходимости.
Обе стороны сервомотора должны быть защищены от обратного тока предохранительными клапанами.
23
ПНСТ 49—2015
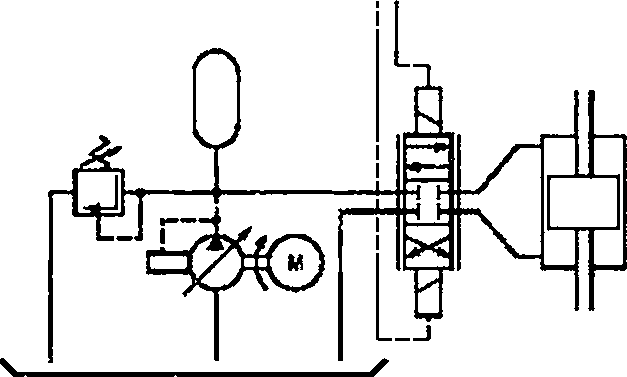
Рисунок 21 — Разомкнутая система
Восполнение внутренних протечек масла и/или балансирование сервомотора достигается путем пополнения е него масла через запорные клапаны. Для долива масла используется небольшой пере* носный насос.
5.12.4 Прямой электрический сервопривод
Для турбин небольшого размера иногда применяются направляющие аппараты с электрическим сервоприводом. Надежность их отключения обеспечивается параллельным включением клапана зам* кнутой гидравлической системы и/или отдельного источника питания.
5.12.5 Рекомендации для выбора рабочей жидкости
В гидротурбинных установках одно и то же масло иногда используется и в системе регулирования, и для смазки подшипников основного и вспомогательного оборудования.
Вязкость масла подбирается по типу проектируемой турбины и величине рабочей температуры.
Обычно достаточно использовать масло без добавок. Масло с добавками выбирается для увели* чения срока службы, особенно при высоком рабочем давлении.
Технические требования к маслу установлены в ИСО 3448.
5.13 Электропитание для автоматизированных систем управления
Шкаф управления мощностью должен быть связан с внешней батареей постоянного тока или внутренней аккумуляторной батареей и источником переменного тока.
В любой системе в случае падения напряжения рекомендуется автоматическое переключение источников тока.
Диапазон постоянного тока: (+10—20) % (по соглашению сторон может быть принят 15 %).
Диапазон переменного тока: (+5—10) % (при прямом подключении к генератору эти значения мо* гут быть выше).
Рекомендуется контролировать правильность работы системы электроснабжения собственных
нужд.
5.14 Эксплуатационные режимы
5.14.1 Пуск и синхронизация
При пуске (см. рисунок 22) зависимость скорости от времени главным образом определяется осо* бекностями установки, такими как постоянная ускорения агрегата, допустимая с точки зрения гидроудара скорость открытия направляющего аппарата или величина открытия иглы и т.д. При величине скорости примерно 80 % номинальной, управление, главным образом, зависит от скорости и времени. 8 этой фазе цель управления состоит в подготовке агрегата к синхронизации за приемлемое время. Это время позволяет оценивать работу регулятора в этой функции. Работа по синхронизации в это время не включается.
Готовность к синхронизации достигнута, когда изменение скорости dx/df не превышает заданную величину в пределах полосы синхронизации.
Рекомендуемые величины:
Полоса синхронизации (0.995 - 1.01) fnrt.
24
ПНСТ 49—2015
Заданное изменение скорости для синхронизации dx/dt = 0.003с'1.
Wfe.ee<1.S«S.O).
Предполагается отсутствие колебаний частоты сети. Нижние значения ^^применяются к пиковым режимам работы электростанций с благоприятными гидравлическими условиями, верхнее — к базовому режиму их работы. В случае влияния уравнительного резервуара иУили других гидравлических колебательных явлений, допускаются более высокие значения скорости синхронизации.
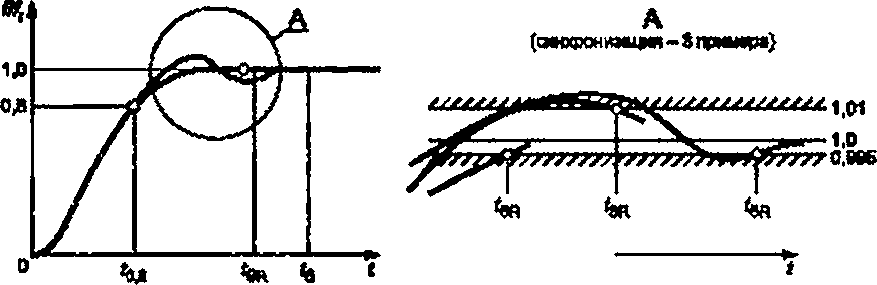
(фЗ — время достижения 60 % номинальной скорости; (до — время достижения ютовности к синхронизации.
— время подключения генератора
Рисунок 22 — Кривая скорости пуска и синхронизации
5.14.2 Нормальное отключение
Нормальное отключение определяется режимом работы станции. Команда на закрытие НА поступает от системы управления агрегатом.
5.14.3 Внезапный сброс нагрузки
Повышение скорости после сброса нагрузки (например, из-за отключения от сети) зависит от допустимого времени закрытия НА по условиям гидравлического удара и от постоянной ускорения агрегата Та до начала установочной фазы (см. рисунок 23). С этого времени работа регулятора определяется зависимостью скорости от времени.
Примечание — Для турбин с низкой быстроходностью на процесс будут оказывать влияние расходная и моменткая характеристики.
Рекомендуемые величины:
t£ltM - (2.5 - 8) (для ковшовых турбин время не ограничивается, для радиально-осевой турбины отношение может достигать 15).
nm*/nt ~ ~ 0.95) (применяется только в случае, если агрегат после отключения от сети рабо
тает на станционную сеть собственных нужд).
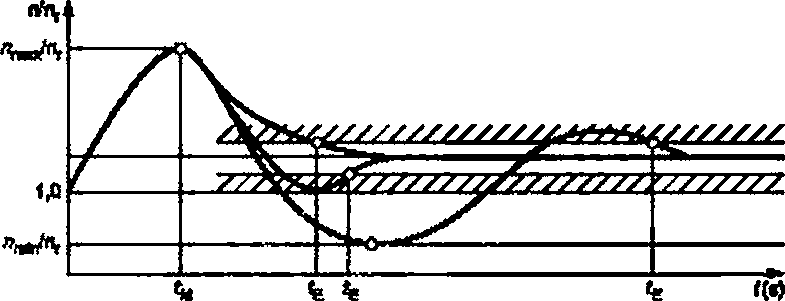
(g — время регулирования, после которого отклонение скорости от заданного значения становится ниже 11%; максимальная скорость — максимальная скорость вращения после сброса нагрузки >м. л^ — минимальная скорость после сброса нагрузки
Рисунок 23 — Сброс нагрузки
25
ПНСТ 49—2015
5.14.4 Другие эксплуатационные режимы
Переходные процессы е агрегате вызываются не только режимом работы турбины. Характеристи* ки переходных процессов разного происхождения должны быть согласованы.
5.15 Устройства и схемы защиты
5.15.1 Общее
Различные последовательности операций при отключении агрегата находятся во взаимосвязи с системой управления агрегатом и системой защиты; поэтому работа системы регулирования турбины и связанных устройств/контуров безопасности должна быть согласована с соответствующими требованиями системы управления и защиты.
5.15.2 Экстренное отключение и аварийное отключение
5.15.2.1 Общие положения
Для определения стратегий отключения, нужно различать экстренное и аварийное отключение агрегата.
5.15.2.2 Действия при отключении Перемещение сервомотора в позицию закрытия НА Размыкание выключателя
5.15.2.3 Запуск закрытия сервомотора От системы управления турбиной
От независимого клапана (золотника) закрытия
5.15.2.4 Критерии отключения Механическая ошибка Электрическая ошибка в агрегате Серьезная ошибка в системе регулирования Нажатие кнопки аварийного отключения
5.15.2.5 Стратегии отключения
Есть несколько различных стратегий отключения, используемых на практике в зависимости от комбинации критериев отключения, различных устройств, запускающих закрытие НА. и соответствующей последовательности действий отключения.
Термины «экстренное отключение» и «аварийное отключение» не стандартизированы в настоящее время из-за использования их разными участниками международного сообщества в разном смысле.
В приложении С приведены в качестве примера два различных широко используемых определения и стратегии аварийной и экстренной остановки агрегатов.
5.15.3 Защитное устройство превышения скорости
Используются следующие типы защитных устройств превышения скорости:
- электрические контакты системы измерения скорости, встроенные в регулятор;
• электрические контакты системы измерения скорости, независимые от регулятора;
- электрические контакты скорости, замыкаемые механическим маятником:
- гидравлическое устройство отключения, приводимое в действие механическим маятником.
5.15.4 Блокировки
- электрические и/или гидравлические блокировки между управляющей системой и главным эо-лотником/затеором отключения для устранения появления ошибочных команд управления или нештатных условий;
- механические и/или гидравлические блокировки направляющего аппарата для защиты от возможного открытия после экстренного или аварийного закрытия;
- электрические блокировки между управлением иглой, и тормозящим (противостоящим) соплом.
5.16 Дополнительное оборудование
5.16.1 Снижение колебаний давления
Для снижения колебаний давления в гидравлическом контуре предусматривается включенный параллельно турбине байпас, который открывается на небольшой промежуток времени в зависимости от закрывающего усилия и скорости главного привода.
В отдельных случаях такие устройства могут использоваться для поддержания постоянною расхода воды (например, байпасная перемычка в ирригационной схеме).
26
ПНСТ 49—2015
Для защиты от отказа дополнительного оборудования, например, объемного сцепления между на* правляющими аппаратами и дополнительным оборудованием или увеличением времени закрытия главного сервомотора при отказе дополнительного оборудования, необходимы дополнительные измерения.
Управление дополнительным оборудованием и его чувствительность должны быть описаны в соответствии с требованиями к эксплуатационной документации.
Особую осторожность нужно соблюдать при проектировании системы проточного тракта (труба давления, расширительный бак и т. д.).
5.16.2 Сглаживание пульсаций
Сглаживание пульсаций делается в низконапорных установках. Его цель состоит в ограничении колебания уровня воды в реках при сбросе нагрузки за счет продолжения пропуска расхода через турбину. С этой целью задается определенный угол разворота лопастей рабочего колеса, при котором после сброса нагрузки закрытие направляющего аппарата под действием регулятора продолжается, а заданный расход в нижний бьеф обеспечивается.
Следует учитывать:
• критерии (отключение питания или колебания частоты иэ*за сетевой аварии):
• заданный для работы оборудования минимальный расход;
• допустимые пределы колебания расхода в работающей системе:
• ограничения по напору и скорости течения;
• время, в течение которого активируется система:
• скорость вращения турбины;
• станционная поддержка обслуживания системы.
5.16.3 Оборудование и меры для понижения увеличения скорости
8 неблагоприятных случаях, таких как низкий момент инерции или малый допустимый прирост давления в установках с длинными трубопроводами для уменьшения повышения скорости после отклонения нагрузки требуется принять специальные меры.
К таким мерам следует отнести:
• введение байпаса (5.16.1);
• регулирование открытия лопастей рабочего колеса (5.16.2);
• введение балластного сопротивления для поглощения избыточной мощности, а также для регулирования частоты в малых гидроустановках.
5.16.4 Центральное регулирование расхода на русловых электростанциях
Входной сигнал задается вручную или автоматически через центральную станцию управления и задает значения открытия НА агрегата, связанного с заданным значением расхода регулятора. Открытие направляющего аппарата или открытие лопастей рабочего колеса может использоваться в качестве сигнала обратной связи по расходу, так как они связаны соответствующими характеристиками турбины.
Центральный регулятор расхода задает график изменения расхода по времени для электростанций каскада.
При этом должны удовлетворяться следующие требования:
• быстрый пуск и синхронизация;
• адаптация к изменению напоров;
• возможность задания различных ограничений времени открытия.
5.16.5 Торможение
Торможение используется для сокращения времени вращения агрегата в процессе остановки.
8 то время как электрический и механический тормоз обычно не рассматриваются как часть управляющей системы, в особых случаях гидравлическое торможение осуществляется:
• для поворотно-лопастных турбин — увеличением угла разворота лопастей рабочего колеса в верхней части допустимого диапазона изменения числа оборотов;
• для ковшовых турбин — при помощи дополнительных тормозных сопл, которые направлены на обратную сторону ковшей.
5.16.6 Режим работы синхронного компенсатора
6 режиме синхронного компенсатора или режиме сдвига фазы генератор производит реактивную мощность. В этом режиме генератор синхронизирован. НА закрыт, рабочее колесо вращается в воздухе. или турбина выведена из сцепления с генератором. Режим синхронного компенсатора может использоваться и для поддержания вращающегося резерва, обеспечивающего быстрый ввод резервной мощности в сети.
27
ПНСТ 49—2015
5.17 Экологические условия работы систем управления
5.17.1 Виброустойчивость и ударопрочность
Установленные на турбине преобразователи часто подвергаются значительной вибрации и должны успешно противостоять вредным условиям окружающей среды.
Установленные на крышке турбины или сервомоторе направляющего аппарата датчики вибрации должны выдерживать вибрационную нагрузку в соответствующем частотном диапазоне без резонанса и не терять свою функцию:
• виброустойчивость: максимальное ускорение Sg в частотном диапазоне (10—100) Гц по МЭК 60068-2-6;
• ударопрочность: максимальное ускорение 20д по МЭК 60068-2-27.
Поскольку величина накладываемой вибрации зависит от типа турбины и от местоположения компонента. требования к ней в некоторых случаях могут быть уменьшены.
5.17.2 Температура и влажность
Технические требования.
Контрольно-измерительные приборы должны выполнять свою функцию при следующих внешних условиях:
• диапазон изменения температуры — от 5 *С до 40 ®С;
- относительная влажность — 85 % при температуре 40 *С.
Фактический диапазон изменения температуры и относительная влажность должны быть согласованы в каждом отдельном случае, при этом не должна быть достигнута точка росы. Если необходимо, должны быть приняты специальные меры (нагревание, кондиционирование воздуха и т. д.).
5.18 Электромагнитная совместимость
Соответствующие испытания на помехоустойчивость должны соответствовать МЭК 61000-4-1 и СИСПР11.
6 Применение рекомендаций
Практический выбор требований и свойств, как показано в разделах 4 и 5. должен быть сделан для определенной установки.
Необходимо различать:
• пиковые электростанции:
> базовые электростанции;
• электростанции с асинхронными генераторами.
В простых случаях требования не должны быть излишне строгими. Поэтому сказано, что в каждом из трех типов установок могут различаться два вида требований: минимальные и дополнительные.
Минимальные требования должны быть выполнены во всех случаях. Они обычно достаточны для электростанций, которыми нужно управлять с ограниченным количеством средств контроля и автоматизации.
Дополнительные требования могут возникать по требованиям энергосистемы или каскада. Они могут также отражать требования навигации, ирригации и т. д.
Для каждой категории электростанции должны быть даны рекомендации по регулированию параметров управления.
Для облегчения подготовки технических требований были разработаны приведенные ниже шаблоны технической спецификации. Данные, которые должны быть собраны покупателем или поставщиком уже в фазе запроса технического предложения, отмечены двойными вертикальными линиями в левой стороне страницы. Остальные данные нужны только во время заключения контракта или в ходе его выполнения.
Система управления гидротурбинами | Страница данных No. 6.1а | |
Покупатель: | Поставщик: | Установка: |
Дата; |
28
ПНСТ 49—2015
Данные установки
Тип турбины | ||||
Число агрегатов | ||||
Номинальная | Максимальная | Минимальная | Единица | |
Удельная энергия или напор нетто Е или Н | м/с2 или м | |||
Расход агрегата О | м3/с | |||
Мощность агрегата Р | Вг | |||
Скорость вращения л | об/мин | |||
Уровень верхнего бьефа | м над уровнем моря | |||
Уровень нижнего бьефа | м над уровнем моря | |||
Одинарное регулирование/Двоиное регулирование | Рабочее колесо | НА | ||
Игла | Огсекагвль | |||
Индивидуальные сервомоторы. HA/Vtrna N9 |
Проточная часть
Верховая сторона | Русло | Трубопровод | ||||
Длина в случае трубопровода | м | |||||
Площадь в случав трубопровода | м2 | |||||
Низовая сторона | Русло | Трубопровод | ||||
Длина в случав трубопровода | м | |||||
Площадь в случае трубопровода | м2 | |||||
Другие данные (например, о распределителях, уравнительных резервуарах и т. д.) | ||||||
Максимально допустимое давление | м(кад уровнем моря) | |||||
Минимально допустимое давление | м(кад уровнем моря) | |||||
Измеренное в точке | ||||||
Другие ограничения (например, удар, отрицательное давление и т. д.) | ||||||
Момент инерции ротора генератора /= MD*14 | | кг -м2 Момент инерции турбины и дополнительных вращающихся масс | ||||||
кгм2 | ||||||
Допустимьм рост скорости по сравнению с номинальной скоростью при снижении нагрузки | ||||||
ра>Ръ | 100 | % | ||||
Дл / л. | % | |||||
Допустимое снижение скорости при повышении нагрузки | ||||||
Pg^Gt | % | |||||
Дл /л, | % | |||||
Эксплуатационные режимы | Изолированная оеть | Сеть |
29
ПНСТ 49—2015
Режим сети | Номинальная частота | Гц | ||
Полоса частот | +/- | Гц | ||
Изолированная сеть | МВт | |||
Изолированный режим сети до | МВт | |||
Максимальный шаг по мощности | + | - | МВт | |
Допустимые изменения скорости Лл / лг | + | - | % | |
Тип нагрузки (например, преимущественно активная, двигательная, комплексная и др.) | ||||
Регулирование мощности | Направляющий аппарат | Нм | ||
Индивидуальный НА | Игла | Н-м | ||
Лопасти рабочего колеса | Отсе каталь | Н-м | ||
Другие данные | ||||
Ограничения поставки
Примечание — При отсутствии ранных в ячейке ставится прочерк.
Система управления гидротурбиной | Страница данных No. 6.2 | |
Покупатель: | Поставщик: | Установка: |
Минимальные требования к пиковой электростанции
Подпункт | |
Ручной пуск и синхронизация | |
Автоматический пуск и синхронизация | 5.14.1 |
Нестабильный режим нагрузки | |
Ручное отключение | |
Автоматическое отключение | 5.14.2 |
Местный ограничитель открытия и задатчик скорости регулятора | 5.4.1 |
Дистанционный ограничитель открытия и задатчик скорости с регулируемыми установками | 5.4.1 |
Работа на сеть с ограничителем открытия или с задатчиком скорости и малой постоянной времени демпфирования | 5.3.3 |
Сброс нагрузки и рост скорости 8 допустимых пределах | 5.14.3 |
Переходные режимы работы | |
Функция экстренного отключения | 5.15.2 |
Функция аварийного отключения | 5.15.2 |
Защита от превышения скорости | 5.15.3 |
Без автоматической функции и дистанционного управления |
Система управления гидротурбин | Страница данных No. 6.3 | |
Покупатель: | Поставщик: | Установка: |
Минимальные требования в случав электростанций базовой нагрузки
Подпуюст | |
Ручной пуск и синхронизация |
30
ПНСТ 49—2015
Нестабильный режим нагрузки | |
Ручная остановка | |
Местный ограничитель открытия и задатчик скорости при управлении | 5.4.1 |
Работа в сети с ограничителем отхрытия | 5.4.1 |
Сброс нагрузки и рост скорости в допустимых пределах | 5.14.3 |
Функция экстренного отключения | 5.15.2 |
Функция аварийного отключения | 5.15.2 |
Защита от превышения скорости | 5.15.3 |
1> Без автоматической функции и регулирования нагрузки. |
Система управления гидротурбин | Страница данных No. 6.4 |
Покупатель: Поставщик: | Установка: |
Минимальные требования к агрегатам с асинхронными генераторами
Управляющая система не имеет функции регулятора скорости | |
Ручной пуск | |
Ручное подключение к сети | |
Ручное отключение | |
Сброс нагрузки и допустимые пределы роста скорости | 5.14.3 |
Местное расположение сервомотора | |
Регулятор уровня веды (если он не включен в управление) | 4.2.5 |
Функция быстрого выключения | 5.15.2 |
Функция аварийного выключения | 5.15.2 |
Защита от превышения скорости | 5.15.3 |
Система управления гидротурбин | Страница данных No. 6.5а | |
Покупатель: | Поставщик: | Установка: |
Дополнительные требования к агрегатам пихоеой нагрузки, базовой нагрузки и асинхронным генераторам
Подпункт | ||
Изолированный режим сети в соответствии с денными страницы 6.1Ь | ||
Вход и выход для автоматического и дистанционного управления | ||
Дистанционное управление ограничителем открытия | 5.4.1 | |
Дистанционное управление задатчиком скорости | 5.4.1 | |
Автоматический пуск | 5.14.1 | |
Автоматическое отключение | 5.14.2 | |
Запуск без внешнего источника питания, энергоснабжение от: | ||
Запуск открытия в зависимости от напора | 5.14.1 | |
Настройка управляющего сигнала скорости | ||
Синхронизация | ||
Ручное управление | сэлектроншм управлением | 5.7 |
31
ПНСТ 49—2015
Ручное управление | с механической обратной связью | 5.7 |
с электронной обратной связью | ||
без обратной связи | ||
Регулирование мощности | ||
Регулирование уровня воды | ||
Экстренное отключение Аварийное отключение | 5.15.2 | |
5.15.2 | ||
Дополнительная защита от превышения скорости | Механическая | 5.15.3 |
Электрическая | ||
Блокировки | 5.15.4 | |
Тип датчика скорости | 5.6.2 | |
Тип обратной связи | 5.6.5 | |
Совместное управление несколькими агрегатами | 5.10 | |
Оптимизация управления (несколько турбин, иглы, ячейки) | ||
Взаимодействие НА и лопастей рабочего колеса в зависимости от напора (комбинаторная зависимость) | 5.5.1 | |
Регулирование перемещения | 5.16.2 |
Система управления гидротурбин | Страница данных No. 6.5b | |
Покупатель: | Поставщик: | Установка: |
Подпункт | ||
Другие требования | ||
Для примера | ||
Регулирование расхода | 5.16.4 | |
Режим работы компенсатора | 5.16.6 | |
Линеаризация | 5.8 | |
Время перехода | ||
Система управления гидротурбин | Страница данных No. 6.6а | |
Покупатель: | Поставщик: | Установка: |
Параметризация управления
подпункт | ||||||
Основной рабочий режим, с | Сеть | Изолированная оетъ | 1) п | |||
Ограничитель | Задатчик скорости | |||||
Регулятор мощности | п | |||||
Регулятор скорости | Регулирова-нив мощности | |||||
Сеть | Изолированный режим, режим без нагрузки | |||||
Остаточный стзтизм Ьп | % | 5.3.2 |
32
ПНСТ 49—2015
Коэффициент пропорциональности кр | - | 3.6.9. 3.6.10 3.6.11 и 5.3.3 | ||||
Интегральное время г, | с | |||||
Дифференциальное время Г0 | с | |||||
Автоматический переключатель в режим управления регулировкой с помощью | 5.3.3'! | |||||
Режима сети | Режима изолированной сети | |||||
Регулирование скорости | Регули рование мощно сти | 5.4.1П | ||||
Задатчик управляющего сигнала | Диапазон регулирования | % | ||||
Время регулирования | с | |||||
Ограничитель времени регулирования | с | |||||
Функция времени закрытия (см. рисунок в) | НА | % | 3.6.14 и 5.4.3 | |||
Иглы | с | |||||
Полное время закрытия | с | |||||
Диапазон регулирования | с | |||||
Время закрытия (см. рисунок 6) | Лопасти рабочего колеса | Отсекатель | с | 1) | ||
Время открытия (см. рисунок б) | НА | % | 3.6.14 и 5.4.3 | |||
Иглы | с | |||||
Время полного открытия | с | |||||
Диапазон регулирования | с | |||||
Время открытия (см. рисунок б) | Лопасти рабочего колеса | Отсекатель | 1) | |||
Готовность к синхронизации после | с | 5.14.1 | ||||
Нечувствительность управления | 5.4.2 | |||||
Защита от превышения скорости Электрическое отключение при | % | 5.15.3 | ||||
Механическое отключение при | % | |||||
Вычеркивать если не применимо. |
Система управления гидротурбин | Страница данных No. 6.6b | |||
Покупатель: | Поставщик: | Установка: | ||
подпункт | ||||
Регулирование удара | активизируется при положении НА | % | ||
при скорости удара п/п, | % | |||
при колебании расхода 0t (фиксированный) | м3/ с | |||
при колебании расхода Q/Qr | % | |||
Другие параметры, например, байпас, балластное сопротивление и т.д. | 5.16.3 |
Обеспечение фактической энергии
подпункт | |||||
Обеспечение энергией для | открытия | чем | 5.12 | ||
закрытия | чем | ») | |||
чем | 1) | ||||
Расчетное давление сервомоторов | НА | бар |
33
ПНСТ 49—2015
Индивидуальный НА | Иглы | бар | ||
Рабочее колесо | Отсвкатель | бар |
Гидравлическую насосы (стационарные и переносные)
подпункт | ||||||
Главный насос | 5.12.2.5 | |||||
Тип | ||||||
Скорость вращения | об/мин | |||||
Управляемый | ||||||
Уровень шума | дБ | |||||
Расход | ||||||
Давление | бар | |||||
Мощность | кВт | |||||
Вычеркивать если не применимо. |
Система управления гидротурбин | Страница данных No. 6.6с | ||||
Покупатель: | Поставщик: | Установка: | |||
подпункт | |||||
Аккумуляторы | 5.12.2 | ||||
Пополнение газа через | |||||
Время заполнения | с | ||||
бар | |||||
Предохранительный клапан открытия давления | % | ||||
Заключительное (максимальное) давление при потной разгрузке насосов и нулевом потреблении | % | ||||
Рабочий объем масла | Минимально используемый объем масла | vT | % | ||
Единичное управление сервомотором | |||||
Двойное управление | |||||
Резервуар маслосборника | 5.12.2.6 и 5.12.2.7 | ||||
Индикатор уровня | |||||
Фильтр байпаса | |||||
Выпуск масляного тумана | |||||
Нагрев воды | |||||
Охлаждение воды | |||||
Предупреждение от проникновения | |||||
Рабочее тело гидросистем: минеральное масло / синтетическое масло | 5.12.5 | ||||
Вязкость при МО *С | мм^/с | ||||
Другие данные (напр. по плотности, разделению воды и деаэрации потенциапа. антикоррозионные свойства и др.) | |||||
Другие данные
подпункт | |
Тил тормоза | 5.16.5 |
34
ПНСТ 49—2015
Параметры сервомотора (точность, постоянная времени и тд.) | 5.4.3 | |||
Преобразователи | Принципиальные | Маркер'тип | ||
перемещения | ||||
давления | ||||
температуры | ||||
скорости | ||||
Система управления гидротурбин | Страница данных No. 6.6d | ||||
Покупатель: | Поставщик: | Установка: | |||
Переключатели ограниче-ния | Принципиальные | Изготовитель/тип | |||
Распределительные клапаны Инструменты цифровой/аналоговый | Изгоговитель/тип | ||||
прямой/непрямой | |||||
размер | |||||
точность | |||||
изготовитель/тип | |||||
Индикация оостояния | |||||
Индикация неисправностей | |||||
Электроснабжение | |||||
Станционная сервисная сеть | ♦/-В | Гц | |||
Безопасный источник переменного тока | +/-В | Гц | |||
Источник постоянного тока | +/-В | ||||
Вт | |||||
Проводной терминал сечением до мм | |||||
Тип | |||||
Кабель марки | |||||
35
ПНСТ 49—2015
Приложение А
(обязательное)
Упрощенные дифференциальные уравнения и передаточные функции идеализированных
ПИД'регуляторов
Эта инструкция использует в максимальной степени термины и определения, используемые в настоящем стандарте. Ниже приведены упрощенные дифференциальные уравнения и передаточные функции идеализированных ПИД-регуляторов, использующихся еденной инструкции.
Два широко используемых в управлении гидротурбин ПИД-регулятора показаны на рисунках А.1 и А.2.
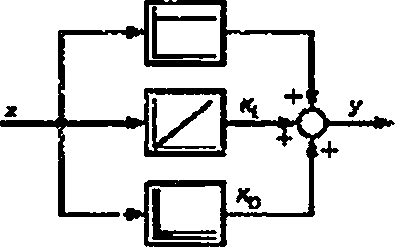
Рисунок А.1 — Идеализированный ПИД в чистой параллельной структуре
Дифференциальные уравнения и передаточные функции идеализированного П ИД-регулятора с:
• составным коэффициентов! действия К,:
• составным временем действия
• дифференциальным коэффициентом действия Kq:
• дифференциальным временем действия Г0;
• пропорциональным коэффициентов! действия Кр
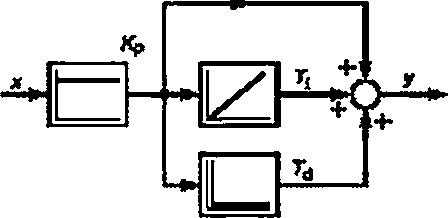
Рисунок А.2 — Альтернативное представление идеализированного ПИД
Дифференциальные уравнения и передаточные функции идеализированного ПИД-регулягора с:
- временем сброса Т,;
• заданным временем Td;
• пропорциональным коэффициентом действия Кр
х — относительное отклонение регулируемом перемен-
ж — относительное отклонение регулируемой перемен
ной;
у — установка для относительного смещения поршня сервомотора; t — время;
а—комплексная переменная преобразования Лапласа. Дифференциальное уравнение (регулятор без сервомотора):
— = Кр—+К,х + К0^-£-. dx р d/ ‘ 0 d<2
Интегрированное:
y(0=KpX + Kjxdf + Ko^. Соответственно
y(0=KpX + ^-Jxdf + rD^-
ной;
у — установка для относительного смещения поршня сервомотора;
I— время:
s—комплексная переменная преобразования Лапласа. Дифференциальное уравнение (регулятор без сервомотора):
— = Кр х dx р
Интегрированное:
у(/)= Кр х
d*x
£U*+r0_ df т; 0 d{2
x + lj*df + rD^
Передаточные функции (регулятор без сервомотора):
Передаточные функции (регулятор без сервомотора):
Соответственно:
F(s)e£i£ieKp+—+70s ' ' x(s) р 0
36
ПНСТ 49—2015
Приложение В
(справочное)
Сетевое регулирование частоты
В.1 Общее
Приложение В дает краткое описание сетевого регулирования частоты, которое описано в кодексах сети для управления объединенными энергетическими системами. Обычно такое регулирование частоты осуществляется в иерархической структуре управления: первичное регулирование, вторичное регутрование и г.д,. с выделением нескольких часгогорегулирующих электростанций.
Первичное регулирование частоты необходимо для балансирования мощностью потребления с мощностью генерации.
Вторичное регулирование частоты требуется для восстановления первичных резервов мощности и обмена мощностью.
В.2 Баланс мощности и частота сети
8.2.1 Баланс мощности
В любой электроэнергетической системе фактическая мощность производится и потребляется в одно и то же время. Произведенная мощность должна находиться с потребляемой мощностью в постоянном равновесии. Нарушение баланса, вызванное отклонением сетевой частоты от заданной величины, компенсируется увеличением или уменьшением мощности вращающихся генераторов и связанных двигателей.
Возможности накопления и хранения электроэнергии весьма ограничены, поэтому система управления генерацией должна гибко изменять величину вырабатываемой мощности для поддержания баланса энергосистемы.
В.2.2 Частота сети
Частота / сети пропорциональна скорости вращения синхронных генераторов (частота равна скорости вращения. отнесенной к числу пар полюсов синхронного генератора).
При увеличении потребления (или уменьшении мощности генерации) частота сети (и скорость вращения генераторов) уменьшается, а при уменьшении потребления частота сети (и скорость вращения генераторов) увеличивается.
В.З Первичное регулирование частоты
8.3.1 Первичное регулирование частоты в исполнении энергоблоков
Для восстановления баланса между потреблением и выработкой система регулирования автоматически вырабатывает воздействие в соответствии с располагаемым запасом регулирования. Изменение частоты будет зависеть от инерции системы и скорости регулирования. Поэтому, первичное регулирование частоты выполняется системой регулирования агрегатов, вовлеченных в этот процесс, в течение нескольких секунд или десятков секунд, пока не будет восстановлен баланс мощности энергосистемы. Вклад агрегата в устранение колебаний частоты в сети зависит, главным образом, от статизма регулятора (см. ниже), и запаса регулирования агрегата.
При восстановлении баланса мощности частота в сети стабилизируется на установившемся значении, которое мажет отличаться от заданного значения частоты из-за статизмаагрвгатов. обеспечивающих пропорциональный тип регулирования.
8.3.2 Статизм агрегата
Стагизм агрегата выражен следующим отношением (без измерения)
SG = -W(aP^PG г)-
Это связано с остаточным статизмом системы регулирования турбины. Принципиальная функциональная схема такого статизма при регулировании мощности показана на рисунке В.1 (та же схема может быть нарисована, используя дР& + (1/6р) Д/перед ПИД-регулятором).
Как на рисунке, мы рассматриваем две связанных электростанции э и 6 с различными значениями статизма при условии баланса, но с одинаковым запасом регулирования.
37
ПНСТ 49—2015
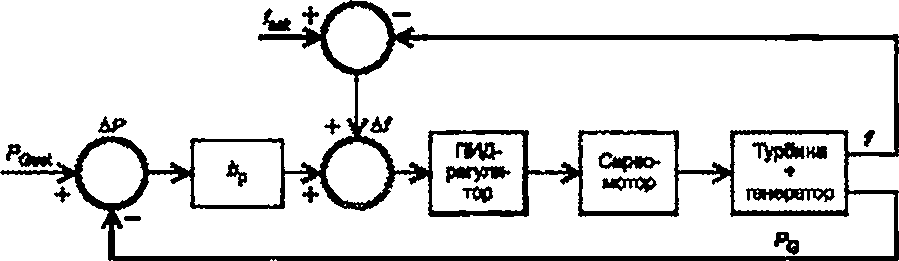
Рисунок В. 1 — Пример принципиальной функциональной схемы агрегата с системой регулирования турбины на основе идеального ПИД-регулятора со статизмом по мощности
На рисунке В.2 показано взаимодействие выходной мощности агрегата и частоты сети. В случае незначительного нарушения баланса (сдвиг частоты < Л/ь) вклад агрегата а (который имеет наименьшее значение стзтиз-ма) в восстановление баланса будет больше, чем вклад агрегата Ь, который имеет наибольшее значение статизма. Изменение частоты Afa. при котором будет выбран резерв первичного регулирования агрегата а (т.е. где выходная энергетическая мощность достигает своего максимального значения Ртах) будет меньше, чем агрегата b (Д/ь), даже если оба агрегата имеют одинаковые запасы первичного регулирования. Следует отметить, что если управление на взаимосвязанных агрегатах было скорректировано с учетом нулевого остаточного статизма. нагрузка системы между агрегатами не будет распределяться эффективно. Различия ао времени отклика агрегатов и калибровке управления в конечном счете приведет к загрузке одного агрегата на большую мощность, другого — на меньшую мощность.
Пр0к8аОДвнн*я мощность^
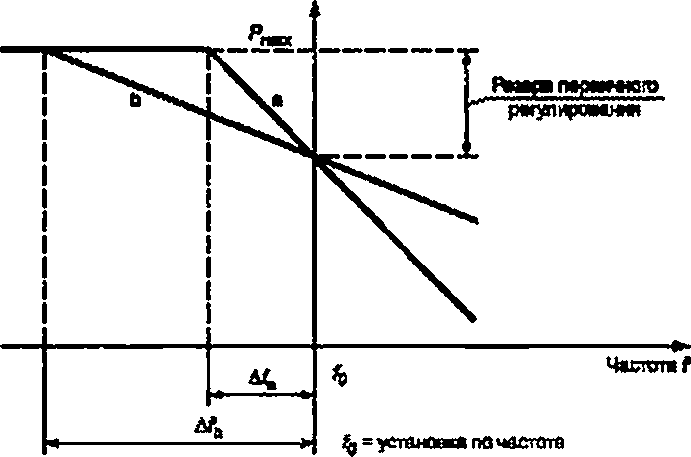
Рисунок В.2 — Поведение двух агрегатов с различным остаточным статизмом
В.4 Вторичное регулирование частоты
Как отмечено выше, первичное регулирование позволяет восстановить баланс частоты энергосистемы при возникновении внезапного рассогласования въфаботки и потребления электроэнергии (например, как последствие аварии) или при случайном отклонении от баланса, но с определенным отклонением частоты А/.
Кроме того, для различных частей большой взаимосвязанной энергосистемы дисбаланс между выработкой электроэнергии и потреблением в любой точке изменит запланированные и согласованные между компаниями перетоки мощности между частями системы (регулирование каждой области влияет на процесс регулирования частоты в глобальной связанной системе).
38
ПНСТ 49—2015
Приложение С
(справочное)
Экстренное отключение и аварийное отключение
С.1 Общие положения
Как указано в 5.15.2.5. в практике эксплуатации широко используется несколько стратегий отключения, которые зависят от комбинации критериев, различия устройств закрытия сервомотора и последовательности действий отключения.
Условия экстренного и аварийного закрытия не могут быть стандартизированы в настоящее время, потому что в различных странах используется различная (иногда противоречивая) терминология.
Настоящее приложение 8 качестве примера содержит две различных широко испопьзуетх стратегии аеа-рийного/экстренного отключения.
С.2 Альтернативный пример I
С.2.1 Общее
Основная цель этой стратегии состоит в ограничении числа отключений, при которых используются устройства аварийного закрытия и'или происходит превышение скорости, что приводит к меньшему числу операций отключения без снижения необходимого уровня надежности.
С.2.2 Экстренное отключение
С.2.2.1 Определение
Экстренное отключение выполняется при возникновении дефектов в агрегате при работающей системе регулирования турбины. Агрегат отключается в течение короткого времени закрытия сервомотора НА, сигнал на закрытие НА дается автоматическому регулятору частоты и/или электрогидравлическому устройству закрытия.
С.2.2.2 Реализация
Электронное, электрическое и (при наличии) параллельно работающее электромеханическое или электро-гидравлическое устройства разработаны для обеспечения непосредственного и полного смещения главного золотника в крайнее положение.
С.2.2.3 Экстренное отключение, механические ошибки (QSD-M)
В случае ошибок в механической части агрегата (например, подшипники, управление давлением масла, уровень масла) и для недопущения перенапряжений агрегата от превышения скорости вращения не требуется немедленно отключать выключатель генератора. Пока выключатель генератора замкнут, никакое превышение скорости не произойдет. Выключатель генератора должен быть отхлючен с задержкой (при открытии направляющего аппарата холостого хода турбины, полностью вставленном отсекателе ковшовых турбин или при достижении нулевой выходной мощности).
С.2.2.4 Экстренное отклонение, электрические ошибки (QSD-E)
В случае ошибок в электрической части агрегата (например, электрической части генератора) выключатель генератора немедленно отключается.
С.2.3 Аварийное отключение
С.2.3.1 Определение
Аварийное отключение осуществляется в случае превышения скорости, серьезных ошибок в системе регулирования турбины или при подаче команды на аварийное отключение. Управление и^или система измерения скорости не работают. Агрегат отключается или закрытием НА. игнорируя регулирование, и некоторыми другими элементами системы управления агрегата и/или закрытием главного золотника или турбинного затвора.
Сигналы, вызывающие аварийное отключение, должны быть связаны с простым и надежным устройством закрытия НА. которое не зависит от главной системы управления агрегатом, или с избыточной системой управления агрегата.
С.2.3.2 Реализация
Электромеханическое или элвктрогидравлическое устройство закрывает главный сервомотор, минуя иные этапы управления. Дополнительно или альтернативно запущено закрытие шарового затвора, клапанного затвора или секторного турбинного затвора.
Условия аварийной остановки обеспечиваются:
• дополнительным масляным объемом в гидравлической системе;
• специальным запасом масла высокого давления:
• собственным весом агрегата:
• давлением воды (например, для отсекателя ковшовой турбины высок он ал ор ной установки):
• пружиной.
Отключение может произойти по следующим причинам:
• превышение скорости агрегата;
39
ПНСТ 49—2015
• серьезная проблема управления (например, отказ контролера);
• возникновение опасности для персонала и станции (например, затопление):
• нажатие кнопки аварийного отключения агрегата.
С.2.3.3 Автоматическое аварийное отклонение (ESD-A)
Аварийное автоматическое отключение начинается при превышении скорости или серьезных неполадках в системе регулирования турбины. Во избежание перенапряжения агрегатов от превышения скорости немедленно отключать выключатель генератора не следует. Пока выкгкчатель генератора включен, превышения скорости не будет. Выключатель генератора должен быть отключен с задержкой (приблизительно в положении открытия направляющего аппарата на холостом ходе, полностью вставленном отсека теле ковшовых турбин или в момент, когда выходная мощность равна нулю).
С.2.3.4 Кнопка аварийного отключения (ESD-PB)
Кнопка аварийного отключения должна быть нажата в случаях, когда дежурный инженер станции замечает ситуацию, требующую отключения агрегата. В этом случае выключатель генератора отключается немедленно, так как системе управления агрегата недоступна информация о характере и типе возникшей неисправности.
С.2.4 Сводная таблица и смешанные случаи отключения
Таблица С.1 суммирует различные случаи экстренного и аварийного отключения.
Для гарантии безопасности агрегата необходимо обеспечить правильность действий при отключении агрегата. Основные правила:
• аварийное отключение (ESD) имеет приоритет выше, чем экстренное отключение (QSD);
• непосредственное отключение выключателя генератора имеет более высокий приоритет, чем отключение с задержкой.
Пример — Комбинация ESD-A с QSD-Е должна привести к аварийному закрытию агрегата, игнорируя управление, и к непосредственному отключению выключателя генератора (результат подобен ESD-PB).
Таблица С.1 — Альтернатива I — Резюме случаев экстренного и аварийного отключения
Случай отключения | Критерий отключения | Статус управления | Действия | |||
опере* тиемое | нера ботаю щий | |||||
QSD-M | Экстренное отключение. механическая неисправность | Механическая неисправность в агрегате | X | Задержка автоматического отключения выключателя генератора (без нагрузки открытия или PG*0) | Завершение работы за кратчайшее время закрытия сервомотора передачей управляющей команды и/или с помощью электроги-дравличесхого устройства отключения. | |
QSD-E | Экстренное отключение. электрическая неисправность | Электрическая неисправность а агрегате | X | Немедленное отключение автоматического выключателя генератора | ||
ESD-A | Автоматическое аварийное отключение | Превышение скорости, серьезные недостатки в системе управления | X | Задержка срабатывания автоматического выключателя генератора (без нагрузки или Р6 * 0 или позднее. когда открытие НА будет = 0) | Аварийная остановка путем игнорирования управления и других элементов системы управления агрегата и(или с помощью закрытия шарового, клапанного или иного типа турбинного затвора | |
ESD-PB | Кнопка аварийного закрытия | Решение оператора | Нерелевантные | Немедленное отключение выключателя генератора |
40
ПНСТ 49—2015
Окончание таблицы С.1
Случай отключения | Критерий отключения | Статус управления | Действия |
ооера* гионое | нера ботаю щий | ||
Смешанные случаи | ESD имеет более высокий приоритет, чем QSD. Немедленное автоматическое отключение выключателя генератора имеет болев высокий приоритет, чем отключение с задержкой срабатывания. | ||
Рекомендуется работать QSD и/или ESD клапанами е конце нормальной остановки турбины. Кроме того периодическое функциональное испытание QSD и/или ESO клапанов является целесообразным. |
С.З Альтернативный пример II
Некоторые клиенты и поставщики осуществляют функции безопасности быстрого закрытия и аварийного закрытия альтернативным менее обширным способом, при помощи единственного клапана закрытия, который активируется в случае любой неисправности. Работа клапана закрытия игнорирует команды системы управления.
В этом альтернативном решении есть только два случая отключения:
• экстренное отключение (OSO) — в случае механической ошибки или серьезных ошибок в управляющей системе:
• аварийное отключение {ESD) — в случае электрического сбоя или аварийного отключения кнопкой, нажатой оператором.
В таблице С.2 приведены различные случаи экстренного и аварийного отключения для этого примера. Таблица С.2 — Альтернатива II — Резюме случаев для экстренного и аварийного отключения
Случай отключения | Критерий отключения | Статус управления | Действия | ||
опера тивное | нерабо’ тающий | ||||
QSD | Экстренное отключение | Механическая неисправность в агрегате или серьезные недостатки в системе управления | Нерелевантные | Задержка отключения автоматического выключателя генератора {без нагрузки или при Pq»0) | Остановка путем игнорирования управления и других элементов системы управления агрегата и'или с помощью закрытия шарового, клэ-панного или иного турбинного затвора |
ES0 | Аварийное отключение | Электрическая неисправность в агрегате или аварийное отключение кнопкой, нажатой оператором | Нерелевантные | Немедленное отключение автоматического выключателя генератора | |
Объединенные случаи | ESD имеет более высокий приоритет, чем QSD. Немедленное отключение автоматического выключателя генератора имеет более высокий приоритет, чем с задержкой срабатывания |
^хомендуется использовать клапан отключения в конце нормальной остановки турбины. Кроме того периодическое функциональное испытание клапана отключения является обязательным.
41
ПНСТ 49—2015
Приложение ДА
(справочное)
Сведения о соответствии ссылочных международных стандартов национальным стандартам Российской Федерации и действующим в этом качестве межгосударственным стандартам
Таблица ДА.1
Обозначение ссылочного международною стандарта | Степень соответствия | Обозначение и наименование соответствующего национального, межгосударственного стандарта |
ИСО 3448:1992 | — | • |
МЭК 60050-351:2013 | — | • |
МЭК 60068-2-6:2007 | МОО | ГОСТ 28203—89 (МЭК 68-2-6—82) «Основные методы испытаний на воздействие внешних факторов. Часть 2. Испытания. Испытание Fc и руководство: Вибрация (синусоидальная)» |
МЭК 60068-2-27:2008 | МОО | ГОСТ 28213—89 (МЭК 68-2-27—87) «Основные методы испытаний на воздействие внешних факторов. Часть 2. Испытания. Испытание Еа и руководство: Одиночный удар» |
МЭК 60308:2005 | ют | ПНСТ 48—2015/МЭК 60308(2005) «Системы, регулирующие скорость вращения гидравлических турбин. Международные нормы и правила испытаний» |
МЭК 61000-4-1:2006 | NEQ | ГОСТ Р 50628—2000 «Совместимость технических средств электромагнитная. Устойчивость машин электронных вычислительных персональных к электромагнитным помехам. Требования и методы испытаний» |
СИСПР 11:2004 | МОО | ПОСТ Р 51318.11—2006 (СИСПР 11:2004) «Совместимость технических средств электромагнитная. Промышленные, научные, медицинские и бытовые (ПНМБ) высокочастотные устройства. Радиопомехи индустриальные. Нормы и методы измерений» |
* Соответствующий национальный стандарт отсутствует. До его утверждения рекомендуется использовать | ||
перевод на русский язык данного международного стандарта. Перевод данного международного стандарта | ||
находится в федеральном информационном фонде технических регламентов и стандартов. | ||
Примечание — В настоящей таблице использованы следующие условные обозначения степени соответствия стандартов: - ЮТ — идентичные стандарты: - МОО — модифицированные стандарты: - NEQ — неэквивалентные стандарты. |
42
ПНСТ 49—2015
УДК 621.224:006.354 ОКС 27.140
Ключевые слова: ГЭС. управление, скорость вращения, мощность, уровень воды, направляющий аппарат. игла, отсекатель. расход воды, активные и реактивные турбины, регулирование скорости вращения. регулирование уровня, регулирование расхода
Редактор Е.В. Алехина Технический редактор В.Н. Прусакова Корректор М.И. Першина Компьютерная верегха Е.О. Асгпашина
СдановнаборОЗ.11.2015. Подписано в печать 26.11.2015. Формат 60*84%. Гарнитура Ариел. Уел. печ. л. 5.12. Уч.-иэд. л. 4.80. Тираж 31э*э. Зак. 3835.
Издано и отпечатано во . <23995 Москва. Гранатный пер.. 4. wwwgoslxifo.ru
{kind=link}